
OAU-Predavanje 2
68
Предавање 2 АЛГЕБРА НА БЛОК ШЕМИ Универзитет „Гоце Делев!"Шти# Еле$троте%ни$и &а$'лтет ПРЕДМЕ() О*НО+И НА А+(ОМА(*КО(О УПРА+У+А,Е учебна 2013-2014 година Предметен наставник Проф. Д-р Сашо Гелев Асистенти: м-р Билјана Читкушева Димитровска М-р Маја Кукушева
-
Upload
debrevanco -
Category
Documents
-
view
219 -
download
0
Transcript of OAU-Predavanje 2

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 1/68
Предавање 2АЛГЕБРА НА БЛОК ШЕМИ
Универзитет „Гоце Делев!"Шти#
Еле$троте%ни$и &а$'лтет
ПРЕДМЕ() О*НО+И НА А+(ОМА(*КО(О УПРА+У+А,Е
учебна 2013-2014 година
Предметен наставник
Проф. Д-р Сашо ГелевАсистенти:
м-р Билјана Читкушева Димитровска
М-р Маја Кукушева

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 2/68
Основи на автоматскоуправување
д-р Сашо Гелев 2
Презентаија на СА! со "лок шеми # основни
с$оеви
Преносната функија %о $оврзува влезот и излезотна некој динами&ки систем 'коло( о"јект) кој
воо"и&аено се $рика*ува %рафи&ки
Преносна функија на динами&ки систем
+а разли&ни ком"инаии на $оврзува,е на $реносни
функии мо*е да се изведат едноставни $равила за
да се до"ие резултантната $реносна функија на
ком"инаијата.
8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 3/68
Основи на автоматскоуправување
д-р Сашо Гелев 3
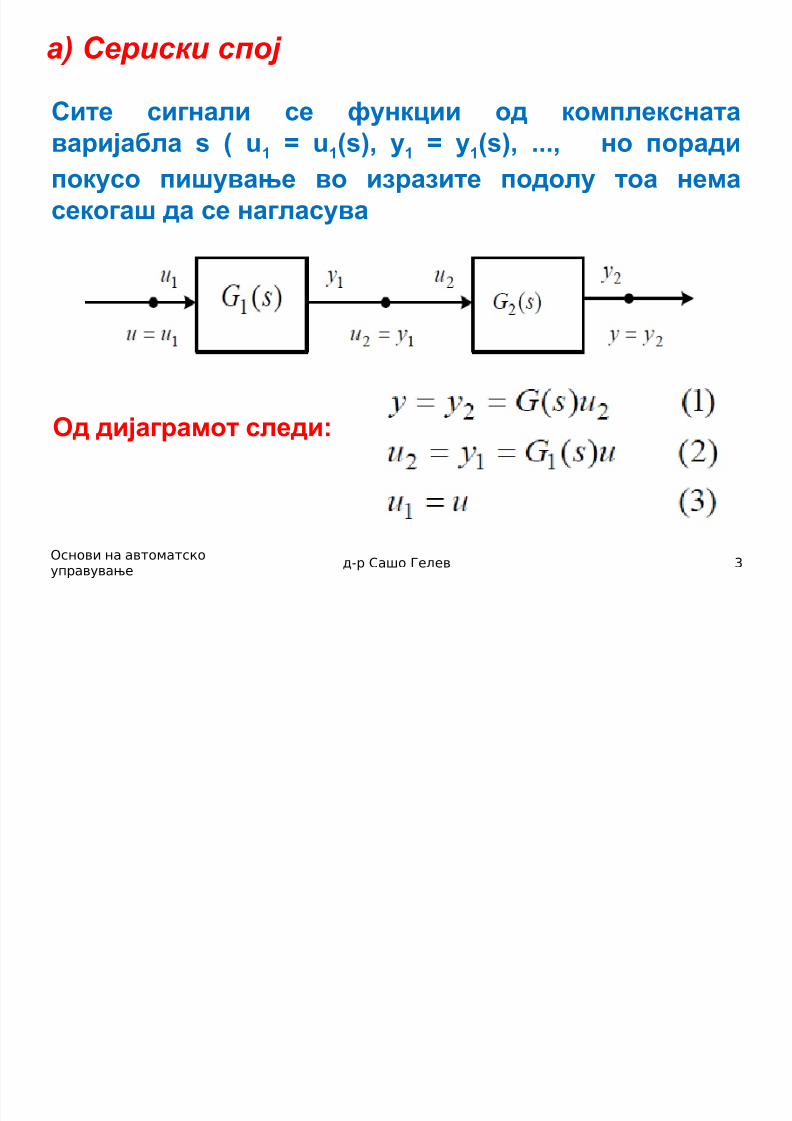
а) Сериски спој
Сите си%нали се функии од ком$лексната
варија"ла ' / 0 /'1)( 2/ 0 2/'1)( ...( но $оради$окусо $ишува,е во изразите $одолу тоа нема
секо%аш да се на%ласува
3д дија%рамот следи:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 4/68
Основи на автоматскоуправување
д-р Сашо Гелев 4
Ако се%а '4) се уврсти во '/) ( 5е се до"ие
од каде следи $реносната функија на с$ојот
При сериското с$ојува,е на $реносни функии
'динами&ки кола) резултантната $реносна
функија се до"ива со мно*е,е на $реносните
функии( како што е $ока*ано

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 5/68
Основи на автоматскоуправување
д-р Сашо Гелев 5
б) Паралелен спој на преносни функции
6а Сл е $рика*ан $аралелен с$ој на $реносни
функии. +а излезите на двете функии '"локови) од
сликата следи:
Сл. 7.7.8 Паралелен с$ој на $реносни функии

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 6/68
Основи на автоматскоуправување
д-р Сашо Гелев 6
9злезот на елиот систем е
3давде за $реносната функија на $аралелната
врска се до"ива:
или:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 7/68
Основи на автоматскоуправување
д-р Сашо Гелев 7
6а Сликата е $рика*ана $аралелна врска на $ове5е
$реносни функии. +а $реносната функија на овој
с$ој вреди релаијата:
Сл. 7.7.. Паралелен с$ој на $ове5е 'n) $реносни
функии

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 8/68
Основи на автоматскоуправување
д-р Сашо Гелев 8
c) Повратна врска
+а овој с$ој од сликата вреди:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 9/68
Основи на автоматскоуправување
д-р Сашо Гелев 9
со уврстува,е на '4) во '/) се до"ива
9ли
а одовде се до"ива изразот
од кој следи $реносната функија на с$ојот со
$овратна врска:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 10/68
Основи на автоматскоуправување
д-р Сашо Гелев 1
Бидејќи излезот на G1(s) се враќа преку
преносната функија G2 (s) на влезот на систе!от
овој спој на преносни функии е наречен повратна
врска.
"реба да се прави разлика по!е#у негативна
повратна врска во која повратниот сигнал y 2 се
додава на влезот со негативен знак и позитивна
повратна врска во која сигналот y 2 се додава навлезот со позитивен знак

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 11/68
Основи на автоматскоуправување
д-р Сашо Гелев 11
Пример 4.2.1.
;о с$еијален слу&ај ко%а G /'s) е &ист засилува& со
високо засилува,е K → ( за системот со не%ативна
$овратна врска се до"ива:
<елоку$ната те=ника на о$ераиони засилува&и се
"азира на овој $рини$.
;о системот со $овратна врска во кој G /'s) е
засилува& со K → елементот G 4 's) во $овратната
%ранка мо*е да се искористи за реализаија на "ило
која $реносна функија во рамките на одредени
о%рани&ува,а.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 12/68
Основи на автоматскоуправување
д-р Сашо Гелев 12
Ал%е"ра на "лок шеми
/) 3сновни ком$оненти:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 13/68
Основи на автоматскоуправување
д-р Сашо Гелев 13
4) 6а&ини на $оврзува,е:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 14/68
Основи на автоматскоуправување
д-р Сашо Гелев 14
7) Повратна врска

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 15/68
Основи на автоматскоуправување
д-р Сашо Гелев 15
8) Блок-дија%рам ал%е"ра:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 16/68
Основи на автоматскоуправување
д-р Сашо Гелев 16
) Сведува,е на едини&на $овратна врска:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 17/68
Основи на автоматскоуправување
д-р Сашо Гелев 17
>) ?едукија на "лок дија%рамите:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 18/68
Основи на автоматскоуправување
д-р Сашо Гелев 18
@) ?едукија на "лок дија%рамите # $родол*ение

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 19/68
Основи на автоматскоуправување
д-р Сашо Гелев 19

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 20/68
Основи на автоматскоуправување
д-р Сашо Гелев 2
A) ?едукија на внатрешните контури:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 21/68
Основи на автоматскоуправување
д-р Сашо Гелев 21
B) Пример /
8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 22/68
Основи на автоматскоуправување
д-р Сашо Гелев 22
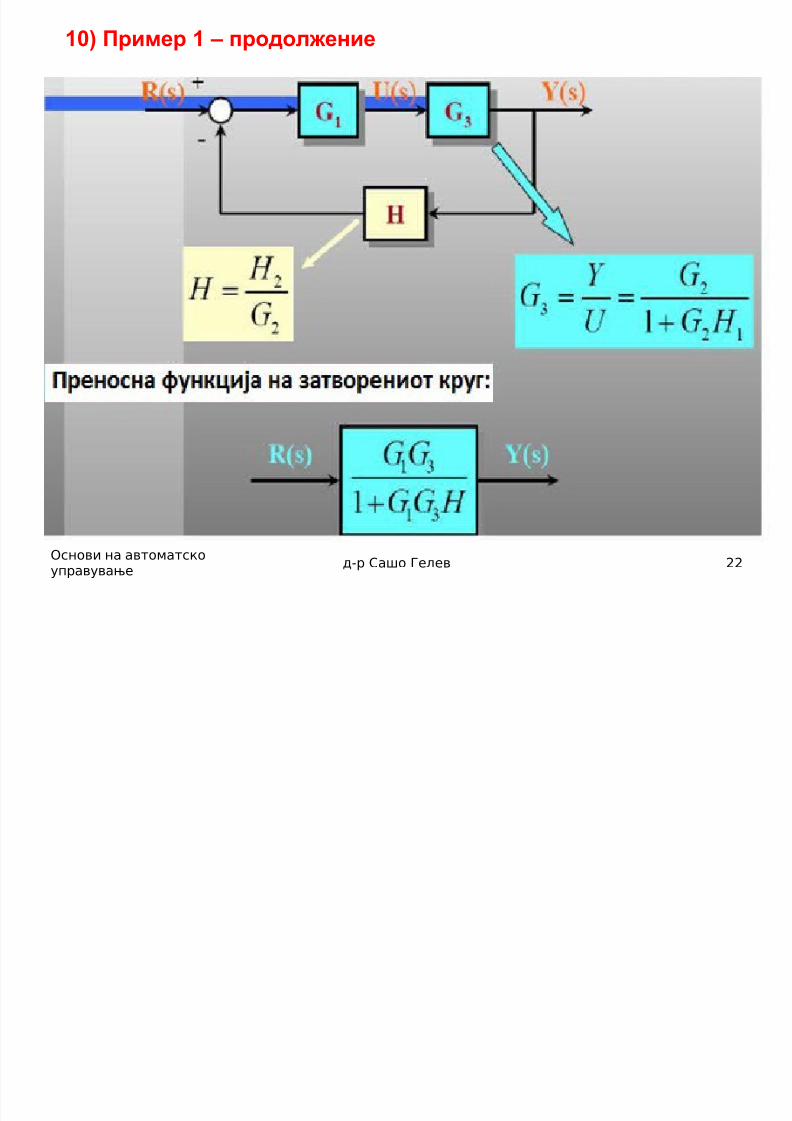
/C) Пример / # $родол*ение

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 23/68
Основи на автоматскоуправување
д-р Сашо Гелев 23
//) Пример 4
/4) П 4 /

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 24/68
Основи на автоматскоуправување
д-р Сашо Гелев 24
/4) Пример 4 # $родол*ение /

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 25/68
Основи на автоматскоуправување
д-р Сашо Гелев 25
/7) Пример 4 # $родол*ение 4

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 26/68
Основи на автоматскоуправување
д-р Сашо Гелев 26
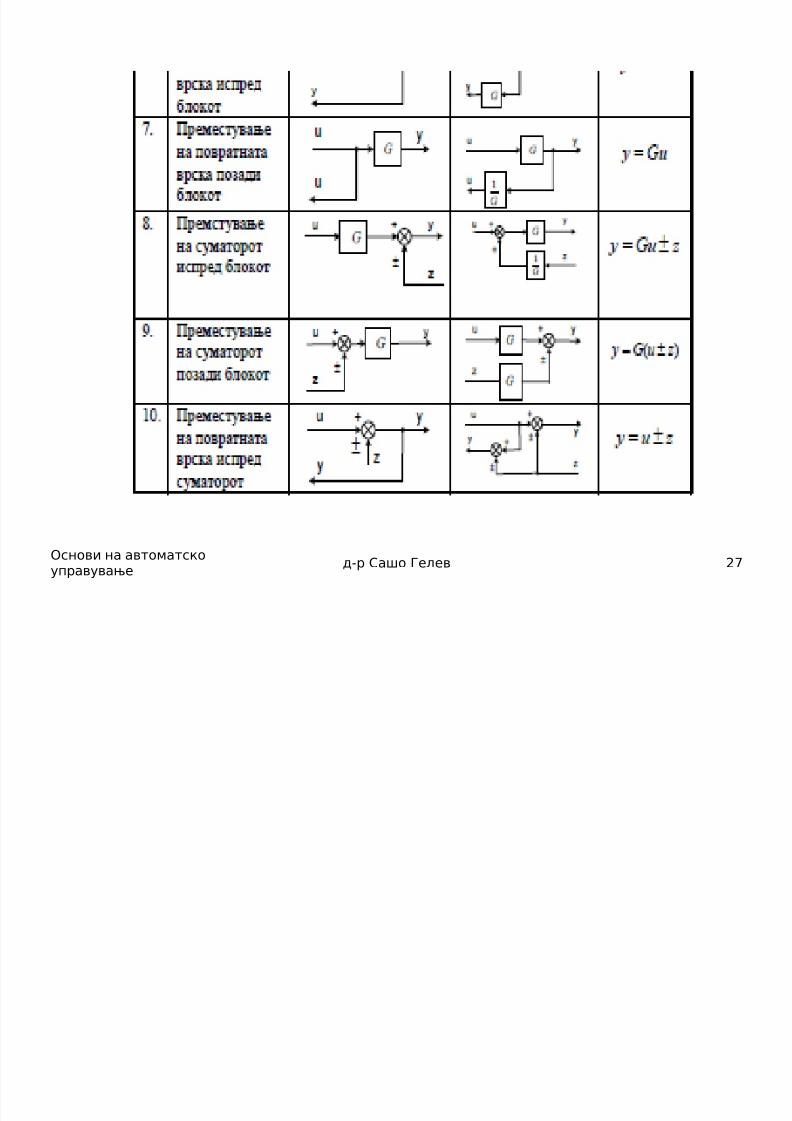
6ајва*ни $равила на ал%е"рата на "лок шеми
8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 27/68
Основи на автоматскоуправување
д-р Сашо Гелев 27

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 28/68
Основи на автоматскоуправување
д-р Сашо Гелев 28

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 29/68
Основи на автоматскоуправување
д-р Сашо Гелев 29
Со $римена на $равилата на ал%е"ра на "лок шеми
да се најде $рDносната функија E'1) на системот
даден на Сл./:
Сл./.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 30/68
Основи на автоматскоуправување
д-р Сашо Гелев 3
?ешение:
Прво јазолот измеFу E4 и E7 %о $реместуваме
$озади "локот E7. Се до"ива Сл.4.
Сл.4

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 31/68
Основи на автоматскоуправување
д-р Сашо Гелев 31
Се%а ја решаваме $овратната врска во која вле%уваат
"локовите E4( E7 и G4. Се до"ива Сл.7.
Сл7.
6а крајот( со решава,е на $овратната врска( ја
до"иваме $реносната фнкија на системот дсадена
во "локот на Сл.8.
Сл8.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 32/68
Основи на автоматскоуправување
д-р Сашо Гелев 32
Пример 4. 'HI1JKL)
Сл./
Даден е "лок дија%рам на СА! со $ове5е контури 'Сл./).
9нтересно е да се $римети дека $овратниот си%нал
G/'1)M'1) е $озитивен $овратен си%нал и затоа контуратаE7'1)E8'1)G/'1) се нарекува позитивна повратна врска.
Потре"но е да се одреди $реносната функија M'1)NO'1)
со $римена на $равилата на ал%е"рата на "лок шеми со
кои $оPдовниот дија%рам мо*е да се редуира.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 33/68
Основи на автоматскоуправување
д-р Сашо Гелев 33
?ешение.
;о $рвиот &екор %о $реместуваме јазолот $омеFу
"локовите E7 и E8 $озади "локот E8 '$равило @ одта"елата). ?езултатот е $рика*ан на Сл.4. $од а).

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 34/68
Основи на автоматскоуправување
д-р Сашо Гелев 34
;о следниот &екор тре"а да се елиминира
$овратната врска E7'1)E8'1)G/'1) која е $озитивна
'$римена на $равилото 4 од та"елата).
?езултатот е $рика*ан на Сл.4.Q)

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 35/68
Основи на автоматскоуправување
д-р Сашо Гелев 35
;о натамошните &екори тре"а да се елиминираат
уште две $овратни врски со $римена на истото
$равило "р. 4 од та"елата. По елиминаијата на
внатрешната не%ативна $овратна врска се до"ива
шемата на Сл.4.с).

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 36/68
Основи на автоматскоуправување
д-р Сашо Гелев 36
;о $оследниот &екор се елиминира $реостанатата
$овратна врска која е не%ативна( а резултатот е
$рика*ан на Сл.4.R).
Бараната $реносна функија на системот е
на$ишана во "локот( односно:
Г?АS 6А TUК3T 6А С9Г6АV9 МUWС363;3

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 37/68
Основи на автоматскоуправување
д-р Сашо Гелев 37
Г?АS 6А TUК3T 6А С9Г6АV9. МUWС363;3
П?А;9V3
Поим за $реносна функија на отворена и на
затворена контура
+а систем &иј структурен "лок дија%рам е
$рика*ан на Сл 8.7./. велиме дека е систем со
едини&на не%ативна $овратна врска.
Сл 8.7./: Структурен "лок дија%рам на систем со едине&на
$овратном с$ре%ом

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 38/68
Основи на автоматскоуправување
д-р Сашо Гелев 38
Си%налот X'Y) се нарекува референтен си%нал( D'Y) е
си%нал на %решка додека 2'Y) излезен си%нал на
системот.
Преносната функија Z'1) која е одредена соколи&никот од Vа$ласовите трансформаии на
си%налот на излезот и си%налот на %решка:
се нарекува $реносна функија на отворената
контура 'во ан%лосаксонската литература се
користи термин KLD[ \KKL YX][1^DX ^[_YIK[).

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 39/68
Основи на автоматскоуправување
д-р Сашо Гелев 39
Преносната функија која е одредена со коли&никот
на Vа$ласовите трансформаии на излезниот и
референтниот си%нал си%нал:
се нарекува $реносна функија на затворената
контура 'во ан%лосаксонската литература се
користи термин _\K1DR \KKL YX][1^DX ^[_YIK[).

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 40/68
Основи на автоматскоуправување
д-р Сашо Гелев 4
6а крајот( &есто е од интерес $реносната функија
која $ока*ува како референтниот си%нал делува на
си%налот на %решка:
3ва $реносна функија на затворената контура $о
си%налот на %решка се нарекува $реносна функијана %решка 'YJD DXXKX YX][1^DX ^[_YIK[).

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 41/68
Основи на автоматскоуправување
д-р Сашо Гелев 41
Да се $отсетиме дека $реносната функија е
дефинирана само за линеарни( временски
инваријантни системи '`ab 121YDc1) и да се
дефинира како коли&ник на Vа$ласовитетрансформаии на си%налите на влезот и на излезот(
$од $рет$оставка дека системот "ил релаксиран(
односно( односно сите $о&етни услови да "иле
еднакви на нула
Сите до се%а ра%ледувани системи "иле системи со
еден влез и со еден излез 'dI[e\D b[LY dI[e\D
fYLY # dbdf) и то%аш е ло%и&но ком$летниот о$исна системот да е даден со една скаларна $реносна
функија.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 42/68
Основи на автоматскоуправување
д-р Сашо Гелев 42
;о слу&ај системот да има $ове5е влезови /'Y)( 4'Y)(
g(X 'Y) и еден излез 2'Y) 'во ан%лосаксонската
литература се користи термин h\YIL\D b[LY dI[e\D
fYLY # hbdf))( системот мора да се о$ише соматриа редиа на $реносните функии:
$ри што &ленот EI'1) %овори за $ридонесот на I-тиот влезен си%нал на излезот на системот.
Математи&ки стро%о %овореј5и( овој &лен мо*е да
се дефинира на следниов на&ин:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 43/68
Основи на автоматскоуправување
д-р Сашо Гелев 43
Со дру%и з"орови( EI'1) &ленот $ретставува
коли&ник на Vа$ласовите трансформаии наизлезот на системот и I-тиот влезен си%нал $од
$рет$оставка сите останати влезни си%нали да се
иденти&ки еднакви на нула.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 44/68
Основи на автоматскоуправување д-р Сашо Гелев 44
Анало%но на тоа( доколку системот има само еден
влез 'Y) и m излези (2/'Y)( 24'Y)( g( 2c'Y)( такKв
систем мо*е да се о$ише со матриа колона на
$реносните функии:
$ри што &ленот EI'1) се
дефинира с$оред следнатарелаија:
+а вакви системи се користи термин dI[e\D b[LY
h\YIL\D fYLY - dbhf.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 45/68
Основи на автоматскоуправување д-р Сашо Гелев 45
Коне&но( за о$ис на систем со $ове5е( на$р. r влезни
си%нали и $ове5е( на$р. m( излезни си%нали( тре"а да
се формира матриа на $реносни функии која има
редии колку што има излезни си%нали и колониколку што има влезови:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 46/68
Основи на автоматскоуправување д-р Сашо Гелев 46
$ри што &ленот EIP'1) од I-тата редиа и P-тата
колона мо*е да се дефинира како следниов
коли&ник:
+а вакви мултиварија"илни системи воанeлосаксонската литература се користи термин
hLYIL\D b[LY h\YIL\D fYLY # hbhf.
Г ф 'dI \ i\ E J)

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 47/68
Основи на автоматскоуправување д-р Сашо Гелев 47
Граф на текот на си%нали 'dIe[]\ i\Kj EX]LJ)
Покрај "лок дија%рамите( %рафот или дија%рамот на
текот на си%нали $ретставува $рикладен на&ин за$ретставува,е на математи&киот модел на
линеарните динами&ки системи.
;о "лок дија%рамот варија"лите на системот се
$ретставени со линиски се%менти( а $реносните
функии $омеFу $оедини варија"ли # со "локови.
;о %рафот на текот на си%нали варија"лите се$ретставуваат со јазли ( а $реносните функии(
или во о$шт слу&ај( функионалните врски
$омеFу варија"лите # со ориентирани гранки

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 48/68
Основи на автоматскоуправување д-р Сашо Гелев 48
$атоа %ејсон го дефинирал графот на текот на сигнали
&'" (*+ & ,./-* +/5)6 како 7мре*а која ја
со&инуваат јазли( меFусе"но $оврзани со
ориентирани %ранкиk.
Графовите нашле широка $римена во разни
о"ласти( $осе"но во електро- те=никата: теоријата
на активни $асивни електри&ни мре*и( системи нау$равува,е( теорија на на автомати итн
Посе"на $ракти&на $римена имаат ориентираните
%рафови $ри одредува,е на варија"лите восистемите &ии модели се дадени во вид на
ал%е"арски или дифернијални равенки

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 49/68
Основи на автоматскоуправување д-р Сашо Гелев 49
$а да ги разбере!е пои!ите јазол и %ранка (или лак)
да ја погледне!е равенката8
9аријаблите xi и xj !о:е да бидат функии одвре!ето6 ко!плексни фреквении или од кој било
друг аргу!ент;
9о најоп<т случај6 Aij претставува некој !ате!атичкиоператор6 кој варијаблата xi ја преведува
(трансфор!ира6 пресликува) во варијабла x j ;

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 50/68
Основи на автоматскоуправување д-р Сашо Гелев 5
6а равенката '8.7./C) и од%овара %рафот $рика*ан на
Сл. 8.7.4. Мо*е да се воо&и дека на јазлите им е
$ридру*ена $о една варија"ла( а на ориентиранаталинија '%ранка( лак) о$ератор на трансформаијата A! .
Сл.8.7.4 3сновна то$олошка шема
3свен јазол и %ранка( се дефинираат и дру%и $оимикои се врзани за самата форма и за $римената на
%рафот. Со ел дефинира,е на овие $оими 5е %о
на"lудуваме %рафот на Сл.8.7.7
Сл.8.7.7. Граф на текот на си%нали

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 51/68
Основи на автоматскоуправување д-р Сашо Гелев 51
Сл.8.7.7. Граф на текот на си%нали
Патека # мно*ество на сукесивно $оврзаниориентирани во иста насока %ранки $ри што секој
јазол се јавува само еднаш. Пример на $атека на
Сл.8.7.7:
9звор # јазол од ко%о %ранките само извираат.
Пример се на Сл.8.7.7 ( m/( m/C
Понор # јазол во ко%о %ранките само $онираат.
Пример се на Сл.8.7.7. ( m7( mB

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 52/68
Основи на автоматскоуправување д-р Сашо Гелев 52
Директна $атека # е патека која го спојува изворот и
понорот; =ри!ер на директна патека на л;4;3;3 е
патеката8
+атворена $атека & е патека која извира и понира воист јазол; =ри!ер на затворена патека на л;4;3;3 е
патеката8

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 53/68
Основи на автоматскоуправување д-р Сашо Гелев 53
Со$ствена затворена $атека - патека која која содр:и
една гранка; =ри!ер на ваква патека на л;4;3;3; е
патеката8
+асилува,е на %ранката & е оператор натрансфор!аијата на гранката;

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 54/68
Основи на автоматскоуправување д-р Сашо Гелев 54
+асилува,е $атеката # претставува производ назасилува>ата на сите гранки на патеката; =ри!ер на
л;4;3;38
Кру*но засилува,е на затворена $атака -
претставува производ на сите засилува>а возатворената патека;

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 55/68
Основи на автоматскоуправување д-р Сашо Гелев 55
Блок дија%рамите на системите( $рет=одно
$резентирани( лесно се $резентираат во %рафови на
текот на си%нали. 3ва се $ока*ува на следните три
слики.
Потре"но е во "лок дија%рамот $рво да се о"еле*ат
то&ките кои $ретставуваат одредени си%нали во
системот( а $отоа тие да се озна&ат со крук&и,а кои$ретставуваат јазли и до нив тре"а да се на$ишат
ознаките за си%налите.
Понатаму тре"а да се $оврзат јазлите со насо&ени%ранки 'лаи) со%ласно со насоката на текот на
си%налот

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 56/68
Основи на автоматскоуправување д-р Сашо Гелев 56
Сл.8.7.8. Приказ со ГTС на сериски с$ој и на $овратна врска

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 57/68
Основи на автоматскоуправување д-р Сашо Гелев 57
Сл.8.7.8. Приказ со "лок дија%рам со две $овратни врски со
%раф на текот на си%нали.

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 58/68
Основи на автоматскоуправување д-р Сашо Гелев 58
Сл.8.7.. Приказ со $осло*ен "лок дија%рам со %раф на текот на
си%нали.
М ј 'М n i \ )

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 59/68
Основи на автоматскоуправување д-р Сашо Гелев 59
Мејсоново $равило 'М]1K[n1 iKXc\])
Мејсоновото $равило е една мно%у едноставна
$оста$ка за $ресметува,е на $реносната функија'или матриата на $реносните функии во слу&ај на
мултиварија"илни системи) доколку системот е
$ретставен со структурен "лок дија%рам.
9лустраија на $римената на ова $равило 5е се
изврши на основа на систем со два влеза и со
еден излез &иј структурен "лок дија%рам е
$рика*ан на Сл.7.4.
Првиот &екор на $римената на Мејсоновото $равило

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 60/68
Основи на автоматскоуправување д-р Сашо Гелев 6
Првиот &екор на $римената на Мејсоновото $равило
е врз основа на до"иениот структурен "лок
дија%рам да се формира %раф на текот на си%налите
во кој јазлите на %рафот 5е $ретставувааткарактеристи&ни си%нали во структурниот "лок
дија%рам( а %ранките тре"а да $ретставуваат врски
$омеFу $оедините си%нали
;о"и&аено е за јазлите на %рафот да се усвојатвлезните и излезните си%нали( си%налите кои се
до"иваат од суматорите и си%налите кои се
мулти$лиираат.
!својувај5и %и за јазли на %рафот си%налите /( 4(
](Q(_(R(D(^ како е $ока*ано на Сл.7.4.( 5е се до"ие
%раф на текот на си%нали како на Сл. 7.7
!својувај5и %и за јазли на %рафот си%налите /( 4(

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 61/68
Основи на автоматско
управување д-р Сашо Гелев 61
](Q(_(R(D(^ како е $ока*ано на Сл.7.4.( 5е се до"ие
%раф на текот на си%нали како на Сл. 7.7
Сл.7.7.@ Граф на
текот на си%нали за
системот на Сл.7.4.
Сл 8.7.>: Пример на
"лок дија%рам на
систем со два влеза исо еден излез

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 62/68
Основи на автоматско
управување д-р Сашо Гелев 62
Следниот &екор е да се одредат сите контури на
%рафот и вку$ното засилува,е на контурите.
Под контура се $одраз"ира секвена на %ранки
кои $о&нуваат и завршаваат во иста то&ка $ри
што се $о&итува ориентаијата на %ранките.
+асилува,ето на контурата се $ресметува како
$роизвод на засилува,ата на сите %ранки кои
&инат контура. ;о до"иениот %раф на текот наси%нали се кријат шест контури со о$ределени
засилува,а:

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 63/68
Основи на автоматско
управување д-р Сашо Гелев 63

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 64/68
Основи на автоматско
управување д-р Сашо Гелев 64
Се%а е $отре"но да се формира детерминанта на
%рафот која се $ресметува $о следната формула:
$ри што во $рвата сума се $ресметуваат ситеконтури.( односно нивните засилува,а.
;тората сума %и со"ира $роизводите од сите
$арови контури кои не се до$ираат( третата сума
%и зема $редвид сите три$лети контури кои не се
до$ираат и така натака
Подраз"ираме дека две контури не се до$ираат
доколку имаат "арем еден заедни&ки јазол
С$оред тоа детерминантата на на"lудуваниот

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 65/68
Основи на автоматско
управување д-р Сашо Гелев 65
С$оред тоа( детерминантата на на"lудуваниот
%раф $останува:
Се%а е $отре"но да се во&ат директните $атеки од
влезните си%нали до излезот и $ри тоа за секоја од
тие директни $атеки тре"а да се $ресмета
соодветното засилува,е на $атеката и детерминантата.
+асилува,ето на $атеката се до"ива со мно*е,е на
засилува,ето на сите %ранки кои ја со&инуваат
$атеката( додека детерминантата на $атаката се$ресметува $о истата формула како за
детерминантата на елиот %раф( но се земаат
$редвид само оние контури кои не %и до$ираат
директните $атеки

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 66/68
Основи на автоматско
управување д-р Сашо Гелев 66
К ф

8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 67/68
Основи на автоматско
управување д-р Сашо Гелев 67
Коне&но( мо*но е да се формира матриа редиа на
$реносните функии( "идеј5и е во $раша,е систем
со два влеза и еден излез на следниот на&ин:
Да воо&име дека именителот во секој &лен на
матриата редиа на $реносните функии е ист и е
еднаков на детерминатата на %рафот.
;о "роителите тре"а да се наоFа з"ирот на
$роизводите на засилува,ата на директните $атаки
и соодветните детерминанти за сите директни
$атеки кои водат од на"lудуваниот влезен си%нал
до на"lудуваниот излезен си%нал.
8/18/2019 OAU-Predavanje 2
http://slidepdf.com/reader/full/oau-predavanje-2 68/68
3ва $равило ва*и за секој систем независно од
"ројот на влезни и излезни си%нали.
Tе=никата на %рафови на текот на си%нали иформулата за одредува,е на $реносната
функија мо*е корисно да се у$отре"ат за
анализа на системите со $овратна врска(
дија%рами за анало%ни ком$јутери( електронски
кола( статисти&ки системи( ме=ани&ки системи(
како и мно%у дру%и $римери.


















