NAP DY ELEKTRYCZNE WIELOBIEGOWE - komel.katowice.pl · NAP DY ELEKTRYCZNE WIELOBIEGOWE ... Silnik...
7
Tadeusz Glinka, Mieczyslaw Jakubiec BOBRME Komel, Katowice NAPDY ELEKTRYCZNE WIELOBIEGOWE MULTI-SPEED ELECTRIC DRIVES Abstract: Multi-speed electric drives are usually used in these cases, where work cycle of a given drive re- quires two or more different rotational speeds. Examples of such drives are pumps, fans, centrifuges, lifts etc. Another reason for using multi-speed drives is decreasing the energy consumption. Low energy consumption is ecological and economical criterion of the drive. If energy is not spent unneces- sarily, then it need not be generated. About 98 of electrical energy in Poland is produced by burning coal and therefore, if less coal is burnt, the emission of carbon dioxide, sulphur dioxide and nitrogen oxides goes down. Lower speed of the drive causes diminished wear of driven mechanical devices and decreases generated noise; a good instance of such drive is belt conveyor. Energy-saving drive is the type of drive drawing minimum en- ergy from the network necessary from the viewpoint of the engineering process – Fig.1. Energy required for engineering process during time t (e.g. day, month, year) is equal to. The driven mechanical system imposes load torque T ob and angular speed ω m on the motor. Equation (1) shows that the minimum energy consumption is achieved, when the drive operates at minimum allowable angular speed ( ω m min ). Usually the load torque is also minimum under such conditions. This type of working cycle algorithm in modern electric drives can be obtained by using cage induction motor supplied from power electronics converter (inverter). If we assume that, for a chosen drive, e.g. belt conveyor, the energy consumption per time unit (e.g. t = 24 h): - is equal to 100 per cent, when angular speed is kept constant (ω m = const) - drops down to 50 per cent in accordance with ω m min criterion (for a belt conveyor this speed corresponds to 100 per cent loading of the belt), then when two-speed drive is used, the energy consumption will go down to c. 70 percent, and with three- speed drive to c. 60 per cent. Two-or three-speed drive is cheaper and as easy to design as one-speed drive. Multi-speed drives can utilize the following motors: - multi-speed cage induction motors, - system of two induction slip-ring motors, supplied either individually or as a cascade system, - synchronous motors of special design, stator winding with switchable number of poles, - induction or synchronous motors supplied either from the network or from power-generator set (lower fre- quency, also lower voltage). Wstp Silniki elektryczne dwubiegowe s zwykle sto- sowane do napdu urzdze mechanicznych, których program pracy wymaga dwóch rónych prdkoci obrotowych. Do urzdze tych na- le: wirówki, wentylatory, pompy, dwigi osobowe i inne. Drugim powodem stosowania napdów wielobiegowych jest energooszczd- no. Energooszczdno napdu to pojcie w równym stopniu ekonomiczne jak i ekolo- giczne. Jeli energii elektrycznej nie zuywa si niepotrzebnie, to tej energii nie ma potrzeby wytwarza. W Polsce okolo 98% energii elek- trycznej uzyskuje si w wyniku spalania wgla, a zatem jeli mniej spali si wgla to zmniejszy si emisj gazów CO 2 , SO 2 , NO x . Praca napdu z nisz prdkoci obrotow zmniejsza take zuycie napdzanych urzdze mechanicznych i obnia generowany przez nie halas, przykla- dem s przenoniki tamowe. W napdach urzdze mechanicznych stosowanych w kopalniach zastosowanie silników wie- lobiegowych jest dyktowane przede wszystkim wzgldami energooszczdnoci. Definicja napdu energooszczdnego Napd energooszczdny jest to taki napd, który pobiera z sieci elektroenergetycznej mi- nimum energii potrzebnej do realizacji procesu technologicznego. Energia potrzebna do reali- zacji procesu technologicznego w okrelonym czasie t np. dzie, miesic, rok wynosi: = = t m ob t dt T dt P W 0 0 2 2 ω . (1) Napdzane urzdzenie mechaniczne narzuca silnikowi prdko ktow ω m i moment obci- enia T ob . Jak wynika z zalenoci (1) mini-
Transcript of NAP DY ELEKTRYCZNE WIELOBIEGOWE - komel.katowice.pl · NAP DY ELEKTRYCZNE WIELOBIEGOWE ... Silnik...

Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 135
Tadeusz Glinka, Mieczysław Jakubiec BOBRME Komel, Katowice
NAPDY ELEKTRYCZNE WIELOBIEGOWE
MULTI-SPEED ELECTRIC DRIVES
Abstract: Multi-speed electric drives are usually used in these cases, where work cycle of a given drive re-quires two or more different rotational speeds. Examples of such drives are pumps, fans, centrifuges, lifts etc. Another reason for using multi-speed drives is decreasing the energy consumption. Low energy consumption is ecological and economical criterion of the drive. If energy is not spent unneces-sarily, then it need not be generated. About 98 of electrical energy in Poland is produced by burning coal and therefore, if less coal is burnt, the emission of carbon dioxide, sulphur dioxide and nitrogen oxides goes down. Lower speed of the drive causes diminished wear of driven mechanical devices and decreases generated noise; a good instance of such drive is belt conveyor. Energy-saving drive is the type of drive drawing minimum en-ergy from the network necessary from the viewpoint of the engineering process – Fig.1. Energy required for engineering process during time t (e.g. day, month, year) is equal to. The driven mechanical system imposes load torque Tob and angular speed ωm on the motor. Equation (1) shows that the minimum energy consumption is achieved, when the drive operates at minimum allowable angular speed (ωm min). Usually the load torque is also minimum under such conditions. This type of working cycle algorithm in modern electric drives can be obtained by using cage induction motor supplied from power electronics converter (inverter). If we assume that, for a chosen drive, e.g. belt conveyor, the energy consumption per time unit (e.g. t = 24 h): - is equal to 100 per cent, when angular speed is kept constant (ωm = const) - drops down to 50 per cent in accordance with ωm min criterion (for a belt conveyor this speed corresponds to
100 per cent loading of the belt), then when two-speed drive is used, the energy consumption will go down to c. 70 percent, and with three-speed drive to c. 60 per cent. Two-or three-speed drive is cheaper and as easy to design as one-speed drive. Multi-speed drives can utilize the following motors: - multi-speed cage induction motors, - system of two induction slip-ring motors, supplied either individually or as a cascade system, - synchronous motors of special design, stator winding with switchable number of poles, - induction or synchronous motors supplied either from the network or from power-generator set (lower fre-
quency, also lower voltage). Wstp Silniki elektryczne dwubiegowe s zwykle sto-sowane do napdu urzdze mechanicznych, których program pracy wymaga dwóch rónych prdkoci obrotowych. Do urzdze tych na-le: wirówki, wentylatory, pompy, dwigi osobowe i inne. Drugim powodem stosowania napdów wielobiegowych jest energooszczd-no. Energooszczdno napdu to pojcie w równym stopniu ekonomiczne jak i ekolo-giczne. Jeli energii elektrycznej nie zuywa si niepotrzebnie, to tej energii nie ma potrzeby wytwarza. W Polsce około 98% energii elek-trycznej uzyskuje si w wyniku spalania wgla, a zatem jeli mniej spali si wgla to zmniejszy si emisj gazów CO2, SO2, NOx. Praca napdu z nisz prdkoci obrotow zmniejsza take zuycie napdzanych urzdze mechanicznych i obnia generowany przez nie hałas, przykła-dem s przenoniki tamowe. W napdach
urzdze mechanicznych stosowanych w kopalniach zastosowanie silników wie-lobiegowych jest dyktowane przede wszystkim wzgldami energooszczdnoci.
Definicja napdu energooszczdnego Napd energooszczdny jest to taki napd, który pobiera z sieci elektroenergetycznej mi-nimum energii potrzebnej do realizacji procesu technologicznego. Energia potrzebna do reali-zacji procesu technologicznego w okrelonym czasie t np. dzie, miesic, rok wynosi:
==t
mob
t
dtTdtPW
00
22 ω . (1)
Napdzane urzdzenie mechaniczne narzuca silnikowi prdko ktow ωm i moment obci-enia Tob. Jak wynika z zalenoci (1) mini-

Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 136
malne zuycie energii W2min uzyskuje si wów-czas, gdy napd pracuje z minimaln lecz do-puszczaln prdkoci ktow (ωm min). Wów-czas i moment obcienia Tob jest zwykle naj-mniejszy. Przykładem s wentylatory, pompy, a take przenoniki tamowe. Realizacja algo-rytmu pracy napdu z minimaln prdkoci ktow ωm min daje najwiksze oszczdnoci energii. Taki algorytm, pracy we współcze-snych napdach elektrycznych moe by reali-zowany np. przy pomocy silnika indukcyjnego klatkowego zasilanego z przemiennika (falow-nika) energoelektronicznego (rys. 1).
Rys. 1. Układ napdowy o regulowanej prdko-ci obrotowej
Jeli załoy, dla wybranego urzdzenia (np. przenonika tamowego), e zuycie energii w jednostce czasu (np. t = 24 godz.): − przy pracy ze stał prdkoci ktow
ωm = const. wynosi 100 %, − a przy pracy według kryterium ωm min wy-
nosi 50 % (np. dla przenonika tamowego jest to prdko przy której wystpuje pełne obcienie tamy),
to po zastosowaniu napdu dwubiegowego zu-ycie energii obniy si przykładowo do około 65 %, a przy napdzie trójbiegowym nawet do około 55 %. Napd dwu bd trójbiegowy jest tani i prosty w realizacji, podobnie jak napd jednobiegowy, gdy nie wymaga stosowania przekształtników energoelektronicznych, wy-starcz silniki dwu- bd trój- biegowe i dodat-kowe łczniki. Napdy wielobiegowe mog by realizowane przy pomocy: − wielobiegowych silników indukcyjnych klat-
kowych,
− układu dwóch silników indukcyjnych pier-cieniowych przełczanych z zasilania indy-widualnego w układ kaskadowy,
− silników synchronicznych o konstrukcji spe-cjalnej z uzwojeniem stojana o przełczalnej liczbie biegunów,
− silników indukcyjnych bd synchronicznych zasilany alternatywnie z sieci elektroenerge-tycznej bd obnion czstotliwoci (take obnionym napiciem) z przetwornicy elek-tromaszynowej.
Wielobiegowe silniki indukcyjne klat-kowe Fundamentaln zasad działania kadej ma-szyny elektrycznej jest równo iloci biegu-nów siły magnetomotorycznej uzwojenia sto-jana i wirnika, gdy tylko wówczas maszyna generuje moment elektromagnetyczny róny od zera. Właciwoci silników indukcyjnych klatkowych jest, e liczba biegunów uzwojenia wirnika dopasowuje si do liczby biegunów uzwojenia stojana. Właciwo ta jest wykorzy-stywana do konstrukcji silników wielobiego-wych. Silniki wielobiegowe konstruuje si z: − jednym uzwojeniem o przełczalnej liczbie
biegunów (silniki dwubiegowe), − o dwóch uzwojeniach (silniki dwu - trój
i cztero-biegowe).
Rys. 2. Uzwojenie o przełczalnej liczbie par biegunów
Sposób uzyskania, przy pomocy tego samego uzwojenia, dwóch rónych iloci biegunów zilustrowano na rys.2. Jak wida z rys.2 jedno przełczenie zacisków (2,3,4) zmienia liczb biegunów uzwojenia z 2pI = 2 na 2pII = 4. Po-dobnie mona zrealizowa uzwojenia o innej liczbie biegunów (2pI = 4,6,...) zachowujc sto-sunek par biegunów pI: pII = 1:2. Teoretycznie
Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 137
mona wykona take uzwojenie o przełczal-nej liczbie biegunów przy stosunku pI: pII = 1:3 oraz pI: pII = 4. Uzwojenia takiego w praktyce nie wykonuje si, gdy nie mona uzyska dla obydwóch przypadków (pI, pII), zblionych wartoci indukcji magnetycznej w szczelinie silnika. Moment elektromagnetyczny silnika zaley od kwadratu indukcji. Dla jednej z tych biegunowoci (pI lub pII) moment ten byłby mały i silnik nie wypełniałby swojej funkcji.
Z tego wzgldu silniki o stosunku par biegunów pI: pII ≠ 1: 2 wykonuje si z dwoma niezale-nymi uzwojeniami. Jedno uzwojenie ma liczb par biegunów pI, a drugie pII. Wykonanie silnika z dwoma uzwoje-niami stojana wymaga powikszenia łobków, co powiksza objto i mas silnika o objto jednego uzwojenia.
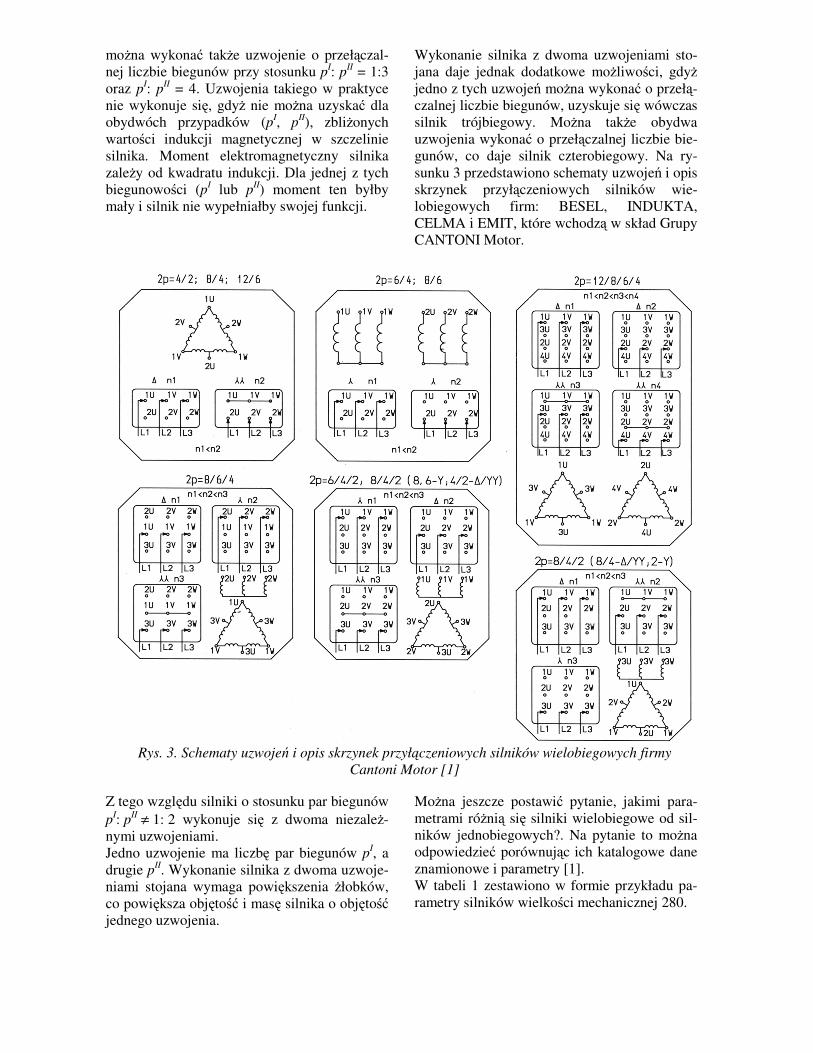
Wykonanie silnika z dwoma uzwojeniami sto-jana daje jednak dodatkowe moliwoci, gdy jedno z tych uzwoje mona wykona o przeł-czalnej liczbie biegunów, uzyskuje si wówczas silnik trójbiegowy. Mona take obydwa uzwojenia wykona o przełczalnej liczbie bie-gunów, co daje silnik czterobiegowy. Na ry-sunku 3 przedstawiono schematy uzwoje i opis skrzynek przyłczeniowych silników wie-lobiegowych firm: BESEL, INDUKTA, CELMA i EMIT, które wchodz w skład Grupy CANTONI Motor.
Mona jeszcze postawi pytanie, jakimi para-metrami róni si silniki wielobiegowe od sil-ników jednobiegowych?. Na pytanie to mona odpowiedzie porównujc ich katalogowe dane znamionowe i parametry [1]. W tabeli 1 zestawiono w formie przykładu pa-rametry silników wielkoci mechanicznej 280.
Rys. 3. Schematy uzwoje i opis skrzynek przyłczeniowych silników wielobiegowych firmy
Cantoni Motor [1]

Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 138
Tabela 1
Parametr Silnik jedno-biegowy
Silnik dwu-biegowy
Liczba biegunów 2 4 2 4 Wznios osi wału (wielko me-chaniczna) [mm]
280 280 280
Moc znamionowa [kW]
90 75 90 75
Napicie zna-mionowe [V]
380 380 380 380
Prd znamionowy [A] 159 133 156 133 Prdko zna-mionowa [ob./min]
2970 1483 2963 1485
Moment znamionowy [N ⋅m]
290 483 291 483
Sprawno zna-mionowa
94,7 94 93 94
cos ϕN 0,91 0,91 0,95 0,91 Krotno momentu rozruchowego
2 2 1,3 1,8
Krotno prdu rozruchowego
7 6,6 6,3 6,8
Krotno momentu maksymalnego
3,2 2,6 1,9 1,9
Masa silnika [kg] 605 555 630
Jak wida z tego zestawienia rónice dotyczce: sprawnoci, cos ϕ, prdu rozruchowego s nie-wielkie, Wiksze rónice dotycz momentu roz-ruchowego i momentu maksymalnego. Silnik dwubiegowy ma take wiksz mas.
Elektromaszynowa kaskada asynchro-niczna Elektromaszynow kaskad asynchroniczn mona zbudowa w oparciu o dwa silniki in-dukcyjne piercieniowe o identycznych para-metrach. Układ napdowy z dwoma silnikami indukcyjnymi piercieniowymi, napdzajcymi jeden wał mechaniczny, mona połczy w układ elektromaszynowej kaskady asynchro-nicznej [2]. Układ kaskadowy otrzymuje si, gdy silnik M1 (rys.4) jest zasilany z sieci, uzwojenia wirnika silników M1 i M2 s poł-czone w szereg, a uzwojenie stojana silnika M2 jest zwarte. Sekwencja faz wirnika silnika M2 musi by taka, aby momenty elektromagnetyczne silni-ków M1 i M2 w zakresie prdkoci ktowych 0 ≤ ωm ≤ 0,5ωmN współdziałały ze sob. W układzie kaskadowym prdko obrotowa wału jest dwukrotnie mniejsza od prdkoci znamionowej silników przy indywidualnym za-silaniu z sieci.
Rys. 4. Praca indywidualna (a) i w układzie elektromaszynowej kaskady asynchronicznych (b)silników indukcyjnych piercieniowych M1 i M2
Tak wic układ ten mona wykorzysta do skokowej zmiany prdkoci obrotowej napdu. Nie jest on jednak w praktyce powszechnie stosowany z uwagi na to, e przecialno momentem układu kaskadowego jest znacznie mniejsza od przecialnoci momentem jednego silnika, a prd biegu jałowego jest o około 50 % wikszy od prdu biegu jałowego jednego silnika [3]. Do zwikszenia przecial-noci momentem i obnienia prdu biegu jało-wego mona doprowadzi kompensujc moc biern silnika M2 za pomoc baterii kondensa-torów C włczonych równolegle w obwód wir-ników [4]. Tego typu skompensowana kaskada asynchroniczna (rys.5) ma korzystny przebieg charakterystyk elektromechanicznych i jest sto-sowana w kopalniach wgla brunatnego, eks-ploatujcych przenoniki tamowe. Zastpienie w przenonikach dotychczasowego napdu ka-skad nie wymaga duych inwestycji, gdy kady przenonik o duej wydajnoci jest nap-dzany dwoma lub czterema silnikami.
Rys. 5. Układ elektromaszynowej skompenso-wanej kaskady asynchronicznej z rezystorami rozruchowymi
Pojemno baterii kondensatorów powinna by dobrana optymalnie. Gdy pojemno jest za
Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 139
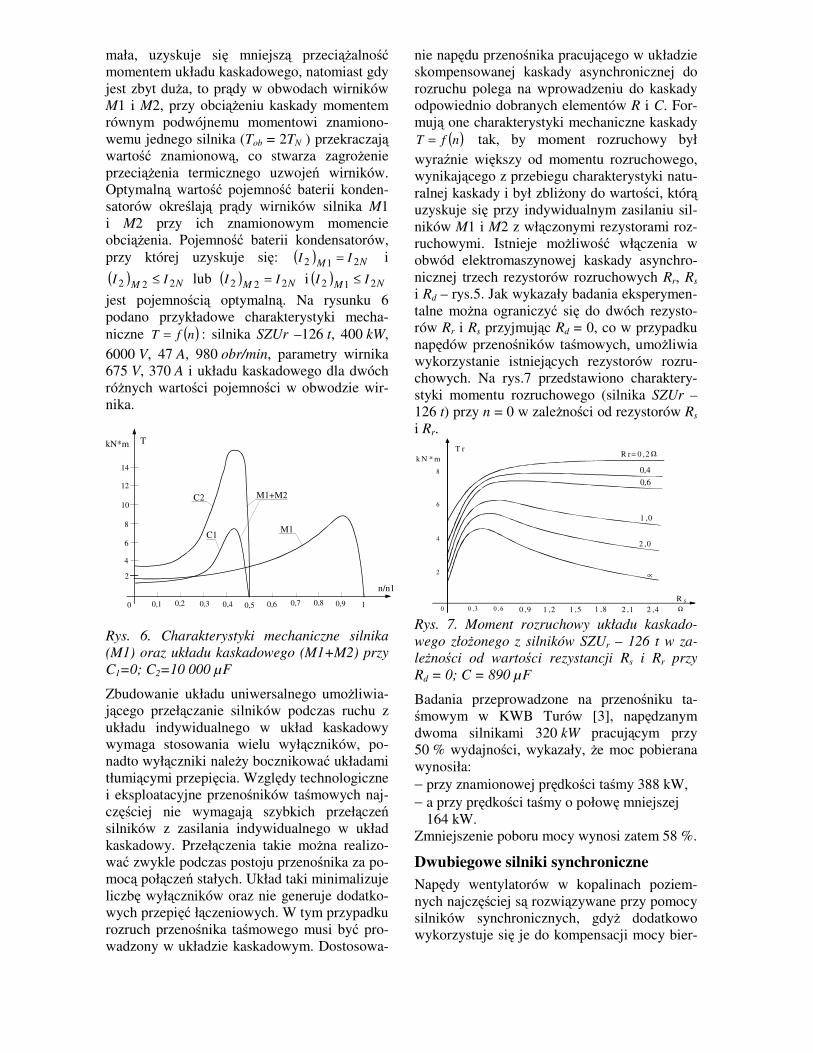
mała, uzyskuje si mniejsz przecialno momentem układu kaskadowego, natomiast gdy jest zbyt dua, to prdy w obwodach wirników M1 i M2, przy obcieniu kaskady momentem równym podwójnemu momentowi znamiono-wemu jednego silnika (Tob = 2TN ) przekraczaj warto znamionow, co stwarza zagroenie przecienia termicznego uzwoje wirników. Optymaln warto pojemno baterii konden-satorów okrelaj prdy wirników silnika M1 i M2 przy ich znamionowym momencie obcienia. Pojemno baterii kondensatorów, przy której uzyskuje si: ( ) NM II 212 = i ( ) NM II 222 ≤ lub ( ) NM II 222 = i ( ) NM II 212 ≤ jest pojemnoci optymaln. Na rysunku 6 podano przykładowe charakterystyki mecha-niczne ( )nfT = : silnika SZUr –126 t, 400 kW, 6000 V, 47 A, 980 obr/min, parametry wirnika 675 V, 370 A i układu kaskadowego dla dwóch rónych wartoci pojemnoci w obwodzie wir-nika.
2
4
6
8
10
12
14
kN*m T
n/n1
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
M1+M2
M1C1
C2
Rys. 6. Charakterystyki mechaniczne silnika (M1) oraz układu kaskadowego (M1+M2) przy C1=0; C2=10 000 µF
Zbudowanie układu uniwersalnego umoliwia-jcego przełczanie silników podczas ruchu z układu indywidualnego w układ kaskadowy wymaga stosowania wielu wyłczników, po-nadto wyłczniki naley bocznikowa układami tłumicymi przepicia. Wzgldy technologiczne i eksploatacyjne przenoników tamowych naj-czciej nie wymagaj szybkich przełcze silników z zasilania indywidualnego w układ kaskadowy. Przełczenia takie mona realizo-wa zwykle podczas postoju przenonika za po-moc połcze stałych. Układ taki minimalizuje liczb wyłczników oraz nie generuje dodatko-wych przepi łczeniowych. W tym przypadku rozruch przenonika tamowego musi by pro-wadzony w układzie kaskadowym. Dostosowa-
nie napdu przenonika pracujcego w układzie skompensowanej kaskady asynchronicznej do rozruchu polega na wprowadzeniu do kaskady odpowiednio dobranych elementów R i C. For-muj one charakterystyki mechaniczne kaskady
( )nfT = tak, by moment rozruchowy był wyranie wikszy od momentu rozruchowego, wynikajcego z przebiegu charakterystyki natu-ralnej kaskady i był zbliony do wartoci, któr uzyskuje si przy indywidualnym zasilaniu sil-ników M1 i M2 z włczonymi rezystorami roz-ruchowymi. Istnieje moliwo włczenia w obwód elektromaszynowej kaskady asynchro-nicznej trzech rezystorów rozruchowych Rr, Rs i Rd – rys.5. Jak wykazały badania eksperymen-talne mona ograniczy si do dwóch rezysto-rów Rr i Rs przyjmujc Rd = 0, co w przypadku napdów przenoników tamowych, umoliwia wykorzystanie istniejcych rezystorów rozru-chowych. Na rys.7 przedstawiono charaktery-styki momentu rozruchowego (silnika SZUr – 126 t) przy n = 0 w zalenoci od rezystorów Rs i Rr.
R S
Ω1 ,2 1 ,5 1 ,8 2 ,1 2 ,4
R r= 0 ,2 Ω
1 ,0
2 ,0
∝2
4
6
8
0 0 ,3 0 ,6 0 ,9
k N * mT r
0,40,6
Rys. 7. Moment rozruchowy układu kaskado-wego złoonego z silników SZUr – 126 t w za-lenoci od wartoci rezystancji Rs i Rr przy Rd = 0; C = 890 µF
Badania przeprowadzone na przenoniku ta-mowym w KWB Turów [3], napdzanym dwoma silnikami 320 kW pracujcym przy 50 % wydajnoci, wykazały, e moc pobierana wynosiła: − przy znamionowej prdkoci tamy 388 kW, − a przy prdkoci tamy o połow mniejszej
164 kW. Zmniejszenie poboru mocy wynosi zatem 58 %.
Dwubiegowe silniki synchroniczne Napdy wentylatorów w kopalinach poziem-nych najczciej s rozwizywane przy pomocy silników synchronicznych, gdy dodatkowo wykorzystuje si je do kompensacji mocy bier-

Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 140
nej innych odbiorników energii pracujcych w kopalni. Maszyny synchroniczne maj, przez bieguny wzbudzenia, konstrukcyjnie narzucan biegunowo i nie s zatem przystosowane do tego, aby by maszynami dwubiegowymi. Na Politechnice Wrocławskiej rozwizano jednak ten problem [4]. Uzwojenie stojana wykonuje si jako dwubiegowe: − podstawowa liczba par biegunów uzwoje-
nia (pI) jest mniejsza i wynika z konstrukcji wirnika,
− wiksza liczba par biegunów pII = pI + 1 lub pII = pI + 2.
Maszyny synchroniczne napdzajce wentyla-tory s wielobiegunowe (2 pI ≥ 10). konstrukcja uzwojenia przełczalnego o liczbie par biegu-nów pI ≥ 5 i pII ≥ pI + 1 nie jest spraw łatw. Uzwojenia takiego nie da si zoptymalizowa dla dwóch zblionych do siebie prdkoci ob-rotowych. Maszyn uzyskuje si w pełni syme-tryczn dla podstawowej liczby par biegunów pI, natomiast dla liczby par biegunów pII mona uzyska symetri elektryczn uzwojenia stojana lecz nie da si uzyska symetrii magnetycznej. Jeszcze wiksze problemy wystpuj z uzyska-niem w wirniku zmniejszenia liczby biegunów (2 pII). Zmniejsza si liczb biegunów magne-tycznych poprzez połczenie cewek wzbudze-nia dwóch ssiednich biegunów tak, aby two-rzyły jeden biegun lub wyłcza si cewki nie-których biegunów. Tak przełczone uzwojenie wzbudzenia wytwarza niesymetryczny rozkład siły magnetomotorycznej (SMM) w szczelinie. W tabeli 2 dla maszyny o prdkociach syn-chronicznych 375 obr/min (p1=8) i 300 obr/min (p2=10), zestawiono kolejne harmoniczne SMM wirnika [4].
Podane wartoci procentowe amplitudy po-szczególnych harmonicznych odniesione zo-stały do 1-wszej harmonicznej przestrzennej natenia pola magnetycznego wzbudzenia przy p1 = 8; H1 = 8800 A/m = 100 %. Jak wida z tabeli 2 silnik synchroniczny na drugim biegu (300 obr/min; p2 = 10) jest wzbudzany drug harmoniczn pola o liczbie par biegunów 10 której amplituda natenia pola wynosi 62 %. Jednak w polu magnetycznym wzbudzenia wy-stpuje całe spektrum harmonicznych, a ich wartoci s znaczne, Harmoniczne te oddziały-waj na prac silnika i jego właciwoci Silnik ma jednak cenn zalet, e jest dwubie-gowy (375 obr/min i 300 obr/min), ma te wady przy pracy na drugim biegu (300 obr/min): - mniejsza (o ok.40%) przecialnoci momen-
tem, - niewielka moliwo regulacji cos ϕ, - generacja wyszych harmonicznych do sieci
elektroenergetycznej, - zwikszone drgania i głono pracy (hałas). Alternatywnym rozwizaniem napdów wen-tylatorów w kopalniach podziemnych moe by zastosowanie dwóch silników synchronicznych o rónej liczbie par biegunów (np. pI = 8 i pII = 10) sprzgnitych ze sob i tworzcych wspólny wał mechaniczny (rys. 8). Silnik o wikszej liczbie par biegunów (pII = 10) moe mie odpowiednio mniejsz moc znamionow. Rozwizanie to wymaga jednak wikszego fundamentu oraz na jednym z silników dwóch kocówek napdowych wału. Jeli wystpuj ograniczenia, które uniemoliwiaj instalacj dwóch silników obok siebie, to mona zainsta-lowa dodatkow elektromaszynow przetwor-nic czstotliwoci - rys.9. Przetwornica cz-stotliwoci składa si z dwóch maszyn syn-chronicznych: - silnika M2 o liczbie par biegunów pII - generatora G o liczbie par biegunów pIII <pII.
M3 M1W
S1S4
U
Rys.8. Napd wentylatora dwoma silnikami synchronicznymi M1 o liczbie par biegunów pI i M3 o liczbie par biegunów pII
p1 = 8 p2 = 10 Kolejna harmoniczna przestrzenna
1 2 3 0 1 2 3 4 5 6 7 8
Liczba par biegunów na obwodzie
8 24 40 1 5 10 14 18 22 26 38 42
Amplituda SMM w %
100
27 10 31 68 62 20 15 23 13 6 7
Tabela 2

Zeszyty Problemowe – Maszyny Elektryczne Nr 71/2005 141
M2 G M1
S2 S3 S1
U
W
Rys. 9. Silnik M1 napdzajcy wentylator jest zasilany z dwóch ródeł napicia
Pierwszy stopie prdkoci obrotowej (wyszy) wentylatora uzyskuje si przy zasilaniu silnika M1 z sieci elektroenergetycznej U. Prdko obrotowa wentylatora
Ipn 3000
1 = (2)
gdzie: p1 oznacza liczb par biegunów silnika M1. W tym stanie pracy przetwornica elektroma-szynowa (M1 – G) nie pracuje. Drugi stopie prdkoci obrotowej (niszy) uzyskuje si zasilajc silnik M1 z generatora G. Prdko obrotowa silnika M1 wówczas wy-nosi:
III
II
ppnn 12 = (3)
Moment i moc obcienia silnika M1 napdza-jcego wentylator W przy prdkoci n2 s mniejsze ni przy prdkoci n1, std moce zna-mionowe i gabaryty maszyn (M2 – G) s odpo-wiednio mniejsze od mocy znamionowej i ga-barytu silnika M1. Układy napdowe wentylatora zaprezentowane na rys.8 i rys.9 rozwizuj problem energoosz-czdnej pracy napdu, s kompatybilne z sieci elektroenergetyczn, gdy nie generuj wy-szych harmonicznych, rozwizuj problem kompensacji mocy biernej kopalni na oby-dwóch stopniach prdkoci obrotowej wenty-latora (silnikiem M1 przy n1 i silnikiem M2 przy n2) i nie powikszaj drga i hałasu silnika M1.
Wnioski Najwiksze oszczdnoci energii pobieranej przez układ napdowy uzyskuje si poprzez ob-nienie prdkoci obrotowej do wartoci do-puszczalnej z technologicznego punktu widze-nia. Prostym rozwizaniem energooszczdnego napdu urzdze elektromechanicznych pracu-jcych w kopalniach jest napd dwustopniowy. Dwa stopnie prdkoci obrotowej mona uzy-
ska przy pomocy: dwubiegowego silnika in-dukcyjnego klatkowego, elektromaszynowej kaskady złoonej z dwóch silników indukcyj-nych piercieniowych oraz silników synchro-nicznych z uzwojeniami o przełczalnej liczbie biegunów. Godny uwagi jest take układ nap-dowy z dwoma silnikami synchronicznymi (rys.8) oraz układ napdowy z elektromaszy-now przetwornic czstotliwoci (rys.9), które z punktu widzenia: kompensacji mocy biernej, kompatybilnoci elektromagnetycznej, drga i hałasu stanowi rozwizanie najbardziej ko-rzystne.
Literatura [1]. Katalog silników elektrycznych firmy Cantoni Motor. [2]. Glinka T., Lisowski J.: Zuycie energii przez przenoniki tamowe i moliwoci jego zmniejszenia. „Przegld Elektrotechniczny” 1989, z.1, s. 5 - 8. [3]. Glinka T., Kulesz B., Lechowicz K., Lisowski J.: Skompensowana kaskada asynchroniczna i jej zastosowanie w napdach przenoników tamowych. „Przegld Elektrotechniczny” 1992, z. 8, s. 175–179. [4]. Antal L., Zawilak J.: Kształtowanie pola magnetycznego dwubiegowego silnika synchronicz-nego. Zeszyty Problemowe „Maszyny Elektryczne BOBRME” 2003, nr 65, s. 67-72.