Multidepot UAV Routing Problem with Weapon Configuration ...
16
Research Article Multidepot UAV Routing Problem with Weapon Configuration and Time Window Tianren Zhou, 1 Jiaming Zhang, 1 Jianmai Shi , 1,2 Zhong Liu, 1 and Jincai Huang 1 1 Science and Technology on Information Systems Engineering Laboratory, National University of Defense Technology, Changsha 410073, China 2 School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China Correspondence should be addressed to Jianmai Shi; [email protected] Received 23 January 2018; Accepted 15 April 2018; Published 23 May 2018 Academic Editor: Juan-Antonio Escareno Copyright © 2018 Tianren Zhou et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In recent wars, there is an increasing trend that unmanned aerial vehicles (UAVs) are utilized to conduct military attacking missions. In this paper, we investigate a novel multidepot UAV routing problem with consideration of weapon configuration in the UAV and the attacking time window of the target. A mixed-integer linear programming model is developed to jointly optimize three kinds of decisions: the weapon configuration strategy in the UAV, the routing strategy of target, and the allocation strategy of weapons to targets. An adaptive large neighborhood search (ALNS) algorithm is proposed for solving the problem, which is tested by randomly generated instances covering the small, medium, and large sizes. Experimental results confirm the effectiveness and robustness of the proposed ALNS algorithm. 1. Introduction With the development of information technologies, artificial intelligence, and new materials, as well as their wide appli- cation in unmanned aerial vehicles (UAVs), the abilities of UAVs on autonomously flying, endurance, and stealth have been greatly improved. ere are many advantages of UAVs to conduct military operations, such as low cost, high agility, good stealth, and no risk of casualties. us, in several recent local wars, there was an increasing trend to employ UAVs for completing military missions. During the Gulf War [1, 2], the US army deployed the “Pioneer” and the “Pointer” UAVs to conduct military tasks, such as battlefield reconnaissance, surveillance, artillery support, and target damage assessment. In the Kosovo war [3, 4], NATO employed over 200 UAVs during the war. In the Afghanistan war [5], the UAV named “Global Hawk” was used to directly destroy enemy targets. e outstanding performance of UAVs in current wars has proved their military value, and more UAVs are introduced and used to replace manned aircraſts for carrying out various military missions. When UAVs are used to perform attack missions on enemy targets, commanders need to consider the constraints on UAV load and the hanging points for weapons and should determine the type and quantity of weapons equipped in the UAV while optimizing the flight path for visiting the targets. In the UAV mission planning process, commanders also have to determine the type and quantity of weapons that the UAV delivers to each target, ensuring that these weapons can cause sufficient damage on the target and meet the mission’s damage requirements. Modern wars are usually joint operations of multiple services (army, navy, air force, etc.), and there are many cooperative actions among different military units. us, for most of the targets attacked by UAVs, the attacking actions are required to complete in specific time windows. In the military operations research field, most literatures related to UAV mission planning focused on task assignment, path planning, and routing separately. To the best of our knowledge, the UAV routing problem with weapon configuration and time window has not been studied. e UAV routing problems were usually solved based on models and algorithms utilized in vehicle routing problem (VRP). e weapon configuration in the UAV and allo- cation to the targets are quite different from the product delivery to customer in the common VRP. For a target, the attacking effect is different if it is attacked by different Hindawi Journal of Advanced Transportation Volume 2018, Article ID 7318207, 15 pages https://doi.org/10.1155/2018/7318207
Transcript of Multidepot UAV Routing Problem with Weapon Configuration ...

Research ArticleMultidepot UAV Routing Problem withWeapon Configuration and Time Window
Tianren Zhou1 Jiaming Zhang1 Jianmai Shi 12 Zhong Liu1 and Jincai Huang 1
1Science and Technology on Information Systems Engineering Laboratory National University of Defense TechnologyChangsha 410073 China2School of Traffic and Transportation Engineering Central South University Changsha 410075 China
Correspondence should be addressed to Jianmai Shi jianmaishigmailcom
Received 23 January 2018 Accepted 15 April 2018 Published 23 May 2018
Academic Editor Juan-Antonio Escareno
Copyright copy 2018 Tianren Zhou et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In recentwars there is an increasing trend that unmanned aerial vehicles (UAVs) are utilized to conductmilitary attackingmissionsIn this paper we investigate a novel multidepot UAV routing problem with consideration of weapon configuration in the UAV andthe attacking time window of the target A mixed-integer linear programming model is developed to jointly optimize three kindsof decisions the weapon configuration strategy in the UAV the routing strategy of target and the allocation strategy of weapons totargets An adaptive large neighborhood search (ALNS) algorithm is proposed for solving the problem which is tested by randomlygenerated instances covering the small medium and large sizes Experimental results confirm the effectiveness and robustness ofthe proposed ALNS algorithm
1 Introduction
With the development of information technologies artificialintelligence and new materials as well as their wide appli-cation in unmanned aerial vehicles (UAVs) the abilities ofUAVs on autonomously flying endurance and stealth havebeen greatly improved There are many advantages of UAVsto conduct military operations such as low cost high agilitygood stealth and no risk of casualties Thus in several recentlocal wars there was an increasing trend to employ UAVsfor completing military missions During the Gulf War [1 2]the US army deployed the ldquoPioneerrdquo and the ldquoPointerrdquo UAVsto conduct military tasks such as battlefield reconnaissancesurveillance artillery support and target damage assessmentIn the Kosovo war [3 4] NATO employed over 200 UAVsduring the war In the Afghanistan war [5] the UAV namedldquoGlobal Hawkrdquo was used to directly destroy enemy targetsThe outstanding performance of UAVs in current wars hasproved their military value and more UAVs are introducedand used to replace manned aircrafts for carrying out variousmilitary missions
When UAVs are used to perform attack missions onenemy targets commanders need to consider the constraints
on UAV load and the hanging points for weapons and shoulddetermine the type and quantity of weapons equipped inthe UAV while optimizing the flight path for visiting thetargets In the UAV mission planning process commandersalso have to determine the type and quantity of weaponsthat the UAV delivers to each target ensuring that theseweapons can cause sufficient damage on the target and meetthe missionrsquos damage requirements Modern wars are usuallyjoint operations of multiple services (army navy air forceetc) and there are many cooperative actions among differentmilitary unitsThus formost of the targets attacked byUAVsthe attacking actions are required to complete in specifictime windows In the military operations research field mostliteratures related to UAV mission planning focused on taskassignment path planning and routing separately To the bestof our knowledge the UAV routing problem with weaponconfiguration and time window has not been studied
The UAV routing problems were usually solved based onmodels and algorithms utilized in vehicle routing problem(VRP) The weapon configuration in the UAV and allo-cation to the targets are quite different from the productdelivery to customer in the common VRP For a targetthe attacking effect is different if it is attacked by different
HindawiJournal of Advanced TransportationVolume 2018 Article ID 7318207 15 pageshttpsdoiorg10115520187318207
2 Journal of Advanced Transportation
Table 1 Weapon-target combat ability matrix
Small smartbomb
Small precisionguided bomb
Laser-guidedbomb
Bridge 035 065 095Communicationstation 04 055 075
weapons Table 1 presents the combat ability matrix of threedifferent weapons on two targets It can be seen that ifthe destroy requirement for the bridge target is restrictedover 90 in the mission there are a number of combinationsof weapons that can satisfy the requirement such as 3small smart bombs 1 small smart bomb 1 small precisionguided bomb and 1 laser-guided bomb Thus the weaponsdelivered to a target are not deterministic and are impactedby the weapon configuration and routing strategies of theUAV while the types and quantities of products deliveredto each customer are deterministic in the general VRPproblem
Motivated by the practical requirement in military mis-sion planning of UAV we investigated the multidepot UAVrouting problem with weapon configuration and time win-dow (MD-URP-WCampTW) which can be viewed as a newextension on the traditional VRP In MD-URP-WCampTWthree kinds of decisions should be cooperatively optimizedwhich are the weapon configuration strategy in the UAVthe routing strategy of target and the allocation strategy ofweapons to targets The interaction among these decisionsmakes the modelling and solution of the problem morecomplex In this paper a mixed-integer linear program-ming model is developed to formulate the problem anda powerful adaptive large neighborhood search (ALNS)based metaheuristic is proposed to obtain better feasiblesolutions
The paper is organized as follows In Section 2 the relatedliteratures are reviewed The formulated model is developedin Section 3 and the proposed ALNS algorithm includingits main steps is presented in Section 4 The computationalresults are reported and analyzed in Section 5 Section 6concludes the paper
2 Literature Review
Multidepot UAV routing problem with consideration ofweapon configuration and time window is related to mainstreams of literatures which are UAV path planningroutingandUAV task assignment A review of the literatures on thesetwo fields is summarized below
The earlier studies in the field of UAV flight path opti-mization mainly focused on optimizing the UAV flight pathfrom the control level It is necessary to consider the influ-ence of the turning angle obstacle avoidance and weatherconditions (such as wind power level) on the UAV Based onthese constraints an optimal flight path is found for the UAV[6] Edison and Shima [7] studied the mission planning andpath planning ofmulti-UAV inmilitary operationsThey fullyconsidered flight parameters such as the minimum turningradius in the proposed mathematical model and solved the
problem using a genetic algorithm Zhang et al [8] studiedmulti-UAV path planning considering mobility collisionavoidance and flight information sharing and proposed theCooperative and Geometric Learning Algorithm (CGLA)to solve the above problem Moon et al [9] developed amultilevel planning model for multi-UAV task assignmentand path planning taking into account practical constraintssuch as collision avoidance between UAVs and solved theproblem by the Alowast algorithm Yang et al [10] studied the pathplanning problem of UAV in terms of obstacle avoidancedecomposed the original goal and constraint function ofUAV path planning into a new set of evaluation functionsand proposed the evolutionary algorithm for solving theproblem
With the improvement in intelligent control technologyfor UAVs UAVs can independently complete the flightbetween the target points In recent years studies on UAVpath planning have begun to focus on tactical optimizationin order to minimize the overall minimum flight distance byoptimizing the sequence of UAV to visit the target Shettyet al [11] studied multi-UAV task assignment and routingproblems based on target priority and distinguished thetargets by their degrees of importance using the Tabu searchalgorithm Mufalli et al [12] studied the multi-UAV routingproblem for target reconnaissance considering the load con-straints of the UAV and solved the problem by the columngeneration and heuristic algorithm Liu et al [13] studiedthe UAV deployment and routing problem for road-trafficinformation collection Subject to the number of UAVs andthe maximum cruise distance a multiobjective optimizationmodel was developed Moyo and Plessis [14] studied theinspection path optimization problem for the cable networkof UAVs and described it as a traveling salesman problem(TSP) Guerriero et al [15] proposed a system of UAVs thatare able to communicate self-organize and cooperate Amulticriteria optimizationmodelwas developed to determinethe distributed dynamic schedule of UAVs and ensure bothspatial coverage and temporal coverage of specific targetsEvers et al [16] studied multi-UAV path planning with targetreconnaissance time windows Luo et al [17] studied thetwo-echelon routing problem of mounting UAV on a groundvehicle (GV) where the GV acts as the mobile depot forlaunching and recycling the UAV while the UAV visits thetargets for information collection
In order to facilitate multi-UAV collaborative task alloca-tion during mission planning Ghalenoei et al [18] proposedthe Discrete Invasive Weed Optimization Algorithm for spe-cific target attributes and geographical locations George etal [19] proposed an online task assignment algorithm basedon UAV task alliance to deal with unexpected tasks whichinvolves requesting adjacent UAVs to form task alliances andreplanning the tasks Zhong et al [20] studied the UAV taskassignment problem with dynamic changes in target valueover time taking into account various constraints includingUAV flight altitude maximum climb height and maximumturning radius Hu et al [21] studied the assignment ofUAV collaborative tasks using the hierarchical assignmentmethod and solved the problem by an improved ant colonyalgorithm Yin et al [22] described the UAV collaborative
Journal of Advanced Transportation 3
1 2
610
3
12
4
5
8
9
7 11
Depot
Target
Route
Figure 1 An illustration of the MD-URP-WCampTW
task assignment problem as a multiobjective optimizationproblem and solved it using a Pareto-dominated multiob-jective discrete particle swarm optimization algorithm Jin[23] studied the distributed UAV task allocation problemwhere the tasks are divided into detection attack andverification
As far as current UAV mission planning and path plan-ning studies are concerned no study has focused on theintegrated optimization of UAV flight path for target attackand airborne weapons configuration Taking into accountthe type and quantity of weapons on board during theUAV path planning process there exists a new direction fortraditional path planning which is of great significance forimproving the efficiency of UAV mission planning in themilitary
3 Model Formulation
The MD-URP-WCampTW considers a set of targets each ofwhich must be attacked once by one UAV The weaponsdelivered to the target must be able to destroy it over arequired destroy levelThere are multiple depots for the UAVwhere the weapons are configured for each UAV subjectto the UAVrsquos constraints on payload and hanging pointsAn illustration of the MD-URP-WCampTW is presented inFigure 1 In the MD-URP-WCampTW the commander has tooptimize the decisions onwhich depot the UAV leaves whichtargets are visited in what sequence what type and howmanyweapons are configured on the UAV and what type and howmany weapons are delivered to each target The objectiveis to minimize the number of UAVs employed the overallweapons consumed for destroying all the targets and the totalcost (timedistance) traveled by all UAVs
31 Symbol Description The notations and symbols utilizedin the model formulation are presented as follows
(1) Sets
119873 the set of targets and119873 = 1 2 119899119872 the set of depots and119872 = 119899+1 119899+2 119899+119898119880 the set of UAVs and 119880 = 1 2 119906119882 the set of different weapon types and 119882 =1 2 119908
(2) Parameters
119886119894 damage demand of target 119894 and 119894 isin 119873119888 the payload capacity of the UAV119892 the number of hanging points of the UAV119905119894119895 the time of UAV flying from target 119894 to target119895 and 119894 119895 isin 119873 119894 = 119895119891ℎ the cost of a weapon of type ℎ and ℎ isin 119882119902ℎ the weight of a weapon of type ℎ and ℎ isin 119882119887119894ℎ the combat ability of weapon ℎ on target 119894and 119894 isin 119873 ℎ isin 119882119903 the duration time of UAV119890119894 the earliest allowed hitting time of target 119894and 119894 isin 119873119897119894 the latest allowed hitting time of target 119894 and119894 isin 119873119904119894 the spent time of UAV hitting target 119894 and 119894 isin119873119908119896119894 the waiting time of UAV 119896 hovering abovetarget 119894 and 119896 isin 119880 119894 isin 119873119871 a large enough number
(3) Decision Variables
119909119894119895119896 binary variable which is equal to 1 if atarget 119895 is attacked after target 119894 by UAV 119896 and0 otherwise119905119896119894 continuous variable the moment of UAV 119896reaching target 119894119910119896ℎ119894 integer variable which denotes the numberof weapons ℎ on UAV 119896 used to attack target 119894and 119910119896ℎ119894 ge 0
32 Mathematical Model The MD-URP-WCampTW can beformulated as the following mixed-integer programmingmodel
min 119885
= 1198751119899+119898
sum119894=119899+1
119899
sum119895=1
119906
sum119896=1
119909119894119895119896 + 1198752119908
sumℎ=1
119906
sum119896=1
119899
sum119894=1
119891ℎ119910119896ℎ119894
+ 1198753119899+119898
sum119894=1
119899+119898
sum119895=1
119906
sum119896=1
(119905119894119895 + 119908119896119894 + 119904119894) 119909119894119895119896
(1)
subject to119906
sum119896=1
119899+119898
sum119894=0119894 =119895
119909119894119895119896 = 1 forall119895 isin 119873 (2)
4 Journal of Advanced Transportation
119906
sum119896=1
119899+119898
sum119895=0119894 =119895
119909119894119895119896 = 1 forall119894 isin 119873 (3)
119899+119898
sum119894=1
119909119894119901119896 minus119899+119898
sum119895=1
119909119901119895119896 = 0
forall119901 isin 119873 cup119872 119896 isin 119880
(4)
119908
sumℎ=1
119902ℎ119899
sum119894=1
119910119896ℎ119894 le 119888 forall119896 isin 119880 (5)
119908
sumℎ=1
119899
sum119894=1
119910119896ℎ119894 le 119892 forall119896 isin 119880 (6)
V
sum119896=1
119908
sumℎ=1
119887ℎ119894119910119896ℎ119894 le 119886119894 forall119894 isin 119873 (7)
119910119896ℎ119894 le 119871119899
sum119895=1
119909119894119895119896
forall119894 isin 119873 119896 isin 119880 ℎ isin 119882
(8)
119899+119898
sum119894=0
119899+119898
sum119895=0
(119905119894119895 + 119904119894 + 119908119896119894) 119909119894119895119896 le 119903
forall119896 isin 119880
(9)
119905119896119894 + 119905119894119895 + 119908119896119894 + 119904119894 minus 119871 (1 minus 119909119894119895119896) le 119905119896119895
forall119894 isin 119873(10)
119905119896119894 + 119908119896119894 ge 119890119894 forall119894 isin 119873 (11)
119905119896119894 + 119908119896119894 + 119904119894 le 119897119894 forall119894 isin 119873 (12)
119905119896119894 ge 0 forall119894 isin 119873 119896 isin 119880 (13)
119910119896ℎ119894 ge 0 forall119896 isin 119880 ℎ isin 119882 119894 isin 119873 (14)
119909119894119895119896 isin 0 1 forall119894 isin 119873 119895 isin 119873 119896 isin 119880 (15)
The objective function consists of three parts The firstpart represents the total number of UAVs used in combatoperations the second part shows the total cost of theweapons used in combat operations and the third partexpresses the total flight time for all UAVs in combatoperations 1198751 1198752 and 1198753 are the weight coefficients of eachpart to adjust the three parts of the objective function to thesame number of units Constraints (2) and (3) define thatevery target can be hit by one UAV Flow conservation isguaranteed by constraints (4) Constraints (5) ensure that thatthe total weight of category 119897 weapons carried by each UAVcannot exceed its load limit Constraints (6) ensure that thenumber of weapons mounted on each UAV does not exceedthe number of weapons hanging on the UAV Constraints(7) regulate that the damage demand of each target mustbe fulfilled Constraints (8) ensure that the UAV can only
Input119904initial initial solutionsix neighborhood structuresOutput the best solution 119904lowast119904lowast larr 119904initial119904current larr 119904initialinitialize scores on neighborhood structureswhile acceptance standards not meet do
select a neighborhood structuremodify 119904current by chosen structure to generate 119904newif 119904new is accepted then
119904current larr 119904newendif 119885(119904new) le 119885(119904lowast) then119904lowast larr 119904new
endupdate scores on neighborhood structures
endReturn 119904lowast
Algorithm 1 Procedure of the ALNS
drop off weapons to the target visited by it Constraints(9) guarantee that the endurance of the UAV must not beexceeded Constraints (10) ensure that the arriving time ofUAV 119896 at target 119894 is no later than the arriving time at target 119895 ifUAV 119896 attacks target 119894 after target 119895 Constraints (11) and (12)are time window constraints for the UAV to perform a taskConstraints (13) (14) and (15) are the constraints of decisionvariables
4 Algorithm
ALNS is an extension of the large neighborhood searchalgorithm and is first proposed by Ropke and Pisinger [24]which has been widely employed for solving complex vehiclerouting problems [25 26] The main procedure of ALNS isillustrated in Algorithm 1 The ALNS starts from an initialfeasible solution and conducts iteratively search for bettersolutionsThe initial feasible solution is usually generated by aconstructive heuristic In each iteration the current solutionis destroyed and repaired by heuristics which are selectedbased on their past performances
41 The Heuristic Algorithm for Constructing an InitialSolution The heuristic algorithm for generating an initialsolution aims to rapidly construct a feasible solution whichincludes four main steps First weapons are assigned to eachtarget according to its damage requirements based on someheuristic rules Second the targets are clustered to the depotsthrough the clustering strategies Third a complete tour isconstructed to visit all the targets assigned to a depot Finallythe feasible flight path for each UAV is constructed
411 Weapon Allocation Strategy The weapon assignmentstrategy is to determine the type and quantity of weaponsused to attack the target and meet its damage requirement
Journal of Advanced Transportation 5
Input 119886119894 119887119894119898 for 119894 isin 119873 119898 isin 119882Output 119908119886119905119894119898 the number of weapon119898 assigned to target 119894
Set 119908119886119905119894119898 = 0 (119898 isin 119882)119898lowast = argmax119887119894119898 119898 isin 119882119908119886119905119894119898lowast = lfloor119886119894119887119894119898lowastrfloor1198981015840 = argmin119891119898 | 119898 isin 119882 and 119886119894 minus 119908119886119905119894119898lowast119887119894119898lowast minus 119887119894119898 le 01199081198861199051198941198981015840++
Return 119908119886119905119894119898 (119898 isin 119882)
Algorithm 2 Procedure of the assigning strategy based on destroy effect
Inputeff119894119898 the cost-effectiveness ratio of weaponm against target 119894119902119898 the weight of weapon119898119898 isin 119882119888 the UAVrsquos payload119892 the number of hanging points in the UAVOutput119908119886119905119894119898 the number of weapon119898 assigned to target 119894Set 119862119882119867 = minus1 119908119886119905119894119898 = 0 (119898 isin 119882)while (119862119882119867 lt 0) do
119898lowast = argmaxeff119894119898 119898 isin 119882119908119886119905119894119898lowast = lceil119886119894119887119894119898lowastrceilif (sum119872119898=1 119902119898119908119886119905119894119898 le 119888 and sum
119872119898=1 119908119886119905119894119898 le 119892) then
119862119882119867 = 1endelse
119908119886119905119894119898lowast = 0119882 = 119882119898lowast
endendReturn 119908119886119905119894119898 (119898 isin 119882)
Algorithm 3 Procedure of the assigning strategy based on cost-effectiveness
Two strategies are designed to dispose and assign weapons tothe targets
(a) Assigning Strategy Based on Destroy Effect The assigningstrategy based on destroy effect is to select the weapon withthe highest destroy effect on the target and assign it to thetarget The main procedure is illustrated in Algorithm 2
(b) Assigning Strategy Based on Cost-Effectiveness In theassigning strategy based on cost-effectiveness a measure-ment named as ldquocost-effectivenessrdquo is introduced as follows
eff119894119898 =119887119894119898119891119898
(16)
The weapon with the highest ldquocost-effectivenessrdquo is pref-erentially selected and assigned to the target The main pro-cedure for the assigning strategy based on cost-effectivenessis illustrated in Algorithm 3
412 Target Clustering Strategy Three target clusteringstrategies are designed for assigning targets to each depot
which are distance based clustering greedy search clusteringand virtual feedback clustering
(a) Distance Based Clustering (DC) The basic idea of theDC strategy is to assign each target to its closest depot Thedistance between each target point and each depot is firstcalculated and then the targets are clustered to their closestdepot
(b) Greedy Search Clustering (GSC) In the GSC strategy eachdepot is first allowed to select one target randomly and thenthe target closest to the selected target is addedThe operationis repeated until all targets are assigned to the appropriatedepots The GSC strategy is illustrated in Figure 2
(c) Virtual Feedback Clustering (VFC) The basic idea of theVFC strategy is to assume that there is a virtual depot aroundthe known depots and all UAVs performing the strikingtask are from the virtual depot We can obtain 119878 a set ofpath planning schemes for multiple UAVs departing fromthe virtual depot In addition 119878 = 1199041 1199042 119904119906 where 119906denotes the quantity of UAVs usedThen the virtual depot ischanged to the actual depot for each route in 119878The total flying
6 Journal of Advanced Transportation
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Figure 2 The operation process for the GSC strategy
distance is computed every time after the depot is changedThe targets corresponding to the changing scheme with theshortest distance are assigned to the appropriate depots Theabove operation is repeated until all elements in set 119878 areassigned
413 Target Sequencing Strategy The target sequencing strat-egy aims to determine the sequence in which the UAV visitsthe targets subject to their time windows There are fourstrategies for sequencing the targets which are sequencingbased on distance (SD) sequencing based on earliest strikingtime (SEST) sequencing based on latest striking time (SLST)and sequencing based on time window width (STWW) TheSD strategy aims to sort all targets by the distance to the depotin an ascending order AUAVfirst visits the closest target andthen the next target at a longer distance after departing fromthe depot The UAV visits the remaining targets in the samemanner until all targets are visited The SEST strategy is tovisit all targets in an ascending order by the earliest strikingtime of the target that is the targets with earlier striking timeshould be attacked earlier In the SLST strategy all targets arevisited in a descending order of the latest striking time The
STWW strategy is to visit all targets in an ascending order ofthe time window width
414 Feasible Route Construction (FRC) In this step afeasible route for each UAV is constructed while consider-ing the constraints on endurance payload the number ofhanging points in UAV and the time window of the targetThe main procedure of the FRC algorithm is presented inAlgorithm 4
The basic idea of FRC is to let a UAV depart from thedepot and visit the targets one by one The total weight andquantity of the weapons carried by the UAV and its totalactual flight time are calculated when it arrives at a targetThen constraints (5) (6) (9) (11) and (12) are checked andthe target is added to the UAVrsquos route if all these constraintsare satisfied If any constraint is not met the UAV returns tothe depot and the target is assigned to a new UAV and itsroute The operation is repeated until all targets are visited
42 Neighbourhood Structures In ALNS the neighborhoodstructures are employed to slightly diversify the starting point
Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Journal of Advanced Transportation
Table 1 Weapon-target combat ability matrix
Small smartbomb
Small precisionguided bomb
Laser-guidedbomb
Bridge 035 065 095Communicationstation 04 055 075
weapons Table 1 presents the combat ability matrix of threedifferent weapons on two targets It can be seen that ifthe destroy requirement for the bridge target is restrictedover 90 in the mission there are a number of combinationsof weapons that can satisfy the requirement such as 3small smart bombs 1 small smart bomb 1 small precisionguided bomb and 1 laser-guided bomb Thus the weaponsdelivered to a target are not deterministic and are impactedby the weapon configuration and routing strategies of theUAV while the types and quantities of products deliveredto each customer are deterministic in the general VRPproblem
Motivated by the practical requirement in military mis-sion planning of UAV we investigated the multidepot UAVrouting problem with weapon configuration and time win-dow (MD-URP-WCampTW) which can be viewed as a newextension on the traditional VRP In MD-URP-WCampTWthree kinds of decisions should be cooperatively optimizedwhich are the weapon configuration strategy in the UAVthe routing strategy of target and the allocation strategy ofweapons to targets The interaction among these decisionsmakes the modelling and solution of the problem morecomplex In this paper a mixed-integer linear program-ming model is developed to formulate the problem anda powerful adaptive large neighborhood search (ALNS)based metaheuristic is proposed to obtain better feasiblesolutions
The paper is organized as follows In Section 2 the relatedliteratures are reviewed The formulated model is developedin Section 3 and the proposed ALNS algorithm includingits main steps is presented in Section 4 The computationalresults are reported and analyzed in Section 5 Section 6concludes the paper
2 Literature Review
Multidepot UAV routing problem with consideration ofweapon configuration and time window is related to mainstreams of literatures which are UAV path planningroutingandUAV task assignment A review of the literatures on thesetwo fields is summarized below
The earlier studies in the field of UAV flight path opti-mization mainly focused on optimizing the UAV flight pathfrom the control level It is necessary to consider the influ-ence of the turning angle obstacle avoidance and weatherconditions (such as wind power level) on the UAV Based onthese constraints an optimal flight path is found for the UAV[6] Edison and Shima [7] studied the mission planning andpath planning ofmulti-UAV inmilitary operationsThey fullyconsidered flight parameters such as the minimum turningradius in the proposed mathematical model and solved the
problem using a genetic algorithm Zhang et al [8] studiedmulti-UAV path planning considering mobility collisionavoidance and flight information sharing and proposed theCooperative and Geometric Learning Algorithm (CGLA)to solve the above problem Moon et al [9] developed amultilevel planning model for multi-UAV task assignmentand path planning taking into account practical constraintssuch as collision avoidance between UAVs and solved theproblem by the Alowast algorithm Yang et al [10] studied the pathplanning problem of UAV in terms of obstacle avoidancedecomposed the original goal and constraint function ofUAV path planning into a new set of evaluation functionsand proposed the evolutionary algorithm for solving theproblem
With the improvement in intelligent control technologyfor UAVs UAVs can independently complete the flightbetween the target points In recent years studies on UAVpath planning have begun to focus on tactical optimizationin order to minimize the overall minimum flight distance byoptimizing the sequence of UAV to visit the target Shettyet al [11] studied multi-UAV task assignment and routingproblems based on target priority and distinguished thetargets by their degrees of importance using the Tabu searchalgorithm Mufalli et al [12] studied the multi-UAV routingproblem for target reconnaissance considering the load con-straints of the UAV and solved the problem by the columngeneration and heuristic algorithm Liu et al [13] studiedthe UAV deployment and routing problem for road-trafficinformation collection Subject to the number of UAVs andthe maximum cruise distance a multiobjective optimizationmodel was developed Moyo and Plessis [14] studied theinspection path optimization problem for the cable networkof UAVs and described it as a traveling salesman problem(TSP) Guerriero et al [15] proposed a system of UAVs thatare able to communicate self-organize and cooperate Amulticriteria optimizationmodelwas developed to determinethe distributed dynamic schedule of UAVs and ensure bothspatial coverage and temporal coverage of specific targetsEvers et al [16] studied multi-UAV path planning with targetreconnaissance time windows Luo et al [17] studied thetwo-echelon routing problem of mounting UAV on a groundvehicle (GV) where the GV acts as the mobile depot forlaunching and recycling the UAV while the UAV visits thetargets for information collection
In order to facilitate multi-UAV collaborative task alloca-tion during mission planning Ghalenoei et al [18] proposedthe Discrete Invasive Weed Optimization Algorithm for spe-cific target attributes and geographical locations George etal [19] proposed an online task assignment algorithm basedon UAV task alliance to deal with unexpected tasks whichinvolves requesting adjacent UAVs to form task alliances andreplanning the tasks Zhong et al [20] studied the UAV taskassignment problem with dynamic changes in target valueover time taking into account various constraints includingUAV flight altitude maximum climb height and maximumturning radius Hu et al [21] studied the assignment ofUAV collaborative tasks using the hierarchical assignmentmethod and solved the problem by an improved ant colonyalgorithm Yin et al [22] described the UAV collaborative
Journal of Advanced Transportation 3
1 2
610
3
12
4
5
8
9
7 11
Depot
Target
Route
Figure 1 An illustration of the MD-URP-WCampTW
task assignment problem as a multiobjective optimizationproblem and solved it using a Pareto-dominated multiob-jective discrete particle swarm optimization algorithm Jin[23] studied the distributed UAV task allocation problemwhere the tasks are divided into detection attack andverification
As far as current UAV mission planning and path plan-ning studies are concerned no study has focused on theintegrated optimization of UAV flight path for target attackand airborne weapons configuration Taking into accountthe type and quantity of weapons on board during theUAV path planning process there exists a new direction fortraditional path planning which is of great significance forimproving the efficiency of UAV mission planning in themilitary
3 Model Formulation
The MD-URP-WCampTW considers a set of targets each ofwhich must be attacked once by one UAV The weaponsdelivered to the target must be able to destroy it over arequired destroy levelThere are multiple depots for the UAVwhere the weapons are configured for each UAV subjectto the UAVrsquos constraints on payload and hanging pointsAn illustration of the MD-URP-WCampTW is presented inFigure 1 In the MD-URP-WCampTW the commander has tooptimize the decisions onwhich depot the UAV leaves whichtargets are visited in what sequence what type and howmanyweapons are configured on the UAV and what type and howmany weapons are delivered to each target The objectiveis to minimize the number of UAVs employed the overallweapons consumed for destroying all the targets and the totalcost (timedistance) traveled by all UAVs
31 Symbol Description The notations and symbols utilizedin the model formulation are presented as follows
(1) Sets
119873 the set of targets and119873 = 1 2 119899119872 the set of depots and119872 = 119899+1 119899+2 119899+119898119880 the set of UAVs and 119880 = 1 2 119906119882 the set of different weapon types and 119882 =1 2 119908
(2) Parameters
119886119894 damage demand of target 119894 and 119894 isin 119873119888 the payload capacity of the UAV119892 the number of hanging points of the UAV119905119894119895 the time of UAV flying from target 119894 to target119895 and 119894 119895 isin 119873 119894 = 119895119891ℎ the cost of a weapon of type ℎ and ℎ isin 119882119902ℎ the weight of a weapon of type ℎ and ℎ isin 119882119887119894ℎ the combat ability of weapon ℎ on target 119894and 119894 isin 119873 ℎ isin 119882119903 the duration time of UAV119890119894 the earliest allowed hitting time of target 119894and 119894 isin 119873119897119894 the latest allowed hitting time of target 119894 and119894 isin 119873119904119894 the spent time of UAV hitting target 119894 and 119894 isin119873119908119896119894 the waiting time of UAV 119896 hovering abovetarget 119894 and 119896 isin 119880 119894 isin 119873119871 a large enough number
(3) Decision Variables
119909119894119895119896 binary variable which is equal to 1 if atarget 119895 is attacked after target 119894 by UAV 119896 and0 otherwise119905119896119894 continuous variable the moment of UAV 119896reaching target 119894119910119896ℎ119894 integer variable which denotes the numberof weapons ℎ on UAV 119896 used to attack target 119894and 119910119896ℎ119894 ge 0
32 Mathematical Model The MD-URP-WCampTW can beformulated as the following mixed-integer programmingmodel
min 119885
= 1198751119899+119898
sum119894=119899+1
119899
sum119895=1
119906
sum119896=1
119909119894119895119896 + 1198752119908
sumℎ=1
119906
sum119896=1
119899
sum119894=1
119891ℎ119910119896ℎ119894
+ 1198753119899+119898
sum119894=1
119899+119898
sum119895=1
119906
sum119896=1
(119905119894119895 + 119908119896119894 + 119904119894) 119909119894119895119896
(1)
subject to119906
sum119896=1
119899+119898
sum119894=0119894 =119895
119909119894119895119896 = 1 forall119895 isin 119873 (2)
4 Journal of Advanced Transportation
119906
sum119896=1
119899+119898
sum119895=0119894 =119895
119909119894119895119896 = 1 forall119894 isin 119873 (3)
119899+119898
sum119894=1
119909119894119901119896 minus119899+119898
sum119895=1
119909119901119895119896 = 0
forall119901 isin 119873 cup119872 119896 isin 119880
(4)
119908
sumℎ=1
119902ℎ119899
sum119894=1
119910119896ℎ119894 le 119888 forall119896 isin 119880 (5)
119908
sumℎ=1
119899
sum119894=1
119910119896ℎ119894 le 119892 forall119896 isin 119880 (6)
V
sum119896=1
119908
sumℎ=1
119887ℎ119894119910119896ℎ119894 le 119886119894 forall119894 isin 119873 (7)
119910119896ℎ119894 le 119871119899
sum119895=1
119909119894119895119896
forall119894 isin 119873 119896 isin 119880 ℎ isin 119882
(8)
119899+119898
sum119894=0
119899+119898
sum119895=0
(119905119894119895 + 119904119894 + 119908119896119894) 119909119894119895119896 le 119903
forall119896 isin 119880
(9)
119905119896119894 + 119905119894119895 + 119908119896119894 + 119904119894 minus 119871 (1 minus 119909119894119895119896) le 119905119896119895
forall119894 isin 119873(10)
119905119896119894 + 119908119896119894 ge 119890119894 forall119894 isin 119873 (11)
119905119896119894 + 119908119896119894 + 119904119894 le 119897119894 forall119894 isin 119873 (12)
119905119896119894 ge 0 forall119894 isin 119873 119896 isin 119880 (13)
119910119896ℎ119894 ge 0 forall119896 isin 119880 ℎ isin 119882 119894 isin 119873 (14)
119909119894119895119896 isin 0 1 forall119894 isin 119873 119895 isin 119873 119896 isin 119880 (15)
The objective function consists of three parts The firstpart represents the total number of UAVs used in combatoperations the second part shows the total cost of theweapons used in combat operations and the third partexpresses the total flight time for all UAVs in combatoperations 1198751 1198752 and 1198753 are the weight coefficients of eachpart to adjust the three parts of the objective function to thesame number of units Constraints (2) and (3) define thatevery target can be hit by one UAV Flow conservation isguaranteed by constraints (4) Constraints (5) ensure that thatthe total weight of category 119897 weapons carried by each UAVcannot exceed its load limit Constraints (6) ensure that thenumber of weapons mounted on each UAV does not exceedthe number of weapons hanging on the UAV Constraints(7) regulate that the damage demand of each target mustbe fulfilled Constraints (8) ensure that the UAV can only
Input119904initial initial solutionsix neighborhood structuresOutput the best solution 119904lowast119904lowast larr 119904initial119904current larr 119904initialinitialize scores on neighborhood structureswhile acceptance standards not meet do
select a neighborhood structuremodify 119904current by chosen structure to generate 119904newif 119904new is accepted then
119904current larr 119904newendif 119885(119904new) le 119885(119904lowast) then119904lowast larr 119904new
endupdate scores on neighborhood structures
endReturn 119904lowast
Algorithm 1 Procedure of the ALNS
drop off weapons to the target visited by it Constraints(9) guarantee that the endurance of the UAV must not beexceeded Constraints (10) ensure that the arriving time ofUAV 119896 at target 119894 is no later than the arriving time at target 119895 ifUAV 119896 attacks target 119894 after target 119895 Constraints (11) and (12)are time window constraints for the UAV to perform a taskConstraints (13) (14) and (15) are the constraints of decisionvariables
4 Algorithm
ALNS is an extension of the large neighborhood searchalgorithm and is first proposed by Ropke and Pisinger [24]which has been widely employed for solving complex vehiclerouting problems [25 26] The main procedure of ALNS isillustrated in Algorithm 1 The ALNS starts from an initialfeasible solution and conducts iteratively search for bettersolutionsThe initial feasible solution is usually generated by aconstructive heuristic In each iteration the current solutionis destroyed and repaired by heuristics which are selectedbased on their past performances
41 The Heuristic Algorithm for Constructing an InitialSolution The heuristic algorithm for generating an initialsolution aims to rapidly construct a feasible solution whichincludes four main steps First weapons are assigned to eachtarget according to its damage requirements based on someheuristic rules Second the targets are clustered to the depotsthrough the clustering strategies Third a complete tour isconstructed to visit all the targets assigned to a depot Finallythe feasible flight path for each UAV is constructed
411 Weapon Allocation Strategy The weapon assignmentstrategy is to determine the type and quantity of weaponsused to attack the target and meet its damage requirement
Journal of Advanced Transportation 5
Input 119886119894 119887119894119898 for 119894 isin 119873 119898 isin 119882Output 119908119886119905119894119898 the number of weapon119898 assigned to target 119894
Set 119908119886119905119894119898 = 0 (119898 isin 119882)119898lowast = argmax119887119894119898 119898 isin 119882119908119886119905119894119898lowast = lfloor119886119894119887119894119898lowastrfloor1198981015840 = argmin119891119898 | 119898 isin 119882 and 119886119894 minus 119908119886119905119894119898lowast119887119894119898lowast minus 119887119894119898 le 01199081198861199051198941198981015840++
Return 119908119886119905119894119898 (119898 isin 119882)
Algorithm 2 Procedure of the assigning strategy based on destroy effect
Inputeff119894119898 the cost-effectiveness ratio of weaponm against target 119894119902119898 the weight of weapon119898119898 isin 119882119888 the UAVrsquos payload119892 the number of hanging points in the UAVOutput119908119886119905119894119898 the number of weapon119898 assigned to target 119894Set 119862119882119867 = minus1 119908119886119905119894119898 = 0 (119898 isin 119882)while (119862119882119867 lt 0) do
119898lowast = argmaxeff119894119898 119898 isin 119882119908119886119905119894119898lowast = lceil119886119894119887119894119898lowastrceilif (sum119872119898=1 119902119898119908119886119905119894119898 le 119888 and sum
119872119898=1 119908119886119905119894119898 le 119892) then
119862119882119867 = 1endelse
119908119886119905119894119898lowast = 0119882 = 119882119898lowast
endendReturn 119908119886119905119894119898 (119898 isin 119882)
Algorithm 3 Procedure of the assigning strategy based on cost-effectiveness
Two strategies are designed to dispose and assign weapons tothe targets
(a) Assigning Strategy Based on Destroy Effect The assigningstrategy based on destroy effect is to select the weapon withthe highest destroy effect on the target and assign it to thetarget The main procedure is illustrated in Algorithm 2
(b) Assigning Strategy Based on Cost-Effectiveness In theassigning strategy based on cost-effectiveness a measure-ment named as ldquocost-effectivenessrdquo is introduced as follows
eff119894119898 =119887119894119898119891119898
(16)
The weapon with the highest ldquocost-effectivenessrdquo is pref-erentially selected and assigned to the target The main pro-cedure for the assigning strategy based on cost-effectivenessis illustrated in Algorithm 3
412 Target Clustering Strategy Three target clusteringstrategies are designed for assigning targets to each depot
which are distance based clustering greedy search clusteringand virtual feedback clustering
(a) Distance Based Clustering (DC) The basic idea of theDC strategy is to assign each target to its closest depot Thedistance between each target point and each depot is firstcalculated and then the targets are clustered to their closestdepot
(b) Greedy Search Clustering (GSC) In the GSC strategy eachdepot is first allowed to select one target randomly and thenthe target closest to the selected target is addedThe operationis repeated until all targets are assigned to the appropriatedepots The GSC strategy is illustrated in Figure 2
(c) Virtual Feedback Clustering (VFC) The basic idea of theVFC strategy is to assume that there is a virtual depot aroundthe known depots and all UAVs performing the strikingtask are from the virtual depot We can obtain 119878 a set ofpath planning schemes for multiple UAVs departing fromthe virtual depot In addition 119878 = 1199041 1199042 119904119906 where 119906denotes the quantity of UAVs usedThen the virtual depot ischanged to the actual depot for each route in 119878The total flying
6 Journal of Advanced Transportation
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Figure 2 The operation process for the GSC strategy
distance is computed every time after the depot is changedThe targets corresponding to the changing scheme with theshortest distance are assigned to the appropriate depots Theabove operation is repeated until all elements in set 119878 areassigned
413 Target Sequencing Strategy The target sequencing strat-egy aims to determine the sequence in which the UAV visitsthe targets subject to their time windows There are fourstrategies for sequencing the targets which are sequencingbased on distance (SD) sequencing based on earliest strikingtime (SEST) sequencing based on latest striking time (SLST)and sequencing based on time window width (STWW) TheSD strategy aims to sort all targets by the distance to the depotin an ascending order AUAVfirst visits the closest target andthen the next target at a longer distance after departing fromthe depot The UAV visits the remaining targets in the samemanner until all targets are visited The SEST strategy is tovisit all targets in an ascending order by the earliest strikingtime of the target that is the targets with earlier striking timeshould be attacked earlier In the SLST strategy all targets arevisited in a descending order of the latest striking time The
STWW strategy is to visit all targets in an ascending order ofthe time window width
414 Feasible Route Construction (FRC) In this step afeasible route for each UAV is constructed while consider-ing the constraints on endurance payload the number ofhanging points in UAV and the time window of the targetThe main procedure of the FRC algorithm is presented inAlgorithm 4
The basic idea of FRC is to let a UAV depart from thedepot and visit the targets one by one The total weight andquantity of the weapons carried by the UAV and its totalactual flight time are calculated when it arrives at a targetThen constraints (5) (6) (9) (11) and (12) are checked andthe target is added to the UAVrsquos route if all these constraintsare satisfied If any constraint is not met the UAV returns tothe depot and the target is assigned to a new UAV and itsroute The operation is repeated until all targets are visited
42 Neighbourhood Structures In ALNS the neighborhoodstructures are employed to slightly diversify the starting point
Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 3
1 2
610
3
12
4
5
8
9
7 11
Depot
Target
Route
Figure 1 An illustration of the MD-URP-WCampTW
task assignment problem as a multiobjective optimizationproblem and solved it using a Pareto-dominated multiob-jective discrete particle swarm optimization algorithm Jin[23] studied the distributed UAV task allocation problemwhere the tasks are divided into detection attack andverification
As far as current UAV mission planning and path plan-ning studies are concerned no study has focused on theintegrated optimization of UAV flight path for target attackand airborne weapons configuration Taking into accountthe type and quantity of weapons on board during theUAV path planning process there exists a new direction fortraditional path planning which is of great significance forimproving the efficiency of UAV mission planning in themilitary
3 Model Formulation
The MD-URP-WCampTW considers a set of targets each ofwhich must be attacked once by one UAV The weaponsdelivered to the target must be able to destroy it over arequired destroy levelThere are multiple depots for the UAVwhere the weapons are configured for each UAV subjectto the UAVrsquos constraints on payload and hanging pointsAn illustration of the MD-URP-WCampTW is presented inFigure 1 In the MD-URP-WCampTW the commander has tooptimize the decisions onwhich depot the UAV leaves whichtargets are visited in what sequence what type and howmanyweapons are configured on the UAV and what type and howmany weapons are delivered to each target The objectiveis to minimize the number of UAVs employed the overallweapons consumed for destroying all the targets and the totalcost (timedistance) traveled by all UAVs
31 Symbol Description The notations and symbols utilizedin the model formulation are presented as follows
(1) Sets
119873 the set of targets and119873 = 1 2 119899119872 the set of depots and119872 = 119899+1 119899+2 119899+119898119880 the set of UAVs and 119880 = 1 2 119906119882 the set of different weapon types and 119882 =1 2 119908
(2) Parameters
119886119894 damage demand of target 119894 and 119894 isin 119873119888 the payload capacity of the UAV119892 the number of hanging points of the UAV119905119894119895 the time of UAV flying from target 119894 to target119895 and 119894 119895 isin 119873 119894 = 119895119891ℎ the cost of a weapon of type ℎ and ℎ isin 119882119902ℎ the weight of a weapon of type ℎ and ℎ isin 119882119887119894ℎ the combat ability of weapon ℎ on target 119894and 119894 isin 119873 ℎ isin 119882119903 the duration time of UAV119890119894 the earliest allowed hitting time of target 119894and 119894 isin 119873119897119894 the latest allowed hitting time of target 119894 and119894 isin 119873119904119894 the spent time of UAV hitting target 119894 and 119894 isin119873119908119896119894 the waiting time of UAV 119896 hovering abovetarget 119894 and 119896 isin 119880 119894 isin 119873119871 a large enough number
(3) Decision Variables
119909119894119895119896 binary variable which is equal to 1 if atarget 119895 is attacked after target 119894 by UAV 119896 and0 otherwise119905119896119894 continuous variable the moment of UAV 119896reaching target 119894119910119896ℎ119894 integer variable which denotes the numberof weapons ℎ on UAV 119896 used to attack target 119894and 119910119896ℎ119894 ge 0
32 Mathematical Model The MD-URP-WCampTW can beformulated as the following mixed-integer programmingmodel
min 119885
= 1198751119899+119898
sum119894=119899+1
119899
sum119895=1
119906
sum119896=1
119909119894119895119896 + 1198752119908
sumℎ=1
119906
sum119896=1
119899
sum119894=1
119891ℎ119910119896ℎ119894
+ 1198753119899+119898
sum119894=1
119899+119898
sum119895=1
119906
sum119896=1
(119905119894119895 + 119908119896119894 + 119904119894) 119909119894119895119896
(1)
subject to119906
sum119896=1
119899+119898
sum119894=0119894 =119895
119909119894119895119896 = 1 forall119895 isin 119873 (2)
4 Journal of Advanced Transportation
119906
sum119896=1
119899+119898
sum119895=0119894 =119895
119909119894119895119896 = 1 forall119894 isin 119873 (3)
119899+119898
sum119894=1
119909119894119901119896 minus119899+119898
sum119895=1
119909119901119895119896 = 0
forall119901 isin 119873 cup119872 119896 isin 119880
(4)
119908
sumℎ=1
119902ℎ119899
sum119894=1
119910119896ℎ119894 le 119888 forall119896 isin 119880 (5)
119908
sumℎ=1
119899
sum119894=1
119910119896ℎ119894 le 119892 forall119896 isin 119880 (6)
V
sum119896=1
119908
sumℎ=1
119887ℎ119894119910119896ℎ119894 le 119886119894 forall119894 isin 119873 (7)
119910119896ℎ119894 le 119871119899
sum119895=1
119909119894119895119896
forall119894 isin 119873 119896 isin 119880 ℎ isin 119882
(8)
119899+119898
sum119894=0
119899+119898
sum119895=0
(119905119894119895 + 119904119894 + 119908119896119894) 119909119894119895119896 le 119903
forall119896 isin 119880
(9)
119905119896119894 + 119905119894119895 + 119908119896119894 + 119904119894 minus 119871 (1 minus 119909119894119895119896) le 119905119896119895
forall119894 isin 119873(10)
119905119896119894 + 119908119896119894 ge 119890119894 forall119894 isin 119873 (11)
119905119896119894 + 119908119896119894 + 119904119894 le 119897119894 forall119894 isin 119873 (12)
119905119896119894 ge 0 forall119894 isin 119873 119896 isin 119880 (13)
119910119896ℎ119894 ge 0 forall119896 isin 119880 ℎ isin 119882 119894 isin 119873 (14)
119909119894119895119896 isin 0 1 forall119894 isin 119873 119895 isin 119873 119896 isin 119880 (15)
The objective function consists of three parts The firstpart represents the total number of UAVs used in combatoperations the second part shows the total cost of theweapons used in combat operations and the third partexpresses the total flight time for all UAVs in combatoperations 1198751 1198752 and 1198753 are the weight coefficients of eachpart to adjust the three parts of the objective function to thesame number of units Constraints (2) and (3) define thatevery target can be hit by one UAV Flow conservation isguaranteed by constraints (4) Constraints (5) ensure that thatthe total weight of category 119897 weapons carried by each UAVcannot exceed its load limit Constraints (6) ensure that thenumber of weapons mounted on each UAV does not exceedthe number of weapons hanging on the UAV Constraints(7) regulate that the damage demand of each target mustbe fulfilled Constraints (8) ensure that the UAV can only
Input119904initial initial solutionsix neighborhood structuresOutput the best solution 119904lowast119904lowast larr 119904initial119904current larr 119904initialinitialize scores on neighborhood structureswhile acceptance standards not meet do
select a neighborhood structuremodify 119904current by chosen structure to generate 119904newif 119904new is accepted then
119904current larr 119904newendif 119885(119904new) le 119885(119904lowast) then119904lowast larr 119904new
endupdate scores on neighborhood structures
endReturn 119904lowast
Algorithm 1 Procedure of the ALNS
drop off weapons to the target visited by it Constraints(9) guarantee that the endurance of the UAV must not beexceeded Constraints (10) ensure that the arriving time ofUAV 119896 at target 119894 is no later than the arriving time at target 119895 ifUAV 119896 attacks target 119894 after target 119895 Constraints (11) and (12)are time window constraints for the UAV to perform a taskConstraints (13) (14) and (15) are the constraints of decisionvariables
4 Algorithm
ALNS is an extension of the large neighborhood searchalgorithm and is first proposed by Ropke and Pisinger [24]which has been widely employed for solving complex vehiclerouting problems [25 26] The main procedure of ALNS isillustrated in Algorithm 1 The ALNS starts from an initialfeasible solution and conducts iteratively search for bettersolutionsThe initial feasible solution is usually generated by aconstructive heuristic In each iteration the current solutionis destroyed and repaired by heuristics which are selectedbased on their past performances
41 The Heuristic Algorithm for Constructing an InitialSolution The heuristic algorithm for generating an initialsolution aims to rapidly construct a feasible solution whichincludes four main steps First weapons are assigned to eachtarget according to its damage requirements based on someheuristic rules Second the targets are clustered to the depotsthrough the clustering strategies Third a complete tour isconstructed to visit all the targets assigned to a depot Finallythe feasible flight path for each UAV is constructed
411 Weapon Allocation Strategy The weapon assignmentstrategy is to determine the type and quantity of weaponsused to attack the target and meet its damage requirement
Journal of Advanced Transportation 5
Input 119886119894 119887119894119898 for 119894 isin 119873 119898 isin 119882Output 119908119886119905119894119898 the number of weapon119898 assigned to target 119894
Set 119908119886119905119894119898 = 0 (119898 isin 119882)119898lowast = argmax119887119894119898 119898 isin 119882119908119886119905119894119898lowast = lfloor119886119894119887119894119898lowastrfloor1198981015840 = argmin119891119898 | 119898 isin 119882 and 119886119894 minus 119908119886119905119894119898lowast119887119894119898lowast minus 119887119894119898 le 01199081198861199051198941198981015840++
Return 119908119886119905119894119898 (119898 isin 119882)
Algorithm 2 Procedure of the assigning strategy based on destroy effect
Inputeff119894119898 the cost-effectiveness ratio of weaponm against target 119894119902119898 the weight of weapon119898119898 isin 119882119888 the UAVrsquos payload119892 the number of hanging points in the UAVOutput119908119886119905119894119898 the number of weapon119898 assigned to target 119894Set 119862119882119867 = minus1 119908119886119905119894119898 = 0 (119898 isin 119882)while (119862119882119867 lt 0) do
119898lowast = argmaxeff119894119898 119898 isin 119882119908119886119905119894119898lowast = lceil119886119894119887119894119898lowastrceilif (sum119872119898=1 119902119898119908119886119905119894119898 le 119888 and sum
119872119898=1 119908119886119905119894119898 le 119892) then
119862119882119867 = 1endelse
119908119886119905119894119898lowast = 0119882 = 119882119898lowast
endendReturn 119908119886119905119894119898 (119898 isin 119882)
Algorithm 3 Procedure of the assigning strategy based on cost-effectiveness
Two strategies are designed to dispose and assign weapons tothe targets
(a) Assigning Strategy Based on Destroy Effect The assigningstrategy based on destroy effect is to select the weapon withthe highest destroy effect on the target and assign it to thetarget The main procedure is illustrated in Algorithm 2
(b) Assigning Strategy Based on Cost-Effectiveness In theassigning strategy based on cost-effectiveness a measure-ment named as ldquocost-effectivenessrdquo is introduced as follows
eff119894119898 =119887119894119898119891119898
(16)
The weapon with the highest ldquocost-effectivenessrdquo is pref-erentially selected and assigned to the target The main pro-cedure for the assigning strategy based on cost-effectivenessis illustrated in Algorithm 3
412 Target Clustering Strategy Three target clusteringstrategies are designed for assigning targets to each depot
which are distance based clustering greedy search clusteringand virtual feedback clustering
(a) Distance Based Clustering (DC) The basic idea of theDC strategy is to assign each target to its closest depot Thedistance between each target point and each depot is firstcalculated and then the targets are clustered to their closestdepot
(b) Greedy Search Clustering (GSC) In the GSC strategy eachdepot is first allowed to select one target randomly and thenthe target closest to the selected target is addedThe operationis repeated until all targets are assigned to the appropriatedepots The GSC strategy is illustrated in Figure 2
(c) Virtual Feedback Clustering (VFC) The basic idea of theVFC strategy is to assume that there is a virtual depot aroundthe known depots and all UAVs performing the strikingtask are from the virtual depot We can obtain 119878 a set ofpath planning schemes for multiple UAVs departing fromthe virtual depot In addition 119878 = 1199041 1199042 119904119906 where 119906denotes the quantity of UAVs usedThen the virtual depot ischanged to the actual depot for each route in 119878The total flying
6 Journal of Advanced Transportation
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Figure 2 The operation process for the GSC strategy
distance is computed every time after the depot is changedThe targets corresponding to the changing scheme with theshortest distance are assigned to the appropriate depots Theabove operation is repeated until all elements in set 119878 areassigned
413 Target Sequencing Strategy The target sequencing strat-egy aims to determine the sequence in which the UAV visitsthe targets subject to their time windows There are fourstrategies for sequencing the targets which are sequencingbased on distance (SD) sequencing based on earliest strikingtime (SEST) sequencing based on latest striking time (SLST)and sequencing based on time window width (STWW) TheSD strategy aims to sort all targets by the distance to the depotin an ascending order AUAVfirst visits the closest target andthen the next target at a longer distance after departing fromthe depot The UAV visits the remaining targets in the samemanner until all targets are visited The SEST strategy is tovisit all targets in an ascending order by the earliest strikingtime of the target that is the targets with earlier striking timeshould be attacked earlier In the SLST strategy all targets arevisited in a descending order of the latest striking time The
STWW strategy is to visit all targets in an ascending order ofthe time window width
414 Feasible Route Construction (FRC) In this step afeasible route for each UAV is constructed while consider-ing the constraints on endurance payload the number ofhanging points in UAV and the time window of the targetThe main procedure of the FRC algorithm is presented inAlgorithm 4
The basic idea of FRC is to let a UAV depart from thedepot and visit the targets one by one The total weight andquantity of the weapons carried by the UAV and its totalactual flight time are calculated when it arrives at a targetThen constraints (5) (6) (9) (11) and (12) are checked andthe target is added to the UAVrsquos route if all these constraintsare satisfied If any constraint is not met the UAV returns tothe depot and the target is assigned to a new UAV and itsroute The operation is repeated until all targets are visited
42 Neighbourhood Structures In ALNS the neighborhoodstructures are employed to slightly diversify the starting point
Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Journal of Advanced Transportation
119906
sum119896=1
119899+119898
sum119895=0119894 =119895
119909119894119895119896 = 1 forall119894 isin 119873 (3)
119899+119898
sum119894=1
119909119894119901119896 minus119899+119898
sum119895=1
119909119901119895119896 = 0
forall119901 isin 119873 cup119872 119896 isin 119880
(4)
119908
sumℎ=1
119902ℎ119899
sum119894=1
119910119896ℎ119894 le 119888 forall119896 isin 119880 (5)
119908
sumℎ=1
119899
sum119894=1
119910119896ℎ119894 le 119892 forall119896 isin 119880 (6)
V
sum119896=1
119908
sumℎ=1
119887ℎ119894119910119896ℎ119894 le 119886119894 forall119894 isin 119873 (7)
119910119896ℎ119894 le 119871119899
sum119895=1
119909119894119895119896
forall119894 isin 119873 119896 isin 119880 ℎ isin 119882
(8)
119899+119898
sum119894=0
119899+119898
sum119895=0
(119905119894119895 + 119904119894 + 119908119896119894) 119909119894119895119896 le 119903
forall119896 isin 119880
(9)
119905119896119894 + 119905119894119895 + 119908119896119894 + 119904119894 minus 119871 (1 minus 119909119894119895119896) le 119905119896119895
forall119894 isin 119873(10)
119905119896119894 + 119908119896119894 ge 119890119894 forall119894 isin 119873 (11)
119905119896119894 + 119908119896119894 + 119904119894 le 119897119894 forall119894 isin 119873 (12)
119905119896119894 ge 0 forall119894 isin 119873 119896 isin 119880 (13)
119910119896ℎ119894 ge 0 forall119896 isin 119880 ℎ isin 119882 119894 isin 119873 (14)
119909119894119895119896 isin 0 1 forall119894 isin 119873 119895 isin 119873 119896 isin 119880 (15)
The objective function consists of three parts The firstpart represents the total number of UAVs used in combatoperations the second part shows the total cost of theweapons used in combat operations and the third partexpresses the total flight time for all UAVs in combatoperations 1198751 1198752 and 1198753 are the weight coefficients of eachpart to adjust the three parts of the objective function to thesame number of units Constraints (2) and (3) define thatevery target can be hit by one UAV Flow conservation isguaranteed by constraints (4) Constraints (5) ensure that thatthe total weight of category 119897 weapons carried by each UAVcannot exceed its load limit Constraints (6) ensure that thenumber of weapons mounted on each UAV does not exceedthe number of weapons hanging on the UAV Constraints(7) regulate that the damage demand of each target mustbe fulfilled Constraints (8) ensure that the UAV can only
Input119904initial initial solutionsix neighborhood structuresOutput the best solution 119904lowast119904lowast larr 119904initial119904current larr 119904initialinitialize scores on neighborhood structureswhile acceptance standards not meet do
select a neighborhood structuremodify 119904current by chosen structure to generate 119904newif 119904new is accepted then
119904current larr 119904newendif 119885(119904new) le 119885(119904lowast) then119904lowast larr 119904new
endupdate scores on neighborhood structures
endReturn 119904lowast
Algorithm 1 Procedure of the ALNS
drop off weapons to the target visited by it Constraints(9) guarantee that the endurance of the UAV must not beexceeded Constraints (10) ensure that the arriving time ofUAV 119896 at target 119894 is no later than the arriving time at target 119895 ifUAV 119896 attacks target 119894 after target 119895 Constraints (11) and (12)are time window constraints for the UAV to perform a taskConstraints (13) (14) and (15) are the constraints of decisionvariables
4 Algorithm
ALNS is an extension of the large neighborhood searchalgorithm and is first proposed by Ropke and Pisinger [24]which has been widely employed for solving complex vehiclerouting problems [25 26] The main procedure of ALNS isillustrated in Algorithm 1 The ALNS starts from an initialfeasible solution and conducts iteratively search for bettersolutionsThe initial feasible solution is usually generated by aconstructive heuristic In each iteration the current solutionis destroyed and repaired by heuristics which are selectedbased on their past performances
41 The Heuristic Algorithm for Constructing an InitialSolution The heuristic algorithm for generating an initialsolution aims to rapidly construct a feasible solution whichincludes four main steps First weapons are assigned to eachtarget according to its damage requirements based on someheuristic rules Second the targets are clustered to the depotsthrough the clustering strategies Third a complete tour isconstructed to visit all the targets assigned to a depot Finallythe feasible flight path for each UAV is constructed
411 Weapon Allocation Strategy The weapon assignmentstrategy is to determine the type and quantity of weaponsused to attack the target and meet its damage requirement
Journal of Advanced Transportation 5
Input 119886119894 119887119894119898 for 119894 isin 119873 119898 isin 119882Output 119908119886119905119894119898 the number of weapon119898 assigned to target 119894
Set 119908119886119905119894119898 = 0 (119898 isin 119882)119898lowast = argmax119887119894119898 119898 isin 119882119908119886119905119894119898lowast = lfloor119886119894119887119894119898lowastrfloor1198981015840 = argmin119891119898 | 119898 isin 119882 and 119886119894 minus 119908119886119905119894119898lowast119887119894119898lowast minus 119887119894119898 le 01199081198861199051198941198981015840++
Return 119908119886119905119894119898 (119898 isin 119882)
Algorithm 2 Procedure of the assigning strategy based on destroy effect
Inputeff119894119898 the cost-effectiveness ratio of weaponm against target 119894119902119898 the weight of weapon119898119898 isin 119882119888 the UAVrsquos payload119892 the number of hanging points in the UAVOutput119908119886119905119894119898 the number of weapon119898 assigned to target 119894Set 119862119882119867 = minus1 119908119886119905119894119898 = 0 (119898 isin 119882)while (119862119882119867 lt 0) do
119898lowast = argmaxeff119894119898 119898 isin 119882119908119886119905119894119898lowast = lceil119886119894119887119894119898lowastrceilif (sum119872119898=1 119902119898119908119886119905119894119898 le 119888 and sum
119872119898=1 119908119886119905119894119898 le 119892) then
119862119882119867 = 1endelse
119908119886119905119894119898lowast = 0119882 = 119882119898lowast
endendReturn 119908119886119905119894119898 (119898 isin 119882)
Algorithm 3 Procedure of the assigning strategy based on cost-effectiveness
Two strategies are designed to dispose and assign weapons tothe targets
(a) Assigning Strategy Based on Destroy Effect The assigningstrategy based on destroy effect is to select the weapon withthe highest destroy effect on the target and assign it to thetarget The main procedure is illustrated in Algorithm 2
(b) Assigning Strategy Based on Cost-Effectiveness In theassigning strategy based on cost-effectiveness a measure-ment named as ldquocost-effectivenessrdquo is introduced as follows
eff119894119898 =119887119894119898119891119898
(16)
The weapon with the highest ldquocost-effectivenessrdquo is pref-erentially selected and assigned to the target The main pro-cedure for the assigning strategy based on cost-effectivenessis illustrated in Algorithm 3
412 Target Clustering Strategy Three target clusteringstrategies are designed for assigning targets to each depot
which are distance based clustering greedy search clusteringand virtual feedback clustering
(a) Distance Based Clustering (DC) The basic idea of theDC strategy is to assign each target to its closest depot Thedistance between each target point and each depot is firstcalculated and then the targets are clustered to their closestdepot
(b) Greedy Search Clustering (GSC) In the GSC strategy eachdepot is first allowed to select one target randomly and thenthe target closest to the selected target is addedThe operationis repeated until all targets are assigned to the appropriatedepots The GSC strategy is illustrated in Figure 2
(c) Virtual Feedback Clustering (VFC) The basic idea of theVFC strategy is to assume that there is a virtual depot aroundthe known depots and all UAVs performing the strikingtask are from the virtual depot We can obtain 119878 a set ofpath planning schemes for multiple UAVs departing fromthe virtual depot In addition 119878 = 1199041 1199042 119904119906 where 119906denotes the quantity of UAVs usedThen the virtual depot ischanged to the actual depot for each route in 119878The total flying
6 Journal of Advanced Transportation
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Figure 2 The operation process for the GSC strategy
distance is computed every time after the depot is changedThe targets corresponding to the changing scheme with theshortest distance are assigned to the appropriate depots Theabove operation is repeated until all elements in set 119878 areassigned
413 Target Sequencing Strategy The target sequencing strat-egy aims to determine the sequence in which the UAV visitsthe targets subject to their time windows There are fourstrategies for sequencing the targets which are sequencingbased on distance (SD) sequencing based on earliest strikingtime (SEST) sequencing based on latest striking time (SLST)and sequencing based on time window width (STWW) TheSD strategy aims to sort all targets by the distance to the depotin an ascending order AUAVfirst visits the closest target andthen the next target at a longer distance after departing fromthe depot The UAV visits the remaining targets in the samemanner until all targets are visited The SEST strategy is tovisit all targets in an ascending order by the earliest strikingtime of the target that is the targets with earlier striking timeshould be attacked earlier In the SLST strategy all targets arevisited in a descending order of the latest striking time The
STWW strategy is to visit all targets in an ascending order ofthe time window width
414 Feasible Route Construction (FRC) In this step afeasible route for each UAV is constructed while consider-ing the constraints on endurance payload the number ofhanging points in UAV and the time window of the targetThe main procedure of the FRC algorithm is presented inAlgorithm 4
The basic idea of FRC is to let a UAV depart from thedepot and visit the targets one by one The total weight andquantity of the weapons carried by the UAV and its totalactual flight time are calculated when it arrives at a targetThen constraints (5) (6) (9) (11) and (12) are checked andthe target is added to the UAVrsquos route if all these constraintsare satisfied If any constraint is not met the UAV returns tothe depot and the target is assigned to a new UAV and itsroute The operation is repeated until all targets are visited
42 Neighbourhood Structures In ALNS the neighborhoodstructures are employed to slightly diversify the starting point
Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 5
Input 119886119894 119887119894119898 for 119894 isin 119873 119898 isin 119882Output 119908119886119905119894119898 the number of weapon119898 assigned to target 119894
Set 119908119886119905119894119898 = 0 (119898 isin 119882)119898lowast = argmax119887119894119898 119898 isin 119882119908119886119905119894119898lowast = lfloor119886119894119887119894119898lowastrfloor1198981015840 = argmin119891119898 | 119898 isin 119882 and 119886119894 minus 119908119886119905119894119898lowast119887119894119898lowast minus 119887119894119898 le 01199081198861199051198941198981015840++
Return 119908119886119905119894119898 (119898 isin 119882)
Algorithm 2 Procedure of the assigning strategy based on destroy effect
Inputeff119894119898 the cost-effectiveness ratio of weaponm against target 119894119902119898 the weight of weapon119898119898 isin 119882119888 the UAVrsquos payload119892 the number of hanging points in the UAVOutput119908119886119905119894119898 the number of weapon119898 assigned to target 119894Set 119862119882119867 = minus1 119908119886119905119894119898 = 0 (119898 isin 119882)while (119862119882119867 lt 0) do
119898lowast = argmaxeff119894119898 119898 isin 119882119908119886119905119894119898lowast = lceil119886119894119887119894119898lowastrceilif (sum119872119898=1 119902119898119908119886119905119894119898 le 119888 and sum
119872119898=1 119908119886119905119894119898 le 119892) then
119862119882119867 = 1endelse
119908119886119905119894119898lowast = 0119882 = 119882119898lowast
endendReturn 119908119886119905119894119898 (119898 isin 119882)
Algorithm 3 Procedure of the assigning strategy based on cost-effectiveness
Two strategies are designed to dispose and assign weapons tothe targets
(a) Assigning Strategy Based on Destroy Effect The assigningstrategy based on destroy effect is to select the weapon withthe highest destroy effect on the target and assign it to thetarget The main procedure is illustrated in Algorithm 2
(b) Assigning Strategy Based on Cost-Effectiveness In theassigning strategy based on cost-effectiveness a measure-ment named as ldquocost-effectivenessrdquo is introduced as follows
eff119894119898 =119887119894119898119891119898
(16)
The weapon with the highest ldquocost-effectivenessrdquo is pref-erentially selected and assigned to the target The main pro-cedure for the assigning strategy based on cost-effectivenessis illustrated in Algorithm 3
412 Target Clustering Strategy Three target clusteringstrategies are designed for assigning targets to each depot
which are distance based clustering greedy search clusteringand virtual feedback clustering
(a) Distance Based Clustering (DC) The basic idea of theDC strategy is to assign each target to its closest depot Thedistance between each target point and each depot is firstcalculated and then the targets are clustered to their closestdepot
(b) Greedy Search Clustering (GSC) In the GSC strategy eachdepot is first allowed to select one target randomly and thenthe target closest to the selected target is addedThe operationis repeated until all targets are assigned to the appropriatedepots The GSC strategy is illustrated in Figure 2
(c) Virtual Feedback Clustering (VFC) The basic idea of theVFC strategy is to assume that there is a virtual depot aroundthe known depots and all UAVs performing the strikingtask are from the virtual depot We can obtain 119878 a set ofpath planning schemes for multiple UAVs departing fromthe virtual depot In addition 119878 = 1199041 1199042 119904119906 where 119906denotes the quantity of UAVs usedThen the virtual depot ischanged to the actual depot for each route in 119878The total flying
6 Journal of Advanced Transportation
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Figure 2 The operation process for the GSC strategy
distance is computed every time after the depot is changedThe targets corresponding to the changing scheme with theshortest distance are assigned to the appropriate depots Theabove operation is repeated until all elements in set 119878 areassigned
413 Target Sequencing Strategy The target sequencing strat-egy aims to determine the sequence in which the UAV visitsthe targets subject to their time windows There are fourstrategies for sequencing the targets which are sequencingbased on distance (SD) sequencing based on earliest strikingtime (SEST) sequencing based on latest striking time (SLST)and sequencing based on time window width (STWW) TheSD strategy aims to sort all targets by the distance to the depotin an ascending order AUAVfirst visits the closest target andthen the next target at a longer distance after departing fromthe depot The UAV visits the remaining targets in the samemanner until all targets are visited The SEST strategy is tovisit all targets in an ascending order by the earliest strikingtime of the target that is the targets with earlier striking timeshould be attacked earlier In the SLST strategy all targets arevisited in a descending order of the latest striking time The
STWW strategy is to visit all targets in an ascending order ofthe time window width
414 Feasible Route Construction (FRC) In this step afeasible route for each UAV is constructed while consider-ing the constraints on endurance payload the number ofhanging points in UAV and the time window of the targetThe main procedure of the FRC algorithm is presented inAlgorithm 4
The basic idea of FRC is to let a UAV depart from thedepot and visit the targets one by one The total weight andquantity of the weapons carried by the UAV and its totalactual flight time are calculated when it arrives at a targetThen constraints (5) (6) (9) (11) and (12) are checked andthe target is added to the UAVrsquos route if all these constraintsare satisfied If any constraint is not met the UAV returns tothe depot and the target is assigned to a new UAV and itsroute The operation is repeated until all targets are visited
42 Neighbourhood Structures In ALNS the neighborhoodstructures are employed to slightly diversify the starting point
Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Journal of Advanced Transportation
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Depot(1) Depot(2)
T6
T9
T3
T10T11
T1 T2 T4
T5
T7
T8T12
Figure 2 The operation process for the GSC strategy
distance is computed every time after the depot is changedThe targets corresponding to the changing scheme with theshortest distance are assigned to the appropriate depots Theabove operation is repeated until all elements in set 119878 areassigned
413 Target Sequencing Strategy The target sequencing strat-egy aims to determine the sequence in which the UAV visitsthe targets subject to their time windows There are fourstrategies for sequencing the targets which are sequencingbased on distance (SD) sequencing based on earliest strikingtime (SEST) sequencing based on latest striking time (SLST)and sequencing based on time window width (STWW) TheSD strategy aims to sort all targets by the distance to the depotin an ascending order AUAVfirst visits the closest target andthen the next target at a longer distance after departing fromthe depot The UAV visits the remaining targets in the samemanner until all targets are visited The SEST strategy is tovisit all targets in an ascending order by the earliest strikingtime of the target that is the targets with earlier striking timeshould be attacked earlier In the SLST strategy all targets arevisited in a descending order of the latest striking time The
STWW strategy is to visit all targets in an ascending order ofthe time window width
414 Feasible Route Construction (FRC) In this step afeasible route for each UAV is constructed while consider-ing the constraints on endurance payload the number ofhanging points in UAV and the time window of the targetThe main procedure of the FRC algorithm is presented inAlgorithm 4
The basic idea of FRC is to let a UAV depart from thedepot and visit the targets one by one The total weight andquantity of the weapons carried by the UAV and its totalactual flight time are calculated when it arrives at a targetThen constraints (5) (6) (9) (11) and (12) are checked andthe target is added to the UAVrsquos route if all these constraintsare satisfied If any constraint is not met the UAV returns tothe depot and the target is assigned to a new UAV and itsroute The operation is repeated until all targets are visited
42 Neighbourhood Structures In ALNS the neighborhoodstructures are employed to slightly diversify the starting point
Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 7
Input119899 the total number of targets119864(5+119882)times119899 the basic information matrix related with the target The firstline (119864[0 119899]) of the matrix is the targetrsquos number The second line (119864[1 119899]) ofthe matrix stores the earliest allowed strike time of the target The third line(119864[2 119899]) of the matrix stores the targetrsquos latest hit time The fourthline (119864[3 119899]) of the matrix stores the target time that UCAV hit the goal Thefifth line (119864[4 119899]) of the matrix stores the time it takes UCAV to fly to thetarget The sixth line (119864[5 119899]) of the matrix stores the time it takes UCAV to flyfrom the previous target to the target The seventh line (119864[6 119899]) of the matrixstores the total number of weapons assigned to the target The eighthline (119864[7 119899]) stores the total weight of the weapon assigned to the target point119888119906119898119898119879119900119863119890119901119900119905 time accumulated from depot to target 119894 and 1198941015840 to depot119888119906119898119898119879119900119873119890119909119905 time accumulated from target 119894 to target 1198941015840119888119906119898119898119864119909119890119888119906119905119890 total time for all target points visited by UAV119888119906119898119898119882119890119886119901119900119899 the total numbers of weapons after visiting all targets119888119906119898119898Weight The total weight of weapons after visiting all targets119890119899119889119906119903 UAV endurance119901119886119910119897119900119886119889 UAV maximum payloadℎ119886119903119889119901119900119894119899119905 The number of UAV hanging points119899119906119898119880119862119860119881 The number of UAVOutput120577 A matrix set containing 119899119906119898119880119862119860119881 number of new information matrix119864V4times(119886minus119887) where V = 1 2 119899119906119898119880119860119881
Set 119886 = 119899 119887 = 0 119899119906119898119880119860119881 = 1 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0 119888119906119898119898119864119909119890119888119906119905119890 = 0while (119887 lt 119899 minus 1) do
while (119888119906119898119898 lt 119890119899119889119906119903) dofor (119894 = 119887 119894 lt 119886 119894 + +) do
119888119906119898119898119864119909119890119888119906119905119890 = 119888119906119898119898119864119909119890119888119906119905119890 + 119864[3 119894] 119888119906119898119898119879119900119863119890119901119900119905 = 119864[4 119887] + 119864[4 119886 minus 1]119888119906119898119898119879119900119873119890119909119905 = 119888119906119898119898119879119900119873119890119909119905 + 119864[5 119894] 119888119906119898119898119882119890119886119901119900119899 = 119888119906119898119898119882119890119886119901119900119899 + 119864[6 119894]119888119906119898119898Weight = 119888119906119898119898Weight + 119864[7 119894]
end119888119906119898119898 = 119888119906119898119898119864119909119890119888119906119905119890 + 119888119906119898119898119879119900119863119890119901119900119905 + 119888119906119898119898119879119900119873119890119909119905If (119888119906119898119898119882119890119886119901119900119899 gt ℎ119886119903119889119901119900119894119899119905 or 119888119906119898119898Weight gt 119901119886119910119897119900119886119889 or
119888119906119898119898 ge 119890119899119889119906119903 or 119888119906119898119898-119864[4 119886 minus 1] lt 119864[1 119886 minus 1] or 119888119906119898119898-119864[4 119886 minus 1] gt 119864[2 119886 minus 1])do
119886 minus minus 119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0119888119906119898119898119882119890119886119901119900119899 = 0 119888119906119898119898Weight = 0
endelse
119887 = 119886 119899119906119898119880119862119860119881 + + 119886 = 119899Output a new encoding matrix 119864V
4times(119886minus119887)end
end119888119906119898119898119864119909119890119888119906119905119890 = 0 119888119906119898119898119879119900119863119890119901119900119905 = 0 119888119906119898119898119879119900119873119890119909119905 = 0
endReturn 120577
Algorithm 4 Procedure of the FRC algorithm
of local search In this section six neighborhood structuresare designed for effectively searching the solution space
(a) Depot Exchanging (DE) In the DE operator firstly onedepot is selected randomly and one flight route is alsoselected from the routes starting at this depot In this way weselect119898 depots and119898 routesThen the depots corresponding
to the 119898 selected routes are exchanged We further verifywhether the new routes satisfy the constraints on enduranceof the UAV and the time windows of the targets If theconstraints aremet a new solution is obtainedThedepots areexchanged again if any constraint is not satisfied The abovesteps are repeated until a new feasible solution is obtainedIt should be noted that it is impossible to guarantee that
8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Journal of Advanced Transportation
eachDE operation obtains an improved feasible solution andsometimes it is even not possible to obtain a feasible solution
(b) Targets Reclustering (TRC) The TRC operator is toconstruct a new feasible solution by reclustering all targetnodes When the targets are reclustered target sequencingand feasible route construction strategies in the above sectionare conducted to generate a new solution
(c) Weapons Reconfiguration (WR) The basic idea of the WRoperator is to first delete the weapon assignment schemes for119896 (1 le 119896 lt 119899) targets and invoke the appropriate weaponallocation strategies to reassign weapons for these targets Anew weapon assignment scheme follows the ldquodeletionrdquo andldquoreassignmentrdquo operations
(d) Reducing the Number of Weapons (RNW) The basic ideaof the RNW structure is to reduce the total cost by adjustingthe quantity of weapons assigned to the target In the RNWstructure we first select the target with the most weaponsThen the type and number of weapons assigned to this targetare changed in an attempt to reduce the quantity of weaponsIf the RNW operation successfully reduces the quantity ofweapons at a target it provides potentials for reducing thecost ofweapons the quantity ofUAVs and the flying distance
(e) Reducing the Cost ofWeapons (RCW)The basic idea of theRCW structure is to reduce the total cost by replacing high-cost weapons with low-cost weapons In the RCW structurewe first select the target with the highest cost of weaponsin the weapon assignment schemes and then attempt toreplace the high-cost weapons with combination of low-costweapons It should be noted that the RCW operation cannotguarantee that the weapon exchange always reduces the totalcost For example the cost of weapons at a target may belowered and in the same time the weight and number of theweapons at this target may increase which may make thevalue of the objective increase
(f) Reducing the Weight of Weapons (RWW) The RWWstructure is a variant of the RCW structure Its basic ideais to reduce the quantity of weapons and thus improvethe objective by replacing the heavy weapons with relativelylighter weapons in the weapon assignment schemes In theRWW structure we first select the target with the highestweight of weapons and then attempt to replace the heav-iest weapons with relatively lighter weapons The damagerequirements for the target point must be verified when theweapons are being replaced In other words the adjustedweapon assignment schemes shouldmeet Constraints (5) and(7)
43 Adaptive Learning Strategy The six neighborhood struc-tures provide potentials to improve a solution from differentperspectives The first neighborhood structure DE mayimprove the solution by adjusting the UAV flight loopThe second neighborhood structure TRC may improvethe solution by changing the depot The third to sixthneighborhood structures WR RNW RCW and RWW
may improve the solution by adjusting the weapon assign-ment scheme Different neighborhood structures may leadto different improvement results To achieve more exten-sive neighborhood search this section presents an adap-tive learning strategy to dynamically adjust the weightsof the six structures during the neighborhood searchprocess
The six neighborhood structures are randomly selectedto adjust the solution under the ldquorouletterdquo principle Giventhe weights of the neighborhood structures119908119894 (119894 = 1 6)the probability of structure 119895 to be selected is 120596119895sum
ℎ119894=1 120596119894
Theweights of the six neighborhood structures are adaptivelyupdated every 120593119890V119900 iteration by evaluating their performancein these earlier 120593119890V119900 iterations We note 120593119890V119900 iterations asan evaluation segment Assuming the initial weight of everyneighborhood structure is 1 in the 119895th evolution the weightof structure 119894 is as follows
120596119894119895+1 = 120596119894119895 (1 minus 119903) + 119903120590119894119895120576119894119895 (17)
where 119903 (119903 isin [0 1]) is a constant 120576119894119895 is the number of timesthe neighborhood structure 119894 is invoked in the 119895th evolutionand 120590119894119895 is the score of the neighborhood structure 119894 in the 119895thevolution
The neighborhood structure 119894 in the 119895th evolution isscored according to the following scoring rules
(1) 1205900119894119895 = 0 the initial score of structure 119894 (119894 = 1 2 6)at the beginning of the 119895th evaluation is set to be 0
(2) 1205901119894119895 = 30 30 scores are added to structure 119894 if the newsolution is the best one generated in the 119895th evolution
(3) 1205901119894119895 = 20 20 scores are added to structure 119894 if the newsolution is better than the average one generated in the 119895thevolution
(4) 1205901119894119895 = 10 10 scores are added to structure 119894 if the newsolution is worse than the average one generated in the 119895thevolution
(5) 1205901119894119895 = 5 5 scores are added to structure 119894 if the newsolution is better than the worst one generated in the 119895thevolution but can be accepted by the algorithm
44 Acceptance Standard and Criteria for Termination
441 Acceptance Standard for Solutions In the ALNS algo-rithm the acceptance standard for the generated solutionsis defined on the basis of the record-to-record algorithmproposed by Dueck [27] It is assumed that 119892lowast is the objectivefunction value of the current optimal solution called recordIt is assumed that 120575 is the difference between the objectivefunction value of the current solution and 119892lowast called devia-tion
It is assumed that119877 is the solution1198771015840 is the neighborhoodsolution to 119877 and 1198921198771015840 is the objective function value of1198771015840
When 1198921198771015840 lt 119892lowast + 120575 the neighborhood solution 1198771015840 can beaccepted where 120575 = 01 times 119892lowast And 119892lowast is only allowed to beupdated when 1198921198771015840 lt 119892lowast
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
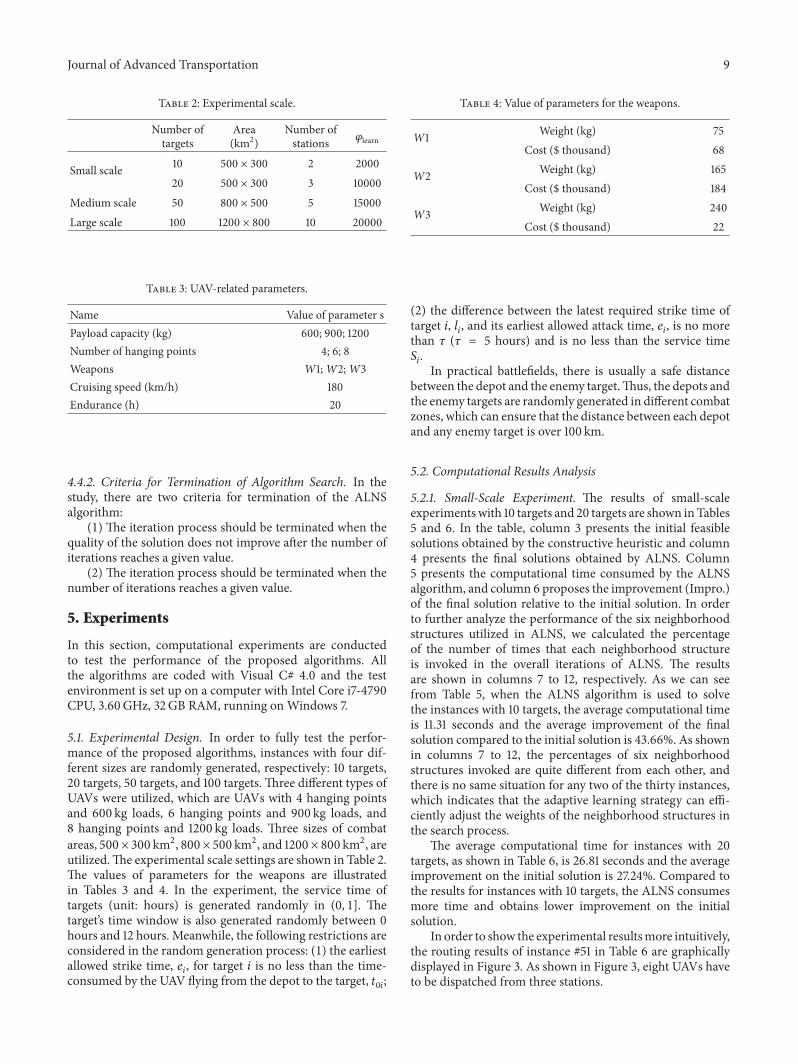
Journal of Advanced Transportation 9
Table 2 Experimental scale
Number oftargets
Area(km2)
Number ofstations 120593learn
Small scale 10 500 times 300 2 200020 500 times 300 3 10000
Medium scale 50 800 times 500 5 15000Large scale 100 1200 times 800 10 20000
Table 3 UAV-related parameters
Name Value of parameter sPayload capacity (kg) 600 900 1200Number of hanging points 4 6 8Weapons W1W2W3Cruising speed (kmh) 180Endurance (h) 20
442 Criteria for Termination of Algorithm Search In thestudy there are two criteria for termination of the ALNSalgorithm
(1)The iteration process should be terminated when thequality of the solution does not improve after the number ofiterations reaches a given value
(2)The iteration process should be terminated when thenumber of iterations reaches a given value
5 Experiments
In this section computational experiments are conductedto test the performance of the proposed algorithms Allthe algorithms are coded with Visual C 40 and the testenvironment is set up on a computer with Intel Core i7-4790CPU 360GHz 32GB RAM running on Windows 7
51 Experimental Design In order to fully test the perfor-mance of the proposed algorithms instances with four dif-ferent sizes are randomly generated respectively 10 targets20 targets 50 targets and 100 targets Three different types ofUAVs were utilized which are UAVs with 4 hanging pointsand 600 kg loads 6 hanging points and 900 kg loads and8 hanging points and 1200 kg loads Three sizes of combatareas 500times 300 km2 800times 500 km2 and 1200times 800 km2 areutilizedThe experimental scale settings are shown in Table 2The values of parameters for the weapons are illustratedin Tables 3 and 4 In the experiment the service time oftargets (unit hours) is generated randomly in (0 1] Thetargetrsquos time window is also generated randomly between 0hours and 12 hours Meanwhile the following restrictions areconsidered in the random generation process (1) the earliestallowed strike time 119890119894 for target 119894 is no less than the time-consumed by the UAV flying from the depot to the target 1199050119894
Table 4 Value of parameters for the weapons
W1 Weight (kg) 75Cost ($ thousand) 68
W2 Weight (kg) 165Cost ($ thousand) 184
W3 Weight (kg) 240Cost ($ thousand) 22
(2) the difference between the latest required strike time oftarget 119894 119897119894 and its earliest allowed attack time 119890119894 is no morethan 120591 (120591 = 5 hours) and is no less than the service time119878119894
In practical battlefields there is usually a safe distancebetween the depot and the enemy targetThus the depots andthe enemy targets are randomly generated in different combatzones which can ensure that the distance between each depotand any enemy target is over 100 km
52 Computational Results Analysis
521 Small-Scale Experiment The results of small-scaleexperimentswith 10 targets and 20 targets are shown inTables5 and 6 In the table column 3 presents the initial feasiblesolutions obtained by the constructive heuristic and column4 presents the final solutions obtained by ALNS Column5 presents the computational time consumed by the ALNSalgorithm and column 6 proposes the improvement (Impro)of the final solution relative to the initial solution In orderto further analyze the performance of the six neighborhoodstructures utilized in ALNS we calculated the percentageof the number of times that each neighborhood structureis invoked in the overall iterations of ALNS The resultsare shown in columns 7 to 12 respectively As we can seefrom Table 5 when the ALNS algorithm is used to solvethe instances with 10 targets the average computational timeis 1131 seconds and the average improvement of the finalsolution compared to the initial solution is 4366 As shownin columns 7 to 12 the percentages of six neighborhoodstructures invoked are quite different from each other andthere is no same situation for any two of the thirty instanceswhich indicates that the adaptive learning strategy can effi-ciently adjust the weights of the neighborhood structures inthe search process
The average computational time for instances with 20targets as shown in Table 6 is 2681 seconds and the averageimprovement on the initial solution is 2724 Compared tothe results for instances with 10 targets the ALNS consumesmore time and obtains lower improvement on the initialsolution
In order to show the experimental resultsmore intuitivelythe routing results of instance 51 in Table 6 are graphicallydisplayed in Figure 3 As shown in Figure 3 eight UAVs haveto be dispatched from three stations
10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Journal of Advanced Transportation
Table5Ex
perim
entalresultsforinstances
with
10targets
UAVcapacity
No
Initial
solutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
DE
TRC
WR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
1503times106
318times106
1320
3676
2080
1986
1778
1457
1390
1308
2580times106
360times106
1180
3799
1474
1946
1828
1608
1742
1402
3599times106
310times106
1342
4810
1533
1816
1973
1596
1565
1517
4495times106
305times106
1057
3839
1231
1651
1986
1936
1683
1511
5508times106
339times106
967
3322
1069
1698
1783
1840
1857
1754
6622times106
390times106
1270
3725
914
1718
1974
1574
1873
1946
7549times106
369times106
1058
3266
1483
1896
1866
1380
1841
1534
8589times106
383times106
1321
3492
1379
2173
1773
1441
1829
1405
9574times106
335times106
932
4160
1555
1597
1798
1559
1493
1998
10550times106
355times106
1169
3549
2157
1617
1952
1325
1438
1510
6hang
ingpo
ints
andload
of900k
g
11597times106
315times106
1009
4719
515
1991
1900
1729
1944
1922
12639times106
325times106
905
4906
1293
1582
1847
1982
1674
1622
13670times106
373times106
963
4431
1281
1909
1947
1744
1477
1643
1476
5times106
417times106
978
4550
2033
1884
1462
1417
1689
1515
15571times106
311times106
1223
4547
854
1836
1957
1728
1723
1902
16673times106
328times106
1374
5124
2204
1863
1687
1590
1306
1350
17644
times106
345times106
955
4635
1426
1492
1801
1389
1925
1968
18650times106
341times106
1127
4751
2364
1813
1466
1362
1588
1408
19608times106
313times106
972
4849
1621
1932
1631
1681
1431
1703
20639times106
347times106
934
4560
2063
1923
1830
1525
1346
1313
8hang
ingpo
ints
andd
load
of1200
kg
21662times106
347times106
946
4751
1701
1669
1802
1728
1588
1512
22664times106
385times106
1331
4201
1970
1729
1594
1325
1560
1822
2372
4times106
395times106
1174
4547
1760
1433
1603
1837
1980
1387
24668times106
397times106
1305
4045
1288
1421
1613
1923
1914
1840
2575
6times106
399times106
1197
4716
2057
1855
1364
1426
1945
1353
26654times106
344
times106
1312
4727
1919
1333
1644
1964
1517
1622
27632times106
359times106
1299
4315
2402
1715
1651
1355
1527
1350
2872
2times106
344
times106
1067
5234
1481
1932
1577
1746
1505
1759
29679times106
380times106
1091
4399
2274
1530
1349
1920
1592
1335
3076
3times106
356times106
1162
5325
1265
1363
1658
1886
1919
1909
Average
1131
4366
Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 11
Table6Ex
perim
entalresultsforinstances
with
20targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
3192
9times106
799times106
2508
1406
1496
1945
2251
1357
1261
1689
3299
5times106
786times106
2948
2095
1385
2327
1955
1619
1036
1679
3395
2times106
753times106
3099
2086
1681
2579
1906
1731
1147
956
3498
3times106
807times106
2295
1794
1511
2105
2503
1784
1196
900
3590
9times106
728times106
2739
1982
1211
2115
2534
1145
983
2012
3691
2times106
777times106
2727
1472
1526
2253
2528
1609
1420
663
3710
1times107
876times106
2581
1379
1549
2381
2207
1052
1149
1663
3898
4times106
820times106
3067
1673
1863
2215
2206
1750
883
1083
39889times106
801times106
2786
996
1365
2704
2204
1633
1036
1059
40847times106
729times106
2757
1390
1596
2204
2295
1618
1139
1148
6hang
ingpo
ints
andload
of900k
g
4112
0times107
960times106
3070
2060
1162
2700
1825
1718
1149
1446
4212
9times107
979times106
2409
2431
1692
2251
2538
1722
1360
438
4313
3times107
934times106
2289
3009
1846
2341
1280
1521
1779
1234
4413
3times107
826times106
2350
3828
1697
1844
2467
1607
1129
1257
45119times107
912times106
2676
2352
1607
2229
2309
1216
1154
1485
46110times107
850times106
3074
2307
1826
1921
2569
1615
1217
850
4712
7times107
856times106
2503
3266
1638
2177
2193
1711
1304
977
4812
6times107
101times
107
2480
2074
1449
2674
2269
1424
1199
985
49118times107
849times106
2608
2857
1857
2777
2250
1333
1457
326
5013
2times107
894times106
2454
3252
1615
2693
2009
1152
1144
1387
8hang
ingpo
ints
andload
of1200
kg
5114
3times107
995times106
2652
3051
1549
2587
2120
1128
1192
1424
5215
2times107
948times106
3054
3789
1806
2597
2402
800
1544
852
5314
5times107
101times
107
2407
3003
1664
2698
2241
1401
1148
849
5413
7times107
837times106
2708
3904
1672
2659
2111
1201
1221
1136
5514
5times107
905times106
2682
3754
1494
2446
2083
831
1315
1831
5614
4times107
957times106
2777
3348
1716
2476
2344
1091
1725
649
5715
7times107
884times106
2261
4382
1791
2526
1704
917
1160
1903
5815
2times107
709times106
2985
5348
1555
2712
1833
1731
1001
1169
5915
2times107
934times106
2419
3855
1810
2668
2302
971
1269
980
6015
7times107
101times
107
3057
3582
1822
2398
1740
948
1067
2027
Average
2681
2724
12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

12 Journal of Advanced Transportation
10
1811
13
19
9
1612
14 2
205
177
6
4 3
1
158
Y
Depot(2)Depot(3)
[212 303]
[232 314]
[358 413]
[187 231]
[195 274]
[267 385]
[192 247]
[230 322]
[175 233]
[202 294] [307 391]
[221 307][192 245]
[221 297]
[241 351]
[221 298]
[202 291]
[227 302]
[247 341]
Target[a b] Time window
Depot
Depot(1)00
5000
10000
15000
20000
25000
30000
3000020000 40000 500001000000X
Figure 3 An illustration of the routing results for instance 51
522 Medium-Scale and Large-Scale Experiments FromTables 5 and 6 we can see that the performance of ALNSon improving the initial solution decreases as the problemscale increases when the total number of iterations remainsunchanged In order to get better results the number ofiterations 120593learn is increased as the problem size increasesand we set 120593learn = 15000 for solving instances with 50 targetsand set cases 120593learn = 20000 for solving instances with 100targets
The results are presented in Tables 7 and 8 As we cansee from Table 7 when ALNS algorithm is used to solve theinstances with 50 targets the average computational time ofthe algorithm is 6055 seconds and the average improvementof the final solution compared to the initial solution is 1925The results for instances with 100 targets in Table 8 show thatthe average calculation time is 20613 seconds and the averageimprovement (Impro) of the final solution compared to theinitial solution is 1954
The computational time for the heuristic to constructinitial feasible solution is less than one second and thuswe donot report the detailed time for all instances The maximumcomputational time for the instance with 100 targets is 22837seconds which is acceptable for mission planning in currentwars For most of the instances the ALNS can make goodimprovement on their initial solutions which indicates thatthe solution obtained by the ALNS is relatively better andcan satisfy the requirement of practical mission planningWenote that the improvement on some instances is less than 10and the similarity of these instances is that the UAV utilizedin them has 4 hanging points and a payload of 600 kg Wecan see that the combination scale for solving these instancesis lower and the constructive heuristic can present a betterinitial solution which provides a better start point for theALNS Thus although the ALNS may find a relative goodsolution its improvement compared to the initial solution isnot so big
6 Summary
This paper focuses on the mathematical model and solutionalgorithm design for a multidepot UAV routing problemwith consideration of weapon configuration in UAV and timewindow of the target A four-step heuristic is designed toconstruct an initial feasible solution and then the ALNSalgorithm is proposed to find better solutions Experimentsfor instances with different scales indicate that the con-structive heuristic can obtain a feasible solution in onesecond and the ALNS algorithm can efficiently improve thequality of the solutions For the largest instances with 100targets the proposed algorithms can present a relative goodsolution within 4 minutes Thus the overall performance ofthe algorithm can satisfy the practical requirement of com-manders for military mission planning of UAVs in currentwars
The UAV routing problem with weapon configurationand time window is new extension on the traditionalvehicle routing problem and there are many new topicsrequired to study in future research More efficient algo-rithms should be developed and compared with the ALNSalgorithm which is a broad and hard research As theproblem considered in this paper is quite complicatedthere are no benchmark instances that consider exactlythe same situation in literatures Thus we generate ran-dom instance based on practical military operation rules totest the proposed algorithm In next research benchmarkinstances from practical military applications need to beconstructed and used to test the performance of differentalgorithms
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
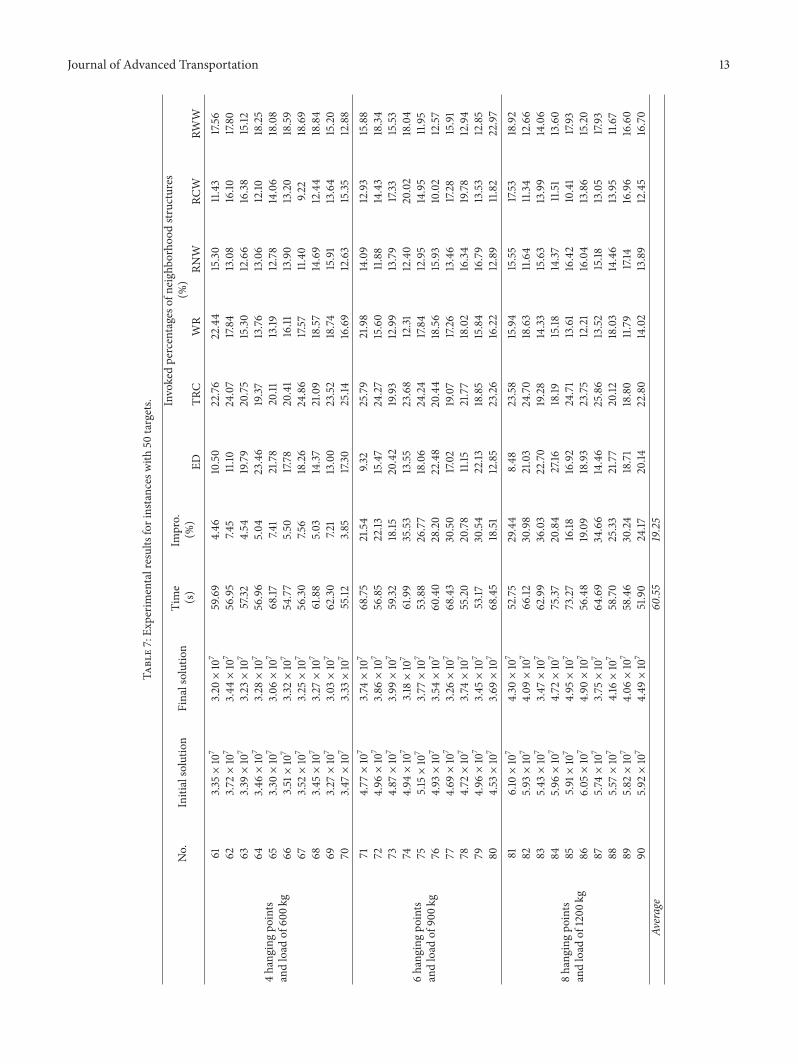
Journal of Advanced Transportation 13
Table7Ex
perim
entalresultsforinstances
with
50targets
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
6133
5times107
320times107
5969
446
1050
2276
2244
1530
1143
1756
62372times107
344
times107
5695
745
1110
2407
1784
1308
1610
1780
63339times107
323times107
5732
454
1979
2075
1530
1266
1638
1512
64346times107
328times107
5696
504
2346
1937
1376
1306
1210
1825
65330times107
306times107
6817
741
2178
2011
1319
1278
1406
1808
6635
1times107
332times107
5477
550
1778
2041
1611
1390
1320
1859
67352times107
325times107
5630
756
1826
2486
1757
1140
922
1869
68345times107
327times107
6188
503
1437
2109
1857
1469
1244
1884
69327times107
303times107
6230
721
1300
2352
1874
1591
1364
1520
70347times107
333times107
5512
385
1730
2514
1669
1263
1535
1288
6hang
ingpo
ints
andload
of900k
g
71477times107
374times107
6875
2154
932
2579
2198
1409
1293
1588
72496times107
386times107
5685
2213
1547
2427
1560
1188
1443
1834
73487times107
399times107
5932
1815
2042
1993
1299
1379
1733
1553
74494times107
318times107
6199
3553
1355
2368
1231
1240
2002
1804
75515times107
377times107
5388
2677
1806
2424
1784
1295
1495
1195
76493times107
354times107
6040
2820
2248
2044
1856
1593
1002
1257
77469times107
326times107
6843
3050
1702
1907
1726
1346
1728
1591
78472times107
374times107
5520
2078
1115
2177
1802
1634
1978
1294
79496times107
345times107
5317
3054
2213
1885
1584
1679
1353
1285
80453times107
369times107
6845
1851
1285
2326
1622
1289
1182
2297
8hang
ingpo
ints
andload
of1200
kg
81610times107
430times107
5275
2944
848
2358
1594
1555
1753
1892
82593times107
409times107
6612
3098
2103
2470
1863
1164
1134
1266
83543times107
347times107
6299
3603
2270
1928
1433
1563
1399
1406
84596times107
472times107
7537
2084
2716
1819
1518
1437
1151
1360
85591times107
495times107
7327
1618
1692
2471
1361
1642
1041
1793
86605times107
490times107
5648
1909
1893
2375
1221
1604
1386
1520
87574times107
375times107
6469
3466
1446
2586
1352
1518
1305
1793
88557times107
416times107
5870
2533
2177
2012
1803
1446
1395
1167
89582times107
406times107
5846
3024
1871
1880
1179
1714
1696
1660
90592times107
449times107
5190
2417
2014
2280
1402
1389
1245
1670
Average
6055
1925
14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

14 Journal of Advanced Transportation
Table8Ex
perim
entalresultsforinstances
with
100targets
Mou
ntingcapacity
No
Initialsolutio
nFinalsolution
Time
(s)
Impro
()
Invokedpercentageso
fneighbo
rhoo
dstructures
()
EDTR
CWR
RNW
RCW
RWW
4hang
ingpo
ints
andload
of60
0kg
91733times107
683times107
20443
676
2118
1528
1809
1289
1732
1524
92801times107
725times107
20593
935
1654
1649
1626
1645
1623
1803
93851times107
782times107
2117
0806
1948
1534
1449
1461
2155
1453
9478
9times107
737times107
22081
653
1471
2119
1430
1758
1508
1714
9579
1times107
729times107
2197
478
51644
1699
1839
1744
1953
1121
96804times107
731times
107
2173
491
21787
1310
1975
1545
1868
1517
97711times
107
650times107
19237
856
1344
2088
1749
1878
1349
1593
98755times107
688times107
19887
887
2091
1470
1429
1750
1319
1941
9977
1times107
699times107
19400
925
1553
1560
1796
1588
1779
1725
100
780times107
723times107
20240
727
1587
2067
1663
1769
1305
1609
6hang
ingpo
ints
andload
of900k
g
101
118times108
882times107
22535
2531
1843
1851
1448
1859
1209
1791
102
117times108
826times107
2199
12976
1323
2182
1290
1540
1713
1952
103
109times108
964times107
21312
1215
1509
1512
1707
1700
1722
1848
104
122times108
889times107
22837
2759
1845
1226
1970
1729
1378
1852
105
115times108
909times107
1914
52132
1963
1389
1766
1759
1763
1361
106
110times108
743times107
22258
3301
1578
2192
1489
1447
1988
1306
107
114times108
888times107
22252
2242
2129
2088
1736
1213
1423
1411
108
107times108
890times107
21535
1720
2116
1981
1218
1909
1202
1573
109
117times108
869times107
18088
2576
1427
2096
1956
1842
1960
718
110111times
108
741times
107
22802
3378
1523
1216
1577
2221
1909
1554
8hang
ingpo
ints
andload
of1200
kg
111
109times108
844
times107
18316
2287
1992
1884
1968
1615
1372
1169
112
118times108
954times107
21202
1954
1576
1467
1571
1965
1535
1885
113
123times108
786times107
1992
33635
1291
1266
1786
1513
1583
2561
114114times108
810times107
22206
2923
1814
1815
1313
1675
1649
1735
115
124times108
101times
108
19409
1898
1528
1908
1669
1503
1862
1530
116117times108
942times107
19235
2010
2179
1618
1502
1280
1889
1532
117111times
108
722times107
1817
93477
1487
1541
1475
2246
1544
1707
118118times108
957times107
2118
11930
1956
2063
1306
1444
1262
1969
119114times108
860times107
18632
2514
1696
2116
1386
1580
1913
1309
120
118times108
833times107
18589
2990
1688
1685
1806
1991
1456
1374
Average
20613
1954
Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Advanced Transportation 15
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
The research is supported by the National Natural ScienceFoundation of China (no 71771215 no 71471174 and no71471175)
References
[1] C Kurkcu and K Oveyik ldquoUS Unmanned Aerial Vehicles(UAVs) and Network Centric Warfare (NCW) Impacts onCombat Aviation Tactics from Gulf War I Through 2007 IraqrdquoThesis Collection 2008
[2] RW FoxUAVs Holy Grail for Intel Panacea for RSTA orMuchAdo about Nothing UAVs for theOperational Commander 1998
[3] J R Dixon UAV Employment in Kosovo Lessons for theOperational Commander Uav Employment in Kosovo Lessonsfor the Operational Commander 2000
[4] D A Fulghum Kosovo Conflict Spurred New Airborne Technol-ogy Use Aviation Week amp Space Technology 1999
[5] J Garamone Unmanned Aerial Vehicles Proving Their Worthover Afghanistan Army Communicator 2002
[6] C Xu H Duan and F Liu ldquoChaotic artificial bee colonyapproach to Uninhabited Combat Air Vehicle (UCAV) pathplanningrdquo Aerospace Science and Technology vol 14 no 8 pp535ndash541 2010
[7] E Edison and T Shima ldquoIntegrated task assignment and pathoptimization for cooperating uninhabited aerial vehicles usinggenetic algorithmsrdquo Computers amp Operations Research vol 38no 1 pp 340ndash356 2011
[8] B Zhang W Liu Z Mao J Liu and L Shen ldquoCooperativeand geometric learning algorithm (CGLA) for path planning ofUAVs with limited informationrdquo Automatica vol 50 no 3 pp809ndash820 2014
[9] S Moon D H Shim and E Oh Cooperative Task Assignmentand Path Planning for Multiple UAVs Springer Amesterdamthe Netherlands 2015
[10] P Yang K Tang J A Lozano and X Cao ldquoPath planningfor single unmanned aerial vehicle by separately evolvingwaypointsrdquo IEEE Transactions on Robotics vol 31 no 5 pp1130ndash1146 2015
[11] V K Shetty M Sudit and R Nagi ldquoPriority-based assignmentand routing of a fleet of unmanned combat aerial vehiclesrdquoComputers amp Operations Research vol 35 no 6 pp 1813ndash18282008
[12] F Mufalli R Batta and R Nagi ldquoSimultaneous sensor selectionand routing of unmanned aerial vehicles for complex missionplansrdquo Computers amp Operations Research vol 39 no 11 pp2787ndash2799 2012
[13] X Liu Z Peng L Zhang and L Li ldquoUnmanned aerial vehicleroute planning for traffic information collectionrdquo Journal ofTransportation Systems Engineering amp Information Technologyvol 12 no 1 pp 91ndash97 2012
[14] T Moyo and F D Plessis ldquoThe use of the travelling salesmanproblem to optimise power line inspectionsrdquo in Proceedings ofthe 6th Robotics andMechatronics Conference pp 99ndash104 IEEEOctober 2013
[15] F Guerriero R Surace V Loscrı and E Natalizio ldquoA multi-objective approach for unmanned aerial vehicle routing prob-lem with soft time windows constraintsrdquo Applied MathematicalModelling vol 38 no 3 pp 839ndash852 2014
[16] L Evers T Dollevoet A I Barros and H Monsuur ldquoRobustUAVmission planningrdquoAnnals of Operations Research vol 222no 1 pp 293ndash315 2014
[17] Z Luo Z Liu and J Shi ldquoA two-echelon cooperated routingproblem for a ground vehicle and its carried unmanned aerialvehiclerdquo Sensors vol 17 no 5 2017
[18] M R Ghalenoei H Hajimirsadeghi and C Lucas ldquoDiscreteinvasive weed optimization algorithm application to coop-erative multiple task assignment of UAVsrdquo in Proceedings ofthe 48th IEEE Conference on Decision and Control held jointlywith 28th Chinese Control Conference pp 1665ndash1670 IEEEDecember 2009
[19] J George P B Sujit and J B Sousa ldquoSearch strategies formultipleUAV search and destroymissionsrdquo Journal of Intelligentamp Robotic Systems vol 61 no 1ndash4 pp 355ndash367 2011
[20] L Zhong Q Luo D Wen S-D Qiao J-M Shi and W-MZhang ldquoA task assignment algorithm formultiple aerial vehiclesto attack targets with dynamic valuesrdquo IEEE Transactions onIntelligent Transportation Systems vol 14 no 1 pp 236ndash2482013
[21] X Hu H Ma Q Ye and H Luo ldquoHierarchical method of taskassignment for multiple cooperating UAV teamsrdquo Journal ofSystems Engineering and Electronics vol 26 no 5 Article ID7347860 pp 1000ndash1009 2015
[22] G Y Yin S L Zhou J C Mo M C Cao and Y H KangldquoMultiple task assignment for cooperating unmanned aerialvehicles using multi-objective particle swarm optimizationrdquoComputer amp Modernization no 252 pp 7ndash11 2016
[23] L Jin ldquoResearch on distributed task allocation algorithmfor unmanned aerial vehicles based on consensus theoryrdquo inProceedings of the 28th Chinese Control andDecision Conferencepp 4892ndash4897 May 2016
[24] S Ropke and D Pisinger ldquoAn adaptive large neighborhoodsearch heuristic for the pickup and delivery problem with timewindowsrdquo Transportation Science vol 40 no 4 pp 455ndash4722006
[25] N Azi M Gendreau and J-Y Potvin ldquoAn adaptive large neigh-borhood search for a vehicle routing problem with multipleroutesrdquoComputers ampOperations Research vol 41 no 1 pp 167ndash173 2014
[26] A Bortfeldt T Hahn D Mannel and L Monch ldquoHybridalgorithms for the vehicle routing problem with clusteredbackhauls and 3D loading constraintsrdquo European Journal ofOperational Research vol 243 no 1 pp 82ndash96 2015
[27] G Dueck ldquoNew optimization heuristics the great delugealgorithm and the record-to-record travelrdquo Journal of Compu-tational Physics vol 104 no 1 pp 86ndash92 1993
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom