
Network Computing Laboratory Radio Interferometric Geolocation Miklos Maroti, Peter Volgesi,...
18
Network Computing Laboratory Radio Interferometric Ge Radio Interferometric Ge olocation olocation Miklos Maroti, Peter Volgesi, Sebestyen Dora Branislav Kusy, Gyorgy Balogh, Andras Nadas Karoly Molnar, Akos Ledeczi (Vanderbilt Univ.) 2006. 11. 07. Tue. Presentor : Kim, Chanho
-
Upload
tracy-leonard -
Category
Documents
-
view
222 -
download
0
Transcript of Network Computing Laboratory Radio Interferometric Geolocation Miklos Maroti, Peter Volgesi,...
Network Computing Laboratory
Radio Interferometric GeolocationRadio Interferometric Geolocation
Miklos Maroti, Peter Volgesi, Sebestyen Dora Branislav Kusy, Gyorgy Balogh, Andras NadasKaroly Molnar, Akos Ledeczi (Vanderbilt Univ.)
2006. 11. 07. Tue.Presentor : Kim, Chanho
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 2
ContentsContents
One Line SummaryIntroductionRIPS (Radio Interferometric Positioning System)
Source of ErrorImplementation IssuesRange CalculationLocalization
ExperimentConclusion
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 3
One Line SummaryOne Line Summary
Introduce novel ranging technique (RIPS) for wireless sensor networks using application of the interference signal

Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 4
IntroductionIntroduction
Many application of the WSN require individual nodes’ locationState of Art
Ultrasound method, Ultrasonic method, …Limitation : cannot have adequate accuracy , acceptable range at the same time / work in 2D only
Radio Interferometry High accuracy, long rangeWork in 3D environment
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 5
IntroductionIntroduction
TermsRanging: determine distances between nodesLocalization: find physical 3-D locations of nodesInterference: superposition of two or more waves resulting in a new wave patternInterferometry: cross-correlates a signal from a single source recorded by 2 observers, used in geodesy, astronomy, …
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 6
RIPS RIPS (Radio Interferometric Positioning System)(Radio Interferometric Positioning System)
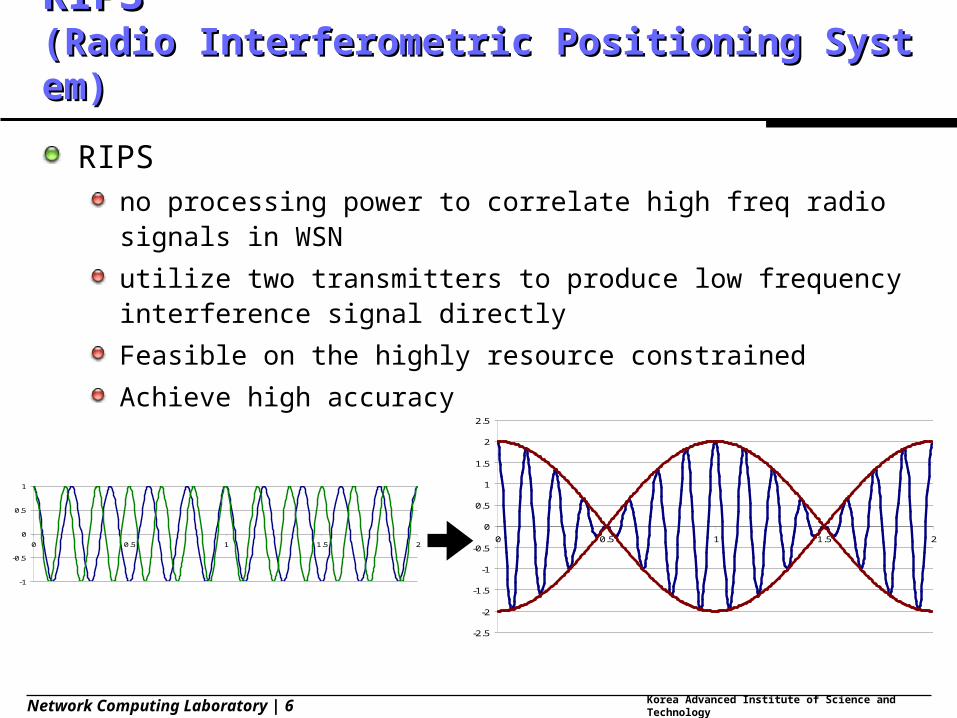
RIPSno processing power to correlate high freq radio signals in WSN
utilize two transmitters to produce low frequency interference signal directly
Feasible on the highly resource constrained
Achieve high accuracy
-1
-0.5
0
0.5
1
0 0.5 1 1.5 2
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0 0.5 1 1.5 2
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 7
RIPS RIPS (Radio Interferometric Positioning System)(Radio Interferometric Positioning System)
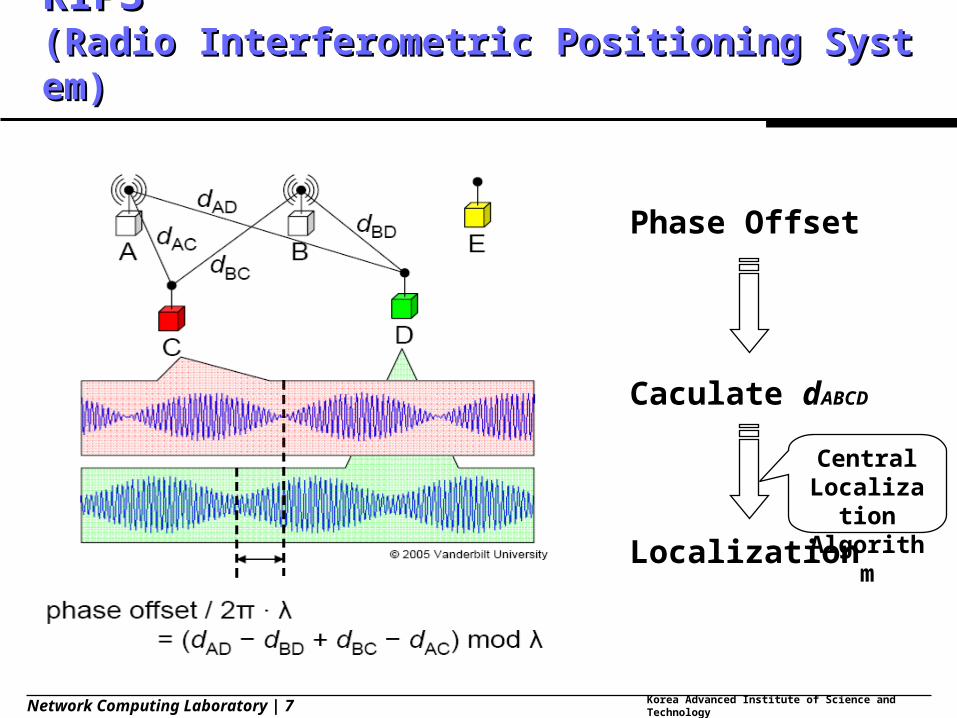
Phase Offset
Caculate dABCD
Localization
CentralLocalizationAlgorithm
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 8
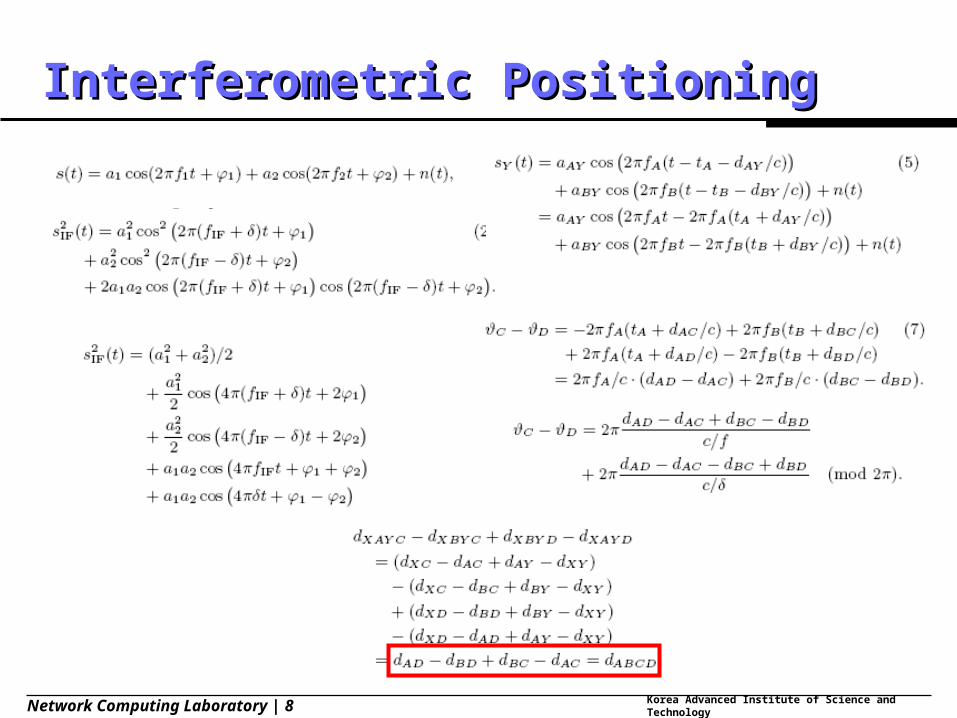
Interferometric PositioningInterferometric Positioning
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 9
Sources of ErrorSources of Error
Carrier Frequency InaccuracyCarrier Frequency Drift and Phase NoiseMultipath effectsAntenna OrientationRSSI measurement delay jitterRSSI Signal-to-Noise RatioSignal Processing ErrorTime Synchronization Error
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 10
RIPS implementation StepsRIPS implementation Steps
1. Selecting a pair of transmitters & scheduling2. Calibration of the radios of senders3. Transmission of a pure sine wave4. Analysis of the RSSI samples of the interference signal at
each of the receivers5. Calculation of the actual dABCD range from the measured rel
ative phase offset6. Localization algorithm
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 11
RIPS Implementation Issue RIPS Implementation Issue (1/2)(1/2)
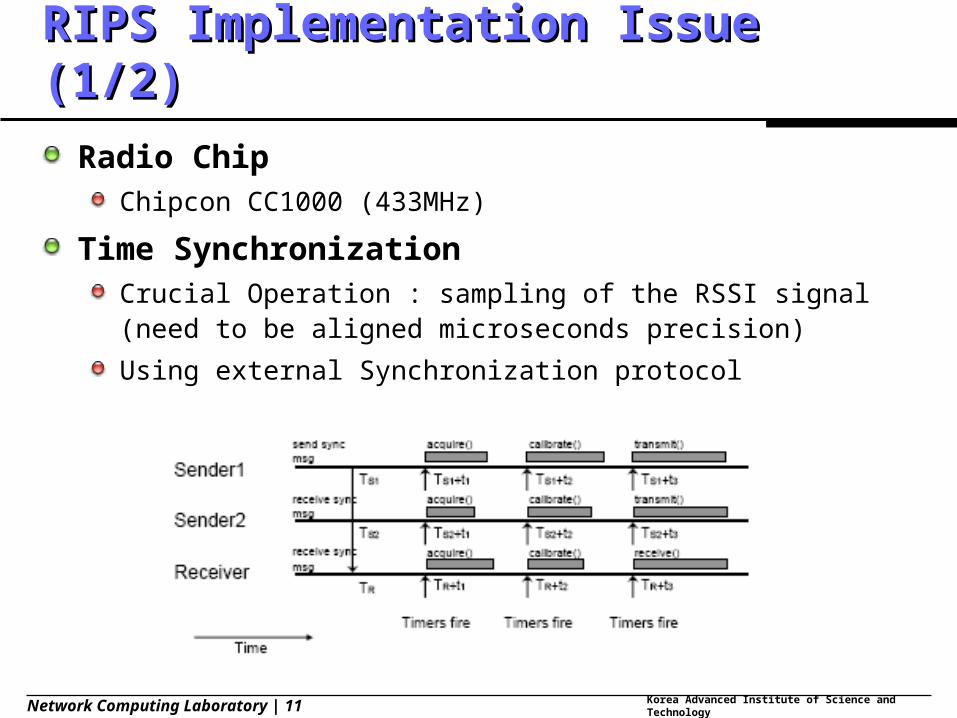
Radio ChipChipcon CC1000 (433MHz)
Time SynchronizationCrucial Operation : sampling of the RSSI signal (need to be aligned microseconds precision)Using external Synchronization protocol
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 12
RIPS Implementation Issue RIPS Implementation Issue (2/2)(2/2)
TuningTo measure interference accurately
Implement a frequency tuning algorithm
Frequency & Phase estimationRSSI values need to be processed on the motes
SchedulingHigh Level Scheduling
Responsible for selecting the pair of transmitters
Should minimize the number of interference measurement
Low Level Scheduling : Coordinates the activities of the two transmitters and multiple
Frequency tuning algorithm, phase offset estimation requires proper timing

Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 13
Range CalculationRange Calculation
Final dABCD = the solution with the minimum error value
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 14
LocalizationLocalization
Use an optimization method based on genetic algorithms (GA)Goal : find the relative positions of the nodesRequirement for this algorithm
Given a set of nodes with unknown locationsA set ‘M’ of dABCD ranges
OutputA node placement represented by a vector of (x,y,z) coordinates
Using genetic operators to fix the error of solutionCrossing overMutations
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 15
ExperimentsExperiments
Setup16 sensor nodes
Area : 18 x 18 meter
3 anchor points
Compare with high resolution DFT-based tone parameter estimation
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 16
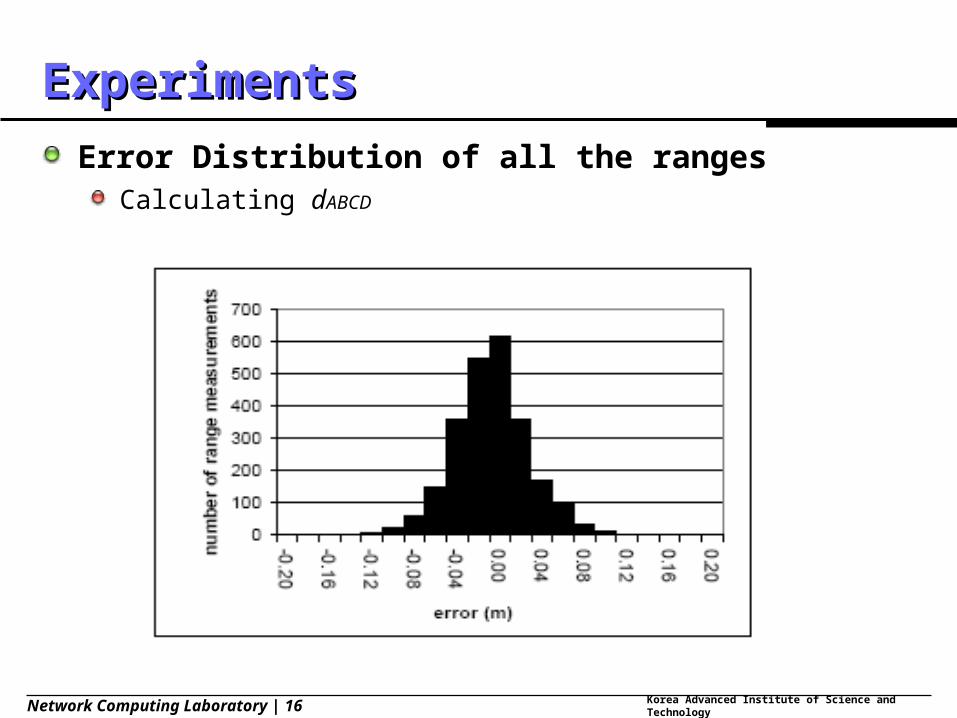
ExperimentsExperiments
Error Distribution of all the ranges Calculating dABCD
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 17
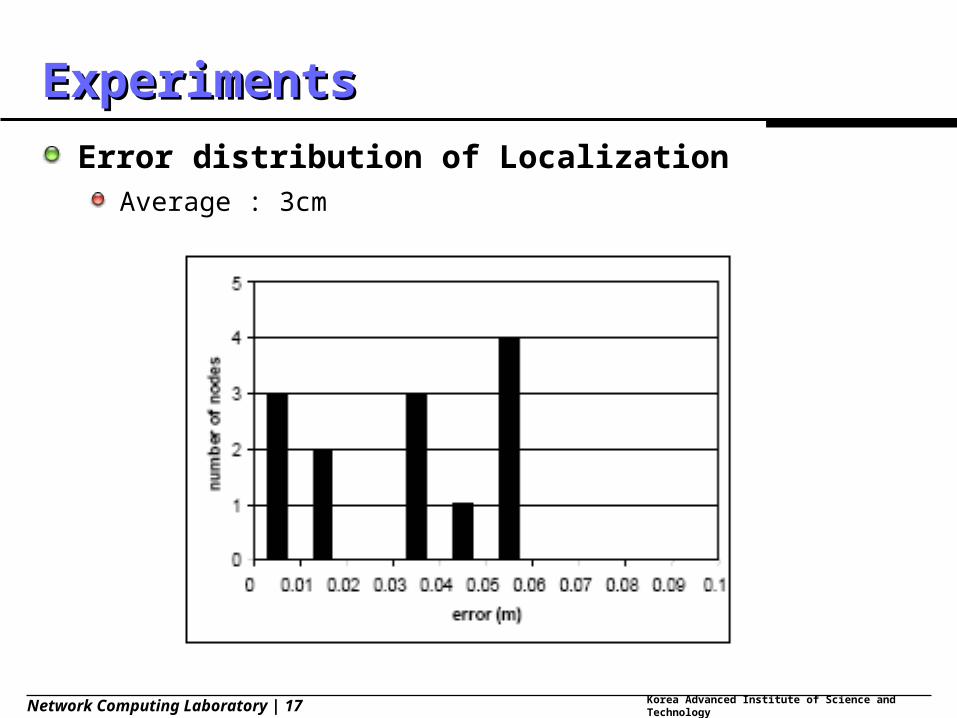
ExperimentsExperiments
Error distribution of LocalizationAverage : 3cm
Korea Advanced Institute of Science and Technology
Network Computing Laboratory | 18
ConclusionConclusion
Introduce RIPS (Radio Interferometric Position System) which is the novel ranging technique for wireless sensor networks
Achieve high accuracy, long range simultaneouslySupport 3D localization, does not require extra HW or calibration
Key Ideathe application of interference signal


















