Normalized Cuts and Image Segmentation J. Shi and J. Malik · Indian Institute of Science,...
25
Image Registration Soma Biswas Department of Electrical Engineering, Indian Institute of Science, Bangalore.
Transcript of Normalized Cuts and Image Segmentation J. Shi and J. Malik · Indian Institute of Science,...

Image Registration
Soma Biswas
Department of Electrical Engineering,
Indian Institute of Science, Bangalore.

Definition
Registration is the determination of a geometrical
transformation that aligns points in one view of an object
with corresponding points in another view of that object
Applications:
Mosaicing: Align several images into a single
composition that represents part of a 3D scene, eg.
remote sensed images
Build 3D Model from Images
Medical Images: Combine the two registered
images by producing a reoriented version of one
view that can be “fused” with the other.
2 MR
SPECT registered

Transformation
3
Relates the position of features in two images
Rigid
translations and rotations
preserve all distances
Preserve the straightness of lines and all nonzero angles between straight lines
Affine
Also allows scaling and shearing
Preserves the straightness of lines
Allows angles between lines to change
curved
Allows the mapping of straight lines to curves
perspective
The parallelism of lines need not be preserved

Registration algorithms
4
Method used to find the transformation
Landmark based
Intensity based
Information theory based
Registration using basis functions
Registration using splines
Physics based
Elastic, Fluid, Optical flow, etc.

Point/Landmark based
5
Identifying corresponding points in the images and inferring the image transformation
Types of landmarks
Extrinsic
artificial objects attached to the patient
Intrinsic
internal anatomical structures: fiducial points,
To be reliable, they must lie in clearly discernible features, (fiducial features)
Displacement in the determination of the fiducial point - fiducial localization error (FLE).
The transformation that aligns the corresponding fiducial points will then interpolate the
mapping from these points to other points in the views
Computing the average or “centroid” of each set of points translation
Rotated this point set about the new centroid until the sum of the squared distances between each corresponding point pair is minimized

Point-based Method
6
fiducial registration error

Point-based, rigid registration
7

Point-based, registration – with scaling
8

Point-based registration: Nonisotropic scaling
9

Surface-based
10
Method
Extracting corresponding surfaces
Computing the transformation by minimizing some measure of
distance between the two surfaces
Algorithms used
The “Head and Hat” Algorithm
The Iterative Closest Point Algorithm
Registration using crest lines

Disparity Functions
Search for the transformation that minimizes some disparity function or metric
between the two surfaces X and Y
Distance between two feature sets A and B is normally defined as the minimum
distance between a point in A and a point in B
d(A,B) is small if one pair of points in these two sets are close
Hausdorff distance from A to B
11

12

13

14

ICP
15

Insights
16

Details
17
assume closest points correspond

Algorithm
18
Init the error to ∞
Calculate correspondence
Calculate alignment
Apply alignment
Update error
If error > threshold

Intensity Based Method
Calculates a transformation between two images using the pixel values alone.
Registration transformation is determined by iteratively optimizing some “similarity
measure” calculated from all pixel values.
Reference Image: A
Target Image: B is iteratively transformed to
Similarity measures are invariably calculated for the set of pixels in the overlapping
region which is a function of T and so changes with iteration
Similarity Measures: Image Subtraction
If images being registered are identical, except for misalignment
SSD = 0, for correct registration, and will increase with registration error
If A and B differ only by Gaussian noise, SSD is the optimal measure
Eg. Serial registration of MR images, images identical except for small changes due to
disease progression or response to treatment
Problems: non-gaussian noise, if small number of pixel intensity change by large
amount
19

Similarity Measure
Intensities in images A and B are linearly related, CC can be shown to the ideal
similarity measure
20

Similarity Measure
Ratio-Image Uniformity (RIU): initially devised for registration of multiple PET
images of the same subject
For each estimate of the registration transformation, a ratio image R s calculated
R: divide each pixel in A by each pixel in B’.
Uniformity determined by calculating normalized std of R
Algorithm iteratively determines the transformation T that minimizes the normalized
std, i.e. maximizes uniformity
21

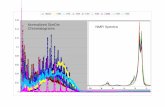
Joint Histogram
n-dim, n is the number of images used to generate it
Axis is intensity in each image
Value at each point: no. of pixels with that combination of intensities
Joint histogram normalized: estimate of joint probability distribution function (pdf) of
intensities in the n images
22

23

Joint Entropy
Shannon entropy widely used as a measure of information
Describes the average information supplied by a set of symbols {s} whose
probabilities are given by {p(s)}
If all symbols s have equal probability, then entropy will be at maximum.
If one symbol has a probability of 1 and all others have a probability of zero, then
entropy will have a minimum value.
Images correctly aligned -> joint histograms have tight clusters, surrounded by large
dark regions -> clusters disperse as the images become less well registered.
Tight clusters in the histograms represent a small number of symbols s having high
probabilities P(s) & Surrounding dark regions in the joint histogram represent
large numbers of symbols with probability zero.
- As the clusters disperse, the high intensity regions of the joint histogram become less
intense, and previously dark regions in the histograms become brighter
Misregistration results in an increase in histogram entropy.
Entropy of the PDF calculated from images A and B’ should be iteratively minimized
to register these images
24

25