
Neuromorphic Object Detection Recognition and Tracking Fopefolu Folowosele TELL – Research...
32
Neuromorphic Object Detection Recognition and Tracking Fopefolu Folowosele TELL – Research Overview September 17, 2009
-
Upload
aubrie-dorsey -
Category
Documents
-
view
230 -
download
1
Transcript of Neuromorphic Object Detection Recognition and Tracking Fopefolu Folowosele TELL – Research...

Neuromorphic Object Detection Recognition and Tracking
Fopefolu FolowoseleTELL – Research Overview
September 17, 2009

Outline
Introduction to Neuromorphic Engineering Computational Sensory Motor Systems Lab Research Focus Approach Neural Array Transceivers HMAX Model of Object Recognition Neural Algorithms Conclusion

Neuromorphic Engineering
Neuromorphic was coined by Carver Mead to describe VLSI systems containing circuits that mimic neuro-biological architectures present in the nervous system
Neuromorphic Engineering involves designing artificial neural systems whose physical architecture and design principles are based on those of biological nervous systems

Computational Sensory Motor Systems Laboratory

Research Focus Object detection, recognition and
tracking are computationally difficult tasks
Primates excel at these tasks Engineered systems are unable to
match their level of proficiency, flexibility and speed
Intelligent robots need to be able to interact with their surroundings with limited human involvement
This interaction involves:› Detecting the presence of the object› Recognizing the object› Tracking the trajectory of the object
Hyperexperience 2008
Agile Systems, 2009

Approach Our overall goal is to work towards developing a real-time
autonomous intelligent system that can detect, recognize and track objects under various viewing conditions
Emulate cortical functions of primates to design more intelligent artificial systems› Mimic the visual information processing of the primate’s visual
system› Model computationally-intensive algorithms in neural hardware
Population Surveillance and Visual Search Engines
Visual Prosthesis and Ocular Implants
Research Tool for Neuroscientists
Techarena 2009; Future Predictions 2008; R. Friendman, Biomedical Computation Review 2009

Projected Contributions Develop a spike-based processing platform on which we
can demonstrate object detection, recognition and tracking› Design the next generation neural array transceiver › Realize silicon facsimiles of cortical simple cells, complex cells
and composite feature cells› Implement neural algorithms analogous to cross-correlation and
Kalman filtering for object detection and tracking respectively

Software vs. Hardware Models
Software models run slower than real time
and are unable to interact with the
environment
Silicon designs take a few months to be fabricated,
after which they are constrained by limited
flexibilityIBM 2004; Tenore 2008

Solution Reconfigurable Models Neural array transceivers are
reconfigurable systems consisting of large arrays of silicon neurons
Useful for studying real-time operations of cortical, large-scale neural networks› Able to leverage the known
fundamental blocks such as the operation of neurons and synapses
› Flexible enough for testing out unknowns

Neuro-Computational Spiking and Bursting Models
Izhikevich’s model seems most appropriate but› Result of highly nonlinear curve fitting offering little insight into the
underlying biological mechanism› Interference between the state variables› Parameters are 4-5 orders of magnitude apart
E.M. Izhikevich, Neural Networks, 2004
Mihalas-Niebur Neuron Model› Generalized version of the leaky integrate-and-fire model with
adaptive threshold› More biologically relevant
Suggested modifications to the threshold interpreted as nonlinear voltage dependent channels

Mihalas-Niebur Neuron Simulations
Circuit MatLab
F. Folowosele et al., ISCAS, 2009

3D Design
In collaboration with the Sensory Communication and Microsystems Lab

Visual Pathways Primary Visual Cortex V1
transmits information to two primary pathways› Dorsal stream› Ventral stream
Dorsal pathway is associated with motion
Ventral pathway mediates the visual identification of objects
T. Poggio, NIPS, 2007Wikipedia, The Free Encyclopedia

HMAX Summarizes and
integrates large amount of data from different levels of understanding (from biophysics to physiology to behavior)
Two main operations occur in the model› Gaussian-like tuning
operation in the S layers› Nonlinear MAX-like
operation in the C layers
M. Riesenhuber & T. Poggio, Nature Neuroscience 1999

Preliminary Results: S1 and C1 Stages S1 neurons are oriented spatial filters that detect local
changes in contrast S1 cell integrates inputs from a 4x1 retinal receptive field C1 neurons take the MAX of similarly-oriented simple cells
over a region of space C1 cell integrates inputs from an array of 5x5 similarly-
oriented S1 cells
F. Folowosele et al., BioCAS 2008

MAX Operation Nonlinear saturating pooling function on a set of inputs, such
that the output codes the amplitude of the largest input regardless of the strength and number of the other inputs
Set of input neurons {X} causes the output Z to generate spikes at a rate proportional to the input with the fastest firing rate
R.J. Vogelstein et. al, NIPS 2007

Test1: Test Images and Resulting Simple Cells
(A1-4) Generated test images
(B1-4) Horizontally-oriented simple cells that respond to light-to-dark transitions
(C1-4) Vertically-oriented simple cells that respond to dark-to-light transitions
F. Folowosele et al., ISCAS 2007
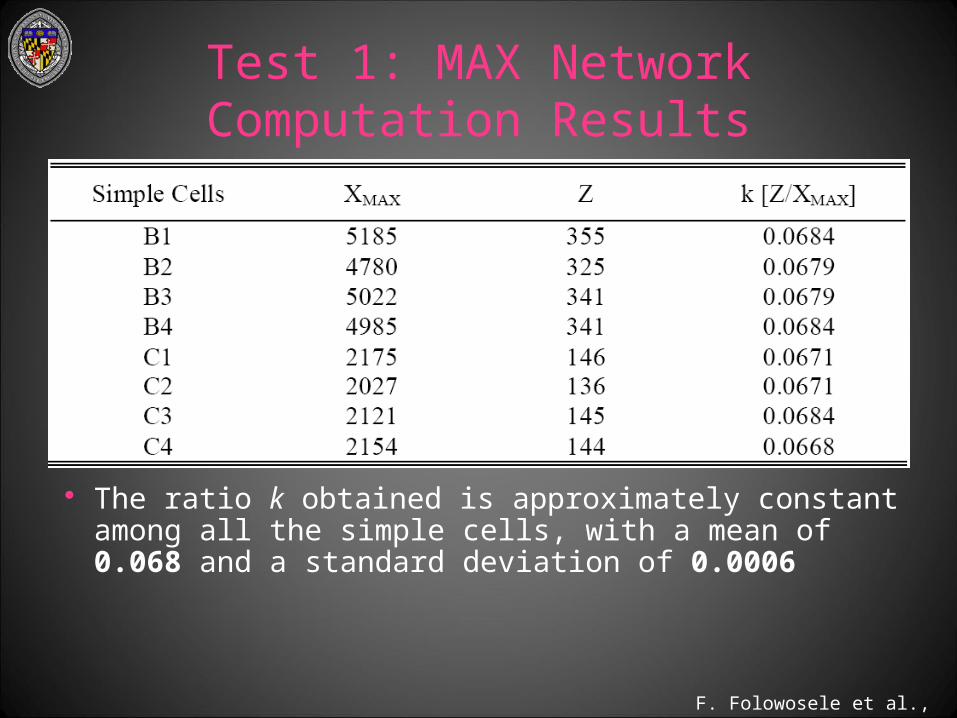
Test 1: MAX Network Computation Results
The ratio k obtained is approximately constant among all the simple cells, with a mean of 0.068 and a standard deviation of 0.0006
F. Folowosele et al., ISCAS 2007

Neural Algorithms
In computer vision, object detection and tracking algorithms are computationally-intensive processes› Cross-correlation for object and pattern detection› Kalman and particle filtering for object tracking
Neural-based algorithms are potentially more flexible and less computationally-intensive than their traditional counterparts

Object Detection Computation of cross correlation is utilized for
pattern and object detection Basis for neural cross-correlation is the
autocorrelative nature of the interspike interval histogram (ISIH) in spiking neurons› First proposed in 1951 (Licklider 1951) › ISIH for the auditory nerve ensemble response has
same shape as the autocorrelation function (Cariani 1996)
› Autocorrelation observed in accumulated output from a single integrate-and-fire neuron (Tapson 1998)

Neural Cross-Correlation The neural cross-correlation engine was proposed by
Jonathan Tapson in 2007 It utilizes integrate-and-fire neurons to produce cross-
correlation information in a novel way
J. Tapson & R. Etienne-Cummings ISCAS 2007

MatLab Simulation Results
ISIH as a proxy for correlation
Mathematical Computation
Interspike Interval (ISIH)
F. Folowosele et al., SPIE 2007

MatLab Simulation Results
Extracting the phase information of a signal
Mathematical Computation
Interspike Interval (ISIH)
F. Folowosele et al., SPIE 2007

Object Tracking Optimal solution to tracking tasks is Kalman filtering Core function of cerebral cortex hypothesized to
involve some mechanism of Kalman filtering Kalman filtering type algorithm used in hierarchical
generative model for visual recognition (Rao & Ballard 1997)
At each hierarchical level › Predicts current visual state at a lower level› Adapts own recognition state using the residual error
between the prediction and the actual lower-level state

Kalman Filtering Models natural processes in the external world
using a stochastic linear differential equation External system is described by a state vector
Each measurement vector satisfies
Organisms do not have access to the internal states of the world causing their sensory experiences
R. Rao, Uni. Of Rochester 1996T. Lacey, Georgia Tech. 1998

Neural Kalman Algorithm
Ralph Linsker’s Algorithm› Utilizes recurrent neural network composed of
linear-response nodes› Requires noisy measurement data as only input
Classical Kalman Approach› Estimate state vector
Neural Kalman Approach› Estimate measurement vector

Simple Tracking Example: 2D Plant State
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
1
1.5Measurement Plots
Measurement
NeuralClassical
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Measurement
NeuralClassical

Conclusion
We are designing a neural array transceiver on which we intend to implement › Stages of the HMAX hierarchical model of object
recognition› Neural algorithms for object detection and
tracking Our overall goal is to work towards developing
a real-time autonomous intelligent system with an artificial visual cortex

Acknowledgments Prof. Ralph Etienne-Cummings Computational Sensory Motor Systems Lab Members Sensory Communications and Microsystems Lab
Members Collaborators
› Jonathan Tapson (University of Cape Town)› Tara Hamilton (University of Queensland)› Ernst Niebur & Stefan Mihalas (JHU Mind-Brain Institute)
UNCF-Merck

References R.R. Murphy and E. Rogers, “Cooperative assistance for remote robot supervision,” Presence: Teleoperators and Virtual Environments Journal, vol. 5,
no. 2, pp. 224-240, 1996. T. Serre, M. Kouh, C. Cadieu, U. Knoblich, G. Kreiman, and T. Poggio, “A theory of object recognition: computations and circuits in the feedforward
path of the ventral stream in primate visual cortex,” AI Memo, MIT, Cambridge 2005. M. Riesenhuber, and T. Poggio, “Computational models of object recognition in cortex: a review,” Technical Report Artificial Intelligence Laboratory
and Department of Brain and Cognitive Sciences, Massachusetts Institute of Technology, 2000b. R.J. Vogelstein, U. Mallik, E. Culurciello, G. Cauwenberghs, R. Etienne-Cummings, “A multichip neuromorphic system for spike-based visual
information processing,” Neural Computation, vol. 19, pp. 2281-2300, 2007a. D.H. Goldberg, G. Cauwenberghs, and A.G. Andreou, “Probabilistic synaptic weighting in a reconfigurable network of VLSI integrate-and-fire
neurons,” Neural Networks, vol. 14, pp. 781-793, 2001. T.Y.W. Choi, P.A. Merolla, J.V. Arthur, K.A. Boahen, and B.E. Shi, “Neuromorphic implementation of orientation hypercolumns,” IEEE ISCAS 2005. R.J. Vogelstein, U. Mallik, J.T. Vogelstein, G. Cauwenberghs, “Dynamically reconfigurable silicon array of spiking neurons with conductance-based
synapses,” IEEE Transactions on Neural Networks, 2007b. A. Cassidy, S. Denham, P. Kanold, and A.G. Andreou, “FPGA-based silicon spiking neural array,” IEEE BioCAS 2007. B. E. Shi, E. K. C. Tsang, S. Y. M. Lam and Y. Meng, "Expandable hardware for computing cortical maps," IEEE ISCAS 2006. D.H. Hubel and T.N. Wiesel, “Receptive fields, binocular interaction and functional architecture in the cat's visual cortex,” Journal of Physiology, vol.
160, no. 1, 1962. L.G. Ungerleider, and J.V. Haxby, “What and where in the human brain,” Curr. Opin. Neurobiol., pp. 157-165, 1994. E. Rolls and T. Milward, “A model of invariant object recognition in the visual system: Learning rules, activation functions, lateral inhibition, and
information-based performance measures, Neural Computation, vol. 12, pp. 2547-2572, 2000. P Merolla and K Boahen, “A recurrent model of orientation maps with simple and complex cells,” Advances in Neural Information Processing Systems
(NIPS) 16, S Thrun and L Saul, Eds, MIT Press, pp 995-1002, 2004. R.P.N. Rao, “Robut Kalman filters for prediction, recognition, and learning,” Technical Report 645, Computer Science Department, University of
Rochester, 1996. J. Licklider, “A duplex theory of pitch perception,” Cellular and Molecular Life Sciences (CMLS), vol. 7, no. 4, pp. 128-134, 1951 J. Tapson, “Autocorrelation properties of single neurons,” Proceedings of the 1998 South African Symposium on Communication and Signal
Processing, 1998. J. Tapson, C. Jin, A. van Schaik and R. Etienne-Cummings, “A First-Order Nonhomogeneous Markov Model for the Response of Spiking Neurons
Stimulated by Small Phase-Continuous Signals,” Neural Computation, vol. 21, no. 6, pp. 1554-1588, June 2009. T. Lacey, “Tutorial: The Kalman filter,” Lecure Notes, Department of Computer Science, Georgia Institute of Technology, 1998. R. Linsker, “Neural network learning of optimal Kalman prediction and control,” Neural Networks, vol. 21, no. 9, pp. 1328-1343, 2008. R.E. Kalman, “A new approach to linear filtering and prediction problems,” Transactions of the ASME–Journal of Basic Engineering (Series D), pp. 35-
45, 1960. S. Mihalas and E. Niebur, “A generalized linear integrate-and-fire neural model produces diverse spiking behaviors,” Neural Computation, 2008 in Press.
C. Cadieu, M. Kouh, A. Pasupathy, C.E. Connor, M. Riesenhuber, T. Poggio, “A model of V4 shape selectivity and invariance,” J. Neurophysiol., 2007.

Figure References Self-driving Car:
http://hyperexperience.com/wp-content/uploads/2008/01/nissanpivot.jpg Space-station Builder: http://www.agilesystems.com/images/happy%20space
%20rigger2.jpg Population Surveillance & Visual Search Engine:
http://gallery.techarena.in/data/516/New-visual-search-engine-TinEye.jpg Visual Prosthesis & Ocular Implants:
http://futurepredictions.files.wordpress.com/2008/12/080129-bionic-eye_big.jpg Research Tool:
R. Friedman, “Reverse engineering the brain,” Biomedical Computation Review, vol. 5, no. 2, pp. 10-17, Spring 2009
Blue Gene: http://agix.files.wordpress.com/2008/11/blue_gene.jpg
Hardware Chip http://etienne.ece.jhu.edu/ftenore/research/publications/tenore_biocas08.pdf

Relevant Publications
F. Folowosele, T.J. Hamilton, A. Harrison, A. Cassidy, A.G. Andreou, S. Mihalas, E. Niebur and R. Etienne-Cummings, “A Switched Capacitor Implementation of the Generalized Linear Integrate-and-Fire Neuron,” Submitted to Proceedings of IEEE International Symposium on Circuits and Systems (ISCAS), 2009
F. Folowosele, R.J. Vogelstein, and R. Etienne-Cummings, “Real-Time Silicon Implementation of V1 in Hierarchical Visual Information Processing,” Proceedings of IEEE Biomedical Circuits and Systems Conference (BioCAS), Baltimore, Maryland, November 2008.
S. Chen, F. Folowosele, D. Kim, R.J. Vogelstein, E. Culurciello and R. Etienne-Cummings, “Size and Position Invariant Human Posture Recognition Algorithm with Spike-Based Image Sensor” Proceedings of IEEE Biomedical Circuits and Systems Conference (BioCAS), Baltimore, Maryland, November 2008.
F. Folowosele, F. Tenore, A. Russell, G. Orchard, M. Vismer, J. Tapson, and R. Etienne-Cummings, “Implementing a Neuromorphic Cross-Correlation Engine with Silicon Neurons,” Proceedings of IEEE International Symposium on Circuits and Systems (ISCAS), Seattle, Washington, May 2008.
J. Tapson, M.P. Vismer, C. Jin, A van Schaik, F. Folowosele, and R. Etienne-Cummings, “A Two-Neuron Cross-Correlation Circuit with a Wide and Continuous Range of Time Delay,” Proceedings of IEEE International Symposium on Circuits and Systems (ISCAS), Seattle, Washington, May 2008.
F. Folowosele, R.J. Vogelstein, R. Etienne-Cummings, “Spike-Based MAX Network for Nonlinear Pooling in Hierarchical Vision Processing,” Proceedings of IEEE Biomedical Circuits and Systems Conference (BioCAS), Montreal, Canada, November 2007.
F. Folowosele, J. Tapson, R. Etienne-Cummings, “A Wireless Address Event Representation System for Biological Sensor Networks,” Proc. SPIE (Bioengineered and Bioinspired Systems), 2007.

















