Motorcycle cornering behavior modeling - Paper
14
Proceedings of the XIV International Symposium on Dynamic Problems of Mechanics (DINAME 2011). Donadio, R. N., ABCM, São Sebastião, SP, Brazil, March 13th - March 18th, 2011. [email protected] Motorcycle cornering behavior modeling. Rafael Donadio 1 Roberto Bortolussi 1 1 Centro Universitário da FEI Abstract: The market for motorcycles has been showing a continuous increase in sales in last years. This result is driven by the change of perception by the consumers not to despise the two-wheeled vehicle as a transport. Fuel economy, parking easiness and speed of locomotion confirm the absorption of this product on the market. But the growth of scientific research in motorcycles dynamics do not grow in the same market rate, making it an issue to be exploited to improve the safety of the rider or assist in new projects development. This work uses a multi body motorcycle model containing 4 rigid bodies connected by revolution joints parameterized by 7 degrees of freedom. The model includes the major geometric and inertial characteristics of the motorcycle. It was used in the mathematical model nonlinear algebraic equations. The model is subjected to curvilinear trajectory with constant radius and speed, allowing to know the behavior of the motorcycle on a steady state maneuver, using two input parameters imposed by the pilot: angle of steering and roll angle. The simulation results are discussed and presented in graphical form. Aiming to validate the mathematical model, using an instrumented motorcycle with data acquisition equipment and comparing the actual values with those obtained in the mathematical model. Keywords: Motorcycle lateral dynamics. Multi body system. Steady state cornering. Data acquisition NOMENCLATURE reference coordinates systems: (X, Y, Z) = ground coordinate system (X 1 , Y 1 , Z 1 ) = rotating coordinate system (1) (x d , y d , z d ) = front reference coordinate system (x t , y t , z t ) = rear reference coordinate system a = mechanical trail A = origin of coordinate system (t) a g = centre of mass acceleration a n = front wheel normal trail a t = tire trail b t = longitudinal position of rear centre of mass C = turning centre point d = coordinate system (d) d p = forward displacement of the tire contact point e d = eccentricity of front centre of mass E d = front tire longitudinal force E t = rear tire longitudinal force F = lateral force F A = aerodynamic force on the rear frame F D = aerodynamic drag force F d = lateral front tire force F Gd = gravity forces on the front frame F Gt = gravity forces on the rear frame F L = aerodynamic lift force F Pd = road reaction, front F Pt = road reaction, rear F S = aerodynamic side force F t = lateral rear tire force g = acceleration due to gravity G d = front center of mass G t = rear center of mass h t = height of rear centre of mass I CXZd , I CYZd = components of inertia tensor of front frame with respect to (X 1 , Y 1 , Z 1 ) I CXZt , I CYZt = components of inertia tensor of rear frame with respect to (X 1 , Y 1 , Z 1 ) I wd = front wheel inertia I wt = rear wheel inertia I xd , I yd , I zd = components of inertia tensor of front frame with respect to (x f , y f , z f ) I xt , I yt , I zt = components of inertia tensor of rear frame with respect to (x t , y t , z t ) K d = angular momentum of the front frame K t = angular momentum of the rear frame K Wd = angular moment of the front wheels K Wt = angular moment of the rear wheels l z = z d position of front centre of mass m = total motorcycle mass M A = torque of aerodynamic forces M Ax , M Ay , M Az = components of aerodynamic torque m d = front mass M Gd = torques of gravity forces, front frame M Gt = torques of gravity forces, rear frame M Rd = torques of reaction forces, front M Rt = torques of reaction forces, rear m t = rear mass M Tz = twisting torque Mx = overturning torque M xd , M yd , M zd = torques on front wheel M xt , M yt , M zt = torques on rear wheel M y = rolling resistance torque M z = yaw torque N = vertical force N d = front wheel load N t = rear wheel load p = wheelbase P d = front tire contact point P t = rear tire contact point Q = point on steering axis R = circle radius R d = front wheel radii R Gd = path radius of front centre of mass with respect to (X 1 , Y 1 , Z 1 ) R Gt = path radius of rear centre of mass with respect to (X 1 , Y 1 , Z 1 ) R t = rear wheel radii S = longitudinal force S d = longitudinal front tire force s p = lateral deformation S t = longitudinal rear tire force t = coordinate system (t) t d = front tire head radii t t = rear tire head radii V = forward speed X Gd , Y Gd , Z Gd = coordinates of centre of mass of front frame in (X 1 , Y 1 , Z 1 ) X Gt , Y Gt , Z Gt = coordinates of centre of mass of front frame in (X 1 , Y 1 , Z 1 )
-
Upload
rafael-donadio -
Category
Documents
-
view
462 -
download
1
description
The market for motorcycles has been showing a continuous increase in sales in last years. This result isdriven by the change of perception by the consumers not to despise the two-wheeled vehicle as a transport. Fueleconomy, parking easiness and speed of locomotion confirm the absorption of this product on the market. But thegrowth of scientific research in motorcycles dynamics do not grow in the same market rate, making it an issue to beexploited to improve the safety of the rider or assist in new projects development. This work uses a multi bodymotorcycle model containing 4 rigid bodies connected by revolution joints parameterized by 7 degrees of freedom.The model includes the major geometric and inertial characteristics of the motorcycle. It was used in themathematical model nonlinear algebraic equations. The model is subjected to curvilinear trajectory with constantradius and speed, allowing to know the behavior of the motorcycle on a steady state maneuver, using two inputparameters imposed by the pilot: angle of steering and roll angle. The simulation results are discussed and presentedin graphical form. Aiming to validate the mathematical model, using an instrumented motorcycle with data acquisitionequipment and comparing the actual values with those obtained in the mathematical model.
Transcript of Motorcycle cornering behavior modeling - Paper

Proceedings of the XIV International Symposium on Dynamic Problems of Mechanics (DINAME 2011). Donadio, R. N., ABCM, São Sebastião, SP, Brazil, March 13th - March 18th, 2011. [email protected]
Motorcycle cornering behavior modeling.
Rafael Donadio1
Roberto Bortolussi1
1 Centro Universitário da FEI
Abstract: The market for motorcycles has been showing a continuous increase in sales in last years. This result is
driven by the change of perception by the consumers not to despise the two-wheeled vehicle as a transport. Fuel
economy, parking easiness and speed of locomotion confirm the absorption of this product on the market. But the
growth of scientific research in motorcycles dynamics do not grow in the same market rate, making it an issue to be
exploited to improve the safety of the rider or assist in new projects development. This work uses a multi body
motorcycle model containing 4 rigid bodies connected by revolution joints parameterized by 7 degrees of freedom.
The model includes the major geometric and inertial characteristics of the motorcycle. It was used in the
mathematical model nonlinear algebraic equations. The model is subjected to curvilinear trajectory with constant
radius and speed, allowing to know the behavior of the motorcycle on a steady state maneuver, using two input
parameters imposed by the pilot: angle of steering and roll angle. The simulation results are discussed and presented
in graphical form. Aiming to validate the mathematical model, using an instrumented motorcycle with data acquisition
equipment and comparing the actual values with those obtained in the mathematical model.
Keywords: Motorcycle lateral dynamics. Multi body system. Steady state cornering. Data acquisition
NOMENCLATURE
reference coordinates systems:
(X, Y, Z) = ground coordinate system
(X1, Y1, Z1) = rotating coordinate
system (1)
(xd, yd, zd) = front reference
coordinate system
(xt, yt, zt) = rear reference coordinate
system
a = mechanical trail
A = origin of coordinate system (t)
ag = centre of mass acceleration
an = front wheel normal trail
at = tire trail
bt = longitudinal position of rear
centre of mass
C = turning centre point
d = coordinate system (d)
dp = forward displacement of the tire
contact point
ed = eccentricity of front centre of
mass
Ed = front tire longitudinal force
Et = rear tire longitudinal force
F = lateral force
FA = aerodynamic force on the rear
frame
FD = aerodynamic drag force
Fd = lateral front tire force
FGd = gravity forces on the front
frame
FGt = gravity forces on the rear frame
FL = aerodynamic lift force
FPd = road reaction, front
FPt = road reaction, rear
FS = aerodynamic side force
Ft = lateral rear tire force
g = acceleration due to gravity
Gd = front center of mass
Gt = rear center of mass
ht = height of rear centre of mass
ICXZd, ICYZd = components of inertia
tensor of front frame with respect
to (X1, Y1, Z1)
ICXZt, ICYZt = components of inertia
tensor of rear frame with respect
to (X1, Y1, Z1)
Iwd = front wheel inertia
Iwt = rear wheel inertia
Ixd, Iyd, Izd = components of inertia
tensor of front frame with respect
to (xf, yf, zf)
Ixt, Iyt, Izt = components of inertia
tensor of rear frame with respect
to (xt, yt, zt)
Kd = angular momentum of the front
frame
Kt = angular momentum of the rear
frame
KWd = angular moment of the front
wheels
KWt = angular moment of the rear
wheels
lz = zd position of front centre of mass
m = total motorcycle mass
MA = torque of aerodynamic forces
MAx, MAy, MAz = components of
aerodynamic torque
md = front mass
MGd = torques of gravity forces, front
frame
MGt = torques of gravity forces, rear
frame
MRd = torques of reaction forces,
front
MRt = torques of reaction forces, rear
mt = rear mass
MTz = twisting torque
Mx = overturning torque
Mxd, Myd, Mzd = torques on front
wheel
Mxt, Myt, Mzt = torques on rear wheel
My = rolling resistance torque
Mz = yaw torque
N = vertical force
Nd = front wheel load
Nt = rear wheel load
p = wheelbase
Pd = front tire contact point
Pt = rear tire contact point
Q = point on steering axis
R = circle radius
Rd = front wheel radii
RGd = path radius of front centre of
mass with respect to (X1, Y1, Z1)
RGt = path radius of rear centre of
mass with respect to (X1, Y1, Z1)
Rt = rear wheel radii
S = longitudinal force
Sd = longitudinal front tire force
sp = lateral deformation
St = longitudinal rear tire force
t = coordinate system (t)
td = front tire head radii
tt = rear tire head radii
V = forward speed
XGd, YGd, ZGd = coordinates of centre
of mass of front frame in (X1, Y1,
Z1)
XGt, YGt, ZGt = coordinates of centre
of mass of front frame in (X1, Y1,
Z1)

Motorcycle cornering behavior modeling [email protected] XPd = coordinates of Pd in (X1, Y1, Z1)
XPt = coordinates of Pt in (X1, Y1, Z1)
YPd = coordinates of Pd in (X1, Y1, Z1)
YPt = coordinates of Pt in (X1, Y1, Z1)
∆ = effective steering angle
δ = steering angle
ε = caster angle
λd = front tire side slip angle
λt = rear tire side slip angle
ρd = front tire centre-line radius
ρt = rear tire centre-line radius
φ = roll angle
Ψ = yaw angle
µ = pitch angle
µ f = rolling friction coefficient
ωd = front wheel spin rate
ωt = rear wheel spin rate
INTRODUCTION
The technical description for one vehicle "single track", as the motorcycle is called in the literature, it is tied to
single impression it leaves behind as it passes over the sand, for example. This peculiarity is the source of everything
that makes the study of the vehicle undeniably complex, and yet at the same time so fascinating.
Another factor is that the means of transport commonly used in day-to-day is so familiar that they are driven with
ease which can essentially be reduced to two vehicle categories, two and four wheels. The first category is the bicycles
and the motorcycles, which are equivalent in cinematic terms and the second the cars, which certainly is the most
studied vehicle today, with extensive bibliography.
A crucial consideration on these vehicles is that when a car is at rest, with or without passengers aboard, it remains
in stable equilibrium. However, a motorcycle upright tends to fall, unless a suitable support or supported by the rider.
A little observation brings to light some fundamental differences in the comparison of the two vehicles in motion:
An inexperienced person driving a motor vehicle, intuitively and quickly realized that when the steering wheel is
turned one direction, the vehicle is oriented in the same direction, so they can drive the car precisely in the direction
they want to go.
However, even an adult inevitably involves potential embarrassment and difficulty associated with attempting to
ride a bike for the first time - beginners are forced to put their feet on the ground, trying to maintain balance while
trying to keep the bike in the right direction. Initially, the bike is ridden supporting themselves with their feet, avoiding
a fall, but after some training, it appears that the faster the bike is conducted, the easier it is to keep it balanced.
Controlling a two-wheeled vehicle is, in fact, nothing simple and intuitive, but there is no doubt that the motorcycle
is a functional means of transport and it is also an exciting source of entertainment.
In the past, some studies were developed using single-track vehicles. Whipple (1899) studied the stability of motion
assuming bicycle with rigid tires. Sharp (1971) was among the first to investigate the stability of the motorcycle using
the tire properties. In 1980, Koenen published a stability study that caters to large lateral accelerations involving large
rolling angles. As the vehicle models became more complex with the interaction between the tire and the ground it was
necessary to develop more detailed tire models. Iffelsberger (1991), Wisselman et al. (1993), Breur (1998), Sharp et al.
(2001) and Berrita et al. (2000) produced works in this direction. In 1999 Cossalter published a work developing
nonlinear dynamic equations in steady state cornering.
Meijaard (2006) presented a single track model with a linear model of four rigid bodies, very close to the model
studied in this work, but the author decided that the tires have ideal contact with the ground (sharp edge). This model
was discarded since it does not slip angles.
The model developed in this paper was presented by Cossalter (1999). In it the motorcycle is modeled with the
nonlinear algebraic equations, considering the lateral and longitudinal slip of the driven wheel. The model presented is
valid for large values of motorcycle roll angle.
Motorcycle inertial and geometric properties, slip curves of the front and rear tire, the kinematic equations and
nonlinear algebraic equations were programmed using the Matlab. Like a motorcycle, the system input is the roll angle
and steering angle. The capacity of acceleration and braking of the motorcycle were discarded because the maneuver is
performed under steady state. The simulation results are represented by graphs where there are the values of angle of
cinematic steering, vertical and lateral force and lateral tire slip angle.
Model description
The motorcycle comprises a system of four rigid bodies: rear structure (including chassis, engine, the fuel tank and
rider), front structure (handlebars and fork) and front and rear wheel, as previously mentioned. The front and rear
structures are connected by a revolution joint. The front and rear wheels are connected respectively to the rear frame
and fork for revolution joints. The effect of front and rear suspension is not taken into account, since in a steady curve
the suspension deflection does not change. The rider is considered a rigid body securely attached to the rear structure.
The aerodynamic force distribution on the motorcycle is: drag, lift, lateral forces (acting at the center of mass of the rear
structure) and three torques.

D.Rafael, B. Roberto
The contact between the tire and the track is described by means of linking. If the wheel slips both in longitudinal
and in lateral, the restrains allow five degrees of freedom (two translational and three rotational). The lateral forces
exerted on the tires around the track are very important in the dynamic and steady state and they are related to slip angle
and roll angle. The front and rear tire side slip are described by λd and λt respectively. In relation to the longitudinal slip,
the front wheel does not slip, not producing longitudinal tire force as the rolling resistance effect was neglected, in
contrast with the rear wheel produces longitudinal tire force causing longitudinal slip (COSSALTER, 2006).
Three coordinate systems are introduced to describe the dynamic properties and kinematics of the vehicle.
Coordinate system t (xt, yt, zt,) as in Figure 1 is fixed to the structure and the rear plane xt, zt is the symmetry plane of
rear structure. When the vehicle is upright and the steering angle is zero, axis xt and yt are on plan horizontally and xt
points straight ahead, zt axis is vertical and points downward, the origin and the point Pt contact the rear wheel overlap.
Figure 1: Motorcycle t coordinate system, in upright position (a) and any position (b).
The coordinate system d (xd, yd, zd), as shown in Figure 2 is fixed on to front structure and it is described as follows:
the source is located at point Q, which is the point of intersection between the axis of rotation of the steering system and
the plane perpendicular to the axis of rotation direction, which passes through the center of the rear wheel axle zd and it
is aligned with the axis of rotation direction pointing downward; yd axis is parallel to the axis of rotation of the front
wheel; axis xd is in the plane of symmetry of the front structure.
Figure 2: Motorcycle geometry and d coordinate system.
Another coordinate system, according Figure 3, which is useful in the development of dynamic equations in steady
state is a rotating coordinate system 1 (X1, Y1, Z1). The source is located in the center of rotation of the motorcycle (C)
The Z1 axis is vertical and points downward (Z axis is parallel to the ground). The axis X1 is in the XY plane and parallel
to symmetry plane of rear structure. The Y1-axis completes the coordinate system.
Pt = A
zt = Z
yt = Y
xt = X
zt
yt
xt
A
µ < 0
Roll angle
φ
Yaw angle
ψPitch angle
µ
bt
Gt
ht
xd
ed
ε
td
Rd
ρd
zd
xtPt
zt
Rt
ρt
tt
Pd
Gd
a fork offset
a b

Motorcycle Cornering Behavior Modeling
Figure 3: Coordinate system 1 and main forces and momentum’s.
Steady state equation
In a steady state cornering, the speed of yaw, the roll, the steering angle and the slip (longitudinal in the rear wheel
and lateral in the rear and front wheels) are constants. Thus, the dynamic equations are composed of algebraic equations.
By Newton's 2nd
Law for the system of four rigid bodies:
��� + ��� + ��� + ��� + �� = � (1)
−�� + � + � cos∆ − �� sin∆ = −����� +�����Ψ�� (2)
�� sin� + �� cos � + �� cos∆ + �� + �� sin∆ = −����� +�����Ψ� � (3)
−�� cos � + �� sin � + �� + �� + �� +��� = 0 (4)
The angular momentum equation around C for the system is:
� + �� + �� + !� + !� = "�� + "�� + "�#� + "�#� (5)
The angular momentum equation is expressed in the form of components in a coordinate system 1, as Cossalter
(1999, p.11).
�$ − ������ cos � + %�� sin�� + ���−%�� cos � + ��� sin�� + ������ +����� + �����+ ����� − &� sin∆ = �'()*� + '()*��Ψ� �
− +'#�,� cos � + '#�,�-cos . cos � − sin�/ + 0� sin . sin �12Ψ� (6)
�& cos � − �3 sin� + ����� cos � − ��%�� − ����� sin � − ������ +����� − �����− ����� + &� cos∆ + &� = −�'(4*� + '(4*��Ψ� � − I67Ψ� ω7 cos�µ+ ε� sin δ (7)
�3 cos � + �& sin� + ����� cos � + ����� sin � + ����� + +������ cos∆ + ��� sin∆�+ ������ sin∆ − Y97 cos∆� + ����� − ����� + *� + *� = 0 (8)
It is necessary to calculate the inertia tensor for front and rear structure with respect to coordinate system 1 (X1, Y1,
Z1):
'(4*� = ����%�� + cos �-�'$� − '3�� cos / sin / + '4*��cos� / − sin� /�1 (9)
'(4*� = ����%�� + :'$� cos� . + '&� sin� . − '3�; cos�/ + 0� sin�/ + 0� cos �+ :'&� − '$�; cos�/ + 0� cos . sin . sin � (10)
X1
Y1
Z1
turning center point C
∆+λt-λd
ψ&turning radius R
λtλd
∆
Nd
Pd
Sd
Fd
ωdGd
mdg
Qsymmetry plane of front
frame
Symmetry plane of rear
framesteering
torquevertical plane
φ
ωt
Ft
St
Nt
Pt
V
mtg
FS
FL
FD
MAz
MAy
MAx
mtRGtψ².
mdRGdψ².
λt λd

D.Rafael, B. Roberto
'()*� = ����%�� + cos � sin ��'*� cos� / + 2'$3� cos / sin /� + cos � sin �:'$� sin� / − '&�; (11)
'()*� = ����%�� + cos � sin � �/ + 0�:'$� − '&�;�cos� � − sin� ��+ cos� sin � +'$�-cos� . sin��/ + 0� − sin� .1=+ '&�-sin� . sin��/ + 0� − cos� .1 + '3� cos��/ + 0�2 (12)
Tire modeling
The forces and moments produced by the tire as Cossalter (2006) are illustrated in the following figures: Figure 4a
forces acting on the intersection point between the plane of symmetry and the track in Figure 4b forces acting on the
point of tire contact Figure 4c and production of the moment Mx, My, Mz.
Figure 4: (a) Forces at the contact point, and the main moments. (b) Forces acting on intersection point between
the plane of symmetry and the track. (c) Tire contact point details.
Longitudinal front wheel slip is zero because the wheel is not driving. The longitudinal force is related to rolling
friction only, the longitudinal force on front tire is determined by:
� = −/>� (13)
The moment of rolling resistance is calculated by:
& = ?@� (14)
The torque Mx (overturning torque) is caused by lateral deformation of the tire sp.
$ = −A@� (15)
As Cossalter (1999) sp displacement is usually small due to high lateral stiffness of the tire, so the moment Mx is
zero. Torque Mz is produced by the lateral force F, longitudinal force (S > 0 propulsion, S < 0 braking) and MTz (twisting
torque):
3 = −��B�� − A@� + C3��� (16)
The first term due to lateral force tends to align the wheel in the direction of movement of the motorcycle. The offset
t (λ), whose distribution depends on the distribution of lateral force is called the tire trail (Figure 1). It is calculated as
the ratio between the torque Mz and lateral force and longitudinal force when the roll angle is zero, a good
approximation according to the experimental results (COSSALTER, 1999):
� = −DE F1 − H BBIJ$HK (17)
The second term of equation 16, because the longitudinal force, just tends to align the wheel if the longitudinal force
is tractive. As the displacement sp is usually very small, this term can be considered zero (COSSALTER, 1999). The
third term is the twisting torque, which arises due to the roll angle and tends to align the wheel. As Cossalter (1999)
assume a linear function based on experimental results, where M1 is 0.024 to front tire and 0.028 to rear tire.
yaw torque
overturning
torque
rolling resistence
torque
NS
F
contact
point
Z
Y
X
φ
P
MzMx
My
NS
F
contact pointY
X
Z
P
MTz
sp
P
NS
Y
X
Z
F
at
dp
a b c

Motorcycle Cornering Behavior Modeling
C3 = L� (18)
Equation solving
The equations are nonlinear (due to the formulas of the tires and kinematic equations) and are solved numerically for
specific values assigned to roll angle and steering angle. First, the tire slips were set equal to zero and the equations
become a linear system of six equations with six unknowns: Nt, Nd, Ft, Fd, St, M� 2. After the first calculation, ignoring the side slip, values of normal and lateral forces are obtained and used for the
side slip angles of front and rear tire. With the slip obtained, the calculation is done again obtaining a new set of lateral
forces, vertical, propulsive force and angular velocity.
The equations were organized to solve the system of the form A.X = B each calculation step is defined by the range
of values attributed to steering and rolling and the value of the six unknowns was obtained.
NOOOOPLL L� LQ LR LS LTULL UL� ULQ ULR ULS ULTVLL VL� VLQ VLR VLS VLT?LL ?L� ?LQ ?LR ?LS ?LTWLL WL� WLQ WLR WLS WLTXLL XL� WLQ XLR XLS XLT Y
ZZZZ[
NOOOOP \���������� YZZZZ[=
NOOOOP����]]^^__`` YZZZZ[ (19)
Due to lack of data related to the tires (the parameters are normally confidential and not published by manufacturers),
the values for forces and side slips were obtained directly from the curve of the tire thus decreasing the error in the
calculation of the forces produced by the tire. Using the Pacejka Magic Formula (2002) these curves were obtained in
tire test equipment and the result is found in Cossalter (2008). The test result allows composing curves as a function of
lateral slip, normalized lateral force (lateral force / vertical force on the tire) and camber angle. These curves have been
programmed along with the other equations. The curves related to the front and rear tire are shown in Figure 5.
Figure 5: (a) front tire side slip curve, (b) rear tire side slip curve
MATERIALS AND METHODS
Aiming to validate the mathematical model used in this study, tests were done using a Suzuki Bandit N650
motorcycle in stock configuration. These validations enabled also to check whether the simplifications of the
mathematical model used are satisfactory.
The center of mass of the motorcycle was obtained using a load cell on each wheel and a signal conditioner (Figure
6a). The methodology used was proposed by Milliken and Milliken (1995, p. 669) to get the height and longitudinal
position of center of mass motorcycle. The motorcycle was leaned over load cells with an angle of 27.3°. This angle
serves the recommendation of Reimpell, Stoll and Betzler (2001, p.390) reducing the calculation error. The inertia
moments used were not measured due to the difficulty in disassembling the motorcycle. The values were obtained from
Cossalter (1999), because, the motorcycle has similar mass and inertia characteristics.
For the motorcycle speed, an inductive sensor from AIM in each motorcycle wheel was used. This sensor captures
the transition metal in the face of the sensor without contact (Figure 6a and b).
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
0 4 8 12 16 20 24 28 32 36 40 44 48
no
rmal
ize
d l
ate
ral
forc
e
camber angle [°]
front tire - 120/70R17
-1,0°
-0,5°
0°
0,5°
1,0°
side slip angle [°]
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 4 8 12 16 20 24 28 32 36 40 44 48
no
rmal
ize
d t
late
ral
forc
e
camber angle[°]
rear tire - 180/50-R17
-1,0°
-0,5°
0°
0,5°
1,0°
side slip angle [°]a b

Figure 6: (a) center of mass, (
The steering angle was measured using a potentiometer installed between the front structure and the steering system
and interconnected with pulleys and belt (Figure 7
AIM feature for calculating the radius of curvature (feature already implemented in the
the module and GPS antenna on the motorcycle fuel tank
and closing the lap was defined. An infrared sensor
transmitter installed on the test track (figure 7
Figure 7: (left) steering angle installed, (
The signal acquisition system chosen was the
motorsport. This system was chosen because it has good performance, expandability; possess all the functions of a
signal conditioner and its own software for analysis and storage of data with graphical interface.
installed in the center of mass of the motorcycle (Figure
equipment to obtain longitudinal and lateral acceleration for further studies. The equipment normally operates at a
temperature zone which was installed as in
Figure 8: AIM installed in motorcycle center of mass.
To measure the motorcycle roll angle was used an articulated arm
ball joints. At the other end of the articulated
caster), ensuring contact between the tire and the ground during the circular path. There is a LVDT (linear variable
displacement transducer) in the arm that provides the location
roll angle of the motorcycle.
Detailed roll angle meter device (Figure 9
1) ø150 mm caster, with self directional system;
2) 2x M8 screw;
3) 20x20 mm steel bar with 2 mm thickness;
4) Linking bracket
5) LVDT, Penny and Giles, MLS 130/150/R/N.
ba
a
D.Rafael, B. Roberto
) center of mass, (b) rear wheel speed sensor, (c) front wheel speed sensor
The steering angle was measured using a potentiometer installed between the front structure and the steering system
(Figure 7a). With an objective to verify the motorcycle trajectory and use the
feature for calculating the radius of curvature (feature already implemented in the AIM) it was necessary to install
antenna on the motorcycle fuel tank (figure 7b). To control all the experiment a point of opening
n infrared sensor was installed on the motorcycle which receives the signal from the
(figure 7c).
) steering angle installed, (center) GPS antenna, (right) lap sensor.
The signal acquisition system chosen was the AIM Evo3 Lane of Italian manufacturing and used in professional
his system was chosen because it has good performance, expandability; possess all the functions of a
signal conditioner and its own software for analysis and storage of data with graphical interface. The AIM module was
e motorcycle (Figure 8) with the goal of using inertial accelerometers built into
equipment to obtain longitudinal and lateral acceleration for further studies. The equipment normally operates at a
in the installation manual.
: AIM installed in motorcycle center of mass.
To measure the motorcycle roll angle was used an articulated arm (figure 9a) fixed to the motorcycle structure with
he other end of the articulated arm there is a tire with directional system of its own (commercially called
caster), ensuring contact between the tire and the ground during the circular path. There is a LVDT (linear variable
displacement transducer) in the arm that provides the location of the bar against the motorcycle, thus determining the
Detailed roll angle meter device (Figure 9b):
ø150 mm caster, with self directional system;
20x20 mm steel bar with 2 mm thickness;
nny and Giles, MLS 130/150/R/N.
c
b c
D.Rafael, B. Roberto
) front wheel speed sensor
The steering angle was measured using a potentiometer installed between the front structure and the steering system
to verify the motorcycle trajectory and use the
) it was necessary to install
. To control all the experiment a point of opening
receives the signal from the
) lap sensor.
of Italian manufacturing and used in professional
his system was chosen because it has good performance, expandability; possess all the functions of a
The AIM module was
) with the goal of using inertial accelerometers built into
equipment to obtain longitudinal and lateral acceleration for further studies. The equipment normally operates at a
fixed to the motorcycle structure with
(commercially called
caster), ensuring contact between the tire and the ground during the circular path. There is a LVDT (linear variable
of the bar against the motorcycle, thus determining the

Motorcycle Cornering Behavior Modeling
Figure 9: (a) motorcycle fully instrumented with roll meter bar, (b) roll meter device detailed.
The system was calibrated with the aid of a digital angle meter fixed to the front frame of the motorcycle,
determining each sign for each roll angle of the motorcycle. The calibration curve is shown in Figure 10:
Figure 10: LVDT Calibration curve.
A table was created with the roll angle values by the input signal in signal conditioner (AIM). This curve was
approximated by a polynomial of third degree, and used the function obtained in the visualization software of acquired
data.
The entire test was performed at FEI University campus. Cones were used for marking the track trajectory. The rider
was instructed not to move the body during the motorcycle rolling, thereby ensuring the initial condition of the model
proposed (rider fixed to motorcycle rear structure). For space limitation reasons, the curvature radius of 20 m were used
and varied the speed until the limit which was necessary to ensure the motorcycle balance.
Figure 11: Test performing at FEI campus.
y = -0,0001x3 - 0,001x2 - 0,3617x + 1,8372
-5
0
5
10
15
20
25
30
35
40
45
-60 -50 -40 -30 -20 -10 0 10
roll
an
gle
[]̊
LVDT signal
Roll device calibration curve
Polynomial
Polinômio (Polynomial)
ba

D.Rafael, B. Roberto
The test was performed on two different days, the first with 14 laps and second with 10 laps. The first day was vital
for the decision to create the acquisition arm for roll angle measurement. It was discovered that the accelerometers and
gyroscopic inside the signal acquisition module were not efficient to manage the values tested (40°). The second day of
testing was characterized by the arm implementation and partial tests to check whether the system was safe for the rider
and whether the arm had sufficient bending stiffness to avoid damage to the LVDT and ensure results accuracy.
RESULTS
Simulation results
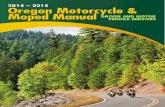
The simulation results are presented in graphs where the x-axis represents the motorcycle roll angle and y-axis
represents the steering angle. The curves in full lines represent speed curves of the motorcycle and the dotted line
represents the radius of curvature. The graph colors represent a simulated variable (effective steering angle, pitch angle,
vertical force on the front and rear tire, lateral force on the front and rear tire, slip angle of the front and rear tire) and
the results are provided by the variation of colors and with the descriptions given by the top bar or side bar of the chart.
As shown in Figure 12, it appears that even for small values of steering angle δ there is the front tire slip represented
by the color gradient and scale at the top of the chart, thus producing lateral force needed to keep the motorcycle in
circular path. With constant motorcycle speed by 40 km/h, there is between point K and L a variation of the radius of
curvature of the motorcycle 20-70 m. In point L, it has a 30° roll angle, 3.4° of steering angle and a side slip angle of
0.7°. Point K, it has a 9° roll angle, 1.2° of steering angle and a slip angle of tire sidewall of 0.25°. It appears that at the
point K, due to the large radius of curvature the motorcycle tire rolling is roughly as cinematic, causing a smaller slip
angle side compared with that determined in point L.
Figure 12: Front tire side slip angle variation.
Experimental results
Initially the accuracy of data collected in the test was confirmed. With the aid of GPS, the circular path of the
motorcycle was found. Two tools were used to do the verification: the first was overlapping the coordinates exporting
the GPS data and importing it into Google Earth (Figure 13a) and checking even the circular path than maneuvers
diameter (40 m).;s
φ ângulo de rolagem[º]
δ â
ngulo
de e
ste
rço[º
]
ângulo de escorregamento lateral do pneu dianteiro [°]
10
20 30
40
50
60
100
80
60
50
40
30
20
5 10 15 20 25 30 35 401
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
0.2 0.4 0.6 0.8 1 1.2
velocidade [km/h]
raio de giro [m]
front tire side slip angle [0]
δsteeringangle[0]
Φ roll angle [0]
speed [km/h]
turning radius [m]
L
K

Motorcycle Cornering Behavior Modeling
Figure 13: (a) Trajectory verification using the GPS output, (b) satellite orientation.
Another tool used was the motorcycle satellite orientation (figure 13b). There are variations between 0 and 180 ̊
linear, confirming the quality of the circular path.
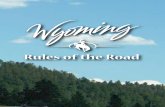
The test results on the 14th
lap are shown at figure 14. The horizontal axis of the graph represents the extension of
the lap (about 130 m). The vertical axes represents from left to right: speed, steering angle and roll angle. The vertical
bar identifies the time when the data was chosen. The red line represents the steering angle in degrees (3.02°), the blue
line represents the motorcycle roll angle (34.36°) and green to the front wheel speed (42.5 km/h).
Figure 14: Experimental test results.
The figures represented above were overlaid with the graphs presented in the result simulation graphs and shown in
Figure 15. First crossed 3° steering angle with 35° of roll angle on the graph in Figure 15. This overlap allows two
important parameters, the speed of the motorcycle and the radius of curvature. Observe that the intersection radius of
curvature is equal to 20 m theoretical and speed 45 km/h. There was a small deviation in the value of speed obtained in
the practical test (42.5 km/h). This deviation was considered acceptable for low speed involved in the test.
Figure 15: Experimental results overlay.
Model modification
A constant need for vehicle designers is to understand the behavior of the vehicle during the design phase, avoiding
undesirable reactions or functions. This prior knowledge is only possible using computer simulations, or prototype
construction, the latter usually very expensive and time consuming.
roll angle [o] 34.25
steering angle [o] 3.6
front wheel speed [km/h] 41.8
φ ângulo de rolagem[º]
δ â
ngulo
de e
ste
rço[º
]
10
20
30
40
50
60
7060
50
40
30
20
∆ â
ngulo
efe
tivo d
e e
ste
rço[º
]
5 10 15 20 25 30 35 401
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
1
2
3
4
5
6
velocidade [km/h]
raio de giro [m]
45 km/h
42.5 km/h
speed [km/h]
turning radius [m]
Φ roll angle [0]
δsteering angle [0]
∆effective steering angle [0]
ba

D.Rafael, B. Roberto
Another major function of the mathematical models is to obtain improvements of the system to certain reactions. In
the specific case of this work was chosen to alter the tires characteristics and check the consequences of this in the
motorcycle directional behavior. This parameter was chosen because, among the possible parameters to change in a
motorcycle the tire is the simplest parameter to be changed (from the manufacturer, for example). The other parameters
(geometric, for example) require changes in the mechanical characteristics of the motorcycle.
The first change was to increase by 10% the camber stiffness coefficient of the front tire, impacting on adherence of
the tire to the ground; the second change was to reduce by 10% the camber stiffness coefficient of the front tire. The
camber stiffness coefficient directly influences the lateral force produced by the tire.
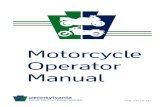
In Figure 16, at point A on a curve with a speed of 40 km/h and curvature radius of 30 m the motorcycle must be
with a steering angle of 2.5° and 22.0° roll angle. Also to do a curve with a speed of 60 km/h and radius of curvature of
40 m (B) requires a steering angle of 1.5° and roll angle of 34.0°. The speed and roll angle will be presented as a
reference for future analysis. The motorcycle is equipped with tires in the "standard" configuration. The difference
between the side slip of the tires provides the directional behavior of the motorcycle. It is also observed that the
motorcycle has under steer behavior in under roll angles below 7° as indicated in the chart (red triangular area on the
bottom left graph) and over steer above this value, characterizing the motorcycle as over steer most use.
Figure 16: Variation of the difference between the front and rear tire side slip (front and rear tire "standard").
In Figure 17, the motorcycle front tire with camber stiffness coefficient increased by 10% and keeping the rear tire
in the configuration standard and using the speed and radius of curvature as previously proposed (40 km/h ; 30 m 60
km/h ; 40 m) the motorcycle meets the condition of equilibrium with a steering angle of 2.3° and roll angle 22° to the
first condition (A) and 1.2° of steering angle with 34° roll angle. Note a reduction in the steering angle required to meet
the speed and maneuvering within the radius of curvature proposed, because the increase of camber stiffness coefficient,
the tire provides greater lateral force compared with the tire in "standard" configuration.
φ ângulo de rolagem[º]
δ â
ngu
lo d
e e
ste
rço[º
]
comportamento direcional λtraseiro - λdianteiro
10 20
30
40
50
60
100 9080 70
60
50
40
30
20
5 10 15 20 25 30 35 401
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
velocidade [km/h]
raio de giro [m]
A
B
speed [km/h]
turning radius [m]
directional behavior λt-λd
δsteeringangle[0]
Φ roll angle [0]
understeer

Motorcycle Cornering Behavior Modeling
Figure 17: Variation of the difference between the front and rear tire side slip (front tire with the camber stiffness
coefficient increased by 10% and rear standard).
In Figure 18, used the velocity and radius of curvature (40 km/h ; 30 m and 60 km/h ; 40 m), but the front tire had a
camber stiffness coefficient reduced by 10% in the front tire and remained the rear tire to the standard configuration, the
motorcycle meets the condition of equilibrium with a steering angle 2.7° and 22° of roll angle for the first hypothesis (A)
and 1.7° angle of steering with 34° roll angle for the second hypothesis (B). In this configuration, the steering angle are
greater in both situations, because the configuration of the tire provides less lateral force than the configuration used in
"standard", requiring a steering angle increase.
Figure 18: Variation of the difference between the front and rear tire side slip (front tire with the camber stiffness
coefficient decreased by 10% and rear standard).
As result of the simulation there is a large zone that the motorcycle have neutral directional behavior (λt-λd = 0),
featuring a motorcycle with directional behavior safer in steady state cornering. This zone can be observed in the area
outlined in red dashed line in Figure 18, this area includes the regime of common use of motorcycles.
CONCLUSION
This work allowed interacting directly with a multibody model of a motorcycle in a steady state curve. This model is
useful in the development phase of a motorcycle anticipating directional characteristics and behaviors reducing
development time and prototype test vehicles, which are usually expensive and require long construction time.
The graphical results allowed a unified view of the simulated variation parameters versus the input parameters
(steering angle and roll angle) and speed of the motorcycle and radius of curvature.
φ ângulo de rolagem[º]
δ â
ngu
lo d
e e
ste
rço[º
]
comportamento direcional λtraseiro - λdianteiro
10
15
20
25
30
35
40
45
50
55
6090
8070
60
50
40
30
20
10
5 10 15 20 25 30 35 401
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
velocidade [km/h]
raio de giro [m]
A
B
speed [km/h]
turning radius [m]
δsteeringangle[0]
Φ roll angle [0]
directional behavior λt-λd
φ ângulo de rolagem[º]
δ â
ng
ulo
de e
ste
rço[º
]
comportamento direcional λtraseiro - λdianteiro
10
20
30
40
50
60
70100 90
8070
60
50
40
30
20
5 10 15 20 25 30 35 401
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
-0.1 0 0.1 0.2 0.3 0.4
velocidade [km/h]
raio de giro [m]
A
B
δsteeringangle[0]
Φ roll angle [0]
directional behavior λt-λd
speed [km/h]
turning radius [m]

D.Rafael, B. Roberto
The mathematical model has consistent appropriate results for the proposed changes, as theory suggested by the
references used in this work.
There was also a need to adapt the automotive dedicated data acquisition equipment to use on motorcycles, because the
high angles of roll (about 40°) present a problem for conventional signal acquisition "hardware" used in automotive
applications, where angles are no bigger than 7°. The construction of a specific device for reading the roll angle of the
motorcycle was of vital importance to the experiment and made the data acquisition system more flexible as to the
applicability. Even the system added to a point of contact between the motorcycle and to the ground due to contact of
rotation on the ground which did not influence the lateral dynamics of the motorcycle and so little on results.
The results of the mathematical model are compatible with the experimental results, for the range of speeds and radii
of curvature.
The study confirmed the different directional motorcycle behavior to vary the camber stiffness coefficient to the
front tire. The directional behavior is an important feature in the development of a motorcycle making it safer and easier
the riding.
ACKNOWLEDGMENTS
To my beloved parents, my wife and Dr. Agenor de Toledo Fleury.

Motorcycle Cornering Behavior Modeling
REFERENCES
Breur, T; Pruckner, A. (1998): “Advanced dynamics motorbike analysis and driver simularion”. In: 13th European
ADAMS User Conference, Paris, 1998.
Berrita, R.; Biral, F.; Garbin,S. (2000): “Evaluation of motorcycle handling and multibody modeling and simulation”.
In: Proceedings of 6th int. conference on high tech engines and cars, Modena, 2000.
Cossalter, V. “Motorcycle Dynamics”, 2008, Second Edition.
Cossalter, V. “Gli pneumatici della motocicletta”: 2008. Disponível em: <http://www.dinamoto.it/DINAMOTO/on-
line%20papers/Pneumatici_file/Pneumatici.htm> Acesso em: 13 out. 2008.
Cossalter, V., Da Lio Mauro, Lot Roberto. “Steady Turning of Two-Wheeled Vehicles”. Vehicle System Dynamics,
EUA, v. 31, n. 2, p. 157-181, fev. 1999.
Iffelsberger, L. (1991): “Application of vehycle dynamics simulation in motorcycle development”. Safety enviroment
future. Forschungsefte Zweiradsicherheit, 7, 1991.
Koenen, C..”Vibrational modes of motorcycle in curves.” In: Proceedings of the int. motorcycle safety conference,
Wash. D.C., Motorcycle safety foundation, Vol. II, 1980.
Meijaard J. P., Papadopoulos J. M., Ruina A. and Schwab4 A. L.: “Linearized dynamics equations for the balance and
steer of a bicycle: a benchmark and review”, 2006.
MILLIKEN, W.F.; MILLIKEN, D.L. Race car vehicle dynamics. SAE International, Warrendale, 1995.
Pacejka, H.B. “Tire and vehicle dynamics”. 2002. Society of Automotive Enfineers, Inc.
REIMPELL, J.; STOLL, H.; BETZLER J. The automotive chassis: Engineering principles. Butterworth Heinemann,
2001.
Sharp, R.S. “Stability, control and steering responses of motorcycles”. Vehicle system dynamics, 35, 4-5, 2001.
Sharp, R.S. “The stability and control of motorcycles”. Journal of mechanical engineering science, 13, 5, I.Mech. E.,
1971.
Wisselman, D.; Iffelsberger, D.; Brandlhuber, B. (1993): “Einsatz eines Fahrdynamik-simulationsmodells in der
motorradentwicklung bei BMW”. ATZ, 95, 2, 1993.
Whipple, F.J.W.The Stability of the motion of a bicycle. Quart. J. of purê and applied mathematics, 30, 1899.
RESPONSIBILITY NOTICE
The author(s) is (are) the only responsible for the printed material included in this paper.