Nikitas V-PhD Thesis-The Damping Effect of the Generalized Hooke's Law
189
THE DAMPING EFFECT OF THE GENERALIZED HOOKE’S LAW (A CRITIQUE OF THE CLASSICAL APPROACH TO STRUCTURAL DYNAMICS) by Vasilios Nikitas Dip. Civ. Eng. N.T.U. of Athens Thesis submitted for the degree of Doctor of Philosophy Heriot-Watt University School of the Built Environment, June 2012 This copy of the thesis has been supplied on condition that anyone who consults it is understood to recognize that the copyright rests with its author and that no quotation from the thesis and no information derived from it may be published without the prior written consent of the author or the University (as may be appropriate).
-
Upload
v-nikitas7730 -
Category
Documents
-
view
45 -
download
4
Transcript of Nikitas V-PhD Thesis-The Damping Effect of the Generalized Hooke's Law

THE DAMPING EFFECT OF
THE GENERALIZED HOOKE’S LAW
(A CRITIQUE OF THE CLASSICAL APPROACH
TO STRUCTURAL DYNAMICS)
by
Vasilios Nikitas
Dip. Civ. Eng. N.T.U. of Athens
Thesis submitted for the degree of
Doctor of Philosophy
Heriot-Watt University
School of the Built Environment,
June 2012
This copy of the thesis has been supplied on condition that anyone who consults it is
understood to recognize that the copyright rests with its author and that no quotation
from the thesis and no information derived from it may be published without the prior
written consent of the author or the University (as may be appropriate).

ii
ABSTRACT
In the classical view, the stresses in elastic continua obeying the generalized Hooke’s
law are conservative, which avoids losses of the total work of stresses, and hence, hys-
teresis loops and internal damping. Only a deviation from the generalized Hooke’s law
can lead to nonconservative stresses or equally to internal damping. On the other hand,
the relation between the strain matrix at a point and the displacement matrix of a con-
tinuum is classically faced as time-independent, and hence, independent of the loading
history, which constitutes the basis of current structural analysis and design.
The thesis supports that the above classical view cannot stand except for the physically
impossible case of a static (i.e. motionless) deformation. Actually, the stresses devel-
oped in the dynamics of any continuum, whether elastic or not, are nonconservative,
that is, the total work of stresses cannot be a single-valued function of only the deforma-
tion displacements or strains. As a result, losses of the total work of stresses, i.e. inter-
nal damping and hysteresis loops, must be taken into account even for a continuum
obeying the generalized Hooke’s law. Further, the relation of a strain matrix at a point
to the displacement matrix in any continuum proves to depend on the loading history,
thereby being time-dependent, which overturns the basis of current structural analysis
and design and makes clear the need for a revision. To this need, the thesis suggests an
iteration procedure to computing the actual response and internal damping of structures.

iii
DEDICATION
To the great poet and all those who have taught that on our way to Ithaca, we won't en-
counter insuperable obstacles other than those brought by our souls:
“… Laistrygonians, and Cyclops,
wild Poseidon - you won't encounter them
unless you bring them along inside your soul,
unless your soul sets them up in front of you. …”
From “Ithaca” by Konstantinos Kavafis

iv
ACKNOWLEDGEMENTS
I owe a great debt of gratitude to my Supervisors and all those academics who spent
some of their valuable time on aspects of my research and offered me critical views. As
a matter of fact, their views (even the negative ones) helped me to make my analysis as
simple as possible to avoid misunderstanding by scientists of good will.
I am deeply indebted to both of the Prefecture of Drama and the Greek Ministry of En-
vironment, Land Planning and Public Works for their helpful response to my scientific
endeavour and for the educational pay leave given.
Last but not least, I wish to heartily thank my family in Drama and in Athens, and in
particular my sons, as well as my friends Martin and Joyce in Edinburgh, for their love,
understanding, and support given to me in the hard days of researching at Riccarton
campus of Heriot-Watt University, Edinburgh, and afterwards.

v
DECLARATION STATEMENT
I hereby declare that the work presented in this thesis was carried out
by myself at Heriot-Watt University, Edinburgh. Except where refer-
ence is made to the work of others, this thesis is believed to be origi-
nal and has not been submitted for any other degree.
Vasilios Nikitas (Candidate)
Professor Keith Cornwell (Supervisor)
Professor Gareth Pender (Supervisor)
June 2012
Date

vi
TABLE OF CONTENTS
CHAPTER 1
INTRODUCTION
1.1. The Field and the Objectives of the Research 1
1.2. Generalized Hooke’s Law and Damping Classically Faced 6
1.3. Damping Effect of the Generalized Hooke’s Law 10
1.3.1. The real potential of the generalized Hooke’s law 10
1.3.2. Nonconservative nature of the internal stresses in a continuum 13
1.3.3. The error in the classical approach to conservative elastic stresses 15
1.4. Discrete equivalent of the Generalized Hooke’s Law 18
1.4.1. Deformation at a point of a continuum in terms of the displacement matrix 18
1.4.2. Principle of virtual work and matrix equation of motion for elastic continua 22
1.4.3. Discrete equivalent of the continuum formulation of Hooke’s law 26
1.4.4. Elastic-viscous form of the equation of motion of an elastic continuum 27
1.4.5. Strain energy as a non-single-valued function of the displacement matrix 29
1.4.6. Damping and structural design 30
1.4.7. Explanation of the experimental stress-strain relation 31
1.5. Outline of the Thesis 34
CHAPTER 2
NONCONSERVATIVE NATURE OF
INTERNAL STRESSES IN CONTINUUM DYNAMICS
2.1. General 36
2.2. Consistency of Elasticity with Damping 36
2.3. Classical Model of Internal Stresses 38
2.4. The Notion of Conservative Forces and Stresses 41
2.5. Equal Works of Internal Stresses and Surface Tractions 43
2.6. Nonconservative Nature of the Internal Stresses 43
2.6.1. Multi-valued relation of displacements and the total work of internal stresses 43

vii
Scholium A: The uniqueness of the solution to a given external loading 45
Scholium B: Displacements uniquely defined by accelerations 46
2.6.2. Deformation motion as source of damping 48
2.7. Static Character of Conservative Internal Stresses 49
2.8. Critical Points on the Classical View of Elastic Stresses 50
2.9. Origin of the View of Conservative Elastic Stresses 52
2.10. Bernoulli’s Transformation in Continuum Dynamics 53
2.10.1. Longitudinal vibration of an elastic rod 55
2.10.2. Transverse vibration of a taut string 60
2.10.3. Bending vibration of an elastic beam 62
2.11. Principle of virtual work, energy losses and
the first thermodynamic axiom 65
2.12. Concluding Remarks 68
CHAPTER 3
NONCONSERVATIVE NATURE OF INTERNAL FORCES
IN THE ELASTIC DISCRETE SYSTEM DYNAMICS
3.1. General 69
3.2. Discrete Versus Continuous Systems 70
3.3. Elastic Versus Conservative Discrete Systems 72
3.4. Elastic Discrete Systems with Viscous Damping 74
3.5. Discrete Equivalent of the Generalized Hooke’s Law 74
3.6. Concluding Remarks 76
CHAPTER 4
DAMPING IN THE WAVE EQUATION OF CONTINUA
RULED BY LINEAR STRESS-STRAIN RELATIONS
4.1. General 77
4.2. The Solution to the Wave Equation as a Fourier Series 79
4.3. Classical Uncoupling of the Wave Equation 81
4.3.1. Integration approach to classical uncoupling 81

viii
4.3.2. Differentiation approach to classical uncoupling 83
4.4. The Classical Undamped Solution to the Wave Equation 85
4.5. The Controversy Over Bernoulli’s Transformation 86
4.6. Equivalence Between the Integrandwise and Termwise
Differentiability Assumptions 88
4.7. Damping Effect of Deformation Motion 90
4.8. Damping Effect of Removing the Classical Limitation 91
4.8.1. Admissibility of acceleration discontinuities 92
4.8.2. Damping effect of removing the integrandwise differentiability assumption 92
4.8.3. Damping effect of removing the termwise differentiability assumption 94
4.9. Nonconservative Elastic Internal Body Forces 97
4.10. Introduction of Damping Ratios 99
4.11. Computation of the General Solution 100
4.12. The Limitation of the D’Alembert Solution 101
4.13. Concluding Remarks 105
CHAPTER 5
DAMPING IN THE GENERAL SOLUTION TO THE
ELASTODYNAMIC PROBLEM OF A CONTINUUM
5.1. General 108
5.2. The Partial Differential Equation of Motion 110
5.3. Transforming Boundary Values Into Homogeneous Ones 112
5.4. Classical Uncoupling into Undamped Vibrations 113
5.4.1. Integration approach to classical uncoupling 115
5.4.2. Differentiation approach to classical uncoupling 117
5.5. The Classical Undamped Solution 119
5.6. Equivalence Between the Integrandwise and Termwise
Differentiability Assumptions 120
5.7. Damping Effect of Deformation Motion 122
5.8. Damping Effect of Removing the Classical Assumptions
of Integrandwise and Termwise Differentiability 125
5.8.1. Admissibility of acceleration discontinuities 125
5.8.2. Damping effect of removing the integrandwise differentiability assumption 126

ix
5. 8.3. Damping effect of removing the termwise differentiability assumption 128
5.9. Nonconservative Elastic Internal Body Forces 130
5.10. Introduction of Damping Ratios 133
5.11. Computation of the General Solution 133
5.12. Concluding Remarks 135
CHAPTER 6
COMPUTATION OF INTERNAL DAMPING AND
ACTUAL RESPONSE IN ELASTIC STRUCTURES
6.1. General 137
6.2. Computation of the Actual Elastic Response 139
6.2.1. Theoretical basis of the computation 139
6.2.2. Summarizing the steps of the computation 142
6.2.3. The computation in practice 145
6.3. Computation of Equivalent Viscous Damping Matrix 145
6.4. Internal Damping and Structural Design 146
6.4.1. Basics of elastoplastic response computation 146
6.4.2. Improvement in the current structural design practice 148
6.4. Concluding Remarks 149
CHAPTER 7
CONCLUSIONS AND A MATHEMATICAL IMPLICATION
7.1. Conclusions 151
7.2. A Mathematical Implication 155
APPENDIX
MY PAPER “THE DYNAMICS OF CONTINUOUS
SYSTEMS CRITICIZED” IN FURTHER DETAILS
A.1. General 156

x
A.2. The Partial Differential Equation of Motion 157
A.3. The Continuous-Field Solution of Discrete Origination 159
A.4. The Classical Contradiction 162
A.5. The Root of the Classical Contradiction 163
A.6. Concluding Remarks 164
PUBLICATIONS
Articles in International Journals 166
Congress & Conference Proceedings 166
REFERENCES 167

xi
LIST OF FIGURES
Fig. 1.1: Different deformation curves for the same displacement matrix 20
Fig. 2.1: (a) The total stresses on the boundary surface of an infinitesimal element. 39
(b) The total stresses of an infinitesimal element on the boundary surface
of a continuous structure. 39
Fig. 5.1: Continuum model of a uniform elastic column 111
Fig. A.1: Uniform continuum model of an elastic column 157

xii
NOTATION
All symbols used in this thesis are defined where they first appear. The meaning of
symbols that denote more than one quantity should be clear when read in context.
ACCENTS & PREFIXES
˙ a dot over a symbol denotes differentiation with respect to time, i.e. u x,t
is the derivative with respect to the time variable t
΄ a prime over a symbol denotes differentiation with respect to the position,
i.e. u x,t is the derivative with respect to the position variable x
* an asterisk to the right side over a symbol indicates a complex function
(i.e. k* is the complex stiffness and E * is the complex elasticity modulus)
operator for virtual variation (i.e. q t stands for a virtual variation of the
function tq )
operator for finite variation (i.e. stands for a finite variation of the
strain )
SYMBOLS FOR FUNCTIONS
A cross-sectional area
0 , n constants
x, y,za time-independent component of the matrix coefficient of proportionality
between x, y,z;tu and tU
x, y,z;ta complementary term to the matrix x, y,za
x, y,zb time-independent component of the matrix coefficient of proportionality
between x, y,z;tε and tU

xiii
x, y,z;tb complementary term to the matrix x, y,zb
0 , n constants
C damping constant
c damping coefficient, velocity of propagation of waves, constant
eqc equivalent viscous damping coefficient
C constant damping matrix
eqC constant equivalent viscous-damping square matrix
eq tC time-varying equivalent viscous-damping square matrix
xy xz yzγ ,γ ,γ shearing strains
tD matrix of inertia fluctuation per displacement
dV elementary (infinitesimal) volume
virtual variation operator
E modulus of elasticity (Young’s modulus)
*E complex modulus of elasticity
EI flexural rigidity, elastic bending stiffness
t mean strain all over the length of a spring, creep strain
x,t axial strain at level x and time t
xx yy zzε ,ε ,ε normal strains
x, y,z;tε column matrix of strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ at a point x, y,z
n nt ,q scalar coefficient defined as function of the time t and the generalized dis-
placement nq t
material or energy loss factor, hysteretic or structural damping ratio
t internal energy
iF vector of i internal force
, tF F column matrix of internal forces
f x function of x , distribution of displacement along axis x
i imaginary unit 1
I moment of inertia of a cross-section
K stiffness matrix
tK stiffness fluctuation matrix
k stiffness of a single-degree-of-fredom system

xiv
*k complex stiffness of a single-degree-of-fredom system
k t stiffness fluctuation function
x, y,zκ square matrix of elasticity constants at point x, y,z
n constant wavenumber
L length of a line system
M x,t bending moment at level x and time t
M mass matrix
tM matrix of inertia fluctuation per acceleration
m concentrated (lumped) mass
m mass per unit length of a line system
N integer, number of degrees of freedom, axial force
N z,t internal elastic axial force at level z and time t
n integer
Poisson’s ratio, integer
constant damping ratio
n constant damping ratio of the n mode
n nt;q scalar coefficient defined as function of the time t and the generalized
displacement nq t
P t external force
tP column-matrix of dynamic loading
Q heat density supplied at a point of a body
nq t generalized displacement
tq column-matrix with elements nq t
r wave-analysis variable equal to the sum x c t
ir x, y,z;ta element of a diagonal marix relating x, y,z;ta to x, y,za
ir x, y,z;ta element of a diagonal marix relating x, y,z;tb to x, y,zb
, x, y,z mass density per unit volume
s wave-analysis variable equal to the sum x c t
x,t axial stress at level x and time t
x, y,z;tσ column-matrix of stresses xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ at a point x, y,z
nσ x,t modal stress

xv
xx yy zzσ ,σ ,σ normal internal stresses
0 applied constant stress
T tension imposed on a string, upper index for transposing a matrix
x y zT ,T ,T surface tractions
x, y,z;tT column matrix of surface tractions at point x,y,z
t time
ˆ, integrand variable for time t
xy xz yzτ ,τ ,τ shearing internal stresses
U intrinsic-energy function, strain-energy function
inU t work of the internal forces developed in a continuous system
, tU U column matrix of displacements of a set of discrete points
U integrand variable for U
u t displacement response of a single-degree-of-freedom system
u x,t displacement at level x and time t
x y zu ,u ,u displacements at a point of a continuum
u x,t strain at level x and time t
u x,t curvature at level x and time t
x, y,z;tu column matrix of displacements at a point x, y,z
iu vector of displacement of the application point of force iF
iu integrand variable for iu
V x,t shearing force at level x and time t
W work, total work of the internal forces of a system of mass points
iW work of the internal force iF
σ xW total work of the stress derivatives all over the continuum
V xW total work of the force derivatives all over the continuum
W t total work of external forces up to time t
W U work as a single-valued function of the displacement matrix U
i iW u work as a single-valued function of the displacement vector iu
w r,s an equivalent expression of u x,t in terms of the independent variables
r x ct and s x ct

xvi
phase angle
Φ square matrix of modes with column matrices nφ
nφ x orthogonal function of mode, normal (or natural) mode
nφ modal column matrix
X external body force per unit of volume along axis x
x position coordinate of a point
Y external body force per unit of volume along coordinate axis y
y position coordinate of a point
ny t modal generalized displacement corresponding to mode nφ x
nψ t Fourier coefficient
tΨ matrix proportion of tU to tU
Z external body force per unit of volume along axis z
z position coordinate of a point
circular frequency of a harmonic dynamic force F t
natural circular frequency
nω modal circular frequency

1
CHAPTER 1
INTRODUCTION
1.1. THE FIELD AND THE OBJECTIVES OF THE RESEARCH
All vibrating structures are subject to physical mechanisms that dissipate their vibration
energy and reduce the amplitude of vibration. This energy dissipation is called damping
and the mechanisms responsible for its generation can be idealized by means of damp-
ing forces that consume vibration energy. Damping may be classified as external
damping produced by external damping loads and internal or structural damping pro-
duced by internal damping forces or stresses developed within the structure. Since the
externally applied loads, and hence, the external damping forces, may be considered as
external variables of the vibration problem whose values are given data, we focus on in-
ternal damping and the related internal damping forces or stresses as internal variables
of the problem whose values must be computed.
There are various mechanisms of internal damping for actual structures, and often more
than one mechanisms may be present at the same time. In simple systems such as those
used in the laboratory, most of the internal damping presumably arises from the thermal
effect of repeated elastic straining of the material and from what is referred to as the in-
ternal friction of a solid when deformed. In actual structures, however, many other
mechanisms also contribute to the internal energy dissipation. These include friction at
joints and connections in steelworks, opening and closing of microcracks in concrete,
and friction between the structure itself and its non-structural elements (such as partition
walls in a building). It seems impossible to identify or describe mathematically each of
these energy-dissipating mechanisms in an actual structure.
On the contrary, in a structure highly idealized as a continuum ruled by a few constitu-
tive laws of behaviour, that is, in the mathematical model of a structure, it seems not on-
ly quite possible but also necessary to identify or describe mathematically the internal

Chapter 1: Introduction
2
damping process in relation to the constitutive laws used. Accordingly, the source of
internal damping, and hence, of the internal damping forces, must be sought in the con-
stitutive laws. In particular, in a structure highly idealized as a continuum, whether
elastic or not, which responds to external loading by means of strains and a continuous
distribution of differentiable internal stresses, this thesis shows that the internal stresses
in the continuum are always nonconservative under dynamic conditions. This means
that internal damping is an inherent characteristic of the idealization of a dynamically
excited structure as a continuum with differentiable internal stresses. And since this
idealization actually underlies the matrix structural analysis, although this analysis ap-
pears related to a discretization of structures, it follows that also the matrix structural
analysis cannot conclude an undamped behaviour of a structure, whether elastic or not.
So, if no damping source results from the existing constitutive laws, despite the
continumm idealization of a dynamically excited structure, an error must be sought in
the laws, which should appropriately be corrected to comply with internal damping.
The core question posed in this research is whether internal damping forces can be con-
sistently considered to result from the internal stresses developed in the dynamically ex-
cited elastic continua, in particular those obeying the generalized Hooke’s law. That is,
the question is about the possibility of internal damping appearing as an effect of the
generalized Hooke’s law. The answer to this question proves to be positive, which ac-
tually means that the elastic internal stresses or the elastic internal forces built up by the
elastic internal stresses are nonconservative. And hence, damping components of the
elastic internal stresses must be faced as inherent in the generalized Hooke’s law, which
overturns conventional wisdom. As a consequence of this outcome, the equivalent dis-
crete formulation of the generalized Hooke’s law must include a damping term in addi-
tion to its conservative term, thereby describing a nonconservative system of forces.
The above view can be given a more generalized form: The thesis offering analytical
proofs shows that internal damping (i.e. damping due to internal forces) develops in the
vibrations of all continuous systems, whether elastic or not, and also that a discrete sys-
tem can be classified as elastic if and only if develops internal damping. There only ex-
ists the possibility of a statically deforming system to present zero damping, thereby
presenting conservative internal forces. From this aspect, the thesis is a thorough cri-
tique of the classical approach to the dynamics of the elastic continuous systems and its
consequences for structural analysis and design, and emphasizes the need for a rather
radical revision of the current views on damping in the context of classical elasticity.

Chapter 1: Introduction
3
The thesis reflects five central objectives:
The first objective is to demonstrate that the generalized Hooke’s law as a linear relation
between stresses and strains at the same point of a dynamically deformed continuum ac-
tually refers to nonconservative (i.e. including damping components) internal stresses.
As a matter of fact, what could justify the classical view of zero internal damping forces
in an elastic continuous system is the single-valuedness of the total work of all internal
stresses all over the continuum as a function of only the displacement distribution in the
continuum. This necessary and sufficient condition for conservative internal stresses,
however, cannot be fulfilled for any continuum (and not only for an elastic one) on the
ground of a dynamic deformation of the continuum. Actually, the total work of internal
stresses includes a contribution to the kinetic energy of the continuum made by the un-
balanced stress components, which is not a single-valued function of only the displace-
ments, in addition to the displacement-dependent strain energy of the continuum made
by the balanced stress components at each point. Conservative internal stresses, there-
fore, may only develop under static (i.e. motionless) deformation of the continuum.
The classical view of zero internal damping forces in an elastic continuous system is
founded on the illusion that the generalized Hooke’s law of continuum elasticity and the
law of conservative interactions between any two mass points of a discrete system are
equivalent laws. Actually, there is a substantial difference between the two laws: The
total work of the internal forces of a discrete system obeying the conservative interac-
tion law equals the strain energy of the system, while the total work of the internal
stresses of a continuum obeying the generalized Hooke’s law equals the strain energy
plus a portion of the kinetic energy of the continuum. This portion of kinetic energy is
done by the spatial derivatives of the internal stresses of the continuum, which behave
as nonconservative internal body forces. On the other hand, a discrete system obeying
the conservative interaction law cannot be defined as elastic; for it undergoes an un-
damped free vibration after unloading, instead of returning to its undeformed state.
The second objective is to offer theoretical evidence that the elastic-viscous discrete
model of dynamic behaviour, which underlies modern structural analysis and design, is
but a reasonable discrete equivalent of the elastic continuum model. The elastic-viscous
discrete model can also be derived from the basic laws of the dynamics of an elastic
continuum, namely, the generalized Hooke’s law and Newton’s second axiom, after re-
alizing that the relation between the strains at an arbitrary point and the displacements

Chapter 1: Introduction
4
of an arbitrary set of discrete points of the continuum depends upon loading history, and
hence, time. This realization contrasts the classical view that the matrix of either of the
displacements and strains at an arbitrary point can linearly be related to the matrix of the
displacements of an arbitrary set of discrete points of a continuum by means of a matrix
coefficient exclusively depending on the coordinates of the arbitrary point. Only on this
classical view, the relation between the displacement or the strain matrix at an arbitrary
point and the matrix of displacements of the discrete points appears to be independent
of time and loading, and the elastic internal stresses appear to be conservative. Actu-
ally, for constant displacements of the arbitrary set of discrete points, the displacements
or the strains at any intermediate point may vary with time under appropriate loading
changes, which verifies the nonconservative nature of the generalized Hooke’s law.
The third objective is to explain why the classical view that the mathematical analysis
of the dynamics of the elastic continuous systems exclusively leads to their undamped
response on the ground of the generalized Hooke’s law is nothing but a myth.
What actually leads classical analysis to an undamped general solution of the elastody-
namic problem is not the generalized Hooke’s law itself. It is the adoption of special
assumptions assured by the continuity of accelerations with respect to time that lead to
uncoupling the partial differential equation of motion of the elastodynamic problem into
an infinite number of ordinary differential equations representing undamped vibrations
of independent single-degree-of-freedom systems. However, finite discontinuities of ac-
celerations are actually admissible to the elastodynamic problem, which cannot assure
the special assumptions. As for the uncoupling into an infinite number of undamped vi-
brations, this by no means necessitates that the general solution of the elastodynamic
problem as the superposition of the undamped vibrations be undamped.
Releasing the analysis from these shortcomings leads to a damped general solution of
the elastodynamic problem. This is verified by examining a taut string subjected to an
initial displacement and a uniform elastic column ruled by the generalized Hooke’s law
and subjected to an axial surface traction at its free end. The damped response of either
of these two continuum examples is evaluated under the simplifying hypothesis of a
constant damping ratio for each mode of vibration.
The fourth objective is to make clear that the classical dispute over the dynamic ade-
quacy of the generalized Hooke’s law has been founded on an incorrect interpretation of
experimental evidence resulting from overseeing two facts:

Chapter 1: Introduction
5
1) By definition, the dynamic strains and stresses involved in the generalized Hooke’s
law exclusively refer to the same infinitesimal element (that is, an element with infini-
tesimal dimensions, thereby tending to become a point). Consequently, checking the
dynamic validity of the law by directly measuring strains and stresses developed within
an elastic structure requires that the measurements of the related strains and stresses ex-
clusively refer to an infinitesimal element, which is not practically realizable.
2) All experimental specimens imposed on dynamic loading tests are actually finite-
dimension elements, however small their finite dimensions might be. Moreover, what
are directly measured in such tests are the total displacements of the specimens at their
end points of application of the external loads and the magnitudes of the loads and not
strains and stresses at the same point within the specimens. Only indirectly, after as-
suming the type of the relation between the strains at an arbitrary point and the total
displacements at an arbitrary set of discrete points of the specimen, an estimation of the
magnitude of the strains is possible. Evidently, such an estimation only reflects the reli-
ability of the assumption made and by no means the reliability of the generalized
Hooke’s law. For example, it is not the experimental evidence of hysteresis loops itself
that contradicts the generalized Hooke’s law but only the classical assumption that the
strains at an arbitrary point of a specimen and the displacements of an arbitrary set of
discrete points of the specimen can be related independently of time and loading.
Taking into account these facts, it sounds quite logical that all experimental evidence re-
ferred to either the hysteresis loops or the phenomenon of internal damping actually
comply with the generalized Hooke’s law and its theoretical and practical consistency.
The fifth objective is to offer a reliable method for the theoretical computation of the in-
ternal damping and the actual response of an elastic continuum system, by focusing on
substituting the actual time-dependent relation between the displacement matrix of the
system and the strain matrix at a point of the system for the corresponding classical
time-independent relation, with no recourse to experimental data for damping ratios.
Actually, the current computation of the response of an elastic continuum system is
founded on the arbitrary assumption that the relation between the displacement matrix
of the system and the strain matrix at a point of the system depends only on the position
of the point and is independent of timeand loading. However, this can only hold for the
static (i.e. motionless) deformation of the system, which implies the need for suggesting
a reliable computation approach to the actual response of an elastic continuum system.

Chapter 1: Introduction
6
1.2. GENERALIZED HOOKE’S LAW AND DAMPING CLASSICALLY FACED
Since the midst of the eighteenth century, when Bernoulli suggested the modal analysis
for the dynamic problem of a continuous system and applying it to the free vibration of
the taut string [1] concluded an undamped solution, tremendous advances have been
brought about in science and engineering but the conclusion for the undamped character
of that early solution has not changed. The completion of the theory of elasticity [2]-
[10], which was achieved in the 1820’s by A. Cauchy via the generalization of the
original Hooke’s force-displacement law to a linear stress-strain relation referred to a
point of a continuous system [2 p.97], [5 pp.1-4,58], [10 pp.44-59], allowed of extend-
ing the use of Bernoulli’s analysis to the dynamics of the elastic continuous systems.
The solutions classically gained were also of an undamped character, which accounts
for establishing the academic view that the generalized Hooke’s law is inconsistent with
internal damping. According to this view, the elastic stresses developed in a dynami-
cally excited elastic continuous system cannot possess damping components, or equally,
the damping forces cannot be considered as components of the internal elastic forces
developed in an elastic continuous system dynamically excited. Therefore, within the
frame of classical elasticity, the damping forces are conventionally taken for external or
quasi-external forces, that is, for real or quasi components of the dynamic loading. This
is a fundamental postulate of Structural Dynamics, which has been enunciated in the
relevant literature since the pioneering work of Lord Rayleigh in 1877 [11]-[38]. In
fact, this postulate reflects the method of separating the variables of a partial differential
equation of motion on the arbitrary assumption of termwise differentiation of the Fou-
rier series representation of the solution sought [39]-[55].
Since the late 1880’s, the results of a great number of low and high-rate cyclic loading
tests in the elastic range of response have led to force-displacement diagrams in the
form of closed curves (hysteresis loops), which are classically interpreted as closed
stress-strain curves in contrast to the straight lines predicted by the generalized Hooke’s
law. This elastic hysteresis effect is classically taken for sign of a defect of the general-
ized Hooke’s law [2 p.120]. However, in the subtle expression of Love: “the subject is
still rather obscure” [2 p.120]. Regarding the hysteretic data themselves, the same au-
thor notices: “They all imply a dependence of the instantaneous state of a body upon its
previous states as well as upon the instantaneous conditions” [2 p.120]. These notes
best crystallizing the views of early 1910’s could also express without any substantial

Chapter 1: Introduction
7
difference the modern views of Structural Mechanics, and in particular of Structural
Dynamics and Earthquake Engineering [17 pp.43-57], [35 pp.152-159].
The above classical views very early led to the suggestion that the generalized Hooke’s
law must be modified so that it will comply with the hysteretic phenomenon. The sug-
gestion that the generalized Hooke’s law in the simple formulation of the one-
dimensional stress and strain referred to the same level x
x,t E x,t (1.1)
should be modified by the inclusion of the rate of change of the strain, namely, x,t ,
in the linear formulation [33 p. 142 eq. (8-8)]
x,t E x,t C x,t , (1.2)
with E and C standing for the modulus of elasticity and a damping constant, respec-
tively, goes back to the time of Boltzmann [56]. This idea, which forms the basis of the
theory of viscoelasticity, Meyer [57]-[59] and Duhem [60], [61] were the first to elabo-
rate. After a stagnation period, the theme attracted much interest in the 1950’s due to
the emerging field of high-polymer technology. Theoretical studies in linear viscoelas-
ticity developed along two basic objectives: Understanding the basic behaviour of vis-
coelastic materials through modification of Hooke’s one-dimensional stress-strain rela-
tion [62], [63] and solving boundary-value problems [64]. The current theory of linear
viscoelasticity has been formulated mainly through the expositions of Coleman and Noll
[65] and Gurtin and Sternberg [66] and has been mathematically advanced via subse-
quent contributions by Gurtin and Herrera [67], Day [68] and Wilkes [69].
From an engineering viewpoint focusing on Structural Dynamics [70]-[75], the above
viscoelastic modification in the simple formulation (1.2) or its generalization [35 p.152
eq.(3.48)], [75 p.69 eq.(2.33), p.71 eq.(2.42)] became the platform on which the conven-
tional explanation of the hysteresis loop of a force-displacement relation stands. Ac-
cording to this viewpoint [16 pp.139-140], [33 pp.142-145,369-370], [35 pp.152-159],
the generalized Hooke’s law is inconsistent with the damping phenomenon inherent in
the dynamic behaviour of materials, which indicates the dynamic inadequacy of the law.

Chapter 1: Introduction
8
On the other hand, the nonlinear stress-strain relation that is classically derived from the
hysteresis loop supposedly verifies the dynamic inadequacy of the linear generalized
Hooke’s law, and hence, it seems to confirm the viscoelastic modification of the law. A
thorough exposition of the subject with extensive references is given mainly in the
works of Lazan [73] and Nashif [75], which summarize the dominant interpretation of
the experimental evidence obtained worldwide until the decades of 1960’s and 1980’s,
respectively. In terms of this interpretation, the linear dynamic behaviour of materials
can be best approximated by the formula [35 p.152 eq.(3.48)], [75 pp.68-71 eq.(2.42)]
0 0
1 1
n n
n nn nn n
d d
dt dt
, (1.3)
where 0 , n and 0 , n stand for constants characterizing the dynamic behaviour of
the specific material considered.
The above formula describes the general linear viscoelastic model for modifying the
generalized Hooke’s law so that it will comply with the hysteretic phenomenon or
equally with the internal damping of the elastic continuous systems.
Applying a harmonic stress 0i te , the corresponding steady-state harmonic
strain is assumed to be 0
i te
, with 0 , 0 representing real amplitudes,
standing for a phase angle and 1i being the imaginary unit. In this case, the vis-
coelastic model (1.3) leads to the concept of the complex modulus of elasticity *E de-
fined as [35 pp.153-154 eq. (3.53),(3.57)], [75 p.76 eq.(2.68)]
0
1
0
1
1
nn
* in
nn
n
i
E e E i
i
, (1.4)
where E is a constant real modulus of elasticity, is the material loss factor (also
called hysteretic or structural damping ratio) accounting for the dissipation of vibration
energy per cycle of loading. The material loss factor is in general a function of the
excitation frequency and the temperature for any specific material [76 pp.3-6].

Chapter 1: Introduction
9
On the ground of the above classical view, the concept of the complex stiffness modulus
*k is derived from a constant real stiffness modulus k [35 p.153], [75 p.78]
1*k k i , (1.5)
and the differential equation of motion of the single-degree-of-freedom system is ex-
pressed by means of its lumped mass m , its complex stiffness 1k i , its harmonic
loading i t0P e and its response u t in the form [35 p.154], [77 p.502]
01 i tm u t k i u t P e . (1.6)
Evidently, the steady-state solution 0
i tu t u e
of the above equation of motion
equals that of the classical differential equation of motion of the system [35 p.154]
0 i tm u t c u t k u t P e , (1.7)
on account of the steady-state solution property u t i u t . This property allows
the determination of the viscous damping coefficient c as follows [35 p.154]
c k . (1.8)
Modern research on internal damping and the hysteretic phenomenon, both faced as in-
consistent with the generalized Hooke’s law, has been centred mainly on the kind and
the causality of the dependence of the damping coefficients c and on the range of the
excitation frequency that by means of the Fourier integral transform contributes to
the frequency-domain description of a general dynamic loading [76], [77].
As regards engineering practice, according to the standard method, the damping forces
imposed on an elastic structure are assumed to act as the velocity-dependent resistance
of a real or quasi-external environment [37 pp.12-14]. That is, the damping forces are
taken for real or quasi-external forces that resist the motion of an elastic structure, and
hence, attenuate the vibration amplitude, the internal forces, the stresses and the strains
of the elastic structure. In other words, they contribute to the formation of the internal

Chapter 1: Introduction
10
elastic forces, stresses and strains of the elastic structures only indirectly, through the
formation of the dynamic displacements. From the dynamic displacements evaluated
by solving the differential equation (or equations) of motion of an elastic structure, the
internal elastic forces, stresses and strains developed in the structure can be determined
via static analysis, without any further influence from the damping forces [37 pp.27-28].
Thus, on the basis of given dynamic displacements, the current structural analysis and
design become quite independent of the damping forces. This independence is the in-
evitable consequence of the classical postulate that the damping forces express the dy-
namic resistance of a real or quasi-external environment or equally that the internal elas-
tic forces and stresses do not include damping components.
These classical views were subjected to a critique [78], which identified a contradiction
in the classical continuum approach to the dynamics of an elastic column. This critique
became the stimulus for a further research [79], [80] embodied in the present thesis.
1.3. DAMPING EFFECT OF THE GENERALIZED HOOKE’S LAW
1.3.1. The real potential of the generalized Hooke’s law
The generalized Hooke’s law is a linear relation between stresses and strains applied to
an infinitesimal element (that is, an element tending to become a point) of an elastic
continuum [2 p.97], [10 p.45]. It can compactly be described in matrix notation [20
pp.14-16], [29 pp.17-20] as follows
x, y,z;t x, y,z x, y,z;t σ κ ε , (1.9)
where , ,x y z represent the coordinates that define a point with reference to the un-
strained (natural) configuration of the system.
x, y,z;tσ stands for the stress column matrix with elements the six stress com-
ponents xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ at the point x, y,z of the system, at time t . These stress
components act on the six sides of an infinitesimal orthogonal parallelepiped with edges
parallel to the coordinate axes and deform it, while only their infinitesimal differences
in any pair of opposite sides can offer motion to it [see Ch.2, sec 2.3, Fig. 2.1].
x, y,z;tε stands for the strain column matrix with elements the six strain com-

Chapter 1: Introduction
11
ponents xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ at the point x, y,z of the system, at time t .
x, y,zκ stands for a 6 6 symmetric square matrix of elastic constants at the
point x, y,z of the system. These elastic constants for an isotropic elastic material de-
pend upon two parameters only: the modulus of elasticity (Young’s modulus) E and
Poisson’s ratio ν [20 pp.15-16], [29 p.19].
In an infinitesimal element, where by definition the generalized Hooke’s law applies, all
its points possess infinitesimal relative velocities and accelerations, and hence, the same
absolute velocity, which means that the infinitesimal element deforms statically irre-
spective of its motion as a particle. In other words, the stress components of the infini-
tesimal element that are responsible for its deformation (i.e. strains) do not relate to any
motion of the infinitesimal element as a particle, thereby having to be in static equilib-
rium (i.e. balance), which explains why we hereafter call them balanced stress compo-
nents. Only the stress derivatives xx yx zxσ x , τ y , τ z , , which, although result
in infinitesimal stress differences and negligible strains all over the infinitesimal ele-
ment, constitute finite internal body forces (i.e. forces per unit of volume), can cause
motion of the infinitesimal element as a particle in addition to that caused by the exter-
nal body forces. Therefore, the elastic stresses and strains applied to an infinitesimal
element must comply with the stress-strain relation governing the static deformation of
the element. Since it is practically impossible to test directly with infinitesimal ele-
ments, the unique possibility to identify any stress-strain relation governing the static
deformation is to test with static deformations of finite structures.
As is well known, a finite structure deforms statically, that is, with negligible relative
velocities and accelerations between all its points, only under infinitesimal rates of load-
ing, the so-called static conditions of loading. For static deformation all over the struc-
ture, a homogeneous and uniform rod-like specimen subject to axial loading will pos-
sess at all its points the same axial stress equal to the applied external axial stress. Fur-
ther, realizing that the strain is but a derivative of a displacement function with respect
to the position, which obeys the mean value theorem [45 pp.31-32], it is deduced that
there exists at least one point of the specimen with strain equal to the mean strain of the
specimen. This latter is defined as the ratio of the change of the specimen length to its
initial magnitude. Hence, there will be at least one point of the specimen where the
stress-strain relation will equal the relation between the applied external axial stress and

Chapter 1: Introduction
12
the mean strain all over the specimen. This stress-strain relation will apply to all points
of the specimen, if it is a single-valued function of only the stress. Such a single-valued
relation can easily be identified by measuring the applied external stress and the corre-
sponding change of the specimen length. Thus, identifying a stress-strain relation as a
single-valued function of only the stress seems to be experimentally meaningful under
static conditions of loading of a homogeneous and uniform rod-like specimen.
Although static conditions (i.e. infinitesimal rates) of loading cannot be realized, the ex-
periment with very small rates of loading indicates a roughly linear stress-strain relation
for the static deformation of a specimen, which is deemed to be an estimate of the gen-
eralized Hooke’s law as applied to an infinitesimal element. Recalling that an infini-
tesimal element deforms statically for either static or dynamic conditions of loading, it
follows that the generalized Hooke’s law as applied to an infinitesimal element must
hold true irrespective of the static or dynamic conditions of loading.
The idealization of the generalized Hooke’s law as an exact linear stress-strain relation
at a point has been founded on 1) the indirect measurement of the relation as an external
force-displacement relation of a finite specimen [2 p.96] and 2) the consideration of
static conditions of loading, which implies infinitesimal relative velocities and accelera-
tions within the finite specimen. However, no test can physically realize static condi-
tions of loading or apply to an infinitesimal (i.e. point-like) specimen and directly
measure the stress-strain relation at a point. Hence, the actual stress-strain relation at a
point can roughly be approximated by only an experimental stress-strain relation of a
very slowly loaded finite specimen. That is, any apparent experimental discrepancy
from the idealization of the generalized Hooke’s law as an exact linear stress-strain rela-
tion at a point can be ascribed to the action of non-static slow loading conditions instead
of the unrealizable static ones and to the indirect measurement of the law by means of a
finite specimen instead of its direct measurement by means of an unrealizable infini-
tesimal specimen. On this theoretical basis can be explained the hysteresis loops relat-
ing external stresses (loads) to specimen-length changes in cyclic loading tests. Thus,
the generalized Hooke’s law as an exact linear stress-strain relation at a point can be
consistent with the experimental evidence offered by a statically loaded finite specimen.
This is the real meaning of the classical postulate that in the case of small deformations,
the simplest and most rational form of a static stress-strain relation is a linear form [6
p.67]. The linear form through the implied superposition principle certainly allows of
accounting for any hereditary physical circumstances whatsoever in the relation.

Chapter 1: Introduction
13
1.3.2. Nonconservative nature of the internal stresses in a continuum
The dynamic deformation of a continuum imparts an accelerated motion to all its infini-
tesimal elements as rigid particles [81 p.261] in addition to their own static deforma-
tions mentioned above. The motion can be thought of as an effect of the unbalanced
components xx yx zxσ x dx, τ y dy, τ z dz, of the internal stresses (i.e. stress
differences) acting on the opposite sides of the parallelepiped boundary surface of each
infinitesimal element and the external body forces applied to it. This action is described
by the classical differential equations of motion of the continuum [2 p.85 eq.(15)]
2yxxx zx x
2
2xy yy zy y
2
2yzxz zz z
2
τσ τ uX ρ
x y z t
τ σ τ uY ρ
x y z t
ττ σ uZ ρ
x y z t
(1.10)
where the stress derivatives xx yx zxσ x , τ y , τ z , represent the finite internal
body forces of the infinitesimal element formed by the infinitesimal unbalanced compo-
nents xx yx zxσ x dx, τ y dy, τ z dz, of the internal stresses. By equations
(1.10), the stress derivatives xx yx zxσ x , τ y , τ z , acting as internal body forces
together with the external body forces X ,Y ,Z produce the kinetic energy of the system.
X ,Y ,Z stand for the components of the external body forces per unit of volume
of the infinitesimal element along the x, y, z coordinate axes, respectively.
x y zu ,u ,u stand for the displacements of the infinitesimal element along the
x, y, z coordinate axes, respectively.
ρ stands for the mass density of the continuum.
Within the frame of the classical differential equations of motion (1.10), it is quite clear
that the total work performed by the internal stresses all over a continuum includes not
only the strain energy of the continuum, but also the part of the kinetic energy of the
continuum done by the action of the stress derivatives xx yx zxσ x , τ y , τ z , as

Chapter 1: Introduction
14
internal body forces. This latter energy depends not only on the final displacements
x y zu ,u ,u all over the continuum, but also on the corresponding velocities x y zu ,u ,u .
That is, the total work of the stress derivatives xx yx zxσ x , τ y , τ z , equals the
kinetic energy of the continuum minus the total work of the external body forces
X ,Y ,Z , and hence, it cannot be a single-valued function of only the final displacements
x y zu ,u ,u all over the continuum. Therefore, the total work performed by the internal
stresses of the continuum cannot be uniquely derived from the final displacements
x y zu ,u ,u all over the continuum, which indicates nonconservative internal stresses.
If the continuum obeys the generalized Hooke’s law, then only the strain energy (and
not the total work of the internal stresses, which also includes the total work of the
stress derivatives xx yx zxσ x , τ y , τ z , ) will uniquely be defined by the final
strains x y zu x , u y , u z , , and hence, by the final displacements x y zu ,u ,u all
over the continuum. In other words, only the balanced (i.e. with zero resultant at each
point) components of the elastic internal stresses, which are responsible for the strain
energy of the continuum, can be classified as conservative stresses [38 pp. 90-91].
To understand this elastic situation, we can consider only surface tractions acting on the
continuum. So, the whole of the kinetic energy of the continuum is produced by the
stress derivatives xx yx zxσ x , τ y , τ z , , which means that the total work per-
formed by the internal stresses developed in the elastic continuum equals the strain en-
ergy plus the kinetic energy done by the stress derivatives. As a consequence, to deter-
mine the total work performed by the elastic internal stresses, we should know not only
the final displacements x y zu ,u ,u , but also the velocities x y zu ,u ,u all over the contin-
uum. This conclusion indicates the nonconservative nature of the stress derivatives
xx yx zxσ x , τ y , τ z , as internal body forces, thereby indicating the nonconser-
vative nature of the internal stresses of an elastic continuum obeying the generalized
Hooke’s law (1.9). Only under the special condition
0
0
0
yxxx zx
xy yy zy
yzxz zz
τσ τ
x y z
τ σ τ
x y z
ττ σ
x y z
(1.11)

Chapter 1: Introduction
15
which corresponds to static (i.e. motionless) deformation of the continuum, the total
work of the internal stresses all over the continuum becomes equal to the strain energy
of the continuum. Then, the generalized Hooke’s law (1.9) ensures that the total work
of the internal stresses is uniquely defined by the final displacements x y zu ,u ,u all over
the continuum, which implies the conservative nature of the elastic internal stresses.
On this base therefore, damping must be considered as inherent in any continuum dy-
namically deforming, thereby being an effect of the generalized Hooke’s law.
1.3.3. The error in the classical approach to conservative elastic stresses
As exposed in the preceding paragraph, within the frame of the generalized Hooke’s law
(1.9), it is the nonconservative nature of the internal body forces formed by the stress
derivatives xx yx zxσ x , τ y , τ z , that makes the internal stresses be classified as
nonconservative stresses. However, the nonconservative nature of the internal body
forces xx yx zxσ x , τ y , τ z , has been neglected by the classical continuum ap-
proach, which led to the conventional illusion of conservative total elastic stresses.
To see the classical error, let us consider an elastic continuum in the form of a uniform
and homogeneous line system along axis x , with length L and cross-sectional area A ,
which presents an axial displacements u x,t . In this case, the generalized Hooke’s law
(1.9) can be put into the one-dimensional continuous formulation
u x,t
x,t Ex
, (1.12)
where x,t and u x,t x stand for the stress and the longitudinal strain, respec-
tively, at the level x of the rod, at the time moment t ,
E stands for the elasticity modulus (Young’s modulus) of the rod.
The classical continuum approach applies the generalized Hooke’s law in the one-
dimensional continuous formulation (1.12) and gets
2
2
x,t u x,tE
x x
. (1.13)

Chapter 1: Introduction
16
Then, it describes the axial displacements u x,t as a Fourier series with respect to a
system of orthogonal functions [33 pp.378,397], [37 pp.633,641],
n n
n
u x,t x q t
, (1.14a)
1
2
0 0
d
L L
n n nq t x dx u x,t x x
-
, (1.14b)
where nq t stands for a generalized displacement.
n x represents a function belonging to a family of orthogonal functions,
which are called natural modes and by their definition possess the property
0
d 0
L
ν nx x x for ν n . (1.15)
The natural modes nφ x for 0 1 2n , , , are classically determined by solving the ei-
genvalue equation of the continuous system for homogeneous (i.e. zero) boundary val-
ues. The eigenvalue equation has the form [27 p.217], [35 pp.417-420]
22
2
d0 with
d
nn n n
φ xκ φ x κ =cons tant
x. (1.16)
Further, by assuming termwise differentiability of the infinite series (1.14a), viz.
2 2
2 20
d
d
nn
n
u x,t φ xq t
x x
, (1.17a)
2 2
2 20
d
d
nn
n
u x,t q tφ x
t t
, (1.17b)
and after having used the eigenvalue equation (1.16), equation (1.13) becomes
22
20 0
d
d
nn n n n
n n
x,t xE q t E x q t
x x
. (1.18)

Chapter 1: Introduction
17
In view of the above equations, the total work σ xW done by the stress derivatives
σ x,t x all over the line system, when every point x moves from its equilibrium po-
sition up to a displacement u x,t , can be given the form
0 0
d d
L t
σ x
σ x,τW A u x,τ τ x
x
2
0 00 0
d d
L t
n n n n n
n n
E A κ φ x q τ φ x q τ τ xτ
. (1.19)
On account of the Fourier series (1.14) and applying the orthogonality property (1.15),
the work σ xW becomes
2 2 2 2 2
0 00 0 0
d d d2
L t L
σ x n n n n n n n
n n
E AW E A κ φ x q τ q τ x κ q t φ x x
22
0 2 0
0
d2
Ln
nLn
n
κE Au x,t φ x x
φ x dx
. (1.20)
Thus, assuming the termwise differentiability (1.17), the Fourier series (1.14) makes the
total work σ xW of the stress derivatives σ x,t x all over the elastic line system be
a single-valued function of only the displacements u x,t of the line system, thereby
making the stress derivative σ x,t x behave as conservative internal body force.
Here is the error in the classical approach to conservative elastic stresses. Actually, the
Fourier series (1.14) cannot conclude any conservative character of the elastic internal
body forces σ x,t x without the arbitrary classical assumption that the Fourier se-
ries representation of the response (1.14a) can be differentiated term by term.
As a matter of fact, the Fourier series (1.14) is but the continuous formulation of a self-
evident linear matrix transformation of the displacement matrix tU onto a column
matrix tq with elements the so-called generalized displacements nq t , for a given
square matrix multiplier Φ with columns the so-called natural (or normal) modes nφ ,

Chapter 1: Introduction
18
1
N
n n
n
t t q t
U Φ q φ . (1.21)
Indeed, as the set of the N discrete cross sections tends to include all the cross sections
of the system, that is, as N tends to become infinite, it is reasonable that the displace-
ment matrix tU , the column matrix nφ and the matrix relation (1.21) can be equally
put in the continuous formulations u x,t , n x and (1.14), respectively.
Moreover, the Fourier series in the matrix form (1.21) can be differentiated term by
term because of the finite number N of the terms included. That is,
1
N
n n
n
t t q t
U Φ q φ . (1.22)
On the contrary, in accordance with the classical mathematical theory of infinite series
[44 pp. 24-31], [45 p.88], [82 pp.261-262], [83 Vol.1 pp.81-82, Vol.2 pp.280-283], [84
pp.118-121], [85 pp.122-144,264-282], [86 pp.342-344], [87 Vol.1 p.384], the Fourier
series (1.14) does not necessitate the validity of the termwise differentiability (1.17).
Instead, as Sokolnikoff noticed [44 p.24], “Moreover, it is frequently desirable to obtain
the derivative (or integral) of a function f x by means of term-by-term differentiation
(or integration) of an infinite series that defines f x . Unfortunately, such operations
are not always valid, and many important investigations have led to erroneous results
because of the improper handling of infinite series.” And exactly, this thesis shows that
such an important investigation with erroneous results is the classical approach to con-
servative elastic stresses based on the termwise differentiability of the Fourier series
representation of the elastic displacement response.
1.4. DISCRETE EQUIVALENT OF THE GENERALIZED HOOKE’S LAW
1.4.1. Deformation at a point of a continuum in terms of the displacement matrix
The dynamic deformation of a finite continuum is generally characterized by non-
negligible relative accelerations, or equally, by varying with time relative velocities be-
tween the points of the continuum, which cannot ensure any time-independent propor-

Chapter 1: Introduction
19
tions between the deformation displacements of the continuum. Thus, the matrix coef-
ficient of proportionality between the matrix x, y,z;tu of the displacements at an arbi-
trary point x, y,z of the finite continuum and the displacement matrix tU of the con-
tinuum must in general depend on time. As a consequence, it can be written as the sum
of a time-independent matrix coefficient x, y,za plus a time-dependent matrix coeffi-
cient x, y,z;ta , that is,
x, y,z;t x, y,z x, y,z;t t u a a U . (1.23)
Through time differentiation, the general relation (1.23) yields
x, y,z;t x, y,z x, y,z;t t x, y,z;t t u a a U a U , (1.24)
which for static (i.e. motionless) deformation defined as [20 pp.275-276], [25 p.1]
0 and 0x, y,z;t t t finite t finite u U U U , (1.25)
results in the static property
0 0x, y,z;t for static deformation with t finite a U . (1.26)
Consequently, for the ideal case of static deformation with 0t finite U , there can-
not exist a time-dependent magnitude x, y,z;ta , and hence, there can only exist the
time-independent term x, y,za in the general relation (1.23). Also, for a sufficiently
dense net of discrete application points of the displacement matrix tU and small
strains, the magnitude x, y,z;ta may become sufficiently small in comparison with
the magnitude x, y,za [20 pp.271-272]. Hence, we can consider
x, y,z;t x, y,z t u a U (1.27)
as an exact relation for static finite deformations, or as a good approximation for small
strains and sufficiently dense net of application points of the displacement matrix tU .

Chapter 1: Introduction
20
Taking into account that the strain matrix x, y,z;tε at a point x, y,z is derived from
the displacement matrix x, y,z;tu at the point by differentiation with respect to the
coordinate variables x,y,z , equation (1.23) implies the general relation
x, y,z;t x, y,z x, y,z;t t ε b b U , (1.28)
with x, y,zb and x,y,z;tb resulting from differentiating the elements of matrices
x, y,za and x, y,z;ta , respectively, with regard to the coordinate variables x,y,z .
Equation (1.28) reflects the possibility that a continuum may for different strain distri-
butions x, y,z;tε have common displacements at a number of discrete points, that is,
the same displacement matrix tU . As a matter of fact, this possibility implies differ-
ent histories of applied loads (i.e. concentrated external loads, surface tractions and ex-
ternal body forces), thereby implying different histories of the loading matrix tP .
Even for a very large number of discrete application points of the displacement matrix
tU , so that the magnitude x, y,z;ta will become negligible, the magnitude
x,y,z;tb can be considerable and considerably vary with the history of the applied
loads, and hence, with the time. Indeed, if we keep the displacement matrix tU con-
stant, then, irrespective of the number of its discrete points of application and the small
distances between any neighbouring two of these points, we can considerably change
the strain distribution x, y,z;tε , and hence, the magnitude x,y,z;tb , by properly
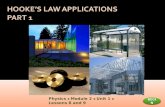
changing the applied loads. This possibility appears in Fig. 1.1, for a line system.
Fig. 1.1: Different deformation curves for the same displacement matrix
u x,t
x
1x
1x 2x Nx
2u
1u
0u

Chapter 1: Introduction
21
In Fig. 1.1, the same displacement matrix tU with different strain distributions
x, y,z;tε is sketched for a line system with its displacement matrix tU having ap-
plication points 1 2 Nx ,x , ,x . The solid line 1u and the dashed line 2u represent two dif-
ferent displacement curves (displacement distributions) with common displacements at
the points 1 2 Nx ,x , ,x and quite different slopes, that is, quite different strains, at points
1 2 Nx ,x , ,x and most other points. A sufficient condition for equation (1.27) to be a
good approximation of the actual relationship between x, y,z;tu and tU , which
leads to small finite differences between 1u and 2u , is a very dense net of application
points of the displacement matrix tU and small strains [20 pp.271-272]. But, even
this sufficient condition cannot suffice for a single-valued relation between x, y,z;tu
and tU , which allows of very different relationships between x, y,z;tε and tU .
Through time differentiation, the general relation (1.28) yields
x, y,z;t x, y,z x, y,z;t t x, y,z;t t ε b b U b U , (1.29)
which for static (i.e. motionless) deformation defined as [20 pp.275-276], [25 p.1]
0 and 0x, y,z;t t t finite t finite ε U U U , (1.30)
results in the static property
0 0x, y,z;t for static deformation with t finite b U . (1.31)
Consequently, for only the ideal case of static deformation with 0t finite U , there
cannot exist a time-dependent magnitude x,y,z;tb , and hence, there can only exist
the time-independent term x, y,zb in the general relation (1.28), that is,
0x, y,z;t x, y,z t for static deformation with t finite ε b U U . (1.32)
Surprisingly, classical analysis [20 p.271] considers that equations (1.27) and (1.32) can
reliably describe dynamic deformation. Actually, if this were true, then an infinitesimal

Chapter 1: Introduction
22
displacement matrix d tU as an additional excitation would require an infinitesimal
time to propagate in a finite distance from its points of reference up to the arbitrary
point x, y,z and form the corresponding infinitesimal displacement d x, y,z;tu and
strain d x, y,z;tε . This necessitates that the velocity of propagation of deformation
should be infinite, which, however, is impossible (physically inconsistent), and hence,
indicates that equations (1.27) and (1.32) contradict dynamics. To avoid this contradic-
tion, we can introduce due correction factors x, y,z;ta and x,y,z;tb in equations
(1.27) and (1.32), respectively, thereby introducing equations (1.23) and (1.28).
On the other hand, equations (1.27) and (1.32) cannot comply with any infinitesimal
displacement matrix d tU , since by definition require the restriction 0t finite U ,
which deprives these equations of any applicability to dynamic deformation.
Besides, using the static equations (1.27) and (1.32) in dynamics leads to an undamped
vibration of the continuum [20 pp.271-272 eq.(10.36)], which not only contradicts the
nonconservative nature of internal stresses dealt with in par. 1.3.2 and 1.3.3 and Ch. 2,
but also, after total unloading at 0t U , implies no return to the initial unstrained con-
figuration, thereby contradicting the definition of elastic behaviour. In contrast, using
the general equations (1.23) and (1.28) leads to a damped vibration of the continuum,
which, after total unloading at 0t U , implies return to the initial unstrained configu-
ration, in line with the definition of elastic behaviour. In short, damping is a require-
ment for an elastic body dynamically excited to recover its initial unstrained configura-
tion after total unloading at 0t U , and it is physics underlying dynamic deformation
that dictates the introduction of equations (1.23) and (1.28).
1.4.2. Principle of virtual work and matrix equation of motion for elastic continua
The matrix equation of motion of an elastic continuum subject to dynamic loading is
formulated by means of the generalized Hooke’s law (1.9) and the principle of virtual
work [88]-[93]. Recalling that in any continuum, by Newton’s third axiom of action
and reaction, the total work of the internal stresses (consisting of the strain energy and
the work of the stress derivatives) equals the total work of the surface tractions [80
p.399], [81 p.262], the principle of virtual work proves to be equivalent to Newton’s
second axiom (1.10), and hence, valid for either conservative or nonconservative inter-

Chapter 1: Introduction
23
nal stresses. The principle of virtual work can be expressed as [20 p.267 eq.(10.3)]
dTin
VW t U t x, y,z x, y,z;t x, y,z;t V u u , (1.33)
where x, y,z stands for the mass density at the point x, y,z of the system.
V stands for the total volume of the system.
T as an upper index stands for the operator of transposing a matrix.
stands for the operator of virtual variations. By definition, the virtual varia-
tions ε , u and U are instantaneous, infinitesimal and compatible with each other.
W t , inU t and dT
Vx,y,z x,y,z;t x,y,z;t V u u stand for the vir-
tual work of the external body forces and surface tractions, the resulting virtual strain
energy and the resulting virtual kinetic energy, respectively, all over the continuum.
The virtual strain energy inU t by definition equals [20 p.267 eq.(10.4)]
dTinU t x, y,z;t x, y,z;t V ε σ , (1.34)
while the virtual work W t of the external loads equals [20 p.267 eq.(10.5)]
d dT T
V SW t x, y,z;t x, y,z;t V x, y,z;t x, y,z;t S u X u T , (1.35)
with x, y,z;tX and x, y,z;tT denoting the column matrix of external body forces
at a point of the continuum and the column matrix of surface tractions (i.e. external
stresses) at a point of the boundary surface S of the continuum, respectively.
The principle of virtual work (1.33) applies to any continuum ruled by Newton’s second
and third axioms and exclusively subject to the action of external body forces and sur-
face tractions and small deformations [2 pp.93-95 eq.(6)]. It can serve as the complete
energy balance governing the dynamic behaviour of the continuum, on the assumption
that no energy form other than that of the work of external body forces and surface trac-
tions can enter or escape from the continuum [80]. Thus, the principle of virtual work
(1.33) allows the study of the continuum dynamics without recourse to any heat losses.

Chapter 1: Introduction
24
On account of the relationships (1.23) and (1.28), the virtual displacement x, y,z;tu
and the virtual strain x, y,z;tε must equal
x, y,z;t x, y,z x, y,z;t t
x, y,z;t x, y,z x, y,z;t t
u a a U
ε b b U
(1.36)
while the acceleration x, y,z;tu must equal
2x, y, z;t x, y, z x, y, z;t t x, y, z;t t x, y, z;t t u a a U a U a U . (1.37)
By virtue of relations (1.35) and (1.36) and Hooke’s law (1.9), the equations for the vir-
tual variations inU , W and dT
VV u u can equally be rewritten as follows
Δ Δ Δδ d dT T T Tin
V VU V V
U U b κ b b κ b b κ b b , (1.38)
Δ Δδ d dT T T T T
V SW V S
U a a X a a T , (1.39)
d δ dT T T
V VV V u u U U a a
+ Δ Δ Δ dT T
VV
U a a a a a
Δ Δ2 dT T
VV U a a a
Δ Δ dT T
VV U a a a . (1.40)
Inserting equations (1.38), (1.39) and (1.40) in the principle of virtual work (1.33) and
taking into account that the virtual displacement matrix δ TU is arbitrary, we conclude
the following general matrix equation of motion
Δ t t t t t t t t M M U C U K K D U P , (1.41)

Chapter 1: Introduction
25
where M denotes a constant mass matrix,
Δ tM denotes a matrix of inertia fluctuation per acceleration,
tC denotes a matrix of inertia fluctuation per velocity,
tD denotes a matrix of inertia fluctuation per displacement,
K denotes a constant stiffness matrix,
tK denotes a stiffness fluctuation matrix,
tP denotes a loading matrix (i.e. a matrix of equivalent external forces),
and are all defined in terms of integrals of the magnitudes x, y,za , x, y,z;ta ,
x, y,zb , x, y,z;tb , x, y,zκ , x, y,z;tX , and x, y,z;tT , as below
Δ Δ Δ
Δ Δ
Δ Δ
Δ Δ Δ
Δ Δ
d
d
2 d
d
d
d
d d
T
V
T T
V
T T
V
T T
V
T
V
T T
V
T T T T
V S
V
t V
t V
t V
V
t V
t V S
M a a
M a a a a a
C a a a
D a a a
K b κ b
K b κ b b κ b b
P a a X a a T
(1.42)
By equations (1.40), (1.41) and (1.42), t tD U , t tC U , Δ t tM U are inertial,
forces, while t t K K U is a stiffness force producing all strain energy inU .
Besides, the dependence of the factors x, y,z;ta and x, y,z;tb on the loading his-
tory of the continuum is transferred to the resulting magnitudes Δ tM , tC , tD and
tK , which indicates the nonlinear character of the matrix equation (1.41).
Matrix equations (1.41) and (1.42) define the discrete equivalent of the partial differen-
tial equation or equations of motion of the elastic continuum and express the correct
transformation of the dynamics of an elastic continuum into equivalent dynamics of a
discrete system [94], [95]. This transformation represents the essence of what is classi-
cally termed as matrix or finite element methods of structural analysis [96]-[107].

Chapter 1: Introduction
26
It is worth noting that the matrix equation (1.41) comes in full harmony with Scanlan’s
observation stating in terms of Fourier analysis that “variable stiffness (and even mass)
with frequency and amplitude are more the rule than the exception” [77 pp.500-501].
1.4.3. Discrete equivalent of the continuum formulation of Hooke’s law
Since the static (i.e. motionless) deformation presupposes equations (1.27) and (1.32),
that is, Δ Δ 0 a b , it is deduced that the mass matrix M represents the at-rest mass of
the discrete system. The same mass matrix M may also be considered as the dynamic
mass of the system, owing to deformation velocities insignificant in relation to the ve-
locity of light. Then, by Newton’s second axiom, the matrix tF of the internal forces
in the discrete system must equal t t M U P , and hence, equation (1.41) implies
Δt t t t t t t t F K K D U C U M U , (1.43)
with the minus sign indicating that the internal forces tF resist deformation as ex-
pressed by the displacement matrix tU , the velocity matrix tU and the acceleration
matrix tU . The above formulation actually represents the correct discrete equivalent
of the continuum formulation (1.9) of the generalized Hooke’s law. It is worth empha-
sizing that this discrete equivalent includes the stifness component t t K K U ,
which by equation (1.38) is responsible for all strain energy inU t with its coefficient
t K K resembling the complex stiffness for structural damping [35 p.154], [77
p.502], and the inertia components t tD U , t tC U and Δ t tM U .
In view of definitions (1.42), the component tK U of the internal force matrix tF
describes conservative internal forces while the other four components t t K U ,
t tD U , t tC U and Δ t tM U describe nonconservative internal forces, and
hence, internal damping in the elastic continuum. Indeed, the components t t K U
and t tD U describe nonconservative internal forces because their virtual works
T t t t U K U and T t t t U D U for given displacement matrix tU de-
pend not only on the variation tU but also on the time-dependent matrix tK and

Chapter 1: Introduction
27
the time-dependent matrix tD . The component t tC U describes nonconservative
internal forces because its virtual work T t t t U C U for given displacement ma-
trix tU depends not only on the variation tU but also on the the time-dependent
matrix tC and the velocity matrix tU . Similarly, the component Δ t tM U de-
scribes nonconservative internal forces because its virtual work ΔT t t t U M U
for given displacement matrix tU depends not only on the variation tU but also
on the time-dependent matrix Δ tM and the acceleration matrix tU .
It is obvious that the equivalent discrete formulation (1.43) of the generalized Hooke’s
law (1.9) differs substantially from the classical discrete formulation of Hooke’s law
t t classical discrete form of the generalized Hooke' s law F K U . (1.44)
Besides, the discrete equivalent (1.43) of the continuum formulation (1.9) of Hooke’s
law cannot refer to conservative internal forces and can only be reduced to the conserva-
tive discrete formulation (1.44) of Hooke’s law for only static deformation, which im-
plies Δ Δ 0x, y,z;t x, y,z;t a b , and hence, Δ 0t t t t K D C M .
On this base therefore, for dynamic deformation, it is equation (1.43) that describes the
real discrete equivalent of the continuum formulation of the generalized Hooke’s law
(1.9) and not the classical equation (1.44). Only for static deformation, that is, for
Δ Δ 0x, y,z;t x, y,z;t a b , and hence, for Δ 0t t t t K D C M , the clas-
sical discrete formulation (1.44) of Hooke’s law, which expresses conservative interac-
tions between the mass points of a discrete system, coincides with the equivalent dis-
crete formulation (1.43) of the generalized Hooke’s law (1.9).
1.4.4. Elastic-viscous form of the equation of motion of an elastic continuum
The resultant of the nonconservative components t t K U , t tD U , t tC U
and Δ t tM U of the internal force matrix tF may be expressed in terms of the ve-
locity matrix tU and an equivalent viscous damping matrix eq tC as follows

Chapter 1: Introduction
28
Δeq t t t t t t t t t C U K D U C U M U , (1.45)
which allows the discrete equivalent (1.43) of the continuum formulation (1.9) of
Hooke’s law to be equally rewritten in the general elastic-viscous form
eqt t t t F K U C U , (1.46)
and the matrix equation of motion (1.41) to be equally rewritten as
eqt t t t t M U C U K U P . (1.47)
As mentioned in par. 1 and 2.1, for sufficiently small distances between any neighbour-
ing two of the discrete points of application of the displacement matrix tU , the mag-
nitude x, y,z;ta becomes negligible. Consequently, 0t t t M C D , which
reduces the matrix equation of motion (1.41) to
t t t t M U K K U P (1.48)
and the matrix equation (1.45) to
eq t t t t C U K U , (1.49)
with the loading matrix tP reduced to
d dT T
V St x, y,z x, y,z;t V x, y,z x, y,z;t S P a X a T (1.50)
and the stiffness deviation matrix tK analytically defined by
Tt x, y,z x, y,z x, y,z;t K b κ b
dT x, y,z;t x, y,z x, y,z x, y,z;t V b κ b b . (1.51)

Chapter 1: Introduction
29
The reduced equation of motion (1.48) simplifies the computation of the actual dynamic
response of the elastic continuous structures exposed in section 6.2 of Chapter 6.
Within this frame, equation (1.41), as well as its reduced form (1.48), indicates that the
classical elastic-viscous discrete model and the damped motion described by equation
(1.47) are actually representative of the elastic continuum model ruled by the general-
ized Hooke’s law (1.9), which overturns conventional wisdom.
1.4.5. Strain energy as a non-single-valued function of the displacement matrix
We now focus on the nonconservative nature, and hence, on the internal damping con-
tent, of the internal forces t t K K U , recalling two classical postulates:
First, the work of the internal forces t t K K U along the displacement matrix
tU by equations (1.38) and (1.42) equals the strain energy of an elastic continuum.
Second, the forces of a system are classified as conservative if their total work is a sin-
gle valued function of only the displacements of their application points [38 pp.90-91].
According to the analysis of par. 1.4.1, the strains x, y,z;tε of an elastic continuum,
and hence, the stresses x, y,z;tσ derived by means of the generalized Hooke’s law
(1.9) from the strains x, y,z;tε , cannot be single-valued functions of only the dis-
placement matrix tU . Therefore, the total work of the elastic stresses x, y,z;tσ
along the strains x, y,z;tε , that is, the strain energy of the elastic continuum, cannot
be a single-valued function of only the displacement matrix tU . This implies that the
strain energy of an elastic continuum cannot be equal to the work done along the dis-
placement matrix tU by a conservative matrix tF of the internal elastic forces de-
veloped in the discrete equivalent of the continuum; for the work of a conservative in-
ternal force matrix tF should by definition be a single-valued function of only the
displacement matrix tU . Consequently, the strain energy of an elastic continuum
must be represented by the work of a nonconservative matrix tF of the internal elas-
tic forces developed in the discrete equivalent of the continuum. For this reason, the
conservative internal force matrix tK U in the matrix equation of undamped motion

Chapter 1: Introduction
30
t t t M U K U P (1.52)
cannot represent the strain energy of an elastic continuum, which means that this matrix
equation of motion cannot consistently describe the motion of an elastic continuum. In
fact, the strain energy must be the sum of the works of the conservative internal force
matrix tK U and the nonconservative internal force matrix t t K U in line with
equation (1.38) for the virtual variation inU of the strain energy inU t .
1.4.6. Damping and structural design
According to the current procedure of structural analysis and design [37 pp.12,27-28],
by using experimental data for damping ratios, the viscous-damping matrix eq tC is
approximated as a constant matrix eqC and this constant matrix is inserted in the matrix
equation of motion (1.47). The mass and stiffness matrices M and K result from the
time-independent matrix functions x, y,za and x, y,zb , which correspond to static
deformation of the elastic continuum [20 p.272]. Solving the matrix equation of motion
(1.47) under the simplification eq eqt C C , the displacement matrix tU is evaluated.
The elastic strains x, y,z;tε are derived from the displacement matrix tU according
to the classical assumption (1.32), which actually represents static deformation, while
the elastic stresses x, y, z;tσ are derived from the elastic strains x, y,z;tε via the
generalized Hooke’s law (1.9). That is, the elastic strains x, y,z;tε and stresses
x, y,z;tσ in the current structural design against dynamic loading are derived from the
displacements tU by means of a static analysis for each time moment t .
It is worth emphasizing that after estimating the displacement matrix tU , any further
contribution of the internal damping forces eq t t C U to the structural analysis and
design is conventionally considered as inappropriate [37 p.28].
Actually, for dynamic deformation, the elastic strains x, y,z;tε must be derived from
the displacement matrix tU according to the correct equation (1.28), which substan-
tially differs from the classically used static equation (1.32). Hence, there may develop

Chapter 1: Introduction
31
considerable differences between the real strains given by the correct equation (1.28)
and the classically computed strains related to the static equation (1.32), which discloses
a weak point in classical structural analysis and design with adverse influence on the
structural safety. In fact, the classical computation of strains may suffer from a possible
underestimation of the actual strains developed in an elastic continuous system. Indeed,
the classical computation is based on the assumption that 0x, y,z;t x, y,z;t a b ,
which implies zero internal damping forces or equally 0eq t C , which if put in the
matrix equation of motion (1.47) leads to far larger displacements tU than the classi-
cally evaluated ones for given loading. In short, the consistency of the classical ap-
proach related to the assumption 0x, y,z;t x, y,z;t a b requires that no internal
damping forces be considered, namely, 0eq t C , which by increasing the displace-
ments tU will lead to an increase of the computed elastic strains x, y,z;tε . Accord-
ingly, establishing this indispensable consistency by solving the matrix equation of mo-
tion (1.47) for 0eq t C would be a first step for practically improving the classical
approach to structural analysis and design against dynamical loading.
The improvement of the accuracy of the classical approach by increasing the number
and decreasing the distances between any neighbouring two of the discrete application
points of tU [20 pp.271-273] cannot replace the need for the above consistency. This
is due to the fact that the strains cannot obey the classical relation (1.32) for dynamic
deformation even for very large number (and hence, for very small finite distances be-
tween any neighbouring two) of the discrete points of application of the displacement
matrix tU , as shown in par. 1.4.1.
A general iterative method for a unified computation of the actual strain and stress ma-
trices x, y,z;tε and x, y,z;tσ together with the displacement matrix tU of an elas-
tic continuous system is described in Chapter 6.
1.4.7. Explanation of the experimental stress-strain relation
Although the generalized Hooke’s law (1.9) is a linear stress-strain relation at a point,
the stress-strain relation derived from experiments with dynamically loading elastic
specimen is nonlinear (that is, depending on stress and strain rates) [35 p.152 eq.(3.48)],
[75 pp.68-71 eq.(2.42)]. This is classically taken as a sign of insufficiency of the gener-

Chapter 1: Introduction
32
alized Hooke’s law (1.9) for dynamic deformation [35 p.152] or more generally of a de-
fect in the law even for static deformation [2 p.120]. However, in view of the general
matrix equation of motion (1.41) for an elastic continuum, the discrepancy between the
law and the experiment proves to be an illusion resulting from inappropriate comparison
of the law’s predictions and the experiment’s results.
Actually, for a homogeneous and uniform rod-like elastic specimen with negligible in-
ertia forces Δ 0t t t t t t M M U C U D U , subjected to an axial load
P t that produces a relative displacement u t between the ends of the specimen, the
matrix equation of motion (1.41) of the system simplifies to
t t t P K K U , (1.53)
which can be put in the analytical formulation
P t k k t u t , (1.54)
and equally be rewritten as
P t u tLk k t
A A L , (1.55)
where k and k t express the constant stiffness matrix K and the time-dependent
stiffness fluctuation matrix tK , respectively, of the elastic specimen as a single-
degree-of-freedom system,
L and A stand for the initial length and the cross-section area, respectively, of
the elastic specimen.
Realizing that P t A , u t L and k L A represent the externally applied stress t ,
the mean strain t all over the length of the specimen and the Young modulus of elas-
ticity E of the specimen, respectively, equation (1.55) can equally be rewritten as
L
t E k t t E tA
, (1.56)

Chapter 1: Introduction
33
which complies with the experimental evidence for the stress-strain relation governing
the elastic specimen as a whole.
In analogy with the matrix equation (1.49), we can transform k t u t as below
eqk t u t c t u t , (1.57)
where eqc t denotes an equivalent viscous-damping coefficient of the elastic speci-
men as a single-degree-of-freedom system.
Evidently, by using relation (1.57), equation (1.55) can be given the equivalent form
eq
P t u t u tL Lk c t
A A L A L. (1.58)
Realizing that u t L represents the time-rate of the mean strain t all over the
length of the specimen, equation (1.58) may equally be rewritten as
eq
Lt E t c t t E t
A , (1.59)
which complies with the experimental evidence for the stress-strain relation governing
the elastic specimen as a whole.
In view of the fact that the matrix equation of motion (1.48) underlying the stress-strain
relations (1.56) and (1.59) is founded on the generalized Hooke’s law (1.9), the stress-
strain relations (1.56) and (1.59) must be results of the generalized Hooke’s law (1.9)
for dynamic deformation, thereby not contradicting the law, despite conventional belief.
After all, the generalized Hooke’s law (1.9) by its very definition relates stresses and
strains at the same point, while the stress-strain relation (1.56) or (1.59) relates the ex-
ternal stress applied to the ends of a finite specimen and the mean strain all over the
specimen, which are not stress and strain at the same point. In short, either of the stress-
strain relations (1.56) and (1.59) can explain the experimental stress-strain relation de-
rived from the elastic specimen in full harmony with the generalized Hooke’s law (1.9).

Chapter 1: Introduction
34
1.5. OUTLINE OF THE THESIS
The thesis is an inquiry into the nature of the damping phenomenon inherent in the dy-
namics of elastic structures. The core finding is that damping components of the elastic
stresses, that is, stress work losses or equally internal damping, appear as an effect of
the generalized Hooke’s law. This finding overturns the classical view that the general-
ized Hooke’s law exclusively refers to conservative stresses and restores the agreement
between the law and the experimental evidence for stress work losses.
The work is divided into seven chapters and one appendix:
Chapter 1 is an introduction referring to the main findings and relating the thesis to
other works in the relevant field of research. It also serves as a condensed analysis of
all core points of the thesis, with emphasis on the matrix approach to the damping char-
acteristics of an elastic continuous system.
Chapter 2 first elucidates the concepts of elasticity, the classical continuum model of de-
fining internal stresses, and the conservative and nonconservative forces and stresses.
Then, with reference to these concepts, it concludes the nonconservative nature of the
elastic stresses developed within any continuous system and in particular that obeying
the generalized Hooke’s law. Further, it analyzes the errors in the classical approach to
conservative elastic stresses, and shows that an elastic system, whether continuous or
discrete, cannot be conservative.
Chapter 3 explains why an elastic discrete system cannot be conservative and why the
discrete equivalent of the continuum formulation of the generalized Hooke’s law should
include a damping term.
Chapter 4 criticises the classical continuum approach to the undamped free vibration of
the taut string as representative of the elastic behaviour of continuous systems. It shows
that the undamped character of the free vibration is strictly founded on arbitrary classi-
cal assumptions added to Bernoulli’s transformation and the d’Alembert wave process.
Abandoning these arbitrary assumptions allows the classical approach to conclude that
in general the free vibration of the taut string must be damped.
Chapter 5 criticises the classical continuum approach to the undamped forced vibration

Chapter 1: Introduction
35
of an elastic continuous system such as that represented by an elastic uniform column
subjected to an axial load at its free end. It shows that the undamped character of the
forced vibration is strictly founded on arbitrary classical assumptions added to Ber-
noulli’s transformation. Abandoning these arbitrary assumptions allows the classical
approach to conclude that in general the forced vibration of an elastic continuous system
must be damped.
Chapter 6 suggests a general iterative method for the theoretical computation of the ac-
tual displacement matrix of an elastic continuous system and the actual strain matrix at
an arbitrary point of the system, which is based on the estimation of the actually time-
dependent matrix coefficient of the proportion between the displacement matrix and the
strain matrix. And also, it offers an improvement of the current structural design re-
garding the estimation of the actual strain matrix from the actual displacement matrix of
a continuous system, whether elastic or not.
Chapter 7 summarizes the conclusions deduced from the foregoing chapters.
Appendix presents in further details the analysis underlying my paper of 1996 on the
critique of the dynamics of the elastic continuous systems [78], so that the reasoning of
the paper and its connection to the present work will be clarified.

36
CHAPTER 2
NONCONSERVATIVE NATURE OF
INTERNAL STRESSES IN CONTINUUM DYNAMICS
2.1. GENERAL
The stresses in an elastic continuum (i.e. a continuum with zero strains after unloading)
are classically deemed to be conservative (i.e. their total work all over the continuum is
a single-valued function of only the displacement distribution in the continuum).
Actually, the total work of the internal stresses all over a deformable continuum equals
the total work of the surface tractions, which proves to be not a single-valued function
of only the displacement distribution in the continuum, thereby assuring the nonconser-
vative nature of the internal stresses, whether the continuum is elastic or not. Only
statically deforming elastic continua can possess conservative internal stresses.
The nonconservative nature of the internal stresses or forces of an elastic continuum
obeying the generalized Hooke’s law actually means that the spatial derivatives of these
stresses or forces behave as nonconservative internal body forces. These latter, how-
ever, appear to be conservative in the classical analysis because of arbitrary assumptions
imposed on their treatment. Abandoning these arbitrary assumptions, the classical
analysis leads to nonconservative stress or force derivatives in the elastic continuum.
2.2. CONSISTENCY OF ELASTICITY WITH DAMPING
The demarcation of science from metaphysics can be crystallized as follows [108 p.1]:
“Every scientific theory starts from a set of hypotheses, which are suggested by our ob-

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
37
servations, but represent an idealization of them. The theory is then tested by checking
the predictions deduced from these hypotheses against experiment. When persistent
discrepancies are found, we try to modify the hypotheses to restore the agreement with
observation. If many such tests are made and no serious disagreement emerges, then the
hypotheses gradually acquire the status of ‘laws of nature’. When results that appar-
ently contradict well-established laws appear, as they often do, we tend to look for other
possible explanations-for simplifying approximations we have made that may be wrong,
or neglected effects that may be significant.”
On this base therefore, the discrepancy between the classical hypothesis that “elastic
means an absence of damping forces” [109] and the observation of damping and hys-
teresis loops in elastic continuous systems [2 p.120] calls for a reasonable explanation.
That is, we need to carefully investigate and re-examine whether or not the real nature
of the stresses developed in the continuum model of the elastic bodies is conservative.
As is well known, elasticity consists in a force-deformation or stress-strain relation,
which allows a structure to recover its initial unstrained configuration, thereby exclud-
ing any residual strains, after removing the applied loads [2 p.92], [5 p.1]. In Sokol-
nikoff’s words: “A body is called elastic if it possesses the property of recovering its
original shape when the forces causing deformations are removed. The elastic prop-
erty is characterized mathematically by certain functional relationships connecting
forces and deformations.” [5 p.1]. A body is therefore inelastic if it exhibits residual de-
formation (residual strains) after loading removal.
Bodies are modelled as continuous or discrete systems. In both models, elasticity, by its
very definition, does not impose any absence of damping forces, notwithstanding the
classical hypothesis that “elastic means an absence of damping forces” [109]. After all,
if elastic meant absence of damping forces, then abruptly removing all loads would lead
an elastic continuous system to an everlasting free undamped vibration, which cannot
comply with the classical definition of elasticity mentioned above (i.e. no strains after
unloading). Besides, a lot of engineering structures (e.g. buildings or bridges subject to
earthquakes or winds, aircrafts subject to air flow) can undergo damped vibrations with
no residual strains after unloading. Such a structural behaviour rather indicates that
damping complies with elasticity and ‘elastic’ may be ‘damped’ as well as ‘inelastic’ is.
On the other hand, the hypothesis that ‘elastic’ means ‘undamped’ [109] not only is ar-
bitrary but also requires that no damping surface tractions (i.e. external stresses) be ap-

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
38
plied to an elastic body. Indeed, owing to the classical boundary stress conditions [7
pp.28-29,236], the internal elastic stresses at a point of the boundary surface of an elas-
tic continuum must equal the surface tractions applied at this point. So, if ‘elastic’
meant ‘undamped’ [109], then the internal elastic stresses could not include damping
components, and hence, neither could the surface tractions. That is, in the classical
view, elasticity cannot comply with nonconservative surface tractions, which implies
that these two entities cannot coexist in nature. However, in nature, we can realize
nonconservative surface tractions (e.g. velocity-dependent wind surface tractions) ap-
plied to elastic bodies, which indicates that nonconservative stresses, and hence, damp-
ing, can comply with elasticity despite the classical view that ‘elastic’ means
‘undamped’. Moreover, this indication has theoretically been justified [80].
2.3. CLASSICAL MODEL OF INTERNAL STRESSES
We shall first review the classical model of internal stresses in a continuum and specify
what the internal stresses and their spatial derivatives, the total work of the internal
stresses, the strain energy and the kinetic energy are and how they are interrelated.
Let us consider a deformable body as a continuum subjected to dynamical deformation
by externally applied loads. Owing to the deformation of the whole body, an infinitesi-
mal element of the body deforms and also moves as if it were a rigid particle. Thus, the
energy supplied by the deformation of the whole body to the infinitesimal element con-
sists of two parts: the strain energy due to the deformation of the element itself and the
kinetic energy due to the motion of the element as a rigid particle [81 p.261].
We now focus on the infinitesimal element, which is sketched in Fig. 2.1 as an orthogo-
nal parallelepiped for an interior element, or an orthogonal triangular pyramid with base
on the boundary surface of the body for a boundary element, with dimensions d d dx, y, z
[6 pp.22-23]. Its interactions with the adjacent infinitesimal elements as well as the sur-
face loading externally applied to it in the case of a boundary element may be repre-
sented as stresses acting on the boundary surface of the element, which are herein called
internal stresses. The internal stresses act in addition to possible body forces externally
applied to the volume of the element. The total work performed by the internal stresses
acting on the infinitesimal element during the transition from the unstrained configura-
tion (i.e. the natural configuration with no deformation) of the body to its strained (de-

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
39
Fig. 2.1: (a) The total stresses on the boundary surface of an infinitesimal element.
(b) The total stresses of an infinitesimal element on the boundary surface
of a continuous structure.
zzσ
zxτ zyτ
yyσ yxτ
yzτ yzτ
xzτ
xxσ
xyτ
T
y
z
x
(b)
T = surface traction
zzσ (a)
dyy
yy
σσ y
y
yyσ
yzτ
yxτ
yxτ
xzτ
xyτ
zyτ zxτ
dzzzz
σσ z
z
dyz
yz
ττ y
y
dyx
yx
ττ y
y
dzxzx
ττ z
z
dzy
zy
ττ z
z
dzxzx
ττ z
z
y
x
z
xyτ
xxσ
dxxxx
σσ x
x
dxzxz
ττ x
x
dxy
xy
ττ x
x

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
40
formed) configuration consists of two parts: The work of the balanced components of
the internal stresses and the work of the unbalanced components of the internal stresses.
The balanced components of the internal stresses of the infinitesimal element, that is,
the classical stresses xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ acting at the element’s three pairs of oppo-
site sides with a zero resultant force, are exclusively responsible for the deformation of
the infinitesimal element, and their work equals the strain energy of the element.
The unbalanced components of the internal stresses of the infinitesimal element, that is,
the internal-stress differences d d dxx yx zxσ x x, τ y y, τ z z, , result in the ac-
tion of the stress derivatives xx yx zxσ x , τ y , τ z , as internal body forces, which
together with the externally applied body forces are exclusively responsible for the mo-
tion of the element as described by the differential equations [2 p.85 eq.(2.14)]
2yxxx zx x
2
2xy yy zy y
2
2yzxz zz z
2
τσ τ uX ρ
x y z t
τ σ τ uY ρ
x y z t
ττ σ uZ ρ
x y z t
(2.1)
where xx yx zxσ x , τ y , τ z , represent internal body forces per unit of volume
of the infinitesimal element, which result from the unbalanced components of the inter-
nal stresses d d dxx yx zxσ x x, τ y y, τ z z, . These latter are negligible as
compared with the balanced components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ , and hence, cannot af-
fect strains and strain energy, notwithstanding their ability to produce finite motion.
X ,Y ,Z stand for the components of the external body forces per unit of volume
of the infinitesimal element along the x, y, z coordinate axes, respectively,
x y zu ,u ,u stand for the displacements of the infinitesimal element along the
x, y, z coordinate axes, respectively,
ρ stands for the mass density of the continuum.
From the above differential equations it follows [2 p.94] that the sum of the work done
by the internal body forces xx yx zxσ x , τ y , τ z , and the work done by the ex-

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
41
ternal body forces X ,Y ,Z equals the kinetic energy of the infinitesimal element. As a
consequence, the work done by the internal body forces acting on an infinitesimal ele-
ment, i.e. the stress derivatives xx yx zxσ x , τ y , τ z , , constitutes a portion of the
kinetic energy of the infinitesimal element.
Within this frame, for either an infinitesimal element of a body or the entire body, the
total work of the internal stresses, the strain energy and the portion of the kinetic energy
done by the stress derivatives xx yx zxσ x , τ y , τ z , are interrelated as follows
Total work of int ernal stresses strain energy kinetic energy by stress derivatives= + . (2.2)
It is emphasized that in many vibration problems only surface loads act on the struc-
tures. In this case, equations (2.1) imply that the kinetic energy done by the stress de-
rivatives xx yx zxσ x , τ y , τ z , equals the total kinetic energy of the body.
2.4. THE NOTION OF CONSERVATIVE FORCES AND STRESSES
Actually, a stress is but a surface force per unit area [2 p.74], [5 p.36], [10 p.47], [110
pp.4-8]. And as such, a stress at a point (i.e. at a side of an infinitesimal parallelepiped)
is conservative as long as the surface force that results from the stress is conservative.
In the classical theory [27 p.247], [38 pp.90-91], [44 pp.390-391,418], [111 pp.3-4],
[112 pp.347,360-361], an individual force is classified as conservative, if its work done
along any path traced by its application point is a single-valued function of only the po-
sitions of the end points of the path, thereby being independent of the path and zero
along any closed path.
Let us now consider a system of interacting mass points whose configuration deforms
under a loading. The deformation of the configuration consists in different displace-
ments of the mass points around their equilibrium positions (i.e. the positions defining
the unstrained configuration), and can completely be described by the displacement vec-
tors of the mass points relative to their equilibrium positions [20 pp.11,29], [38 pp.162-
163]. As an effect of the deformation, internal forces develop within the system. In line
with the mentioned classical definition of a conservative force, the resultant iF of the
internal forces acting on the i mass point of the system is classified as conservative, if
its work iW done when the i mass point moves from its equilibrium position with zero

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
42
displacement vector up to a position with displacement vector iu is a single-valued
function of only the displacement vector iu , say i iW u . This classical definition is
mathematically expressed as [10 p.3], [38 p. 91 eq.(8-8)], [108 pp.14-15 eq.(2-5)]
0
i i i i iˆd W , for a conservative int ernal force F u u F
iu
, (2.3)
where iu is the integrand variable for the displacement vector iu of the i mass point.
Similarly, the total of the internal forces iF of the system, and hence, their column ma-
trix F , can be classified as conservative, if the sum W of the works of all internal
forces iF done along the displacement matrix U of the system (i.e. the displacements of
the mass points of the system) is a single valued function of only the displacement ma-
trix U [38 p.162], [111 pp.9-11]. This classical definition is mathematically expressed
as follows
0
T ˆd W , for a conservative column matrix of int ernal forces F U U F
U
, (2.4)
where F is the column matrix of the internal forces acting on the mass points,
U is the column matrix of the displacements 1 2 N, , ,u u u of the mass points,
U is the integrand variable for the displacement vector U ,
W U represents the sum of the works of the internal forces iF as a single-
valued function of only the displacement matrix U ,
T as an upper index denotes the transpose of the matrix indexed.
Within this frame of classical theory, by analogy with the conservative total of the in-
ternal forces [38 p.93], the total of the internal stresses in a continuum can be classified
as conservative, if and only if their total work is a single-valued function of only the
displacement distribution in the continuum. This latter condition means that the bal-
anced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ at x,y,z , which define the stress tensor
x, y,z;tσ , and the stress derivatives xx yx zxσ x , τ y , τ z , , which result from
the unbalanced stress components d d dxx yx zxσ x x, τ y y, τ z z, and define

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
43
the internal body forces at x,y,z , perform works whose sum all over the continuum is
a single-valued function of only the displacement distribution in the continuum.
2.5. EQUAL WORKS OF INTERNAL STRESSES AND SURFACE TRACTIONS
By Newton’s third law of action and reaction, the internal stresses of two adjacent in-
finitesimal elements acting on their common boundary are equal with opposite direc-
tions, thereby performing zero total work. And hence, the total work of the internal
stresses all over the body equals the total work of the internal stresses acting on the
body’s boundary surface, which is not common boundary of adjacent elements [81
pp.261-262]. Thus, by virtue of the classical boundary stress conditions, i.e. equality of
the internal stresses on a body’s boundary surface with the surface tractions (that is to
say, the external stresses) [7 pp.28-29,236], the total work of the internal stresses all
over a body must equal the total work of the surface tractions.
On this base therefore, the internal stresses developed all over a continuum can be clas-
sified as conservative if and only if the total work of the surface tractions is a single-
valued function of only the displacement distribution in the continuum.
2.6. NONCONSERVATIVE NATURE OF THE INTERNAL STRESSES
2.6.1. Multi-valued relation of displacements and the total work of internal stresses
As exposed in par. 2.4, for conservative internal stresses in a continuum, the sum of the
works performed by the balanced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ and the
stress derivatives xx yx zxσ x , τ y , τ z , all over the continuum should be a sin-
gle valued function of only the displacement distribution in the continuum.
However, the above single-valuedness cannot actually be satisfied, which proves that
the internal stresses are nonconservative, thereby including damping components.
Indeed, according to the classical model of internal stresses exposed in par. 2.3, the dis-
placement at each point of a continuum depends only on the history of the external body
forces X ,Y ,Z and the stress derivatives xx yx zxσ x , τ y , τ z , acting at the point
and ruling the motion of the point via equations (2.1), and not on the balanced stress

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
44
components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ at the point. After all, the balanced stresses acting on
the boundary of the infinitesimal element surrounding the point build up a zero resultant
force, which cannot influence the motion (and hence, the displacement) of the point.
Let us now consider a continuum subjected to a given history of surface tractions
x y zT ,T ,T and external body forces X ,Y ,Z , which, owing to the linearity of the differen-
tial equations of motion (2.1) and the boundary stress conditions, implies a unique his-
tory of internal stresses xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ [6 pp.128-130], and hence, a unique his-
tory of stress derivatives xx yx zxσ x , τ y , τ z , , all over the continuum. These
histories of the stress derivatives xx yx zxσ x , τ y , τ z , and the external body
forces X ,Y ,Z by equations (2.1) define a unique history of accelerations x y zu ,u ,u ,
thereby defining a unique history of displacements x y zu ,u ,u , all over the continuum.
If we also applied to the continuum a parallel history of arbitrary additional surface trac-
tions Δ Δ Δx y zT , T , T in combination with a parallel history of such additional external
body forces Δ Δ ΔX , Y , Z that by means of equations (2.1) counterbalance any develop-
ing additional stress derivatives Δ Δ Δxx yx zxσ x , τ y , τ z , , viz.
Δ Δ Δ Δ 0
Δ Δ Δ Δ 0
Δ Δ Δ Δ 0
xx yx zx
xy yy zy
xz yz zz
σ x τ y τ z X
τ x σ y τ z Y
τ x τ y σ z Z
(2.5)
then, we could retain the same history of accelerations, thereby retaining the same his-
tory of displacements, as without the parallel history of additional surface tractions and
additional external body forces. This possibility proves that the same history of dis-
placements in a continuum can be related to different histories of surface tractions, and
hence, to different works of surface tractions. Thus, the work of the surface tractions of
the continuum, and hence, the total work of the internal stresses all over the continuum,
is not a single-valued function of only the displacement distribution in the continuum.
On this base therefore, the internal stresses all over a continuum, whether elastic or not,
must be nonconservative.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
45
Scholium A: The uniqueness of the solution to a given external loading
To show that a given history of surface tractions x y zT ,T ,T and external body forces
X ,Y ,Z implies a unique history of internal stresses xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ and dis-
placements x y zu ,u ,u , we can proceed as follows [6 pp.128-130]
Let us assume that the action of a given history of surface tractions x y zT ,T ,T and exter-
nal body forces X ,Y ,Z may correspond with two different histories of internal stresses,
i.e. I I I I I Ixx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ and II II II II II II
xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ . Either of these stress histories
must satisfy the differential equations of motion (2.1) and the boundary stress condi-
tions (i.e. equality of surface tractions and internal stresses at the boundary)
x xx yx zx
y xy yy zy
z xz yz zz
T σ cos nx τ cos ny τ cos nz
T τ cos nx σ cos ny τ cos nz
T τ cos nx τ cos ny σ cos nz
(A1)
where n denotes the line of the unit normal vector at a point of the boundary surface
and nx , ny , nz denotes the angles between this line and the coordinate axes.
By subtracting each of equations (2.1) formed by II II II II II IIxx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ from the corre-
sponding one formed by I I I I I Ixx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ , we obtain the following system of
equations
I II I II I II 2 I 2 IIxx xx yx yx zx zx x x
2 2
I II I II I II 2 I 2 IIxy xy yy yy zy zy y y
2 2
I II I II I II 2 I 2 IIxz xz yz yz zz zz z z
2
σ σ τ τ τ τ u uρ
x y z t t
τ τ σ σ τ τ u uρ
x y z t t
τ τ τ τ σ σ u uρ
x y z t
2t
(A2)
Similarly, from equations (A1) it follows

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
46
0
0
0
I II I II I IIxx xx yx yx zx zx
I II I II I IIxy xy yy yy zy zy
I II I II I IIxz xz yz yz zz zz
σ σ cos nx τ τ cos ny τ τ cos nz
τ τ cos nx σ σ cos ny τ τ cos nz
τ τ cos nx τ τ cos ny σ σ cos nz
(A3)
Using the principle of superposition, which holds true owing to the linearity of the dif-
ferential equations of motion (2.1) and the boundary stress conditions (A1), we can take
the history of the stress differences in equations (A2) and (A3) as a new history of inter-
nal stresses corresponding with zero surface tractions and zero external body forces.
Actually, there can only exist a history of zero internal stresses in the absence of surface
tractions and external body forces on the base of the hypothesis of the natural state of
the continuum [6 p. 130]. Therefore, the history I I I I I Ixx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ and the history
II II II II II IIxx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ must coincide with a unique history xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ . This,
by equations (A2), directly implies that the histories of accelerations I I Ix y zu ,u ,u and
II II IIx y zu ,u ,u must coincide with a unique history of accelerations x y zu ,u ,u , which, in
turns, implies a unique history of displacements x y zu ,u ,u .
Scholium B: Displacements uniquely defined by accelerations
To explain the postulate underlying the above analysis that the history of accelerations
uniquely defines the history of displacements in a continuum, for given initial condi-
tions, it is worth noting that
B.1. The displacement u x, y,z;t is the integral of the velocity u x, y,z;t , viz.
0
d + 0 t
u x, y,z;t u x, y,z; τ τ u x, y,z;t , (B1)
since the velocity u x, y,z;t is the derivative of the displacement u x, y,z;t , and
integration and differentiation are inverse mathematical processes.
The existence of the acceleration u x, y,z;t as the derivative of the velocity

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
47
u x, y,z;t assures the continuity of the velocity u x, y,z;t with respect to time,
which makes the velocity u x, y,z;t be integrable [85 p.97].
B.2. Similarly, the velocity u x, y,z;t is the integral of the acceleration u x, y,z;t ,
0
d + 0 t
u x, y,z;t u x, y,z; τ τ u x, y,z;t , (B2)
since the acceleration u x, y,z;t is the derivative of the velocity u x, y,z;t .
Assuming the continuity of the acceleration u x, y,z;t , or more generally that the
acceleration u x, y,z;t is bounded and presents only a finite number of disconti-
nuities within the time domain 0, t , assures its integrability [85 p.98].
B.3. Combining equations (B1) and (B2) yields
0 0
d d + 0 0 t τ
ˆ ˆu x, y,z;t u x, y,z; τ τ τ t u x, y,z;t u x, y,z;t , (B3)
where τ , τ stand for integrand variables of the time t , and
0u x, y,z;t , 0u x, y,z;t stand for the initial conditions.
Equation (B3) means that for given initial conditions 0u x, y,z;t and 0u x, y,z;t ,
the deformation displacement u x, y,z;t of a point x, y,z of a deformable body is a
single-valued function of the history of the corresponding acceleration u x, y,z;t of
the point x, y,z from the initiation of the deformation up to time t . In other words,
two cases of acceleration u x, y,z;t of the point with the same history from the initia-
tion of the deformation up to time t imply that the corresponding cases of displacement
u x, y,z;t have the same history. This latter conclusion is what actually justifies the
postulate after equations (2.5) that “then, we could retain the same history of accelera-
tions, thereby retaining the same history of displacements, as without the parallel history
of additional surface tractions and additional external body forces”.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
48
2.6.2. Deformation motion as source of damping
Let us now consider a continuum exclusively subjected to surface tractions, which im-
plies that the external body forces X ,Y ,Z in equations (2.1) are zero. Then, as exposed
in par. 2.3, the differential equations of motion (2.1) necessitate that the total work of
the stress derivatives xx yx zxσ x , τ y , τ z , along the displacements x y zu ,u ,u
equal the work of the accelerating forces x y zu , u , u along the same displace-
ments, which in turn equals the kinetic energy of the continuum. As a consequence, for
a given final configuration of the continuum, the total work of the stress derivatives
xx yx zxσ x , τ y , τ z , done along the transition path from the initial at-rest natu-
ral configuration to the final configuration of the continuum must equal the kinetic en-
ergy of the final configuration. It is quite reasonable that two different transition paths
can lead to the given final configuration but under different final velocities.
Indeed, applying different transition accelerations x y zu ,u ,u for the two transition paths,
which results in different transition stress derivatives xx yx zxσ x , τ y , τ z , , can
lead to the same final displacements (i.e. the same final configuration) under different
final velocities, and hence, different kinetic energies, for the two transition paths.
On this base therefore, for given final displacements, the total work of the stress deriva-
tives xx yx zxσ x , τ y , τ z , along the displacements x y zu ,u ,u all over a continu-
um can take on different values depending on the final velocities applied. This proves
that the stress derivatives xx yx zxσ x , τ y , τ z , of a continuum must act as
nonconservative internal body forces. And since the total work of the stress derivatives
xx yx zxσ x , τ y , τ z , by definition coincides with the total work of the unbal-
anced stress components d d dxx yx zxσ x x, τ y y, τ z z, , it is deduced that
the unbalanced stress components of a continuum must be classified as nonconservative
stress components. Thus, the internal stresses (as sums of balanced and unbalanced
components) of a continuum must be nonconservative.
Only for a static (i.e. motionless) deformation, the total work of the stress derivatives
xx yx zxσ x , τ y , τ z , becomes zero, which allows the internal stresses to be
conservative. This finding assures that the deformation motion of a continuum, whether
elastic or not, is a source of damping.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
49
2.7. STATIC CHARACTER OF CONSERVATIVE INTERNAL STRESSES
Actually, there is a unique case where the requirement of displacements defined by ac-
celerations, as used in par. 2.6.1 for concluding the nonconservative nature of the inter-
nal stresses, cannot be fulfilled, which allows of conservative internal stresses. This
case consists in restricting the differential equations of motion (2.1) to
0
0
0
yxxx zx
xy yy zy
yzxz zz
τσ τX
x y z
τ σ τY
x y z
ττ σZ
x y z
(2.6)
which describe the static (i.e. motionless) deformation of a nonmassles (i.e. with 0ρ )
continuum. In this case, the accelerations by definition become zero, and hence, the
stress derivatives xx yx zxσ x , τ y , τ z , are counter-balanced by the external
body forces X ,Y ,Z at every point of the continuum. This balance implies that the total
work of the stress derivatives xx yx zxσ x , τ y , τ z , must equal the total work of
the external body forces X ,Y ,Z with opposite sign. Consequently, the classification of
the stress derivatives xx yx zxσ x , τ y , τ z , as conservative or nonconservative
must be the same as the classification of the external body forces X ,Y ,Z , which means
that a necessary condition for conservative internal stresses is static deformation.
For a continuum exclusively subjected to surface tractions, that is, for zero external
body forces 0X Y Z , equations (2.6) are reduced to
0
0
0
yxxx zx
xy yy zy
yzxz zz
τσ τ
x y z
τ σ τ
x y z
ττ σ
x y z
(2.7)

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
50
Equations (2.7) imply that the stress derivatives xx yx zxσ x , τ y , τ z , perform
zero work all over the continuum, which, by virtue of equation (2.2), results in
0Total work of conservative int ernal stresses strain energy , for X Y Z = . (2.8)
It is noticed that equations (2.7) and (2.8) are always valid for the massless springs that
connect the rigid lumped masses of a discrete system, since these springs constitute con-
tinua with zero mass density 0ρ and zero external body forces 0X Y Z .
2.8. CRITICAL POINTS ON THE CLASSICAL VIEW OF ELASTIC STRESSES
For an elastic continuum obeying the generalized Hooke’s law, the internal stresses at a
point are linear functions of only the strains at the point [2 pp.97-100 eq.(11)], [6 pp.81-
83 eqs.(3.23),(3.27)], which can be expressed in the matrix formulation [20 p.16]
x, y,z;t x, y,z x, y,z;t σ κ ε , (2.9)
where x, y,z;tσ , x, y,z;tε and x, y,zκ stand for the stress tensor as the column
matrix of the balanced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ , the strain tensor as the
column matrix of the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ , and the square matrix of constant
elastic coefficients, respectively, at the point x,y,z of the elastic continuum.
The strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ at a point are defined as the space derivatives of the
displacement distribution at the point, thereby being single-valued functions of the dis-
placement distribution in the continuum. By the generalized Hooke’s law (2.9), the
same must hold true for the balanced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ . And be-
sides, owing to the linearity of the law, the work done by all balanced stress components
xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ of a point along its strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ proves to be a
single-valued function of the strains [7 pp.244-246 eq.(132)], and hence, of the dis-
placement distribution. Consequently, the total work of the balanced stress components
xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ for all points of an elastic continuum, i.e. the strain energy of the

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
51
continuum, must be a single-valued function of the strains [7 p.247 eq.(135)], and
hence, of the displacement distribution in the continuum. Accordingly, in view of the
notion of conservative internal stresses discussed in par. 2.4, the elastic balanced stress
components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ must be conservative. This latter, on account of the
nonconservative nature of the internal stresses shown in par. 2.6.1, leads to the conclu-
sion obtained in par. 2.6.2 that the stress derivatives xx yx zxσ x , τ y , τ z , of an
elastic continuum obeying the generalized Hooke’s law (2.9) must be nonconservative.
Indeed, each of the stress derivatives xx yx zxσ x , τ y , τ z , at a point does work
along any displacement component of the point that cannot be expressed in terms of
only the stress derivative or the displacement component, because these two latter mag-
nitudes at a point are not single-valued functions of each other. Thus, the total work of
the stress derivatives xx yx zxσ x , τ y , τ z , all over an elastic continuum can be
a non-single-valued function of the displacement distribution in the continuum, which
allows the stress derivatives xx yx zxσ x , τ y , τ z , to be nonconservative.
As a matter of fact, the transition from one to another configuration of an elastic contin-
uum obeying the generalized Hooke’s law may follow different histories (paths) of
strains, and hence, of internal stresses and stress derivatives, notwithstanding the same
end configurations. Of course, the same end configurations assure that the strain-energy
component of the work of all internal stresses of the elastic continuum remains the same
for any history of the transition, thereby remaining equal to its value under static condi-
tions of transition. So, if the work of all internal stresses of the elastic continuum were
a single-valued function of only the displacements of the end configurations of the tran-
sition, then it would be equal to its value under static conditions of transition, thereby
being equal to its strain-energy component. Hence, its kinetic-energy component
caused by the stress derivatives xx yx zxσ x , τ y , τ z , would be zero for any de-
formation motion, with the result that only equations (2.7) could comply with the gener-
alized Hooke’s law. This result in view of equation (2.8) contradicts any nonzero ki-
netic energy, and hence, any dynamic deformation, of the elastic continuum under sur-
face tractions only. Therefore, the classical view that the work of all internal stresses of
an elastic continuum under dynamic deformation is a single-valued function of only the
displacements of the end configurations of the transition cannot hold true. Actually, it is
the nonzero work of the stress derivatives xx yx zxσ x , τ y , τ z , of an elastic
continuum obeying the generalized Hooke’s law that makes the work of all internal
stresses be not a single-valued function of only the displacements.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
52
2.9. ORIGIN OF THE VIEW OF CONSERVATIVE ELASTIC STRESSES
In so far as I know, the origin of the classical view that the elastic stresses are conserva-
tive goes back to the first edition of Love’s “The Mathematical Theory of Elasticity” in
1892. Love concluded that the First Law of Thermodynamics as applied to a body with
sufficiently small deformations may be given the form [2 pp.92-95 eq.(2.7)]
d d d d d d d d d d dxx xx yy yy zz zzx y z x y z σ ε σ ε σ ε U Q
d d d d d dxy xy yz yz xz xzτ γ τ γ τ γ x y z , (2.10)
where dU denotes the increment of the intrinsic-energy density U at a point of the
body, acquired in an infinitesimal interval of time dt . The intrinsic-energy density U
by definition consists of the total non-kinetic energy density of the body at a point,
thereby depending on the body’s strain and temperature at the point [2 pp.93,95].
dQ denotes the equivalent mechanical value of the increment of the heat density
Q supplied at a point of the body in an infinitesimal interval of time dt .
Moreover, if the deformations of any element of the body take place adiabatically (i.e.
no heat is gained or lost), which implies d 0Q , equation (10) yields [2 p.95 eq.(8)]
d d d d d d dxx xx yy yy zz zz xy xy yz yz xz xzσ ε σ ε σ ε τ γ τ γ τ γ U , (2.11)
and hence, the intrinsic-energy density U becomes equal to the strain-energy density
only [2 p.95]. Evidently, equation (2.11) implies
xx yy zz xy yz xzxx yy zz xy yz xz
σ , σ , σ , τ , τ , τε ε ε γ γ γ
U U U U U U, (2.12)
if dU is an exact (also called perfect) differential [27 pp.246-247], [55 pp.103-105] with
respect to the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ , which means that the strain-energy density
U (and hence, each of the balanced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ ) at a point
is a single-valued function of only the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ at the point. Such a
strain-energy density U , by virtue of the definition of the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
53
at a point as space derivatives of the displacement distribution at the point, is a single-
valued function of only the displacement distribution in the continuum. For this case, to
which classical analysis is confined [2 p.95 eq.(9)], we can only conclude that the bal-
anced components of the total internal stresses, and not the total internal stresses, must
be conservative, since the strain-energy density U at a point comprises the work density
done by only the balanced components of the total internal stresses at the point.
Surprisingly, in the conventional classification of the internal stresses of an elastic con-
tinuum as conservative, the work of the total internal stresses is wrongly reduced to only
the work of the balanced stress components (namely, the strain energy), which arbitrari-
ly omits the work of the unbalanced stress components (i.e. the work of the stress deriv-
atives xx yx zxσ x , τ y , τ z , ). Exactly this wrong reduction has led to the classi-
cal view that the total internal stresses, that is, both of the balanced and unbalanced
stress components, in an elastic continuum must be conservative. Accordingly, all ex-
periments indicating elastic hysteresis (i.e. action of dissipative stress components) have
wrongly been taken for signs that no elastic stress-strain relations can really exist, alt-
hough Love noticed that “the subject, however, is still rather obscure” [2 p.120].
2.10. BERNOULLI’S TRANSFORMATION IN CONTINUUM DYNAMICS
A lot of vibration problems are solved via Bernoulli’s transformation [1 pp.502-522],
nowadays referred to as Fourier series with respect to a set of orthogonal functions
n x [112 pp.488-509], whose one-dimension general formulation equals
0
n n
n
u x,t φ x q t
, (2.13a)
-1
2
0 0
d d
L L
n n nq t x x u x,t x x , (2.13b)
where x stands for the position coordinate of a point along the one-dimension continu-
ous system, with 0x and Lx representing the boundaries of the system.
u x,t stands for the total displacement response of the system.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
54
nφ x denotes one function of a system of orthogonal functions for 0 1 2n , , , ,
which are called natural modes. By definition, the orthogonal functions nφ x possess
the integral property [27 p.228], [35 p.424]
0
d 0
L
n νφ x φ x x for n ν . (2.14)
The natural modes nφ x for 0 1 2n , , , are classically determined by solving the ei-
genvalue equation of the continuous system for homogeneous (zero) boundary values.
nq t stands for the generalized displacement related to the mode nφ x .
In the classical view, by means of Bernoulli’s transformation (2.13) and the generalized
Hooke’s law (2.9), the elastic response u x,t can be uncoupled into a superposition of
undamped vibrations in the generalized displacements nq t . This latter point is con-
ventionally taken for an indication that the internal elastic stresses are conservative.
However, this uncoupling of the partial differential equation of motion of an elastic con-
tinuum is founded either openly [37 p.633 eq.(16.3.3)] or tacitly [109] on the arbitrary
assumption that Bernoulli’s transform (2.13a) is termwise differentiable to the second
order with respect to both variables x and t . Actually, it is this arbitrary assumption
that makes the stresses ruled by the generalized Hooke’s law be conservative, which, on
account of the conservative nature of the balanced stress components related to the gen-
eralized Hooke’s law, means that the corresponding stress derivatives are conservative.
But as shown in the analysis of par. 2.6, 2.7 and 2.8, conservative stresses in a contin-
uum can only develop under static deformation, and hence, the arbitrary assumption
about termwise differentiability of Bernoulli’s transformation can only apply to the
static deformation of the continuum. On this base therefore, use of Bernoulli’s trans-
formation in solving the dynamic problem of a continuum requires nontermwise differ-
entiability of Bernoulli’s transformation, which, however, leads to nonconservative
stress derivatives, thereby leading to damped elastic response.
In the ensuing analysis, a few examples show how Bernoulli’s transformation (2.13), on
the assumption that it is termwise differentiable, makes the stress (or force) derivatives
behave as conservative internal body forces, which corresponds to static deformation.
And then, they show how Bernoulli’s transformation (2.13), on the assumption that it is

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
55
not termwise differentiable, makes the stress (or force) derivatives corresponding to dy-
namic deformation behave as conservative internal body forces.
2.10.1. Longitudinal vibration of an elastic rod
Let us consider that the one-dimension continuous system related to Bernoulli’s trans-
formation (2.13) is a longitudinally vibrating elastic rod of cross-sectional area A . The
mode nφ x satisfies the eigenvalue equation [27 p.217], [35 pp.417-420]
2
20n
n n
ωφ x φ x
c , (2.15)
where c stands for a material constant given by the formula
c E ρ (2.16)
with E and ρ denoting Young’s modulus of elasticity and the mass density of the con-
tinuum, respectively, and
nω stands for a natural angular frequency of the system derived from solution of
the eigenvalue equation for homogeneous boundary values of nφ x [35 pp. 419-423].
The generalized Hooke’s law (2.9) as applied to the longitudinal vibration equals
u x,t
σ x,t Ex
, (2.17)
which only on the assumption of termwise differentiability of Bernoulli’s transform
(2.13a) to the second order with respect to the spatial variable x , that is,
2
20
n n
n
u x,tφ x q t
x
, (2.18)
can lead to the classical expression for the stress derivative σ x,t x

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
56
0
n n
n
σ x,tE φ x q t
x
. (2.19)
Combining equation (2.19), the eigenvalue equation (2.15) and equation (2.16) yields
22
20 0
nn n n n n
n n
σ x,t ωE φ x q t ρ ω φ x q t
x c
, (2.20)
and hence, the total work σ xW of the stress derivatives σ x,t x all over the rod for
its points x moving from their equilibrium positions up to displacements u x,t equals
0 0
d d
L t
σ x
σ x,τW A u x,τ τ x
x
2
00 0
d d
L t
n n n
n
ρ A ω φ x q τ u x,τ τ x
. (2.21)
It is noticed that Bernoulli’s transform (2.13b) and the continuity of the velocity u x,t
resulting from the existence of the acceleration u x,t , in view of the Leibnitz rule [44
p.286], [112 p.348], give
-1
2
0 0
d d
L L
n n nq t x x u x,t x x , (2.22)
which by means of Bernoulli’s transformation (2.13) as applied to the velocity u x,t
with respect to the orthogonal functions nφ x implies that
0
n n
n
u x,t φ x q t
. (2.23)
By virtue of equation (2.23), the orthogonality property (2.14) and Bernouli’s transform
(13b), and after interchanging summation and integration signs and , equation (2.21)
for the work σ xW becomes

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
57
2
0 00 0
d d
L t
σ x n n n n n
n n
W ρ A ω φ x q τ φ x q τ τ x
2 2
0 0 0
d d
L t
n n n n
n
ρ A ω φ x q τ q τ τ x
2 2 2
0 0
d2
L
n n n
n
ρ Aω φ x x q t
-1 2
2 2
0 0 0
d d2
L L
n n n
n
ρ Aω φ x x u x,t φ x x
. (2.24)
Thus, assuming termwise differentiability, Bernoulli’s transformation (2.13) makes the
total work σ xW of the stress derivatives σ x,t x all over the elastic rod be a single-
valued function of only the displacements u x,t of the rod, thereby making the stress
derivatives σ x,t x be conservative internal body forces of the elastic rod. This con-
servative behaviour, and hence, the underlying assumption that Bernoulli’s transforma-
tion (2.13) is termwise differentiable, in view of paragraphs 2.6 and 2.7, necessitates
static deformation, which, however, cannot comply with the dynamic analysis treated.
On account of the above outcome and the dynamic deformation sought, Bernoulli’s
transformation (2.13) must not possess the termwise differentiability (2.18). So, instead
of the equation (2.18), for which a sufficient condition is the uniform convergence of its
right-hand member series, we assume that the derivative 2 2u x,t x merely con-
verges to its Fourier series with respect to the orthogonal natural modes nφ x , viz.
2
20
n n
n
u x,tφ x ψ t
x
, (2.25)
where nψ t denotes a Fourier coefficient representing generalized curvature with its
magnitude given by the formula [44 pp.74-75], [112 p.489]
-1
0 0
d d
L L 22
n n n2
u x,tt x x x x
x
. (2.26)

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
58
The Fourier coefficient nψ t can be put in the formulation
2
2
nn n n
ωψ t q t y t
c , (2.27)
with ny t denoting an appropriate nonzero new generalized displacement magnitude.
This magnitude, for given response function u x,t , and hence, for given 2 2u x,t x ,
can be derived from equations (2.13b), (2.26) and (2.27).
Inserting equation (2.27), and after using the eigenvalue equation (2.15), equation (2.25)
can be rewritten as follows
2
20
n n n
n
u x,tφ x q t y t
x
, (2.28)
which, compared with the termwise differentiability assumption (2.18), discloses that
the new generalized displacement magnitude ny t is but the difference of the actual
coefficient nψ t of the Fourier series (2.25) of the derivative u x,t x from the clas-
sical coefficient nq t dictated by the termwise differentiability assumption (2.18).
Now, combining equations (2.28), (2.17) and (2.15) yields
22
20 0
nn n n n n n n
n n
σ x,t ωE φ x q t y t ρ ω φ x q t y t
x c
, (2.29)
which results in the following formula for the work σ xW
0 0
d d
L t
σ x
σ x,τW A u x,τ τ x
x
2
00 0
d d
L t
n n n n
n
ρ A ω φ x q τ y τ u x,τ τ x
. (2.30)
By virtue of equation (2.23) and the orthogonality property (2.14), equation (2.30) be-
comes equal to

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
59
2 2
0 0 0
d d
L t
σ x n n n n n
n
W ρ A ω φ x q τ y τ q τ x
. (2.31)
We can always relate the generalized displacements ny t and nq t as below
n n n ny t t,q q t , (2.32)
where n nt ,q denotes a scalar coefficient defined as a function of the time t and the
generalized displacement nq t , so that it will ensure equation (2.32).
On account of equations (2.31) and (2.32) it follows
2 2
0 0 0
1 d d
L t
σ x n n n n n n
n
W ρ A ω φ x ζ τ,q q τ q τ τ x
2 2 2
0 0 0
2 d d2
t L
n n n n n n n
n
ρ Aω q t ζ τ ,q q τ q τ τ φ x x
, (2.33)
where the integral 0
d
t
n n n nζ τ ,q q τ q τ τ by its very nature is but a function of all
history of nq t and nq t up to time t , and hence, on account of definitions (2.13b)
and (2.22) for nq t and nq t , respectively, becomes a function of all history of the
displacements u x,t and the velocities u x,t up to time t .
By means of transforms (2.13b) and (2.22), we can replace nq t and nq t in equation
(2.33) and get
-1 2
2 2
0 0 0
d d2
L L
σ x n n n
n
ρ AW ω φ x x u x,t φ x x
0 0 0
2 d d d
t L L
n n n nζ τ ,q u x,t φ x x u x,t φ x x τ
. (2.34)

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
60
The above result indicates that the total work σ xW of the stress derivatives σ x,t x
all over the elastic rod is not a single-valued function of only the displacements u x,t
of the rod at time t . It also is a function of all history of the displacements u x,t and
the velocities u x,t up to time t , which means dependence on the paths formed by the
displacements u x,t fron the initiation of the deformation until time t . This depend-
ence makes the stress derivatives σ x,t x be classified as nonconservative internal
body forces of the elastic rod for the case of a dynamic deformation.
2.10.2. Transverse vibration of a taut string
Let us now consider that the one-dimension continuous system related to Bernoulli’s
transformation (2.13) represents a transversely vibrating taut string. Here, the trans-
verse force of the string plays the role of the elastic stresses while the derivative of the
transverse force of the string plays the role of the elastic stress derivatives. The deriva-
tive V x,t x of the transverse force V x,t is defined as [35 pp.406-407]
2
2
V x,t u x,tT
x x
, (2.35)
which by virtue of the assumption of termwise differentiability of Bernoulli’s transform
(2.13a) to the second order with respect to the spatial variable x becomes
0
n n
n
V x,tT φ x q t
x
, (2.36)
where T and u x,t stand for the constant horizontal tension imposed on the whole of
the taut string and the transverse displacement of the taut string, respectively.
In this case too, the mode nφ x satisfies the eigenvalue equation (2.15) [35 p.419
eq.(9.44)], where the constant c is given now as [35 p.407]

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
61
c T m , (2.37)
with m standing for the mass per unit of length of the string.
Combining equations (2.15), (2.36) and (2.37) results in
22
20 0
nn n n n n
n n
V x,t ωT φ x q t m ω φ x q t
x c
. (2.38)
The total work V xW of the force derivatives V x,t x all over the string for its
points x moving from their equilibrium positions up to displacements u x,t equals
0 0
d d
L t
V x n
V x,τW u x,τ τ x
x
2
00 0
d d
L t
n n n
n
m ω φ x q τ u x,τ τ x
. (2.39)
By virtue of equation (2.23), and after applying the orthogonality property (2.14) and
using Bernouli’s transform (2.13b), equation (2.39) for the work VW becomes
-1 2
2 2
0 0 0
d d
L L
V x n n n
n
W m ω φ x x u x,t φ x x
, (2.40)
in analogy with equation (2.24).
Thus, assuming termwise differentiability, Bernoulli’s transformation (2.13) makes the
total work V xW of the transverse force derivatives V x,t x all over the taut string
be a single-valued function of only the displacements u x,t of the string, thereby mak-
ing the force derivatives V x,t x behave as conservative internal body forces. This
conservative behaviour, and hence, the underlying assumption that Bernoulli’s trans-
formation (2.13) is termwise differentiable, in view of par. 2.7, necessitates static de-
formation, which, however, cannot comply with the dynamic deformation considered.
Consequently, for the real case of a dynamically deformed taut string, Bernoulli’s trans-
formation (2.13) must not possess terwise differentiability, and a procedure similar to

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
62
that followed in par. 2.10.1 gives
-1 2
2 2
0 0 0
d d2
L L
V x n n n
n
mW ω φ x x u x,t φ x x
0 0 0
2 d d d
t L L
n n n nζ τ ,q u x,t φ x x u x,t φ x x τ
. (2.41)
The above result indicates that the total work V xW of the force derivatives V x,t x
all over the taut string is not a single-valued function of only the displacements u x,t
of the string at time t . It also is a function of all history of the displacements u x,t
and the velocities u x,t up to time t , which means dependence on the paths formed by
the displacements u x,t fron the initiation of the deformation until time t . This de-
pendence makes the force derivatives V x,t x be classified as nonconservative in-
ternal body forces of the taut string for the real case of a dynamic deformation.
2.10.3. Bending vibration of an elastic beam
Last, we shall consider that the one-dimension continuous system related to Bernoulli’s
transformation (2.13) represents an elastic uniform beam subjected to bending. Here,
the bending moment of the beam plays the role of the elastic stresses while the deriva-
tive of the shearing force plays the role of the elastic stress derivatives. The derivative
V x,t x of the shearing force V x,t is defined as [35 pp.408-409]
2
2
V x,t M x,t
x x
, (2.42)
where M x,t stands for the bending moment of the beam, which equals [35 p.408]
2
2
u x,tM x,t EI
x
, (2.43)

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
63
with EI and u x,t denoting the elastic bending stiffness and the transverse displace-
ment of the elastic beam, respectively. Then, substituting in equation (2.42) and using
the assumption of termwise differentiability of Bernoulli’s transform (2.13a) to the sec-
ond order with respect to x , it is deduced that
4
40
d
d
nn
n
V x,t φ xEI y t
x x
. (2.44)
Each mode nφ x is classically subject to the limitation of homogeneous boundary val-
ues, while it satisfies the eigenvalue equation [27 p.224], [35 p.425 eq.(9.59)]
4 2
4 2
d0
d
n nn
φ x ωφ x
x c , (2.45)
where the constant c is given now as [35 p.409]
c EI / m , (2.46)
with m standing for the mass per unit of length of the beam.
Combining equations (2.44) and (2.45) yields
22
20 0
nn n n n n
n n
V x,t ωEI φ x q t m ω φ x q t
x c
. (2.47)
The total work VW of the transverse force derivatives V x,t x all over the beam for
each section x moving from its equilibrium position up to the transverse displacement
u x,t is evaluated as follows
0 0
d d
L t
V x n
V x,τW u x,τ τ x
x
2
00 0
d d
L t
n n n
n
m ω φ x q τ u x,τ τ x
. (2.48)

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
64
By virtue of equation (2.23), and after applying the orthogonality property (2.14) and
using Bernouli’s transform (2.13b), equation (2.48) for the work VW becomes
-1 2
2 2
0 0 0
d d
L L
V x n n n
n
W m ω φ x x u x,t φ x x
, (2.49)
in analogy with equations (2.24) and (2.40).
Thus, assuming termwise differentiability, Bernoulli’s transformation (2.13) makes the
total work V xW of the shearing force derivatives V x,t x all over the elastic beam
be a single-valued function of only the displacements u x,t of the beam, thereby mak-
ing the transverse force derivatives V x,t x behave as conservative internal body
forces. This conservative behaviour, and hence, the underlying assumption that Ber-
noulli’s transformation (2.13) is termwise differentiable, in view of the analysis of par.
2.7, necessitates static deformation, which, however, cannot comply with the dynamic
deformation under consideration.
Consequently, for the real case of a dynamically deformed elastic beam, Bernoulli’s
transformation (2.13) must not possess terwise differentiability, and a procedure similar
to that followed in par. 2.10.1 and 2.10.2 gives
-1 2
2 2
0 0 0
d d2
L L
V x n n n
n
mW ω φ x x u x,t φ x x
0 0 0
2 d d d
t L L
n n n nζ τ ,q u x,t φ x x u x,t φ x x τ
. (2.50)
The above result indicates that the total work V xW of the force derivatives V x,t x
all over the beam is not a single-valued function of only the displacements u x,t of the
beam at time t . It also is a function of all history of the displacements u x,t and the
velocities u x,t up to time t , which means dependence on the paths formed by the
displacements u x,t fron the initiation of the deformation until time t . This depend-
ence makes the force derivatives V x,t x be classified as nonconservative internal
body forces of the elastic beam for the case of a dynamic deformation.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
65
2.11. PRINCIPLE OF VIRTUAL WORK, ENERGY LOSSES AND
THE FIRST THERMODYNAMIC AXIOM
Newton’s second axiom, as expressed by equations (2.1), and the equality of the work
of the surface tractions with the work of the internal stresses, as a consequence of New-
ton’s third axiom derived in par. 2.5, imply that the work of surface tractions and exter-
nal body forces equals the sum of the corresponding strain energy and kinetic energy,
whose a form is the principle of virtual work. There is a widely-spread illusion that on
account of this principle, the deformation of a continuum is inconsistent with energy
losses, and hence, with damping, which contradicts this thesis. Actually, the internal
stresses in any continuum undergoing dynamic deformation, whether elastic or not, are
ruled by Newton’s second and third axioms, and hence, the principle of virtual work, ir-
respective of their conservative or nonconservative character.
The principle of virtual work may be expressed as below [20 pp. 264-267 eq.(10.3)]
dTin
VW t U t x, y,z x, y,z;t x, y,z;t V u u , (2.51)
where x, y,z stands for the mass density at the point x, y,z of the system.
V stands for the total volume of the system.
T as an upper index stands for the operator of transposing a matrix.
stands for the operator of virtual variations.
W t , inU t and dT
Vx,y,z x,y,z;t x,y,z;t V u u stand for the vir-
tual work of the external body forces and surface tractions, the resulting virtual strain
energy and the resulting virtual kinetic energy, respectively, all over the continuum.
By definition, the virtual strain energy inU t equals [20 p.267 eq.(10.4)]
dTin
VU t x, y,z;t x, y,z;t V ε σ , (2.52)
and the virtual work W t equals [20 p.267 eq.(10.5)]
d dT T
V SW t x, y,z;t x, y,z;t V x, y,z;t x, y,z;t S u X u T , (2.53)
with x, y,z;tX and x, y,z;tT denoting the column matrix of external body forces

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
66
X ,Y ,Z at a point of the continuum and the column matrix of surface tractions (i.e. ex-
ternal stresses) at a point of the boundary surface S of the continuum, respectively, and
x, y,z;tu , x, y,z;tε , x, y,z;tσ exclusively resulting from these loads.
The principle of virtual work (2.51) applies to any continuum ruled by Newton’s second
and third axioms and small deformations, and exclusively refers to the action of external
body forces and surface tractions [2 pp.93-95 eq.(6)]. It can serve as the complete en-
ergy balance underlying the dynamic behaviour of any continuum subjected to external
body forces and surface tractions, on the assumption that no energy form other than that
of the work of external body forces and surface tractions can enter or escape from the
continuum. Thus, the principle of virtual work (2.51) allows the study of the dynamic
behaviour of the continuum without any recourse to heat losses of the continuum.
Surprisingly, the energy balance expressed by the principle of virtual work (2.51) is
conventionally deemed to be inconsistent with energy losses, and hence, with damping.
This is due to the arbitrary consideration of energy losses as a difference between the
left-hand and the right-hand members of the principle of virtual work (2.51), despite
that the equality of the two members results from Newton’s second and third axioms,
which holds true even for nonconservative forces and stresses. In fact, the energy losses
of a continuum represent but the differences between the values of the work done by the
internal stresses, which, recalling par. 2.5, equal the differences between the values of
the work done by the surface tractions, along loading and unloading the continuum.
And this equality of differences assures that the energy losses related to the work of in-
ternal stresses can escape from or enter the continuum in the form of work of surface
tractions and change accordingly the internal energy content of the natural state of the
continuum. In short, the energy losses are due to the hysteresis loops caused by the
multi-valuedness of the work of internal stresses, which, recalling par. 2.5, implies the
multi-valuedness of the work of surface tractions, for given strains or displacements.
On this base therefore, the principle of virtual work (2.51) must be faced as a particular
form of the first thermodynamic axiom whose both members can include energy losses
or gains in the form of work of stresses only, thereby being consistent with damping.
The first thermodynamic axiom introduces two additional classical magnitudes:
i) The heat Q t externally supplied to the natural state of the continuum until time t .
ii) The internal energy t of the continuum, which is defined as the total energy of

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
67
the continuum [113 p.4], that is, the sum of the supplied work of all external body
forces and surface tractions plus the supplied heat. The latter is transformed into work
of thermal internal stresses resulting from the temperature differences added to the natu-
ral-state temperature of the continuum by the supplied heat and into change of the inter-
nal energy content of the natural state of the continuum.
Then, the first thermodynamic axiom can be expressed by the formula [113 pp. pp.4-5]
t Q t W t , (2.54)
which by virtue of the principle of virtual work (2.51) results in the equality
dTin
Vt Q t U t x, y,z x, y,z;t x, y,z;t V u u . (2.55)
Two interesting corollaries can be deduced from equations (2.51) and (2.55):
1. When 0Q t , then dTin
Vt U t x, y,z x, y,z;t x, y,z;t V u u ,
and the first thermodynamic axiom (2.54) reduces to the principle of virtual work
(2.51).
2. When 0Q t , then dTin
Vt U t x, y,z x, y,z;t x, y,z;t V u u ,
which means that the internal energy t includes an equal to Q t total of strain
and kinetic energy done by thermal internal stresses plus a change of the internal energy
content of the natural state of the continuum, in addition to the mechanical energy
dTin
VU t x,y,z x,y,z;t x,y,z;t V u u . Hence, any heat exchanges be-
tween the continuum and its external environment will have equal thermal effects on the
internal energy t of the continuum, thereby resulting in thermal differences from
the mechanical energy determined exclusively within the frame of the principle of vir-
tual work (2.51). In studying these thermal effects and the resulting stress and strain
differences of the continuum consists the role of the first thermodynamic axiom (2.54).
All in all, the first thermodynamic axiom (2.54) and the principle of virtual work (2.51)
can both account for energy losses, with the difference that the former allows heat to be
added to the work of external body forces and surface tractions and to the energy losses
in the form of work of stresses that characterize the latter.

Chapter 2: Nonconservative Nature of Internal Stresses in Continuum Dynamics
68
2.12. CONCLUDING REMARKS
In this chapter the following main conclusions have been deduced:
The total work of the internal stresses developed in a continuum subjected to dynamic
loading, whether elastic or not, proves to be not a single-valued function of only the
displacement distribution all over the continuum, which means that the internal stresses
are nonconservative, thereby including damping components. This indicates damping
as an inherent effect in the continuum model of dynamics, whether elastic or not.
Actually, the total work of the internal stresses of a continuum does not coincide with
the strain energy of the continuum, but, instead, equals the sum of the strain energy of
the continuum plus the work of the internal body forces formed by the stress derivatives
xx yx zxσ x , τ y , τ z , , with this latter work exclusively contributing to the for-
mation of the kinetic energy of the continuum. And what implies the nonconservative
nature of the internal stresses of an elastic continuum ruled by the generalized Hooke’s
law and undergoing a dynamical deformation is that, in spite of the strain energy, the to-
tal work of the stress derivatives xx yx zxσ x , τ y , τ z , cannot be a single-valued
function of only the displacement distribution all over the continuum.
Conservative internal stresses can only develop for static (i.e. motionless) deformation
of a nonmassles continuum. The static deformation for the case of a continuum exclu-
sively subjected to surface tractions implies zero work of stress derivatives.
Regarding the classical view that the internal stresses of an elastic continuum are con-
servative, which is derived from Bernoulli’s transformation (Fourier’s series), it is
founded on the arbitrary assumption that the transformation is termwise differentiable.
This makes the work of stress derivatives of an elastic continuum appear to be a single-
valued function of only the displacement distribution all over the continuum, thereby
making the stress derivatives appear to be conservative, which can only be compatible
with the static deformation of an elastic continuum.

69
CHAPTER 3
NONCONSERVATIVE NATURE OF INTERNAL FORCES
IN THE ELASTIC DISCRETE SYSTEM DYNAMICS
3.1. GENERAL
As shown in Chapter 2, the total work of the internal stresses all over an elastic contin-
uum cannot be a single-valued function of only the displacement distribution in the con-
tinuum, thereby assuring the nonconservative nature of the internal stresses dynamically
developed in the elastic continuum. As a matter of fact, only statically deforming elas-
tic continua can develop conservative internal stresses.
This finding rather indicates an analogous nonconservative behaviour of the internal
forces developed in an elastic discrete system. Specifically speaking, as shown in
Chapter 1, a dynamically excited elastic continuum proves to be equivalent to a noncon-
servative discrete system, which indicates that an elastic system can only develop non-
conservative internal stresses and forces, thereby presenting damping.
However, there is a strong belief, as expressed in classical literature [38 Ch.V], in the
elastic character of the dynamical behaviour of the conservative discrete systems. But
this belief contradicts two core points of elasticity:
1. The stress or force derivatives developed in an elastic continuum obeying the gener-
alized Hooke’s law actually behave as nonconservative internal body forces, which are
the source of the damping inherent in the continuum [cf Ch. 2]. These stress or force
derivatives, however, appear to be conservative in the classical analysis because of arbi-
trary assumptions imposed on the Fourier series of the continuum response, for which a
sufficient condition is the continuation of the acceleration with respect to time. But, the

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
70
acceleration can actually include finite discontinuities at a finite number of any instants
in time, which leads to nonconservative stress and force derivatives in an elastic contin-
uum obeying the generalized Hooke’s law [cf Ch. 4, 5].
2. A conservative discrete system can only undergo an undamped free vibration that
never stops, thereby retaining permanent strains, after unloading. Hence, such a system
cannot be an elastic system (which by definition means no retaining strains after unload-
ing), except for the case of static deformation (which avoids any free vibration).
On this base therefore, the discrete formulation of the generalized Hooke’s law cannot
be reduced to a conservative interaction law, but it must also include a damping term,
which allows it to represent the so-called “elastic-viscous” model of internal forces.
3.2. DISCRETE VERSUS CONTINUOUS SYSTEMS
There is a widely-spread idea that “in fact, the mathematical formulation of a continu-
ous system is derived as a limiting case of that of a discrete system” [27 p.204]. As a
consequence, an elastic continuum is considered as a limiting case of an elastic discrete
system [114 p.30]. And since, in the classical view, the internal forces of the latter sys-
tem are taken for conservative, the internal stresses of the former system are taken for
conservative too, which, however, has been overturned in the previous chapter.
Actually, continuous and discrete systems are quite different, and the former cannot be
considered as a limiting case of the latter. As is well known, the mass medium and the
deformation medium of a continuous system coincide. On the contrary, a discrete sys-
tem results from discretizing the mass medium from the deformation medium of a real
body and consists of undeformable mass points connected through deformable imagi-
nary massless springs. The undeformable mass points represent absolutely rigid lumped
masses while the forces developed in the massless springs represent the interactions of
the lumped masses. Besides, all the external loading is exclusively imposed on the
mass points. So, the springs of a discrete system are characterized by
1) zero mass density along every spring,
2) zero external body forces along every spring.
These spring characteristics of a discrete system, by virtue of the differential equations

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
71
of motion (2.1), imply that the stress derivatives xx yx zxσ x , τ y , τ z , devel-
oped at any point of the springs have zero sum along each coordinate axis, and hence,
they perform zero work. Thus, on account of equation (2.2), the total work of the inter-
nal stresses developed in any spring of a discrete system must be equal to the strain en-
ergy of the spring. As a consequence, if the strain energy of such a spring is a single-
valued function of the relative displacement of its ends, the internal stresses of the
spring will be conservative, in accordance with the classical classification presented in
par. 2.4 of Chapter 2.
Furthermore, the internal forces acting on the mass points of a discrete system (i.e. the
interactions of the mass points) can be considered as the forces applied by the imaginary
massless springs of the system to the mass points. These latter forces must by Newton’s
third axiom of action and reaction be opposite to the forces applied by the mass points
to the corresponding ends of the imaginary massless springs. This implies that their
works must be opposite as well. And since the work of the forces applied by the mass
points to the ends of the imaginary massless springs equals the strain energy of the
springs, which constitutes the strain energy of the system, the work of the internal forc-
es acting on the mass points of a discrete system equals minus the strain energy of the
system. Hence, the internal forces acting on the mass points of a discrete system can be
classified as conservative as long as the strain energy of the system is a single-valued
function of the displacement matrix tU of the mass points of the system.
To summarize, the conservative nature of the internal forces acting on the mass points
of a discrete system (i.e. the interactions of the mass points), or the conservative nature
of the internal stresses developed in the imaginary massless springs of the discrete sys-
tem, can only result from the single-valuedness of the strain energy of the discrete sys-
tem as a function of the displacement matrix tU of the mass points of the system.
On the other hand, the conservative nature of the internal stresses developed in a
nonmassles continuum requires that the sum of the strain energy of the continuum and
the work of the stress derivatives xx yx zxσ x , τ y , τ z , of the continuum be a
single-valued function of the displacement distribution all over the continuum.
Here is the basic difference between the continuum and the discrete model, which
avoids a continuous system dynamically deformed, whether elastic or not, to be consid-
ered as a limiting case of a discrete system. Only for the case of static deformation of a
continuum exclusively subjected to surface tractions, where, by definition, the work of

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
72
stress derivatives is zero, and hence, the work of internal stresses becomes equal to the
strain energy, the continuum could be considered as a limiting case of a discrete system.
Anyway, the work of the external forces acting on either a continuum or the mass points
of a discrete system proves to be equal to the sum of the strain energy plus the kinetic
energy of the system [38 pp.91-93 eq.(8.13)].
3.3. ELASTIC VERSUS CONSERVATIVE DISCRETE SYSTEMS
If the internal forces of a discrete system (i.e. the resultants of the interactions of the
mass points of the system) are conservative, they can reasonably be described by the
conservative interaction law [38 p.164 eq.(1.5)], [114 pp.19-22 eqs.(2.5),(2.18)]
t t F K U , (3.1)
where tF denotes the column matrix of the internal forces acting on the mass points
of the system,
K denotes the column matrix of the symmetric stiffness matrix of the system. It
is noticed that the symmetry of the stiffness matrix K (i.e. the property TK = K ) re-
flects but the equality of the interactions between any two mass points of the system, in
accordance with Newton’s third law of action and reaction.
tU denotes the displacement matrix of the system.
As can readily be shown, the work W t of the above force matrix tF done when the
mass points of the system move from their equilibrium positions with zero displacement
matrix up to their positions with displacement matrix tU equals a single-valued func-
tion of the displacement matrix tU , that is,
0 0
1d d
2
t t
T Tˆ ˆ ˆW t t t U U
F U U K U U K U , (3.2)
which, in view of par. 2.4, Ch. 2, proves that the force matrix tF represents conserva-
tive forces, and hence, equation (3.2) describes a conservative interaction law.

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
73
Indeed, the conservative interaction law (3.1) represents the actions applied to any two
mass points of the discrete system by the imaginary massless spring connecting the
masses. Thus, in accordance with the analysis of par. 3.2, the work W t of the internal
force matrix tF equals minus the sum of the strain energies of the imaginary massless
springs of the discrete system. This latter sum can be analysed and given [27 p.153-155
eqs.(4.28),(4.38)] the matrix form 1
2
T t t U K U , which justifies equation (3.2).
Surprisingly, the conservative interaction law (3.1) as applied to a discrete system is
classically taken for equivalent to the generalized Hooke’s law (2.9) of continuum elas-
ticity [20 pp.271-273]. Actually, this is incorrect, because the conservative internal
forces described by the conservative interaction law (3.1) cannot comply with the non-
conservative internal stresses developed in an elastic continuum under dynamic loading
[par. 2.6 and 2.7, Ch. 2]. Besides, the conservative interaction law (3.1) cannot in gen-
eral apply to an elastic discrete system (i.e. a discrete system with no deformation after
unloading). Indeed, by Newton’s second law and the conservative interaction law (3.1),
the vibration of the discrete system can be described by the matrix equation
t t t M U + K U P , (3.3)
where tP and M stand for the column matrix of the external forces applied to the
discrete mass points of the system and the square matrix of the masses of the discrete
mass points of the system, respectively.
Evidently, after unloading at 0t U or 0t U , equation (3.3) for 0t P will turn
to the equation of a free undamped vibration, which means that the system retains de-
formation after unloading, and hence, cannot be classified as an elastic (i.e. with no de-
formation after unloading) system. This outcome verifies that an elastic discrete system
cannot develop conservative internal forces, which means that it must develop noncon-
servative internal forces, except for the case of static deformation, i.e. for 0t U ,
which excludes any vibration. Thus, the conservative interaction law (3.1) as applied to
a discrete system cannot represent elasticity except for the case of static deformation.

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
74
3.4. ELASTIC DISCRETE SYSTEMS WITH VISCOUS DAMPING
Let us now consider a discrete system with nonconservative internal forces, and let the
column matrix tF of these internal forces be related to the displacement matrix tU
of the system by means of the viscoelastic law
t t t F K U C U , (3.4)
where C stands for a square matrix of viscous-damping coefficients and the column
matrix tC U represents nonconservative forces in a viscous-damping form.
By Newton’s second law and the viscoelastic law (3.4), the vibration of the discrete sys-
tem can be described in the matrix form
t t t t M U + C U + K U P . (3.5)
It is quite obvious that after unloading at 0t U or 0t U , equation (3.5) for 0t P
will turn to the description of a free damped vibration, which, for appropriate C , im-
plies that the deformation of the system will die out after unloading. And hence, it must
be classified as an elastic (i.e. with no deformation after unloading) system. This out-
come indicates that the viscoelastic law (3.4) for nonconservative internal forces actu-
ally represents an elastic discrete system, notwithstanding conventional wisdom.
3.5. DISCRETE EQUIVALENT OF THE GENERALIZED HOOKE’S LAW
Summarizing, the conservative interaction law (3.1) for a discrete system cannot com-
ply with the continuum formulation (2.9) of Hooke’s law because the latter defines non-
conservative internal stresses in an elastic continuum. As shown in the foregoing analy-
sis, the internal stresses of an elastic continuum obeying the continuum formulation
(2.9) of Hooke’s law give rise to nonconservative internal body forces formed by the
stress derivatives xx yx zxσ x , τ y , τ z , . These nonconservative internal body
forces are what the conservative interaction law (3.1) ignores and cannot comply with.
It is quite clear that the discrete equivalent of the continuum formulation (2.9) of

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
75
Hooke’s law must represent the total action of the internal stresses in an elastic body.
And hence, it must take into account the nonconservative internal body forces formed
by the internal stresses developed in the body. This may be carried out by modifying
the conservative interaction law (3.1) so that it will also include damping terms. Such a
modification for defining the discrete equivalent of the continuum formulation (2.9) of
Hooke’s law is suggested by the viscoelastic law (3.4),
t t t F K U C U . (3.4)
It is worth noting that in the above discrete equivalent of the continuum formulation
(2.9) of Hooke’s law, the conservative component t K U does not represent the total
of the conservative balanced components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ of the internal stresses,
while the viscous-damping component t C U does not represent only the
nonconservative internal body forces xx xy xzσ x , τ y , τ z , , which express but
the action of the unbalanced components of the internal stresses [cf Ch. 1, par. 1.4.3].
Indeed, as shown in par. 3.2 and 3.3, the internal force matrix tF in the discrete
equivalent of the continuum related to the application of the continuum formulation
(2.9) of Hooke’s law does work from 0U up to a nonzero magnitude U that equals
minus the strain energy of the equivalent discrete system [38 p.92 eq.(8.12)], and hence,
constitutes a single-valued function of only the displacement matrix tU . Thus, a part
of the viscous-damping component t C U of the internal force matrix tF must
contribute to the strain energy of the continuum, so that it makes the strain energy of the
continuum be not a single-valued function of the displacement matrix tU , but instead,
a single-valued function of the continuous displacement distribution all over the contin-
uum. Only the rest part of the viscous-damping component t C U can represent the
nonconservative internal body forces xx xy xzσ x , τ y , τ z , of an elastic contin-
uum, thereby exclusively contributing to the kinetic energy of the elastic continuum.
In these different contributions consists the difference between the internal forces de-
veloped in the discrete equivalent of an elastic continuum and the internal stresses de-
veloped in the elastic continuum.

Chapter 3: Nonconservative Nature of Internal Forces in the Elastic Discrete System Dynamics
76
3.6. CONCLUDING REMARKS
In this chapter the following main conclusions can be deduced:
A conservative discrete system cannot be elastic, because after unloading it undergoes
an undamped vibration, thereby retaining permanent strains. Thus, the nonconservative
internal stresses developed in an elastic continuum obeying the generalized Hooke’s law
and subjected to dynamic loading cannot comply with the conservative interaction law
as applied to a discrete system. Instead, they can comply with the viscoelastic model of
nonconservative internal forces in a discrete system, which means that this model may
be considered as a discrete equivalent of the continuum formulation of Hooke’s law (i.e.
the generalized Hooke’s law as applied to a continuum). In other words, the discrete
equivalent of the continuum formulation of the generalized Hooke’s law must include a
damping term, and such an equivalent is the viscoelastic model of the nonconservative
internal forces of a discrete system.
A conservative discrete system can be elastic only on the approximation of static (i.e.
motionless) deformation.

77
CHAPTER 4
DAMPING IN THE WAVE EQUATION OF CONTINUA
RULED BY LINEAR STRESS-STRAIN RELATIONS
4.1. GENERAL
Chapter 2 has proved that the internal stresses in a vibrating continuum, whether elastic
or not, are nonconservative, thereby including damping components, despite classical
analysis. So, there is a need for elucidating the error in classical analysis that led to
conservative internal stresses and undamped response of a vibrating continuum.
Chapter 4 aims to mathematically elucidate damping as an effect consistent with a free
vibrating taut string ruled by a linear stress-strain relation. To this goal, the continuum
model of a taut string with fixed ends and subjected to an initial displacement condition
is put under examination. The partial differential equation of motion of the taut string is
called the one-dimensional wave equation [44 p.438], and is representative not only of
the taut string but also of a free vibrating elastic continuum ruled by the generalized
Hooke’s law [35 pp.408,409 eqs.(9.15),(9.25)].
In the classical view, the transverse internal stresses developed in the taut string are
classified as conservative stresses, and hence, they can only allow an undamped free vi-
bration of the taut string or the elastic continuum. The original approach to this view
applies the modal analysis introduced by Bernoulli in 1753 [1 pp.502-522], i.e. the later
known as Fourier series analysis with respect to a family of orthogonal functions, and
by separating variables uncouples the one-dimensional wave equation into an infinite
number of ordinary differential equations, with each one describing an undamped free
vibration of a generalized single-degree-of-freedom system. Each one of the corre-
sponding undamped generalized displacements is multiplied by a function of the posi-
tion variable (mode), and all products are superimposed to form the free vibration re-
sponse of the taut string or the elastic continuum.

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
78
In this chapter, it is firstly shown that the modal analysis will lead to uncoupling the
one-dimensional wave equation into an infinite number of undamped free vibrations of
single-degree-of-freedom systems only by means of two arbitrary assumptions:
1) differentiation of the integral representation of a Fourier coefficient (i.e. a general-
ized displacement) can be carried out by differentiating its integrand, and
2) differentiation of a Fourier series can be carried out by differentiating its terms.
But, the general solution to the wave equation as superposition of an infinite number of
undamped free vibrations of single-degree-of-freedom systems may not be undamped.
Indeed, each one of the undamped free vibrations can include an infinitesimal damping
factor, and hence, their superposition can include a product of infinity by an infinitesi-
mal damping factor. This product, as an indeterminate form, may be nonzero, which
indicates damping. Thus, uncoupling the wave equation into ordinary differential equa-
tions of undamped free vibrations cannot suffice for an undamped general solution.
On the other hand, acceleration discontinuities with respect to time at a finite number of
any instants in time prove to be admissible to the general solution of the wave equation.
But, this disputes the above two arbitrary assumptions, whose validity could only be
sufficed by the time continuity of the accelerations.
Then, it is shown that the deformation motion is a source of damping for any continu-
um, whether elastic or not, which necessitates a damped general solution to the wave
equation. Only a motionless deformation can be undamped.
Last, a damped general solution to the one-dimensional wave equation is derived by
means of Fourier series after removing the above two arbitrary assumptions.
All in all, Chapter 4 merely highlights the fact that any classical approach to the un-
damped general solution of the wave equation adopts such arbitrary assumptions that
mathematically lead to the conclusion of the undamped general solution, which is but a
tautology (circulating argument). Actually, the classical view of the undamped solution
requires that the internal stresses in the free vibrating continuum be conservative, which
means that the total work of the internal stresses all over the continuum must be a sin-
gle-valued function of only the strains, and hence, the displacements, all over the con-
tinuum [38 pp.90,92-93]. However, only the strain energy, as the part of the total work
of internal stresses that exclusively results from the action of the balanced stress com-
ponents at every point of the continuum, is a single-valued function of only the strains
[80]. In fact, there is another part of the total work of elastic stresses that exclusively
results from the action of the unbalanced stress components at every point of the con-

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
79
tinuum and equals the total work of the stress derivatives xx yx zxσ x , τ y , τ z , ,
all over the continuum. This particular work only relates to the deformation motion of
the continuum, according to the partial differential equations of motion for a point of the
continuum [2 p.85 eq.(15)], i.e.
2yxxx zx x
2
2xy yy zy y
2
2yzxz zz z
2
τσ τ uρ
x y z t
τ σ τ uρ
x y z t
ττ σ uρ
x y z t
(4.1)
where xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ stand for the balanced stress components at a point of the
continuum, while the stress derivatives xx yx zxσ x , τ y , τ z , represent internal
body forces resulting from the unbalanced stress components,
x y zu ,u ,u stand for the displacements at a point of the continuum, along the
x, y, z coordinate axes, respectively,
ρ stands for the mass density at a point of the continuum.
Besides, the total work of the stress derivatives xx yx zxσ x , τ y , τ z , all over
the continuum proves not to be a single-valued function of only the strains, and hence,
the displacements, which implies that the internal stresses must be nonconservative.
This chapter explains why classical theory failed to realize this conclusion and verifies
our research suggesting that the internal stresses in any free vibrating continuum,
whether elastic or not, be actually nonconservative [80], which necessitates that the
general solution to the one-dimensional wave equation be damped.
4.2. THE SOLUTION TO THE WAVE EQUATION AS A FOURIER SERIES
In 1753, Daniel Bernoulli established a powerful series transformation of functions [1
pp.502-522], nowadays referred to as a Fourier series with respect to the system of or-
thogonal functions [44 pp.74-75], [112 p.489], by expressing the displacement u x,t of

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
80
a taut string at level x and time t as an infinite series in terms of the natural modes
n x sin n L x viz.
0 1
n n n
n n
u x,t q t x q t sin n L x
, (4.2a)
-1
2
0 0 0
2d d d
L L L
n n nq t x x u x,t x x u x,t sin n L x xL
, (4.2b)
where nq t stands for a Fourier coefficient representing generalized displacement,
and L stands for the length of the taut string, whose ends 0x and x L are fixed.
The natural modes n x sin n L x are derived from the eigenvalue equation [35
pp.418-419]
2
0, withn n n nx c x c cons tant (4.3)
and the homogeneous boundary conditions
0 0n n L , (4.4)
which comply with the homogeneous boundary conditions of the taut string
0 0u ,t u L,t . (4.5)
By transformation (4.2), Bernoulli introduced the modal analysis, i.e. the method of
separation of variables [44 pp.467-470] for evaluating the general solution to the one-
dimensional wave equation of a free vibrating taut string, i.e.
2 22
2 2
u x,t u x,tc
t x
, (4.6)
which had been first formulated by d'Alembert some six years before [1 pp.502-522].
The one-dimensional wave equation (4.6) is actually representative of the free vibration
of a line continuum ruled by a linear stress-strain relation, thereby being representative

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
81
of the classical elasticity founded on the generalized Hooke’s law.
For the case of the taut string, the constant c takes on the value [35 pp.406-407]
c T m , (4.7)
which d’Alembert found equal to the propagation velocity of the waves along the string.
The assumed linear stress-strain relation can be put in the form [35 p.407 eq.(9.6)]
u x,t
V x,t Tx
, (4.8)
where T , m and V x,t denote a constant tension force or tension uniform stress that
keeps the string taut, the mass per unit length of the taut string, and the transverse force
or transverse uniform stress of the cross-section at level x , respectively,
u x,t x denotes the strain of the string.
4.3. CLASSICAL UNCOUPLING OF THE WAVE EQUATION
According to the classical methodology introduced by Bernoulli, the wave equation
(4.6) can be uncoupled into ordinary differential equations each one of which represents
an undamped vibration in the generalized displacement nq t of a single-degree-of-
freedom system. This undamped result, however, can only stand on two arbitrary clas-
sical assumptions [79] whose realization is not assured. In fact, a sufficient condition
for these assumptions is the continuity of acceleration, which, however, contradicts the
general solution to the wave equation. The classical uncoupling into undamped vibra-
tions can be obtained by following either of the existing two alternative approaches:
4.3.1. Integration approach to classical uncoupling
We can multiply the wave equation (4.6) by sin n L x for 1,2,3,n= , integrate
(which justifies the name integration approach) the product all over the length L of the

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
82
taut string and get
2 22
2 20 0
d d
L Lu x,t u x,t
sin nπ L x x c sin nπ L x xt x
. (4.9)
The right-hand integral of the above equation after integrating by parts becomes
2
20
d
Lu x,t
sin nπ L x xx
0
d
Lu x,t u x,t
sin nπ L x nπ L cos nπ L x xx x x
0
Lu x,t
sin nπ L x u x,t nπ L cos nπ L xx
2
0
d
L
nπ L u x,t sin nπ L x x . (4.20)
Owing to the homogeneous boundary conditions (4.3), the inside brackets quantity in
the last right-hand member of equation (4.20) becomes zero, and thus, by inserting the
Fourier transform (4.2b), equation (4.20) may be rewritten as
22
20
d2
L
n
u x,t Lsin nπ L x x nπ L q t
x
. (4.21)
It is classically assumed that the really valid rule for differentiating the Fourier trans-
form (4.2b) to the second order, that is,
2 2
2 2
0
d 2d
d
Lnq t
u x,t sin n L x xLt t
, (4.22)
can equally be expressed by interchanging the differentiation and integration signs,
thereby differentiating the integrand of the integral instead of the integral itself (this is
hereafter called assumption of integrandwise differentiability), viz.

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
83
2 2
2 20
d 2d
d
Lnq t u x,t
sin n L x xLt t
. (4.23)
Actually, only the continuity of the acceleration 2 2u x,t t for all values of x and t ,
which, however, is not given, can assure the above assumption [44 p.348], [112 p.286,
Leibnitz’s rule]. Moreover, the continuity of the acceleration 2 2u x,t t necessitates
the continuity of the derivative nq t [112 p.263, theorem].
Now, combining the integrandwise differentiability assumption (4.23) with equations
(4.9) and (4.21), classical analysis can obtain Bernoulli’s ordinary differential equations
[27 p.212]
22
2
d0 for 1, 2,3,
d
nn n
q tq t n=
t , (4.24)
where n represents a natural angular frequency of the free vibrating taut string, or
elastic continuum ruled by the wave equation (4.6), which is given by the formula
n n c L . (4.25)
Each one of the ordinary differential equations (4.24) describes an undamped free vibra-
tion of a single-degree-of-freedom system in a generalized displacement nq t , with the
system internal force being equal to 2n nq t , and becomes equivalent to the wave
equation (4.6) only on the assumption of integrandwise differentiability (4.23). This as-
sumed equivalence is classically taken for indicating the undamped character of the so-
lution of the wave equation (4.6) as a superposition of the undamped solutions of the
ordinary differential equations (4.24).
4.3.2. Differentiation approach to classical uncoupling
In the classical view, if we differentiate (which justifies the name differentiation ap-
proach) the terms of the Fourier series (4.2a) twice with reference to either t or x , the
resulting series represent the derivative 2 2u x,t t or 2 2u x,t x , respectively.

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
84
Then, substituting these series representations for the corresponding derivatives in the
wave equation (4.6), we can obtain an infinite series, which, by virtue of the
orthogonality of the natural modes n x sin n L x can be uncoupled into Ber-
noulli’s ordinary differential equations (4.24).
According to this classical view, the really valid rule for differentiating the Fourier se-
ries (4.2a) to the second order, that is,
2 2
2 20
n
n
u x,tq t sin nπ L x
t t
, (4.26a)
2 2
2 20
n
n
u x,tq t sin nπ L x
x x
, (4.26b)
can equally be expressed by interchanging the differentiation and summation signs,
thereby substituting the sum of the derivatives of the terms of the series for the deriva-
tive of the series (this is hereafter called termwise differentiability assumption), viz.
2 2
2 21
d
d
n
n
u x,t q tsin nπ L x
t t
, (4.27a)
2 2
2 21
d
dn
n
u x,tq t sin nπ L x
x x
. (4.27b)
Actually, only the uniform convergence of the infinite series in equations (4.27), which,
however, is not given, can suffice for the above assumption [44 p.29, theorem IV].
Moreover, the uniform convergence of the infinite series in equation (4.27b) and the ap-
parent continuity of the functions nq t and 2 2d 1 2 dsin n πx L x entail the conti-
nuity of the derivative 2 2u x,t x with respect to x and t [44 p.29, theorem II].
Now, applying the termwise differentiability asumption (4.27) to the wave equation
(4.6), multiplying the resulting equation by sin ν L x for 1,2,3,ν , integrating
the product all over the length L of the string, taking into account that the second-order
derivative of the natural modes n x sin n L x combined with equation (4.7) al-
lows the substitution

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
85
2
2
2
d
dnsin n L x c sin n L x
x , (4.28)
and using the orthogonality property of the natural modes n x sin n L x , i.e.
0
0 for
d,for
2
L n ν
sin n π L x sin ν π L x x Ln ν
(4.29)
classical analysis can derive Bernoulli’s ordinary differential equations (4.24) directly
from the wave equation (4.6) on the assumption of termwise differentiability (4.27).
Thus, assuming the termwise differentiability (4.27), all conclusions derived from the
integration approach can also be derived from the differentiation approach.
4.4. THE CLASSICAL UNDAMPED SOLUTION TO THE WAVE EQUATION
As exposed above, only on the integrandwise and termwise differentiability assump-
tions (4.23) and (4.27), the wave equation (4.6) can be uncoupled into the undamped vi-
brations (4.24). Hence, the solution of the wave equation by the Fourier series (4.2a)
becomes a superposition of undamped solutions, which is conventionally considered to
be undamped too. Actually, this consideration is incorrect; for the superposition of an
infinite number of infinitesimal damping components included in the undamped vibra-
tions (4.23) may take on a nonzero finite value, which means that even the arbitrary dif-
ferentiability assumptions (4.23) and (4.27) cannot assure that the general solution to
the wave equation (4.6) is undamped. Let us evaluate the undamped general solution.
The general solution to each one of Bernoulli’s ordinary differential equation (4.24)
may be written as [27 p.21 eq.(1.42)]
d 0 d
0n
n n n nn
q tq t sin t q cos t
. (4.30)
Adopting the following initial conditions for the wave equation (4.6)
0 and 0 0u x, f x u x, t , (4.31)

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
86
and substituting in the Fourier transform (4.2b) and the first-order derivative of the Fou-
rier transform (4.2b), we can arrive at the following initial conditions for nq t
0 0
2 20 0 d d
L L
nq u x, sin n L x x f x sin n L x xL L
, (4.32a)
0
d 0 02d 0
d
Lnq u x,
sin n L x xt L t
. (4.32b)
It is noticed that the existence of the second-order derivative 2 2u x,t t assures the
continuity of the first-order derivative u x,t t required by Leibnitz’s rule [44 p.348],
[112 p.286] for the validity of equation (4.32b).
In view of the initial conditions (4.31) and after making use of equation (4.25), the gen-
eral solution (4.30) becomes
0
20 d
Ln
n n n nq t q cos t f x sin x x cos tL c
, (4.33)
which inserted in the Fourier series (4.2a) leads to the classical general solution
1 0
2d
Ln n
n
n
u x,t f x sin x x cos t sin xL c c
. (4.34)
This superposition solution is conventionally taken for undamped, although it includes
the sum of an infinite number of zero damping components, each one of which is in-
cluded in one of the superposed solutions. The sum, as the product of infinity by zero,
is indeterminate and may be nonzero, which indicates damping in the continuum.
It is worth noting that despite the above flaw the classical undamped solution (4.34) has
been considered as yet the correct general solution to the wave equation (4.6).
4.5. THE CONTROVERSY OVER BERNOULLI’S TRANSFORMATION
As is well known [1 pp.502-522], by applying his transformation (4.2) to an arbitrary

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
87
initial displacement curve 0u x, f x , Bernoulli derived a long before Fourier at the
trigonometric series representation of an arbitrary function f x
1
n
n
f x a sin n L x
, (4.35a)
0
20 d
L
n na q f x sin n L x xL
, (4.35b)
and here comes the major point of the controversy following. Bernoulli's transforma-
tion (4.2) was severely criticized by Euler, who had already worked on the same sub-
ject. Euler objected to Bernoulli’s transformation (4.2), ordinary differential equations
(4.24) and wave solution (4.6) by objecting to the possibility of an arbitrary function
f x to be expressed as the trigonometric series (4.35). In Euler’s opinion, due to the
impossibility of representing an arbitrary function by a trigonometric series, Bernoulli’s
transformation (4.2) could not be of general validity, and hence, Bernoulli’s solution
(4.6) could not be the general solution of the wave equation (4.6). In this debate,
d'Alembert actively took Euler’s part, supporting that neither his own wave solution
1 2u x,t u x c t u x c t (4.36)
could in general be represented by a trigonometric series [1 pp.502-522].
Bernoulli did not retreat from his position, insisting that his trigonometric series (4.6)
and (4.35) corresponded to the most general solution. The argument between Euler,
d’Alembert and Bernoulli continued for a long time with no agreement reached [1
pp.502-522]. However, the essence of the problem with Bernoulli’s method is neither
the transformation (4.2) nor the extent of the class of the functions f x that can be
represented by the infinite trigonometric series (4.35), but the underlying arbitrary as-
sumptions of integrandwise differentiability (4.23) and termwise differentiability (4.27),
for which a sufficient condition is the continuity of acceleration. As a matter of fact, it
is the adoption of these arbitrary assumptions that excludes damping from the classical
solution to the wave equation (4.6).
The controversy played an extremely important role in clarifying the very notion of a
function and in representing functions by trigonometric series. Specifically speaking, it
was the stimulus for Fourier to develop his harmonic analysis of periodic functions, and

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
88
conclude the well-known Fourier series. This analysis expands and can be applied to
any function that does not possess an infinite number of discontinuities. So, Bernoulli’s
insistence on his transformation (4.2) and his trigonometric series (4.35) has been given
full mathematical evidence.
On the ground of the harmonic analysis, as formulated by Fourier and completed by
Dirichlet [85 pp.1-18], Bernoulli’s method overwhelmed the criticism of Euler and
d'Alembert and appeared to be justified by the facts. This post success of Bernoulli in
the controversy has dominated the evolution of the dynamics of elastic continuous sys-
tems. The undamped solution obtained by Bernoulli's approach to the elastodynamics
of a continuum is taken for exact [27 pp.204-242]. As a consequence, damping is taken
for inconsistent with the elastic continuous systems, within the frame of the classical
laws. Exactly this consideration has been the focal point of my critique initiated in a pe-
ripheral way by a paper of 1996 [78] and continued by two papers in 2008-2009 [79],
[80]. This chapter advances my critique and aims at a real insight into the topic.
4.6. EQUIVALENCE BETWEEN THE INTEGRANDWISE AND TERMWISE
DIFFERENTIABILITY ASSUMPTIONS
With the goal to prove the equivalence between the integrandwise and termwise differ-
entiability assumptions (4.23) and (4.27), we can multiply Bernoulli’s ordinary differen-
tial equation (4.24) by sin n L x , combine the product with equations (4.25) and
(4.28) and get
2 22
2 2
d d
d d
nn
q tsin n L x c q t sin n L x
t x . (4.37)
Summing up all equations (4.37) for 1,2,3,n entails
2 22
2 21 1
d d
d d
nn
n n
q tsin n L x c q t sin n L x
t x
, (4.38)
which as a superposition of Bernoulli’s ordinary differential equations (4.24) must be
equivalent to the wave equation (4.6), on the assumption of integrandwise differentiabil-

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
89
ity (4.23) or termwise differentiability (4.27). This equivalence entails the equivalence
between integrandwise differentiability (4.23) and termwise differentiability (4.27).
Indeed, by analogy with the expression of the function u x,t as the Fourier series (4.2),
the derivative 2 2u x,t t can be expressed by the Fourier series
2
21
n
n
u x,tg t sin n L x
t
, (4.39a)
2
20
2d
L
n
u x,tg t sin n L x x
L t
, (4.39b)
with ng t standing for a new Fourier coefficient representing a generalized accelera-
tion. Further, on account of the assumption of integrandwise differentiability assump-
tion (4.23), the Fourier transform (4.39b) yields
2
2
d
d
nn
q tg t
t , (4.40)
and substituting in the Fourier transform (4.39a) gives the termwise differentiation rule
(4.27a), which combined with equation (4.38) and the wave equation (4.6) results in the
termwise differentiation rule (4.27b). And inversely, the termwise differentiability as-
sumption (4.27a) by means of the Fourier series (4.39) assures equality (4.40), and
hence, it proves to be equal to the integrandwise differentiability assumption (4.23).
In conclusion, the assumptions of integrandwise differentiability (4.23) and termwise
differentiability (4.27) must be equivalent to each other. This equivalence implies that
the continuity of the acceleration 2 2u x,t t with respect to time t and position x is
a sufficient condition not only for the integrandwise differentiability (4.23), but also for
the termwise differentiability (4.27). Similarly, the uniform convergence of the infinite
series in equations (4.27) is a sufficient condition not only for the termwise differenti-
ability (4.27), but also for the integrandwise differentiability (4.23).

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
90
4.7. DAMPING EFFECT OF DEFORMATION MOTION
In this paragraph it is shown that the deformation motion of a continuum ruled by a lin-
ear stress-strain relation is responsible for the nonconservative nature of the internal
body forces represented by the stress derivatives xx yx zxσ x , τ y , τ z , , thereby
being a source of damping in the continuum, notwithstanding conventional wisdom.
Recalling the classical definition of strains as first-order spatial derivatives of the dis-
placements in a continuum and assuming a linear stress-strain relation, it is deduced that
the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ at any point of the continuum, and hence, the strain en-
ergy of the continuum, can be derived as a single-valued function of only the displace-
ments x y zu ,u ,u all over the continuum, irrespective of the deformation motion.
On the contrary, a displacement distribution x y zu ,u ,u all over a dynamically deformed
continuum can actually be related to many different velocity distributions x y zu ,u ,u , and
hence, to many different values of kinetic energy of the continuum. Thus, by means of
the equality between the kinetic energy and the total work of the accelerating forces
x y zρ u , ρ u , ρ u along the displacements x y zu ,u ,u all over the continuum, it is de-
duced that no single-valued relation can exist between the displacements x y zu ,u ,u all
over the continuum and the total work of the accelerating forces x y zρ u , ρ u , ρ u .
Furthermore, as a consequence of the partial differential equations (4.1) for the motion
of an arbitrary point of the continuum, the total work of the accelerating forces
x y zρ u , ρ u , ρ u along the displacements x y zu ,u ,u of all the continuum must be equal
to the corresponding total work of the stress derivatives xx yx zxσ x , τ y , τ z , .
This equality leads to the conclusion that there cannot be defined any single-valued re-
lation between the total work of the stress derivatives xx yx zxσ x , τ y , τ z , of
the elastic continuum and the displacements u x,t all over the continuum.
In view of the definition of conservative and nonconservative stress components given
in par. 4.1 and par. 2.4 of Ch. 2, the above conclusion means that the stress derivatives
xx yx zxσ x , τ y , τ z , , which result from the unbalanced stress components
d d dxx yx zxσ x x, τ y y, τ z z, and act as internal body forces in the contin-
uum, must be classified as nonconservative internal body forces. And taking into ac-
count that the total work of the stress derivatives xx yx zxσ x , τ y , τ z , all over
the continuum by definition coincides with the total work of the unbalanced stress com-

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
91
ponents d d dxx yx zxσ x x, τ y y, τ z z, all over the continuum, it is deduced
that the unbalanced stress components of the continuum must be classified as
nonconservative stress components. This finding proves the damping effect of the in-
ternal stresses in a free vibrating continuum ruled by a linear stress-strain relation.
On the other hand, the total work of the balanced stress components all over a continu-
um, which equals the strain energy of the continuum, by a linear stress-strain relation
becomes a single-valued function of only the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ , and hence,
the displacements x y zu ,u ,u , all over the continuum. Thus, the total work of the bal-
anced stress components all over the continuum must be a single-valued function of on-
ly the displacements x y zu ,u ,u all over the continuum. This single-valuedness, in view
of the definition of conservative and nonconservative stresses given in par. 4.1, implies
that the balanced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ that linearly relate to strains,
i.e. x,t E x,t , and developed across the boundary surface of every infinitesimal
element in the given continuum must be classified as conservative stress components.
Consequently, in a continuum ruled by a linear stress-strain relation, the internal
stresses developed at every infinitesimal element as the resultants of both the unbal-
anced stress components d d dxx yx zxσ x x, τ y y, τ z z, and the balanced
stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ must be classified as nonconservative stresses.
On this basis therefore, the deformation motion related to the free vibration of a contin-
uum ruled by a linear stress-strain relation can prove and fully justify the existence of
damping within the continuum, and hence, the damped character of the general solution
to the one-dimensional wave equation (4.6).
4.8. DAMPING EFFECT OF REMOVING THE CLASSICAL LIMITATION
Owing to the damping effect of the deformation motion of a continuum, the classical as-
sumptions of integrandwise differentiability (4.23) and termwise differentiability (4.27)
cannot result in an undamped general solution to the wave equation (4.6).
On the other hand, acceleration discontinuities with respect to time at a finite number of
any instants in time prove to be admissible to the general solution of the wave equation
(4.6), which disputes the sufficient condition of continuous accelerations for the validity
of the integrandwise and termwise differentiability assumptions (4.23) and (4.27),

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
92
thereby disputing the undamped uncoupling of the wave equation (4.6).
Besides, even for an undamped uncoupling, the sum of the infinite number of the un-
coupled undamped solutions may not be undamped, since the product of infinity by the
zero damping of each uncoupled undamped solution may give nonzero damping.
So, there is no reason for the integrandwise and termwise differentiability assumptions.
4.8.1. Admissibility of acceleration discontinuities
It is always possible to abruptly apply to the taut string or the elastic continuum (or any
other structure) an infinitesimal additional velocity distribution u x,t t at a finite
number of any instants in time, without, however, affecting the displacement response
u x,t of the taut string or any other body for any finite period of time t . After all, an
infinitesimal velocity distribution acting for a finite period of time t can only yield an
infinitesimal displacement distribution, thereby leaving unaffected the general solution
of the wave equation (or any other equation of motion). Therefore, the possibility of
applying infinitesimal additional velocity distributions at a finite number of any instants
in time must be admissible to the general solution. And since this possibility equals the
possibility of applying additional finite acceleration distributions 2 2u x,t t of infini-
tesimal duration at a finite number of any instants in time, which constitute finite dis-
continuities of the acceleration distribution 2 2u x,t t with respect to time, it is de-
duced that such acceleration discontinuities must be admissible to the general solution.
4.8.2. Damping effect of removing the integrandwise differentiability assumption
We firstly examine the effect of replacing the arbitrary integrandwise differentiability
assumption (4.23) with the undisputable general differentiation rule (4.22) defining the
actual magnitude 2 2d dnq t t ,
2 2
2 20
d 2d
d
Lnq t
u x,t sin n L x xLt t
. (4.22)

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
93
This rule is derived from the Fourier transform (4.2b) and can equally be written as
2 22
2 20
d 2d
d
Ln
n n
q t u x,tsin n L x x y t
Lt t
, (4.41)
where 2n ny t stands for a generalized acceleration representing the difference be-
tween the actual magnitude and the classically assumed equivalent of 2d d 2nq t t , as
given by equations (4.22) and (4.23), respectively. Since 2n is an angular frequency, it
follows that ny t must denote a generalized displacement.
By virtue of equations (4.22) and (4.41), the generalized displacement ny t can ana-
lytically be expressed in terms of the response u x,t and the natural mode
n z sin n L x as below
2 2
2 2 20 0
2d d
L L
n
n
u x,ty t sin n L x x u x,t sin n L x x
L t t
. (4.42)
In view of equations (4.41) or (4.42), the generalized displacement ny t can only be
zero on the assumption of the integrandwise differentiability (4.23), that is,
0ny t integrandwise differentiability assumption (4.11) . (4.43a)
Combining the undisputable general differentiation rule (4.22) with equations (4.9) and
(4.21) yields the ordinary differential equations
22
2
d0 for 1, 2,3,
d
nn n n
q tq t y t n=
t (4.44)
The ordinary differential equations (4.44) represent the general form of the ordinary dif-
ferential equations in the generalized displacements nq t that can be derived from un-
coupling the wave equation (4.6). Since the ordinary differential equations (4.44) are
equivalent to the wave equation (4.6), the possibility of the former to represent damped

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
94
vibrations will indicate the damped character of the general solution to the wave equa-
tion (4.6). So, let us examine whether the ordinary differential equations (4.44) repre-
sent undamped or damped vibrations.
Evidently, each ordinary differential equation (4.44) describes a free vibration of a sin-
gle-degree-of-freedom system in a generalized displacement nq t , with the system in-
ternal force 2n n nq t y t having magnitude dependent not only on the displace-
ment nq t of its application point but also on the displacement ny t , which, by equa-
tion (4.22) and by the left-hand integral of the right-hand member of equation (4.42), is
not a single-valued function of only nq t . This latter implies that the work of the sys-
tem internal force 2n n nq t y t along the generalized displacement nq t is not a
single-valued function of only the generalized displacement nq t , thereby implying
that the system internal force 2n n nq t y t is nonconservative [38 p.90], [111
pp.3-4]. And since 2n nq t is its conservative component, it follows that 2
n ny t is
its nonconservative component. This implication makes each ordinary differential
equation (4.44) in general represent a damped vibration of the corresponding single-
degree-of-freedom system.
On this base therefore, the one-dimensional wave equation (4.6) must in general repre-
sent a damped free vibration of a taut string or an elastic continuum.
Only assuming the integrandwise differentiability (4.23), which implies 0ny t , the
internal force 2n n nq t y t becomes 2
n nq t , thereby becoming exclusively
dependent on the displacement nq t , and hence, conservative. Accordingly, the ordi-
nary differential equations (4.44) are reduced to Bernoulli’s ordinary differential equa-
tions (4.24), thereby representing undamped vibrations, which means that only on the
condition of the integrandwise differentiability (4.23) the free vibration of the contin-
uum can be uncoupled into undamped vibrations of single-degree-of-freedom systems.
4.8.3. Damping effect of removing the termwise differentiability assumption
We now examine the effect of replacing the arbitrary termwise differentiability assump-
tion (4.27) with the undisputable general differentiation rules that consist in expressing

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
95
the partial derivatives 2 2u x,t t and 2 2u x,t x as the Fourier series
2
121
n
n
u x,tt sin n L x
t , (4.45a)
2
221
n
n
u x,tt sin n L x
x
, (4.45b)
where 1n t and 2n t stand for the coefficients of the Fourier series of the deriva-
tives 2 2u x,t t and 2 2u x,t x with respect to the orthogonal function
sin n L x . As for the nature of their magnitudes, the Fourier coefficients 1n t
and 2n t represent a generalized acceleration and a generalized curvature, respective-
ly, and by analogy with the Fourier transform (4.2b) prove to be equal to
2
1 20
2d
L
n
u x,tt sin n L x x
L t , (4.46a)
2
2 20
2d
L
n
u x,tt sin n L x x
L x . (4.46b)
By using the Fourier series (4.45) instead of the termwise differentiability assumption
(4.27), we actually assume that the Fourier series of the derivatives 2 2u x,t t and
2 2u x,t x merely converge to the derivatives instead of uniformly converging.
The Fourier coefficients 1n t and 2n t can be transformed as follows
2
21 12
d
d
nn n n
q tt y t
t , (4.47a)
2
2 22
nn n nt q t y t
c
, (4.47b)
with d d2 2nq t t denoting the actual magnitude defined by the undisputable equation
(4.22) and 1ny t , 2ny t denoting two new generalized displacements.
By means of transformations (4.47), the Fourier series (4.45) is given the form

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
96
2 22
12 21
d
d
nn n
n
u x,t q ty t sin n L x
t t
, (4.48a)
2 2
22 21
nn n
n
u x,tq t y t sin n L x
x c
. (4.48b)
So, 21n ny t and 2ny t prove to be the differences of the actual coefficients 1n t
and 2n t of the Fourier series (4.45) of the derivatives 2 2u x,t t , 2 2u x,t x
from the actual generalized magnitudes nq t and nq t , respectively. These differ-
ences become zero only by virtue of the termwise differentiability assumption (4.27).
Inserting equations (4.48) in the wave equation (4.6), using equation (4.28), and rear-
ranging terms will give
22
1 221
d0
d
nn n n n
n
q tq t y t y t sin n L x
t
, (4.49)
which after substituting
1 2n n ny t y t y t , (4.50)
becomes
22
21
d0
d
nn n n
n
q tq t y t sin n L x
t
. (4.51)
Multiplying equation (4.51) by sin ν L x , with 1,2,3,…ν , integrating the result-
ing equation all over the length L of the string, interchanging the order of integration
and summation, and taking into account the orthogonality property (4.29), we can fi-
nally conclude that equation (4.51) is equivalent to
22
2
d0 for 1, 2,3,
d
nn n n
q tq t y t n=
t (4.44)
In view of Bernoulli’s ordinary differential equations (4.24) and the analysis of par.

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
97
4.4.2, the generalized displacement ny t can only be zero on the termwise differenti-
ability assumption (4.27), that is,
0ny t termwise differentiability assumption (4.15) . (4.43b)
Thus, all findings derived from replacing the disputable integrandwise differentiation
rule (4.23) with the undisputable general differentiation rule (4.22) can also be derived
from replacing the disputable termwise differentiation rule (4.27) with the undisputable
general differentiation rules (4.45). It is worth noting that owing to equation (4.44), the
magnitude of ny t can be estimated by means of equation (4.42).
4.9. NONCONSERVATIVE ELASTIC INTERNAL BODY FORCES
After removing the termwise differentiability assumption (4.27), and hence, its equiva-
lent integrandwise differentiability assumption (4.22), the work of the internal body
forces V x,t x developed all over a taut string proves not to be a single-valued func-
tion of the displacements u x,t developed all over the string.
Indeed, from the linear transverse force-strain relation (4.8) it follows
2
2
V x,t u x,tT
x x
, (4.52)
which combined with equation (4.48b) yields
1
2n
n 2n2n
V x,tT q t y t sin n L x
x c
. (4.53)
On account of equation (4.53), the total work V xW of the internal body forces
V x,t x along the displacements u x,t all over the taut string becomes equal to
0 0
d d
L t
V x
V x,τ u x,τW τ x
x t

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
98
2
2210 0
d d
L t
nn n
n
u x,τωT q τ y τ sin nπ L x τ x
tc. (4.54)
It is noticed that the Fourier transform (4.2b) and the continuity of the velocity
u x,t t resulting from the existence of the acceleration 2 2u x,t t , in view of the
Leibnitz rule [44 p. 348], [48 p.286], give
0
d 2d
d
Lnq t u x,t
sin n L x xt L t
, (4.55)
which by means of the Fourier transformation (4.2) as applied to the velocity u x,t t
with respect to the orthogonal functions sin nπ L x implies that
1
d
d
n
n
u x,t q tsin nπ L x
t t
. (4.56)
Equation (4.54) after inserting equations (4.7) and (4.56), interchanging summation and
integration signs and and making use of the orthogonality property (4.29), becomes
22
2
1 0 0
dd d
d
L tn
V x n n n
n
q tW m ω sin nπ L x x q τ y τ τ
t
2 2
2
1 0
d2 d
4 d
tn
n n n
n
q tm Lω q τ y τ τ
t
, (4.57)
which by means of the Fourier transforms (4.2b) and (4.55) results in
2
2
1 0
d
L
V x n
n
mW ω u x,t sin nπ L x x
L
2
0 0
d d
t L
n
u x,τL y τ sin nπ L x x τ
t
. (4.58)

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
99
The above result indicates that the total work V xW of the transverse force derivatives
V x,t x all over the taut string is not a single-valued function of only the displace-
ments u x,t all over the string. It also depends on all history of the generalized dis-
placements 2ny t and the velocities u x,t t up to time t , which avoids the trans-
verse force derivatives V x,t x being classified as nonconservative internal body
forces of the string for the case of dynamic deformation. Only on the integranwise or
termwise differentiation assumption (4.43), which implies 2 0ny t , the dependence
on the history of the generalized displacements 2ny t and the velocities u x,t t up
to time t is eliminated, which makes the total work V xW be a single-valued function
of only the displacements u x,t , thereby making the transverse force derivatives
V x,t x be conservative internal body forces.
4.10. INTRODUCTION OF DAMPING RATIOS
The velocity magnitude n ny t can be related to the generalized velocity d dnq t t
as below
d
2d
nn n n
q ty t t
t , (4.59)
where n t denotes a scalar coefficient defined as a function of the time t . This defi-
nition reflects the fact that owing to the continuity of the functions ny t and d dnq t t ,
there must be a single-valued relation between them at each time instant t .
Inserting relation (4.59) into the general ordinary differential equations (4.44) gives
them the general mass-stiffness-damping form
22d d
2 d d 0 for 1, 2,3,dd
n nn n n n n2
q t q tt, q t q t n=
tt . (4.60)
On account of the nonconservative nature of the internal force 2n ny t and in view of

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
100
equation (4.59), the magnitude 2 n n n nt;q q t should represent a nonconservative
force, which discloses that the scalar coefficient d dn nt, q t is but the damping ratio
of the thn mode. Thus, the wave equation (4.6) is in general uncoupled into the general
ordinary differential equations (4.44), which represent damped vibrations, and not into
Bernoulli’s ordinary differential equations (4.24), which represent undamped vibrations.
4.11. COMPUTATION OF THE GENERAL SOLUTION
Inserting the damped general solution of the ordinary differential equation (4.60) in the
Fourier transform (4.2a) gives the really general solution to the initial-boundary value
problem of the free vibrating taut string or a free vibrating continuum obeying a linear
stress-strain relation, which must also be damped in view of the equivalence between
the ordinary differential equations (4.60) and the wave equation (4.6).
Let us assume that the damping ratios n t for = 0,1,2,3,…n approximate constants
for 0,1,2,3,…n nt n (4.61)
that are invariable endogenous characteristics of the taut string or the continuum obey-
ing a linear stress-strain relation, and hence, independent of the applied loading. Then
equation (4.60) becomes
22d d
2 0 for 1, 2,3,dd
n nn n n n2
q t q tt q t n=
tt (4.62)
whose general solution equals [35 p.234 eq.(5.22)]
2 2
2
0 00 1 1
1
n nn n n nt
n n n n n n
n n
q qq t e q cos t sin t
. (4.63)
Substituting the initial conditions 0nq and d 0 dnq t for their values defined by
equations (4.3) yields

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
101
0
2dn n
Lt
nq t e f x sin n L x xL
2 2
21 1
1
nn n n n
n
cos t sin t
(4.64)
which inserting in the Fourier transform (4.2a) and making use of equation (4.25) im-
plies the following damped general solution to the one-dimensional wave equation (4.6)
0 0
2dn n
Ltn
n
u x,t sin z e f x sin n L x xc L
2 2
21 1
1
nn n n n
n
cos t sin t
. (4.65)
4.12. THE LIMITATION OF THE D’ALEMBERT WAVE SOLUTION
According to d’Alembert, the general solution of the classical wave equation (4.6) can
in general be described as the superposition of two waves opposite travelling along the
taut string [44 pp.437-438], viz.
1 2u x,t w x ct w x ct , (4.66)
where 1w x ct represents a twice-differentiable wave propagating with velocity c in
the positive direction of the x axis, while 2w x ct represents a twice-differentiable
wave propagating with velocity c in the negative direction of the x axis.
Then, on account of the fact that the d’Alembert wave solution (4.66) under homogene-
ous boundary conditions can lead the displacement u x,t to the space and time perio-
dicity [44 pp.452-454] characterizing an undamped motion, classical theory concludes
the undamped character of the general solution to the wave equation (4.6).
To examine the mathematical rationale behind d’Alembert’s solution (4.66), we adopt

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
102
the substitutions
andr x ct s x ct , (4.67)
which imply that the response u x,t can be rewritten as
u x,t w r,s . (4.68)
Differentiation by means of the chain rule yields [44 p.438]
u x,t w r,s w r,s w r,s w r,sr s
x r x s x r s
, (4.69a)
u x,t w r,s w r,s w r,s w r,sr sc c
t r t s t r s
, (4.69b)
and differentiating again gives
2 2 2 2 2
2 2 2
u x,t w r,s w r,s w r,s w r,s
r s s rx r s
, (4.70a)
2 2 2 2 22 2 2
2 2 2
u x,t w r,s w r,s w r,s w r,sc c c
r s s rt r s
. (4.70b)
However, the validity of the above chain rule of second-order differentiation can only
be assured by the continuity of the partial derivatives 2 2u x,t t and 2 2u x,t z
with respect to x and t [44 pp.330-331, theorem of p.320], [112 p.135, fundamental
lemma of p.127].
Inserting the above values in the wave equation (4.6) results in the following necessary
condition for the validity of equation (4.68)
2 2
0w r,s w r,s
r s s r
, (4.71)
which in general does not coincide with the prerequisite of d’Alembert’s solution (4.66)
given as below [44 pp.437-438]

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
103
2 2
0w r,s w r,s
r s s r
. (4.72)
As is well known in applied mathematics literature [44 pp.437-438], only the
d’Alembert prerequisite (4.72) can ensure that
1 2w r,s w r w s , (4.73)
which suffices for the d’Alembert wave solution (4.66).
Actually, only on the arbitrary classical assumption that the mixed derivatives of w r,s
are independent of the variable sequence of differentiation [44 p.438, footnote 1], i.e.
2 2w r,s w r,s
r s s r
, (4.74)
the necessary condition (4.71) becomes equal to the d’Alembert solution’s prerequisite
(4.72). This assumption, however, cannot be taken for granted [44 p.317], thereby rais-
ing the problem of determining sufficient conditions for its validity.
We now focus on interpreting the d’Alembert prerequisite (4.72) in terms of the original
response u x,t and the original independent variables x and t . In view of the inverse
of substitutions (4.67), viz.
1 1
and2 2
x s r t s rc
, (4.75)
and using the chain rule of differentiation, we conclude that
1 1
2 2
1 1
2 2
w r,s u x,t u x,t u x,t u x,tx t
r x r t r x c x
w r,s u x,t u x,t u x,t u x,tx t
s x s t s x c x
(4.76)
which, after differentiating again by using the chain rule of differentiation and taking
into account the wave equation (4.6), gives

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
104
2 2 2 21
4 2
w r,s w r,s u x,t u x,t
r s s r x t t xc
. (4.77)
Equation (4.77) confirms that the necessary condition (4.71) is always satisfied, while
the d’Alembert prerequisite (4.72) can be put in the equivalent form
2 2u x,t u x,t
x t t x
. (4.78)
Actually, the d’Alembert prerequisite (4.72) in the equivalent form (4.78) can only be
assured by the continuity of the mixed derivatives 2u x,t x t and 2u x,t t x [44
p.317], [111 p.87]. And recalling the required continuity of the derivatives
2 2u x,t t and 2 2u x,t x for the validity of the chain rule of differentiation, the
d’Alembert wave solution (4.66) is only assured by the continuity of all the second-
order derivatives 2 2u x,t t , 2 2u x,t x , 2u x,t x t and 2u x,t t x .
This continuity, however, is beyond the requirement of the existence of the derivatives
2 2u x,t x and 2 2u x,t t for the formation of the wave equation (4.6), thereby
being an arbitrary limitation to the class of the functions u x,t . On the other hand, a
discontinuous derivative 2 2u x,t t is necessarily admissible to the general solution
of the wave equation, in view of the analysis of par. 4.8.1. This admissibility puts in
doubt the classical view that the d’Alembert solution (4.66) is the general solution to the
one-dimensional wave equation (4.6).
In conclusion, although the d’Alembert wave solution (4.66) can conditionally satisfy
the wave equation (4.6) [44 p.438], it cannot coincide with the general solution of the
wave equation (4.6). Actually, as exposed in par. 4.7 and 4.8, the damping effect of the
deformation motion and the admissibility of acceleration discontinuities to the general
solution of the wave equation (4.6) overturn the undamped character of the general solu-
tion of the wave equation (4.6), thereby overturning the undamped d’Alembert solution
(4.66) as the general solution to the wave equation (4.6).
The fact that the d’Alembert wave solution (4.66) is not the general solution to the one-
dimensional wave equation (4.6) can also be verified by means of the Fourier series
(4.2). Indeed, by the Fourier series (4.2) and the assumption of integrandwise differen-

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
105
tiability and termwise differentiability, as assured by the continuity of the derivative
2 2u x,t t underlying the d’Alembert approach, the general solution u x,t is re-
duced to the undamped non-general solution (4.34), which by equation (4.25) becomes
1 0
2d
Ln
n
n cnu x,t f x sin x x sin x cos t
L c L L
. (4.79)
Since the product 2n cn
sin x cos tL L
equals the sum of the d’Alembert pair of opposite
propagating waves n n
sin x c t sin x c tL L
, the above reduced solution be-
comes equal to the d'Alembert wave solution (4.66) in the form [27 pp.238-239]
1 0
1d
Ln
n
n nu x,t f x sin x x sin x c t sin x c t
L c L L
. (4.80)
On account of the fact that the reduced solution (4.79) proved not to be the general solu-
tion u x,t of the wave equation (4.6), it follows that neither the d'Alembert wave solu-
tion (4.66), as represented by equation (4.80), can be the general solution.
4.13. CONCLUDING REMARKS
Our analysis based on the Fourier series has shown that the classical uncoupling of the
one-dimensional wave equation into ordinary differential equations of undamped vibra-
tions, which supposedly allows of an undamped general solution to the wave equation,
can only result from assuming termwise differentiability of the Fourier series expression
of the solution or integrandwise differentiability of the integral representation of the
Fourier series’ coefficients. These two arbitrary classical assumptions actually are limi-
tations beyond those required for the validity of the Fourier series approach and aim to
assure the uncoupling into ordinary differential equations of undamped vibrations,
which in the conventional view acts as a prerequisite for an undamped general solution
to the one-dimensional wave equation. Thus, choosing such limitations indicates but a
circulating procedure that leads to the result wished, thereby indicating a tautology.

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
106
As a matter of fact, the deformation motion of any continuum necessitates that the in-
ternal stresses be nonconservative, thereby being a source of damping. To specify, the
deformation motion of a continuum obeying a linear stress-strain relation proves to be
responsible for the nonconservative nature of the internal body forces represented by the
stress spatial derivatives, thereby proving to be a source of damping in a continuum,
which implies the damped character of the general solution to the one-dimensional wave
equation. In other words, only the motionless (static) deformation of a continuum can
lead to an undamped response, which, however, cannot comply with a free vibration.
The time continuity of acceleration suffices for the special assumptions of integrand-
wise and termwise differentiability classically imposed on the Fourier series approach to
the wave equation. However, although these assumptions lead to uncoupling the wave
equation into an infinite number of ordinary differential equations representing un-
damped free vibrations of independent single-degree-of-freedom systems, they cannot
necessitate an undamped general solution. Actually, the infinite number of the un-
damped free vibrations by including an infinite number of infinitesimal damping com-
ponents may result in a nonzero damping effect to the wave solution, since the product
of zero times infinity is an indeterminate form and may be nonzero. On the other hand,
removing the limitation of special assumptions allows the Fourier series approach to
uncouple the wave equation of a continuum into an infinite number of ordinary differen-
tial equations representing damped vibrations of independent single-degree-of-freedom
systems, and arrive at a damped general solution to the wave equation.
Our finding that the uncoupling of the one-dimensional wave equation of a continuum
will lead to an infinite number of damped vibrations of single-degree-of-freedom sys-
tems implies that the linear stress-strain relation underlying the one-dimensional wave
equation must actually be equivalent to the nonconservative force-displacement rela-
tions underlying the damped vibrations of single-degree-of-freedom systems resulting
from the uncoupling. This finding overturns the conventional view that a linear stress-
strain relation applied to a continuum is equivalent to a linear force-displacement rela-
tion applied to a discrete system (i.e. a discrete model of a body). In short, a linear
stress-strain relation as applied to a continuum describes nonconservative internal
stresses, and hence, nonconservative internal forces. On the contrary, a linear force-
displacement applied to a discrete system, such as the original Hooke’s law, describes
conservative internal forces. Therefore, a linear stress-strain relation for a continuum

Chapter 4: Damping in the Wave Equation of Continua Ruled by Linear Stress-Strain Relations
107
cannot be equivalent to a linear force-displacement relation for a discrete system.
Finally, a formula for the damped general solution to the wave equation is offered on
the assumption of a constant damping ratio for each mode.
As for the d’Alembert wave solution, it is founded on the inadmissible limitation of
continuous accelerations with respect to time, and hence, it cannot be a real general so-
lution to the one-dimensional wave equation. Hence, its space and time periodicity,
which assures its undamped character, cannot suffice for the undamped character of the
really general solution to the wave equation. On the other hand, the d’Alembert wave
solution proves to be equivalent to the undamped solution obtained by means of Fourier
series on the assumptions of the integrandwise or termwise differentiability, which veri-
fies that the d’Alembert solution is not the general solution sought.
The above findings disclose that all Physics theories founded on the consideration of
undamped waves in a continuum ruled by a linear stress-strain relation actually lack
consistency, thereby disclosing the need for a reconsideration of these theories.

108
CHAPTER 5
DAMPING IN THE GENERAL SOLUTION TO THE
ELASTODYNAMIC PROBLEM OF A CONTINUUM
5.1. GENERAL
In this chapter we extend the analysis of the preceding chapter to an elastic continuum
undergoing a forced vibration and identify the error in classical analysis that led to con-
servative internal stresses and undamped response of the elastic continuum instead of
the actual nonconservative internal stresses and damped response.
Chapter 5 is an advance on two earlier publications [78], [79], and aims to mathematically
elucidate damping as an effect inherent in the dynamics of elastic continua. To this
goal, the continuum model of an elastic column obeying the generalized Hooke’s law
and subjected to an axial surface traction at its free end, as well as to arbitrarily chosen
initial conditions, is put under examination.
In the classical view, the elastic stresses are classified as conservative stresses, which,
due to the boundary stress conditions, cannot allow the surface traction to be
nonconservative, thereby allowing only an undamped response of the elastic column.
The original approach to this view applies the modal analysis introduced by Bernoulli in
1753 [1 pp.502-522], i.e. the later known as Fourier series analysis with respect to a
family of orthogonal functions, and by separating variables uncouples the partial differ-
ential equation of motion of the column into an infinite number of ordinary differential
equations, with each one describing an undamped vibration of a generalized single-
degree-of-freedom system. Each one of the corresponding undamped generalized dis-
placements is multiplied by a function of the position variable (mode), and all products
are superimposed to form the response of the elastic continuum.
In this chapter, it is firstly shown that the modal analysis of the partial differential equa-
tion of motion will lead to uncoupling into an infinite number of undamped vibrations

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
109
of single-degree-of-freedom systems only by means of two arbitrary assumptions:
1) differentiation of the integral representation of a Fourier coefficient (i.e. a general-
ized displacement) can be carried out by differentiating its integrand, and
2) differentiation of a Fourier series can be carried out by differentiating its terms.
Nevertheless, the general solution to the partial differential equation of motion as super-
position of an infinite number of undamped vibrations of single-degree-of-freedom sys-
tems may not be undamped. Indeed, each one of the undamped vibrations can include
an infinitesimal damping factor, and hence, their superposition can include a product of
infinity by an infinitesimal damping factor. This product, as an indeterminate form,
may be nonzero, which indicates damping. Thus, uncoupling the partial differential
equation of motion into ordinary differential equations of undamped vibrations cannot
suffice for an undamped general solution to the partial differential equation of motion.
On the other hand, acceleration discontinuities with respect to time at a finite number of
any instants in time prove to be admissible to the general solution of the elastodynamic
problem of a continuum. But, this disputes the above two arbitrary assumptions, whose
validity could only be sufficed by the time continuity of the accelerations.
Then, it is shown that the deformation motion is a source of damping for any continu-
um, whether elastic or not, which necessitates a damped general solution to the elasto-
dynamic problem of a continuum. Only a motionless deformation can be undamped.
Last, a damped general solution to the elastodynamic problem of a column is derived by
means of Fourier series after removing the above two arbitrary assumptions.
All in all, this chapter merely highlights the fact that the classical approach to the un-
damped response of an elastic continuum adopts such arbitrary assumptions that a priori
lead to the conclusion of the undamped response, which is but a tautology (circulating
argument). Actually, the classical view of the undamped response of an elastic contin-
uum requires that the internal stresses in the continuum be classified as conservative
stresses, which means that the total work of the internal stresses all over the continuum
must be a single-valued function of only the strains, and hence, the displacements, all
over the continuum [38 pp.90,92-93]. However, only the strain energy, as the part of
the total work of internal stresses that exclusively results from the action of the balanced
stress components at every point of the elastic continuum, is a single-valued function of
only the strains [80]. In fact, there is another part of the total work of internal stresses
that exclusively results from the action of the unbalanced stress components at every
point of the elastic continuum and equals the total work of the stress derivatives

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
110
xx yx zxσ x , τ y , τ z , all over the continuum. This particular work only relates
to the deformation motion of the continuum, according to the partial differential equa-
tions of motion for a point of the continuum [Ch. 2 p.36 eq.(2.1)], [2 p.85 eq.(15)], i.e.
2yxxx zx x
2
2xy yy zy y
2
2yzxz zz z
2
τσ τ uX ρ
x y z t
τ σ τ uY ρ
x y z t
ττ σ uZ ρ
x y z t
(2.1)
where xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ stand for the balanced stress components at a point of the
continuum, while the stress derivatives xx yx zxσ x , τ y , τ z , represent internal
body forces resulting from the unbalanced stress components,
X ,Y ,Z stand for the components of the external body forces per unit of volume
at a point of the continuum, along the x, y, z coordinate axes, respectively,
x y zu ,u ,u stand for the displacements at a point of the continuum, along the
x, y, z coordinate axes, respectively,
ρ stands for the mass density at a point of the continuum.
Besides, the total work of the stress derivatives xx yx zxσ x , τ y , τ z , all over
the continuum proves not to be a single-valued function of only the strains, and hence,
the displacements, which implies that the elastic internal stresses cannot be classified as
conservative stresses. The present chapter explains why classical theory failed to real-
ize it and verifies our research suggesting that the elastic internal stresses be actually
nonconservative, which necessitates that the real general solution to the elastodynamic
problem be damped notwithstanding conventional wisdom [80].
5.2. THE PARTIAL DIFFERENTIAL EQUATION OF MOTION
The continuum model of a uniform elastic column used in the above-mentioned publi-
cations [78], [79] and in the present chapter has been sketched in the following Fig. 5.1

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
111
Fig. 5.1: Continuum model of a uniform elastic column
The symbols used in Fig. 5.1 and also in the ensuing analysis are specified as below
x stands for the level in the elastic column at the initial at-rest state. By defini-
tion, 0x and x L correspond to the fixed end and the free end of the column, re-
spectively, with L standing for the initial at-rest length of the column.
t stands for the time, as measured from the initiation of exciting the column.
p t stands for an axial surface traction applied to the column at its free end.
x,t stands for the axial internal stress developed at the level z of the column.
The partial differential equation of motion of the uniform elastic column subjected to
the external force p t at its free end x L has the form
2 0c u x,t u x,t (5.1)
where u x,t stands for the displacement response at the level x of the column at time
t , with each dot or prime over it denoting a differentiation with reference to the time t
or the level x , respectively,
and c stands for a constant equal to [35 p.408]
c E , (5.2)
with E denoting Young’s modulus of elasticity.
The partial differential equation (5.1) has been derived from combining Newton's se-
cond axiom as applied to the dynamics of an infinitesimal length of the elastic column
0
x
x dx
p t
dx,t
x,t xx
x,t
x=0
x=L

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
112
at level x [7 p.492], viz.
x,t u x,t , (5.3)
and the generalized Hooke's law as a linear relation between the stress x,t and the
strain x,t u x,t at the same level [5 p.58], [7 p.492 eq.(α)], that is,
x,t E x,t E u x,t . (5.4)
The initial conditions 0u x, and 0u x, of the elastic column are in general
0u x, a sin gle valued function of x , (5.5a)
0u x, a sin gle valued function of x . (5.5b)
The influence of the axial surface traction p t on the dynamics of the elastic column is
taken into account through the inhomogeneous (i.e. nonzero) boundary value at x L
L,t p t
u L,tE E
, (5.6a)
while the fixed end at 0x is represented by the homogeneous boundary value
0 0u ,t . (5.6b)
5.3. TRANSFORMING BOUNDARY VALUES INTO HOMOGENEOUS ONES
As is well known, to separate variables in the partial differential equation of motion of
the elastic column of Fig. 5.1 requires homogeneous (i.e. zero) boundary values. Thus,
a transformation of the response function in the partial differential equation of motion
(5.1) is sought so that the inhomogeneous boundary value (5.6a) will be transformed in-
to a homogeneous one [40 pp.435-436]. Such a transformation of the response function
u x,t into a new one, say u x,t , is given as below

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
113
p t
u x,t u x,t xE
. (5.7)
On account of the above transformation, the partial differential equation of motion (5.1),
the initial conditions (5.5) and the boundary values (5.6), we conclude that the follow-
ing partial differential equation in u x,t must hold true
2 22
2 2
ˆ ˆu x,t u x,t p tc x
Ex t
, (5.8)
with the homogeneous boundary values
0 0u L,t
u ,tx
, (5.9)
and the initial conditions
0
0 0p
u x, u x, xE
, (5.10a)
0 00
u x, pu x, x
t E
. (5.10b)
5.4. CLASSICAL UNCOUPLING INTO UNDAMPED VIBRATIONS
The response u x,t can be represented by a Fourier series with respect to a system of
orthogonal functions n x as follows [112 p.489]
0
n n
n
u x,t q t x
, (5.11a)
1
2
0 0
d d
L L
n n nˆq t x x u x,t x x
, (5.11b)
with nq t standing for a Fourier coefficient, the so-called generalized displacement.

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
114
By solving the eigenvalue equation
2
0 withn n n nx c x c cons tant (5.12)
for the homogeneous boundary values
0 0n n L , (5.13)
which corresponds to the homogeneous boundary values (5.9) for a solution of the type
n nq t x to the partial differential equation of motion (5.8), we eventually conclude
the formulation of n x expressing the so-called natural modes as follows
1 2n x sin n x L . (5.14)
Inserting the eigenvalue solution (5.14) in the Fourier series (5.11) yields
0
1 2n
n
u x,t q t sin n x L
, (5.15a)
0
21 2 d
L
n ˆq t u x,t sin n x L xL
. (5.15b)
In suggesting that the infinite series (5.11) and (5.15) both express the response function
u x,t consists Bernoulli’s method for separating variables, uncoupling the partial dif-
ferential equation of motion (5.8) into ordinary differential equations and obtaining the
solution of the former as a superposition of the solutions of the latter [1 pp.502-522].
This method not only preceded and inspired the Fourier series analysis, but also sug-
gested the most general form of a Fourier series representation of a function.
It is worth noting that only under arbitrary assumptions whose realization is not assured,
classical uncoupling of the partial differential equation of motion (5.8) arrives at ordi-
nary differential equations each one of which represents an undamped vibration in the
generalized displacement nq t of a single-degree-of-freedom system. This can be seen
by following either of the existing two alternative approaches:

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
115
5.4.1. Integration approach to classical uncoupling
We can multiply the partial differential equation (5.8) by 1 2sin n x L , integrate
(which justifies the name integration approach) the product from 0x to x L , and get
2 22
2 20 0
1 2 d 1 2 d
L Lˆ ˆu x,t u x,tc sin n πx L x sin n πx L x
x t
0
1 2 d
Lp t
x sin n x L xE
. (5.16)
The first integral of the left-hand member of the above equation after integrating by
parts, and taking into account the homogeneous boundary values (5.9), becomes
22 2
2 20 0
1 21 2 d 1 2 d
L Lu x,t n π
ˆsin n πx L x u x,t sin n πx L xx L
, (5.17)
which, after substituting 2nq t L for its right-hand member integral, in accordance
with the Fourier transform (5.15b), may be rewritten as
22
20
1 2 d 1 22
L
n
u x,t Lsin n πx L x n π L q t
x
. (5.18)
The integral in the right-hand member of equation (5.16), in view of the following
equality [115 p.164 eq. 216]
2
0
11 2 d
1 2
nL
x sin n x L xn L
, (5.19)
becomes equal to
2
0
11 2 d
1 2
nLp t p t
x sin n x L xE E n L
. (5.20)

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
116
It is classically assumed that the really valid rule for differentiating the Fourier trans-
form (5.15b) to the second order, that is,
2
20
21 2 d
L
n ˆq t u x,t sin n x L xL t
, (5.21)
can equally be expressed by interchanging the differentiation and integration signs,
thereby differentiating the integrand of the integral instead of the integral itself (this is
hereafter called integrandwise differentiability assumption), viz.
2
20
21 2 d
L
n
u x,tq t sin n x L x
L t
. (5.22)
Actually, only the continuity of the acceleration 2 2u x,t t with respect to both of t
and x , which, however, is not given, can suffice for the above assumption [44 p.348],
[112 p.286, Leibnitz’s rule]. Moreover, the continuity of the acceleration 2 2u z,t t
necessitates the continuity of the derivative nq t [111 p.263, theorem].
Now, combining the integrandwise differentiability assumption (5.22) with equations
(5.16), (5.18) and (5.20) yields the ordinary differential equations [27 p.212]
2
2 2
2 1for 0,1, 2,3,…
1 2
n
n n n
p t Lq t q t n=
E n
, (5.23)
where n represents a natural angular frequency of the elastic column equal to
1 2n n c L . (5.24)
Operating similarly on the initial conditions (5.10), but without using any assumption at
all, yields the initial conditions of the generalized displacement nq t as follows
2 2
0
0 2 120 0 1 2 d
1 2
nL
n
p Lq u x, sin n x L x
L E n
, (5.25a)

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
117
2 2
0
0 2 120 0 1 2 d
1 2
nL
n
p Lq u x, sin n x L x
L E n
. (5.25b)
It is emphasized that each one of the ordinary differential equations (5.23) describes a
forced vibration of a single-degree-of-freedom system in a generalized displacement
nq t , with the system internal force being equal to 2n nq t , and, by virtue of the ini-
tial conditions (5.25), is easy to be solved for a known surface traction p t . Putting
the surface traction equal to zero, i.e. 0p t , in the ordinary differential equations
(5.23) and the initial conditions (5.25), we can cover the case of the free vibration of the
continuum. Moreover, the lack of a damping term in the left-hand member of each or-
dinary differential equation (5.23) suffices for the undamped nature of the solution
nq t to each ordinary differential equation (5.23).
On account of the integrandwise differentiability assumption (5.22), the family of the
ordinary differential equations (5.23) is equivalent to the partial differential equation of
motion (5.8), which, by the Fourier series (5.15a), implies that the solution to the partial
differential equation (5.8) equals a superposition of the solutions to the infinite number
of ordinary differential equations (5.23). And since the latter solutions are undamped,
the former solution is conventionally considered to be undamped too. Actually, this
consideration is incorrect; for a superposition of an infinite number of infinitesimal
damping factors included in the infinite number of undamped vibrations (5.23) may take
on a nonzero finite value, which indicates damping. That is, the classical uncoupling
into the ordinary differential equations (5.23) with no damping cannot assure that the
general solution to the partial differential equation of motion (5.8) is undamped.
5.4.2. Differentiation approach to classical uncoupling
In the classical view, if we differentiate (which justifies the name differentiation ap-
proach) the terms of the Fourier series (5.15a) twice with reference to t or twice with
reference to x , the resulting series represent the partial derivatives 2 2u x,t t and
2 2u x,t x , respectively. Then, substituting these series representations for the de-
rivatives in the partial differential equation (5.8), we can obtain an infinite series, which,

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
118
by virtue of the orthogonality of the natural modes 1 2n x sin n x L , can be
uncoupled into the ordinary differential equations (5.23).
According to this classical view, the really valid rule for differentiating the Fourier se-
ries (5.15a) to the second order, that is,
2 2
2 20
1 2n
n
u x,tq t sin n πx L
t t
, (5.26a)
2 2
2 20
1 2n
n
u x,tq t sin n πx L
x z
, (5.26b)
can equally be expressed by interchanging the differentiation and summation signs,
thereby substituting the sum of the derivatives of the terms of the series for the deriva-
tive of the series (this is hereafter called termwise differentiability assumption), viz.
2
20
1 2n
n
u x,tq t sin n πx L
t
, (5.27a)
2 2
2 20
d1 2
dn
n
u x,tq t sin n πx L
x x
. (5.27b)
Actually, only the uniform convergence of the infinite series in equations (5.27), which,
however, is not given, can assure the above assumption [44 p.29], [112 p. 417]. Moreo-
ver, the uniform convergence of the infinite series in equation (5.27b) and the apparent
continuity of the functions nq t and 2 2d 1 2 dsin n πx L x entail the continuity of
the derivative 2 2u x,t x with respect to both of x and t [44 p.29, theorem II].
Now, applying the termwise differentiation rules (5.27) to the partial differential equa-
tion of motion (5.8), multiplying the resulting equation by 1 2sin ν x L for
1 2 3ν , , , , integrating the product all over the column length L , taking into account
that the second-order derivative of the natural mode 1 2n x sin n x L by e-
quation (5.24) becomes equal to
2
2
2
d1 2 1 2
dnsin n x L c sin n x L
x , (5.28)

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
119
and using the orthogonality property of the natural modes 1 2n x sin n x L
0
0 for
1 2 1 2 dfor ,
2
L n ν
sin n πx L sin ν πx L x Ln ν
(5.29)
classical analysis can derive the ordinary differential equations (5.23) directly from the
partial differential equation (5.8) on the assumption of termwise differentiability (5.27).
Operating similarly, the initial conditions (5.25) can be recovered. Thus, assuming the
termwise differentiability (5.27), all conclusions derived from the integration approach
can also be derived from the differentiation approach.
5.5. THE CLASSICAL UNDAMPED SOLUTION
The general solution of the undamped ordinary differential equations (5.23) equals [35
p.234 eq.(5.22)]
2 20
0 2 11 10 d
1 2
n tn
n n n n nn n
q Lq t q cos t sin t p sin t
En
, (5.30)
which substituting the initial conditions (5.25) for 0nq and 0nq yields
2 20
2 1 01 10 d
1 2
n t
n n n nn n
L pq t p cos t sin t p sin t
En
0
20 1 2 d
L
nu x, sin n x L x cos tL
0
1 20 1 2 d
L
nn
u x, sin n x L x sin tL
, (5.31)
and after making use of the Fourier series (5.15a) and equation (5.24) gives the classical
undamped general solution to the partial differential equation of motion (5.8), i.e.

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
120
2
20
1 020
n
n nnn n
pcu x,t p cos t sin t
L E
0
1d
t
nn
p sin t
0
20 1 2 d
L
nu x, sin n x L x cos tL
0
1 20 1 2 d
Ln
nn
u x, sin n x L x sin t sin xL c
. (5.32)
This superposition solution is conventionally taken for undamped, although it includes
the sum of an infinite number of zero damping components, each one of which is in-
cluded in one of the superposed solutions. The sum, as the product of infinity by zero,
is indeterminate and may be nonzero, which indicates damping in the continuum.
Combining equations (5.32) and (5.7), we conclude the classical undamped general so-
lution to the partial differential equation of motion (5.1), i.e.
2
20
1 020
n
n nnn n
p t pcu x,t x p cos t sin t
E L E
0
1d
t
nn
p sin t
0
20 1 2 d
L
nu x, sin n x L x cos tL
0
1 20 1 2 d
Ln
nn
u x, sin n x L x sin t sin xL c
. (5.33)
5.6. EQUIVALENCE BETWEEN THE INTEGRANDWISE AND TERMWISE
DIFFERENTIABILITY ASSUMPTIONS
It is important for this chapter to identify the equivalence of the integrandwise and
termwise differentiability assumptions (5.22) and (5.27). To this goal, we can multiply

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
121
the ordinary differential equation (5.23) by 1 2sin n x L , combine the resulting
product with equations (5.24) and (5.28), and get
2
2
2
d1 2 1 2
dn nq t sin n x L c q t sin n x L
x
2 2
2 11 2
1 2
np t L
sin n x LE n
. (5.34)
Summing up all equations (5.34) for 0 1 2 3n , , , , entails
2
2
20 0
d1 2 1 2
dn n
n n
q t sin n x L c q t sin n x Lx
2 20
121 2
1 2
n
n
p t Lsin n x L
E n
. (5.35)
Substituting x for the function u x,t in Fourier series (5.15) and combining with equa-
tion (5.19), x can be expressed as the following Fourier series
2 20
121 2
1 2
n
n
Lx sin n x L
n
, (5.36)
which inserting in equation (5.35) results in
2
2
20 0
d1 2 1 2
dn n
n n
p tq t sin n x L c q t sin n x L x
Ex
. (5.37)
Series equation (5.37) as a superposition of the ordinary differential equations (5.23)
must be equivalent to the partial differential equation of motion (5.8), exclusively on the
integrandwise differentiability assumption (5.22) or the termwise differentiability as-
sumption (5.27). The equivalence of the two equations proves the equivalence of the
two assumptions. Indeed, expressing the derivative 2 2u x,t t by means of a Fourier
series with respect to the natural modes 1 2n x sin n x L results in

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
122
2
20
1 2n
n
u x,tg t sin n x L
t
, (5.38a)
2
20
21 2 d
L
n
u x,tg t sin n x L x
L t
, (5.38b)
with ng t standing for a Fourier coefficient that denotes a generalized acceleration.
Further, due to the integrandwise differentiability assumption (5.22), the Fourier trans-
form (5.38b) yields
n ng t q t , (5.39)
and substituting in the Fourier transform (5.38a) gives the termwise differentiation rule
(5.27a), which by equation (5.37) and the partial differential equation of motion (5.8)
results in the termwise differentiation rule (5.27b). And inversely, the assumption of
termwise differentiability (5.27a) via the Fourier series (5.38) assures equality (5.39),
thereby proving to be equal to the assumption of integrandwise differentiability (5.22).
In conclusion, the integrandwise differentiability assumption (5.22) and the termwise
differentiability (5.27) must be equivalent to each other. This equivalence implies that
the continuity of the derivative 2 2u x,t t with respect to both of t and x is a suffi-
cient condition not only for the integrandwise differentiability (5.22), but also for the
termwise differentiability (5.27). Similarly, the uniform convergence of the infinite se-
ries in equations (5.27) is a sufficient condition not only for the termwise differentiabil-
ity (5.27), but also for the integrandwise differentiability (5.22).
5.7. DAMPING EFFECT OF DEFORMATION MOTION
In this paragraph it is shown that the deformation motion of an elastic continuum is re-
sponsible for the nonconservative nature of the internal body forces represented by the
stress derivatives xx yx zxσ x , τ y , τ z , , thereby being a source of damping in
the elastic continuum, despite the conventional views that damped means inelastic.
Recalling the classical definition of strains as first-order spatial derivatives of the dis-

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
123
placements in a continuum and the generalized Hooke’s law, it is deduced that the
strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ at any point of an elastic continuum, and hence, the strain
energy of the elastic continuum, can be derived as a single-valued function of only the
displacements x y zu ,u ,u all over the continuum, irrespective of the deformation motion.
On the contrary, a displacement distribution x y zu ,u ,u all over a dynamically excited
continuum can actually be related to many different velocity distributions x y zu ,u ,u , and
hence, to many different values of kinetic energy of the continuum. Thus, by means of
the equality between the kinetic energy and the total work of the accelerating forces
x y zρ u , ρ u , ρ u along the displacements x y zu ,u ,u all over the continuum, it is de-
duced that no single-valued relation can exist between the displacements x y zu ,u ,u all
over the continuum and the total work of the accelerating forces x y zρ u , ρ u , ρ u .
Furthermore, as a consequence of the partial differential equations (5.1) for the motion
of an arbitrary point of the continuum, the total work of the accelerating forces
x y zρ u , ρ u , ρ u along the displacements x y zu ,u ,u of all the continuum must be equal
to the corresponding total work of the stress derivatives xx yx zxσ x , τ y , τ z ,
plus the corresponding total work of the external body forces X ,Y ,Z . But, for the
elastodynamic problem of a continuum, the magnitudes of the external body forces
X ,Y ,Z introduced in the partial differential equations (5.1) are in addition to those re-
ferred to the initial at-rest equilibrium of the continuum. And since these additional
magnitudes of the external body forces X ,Y ,Z are usually equal to zero everywhere in
the continuum, the total work of the accelerating forces x y zρ u , ρ u , ρ u of the elastic
continuum along the displacements x y zu ,u ,u all over the continuum equals the corre-
sponding total work of the stress derivatives xx yx zxσ x , τ y , τ z , This equality
leads to the conclusion that there cannot be defined any single-valued relation between
the total work of the stress derivatives xx yx zxσ x , τ y , τ z , of the elastic con-
tinuum and the displacements x y zu ,u ,u all over the continuum. On this point, it is
worth noticing that the same conclusion is deduced for the general case of applying
nonzero additional magnitudes of conservative external body forces X ,Y ,Z , whose to-
tal work by definition is a single-valued function of the displacements x y zu ,u ,u all over
the continuum. In view of the classification criterion for conservative and nonconserva-
tive stress components given in par. 5.1 and par. 2.4 of Ch. 2, the above conclusion

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
124
means that the stress derivatives xx yx zxσ x , τ y , τ z , , which result from the
unbalanced stress components d d dxx yx zxσ x x, τ y y, τ z z, and act as in-
ternal body forces in the elastic continuum, must be classified as nonconservative inter-
nal body forces. And taking into account that the total work of the stress derivatives
xx yx zxσ x , τ y , τ z , by definition coincides with the total work of the unbal-
anced stress components d d dxx yx zxσ x x, τ y y, τ z z, , it is deduced that
the unbalanced stress components of the elastic continuum must be classified as
nonconservative stress components. This finding proves the damping effect of the in-
ternal stresses in an elastic continuum undergoing dynamical deformation.
On the other hand, the total work of the balanced stress components all over an elastic
continuum, which equals the strain energy of the continuum, by Hooke’s law becomes a
single-valued function of only the strains xx yy zz xy yz xzε ,ε ,ε ,γ ,γ ,γ , and hence, the dis-
placements x y zu ,u ,u , all over the continuum. Thus, the total work of the balanced
stress components all over the elastic continuum must be a single-valued function of on-
ly the displacements x y zu ,u ,u all over the continuum. This single-valuedness, in view
of the definition of conservative and nonconservative stresses given in par. 5.1, implies
that the balanced stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ ruled by Hooke’s law, i.e.
x,t E x,t , and developed across the boundary surface of every infinitesimal el-
ement in the elastic continuum must be classified as conservative stress components.
Consequently, in an elastic continuum ruled by Hooke’s law, the internal stresses de-
veloped at every infinitesimal element as the resultants of both the unbalanced stress
components d d dxx yx zxσ x x, τ y y, τ z z, and the balanced stress compo-
nents xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ must be classified as nonconservative stresses.
On this basis therefore, the deformation motion of an elastic continuum can prove and
fully justify the existence of damping within the elastic continuum, and hence, the
damped character of the general solution to the elastodynamic problem of a continuum.
This theoretical finding offers a consistent explanation for the damping related to the
hysteresis loops observed in all dynamic tests of elastic bodies and assures that the ex-
periment actually complies with Hooke’s law, which contradicts conventional wisdom
supporting that the experiment indicates a defect of Hooke’s law [2 pp.120-121].

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
125
5.8. DAMPING EFFECT OF REMOVING THE CLASSICAL ASSUMPTIONS
OF INTEGRANDWISE AND TERMWISE DIFFERENTIABILITY
Owing to the damping effect of the deformation motion of a continuum, the classical as-
sumptions of integrandwise differentiability (5.22) and termwise differentiability (5.27)
cannot result in an undamped general solution to the partial differential equation (5.8).
On the other hand, acceleration discontinuities with respect to time at a finite number of
any instants in time prove to be admissible to the general solution of the elastodynamic
problem, which disputes the sufficient condition of continuous accelerations for the va-
lidity of the integrandwise and termwise differentiability assumptions (5.22) and (5.27),
thereby disputing the undamped uncoupling of the partial differential equation (5.8).
Besides, even for an undamped uncoupling, the sum of the infinite number of the un-
coupled undamped solutions may not be undamped, since the product of infinity by the
zero damping of each uncoupled undamped solution may give nonzero damping.
So, there is no reason for the integrandwise and termwise differentiability assumptions.
5.8.1. Admissibilty of acceleration discontinuities
It is always possible to abruptly apply to the elastic column (or any other body) an infin-
itesimal additional velocity distribution u x,t at a finite number of any instants in time,
without, however, affecting the displacement response u x,t of the column (or any
other body) for any finite period of time t . After all, an infinitesimal velocity distribu-
tion acting for a finite period of time t can only yield an infinitesimal displacement dis-
tribution, thereby leaving unaffected the general solution of the elastodynamic (or any
other dynamic) problem. Therefore, the possibility of applying infinitesimal additional
velocity distributions at a finite number of any instants in time must be admissible to the
general solution. And since this possibility equals the possibility of applying additional
finite acceleration distributions u x,t of infinitesimal duration at a finite number of any
instants in time, which constitute finite discontinuities of the acceleration distribution
u x,t with respect to time, it is deduced that such acceleration discontinuities must be
admissible to the general solution of the elastodynamic problem.

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
126
5.8.2. Damping effect of removing the integrandwise differentiability assumption
We firstly examine the effect of replacing the arbitrary integrandwise differentiability
assumption (5.22) with the undisputable general differentiation rule (5.21) defining the
actual magnitude nq t ,
2
20
21 2 d
L
n ˆq t u x,t sin n x L xL t
. (5.21)
This rule is derived from the Fourier transform (5.15b) and can equally be written as
2
2
20
21 2 d
L
n n n
u x,tq t sin n x L x y t
L t
, (5.40)
where 2n ny t stands for a generalized acceleration representing the difference be-
tween the actual magnitude and the classically assumed equivalent of nq t , as given by
equations (5.21) and (5.22), respectively. Since 2n is an angular frequency, it follows
that ny t must denote a generalized displacement. By virtue of equations (5.21) and
(5.40), the generalized displacement ny t can analytically be expressed in terms of the
response u x,t and the mode 1 2n x sin n x L as below
2
2 2
0
21 2 d
L
n
n
u x,ty t sin n x L x
L t
2
2
0
1 2 d
L
u x,t sin n x L xt
(5.41)
In view of equation (5.40) or (5.41), the generalized displacement ny t can only be ze-
ro on the assumption of the integrandwise differentiability (5.22), that is,
0ny t integrandwise differentiability assumption (5.22) . (5.42a)
Combining the undisputable general differentiation rule (5.40) with equations (5.16),

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
127
(5.18) and (5.20) yields the ordinary differential equations
2
2 2
2 1for 0,1, 2,3,…
1 2
n
n n n n
p t Lq t q t y t n=
E n
(5.43)
The ordinary differential equations (5.43) represent the general form of the ordinary dif-
ferential equations in the generalized displacements nq t that can be derived from un-
coupling the partial differential equation of motion (5.8). Since the ordinary differential
equations (5.43) are equivalent to the partial differential equation (5.8), the possibility
of the former to represent damped vibrations will indicate the damped character of the
general solution to the partial differential equation (5.8). So, let us examine whether the
ordinary differential equations (5.43) represent damped or undamped vibrations.
Evidently, each ordinary differential equation (5.43) describes a forced vibration of a
single-degree-of-freedom system in a generalized displacement nq t , with the system
internal force 2n n nq t y t having magnitude dependent not only on the dis-
placement nq t of its application point but also on the displacement ny t , which, by
equation (5.21) and by the left-hand integral of the right-hand member of equation
(5.41), is not a single-valued function of only nq t . This latter implies that the work of
the system internal force 2n n nq t y t along the displacement nq t is not a sin-
gle-valued function of only the displacement nq t , thereby implying that the system
internal force 2n n nq t y t is nonconservative [38 p.90], [111 pp.3-4]. And since
2n nq t is its conservative component, it follows that 2
n ny t is its nonconservative
component. This implication makes each ordinary differential equation (5.43) in gen-
eral represent a damped vibration of a single-degree-of-freedom system.
On this base therefore, the partial differential equation of motion (5.8) must in general
describe a damped motion. Only assuming the integrandwise differentiability (5.22),
which implies 0ny t , the internal force 2n n nq t y t is reduced to 2
n nq t ,
thereby becoming exclusively dependent on the displacement nq t , and hence, conser-
vative. Accordingly, the ordinary differential equations (5.43) are reduced to the classi-
cal ordinary differential equations (5.23), which means that only on the condition of the
integrandwise differentiability (5.22) the motion of the continuum can be uncoupled
into undamped motions of single-degree-of-freedom systems.

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
128
In conclusion, the damping effect of the deformation motion of an elastic continuum
obeying Hooke’s law, as shown in par. 5.7 and experimentally verified by the so-called
elastic hysteresis [2 pp.120-121], fully complies with the nonconservative nature of the
internal force component 2n ny t of the ordinary differential equations (5.43).
5.8.3. Damping effect of removing the termwise differentiability assumption
We now examine the effect of replacing the arbitrary termwise differentiability assump-
tion (5.27) with the undisputable general differentiation rules that consist in expressing
the partial derivatives 2 2u x,t t and 2 2u x,t x with a possible finite number of
finite discontinuities as the Fourier series
2
120
1 2n
n
u x,tt sin n x L
t
, (5.44a)
2
220
1 2n
n
u x,tt sin n x L
x
, (5.44b)
where 1n t and 2n t stand for the coefficients of the Fourier series of the deriva-
tives 2 2u x,t t and 2 2u x,t x with reference to the orthogonal function
1 2sin n x L . As for their magnitudes, the Fourier coefficients 1n t and
2n t evidently represent a generalized acceleration and a generalized curvature, re-
spectively, and by analogy with the Fourier transform (5.15b) prove to be equal to
2
1 20
21 2 d
L
n
u x,tt sin n x L x
L t
, (5.45a)
2
2 20
21 2
L
n
u x,tt sin n x L
L x
. (5.45b)
By using the Fourier series (5.44) instead of the termwise differentiability assumption
(5.27), we actually assume that the Fourier series of the derivatives 2 2u x,t t and

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
129
2 2u x,t x merely converge to the derivatives instead of uniformly converging.
The Fourier coefficients 1n t and 2n t can be transformed as follows
21 1n n n nt q t y t , (5.46a)
2
2 22
nn n nt q t y t
c
, (5.46b)
with nq t denoting the actual magnitude defined by the undisputable equation (5.21)
and 1ny t , 2ny t denoting two new generalized displacements.
By means of transformations (5.46), the Fourier series (5.44) is given the form
22
120
1 2n n n
n
u x,tq t y t sin n x L
t
, (5.47a)
2 2
22 20
1 2nn n
n
u x,tq t y t sin n x L
x c
. (5.47b)
So, 21n ny t and 2ny t prove to be the differences of the actual coefficients 1n t
and 2n t of the Fourier series (5.44) of the derivatives 2 2u x,t t , 2 2u x,t x
from the actual generalized magnitudes nq t and nq t , respectively. These differ-
ences become zero only by virtue of the termwise differentiability assumption (5.27).
Inserting equations (5.47) in the partial differential equation of motion (5.8), using
equations (5.28) and (5.36), and rearranging terms will give
21 2
0
1 2n n n n n
n
q t q t y t y t sin n x L
2 20
121 2
1 2
n
n
p t Lsin n x L
E n
, (5.48)
which after substituting
1 2n n ny t y t y t , (5.49)

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
130
becomes
2
0
1 2n n n n
n
q t q t y t sin n x L
2 20
121 2
1 2
n
n
p t Lsin n x L
E n
. (5.50)
Multiplying equation (5.50) by 1 2sin ν x L with 0 1 2 3ν , , , , , integrating the
resulting equation all over the length L of the column, interchanging the order of inte-
gration and summation, and taking into account the orthogonality property (5.29), we
can finally conclude that equation (5.50) is equivalent to
2
2 2
2 1for 0,1, 2,3,…
1 2
n
n n n n
p t Lq t q t y t n=
E n
(5.43)
In view of the ordinary differential equations (5.23) and the analysis of par. 5.4.2, ny t
can only be zero on the termwise differentiability assumption (5.27), that is,
0ny t termwise differentiability assumption (5.27) . (5.42b)
Thus, all findings derived from replacing the disputable integrandwise differentiation
rule (5.22) with the undisputable general differentiation rule (5.40) can also be derived
from replacing the disputable termwise differentiation rule (5.27) with the undisputable
general differentiation rules (5.44). It is worth noting that owing to equation (5.43), the
magnitude of ny t can be estimated by means of equation (5.41).
5.9. NONCONSERVATIVE ELASTIC INTERNAL BODY FORCES
After removing the termwise differentiability assumption (5.27), and hence, its equiva-
lent integrandwise differentiability assumption (5.22), the work of the internal body
forces x,t x developed all over the elastic column proves not to be a single-
valued function of the displacements u x,t developed all over the column.

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
131
Indeed, from equation (5.4), and taking into account equation (5.7), it follows
2 2
2 2
ˆx,t u x,t u x,tE E
x x x
, (5.51)
which combined with equation (5.47b) yields
0
2n
n 2n2n
x,tE q t y t sin n 1 2 x L
x c
. (5.52)
On account of equation (5.52), the total work σ xW of the internal body forces
x,t x along the displacements u x,t all over the elastic column becomes equal to
0 0
d d
L t
σ x
ˆσ x,τ u x,τW A τ x
x t
2
2200 0
1 2 d d
L tn
n n
n
u x,τωE A q τ y τ sin n πx L τ x
tc
, (5.53)
where A stands for the cross-section area of the column.
It is noticed that the Fourier transform (5.15b) and the continuity of the velocity
u x,t t resulting from the existence of the acceleration 2 2u x,t t , in view of the
Leibnitz rule [44 p. 348], [112 p.286], give
0
21 2 d
L
n
u x,tq t sin n x L x
L t
, (5.54)
which by means of the Fourier transformation (5.15) as applied to the velocity
u x,t t with respect to the orthogonal functions 1 2sin n x L implies that
0
1 2n
n
u x,tq t sin n πx L
t
. (5.55)

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
132
Equation (5.53) after inserting equations (5.2) and (5.55), making use of the
orthogonality property (5.29), and interchanging summation and integration signs and
, becomes
22
2
0 0 0
1 2 d d
L t
σ x n n n n
n
W ρ A ω sin n πx L x q τ y τ q τ τ
2 22
0 0
2 d4
t
n n n n
n
ρ A Lω q τ y τ q τ τ
, (5.56)
which by means of the Fourier transforms (5.15b) and (5.54) results in
2
2
0 0
1 2 d
L
σ x n
n
ρ AˆW ω u x,t sin n πx L x
L
2
0 0
1 2 d d
t L
n
u x,τL y τ sin n πx L x τ
t
. (5.57)
The above result indicates that the total work σ xW of the stress derivatives σ x,t x
all over the elastic column is not a single-valued function of only the displacements
u x,t all over the column. It also depends on all history of the generalized displace-
ments 2ny t and the velocities u x,t t up to time t , which makes the stress deriva-
tives σ x,t x be classified as nonconservative internal body forces of the elastic col-
umn for the case of dynamic deformation. Only on the integrandwise or termwise dif-
ferentiation assumption (5.42), which implies 2 0ny t , the dependence on the history
of the generalized displacements 2ny t and the velocities u x,t t up to time t is
eliminated, which makes the total work σ xW become a single-valued function of only
the displacements u x,t , thereby making the stress derivatives σ x,t x become
conservative internal body forces.

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
133
5.10. INTRODUCTION OF DAMPING RATIOS
The velocity magnitude n ny t can be related to the generalized velocity nq t as
below
2n n n ny t t q t , (5.58)
where n t denotes a scalar coefficient defined as a function of the time t . This defi-
nition reflects the fact that owing to the continuity of the functions ny t and nq t ,
there must be a single-valued relation between them at each time instant t .
Inserting relation (5.58) into the ordinary differential equations (5.43) gives them the
elastic-viscous form
2
2 2
2 12 for = 0,1, 2,3,…
1 2
n
n n n n n n n
p t Lq t t;q q t q t n
E n
, (5.59)
On account of the nonconservative nature of the internal force 2n ny t and in view of
equation (5.58), the magnitude 2 n n nt q t should represent a nonconservative
force, which discloses that the scalar coefficient n nt;q is but the damping ratio of the
thn mode. Thus, the partial differential equation (5.8) is in general uncoupled into the
nonlinear ordinary differential equations (5.59), which represent damped vibrations, and
not into the classical ordinary differential equations (5.23), which represent undamped
vibrations.
5.11. COMPUTATION OF THE GENERAL SOLUTION
Inserting the damped general solution of the ordinary differential equation (5.59) in the
Fourier transform (5.15a) and combining with transformation (5.7) gives the really gen-
eral solution to the initial-boundary value problem of the uniform elastic column, which
must also be damped in view of the equivalence between the ordinary differential equa-
tions (5.59) and the partial differential equation (5.8).

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
134
Let us assume that the damping ratios n t for = 0,1,2,3,…n approximate constants
for 0,1,2,3,…n nt n (5.60)
that are invariable endogenous characteristics of the elastic column (or any other elastic
body considered), and hence, independent of the applied loading. Then equation (5.59)
becomes
2
2 2
2 12 for = 0,1, 2,3,…
1 2
n
n n n n n n
p t Lq t q t q t n
E n
(5.61)
whose general solution equals [35 p.234 eq.(5.22)]
2 2
2
0 00 1 1
1
n nn n n nt
n n n n n n
n n
q qq t e q cos t sin t
2
2 2 20
2 1 1 11 d
1 2 1
n n
n tt
n n
n n
Lp e sin t
En
, (5.62)
with the initial conditions 0nq and 0nq defined by equations (5.25).
Inserting equation (5.62) in the Fourier transform (5.15a) and making use of equation
(5.24) implies
2 2
20
0 00 1 1
1
n n t n n n nnn n n n n
n n n
q qu x,t sin x e q cos t sin t
c
2
2 2 20
2 1 1 11 d
1 2 1
n n
n tt
n n
n n
Lp e sin t
En
, (5.63)
and substituting in equation (5.7) results in the determination of the original response
u x,t .

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
135
5.12. CONCLUDING REMARKS
On the base of the above analysis, our criticism of the classical view that the general so-
lution to the elastodynamic problem of a continuum is undamped seems to be fully jus-
tified. Actually, the deformation motion of any continuum necessitates that the internal
stresses be nonconservative, thereby being a source of damping. To specify, the defor-
mation motion of a continuum proves to be responsible for the nonconservative nature
of the internal body forces represented by the stress spatial derivatives, thereby proving
to be a source of damping in an elastic continuum, which implies the damped character
of the general solution to the elastodynamic problem of a continuum. Thus, only the
motionless (static) deformation can lead to an undamped solution, thereby being a nec-
essary condition for an undamped solution to the elastodynamic problem.
As a matter of fact, the Fourier approach to the elastodynamic problem leads to uncou-
pling the partial differential equation of motion into ordinary differential equations of
undamped vibrations, which supposedly allows of an undamped general solution to the
elastodynamic problem, only by means of arbitrary special assumptions. That is, the as-
sumption of termwise differentiability of the Fourier series expression of the solution or
the assumption of integrandwise differentiability of the integral representation of the
coefficients of the Fourier series. These two assumptions actually are limitations be-
yond those required for the validity of the Fourier series analysis and aim to allow of an
undamped general solution to the partial differential equation of motion. But, such a
proof of the undamped character of the general solution constitutes a circulating proce-
dure that by definition leads to the result wished, and hence, a tautology.
The time continuity of acceleration suffices for the special assumption of integrandwise
and termwise differentiability imposed by the classical analysis on the Fourier series
approach to the elastodynamic problem. However, although these assumptions lead to
uncoupling the partial differential equation of motion of an elastic continuum into an in-
finite number of ordinary differential equations representing undamped vibrations of in-
dependent single-degree-of-freedom systems, they cannot necessitate an undamped
general solution. Actually, the infinite number of the undamped vibrations by introduc-
ing an infinite number of infinitesimal damping components to the general solution may
result in a nonzero damping effect, since the product of zero times infinity is an inde-
terminate form and may be nonzero. On the other hand, removing the limitation of the

Chapter 5: Damping in the General Solution to the Elastodynamic Problem of a Continuum
136
special assumptions allows the Fourier series approach to uncouple the partial differen-
tial equation of motion of an elastic continuum into an infinite number of ordinary dif-
ferential equations representing damped vibrations of independent single-degree-of-
freedom systems, and arrive at a damped general solution to the problem.
Our finding that the uncoupling of the partial differential equation of motion of an elas-
tic continuum leads to an infinite number of damped vibrations of single-degree-of-
freedom systems implies that the stress-strain formulation of the generalized Hooke’s
law underlying the partial differential equation of motion must actually be equivalent to
the nonconservative force-displacement relations underlying the damped vibrations.
This finding overturns the conventional view that the stress-strain formulation of the
generalized Hooke’s law as applied to a continuum is equivalent to the force-
displacement formulation of Hooke’s law as applied to a discrete system (i.e. a discrete
model of a body). In short, the generalized Hooke’s law as applied to a continuum de-
scribes nonconservative internal stresses, while the original Hooke’s law as applied to a
discrete system describes conservative internal forces.
Finally, a formula for the damped general solution to the elastodynamic problem of the
column has been derived on the assumption of a constant damping ratio for each mode.

137
CHAPTER 6
COMPUTATION OF INTERNAL DAMPING AND
ACTUAL RESPONSE IN ELASTIC STRUCTURES
6.1. GENERAL
Chapters 2 up to 5 have elucidated and justified the analysis of Chapter 1, par. 1.4,
which suggests a necessary correction of the classical matrix approach to the dynamics
of an elastic continuous structure ruled by the generalized Hooke’s law. This correction
requires that the exact dynamic relations (1.23) and (1.28),
x, y,z;t x, y,z x, y,z;t t u a a U , (1.23)
x, y,z;t x, y,z x, y,z;t t ε b b U , (1.28)
be used instead of the static classical relations (1.27) and (1.32)
x, y,z;t x, y,z t u a U , (1.27)
x, y,z;t x, y,z t ε b U , (1.32)
for expressing x, y,z;tu and x, y,z;tε in terms of tU , thereby requiring that the
magnitudes x, y,z;ta and x, y,z;tb be computed. It is noticed that the magni-
tudes x, y,z;tb and x,y,zb can be derived from the magnitudes x, y,z;ta and
x,y,za , respectively, by differentiation with respect to the coordinates x,y,z , while
the magnitudes x,y,za and x,y,zb can well be determined by classical theory [20].

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
138
Further, introducing the magnitudes x, y,za , x, y,z;ta , x, y,zb , x, y,z;tb ,
x, y,zκ , x, y,z;tX , and x, y,z;tT x, y,zb in equations (1.42),
Δ Δ Δ
Δ Δ
Δ Δ
Δ Δ Δ
Δ Δ
d
d
2 d
d
d
d
d d
T
V
T T
V
T T
V
T T
V
T
V
T T
V
T T T T
V S
V
t V
t V
t V
V
t V
t V S
M a a
M a a a a a
C a a a
D a a a
K b κ b
K b κ b b κ b b
P a a X a a T
(1.42)
and using the matrix differential equation of motion (1.41),
Δ t t t t t t t t M M U C U K K D U P , (1.41)
we can compute the actual displacement matrix tU . And then, inserting both of the
time-dependent matrix x, y,z;tb and the actual displacement matrix tU in relation
(1.28), we can compute the actual strain matrix x, y,z;tε , which, in view of the gener-
alized Hooke’s law (1.9),
x, y,z;t x, y,z x, y,z;t σ κ ε , (1.9)
leads to the computation of the actual stress matrix x, y,z;tσ and the safe proportion-
ing of the structural elements and its components.
However, there is a core question on the realization of the above-suggested correction:
How can the correction factors x, y,z;ta and x, y,z;tb be computed?
In what follows, an iteration method is developed for the unified computation of the

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
139
correction factors x, y,z;ta , x, y,z;tb and the related matrix parameters Δ tM ,
tC , tD , tK , tP of an elastic continuum together with the actual displacement
matrix tU , the actual strain matrix x, y,z;tε and the actual stress matrix x, y,z;tσ
of the elastic continuum.
6.2. COMPUTATION OF THE ACTUAL ELASTIC RESPONSE
6.2.1. Theoretical basis of the computation
If we have an initial rough estimate of the displacement matrix tU , we can conclude
an initial rough estimate of the strain matrix x, y,z;tε of the elastic continuum by ap-
plying the static classical relation (1.2).
Using the estimate of the strain matrix x, y,z;tε as input in the generalized Hooke’s
law (1.9), we can compute the corresponding stress matrix x, y,z;tσ and derive the
stress derivatives xx yx zxσ x , τ y , τ z , . These stress derivatives constitute the
internal body forces of the continuum and together with the external body forces are re-
sponsible for the acceleration, and hence, for the motion, of the continuum, as described
by the differential equations of motion of the arbitrary point x, y,z , viz.
yxxx zxx
xy yy zy
y
yzxz zzz
τ x, y, z;tσ x, y, z;t τ x, y, z;tX x, y,z;t ρ u x, y,z;t
x y z
τ x, y, z;t σ x, y, z;t τ x, y, z;tY x, y,z;t ρ u x, y,z;t
x y z
τ x, y, z;tτ x, y, z;t σ x, y, z;tZ x, y,z;t ρ u x, y,z;t
x y z
(6.1)
where X x, y,z;t , Y x, y,z;t , Z x, y,z;t stands for the external body forces along
the axes x,y,z , respectively,
x y zu x, y,z;t , u x, y,z;t , u x, y,z;t stand for the accelerations,
and ρ stands for the mass density of the continuum.

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
140
Thus, for given external body forces X x, y,z;t , Y x, y,z;t , Z x, y,z;t , we can di-
rectly calculate the accelerations x y zu x, y,z;t , u x, y,z;t , u x, y,z;t from equations
(6.1). And then, integrating the accelerations with respect to time t , we can get esti-
mates of the displacements x y zu x, y,z;t , u x, y,z;t , u x, y,z;t , thereby getting an
estimate of their matrix x, y,z;tu , as follows
0 0
0 0
0 0
d d + 0 0
d d + 0 0
d d + 0
t τ
x x x x
t τ
y y y y
t τ
z z z
ˆ ˆu x, y,z;t u x, y, z; τ τ τ t u x, y, z;t u x, y, z;t
ˆ ˆu x, y,z;t u x, y, z; τ τ τ t u x, y, z;t u x, y, z;t
ˆ ˆu x, y,z;t u x, y, z; τ τ τ t u x, y, z;t u
0z x, y, z;t
(6.2)
where τ , τ stand for integrand variables of the time t ,
0xu x,y,z;t , 0yu x, y,z;t , 0zu x, y,z;t stand for initial displacements,
0xu x,y,z;t , 0yu x, y,z;t , 0zu x, y,z;t stand for initial velocities.
On account of the above estimates of x y zu x, y,z;t , u x, y,z;t , u x, y,z;t , the corre-
sponding displacement matrix tU can readily be determined.
It is emphasized that the above displacements x y zu x, y,z;t , u x, y,z;t , u x, y,z;t ,
their matrix x, y,z;tu , the resulting displacement matrix tU , as well as the initial es-
timate of the strain matrix x, y,z;tε used for their computation correspond exactly to
each other, and not approximately as via the static classical relations (1.27) and (1.32).
Putting the above estimates of the matrix of displacements x, y,z;tu and the dis-
placement matrix tU in the correct relation (1.23) leads to an initial estimate of the
correction factor x, y,z;ta . Similarly, putting the above estimate of the displacement
matrix tU and the initial strain matrix x, y,z;tε in the correct relation (1.28) leads to
an initial estimate of the correction factor x, y,z;tb , which can also be derived from
differentiating the correction factor x, y,z;ta with respect to the coordinates x,y,z .

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
141
The drivation of the correction factors x, y,z;ta and x, y,z;tb via the correct rela-
tions (1.23) and (1.28) from known matrices x, y,z;tu , x, y,z;tε and tU is an in-
verse vibration problem [116]. We can appropriately formulate this inverse vibration
problem, so that it will become a well-posed problem with a unique solution, by intro-
ducing two diagonal matrices relating the correction factor x, y,z;ta to x, y,za and
the correction factor x, y,z;tb to x, y,zb as follows
1
2
3
0 0
0 0
0 0
r x, y,z;t
x, y,z;t r x, y,z;t x, y,z
r x, y,z;t
a
a
a
a a , (6.3)
1
2
6
0 0
0 0
0 0 0
0 0 0
0 0 0
0 0
r x, y,z;t . . .
r x, y, z;t . . .
. . .x, y, z;t x, y, z
. . .
. . .
. . . r x, y, z;t
b
b
b
b b , (6.4)
with ir x, y,z;ta for 1 2 3i , , and jr x, y,z;tb for 1 2 3 4 5 6j , , , , , constituting sin-
gle-valued functions of the space coordinates x,y,z and the time t . Equations (6.3) and
(6.4) allow the direct computation of the 3 values ir x, y,z;ta and the 6 values
jr x, y,z;tb , and hence, the correction factors x, y,z;ta and x, y,z;tb , by means
of the correct relations (1.23) and (1.28), the estimates of x, y,z;tu , x, y,z;tε , tU
and the known classical matrices x, y,za , x, y,zb .
Introducing the estimates of x, y,z;ta and x, y,z;tb in the matrix equations (1.42)
leads to initial estimates of the matrices Δ tM , tC , tD , tK and tP .
Setting the above-estimated matrices Δ tM , tC , tD , tK and tP in the ma-
trix differential equation of motion (1.41) and solving, we calculate a new estimate of
the displacement matrix tU , and inserting it together with the above estimated correc-
tion factor x, y,z;tb in the correct relation (1.28), we get a new estimate of the strain
matrix x, y,z;tε . And then, repeating the steps of the above procedure following the

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
142
initial rough estimate of the strain matrix x, y,z;tε , we conclude new estimates of the
matrix of displacements x, y,z;tu , the displacement matrix tU , the correction fac-
tors x, y,z;ta and x, y,z;tb and the matrix parameters Δ tM , tC , tD ,
tK and tP of the matrix equation of motion (1.41). And so on.
This iterative computation procedure closes when the new estimate of the displacement
matrix tU does not differ substantially from the previous one.
It is worth noting that an initial rough estimate of the actual displacement matrix tU ,
for calculating an initial rough estimate of the strain matrix x, y,z;tε , can be obtained
by solving the matrix differential equation of undamped motion
t t t M U K U P , (6.5)
with M , K and tP defined by the corresponding matrix equations (1.42).
6.2.2. Summarizing the steps of the computation
The above iterative computation procedure leads to a reliable unified estimation of the
actual magnitudes of the correction factors x, y,z;ta and x, y,z;tb , the matrices
Δ tM , tC , tD , tK and tP , the displacement matrix tU , the strain matrix
x, y,z;tε and the stress matrix x, y,z;tσ of an elastic structure, without recourse to
any arbitrary data for damping ratios.
The computation steps can be summarized as follows
Step 1: Solving the equation of undamped motion (6.5) for the actual loading tP , we
can compute an initial rough estimate of the actual displacement matrix tU
with the aim to use it as input in a relationship between tU and the strain ma-
trix x, y,z;tε for obtaining an initial rough estimate of x, y,z;tε .
Step 2: We insert the above initial rough estimate of displacement matrix tU in the

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
143
arbitrary classical relation (1.32),
x, y,z;t x, y,z t ε b U , (1.32)
with the time-independent matrix coefficient x,y,zb evaluated according to
the classical finite element methods [20], [95]-[106], and compute an initial
rough estimate of the strain matrix x, y,z;tε .
Step 3: Introducing the above estimate of the strain matrix x, y,z;tε into the general-
ized Hooke’s law (1.9),
x, y,z;t x, y,z x, y,z;t σ κ ε , (1.9)
we can calculate an estimate of the stress matrix x, y,z;tσ at every point.
Step 4: We differentiate the stress components xx yy zz xy yz xzσ ,σ ,σ ,τ ,τ ,τ of the above es-
timate of the stress matrix x, y,z;tσ with respect to x, y, z , and get estimates
of the stress derivatives xx yx zxσ x , τ y , τ z , at every point of a con-
tinuum, whether elastic or not.
Step 5: We set the above estimates of stress derivatives xx yx zxσ x , τ y , τ z ,
together with the given magnitudes of the external body forces X ,Y ,Z in the
classical differential equations of motion (6.1), and get estimates of the accel-
erations x y zu x, y,z;t , u x, y,z;t , u x, y,z;t . at every point of a continuum,
whether elastic or not.
Step 6: By integrating the above accelerations x y zu x, y,z;t , u x, y,z;t , u x, y,z;t
with respect to time t , in accordance with formulas (6.2), we can compute the
displacements x y zu x, y,z;t , u x, y,z;t , u x, y,z;t , and hence, their matrix
x, y,z;tu at every point of a continuum, whether elastic or not, and a new es-
timate of the displacement matrix tU .

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
144
Step 7: Putting the above new estimates of the matrix x, y,z;tu and the displacement
matrix tU in the correct relation (1.23),
x, y,z;t x, y,z x, y,z;t t u a a U . (1.23)
with x, y,za having a known magnitude as derived by classical analysis [20],
[95]-[106], we obtain an initial estimate of the correction factor x, y,z;ta by
using its formulation (6.3) as a multiple of x, y,za .
Step 8: Putting the above new estimate of the strain matrix x, y,z;tε and the initially
estimated displacement matrix tU in the correct relation (1.28),
x, y,z;t x, y,z x, y,z;t t ε b b U , (1.28)
with x,y,zb having a known magnitude as derived by classical analysis [20],
[95]-[106], we obtain an initial estimate of the correction factor x, y,z;tb by
using its formulation (6.4) as a multiple of x,y,zb .
Step 9: Setting the above (derived from steps 7 and 8) estimates of the correction fac-
tors x, y,z;ta and x, y,z;tb in equation (1.42), we calculate an initial es-
timate of the matrices Δ tM , tC , tD , tK and tP .
Step 10: Inserting the above-estimated magnitude of the matrix parameters Δ tM ,
tC , tK and tP in the matrix equation of motion (1.41),
Δ t t t t t t t t M M U C U K K D U P , (1.41)
and solving, we compute a new estimate of the displacement matrix tU .
Step 11: Putting the above new estimate of tU and the estimate of x, y,z;tb de-
rived from step 8 in the correct relation (1.28), we get a new estimate of the

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
145
strain matrix x, y,z;tε .
Step 12: We repeat steps 3 up to 11 and so on. The iterative computation procedure
closes when the new estimate of the displacement matrix tU does not differ
substantially from the previous one.
6.2.3. The computation in practice
A major point of difficulty for applying the above computation procedure in practice is
the evaluation of the displacements x y zu x, y,z;t , u x, y,z;t , u x, y,z;t and the cor-
rection factors x, y,z;ta and x, y,z;tb as continuous functions of both the space
coordinates x,y,z and the time t and the evaluation of the matrix parameters Δ tM ,
tC , tD , tK and tP defined by equations (1.41) as continuous functions of the
time t . These evaluations actually imply an infinite number of calculations, which can-
not lead to a practical result. To face this difficulty, the above evaluations in continuous
terms may be replaced with evaluations in discrete terms, that is, we can substitute finite
sets of representative discrete points for the continuum that fills the space between the
discrete points contributing to the displacement matrix tU and for the continuous
time, thereby computing numerically.
Even so, the computation may still be exceptionally tedious, which can lead us to con-
fine it to the frame sketched in par. 6.4.2.
6.3. COMPUTATION OF EQUIVALENT VISCOUS DAMPING MATRIX
The equivalent viscous damping matrix eq tC of the elastic continuous structure can
be computed by means of equation (1.45),
Δeq t t t t t t t t t C U K D U C U M U , (1.45)
after introducing the final estimates of the displacement matrix tU , the velocity ma-

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
146
trix tU and the acceleration matrix tU , as derived from the displacement matrix
tU , and the final estimate of the matrices Δ tM , tD , tC , tK .
Indeed, if the proportion of the displacement matrix tU to the velocity matrix tU is
given the form
t t t U Ψ U , (6.6)
with tΨ standing for a diagonal matrix consisting of the ratios between the corre-
sponding elements of the matrices tU and tU , then the acceleration matrix tU
can be expressed as below
T Tt t t t t
U Ψ Ψ Ψ U (6.7)
and inserting in equation (1.45), the equivalent viscous damping matrix eq tC can be
computed as follows
ΔT T
eq t t t t t t t t t
C K D Ψ C M Ψ Ψ Ψ . (6.8)
6.4. INTERNAL DAMPING AND STRUCTURAL DESIGN
6.4.1. Basics of elastoplastic response computation
Equations (1.23) and (1.28) describing the correct relationships of the displacement ma-
trix tU to the matrix of displacements x, y,z;tu and to the strain matrix x, y,z;tε ,
respectively, can reliably apply to the dynamical behaviour of any continuum, whether
elastic or not. Moreover, the differential equations of the point motion (6.1) are valid ir-
respective of the elastic or plastic behaviour of a structure; for Newton’s second axiom
applies to both cases. Hence, the theoretical basis for deriving new estimates of the dis-
placement matrix tU and the strain matrix x, y,z;tε from an initial rough estimate
of the strain matrix x, y,z;tε , as detailed in par. 6.2.1 and 6.2.2, will also hold true for
the non-elastic behaviour of a continuum, provided that the generalized Hooke’s law

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
147
(1.9) will be replaced with an appropriate stress-strain law of elastoplastic behaviour.
Specifically, a replacement of the generalized Hooke’s law (1.9) with an elastoplastic
stress-strain law will introduce a strain-dependent factor ( )x, y,z;tκ ε as an addi-
tional factor to the elastic contant matrix x,y,zκ , so that the proportion between the
strain matrix x, y,z;tε and the stress matrix x, y,z;tσ will become equal to
( )x, y,z;t x, y,z x, y,z;t x, y,z;t σ κ κ ε ε . (6.9)
In this case, the principle of virtual work (1.33), as the energy-equivalent of Newton’s
second axiom, will remain valid, with no changes of equations (1.39) and (1.40) for the
virtual variations W and dT
VV u u . Only equation (1.38) for the virtual vari-
ation inU will change to
δ dT Tin
VU V U U b κ b
Δ Δ ΔT T
V
b κ + κ b b κ + κ b b , (6.10)
which implies the following modification of the stiffness fluctuation matrix tK
Δ Δ Δ dT T
Vt V
K b κ + κ b b κ + κ b b , (6.11)
while all the other equations (1.42) for M , Δ tM , tC , tD , K and tP , as well as
the matrix equation of motion (1.41), remain the same.
It is worth noting that the use of an initial rough estimate of the strain matrix x, y,z;tε
as the basic input of the computation procedure directly leads to an estimate of the
strain-dependent factor x, y,z;tκ ε . Accordingly, the estimate of x, y,z;tκ ε
will together with the estimates of x, y,z;ta and x, y,z;tb be inserted in the
above-modified equations (1.42) and lead to initial estimates of the matrices Δ tM ,
tC , tD , tK and tP , thereby modifying only step 9 of the computation in par.
6.2.2 with all the other steps of the computation remaining the same.
Within this frame, we can apply the theoretical basis of the structural computation ex-

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
148
posed in section 6.2 to improve the structural analysis and design for structures subject
to a stress-strain law of elastoplastic behaviour.
6.4.2. Improvement in the current structural design practice
In Chapter 1, par. 1.4.5, we have realized the insufficiency of the stress and strain
evaluation in the current structural design due to the inconsistency of internal damping
with the static classical relation (1.27) and (1.32) used for deriving the strain matrix
x, y,z;tε from the displacement matrix tU . In this paragraph, a remedy for this in-
sufficiency with an improvement of the current structural design is suggested.
In the current structural design practice, the dynamic problem of a structure is mathe-
matically modelled by the simplified matrix differential equation of damped motion
eqt t t t M U C U K U P , (6.12)
with eq tC U representing the actual internal damping forces and tP representing
all external body forces, surface tractions and externally applied damping loads. Then,
the displacement matrix tU obtained from solving equation (6.12) is the actual one.
In this case, the aim is to compute the corresponding actual strain matrix x, y,z;tε .
To this goal, we put the actual displacement matrix tU in the arbitrary classical rela-
tion (1.32) and find an initial rough estimate of the actual strain matrix x, y,z;tε ,
which, following the computation procedure detailed in par. 6.2.1 and steps 2 up to 6 of
par. 6.2.2, implies an virtual estimate of the displacement matrix tU correctly corre-
sponding with the above estimate of the strain matrix x, y,z;tε .
Putting this virtual estimate of the displacement matrix tU together with the initial
rough estimate of the strain matrix x, y,z;tε in the correct relation (1.28) results in an
initial estimate of the correction factor x, y,z;tb . Setting this correction factor
x, y,z;tb and the actual displacement matrix tU in the correct relation (1.28)
yields a new estimate of the actual strain matrix x, y,z;tε , and following the relevant

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
149
computation procedure of par. 6.2.1 or steps 2 up to 6 of par. 6.2.2, we get a new virtual
estimate of the displacement matrix tU . Inserting these new estimates of the strain
matrix x, y,z;tε and the displacement matrix tU in the correct relation (1.28) results
in a new estimate of the correction factor x, y,z;tb . And so on.
This iterative computation procedure closes when the new estimate of the actual strain
matrix x, y,z;tε that corresponds with the actual displacement matrix tU obtained
from solving equation (6.12) does not differ substantially from the previous one.
On the base of the above final estimate of the actual strain matrix x, y,z;tε and a
given stress-strain law for the dynamic behaviour, we can reliably estimate the actual
stress matrix x, y,z;tσ , thereby improving the current structural design practice.
The above-suggested simplified approach differs from that detailed in par. 6.2 only in
bypassing the iterative computation procedure for estimating the correction factor
x, y,z;ta , the matrix parameters Δ tM , tC , tD , tK and tP , and the corre-
sponding solution of the matrix differential equation of motion (1.41) for each estima-
tion of the matrix parametrs. The simplification consists in making use of only the ma-
trix differential equation of motion (6.12) for given matrix parameters M , eqC , K and
tP , which implies a unique solution in the displacement matrix tU .
6.5. CONCLUDING REMARKS
An iterative computation procedure for the actual displacement matrix tU , the actual
strain matrix x, y,z;tε and the actual stress matrix x, y,z;tσ of an elastic continuous
structure has been suggested in this chapter. The suggested procedure is founded on the
computation of the matrix correction factors x, y,z;ta and x, y,z;tb that should
be added to the classical proportionality matrix coefficients x, y,za and x, y,zb , re-
spectively, for defining the actual proportions between the displacement matrix tU
and either of the matrix of displacements x,y,z;tu and the strain matrix x, y,z;tε .
The computation of the matrix correction factors x, y,z;ta and x, y,z;tb allows
the computation of the internal damping force matrices t t K U , t tC U and

Chapter 6: Computation of Internal Damping and Actual Response in Elastic Structures
150
Δ t tM U , which added to the classical matrix of internal forces t tK U leads to
the matrix equation of damped motion of an elastic structure without recourse to any ar-
bitrary damping matrix eq tC . On the other hand, the computation of the matrix cor-
rection factors x, y,z;ta and x, y,z;tb and the actual displacement matrix tU
allows the estimation of the equivalent viscous damping matrix eq tC quite theoreti-
cally, without recourse to any experimental data for damping ratios.
Besides, based on the same evaluation of the matrix correction factor x, y,z;tb , an
improvement of structural design is offered, so that it will take into account the influ-
ence of damping on the derivation of the actual strain matrix x, y,z;tε from the actual
displacement matrix tU , which the current structural design neglects. By this im-
provement, the actual strain matrix x, y,z;tε , and hence, the actual stress matrix
x, y,z;tσ after using a stress-strain law, can be derived from the actual magnitude of
the displacement matrix tU of a structure, whether elastic or not.

151
CHAPTER 7
CONCLUSIONS AND
A MATHEMATICAL IMPLICATION
7.1. CONCLUSIONS
The research presented in this thesis concludes the nonconservative nature of the inter-
nal stresses developed in any continuum, whether elastic or not, and focuses on the phe-
nomenon of internal damping within the classical frame of elasticity and its basic con-
sequences for structural analysis and design. This conclusion is sufficient for overturn-
ing the conventional view that a discrepancy exists between the internal damping ob-
served in the elastic bodies and the continuum formulation of the generalized Hooke’s
law, and hence, for restoring the agreement of the law with observation.
The above core point of the research is mainly developed in Chapter 2, while Chapter 1
constitutes a general introduction to all important topics of the thesis with emphasis in
the matrix approach to structural analysis, and also, includes a literature review. Chap-
ter 3 examines the nonconservative nature of discrete elasticity in comparison with the
continuum elasticity of Chapter 2, and concludes that a damping term must be included
in the discrete formulation of Hooke’s law to assure its equivalence with the continuum
formulation of the generalized Hooke’s law. Chapters 4 and 5 get an insight into the ar-
bitrary assumptions used in classical elasticity and their role as a veil hiding the real
nonconservative nature of elasticity. Chapter 6 suggests an iterative computation pro-
cedure for theoretically determining the internal damping of an elastic continuous struc-
ture and its actual response, as well as an improvement of the current structural design
regarding the derivation of the actual strain matrix from the actual displacement matrix
of a continuous structure, whether elastic or not.
The conclusions of the research can be summarized as follows:

Chapter 7: Conclusions and a Mathematical Implication
152
1. The internal stresses developed during the dynamic deformation of any continuum,
whether elastic or not, are nonconservative, which means that the internal stresses de-
veloped in any dynamically excited continuum, whether elastic or not, include damping
(i.e. dissipative) components. This conclusion comes in full conformity with the elastic
hysteresis or internal damping actually observed, and overturns the classical view that
on account of the generalized Hooke’s law, the elastic continua cannot possess hystere-
sis loops or internal damping. In fact, only the total work of the elastic stress compo-
nents that are in balance at every infinitesimal element equals the strain energy, thereby
being a single-valued function of only the displacements, which indicates that these
elastic stress components are conservative. On the contrary, the work of the unbalanced
elastic stress components, as equal to the kinetic energy done by the spatial derivatives
of stresses, cannot be a single-valued function of only the displacements, which makes
these elastic stress components be nonconservative, and hence, responsible for damping.
In short, the total internal stresses in an elastic continuum are nonconservative, and can
be conservative for only the ideal case of static (i.e. motionless) deformation.
2. For the case of dynamic deformation of an elastic continuum, what led to the classical
view of conservative total internal stresses are two arbitrary assumptions imposed on
the Fourier series representation of the deformation of the continuum. The two arbitrary
assumptions are equivalent to each other and state that 1) differentiating the integral
representation of a coefficient of the Fourier series equals differentiating its integrand,
and 2) differentiating the Fourier series equals differentiating its terms.
These arbitrary assumptions actually constitute arbitrary limitations to the derivation of
the general solution to the elastodynamic continuum problem that exclude damping.
Removing the arbitrary assumptions leads to a general solution of damped character.
3. The hysteretic phenomena observed in all cyclically loaded elastic bodies even under
slow-rate loading conditions are classically taken for a disagreement with the experi-
ment and an indication of a defect in the generalized Hooke’s law. Thus, the viscoelas-
tic modification of the law has classically been suggested to remedy its inadequacy and
explain the hysteretic phenomena of structures in terms of internal (structural) damping.
However, proving that the generalized Hooke’s law of elastic continua under dynamic
conditions refers to nonconservative total internal stresses explains the internal damping
and the elastic hysteresis sufficiently. And hence, the classical modification of the gen-
eralized Hooke’s law to account for damping actually constitutes a superfluous attempt.

Chapter 7: Conclusions and a Mathematical Implication
153
On the other hand, the discrete equivalent of the generalized (i.e. the continuum formu-
lation of) Hooke’s law proves to include a damping component, which indicates that the
discrete viscoelastic model should actually be the discrete counterpart of the generalized
Hooke’s law. In contrast, the original discrete formulation of Hooke’s law represents
conservative behaviour that cannot be elastic, since the related discrete system after re-
moving the loads must undergo an undamped (and hence, everlasting) free vibration,
thereby retaining deformation forever, which by definition contradicts elastic behaviour.
4. With reference to the matrix structural analysis of an elastic continuous system, what
leads to the classical view of conservative internal stresses is the arbitrary assumption
that the proportion of the displacement matrix of the system to either of the strain matrix
and the matrix of displacements at a point of the system depends only on the position of
the point. Actually, this holds true for only static (i.e. motionless) deformation. For
dynamic deformation, the proportion of the displacement matrix of the system to either
of the strain matrix and the matrix of displacements at a point of the system also de-
pends on the loading history, or briefly, on the time.
Specifically speaking, the correct matrix approach to the dynamics of an elastic con-
tinuous system is founded on three principles independent of each other:
The generalized Hooke’s law as a time-independent proportionality between
stresses and strains at the same point of the system.
The principle of virtual work as the energy formulation of Newton’s 2nd axiom.
The actual proportion developed between the displacement matrix of the system
and the strain matrix at a point of the system, during a dynamic deformation of
the system, depends on both the position of the point and the time.
The only difference from the classical matrix approach consists in the third principle:
The proportion of the displacement matrix of the system to either of the strain matrix
and the matrix of displacements at a point is classically taken for time-independent.
Exactly the third principle is responsible for the development of complementary internal
elastic forces and complementary inertia forces that are functioning as damping forces.
Specifically, the column matrix of the internal elastic forces comprises a conservative
component equal to a constant stiffness matrix times the displacement matrix of the sys-
tem and a nonconservative (damping) component equal to a time-dependent stiffness
matrix times the displacement matrix of the system. This latter component can be
equally expressed as the product of a time-dependent equivalent viscous damping ma-
trix times the velocity matrix of the system. Thus, the matrix equation of motion of an

Chapter 7: Conclusions and a Mathematical Implication
154
elastic continuous system takes the classical mass-spring-damper formulation. The
nonconservative nature of the internal stresses and forces of an elastic continuous sys-
tem holds true even under slow-rate loading conditions, and constitutes what is called in
this thesis the damping effect of the generalized Hooke’s law. On the ground of this ef-
fect, all hysteretic phenomena can be explained within the range of the generalized
Hooke’s law without any recourse to modifications of the law.
5. The identification of the damping effect of the generalized Hooke’s law, that is to
say, realizing that the relation of the displacement matrix of an elastic continuous sys-
tem to either of the strain matrix and the matrix of displacements at a point of the sys-
tem is actually time-dependent, has a strong implication on structural design.
According to the current structural analysis and design of an elastic continuous system,
the following three main stages are used:
From the mass-spring-damper formulation of the matrix equation of motion of
the system the displacement matrix of the system can be evaluated.
A time-independent proportion of the displacement matrix of the system to the
strain matrix at a point of the system is assumed and the classical strains can be
derived from the evaluated displacement matrix.
By means of a stress-strain law (e.g. the generalized Hooke’s law), the classical
stresses are derived from the above strains. And then, comparing these stresses
with their allowable values, we are checking any design choice made.
To improve the above design process, the time-dependent proportion between the dis-
placement matrix of the system and the strain matrix at a point of the system has to be
determined. We can theoretically determine this time-dependent proportion, and hence,
the internal damping, the actual displacement matrix, strain matrix, stress matrix of an
elastic continuous system, by the iterative computation method presented in Chapter 6,
without recourse to any questionable experimental data for damping ratios.
Within the frame of the classical time-independent proportion between the displace-
ment matrix of the system and the strain matrix at a point of the system, the only we
can do to improve the reliability of the current approach to structural analysis and de-
sign is assuring its consistency. Specifically speaking, the second stage of the current
structural-design approach can only be consistent with zero damping conditions. And
hence, an improvement of the current approach can come from considering zero damp-
ing conditions for the matrix equation of motion, which results in the increase of the
displacement matrix through the first stage and the consequential increase of the classi-

Chapter 7: Conclusions and a Mathematical Implication
155
cal strains and stresses through the next two stages. On this base therefore, only zero
damping conditions can comply with the current approach, thereby offering a practical
counterbalance to the neglect of the actual time-dependent character of the proportion
between strains and the displacement matrix of the elastic structures.
6. The stresses and strains involved in the generalized Hooke’s law by definition refer to
one and the same point (i.e. an infinitesimal element) of an elastic continuum, which
implies that the law is equally valid for either static or dynamic conditions. On the base
of its point reference, the generalized Hooke’s law is consistent with the hysteresis loop
appearing in the cyclic loading tests. Indeed, a hysteresis loop is deduced from experi-
ments with finite specimen and does not relate elastic stresses and strains at the same
point. Instead, it relates, through a time-dependent proportion, the elastic stress applied
to the free ends of the test specimen and the mean strain all over the length of the spec-
imen. This proportion can be approximately given the form of the elastic-viscous dis-
crete model, which actually complies with the continuum formulation of the generalized
Hooke’s law for dynamic conditions. In short, the hysteretic phenomena of the elastic
continua are damping effects of the generalized Hooke’s law and by no means indicate
any defect in the law, notwithstanding conventional wisdom.
7.2. A MATHEMATICAL IMPLICATION
From the analysis developed in Chapters 2, 4 and 5 a serious mathematical implication
follows. The classical method of separation of variables, as conventionally used for de-
termining the general solution to a partial differential equation of motion, can be reliable
only on the condition that the accelerations included in the equation are continuous with
respect to time. Otherwise, we can conclude only an arbitrary particular solution such
as the undamped solution to the elastodynamic continuum problem. This is due to the
fact that without the above continuity, the underlying classical assumptions of the term-
by-term differentiability of the Fourier series and the integrand differentiability of the
integral representation of the relevant Fourier coefficients become quite arbitrary limita-
tions to the solution sought. In this case, deriving the really general solution of the par-
tial differential equation of motion requires that the arbitrary limitations be removed.

156
APPENDIX
MY PAPER “THE DYNAMICS OF CONTINUOUS
SYSTEMS CRITICIZED” IN FURTHER DETAILS
A.1. GENERAL
My paper of 1996 entitled “The Dynamics of Continuous Systems Criticized” [78]
showed in a simple way that there is a contradiction in the continuum-field application
of Bernoulli’s transformation (method of separation of variables) to the dynamics of an
elastic column subject to an external force at its free end. The contradiction consists in
the arbitrary classical assumption that the infinite series representation of the dynamic
response of an elastic continuous system accomplished by Bernoulli’s transformation
can be differentiated term-by-term within the theoretical frame of the generalized
Hooke’s law. Actually, this arbitrary assumption, which is responsible for the classical
view of the undamped character of the dynamic response of an elastic continuous sys-
tem, does not possess general validity. Moreover, beyond the classical assumption of
the term-by-term differentiation of the infinite series involved in the continuous-field
approach to the dynamics of an elastic continuous system, the generalized Hooke’s law
implies internal damping notwithstanding conventional wisdom.
In a lot of instances, the attempts to convey new ideas across academics pointed out the
possibility that even the reasoning of a simple analysis may not be clear enough and ad-
ditional details, initially considered as self-evident, must be subsequently discussed and
elucidated. On this base therefore, additional details for my published paper of 1996 are
provided in this appendix so that they will make quite clear both the reasoning of the
paper and its connection to the research exposed in my PhD thesis.

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
157
A.2. THE PARTIAL DIFFERENTIAL EQUATION OF MOTION
The continuum model of a uniform elastic column used in my published paper of 1996
[78] has been sketched in the following Fig. A.1
Fig. A.1: Continuum model of a uniform elastic column
The symbols used in Fig. A.1 and also in the ensuing analysis are specified as below
x stands for the level variable that refers to the initial state of static equilibrium
of the elastic column. By definition, 0x corresponds to the fixed end and x L corre-
sponds to the free end of the column, with L standing for the initial at-rest length of the
column.
t stands for the time variable. By definition, 0t corresponds to the beginning
of the dynamic excitation of the elastic column.
P t stands for the time-varying axial external force imposed on the elastic col-
umn, at its free end.
N x,t stands for the internal elastic axial force developed at the level z of the
elastic column, at the time moment t.
A stands for the uniform cross-sectional area of the elastic column.
Due to the fact that the dynamic loading P t imposed on the elastic column is concen-
trated at its free end x L , the partial differential equation of motion of the elastic col-
0
x
x dx
tP
d
N x,tN x,t x
x
N x,t
x=0
x=L

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
158
umn continuum as derived from Newton’s second axiom and the generalized Hooke’s
law is not directly related to the dynamic loading, that is,
E
u x,t u x,t
, (A.2.1)
where u x,t , E and stand for the displacement response of the elastic column at its
level x and at time t , its uniform modulus of elasticity (Young’s modulus) and its uni-
form mass density, respectively.
Dots and primes over functions [i.e. u x,t and u x,t ] stand for differentiation with
reference to the time t and to the level x , respectively.
Indeed, according to Newton's second axiom as applied to the dynamics of an infini-
tesimal length of the elastic column at its level x , it is valid for the internal elastic axial
force N x,t of the column (see Fig. A.1)
N x,tA u x,t
x
. (A.2.2)
On the other hand, the generalized Hooke's law, that is, the linear elastic relationship be-
tween the stresses and the strains at the same point [2]-[10], [4 p.33], [5 p.58], defines
the internal elastic axial force N x,t as
N x,t E A u x,t , (A.2.3)
which yields
N x,tE A u x,t
x
(A.2.4)
and combined with equation (A.2.2) results in the partial differential equation (A.2.1).
It is assumed that the elastic column continuum was at rest before subjected to the dy-
namic loading P t , which means zero initial conditions

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
159
0 0 0u x, u x, . (A.2.5)
The influence of the dynamic loading P t on the dynamics of the elastic column is ac-
counted for through the boundary stress condition
P t N L,t E A u L,t . (A.2.6)
A.3. THE CONTINUOUS-FIELD SOLUTION OF DISCRETE ORIGINATION
Applying the classical discrete (matrix) approach to the dynamics of the elastic column
paradigm considered in my paper of 1996, the elastic column’s response tU is de-
scribed by the matrix equation of either an undamped motion
t t t M U K U P (A.3.1)
or a damped motion
t t t t M U C U K U P , (A.3.2)
where tU stands for the displacement matrix of the column, that is, the column ma-
trix of the displacements of the column at its N discrete levels considered. It is worth
noting that by its very definition, the displacement matrix tU of the column satisfies
all the initial and boundary conditions of the dynamic problem under consideration.
M , K and C stand for the mass matrix, stiffness matrix and damping matrix,
respectively, of the elastic column.
tP stands for the matrix representation of the external force P t applied at
the free end of the column, which equals the column matrix 0 0 0T
P t .
The displacement matrix tU of the column may always be transformed into a column
matrix tq by means of an arbitrarily chosen square matrix Φ as follows

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
160
t t U Φ q . (A.3.3)
Taking into account that the square matrix Φ consists of N column matrices nφ and
the column matrix tq consists of N elements (displacements) nq t , the above self-
evident transformation may be equally rewritten as
1
N
n n
n
t q t
U φ , (A.3.4)
which is nothing but the discrete formulation of Bernoulli’s transformation.
The column matrices nφ are classically derived from the following equations
0 for =1,2,3,n n n ny t y t n M φ K φ , (A.3.5)
which after summing up for all =1,2,3,n result in
1 1
0N N
n n n n
n n
y t y t
M φ K φ . (A.3.6)
Equations (A.3.5) imply that the column matrices nφ in equation (A.3.6) are deter-
mined independently of each other, thereby being independent of each other.
Indeed, multiplying equation (A.3.5) by Tnφ yields
0T Tn n n n n ny t y t φ M φ φ K φ , (A.3.7)
or equally
2 20 with
Tn n
n n n n Tn n
y t y t
φ K φ
φ M φ, (A.3.8)
whose combination with equation (A.3.5) leads to the classical matrix eigenvector (or
eigenvalue) equation

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
161
2 0n n K M φ . (A.3.9)
The natural frequencies n are classically derived from the zero determinant
2 0ndet K M , (A.3.10)
which suffices for nonzero solutions nφ to equation (A.3.9).
Equations (A.3.9) and (A.3.10) and the definition of the natural frequencies n shown
in equation (A.3.8) assure that the column matrices nφ must be independent of each
other. Besides, the symmetry of the matrices M , K assures the orthogonality of the
column matrices nφ with respect to each one of these matrices. And hence, assuming
orthogonality of the column matrices nφ with respect to the matrix C for the case of
equation (A.3.2), we can uncouple the matrix equations (A.3.1) and (A.3.2) into N in-
dependent equations representing the motions of N independent single-degree-of-
freedom systems [27 pp.158-161]. As a consequence, the N generalized displacements
nq t are independent of each other.
According to the classical theory [27 pp.204-209], for an infinite number of degrees of
freedom (i.e. N ), the modal form (A.3.4) of the discrete (matrix) solution to the
dynamics of the elastic column can equally be put into the continuous formulation
1
n n
n
u x,t x q t
, (A.3.11)
thereby coinciding with the continuum solution u x,t to the partial differential equa-
tion of motion (A.2.1). Since the discrete solution (A.3.4) complies with all initial and
boundary conditions of the elastic column, its continuum counterpart formulation
(A.3.11) must also comply with all initial and boundary conditions of the elastic col-
umn, namely, equations (A.2.5) and (A.2.6). Moreover, the modes n x and the gen-
eralized displacements nq t of the continuum solution (A.3.11) must possess the same
properties as the corresponding magnitudes of the discrete solution (A.3.4) due to the
equivalence of the two solutions.

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
162
A.4. THE CLASSICAL CONTRADICTION
The classical approach to the dynamics of the elastic continuous systems is founded on
the assumption that the infinite series representation of the system response given by
Bernoulli’s transformation (A.3.11) can always be differentiated term-by-term, viz
1 1
d1 2
d
nn n n
n n
u x,t q tx q t x for , ,
t t t
, (A.4.1a)
1 1
d
d
nn n n
n n
u x,t xx q t q t for 1,2,
x x x
. (A.4.1b)
It is reasonable that the continuum formulation (A.3.11) of the discrete solution (A.3.4)
to the dynamics of the elastic column must satisfy the partial differential equation of
motion (A.2.1), which due to the term-by-term differentiation rules (A.4.1) results in
1 1
n n n n
n n
Ex q t x q t
. (A.4.2)
Since the normal modes n x , and hence, their derivatives n x , are independent of
each other by their determination via the discrete approach [cf par.A.3, eq.(A.3.6)-
eq.(A.3.10) and relevant note], the above equation must be equivalent to
n n n n
Ex q t x q t
(A.4.3)
or equally
n n 2
nn n
q t xEcons tan t
q t x
, (A.4.4)
which implies
2 0n n nq t q t . (A.4.5)

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
163
Evidently, from the at-rest (zero) initial conditions (A.2.5), the continuous-field solution
(A.3.11) and the term-by-term differentiation rule (A.4.1b) it follows
1 1
0 0 0n n n n
n n
x q x q
, (A.4.6)
and because of the mutual independence of the normal modes n x , which is due to
their discrete origination, equation (A.4.6) becomes equivalent to
0 0 0n n n nx q x q (A.4.7)
or equally
0 0 0n nq q . (A.4.8)
It is quite obvious that the solution of the homogeneous ordinary differential equation
(A.4.5) for the zero initial conditions (A.4.8) can only be zero
A 4 50
A 4 8n
. .q t
. .
. (A.4.9)
And hence, the continuum formulation (A.3.11) of the modal form (A.3.4) of the dis-
crete solution to the dynamics of the elastic column can only be zero, i.e.
0u x,t . (A.4.10)
However, the above outcome contradicts the action of any nonzero external force P t
because of the boundary stress condition (A.2.6). Here is the contradiction in the classi-
cal approach to the dynamics of the elastic column.
A.5. THE ROOT OF THE CLASSICAL CONTRADICTION
In view of the equivalence of the discrete (matrix) approach and the continuum ap-

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
164
proach to the dynamics of the elastic continuous systems, when the former is based on
an infinite number of degrees of freedom ( N in the relevant formulas), and the
self-evidence of the discrete formulation of Bernoulli’s transformation (A.3.4), the
above contradiction can only result from the term-by-term differentiation rules (A.4.1).
Indeed, if the term-by-term differentiation rules (A.4.1) are replaced by the general dif-
ferentiation rules
1
d1 2
d
nn t
n
u x,t q tx R x,t for ,
t t
(A.5.1a)
1
d1 2
d
nn x
n
u x,t xq t R x,t for ,
x x
(A.5.1b)
with tR x,t and xR x,t standing for inseparable differential remainder terms, then,
instead of the classical equation (A.4.2), we will obtain
1 1
n n t n n x
n n
E Ex q t R x,t x q t R x,t
. (A.5.2)
Evidently, the above equation does not lead to equations (A.4.3) and (A.4.5), and hence,
avoids the relevant contradiction (A.4.10). Thus, the classical assumption that the infi-
nite series representation of the dynamic response can be differentiated term-by-term
proves to be the root of the contradiction in the classical analysis.
It is worth noting that adopting the general differentiation rules (A.5.1) and following
the continuum approach to the dynamics of the elastic continuous systems, which in-
cludes a continuum approach to the definition of the natural modes n x , actually lead
to the damped response of the system.
A.6. CONCLUDING REMARKS
On the basis of the above evidence, the conclusion of my early criticism [78] that the
classical application of Bernoulli’s transformation to the dynamics of the elastic con-

Appendix: My Paper “The Dynamics of Continuous Systems Criticized” in More Detail
165
tinuous systems is contradictory seems to be well established. Furthermore, it has been
disclosed that the contradiction is a consequence of the classical assumption that the in-
finite series representation of the dynamic response can be differentiated term by term.
However, over this early criticism, notwithstanding its consistency, a reasonable dispute
could be settled: The contradiction of the term-by-term differentiation rules (A.4.1) has
been proved not for the normal modes n x classically derived by means of the con-
tinuous-field approach itself but for the continuous formulation of those derived by
means of the classical discrete (matrix) approach as applied to the case of an infinite
number of degrees of freedom. Here is the need for an analysis showing the contradic-
tion of the term-by-term differentiation rules within the frame of the classical continu-
ous-field approach alone. From this point of view, the analysis developed in Chapters 4
and 5 has met the real need for a thorough research on the theme.

166
PUBLICATIONS
Articles in International Journals
V. Nikitas, A. Nikitas and N. Nikitas (2009), Non-Conservative Nature of the Stresses
Developed in a Continuum, Journal of the Mechanical Behaviour of Materials, Vol. 19,
No 6, p. 393-406.
Congress & Conference Proceedings
V. Nikitas, A. Nikitas and N. Nikitas (2008), Bernoulli’s Transformation of the Re-
sponse of an Elastic Body and Damping, EURODYN 2008, 7th
European Conference on
Structural Dynamics, Southampton 2008, E12, p. 37.
V. Nikitas (1996), The Dynamics of Continuous Systems Criticized, 2nd Greek National
Congress on Computational Mechanics, Crete, Greece 1996, 653-658.
V. Nikitas (1996), The Magnitude of Ratio ξ=x/d as an Index for Optimum Design of
Flexural Strength of Reinforced Concrete, 12th
Greek-Cypriot National Congress on
Concrete, Lemessos, Cyprus 1996, Vol.3, pp. 157-168.

167
REFERENCES
[1] Kline M. (1972), Mathematical Thought from Ancient to Modern Times, Oxford
University Press, 502-522.
[2] Love A. E. (1944), A Treatise on the Mathematical Theory of Elasticity, 4th edi-
tion, Dover.
[3] Wang C-T (1953), Applied Elasticity, McGraw-Hill.
[4] Housner G & Vreeland T (1991), The Analysis of Stress and Deformation, 6th
printing, Macmillan.
[5] Sokolnikoff I. S. (1956), Mathematical Theory of Elasticity, 2nd edition,
McGraw-Hill, 1-90.
[6] Filonenko-Borodich M. (1965), Theory of Elasticity, Dover.
[7] Timoshenko S. P. and Goodier J. N. (1970), Theory of Elasticity, 3rd edition,
McGraw-Hill.
[8] Ugural A. C. and Fenster S. K. (1995), Advanced Strength and Applied Elastic-
ity, 3rd edition, Prentice-Hall.
[9] Rees D. W. (2000), Mechanics of Solids and Structures, Imperial College Press.
[10] Gordon J. E. (1978), Structures or Why Things Don’t Fall Down, Penguin
Books.
[11] Lord Rayleigh (1877), The Theory of Sound, McLellan (Dover Publications re-
print 1946), Vol.1.
[12] Hort W. (1910), Technische Schwingungslehre, Verlag von Julius Springer.
[13] Van Den Dungen M. H-F. (1928), Les Problemes Generaux de la Technique des
Vibrations, Gauthier-Villars.
[14] Timoshenko S. P. (1928), Vibration Problems in Engineering, Van Nostrand.
[15] Den Hartog J. P. (1932), Mechanical Vibration, McGraw-Hill.
[16] Myklestad N. O. (1944), Vibration Analysis, McGraw-Hill.
[17] Nowacki W. (1963), Dynamics of Elastic Systems, Chapman & Hall.
[18] Pestel E. & Leckie F. A. (1963), Matrix Methods in Elastomechanics, McGraw-
Hill.
[19] Biggs J. M. (1964), Introduction to Structural Dynamics, McGraw-Hill.

References
168
[20] Przemieniecki J. S. (1968), Theory of Matrix Structural Analysis, McGraw-Hill.
[21] Newmark N. M. and Rosenblueth E. (1971), Fundamental of Earthquake Engi-
neering, Prentice-Hall.
[22] Warburton G. B. (1976), The Dynamical Behaviour of Structures, 2nd edition,
Pergamon.
[23] Tse F. S., Morse I. E. and Hinkle R. T. (1978), Mechanical Vibrations Theory
and Applications, 2nd edition, Prentice Hall, 1-130, 253-295.
[24] Kalevras V. (1981), Lessons on Reinforced Concrete (in Greek), Vol.1, Ch. D,
Analysis and Design for Seismic Actions, Democritus University of Thrace
Press.
[25] Anastasiadis K. (1983), Dynamics of Structures (in Greek), Zitis Publisher.
[26] Polyakov S. V. (1985), Earthquake Resistant Structures, Mir Publishers.
[27] Meirovitch L. (1986), Elements of Vibration Analysis, 2nd edition, McGraw-
Hill.
[28] Irvine H. M. (1986), Structural Dynamics for the Practising Engineer, Allen &
Unwin.
[29] Coates R. C., Coutie M. G. and Kong F. K. (1988), Structural Analysis, 3rd edi-
tion, Chapman and Hall.
[30] Barbat A. H. and Canet J. M. (1989), Structural Response Computations in
Earthquake Engineering, Pineridge Press.
[31] Liolios A. (1989), Dynamics of Structures (in Greek), Democritus University of
Thrace Press.
[32] Weaver W. (JR), Timoshenko S. P. and Young D. H. (1990), Vibration Prob-
lems in Engineering, 5th edition, McGraw-Hill, 1-113, 363-505.
[33] Clough R. W. and Penzien J. (1993), Dynamics of Structures, 2nd edition,
McGraw-Hill, 33-71, 140-145, 365-423.
[34] Thomson W. T. (1993), Theory of Vibration, 4th edition, Stanley Thornes.
[35] Dimarogonas A. (1996), Vibration for Engineers, 2nd edition, Prentice Hall.
[36] Paz M. (1997), Structural Dynamics Theory and Computation, 4th edition,
Chapman & Hall, 3-156, 609-650.
[37] Chopra A. (2001), Dynamics of Structures: Theory and Applications to Earth-
quake Engineering, Prentice-Ηall, 3-151, 585-609.
[38] Karman T. and Biot M. A. (1940), Mathematical Methods in Engineering,
McGraw-Hill, 89-93, 260-405.

References
169
[39] Webster A. G. (1955), Partial Differential Equations of Mathematical Physics,
Dover.
[40] Lanczos Cornelius (1961), Linear Differential Operators, D. Van Nostrand (Do-
ver reprint), 330-336, 432-439, 454-468, 486-487.
[41] Greenspan D. (1961), Introduction to Partial Differential Equations, McGraw-
Hill.
[42] Garabedian P. R. (1964), Partial Differential Equations, John Wiley & Sons.
[43] Weinberger H. F. (1965), A First Course in Partial Differential Equations with
Complex Variables and Transform Methods, Blaisdel Publishing Company.
[44] Sokolnikoff I. S. and Redheffer R. M. (1966), Mathematics of Physics and Mod-
ern Engineering, 2nd edition, McGraw-Hill, 1-86, 435-526.
[45] Stephenson G. (1973), Mathematical Methods for Science Students, 2nd edition,
Longman, in particular 180-184, 254-271, 469-474.
[46] Stephenson G. and Radmore P. (1990), Advanced Mathematical Methods for
Engineering and Science Students, Cambridge University Press, 190-218.
[47] Gustafson K. E. (1980), Introduction to Partial differential Equation and Hilbert
Space Methods, John Wiley & Sons.
[48] Kaplan W. (1981), Advanced Mathematics for Engineers, Addison-Wesley, In
particular 127-177, 405-443.
[49] Farlow S. J. (1982), Partial Differential Equations for Scientists and Engineers,
John Wiley & Sons.
[50] Zauderer E. (1983), Partial Differential Equations of Applied Mathematics, John
Wiley and Sons.
[51] Tyn Myint-U with Lokenath Debnath (1987), Partial Differential Equations for
Scientists and Engineers, 3rd edition, Prentice-Hall, in particular 1-9, 137-168.
[52] Trim D. W. (1990), Applied Partial Differential Equations, PWS Publishing
Company.
[53] Strauss W. (1992), Partial Differential Equations, An Introduction, John Wiley
& Sons, 1-30, 82-143.
[54] McOwen R. C. (1996), Partial Differential Equations, Methods and Applica-
tions, Prentice-Hall.
[55] Riley K. F., Hobson M. P. and Bence S. J. (1998), Mathematical Methods for
Physics and Engineering, Cambridge University Press, 124-125, 501-599.
[56] Boltzmann L. (1874), Zur Theorie der Elastischen Nachwirkung, Sitzungsber.

References
170
Akad. Wiss. Wien, 70: 275-306.
[57] Meyer O. E. (1874), Theorie der Inneren Reibung, J. Reine Agnew. Math., 78:
108-119.
[58] Meyer O. E. (1874), Theorie der Elastischen Nachwirkung, Ann. Physik, 151:
108-119.
[59] Meyer O. E. (1874), Zusatz zu der Abhandlung, J. Reine Agnew. Math., 80: 315-
316.
[60] Duhem P. (1903), Sur la Viscosite en un Milieu Vitreux, C. R. Acad. Sci. Paris,
136: 281-283
[61] Duhem P. (1903), Sur les Equations du Mouvement et la Relation Supplemen-
taire au Sein d’ un Milieu Vitreux, C. R. Acad. Sci. Paris, 136: 343-345.
[62] Gross B. (1953), Mathematical Structure of the Theories of Viscoelasticity,
Hermann & Cie.
[63] Rivlin R. S. and Ericksen J. L. (1955), Stress-Deformation Relations for Iso-
tropic Materials, J. Rational Mech. Anal., 4: 232-425.
[64] Lee E. H. (1960), Viscoelastic Stress Analysis, Proc. First Symposium on Naval
Structural Mechanics, Pergamon Press.
[65] Colemann B. D. and Noll W. (1961), Foundations of Linear Viscoelasticity,
Rev. Mod. Phys., 33: 239-249.
[66] Gurtin M. E. and Sternberg E. (1962), On the Linear Theory of Viscoelasticity,
Arch. Ration. Mech. Anal., 11: 291-355.
[67] Gurtin M. E. and Herrera I. (1965), On Dissipation Inequalities and Linear Vis-
coelasticity, Quart. Appl. Math., 23: 235-245.
[68] Day W. A. (1971), Restrictions on Relaxation Functions in Linear Viscoelastic-
ity, Quart. J. Mech. Appl. Math., 24: 487-497.
[69] Wilkes N. S. (1978), Continuous Dependence and Instability in Linear Viscoe-
lasticity, J. de Mechanique, 17: 717-726.
[70] Kimball A. L. (1929), Vibration Including the Case of Solid Damping, Trans.
ASME, APM 51-52.
[71] Myklestand N. O. (1952), The Concept of Complex Damping, J. Appl. Mech.,
19: 284.
[72] Bishop R. E. (1955), The Treatment of Damping Forces in Vibration Theory, J.
Roy. Aeron. Soc., 59: 738.

References
171
[73] Lazan B. J. (1968), Damping of Materials and Members in Structural Mechan-
ics, 1st edition, Pergamon Press.
[74] Snowdon J. C. (1968), Vibration and Shock in Damped Mechanical Systems,
John Wiley & Sons.
[75] Nashif A. D., Jones D. I. G. and Henderson J. P. (1985), Vibration Damping,
John Wiley & Sons.
[76] Crandall S. H. (1970), The Role of Damping in Vibration Theory, J. Sound Vibr.,
11(1): 3-18.
[77] Scanlan R. H. (1970), Linear Damping Models and Causality in Vibration, J.
Sound Vibr., 13(4): 499-509.
[78] Nikitas V. (1996), The Dynamics of Continuous Systems Criticized, 2nd Greek
National Congress on Computational Mechanics, Crete, Greece 1996, 653-658.
[79] Nikitas V., Nikitas A. and Nikitas N. (2008), Bernoulli’s Transformation of the
Response of an Elastic Body and Damping, EURODYN 2008, 7th
European
Conference on Structural Dynamics, Southampton 2008, E12, p. 37.
[80] Nikitas V., Nikitas A. and Nikitas N. (2009), Non-Conservative Nature of the
Stresses Developed in a Continuum, Journal of the Mechanical Behaviour of
Materials, Vol. 19, No 6, p. 393-406.
[81] Armenakas A. E. (1988), Classical Structural Analysis, A Modern Approach,
McGraw-Hill.
[82] Sokolnikoff I. S. (1939), Advanced Calculus, first edition, McGraw-Hill.
[83] Piskunov N. S. (1977), Differential and Integral Calculus, 2nd edition, Mir Pub-
lishers.
[84] Bromwich T. J. (1908), An Introduction to the Theory of Infinite Series, Macmil-
lan and Co.
[85] Carslaw H. S. (1930), An Introduction to the Theory of Fourier's Series and In-
tegrals, 3rd edition, Macmillan and Co..
[86] Knopp K. (1951), Theory and Applications of Infinite Series, 2nd edition,
Blackie & Sons.
[87] Smirnoff V. I. (1964), A Course in Higher Mathematics (in five volumes), Per-

References
172
gamon Press, Vol. 1.
[88] Argyris J. H. (1960), Energy Theorems and Structural Analysis, Butterworth
Scientific Publications.
[89] Neal B. G. (1964), Structural Theorems and Applications, Pergamon.
[90] Tauchert T. R. (1974), Energy Principles in Structural Mechanics, Mc Graw-
Hill.
[91] Davies Glyn A. O. (1982), Virtual Work in Structural Analysis, John Wiley &
Sons.
[92] Kong F. K, Prentis J. M. and Charlton T. M. (1983, 1984), Principle of Virtual
Work for a General Deformable Body-A Simple Proof, Structural Engineer 61A:
Discussions, 62A: 67-70.
[93] Dym C. L. (1997), Structural Modelling and Analysis, Cambridge University
Press.
[94] Besseling J. F. (1963), The Complete Analogy Between the Matrix Equations
and the Continuous Field Equations of Structural Analysis, Intern. Symp. Digital
Techn. Appl. Aeron. Liege.
[95] Argyris J. H. (1965), Continua and Discontinua, Proc. Conf. Matrix Methods
Struct. Mech., Wright Patterson Air Force Base, Ohio.
[96] Argyris J. H. (1964), The Trodheim Lectures on the Matrix Theory of Structures,
John Wiley & Sons.
[97] Rockey K. C., Evans H. R., Griffiths D. W. and Nethercot D. A. (1975), The Fi-
nite Element Method, A Basic Introduction, CLS.
[98] Livesley R. K. (1975), Matrix Methods of Structural Analysis, Pergamon.
[99] Livesley R. K. (1983), Finite Elements: An Introduction for Engineers, Cam-
bridge University Press.
[100] Zienkiewicz O. C. (1977), The Finite Element Method, 3rd edition, Tata
McGraw-Hill.
[101] Allaire P. E. (1985), Basics of the Finite Element Solid Mechanics, Heat Trans-
fer and Fluid Mechanics, WCB Publishers.
[102] Krishnamoorthy C. S. (1987), Finite Element Analysis, Theory and Program-
ming, Tata McGraw-Hill.
[103] Fagan M. J. (1992), Finite Element Analysis, Theory and Practice, Longman.

References
173
[104] Bathe K-J. (1996), Finite Element Procedures, Prentice-Hall.
[105] Fenner R. T. (1996), Finite Element Methods for Engineers, Imperial College
Press.
[106] Ghali A. and Neville A. M. (1997), Structural Analysis, 4th edition, Spon.
[107] Desai C. S. and Kundu T. (2001), Introductory Finite Element Method, CRC
Press.
[108] Kimble T. W. B. & Berkshire F. H. (1996), Classical Mechanics, 4th edition,
Longman.
[109] Personal correspondence with Heriot-Watt University in 2006.
[110] Popov E. P. (1999), Engineering Mechanics of Solids, Prentice Hall.
[111] Goldstein H. (1980), Classical Mechanics, Addison-Wesley.
[112] Kaplan W. (1973), Advanced Calculus, 2nd edition, Addison-Wesley.
[113] Chandler D. (1987), Introduction to Modern Statistical Mechanics, Oxford Uni-
versity Press.
[114] Askar A. (1986), Lattice Dynamical Foundations of Continuum Theories, World
Scientific.
[115] Råde L. and Westergren B. (1998), Mathematics Handbook for Science and En-
gineering, 4th edition, Springer.
[116] Gladwell G. (1999), Inverse Finite Element Vibration Problems, Journal of
Sound and Vibration, 211(2), pp. 309-324.