
Oleh Alexander Sembiring - digilib.unila.ac.iddigilib.unila.ac.id/27018/10/SKRIPSI TANPA BAB...
55
KAJI ANALITIK DAN NUMERIK KARAKTERISTIK DINAMIK SISTEM POROS ROTOR BERTINGKAT (DUAL ROTOR) MENGGUNAKAN PEMODELAN ELEMEN HINGGA DAN METODE PSEUDO MODAL (Skripsi) Oleh Alexander Sembiring JURUSAN TEKNIK MESIN FAKULTAS TEKNIK UNIVERSITAS LAMPUNG BANDAR LAMPUNG 2017
Transcript of Oleh Alexander Sembiring - digilib.unila.ac.iddigilib.unila.ac.id/27018/10/SKRIPSI TANPA BAB...

KAJI ANALITIK DAN NUMERIK KARAKTERISTIK DINAMIK SISTEM POROS ROTOR BERTINGKAT (DUAL ROTOR) MENGGUNAKAN PEMODELAN ELEMEN HINGGA DAN METODE PSEUDO MODAL
(Skripsi)
Oleh
Alexander Sembiring
JURUSAN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2017

ABSTRACT Industrial machinery now significantly growth. The use of industrial rotor shaft systems is used in steam compressors, low-pressure and high-pressure centrifugal compressors, gas turbines and aircraft engines. The rotor shaft system will operate properly if it does not rotate near the natural frequency area (critical speed), because if the rotor shaft system operates close to the natural frequency (critical speed) it will cause resonance and will cause failure of the system. The rotor shaft system (single rotor and dual rotor) will be modeled into a 1-dimensional model and divide it into several elements using finite element method and the equation of motion of the system is derived from energy method, solved by pseudo-modal method compiled in the programming language of the software MATLAB (R2015a). The result of the dynamic characteristics obtained is the natural frequency and the mass unbalance response predictions. The natural frequency of this rotor shaft system is influenced by the elements used in the rotor shaft system and expressed in the speed function (ω) plotted in the Campbell diagram. The percentage of differences obtained between the computed computing program and the reference is about 0.11% - 6.6% for the single rotor system, and 0.15% - 3.9% for the dual rotor system. While the difference of price percentage to 3D model case study is 0,595% - 4,488%, and to case study of 1D model 0,359% - 6,470%. Keyword: Campbell diagram, finite element method, pseudo-modal, dual rotor.

ABSTRAK
Mesin-mesin industri saat ini terus mengalami perkembangan yang sangat signifikan. Penggunaan sistem poros rotor dalam dunia industri diantaranya digunakan pada kompresor uap, kompresor sentrifugal tekanan rendah dan tinggi, turbin gas, dan mesin pesawat. Sistem poros rotor akan beroperasi dengan baik jika tidak berputar di dekat daerah frekuensi pribadinya (putaran kritis), karena jika sistem poros rotor beroperasi dekat dengan frekuensi pribadinya (putaran kritisnya) maka akan menimbulkan resonansi dan akan menyebabkan kegagalan pada sistem. Sistem poros rotor (single rotor dan dual rotor) akan dimodelkan menjadi model 1 dimensi dan membaginya menjadi beberapa elemen menggunakan pemodelan elemen hingga dan persamaan gerak sistem diturunkan dari metode energi dan dieselesaikan dengan metode pseudo-modal yang disusun pada bahasa pemrograman teknik yakni software MATLAB (R2015a). Hasil karakteristik dinamik yang didapatkan adalah frekuensi pribadi dan predikisi respon massa tak imbang. Frekuensi pribadi sistem poros rotor ini dipengaruhi oleh elemen-elemen yang digunakan dalam sistem poros rotor dan dinyatakan dalam fungsi kecepatan ( ) yang diplot dalam diagram Campbell. Persentase perbedaan harga yang diperoleh antara program komputasi yang disusun dan harga berdasarkan referensi sekitar 0,11 % - 6,6 % untuk sistem single rotor, dan 0,15 % - 3,9 % untuk sistem dual rotor. Sedangkan perbedaan persentase harga terhadap studi kasus model 3D sebesar 0,595% - 4,488%, dan terhadap studi kasus model 1D sebesar 0,359% - 6,470%.
Kata kunci; diagram Campbell, metode elemen hingga, pseudo-modal, dual rotor.

KAJI ANALITIK DAN NUMERIK KARAKTERISTIK DINAMIK SISTEM POROS ROTOR BERTINGKAT (DUAL ROTOR) DENGAN
PEMODELAN ELEMEN HINGGA DAN METODE PSEUDO MODAL
Oleh
Alexander Sembiring
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar
SARJANA TEKNIK
Pada
Jurusan Teknik Mesin Fakultas Teknik
Universitas Lampung
JURUSAN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2017

:


RIWAYAT HIDUP
Penulis dilahirkan di Kota Medan, pada tanggal 15 Juli
1994. Penulis merupakan anak ketiga dari empat
bersaudara pasangan Bapak A. Sembiring dan J.
Sinukaban. Penulis menyelesaikan pendidikan dasar di
SD Sejahtera III Sindang Sari pada tahun 2005,
pendidikan menengah pertama di SMP Negeri 2
Tanjung Bintang pada tahun 2008, dan pendidikan menengah atas di SMA Lentera
Harapan Jati Agung pada tahun 2011. Penulis melanjutkan pendidikan di jurusan
Teknik Mesin Fakultas Teknik Universitas Lampung pada tahun 2012 melalui jalur
SBMPTN.
Selama menjadi mahasiswa, penulis pernah aktif di organisasi kemahasiswaan
diantaranya, Himpunan Mahasiswa Teknik Mesin (HIMATEM) di bidang
Advokasi dan Badan Eksekutif Mahasiswa Fakultas Teknik (BEM-FT) sebagai
anggota Komisi Dua, dan Pengurus Forum Komunikasi Mahasiswa Kristiani
Fakultas Teknik (FKMK-FT). Penulis pernah aktif juga pada organisasi di luar
kampus seperti Lembaga Pelayanan Mahasiswa Indonesia Lampung (LPMI)
sebagai ketua pelayanan kampus mahasiswa, ketua Reading Bible Fellowship
(RBF), dan sebagai Volunteer Lembaga Leadership Delta Young Leader Lampung
(Delta-YL).

Penulis melaksanakan Kuliah Kerja Nyata Tematik (KKN-Tematik) pada tahun
2016 di desa Way Sindi Hanuan, Kecamatan Karya Penggawa, Kabupaten Pesisir
Barat, Provinsi Lampung. Penulis juga telah melaksanakan Program Kerja Praktik
(KP) di PT. PLN (Persero) Pembangkitan Sumatra Bagian Selatan pada tahun 2015.
Penulis melakukan penelitian dengan judul “Kaji Analitik dan Numerik
Karakteristik Dinamik Sistem Poros Rotor Bertingkat (Dual Rotor) Menggunakan
Pemodelan Elemen Hingga dan Metode Pseudo-Modal” dibawah bimbingan Bapak
Zulhendri Hasymi, S.T., M.T., dan Dr. Asnawi Lubis, S.T., M.Sc.

Motto
Sebab yang sangat penting telah kusampaikan kepadamu, a yaitu apa
yang telah kuterima b sendiri, ialah bahwa Kristus telah mati karena
dosa-dosa kita, c sesuai dengan Kitab Suci, bahwa Ia telah dikuburkan,
dan bahwa Ia telah dibangkitkan, pada hari yang ketiga, sesuai dengan
Kitab Suci; (1 Kor 15:3-4)
Sebab jika kamu mengaku dengan mulutmu, bahwa Yesus adalah
Tuhan, dan percaya dalam hatimu, bahwa Allah telah membangkitkan
Dia dari antara orang mati, maka kamu akan diselamatkan. Karena
dengan hati orang percaya dan dibenarkan, dan dengan mulut orang
mengaku dan diselamatkan. (Rom 10:9-10)

Persembahan
Sebuah Karya Kecilku....
Dengan segenap hati kupersembahakan tugas akhir ini kepada:
Tuhan Yesus Kristus
Atas Anugrah-Nya semua ini ada
Atas berkat-Nya semua ini aku dapatkan
Atas kekuatan dari-Nya aku bisa bertahan
Orang tuaku sebagai tanda baktiku, terimaka kasih atas segalanya, doa,
kasih sayang, pengorbanan, keikhlasannya. Ini hanyalah bagian terkecil
balasan yang tidak bisa dibandingkan dengan berjuta-juta pengorbanan
dan kasih sayang yang tidak setara dengan apapun di dunia ini.
Adek-adekku, atas doa, kasih sayang dan dukungan
Para pengajar sebagai tanda hormatku,
terima kasih atas ilmu yang telah diberikan.
Serta tak lupa kupersembahkan kepada Almamaterku tercinta,
Semoga kelak berguna dikemudian hari.

SANWACANA
Terpujilah Tuhan Yesus Kristus dari selama-lamanya sampai selama-lamanya. Puji
Tuhan karena kasih dan anugerah dari Tuhan Yesus kristus penulis dapat
menyelesaikan skripsi ini yang berjudul “Kaji Analitik dan Numerik Karakteristik
Dinamik Sistem Poros Rotor Bertingkat (Dual Rotor) Menggunakan Pemodelan
Elemen Hingga dan Metode Pseudo-Modal”. Skripsi ini merupakan salah satu
syarat untuk memperoleh gelar Sarjana Teknik di Jurusan Teknik Mesin Fakultas
Teknik Universitas Lampung.
Penulis menyadari sepenuhnya bahwa terselesaikannya penyusunan skripsi ini
tidak terlepas dari bantuan berbagai pihak. Oleh karena itu, penulis mengucapkan
terima kasih kepada:
1. Bapak Prof. Dr. Ir. Hasriadi Mat Akin, M.P., selaku Rektor Universitas
Lampung.
2. Bapak Prof. Dr. Suharno, M.Sc., selaku Dekan Teknik Universitas Lampung
beserta staff dan jajarannya yang telah memberikan bantuan kepada penulis
dalam menyelesaikan skripsi ini.
3. Bapak Ahmad Suudi, S.T., M.T., selaku Ketua Jurusan Teknik Mesin
Universitas Lampung yang telah memberikan kemudahan kepada penulis dalam
menyelesaikan skripsi ini.

4. Bapak Zulhendri Hasymi, S.T., M.T., selaku Dosen Pembimbing I yang telah
bersedia meluangkan waktunya untuk membimbing, memberikan perhatian,
dan memotivasi selama penyusunan skripsi sehingga skripsi ini menjadi lebih
baik.
5. Bapak Dr. Asnawi Lubis, S.T., M.T., selaku Dosen Pembimbing II dan yang
telah bersedia meluangkan waktu untuk membimbing, memberikan sumbangan
pemikiran, kritik, dan saran kepada penulis demi terselesaikannya skripsi ini
serta memberikan kesempatan bagi penulis untuk membantu beliau sebagai
asisten dosen.
6. Ibu Novri Tanti, S.T., M.T., selaku pembahas yang telah memberikan masukan
baik kritik maupun saran yang sangat bermanfaat untuk penulis.
7. Bapak dan Ibu dosen Teknik Mesin Fakultas Teknik Universitas Lampung yang
telah memberikan bekal ilmu pengetahuan kepada penulis.
8. Kedua orang tuaku, Bapak (A. Sembiring) dan Ibu (J. Sinukaban) terima kasih
atas perhatian dan kasih sayang yang telah diberikan serta doanya dari awal
perkuliahan sampai selesai, Tuhan memberkati.
9. Kakak (Asni M., S.Si., dan Ria M. Munte), abang (Budi A., S.T., dan F. Tarigan,
S.E.), dan adik (Roni J. Pandia) terimakasih atas segala dukungan yang sudah
diberikan selama ini.
10. Bapak Pdt. Ferri Lee M.Div (이장규), Ibu Won (원산영), Lee Min Ju (이민주),
dan Lee Jong Hak (이종학) terimakasih atas dukungan dan doa yang diberikan
selama ini, yang terus memberi kesempatan, banyak memberikan inspirasi dan
pengalaman baru, 감사합니다.
11. Megi P Candela S.I.K dan seluruh keluarga (Bapak Sugeng Suprayogi, Ibu
Retna Widijastuti, Ok Yori Prawi Egasi dan Ok Yore Prawi Egasi)., terimakasih
sudah memberikan, doa, semangat dan dukungan dari awal perkuliahan hingga
sampai akhir perkuliahan ini selesai.
12. Teman-teman seluruh angkatan 2012 di Teknik Mesin atas kebersamaannya
selama ini dan semua bantuan yang telah diberikan. Semoga kebersamaan kita
selalu menjadi memori positif.
13. Kakak-kakak tingkat Teknik Mesin angkatan 2010, dan 2011 serta adik-adik
tingkatku angkatan 2013, 2014, dan 2015 terima kasih atas kebersamaan dan
doanya.
14. Teman-teman di Reading Bible Fellowship (RBF) atas doa, dukungan, dan
pengalamannya selama ini.
15. Mas Marta, Mas Dadang, Mas Nanang dan Mas Zalzali, terima kasih atas
bantuannya selama ini, terima kasih banyak.
16. Almamater tercinta yang telah mendewasakanku.
17. Semua pihak yang telah membantu dalam penyusunan skripsi ini.
Terimakasih atas dukungannya, semoga skripsi ini bisa bermanfaat untuk banyak
orang dan menjadi alat untuk kemulian Tuhan Yesus Kristus.
Bandar Lampung, 12 Juni 2017 Penulis
Alexander Sembiring

DAFTAR ISI
ABSTRACT
ABSTRAK
HALAMAN JUDUL
HALAMAN PENGESAHAN
PERNYATAAN PENULIS
RIWAYAT HIDUP
PERSEMBAHAN
MOTTO
SANWACANA
DAFTAR ISI ........................................................................................................... i
DAFTAR GAMBAR ............................................................................................ iv
DAFTAR TABEL ................................................................................................ vi
DAFTAR SIMBOL ............................................................................................. vii
I. PENDAHULUAN........................................................................................... 1
1.1 Latar Belakang .......................................................................................... 1
1.2 Batasan Masalah ....................................................................................... 4
1.3 Tujuan ....................................................................................................... 5
1.4 Sistematika Penulisan ............................................................................... 5
II. TINJAUAN PUSTAKA ................................................................................. 7
2.1 Sistem Poros Rotor ................................................................................... 7
2.2 Karakteristik Dinamik Elemen Sistem Poros Rotor ................................. 8
2.3 Metode Elemen Hingga Pada Sistem Poros Rotor ................................... 9
2.3.1 Elemen hingga rotor (disk) ............................................................ 11
2.3.2 Elemen hingga poros ..................................................................... 12
2.3.3 Elemen hingga bantalan (bearings) dan seals ............................... 17

ii
2.3.4 Elemen hingga massa tak imbang ................................................. 18
2.4 Persamaan Gerak Sistem Poros Rotor .................................................... 20
III. METODE PENELITIAN ............................................................................ 25
3.1 Studi Literatur dan Pengumpulan Data ................................................... 25
3.2 Kaji Analitik............................................................................................ 25
3.3 Penyusunan Program .............................................................................. 26
3.4 Pengujian Program Sistem Poros Rotor .................................................. 27
3.5 Bagan Alir Penelitian .............................................................................. 28
IV. HASIL DAN PEMBAHASAN .................................................................... 29
4.1 Kaji Analitik Sistem Poros Rotor Sederhana .......................................... 29
4.1.1 Elemen hingga rotor ...................................................................... 31
4.1.2 Elemen hingga poros ..................................................................... 31
4.1.3 Elemen hingga bantalan dan seals ................................................. 34
4.1.4 Penyusunan matriks global sistem poros rotor sederhana ............. 34
4.2 Kaji Numerik Sistem Poros Rotor Sederhana ......................................... 37
4.3 Kaji Numerik Sistem Poros Multi Rotor ................................................ 39
4.3.1 Pemodelan elemen hingga sistem poros multi rotor ...................... 39
4.3.2 Hasil perhitungan komputasi ......................................................... 41
4.4 Kaji Numerik Sistem Poros Bertingkat (Dual Rotor) ............................. 46
4.4.1 Pengglobalan matriks sistem dual rotor ......................................... 48
4.4.2 Pemodelan elemen hingga sistem dual rotor ................................. 50
4.4.3 Hasil penghitungan komputasi ....................................................... 52
4.5 Studi Kasus Sistem Dual Rotor .............................................................. 57
V. KESIMPULAN DAN SARAN .................................................................... 68
5.1 Kesimpulan ............................................................................................. 68
iii
5.2 Saran ....................................................................................................... 69
DAFTAR KEPUSTAKAAN .............................................................................. 70
LAMPIRAN ......................................................................................................... 72

iv
DAFTAR GAMBAR
Gambar 1 Sistem poros sederhana. ......................................................................... 8
Gambar 2 Kerangka acuan disk pada poros fleksibel ........................................... 11
Gambar 3 Elemen hingga poros. ........................................................................... 12
Gambar 4 Kekakuan dan redaman bearings ...................................................... 17
Gambar 5 Massa tak imbang ................................................................................. 19
Gambar 6 Pemodelan sistem poros rotor bertingkat (dual rotor) ......................... 21
Gambar 7 Bagan alir penelitian............................................................................. 28
Gambar 8 Sistem poros rotor sederhana ............................................................... 29
Gambar 9 Pemodelan elemen hingga sistem poros rotor sederhana. .................... 30
Gambar 10 Penyusunan matriks global................................................................. 35
Gambar 11 Diagram Campbell sistem poros rotor sederhana. ............................. 37
Gambar 12 Respon massa tak imbang sistem poros rotor sederhana. .................. 38
Gambar 13 Pemodelan multi rotor dengan 5 elemen. ........................................... 40
Gambar 14 Pemodelan multi rotor dengan 13 elemen .......................................... 40
Gambar 15 Diagram Campbell. ............................................................................ 42
Gambar 16 Diagram Campbell referensi .............................................................. 42
Gambar 17 Respon massa tak imbang = 2. ...................................................... 43
Gambar 18 Respon massa tak imnbang = 2 referensi...................................... 43
Gambar 19 Respon massa tak imbang = 6. ..................................................... 44

v
Gambar 20 Respon massa tak imbang = 6 referensi. ....................................... 44
Gambar 21 Model sistem dual rotor ..................................................................... 47
Gambar 22 Pengglobalan matriks massa sistem dual rotor. ................................. 48
Gambar 23 Pengglobalan matriks kekakuan dan redaman sistem dual rotor. ...... 49
Gambar 24 Pemodelan elemen hingga sistem dual rotor...................................... 50
Gambar 25 Diagram Campbell sistem dual rotor fungsi putaran rotor 1. ............. 53
Gambar 26 Diagram Campbell referensi sistem dual rotor. ................................. 53
Gambar 27 Respon massa tak imbang. ................................................................. 55
Gambar 28 Respon massa tak imbang referensi ................................................... 56
Gambar 29 Model sistem dual rotor 1 dimensi (1D) ............................................ 57
Gambar 30 Pemodelan sistem dual rotor 3 dimensi (3D) ..................................... 58
Gambar 31 Pemodelan elemen hingga 1 dimensi (1D) ........................................ 59
Gambar 32 Diagram Campbell sistem dual rotor referensi. ................................. 60
Gambar 33 Diagram Campbell sistem dual rotor hasil program komputasi. ....... 61
Gambar 34 Prediksi respon massa tak imbang pada disk 1 referensi ................... 64
Gambar 35 Prediksi respon massa tak imbang pada disk 1. ................................. 64
Gambar 36 Prediksi respon massa tak imbang pada disk 4 referensi ................... 65
Gambar 37 Prediksi respon massa tak imbang pada disk 4. ................................. 65
vi
DAFTAR TABEL
Tabel 1 Kecepatan kritis sistem poros rotor sederhana. ........................................ 39
Tabel 2 Data geometri rotor. ................................................................................. 40
Tabel 3 Perbandingan frekuensi pribadi (13 elemen) ........................................... 45
Tabel 4 Perbandingan frekuensi pribadi (5 elemen). ............................................ 46
Tabel 5 Dimensi penampang poros sistem dual rotor ........................................... 51
Tabel 6 Data disk sistem dual rotor ...................................................................... 51
Tabel 7 Karakteristik bantalan sistem dual rotor .................................................. 51
Tabel 8 Koordinat nodal pada poros dalam .......................................................... 52
Tabel 9 Koordinat nodal pada poros luar .............................................................. 52
Tabel 10 Perbandingan hasil perhitungan komputasi dan referensi ..................... 54
Tabel 11 Perbandingan frekuensi pribadi pada 10.000 rpm ................................. 54
Tabel 12 Data geometri poros ............................................................................... 58
Tabel 13 Karakteristik bantalan dan seals ............................................................ 58
Tabel 14 Data geometri disk. ................................................................................ 59
Tabel 15 Data properti material disk ..................................................................... 59
Tabel 16 Perbandingan data frekuensi pribadi ...................................................... 61
Tabel 17 Perbandingan data kecepatan putaran kritis ........................................... 62
Tabel 18 Koordinant nodal sistem rotor dalam. .................................................... 63
Tabel 19 Koordinant nodal sistem rotor luar. ....................................................... 63
Tabel 20 Perbandingan penggunaan waktu CPU terhadap studi kasus. ............... 66

vii
DAFTAR SIMBOL
Persamaan matriks efek giroskopik
Redaman bantalan dan seals arah ( ⁄⁄ )
Redaman bantalan dan seals arah ( ⁄⁄ )
Redaman bantalan dan seals arah ( ⁄⁄ )
Redaman bantalan dan seals arah ( ⁄⁄ )
Diameter ()
Jarak massa unbalance pada disk ()
Modulus elastisitas ( )
Gaya aksial poros ()
Modulus geser ( )
Moemen inersia penampang poros ()
Momen inersia disk arah sumbu ( )
Momen inersia disk arah sumbu ( )
Persamaan matriks kekakuan klasik
Persamaan matriks gaya aksial
Kekauan bantalan dan seals arah
Kekauan bantalan dan seals arah
Kekauan bantalan dan seals arah
viii
Kekauan bantalan dan seals arah
Panjang ()
Persamaan matriks massa poros
Persamaan matriks disk
Massa disk ()
Persamaan matriks inersia poros
Massa unbalance ()
Fungsi bentuk perpindahan poros akibat beban bending
Jari-jari poros ()
Luas penampang poros ()
Energi kinetik disk ()
Energi regangan poros ()
Defleksi terhadap sumbu
Poisson ratio
Defleksi terhadap sumbu
Efek geser poros
Posisi sudut massa unbalance (°)
δ Korrdinat derajat kebebasan
Ω Kecepatan putar system ()
Defleksi sudut terhadap sumbu
Defleksi sudut terhadap sumbu
Massa jenis
[] Persamaan matriks massa global sistem

ix
[] Persamaan matriks redaman global sistem
[] Persamaan matriks kekakuan global sistem
[∗] Persamaan matriks kekakuan global sistem, dimana nilai dan
diabaikan
I. PENDAHULUAN
1.1 Latar Belakang
Mesin-mesin industri saat ini terus mengalami perkembangan yang sangat
signifikan. Salah satu mesin yang banyak digunakan di dalam keperluan industri
adalah mesin-mesin rotasi atau mesin berputar. Mesin-mesin rotasi ini sangat erat
hubungannya dengan sistem poros rotor. Penggunaan sistem poros rotor dalam
dunia industri diantaranya digunakan pada kompresor uap, kompresor sentrifugal
tekanan rendah dan tinggi, turbin gas, dan mesin pesawat (Lalanne, 1990). Fungsi
utama poros pada sistem poros rotor adalah mentransmisikan daya melalui putaran.
Sistem poros rotor tersusun atas elemen-elemen utama yaitu; rotor (disk), poros
(shaft), bantalan (bearing) dan seals yang mempunyai sifat mekanik yang berbeda-
beda.
Pada saat sistem poros rotor beroperasi, elemen-elemen utama sistem poros rotor
akan menimbulkan beban dinamik seperti bending, torsi dan momen. Hal ini
menimbulkan karakteristik dinamik yang terjadi pada sistem poros rotor.
Karakteristik sistem rotor umumnya dipengaruhi oleh piringan, poros, bantalan dan
seal (bearing and seals). Karakteristik dinamik pada sistem poros rotor

2
berhubungan erat dengan putaran dari sistem poros rotor. Karakteristik sistem poros
rotor ini sangat penting untuk diketahui, agar dalam merancang dan
mengoperasikannya dapat diperhitungkan secara tepat untuk menghindari
kegagalan pada sistem.
Salah satu karakteristik dinamik yang penting untuk diketahui adalah frekuensi
pribadi. Frekuensi pribadi sistem poros rotor ini dipengaruhi oleh elemen-elemen
yang digunakan dalam sistem poros rotor dan dinyatakan dalam fungsi kecepatan
( ) yang diplot dalam diagram Campbell. Karakteristik dinamiknya dapat
ditentukan dengan menyatakan setiap elemen dalam persamaan energi kinetiknya.
Selain menggunakan persamaan energi kinetik terdapat juga metode elemen hingga
untuk mendapatkan karakteristik dinamiknya.
Sistem poros rotor akan beroperasi dengan baik jika tidak berputar di dekat daerah
frekuensi pribadinya (putaran kritis), karena jika sistem poros rotor beroperasi
dekat dengan frekuensi pribadinya (putaran kritisnya) maka akan menimbulkan
resonansi. Resonansi ditandai dengan semakin besarnya amplitudo dan dapat
menyebabkan kegagalan pada sistem poros rotor. Sistem poros rotor memiliki
berbagai putaran kritis yang dapat dilihat dari diagram Cambpell. Putaran kritis ini
akan memberikan informasi tentang batas rentang kecepatan putar dalam
pengoperasian sistem poros rotor. Banyaknya putaran kritis poros ini dipengaruhi
oleh jumlah derajat kebebasan (degree of freedom) yang diamati pada sistem poros
rotor tersebut. Oleh karena itu dalam merancang suatu sistem poros rotor maka
3
karakteristik dinamiknya harus dipahami, agar dapat diketahui kecepatan putar
yang aman pada sistem poros rotor.
Sistem poros rotor yang digunakan pada kebanyakan industri saat ini adalah sistem
poros rotor bertingkat atau dual rotor. Dalam mengalisa karakteristik dinamik
terdapat beberapa metode yang digunakan. Metode Jeffcot rotor dapat digunakan
untuk memodelkan sistem poros rotor (Adams, 1980). Metode elemen hingga
merupakan salah satu metode yang digunakan untuk mendapatkan karakteristik
dinamik sistem poros rotor (Nelson, 1980). Penyelesaian persamaan gerak sistem
poros rotor yang didapatkan dari pemodelan elemen hingga dapat diselesaikan
dengan metode pseudo modal dan metode langsung (direct) (Lalanne, 1990).
Metode penggabungan antara elemen hingga, metoda matrik transfer, metoda
integrasi numerik deret waktu dan metoda Hubolt untuk pemodelan sistem poros
rotor agar didapatkan waktu komputasi dan numerik yang lebih cepat (Huang,
2001). Fei pada tahun 2013 telah melakukan investigasi karakteristik dinamik
sistem poros rotor bertingkat yang disimulasikan berdasarkan metode elemen
hingga dan memperoleh hasil bahwa dengan menggunakan metode elemen hingga
dapat memprediksi karakteristik dinamik sistem poros rotor bertingkat. Hasil
pengujian yang didapatkan berupa kecepatan putaran kritis, perpindahan transient,
dan diagram trajectory. Yanto pada tahun 2014 telah melakukan analisis perilaku
dinamik pada sistem poros rotor 3D, dan didapatkan variasi putaran kritis sebanyak
192 frekuensi pribadi. Pola getar yang ditunjukkan terdapat 96 searah dengan
putaran (maju) dan 96 berlawanan arah dengan putaran (mundur).
4
Berdasarkan latar belakang yang sudah dijabarkan, maka penulis tertarik untuk
mengkaji karakteristik dinamik sisttem poros rotor bertingkat secara analitik dan
numerik dengan menyusun program dalam bahasa pemrograman teknik yakni
software MATLAB (R2015a). Kaji analitik dan numerik ini dilakukan untuk
mendapatkan karakteristik dinamik dari sistem poros rotor bertingkat seperti
putaran kritis dan respon massa tak imbang (mass unbalance response). Pada
penelitian ini digunakan pemodelan elemen hingga dan metode pseudo modal agar
diperoleh putaran kritis, dan respon massa tak imbang (mass unbalance response).
1.2 Batasan Masalah
Batasan masalah pada penelitian ini adalah:
1. Sistem poros rotor yang dianalisis merupakan sistem poros rotor linear
monorotor dan bertingkat (dual rotor).
2. Kaji analitik dilakukan untuk sistem poros rotor sederhana dengan 2 elemen.
3. Pemodelan sistem dengan elemen hingga untuk mendapatkan persamaan
geraknya dan menerapkan metode pseudo modal untuk mendapatkan
karakteristik dinamik berupa frekuensi pribadi.
4. Karakteristik dinamik yang dikaji adalah kecepatan putaran kritis dan respon
massa tak imbang.
5. Sistem poros rotor diasumsikan hanya dipengaruhi oleh eksitasi massa tak
imbang pada rotor, sehingga momen torsi yang ditimbulkan oleh putaran poros
diabaikan.
5
1.3 Tujuan
Adapun tujuan yang ingin didapatkan dari tugas akhir ini adalah:
1. Memahami karakteristik dinamik dalam hal ini hanya kecepatan putaran kritis
sistem poros rotor bertingkat secara teoritik maupun numerik melalui program
komputasi.
2. Mendapatkan program komputasi yang bisa digunakan untuk mengetahui
karakteristik dinamik pada sistem poros rotor bertingkat.
3. Mendapatkan perbandingan waktu komputasi program yang sudah disusun
terhadap studi kasus dari beberapa referensi.
1.4 Sistematika Penulisan
Penyusunan laporan tugas akhir ini terdiri atas 5 Bab. Bab I Pendahuluan yang
berisikan penjelasan tentang latar belakang masalah, tujuan dan manfaat, batasan
masalah serta sistematika penulisan laporan tugas akhir. Bab II merupkan Tinjauan
Pustaka, yang berisikan tentang teori-teori dasar yang berhubungan dengan topik
tugas akhir ini serta mendukung pembahasan pada Bab IV. Bab III Metode
Penelitian yang berisikan tentang bagaimana proses perancangan, proses
perhitungan karakteristik dinamik dari sistem poros dan metode yang digunakan.
Hasil dan Pembahasan, disajikan pada Bab IV, pada bagian ini berisikan tentang
hasil serta pembahasan rancangan dan karakteristik sistem poros rotor bertingkat
yang didapatkan. Pada bagian akhir terdapat Bab V Simpulan dan Saran, pada bab

6
ini berisikan simpulan dan hasil pembahasan yang didapatkan serta saran yang
dapat diberikan oleh penulis untuk penelitian lebih lanjut. Selanjutnya Daftar
Kepustakaan, dimana pada bagian ini berisikan tentang sumber-sumber
kepustakaan yang digunakan, dan terakhir terdapat Lampiran berisikan tentang
data-data yang mendukung dalam penulisan laporan akhir ini.
II. TINJAUAN PUSTAKA
2.1 Sistem Poros Rotor
Komponen utama sistem poros rotor terdiri atas poros, rotor (disk), bantalan dan
seal. Banyak industri yang menerapkan sistem poros rotor yang fleksibel, dimana
poros dirancang untuk penggunaan dalam jangka waktu yang panjang, mempunyai
ukuran yang bergeometri dengan tingkat ketelitian yang tinggi untuk
memaksimalkan ruang yang tersedia untuk komponen-komponen yang lain seperti
impeller dan seal. Selain itu, dapat dioperasikan pada mesin yang berputar pada
kecepatan tinggi dengan tujuan untuk memaksimalkan daya.
Sistem poros rotor memiliki beberapa kecepatan putar kritis, yang ditentukan oleh
karakteristik dari elemen-elemen yang ada pada sistem poros rotor. Elemen-elemen
ini akan dihitung menggunakan persamaan energi kinetik, serta untuk poros
digunakan persamaan energi regangan.
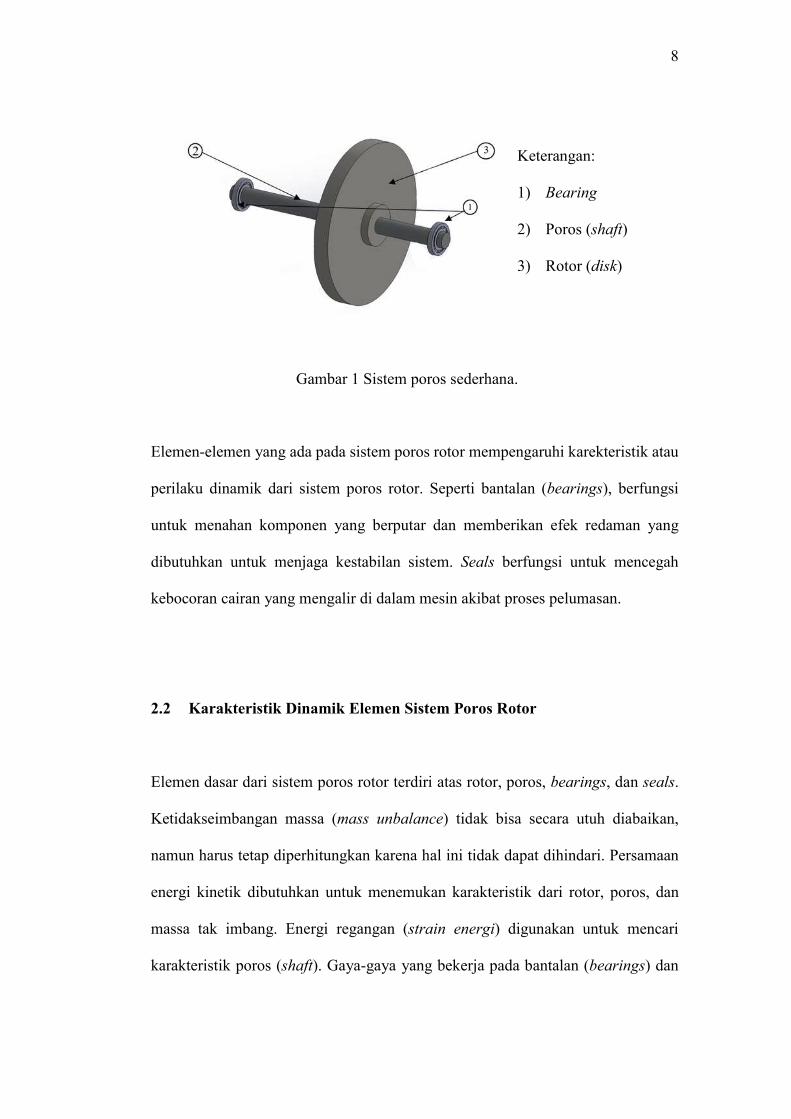
Sistem poros rotor sederhana dijelaskan pada Gambar 1 berikut, dimana pada
Gambar 1 terdapat elemen-elemen yang ada pada dasar sistem poros rotor.
8
Elemen-elemen yang ada pada sistem poros rotor mempengaruhi karekteristik atau
perilaku dinamik dari sistem poros rotor. Seperti bantalan (bearings), berfungsi
untuk menahan komponen yang berputar dan memberikan efek redaman yang
dibutuhkan untuk menjaga kestabilan sistem. Seals berfungsi untuk mencegah
kebocoran cairan yang mengalir di dalam mesin akibat proses pelumasan.
2.2 Karakteristik Dinamik Elemen Sistem Poros Rotor
Elemen dasar dari sistem poros rotor terdiri atas rotor, poros, bearings, dan seals.
Ketidakseimbangan massa (mass unbalance) tidak bisa secara utuh diabaikan,
namun harus tetap diperhitungkan karena hal ini tidak dapat dihindari. Persamaan
energi kinetik dibutuhkan untuk menemukan karakteristik dari rotor, poros, dan
massa tak imbang. Energi regangan (strain energi) digunakan untuk mencari
karakteristik poros (shaft). Gaya-gaya yang bekerja pada bantalan (bearings) dan
Gambar 1 Sistem poros sederhana.
Keterangan:
1) Bearing
2) Poros (shaft)
3) Rotor (disk)
9
seals digunakan untuk mencari kerja semu (virtual work), sehingga adanya
hubungan gaya yang bekerja pada poros.
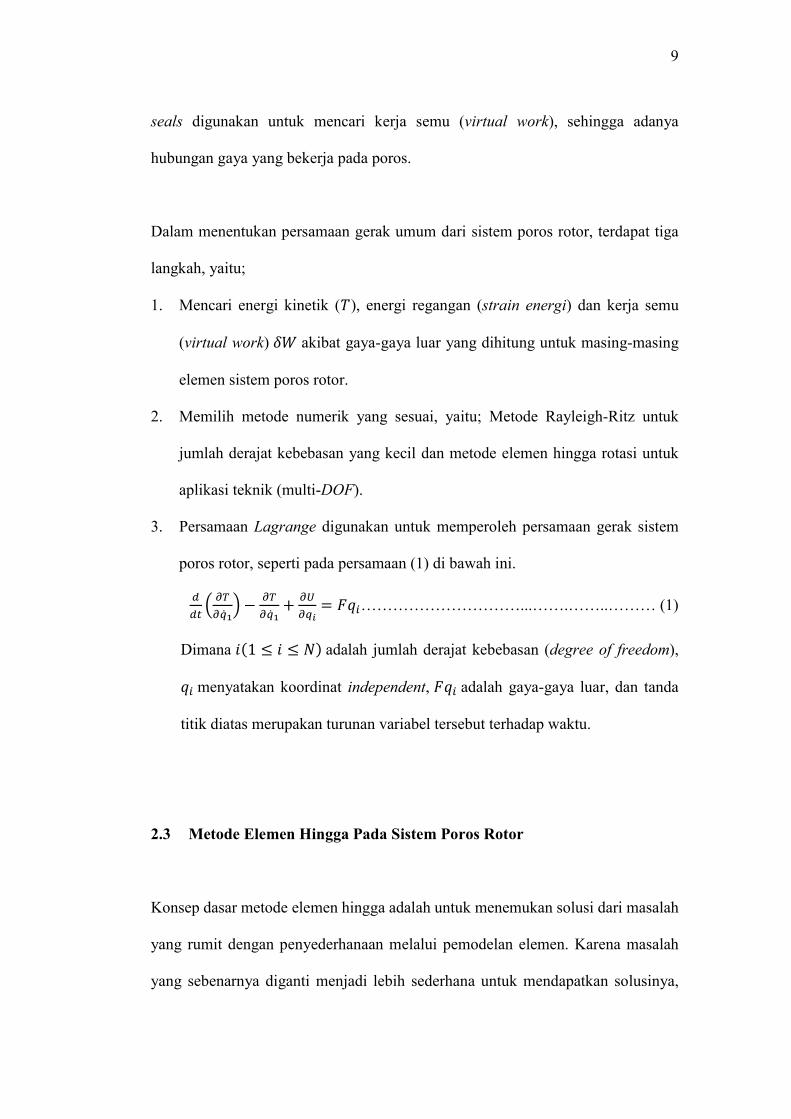
Dalam menentukan persamaan gerak umum dari sistem poros rotor, terdapat tiga
langkah, yaitu;
1. Mencari energi kinetik (), energi regangan (strain energi) dan kerja semu
(virtual work) akibat gaya-gaya luar yang dihitung untuk masing-masing
elemen sistem poros rotor.
2. Memilih metode numerik yang sesuai, yaitu; Metode Rayleigh-Ritz untuk
jumlah derajat kebebasan yang kecil dan metode elemen hingga rotasi untuk
aplikasi teknik (multi-DOF).
3. Persamaan Lagrange digunakan untuk memperoleh persamaan gerak sistem
poros rotor, seperti pada persamaan (1) di bawah ini.
−
+
= …………………………...…….……..……… (1)
Dimana (1 ≤ ≤ ) adalah jumlah derajat kebebasan (degree of freedom),
menyatakan koordinat independent, adalah gaya-gaya luar, dan tanda
titik diatas merupakan turunan variabel tersebut terhadap waktu.
2.3 Metode Elemen Hingga Pada Sistem Poros Rotor
Konsep dasar metode elemen hingga adalah untuk menemukan solusi dari masalah
yang rumit dengan penyederhanaan melalui pemodelan elemen. Karena masalah
yang sebenarnya diganti menjadi lebih sederhana untuk mendapatkan solusinya,
10
maka hanya akan diperoleh solusi yang mendekati hasil aktualnya. Masalah yang
kompleks tadi secara teori akan dibagi menjadi bagian-bagian yang kecil sehingga
dinamakan elemen. Elemen-elemen yang sudah dibagi tadi dianggap terpisah satu
sama lain dan dapat diasumsikan dihubungkan dengan titik-titik yang dinamakan
titik simpul (nodal), sehingga membentuk suatu jaringan. Semakin banyak elemen-
elemen yang ada dan ukurannya yang kecil maka hasil yang diperoleh akan semakin
mendekati hasil aktualnya (Rao, 2011).
Metode elemen hingga umumnya diterapkan pada analisis struktur yang kompleks
dan struktur mekanik tak berputar. Metode elemen hingga juga dapat diterapkan
pada sistem poros rotor dengan prosedur yang sama dengan metode elemen hingga
pada analisis struktur. Pada sistem poros rotor, struktur yang ada merupakan sistem
kontinum berputar sehingga penurunan matriks dan persamaan elemen didapatkan
dengan metode elemen hingga rotasi. Setiap elemen yang ada pada sistem poros
rotor (shaft, disk, bearing dan seal) mempunyai persamaan elemen hingga yang
berbeda-beda. Setiap persamaan dan matriks yang didapatkan akan digabungkan
menggunakan persamaan gerak sistem poros rotor untuk mendapatkan karakteristik
dinamiknya.
Sistem poros rotor akan dibagi menjadi beberapa elemen yang akan dihubungkan
oleh nodal, setiap nodal diasumsikan mempunyai empat derajat kebebasan yaitu
dua defleksi dan , dan dua defleksi sudut terhadap sumbu dan , masing-
masing adalah dan . Defleksi atau perpindahan nodal dapat dinyatakan sebagai
vektor, persamaan (2) menyatakan vektor perpindahan nodal.

11
= [,,,]……………………………………………...…………. (2)
Berikut ini merupakan persamaan elemen hingga untuk setiap elemen-elemen yang
ada pada sistem poros rotor.
2.3.1 Elemen hingga rotor (disk)
Rotor (disk) diasumsikan kaku dan karakteristiknya sangat dipengaruhi oleh energi
kinetiknya. ( ) adalah inertial frame dan (,,) merupakan koordinat
piringan yang tetap pada disk, seperti yang dijelaskan pada Gambar 2. Koordinat
sistem () berhubungan dengan koordinat sistem melalui tiga sudut yaitu
,, dan ∅.
Energi kinetik disk dinyatakan dalam persamaan (3).
=
+ +
+ +
Ω + 2Ω …............ (3)
Bentuk
I Ω merupakan konstanta energi rotasi disk pada putaran Ω dan tidak
berpengaruh persamaan (3). Sedangkan bentuk Ω , mewakili efek giroskopik
(Coriolis).
Gambar 2 Kerangka acuan disk pada poros fleksibel (Lalanne, 1990).
12
Dengan menerapkan persamaan Lagrange pada persamaan (3) maka diperoleh
persamaan berikut ini.
−
=
0 0 00 0 00 0 00 0 0
+ Ω
⎣⎢⎢⎡0 0 0 00 0 0 00 0 0 −
0 0 0 ⎦⎥⎥⎤
…… (4)
Matriks yang terbentuk dari penerapan persamaan Lagrange menghasilkan 2
persamaan matriks, matriks pertama dan kedua pada persamaan (4) merupakan
matriks massa klasik dan matriks giroskopik (Coriolis).
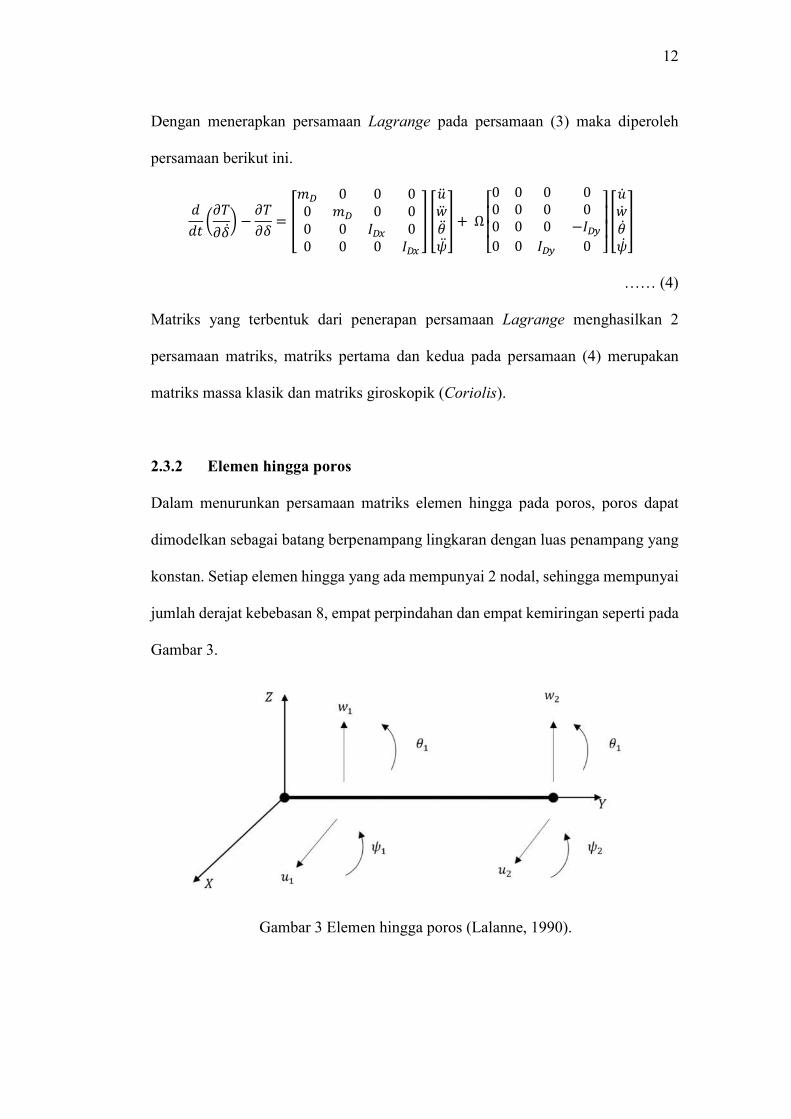
2.3.2 Elemen hingga poros
Dalam menurunkan persamaan matriks elemen hingga pada poros, poros dapat
dimodelkan sebagai batang berpenampang lingkaran dengan luas penampang yang
konstan. Setiap elemen hingga yang ada mempunyai 2 nodal, sehingga mempunyai
jumlah derajat kebebasan 8, empat perpindahan dan empat kemiringan seperti pada
Gambar 3.
Gambar 3 Elemen hingga poros (Lalanne, 1990).

13
Hubungan antara perpindahan dan kemiringan dapat dinyatakan pada persamaan
(5) dan (6).
=
……………………………………………………...… (5)
= −
……………………………………………………… (6)
Sedangkan, vektor perpindahan nodal dinyatakan pada persamaan (7).
= [,,,,,,,] …………………………………..... (7)
Persamaan (7) terdiri atas perpindahan dan , masing-masing perpindahan ini
menyatakan gerak dalam arah dan . Sehingga akan membentuk persamaan (8)
dan (9).
= [,,,] ………………………..………….…….………… (8)
= [,,,] …………………….……………………...……… (9)
Persamaan umum energi kinetik dan energi regangan poros dengan panjang
dijelaskan pada persamaan (10) dan (11).
=
∫ +
+
∫ + + Ω
+ 2Ω …….. (10)
=
∫
+
+
∫
+
……….... (11)
Dengan adalah masa jenis, adalah luas penampang dari beam, I adalah momen
inersia penampang beam, dan adalah modulus elastisitas dan gaya aksial
poros (konstan) dimana nilai S dan I memiliki nilai yang seharusnya konstan.
Untuk mendapatkan persamaan elemen hingga poros dapat diturunkan dengan
langkah-langkah berikut ini.
= () ………………………….…………………………….….. (12)
= () …………………………….…………………………….. (13)

14
Dengan nilai-nilai () dan () adalah fungsi bentuk perpindahan balok
akibat beban bending. Persamaan (14) dan (15) merupakan fungsi () dan
().
() = 1 −
+
;− +
−
;
−
;
−
…………. (14)
() = 1 −
+
; −
+
;
−
;−
+
………… (15)
Energi kinetik dari poros dapat diperoleh dari persamaan (10), dan dapat dinyatakan
dalam bentuk persamaan (16) berikut.
=
∫
+
+
∫
+
− 2Ω ∫ 1
2
0+ Ω 2 ………… (16)
Dengan mensubtitusikan persamaan (14) dan (15) beserta turunannya ke dalam
persamaan (16), dan melakukan integrasi maka akan diperoleh persamaan (17).
=
+
+
+
+
Ω 5 + Ω …………………………...………………….. (17)
Nilai dan adalah matriks massa klasik, dan didapatkan dari efek
inersia putar dan didapatkan dari efek giroskopik. Dengan menerapkan
persamaan Lagrange pada persamaan (17) didapatkan persamaan (18).
−
= ( + ) + ………………………………….… (18)
Nilai dan didapatkan dari , dan , dan matriks dari .
Matriks-matriks tersebut adalah

15
=
⎣⎢⎢⎢⎢⎢⎢⎡
156 0 0 − 22 54 0 0 130 156 22 0 0 54 − 13 00 22 4 0 0 13 − 3 0
− 22 0 0 4 − 13 0 0 − 3
54 0 0 − 13 156 0 0 220 54 13 0 0 156 − 22 00 − 13 − 3 0 0 − 22 4 0
13 0 0 − 3 22 0 0 4 ⎦⎥⎥⎥⎥⎥⎥⎤
... (19)
=
⎣⎢⎢⎢⎢⎢⎢⎡
36 0 0 − 3 − 36 0 0 − 30 36 3 0 0 − 36 3 00 3 4 0 0 − 3 − 0
− 3 0 0 4 3 0 0 −
− 36 0 0 3 36 0 0 30 − 36 − 3 0 0 36 − 3 00 3 − 0 0 − 3 4 0
− 3 0 0 3 0 0 4 ⎦⎥⎥⎥⎥⎥⎥⎤
........ (20)
=
⎣⎢⎢⎢⎢⎢⎢⎡
0 − 36 − 3 0 0 36 − 3 036 0 0 − 3 − 36 0 0 − 33 0 0 − 4 − 3 0 0
0 3 4 0 0 − 3 00 36 3 0 0 − 36 3 0
− 36 0 0 3 36 0 0 33 0 0 − 3 0 0 − 4
0 3 − 0 0 − 3 4 0 ⎦⎥⎥⎥⎥⎥⎥⎤
..…. (21)
Energi regangan yang ada pada poros dapat diperoleh dari persamaan (11) dan dapat
dinyatakan dalam bentuk persamaan (22) berikut.
=
∫
+
+
∫
+
…………………... (22)
Selanjutnya, dilakukan integrasi pada persamaan (22), sehingga menjadi persamaan
(23) berikut.
=
+
+
+
…………… (23)

16
Dengan nilai dan adalah matriks kekakuan klasik, dan dan merupakan
matriks akibat adanya pengaruh gaya aksial. Efek geser perlu diperhitungkan, efek
geser tersebut dapat dinyatakan sebagai persamaan berikut.
=
……………………..………………………………...……… (24)
Dengan nilai merupakan momen inersia penampang yang didapatkan dari
persamaan (25). Nilai (modulus geser) dapat ditentukan dengan persamaan (26),
sedangkan nilai (modulus elastisitas) didapatkan dari properti material poros
yang digunakan.
=
…………………………………...………….…………………. (25)
=
() ………………………………..……………..……………… (26)
Dengan nilai merupakan poisson’s ratio, dan (≅ ) adalah luas reduksi dari
penampang melintang. Pengaruh yang dihasilkan oleh efek geser dapat
didefinisikan ke dalam matriks . Matriks kekakuan klasik didapatkan dari ,
dan , dan matriks atau matriks gaya aksial diadapatkan dari dan .
Selanjutnya, dengan menerapakan persamaan Lagrange’s pada persamaan (23)
maka diperoleh:
= ……………………………………….……………………….. (27)
dengan
= + ……………………….………………………………………… (28)
Nilai matriks dan dapat dilihat pada persamaan (29) dan (30).

17
=
()
⎣⎢⎢⎢⎢⎢⎢⎢⎡
12 0 0 − 6 − 12 0 0 − 6
0 12 6 0 0 − 12 6 0
0 6 (4 + )2
0 0 − 6 (2 − )2
0
− 6 0 0 (4 + )2
6 0 0 (2 − )2
− 12 0 0 6 12 0 0 6
0 − 12 − 6 0 0 12 − 6 0
0 6 (2 − )2
0 0 − 6 (4 + )2
0
− 6 0 0 (2 − )2
6 0 0 (4 + )2⎦⎥⎥⎥⎥⎥⎥⎥⎤
.. (29)
=
⎣⎢⎢⎢⎢⎢⎢⎡
36 0 0 − 3 − 36 0 0 − 30 36 3 0 0 − 36 3 00 3 4 0 0 − 3 0
− 3 0 0 4 3 0 0 −
− 36 0 0 3 36 0 0 30 − 36 − 3 0 0 36 − 3 00 3 − 0 0 − 3 4 0
− 3 0 0 3 0 0 4 ⎦⎥⎥⎥⎥⎥⎥⎤
…………. (30)
2.3.3 Elemen hingga bantalan (bearings) dan seals
Kekakuan dan redaman viskos diasumsikan sudah diketahui, dan pengaruh
dari bending dapat diabaikan seperti tampak pada Gambar 4.
Gambar 4 Kekakuan dan redaman bearings (Lalanne, 1990).

18
Kerja virtual (virtual work) dari gaya-gaya yang bekerja pada poros dapat
ditulis sebagai berikut:
= − − − − − − −
− ………….…..………...…………………..…………… (31)
atau
= + …………………………………………………………..………… (32)
dimana dan adalah komponen gaya yang nilainya sama. Persamaan matriks
secara langsung didapatkan dari persamaan (31) dan (32), sehingga akan
menghasilkan persamaan (33) dan (34).
= − − − − …………………………………. (33)
= − − − − …………………………………. (34)
Dengan nilai = = 0 , maka diperoleh persamaan matriks kekakuan
redamannya dapat dilihat pada persamaan (35). Persamaan matriksnya adalah:
= −
0 00 0 0 0
0 00 0 0 0
−
0 00 0 0 0
0 00 0 0 0
…………. (35)
Matriks pertama pada persamaan (35) merupakan matriks kekakuan dan matriks
kedua merupakan matriks redaman viskos. Pada dasarnya matriks-matriks tersebut
merupakan matriks yang asimetris dengan nilai ≠ dan ≠ dan
kondisi matriks dapat bervariasi secara signifikan sebagai fungsi kecepatan rotasi.
2.3.4 Elemen hingga massa tak imbang
Ketidakseimbangan pada sistem poros rotor didefinisikan sebagai massa mu yang
terletak pada jarak d dari pusat geometri poros seperti pada Gambar 5.

19
Persamaan umum energi kinetik dari massa tak imbang dinyatakan pada persamaan
(36) dan pengaplikasian persamaan Lagrange’s pada persamaan (36) maka akan
mendapatkan persamaan (37).
≈ Ω ( cos Ω − sin Ω ) …………………………………...….. (36)
−
= − Ω
sin Ω cos Ω
…..…………………………...….… (37)
Dengan vektor perpindahan
= [,] …………………………………...…………….………….. (38)
Persamaan (37) menunjukkan bahwa massa tak imbang berada pada sumbu pada
saat = 0 . Ketika pada suatu industri rotor, pengaruh dari massa tak imbang
berlangsung secara simultan dan perlu mendapat perhatian khusus. Ketika posisi
massa tak imbang pada = 0 dan posisi sudut terhadap sumbu , maka
persamaan gaya menjadi
= Ω
sin(Ω t+ α)cos(Ω t+ )
………………………………...……….. (39)
Gambar 5 Massa tak imbang (Lalanne, 1990).
20
Persamaan (39) dapat ditulis dalam bentuk persamaan (40) berikut.
= sin Ω + cos Ω …………………………….……………. (40)
Fungsi dan dapat dinyatakan dalam bentuk persamaan (41) dan (42).
= Ω cos
− sin …………………………………………….…… (41)
= Ω sin cos
…………………………………………………… (42)
2.4 Persamaan Gerak Sistem Poros Rotor
Secara umum persamaan gerak sistem poros rotor dapat dituliskan pada persamaan
(43).
[] + [] + [] = () ……………………………………...…… (43)
Pada persamaan (43) merupakan matriks massa (inersia) [], merupakan
matriks redaman [] dan matriks kekauan []. Penyelesaian persamaan (43)
akan didapatkan frekuensi pribadi sistem poros rotor sebagai fungsi kecepatan rotor
yang disebut diagram Campbell. Kecepatan putar kritis dapat dilihat juga pada
diagram Campbell, respon akibat eksitasi massa tak imbang, ketidak sejajaran poros
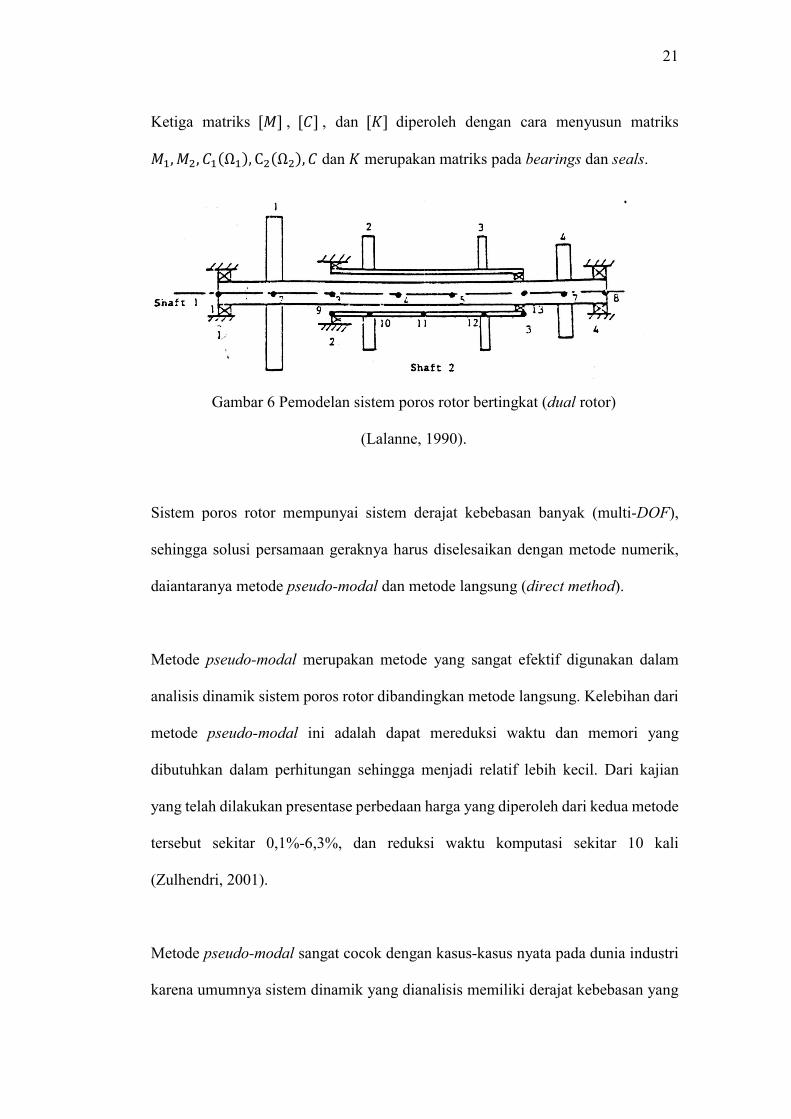
dan lain-lain. Untuk sistem poros rotor bertingkat seperti terlihat pada Gambar 6,
persamaan geraknya dapat dilihat pada persamaan berikut.
[] + [](Ω ,Ω ) + [] = () ……………………..………...… (44)
21
Ketiga matriks [], [], dan [] diperoleh dengan cara menyusun matriks
,,(Ω ),C(Ω ), dan merupakan matriks pada bearings dan seals.
Sistem poros rotor mempunyai sistem derajat kebebasan banyak (multi-DOF),
sehingga solusi persamaan geraknya harus diselesaikan dengan metode numerik,
daiantaranya metode pseudo-modal dan metode langsung (direct method).
Metode pseudo-modal merupakan metode yang sangat efektif digunakan dalam
analisis dinamik sistem poros rotor dibandingkan metode langsung. Kelebihan dari
metode pseudo-modal ini adalah dapat mereduksi waktu dan memori yang
dibutuhkan dalam perhitungan sehingga menjadi relatif lebih kecil. Dari kajian
yang telah dilakukan presentase perbedaan harga yang diperoleh dari kedua metode
tersebut sekitar 0,1%-6,3%, dan reduksi waktu komputasi sekitar 10 kali
(Zulhendri, 2001).
Metode pseudo-modal sangat cocok dengan kasus-kasus nyata pada dunia industri
karena umumnya sistem dinamik yang dianalisis memiliki derajat kebebasan yang
Gambar 6 Pemodelan sistem poros rotor bertingkat (dual rotor)
(Lalanne, 1990).

22
banyak. Dari persamaan (43), nilai redaman rendah maka mekanisme redaman
tidak diketahui dengan jelas dan dengan alasan redaman tersebut tidak terpasang
pada rotor. Sehingga, persamaan (43) dapat didefinisikan sebagai persamaan basis
modal seperti pada persamaan (45) berikut.
+ ∗ = 0 …………..…………………………………….……….. (45)
Degan nilai adalah matriks massa dan ∗ merupakan matrik kekakuan yang
diperoleh dari nilai , dimana nilai dan diabaikan yang ditunjukkan oleh
bearing yang dilepas. (banyak) modus getar terendah pertama ,….. dari
persamaan (44) didapatkan dengan teknik iterasi, dan jika ditulis dalam bentuk
matriks dapat ditulis sebagai persamaan (45) berikut.
= [,… ,] …………………………………..…….……………… (46)
Dari persamaan (47) dapat diperoleh persamaan baru (48).
= ………………………………………….……………………... (47)
Persamaan (47) disubstitusikan ke dalam persaman gerak sistem poros rotor (43)
dan mengalikannya dengan .
+ (Ω ) + = () ……………………..…….. (48)
Diagonal matriks ditambahkan dengan modal damping , yang diperoleh
dari analogi sistem massa pegas teredam SDOF (single-degree-of-freedom).
= 2. ………………………………………………… (49)
Dengan nilai faktor redaman modal diperoleh dari pengalaman perancang.
Sehingga solusi persamaan gerak sistem poros rotor (43) tanpa gaya eksternal dapat
dilihat pada persamaan (50) berikut.
+ (Ω ) + = 0 ………………………...………… (50)
Dengan nilai dapat diasumsikan sebagai persamaan (51) berikut.

23
= …………………………………………….…………………. (51)
Dengan mensubtitusikan persamaan (51) ke dalam persamaan (50) maka
didapatkan persamaan karakteristknya sebagai berikut.
[ + + ] = 0 ………………………………….....……………. (52)
Dengan nilai , dan dapat dilihat pada persamaan (53), (54) dan (55).
= = …………………………………….……. (53)
= = ∗ +
∗∗ ……………………….…… (54)
= = + ………………………………………. (55)
Nilai ∗∗ dapat dilihat pada persamaan (56).
∗∗ = − ∗ ……………………………………………….…………. (56)
Persamaan (52) dapat ditulis dalam bentuk persamaan matriks ke dalam persamaan
(57) sebagai berikut.
0
− −
=
…………………………………..…. (57)
Penyelesaian masalah nilai eigen (eigenvalue) atau frekuensi pribadi dan modus
getar dari persamaan (57) dapat diperoleh dalam besaran yang kompleks.
− /(1 − )
…………………………………………………..… (58)
Dimana merupakan frekuensi pribadi dan merupakan faktor redaman viskos;
jika persamaan (58) > 0, maka sistem tidak stabil. Dari hasil yang diperoleh maka
diagram Campbell dapat digambarkan yang menampilkan daerah-daerah kritis
sehingga kecepatan kritisnya dapat diketahui. Respon massa tak imbang didapatkan
dari persamaan (59) berikut.
+ + = sin Ω + cos Ω ……………………………….. (59)
Dengan nilai dan dapat diperhatikan pada persamaan (60) dan (61) berikut.
= ………………………………………………………...……. (60)

24
= ……………………………………………………………… (61)
Dengan asumsi jawab seperti persamaan (62) berikut.
= sin Ω + cos Ω …………………………………….……….. (62)
Dengan mensubstitusikan persamaan (62) ke dalam persamaan (59) akan diperoleh
persamaan dalam bentuk matriks sebagai berikut.
− Ω − Ω Ω − Ω
=
………………………………….… (63)
Penyelesaian persamaan (63) dan dari persamaan (47) diperoleh vektor perpindahan
sebagai berikut.
= (Ω ) sin Ω + (Ω ) sin Ω ………………………………….. (64)

III. METODE PENELITIAN
Dalam mencapai tujuan penelitian ada langkah-langkah yang harus dilakukan,
seperti yang diperlihatkan pada diagram alir penelitian pada Gambar 7. Langkah-
langkah pada diagram alir penelitian adalah sebagai berikut.
3.1 Studi Literatur dan Pengumpulan Data
Pada tahap ini pengumpulan data merupakan tahap awal dalam penelitian ini,
karena metode yang digunakan pada penelitian ini untuk mendapatkan data adalah
studi literatur. Dalam tahap ini data-data yang diambil berupa bahan referensi dari
beberapa jurnal yang sudah ada yang berkaitan dengan karakteristik dinamik sistem
poros rotor.
3.2 Kaji Analitik
Pada tahap ini hal yang dilakukan adalah mengkaji teori-teori tentang karakteristik
dinamik dari setiap elemen-elemen sistem poros rotor dengan cara mempelajari
dasar-dasar teori yang mendukung dalam penyelesaian penelitian ini. Teori-teori

26
yang ada berguna untuk menurunkan dan mendapatkan persaman-persamaan yang
berhubungan dengan karakteristik dinamik dari sistem poros rotor, sehingga
didapatkan persamaan gerak sistem poros rotor bertingkat. Pada kaji analitik ini
sistem poros yang dikaji merupakan sistem poros sederhana dengan membaginya
menjadi beberapa elemen saja. Hasilnya akan dibandingkan dengan sistem poros
rotor sederhana yang diuji menggunakan program.
3.3 Penyusunan Program
Sistem poros rotor merupakan salah satu aplikasi getaran mekanis dengan jumlah
derajat kebebasan banyak (M-DOF). Jika suatu sistem mempunyai jumlah derajat
kebebasan banyak, maka persamaan geraknya akan semakin kompleks.
Perhitungan manual akan sangat panjang dan rumit, oleh karena itu bantuan bahasa
pemrograman sangat dibutuhkan untuk mendapatkan frekuensi pribadinya. Pada
penelitian ini bahasa pemrogram yang digunakan adalah bahasa komputasi teknik
Matlab. Bahasa komputasi teknik Matlab yang akan disusun merupakan
penyempurnaan program sistem poros single rotor yang telah disusun oleh
Zulhendri (2001) dan Ismail (2004).

27
3.4 Pengujian Program Sistem Poros Rotor
Ketika pembuatan program sudah selesai, data-data yang sudah diperoleh
dimasukkan ke dalam program. Hasil penelitian tersebut dianalisis sehingga
diperoleh suatu kesimpulan. Pemodelan digunakan untuk memvalidasi hasil yang
didapatkan dari MATLAB. Hasil analisis yang dibandingkan adalah frekuensi
pribadinya dan respon massa tak imbang (mass unbalance).
28
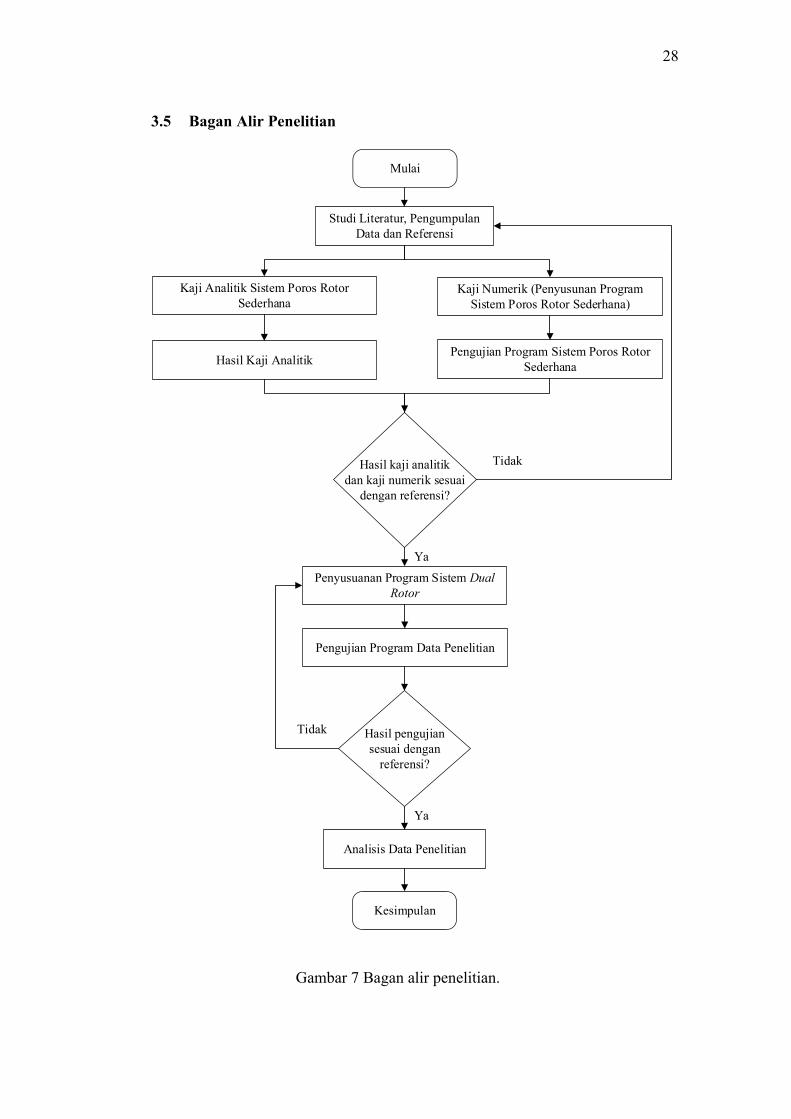
3.5 Bagan Alir Penelitian
Mulai
Kaji Analitik Sistem Poros Rotor Sederhana
Kaji Numerik (Penyusunan Program Sistem Poros Rotor Sederhana)
Pengujian Program Sistem Poros Rotor Sederhana
Hasil Kaji Analitik
Hasil kaji analitik dan kaji numerik sesuai
dengan referensi?
Penyusuanan Program Sistem Dual Rotor
Pengujian Program Data Penelitian
Hasil pengujiansesuai dengan
referensi?
Analisis Data Penelitian
Kesimpulan
Studi Literatur, Pengumpulan Data dan Referensi
Tidak
Tidak
Ya
Ya
Gambar 7 Bagan alir penelitian.
V. KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari simulasi program dan pembahasan yang sudah dilakukan pada bab
sebelumnya, dapat disimpulkan bahwa:
1. Penyusunan matriks lokal sistem monorotor dan dual rotor sama, hanya
terdapat perbedaan ketika menyusun matriks global sistem dual rotor yang
dipengaruhi oleh bantalan antar poros (intershaft bearing).
2. Kaji analitik untuk mengetahui karkateristik dinamik sistem poros hanya bisa
dilakukan untuk jumlah elemen yang kecil, mengingat matriks global yang
dihasilkan berukuran terlalu besar.
3. Karakteristik dinamik sistem poros rotor seperti putaran kritis, dan respon
massa tak imbang merupakan hal yang sangat penting diketahui untuk dapat
memprediksi keadaan sistem pada saat beroperasi.
4. Persentase perbedann harga yang diperoleh antara program komputasi yang
disusun dan harga berdasarkan referensi sekitar 0,11 % - 6,6 % untuk sistem
single rotor, dan 0,15 % - 3,9 % untuk sistem dual rotor. Sedangkan perbedaan
persentase harga terhadap studi kasus model 3D sebesar 0,595% - 4,488%, dan
terhadap studi kasus model 1D sebesar 0,359% - 6,470%.

69
5. Program komputasi yang dibuat mampu menghemat waktu CPU sebesar 2.093
kali untuk mendapatkan diagram Campbell dan untuk mendapatkan respon
massa tak imbang sebesar 205.016,53 kali jika dibandingkan dengan hasil studi
kasus.
6. Program komputasi yang sudah disusun cenderung lebih mendekati dengan
model 3D, sehingga program komputasi yang sudah dibuat mampu mewakili
pemodelan sistem 3D.
7. Program komputasi yang sudah disusun dapat membantu dalam menganalisis
karakteristik dinamik untuk sistem single rotor dan dual rotor.
5.2 Saran
Adapun saran yang dapat diberikan adalah sebagai berikut:
1. Program komputasi yang sudah disusun ini perlu diterapkan untuk berbagai
aplikasi yang banyak ditemukan dalam dunia industri, seperti ketidaksejajaran
(missalligment), atau cacat pada poros.
2. Pengujian secara eksperimental perlu dilakukan untuk memvalidasi hasil yang
didapat secara analitik dan numerik.
3. Pengembangan program komputasi yang sudah ada dapat dikembangkan lagi
dengan memperhitungkan gaya aksial, torsi, dan untuk berbagai gaya
gangguan.
4. Pemodelan lebih lanjut untuk sistem dual rotor, dengan pemodelan yang
berbeda seperti menghubungkan sistem rotor dalam dan rotor luar oleh gear.

DAFTAR KEPUSTAKAAN
Adams, M, 1980, Nonlinear Dynamic of Multibearing Flexible Rotors. Journal
Sound and Vibration, Volume 71(1), 129-144. USA.
Fei, Zhong-xiu, Tong, Shi-guang, and Wei, Chao. 2013. Investistigation of The
Dynamic Characteristic of Dual Rotor System and Its Start-Up Simulation
Based on Finite Element Method. Journal of Zheijang University-SCIENCE
A. China.
Huang, Y. M., and Ching-Ming, W., 2001, Combined Methodology for Analysis of
Rotary System. Journal of Vibration and Acoustic. ASME.
Ismail, 2004, Kaji Numerik Karakteristik Dinamik Sistem Poros-Rotor Mesin
Penggiling (Hammermill) Menggunakan Pemodelan Elemen Hingga.
Skripsi, Universitas Lampung, Bandar Lampung.
Lalanne, M., and Ferraris, G., 1990, Rotordynamics Prediction in Engineering.
John Wiley and Sons Inc., New York.

71
Miao, H., Zang, C., and Friswell, M., 2014, Model Updating and Validation of a
Dual-Rotor System. Proceedings of ISMA Including USD2014, Nanjing
University of Aeronautics and Astronautics, Nanjing, China.
Nelson, H. D., 1980, A Finite Rotating Shaft Element Usisng Timashenko Beam
Theory. Journal of Mechanical Design Volume 102, pp 793-803. ASME.
Rao, S. S., 2011, The Finite Element Method in Engineering Fifth Edition.
Elsevier Inc., USA.
Yanto, A, dan Hidayat, R., 2014, Analisis Perilaku Dinamik Sistem Poros Rotor
3D. Jurnal Teknik Mesin, Volume 4, No.2, Oktober 2014: 75-83.
Zulhendri, H., 2001, Studi Perbandingan Metode Modal Testing Klasik dan Modal
Testing Kompleks Dengan Metode Analitik dalam Identifikasi Arah Whirling
Orbit Sistem Rotor. Tesis Magister, Institut Teknologi Bandung. Bandung.


















