ni - kaist.ac.kr€¦ · Pop-up obstacle Success ... Actual values @100 Hz. Steering Input Flow ....
87
1 ni.com
Transcript of ni - kaist.ac.kr€¦ · Pop-up obstacle Success ... Actual values @100 Hz. Steering Input Flow ....

1 ni.com

ni.com

ni.com
Empowering Future Engineering Innovators
Student Design Finalist Showcase

ni.com
3250 Submissions
25 Countries
3 Finalists

ni.com
EureCar, KAIST Self-Driving Car
Korea Advanced Institute of Science and Technology

ni.com
Unghui Lee EureCar, KAIST Self-Driving Car
Korea Advanced Institute of Science and Technology, KAIST

ni.com
EureCar, Self Driving Car
EureCar
DGPS Novatel OEMV-2 x 2
7 Laser Scanners Sick - LMS291 x2, Sick - LMS151 x2 Ibeo – LUX, Hokuyo – UTM-30LX x2
EureCar Turbo
GPS U-blox EVK-6T
Laser Scanner Velodyne HDL-32E

ni.com
EureCar, Self Driving Car
Vision Computer
Path PlannerComputer
Laser & Map Computer
Navigation Computer
ControlComputer
Version 1 Version 2
2 years
ComapactRIO

ni.com
EureCar turbo, Self Driving Car
5 Months

ni.com
Path Planner PC
Shared Variables
◀ Position, Vehicle info ▶ Velocity & Steer CMD.
CAN Communication Steering Controller
ECU
USB
RS-232 GPS
Global Positioning Timed Loop - Real Time Module
Brake Control Throttle Control PWM
Actuator Control Loop - PID and Fuzzy toolkit
E-STOP SW
Digital Input.
Auto/Manual Digital Input.
FGPA module
CompactRIO – Localization and Controller

ni.com
Path Planner PC – LabVIEW Front Panel
GPS Info.
Obstacles and Path Vehicle Status

ni.com
Path Planner PC – LabVIEW Front Panel

ni.com
Unified Map
Crosswalk, Traffic Lights Pedestrian, Toll Bar
Detection
Situation Awareness
Parking Line Detection
Obstacle Detection Car, cones (obstacles) Road Blocks, Lane
Laser Data Processing Desktop PC
C++
Navigation & Control NI CompactRIO
Path Planner Desktop PC Labview
Vision Processing Desktop PC
C++ Sensor Interface
Front View Camera Ethernet
Rear Down Camera Ethernet
Velodyne HDL-32e Ethernet
EureCar Turbo System configuration
Local Trajectory Re-planning
Driving Status Check high-level decision
making
Path tracker
New
Path
Vehicular status
Current path
Collision Point
Vehicular
Status
Path
Path Planner
Yaw rate, Wheel Speed Car Built in Senor, CAN
Localization
Position, Heading,
Vehicle Info.
Absolute location and
heading
Speed, Steering angle
GPS (Ublox) USB
Vehicle Control
Steering Speed
command
CompactRIO
Actuator
Throttle Pedal Control Motor
Brake Pedal Control Motor
Steering Wheel CAN
Shift Lever Control Motor

ni.com
Parking Lot Number Sign
Parking Area (Finish Point)
Start
Crosswalk
Pedestrian Detection
Crossbar
Detour Mission Result
Crosswalk detection Success
Traffic light Success
Complex obstacles Success (zero cone)
Pedestrian Detection Failure
Detour Success (zero cone)
Passing slow vehicle Success
Pop-up obstacle Success
Crossbar Detection Success
Parking Success
“Hyundai Challenge” Competition-at-a-glance (EureCar)

ni.com
“Hyundai Challenge” Competition (EureCar)
Speed [km/h]
Ave. 22.43
Max. 51.75
time 0:09:07

ni.com
EureCar Turbo

ni.com
EureCar Turbo

ni.com
EureCar Turbo

ni.com
Team EureCar, KAIST
Team Members : Unghui Lee, Jiwon Oh, Jiwon Jung, Seunghak Shin, Inwook Shim Jongwon Choi, Youngseop Jung, Kibaek Park, Minhyun Kim
Faculty Advisers: Hyunchul Shim, Inso Kweon, Seibum Choi

ni.com
Thank you
Q & A

ni.com
Sepios: Nautical Robot
Swiss Federal Institute of Technology in Zürich

22
STUDENT DESIGN SHOWCASE Pascal Buholzer & Fabio Dubois
August 4th 2014
Title

23 Outline
1. Introduction a. The Sepios Project b. Nature as Inspiration c. Goal & Vision
2. Design Process a. Early Stages b. Mechanical Design c. Electronics & Software
3. Achievements a. Omnidirectionality b. Attitude Control c. Collision Avoidance
4. Outlook
Presentation Outline

24 Introduction 1/4
Introduction

25
Introduction 1/4
www.polyball.ch
The Sepios Project

26
Introduction 1/4
… to the final robot
from the first draft…
The Sepios Project

27
Introduction 1/4
http://wall.alphacoders.com
Nature as Inspiration

28
Introduction 1/4 Cuttlefish Love by Michael McCue from http://vimeo.com/17280832

29
• Wide-stretching vortices
• Cavitation
• Hazardous
Introduction 1/4
www.nakashima.co.jp www.oceaneering.com
Current Technology

30
Introduction 1/4
Anup A. Sirgaonkar et al. [2008]
Undulating Fin Propulsion

31 Introduction 1/4
Our Goal
Proof of omnidirectional locomotion capabilities of a nautical robot with sepia inspired fins.

32 Design Process 2/4
Design Process 95 cm
70 cm
22.7 kg
1.8 km/h
37 motors
4700 parts
90 min

33
Brainstorming session, September 2013
Design Process 2/4
Brainstorming

34
Critical function prototyping
Servo load tests Proof of concept: LEGO prototype
Design Process 2/4
Prototyping and Testing

35
Base Unit Connection Board
Fin Case Powertrain
FIN
MEC
HA
NIC
S IN
TER
IOR
Design Process 2/4
Mechanical Design

36
Lowest Safety Coefficient > 1.5
5 2
1
3
4 6
Design Process 2/4
Dimensioning

37
X-Ring Sealing
Flat Sealing
Design Process 2/4
Sealing the Deal

38
POWER MANAGEMENT
AVR based self-designed connection board
HIGH-LEVEL COMPUTING
National Instruments myRIO
Design Process 2/4
Electronics and Software

39
Battery
myRIO
IMU
Connection Board
Pump Motor Driver
Distance Sensor
Pump Motor
Swimbladder
Laser
Camera
Ethernet Switch
Design Process 2/4
Base Unit

41
Implementation Overview (LabVIEW)
myRIO in Robot
• Variable Server
• Sensor Stream (100 Hz)
• Attitude Controller
Interface on PC
• Variable Client
• Indicators regularly updated
Calculations on PC
• Variable Client
• Kalman Filter (MathNode)

42
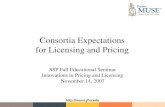
PeripheryInput
Input Handler
Control Mode
SwitchboardUser steering inputs
ControllersSecondary steering inputs
Control allocation
Steering inputs & settings
CheckServo positions
@60 Hz I2C-BusAdjusted positionsMicrocontroller
(in fin case)ServosPWM signals
Feedback Connection statusIndicators
Target values
Mode settings
Sensor Data
Kalman Filter Actual values @100 Hz
Steering Input Flow
Realtime-Application
(myRIO) Interface
(PC)
Heavy Calculations
(PC)
Demonstration 5/6

43
Live Stream Attitude Display Parameter Tuner Sensor Manager Data Logger
Design Process 2/4
User Interface

44
ROBUSTNESS
USER-FRIENDLINESS FLEXIBILITY
MODULARITY
OMNIDIRECTIONALITY
Design Process 2/4
Final Concept Key Characteristics

45
Achievements
Achievements 3/4

46
Omnidirectionality

47

48
Requirement Value Value achieved
Acceleration time 4s <1s
Deceleration time 2s <1s
Cruising speed 0,5 m/s 0,5 m/s
Drift velocity 0,1 m/s 0.18 m/s
Vertical diving speed 0,1 m/s 0.18 m/s
Angular speed roll-axis 20 °/s 30 °/s
Achievements 3/4
Requirements - Omnidirectionality

49
Achievements 3/4
Control Allocation

50
IMU
Pressure sensor
Achievements 3/4
Attitude Control

51
Achievements 3/4
Collision Avoidance

52
Introduction 1/4
Our Vision

53
Introduction 1/4

54
Introduction 1/4
Research

55
Introduction 1/4
Entertainment

56
Introduction 1/4
Filming Marine Life

57
Introduction 1/4
Offshore Engineering

58
Outlook
Outlook 4/4

59
http://www.baselinenglish.ch
Outlook 4/4
Basel

60
http://india.wikia.com
Outlook 4/4
India

61
Thank You for Your Attention
Web: sepios.org Email: [email protected] Phone: +41 44 632 69 53 Institute: www.asl.ethz.ch
Coaches Stefan Bertschi
Gregory Hitz
Andreas Schaffner
Directorship
Prof. Dr. Roland Siegwart
Dr. Roland Haas
Student Design Showcase, 04.08.2014, by Pascal Buholzer and Fabio Dubois
Address: Sepios, ASL CLA E17.2, ETH Zürich Tannenstr. 3, 8092 Zürich Switzerland
Credits

62
Credits

63
Credits

64
Credits

ni.com
NASA Student Launch Project
University of North Carolina at Charlotte

ni.com

ni.com
UNC Charlotte Student Launch Solid Fuel Rocket Motor Modulation
Jerry Dahlberg, Robert Stone and Dewey Greer

68 ni.com
UNC Charlotte: 2013-2014 Team

ni.com
Student Launch Program
The NASA Student Launch is a research-based, competitive and experiential exploration project that provides relevant
and cost-effective research and development to support the Space Launch System. [1]
[1] http://www.nasa.gov/audience/forstudents/studentlaunch/home/index.html

70 ni.com
The Project
• Required Payloads • Hazard detection system
• Structural and dynamic analysis of airframe, propulsion, and electrical systems during boost.
• Aerodynamic analysis of structural protuberances.
• Unique Team Payloads • Atmospheric sensor
package
• Thrust modulation system
• Vehicle Requirements • Must not exceed 20,000 ft
• Reusable
• Use commercial motors
• Team designed and constructed recovery system

71 ni.com
The Challenge
• The largest portion of the project involved dynamically controlling the thrust from a solid fuel rocket motor during motor burn to achieve a desired altitude, as well as conducting a dynamic analysis of propulsion during boost and protuberances during flight.
• To date, NASA and others have had limited success implementing a thrust modulation system on a solid fuel rocket.
• Modulating thrust in a liquid fuel motor is achieved by altering the air-fuel mixture in the motor, which is not possible in a solid fuel motor.

72 ni.com
The Experiments
• Experimentation was required to determine a method to modulate thrust during motor burn of a solid fuel motor.
• A variable nozzle extension, activated by a high torque servo motor modulated thrust during the motor burn, which only lasted 3.69 seconds.
• Controlled via a closed-loop system with feedback from an onboard accelerometer
• This modulation decreased the efficiency of the thrust and allowed the team to decrease acceleration, and limit the final altitude to near the desired 3100 feet.

73 ni.com
The Experiments

74 ni.com
Vehicle Design
• 93” in height, nominal 4” O.D.
• Carbon fiber and G10 fiberglass construction • C.F. provides good strength-to-weight ratio
• Fiberglass allows for better signal transmission
• Four distinct sections: • Booster: Houses motor, thrust modulation
system, and corresponding electronics
• Parachute bay: Houses drogue and main parachutes
• Recon Module: Ground scanning landing hazard detection, atmospheric sensor package
• Nose cone: Houses recon main parachute

75 ni.com
Key Design Features
• Thrust Modulation • Dynamic thrust modulation during motor burn
• Reconnaissance Module • Hazard detection via bottom mounted camera
• Strain gauge integration • Located in the body tubing and fins
Strain gauges integrated into the a fin
Thrust Modulation

76 ni.com
Payload Design

77 ni.com
Payload Design

78 ni.com
Data Acquisition and Control
• Each payload bay operated on its own dedicated myRIO unit
• Dual-core ARM cortex-A9 processor
• FPGA
• 40 digital I/O, 16 analog I/O, (10 input/6 output)
• Onboard data storage
• Onboard programmable LEDs (4), 3-axis accelerometer, WiFi
• The NI myRIO provided the necessary speed, I/O, and computing power for this application, as well as LabVIEW™ functionality

79 ni.com
Testing
• Atmospheric sensors were tested against a weather station on campus at UNC Charlotte.
• GPS sensors were tested outdoors in an open area. Signal was quickly and easily acquired.
• XBee transmitters were tested outdoors at long distances (greater than ½ mile) line-of-sight. Range was found to be approximately ¾ of a mile.
• Strain gauges were tested in a lab before and after installation.
• Thrust modulation was tested both on the test stand and in a lab.

80 ni.com
Flights
• 5 Sub-scale flights • Modulated thrust using fixed
length slider
• Recorded data to be used in student built shaker table
• 4 Full-scale flights • Modulated thrust by over 40%
• Scanned the ground for hazards
• Monitored stresses / strains in fins and body
• Recorded atmospheric conditions
• Data stored on-board and transmitted to ground station

81 ni.com
Full Scale Test Launch

82 ni.com
Results
• Successfully met all mission requirements
• Modulated thrust dynamically during flight
• Scanned ground for hazards
• Monitored and recorded stresses in vehicle
• Recorded atmospheric conditions
Awards • Best Vehicle Design - The most creative, innovative,
safety-conscious rocket design - NASA
• Lee College of Engineering / UNCC Senior Design Expo – 3rd Place

83 ni.com
Sponsors

84 ni.com
Full Team at Salt Lake City, Utah

85 ni.com
Team with Astronauts Charlie Precourt and Kent Rominger at NASA award Ceremony

86 ni.com
Thank You

87 ni.com

88 ni.com