
Nonlinear Control Lecture 7: Passivityele.aut.ac.ir/~abdollahi/Lec_6_N11.pdfOutline Passivity De...
26
Outline Passivity Definition L 2 and Lyapunov Stability Feedback and Passivity Theorems Nonlinear Control Lecture 7: Passivity Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Nonlinear Control Lecture 7 1/26
Transcript of Nonlinear Control Lecture 7: Passivityele.aut.ac.ir/~abdollahi/Lec_6_N11.pdfOutline Passivity De...

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Nonlinear ControlLecture 7: Passivity
Farzaneh Abdollahi
Department of Electrical Engineering
Amirkabir University of Technology
Fall 2011
Farzaneh Abdollahi Nonlinear Control Lecture 7 1/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Passivity DefinitionState Model
L2 and Lyapunov Stability
Feedback and Passivity TheoremsFeedback and L2 StabilityFeedback and A.S
Farzaneh Abdollahi Nonlinear Control Lecture 7 2/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Passivity DefinitionI Consider a memoryless function
y = h(t, u) (1)
whereI h : [0,∞)× Rp → Rp
I u: input; y : output
I Exp. Resistive element: u is voltage; y iscurrent
I It is passive if the inflow of power isalways nonneg.
I ∴ uy ≥ 0 for all (u, y)I Geometrically it means the u − y curves
lie in first and third quadrantI The simplest option is linear resistor
(u = Ry)
Farzaneh Abdollahi Nonlinear Control Lecture 7 3/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
I If u and y are vectors, the power flow onto the network will be
uT y =
p∑i=1
uiyi =
p∑i=1
uihi (u)
I For time-varying system, as long as the passivity condition is satisfied forall time, it is called passive.
I Extreme case of passivity : uT y = 0 , this system is lossless.I Input strictly passivity: if a fcn. h satisfies uT y ≥ uTφ(u), and
uTφ(u) > 0, ∀u 6= 0I since uT y = 0 only if u = 0
Farzaneh Abdollahi Nonlinear Control Lecture 7 4/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
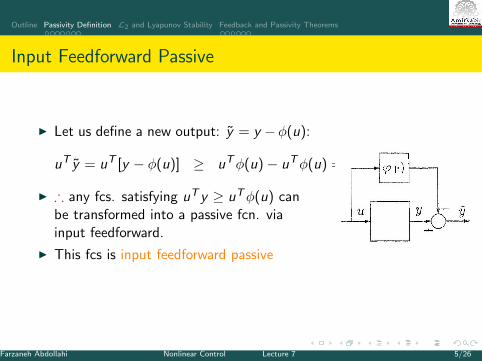
Input Feedforward Passive
I Let us define a new output: y = y −φ(u):
uT y = uT [y − φ(u)] ≥ uTφ(u)− uTφ(u) = 0
I ∴ any fcs. satisfying uT y ≥ uTφ(u) canbe transformed into a passive fcn. viainput feedforward.
I This fcs is input feedforward passive
Farzaneh Abdollahi Nonlinear Control Lecture 7 5/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Output Feedback Passive
I Suppose uT y ≥ yTρ(y).
I Let us define a new input: u = u − ρ(y):
uT y = [u − ρ(y)]T y ≥ yTρ(y)− yTρ(y) = 0
I ∴ any fcs. satisfying uT y ≥ yTρ(y) canbe transformed into a passive fcn. viaoutput feedback.
I This fcs is output feedback passiveI If yTρ(y) > 0,∀y 6= 0 the fcn. is called
output strictly passiveI since uT y = 0 only if y = 0
Farzaneh Abdollahi Nonlinear Control Lecture 7 6/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Passivity of Memoryless Fcn.
I The system y = h(t, u) isI passive if uT y ≥ 0I lossless if uT y = 0I input-feedforward passive if uT y ≥ uTφ(u) for some fcn φI input strictly passive if uT y ≥ uTφ(u) and uTφ(u) > 0,∀u 6= 0I output-feedback passive if uT y ≥ yTρ(y) for some fcn ρI output strictly passive if uT y ≥ yTρ(y) and yTρ(y) > 0,∀y 6= 0
Farzaneh Abdollahi Nonlinear Control Lecture 7 7/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
State Model
I Consider a dynamical system with state model
x = f (x , u) (2)
y = h(x , u)
I f : Rn × Rp → Rn is local lip.I h : Rn × Rp → Rp is cont.I f (0, 0) = 0 and h(0, 0) = 0I # inputs = # outputs
Farzaneh Abdollahi Nonlinear Control Lecture 7 8/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
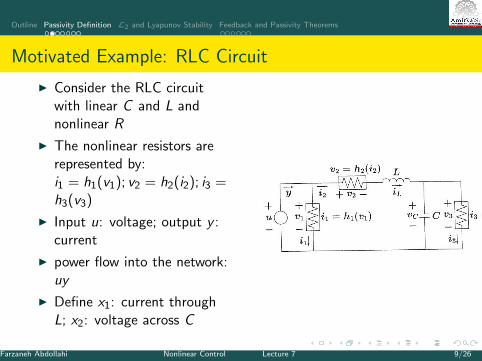
Motivated Example: RLC Circuit
I Consider the RLC circuitwith linear C and L andnonlinear R
I The nonlinear resistors arerepresented by:i1 = h1(v1); v2 = h2(i2); i3 =h3(v3)
I Input u: voltage; output y :current
I power flow into the network:uy
I Define x1: current throughL; x2: voltage across C
Farzaneh Abdollahi Nonlinear Control Lecture 7 9/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
I ∴ state modelLx1 = u − h2(x1)− x2
C x2 = x1 − h3(x2)
y = x1 + h1(u)
I The system is passive if the absorbed energy by the network is greaterthan the stored energy in the network over the same period:∫ t
0u(s)y(s)ds ≥ V (x(t))− V (x(0)) (3)
where V (x) = 1/2Lx21 + 1/2Cx2
2 : stored energy
I Strict inequality of (3) yields difference between the absorbed energy andincreased stored energy equals to dissipative energy in the resistors
I (3) hold for every t ≥ 0 for all t u(t)y(t) ≥ V (x(t), u(t))
I i.e. the power flow must be greater than or equal to the rate of change ofthe stored energy
Farzaneh Abdollahi Nonlinear Control Lecture 7 10/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Motivated Exp. Cont’dI Take the derivative of V along the system traj:
V = uy − uh1(u)− x1h2(x1)− x2h3(x2)
I ∴uy = V + uh1(u) + x1h2(x1) + x2h3(x2)
I If h1, h2 and h3 are passive ⇒uy ≥ V ; system is passiveI Otherwise
I Case 1: If h1 = h2 = h3 = 0, uy = V no energy dissipation, system islossless
I Case 2: If h2, h3 ∈ sector [0,∞] ( passive fcns.) uy ≥ V + uh1(u)I If uh1(u) > 0 for all u 6= 0 it is input strick passive (absorbed energy is
greater than increased stored energy unless u(t) ≡ 0)I If uh1(u) < 0 for some u it can be made passive by an input ff
I Case 3: If h1 = 0 and h3: passive fcn ( ∈ sector [0,∞]) uy ≥ V + yh2(y)I If yh2(y) > 0 for all y 6= 0 it is output strick passive (absorbed energy is
greater than increased stored energy unless y(t) ≡ 0)I If yh2(y) < 0 for some u it can be made passive by an output fb
Farzaneh Abdollahi Nonlinear Control Lecture 7 11/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Motivated Exp. Cont’d
I Case 4: If h1 ∈ [0,∞] and h2, h3 ∈ (0,∞)
uy ≥ V + x1h2(x1) + x2h3(x2)I where x1h2(x1) + x2h3(x2) is pos. def.I It is state strict passive or simply strick passive (absorbed energy is greater
than increased stored energy unless x(t) ≡ 0)
Farzaneh Abdollahi Nonlinear Control Lecture 7 12/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Passivity Based on State Model
I The system (2) is passive if there exist a cont. diff. p.s.d fcn V (x) (called storage fcn) s.t.
uT y ≥ V =∂V
∂xf (x , u), ∀(x , u) ∈ Rn × Rn
Moreover, it isI Lossless if uT y = VI Input-feedforward passive if uT y ≥ V + uTφ(u) for some fcn φI Input strictly passive if uT y ≥ V + uTφ(u) and uTφ(u) > 0,∀u 6= 0I Output-feedback passive if uT y ≥ V + yTρ(y) for some fcn ρI Output strictly passive if uT y ≥ V + yTρ(y) and yTρ(y) > 0,∀y 6= 0I Strictly passive if uT y ≥ V + ψ(x) for some p.d. ψ
I In all cases, the inequality should hold for all (x , u)
Farzaneh Abdollahi Nonlinear Control Lecture 7 13/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
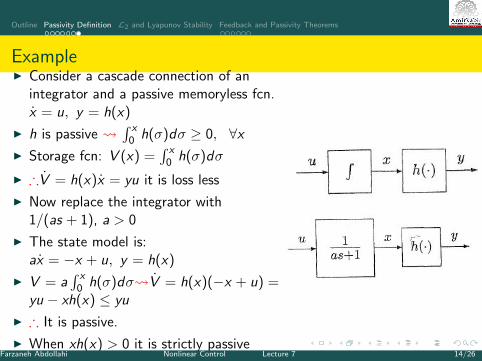
ExampleI Consider a cascade connection of an
integrator and a passive memoryless fcn.x = u, y = h(x)
I h is passive ∫ x
0 h(σ)dσ ≥ 0, ∀x
I Storage fcn: V (x) =∫ x
0 h(σ)dσ
I ∴V = h(x)x = yu it is loss less
I Now replace the integrator with1/(as + 1), a > 0
I The state model is:ax = −x + u, y = h(x)
I V = a∫ x
0 h(σ)dσ V = h(x)(−x + u) =yu − xh(x) ≤ yu
I ∴ It is passive.
I When xh(x) > 0 it is strictly passiveFarzaneh Abdollahi Nonlinear Control Lecture 7 14/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
L2 and Lyapunov Stability
I Lemma: If the system (2) is output strictly passive withuT y ≥ V + δyT y for some δ > 0 then it is finite-gain L2 stable with L2
gain less than or equal to 1/δ
I Definition: The system (2) is zero-state observable if no solution ofx = f (x , 0) can stay identically in S = {x ∈ Rn|h(x , 0) = 0} other thanthe trivial solution x(t) ≡ 0
I Example: For linear system x = Ax , y = Cx
I Observability is equivalent to y(t) = CeAtx(0) ≡ 0⇔{
x(0) = 0x(t) ≡ 0
Farzaneh Abdollahi Nonlinear Control Lecture 7 15/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
L2 and Lyapunov Stability
I Lemma: If system (2), is passive with a p.d. storage fcn. V (x), then theorigin of x = f (x , 0) is stable.
I Lemma: For system (2), the origin of x = f (x , 0) is a.s if the system isI strictly passive orI output strictly passive and zero-state observable
I Furthermore, if the storage fcn. is radially unbounded, then the origin willbe g.a.s
Farzaneh Abdollahi Nonlinear Control Lecture 7 16/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Example
I Consider SISO system
x1 = x2
x2 = −ax31 − kx2 + u
y = x2
I a > 0, k > 0
I Consider p.d. radially unbounded V (x) = (1/4)ax41 + (1/2)x2
2
I V = −ky 2 + yu
I By ρ(y) = ky , it is output strictly passive L2 f.g.s. with gain less thanor equal to 1/k
I When u = 0, y(t) ≡ 0⇒ x2 ≡ 0⇒ x1 ≡ 0 zero-state observable
I ∴ it is g.a.s
Farzaneh Abdollahi Nonlinear Control Lecture 7 17/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Feedback and Passivity Theorems
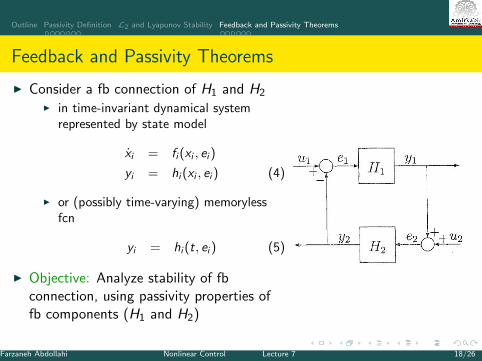
I Consider a fb connection of H1 and H2
I in time-invariant dynamical systemrepresented by state model
xi = fi (xi , ei )
yi = hi (xi , ei ) (4)
I or (possibly time-varying) memorylessfcn
yi = hi (t, ei ) (5)
I Objective: Analyze stability of fbconnection, using passivity properties offb components (H1 and H2)
Farzaneh Abdollahi Nonlinear Control Lecture 7 18/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Feedback and Passivity Theorems
1. If both components H1 and H2 are dynamical systems, the closed-loopstate model is
x = f (x , u)
y = h(x , u) (6)
I where x = [x1 x2]T , u = [u1 u2]T , y = [y1 y2]T
I Assuming fi (0, 0) = 0 and hi (0, 0) = 0 f (0, 0) = 0 and h(0, 0) = 0I Assuming fi and hi are locally lip. f and h are locally lip.
Farzaneh Abdollahi Nonlinear Control Lecture 7 19/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Feedback and Passivity Theorems
2. If H1 is a dynamical system and H2 is memoryless fcn., the closed loopstate model is
x = f (t, x , u)
y = h(t, x , u) (7)
I where x = x1, u = [u1 u2]T , y = [y1 y2]T
I Assume f (t, 0, 0) = 0 and h(t, 0, 0) = 0I Assume f is p.c. in t and locally lip. in (x , u), and h is p.c. in t and cont. in
(x , u)
3. If both components are memoryless fcnsI It can be considered as a special case when x does not exit
Farzaneh Abdollahi Nonlinear Control Lecture 7 20/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Feedback and L2 Stability
I Theorem: The feedback connection of two passive system is passiveI Proof: Let V1(x1) and V2(x2) are storage fcns of H1 and H2 respectively.I If either components are memoryless fcn, take Vi = 0I Then eT
i yi ≥ Vi
I Considering fb. connectioneT
1 y1 + eT2 y2 = (u1 − y2)T y1 + (u2 + y1)T y2 = uT
1 y1 + uT2 y2
I ∴uT y = uT1 y1 + uT
2 y2 ≥ V1 + V2 = V
I Lemma: The fb connection of two output strictly passive systems with
eTi yi ≥ Vi + δiy
Ti yi + εie
Ti ei , i = 1, 2
is finite-gain L2 stable with gain if ε1 + δ2 > 0, ε2 + δ1 > 0
Farzaneh Abdollahi Nonlinear Control Lecture 7 21/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Example
I Consider H1 :
{x = f (x) + G (x)e1
y1 = h(x)and H2 : y2 = ke2 where k > 0,
ei , yi ∈ Rp
I Suppose there is a p.d. fcn V1(x) s.t.∂V1∂x f (x) ≤ 0, ∂V1
∂x G (x) = hT (x), ∀x ∈ Rn
I Both components are passive
I and eT2 y2 = keT
2 e2 = γkeT2 e2 + (1−γ)
k yT2 y2, 0 < γ < 1
I ∴ ε1 = δ1 = 0, ε2 = γk, δ2 = (1−γ)k
I It is finite gain L2 stable
Farzaneh Abdollahi Nonlinear Control Lecture 7 22/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Feedback and A.S.
I Stability of origin is trivial if both components are passive. (Tell me why?.
I Let us focus on a.s.I Theorem: Consider fb connection of two T.I. dynamical systems of the
form (4). The origin of the closed-loop system (6) ( when u = 0) is a.s.if
I both components are strictly passiveI or both components are output strictly passive and zero-state observableI or one component is strictly passive and the other one is output strictly
passive and zero-state observable
I Furthermore, if storage fcn of each component is radially unbounded, theorigin is g.a.s
Farzaneh Abdollahi Nonlinear Control Lecture 7 23/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
ExampleI Consider fb connection with:
H1 :
x1 = x2
x2 = −ax31 − kx2 + e1
y1 = x2
, H2 :
x3 = x4
x4 = −bx3 − x34 + e2
y2 = x4
a, b, k > 0
I Use V1 = (a/4)x41 + (1/2)x2
2 V1 = −ky 21 + y1e1
I ∴ H1 is output strictly passive.
I when e1 = 0, y1 ≡ 0⇔ x2 ≡ 0⇔ x1 ≡ 0
I ∴ H1 is zero-state observable
I Use V2 = (b/2)x23 + (1/2)x2
4 V2 = −y 42 + y2e2
I ∴ H2 is output strictly passive.
I when e2 = 0, y2 ≡ 0⇔ x4 ≡ 0⇔ x3 ≡ 0
I ∴ H2 is zero-state observable
I V1,V2 are radially unbounded the closed-loop system is g.a.sFarzaneh Abdollahi Nonlinear Control Lecture 7 24/26
Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Example
I Reconsider the pervious system but change the output of H1 toy1 = x2 + e1
I Hence V1 = −k(y1 − e1)2 − e21 + y1e1 H1 is passive Not strictly
passive or output strictly passive
I Consider Lyap fcn of closed-loop sys.V = V1 + V2 = 1
4 ax41 + 1
2 x22 + 1
2 bx23 + 1
2 x24
I V = −kx22 − x4
4 − x24 ≤ 0
I Also, V = 0⇒ x2 = x4 = 0x2 ≡ 0⇒ x1 ≡ 0x4 ≡ 0⇒ x3 ≡ 0
I V is radially unbounded the closed-loop system is g.a.s
Farzaneh Abdollahi Nonlinear Control Lecture 7 25/26

Outline Passivity Definition L2 and Lyapunov Stability Feedback and Passivity Theorems
Feedback and A.S.
I Theorem: Consider fb connection of a strictly passive, T.I. dynamicalsystems of the form (4) and a passive (possibly time-varying) memorylessfcn of the form (5). The origin of the closed-loop system (7) ( whenu = 0) is u.a.s. Furthermore, if storage fcn of the dynamical system isradially unbounded, the origin is g.u.a.s
Farzaneh Abdollahi Nonlinear Control Lecture 7 26/26




![Synchronization of Nonlinear Circuits in Dynamic ...people.ece.umn.edu/~sdhople/Journals/TCAS_2014_Synch.pdfthrough Lyapunov- and passivity-based methods [3], [17]– [25]. To investigate](https://static.fdocuments.net/doc/165x107/5ed635fac11e5a5751441074/synchronization-of-nonlinear-circuits-in-dynamic-sdhoplejournalstcas2014synchpdf.jpg)













