
O UT - OF -S AMPLE E XTENSION AND R ECONSTRUCTION ON M ANIFOLDS Bhuwan Dhingra Final Year (Dual...
23
OUT-OF-SAMPLE EXTENSION AND RECONSTRUCTION ON MANIFOLDS Bhuwan Dhingra Final Year (Dual Degree) Dept of Electrical Engg.
-
Upload
daniella-norris -
Category
Documents
-
view
215 -
download
0
Transcript of O UT - OF -S AMPLE E XTENSION AND R ECONSTRUCTION ON M ANIFOLDS Bhuwan Dhingra Final Year (Dual...

OUT-OF-SAMPLE EXTENSION AND RECONSTRUCTION ON MANIFOLDSBhuwan DhingraFinal Year (Dual Degree)Dept of Electrical Engg.

INTRODUCTION
An m-dimensional manifold is a topological space which is locally homeomorphic to the m-dimensional Euclidean space
In this work we consider manifolds which are: Differentiable Embedded in a Euclidean space Generated from a set of m latent variables via a
smooth function f

INTRODUCTION
n >> m

NON-LINEAR DIMENSIONALITY REDUCTION
In practice we only have a sampling on the manifold
Y is estimated using a Non-Linear Dimensionality Reduction (NLDR) method
Examples of NLDR methods –ISOMAP, LLE, KPCA etc.
However most non-linear methods only provide the embedding Y and not the mappings f and g

PROBLEM STATEMENT
x*y*
g
f

OUTLINE
p is the nearest neighbor of x* Only the points in are used for extension and
reconstruction

OUTLINE
The tangent plane is estimated from the k-nearest neighbors of p using PCA
𝑥𝑖∈𝑁𝑝𝑘
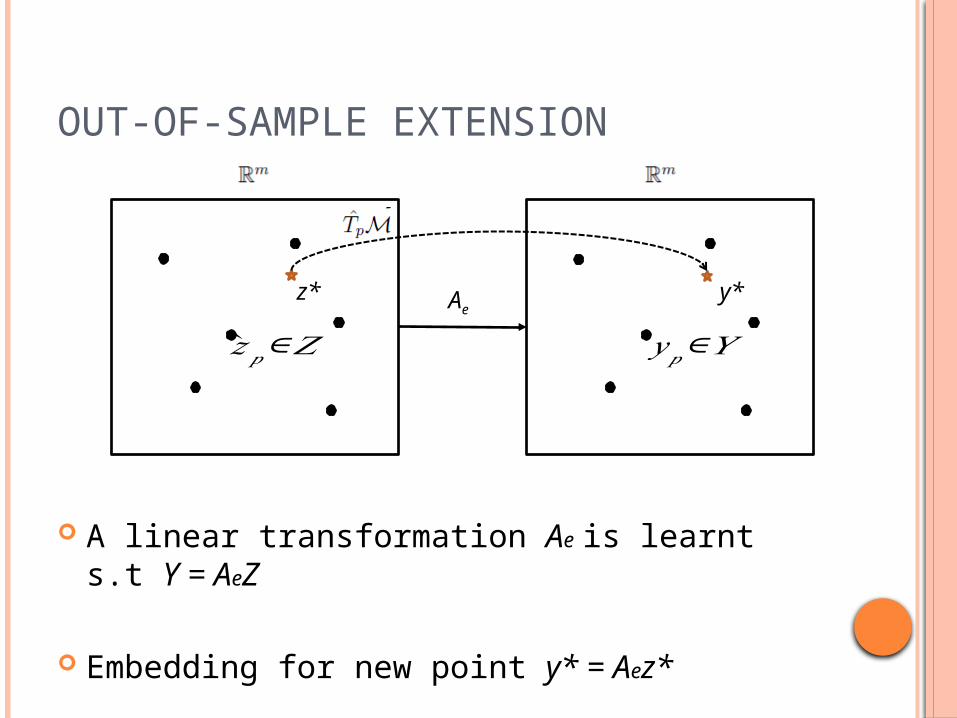
OUT-OF-SAMPLE EXTENSION
A linear transformation Ae is learnt s.t Y = AeZ
Embedding for new point y* = Aez*
�̂�𝑝∈𝑍 𝑦 𝑝∈𝑌Ae
z* y*

OUT-OF-SAMPLE RECONSTRUCTION
A linear transformation Ar is learnt s.t Z = ArY
Projection of reconstruction on tangent plane z* = Ary*
�̂�𝑝∈𝑍 𝑦 𝑝∈𝑌
z* y*Ar
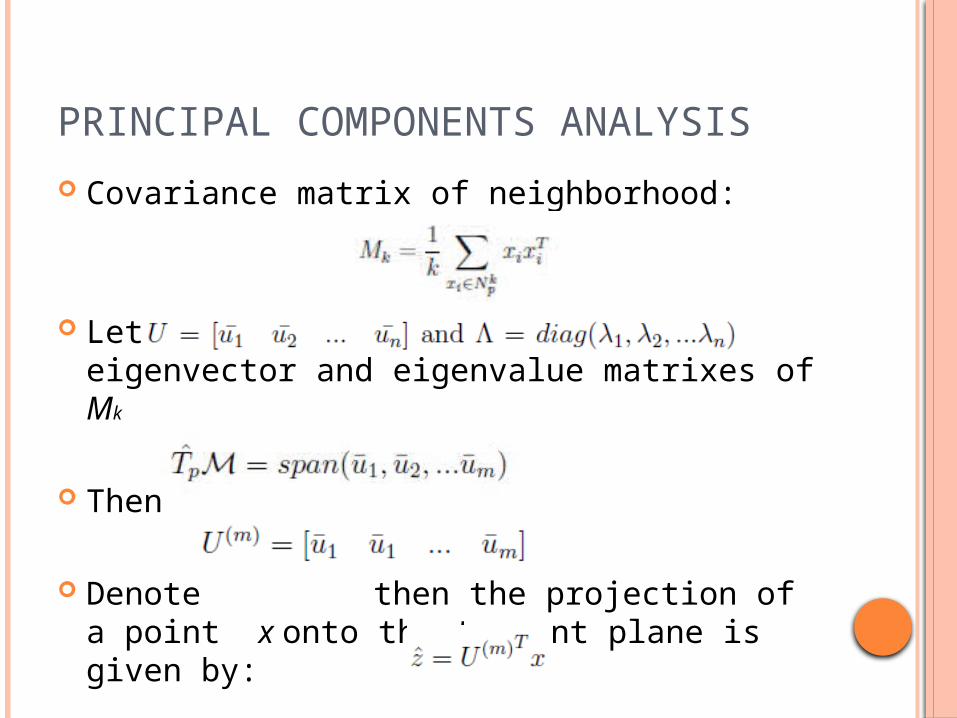
PRINCIPAL COMPONENTS ANALYSIS
Covariance matrix of neighborhood:
Let be the eigenvector and eigenvalue matrixes of Mk
Then
Denote then the projection of a point x onto the tangent plane is given by:

LINEAR TRANSFORMATION
Y and Z are both centered around and Then Ae =BeRe where Be and Re are scale and
rotation matrices respectively If is the singular value decomposition
of ZTY, then

FINAL ESTIMATES

ERROR ANALYSIS
We don’t know the true form of f or g to compare our estimates against
Reconstruction Error: For a new point x* its reconstruction is computed as , and the reconstruction error is

SAMPLING DENSITY
To show: As the sampling density of points on the manifold increases, reconstruction error of a new point goes to 0
In a k-NN framework, the sampling density can increase in two ways: k remains fixed and the sampling width
decereases remains fixed and
We consider the second case

NEIGHBORHOOD PARAMETERIZATION
Assume that the first m-canonical vectors of are along

RECONSTRUCTION ERROR
But ArAe = I, hence

RECONSTRUCTION ERROR
Tyagi, Vural and Frossard (2012) derive conditions on k s.t the angle between and is bounded
They show that as
Equivalently, where Rm is an aribitrary m-dimensional rotation matrix
and

RECONSTRUCTION ERROR
Hence the reconstruction approaches the projection of x* onto

SMOOTHNESS OF MANIFOLD
If the manifold is smooth then all will be smooth
Taylor series of :
As because x* will move closer to p

RESULTS - EXTENSION
Out of sample extension on the Swiss-Roll dataset
Neighborhood size = 10

RESULTS - EXTENSION
Out of sample extension on the Japanese flag dataset
Neighborhood size = 10

RESULTS - RECONSTRUCTION
Reconstructions of ISOMAP faces dataset (698 images)
n = 4096, m = 3 Neighborhood size = 8

RECONSTRUCTION ERROR V NUMBER OF POINTS ON MANIFOLD
ISOMAP Faces dataset Number of cross validation sets = 5 Neighborhood size = [6, 7, 8, 9]


















