
NONLINEAR SOLID MECHANICS FOR FINITE ELEMENT ANALYSIS: STATICS

NONLINEAR COMPUTATIONALSOLID & STRUCTURAL MECHANICS
Theoretical formulations, technologies and computationsPavia, May 5–9, 2014
Lecture 8. May 6, 2014
Inelastic constitutive behavior
at small strains
Ferdinando Auricchio
e-mail: [email protected]: http://www.unipv.it/compmech
F.Auricchio (UNIPV – IMATI) Computational inelasticity 1 / 70

Lecture goal
Lecture 8. Inelastic constitutive behavior
Inelasticity and plasticity models
Solution schemes (return map)
Integration of evolution equations
Operator split method and consistent tangent modulus
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 2 / 70

Motivations
Perform a standard traction test ... for cyclic loading-loading
⋆ Distinguish between reversible (elastic) and irreversible (inelastic region)
⋆ Threshold stress limit between the two regions
⋆ Complex response under cyclic loading ( ... up to fatigue!)
Question: how is it possible to model such effects and compute with them
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 3 / 70

Overview I
General format for inelasticity as evolutionary models
Linear visco-elasticity
Visco-plasticity
J2 plasticity
More general plasticity models
Integration algorithm
Solution algorithm
⋆ Load conditions depend on time t
⋆ Dependence on time t not explicitly stated
⋆ Small deformation regime
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 4 / 70

Introduction: elastic vs inelastic I
Elastic material: stress is function only of strain, or, equivalentlyin case of no internal constraint, strain is function only of stress
εεε = εεε(σ)
Elastic material ⇒ constitutive response independentfrom process followed in reaching actual state
Elastic assumption is clearly an approximation of real material behavior, very close insome cases, rough in other cases
Thinking of strain as dependent variable, strain may depend not only on stress atcurrent time, but also on stress path followed to reach current state
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 5 / 70

Introduction: elastic vs inelastic IIWhenever path dependence is significant, material must be regarded as inelastic
Inelastic material: strain is function not only of stress, but alsoof other quantities, in general, indicated as internal variables, ξ
εεε = εεε(σ, ξ)
Internal variables ξ: a set of scalars, tensors, or whatever needed to properlydescribe material response
Since ξ are new variables, need to introduce extra equations, internal variableconstitutive equations, for example, in rate form (!)
ξ = g(σ, ξ)
i.e., through differential equations that determine rates in time (time derivatives)
Inelastic material:
εεε = εεε(σ, ξ)
ξ = g(σ, ξ)
Note: all quantities assumed to be function of time t: εεε = εεε(t), σ = σ(t), ξ = ξ(t)
Distinguish between external or control variables (εεε,σ) and internal variables (ξ)
Two equations in three unknowns: select independent control variable
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 6 / 70

Introduction: elastic vs inelastic III
Within small deformations, additive decomposition of strain
εεε = εεεe + εεε
i
where: εεεe : elastic strain, i.e. part of strain related to stress
through elastic relation or part of strain function onlyof stress, i.e. εεεe = εεεe(σ)
εεεi : inelastic strain, i.e. difference between total andelastic strain, i.e. εεεi = εεε− εεεe
Assume inelastic strain εεεi as internal variable
ξ = εεεi ⇒
εεε = εεε(σ,εεεi )
εεεi = g(σ,εεεi )
ξ = εεεi,β ⇒
εεε = εεε(σ,εεεi ,β)
εεεi = g1(σ,εεε
i,β)
β = g2(σ,εεεi,β)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 7 / 70

Notation I
Split stress, σ, and strain, εεε, in deviatoric and volumetric components
σ = s+ pI
εεε = e +1
3θI
with
tr(s) = s : I = 0
tr(e) = e : I = 0and
p =1
3tr(σ) =
1
3σ : I
θ = tr(εεε) = εεε : I
where tr(•) : trace operator I: second rank identity tensor
Deviatoric-volumetric decomposition consistent with additive strain decomposition
εεεe = ee +
1
3θe I
εεεi = ei +
1
3θi I
and
e = ee + ei
θ = θe + θ
i
For any any second rank tensor a introduce Euclidean inner product (trace)
‖a‖ = [a : a]12 = [ tr(a · a) ] 12
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 8 / 70

Non-linear inelastic constitutive model I
Focus on a simple model
εεε = εεε(σ,εεεi )
εεεi = g(σ,εεεi)
GOAL: compute material model evolution/response under specific/generic loadingconditions (“virtual” experimental test)
Recall: all quantities assumed to be function of time t
Before computing model evolution, need to do several considerationsX Time-continuous setting: non-linear differential-algebraic eqs?? Time-discrete setting: integration in time → non-linear algebraic eqs?? Time-marching algorithm: solve non-linearity → advance in time
( discrete constitutive algorithm )
Start defining time-discrete setting
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 9 / 70
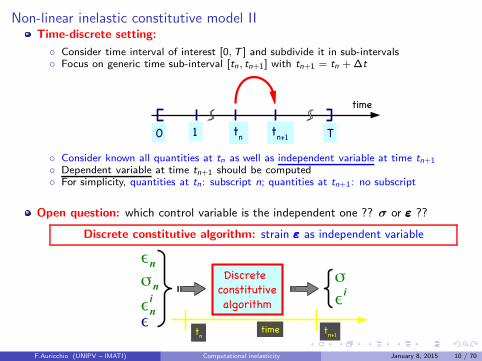
Non-linear inelastic constitutive model IITime-discrete setting:
Consider time interval of interest [0,T ] and subdivide it in sub-intervals Focus on generic time sub-interval [tn, tn+1] with tn+1 = tn +∆t
Consider known all quantities at tn as well as independent variable at time tn+1
Dependent variable at time tn+1 should be computed For simplicity, quantities at tn: subscript n; quantities at tn+1: no subscript
Open question: which control variable is the independent one ?? σ or εεε ??
Discrete constitutive algorithm: strain εεε as independent variable
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 10 / 70
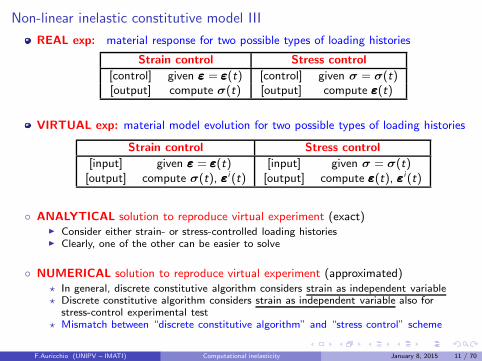
Non-linear inelastic constitutive model III
REAL exp: material response for two possible types of loading histories
Strain control Stress control
[control] given εεε = εεε(t) [control] given σ = σ(t)[output] compute σ(t) [output] compute εεε(t)
VIRTUAL exp: material model evolution for two possible types of loading histories
Strain control Stress control
[input] given εεε = εεε(t) [input] given σ = σ(t)[output] compute σ(t), εεεi (t) [output] compute εεε(t), εεεi(t)
ANALYTICAL solution to reproduce virtual experiment (exact) Consider either strain- or stress-controlled loading histories Clearly, one of the other can be easier to solve
NUMERICAL solution to reproduce virtual experiment (approximated)⋆ In general, discrete constitutive algorithm considers strain as independent variable⋆ Discrete constitutive algorithm considers strain as independent variable also for
stress-control experimental test⋆ Mismatch between “discrete constitutive algorithm” and “stress control” scheme
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 11 / 70
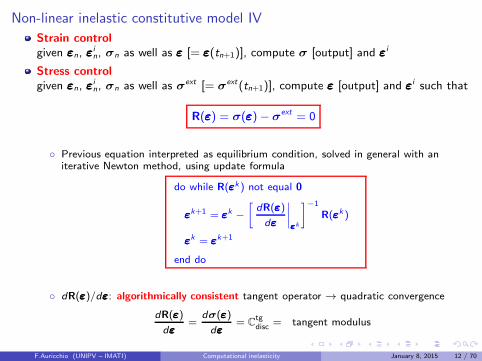
Non-linear inelastic constitutive model IV
Strain controlgiven εεεn, εεε
in, σn as well as εεε [= εεε(tn+1)], compute σ [output] and εεεi
Stress controlgiven εεεn, εεε
in, σn as well as σext [= σext(tn+1)], compute εεε [output] and εεεi such that
R(εεε) = σ(εεε)− σext = 0
Previous equation interpreted as equilibrium condition, solved in general with aniterative Newton method, using update formula
do while R(εεεk) not equal 0
εεεk+1 = εεεk −[
dR(εεε)
dεεε
∣
∣
∣
∣
εεεk
]
−1
R(εεεk)
εεεk = εεεk+1
end do
dR(εεε)/dεεε: algorithmically consistent tangent operator → quadratic convergence
dR(εεε)
dεεε=
dσ(εεε)
dεεε= C
tgdisc = tangent modulus
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 12 / 70

Non-linear inelastic constitutive model V
Compute fourth-order tangent tensor Ctgdisc, consistent (!!) with time-discrete model
dσ = Ctgdiscdεεε
Necessary in general to solve equilibrium problems
Point-wise (local) equilibrium. Assign a stress history σext(t). To compute strainhistory which produces the assigned stress history, solve equation
R(εεε) = σ(εεε)− σext = 0
where all quantities are assumed to be evaluated at time tn+1
Boundary-value (global) equilibrium. Assign a standard BVP with load and BCsvarying in time. Then at any time tn+1 solve the problem
R = Lint −Lext = 0
where Lint and Lext are respectively internal and external work with
R = Lint(εεε)− Lext =
∫
Ωδεεε : σ(εεε)dV −
∫
Ωδu : bdV = 0
and all field quantities are assumed to be evaluated at time tn+1
Concept of constitutive driver code
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 13 / 70

Non-linear inelastic constitutive model VI
To solve nonlinear residual equation R(εεε) = 0, often adopted iterative Newtonmethod
START with a tentative solution εεεk
CHECK if tentative solution εεεk is an effective solution, i.e. if R(εεεk) = 0 if YES, then exit If NOT, then UPDATE tentative solution
R(εεεk+1) ≈ 0
i.e.
R(εεεk+1) ≈ R(εεεk)+∂R
∂εεε
∣
∣
∣
∣
εεε=εεεk
(
εεεk+1 − εεεk)
= 0
hence
εεεk+1 = εεεk −[
∂R
∂εεε
]
−1
εεεk
R(εεεk)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 14 / 70

Viscoelasticity I
GOAL: develop a model showing inelastic strain evolution and rate-dependency(standard viscoelastic model)
Consider the simplest case: isotropic linear viscoelastic material
Detail model time-continuous and time-discrete version
Due to model linearity, no special algorithm needed for time-discrete approach
Address tangent tensor consistent with discrete model
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 15 / 70
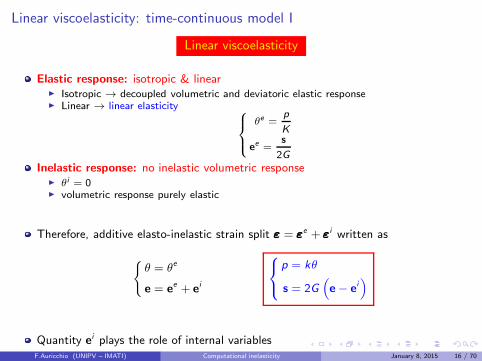
Linear viscoelasticity: time-continuous model I
Linear viscoelasticity
Elastic response: isotropic & linear Isotropic → decoupled volumetric and deviatoric elastic response Linear → linear elasticity
θe =p
K
ee =s
2G
Inelastic response: no inelastic volumetric response θi = 0 volumetric response purely elastic
Therefore, additive elasto-inelastic strain split εεε = εεεe + εεεi written as
θ = θe
e = ee + ei
p = kθ
s = 2G(
e− ei)
Quantity ei plays the role of internal variablesF.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 16 / 70

Linear viscoelasticity: time-continuous model II
As internal-variable rate-equation, assume simplest linear relation
ei =1
2ηs− 1
λei
with η: material viscosity parameter λ: internal characteristic time
Accordingly, obtain the so-called linear isotropic viscoelastic model
p = Kθ
s = 2G(e− ei )
ei =1
2ηs− 1
λei
Algebraic-differential equations
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 17 / 70

Linear viscoelasticity: time-discrete counterpart and algorithmic solution I
Goal: develop time discrete counterpart for possible computer implementation
Since model is linear, no special algorithm should be used to obtain the solution
Tangent tensor consistent with discrete model is also addressed
tn and tn+1: two time values
tn+1 > tn and tn+1 first time of interest after tn
Minimize subscript appearance (make equations more readable)
an = a(tn) , a = a(tn+1)
with a any generic quantity
⋆ Quantity evaluated at time tn: subscript n
⋆ Quantity evaluated at time tn+1: no subscript
GOAL: develop a time marching procedure
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 18 / 70

Linear viscoelasticity: time-discrete counterpart and algorithmic solution II
IDEA: compute stress history from strain history (strain driven problem) Known / given: strain εεε at time tn+1 and solution at time tn
(
σn,εεεn, ein)
Unknown / to be computed: solution at time tn+1
Backward Euler formula to integrate rate equation in time
ei =1
2ηs− 1
λei ⇒ ei − ein
∆t=
1
2ηs− 1
λei
with ∆t = tn+1 − tn
Evaluate remaining equation at tn+1
Continuous-time vs discrete-time model equations
p = Kθ
s = 2G(e− ei )
ei =1
2ηs− 1
λei
⇒
p = Kθ
s = 2G(e− ei )
ei = ein +
[
1
2ηs− 1
λei]
∆t
(1)
Note: no subscript means evaluation at tn+1, e.g., s means s = s(tn+1)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 19 / 70

Linear viscoelasticity: time-discrete counterpart and algorithmic solution III
Compute inelastic strain ei update as function of previous solution and current strain(RECALL: strain-driven process)
Combine 12 & 13
ei = α[
ein + βe]
(2)
where:
α =
[
1 +
(
2G
2η+
1
λ
)
∆t
]
−1
, β =2G
2η∆t
Compute stress update using 11 & 12 as well as updated inelastic strain
In conclusion
p = Kθ
ei = α[
ein + βe]
s = 2G(e− ei)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 20 / 70

Linear viscoelasticity: time-discrete counterpart and algorithmic solution IV
Algorithmic-consistent tangent tensor Ctgdisc
dσ = Ctgdiscdεεε
Linearize deviatoric elastic relation and inelastic strain evolution equation
s = 2G(e− ei )
ei = α[
ein + βe]
⇒
ds = 2G(de− dei )
dei = αβde
Combine previous two relations
ds =[
2G(1− αβ)II]
de
Recalling stress volumetric-deviatoric split, get in compact notation
Ctgdisc = [K(I⊗ I) + 2G(1− αβ)Idev] (3)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 21 / 70

Linear viscoelasticity: time-discrete counterpart and algorithmic solution V
Using a matrix notation
Ctgdisc =
[
K(1T1) + 2G(1− αβ)Idev
]
Recall
1 =
111000
, 1T1 =
1 1 1 0 0 01 1 1 0 0 01 1 1 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
, Idev =
2/3 −1/3 −1/3 0 0 0−1/3 2/3 −1/3 0 0 0−1/3 −1/3 2/3 0 0 00 0 0 1/2 0 00 0 0 0 1/2 00 0 0 0 0 1/2
Recall
σ = p1+ s , p =[
1T1]
σ , s = Idevσ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 22 / 70

Linear viscoelasticity: time-discrete counterpart and algorithmic solution VI
Overall time-discrete solution algorithm
Given σn,εεεn, ein and εεε
Compute en, θn and eUpdate ei [ Eq. 2 ]Update s and p
Compute σ
Compute algorithmic tangent [ Eq. 3 ]Exit
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 23 / 70

Viscoplasticity I
Viscoplasticity
Simple inelastic material model based on internal variables so far considered
εεε = εεεe(σ) + εεε
i
εεεi = g(σ,εεεi )
Visco-elasticity: g linear/non-linear
Visco-plasticity: g strongly non-linear Strongly non-linear, i.e. elastic in a certain stress range ( elastic range )
history-dependent outside that range ( inelastic range ) Formally, assume existence of a continuous function F (σ, ξ) ( yield function ) s.t.
g(σ, ξ) = 0 when F ≤ 0
g(σ, ξ) 6= 0 when F > 0
F (σ, ξ) = 0 defines yield surface in stress space F (σ, ξ) ≤ 0 defines elastic region enclosed by yield surface
Plasticity: g strongly non-linear & very slow process In the limit, plasticity is rate-independent, i.e. results are independent of loading rate
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 24 / 70

Linear viscoplasticity: time-continuous model I
Linear viscoplasticity
Internal variable rate equation (Bingham model)
ei =1
2η〈‖s‖ − σy〉 n
where η: viscosity parameter σy : parameter representing yield surface radius ‖s‖: norm of deviatoric stress, i.e. ||s|| = √
s : s =√sij : sij
< • >: Macauley bracket or positive part function defined as
< x >=
x if x ≥ 0
0 if x < 0
n: direction of stress tensor
n =s
‖s‖
ei = 0 for ‖s‖ ≤ σy , i.e. F = ‖s‖ − σy = 0 yielding condition
Piecewise linear equations ⇒ explicit integration possible in some cases
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 25 / 70

Linear viscoplasticity: time-continuous model II
Limit function F = ‖s‖ − σy (von Mises type - second stress invariant)
Time-continuous model
p = Kθ
s = 2G(e− ei )
ei =1
2η〈‖s‖ − σy 〉 n
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 26 / 70

Linear viscoplasticity: time-continuous model III
Bingham model reproduces two main features of a large class of viscoplastic models
Fast loading conditions (˙||s|| → ∞): model response is elastic
Material does not have the time to develop rate-dependent effects
Slow loading conditions (˙‖s‖ → 0+): stress norm remains constant
Classical feature of models with rate equations in the form ξ = g(σ, ξ) and with awell-defined yield function, depending on stress only
In the case of yield functions, for slow loading conditions the problem solution tends tosatisfy the yield function F = 0
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 27 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution I
Non-linear model due to the positive part function ⇒ need a special algorithm tosolve time-discrete model
IDEA: compute stress history from strain history (strain driven problem) Known / given: strain εεε at time tn+1 and solution at time tn
(
σn,εεεn, ein)
Unknown / to be computed: solution at time tn+1
Backward Euler formula to integrate rate equation
Evaluate remaining equations at time tn+1
Continuous-time vs discrete-time model equations
p = Kθ
s = 2G(e− ei )
ei =1
2η〈‖s‖ − σy〉 n
⇒
p = Kθ
s = 2G(e− ei )
ei = ein +∆t
2η〈‖s‖ − σy 〉 n
with ∆t = tn+1 − tn
System of algebraic highly non-linear equations, not easy to solve it
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 28 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution IITo solve non-linear algebraic problem consider a return map algorithm
Two-step algorithm based on elastic-predictor plastic-corrector procedure
STEP 1: compute a purely elastic trial state
STEP 2: check if trial state non-admissable,then apply inelastic correctioncomputed using trial state as initial condition
Rewrite deviatoric time-discrete problem in terms of trial state and unknown λ
s = 2G(e− ei)
ei = ein + λn
λ =∆t
2η〈‖s‖ − σy 〉
(4)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 29 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution III
Trial state: assume no inelastic deformation in [tn, tn+1]
Assume ei = ein, λ = 0
Compute elastic trial state
λTR = 0
ei,TR = ein
sTR = 2G[
e− ein
]
(5)
Check trial state: if elastic trial state (i.e. ‖sTR‖ ≤ σy ) is admissible, then trial state does not violate model trial state represents solution at tn+1 following part of algorithm can be skipped
Inelastic correction: if trial state (‖sTR‖ > σy ) is non-admissible, then trial state does violate model hence a correction should be performed
Inelastic correction: if trial step is non admissible, step is necessarily inelastic
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 30 / 70
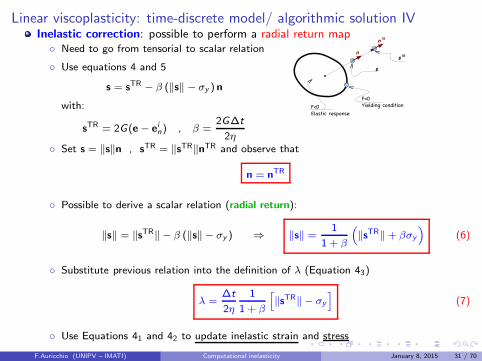
Linear viscoplasticity: time-discrete model/ algorithmic solution IVInelastic correction: possible to perform a radial return map
Need to go from tensorial to scalar relation
Use equations 4 and 5
s = sTR − β (‖s‖ − σy ) n
with:
sTR = 2G(e− ein) , β =2G∆t
2η Set s = ‖s‖n , sTR = ‖sTR‖nTR and observe that
n = nTR
Possible to derive a scalar relation (radial return):
‖s‖ = ‖sTR‖ − β (‖s‖ − σy ) ⇒ ‖s‖ =1
1 + β
(
‖sTR‖+ βσy
)
(6)
Substitute previous relation into the definition of λ (Equation 43)
λ =∆t
2η
1
1 + β
[
‖sTR‖ − σy
]
(7)
Use Equations 41 and 42 to update inelastic strain and stress
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 31 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution V
Algorithmic-consistent tangent tensor Ctgdisc
dσ = Ctgdiscdεεε
Linearize deviatoric elastic and inelastic strain evolution equations
s = 2G(e− ei )
ei = ein + λnTR
⇒
ds = 2G(de− dei )
dei = nTRdλ+ λdnTR
Linearize λ
λ =∆t
2η
1
1 + β
[
‖sTR‖ − σy
]
⇒ dλ = AdiscnTR : de
with:
Adisc =2G∆t
2η + 2G∆t
Recall
nTR =sTR
‖sTR‖ =sTR
[
(sTR : sTR)12
]
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 32 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution VI
Linearize nTR
dnTR =1
‖sTR‖[
I− (nTR ⊗ nTR)]
dsTR =N
TR
‖sTR‖dsTR
where:
NTR =
1
‖sTR‖[
I− (nTR ⊗ nTR)]
with NTR orthogonal projection on plane with unit normal nTR = n
NTRnTR = 0 and N
TRN
TR = NTR
Since dsTR = 2Gde, obtain
dnTR = 2GN
TR
‖sTR‖de
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 33 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution VII
Combining all previous relations
ds =[
2G(1− C)II + 2G (C − Adisc)(nTR ⊗ nTR)
]
de
with:
C =2Gλ
‖sTR‖
Recalling volumetric-deviatoric stress split, get algorithmic tangent tensor
Ctgdisc = K (I⊗ I) + 2G (1− C) Idev + 2G (C − Adisc)(n
TR ⊗ nTR)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 34 / 70

Linear viscoplasticity: time-discrete model/ algorithmic solution VIII
Given σn,εεεn, ein and εεε
Compute en, θn and eCompute trial state [ Eq. 5 ]Check trial stateIf ( ‖sTR‖ > σy ) then
Plastic stepCompute λ [ Eq. 7 ]Update ei [ Eq. 4 ]Update s and p [ Eq. 4 ]Compute algorithmic tangent [ Eq. 28 ]
ElseElastic step
Update s and p with trial state [ Eq. 5 ]Compute elastic tangent
End ifCompute stress σ
Exit
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 35 / 70

Classical plasticity I
Classical plasticity
Classical plasticity theory is based on blanket assumption of “rate-independent” plasticity, i.e. inelastic deformation takes place only when:
F = 0 , F = 0
the latter known as consistency condition or persistence condition
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 36 / 70

Classical plasticity II
Conventional to indicate inelastic strain as εεεp
Additive strain decomposition written as
εεε = εεεe + εεε
p
Evolution function g written through a factor γ to emphasize that it is a rate factor(though not time derivative of a state variable γ)
Internal variable ξ evolves as
ξ = γh where
γ =1
H
⟨
F
⟩
if F = 0
γ = 0 if F < 0
with
F=∂F
∂σ: σ , H = −∂F
∂ξ: h
∂F/∂σ = ∇σF : gradient of yield function
F : projection of σ on yield surface normal H > 0: material hardening
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 37 / 70

J2 classical plasticity: time-continuous model I
A simple J2 plasticity model
Model assumptions:
Isotropic linear elastic response
Accordingly
θe =p
K, ee =
s
2G
Von Mises or J2 materials
Yield function F depends only on deviatoric stress norm ‖s‖ =√2J2
Accordingly
θp = 0 , εεεp = ep
No hardening mechanisms
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 38 / 70

J2 classical plasticity: time-continuous model II
Model equations
Standard part →
p = K θ
s = 2G (e− ep)
F = ‖s‖ − σy
Novelty part →
ep = γ n
γ ≥ 0 , F ≤ 0 , γF = 0
where in the order we have
volumetric elastic relation with p pressure, θ volumetric strain, K bulk modulus
deviatoric elastic relation with G shear modulus
von Mises yield function
⋆ deviatoric plastic strain evolution (associative plasticity)
n =∂F
∂s=
s
‖s‖
⋆ Kuhn-Tucker conditions (converting plastic problem to constrained optimization one)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 39 / 70

J2 classical plasticity: time-discrete couterpart and integration algorithm I
Goal: develop time-discrete counterpart for numerical solution
Backward Euler to integrate evolutionary equation
Return map algorithm to solve non-linearity
Address elasto-plastic tangent tensor consistent with discrete algorithmic model
Let [0,T ] ⊂ R be a time interval
Focus on two time values, tn and tn+1, with tn+1 time value of interest after tn
To minimize subscript appearance (to make equations more readable)
an = a(tn) , a = a(tn+1)
→ Quantity evaluated at tn: subscript n
→ Quantity evaluated at tn+1: no subscript
GOAL: develop a time marching procedure
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 40 / 70

J2 classical plasticity: time-discrete couterpart and integration algorithm II
IDEA: compute stress history from strain history (strain driven problem)Given strain εεε at tn+1 and solution at tn (i.e. σn, εεεn, e
in), compute solution at tn+1
Backward Euler integration formula for plastic strain evolution
ep = epn + λ n with λ =
∫ tn+1
tn
γ dt
Substitute into elastic constitutive relation
s = 2G [e− epn]− 2G λ n
Continuous-time vs discrete-time model equations
ep = γ n
s = 2G [e− ep ]
F = ‖s‖ − σy
γ ≥ 0 , F ≤ 0 , γF = 0
⇒
ep = epn + λn
s = 2G [e− epn ] + 2Gλn
F = ‖s‖ − σy
λ ≥ 0 , F ≤ 0 , λF = 0
⋆ λ and n are unknown quantities to be computed by return map algorithm
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 41 / 70
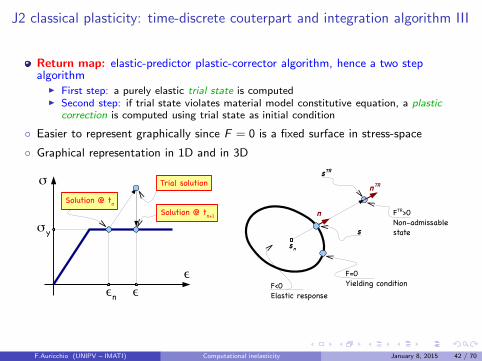
J2 classical plasticity: time-discrete couterpart and integration algorithm III
Return map: elastic-predictor plastic-corrector algorithm, hence a two stepalgorithm
First step: a purely elastic trial state is computed Second step: if trial state violates material model constitutive equation, a plastic
correction is computed using trial state as initial condition
Easier to represent graphically since F = 0 is a fixed surface in stress-space
Graphical representation in 1D and in 3D
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 42 / 70

J2 classical plasticity: time-discrete couterpart and integration algorithm IVTrial state: assume no plastic deformation in [tn, tn+1]
Assume ep = epn, λ = 0 Compute elastic trial state
λTR = 0
ep,TR = epn
sTR = 2G [e− epn ]
(8)
Check trial state: if elastic trial state (i.e. ‖sTR‖ ≤ σy ) is admissible, then trial state does not violate model trial state represents solution at tn+1 following part of algorithm can be skipped
Plastic correction: if trial state (‖sTR‖ > σy) is non-admissible, then trial state does violate model hence a correction should be performed enforce limit equation to compute discrete plastic rate λ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 43 / 70

Discrete plastic parameter and plastic rate parameter I
Plastic correction: enforce limit equation F = 0 to compute discrete plastic rate λ Express elastic relation and plastic evolution in terms of trial state and λ
ep = epn + λn
s = 2G [e− epn ] + 2Gλn⇒
ep = ep,TR + λn
s = sTR − 2G λ n
Last relation implies n = nTR hence a scalar relation may be derived
‖s‖ = ‖sTR‖ − 2Gλ
Discrete form of limit equation can be enforced
F = ‖s‖ − σy = 0 ⇒ F =[
‖sTR‖ − 2Gλ]
− σy = 0
Discrete form of limit equation can be solved for λ
λLP =‖sTR‖ − σy
2G
Discrete plastic rate parameter λ computed solving a scalar equation
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 44 / 70

Discrete plastic parameter and plastic rate parameter II
Closest point projection of trial state onto limit surface F = 0 reduces to radialprojection
n = nTR
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 45 / 70

Discrete elasto-plastic tangent tensor I
Algorithmic-consistent tangent tensor Ddisc
⋆ Use of a consistent tangent tensor preserves quadratic convergence of a Newtonmethod, for example within incremental solution in a finite element scheme
⋆ Almost identical to visco-plasticity
Linearize deviatoric elastic and inelastic strain evolution
s = 2G(e− ep)
ep = epn + λnTR
⇒
ds = 2G(de− dep)
dep = nTRdλ+ λdnTR
Linearize sTR, ‖sTR‖, λ
sTR = 2G (e− epn)
‖sTR‖ =√sTR : sTR
λ =‖sTR‖ − σy
2G
⇒
dsTR = 2Gde
d‖sTR‖ =sTR
‖sTR‖ : dsTR
dλ =d‖sTR‖2G
dsTR = 2Gde
d‖sTR‖ = 2GnTR : de
dλ = nTR : de
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 46 / 70
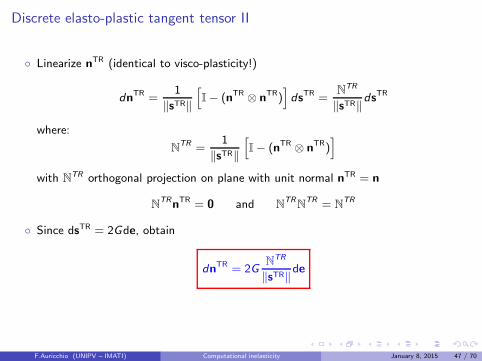
Discrete elasto-plastic tangent tensor II
Linearize nTR (identical to visco-plasticity!)
dnTR =1
‖sTR‖[
I− (nTR ⊗ nTR)]
dsTR =N
TR
‖sTR‖dsTR
where:
NTR =
1
‖sTR‖[
I− (nTR ⊗ nTR)]
with NTR orthogonal projection on plane with unit normal nTR = n
NTRnTR = 0 and N
TRN
TR = NTR
Since dsTR = 2Gde, obtain
dnTR = 2GN
TR
‖sTR‖de
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 47 / 70

Discrete elasto-plastic tangent tensor III
Accordingly, deviatoric elastic relation can be recast as follows
ds = 2G[
I− C NTR]
de− 2GnTRdλ
where:
C =2Gλ
‖sTR‖ Assume linearization of discrete limit equation in the form
dλ = Adisc[nTR : de]
with Adisc a scalar quantity (for LP Adisc = 1)
Accordingly, deviatoric elastic relation simplifies to
ds = 2G[
I− C NTR − Adisc
(
nTR ⊗ nTR)]
de
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 48 / 70

Discrete elasto-plastic tangent tensor IV
Combine with incremental elastic volumetric relation and obtain
dσ = Ddiscdεεε
Algorithmic elasto-plastic tangent tensor given by
Ddisc = K (I⊗ I) + 2G (1− C) Idev + 2G (C − Adisc)(n⊗ n)
⋆ Ddisc consistent with discrete model
⋆ Ddisc symmetric
⋆ Ddisc = Dcont when C LP = 0 or when load step reduces to zero
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 49 / 70

A slightly more general plasticity model I
Complexity of material response under cyclic conditions
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 50 / 70

A slightly more general plasticity model II
Lemaitre-Chaboche, Mechanics of Solid Materials, Cambridge University Press, 1990
Besson, Cailletaud, Chaboche, Forest, Non-Linear Mechanics of Materials Springer, 2010
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 51 / 70
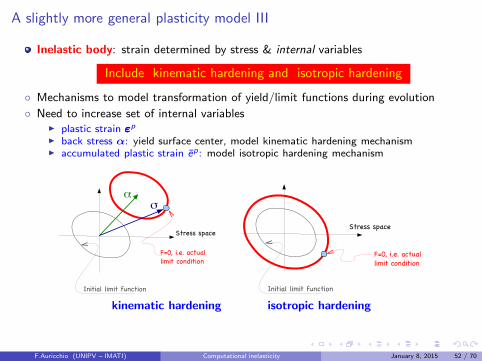
A slightly more general plasticity model III
Inelastic body: strain determined by stress & internal variables
Include kinematic hardening and isotropic hardening
Mechanisms to model transformation of yield/limit functions during evolution
Need to increase set of internal variables plastic strain εεεp
back stress α: yield surface center, model kinematic hardening mechanism accumulated plastic strain ep: model isotropic hardening mechanism
kinematic hardening isotropic hardening
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 52 / 70

J2 plasticity with linear hardening: time-continuous model I
A J2 plasticity model with simple (linear!) hardening
Model assumptions:
Isotropic linear elastic response
Accordingly
θe =p
K, ee =
s
2G
Von Mises or J2 materials
Yield function F depends only on deviatoric stress norm ‖s‖ =√2J2
Accordingly
θp = 0 , εεεp = ep
Simple hardening mechanisms
Linear kinematic Linear isotropic
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 53 / 70

J2 plasticity with linear hardening: time-continuous model II
Model equations
p = K θ
s = 2G (e− ep)
ep = γ n
Σ = s−α
α = Hkinep = Hkinγn
F = ‖Σ‖ − σy (ep)
σy(ep) = σy,0 + Hiso e
p
˙ep = ‖ep‖ = γ
γ ≥ 0 , F ≤ 0 , γF = 0
⋆ Still associative plasticity, in fact deviatoric plastic strain evolution
n =∂F
∂σ=
∂F
∂Σ=
Σ
‖Σ‖
Two new internal variable: back stress α and accumulative plastic strain ep
von Mises yield function now expressed in terms of the relative stress Σ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 54 / 70

Linear hardening J2 plasticity: time-discrete and integration algorithm I
Goal: develop time-discrete counterpart for numerical solution
Backward Euler to integrate evolutionary equation
Return map algorithm to solve non-linearity
Address elasto-plastic tangent tensor consistent with discrete algorithmic model
Let [0,T ] ⊂ R be a time interval
Focus on two time values, tn and tn+1, with tn+1 time value of interest after tn
To minimize subscript appearance (to make equations more readable)
an = a(tn) , a = a(tn+1)
→ Quantity evaluated at tn: subscript n
→ Quantity evaluated at tn+1: no subscript
GOAL: develop a time marching procedure
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 55 / 70
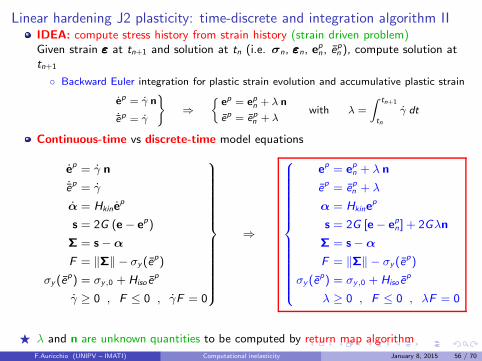
Linear hardening J2 plasticity: time-discrete and integration algorithm IIIDEA: compute stress history from strain history (strain driven problem)Given strain εεε at tn+1 and solution at tn (i.e. σn, εεεn, e
pn , e
pn ), compute solution at
tn+1
Backward Euler integration for plastic strain evolution and accumulative plastic strain
ep = γ n
˙ep = γ
⇒
ep = epn + λ n
ep = epn + λwith λ =
∫ tn+1
tn
γ dt
Continuous-time vs discrete-time model equations
ep = γ n
˙ep = γ
α = Hkinep
s = 2G (e− ep)
Σ = s−α
F = ‖Σ‖ − σy (ep)
σy (ep) = σy,0 + Hiso e
p
γ ≥ 0 , F ≤ 0 , γF = 0
⇒
ep = epn + λ n
ep = e
pn + λ
α = Hkinep
s = 2G [e− epn ] + 2Gλn
Σ = s−α
F = ‖Σ‖ − σy(ep)
σy (ep) = σy,0 + Hiso e
p
λ ≥ 0 , F ≤ 0 , λF = 0
⋆ λ and n are unknown quantities to be computed by return map algorithm
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 56 / 70

Linear hardening J2 plasticity: time-discrete and integration algorithm III
Return map: elastic-predictor plastic-corrector algorithm, hence a two stepalgorithm
First step: a purely elastic trial state is computed Second step: if trial state violates material model constitutive equation, a plastic
correction is computed using trial state as initial condition
Easier to represent graphically since F = 0 is a fixed surface in stress-space
Graphical representation in 1D and in 3D
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 57 / 70
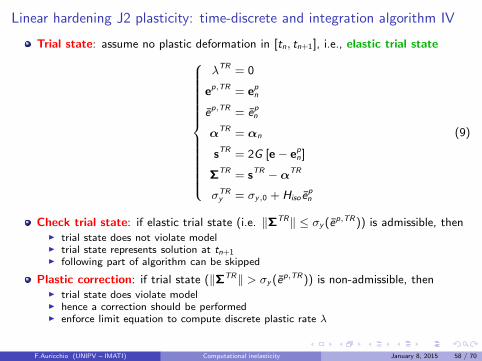
Linear hardening J2 plasticity: time-discrete and integration algorithm IV
Trial state: assume no plastic deformation in [tn, tn+1], i.e., elastic trial state
λTR = 0
ep,TR = epn
ep,TR = e
pn
αTR = αn
sTR = 2G [e− epn]
ΣTR = sTR −αTR
σTRy = σy,0 + Hiso e
pn
(9)
Check trial state: if elastic trial state (i.e. ‖ΣTR‖ ≤ σy (ep,TR)) is admissible, then
trial state does not violate model trial state represents solution at tn+1 following part of algorithm can be skipped
Plastic correction: if trial state (‖ΣTR‖ > σy (ep,TR)) is non-admissible, then
trial state does violate model hence a correction should be performed enforce limit equation to compute discrete plastic rate λ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 58 / 70

Discrete plastic parameter and plastic rate parameter I
Plastic correction: enforce limit equation F = 0 to compute discrete plastic rate λ Express elastic relation and plastic evolution in terms of trial state and λ
ep = epn + λn
s = 2G [e− epn] + 2Gλn
Σ = s−α
σy (ep) = σy,0 + Hiso e
p
⇒
ep = ep,TR + λn
s = sTR − 2G λ n
Σ = ΣTR − (2G + Hkin) λn
σy (ep) = σTR
y + Hisoλ
Last relation implies n = nTR hence a scalar relation may be derived
‖Σ‖ = ‖ΣTR‖ − (2G + Hkin)λ
Discrete form of limit equation can be enforced
F = ‖Σ‖ − σy = 0 ⇒ F =[
‖ΣTR‖ − (2G + Hkin)λ]
−(
σTRy + Hisoλ
)
= 0
Discrete form of limit equation can be solved for λ
λLP =‖ΣTR‖ − σTR
y
2G + Hiso + Hkin
Discrete plastic rate parameter λ computed solving a scalar equation
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 59 / 70

Discrete elasto-plastic tangent tensor I
Algorithmic-consistent tangent tensor Ddisc
⋆ Use of a consistent tangent tensor preserves quadratic convergence of a Newtonmethod, for example within incremental solution in a finite element scheme
⋆ Almost identical to visco-plasticity
Linearize deviatoric elastic and inelastic strain evolution
s = 2G(e− ep)
ep = epn + λnTR
⇒
ds = 2G(de− dep)
dep = nTRdλ+ λdnTR
We need to linearize nTR and λ
To linearize nTR, we need to linearize ΣTR , ‖ΣTR‖, λ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 60 / 70

Discrete elasto-plastic tangent tensor II
Linearize ΣTR , ‖ΣTR‖, λ
sTR = 2G (e− epn)
‖ΣTR‖ =√
ΣTR : ΣTR
λ =‖ΣTR‖ − σy
2G + Hiso + Hkin
dsTR = 2Gde
d‖ΣTR‖ =ΣTR
‖ΣTR‖: dΣTR
dλ =1
2G + Hiso + Hkin
(
d‖ΣTR‖ − dσTRy
)
dsTR = 2Gde
d‖ΣTR‖ = 2GnTR : de
dλ = AdiscnTR : de
with Adisc =2G
2G + Hiso + Hkin
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 61 / 70

Discrete elasto-plastic tangent tensor III
Linearize nTR (identical to visco-plasticity!)
dnTR =1
‖ΣTR‖
[
I− (nTR ⊗ nTR)]
dΣTR =N
TR
‖ΣTR‖dΣTR
where:
NTR =
1
‖ΣTR‖
[
I− (nTR ⊗ nTR)]
with NTR orthogonal projection on plane with unit normal nTR = n
NTRnTR = 0 and N
TRN
TR = NTR
Since dΣTR = dsTR = 2Gde, obtain
dnTR = 2GN
TR
‖ΣTR‖de
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 62 / 70

Discrete elasto-plastic tangent tensor IV
Accordingly, deviatoric elastic relation can be recast as follows
ds = 2G[
I− C NTR]
de− 2GnTRdλ
where:
C =2Gλ
‖ΣTR‖ Assume linearization of discrete limit equation in the form
dλ = Adisc[nTR : de]
with Adisc a scalar quantity
Accordingly, deviatoric elastic relation simplifies to
ds = 2G[
I− C NTR − Adisc
(
nTR ⊗ nTR)]
de
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 63 / 70
Discrete elasto-plastic tangent tensor V
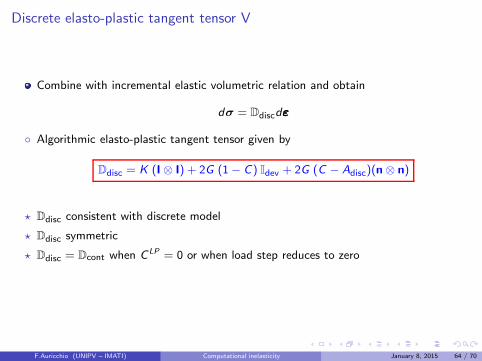
Combine with incremental elastic volumetric relation and obtain
dσ = Ddiscdεεε
Algorithmic elasto-plastic tangent tensor given by
Ddisc = K (I⊗ I) + 2G (1− C) Idev + 2G (C − Adisc)(n⊗ n)
⋆ Ddisc consistent with discrete model
⋆ Ddisc symmetric
⋆ Ddisc = Dcont when C LP = 0 or when load step reduces to zero
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 64 / 70

A more general plasticity model: time-continuous scheme I
A more general plasticity model
Model equations:
εεε = εεεe(σ) + εεε
p
εεεe = εεε
e(σ)
F = f (σ)− σy
εεεp = γ
∂F
∂σ
γ ≥ 0 , F ≤ 0 , γF = 0
Model assumptions:
Additive strain decomposition
General elastic response
General yield function F
Associative flow rule
No hardening mechanisms
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 65 / 70

A more general plasticity model: time-continuous scheme II
Integration in time: standard backward Euler
εεε = εεεe(σ) + εεε
p
εεεe = εεε
e(σ)
F = f (σ)− σy
εεεp = γ
∂F
∂σ
γ ≥ 0 , F ≤ 0 , γF = 0
⇒
εεε = εεεe(σ) + εεε
p
εεεe = εεε
e(σ)
F = f (σ)− σy
εεεp = εεε
pn + λ
∂F
∂σ
λ ≥ 0 , F ≤ 0 , λF = 0
Solution algorithm: standard predictor-corrector (return map!)
Interesting to explore the plastic correction
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 66 / 70
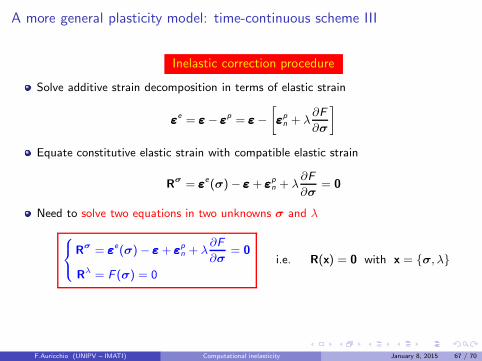
A more general plasticity model: time-continuous scheme III
Inelastic correction procedure
Solve additive strain decomposition in terms of elastic strain
εεεe = εεε− εεε
p = εεε−[
εεεpn + λ
∂F
∂σ
]
Equate constitutive elastic strain with compatible elastic strain
Rσ = εεεe(σ)− εεε+ εεε
pn + λ
∂F
∂σ= 0
Need to solve two equations in two unknowns σ and λ
Rσ = εεεe(σ)− εεε+ εεε
pn + λ
∂F
∂σ= 0
Rλ = F (σ) = 0
i.e. R(x) = 0 with x = σ, λ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 67 / 70

A more general plasticity model: time-continuous scheme IV
In general, non-linear system solved using some iterative method, e.g., Newton
R(xi+1) = 0 ⇒ R(xi ) +∂R
∂x
∣
∣
∣
∣
∣
i
∆x = 0
∂R
∂x= Ktg =
∂Rσ
∂σ
∂Rσ
∂λ
∂Rλ
∂σ
∂Rλ
∂λ
=
Del,tg + λ
∂2F
∂σ2
∂F
∂σ(
∂F
∂σ
)T
0
with Del,tg =
∂εεεe
∂σ
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 68 / 70

A more general plasticity model: time-continuous scheme V
Time-discrete consistent tangent
Linearize residual
R(x,εεε) = R(σ, λ,εεε) = 0 ⇒ dR =∂R
∂xdx+
∂R
∂εεεdεεε = 0
Solve wrt dx
dx = −[
∂R
∂x
]
−1∂R
∂εεεdεεε
Note that
Ktg =∂R
∂xand
∂R
∂εεε=
I
0
x =
σ
λ
Accordingly
∂σ
∂εεε=
([
∂R
∂x
]
−1)
11
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 69 / 70

Bibliography I
O.C. Zienkiewicz, R.L. Taylor, D.D. Fox, The Finite Element Method for Solid and Structural Mechanics.
Butterworth-Heinemann (2014)
J.C. Simo and T.J.R. Hughes, Computational inelasticity. Springer-Verlag (1998)
J.C. Simo, Topics on the numerical analysis and simulation of plasticity. In P. Ciarlet and J. Lions (Eds.),Handbook of numerical analysis, Volume III. Elsevier Science Publisher B.V. (1999)
E.A. de Souza Neto, D Peric, DRJ Owen, Computational methods for plasticity: theory and applications.Wiley (2008)
F.Auricchio (UNIPV – IMATI) Computational inelasticity January 8, 2015 70 / 70


















