NKS-331, SemUnaRS – Seminar on Unmanned Radiometric Systems · SemUnaRS – Seminar on Unmanned...
32
NKS-331 ISBN 978-87-7893-412-3 SemUnaRS – Seminar on Unmanned Radiometric Systems Magnus Gårdestig 1 Roy Pöllänen 2 Thomas Bandur Aleksandersen 3 1 Department of Medical Radiation Physics, Department of Medical and Health Sciences, Linköping University, Linköping, Sweden 2 STUK − Radiation and Nuclear Safety Authority, Finland 3 Norwegian Radiation Protection Authority February 2015
Transcript of NKS-331, SemUnaRS – Seminar on Unmanned Radiometric Systems · SemUnaRS – Seminar on Unmanned...
NKS-331 ISBN 978-87-7893-412-3
SemUnaRS –
Seminar on Unmanned Radiometric Systems
Magnus Gårdestig1
Roy Pöllänen2
Thomas Bandur Aleksandersen3
1Department of Medical Radiation Physics, Department of Medical and Health Sciences, Linköping University, Linköping, Sweden
2STUK − Radiation and Nuclear Safety Authority, Finland
3Norwegian Radiation Protection Authority
February 2015

Abstract There are several scenarios related to ionizing radiation or the release of radioac-tive materials where the use of unmanned vehicles certainly reduce the risk of receiving high doses to the personnel performing measurements. Other advan-tages are low costs of the equipment, operation, maintenance and services. The seminar on unmanned radiometric systems was held in October 2014. The seminar was dedicated to presentations on the status of unmanned mobile measurement capacities in the Nordic countries. An introduction to the topic of unmanned measurements covered some examples on systems of unmanned aerial, rotary and fixed wing, systems as well as ground based systems. A short description was given on the work of ERNCIP. Linköping University presented their considerations on their ongoing develop-ment of unmanned gamma-ray spectrometry systems and presented their rotary wing and fixed wing platforms developed by Claes Meijer. STUK presented their experience to develop radiation monitoring instrumentation to unmanned aerial vehicles. A set of radiation detectors and a sampling unit was mounted to a mid-size Ranger military UAV. A lightweight sampler and a gamma-ray detector was installed to a small-size fixed-wing UAV. Extensive tests were done for both set of instruments. On the second day of the seminar there was time scheduled for open discussions on the way forward for Nordic collaborations regarding unmanned mobile meas-urements. The seminar revealed that the Nordic capacities of unmanned mobile measure-ments are diverse, but no country has a system operating today. Each country have different strategies on how to meet this demand; university research, mili-tary collaboration or procuring turn-key systems. There is a need for continued and concerted activities to strengthen the Nordic knowledge and capacities in the field of unmanned mobile measurements. Key words Unmanned mobile measurements, UAS, UAV, air sampling, emergency prepar-edness NKS-331 ISBN 978-87-7893-412-3 Electronic report, February 2015 NKS Secretariat P.O. Box 49 DK - 4000 Roskilde, Denmark Phone +45 4677 4041 www.nks.org e-mail [email protected]

SemUnaRS – Seminar on Unmanned Radiometric Systems
Final Report from the NKS-B SemUnaRS (Contract: AFT/B(14)9)
Magnus Gårdestig1
Roy Pöllänen2
Thomas Bandur Aleksandersen3
1Department of Medical Radiation Physics, Department of Medical and Health Sciences,
Linköping University, Linköping, Sweden. 2STUK Radiation and Nuclear Safety Authority, Finland
3Norwegian Radiation Protection Authority

Table of contents
Page
Abstract i
Disclaimer ii
Acknowledgement ii
Introduction 1
The seminar 1
Discussions 2
Conclusions 4
References 4
Appendix 1. Seminar programme 5
Appendix 2. Abstracts 7
Appendix 3. Seminar participants 23

i
Abstract
There are several scenarios related to ionizing radiation or the release of radioactive materials
where the use of unmanned vehicles certainly reduce the risk of receiving high doses to the
personnel performing measurements. Other advantages are low costs of the equipment,
operation, maintenance and services.
The seminar on unmanned radiometric systems was held in October 2014. The seminar was
dedicated to presentations on the status of unmanned mobile measurement capacities in the
Nordic countries.
An introduction to the topic of unmanned measurements covered some examples on systems
of unmanned aerial, rotary and fixed wing, systems as well as ground based systems. A short
description was given on the work of ERNCIP.
Linköping University presented their considerations on their ongoing development of
unmanned gamma-ray spectrometry systems and presented their rotary wing and fixed wing
platforms developed by Claes Meijer.
STUK presented their experience to develop radiation monitoring instrumentation to
unmanned aerial vehicles. A set of radiation detectors and a sampling unit was mounted to a
mid-size Ranger military UAV. A lightweight sampler and a gamma-ray detector was
installed to a small-size fixed-wing UAV. Extensive tests were done for both set of
instruments.
On the second day of the seminar there was time scheduled for open discussions on the way
forward for Nordic collaborations regarding unmanned mobile measurements.
The seminar revealed that the Nordic capacities of unmanned mobile measurements are
diverse, but no country has a system operating today. Each country have different strategies
on how to meet this demand; university research, military collaboration or procuring turn-key
systems.
There is a need for continued and concerted activities to strengthen the Nordic knowledge and
capacities in the field of unmanned mobile measurements.

ii
Disclaimer
The views expressed in this document remain the responsibility of the author(s) and do not
necessarily reflect those of NKS. In particular, neither NKS nor any other organization or
body supporting NKS activities can be held responsible for the material presented in this
report.
Acknowledgements
NKS conveys its gratitude to all organizations and persons who by means of financial support
or contributions in kind have made the work presented in this report possible.

1
Introduction
There are several scenarios related to ionizing radiation or the release of radioactive materials
that may cause severe consequences to individuals or to the environment. Among these are for
example severe nuclear reactor accidents, such as happened in Chernobyl and Fukushima, the
use of radiological dispersal devices, RDDs, to throw off radioactive materials into the
environment or searching highly radioactive materials out of regulatory control, MORC. In
these cases the use of unmanned (aerial) vehicles certainly reduce the risk of receiving high
doses to the personnel performing the measurements. Other advantages are low costs of the
equipment, operation, maintenance and services.
Radioactive plume tracking, sampling of airborne materials, fallout mapping, location and
manipulation of highly-radioactive point sources (MORC or RDD) on the ground, underwater
source finding etc. are the areas in which unmanned vehicles may provide substantial benefits
compared to manned vehicles. During recent years there has been a substantial development
especially in unmanned aerial vehicles. The possibility of using miniaturized equipment and
development of aviation legislation have led to a variety of platforms. In addition, modern
data transfer technologies will open up novel possibilities in radiation surveillance.
The seminar
The seminar on unmanned radiometric systems was held at Vårdnäs stiftsgård in Linköping,
Sweden, October 2nd
and 3rd
of 2014. The seminar was dedicated to presentations on the status
of unmanned mobile measurement capacities in the Nordic countries. Unmanned mobile
measurements is still in research state and there is little published in scientific literature
beyond feasibility studies.
The seminar was the start-up and an inventory of the capacities for unmanned mobile
measurements in the Nordic countries. The seminar hosted discussions on different
approaches to utilize unmanned platforms, aircraft regulations and the collaborations between
universities and the authorities.
An introduction to the topic of unmanned measurements was held by Magnus Gårdestig,
Linköping University, Sweden, covering some examples on systems of unmanned aerial,
rotary and fixed wing, systems as well as ground based systems. A short description was
given on the work of the thematic group on Radiological and Nuclear threats to critical
infrastructure under the European Reference Network for Critical Infrastructure Protection,
ERNCIP.
Linköping University presented their considerations on their ongoing development of
unmanned gamma-ray spectrometry systems and presented their rotary wing and fixed wing
platforms developed by Claes Meijer. Claes Meijer presented a review of the concept of
unmanned aircraft systems.
Radiation and Nuclear Safety Authority of Finland (STUK) presented their experience to
develop radiation monitoring instrumentation to unmanned aerial vehicles, UAVs. Two types
of platforms were used for the payload: A set of radiation detectors and a sampling unit was
mounted to a mid-size Ranger military UAV. A lightweight sampler and a gamma-ray
detector was installed to a small-size fixed-wing UAV. Extensive tests were done for both set
of instruments.

2
Peder Kock, SSM, Sweden presented an exercise on mobile measurements of a simulated
nuclear fall-out held outside Lund, Sweden 29th
of September to 2nd
of October 2014.
Two fields were contaminated with 18
F and 99m
Tc, the activity concentration being in the
order of 1 MBq/m2. The surface activities were assessed by eight field teams with HPGe-
spectrometers calibrated for in-situ measurements. Combined, the teams used three different
calibrations. Assessments within 30% were acceptable. The in-situ measurements were
compared to grass and soil samples.
Mobile measurements were performed with cars on large simulated fall-out areas.
The abstracts are in Appendix 2.
Discussions
On the second day of the seminar there was time scheduled for open discussions on the way
forward for Nordic collaborations regarding unmanned mobile measurements.
There is a funding opportunity from the European Commission in the Horizon 2020
programme, section Fight against crime and Terrorism, topic FCT-3-2015: Forensics topic 3:
Mobile, remotely controlled technologies to examine a crime scene in case of an accident or a
terrorist attack involving CBRNE materials (Horizon 2020, 2015), that is applicable for the
topic. The participants of the seminar find this interesting, but concluded that, at this stage,
there is no possibility to make any contribution to a call in this context.
The purpose of the SemUnaRS activity is to stimulate the planning process for the Nordic
countries’ development of unmanned aircraft radiometric systems, UARS. Future activities
and proposals to NKS were discussed and the seminar concluded to propose to NKS the next
step in the Nordic activities on unmanned mobile radiometric systems.
The seminar strongly agreed on the need of ongoing collaboration to facilitate development of
unmanned capacities in the Nordic countries. The seminar therefore assigned Magnus
Gårdestig, Linköping University, Sweden, as a coordinator to write the NKS-B proposal RUN
– Roadmap for Unmanned Aircraft Radiometric Systems in the Nordic countries.
The aim is that the roadmap will assist Nordic Radiation Protection Authorities in their long-
term strategy planning.
The questions to be resolved and reach consensus about is e.g.:
Which RN scenarios would be solved with Unmanned Aircraft Radiometric Systems,
UARS? Why is this needed?
What is the expected impact on existing organizations?
Which are the critical parameters to be met?
Which platforms, detection systems and personnel competencies are necessary to
provide these capacities?
How will these capacities be tested?
Who will develop, use and maintain these capacities?
When could these capacities be available?
Which aircraft regulations needs to be considered?
Which standards are adequate? Data formats. Integration to reachback systems
(remote expert support).

3
How could cross border assistance be arranged?
What sampling requirements need to be met? E.g. gaseous or particulates, real-time
monitoring of the sample.
Beside gamma-ray spectrometry, is there a need to measure n- and β-fields?
Other possible detection technologies?
What planning, presentation and analysis software need to be developed?
The outcome of the activity is the roadmap which could be implemented by the Nordic
countries in concerted actions according to their resources. The continuation of the Nordic
collaboration is a joint exercise of these implementations.
The end goal of all these activities is a strengthened Nordic RN preparedness with the
capacities of unmanned measurements and sampling.
The development of the roadmap
The roadmap development will be divided into editing sessions with an intermediate open
seminar with possible demonstrations. The proposers represent university, authority and
contingency agency. The workgroup will also invite the Nordic defense forces, police and
other important stakeholders. All of these categories from the Nordic countries will be invited
to the open seminar.
Stakeholders will be invited to the seminar where the outline of the roadmap will be presented
and discussed. The roadmap draft will be sent to the authorities in the Nordic countries for
comments. The outcome of the activity is the roadmap document which each Nordic country,
or in collaboration, could implement in practice according to their resources.
Building an informal network of stakeholders, scientists, authorities and young scientists in
the area of interest is of importance for the Nordic radiation protection community.

4
Conclusions
The SemUnaRS seminar revealed that the Nordic capacities of unmanned mobile
measurements are diverse among the Nordic countries, but no country has an operating
system today. Each country have different strategies on how to meet this demand; university
research, military collaboration or procuring turn-key systems.
There is a need for continued and concerted activities to strengthen the Nordic knowledge and
capacities in the field of unmanned mobile measurements.
References
Horizon 2020, (2015): Forensics topic 3: Mobile, remotely controlled technologies to
examine a crime scene in case of an accident or a terrorist attack involving CBRNE materials.
R. a. Innovation. European Commission, European Commission. H2020-FCT-2015.
5
Appendix 1 Seminar programme
Day 1 Thursday 2nd
October
Time Title of presentation Presenter
12- Registration
12:00-13:00 Lunch
13:00-13:15 Opening of the seminar Magnus Gårdestig
Tour de Table, introduction of
participants/institutions
All
Scope and Agenda of the Meeting Magnus Gårdestig
NKS introduction Kasper Andersen
14:00-14:30 Introduction to the field and information on the
ERNCIP thematic group on Radiological
Threats to Critical Infrastructure
Magnus Gårdestig
14:30-15:00 Development of radiation surveillance
equipment in STUK for unmanned aerial
vehicles
Roy Pöllänen
Coffee break
15:30 Considerations in the development of small
UARS – Unmanned Aircraft Radiometric
Systems
Magnus Gårdestig
16:00 Unmanned Aircraft Systems Claes Meijer

6
Day 2 Friday 3rd
October
Time Title of presentation Presenter
07:00- Breakfast
09:00 Operational considerations regarding the use of
unmanned vehicles for radiation surveillance in
Finland
Petri Smolander
Preliminary conclusions from the LÄRMÄT -14
exercise
Peder Kock
10:00 Coffee break
Open discussions All
Future NKS Proposals
Horizon 2020, FCT-3-2015: Forensics topic 3:
Mobile, remotely controlled technologies to
examine a crime scene in case of an accident or a
terrorist attack involving CBRNE materials
12:00-12:30 Closing of the seminar Magnus Gårdestig
12:30 Lunch
Departures

7
Appendix 2 Abstracts
Introduction to the field and information on the ERNCIP thematic group on RN
Threats to Critical Infrastructure
Magnus Gårdestig
Department of Medical Radiation Physics, Department of Medical and Health Sciences,
Linköping University, Linköping, Sweden. [email protected]
Introduction
RN preparedness and measurements capacities have evolved based on the major incidents that
have occurred; Three Mile Island 1979 emphasized the preparedness around the NPPs,
Chernobyl 1986 gave new insights that it could grow to a global concern quite rapidly, the
attack on World Trade Center 2001 increased the preparedness for malevolent actions while
Fukushima-Daiichi 2011 once again set the focus on nuclear emissions. Over the years,
incidents with orphan sources, so called MORC, radioactive Material out of Regulatory
Control, have occurred and placed great demands on measurements capacities. The RN
preparedness appears to be incident-driven.
Unmanned measurements
There are several measurement and sampling scenarios that may constitute very high risks for
humans to carry out, e.g. reactor accidents, such as Chernobyl and Fukushima, RDDs
(radiological dispersal devices) before and after explosion, search of MORC, or search inside
buildings that are under the threat of collapsing. Other scenarios call for dull and time
consuming measurements like ground dispersion mapping. For these scenarios remote
controlled radiation measurements and sampling using unmanned aircraft systems need to be
developed.
When forensic considerations are necessary, unmanned measurements could have less risk of
cross contamination. Cover materials of the vehicle need to be easily decontaminated or
replaced.
General considerations related to unmanned measurements depend on which quantity is
measured (dose rate, cps, energy spectra), and if the data is transmitted or only stored locally.
Gain stabilization of spectrometer is important, since conditions may change rapidly during
the flight (thermal insulation of detector module could be considered). The nature of the
mission decides on the optimal detector size, or multiple sizes and/or multiple types of
detectors. Hence, limitations in payload set the preferred tasks for the systems.
The system’s tolerance to weather conditions sets how many days per year it is usable. There
could be a need for operation in darkness.
Automatic analysis of data, e.g. source localization, assessment of activity or surface
concentration or autonomous tracking of release plume or nuclide specific activity
concentrations in air etc. could be done onboard or by the control station when having two-
way communication.
In the last years, several light weight (50-500 g) spectrometers have been developed and
offered to the market. CZT and CsI seem to be the detection materials of choice in this
category. When using scintillation spectrometers, NaI, LaBr e.g., when able to carry a payload
over 1000 g, several PMT base MCA are offered. They have a different set of features, e.g.
list mode acquisition and weight. A 100 g lighter MCA give room for more battery power and
hence operating time.

8
Wireless communication between the RW and the ground station is crucial and the range
could be increased by using other RWs as relays in a mesh network (Hening, Baumgartner et
al. 2013). Sampling using RW could be done with the use of manipulators1 (Hooper 2014,
Hunt, Mitzalis et al. 2014) and air or dust sampling could be done to track and map release
plumes (Kosmatka, Hong et al. 2011).
The precision in position determination, in particular the altitude, is crucial in the calculation
of the source activities or surface activities. Therefore any precision enhancement system is
welcome. Differential GPS or RTK, Real Time Kinematics, have been used and has
developed to affordable systems with redundancy. Precision down to inch level is possible.
MDA obsession
There have been a trend for the measurements systems in the hunt for low MDA, Minimum
Detectable Activity, requiring large detectors. But in the high dose rate scenarios large
detectors tend to overflow the electronics and thus require longer distances, whilst smaller
detectors could operate in higher dose rate conditions. Given unmanned carriers the detectors
could come closer for lower MDA if necessary.
Unmanned Aircraft Systems
Unmanned Aircraft System, UAS, an expansion of UAV, Unmanned Aerial Vehicle, is a
common concept for remotely piloted or autonomous operated aircraft including control
system, whilst the term drone is more common for armed and military unmanned aircraft.
Recently, the concept RPAS, remotely piloted aerial systems, have, mainly in the hobbyist
community, complemented UAS and emphasizes less on the autonomy.
Rotary wing
Rotary wing UAS (RW) is different from Fixed wing UAS (FW) in the following aspects:
RW operates more directly in 3D (3 dimensions).
RW can hover.
RW have the ability to descend closer to the source and reduce the distance and extend
the measurement time and hence reduce the MDA (Minimum Detectable Activity).
RW are more complicated to use as air samplers since the air flow is more fluctuating.
RW has relatively shorter operating endurance and payload capacities.
RW is relatively more sensitive to weather conditions.
RW can be separated in two main categories; heavy, petrol driven, helicopters that are under
stricter regulations and lighter, electrically driven, tri-, quad-, hexa- or octocopters that are
easier accessible.
The variety of innovative RW platforms is infinite and opens the possibilities to find an
ultimate RW for any application. An overview of 132 different UAS and research on the
platform can be found in Cai, Dias et al. 2014.
There are several examples of feasibility studies that a light enough detector-battery
combination could be carried by a RW and perform measurements (Bogatov, Mazny et al.
2013, Bristol 2013, MacFarlane, Payton et al. 2014) and illustrate the usability of RW as
1 http://youtu.be/DyAvbq8o7xI

9
radiation measurement platform (Okuyama, Torii et al. 2005, 2008, Gårdestig and Pettersson
2011, 2012, Reavis 2011, Towler, Krawiec et al. 2012, Han, Xu et al. 2013).
Fixed wing
Unmanned aerial fixed wing vehicles range from micro-UAVs with a 15 cm wingspan and a
payload capacity of a few grams to wingspan of 35 m and a payload capacity of 2000 kg.
Endurance, operational range and flight altitude comparable to, or even better than,
conventional aircraft are available. Many manufacturers offer payloads for NBC (nuclear,
biological, chemical) reconnaissance. Information about these payloads is, however, very
limited and usually not published.
RN-payloads include capabilities for sampling and radiation spectrometry. Real-time link to
operation control is important.
Air sampling
Air contamination can be gaseous or aerosol particles which decide your air sampling method.
Particulate sampling should be isokinetic. This should be valid throughout the relevant air
speed range. The optimal sample volume depends on the activity concentration.
In many cases on-line monitoring of sampling would be useful. Ability to link the results from
the on-line spectrometry and the off-line analysis of samples would be important.
Capability to start and stop sampling during the flight would also be useful.
STUK has developed an air sampler for mounting on a mini-UAV and it collects airborne
radioactive particles (Perajarvi, Lehtinen et al. 2008). The minimum detectable concentrations
of several transuranium nuclides are ~ 0.3 Bq/m3 or less using direct alpha spectrometry. This
information can be obtained within 2 h from the beginning of the sampling.
Unmanned Ground Systems
Unmanned ground systems can operate in areas with high radiation or danger of explosives
(e.g. BLEVE: boiling liquid expanding vapor explosion or IED, improvised explosive
device), in collapsing structures, booby trap, heat etc.
Unmanned ground systems have the ability to take samples by swiping and to manipulate the
environment on long-time surveys in contaminated areas, probing i n problematic
environments and conditions, monitor the movements of a threat and provide real-time data
from multiple mobile sensor sources. (Rohling, Bruggemann et al. 2009, Schneider and
Wildermuth 2011, Schneider, Welle et al. 2012)
For actuation and navigation there are laser systems for scanning the environment with a laser
scanner to plan collision free trajectories.
ERNCIP
The ERNCIP Office (European Reference Network for Critical Infrastructure Protection) has
established a thematic group on Radiological and Nuclear Threats to critical infrastructure
(RN Thematic Group) (ERNCIP) which looks at issues such as certification of radiation
detectors, standardization of deployment protocols, response procedures and communication
to the public, e.g. in the event of criminal or unauthorized acts involving nuclear or other
radioactive material out of regulatory control.
The RN Thematic Group works with the following three issues:

10
1. List-mode data acquisition based on digital electronics. Time-stamped list-mode data
format produces significant added value compared to the more conventional spectrum
data format. It improves source localization, allows signal-to-noise optimization, noise
filtering, with some new gamma and neutron detectors actually requiring list-mode
data to function. The list-mode approach also allows precise time synchronization of
multiple detectors enabling simultaneous singles and coincidence spectrometry such as
singles gamma and UV-gated gamma spectrometry.
2. Expert support of field teams, i.e. data moves instead of people and samples. Fast and
high quality response can be achieved with less people. Optimal formats and protocols
are needed for efficient communication between frontline officers and reachback
center.
3. Remotely controlled radiation measurements and sampling using unmanned vehicles.
There are several measurement and sampling scenarios that are too risky for humans to
carry out. Applications envisaged are: reactor and other accidents, dirty bombs before
and after explosion, search of nuclear and other radioactive material out of regulatory
control.
References
Bogatov, S., N. Mazny, A. Pugachev, S. Tkachenko and A. Shvedov (2013). Emergency
radiation survey device onboard the UAV." Int. Arch. Photogramm. Remote Sens. Spatial Inf.
Sci. XL-1/W2: 51-53.
Bristol, U. (2013). First flight for radiation detector, Press release from
http://www.bristol.ac.uk/news/2013/9819.html
Cai, G., J. Dias and L. Seneviratne (2014). A Survey of Small-Scale Unmanned Aerial
Vehicles: Recent Advances and Future Development Trends. Unmanned Systems 02(02):
175-199.
ERNCIP. Radiological and Nuclear Threats to Critical Infrastructure, ERNCIP. https://erncip-
project.jrc.ec.europa.eu/networks/tgs/nuclear
Gårdestig, M. and H. B. L. Pettersson (2011). RadiaCopter – UAS Gamma Spectrometry for
Detection and Identification of Radioactive Sources. NSFS Conference, Reykjavik.
Gårdestig, M. and H. B. L. Pettersson (2012). RadiaCopter – UAS Gamma spectrometry for
detection and identification of radioactive sources. IRPA13 the 13th International Congress of
the International Radiation Protection Association, Glasgow.
Han, J., Y. Xu, L. Di and Y. Chen (2013). Low-cost Multi-UAV Technologies for Contour
Mapping of Nuclear Radiation Field. Journal of Intelligent & Robotic Systems 70(1-4): 401-
410.
Hening, S., J. Baumgartner, M. Teodorescu, N. Nguyen, T. and C. Ippolito, A. (2013).
Distributed Sampling Using Small Unmanned Aerial Vehicles (UAVs) for Scientific
Missions. AIAA Infotech@Aerospace (I@A) Conference, American Institute of Aeronautics
and Astronautics.

11
Hooper, R. (2014). Drone squirts foam to clean up nuclear waste. New Scientist 222(2968):
21-21.
Hunt, G., F. Mitzalis, T. Alhinai, P. A. Hooper and M. Kovac (2014). 3D printing with flying
robots. Robotics and Automation (ICRA), 2014 IEEE International Conference on.
Kosmatka, J. B., T. S. Hong, M. Lega and G. Persechino (2011). Air Quality Plume
Characterization and Tracking using small unmanned aircraft. 2011 National Air Quality
Conferences, San Diego, California, USA.
MacFarlane, J. W., O. D. Payton, A. C. Keatley, G. P. T. Scott, H. Pullin, R. A. Crane, M.
Smilion, I. Popescu, V. Curlea and T. B. Scott (2014). Lightweight aerial vehicles for
monitoring, assessment and mapping of radiation anomalies. Journal of Environmental
Radioactivity 136(0): 127-130.
Okuyama, S.-i., T. Torii, A. Suzuki, M. Shibuya and N. Miyazaki (2008). A Remote
Radiation Monitoring System Using an Autonomous Unmanned Helicopter for Nuclear
Emergencies. Journal of Nuclear Science and Technology 45(sup5): 414-416.
Okuyama, S., T. Torii, Y. Nawa, I. Kinoshita, A. Suzuki, M. Shibuya and N. Miyazaki
(2005). Development of a remote radiation monitoring system using unmanned helicopter.
International Congress Series 1276: 422-423.
Perajarvi, K., J. Lehtinen, R. Pollanen and H. Toivonen (2008). Design of an air sampler for a
small unmanned aerial vehicle. Radiat Prot Dosimetry 132(3): 328-333.
Reavis, B. (2011). Honeywell T-Hawk Aids Fukushima Daiichi Disaster Recovery
Pressrelease Retrieved 2014-12-10, 2014, from
http://honeywell.com/News/Pages/Honeywell-T-Hawk-Aids-Fukushima-Daiichi-Disaster-
Recovery.aspx .
Rohling, T., B. Bruggemann, F. Hoeller and F. E. Schneider (2009). CBRNE hazard detection
with an Unmanned vehicle. 2009 IEEE International Workshop on Safety, Security & Rescue
Robotics (SSRR), vol., no., pp.1,5, 3-6 Nov. 2009, doi: 10.1109/SSRR.2009.5424155
Schneider, F. E., J. Welle, D. Wildermuth and M. Ducke (2012). Unmanned multi-robot
CBRNE reconnaissance with mobile manipulation System description and technical
validation. 13th International Carpathian Control Conference (ICCC), pp.637,642, 28-31 May
2012, doi: 10.1109/CarpathianCC.2012.6228724
Schneider, F. E. and D. Wildermuth (2011). An autonomous unmanned vehicle for CBRNE
reconnaissance. 12th International Carpathian Control Conference (ICCC), Velke Karlovice,
Czech Republic, 25.-28. May 2011
Towler, J., B. Krawiec and K. Kochersberger (2012). "Radiation Mapping in Post-Disaster
Environments Using an Autonomous Helicopter." Remote Sensing 4(12): 1995-2015.

12
Development of radiation surveillance equipment in STUK for unmanned aerial vehicles
Roy Pöllänen, Petri Smolander
STUK – Radiation and Nuclear Safety Authority
Introduction
Unmanned Aerial Vehicles (UAVs) can be equipped with a number of different instruments,
which enables their use in various applications especially when manned platforms are not
appropriate. They can be safely applied for example in a severe nuclear accident to monitor
radioactive releases or to take samples from airborne materials. In the present paper we briefly
go through the work done in STUK during the past fifteen year period to develop/mount
radiation detection instrumentation to UAVs.
UAV platforms
In STUK, two types of platforms (Fig. 1) were equipped with radiation detection
instrumentation. 1) Mid-sized Ranger UAV is operated by the Finnish Defence Forces and is
mainly designed for electro-optical surveillance in military missions. Operation of Ranger is
autonomous or remotely piloted. The maximum operation distance is 150 km, maximum
operation height 4.5 km and maximum endurance 5 h. Flight speed is 100220 km/h. Take-
off is done by catapult and landing is on skids. Wing span is 5.7 m and maximum take-off
mass 270 kg. Mass of the payload is 40 kg. 2) Another type of radiation surveillance
equipment was mounted in a fixed-wing UAV known as Patria MASS mini-UAV. Mass of
the battery-driven UAV is 3 kg and payload capacity 0.5 kg. Maximum operation time is 1 h,
operating range 1020 km and optimal cruise speed 60 km/h. MASS flies fully autonomously
but manual control is also possible. Both UAV systems can send the measurement data in
real-time to the ground station.
Figure 1. Radiation detection instrumentation for Ranger (left) was mounted instead of the normal camera
equipment whereas no changes for the platform were necessary for the Patria MASS mini-UAV (right). See
http://www.stuk.fi/julkaisut_maaraykset/en_GB/stuk-ttl-
flyers/_files/88555484220687337/default/Flyer_008_Radiation_surveillance_and_UAVs.pdf
Radiation surveillance equipment
Three types of radiation detectors were mounted in Ranger. A GM counter was selected for
monitoring the external dose rate. The counter covers the dose rate range of 0.01 µSv/h 10
Sv/h. A 64 NaI(Tl) scintillation detector was for the radioactive plume localization. Large
scintillation detectors may be saturated in an active plume and to overcome this situation a
555 mm3 CZT detector was mounted inside the sampling unit. The filter cartridge contains
a paper/glass-fibre filter and a charcoal filter. Air flow through the filters is generated by the
dynamic air pressure.
Sampler
Spectrometer in
the fuselage
13
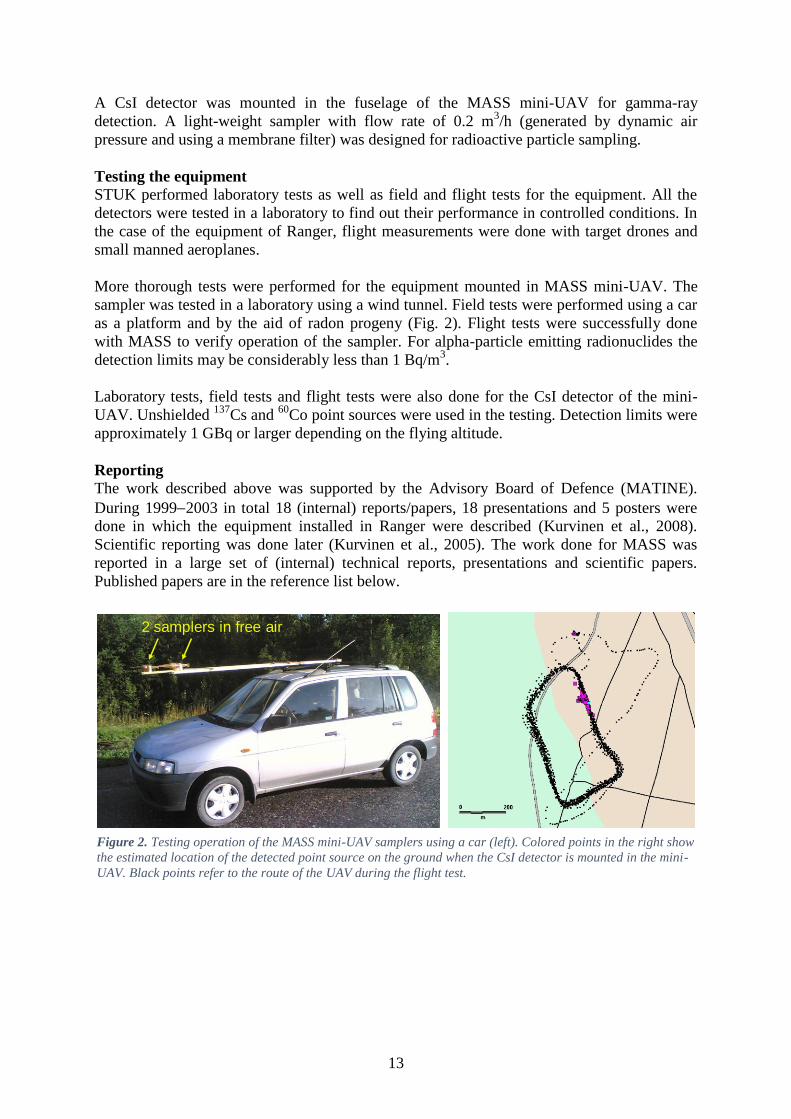
A CsI detector was mounted in the fuselage of the MASS mini-UAV for gamma-ray
detection. A light-weight sampler with flow rate of 0.2 m3/h (generated by dynamic air
pressure and using a membrane filter) was designed for radioactive particle sampling.
Testing the equipment
STUK performed laboratory tests as well as field and flight tests for the equipment. All the
detectors were tested in a laboratory to find out their performance in controlled conditions. In
the case of the equipment of Ranger, flight measurements were done with target drones and
small manned aeroplanes.
More thorough tests were performed for the equipment mounted in MASS mini-UAV. The
sampler was tested in a laboratory using a wind tunnel. Field tests were performed using a car
as a platform and by the aid of radon progeny (Fig. 2). Flight tests were successfully done
with MASS to verify operation of the sampler. For alpha-particle emitting radionuclides the
detection limits may be considerably less than 1 Bq/m3.
Laboratory tests, field tests and flight tests were also done for the CsI detector of the mini-
UAV. Unshielded 137
Cs and 60
Co point sources were used in the testing. Detection limits were
approximately 1 GBq or larger depending on the flying altitude.
Reporting
The work described above was supported by the Advisory Board of Defence (MATINE).
During 19992003 in total 18 (internal) reports/papers, 18 presentations and 5 posters were
done in which the equipment installed in Ranger were described (Kurvinen et al., 2008).
Scientific reporting was done later (Kurvinen et al., 2005). The work done for MASS was
reported in a large set of (internal) technical reports, presentations and scientific papers.
Published papers are in the reference list below.
2 samplers in free air
Figure 2. Testing operation of the MASS mini-UAV samplers using a car (left). Colored points in the right show
the estimated location of the detected point source on the ground when the CsI detector is mounted in the mini-
UAV. Black points refer to the route of the UAV during the flight test.

14
Conclusions
The goals set by STUK to develop radiation detection instrumentation for UAVs was to
investigate and introduce novel means to perform mapping of a radioactive plume, sampling
from the plume, fallout mapping and locating point sources. All these tasks can be performed
using the equipment described above.
References and publications
Kurvinen K, Pöllänen R, Valmari T, Kettunen M., 2000. Unmanned aerial vehicles in real-
time radiation surveillance. Proceedings of the NBC 2000 symposium on nuclear, biological
and chemical threats in the 21st century. Helsinki University of Technology, 13-15 June 2000,
Espoo, Finland.
Kurvinen K, Pöllänen R, Valmari T, Kettunen M., 2001. Säteilyn tiedustelu kauko-
ohjattavasta lennokista. Maanpuolustuksen tieteellinen neuvottelukunta, Raporttisarja B,
2001/3. (in Finnish)
Kurvinen K, Pöllänen R, Smolander P, Kettunen M., 2002. Radiation surveillance equipment
for unmanned aerial vehicle. Extended abstract in the Proceedings of the XXXVI Annual
Conference of Finnish Physical Society, Joensuu, March 14-16, 128.
Kurvinen K, Smolander P, Pöllänen R, Kuukankorpi S, Lyytinen J, Kettunen M., 2005.
Design of a radiation surveillance unit for an unmanned aerial vehicle. Journal of
Environmental Radioactivity 81, 1–10.
Kurvinen K, Smolander P, Pöllänen R, Lyytinen J, Kettunen M., 2008. Säteilytiedustelu
miehittämättömästä Ranger ilma-aluksesta. MATINE Sarja A, 2008/2. Helsinki:
Puolustusministeriö: Maanpuolustuksen tieteellinen neuvottelukunta MATINE; 2008. (in
Finnish)
Peräjärvi K, Lehtinen J, Pöllänen R, Toivonen H., 2008. Design of an air sampler for a small
unmanned aerial vehicle. Radiation Protection Dosimetry 132, 328–333.
Pöllänen R, Kurvinen K, Valmari T, Kettunen M., 1999. Radiation monitoring development
using unmanned aerial vehicles. Abstracts of 1999 completed research projects sponsored by
the Scientific Advisory Board for Defence (MATINE).
Pöllänen R, Kurvinen K, Valmari T, Kettunen M., 2001. Employment of an unmanned aerial
vehicle in radiation surveillance. Abstracts of research projects Completed in the year 2000.
Scientific Advisory Board for Defence, Report Series B, 2001/2.
Pöllänen R., 2008. Pää pilvissä mutta jalat maassa. Säteilyä voidaan havainnoida lennokilla.
ALARA 2008; (2): 20–21. (in Finnish)
Pöllänen R, Toivonen H, Peräjärvi K, Karhunen T, Rintala K., 2008. Radiation surveillance
using an unmanned aerial vehicle. In: Book of Abstracts. Hazards - Detection & Management.
5th
Dresden Symposium. 2008 Marh 3-7, Dresden, Germany. p. 33.

15
Pöllänen R, Toivonen H, Peräjärvi K, Karhunen T, Ilander T, Lehtinen J, Rintala K,
Katajainen T, Niemelä J, Juusela M., 2009. Radiation surveillance using an unmanned aerial
vehicle. Applied Radiation and Isotopes 67, 340–344.
Pöllänen R, Toivonen H, Peräjärvi K, Karhunen T, Smolander P, Ilander T, Lehtinen J,
Rintala K, Katajainen T, Niemelä J, Juusela M, Palos T., 2009. Performance of an air sampler
and a gamma-ray detector in a small unmanned aerial vehicle. Journal of Radioanalytical and
Nuclear Chemistry 282, 433–437.
Pöllänen R, Toivonen T, Peräjärvi K, Karhunen T, Smolander P, Ilander T, Rintala K,
Katajainen T, Niemelä J, Juusela M, Palos T., 2009. Sampling of airborne radionuclides and
detection of ionizing radiation using an unmanned aerial vehicle. In: Maatela P, Korpela S
(eds.). Proceedings of the NBC2009 Symposium, 7th
Symposium of CBRNE threats, meeting
the future challenges. Jyväskylä, Finland 2009. Defence Forces Technical Research Centre,
publications 18, 129–134.
Pöllänen R, Toivonen H, Peräjärvi K, Karhunen T, Smolander P, Ilander T, Lehtinen J,
Rintala K, Katajainen T, Niemelä J, Juusela M, Palos T., 2009. Performance of an air sampler
and a gamma-ray detector in a small unmanned aerial vehicle. In: Abstracts. Eighth
International Conference on Methods and Applications of Radioanalytical Chemistry. MARC
VIII. 2009 Apr 5-10; Kona, Hawaii, USA. American Nuclear Society, p. 28.
Smolander P, Kurvinen K, Pöllänen R, Kettunen M, Lyytinen J., 2003. Real time radiation
surveillance equipment for the unmanned aerial vehicle Ranger. In: Laihia K (ed).
Proceedings of the NBC 2003 Symposium on Nuclear, Biological and Chemical Threats - A
Crisis Management Challenge,15–18 June 2003, Jyväskylä, Finland. University of Jyväskylä,
Department of Chemistry, research report No. 98, 56–60.
Smolander P, Kurvinen K, Pöllänen R, Kettunen M, Lyytinen J., 2003. Development of a
prototype radiation surveillance equipment for a mid-sized unmanned aerial vehicle. In: Paile
W (ed.). Radiation protection in the 2000s – theory and practice. Proceedings of the XIII
ordinary meeting, August 25-29, 2002, Turku/Åbo, Finland. STUK-A195, 198–202.
16
Considerations in the development of small UARS – Unmanned Aircraft Radiometric
Systems
Magnus Gårdestig
Department of Medical Radiation Physics, Department of Medical and Health Sciences,
Linköping University, Linköping, Sweden. [email protected]
Introduction
Linköping University is part of the Swedish radiological and nuclear emergency expert
organization led by the Swedish Radiation Safety Authority. The organization utilizes AGS
(Airborne Gamma Spectrometry), CGS (Carborne Gamma Spectrometry) and FAT (Field
Assistance Team) in the data collection efforts. In an attempt to complement these
capabilities, we develop unmanned radiometric systems. We are in the progress of developing
gamma spectrometry systems onboard unmanned aircraft systems, UAS, using a multirotor
(Gårdestig and Pettersson 2011, 2012) and a fixed wing as well as air sampling on these
platforms.
Envisaged missions
Any measurement scenario where unmanned aircraft can be used offer operation from safety
distance in respect to irradiation as well as personal safety and forensic considerations. The
envisaged main mission for the rotary wing system is localization and identification of
individual radioactive sources. With a fixed wing, with longer endurance, mapping of ground
area of fallout is possible. Both systems are intended for mapping of fallout plume by dose
rate and assessment of air concentration by air sampling.
Aerial platform
Since we are mostly interested in the measurement itself and the analysis of the resulting data,
the aerial platform itself is secondary, but to prove the concept, we had the following criteria:
cost; several systems should use the same set of equipment,
size; transportable in a standard car and portable,
complexity; limited training,
endurance; mission time and
safety.
The measuring system is independent of the aerial platform, but we have chosen to cooperate
with a vehicle developer to have a suitable platform in regards of speed and other critical
parameters.
Detectors
The aerial platforms set limitations in payload. During recent years, commercial detectors
have been developed towards rugged, lightweight and affordable detectors. CZT
spectrometers lighter than 100 g is readily available. Light CsI(Tl) spectrometers are available
and open source PMT-base multichannel analyzers are available for NaI or LaBr scintillators.
Communications
For online data presentation, communication with the aerial platform is critical. The
communication link should be independent since communications tend to be congested in
emergency situations. Communication by WiFi, analog radio, GSM, UMTS, LTE, TETRA or
Zigbee were considered.

17
Data acquisition and presentation
The spectral and position data needs to be presented and analyzed for detection, localization,
identification and quantification. This is achieved by dose rate color coded position marker in
an on-line map, spectral data in waterfall display, full spectral view or by chosen ROI.
Assessment of source activity or surface concentration is made by calibrated peak count
coefficients. The data should be stored in the XML-file format according to N42.42 (ANSI
2012).
Position accuracy
When assessing the activity the distance to the source is a key factor. GPS systems needs to
be enhanced by RTK or dGPS technology to achieve desired accuracy and precision. Other
altitude sensors are barometers, ultra sound transmitter/receiver or lasers.
Conclusions
Linköping University is in the progress of developing a spectrometry system to be carried by
a small rotary wing quadcopter and a fixed wing airplane. Both operated under the Swedish
Transport Agency license category 1B for UAS below 7 kg (Transportstyrelsen 2009, 2013).
The system will be used in the Swedish RN preparedness organization and is intended to fill a
gap between man-portable measurement systems and full-sized airborne systems,
complementing car-driven.
The system will provide footage and measurements.
The current setup is the Kromek GR-1, a CZT (10x10x10 mm) with 2% FWHM% (137
Cs), 60
g and a 2” NaI(Tl) scintillator on a Bridgeport tube base MCA, approx. 900 g. The data
acquisition is made by the small Linux-computer Raspberry Pi and communication by ZigBee
868 MHz. GPS position is acquired from the APM autopilot. The data is presented and
analyzed by a developed program and the data is stored in XML-files compatible with
N42.42.
References
ANSI (2012). American National Standard Data Format for Radiation Detectors Used for
Homeland Security, ANSI. N42.42.
Gårdestig, M. and H. B. L. Pettersson (2011). RadiaCopter – UAS Gamma Spectrometry for
Detection and Identification of Radioactive Sources. NSFS Conference, Reykjavik.
Gårdestig, M. and H. B. L. Pettersson (2012). RadiaCopter – UAS Gamma spectrometry for
detection and identification of radioactive sources. IRPA13 the 13th International Congress of
the International Radiation Protection Association, Glasgow.
Transportstyrelsen (2009). Transportstyrelsens föreskrifter om verksamhet med obemannade
luftfartyg (UAS). TSFS 2009:88. Transportstyrelsen.
Transportstyrelsen (2013). Transportstyrelsens föreskrifter om verksamhet med obemannade
luftfartyg (UAS). TSFS 2013:27.

18

19
Unmanned Aircraft Systems
Claes Meijer, Scandicraft AB, Sweden
Notes from the presentation taken by Marie Carlsson and Magnus Gårdestig
Claes Meijer is a skilled and awarded pilot and developer and customizer of unmanned
aircraft systems. He has long experience in various aspects of the world of unmanned
systems.
His presentation gave an overview of different unmanned systems in various sizes and forms.
Everything from small helicopters for fun, quadcopters used by the fire brigade, up to military
drones.
Claes has his own company in developing unmanned systems. His presentation covered the
VTOL vehicle Transformer that can switch between rotary wing and fixed wing operation in
flight. He has also developed a jet driven target for air defense training.
The rotary wing system used by Linköping University is the quadcopter SAFE that is
designed by Claes with an integrated outer rail to protect the rotors on impact as well as
material or persons from the rotors.
The fixed wing system used by Linköping University is a 2.5 m wingspan plane that is
designed by Claes to carry as much payload as possible (up to 2 kg) and be able to fly slowly
(5-10 m/s).
Figur 1. Unmanned aircraft platforms used by Linköping University. The rotary wing vehicle SAFE to the left
and the fixed wing prototype to the right. Photos by Marie Carlsson and Claes Meijer.

20
Operational considerations regarding the use of unmanned vehicles for radiation
surveillance in Finland
Petri Smolander, STUK - Radiation and Nuclear Safety Authority, P.O.Box 14, FI-00881
Helsinki, Finland
UAV platforms in use of under consideration in Finland
UAV platform users can be divided in commercial operators and public sector operators.
Brief market survey did not reveal any potential commercial operators that could be used to
provide a UAV platform for radiation surveillance.
On the public sector currently only the Finnish Defense Forces (FDF) has two UAV systems
that could be used as a platform for radiation surveillance: Ranger tactical-UAV and Orbiter
II mini-UAV. Pertinent characteristics of both systems are presented in table 1. Table 1: Pertinent features of the FDF UAV platforms
Feature Ranger tactical-
UAV
Orbiter II mini-
UAV
Speed 150 kph 90 kph
Endurence 5 hrs 3-4 hrs
Payload 40 kg 1.5 kg
System complexity High Low
Deployment speed Slow Fast
Most notable differences are payload capacity and deployment speed. Ranger’s 40 kg payload
capacity enables larger and thus more sensitive detectors which enable higher flight altitudes
leading to larger surveillance footprints. On the other hand, the complexity of the Ranger
system impedes rapid response to a sudden event.
The Finnish Police and larger regional rescue departments are considering the use of small
multirotor UAVs (quadcopters, octocopters) for situational awareness in complex security
events and accidents. These can also be used as platforms if they become into use in the fore
mentioned organizations. Currently the short endurance of the small multirotor UAVs limits
their use for radiation surveillance only to small scale events.
Tethered UAVs are also considered for long endurance surveillance and monitoring mainly
for security related events. These UAVs are also usable for radiation surveillance in security
related events. Their virtually unlimited endurance and high bandwidth data link via tethering
cable are significant advantages of tethered UAVs.
Radiation surveillance mission types
Radiation surveillance missions can be divided in three main types: plume mapping, fallout
mapping and detection/location of radioactive sources.
Plume mapping is the most suited mission type for UAVs. Plume mapping is both dirty and
dangerous, thus not well suited for manned aircraft due to contamination risk of the aircraft
and the exposure of the pilot to radiation and radioactive material. UAVs also have the
contamination risk in plume mapping missions, but their smaller size and simpler structure
makes the decontamination task simpler compared to manned aircraft. In some cases the
contaminated UAV can be discarded all together due to the low cost of replacing it.
Fallout mapping can be done with manned aircrafts and in large scale radiological events they
are the most suitable platforms for the task. In smaller cases when the level of details required
or the surroundings (e.g. urban area) call for low level and slow speed flying, UAVs have the
advantage.

21
Detection and location of radioactive source(s) is also quite suitable mission type for UAVs if
the search area is small. As mentioned above the UAVs can fly lower and slower than usually
is considered safe for manned aircraft. This enables the use of very detailed and complex
search patterns. In case of rotary winged UAVs they can even hover above or land near the
source without any radiation safety risk to help marking the exact position of the source.
Confirmation of the absence of radioactive sources can be viewed as a special case of this
type of missions. Tethered UAVs would be very suitable for this type of special case missions
because they can easily provide continuous surveillance over the area of interest.
Payloads for radiation surveillance missions
Payloads for the radiation surveillance missions can be divided into three main categories:
radiation counters, spectrometers and air samplers.
Simple total radiation counters have rather simple electronics with low power consumption
which make them ideal for the smallest UAVs. Radiation counters also have low data rates
which mean that simpler, thus less power hungry, data links can be used. The level of detail of
the information total radiation counters provide is rather low, but in many cases it is enough
to establish the prevailing radiation safety situation. In the search of radioactive sources total
radiation counters are also adequate because in most cases the characteristics of the missing
source are a lower priority or already known beforehand.
Spectrometers are needed when radionuclide identification is relevant. Radionuclide
identification can be used to predict the temporal behavior of the radiation safety situation or
evaluate the significance of the detection of radioactive source (e.g. innocent detection vs.
security threat). Spectrometers are usually somewhat fragile and require more sophisticated
electronics than total radiation counters. Further on the data processing onboard or raw data
transmission to the ground station require even more elaborate electronics with larger power
consumption which means that spectrometer could not be installed to the smallest and
simplest UAVs.
Sampling is usually relevant only in plume mapping missions. The simplest air samplers that
are always collecting can be installed even to mini-UAV scale. The control of sampling
require some electromechanical components that prevent them being installed to the smallest
UAVs. The fact that sampling usually utilizes the air speed of the UAV to draw air through
the sampler makes fixed wing UAVs preferable platforms for air sampler due to their
capability for higher air speeds.
Rules of the air in Finland considering UAVs
The Finnish civil aviation regulatory authority is planning to loosen the regulations regarding
the non-recreational use of smaller remotely piloted aircrafts. In the draft national aviation
regulation the use of remotely piloted aircraft is exempted from aviation work licensing if the
following criteria is met:
• Maximum take-off weight of the aircraft is less than 25 kg.
• Flying altitudes are less than 150 m above ground level.
• Distance from the ground station (pilot) is less 500 m, the visual line of sight is
maintained unassisted and visual flight rules can be obeyed.
• The range can be extended with spotters who have duplicated two way communication
links to the pilot.
• Aircraft has means for safe termination of flight in case there is a loss of control.
• Air traffic control approval is needed for flying in controlled air space and the pilot has
a two way aeronautical radio (requires a license).
• The pilot has received training for the type of remotely piloted aerial system used.

22
• Aircraft flies more than 150 meters away from densely populated areas and large
crowds of people (police, customs, border guard and rescue services may be exempted).
If the distance from the ground station is required to be more than 500 m (without spotters) or
flying altitude is required to be higher than 150 m AGL, the flight requires a temporarily
segregated air space or the UAV must be accompanied by a chase plane. Segregation of the
airspace can be requested from the aviation regulatory authority. In all other cases the aviation
work license is required.
Criteria described above make it possible to use mini-UAV size fixed wing UAVs and
multicopters for radiation surveillance missions rather freely when maximum distance from
the ground station rule of 500 m can be obeyed. This encompasses fallout mapping after small
scale releases and detection and location of radioactive sources in small areas. The short
timescale of the dispersal of radioactive material in small scale release make plume tracking
extremely difficult due the slowness of deployment compared to the dispersal time.
Requirement of a chase plane in non-segregated air space completely negate the advantages of
the use of UAV in fallout mapping and source finding on large areas. Temporary segregation
of the airspace in most cases is difficult to justify because both mission types can be executed
with manned aircrafts. This leaves the plume mapping the only viable scenario for the large
scale events. The fact that airspace at risk of radioactive contamination is usually closed for
normal air traffic for radiation safety reasons makes the use of UAVs without chase plane in
large scale dispersal events possible.
Conclusions
Taking into consideration all the facts presented, the most viable use of UAVs for radiation
surveillance in Finland is the use of mini-UAVs and multicopters with spectrometric detectors
in small scale events.

23
NRPA’s considerations of unmanned measurements of radiation.
Thomas Bandur Aleksandersen, NRPA
Stationary unmanned systems:
After the Chernobyl accident, Radnett, a network of unmanned radiation monitoring stations
was build all across Norway. The system was upgraded and modernized between 2006 and
2008 and today boasts a total of 33 stations with at least one in every county. The purpose of
this network is to give an early warning of fallout or other nuclear incidents affecting Norway.
Further, the data collected will aid the decisions of the Crisis Committee for Nuclear
Preparedness in the early stages of a crisis.
Each station is equipped with a detector that measure dose rate (µSv/h) and a device for
measuring downpour. Dose rates are updated hourly, and automatic systems are evaluating
the measurements in regards to quantity and quality. Each station is connected to a computer
terminal at the NRPA, and alarms will go off if the readings exceed a certain limit.
The results from these stations are also published in yearly reports of radiation monitoring in
Norway. These reports as well as the hourly up to date readings are publically available on
our webpages.
Mobile unmanned systems:
To this date we got no unmanned mobile systems for radiation detection of our own or in
collaboration with other departments or agencies. The topic has been discussed over the years,
but as of yet it has not been a priority to acquire such a system for our purposes. This has
mainly been due to the fact that the cost of the systems themselves and training to operate
them has been regarded as too high in comparison to the benefits. Recently however, we’ve
seen that both the costs and training required for these systems have been going down to
acceptable levels. To investigate the matter further we joined the NKS activity SemUnaRS to
learn the current state of the art, and what others already have accomplished in this field.

24
Appendix 3 Seminar participants
Table 1. List of participants
Name Organization Country
Grann Andersson, Kasper NKS, DTU Denmark
Pöllänen, Roy STUK Finland
Smolander, Petri STUK Finland
Aleksandersen, Thomas Bandur NRPA Norway
Carlsson, Marie Linköping University Sweden
Gårdestig, Magnus Linköping University Sweden
Pettersson, Håkan Linköping University Sweden
Kock, Peder SSM Sweden
Meijer, Claes Scandicraft AB Sweden

Bibliographic Data Sheet NKS-331 Title SemUnaRS – Seminar on Unmanned Radiometric Systems
Author(s) Magnus Gårdestig1
Roy Pöllänen2
Thomas Bandur Aleksandersen3
Affiliation(s) 1Department of Medical Radiation Physics, Department of Medical
and Health Sciences, Linköping University, Linköping, Sweden. 2STUK − Radiation and Nuclear Safety Authority, Finland 3Norwegian Radiation Protection Authority
ISBN 978-87-7893-412-3
Date February 2015
Project NKS-B / SemUnaRS – Seminar on Unmanned Radiometric Systems
No. of pages 25
No. of tables 3
No. of illustrations 6
No. of references 43
Abstract There are several scenarios related to ionizing radiation or the release of radioactive materials where the use of unmanned vehicles certainly reduce the risk of receiving high doses to the personnel performing measurements. Other advantages are low costs of the equipment, operation, maintenance and services. The seminar on unmanned radiometric systems was held in October 2014. The seminar was dedicated to presentations on the status of unmanned mobile measurement capacities in the Nordic countries. An introduction to the topic of unmanned measurements covered some examples on systems of unmanned aerial, rotary and fixed wing, systems as well as ground based systems. A short description was given on the work of ERNCIP. Linköping University presented their considerations on their ongoing development of unmanned gamma-ray spectrometry systems and presented their rotary wing and fixed wing platforms developed by Claes Meijer.

STUK presented their experience to develop radiation monitoring instrumentation to unmanned aerial vehicles. A set of radiation detectors and a sampling unit was mounted to a mid-size Ranger military UAV. A lightweight sampler and a gamma-ray detector was installed to a small-size fixed-wing UAV. Extensive tests were done for both set of instruments. On the second day of the seminar there was time scheduled for open discussions on the way forward for Nordic collaborations regarding unmanned mobile measurements. The seminar revealed that the Nordic capacities of unmanned mobile measurements are diverse, but no country has a system operating today. Each country have different strategies on how to meet this demand; university research, military collaboration or procuring turn-key systems. There is a need for continued and concerted activities to strengthen the Nordic knowledge and capacities in the field of unmanned mobile measurements.
Key words Unmanned mobile measurements, UAS, UAV, air sampling, emergency preparedness
Available on request from the NKS Secretariat, P.O.Box 49, DK-4000 Roskilde, Denmark. Phone (+45) 4677 4041, e-mail [email protected], www.nks.org