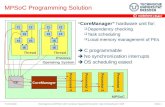
Simulator Generation Method of Configurable Processors for MPSoC
date post
22-Dec-2015Category
view
217download
0
Multiprocessor System-on-Chip(MPSoC) Technology
Wayne Wolf, Ahmed Amine Jerraya and Grant Martin
Presented by Santosh Ponnala
1
Brief Overview
• Introduction• Multiprocessors and the Evolution of MPSoCs• How Applications Influence Architecture• Architectures for Real-Time Low-Power
Systems• CAD Challenges in MPSoCs• Conclusion
2

Introduction
• What is a MPSoC?• Where are they used?• System Requirements?• Why MPSoC?• What is a Multiprocessor?• How is a MPSoC different from a
Multiprocessor?
3

What is a Parallel Architecture• A large collection of processing
elements that communicate and cooperate to solve large problems fast. [-- Almasi and Gottlieb]
• “ collection of processing elements”– How many? How powerful each?
Scalability?
• “ that can communicate”– How do PEs communicate?
(shared memory vs message passing)
– Interconnection Networks (bus, crossbar, ..) 4
Serial Computing
Parallel Computing

Why Use Parallel Computing?
5
Main Reasons:
• Save time and/or money
• Solve larger Problems
• Provide Concurrency
• Limits to serial computing
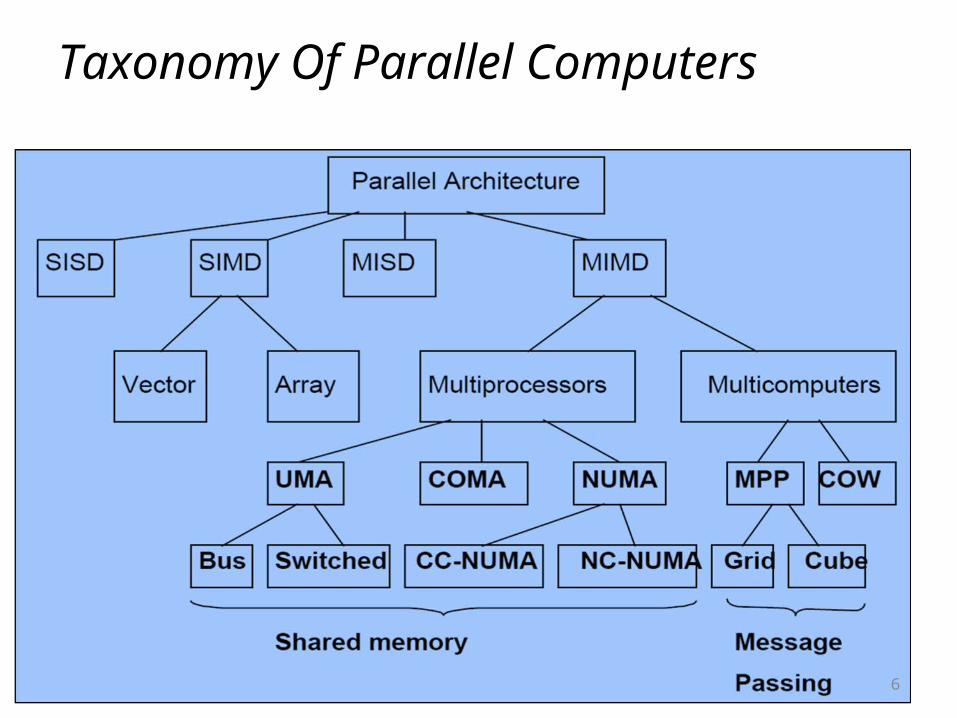
Taxonomy Of Parallel Computers
6

Vector vs Array Processing
Let n be the size of each vector. Then, the time to compute f (V1, V2) = k + (n-1), where k is the length of the pipe f.
Array Processing
In array processing, each of the operations f (V1j, V2j) with the components of the two vectors is carried out simultaneously, in one step.
7
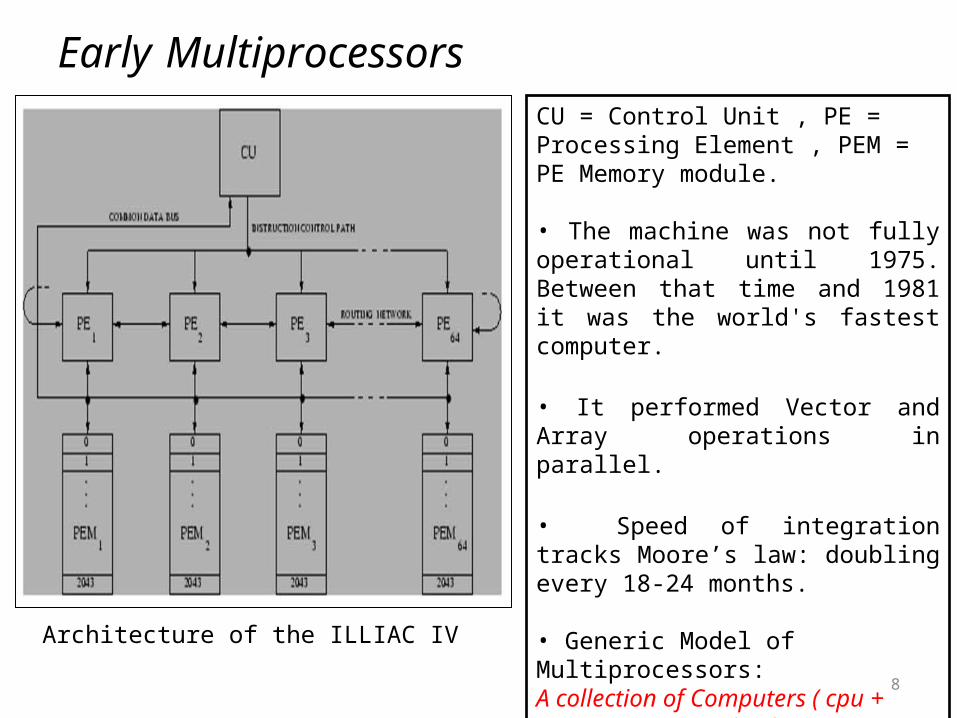
Early Multiprocessors
Architecture of the ILLIAC IV
CU = Control Unit , PE = Processing Element , PEM = PE Memory module.
• The machine was not fully operational until 1975. Between that time and 1981 it was the world's fastest computer.
• It performed Vector and Array operations in parallel.
• Speed of integration tracks Moore’s law: doubling every 18-24 months.
• Generic Model of Multiprocessors: A collection of Computers ( cpu + memory) communicating over an interconnect network. [ Culler et al.]
8
Why did uniproccesor performance grow so fast?
• ~ half from circuit improvement (smaller transistors, faster clock, etc.)
• ~ half from architecture/organization:• Instruction Level Parallelism (ILP)
– Pipelining: RISC, CISC with RISC backend– Superscalar– Out of order execution
• Memory hierarchy (Caches)– Exploiting spatial and temporal locality– Multiple cache levels
9

History of Multiprocessors• 80s – early 90s: prime time for parallel architecture research
– A microprocessor cannot fit on a chip, so naturally need multiple chips (and processors)
• 90s: at the low end, uniprocessor system’s speed grows much faster than parallel system’s speed
– A microprocessor fits on a chip. So do branch predictor, multiple functional units, large caches, etc!
– Microprocessor also exploits parallelism (pipelining, multiple issue, VLIW) – parallelisms originally invented for multiprocessors
• 90s: emergence of distributed (vs. parallel) machines (Progress in network technologies:)
– Network bandwidth grows faster than Moore’s law– Fast interconnection network getting cheap– Connects cheap uniprocessor systems into a large distributed machine– Network of Workstations, Clusters, GRID.
• 00s: parallel architectures are back– Transistors per chip >> microproc transistors– Harder to get more performance from a uniprocessor– E.g. Intel Pentium D, Core Duo, AMD Dual Core, IBM Power5, Sun Niagara, etc.
10
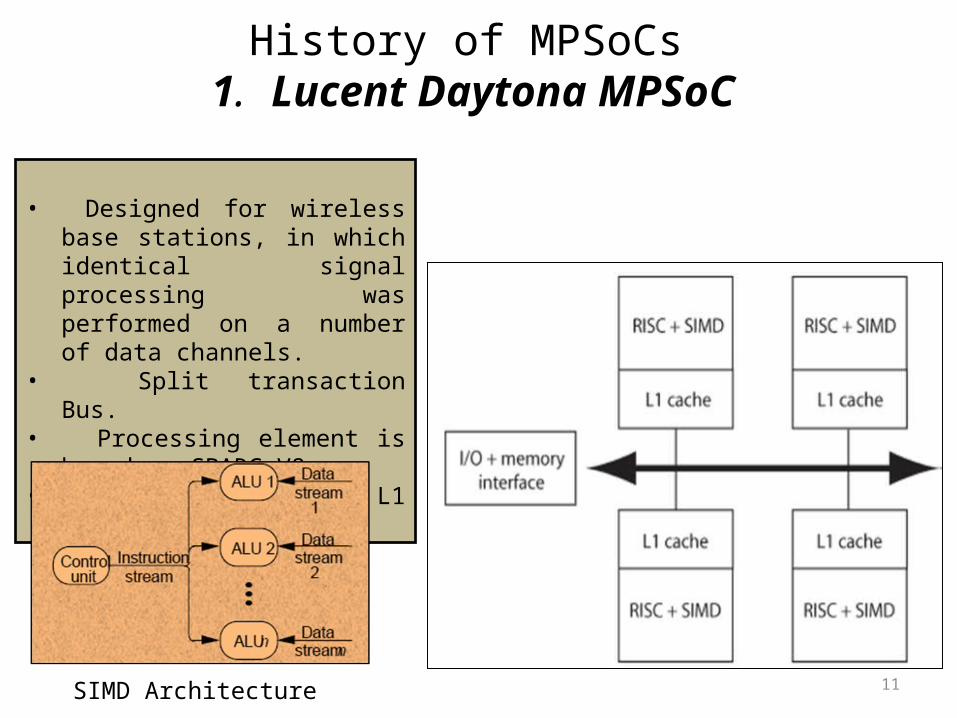
History of MPSoCs 1. Lucent Daytona MPSoC
• Designed for wireless base stations, in which identical signal processing was performed on a number of data channels.
• Split transaction Bus. • Processing element is based on
SPARC V8.• Reconfigurable L1 cache.
SIMD Architecture 11
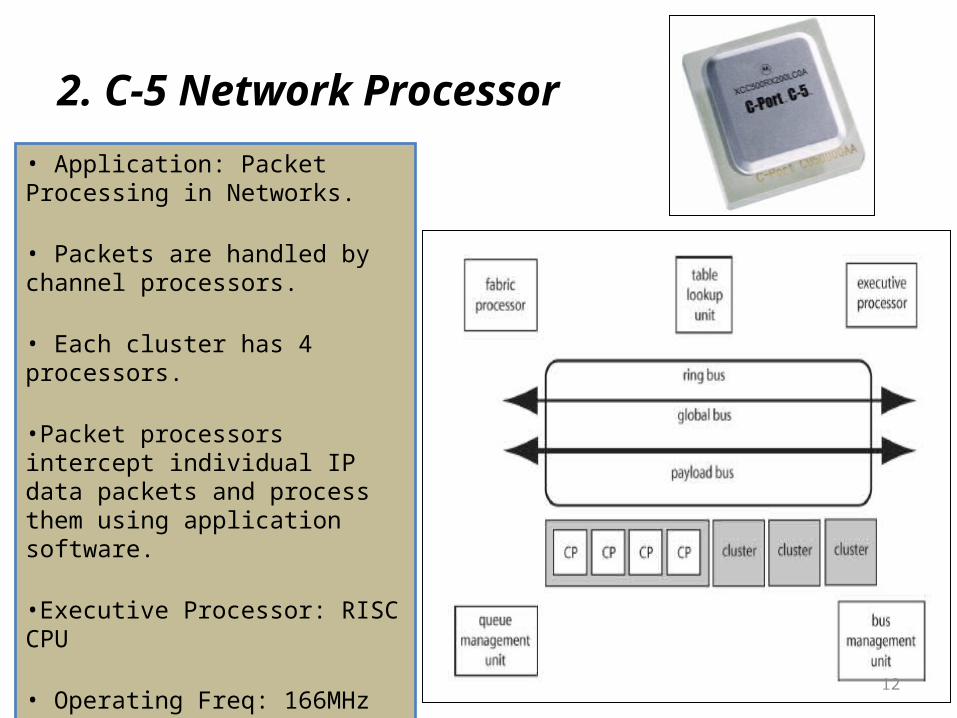
2. C-5 Network Processor
• Application: Packet Processing in Networks.
• Packets are handled by channel processors.
• Each cluster has 4 processors.
•Packet processors intercept individual IP data packets and process them using application software.
•Executive Processor: RISC CPU
• Operating Freq: 166MHz - 233MHz
12
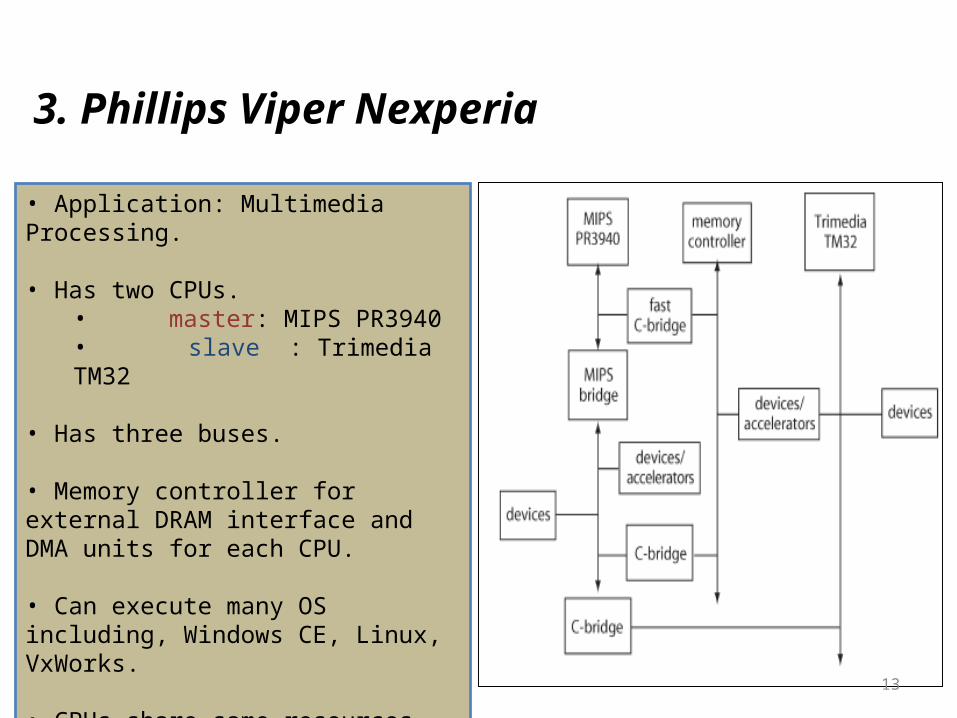
3. Phillips Viper Nexperia
• Application: Multimedia Processing.
• Has two CPUs.• master: MIPS PR3940• slave : Trimedia TM32
• Has three buses.
• Memory controller for external DRAM interface and DMA units for each CPU.
• Can execute many OS including, Windows CE, Linux, VxWorks.
• CPUs share same resources and use semaphores to negotiate ownership of shared resources.
13

4. TI OMAP 5912
• Application: Cell phone Processor.
• Designed to support 2.5G and 3G wireless applications.
• In addition to basic voice services, it is intended for speech processing, location-based services, security, gaming, and multimedia.
• Has two CPUs: an ARM9 and a TMS320C55x digital signal processor (DSP)
• C55x DSP performs signal processing as slave.
• ARM runs operating system, dispatches tasks to DSP.
• SRAM capacity: 192 KB14

5. STMicro Nomadik
•Designed for mobile multimedia.• Accelerators built around MMDSP+ core:
• One instruction per cycle.• 16- and 24-bit fixed-point, 32-bit floating-point.
• Host Processor : ARM926EJ• Two programmable accelerators on the bus.• Video Accelerator is a heterogeneous MP
Video accelerator Audio accelerator15
Moore’s Law
16
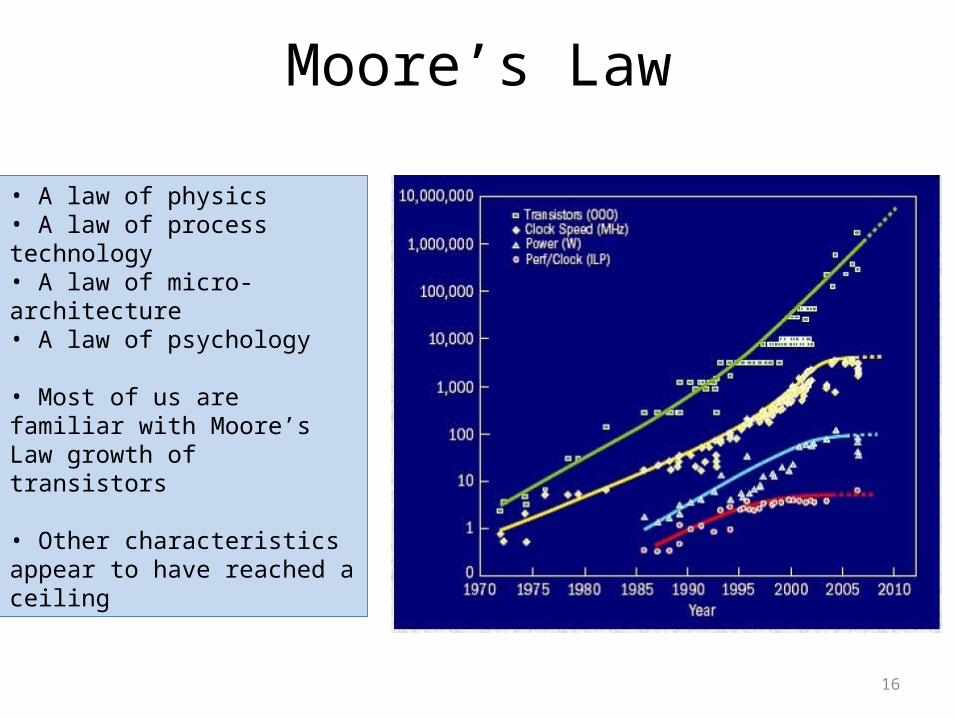
• A law of physics• A law of process technology• A law of micro-architecture• A law of psychology
• Most of us are familiar with Moore’s Law growth of transistors
• Other characteristics appear to have reached a ceiling

Multiprocessors: Implementation Technology concerns(billion-transistor CMOS implementation technology)
• Design Issues.– Transistor gate delay – Interconnect delay* – Exponential increase in processor clock rates
• Result of these trends.• Design Complexity.
17

UltraSparc Niagra
18
• 8 CPU Cores• Only a single floating point Unit
• 4 DDR2 Busses
• 4-way L2 Cache
• Built in self-test
• Operated at 1.4 GHz
• Capable of processing up to 32 concurrent threads.
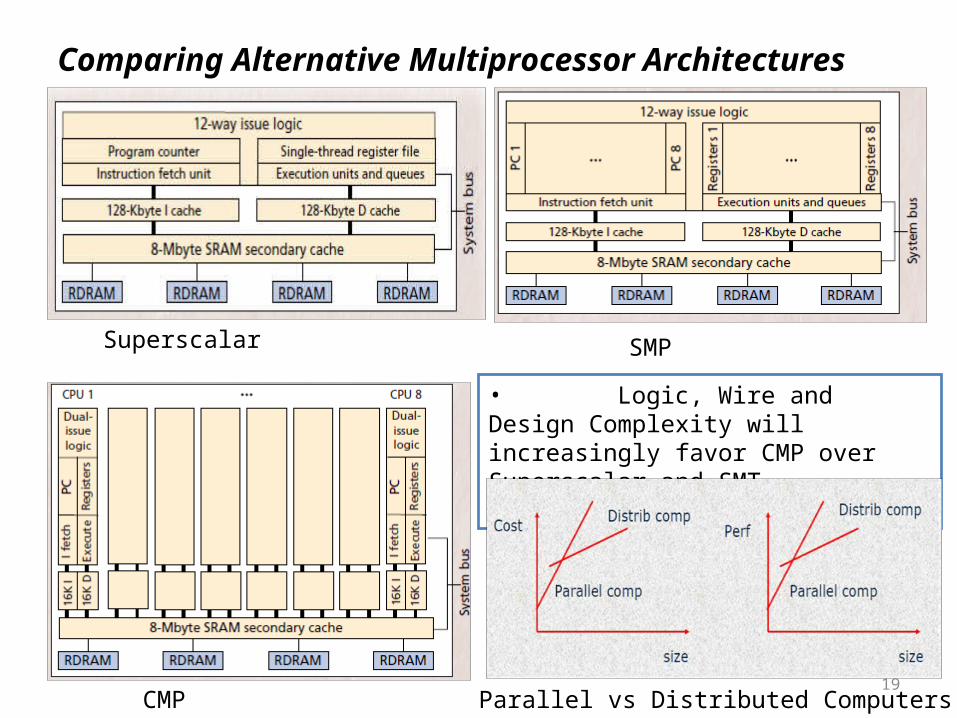
Comparing Alternative Multiprocessor Architectures
Superscalar SMP
CMP
• Logic, Wire and Design Complexity will increasingly favor CMP over Superscalar and SMT implementations.
Parallel vs Distributed Computers19
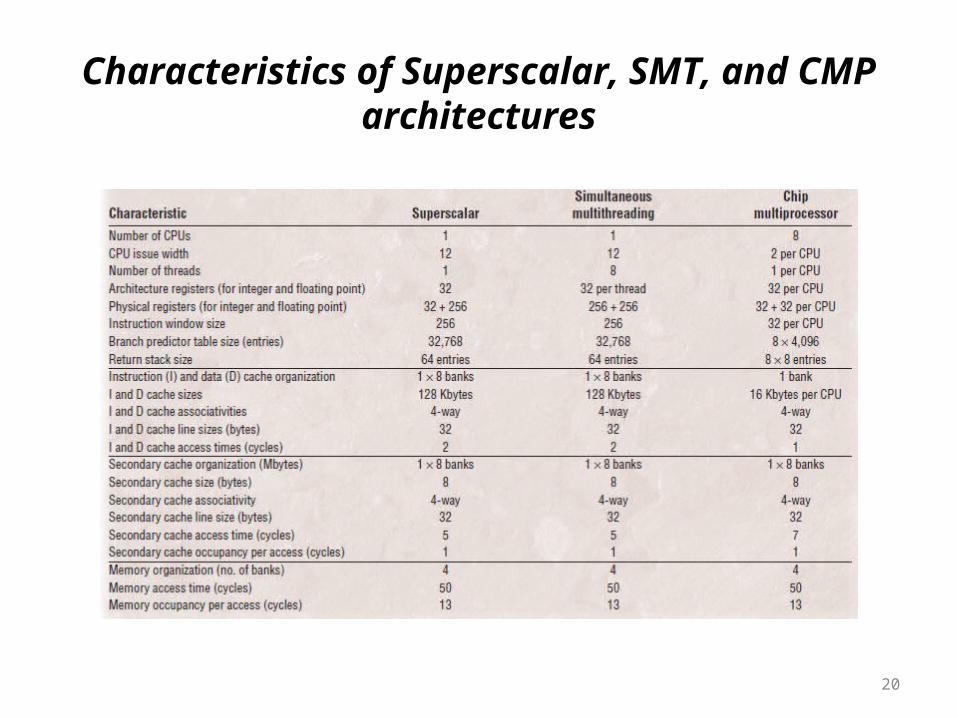
Characteristics of Superscalar, SMT, and CMP architectures
20

How to use increasing TransistorsYear Processor Transistors Feature
sizeData Width
Frequency Features
1971 4004 2300 104nM 4 740 KHz First Microprocessor
1978 8086 29000 3000nM 16 10MHz IBM PC/AT
1985 80386 275000 1000nM 32 33MHZ Pipelining
1989 80486 1200000 800nM 32 100MHz Integral FPU
1993 Pentium 3100000 800nM 32 150 MHz On-Chip L1 Cache; Superscalar
1995 Pentium Pro
5500000 600nM 32 200MHz Out-of-order execution
1997 Pentium MMX P55C
4500000 350nM 32 450MHz Dynamic branch prediction; MMX (SIMD) instructions
1999 Pentium III 28000000 180nM 32 1.1GHz On-chip L2 Cache
2004 Pentium 4E 125000000 90nM 32 3.8 GHz Hyper-threading
2006 Xeon Tulsa 167000000 65nM 64 3.4 GHz Dual-Core
2010 Xeon 7500 Nehalem
2300000000 45nM 64 2.26GHz Eight-Cores 21

Multi-nonsense
• Multi-core was a solution to a performance problem• Hardware works sequentially• Make the hardware simple – thousands of cores• Do in parallel at a slower clock rate to save power• ILP is dead• Examine what is (rather than what can be)• Communication: off-chip hard, on-chip easy• Abstraction is a pure good• Programmers are all dumb and need to be protected• Thinking in parallel is hard
22

Power and Memory considerations
23

Performance Improvements
24
• Computer Engineers improve performance through the reduction of C/I
•I/P is the domain of CS – writing software•S/C is the domain of EE/VLSI – IC fabrication
• CPI or C/I is improved through getting more instructions done in each cycle
• This means doing work in parallel distributed across the functional units of the IC

How Applications Influence Architecture
MPEG-2 encoder
• Complex Applications•Nature of the computations• Eg. MPEG-2 encoder.• Memory bandwidth requirements of an encoder vary across the block diagram.
25
• Standard based design• Many high-volume markets are standards-driven:
• wireless• multimedia• networking.
• Standard defines the basic I/O requirements.• Real time operation.• Low power/energy operation.
• Standards committees often provide reference implementations ( very single threaded).
Platform based design• What is a Platform?
A partial design:– for a particular type of system– includes embedded processor(s), may include embedded software– customizable to a customer’s requirements:
• software• component changes
• Why Platforms?Any given space has a limited number of good solutions to its basic problems.
– A platform captures the good solutions to the important design challenges in that space.
– A platform reuses architectures.
• Standards encourage platform-based design.26
Alternative to platforms
• General-purpose architectures.– May require much more area to accomplish
the same task.– Often much less energy-efficient.
• Reconfigurable systems.– Good for pieces of the system, but tough to
compete with software for miscellaneous tasks.
Xilinx
Intel
27

Platform vs. full-custom• Platform has many fewer degrees of freedom:
– harder to differentiate– can analyze design characteristics.
• Full-custom:– extremely long design cycles– may use less aggressive design styles if you can’t
reuse some pieces.
• Costs of platform-based design– Masks.– design of the platform + customization.– Design verification. 28

Platform based Design (reduces cost)
• Divide system design into 2 phases• design a platform for a class of applications• adapt the platform for a particular product in that application space
• Homogeneous MP vs Heterogeneous MP
• Examples of platforms: • Data rate• Power and energy consumption• Buffering and Memory Management
• Product Design -- S/W Driven (Customization)
• Usefulness of platform depends largely on the quality and capabilities of the SDE.
29

Architectures for Real-time Low-Power Systems
30
• Performance and Power efficiency• Benchmarks: high-performance data networking, voice recognition, video compression/ decompression, and other applications
Power consumption trends for desktop processors from Austin et al. [Aus04] 2004 IEEE Computer Society

Architectures for Real-time Low-Power Systems (contd.)
• Real-Time Performance– Homogeneous Architecture – Heterogeneous Architecture– Eg. Shared Memory MP– Software methods to eliminate conflicts.
• Application Structure– Homogeneous vs Heterogeneous Architecture
31
CAD Challenges in MPSoCs
1. Configurable processors and instruction set synthesis.
• CPU configuration ( tools that generate a HDL)• Coarse grained and fine grained instruction ext.• Eg. MIMOLA, LISA, Tensilica Xtensa.• Instruction set synthesis• 1% rule [ Holmer and Despain]
32
CAD Challenges in MPSoCs (contd.)
2. Encoding• Signal Encoding improves area & power consumption.• Eg. Code Compression [ Wolfe and Chanin (Huffman)]
and bus encoding.• Data Compression (more complex)• Eg. Lempel- Ziv Compression (L3 - MM)• Bus-Invert Coding (Stan and Burleson)
33

CAD Challenges in MPSoCs (contd.)
3. Interconnect-driven design• Early SoCs were driven by design approach.• Interconnect choices are based on conventional bus concepts.• Bus? (Single set of wires shared among multiple devices)• Best known SoC buses : ARM AMBA, IBM CoreConnect.• Growth in complexity of SoCs (Communication Bottleneck)• Network on chip (NoC)• Use a hierarchical N/W with routers for data communication• Single shared Bus vs Multiple Communication Channels• Eg. Sonics SiliconBackplane (TDMA style interconnection n/w)
34
CAD Challenges in MPSoCs (contd.)
4. Memory system optimizations• Cache : everything ( placement, replacement,
allocation and WB) is managed by hardware.• vs Scratchpad: everything is managed by software.• Servers, general purpose systems use caches.• Scratchpad provides predictability of hits/ misses.• Important for ensuring real time property.• Complexity increases with applications.• Worst case time is more tightly bound.
35

CAD Challenges in MPSoCs (contd.)
5. Hardware/ Software Codesign• Used to explore design space of heterogeneous MP• Cost estimation ( area, power & performance)
6. SDEs• SDEs for single processors ( commercial and open-source)• No comparable retargeting technology for multiprocessors• MPSoC development environments tend to be a collection
of tools. ( no substantial connection)• Difficult to determine the true state of the system.
36

Conclusion• MPSoCs are an important chapter in the
history of multiprocessing• System Designers like uniprocessors with
sufficient computation power.• DSPs (Audio Processing)• Von Neumann architecture supports
traditional software development tools• Computational power (Moore’s Law) vs low –
power, low- cost, real time requirements.37