
Projective 2D geometry course 2 Multiple View Geometry Comp 290-089 Marc Pollefeys.
date post
22-Dec-2015Category
view
227download
0
Multiple View Geometry
THE GEOMETRY OF MULTIPLE VIEWS
Reading: Chapter 10.
• Epipolar Geometry
• The Essential Matrix
• The Fundamental Matrix
• The Trifocal Tensor
• The Quadrifocal Tensor
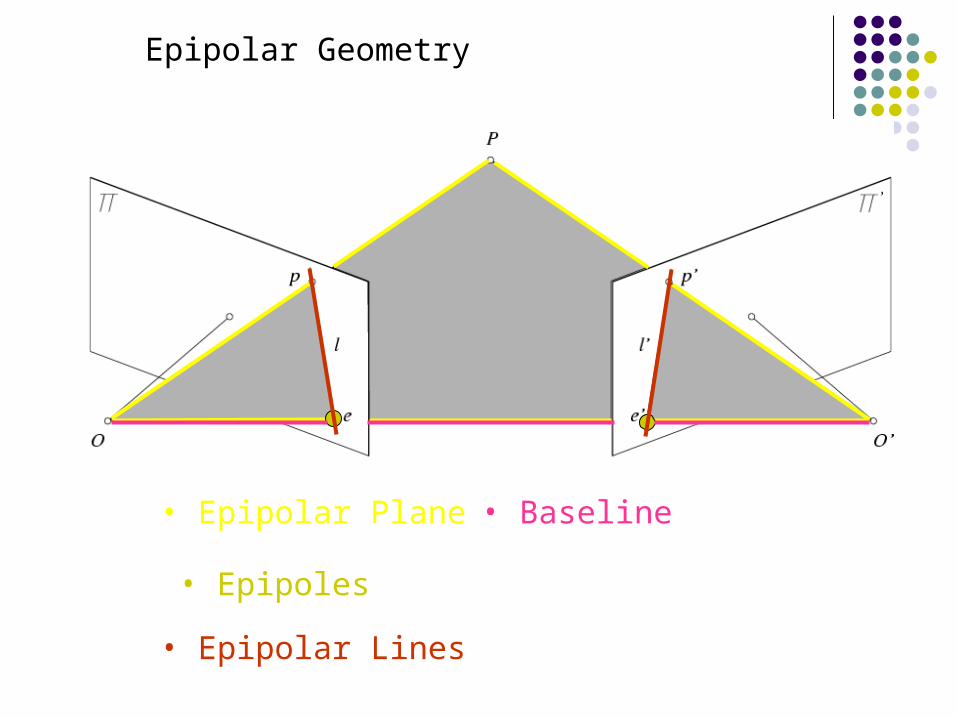
Epipolar Geometry
• Epipolar Plane
• Epipoles
• Epipolar Lines
• Baseline
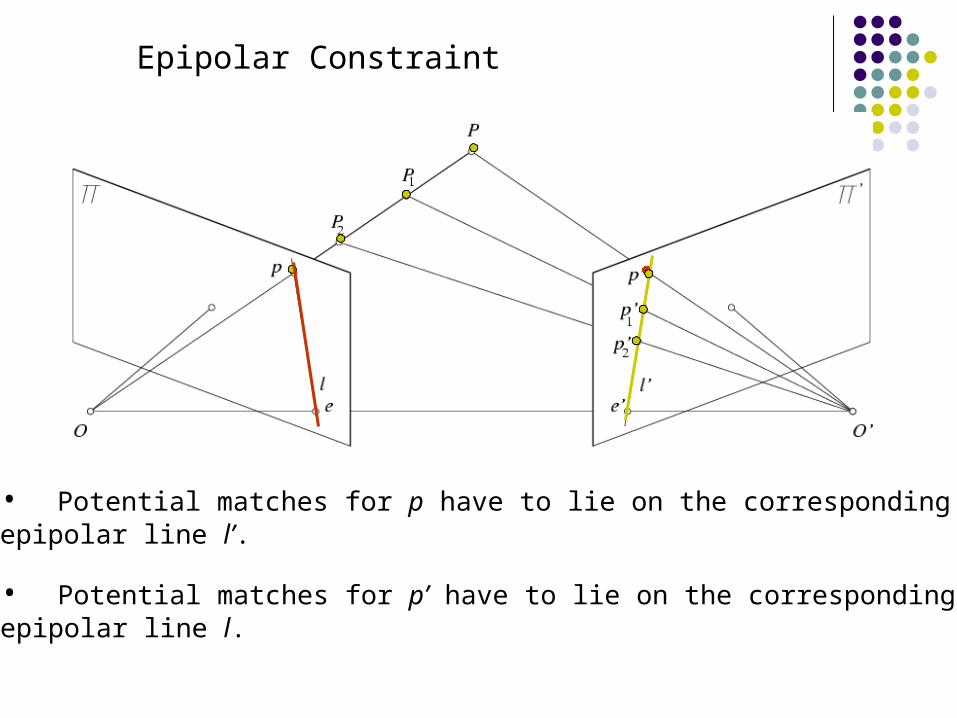
Epipolar Constraint
• Potential matches for p have to lie on the corresponding epipolar line l’.
• Potential matches for p’ have to lie on the corresponding epipolar line l.
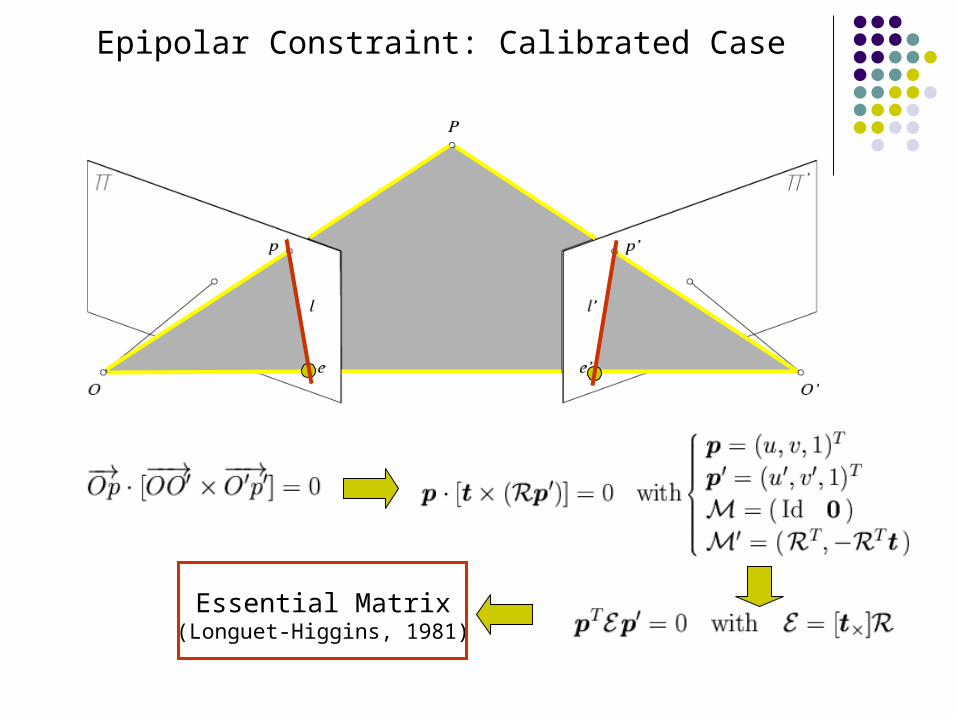
Epipolar Constraint: Calibrated Case
Essential Matrix(Longuet-Higgins, 1981)
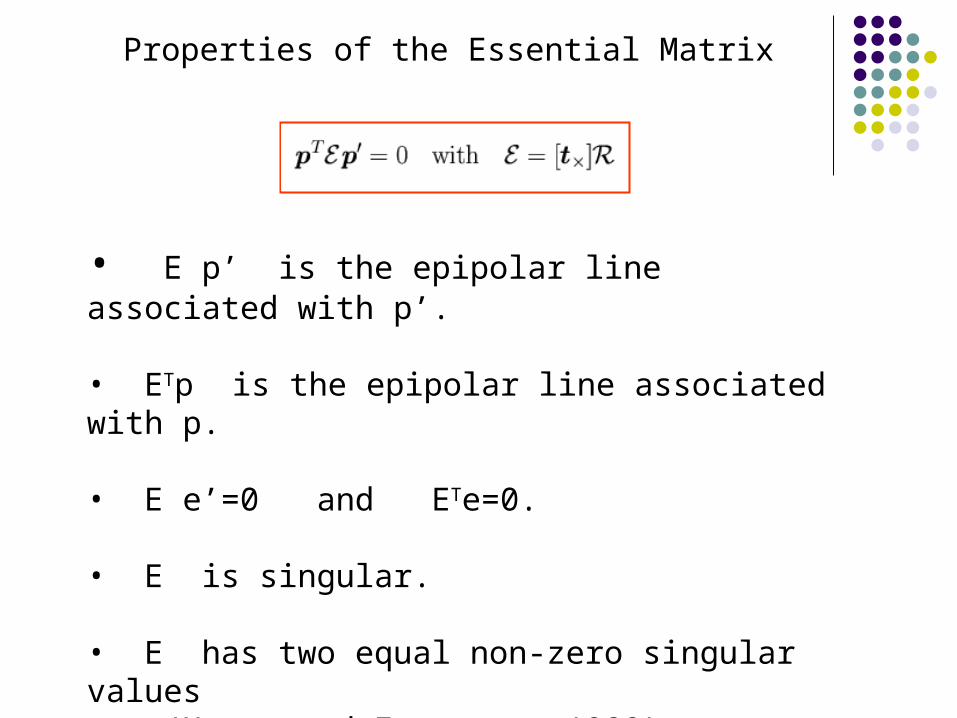
Properties of the Essential Matrix
• E p’ is the epipolar line associated with p’.
• ETp is the epipolar line associated with p.
• E e’=0 and ETe=0.
• E is singular.
• E has two equal non-zero singular values (Huang and Faugeras, 1989).
T
T
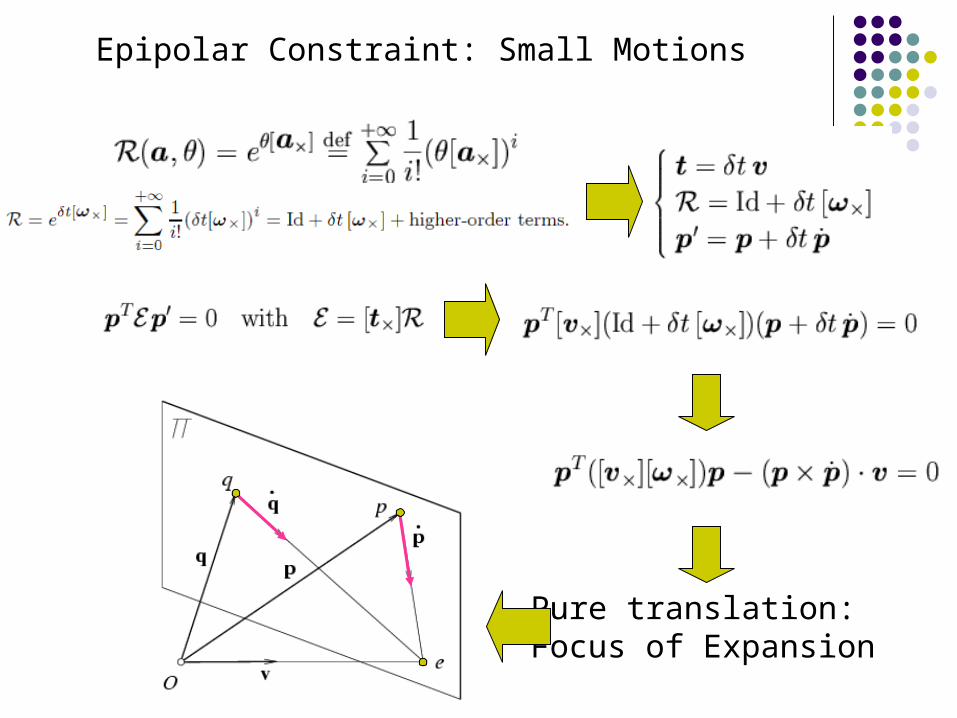
Epipolar Constraint: Small MotionsTo First-Order:
Pure translation:Focus of Expansion
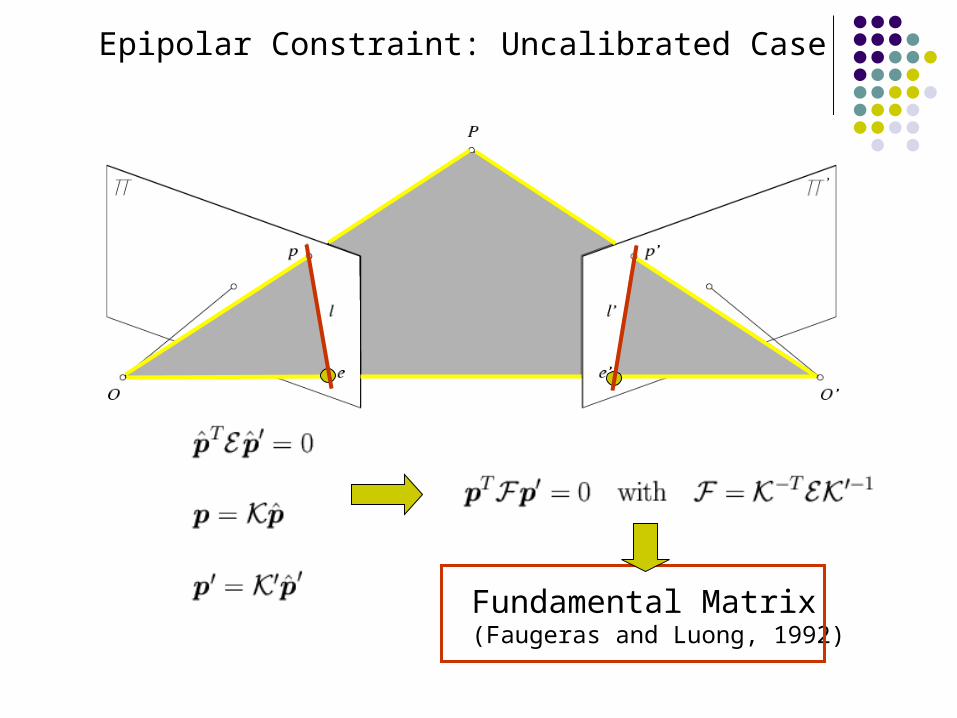
Epipolar Constraint: Uncalibrated Case
Fundamental Matrix(Faugeras and Luong, 1992)
Properties of the Fundamental Matrix
• F p’ is the epipolar line associated with p’.
• FT p is the epipolar line associated with p.
• F e’=0 and FT e=0.
• F is singular.
T
T
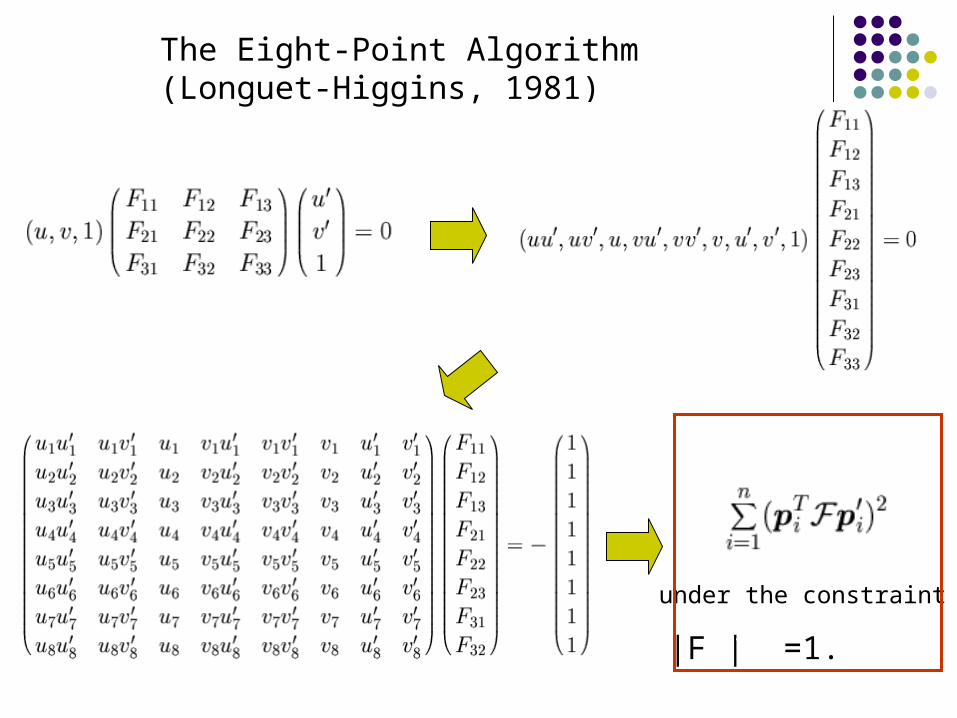
The Eight-Point Algorithm (Longuet-Higgins, 1981)
|F | =1.
Minimize:
under the constraint
2
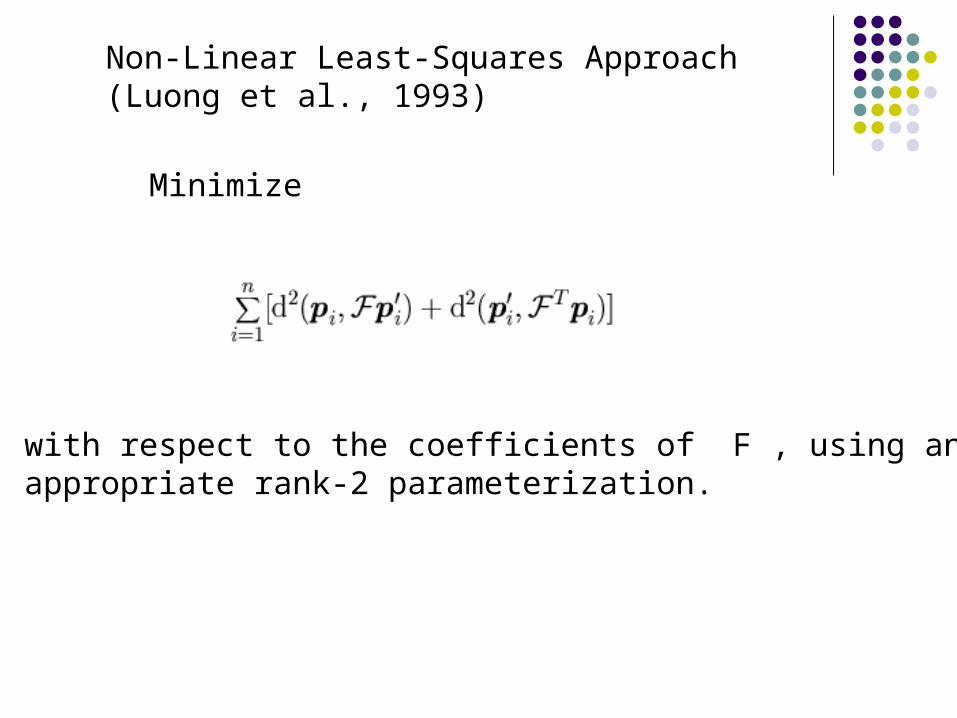
Non-Linear Least-Squares Approach (Luong et al., 1993)
Minimize
with respect to the coefficients of F , using an appropriate rank-2 parameterization.
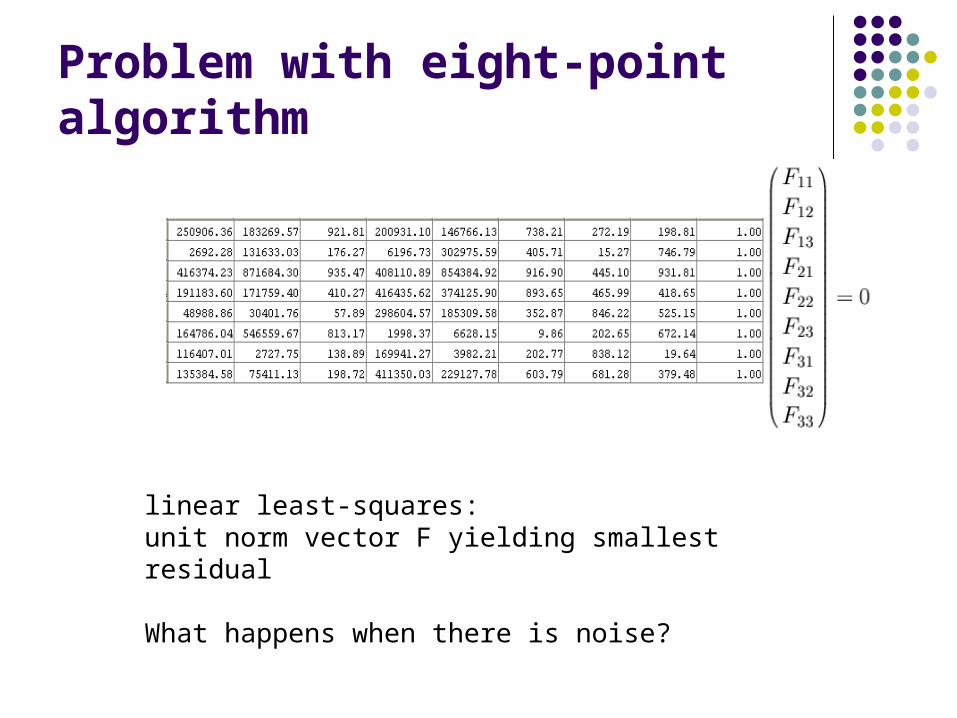
Problem with eight-point algorithm
linear least-squares: unit norm vector F yielding smallest residual
What happens when there is noise?

The Normalized Eight-Point Algorithm (Hartley, 1995)
• Center the image data at the origin, and scale it so themean squared distance between the origin and the data points is sqrt(2) pixels: q = T p , q’ = T’ p’.
• Use the eight-point algorithm to compute F from thepoints q and q’ .
• Enforce the rank-2 constraint.
• Output T F T’.T
i i i i
i i
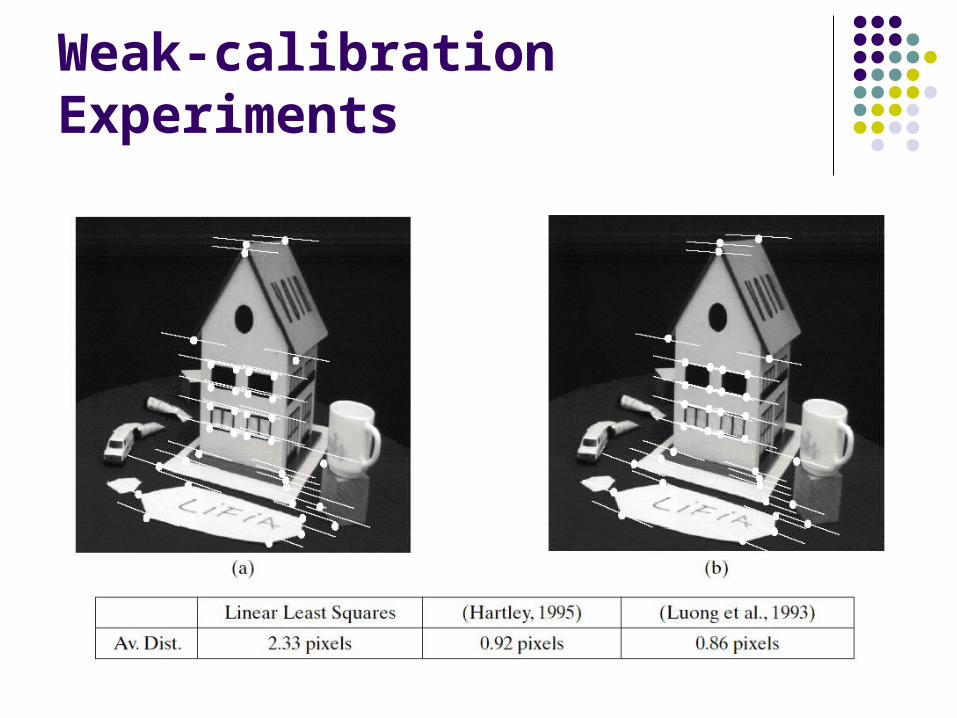
Weak-calibration Experiments

Epipolar geometry example

Example: converging cameras
courtesy of Andrew Zisserman
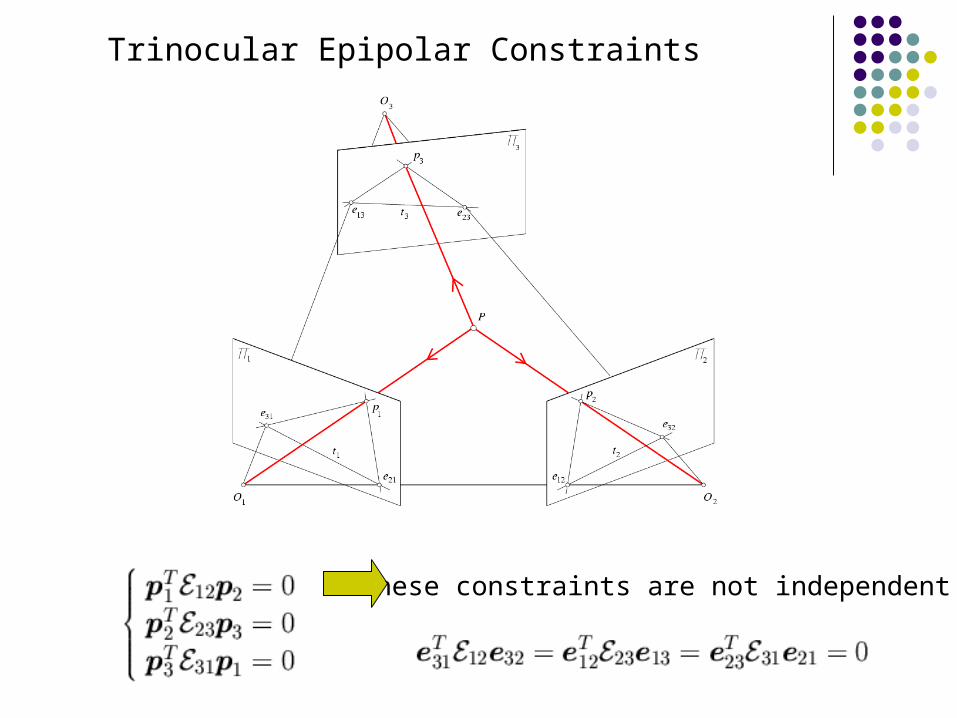
Trinocular Epipolar Constraints
These constraints are not independent!
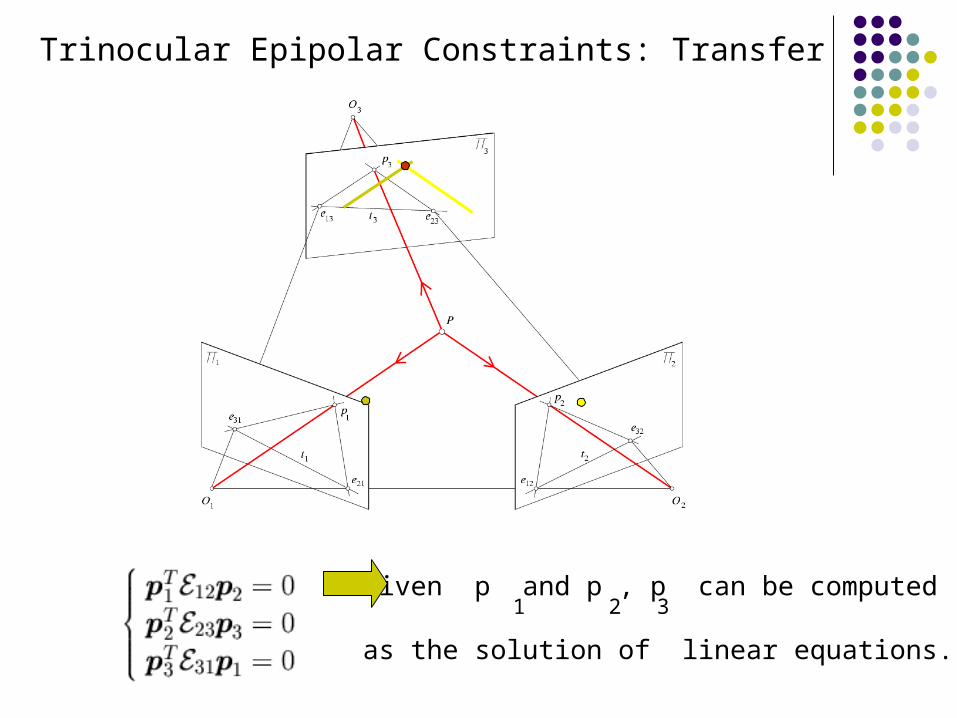
Trinocular Epipolar Constraints: Transfer
Given p and p , p can be computed
as the solution of linear equations.
1 2 3
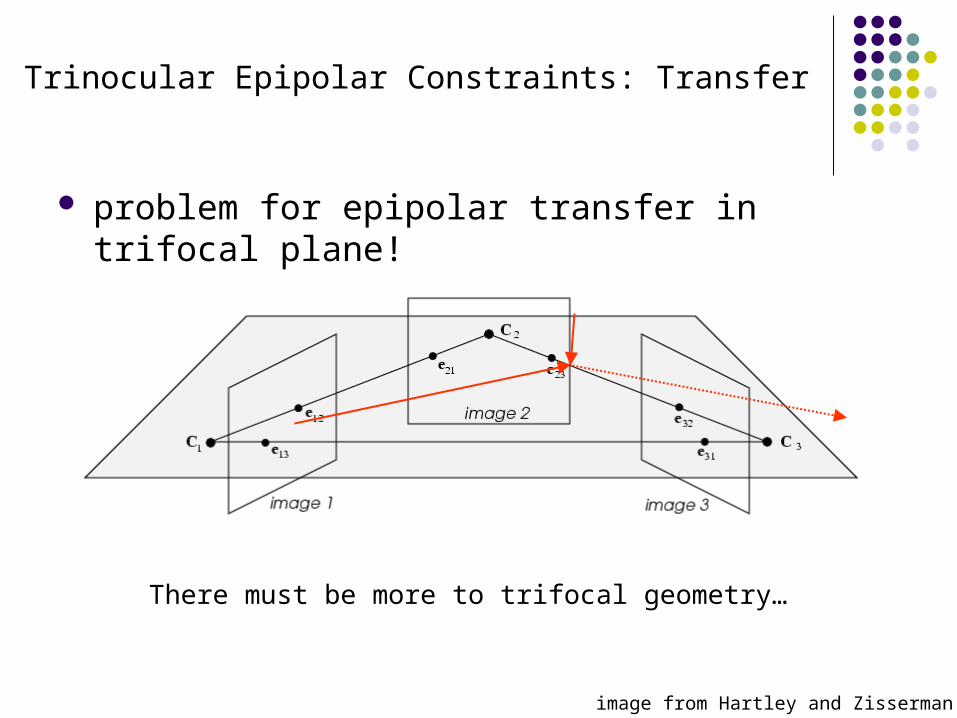
problem for epipolar transfer in trifocal plane!
image from Hartley and Zisserman
Trinocular Epipolar Constraints: Transfer
There must be more to trifocal geometry…

Trifocal Constraints
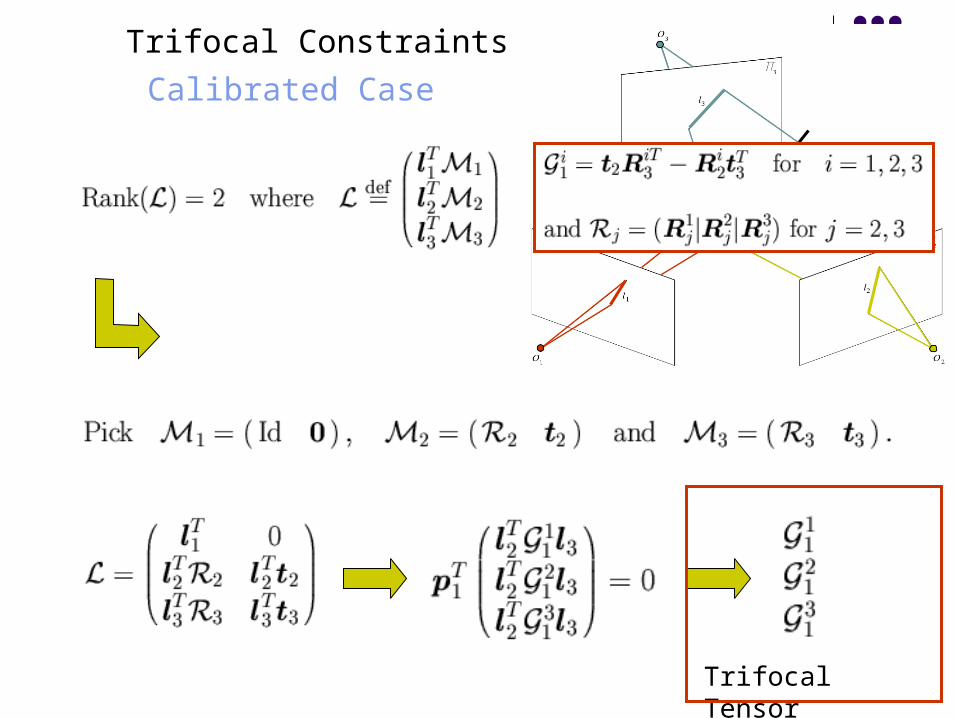
Trifocal Constraints
All 3x3 minorsmust be zero!
Calibrated Case
Trifocal Tensor
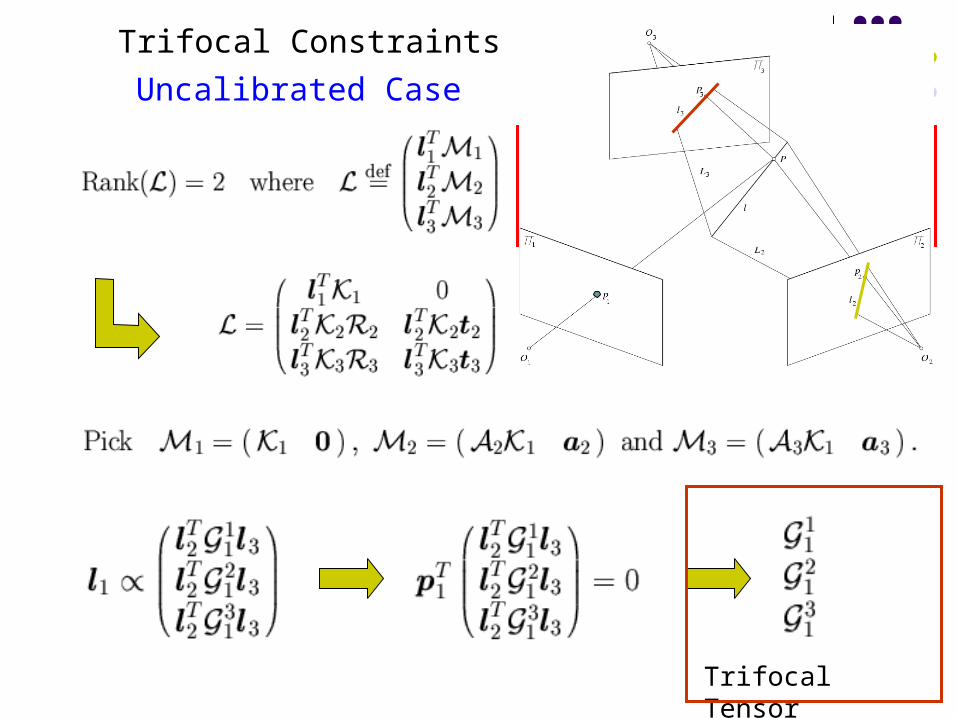
Trifocal Constraints
Uncalibrated Case
Trifocal Tensor
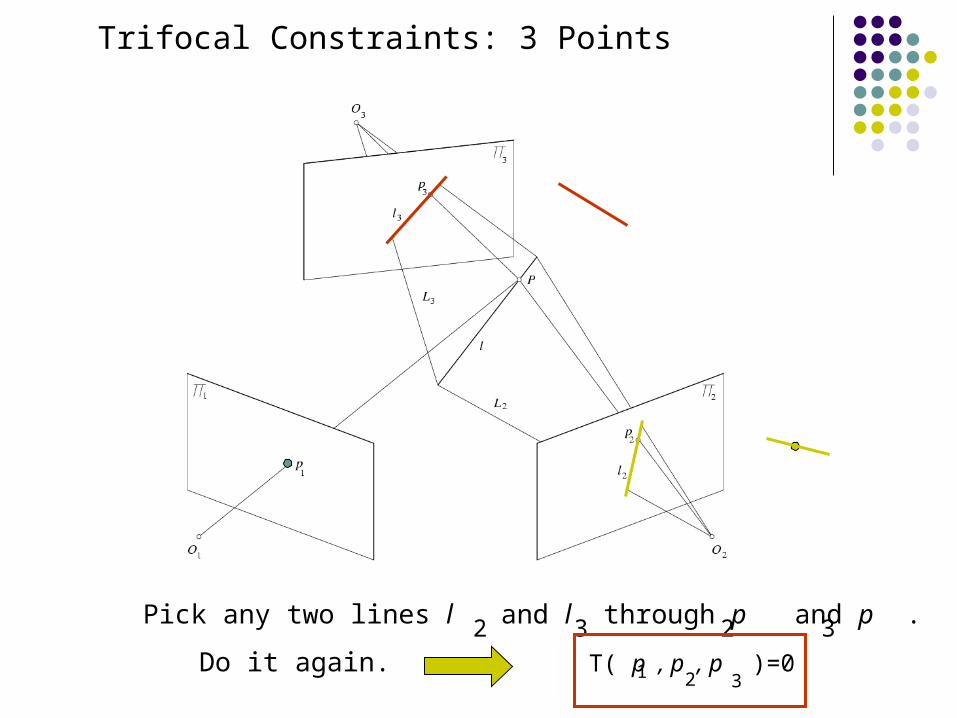
Trifocal Constraints: 3 Points
Pick any two lines l and l through p and p .
Do it again.2 3 2 3
T( p , p , p )=01 2 3
Properties of the Trifocal Tensor
Estimating the Trifocal Tensor
• Ignore the non-linear constraints and use linear least-squares
• Impose the constraints a posteriori.
• For any matching epipolar lines, l G l = 0.
• The matrices G are singular.
• They satisfy 8 independent constraints in theuncalibrated case (Faugeras and Mourrain, 1995).
2 1 3T i
1i
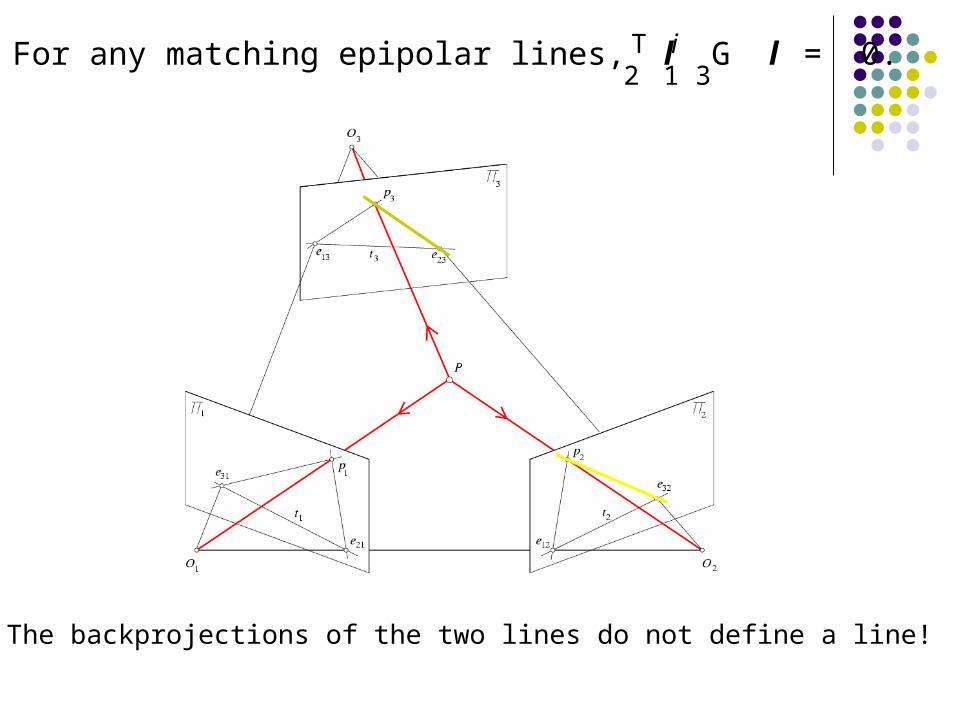
For any matching epipolar lines, l G l = 0. 2 1 3T i
The backprojections of the two lines do not define a line!
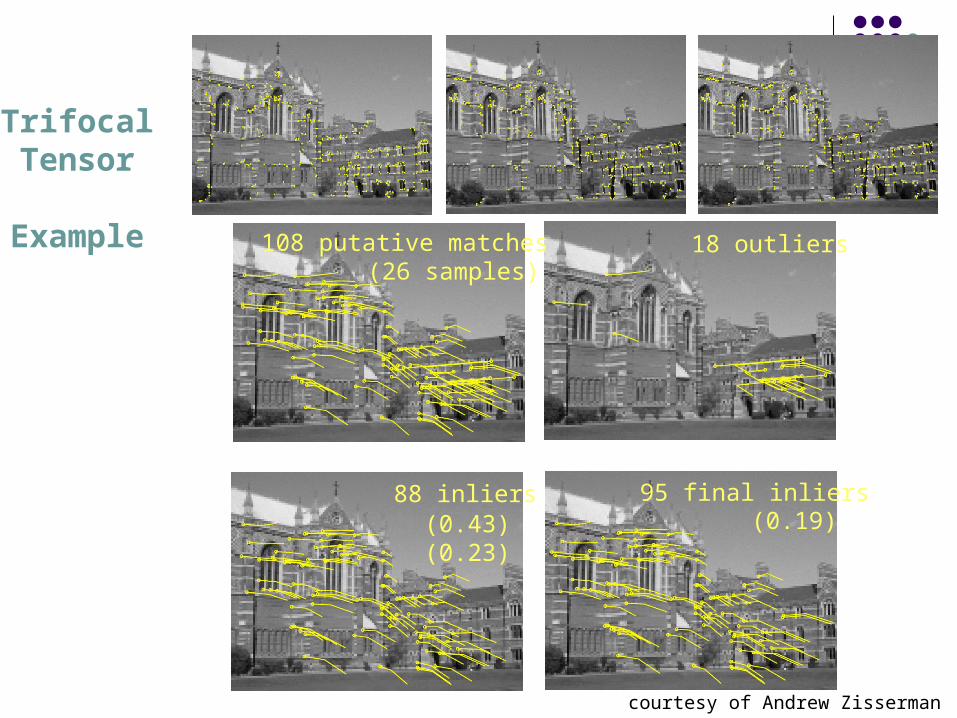
108 putative matches 18 outliers
88 inliers 95 final inliers
(26 samples)
(0.43)(0.23)
(0.19)
TrifocalTensor
Example
courtesy of Andrew Zisserman
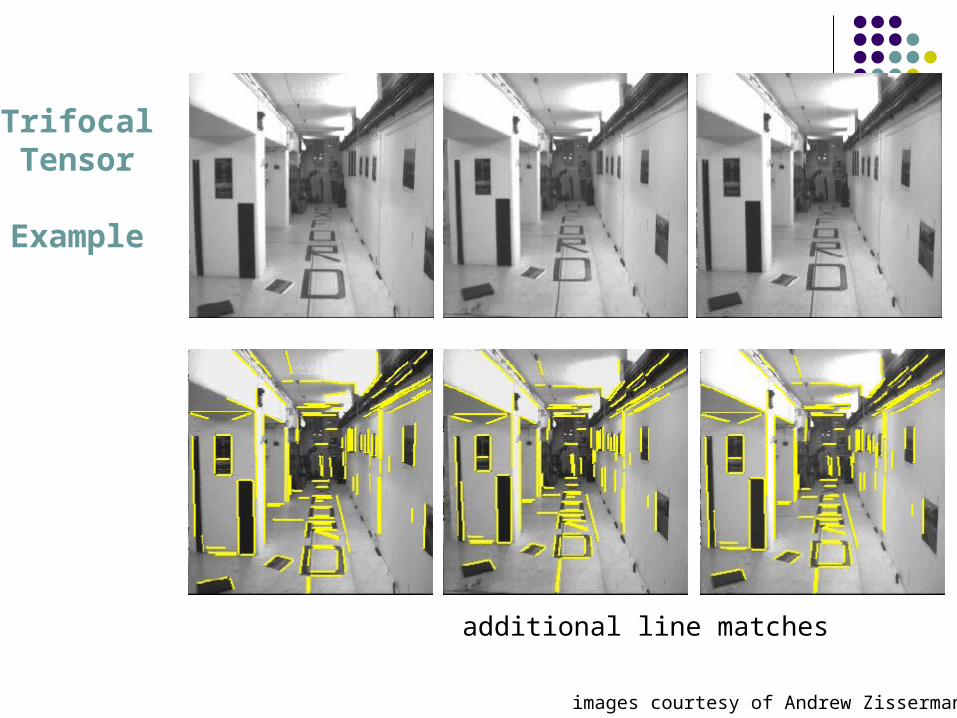
additional line matches
TrifocalTensor
Example
images courtesy of Andrew Zisserman

Transfer: trifocal transfer
doesn’t work if l’=epipolar line
image courtesy of Hartley and Zisserman
(using tensor notation)
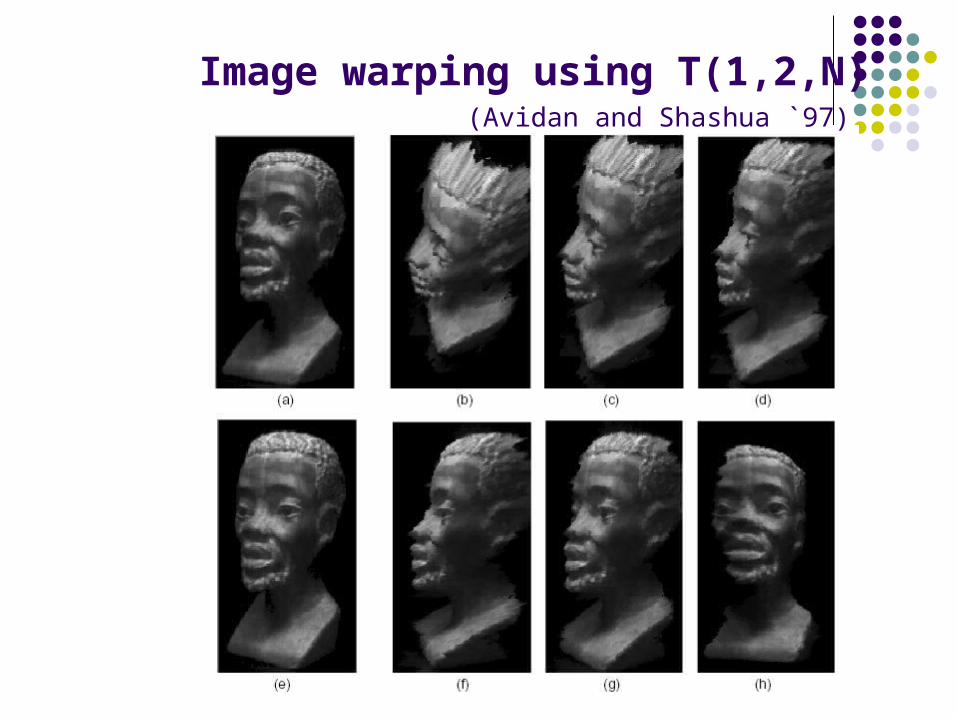
Image warping using T(1,2,N)(Avidan and Shashua `97)
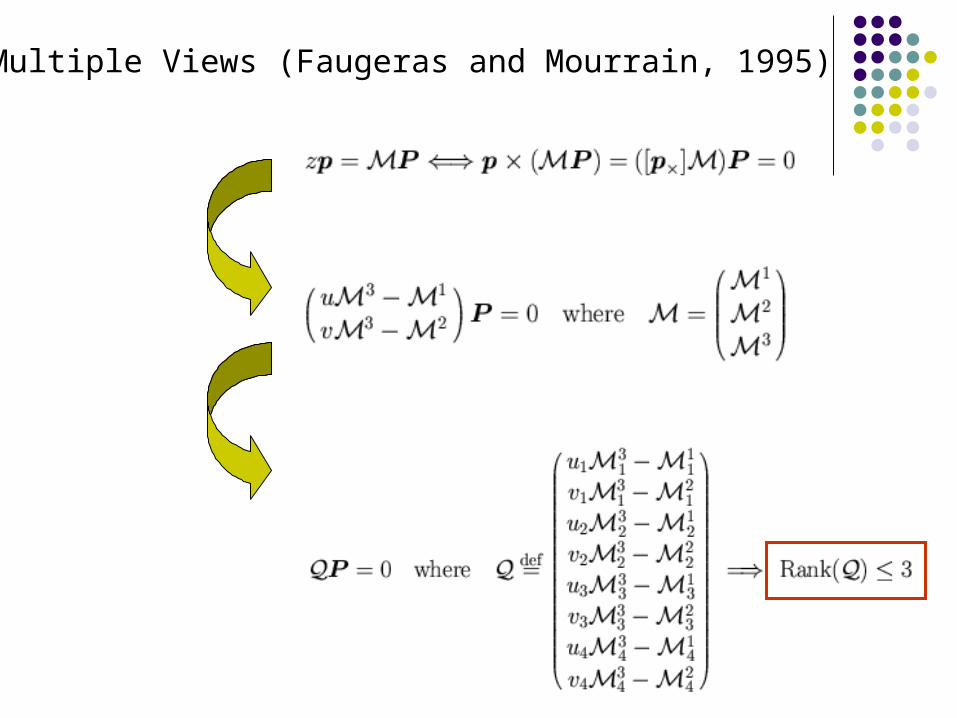
Multiple Views (Faugeras and Mourrain, 1995)
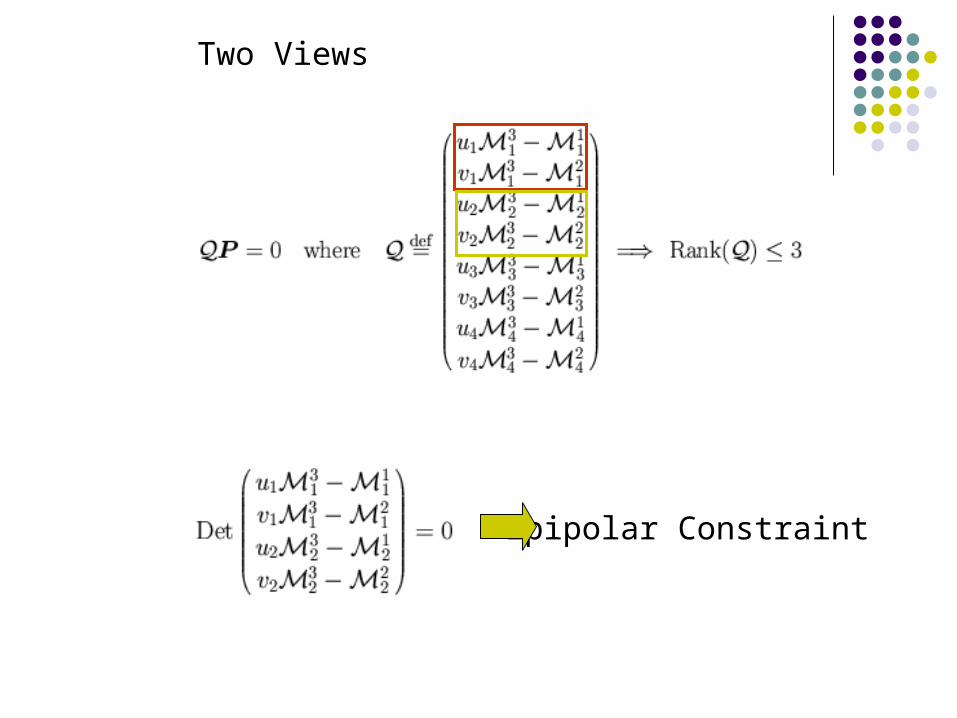
Two Views
Epipolar Constraint

Three Views
Trifocal Constraint
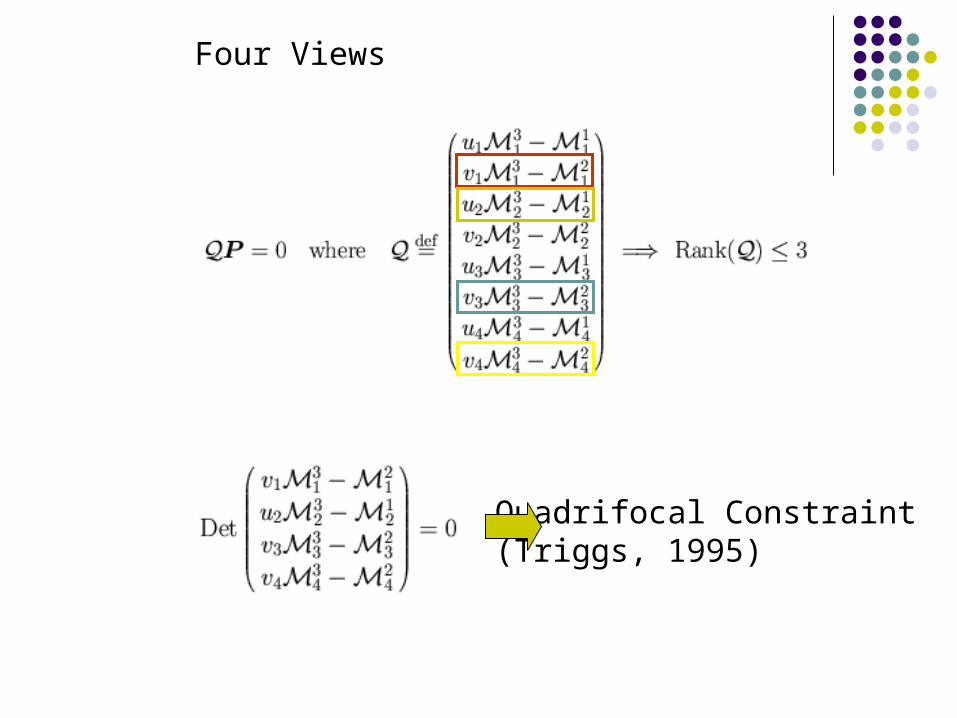
Four Views
Quadrifocal Constraint(Triggs, 1995)
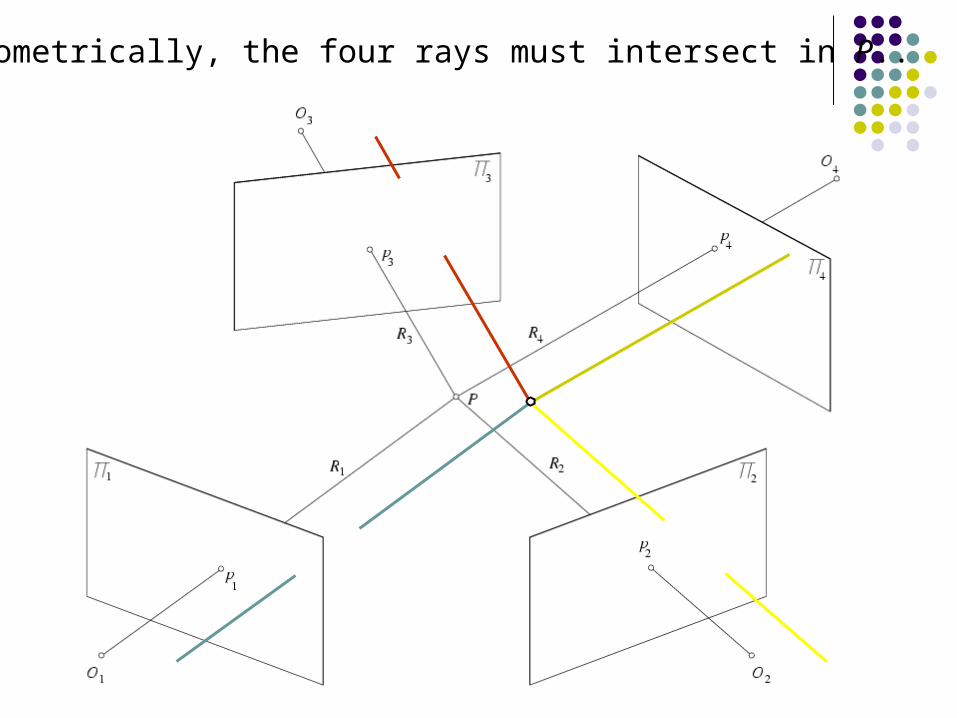
Geometrically, the four rays must intersect in P..
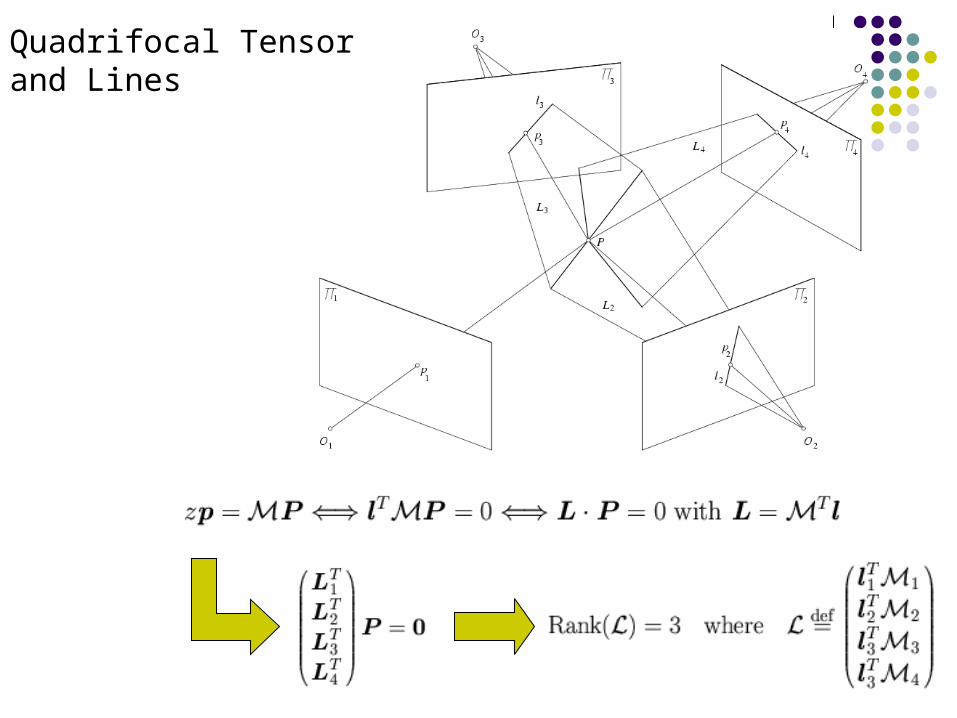
Quadrifocal Tensorand Lines
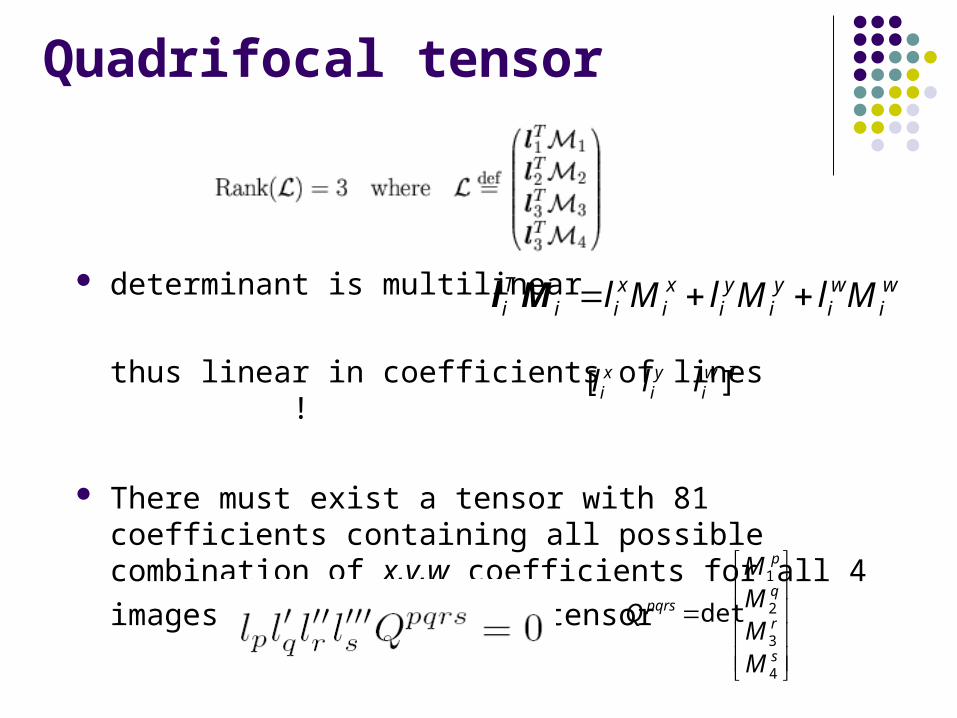
Quadrifocal tensor
determinant is multilinear
thus linear in coefficients of lines !
There must exist a tensor with 81 coefficients containing all possible combination of x,y,w coefficients for all 4
images: the quadrifocal tensor
wi
wi
yi
yi
xi
xii
Ti MlMlMl Ml
Twi
yi
xi lll ][
s
r
q
p
pqrs
MMMM
Q
4
3
2
1
det


















