Multi-Role Armament & Ammunition System (MRAAS) Weapon …€¦ · Control Request For Proposal:...
21
1 Multi-Role Armament & Ammunition System (MRAAS) Weapon Stabilization Assessment United Defense L.P. Armament Systems Division Minneapolis, MN Gregory S. Johnson Jerry C. Chang Jeffrey V. Ireland Rickie L. Stuva Thomas R. Williams 37 th Gun and Ammunition NDIA Symposium
Transcript of Multi-Role Armament & Ammunition System (MRAAS) Weapon …€¦ · Control Request For Proposal:...

1
Multi-Role Armament &Ammunition System (MRAAS)
Weapon StabilizationAssessment
United Defense L.P.Armament Systems Division
Minneapolis, MN
Gregory S. JohnsonJerry C. Chang
Jeffrey V. IrelandRickie L. Stuva
Thomas R. Williams
37th Gun and Ammunition NDIA Symposium

2
Contents
• Background• Main Objectives• Requirements• Vehicle Dynamics Model• Gun Pointing Control System Model• Stochastic Pointing Error Estimation• Platform Stability Analysis• Gun Pointing Stiffness Study• Conclusions
+

3
Background
• U.S. Army Transformationrequires transition to highlytransportable fighting force.
• The Future Combat System (FCS)is the intended objective -“system of systems” to meet avariety of missions.
• Multi-Role Armament &Ammunition System (MRAAS)under development by U.S. ArmyARDEC to meet FCS LOS DirectFire and BLOS/NLOS IndirectFire lethality requirements.
MRAAS Multi-Mission ATD features:• Turret Mission Module for integration
into light vehicle• 105 mm cannon with swing chamber• CTA munitions for direct/indirect fires• LOS kills out to 4-5 km, BLOS kills out
to 50+ km• C-130 transportable, with 19 ton total
system weight.
MRAAS Study ConceptMRAAS Study Concept

4
Main Objectives
As part of 6 Month MRAAS Concepting Study Contract:
• Determine system dynamics impact of integrating a largecaliber gun system onto a lightweight ground vehicle.
• Evaluate weapon stabilization performance of MRAAS,including sensitivity to:• Gun unbalance due to CG offset from trunnion axis.• Disturbances due to vehicle motion over terrain.

5
• Per the MRAAS Turret Mission Module – WeaponControl Request For Proposal:• Fire Control System shall support LOS engagements under
dynamic conditions with no greater than θtotal mils error, 1 sigmaRoot Mean Square (RMS).
• Muzzle stabilization error shall be no more than θstab mils RMS.• Indirect fire requirements less stringent.
• Dynamic Condition Assumptions:• Fire On The Move vehicle speed varied 5 to 30 mph.• APG Munson Gravel Course and RRC-9 Stabilization Bump
Course terrain models used to span roughness.
Requirements

6
Vehicle Dynamics Model:Vehicle Concepting
Key Assumptions:• MRAAS turret concept mounted in mid and rear locations on wheeled
chassis, with balanced/unbalanced armament (CG forward of trunnion).• Appropriate mass property and space claim adjustments made:
UnbalanceMost Signicant
Effect ForStabilization
Concept Turret Location Gun UnbalanceI Rear UnbalancedII Rear BalancedIII Mid UnbalancedIV Mid Balanced
Unbalanced GunWEAPON COMPARTMENT CREWPOWER
PACKWEAPON
COMPARTMENTWEAPON
COMPARTMENT CREWCREWPOWER PACK
POWER PACK
WEAPON COMPARTMENT
CREW POWER PACK
WEAPON COMPARTMENT
WEAPON COMPARTMENT
CREWCREW POWER PACK
POWER PACK
Concepts I & II Concepts III & IVTrunnion Brg
Tipping Assy CG
Balanced Gun

7
Vehicle Dynamics Model:DADS Development
Key Vehicle Dynamics Assumptions:• DADS rigid body chassis model.• Simplified wheeled suspension model
capturing hydropneumatic non-linearstiffness and damping characteristics• Heave natural freq. ~ 1.5 Hz (translation)• Pitch natural freq. ~ 0.75 Hz (rotation)• Near critical damping• Tire stiffness & damping.
Fn1Fn2Fn3Fn4
Fs4 Fs3 Fs2 Fs1
Traverse Brg Axis Trunnion Brg
Axis
HSU Stiffness, Damping
Tire StiffnessW
Fn1Fn2Fn3Fn4
Fs4 Fs3 Fs2 Fs1
Traverse Brg Axis Trunnion Brg
Axis
HSU Stiffness, Damping
Tire StiffnessW
Vehicle Dynamics Free Body DiagramVehicle Dynamics Free Body Diagram
MRAAS DADS Wheeled Suspension ModelModified HSU Stiffness Characteristics
-20000
-15000
-10000
-5000
0
5000
10000
15000
20000
-20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0 15.0
Wheel Travel [in]
Sp
rin
g F
orc
e [l
b]
Front Stations
Rear Stations
Jounce Rebound
Approx. Static Position
Bump Stops
MRAAS DADS Vehicle Suspension ModelModified HSU Damping Characteristics
-1500
-1000
-500
0
500
1000
1500
2000
-60 -50 -40 -30 -20 -10 0 10 20
Wheel Travel Velocity [in/s]
Dam
pin
g F
orc
e [l
b]
Front Stations
Rear Stations
Jounce
Rebound
Suspension Stiffness CharacteristicsSuspension Stiffness Characteristics Suspension Damping CharacteristicsSuspension Damping Characteristics

8
Vehicle Dynamics Model:DADS Platform Disturbance Estimate
• Vehicle Pitch RateDisturbance PowerSpectral Density(PSD)
MRAS Gun Pointing Disturbance: Concept IATC RRC-9 Stabilization Bump Course, 9/01 Model Update
0.0000001
0.000001
0.00001
0.0001
0.001
0.01
0.1
1
0.1 1 10 100
Frequency [Hz]
Hea
ve A
ccel
erat
ion
Dis
turb
ance
PS
D [
g2 /H
z]
5 MPH
10 MPH20 MPH
30 MPH
MRAS Gun Pointing Disturbance: Concept IATC RRC-9 Stabilization Bump Course, 9/01 Model Update
0.01
0.1
1
10
100
1000
10000
100000
0.1 1 10 100
Frequency [Hz]
Pitc
h R
ate
Dis
turb
ance
PS
D [
mra
d2 /s
2 /Hz] 5 MPH
10 MPH
20 MPH
30 MPH
• Vehicle HeaveAccelerationDisturbance PSD

9
Gun Pointing Control System Model:MATRIXx Development
• Preliminary Elevation GPCS Model created in MATRIXx.• Outer Gyro Rate P+I Loop (inertial) wrapped around
Inner Motor Rate P+I loop (relative).• MATRIXx model includes:
• Plant dynamics with variable drive compliance, gear reduction• P+I compensation with notch filter• Hull rate feed forward sensor with roll-off.
MATRIXx Elevation GPCS Block DiagramMATRIXx Elevation GPCS Block Diagram

10
0.1 1 10 100
Frequency [Hz]
-30
Gai
n [d
B]
Dist Rejection W/OutHull Rate Feed Fwd
Gun Pointing Control System Model:GPCS Disturbance Rejection Estimate
• MATRIXx model usedto estimate platformdisturbance rejectiontransfer function.
• Hull rate feed forwardprovides substantiallygreater rejection at lowfrequency.
0.1 1 10 100
Frequency [Hz]
Gai
n [d
B]
-80
Dist Rejection WithHull Rate Feed Fwd
)(
)()(
ωθ
ωθω
dist
errG &&
=)(
)()(
ωθ
ωθω
dist
errG &&
=

11
0 dB
|G(ω)|
ωbw
TERRAIN PROFILE
VEHICLEDYNAMICS
MODEL
GPCSELEVATIONRESPONSE
RMS
POWERSPECTRALDENSITY
GPCS ELEV.RATE LOOP
DISTURBANCEREJECTION
T.F.
HEAVEDISTURBANCE
)(tzT&&
PITCHDISTURBANCE
)(tvθ&&)(ωθdistS &VEHICLE CHARACTERISTICS:
- GEOMETRY- MASS PROPERTIES- SUSPENSION STIFFNESS- SUSPENSION DAMPING
bwω
ELEV. RATEDISTURBANCE PSD
)()(
)(ωθωθ
ωdisterrG &&
=
RMSθ
GPCS ELEV RATELOOP BANDWIDTH
ELEVATION 1σPOINTING
ACCURACY
ESTIMATED GPCSREJECTION RESPONSE
)( xZ
0 dB
|G(ω)|
ωbw
TERRAIN PROFILE
VEHICLEDYNAMICS
MODEL
GPCSELEVATIONRESPONSE
RMS
POWERSPECTRALDENSITY
GPCS ELEV.RATE LOOP
DISTURBANCEREJECTION
T.F.
HEAVEDISTURBANCE
)(tzT&&
PITCHDISTURBANCE
)(tvθ&&)(ωθdistS &VEHICLE CHARACTERISTICS:
- GEOMETRY- MASS PROPERTIES- SUSPENSION STIFFNESS- SUSPENSION DAMPING
bwω
ELEV. RATEDISTURBANCE PSD
)()(
)(ωθωθ
ωdisterrG &&
=
RMSθ
GPCS ELEV RATELOOP BANDWIDTH
ELEVATION 1σPOINTING
ACCURACY
ESTIMATED GPCSREJECTION RESPONSE
)( xZ
Stochastic Pointing Error Estimation
MRAS Gun Pointing Disturbance: Concept IATC RRC-9 Stabilization Bump Course, 9/01 Model Update
0.01
0.1
1
10
100
1000
10000
100000
0.1 1 1 0 100
Frequency [Hz]
Pit
ch R
ate
Dis
turb
ance
PS
D [m
rad2 /s
2/H
z] 5 MPH
10 MPH
20 MPH
30 MPH

12
MRAAS Gun Pointing Control Bandwidth AnalysisConcept I (Unbalanced Gun, Rear Turret)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.1 1 10 100
Elevation Rate Loop Bandwidth [Hz]
Pre
dic
ted
Ele
vati
on
Po
inti
ng
Acc
ura
cy
[mra
d, R
MS
]
5 MPH (Gravel Course)
5 MPH (Bump Course)
10 MPH (Gravel Course)
10 MPH (Bump Course)
20 MPH (Gravel Course)
20 MPH (Bump Course)
30 MPH (Gravel Course)
30 MPH (Bump Course)
Stochastic Error Estimation:Concept I Sensitivity to Terrain, Speed
5

13
MRAAS Gun Pointing Control Bandwidth AnalysisConcept II (Balanced Gun, Rear Turret)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.1 1 10 100
Elevation Rate Loop Bandwidth [Hz]
Pre
dic
ted
Ele
vati
on
Po
inti
ng
Acc
ura
cy
[mra
d, R
MS
]
5 MPH (Gravel Course)
5 MPH (Bump Course)
10 MPH (Gravel Course)
10 MPH (Bump Course)
20 MPH (Gravel Course)
20 MPH (Bump Course)
30 MPH (Gravel Course)
30 MPH (Bump Course)
Stochastic Error Estimation:Concept II Sensitivity to Terrain, Speed
5

14
Platform Stability Analysis
• Stochastic method appropriate forconcept-level parametric trades.• Allows rapid assessment of multiple
simulation scenarios.• Assumes load motion does not
significantly influence base motion(gun and chassis are uncoupled).
• Next level of fidelity involvescoupling MATRIXx pointing controlmodel with DADS suspension modelvia DADS/Plant.
• Resulting “Platform Stability” modelused to:• Analytically verify stochastic method• Estimate gun drive power requirements
using Concepts I & II.
MRAAS MATRIXx GPCS ModelMRAAS MATRIXx GPCS Model
MRAAS Rigid Body DADS ModelMRAAS Rigid Body DADS Model
DADS/PlantDADS/PlantControl Forces& Torques
MotionFeedback
MRAAS MATRIXx GPCS ModelMRAAS MATRIXx GPCS Model
MRAAS Rigid Body DADS ModelMRAAS Rigid Body DADS Model
DADS/PlantDADS/PlantControl Forces& Torques
MotionFeedback

15
MRAAS Gun Pointing Control Bandwidth AnalysisConcept II (Balanced Gun, Rear Turret)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
1 10 100
Elevation Rate Loop Bandwidth [Hz]
Pre
dic
ted
Ele
vati
on
Po
inti
ng
Acc
ura
cy [
mra
d,
RM
S]
5 MPH (Bump Course)
10 MPH (Bump Course)
20 MPH (Bump Course)
30 MPH (Bump Course)
30 MPH (Bump, MATRIXx)
20 MPH (Bump, MATRIXx)
10 MPH (Bump, MATRIXx)
5 MPH (Bump. MATRIXx)
STOCHASTIC
DADS/PLANT
METHOD
1 10 100
Elevation Rate Loop Bandwidth [Hz]
Platform Stability Analysis:Stochastic Method Verification, Concept I
• Unbalanced Gun
• Balanced Gun
MRAAS Gun Pointing Control Bandwidth AnalysisConcept I (Unbalanced Gun, Rear Turret)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
1 10 100
Elevation Rate Loop Bandwidth [Hz]
Pre
dic
ted
Ele
vati
on
Po
inti
ng
Acc
ura
cy
[mra
d, R
MS
]
5 MPH (Bump Course)
10 MPH (Bump Course)
20 MPH (Bump Course)
30 MPH (Bump Course)
5 MPH (Bump. MATRIXx)
10 MPH (Bump, MATRIXx)
20 MPH (Bump, MATRIXx)
30 MPH (Bump, MATRIXx)
STOCHASTIC
DADS/PLANT
METHOD
1 10 100
Elevation Rate Loop Bandwidth [Hz]

16
Platform Stability Analysis:Elevation Drive Power Estimation
MRAAS Weapon Stabilization Power Estimation RRC-9 Bump Course, 10 Hz 1st Mode, 70% Assumed Overall Efficiency
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
0 5 10 15 20 25 30 35
Vehicle Speed [mph]
To
tal M
oto
r P
ow
er R
equ
ired
[HP
]
Slew Accel = 1.0 rad/s2
Slew Accel = 0.67 rad/s2
Slew Accel = 0.5 rad/s2
Slew Accel = 1.0 rad/s2
Slew Accel = 0.67 rad/s2
Slew Accel = 0.5 rad/s2
Model I: Unbalanced Gun
Model II: Balanced Gun
Low Slew Accel
Med Slew Accel
High Slew Accel
Low Slew Accel
Med Slew Accel
High Slew Accel
MRAAS Weapon Stabilization Power Estimation RRC-9 Bump Course, 10 Hz 1st Mode, 70% Assumed Overall Efficiency
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
0 5 10 15 20 25 30 35
Vehicle Speed [mph]
To
tal M
oto
r P
ow
er R
equ
ired
[HP
]
Slew Accel = 1.0 rad/s2
Slew Accel = 0.67 rad/s2
Slew Accel = 0.5 rad/s2
Slew Accel = 1.0 rad/s2
Slew Accel = 0.67 rad/s2
Slew Accel = 0.5 rad/s2
Model I: Unbalanced Gun
Model II: Balanced Gun
Low Slew Accel
Med Slew Accel
High Slew Accel
Low Slew Accel
Med Slew Accel
High Slew Accel
( ) maxω×++= stabaccelunbalanceTotalP ΤΤΤ

17
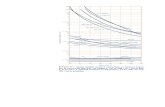
MRAAS Gun Pointing Stiffness SensitivityEffective First Mode vs Gun Drive Stiffness
0
1
2
3
4
5
6
7
8
1.00E+05 1.00E+06 1.00E+07 1.00E+08 1.00E+09 1.00E+10 1.00E+11
Effective Drive Stiffness (in-lb/rad, Actuator+Mount Lugs+Turret)
Short
Long
Short WithTube Sprt.
Gun Mount Configuration
Gu
n P
oin
tin
g F
irst
Mo
de
Effective Drive Stiffness
MRAAS Gun Pointing Stiffness SensitivityEffective First Mode vs Gun Drive Stiffness
0
1
2
3
4
5
6
7
8
1.00E+05 1.00E+06 1.00E+07 1.00E+08 1.00E+09 1.00E+10 1.00E+11
Effective Drive Stiffness (in-lb/rad, Actuator+Mount Lugs+Turret)
Short
Long
Short WithTube Sprt.
Gun Mount Configuration
Gu
n P
oin
tin
g F
irst
Mo
de
Gu
n P
oin
tin
g F
irst
Mo
de
Effective Drive Stiffness
Gun Pointing Stiffness Study
• Minimum 1st natural frequency of the gun pointing system isconstrained by the controller bandwidth.
• The gun pointing system natural frequency is determined by theflexibility of: Gun Drive Actuators, Turret, Gun Mount, Cannon
A parametric study using aNASTRAN FEM was usedto investigate first modesensitivity to:
• Elevation Drive Stiffness• Mount/Cannon Stiffness• Mount Extension Length• Mount Bearing Locations
NASTRAN Armament Finite Element ModelNASTRAN Armament Finite Element Model

18
DADS/Plant Flexible BodyDemonstration
Active Gun Pointing WithArmament Structural Flexure
APG RRC-9 Stabilization Course
Platform Stability Analysis Demo:DADS/Plant w/Stabilized Flex Body
MRAAS DADS Model withFlexible Body Armament
MRAAS DADS Model withFlexible Body Armament
DADS/PlantDADS/Plant
MRAAS MATRIXx GPCS ModelMRAAS MATRIXx GPCS Model
Control Forces& Torques
MotionFeedback
NASTRAN Modal AnalysisNASTRAN Modal Analysis
DADS Flexible BodyTranslator
DADS Flexible BodyTranslator

19
Platform Stability Analysis Demo:DADS/Plant - Stabilized Flexible Body

20
Conclusions
• Stochastic error estimation method provided rapid concept-levelgun pointing performance estimation.
• Reducing gun CG offset from trunnion could reduce req’mts for:• Bandwidth & pointing stiffness by up to 25%• Maximum drive power by up to 50%• Trunnion vertical accelerometer (vertical acceleration feed forward).
• Parametric FEA modeling used for early estimation of optimalgun pointing component stiffnesses.
• Coupled modeling approach provided improved fidelity byleveraging subsystem models.
• Next step is to incorporate a Muzzle Reference Sensor witharmament flexure response in the pointing control model.
• Using this approach, the disturbance rejection benefit of an activesuspension system can also be evaluated.

21
Acknowledgements
• Study Co-Authors:• Jerry Chang, DADS Vehicle Dynamics• Rick Stuva, Gun Pointing Control Analysis• Jeff Ireland, Tech Consulting/Pointing Stiffness• Tom Williams, Parametric FEA
• This study was initiated and funded by the U.S. ArmyARDEC under Contract DAAE30-00-C-1060.
• The authors would like to thank Steven McDonald,Roger Kent, Ramon Espinosa, and Thomas Louzeiro atPicatinny Arsenal; and Stephen Krupski at Benet Labsfor their timely assistance, suggestions, and feedback.