
Notions fondamentales sur le démarrage des moteurs
43
Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM
Transcript of Notions fondamentales sur le démarrage des moteurs

Notions fondamentales sur ledémarrage des moteursDémarrage traditionnelDémarreur progressif, convertisseur defréquence Motor
Management
TM

Préface
Ce manuel technique sur le démarrage des moteurs fait partie d’une série de
publications ayant pour thème la gestion des moteurs soit le “Motor Management”.
Grâce à la publication de ces notions fondamentales, l’utilisateur peut bénéficier d’un
ouvrage de référence évolutif sur l’utilisation de la puissance pour la conception et
l’application.
Les thèmes suivants sont traités :
• Protection des moteurs et des entraînements
• Sélection et utilisation des contacteurs
• Communications
Les manuels techniques suivants sont déjà parus :
• “Notions fondamentales d’utilisation des moteurs triphasés à courant alternatif”, qui
traite de la construction, des modes de fonctionnement, du choix et du
dimensionnement des moteurs et
• “Disjoncteurs : notions fondamentales”, qui contient des données supplémentaires
sur l’utilisation pratique des disjoncteurs.
De nos jours, les moteurs font partie de tous les processus de production. Pour cette
raison, l’utilisation optimale de votre application devient de plus en plus importante en
vue de garantir une exploitation rentable. A ce titre, la série “Motor Management” de
Rockwell Automation vous aidera à :
• optimiser l’utilisation de vos systèmes
• minimiser les coûts d’entretien
• accroître la sécurité d’exploitation.
Nous nous réjouissons de mettre à votre disposition ces publications qui fourniront sans
doute une aide précieuse pour trouver des solutions économiques et efficaces adaptées à
votre application.
Copyright © 1997 by Rockwell Automation AG
Nous garantissons la précision des informations fournies dans ce manuel au mieux de notre
connaissance et en déclinant toute responsabilité légale éventuelle.
i

Démarrage des moteurs électriques
Sommaire
1 Démarrage traditionnel 1.1
1.1 Démarrage étoile-triangle 1.11.1.1 Démarrage étoile-triangle normal 1.11.1.2 Démarrage étoile-triangle renforcé 1.51.1.2.1 Démarrage étoile-triangle mixte 1.51.1.2.2 Démarrage étoile-triangle sur fraction d’enroulement 1.61.1.3 Démarrage étoile-triangle à transition fermée 1.6
1.2 Démarrage par autotransformateur 1.81.3 Démarrage avec bobines de self ou résistances 1.91.3.1 Démarrage avec bobines de self 1.91.3.2 Démarrage avec résistances 1.10
1.4 Moteurs multi-vitesses 1.11
2 Démarreur progressif 2.1
2.1 Généralités 2.12.2 Réalisation du démarrage progressif 2.22.2.1 Diminution du couple moteur 2.32.2.2 Influence de la tension moteur 2.3
2.3 Types de démarrage 2.42.3.1 Démarrage sur rampe de tension 2.42.3.2 Démarrage sur limite de courant 2.52.3.3 Couples 2.5
2.4 Types de démarreurs Progressif 2.52.4.1 Démarreur progressif commandé par alternance 2.6
complète sur une phase 2.4.2 Démarreur progressif commandé par demi-alternance 2.7
sur trois phases 2.4.3 Démarreur progressif commandé par alternance 2.8
complète sur trois phases
2.5 Charge thermique au démarrage 2.82.6 Avantages du démarreur progressif 2.92.7 Avantages pour le client 2.92.7.1 Avantages mécaniques 2.92.7.2 Avantages électriques 2.10
ii

2.8 Possibilités de mises en œuvre 2.102.9 Démarrage des pompes 2.112.9.1 Comportement du courant et du couple avec 2.11
démarrage étoile-triangle2.9.2 Comportement de la vitesse avec démarreur 2.12
progressif pour pompe 2.9.3 Comparaison des courbes de couple 2.122.9.4 Comportement du flux lors du démarrage 2.132.9.5 Comportement du flux lors de l’arrêt 2.132.9.6 Conditions pour un démarreur progressif pour pompe 2.142.9.7 Domaines d’application 2.14
2.10 Options 2.14
3 Convertisseur de fréquence 3.1
3.1 Généralités 3.13.2 Construction 3.13.2.1 Redresseur de tension réseau 3.23.2.1.1 Représentation de principe de la tension continue pulsée 3.23.2.2 Circuit intermédiaire 3.33.2.3 Onduleur 3.33.2.3.1 Représentation de principe de la modulation d’impulsions en durée 3.4
3.3 Régimes de fonctionnement 3.43.3.1 Relation fréquence-tension 3.43.3.2 Accentuation de tension ou boost 3.53.3.3 Compensation du glissement 3.63.3.4 Valeur de consigne 3.63.3.5 Compensation 3.63.3.6 Protection moteur 3.73.3.7 Changement du sens de rotation et freinage 3.7
3.4 Avantages du convertisseur de fréquence 3.83.5 Perturbations fréquence radio 3.83.5.1 Généralités 3.83.5.2 Normes 3.93.5.3 Mesures correctives 3.10
4 Comparaison des procédés de démarrage 4.1
Démarrage des moteurs électriques
iii

Démarrage des moteurs électriquesGrâce à leur simplicité, leur robustesse et leur coût attractif, les moteurs à cage sont les
moteurs les plus souvent utilisés dans l’industrie. En commutation directe, ils absorbent
un courant de démarrage jusqu’à 8 fois plus important que le courant nominal et ils
développent donc un couple de démarrage élevé.
Les courants de démarrage élevés ont souvent comme conséquence une chute de tension
désagréable et les couples de démarrage élevés nécessitent des éléments mécaniques
résistant aux surcharges. C’est la raison pour laquelle les distributeurs d’électricité
fixent des valeurs limites pour les courants de démarrage des moteurs, par rapport aux
courants de fonctionnement nominaux. Les valeurs permises varient d’un réseau à
l’autre, en fonction de la charge. En ce qui concerne la mécanique, des procédés qui
diminuent les couples de démarrage sont souhaitables.
Pour diminuer les courants et les couples, il existe différentes commutations et
méthodes de démarrage :
• Démarrage étoile-triangle
• Démarrage par autotransformateur
• Démarrage avec bobines de self ou résistances
• Démarrage multi-vitesses
• Démarrage avec démarreur progressif électronique
• Démarrage avec convertisseur de fréquence
Les méthodes de démarrage les plus importantes utilisées dans la pratique sont
présentées ci-dessous.
1 Démarrage traditionnel
1.1 Démarrage étoile-triangleOn distingue les méthodes suivantes :
• Démarrage étoile-triangle normal
• Démarrage étoile-triangle renforcé
• Démarrage étoile-triangle à transition fermée (closed transition)
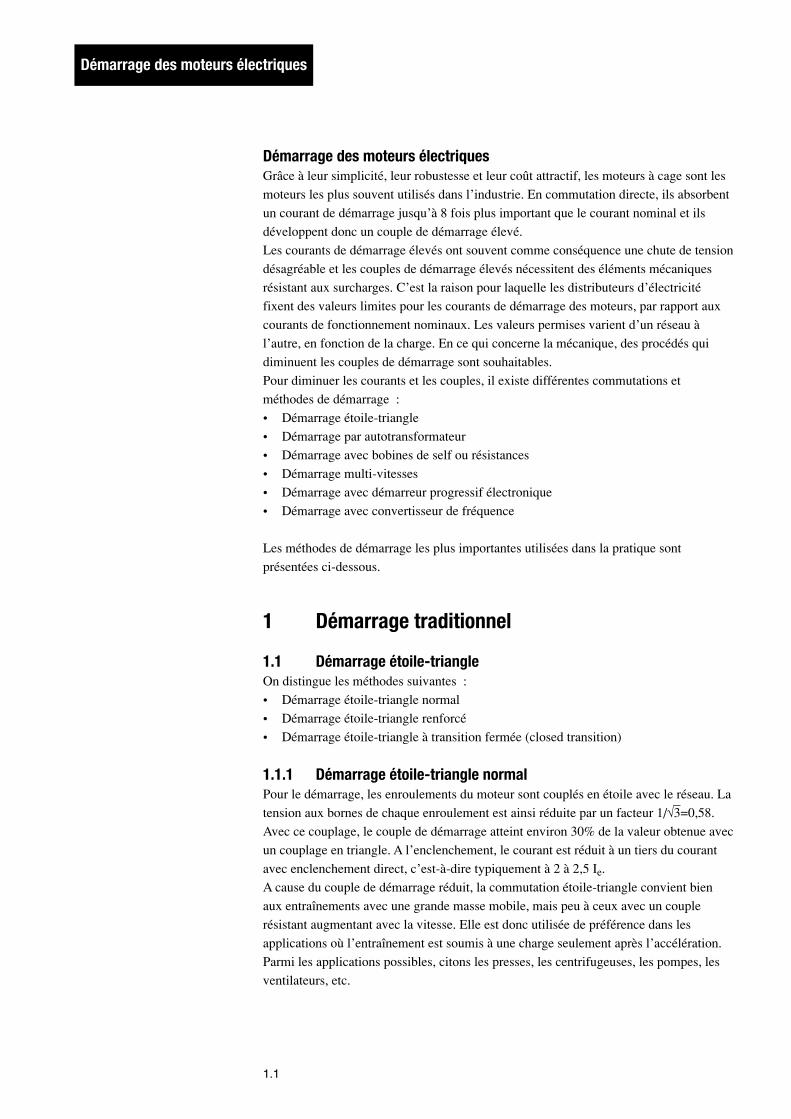
1.1.1 Démarrage étoile-triangle normalPour le démarrage, les enroulements du moteur sont couplés en étoile avec le réseau. La
tension aux bornes de chaque enroulement est ainsi réduite par un facteur 1/√_3=0,58.
Avec ce couplage, le couple de démarrage atteint environ 30% de la valeur obtenue avec
un couplage en triangle. A l’enclenchement, le courant est réduit à un tiers du courant
avec enclenchement direct, c’est-à-dire typiquement à 2 à 2,5 Ie.
A cause du couple de démarrage réduit, la commutation étoile-triangle convient bien
aux entraînements avec une grande masse mobile, mais peu à ceux avec un couple
résistant augmentant avec la vitesse. Elle est donc utilisée de préférence dans les
applications où l’entraînement est soumis à une charge seulement après l’accélération.
Parmi les applications possibles, citons les presses, les centrifugeuses, les pompes, les
ventilateurs, etc.
Démarrage des moteurs électriques
1.1

Démarrage des moteurs électriques
1.2
ML
7
6
5
4
3
2
1
0,25 0,5 0,75 1
3
2
1
MMN I
Ie
I∆
IY
IA
M∆
MY
nns
L1 L3L2
V1
V2 W1
W2
U1IWUU2
Ue
IWV
ILD
L1 L3L2
V1
V2
W1
W2
U1
U2
Ue
IWU
ILY = 13
ILD
ZW
Ue
�3
Caractéristiques types de courant et de couple lors du démarrage étoile-triangle
Rapport entre les courants avec couplage étoile et couplage triangle
Couplage étoile Couplage triangle
I Courant moteur
Ie Courant de service nominal du
moteur
MD Couple avec couplage triangle
ME Couple avec couplage étoile
ILY Courant d’alimentation avec couplage étoile
ILD Courant d’alimentation avec couplage
triangle
IW Courant d’enroulement
Ue Tension réseau entre phases
ZW Impédance enroulement
n Vitesse de rotation
ns Vitesse synchrone
ML Couple résistant
IY Courant avec couplage étoile
ID Courant avec couplage triangle
IA Caractéristique de courant avec
commutation étoile-triangle
ILY = IWU =Ue
√_3 ZW
IL1D = IWU + IWV
ILD = IW √_3 =
Ue √_3 = 3 ILY
ZW
ILY =1
ILD3

Après accélération du moteur, un relais de temporisation commute automatiquement le
couplage étoile en couplage triangle. La phase de démarrage en couplage étoile doit
durer jusqu’à ce que le moteur ait atteint une vitesse voisine de la vitesse de service, de
manière à supporter un minimum de post-accélérations après la commutation en
triangle. Les post-accélérations en couplage triangle entraînent des courants élevés
comme avec le démarrage direct. La durée de la phase de démarrage en couplage étoile
dépend de la charge du moteur. En couplage triangle, les enroulements du moteurs sont
soumis à la tension entière du réseau.
Pour effectuer la commutation étoile-triangle les 6 extrémités des enroulements du
moteur sont couplées à des bornes de connexion. Les contacteurs d’un démarreur étoile-
triangle commutent les enroulements en conséquence.
Pour le démarrage en étoile, le contacteur principal ferme le réseau aux extrémités des
enroulements U1, V1, W1. Le contacteur étoile relie les extrémités des enroulements
U2, V2, W2. Après la phase d’accélération, le contacteur étoile coupe et le contacteur
triangle relie les bornes U1/V2, V1/W2, W1/U2.
Lors de la commutation étoile-triangle, il faut respecter la séquence correcte des phases,
c’est-à-dire la connexion correcte du conducteur au moteur et au démarreur. En cas de
mauvaise séquence, à cause de la faible chute de vitesse pendant la pause de
commutation sans courant lors de la recommutation, il peut se produire des pointes de
courant très élevées, qui peuvent endommager les enroulements et qui chargent
inutilement les contacteurs. Le sens de rotation du moteur est également à contrôler.
Démarrage des moteurs électriques
1.3
Commutation étoile-triangle avec contacteurs

Démarrage des moteurs électriques
Entre la coupure du contacteur étoile et la commutation du contacteur triangle, un temps
de pause suffisant doit s’écouler pour que l’arc de mise hors circuit dans le contacteur
étoile s’éteigne. Si la commutation est trop rapide, un court-circuit dû à l’arc de mise
hors circuit peut se produire. La durée de la pause de commutation doit suffire à
éteindre l’arc de mise hors-circuit tout en minimisant la chute de vitesse pendant la
pause de commutation. Des relais de temporisation spéciaux pour la commutation
étoile-triangle remplissent ces exigences.
Protection moteur et dimensionnement des contacteursLe relais de protection du moteur est couplé aux phases des enroulements, c’est-à-dire
au contacteur principal. Le courant à appliquer est ainsi plus petit d’un facteur
1/√_3=0.58 que le courant nominal moteur. A cause des courants de la troisième
oscillation harmonique circulant dans les enroulements, un réglage plus élevé du relais
de protection du moteur peut être nécessaire. Ceci ne peut être fait que sur la base d’une
mesure effectuée avec un instrument capable de mesurer la valeur effective correcte. La
section des conducteurs vers le moteur et pour le retour doit être dimensionnée
thermiquement en fonction du courant de réglage du relais de protection du moteur.
En cas de protection par des disjoncteurs ayant une caractéristique de protection de
moteur, le disjoncteur est connecté dans les conducteurs réseau car il prend en charge la
protection contre les courts-circuits de la ligne et du démarreur. Dans ce cas, le réglage
de courant se fait sur le courant nominal du moteur. Une correction du réglage à cause
de la troisième oscillation harmonique n’est dans ce cas pas nécessaire. Les conducteurs
doivent être thermiquement dimensionnés selon le réglage du disjoncteur.
Avec démarrage étoile-triangle, les contacteurs doivent être dimensionnés selon les
courants suivants :
• Contacteur principal K1M 0,58 Ie
• Contacteur triangle K2M 0,58 Ie
• Contacteur étoile K3M 0,34 Ie
Pour des phases de démarrage supérieures à 15 secondes environ, un contacteur étoile
plus fort doit être choisi. Si le contacteur étoile est de la même dimension que le
contacteur principal, des phases de démarrage allant jusqu’à 1 minute sont permises.
1.4
Connexion correcte du moteur

Démarrage des moteurs électriques
1.5
1.1.2 Démarrage étoile-triangle renforcéSi, avec le démarrage normal étoile-triangle, le couple est insuffisant pour accélérer
l’entraînement en couplage étoile au voisinage de la vitesse de service, le démarrage
étoile-triangle renforcé peut être utilisé. Bien entendu, la consommation de courant
augmente en même temps que le couple d’entraînement.
On distingue les démarrages suivants :
• Démarrage étoile-triangle mixte
• Démarrage étoile-triangle sur fraction d’enroulement
Pour ces deux types de démarrage, des moteurs avec prises correspondantes sur les
enroulements sont nécessaires.
Les mêmes règles que pour le démarrage étoile-triangle normal s’appliquent pour la
connexion du moteur, la commande des contacteurs, la protection du moteur et le
dimensionnement thermique des conducteurs.
1.1.2.1 Démarrage étoile-triangle mixteDans ce cas, les enroulements du moteur sont la plupart du temps divisés en deux
moitiés égales. Lors du démarrage, chaque demi-enroulement est commuté en triangle
alors que l’autre demi-enroulement est commuté en étoile. D’où la désignation de
démarrage “mixte”. Le courant de commutation étoile est environ de 2 à 4 Ie. Il en
résulte un couple de démarrage plus important.
Dimensionnement des contacteurs :
• Contacteur principal K1M 0,58 Ie
• Contacteur triangle K2M 0,58 Ie
• Contacteur étoile K3M 0,34 Ie
L1 L3L2
H
H
H
D
D
D
Y
Y
Y
V1
V3
V3
V2
W1
W3
W3
W2
U1
U3 U2U3
Démarrage étoile-triangle mixte

Démarrage des moteurs électriques
1.1.2.2 Démarrage étoile-triangle sur fraction d’enroulementDans ce cas, les enroulements du moteur sont également divisés. En couplage étoile,
seul l’enroulement principal, c’est-à-dire une partie de l’enroulement complet, est
utilisé. D’où la désignation de démarrage “sur fraction d’enroulement”. Le courant de
commutation étoile se situe entre 2 et 4 Ie , ce qui produit également un couple de
démarrage plus important.
Dimensionnement des contacteurs :
• Contacteur principal K1M 0,58 Ie
• Contacteur triangle K2M 0,58 Ie
• Contacteur étoile K3M 0,5 - 0,58 Ie (selon courant de démarrage)
1.1.3 Démarrage étoile-triangle à transition ferméeAvec ce type de commutation, la chute de vitesse pendant la commutation étoile-
triangle est évitée et les pointes de courant conséquentes sont maintenues à un faible
niveau.
Avant l’ouverture du contacteur étoile, un quatrième contacteur K4M (contacteur de
transition) du circuit moteur se ferme et met en circuit les résistances en triangle. Le
courant moteur n’est alors pas interrompu pendant la commutation et la vitesse du
moteur reste pratiquement constante. Le contacteur triangle K2M établit ensuite l’état
de commutation définitif et déclenche le contacteur de transition K4M.
1.6
L1 L3L2
H
HH
D
D
D
YY
Y
V1
V3
V3V2
W1
W3
W3
W2
U1U3
U2
U3
Démarrage étoile-triangle sur fraction d’enroulement

Dimensionnement des contacteurs et résistances:
• Contacteur principal K1M 0,58 Ie
• Contacteur triangle K2M 0,58 Ie
• Contacteur étoile K3M 0,58 Ie
• Contacteur de transition K4M typ. 0,27 Ie (selon courant de transition)
• Résistances de transition typ. 0,35 à 0,4 Ue/Ie
Contrairement à la commutation étoile-triangle normale, le contacteur étoile doit être
dimensionné comme le contacteur principal et le contacteur triangle car il doit mettre
hors circuit le courant étoile du moteur et les résistances de transition. Dans les
résistances, circule un courant d’environ 1,5 Ie. Une puissance de commutation
correspondante plus élevée est donc nécessaire.
Les mêmes règles que pour le démarrage étoile-triangle normal s’appliquent pour la
connexion du moteur, la commande des contacteurs (commutation différente à cause de
la commande du contacteur de transition), la protection du moteur et le
dimensionnement thermique des conducteurs.
Démarrage des moteurs électriques
1.7
H+YA
H+DD
H+TC
H+Y+TB
Démarrage étoile-triangle à transition fermée

Démarrage des moteurs électriques
1.2 Démarrage par autotransformateurLe démarrage par autotransformateur permet le démarrage des moteurs à cage avec un
courant réduit dû à une réduction de tension pendant la durée d’accélération.
Contrairement à la commutation étoile-triangle, seuls trois conducteurs vers le moteur et
3 connexions moteur sont nécessaires. Ce type de commutation est particulièrement
répandu dans les pays anglophones.
Lors du démarrage, le moteur reste sur les prises de l’autotransformateur. Le moteur
démarre également avec une tension réduite et un courant correspondant plus petit.
L’autotransformateur diminue le courant dans le conducteur réseau selon son rapport de
transformation. Comme pour la commutation étoile-triangle, le démarreur par
autotransformateur présente un rapport couple-consommation de courant avantageux.
Pour pouvoir adapter la caractéristique de démarrage du moteur au besoin en couple, les
autotransformateurs comportent la plupart du temps trois prises sélectionnables (par
exemple 80%, 65% et 50%).
Lorsque le moteur a atteint une vitesse voisine de sa vitesse nominale, la liaison étoile
de l’autotransformateur s’ouvre. Les fractions d’enroulement du transformateur se
comportent alors comme des bobines de self en série avec les enroulements du moteur
et par conséquent, comme pour le démarrage étoile-triangle à transition fermée, la
vitesse du moteur ne chute pas pendant la commutation. Après mise en circuit du
contacteur principal, la tension entière du réseau est appliquée aux enroulements du
moteur. Enfin, le transformateur est déconnecté du réseau.
En fonction de chaque prise et rapport de courant de démarrage, le courant de
commutation est de 1 à 5 x Ie. Le couple à disposition diminue quelque peu en fonction
du courant de démarrage.
1.8
Démarreur par autotransformateur avec commutation à transition fermée
(Commutation “Korndörfer”)

1.3 Démarrage avec bobines de self ou résistancesGrâce à des bobines de self ou des résistances couplées en série, la tension moteur et
donc le courant de démarrage sont réduits. Le couple de démarrage diminue en fonction
du carré de la diminution du courant.
1.3.1. Démarrage avec bobines de selfA l’arrêt, la résistance du moteur est faible. Une grande partie de la tension est réduite
par les bobines de self couplées en série. Le couple de démarrage du moteur est alors
fortement diminué. Lorsque la vitesse augmente, la tension aux bornes du moteur
augmente à cause du retour du courant d’utilisation et de la répartition vectorielle de
tension entre le moteur et la réactance couplée en série. Le couple moteur augmente
alors également. Après la phase d’accélération les bobines de self sont court-circuitées.
Le courant de commutation diminue en fonction du couple de démarrage nécessaire.
Démarrage des moteurs électriques
1.9
Démarrage avec bobines de self

Démarrage des moteurs électriques
1.3.2. Démarrage avec résistancesDes résistances de faible coût sont montées à la place des bobines de self décrites ci-
dessus.
Avec cette méthode, la réduction possible du courant de démarrage est peu prononcée
car le couple moteur diminue de manière quadratique par rapport à la tension.
L’augmentation de la tension aux bornes du moteur est un effet de la baisse de
consommation de courant lorsque la vitesse augmente.
Il est préférable de diminuer les résistances par étages lors du démarrage. Le coût des
contacteurs est cependant plus important.
Une autre possibilité réside dans l’utilisation de résistances humides (électrolyte)
étanches. Avec ces éléments, la résistance ohmique diminue avec la montée en
température due à l’effet du courant de démarrage.
1.10
Démarrage avec résistances
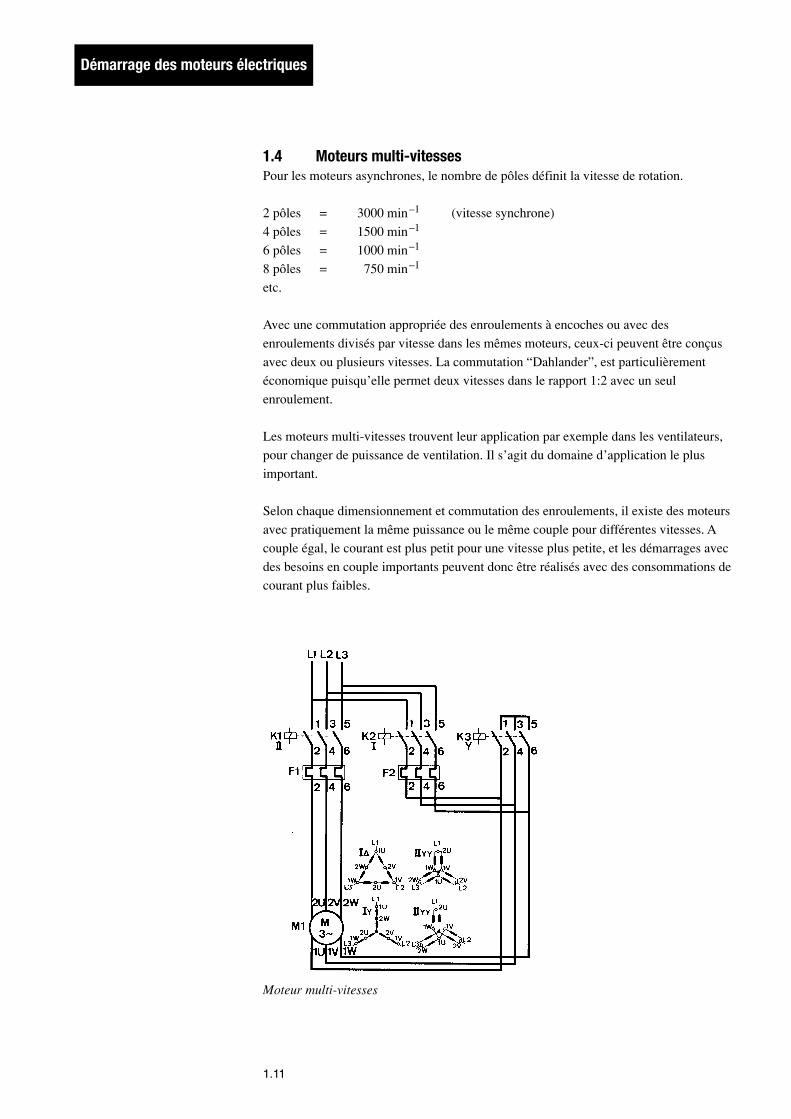
1.4 Moteurs multi-vitessesPour les moteurs asynchrones, le nombre de pôles définit la vitesse de rotation.
2 pôles = 3000 min–1 (vitesse synchrone)
4 pôles = 1500 min–1
6 pôles = 1000 min–1
8 pôles = 750 min–1
etc.
Avec une commutation appropriée des enroulements à encoches ou avec des
enroulements divisés par vitesse dans les mêmes moteurs, ceux-ci peuvent être conçus
avec deux ou plusieurs vitesses. La commutation “Dahlander”, est particulièrement
économique puisqu’elle permet deux vitesses dans le rapport 1:2 avec un seul
enroulement.
Les moteurs multi-vitesses trouvent leur application par exemple dans les ventilateurs,
pour changer de puissance de ventilation. Il s’agit du domaine d’application le plus
important.
Selon chaque dimensionnement et commutation des enroulements, il existe des moteurs
avec pratiquement la même puissance ou le même couple pour différentes vitesses. A
couple égal, le courant est plus petit pour une vitesse plus petite, et les démarrages avec
des besoins en couple importants peuvent donc être réalisés avec des consommations de
courant plus faibles.
Démarrage des moteurs électriques
1.11
Moteur multi-vitesses


Démarrage des moteurs électriques
2 Démarreur progressif
2.1 GénéralitésSelon la qualité du réseau, des variations rapides du courant consommé, comme c’est le
cas lors du démarrage d’un moteur, peuvent provoquer des chutes de tension qui
perturbent les autres appareils alimentés par le même réseau :
• Fluctuations de luminosité des éclairages
• Influence sur les installations informatiques
• Défaillances des contacteurs et des relais
Lors des démarrages, les éléments mécaniques d’une machine ou installation sont
fortement sollicités par l’impact du couple dû au démarrage.
Avec les solutions traditionnelles telles que :
• commutation étoile-triangle
• autotransformateur
• bobines de self ou résistances,
la tension aux bornes du moteur ainsi que le courant ne peuvent être influencés que par
étapes.
Le démarreur progressif gère en continu la tension depuis une valeur de départ
sélectionnable jusqu’à cent pour-cent. Le couple et le courant augmentent ainsi de
manière continuelle. Le démarreur progressif permet également un cycle d’arrêt
continuel du moteur sous charge.
2.1

Démarrage des moteurs électriques
2.2 Réalisation du démarrage progressif
La caractéristique de couple du moteur permet d’expliquer comment obtenir un
démarrage de moteur lent.
En comparant la caractéristique de charge avec la caractéristique du moteur, il apparaît
que la caractéristique de couple du moteur se situe toujours au-dessus de la
caractéristique du couple résistant, jusqu’à ce qu’elle coupe cette dernière.
A ce moment du cycle, la charge nominale atteint la vitesse nominale.
La différence entre la caractéristique du couple résistant et la caractéristique du couple
moteur représente ce qu’on appelle le couple d’accélération (MB). Ce couple fournit
l’énergie servant à commencer à faire tourner et à accélérer l’entraînement.
Le rapport entre les deux caractéristiques représente la mesure du temps de démarrage
ou d’accélération d’un entraînement. Si le couple moteur est beaucoup plus grand que le
couple résistant, l’énergie d’accélération est grande et donc le temps d’accélération est
court. Si par contre le couple moteur est seulement un peu plus grand que le couple
résistant, il fournit une faible énergie et le temps d’accélération est d’autant plus grand.
Le démarrage progressif est ainsi réalisé en diminuant le couple d’accélération.
2.2
Caractéristiques moteur

Démarrage des moteurs électriques
2.2.1 Diminution du couple moteur
Les caractéristiques représentées ne sont valables que lorsque toute la tension UN est à
disposition. Aussitôt qu’une tension plus petite est appliquée, le couple est réduit de
manière quadratique. Si la tension effective du moteur est réduite de 50%, le couple est
alors réduit au quart de sa valeur. En comparant les caractéristiques du couple moteur et
du couple résistant, on voit que l’écart est plus important en présence de la tension du
réseau UNetz que pour la tension réduite Ured. Le couple moteur et donc la force
d’accélération sont influencés par l’adaptation de la tension aux bornes du moteur.
2.2.2 Influence de la tension moteur
La tension moteur est facilement modifiée avec une commande à découpage de phase.
Au moyen d’un semi-conducteur, le thyristor, il est possible de n’appliquer au moteur
qu’une partie de la tension, en coupant la demi-alternance sinusoïdale. A l’instant où le
thyristor coupe la demi-alternance sinusoïdale, on définit l’angle d’amorçage “Alpha”.
Si l’angle “Alpha” est grand, la tension eff. moteur est petite. En déplaçant petit à petit
l’angle d’amorçage “Alpha” vers la gauche, la tension eff. moteur augmente. Avec la
commande correspondante, le découpage de phase est une méthode simple et efficace
pour modifier la tension moteur.
2.3
Caractéristiques de couple
Découpage de phase
Démarrage des moteurs électriques
2.3 Types de démarrageIl y a deux possibilités principales pour faire démarrer un moteur progressivement. Il
s’agit du démarrage sur rampe de tension et du démarrage sur limite de courant.
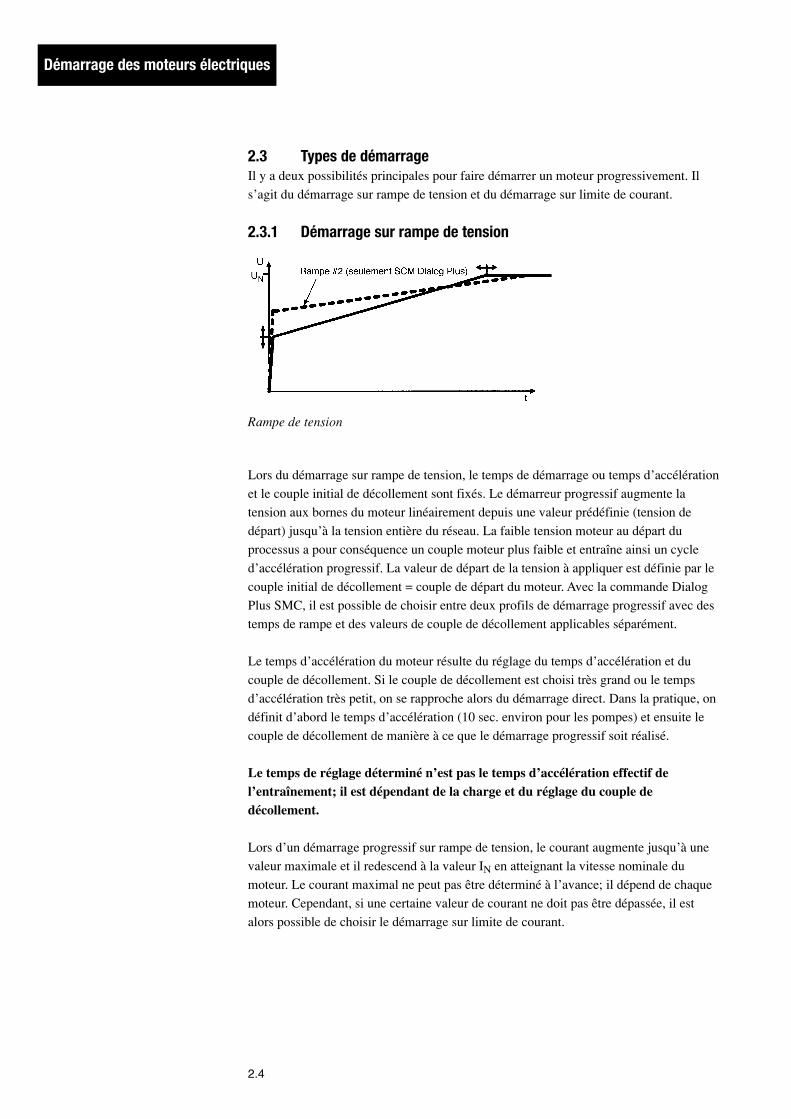
2.3.1 Démarrage sur rampe de tension
Lors du démarrage sur rampe de tension, le temps de démarrage ou temps d’accélération
et le couple initial de décollement sont fixés. Le démarreur progressif augmente la
tension aux bornes du moteur linéairement depuis une valeur prédéfinie (tension de
départ) jusqu’à la tension entière du réseau. La faible tension moteur au départ du
processus a pour conséquence un couple moteur plus faible et entraîne ainsi un cycle
d’accélération progressif. La valeur de départ de la tension à appliquer est définie par le
couple initial de décollement = couple de départ du moteur. Avec la commande Dialog
Plus SMC, il est possible de choisir entre deux profils de démarrage progressif avec des
temps de rampe et des valeurs de couple de décollement applicables séparément.
Le temps d’accélération du moteur résulte du réglage du temps d’accélération et du
couple de décollement. Si le couple de décollement est choisi très grand ou le temps
d’accélération très petit, on se rapproche alors du démarrage direct. Dans la pratique, on
définit d’abord le temps d’accélération (10 sec. environ pour les pompes) et ensuite le
couple de décollement de manière à ce que le démarrage progressif soit réalisé.
Le temps de réglage déterminé n’est pas le temps d’accélération effectif del’entraînement; il est dépendant de la charge et du réglage du couple dedécollement.
Lors d’un démarrage progressif sur rampe de tension, le courant augmente jusqu’à une
valeur maximale et il redescend à la valeur IN en atteignant la vitesse nominale du
moteur. Le courant maximal ne peut pas être déterminé à l’avance; il dépend de chaque
moteur. Cependant, si une certaine valeur de courant ne doit pas être dépassée, il est
alors possible de choisir le démarrage sur limite de courant.
2.4
Rampe de tension
Démarrage des moteurs électriques
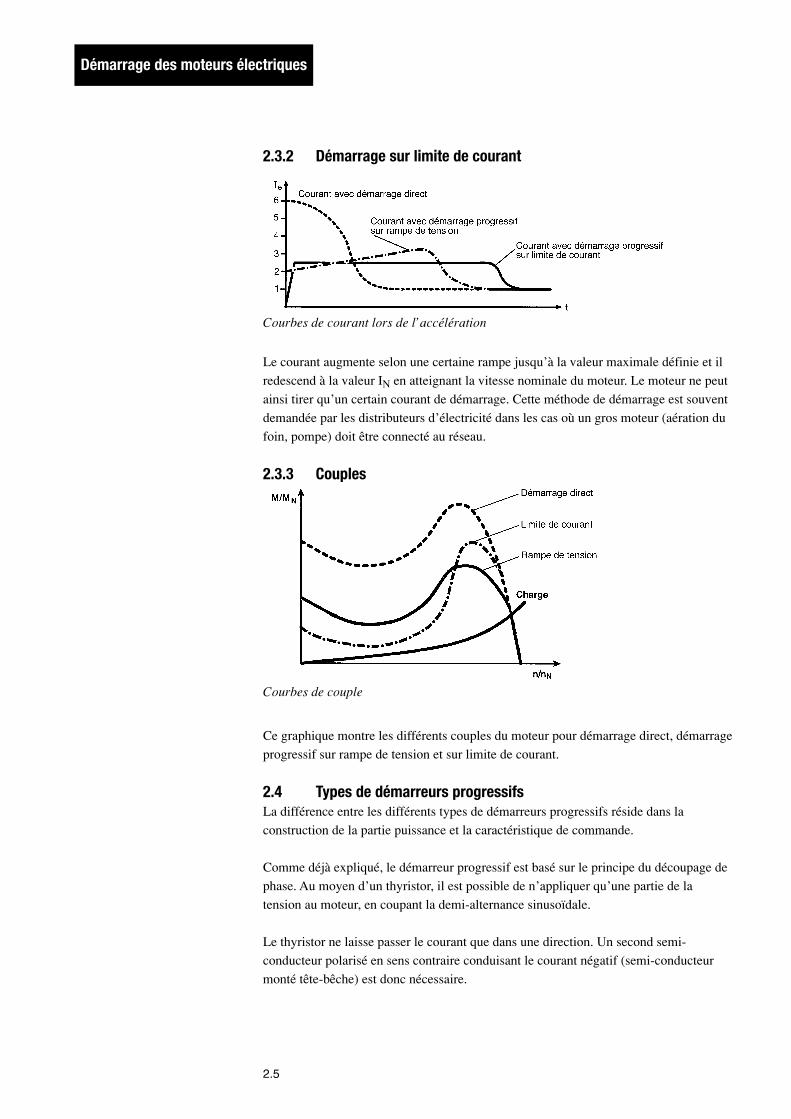
2.3.2 Démarrage sur limite de courant
Le courant augmente selon une certaine rampe jusqu’à la valeur maximale définie et il
redescend à la valeur IN en atteignant la vitesse nominale du moteur. Le moteur ne peut
ainsi tirer qu’un certain courant de démarrage. Cette méthode de démarrage est souvent
demandée par les distributeurs d’électricité dans les cas où un gros moteur (aération du
foin, pompe) doit être connecté au réseau.
2.3.3 Couples
Ce graphique montre les différents couples du moteur pour démarrage direct, démarrage
progressif sur rampe de tension et sur limite de courant.
2.4 Types de démarreurs progressifsLa différence entre les différents types de démarreurs progressifs réside dans la
construction de la partie puissance et la caractéristique de commande.
Comme déjà expliqué, le démarreur progressif est basé sur le principe du découpage de
phase. Au moyen d’un thyristor, il est possible de n’appliquer qu’une partie de la
tension au moteur, en coupant la demi-alternance sinusoïdale.
Le thyristor ne laisse passer le courant que dans une direction. Un second semi-
conducteur polarisé en sens contraire conduisant le courant négatif (semi-conducteur
monté tête-bêche) est donc nécessaire.
2.5
Courbes de courant lors de l’accélération
Courbes de couple

Démarrage des moteurs électriques
On différencie les démarreurs progressifs selon les deux critères suivants :
1. Nombre de phases commandées.
Une phase (démarreur progressif commandé sur une phase), deux phases (démarreur
progressif commandé sur deux phases) ou trois phases (démarreur progressif commandé
sur trois phases).
2. Types du second semi-conducteur polarisé inversement.
Si on choisit une diode, on parle alors d’un démarreur progressif commandé par demi-
alternance.
Si on choisit un thyristor, on parle alors d’un démarreur progressif commandé par
alternance complète.
Comme les différents types influencent différemment la tension et le courant, on peut
expliquer au moyen des trois schémas de principe qui suivent :
2.4.1 Démarreur progressif commandé par alternance complète sur une phase
Dans le démarreur commandé sur une phase, le découpage de phase est réalisé sur une
phase au moyen de deux thyristors placés tête-bêche (phase L2). Les phases L1 et L3
sont directement connectées au moteur.
Dans les phases L1 et L3, lors du démarrage, circule toujours un courant de 6 fois le
courant nominal du moteur. Il est possible de diminuer le courant à 3 fois le courant
nominal, seulement dans la phase commandée.
2.6
L1 L3L2
F1
Démarreur progressif
Commande sur une phase

Démarrage des moteurs électriques
En comparant cette méthode avec le démarrage direct, on constate que le temps
d’accélération est plus long mais que le courant moteur eff. n’est pas considérablement
réduit. La conséquence est que le même courant environ que pour le démarrage direct
circule à travers le moteur. Ce qui fait que le moteur s’échauffe. Comme une seule
phase est découpée, le réseau est chargé asymétriquement pendant la phase de
démarrage. Cette méthode correspond à la commutation KUSA classique.
Les démarreurs commandés sur une et deux phases sont principalement utilisés dans les
domaines de puissances allant jusqu’à 5,5 kW maximum. Ils sont seulement appropriés
pour éviter les chocs mécaniques dans le système. Le courant de démarrage du moteur à
courant alternatif n’est pas diminué avec cette méthode.
2.4.2 Démarreur progressif commandé par demi-alternance sur trois phases
Beim Dans le démarreur progressif commandé par demi-alternance sur trois phases, le
découpage de phase est appliqué sur les trois phases. Comme semi-conducteur de
puissance, un thyristor est monté tête-bêche avec une diode. Le découpage de phase se
fait donc uniquement en demi-alternance (commande par demi-alternance). Ainsi, la
tension n’est diminuée que lors de la demi-alternance, lorsque le thyristor est
conducteur. Lors de la deuxième demi-alternance, lorsque la diode est conductrice, la
tension réseau entière est appliquée au moteur.
Dans la demi-alternance non-commandée (diode) les pointes de courant sont plus
grandes que dans la demi-alternance commandée. Les oscillations harmoniques ainsi
générées entraînent un échauffement supplémentaire du moteur.
Comme les pointes de courant dans la demi-alternance non-commandée (diode) et les
oscillations harmoniques conséquentes sont critiques pour des grandes puissances, les
démarreurs progressifs commandés par demi-alternance ne sont utilisables efficacement
que jusqu’à environ 45 kW.
2.7
L1 L3L2
F1
Démarreur progressif
Commande par demi-alternance
Démarrage des moteurs électriques
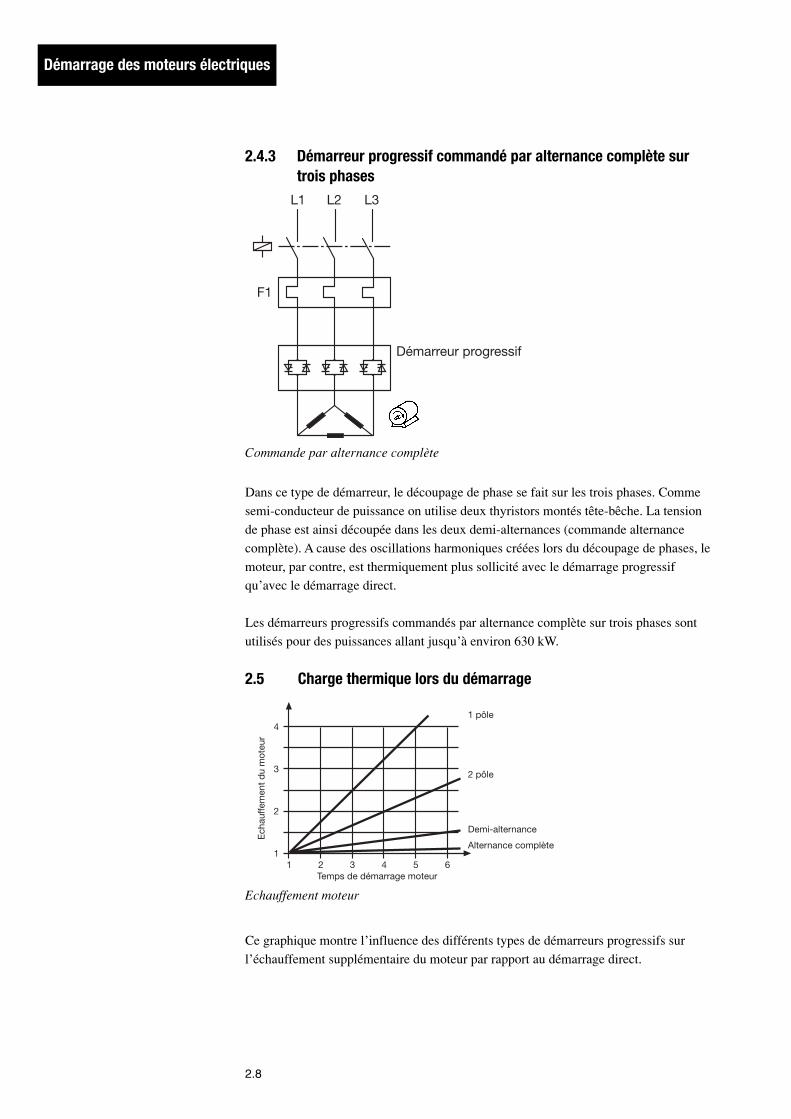
2.4.3 Démarreur progressif commandé par alternance complète surtrois phases
Dans ce type de démarreur, le découpage de phase se fait sur les trois phases. Comme
semi-conducteur de puissance on utilise deux thyristors montés tête-bêche. La tension
de phase est ainsi découpée dans les deux demi-alternances (commande alternance
complète). A cause des oscillations harmoniques créées lors du découpage de phases, le
moteur, par contre, est thermiquement plus sollicité avec le démarrage progressif
qu’avec le démarrage direct.
Les démarreurs progressifs commandés par alternance complète sur trois phases sont
utilisés pour des puissances allant jusqu’à environ 630 kW.
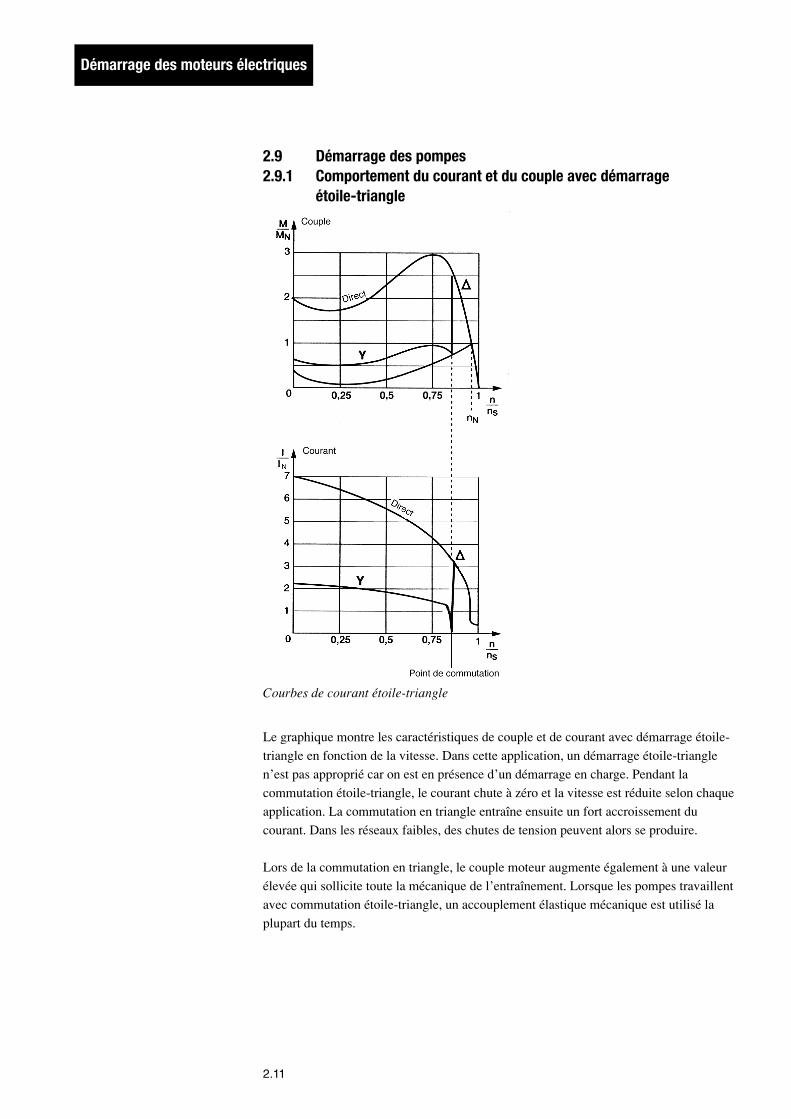
2.5 Charge thermique lors du démarrage
Ce graphique montre l’influence des différents types de démarreurs progressifs sur
l’échauffement supplémentaire du moteur par rapport au démarrage direct.
2.8
Ech
auffe
men
t d
u m
oteu
r
Temps de démarrage moteur
1 pôle
2 pôle
Demi-alternance
Alternance complète
4
3
2
11 2 3 4 5 6
Commande par alternance complète
Echauffement moteur
L1 L3L2
F1
Démarreur progressif

Démarrage des moteurs électriques
Le point 1/1 représente l’échauffement du moteur après le démarrage direct. Sur l’axe X
se trouve le coefficient de multiplication du temps de démarrage et sur l’axe Y le
coefficient de multiplication de l’échauffement du moteur. Si par exemple on double le
temps de démarrage par rapport au démarrage direct,
• l’échauffement du moteur est multiplié par 1,75 pour le démarreur progressif
commandé sur une phase
• l’échauffement du moteur est multiplié par 1,3 pour le démarreur progressif
commandé sur deux phases
• l’échauffement du moteur est multiplié par 1,1 pour le démarreur progressif
commandé par demi-alternance
• on ne constate pratiquement aucun échauffement supplémentaire pour le démarreur
progressif commandé par alternance complète
Pour des temps de démarrage plus longs et pour des grandes puissances, seul le
démarreur progressif commandé par alternance complète est applicable.
2.6 Avantages du démarreur progressif• Grâce au démarrage lent, le démarreur progressif ménage le moteur et la machine.
• Le courant de démarrage est réduit ou peut être limité.
• Le couple est adapté à la charge correspondante.
• Pour les pompes, les ondes de pression au démarrage et à l’arrêt sont évitées.
• Les mouvements de retour et les chocs pouvant perturber un processus sont évités.
• L’usure des courroies, chaînes, entraînements et paliers est diminuée.
• Grâce aux différentes possibilités de commande, l’automatisation est facilitée.
2.7 Avantages pour le client2.7.1 Avantages mécaniquesAvec un démarrage direct, le moteur développe un couple de démarrage très important.
Normalement les valeurs des couples de démarrage sont de 150 à 300% celles du couple
nominal. Selon le type de démarrage et à cause du fort couple de démarrage, la
mécanique de l’entraînement peut être sollicitée exagérément (“contrainte mécanique”),
ou bien le processus de fabrication est perturbé par des chocs et des à-coups inutiles.
• Grâce à la mise en œuvre d’un démarreur progressif, on évite les chocs subis par les
parties mécaniques de la machine.
• La caractéristique de démarrage peut être adaptée à l’utilisation (par exemple
commande de pompe).
• Câblage moteur facilité (seulement 3 conducteurs).
2.9

Démarrage des moteurs électriques
2.7.2 Avantages électriquesLe démarrage d’un moteur à courant alternatif entraîne dans le réseau des appels de
courant importants (6 à 7 fois le courant nominal). Il peut en résulter d’importantes
chutes de tension qui perturbent les autres utilisateurs connectés sur ce réseau. Les
distributeurs d’électricité imposent donc des limites pour les courants de démarrage des
moteurs.
• Avec un démarreur progressif, il est possible de limiter le courant de démarrage du
moteur, pour autant qu’un couple de démarrage élevé ne soit pas nécessaire.
• Les charges sur le réseau sont alors diminuées.
• Diminution éventuelle des frais de connexion au réseau.
• Dans de nombreux cas, une limitation du courant de démarrage est imposée par le
distributeur d’électricité; les prescriptions correspondantes sont ainsi respectées.
2.8 Possibilités de mise en œuvreLes applications types sont :
• Ponts roulants, convoyeurs, mécanismes de roulement
• Mélangeurs, moulins, broyeurs
• Pompes, compresseurs, ventilateurs
• Entraînements avec réducteurs, chaînes, courroies, accouplements
Pompes :
Grâce à une commande spéciale de pompe, il est possible d’éliminer les chocs de
pressions qui se produisent au démarrage et à l’arrêt.
Compresseurs :
Pour les compresseurs, lors d’un démarrage étoile-triangle, la vitesse peut chuter à la
commutation. Avec un démarreur progressif, on obtient un démarrage continu sans
chute de vitesse.
Moteurs monophasés :
Si on veut exploiter un moteur monophasé avec un démarreur progressif, on peut utiliser
un démarreur progressif commandé par alternance complète sur une phase.
En général :
Pour des raisons économiques, le démarreur progressif remplace avantageusement la
commutation étoile-triangle pour les entraînements de grande puissance. Avant tout,
pour les applications avec des démarrages en charge (lorsque la charge ne peut pas être
raccordée après l’accélération), il est préférable d’utiliser le démarrage progressif à la
place de la commutation étoile-triangle.
2.10
Démarrage des moteurs électriques
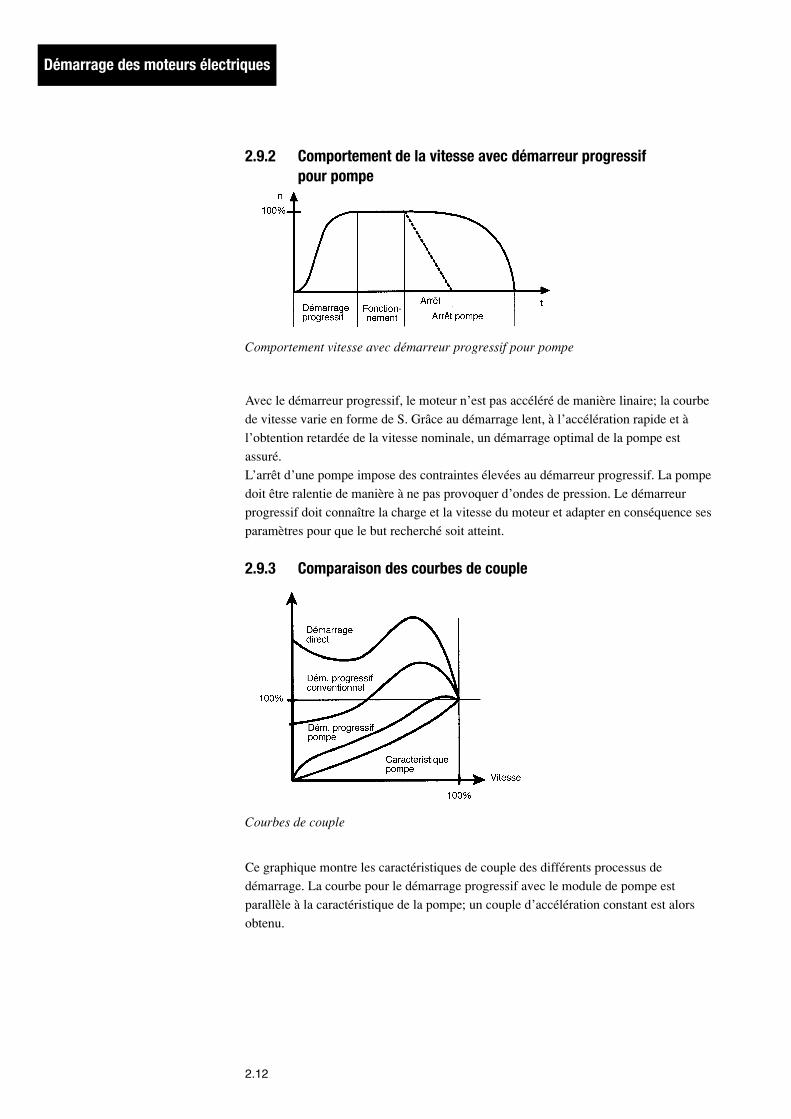
2.9 Démarrage des pompes2.9.1 Comportement du courant et du couple avec démarrage
étoile-triangle
Le graphique montre les caractéristiques de couple et de courant avec démarrage étoile-
triangle en fonction de la vitesse. Dans cette application, un démarrage étoile-triangle
n’est pas approprié car on est en présence d’un démarrage en charge. Pendant la
commutation étoile-triangle, le courant chute à zéro et la vitesse est réduite selon chaque
application. La commutation en triangle entraîne ensuite un fort accroissement du
courant. Dans les réseaux faibles, des chutes de tension peuvent alors se produire.
Lors de la commutation en triangle, le couple moteur augmente également à une valeur
élevée qui sollicite toute la mécanique de l’entraînement. Lorsque les pompes travaillent
avec commutation étoile-triangle, un accouplement élastique mécanique est utilisé la
plupart du temps.
2.11
Courbes de courant étoile-triangle
Démarrage des moteurs électriques
2.9.2 Comportement de la vitesse avec démarreur progressif pour pompe
Avec le démarreur progressif, le moteur n’est pas accéléré de manière linaire; la courbe
de vitesse varie en forme de S. Grâce au démarrage lent, à l’accélération rapide et à
l’obtention retardée de la vitesse nominale, un démarrage optimal de la pompe est
assuré.
L’arrêt d’une pompe impose des contraintes élevées au démarreur progressif. La pompe
doit être ralentie de manière à ne pas provoquer d’ondes de pression. Le démarreur
progressif doit connaître la charge et la vitesse du moteur et adapter en conséquence ses
paramètres pour que le but recherché soit atteint.
2.9.3 Comparaison des courbes de couple
Ce graphique montre les caractéristiques de couple des différents processus de
démarrage. La courbe pour le démarrage progressif avec le module de pompe est
parallèle à la caractéristique de la pompe; un couple d’accélération constant est alors
obtenu.
2.12
Comportement vitesse avec démarreur progressif pour pompe
Courbes de couple

Démarrage des moteurs électriques
2.9.4 Comportement du flux lors du démarrage
Ce graphique montre le comportement du flux lors du démarrage avec les différents
procédés de démarrage. Avec le démarrage direct, la circulation du flux est très
rapidement accélérée. Lorsque le flux atteint 100%, l’accélération varie fortement. Des
ondes de pression pouvant provoquer d’importants dommages aux installations sont
générées.
Avec le démarreur progressif conventionnel, la variation de l’accélération est beaucoup
plus faible et donc les effets sont également atténués.
C’est uniquement avec le démarreur progressif avec un module de pompe spécial, que la
variation de l’accélération est si petite qu’aucune onde de pression n’est générée.
2.9.5 Comportement du flux lors de l’arrêt
Ce graphique montre le comportement du flux lors de l’arrêt avec les différentes
méthodes d’arrêt.
2.13
Comportement du flux lors du démarrage
Comportement du flux lors de l’arrêt

Démarrage des moteurs électriques
Lors de la décélération, la pompe s’arrête immédiatement. C‘est-à-dire que toute la
colonne d’eau tombe sur le clapet de non-retour. La mécanique est alors fortement
sollicitée, comme lors du démarrage direct. L’arrêt progressif conventionnel n’est pas
approprié pour l’application avec une pompe car la vitesse du flux n’est diminuée que
jusqu’à un certain degré et le même effet qu’avec l’“accélération” se produit.
Un freinage optimal du flux ne peut être obtenu qu’avec un arrêt de pompe “régulé”.
comme pour le démarrage, il est presque plus important qu’il n’y ait aucune onde de
pression lors de l’arrêt. Le démarreur progressif doit freiner lentement le flux, freiner
ensuite plus fortement puis freiner de nouveau lentement, avant la fermeture, de manière
à ce que le flux atteigne lentement la vitesse zéro.
2.9.6 Conditions pour un démarreur progressif pour pompeEn considérant que la hauteur de la colonne d’eau et la longueur de la conduite sont
différentes pour toutes les installations, il est nécessaire de programmer le démarreur
progressif en fonction de chaque cas. Le démarrage progressif doit s’adapter à chaque
application de façon à gérer le démarrage et l’arrêt de manière optimale.
2.9.7 Domaines d’applicationLes démarreurs progressifs avec le module de pompe sont cependant utilisés dans de si
nombreux domaines que nous ne pouvons en citer ici que quelques uns :
• Alimentations en eau • Industries minières
• Installations de décantation • Installations de soutirage de raffinerie
• Brasseries / laiteries • Fabrication de papier
• Chauffages à distance • Usinage du bois
• Piscines • Technologie HLK
• Production de boissons et d’aliments
• Installations de chimie et de pétrochimie
2.10 OptionsDifférentes options sont offertes pour les démarreurs progressifs :
• Arrêt progressif
• Commande de pompe
• Cycle préalable de démarrage
• Freinage intelligent
• Arrêt en 2 phases
• Cycle préalable de positionnement avec freinage
Ces options sont décrites plus en détail dans les catalogues des produits Allen-Bradley.
2.14
Démarrage des moteurs électriques
3 Convertisseur de fréquence
3.1 GénéralitésL’industrie exige des vitesses de production toujours plus élevées et des procédés plus
efficaces sont couramment développés pour des installations de production toujours plus
performantes. Les moteurs électriques sont des éléments importants de ces installations.
Pour cette raison, différentes méthodes pour faire varier la vitesse des moteurs
asynchrones à courant alternatif ont été développées. La plupart de ces méthodes
impliquent de grandes pertes de puissance ou des investissements importants. Avec le
développement des convertisseurs de fréquence les moteurs à courant alternatif
conventionnels peuvent être utilisés avantageusement pour des vitesses variables.
Un convertisseur de fréquence est un appareil électrique qui, en transformant la
fréquence et la tension en grandeurs variables, commande la vitesse des moteurs à
courant alternatif. Le moteur peut fournir alors un couple élevé à toutes les vitesses.
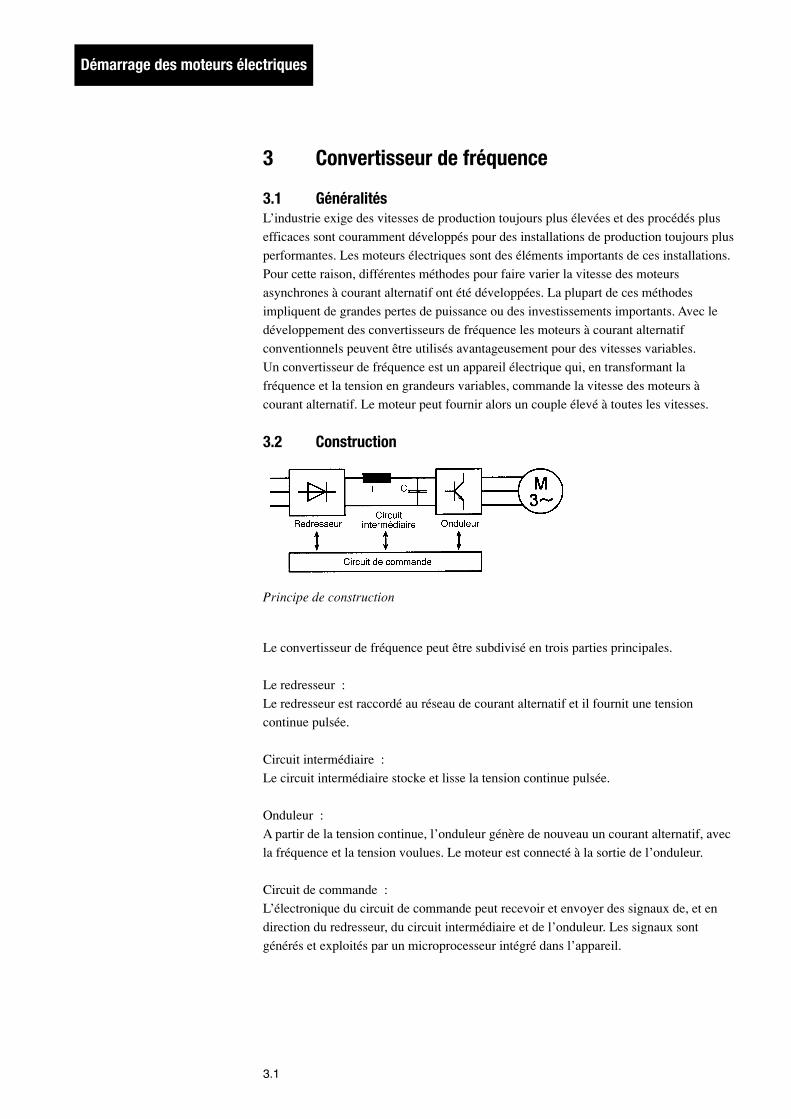
3.2 Construction
Le convertisseur de fréquence peut être subdivisé en trois parties principales.
Le redresseur :
Le redresseur est raccordé au réseau de courant alternatif et il fournit une tension
continue pulsée.
Circuit intermédiaire :
Le circuit intermédiaire stocke et lisse la tension continue pulsée.
Onduleur :
A partir de la tension continue, l’onduleur génère de nouveau un courant alternatif, avec
la fréquence et la tension voulues. Le moteur est connecté à la sortie de l’onduleur.
Circuit de commande :
L’électronique du circuit de commande peut recevoir et envoyer des signaux de, et en
direction du redresseur, du circuit intermédiaire et de l’onduleur. Les signaux sont
générés et exploités par un microprocesseur intégré dans l’appareil.
3.1
Principe de construction

Démarrage des moteurs électriques
3.2.1 Redresseur de tension réseau
Le redresseur se compose d’un circuit en pont qui redresse la tension du réseau. La
tension continue ainsi produite correspond toujours à la valeur de pointe de la tension de
réseau connectée (Ue x v √_2).
La grande différence entre un circuit en pont monophasé et un circuit en pont triphasé
est la tension continue pulsée engendrée. Dans la pratique, pour des raisons de coût, on
préfère la version monophasée pour des entraînements de petite puissance (jusqu’à
environ 2,2 kW). Pour des puissances plus importantes, cette version n’est pas
appropriée pour les raisons suivantes :
Le pont monophasé représente une charge pour le réseau.
L’ondulation de la tension continue est beaucoup plus importante que pour l’exécution
triphasée. Pour cette raison, le condensateur du circuit intermédiaire doit être plus
fortement dimensionné.
Le redresseur du convertisseur de fréquence comprend soit des diodes, soit des
thyristors. Le redresseur avec diodes est appelé un redresseur à commutation naturelle
et celui avec des thyristors, un redresseur à commutation forcée. Les ponts avec diodes
sont utilisés pour des puissances de moteur allant jusqu’à environ 22 kW.
3.2.1.1 Représentation de principe de la tension continue pulsée
3.2
Redresseurs de tension réseau
Redresseurs de tension réseau

Démarrage des moteurs électriques
3.2.2 Circuit intermédiaire
Le circuit intermédiaire peut être considéré comme un accumulateur dans lequel le
moteur puise son énergie, en passant par l’onduleur. Le condensateur C du circuit
intermédiaire stocke l’énergie côté réseau, ce qui nécessite une capacité importante. Le
moteur connecté au convertisseur de fréquence soutire l’énergie du circuit
intermédiaire, ce qui décharge partiellement le condensateur. La décharge du
condensateur ne peut se produire que si la tension du réseau est plus élevée que la
tension du circuit intermédiaire. L’énergie est ainsi tirée du réseau lorsque la tension du
réseau est au voisinage de son maximum. Des pointes de courant sont générées et elles
s’additionnent avec plusieurs convertisseurs de fréquence connectés en parallèle. Pour
cette raison, pour des puissances plus grandes (à partir d’environ 5,5 kW), une self est
montée dans le circuit intermédiaire. Cette self sert à réduire la durée de flux du courant
du côté réseau et elle diminue ainsi les pointes de courant.
3.2.3 Onduleur
L’onduleur est le dernier élément du convertisseur de fréquence avant le moteur. (Pour
des entraînements avec plusieurs moteurs, une protection supplémentaire avant le
moteur est nécessaire). Il change le courant continu en courant alternatif avec une
fréquence et une tension variables. Différents semi-conducteurs de puissance sont
utilisés : GTO (Gate Turn Off Thyristor – thyristor blocable), FET (Field Effect
3.3
Circuit intermédiaire courant continu
Onduleur IGBT

Démarrage des moteurs électriques
Transistor - transistor à effet de champ), IGBT (Insulate Gate Bipolar Transistor –
transistor bipolaire à grille isolée). Les convertisseurs de fréquence modernes sont
équipés la plupart du temps avec des transistors IGBT. La nouvelle génération de ces
semi-conducteurs permet de gérer des puissances allant jusqu’à environ 350 kW.
Comment peut-on maintenant passer d’un réseau de tension continue à un réseau de
tension alternative avec tension et fréquence variables? Les éléments de construction de
l’onduleur travaillent comme des commutateurs (commandés par microprocesseur) et
selon la fréquence, ils commutent la tension négative et la tension positive sur les
enroulements du moteurs. La variation de fréquence et de tension se fait dans la plupart
des convertisseurs de fréquence avec la modulation d’impulsions en durée MID (MLI).
3.2.3.1 Représentation de principe de la modulation d’impulsions en durée
3.3 Régimes de fonctionnement3.3.1 Relation fréquence - tension
En raccordant directement le moteur au réseau d’alimentation, on obtient les relations
de fonctionnement idéales pour le moteur. En faisant varier la tension, le convertisseur
de fréquence garantit une bonne approche de ces relations.
3.4
Modulation d’impulsions en durée
Caractéristique U/f

Démarrage des moteurs électriques
En standard, il y a une caractéristique U/f de 0 à 50 Hz, resp. 400 V. Lorsque la
fréquence augmente à plus de 50 Hz la tension n’augmente plus (tension du réseau). Le
moteur ne peut pas développer la puissance nominale et il ne peut donc plus être
sollicité à pleine charge.
Pour que la fréquence limite (normalement 50 Hz) soit plus élevée, le moteur doit être
dimensionné autrement.
230V - 50 Hz et 380 V - 87 Hz sont des rapports tension – fréquence normalisés. Le
moteur peut ainsi travailler avec la puissance nominale jusqu’à 87 Hz.
3.3.2 Accentuation de tension ou boost
La relation linéaire U/f est très mauvaise pour une petite fréquence (< 5 Hz). Le moteur
ne développe presque plus de couple, de sorte qu’il s’arrête. Pour éviter cela, il faut
appliquer une accentuation de tension ou “boost” pour des petites vitesses. Pour ce faire,
plusieurs possibilités sont à disposition de l’utilisateur selon chaque convertisseur de
fréquence:
Auto-boost :
L’accentuation de tension est déterminée par le logiciel du convertisseur de fréquence.
Ce type de boost recouvre la plus grande partie des applications.
3.5
Caractéristique U/f
Accentuation de tension

Démarrage des moteurs électriques
Boost DC :
Une tension fixe est superposée à la caractéristique U/f. Avec ce réglage, le couple
moteur maximal peut être développé. Il faut cependant observer que dans ce cas, le
courant moteur est relativement élevé.
3.3.3 Compensation du glissement
Lorsqu’un moteur asynchrone est chargé, sa vitesse diminue et le glissement augmente.
Si cette diminution de vitesse est indésirable, le convertisseur de fréquence permet une
compensation de glissement. C’est-à-dire que le convertisseur de fréquence augmente
automatiquement la fréquence de sortie de manière à ce que la vitesse ne diminue pas.
Normalement, cette compensation permet d’obtenir une précision de vitesse de l’ordre
de 0,5%.
3.3.4 Valeur de consigneLa valeur de consigne définit la fréquence de sortie et donc la vitesse du moteur. La
valeur de consigne peut être prise en compte par le convertisseur de fréquence de
différentes manières :
• au moyen d’un potentiomètre (normalement 10 kOhm)
• au moyen d’un signal analogique (0 à 10V ou 4 à 20 mA)
• au moyen d’une interface sérielle
• au moyen d’un réseau de communication
Il est également possible de programmer différentes valeurs de fréquence données dans
le convertisseur de fréquence et de les activer selon besoin au moyen d’entrées digitales.
3.3.5 CompensationDans le circuit du moteur circulent des courants réactif et actif. Le courant réactif oscille
entre la capacité du circuit intermédiaire et l’inductance du moteur et il ne charge donc
pas le réseau. Du côté réseau, seules la puissance réelle, les pertes de l’entraînement et
les pertes du convertisseur de fréquence sont tirées. Le cos phi du courant de réseau est
donc proche de 1. Dans la plupart des cas, une compensation de l’entraînement peut être
évitée.
3.6
Compensation du glissement

Démarrage des moteurs électriques
3.3.6 Protection moteurLes convertisseurs de fréquence comportent d’habitude une protection électronique de
moteur intégrée. Une protection supplémentaire n’est en principe pas nécessaire. Elle
est prévue pour des applications spéciales, comme par exemple pour un convertisseur de
fréquence alimentant plusieurs moteurs. Sur une installation appelée à travailler
régulièrement à basse vitesse, le ventilateur d’un moteur standard (monté sur l’axe du
moteur) ne garantit pas un refroidissement optimal des enroulements. Dans ce cas, un
ventilateur extérieur doit être installé. Pour une protection maximale, des sondes de
température comme par exemple des thermistors (PTC) doivent être incorporés dans les
enroulements du moteur.
3.3.7 Changement du sens de rotation et freinageComme dans un convertisseur de fréquence le champ tournant est généré
électroniquement, il suffit d’une instruction de commande pour changer le sens de
rotation.
Lorsque le moteur tourne, si la fréquence est réduite, le rotor tourne alors plus vite que
le champ tournant. Le moteur tourne en régime sur-synchrone et fonctionne comme un
générateur. De l’énergie provenant du moteur est stockée dans le circuit intermédiaire
du convertisseur de fréquence. Seule une énergie limitée peut être dissipée de sorte que
l’énergie en excès entraîne une augmentation de tension. Si la tension dépasse une
certaine valeur, le convertisseur de fréquence se met hors circuit. Pour éviter cela,
l’énergie doit être dissipée, ce qui peut être réalisé de différentes manières.
Modulateur de freinage :
L’énergie est éliminée par une résistance, au moyen de l’électronique.
Retour :
L’énergie est de nouveau stockée dans le réseau au moyen d’un onduleur séparé.
3.7
Modulateur de freinage

Démarrage des moteurs électriques
Bus courant continu:
En présence de plusieurs moteurs entraînés par des convertisseurs de fréquence dont les
circuits intermédiaires sont connectés ensemble, l’énergie restituée par le freinage des
uns est utilisée pour le fonctionnement des autres.
3.4 Avantages du convertisseur de fréquence Economie d’énergie :
L’énergie est économisée car le moteur tourne avec une vitesse correspondant à son
besoin momentané. Ceci est particulièrement valable pour les pompes et les
ventilateurs. La consommation de courant est également moindre pour une vitesse plus
faible et un couple plus élevé.
Optimisation des processus :
L’adaptation de la vitesse au processus de production apporte plusieurs avantages tels
que production efficace et utilisation optimale des installations. La vitesse peut être
adaptée de manière optimale à des conditions spéciales.
Fonctionnement souple du moteur :
Le nombre de démarrages et d’arrêts est réduit. On évite ainsi une sollicitation
importante inutile des pièces mécaniques.
Frais d’entretien réduits :
Le convertisseur de fréquence ne nécessite aucun entretien.
Environnement de travail amélioré :
La vitesse d’un convoyeur peut être adaptée à la vitesse de travail. Des démarrages et
des arrêts plus lents évitent que les produits transportés soient éjectés de la bande.
3.5 Perturbations fréquence radio3.5.1 GénéralitésTout courant et toute tension qui s’écarte de la forme sinusoïdale propre comporte des
oscillations harmoniques. Leur fréquence dépend de la raideur du gradient de courant ou
de tension.
Si, par exemple un contact est fermé, le courant augmente soudainement (avec une
pente très raide) de zéro jusqu’à la valeur nominale. Dans une radio, ceci est perçu
comme un grésillement. Une impulsion de bruit isolée n’est pas perçue comme
perturbatrice. Comme les semi-conducteurs d’un convertisseur de fréquence
fonctionnent comme des “contacts”, ces éléments envoient des tensions perturbatrices
de fréquence radio. A cause de la fréquence de commutation relativement élevée (2 à 8
kHz environ), les autres appareils électroniques sont perturbés.
3.8
Démarrage des moteurs électriques
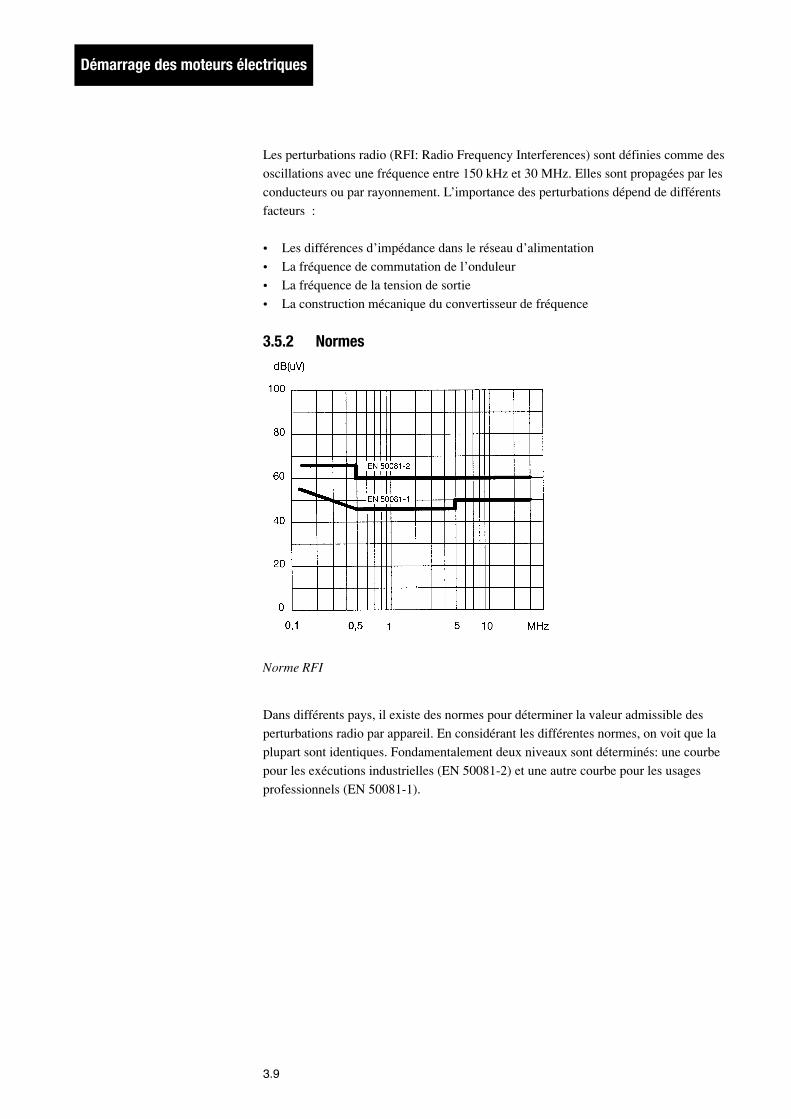
Les perturbations radio (RFI: Radio Frequency Interferences) sont définies comme des
oscillations avec une fréquence entre 150 kHz et 30 MHz. Elles sont propagées par les
conducteurs ou par rayonnement. L’importance des perturbations dépend de différents
facteurs :
• Les différences d’impédance dans le réseau d’alimentation
• La fréquence de commutation de l’onduleur
• La fréquence de la tension de sortie
• La construction mécanique du convertisseur de fréquence
3.5.2 Normes
Dans différents pays, il existe des normes pour déterminer la valeur admissible des
perturbations radio par appareil. En considérant les différentes normes, on voit que la
plupart sont identiques. Fondamentalement deux niveaux sont déterminés: une courbe
pour les exécutions industrielles (EN 50081-2) et une autre courbe pour les usages
professionnels (EN 50081-1).
3.9
Norme RFI

Démarrage des moteurs électriques
3.5.3 Mesures correctivesLes perturbations radio sont normalement véhiculées par rayonnement ou par les
conducteurs. Les mesures correctives ne sont alors efficaces que si elles sont incluses
dans les prescriptions d’installation. Il faut particulièrement faire attention au
dimensionnement du raccordement à la terre. Le convertisseur de fréquence et le filtre
doivent être fixés sur la même plaque de montage conductrice.
Rayonnement :
Si le convertisseur de fréquence est intégré dans un boîtier métallique mis à la terre, le
rayonnement ne pose alors pas de problèmes.
Conducteurs vers le convertisseur de fréquence :
Les normes strictes ne peuvent être respectées que si un filtre RFI est installé. Une
bobine de circuit intermédiaire peut cependant suffire, rendant superflu l’emploi d’un
filtre.
Câbles moteur :
Dans le câble du moteur, les perturbations radio peuvent aussi être limitées par un filtre
RFI.
Les filtres doivent cependant être relativement importants et avoir une grande puissance
de dissipation. Pour cette raison, il est habituel de limiter les perturbations radio dans les
câbles au moyen d’un blindage.
3.10
Com
para
ison
de
proc
édés
de
dém
arra
ge p
our m
oteu
rs à
cag
e no
rmal
isés
(val
eurs
type
s)
Dire
ctEt
oile
-tria
ngle
Tran
sfor
mat
eur
Impé
danc
e sé
rieM
oteu
rs s
péc.
Dém
arra
ge a
vec
com
man
de é
lect
roni
que
Proc
édé
de d
émar
rage
Dém
arra
ge d
irect
Norm
alA
tran
sitio
n Re
nfor
céDé
mar
rage
ave
cDé
mar
rage
ave
cDé
mar
rage
ave
cDé
mar
rage
Dém
arra
ge a
vec
Dém
arra
ge a
vec
ferm
éeau
totr
ansf
orm
.bo
bine
s de
sel
fré
sist
ance
sm
ulti-
vite
sses
dém
arre
ur p
rogr
essi
fco
nver
tisse
ur d
e fr
éque
nce
Rése
aufo
rtfa
ible
faib
lem
oyen
faib
le à
moy
enm
oyen
moy
enm
oyen
à fo
rtfa
ible
à m
oyen
faib
leCh
arge
lors
du
dém
arra
gepl
eine
faib
lefa
ible
moy
enne
faib
le à
moy
enne
faib
le à
moy
enne
faib
lem
oyen
ne à
ple
ine
faib
le à
moy
enne
faib
le à
moy
enne
Cour
ant d
e dé
mar
rage
I A
=I A
D=4.
..8xI
eI A
=0,
33xI
ADI A
=0,
33xI
ADI A
=~
0,5x
I AD
I A=
k2xI
ADty
p.0,
5xI A
Dty
p.0,
5xI A
DI A
=0,
5...1
xIAD
I A=
kxI A
D( t
yp.2
...6x
I e)I A
<=
1(...
2)xI
e
rela
tif l/
l edo
nné
par
(1,3
…2,
7xI e)
(1,3
…2,
7xI e)
(2…
4xI e)
(k…
pris
e;(2
…4x
I e)(2
…4x
I e)se
lon
mot
eur
(k…
coef
ficie
ntm
oteu
rty
p.80
%; 6
5%; 5
0%)
et c
omm
utat
ion
rédu
ctio
n te
nsio
n)Co
uple
de
dém
arra
ge
MAD
=1,
5...3
xMe
MA=
0,33
xMAD
MA=
0,33
xMAD
MA=
~0,
5xM
ADM
A=k2
xMAD
typ.
0,25
xMAD
typ.
0,25
xMAD
MA=
0,5.
..1xM
ADM
A=k2
xMAD
Dém
arra
ge c
omm
andé
par
rela
tif M
/Me
donn
é pa
r(0
,5…
1,0x
Me)
(0,5
–1,0
xMe)
(0,7
…1,
5xM
e)(k
…pr
ise;
(0,4
…0,
8xM
e)(0
,4…
0,8x
Me)
selo
n m
oteu
r(k
…co
effic
ient
fréqu
ence
.Cou
ple
adap
tabl
em
oteu
rty
p.80
%; 6
5%; 5
0%)
et c
omm
utat
ion
rédu
ctio
n te
nsio
n)se
lon
beso
in c
harg
eTe
mps
acc
élér
atio
n po
ur0,
2...5
s2.
..15
s2.
..15
s2.
..10
s2.
..20
s2.
..20
s2.
..20
s0,
2...1
0 s
0,5.
..10
s0,
5...1
0 s
dém
arra
ge n
orm
alTe
mps
acc
élér
atio
n po
ur5.
..30
s15
...60
s15
...60
s10
...40
s20
...60
spa
s ut
ilisé
pou
r dém
arra
ge s
évèr
e5.
..30
s10
...60
s5.
..60
sdé
mar
rage
sév
ère
1)Ca
ract
éris
tique
sFo
rte a
ccél
érat
ion
Dém
arra
ge a
vec
Com
me
étoi
le-t
riang
leCo
mm
e ét
oile
-tria
ngle
Sim
ilaire
à é
toile
Tens
ion
mot
eur (
etTe
nsio
n et
cou
ple
Cour
ant e
t cou
ple
Cara
ctér
istiq
ue d
e dé
mar
rage
Coup
le im
porta
nt d
ispo
nibl
epo
ur c
oura
ntco
uple
et c
oura
ntno
rmal
; poi
ntes
de
norm
al m
ais
cour
ant
trian
gle
mai
s sa
nsdo
nc c
oupl
e re
latif
)au
gmen
tent
moi
nsde
dém
arra
geré
glab
le.D
émar
rage
com
man
déav
ec fa
ible
cou
rant
.de
dém
arra
geré
duits
; poi
ntes
de
cour
ant e
t co
uple
et c
oupl
e de
dém
arra
gein
terr
uptio
ns d
eau
gmen
te a
vec
vite
sse
avec
vite
sse
que
pour
selo
n m
oteu
rpo
ssib
le.R
appo
rt co
uple
/cou
rant
Cara
ctér
istiq
ue d
e dé
mar
rage
élev
éco
uran
t et d
e co
uple
forte
men
t réd
uite
s lo
rsau
gmen
tés
com
mut
atio
n et
éta
ges
dém
arra
ge a
vec
et c
omm
utat
ion
rela
tivem
ent p
lus
petit
que
régl
able
lors
de
la c
omm
utat
ion
de c
omm
utat
ion
séle
ctio
nnab
les
bobi
nes
étoi
le-t
riang
leDo
mai
nes
d’ut
ilisa
tion
Entra
înem
ents
Entra
înem
ents
Com
me
étoi
le-t
riang
leEn
traîn
emen
ts a
vec
Prin
cipa
lem
ent p
ays
Entra
înem
ents
ave
cEc
onom
ique
; pou
rPr
inci
pale
men
tDé
mar
rage
s qu
i néc
essi
tent
Pr
inci
pale
men
t pou
rav
ec ré
seau
xch
argé
s se
ulem
ent
norm
al m
ais
pour
beso
in im
porta
ntan
glop
hone
s.Co
mm
eco
uple
rési
stan
tdé
mar
rage
san
s ch
arge
.po
ur fo
nctio
nnem
ent
des
varia
tions
de
coup
lefo
nctio
nnem
ent a
vec
vite
sse
forts
per
met
tant
aprè
s l’a
ccél
érat
ion
entra
înem
ents
ave
c de
cou
ple
audé
mar
rage
s ét
oile
-tria
ngle
augm
enta
nt a
vec
Avec
éta
gem
ent
dépe
ndan
t de
douc
es e
t rég
labl
esré
gula
ble.
Rem
plac
e ég
alem
ent
coup
le d
efa
ible
mas
se m
obile
et
dém
arra
gevi
tess
ede
s ré
sist
ance
sla
vite
sse
(ou
dim
inut
ions
de
cour
ant)
dém
arra
ge p
rogr
essi
f pou
rdé
mar
rage
éle
véfo
rt co
uple
rési
stan
tdo
nc fl
exib
lepe
tites
pui
ssan
ces
Démarrage des moteurs électriques
4.1 I A...
.cou
rant
dém
arra
ge m
oteu
rI A
D....
cour
ant d
émar
rage
mot
eur p
our d
émar
rage
dire
ctM
AD...
.cou
ple
dém
arra
ge p
our c
omm
utat
ion
dire
cte
I e...c
oura
nt n
omin
al d
e se
rvic
e du
mot
eur
Me.
..cou
ple
nom
inal
de
serv
ice
du m
oteu
r1)
Pos
sibl
e ju
sque
dan
s le
dom
aine
des
min
utes
Moteur, entraînement
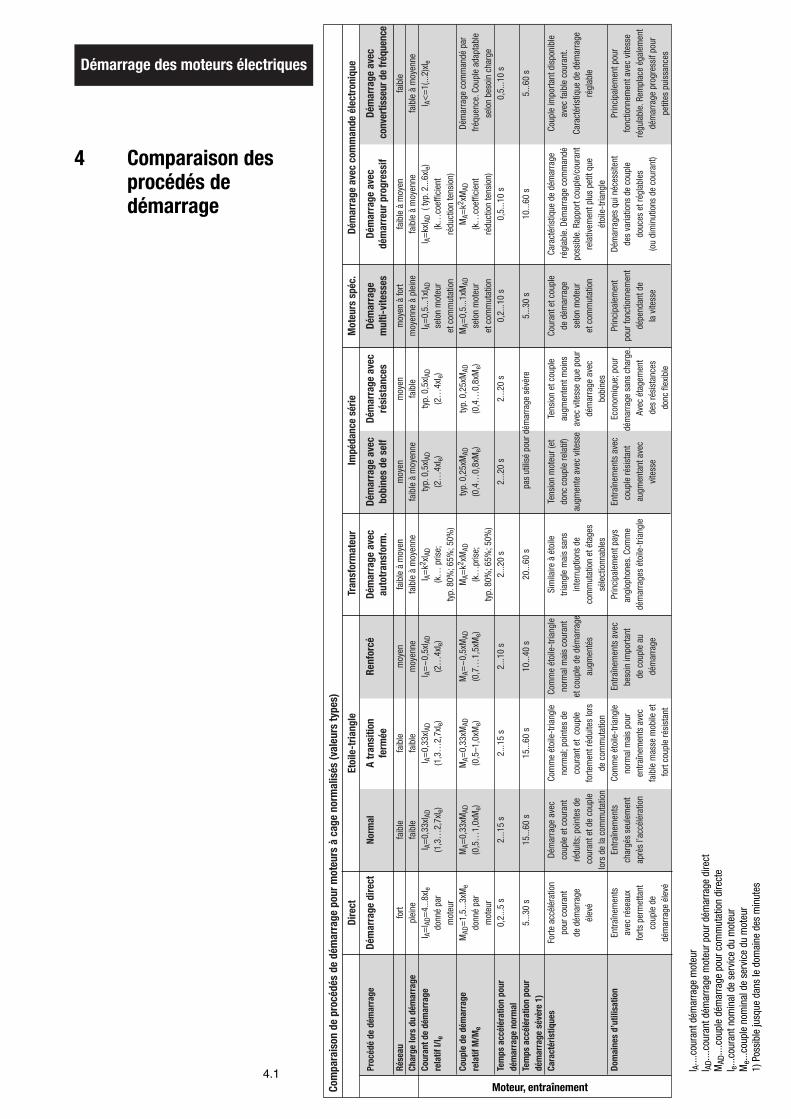
4 Comparaison des procédés de démarrage
Publication WP-Start, FR, Janvier 1998
Composants Disjoncteursbasse tension: Contacteurs et démarreurs
Protections moteursCommande de moteur centralisée (MCC)Analyseur de réseauCommutateurs et interrupteurs de chargeUnités de commande et de signalisationRelais débrochables et/ou temporisésContacteurs auxiliaires
Détecteurs Capteurs photo-électriquesDétecteurs de proximitéInterrupteurs de fin de courseRéglages de pression et de températureIdentification de fréquence radioCode à barresCodeursSystèmes de vision
Interfaces Bornes de connexionopérateurs: Systèmes de connexion pour PLC
Disjoncteurs
Commande de Variateurs c.a. et c.c.mouvement: Variateurs système
Commande numérique d’ordinateurCommande de mouvement polyvalente
Logique: Automates programmablesE / S universellesTraitement de contrôle et d’informationRelais
Produits de Réseau de contrôle d’automatmecommunication: Connectivité multivendeur (MAP)
Systèmes Systèmes de commande orientés clientapplicatifs: Contrôle par lot
Systèmes de gestion de transfertContrôle de fabrication discrète réparti Contrôle de moulage à injectionSCADASystèmes de commande de presses à estamper
Gestion qualité: Collecte et analyse de données SPC / SQC
Services de Formation techniquesupport global: Support technique et service sur site
Services de réparation et d’échange
Plus de 500’000 façons d’améliorer vos systèmes d’automatisation
Siège mondial de Rockwell Automation • 1201 South Second Street • Milwaukee, WI 53204 USA • Tél. (1) 414 382-2000 • Fax (1) 414 382-4444Siège européen de Rockwell Automation • 46, avenue Herrmann Debroux • 1160 Bruxelles, Belgique • Tél. (32)-(0) 2 663 06 00 • Fax (32)-(0) 2 663 06 40Siège Asie Pacifique de Rockwell Automation • 27/F Citicorp Centre • 18 Whitfield Road • Causeway Bay • Hong Kong • Tél. (852) 2887 4788 • Fax (852) 2508 1846World Wide Web: http://www.ab.com
France: 36 avenue de l’Europe, 78941 Vélizy Cedex, Tél. (33)-(0)1-30 67 72 00, Fax (33)-(0)1-34 65 32 33Belgique: De Kleetlaan 2b, 1831 Diegem, Tél. (32) 2 718 84 11, Fax (32) 2 725 07 24Suisse: Gewerbepark, Postfach 64, 5506 Mägenwil, Tél. (41) 62 889 77 77, Fax (41) 62 889 77 66Canada: 135 Dundas Street, Cambridge, Ontario N1R 5X1, Tél. (519) 623 18 10, Fax (519) 623 89 30
Agences régionales France –Bordeaux: 1, Allée Léonard de Vinci, 33600 Pessac, Tél 05 57 26 05 90, Fax 05 57 26 05 99Clermont-Ferrand: 158 avenue Léon Blum, 6300 Clermont-Ferrand, Tél. 04 73 28 62 64, Fax 04 73 28 62 60Lille: 4 avenue de la Marne, Immeuble Le Cartelot, 59290 Wasquehal, Tél. 03 20 89 33 00, Fax 03 20 89 33 01Lyon: Les Bureaux du Parc, 56 bd du 11 Novembre, 69160 Tassin la Demi-Lune, Tél. 04 72 38 10 00, Fax 04 78 34 59 90Nantes: 16, Impasse des Jades, 44088 Nantes Cedex 03, Tél. 02 51 89 18 00, Fax 02 51 89 90 50Strasbourg: 9A, rue du Parc – Valparc, Oberhausbergen, 67088 Strasbourg Cedex 2, Tél. 03 88 56 86 96, Fax 03 88 56 39 59
Allen-Bradley, Sprecher+Schuh, Reliance Electric, Electro-Craft, Dodge, le Cycle de Vie d’investissements en Automatisation et son symbole sont des marques commerciales de Rockwell International Corporation.


















