Motor Universal - Transformadores y Maquinas Sincronas - Huayhua , Arivilca , Rosado
21
PROYECTO PARA TRANSFORMADORES Y MAQUINAS SINCRONAS MOTOR UNIVERSAL Alumno(s) : Arivilca Hancco, Jose Antonio Rosado Valdarrago, Braulio Huayhua Llanllaya , Diego Programa : PFR Especialidad: Electrotecnia industrial C-4 Nota: Grupo : D
-
Upload
harrison-lope -
Category
Documents
-
view
13 -
download
2
description
MOTOR UNIVERSAL
Transcript of Motor Universal - Transformadores y Maquinas Sincronas - Huayhua , Arivilca , Rosado

PROYECTO PARA TRANSFORMADORES Y MAQUINAS SINCRONAS
MOTOR UNIVERSAL
Alumno(s) :
Arivilca Hancco, Jose Antonio
Rosado Valdarrago, Braulio
Huayhua Llanllaya , Diego
Programa :
PFR Especialidad: Electrotecnia industrial C-4
Nota:Grupo : D
Semestre : III
Profesora : Phd. Maria Teresa Mendoza
Fecha de entrega : Hora:

INTRUDUCCION:
El motor eléctrico universal basa su funcionamiento en la ley de Laplace. El bobinado inductor y el bobinado inducido están conectados en serie.
Al ser recorridos por una corriente, el bobinado inductor forma el campo magnético y el inducido por la ley de Laplace, al ser recorrido por la corriente y sometido a la influencia delcampo magnético inductor, se desplaza, dando origen al giro del rotor.
Si aumenta el campo aumenta la fuerza, aumenta la velocidad. El campo magnético que produce la bobina inducida, provoca una deformación del flujo inductor llamada reacción del inducido.
En Corriente alterna (CA) o en corriente directa (CD) el sentido se mantiene por la acción momentánea de cada alternancia en particular. En CA produce una f.c.e.m. (fuerza contra electromotriz) por efecto transformador y por efecto generador. En CD sólo por efecto generador.
OBJETIVOS:
Explicar el funcionamiento de un motor universal. Entender y comprender las principales características de un motor universal. Usando la herramienta Matlab desarrollar un motor universal para entender su
funcionamiento.
MARCO TEÓRICO:
El motor universal, es un motor capaz de trabajar tanto en corriente continua DC como en corriente alterna AC, su aplicación principal es para herramientas portátiles debido a su bajo coste, su reducido tamaño, su poco peso y que pueden trabajar en corriente alterna (AC 50 Hz), las ventajas de este motor son grandes pares de arranque y elevadas velocidades de rotación cuando se alimentan con excitación en serie (características semejantes al motor de continua con excitación en serie), sus desventajas es q necesitan mantenimiento (cambio de escobillas) aunque en aplicaciones domesticas no se suele llevar a cabo este mantenimiento, se dimensionan las escobillas hasta el fin de la vida del electrodoméstico.
EL FUNCIONAMIENTO
Del motor universal es parecido al del motor de continua, en el que el colector de delgas al
girar producía un cambio de polaridad en el rotor con el que continuamente
se producía una repulsión de los polos del rotor y el estator. En un motor universal cuando lo
alimentamos de la red, tenemos que el estator esta alimentado con una corriente alterna AC, para
que se produzca la repulsión de los polos del rotor y estator, los polos del rotor han de estar
alimentados de forma adecuada en función de la alimentación de los polos del estator y esto se
consigue con el colector de delgas de forma similar al motor de corriente continua alimentando las
bobinas del rotor que están ligeramente giradas respecto de las del estator con la misma corriente
que las bobinas del estator produciéndose una repulsión máxima en función del número de
bobinas o pares de polos del rotor.

COMPONENTES
En este motor sus partes son las mismas que las de un motor de continua con excitación en serie.
El motor universal tiene sus mismas características: colector de delgas, escobillas, devanados en
el estator y rotor también devanado. Y solo posee dos bornes mediante los cuales se alimentan
inductor e inducido en serie.
La respuesta de este motor en corriente continua es igual que un motor de corriente continua con
excitación en serie y la respuesta en corriente alterna es similar al motor de corriente continua con
excitación en serie ya que al invertirse el sentido de la corriente en el inductor (debido a la corriente
alterna), en el inducido también se produce un cambio de sentido, así que el giro del motor siempre
es en la misma dirección. Las características de funcionamiento en alterna dan peores
prestaciones que en continua debido a las variaciones de la tensión de alimentación (corriente
alterna) ya que las bobinas están alimentadas con corriente continua pulsante, igual que con un
puente rectificador que en este caso es el colector de delgas.
PRECAUCIONES
En este motor, igual que en los motores de corriente continua con excitación en serie, hay que
tener la precaución de no alimentarlos sin carga ya que al funcionar en vacío, el motor puede
acelerarse hasta unas velocidades que produzcan unas intensidades de corriente en las bobinas
que quemen los aislantes y el motor. En aplicaciones domesticas los bobinados
ya están preparados para el funcionamiento en vacío y no existe este peligro. Cambien realizar el
correcto mantenimiento de las escobillas.

APLICACIÓN EN AEROGENERACIÓN
Y en cualquier otra aplicación de la que queramos aprovechar un movimiento circular o no para
generar electricidad.
En Aero generación, como hemos indicado en páginas superiores, es necesario girar un rotor
alimentado a cierta tensión y obtener del estator una energía eléctrica, pues bien, en el caso de
motores universales domésticos reciclados para este fin tenemos la peculiaridad que estos
motores están en configuración serie, es decir, toda la corriente que pasa por el rotor también pasa
por el estator y nosotros queremos dos circuitos independientes, así que.... tenemos
que separarlos. Generalmente no es complicado solo es necesario un poco de maña y un soldador
de estaño ya que los bornes de las bobinas del estator están unidos cerca de las escobillas o en el
mismo elemento (recordar que las escobillas son los bornes de las bobinas del rotor).
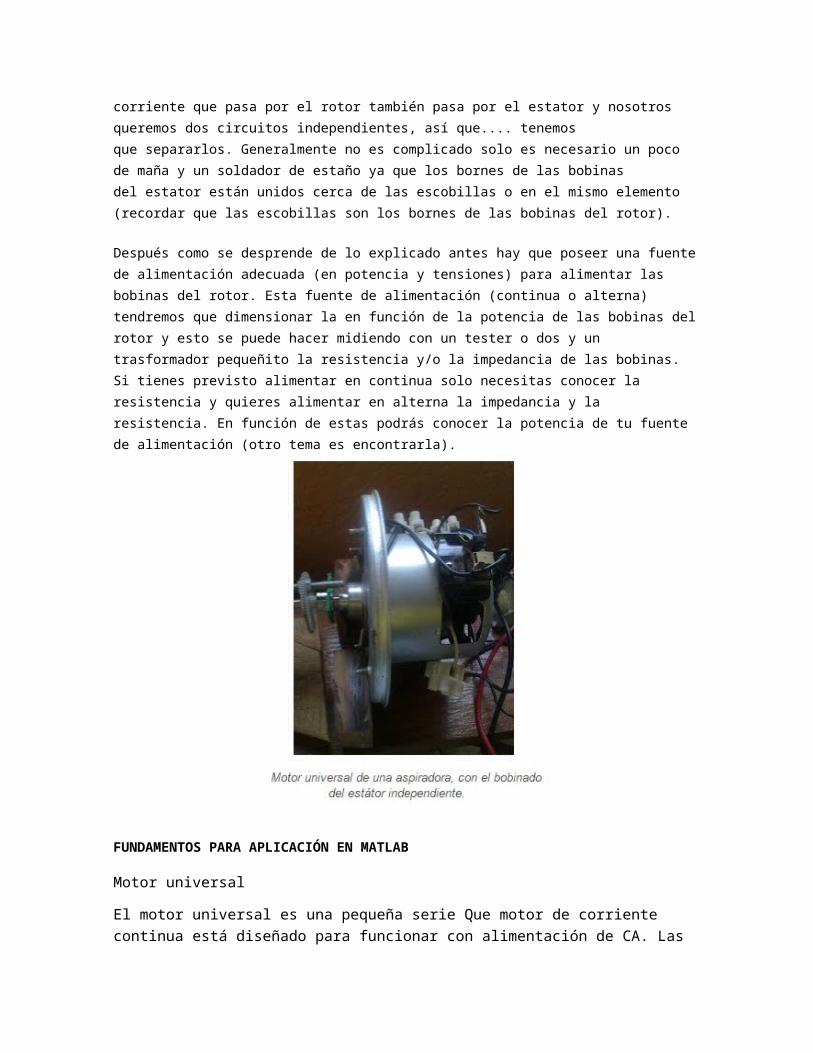
Después como se desprende de lo explicado antes hay que poseer una fuente
de alimentación adecuada (en potencia y tensiones) para alimentar las bobinas del rotor. Esta
fuente de alimentación (continua o alterna) tendremos que dimensionar la en función de la potencia
de las bobinas del rotor y esto se puede hacer midiendo con un tester o dos y un trasformador
pequeñito la resistencia y/o la impedancia de las bobinas. Si tienes previsto alimentar en continua
solo necesitas conocer la resistencia y quieres alimentar en alterna la impedancia y la resistencia.
En función de estas podrás conocer la potencia de tu fuente de alimentación (otro tema
es encontrarla).
FUNDAMENTOS PARA APLICACIÓN EN MATLAB
Motor universal
El motor universal es una pequeña serie Que motor de corriente continua está diseñado para funcionar con alimentación de CA. Las características de los motores universales son de alta velocidad sin carga y alto par de arranque. Debido a la alta velocidad de funcionamiento, el tamaño de estos motores para un determinado beheerder calificación CV es típicamente menor que otras máquinas CV ac fraccionarias, lo que es ideal para disfrutar de herramientas a mano de ayuda y electrodomésticos donde el peso, tamaño compacto y la velocidad son factores importantes.
Si la corriente de armadura total de I a , I s, Imcoswtes, la corriente en las bobinas de una armadura con a se dará caminos paralelos idénticos beheerder por.
I c=1aImcoswt A
En la máquina de serie salido, el flujo producido por la corriente alterna,I a, también será la alternancia en el tiempo. Por lo tanto, el flujo por polo puede ser expresado.
∑i=t
n x
B (θ , t ) LT=φmcoswt wb
Sustituyendo estos ene (eq.8.16.), obtenemos información
T em=PZ2πa
φm Imcos2wt N .m
El valor medio de la anterior es torque
T em=PZ2πa
φm Im2
N .m
Es sólo la mitad de Que el caso en que el flujo y la corriente están en un nivel constante deφm y Im, respectivamente.
La figura muestra la simulación Simulink, (s4) del motor universal. El MATLAB m-vida correspondiente, (m4), se puede utilizar para configurar el espacio de trabajo de MATLAB para simular el motor que tiene los siguientes parámetros y la curva de magnetización:
Potencia nominal es de 325W Tensión nominal en los terminales es de 120 V rms
Velocidad nominal es 2800 rpm Inductancia del devanado del inducido,Leq = 10 mH Devanado de campo serie inductancia,Lse = 26 mH Frecuencia de alimentación nominal voltaje es de 60 Hz Armadura corriente nominal es de 3,5 Arms
Armadura resistencia del devanado, Ra = 0,6 Ω

Devanado de campo serie resistencia, Rse = 0,1 Ω Rotor de inercia, es decir m2 = 0.015 kg
Característico de la magnetización de la máquina a una velocidad constante de 1500 rpm se muestra en fig. In la simulación, el interruptor, sw4ac, controla Ya sea a favor o suministro de voltaje de corriente alterna se alimenta al circuito de la armadura. El generador de función de paso de retardo Permite la sincronización del cambio de paso en par de carga y los dos niveles de T T mechutilizados aquí.
Vamos a examinar primero los transitorios de arranque de la serie del motor con una tensión terminal V a de 120√2 senwt V y el par de carga igual al valor nominal de 1,1084 Nm. Obtener parcelas de la corriente de armadura I a, voltaje interno Ea , desarrollado Tem torque y velocidad del rotor, Wm, para la puesta en marcha. tomar un complot escala de tiempo ampliada de las mismas variables Cuando la máquina ha alcanzado -estado constante. Realizar un cambio en el par de carga a partir de pleno nominal a medio-clasificado y obation las parcelas de Ea,V a , I a , T em y W nde la respuesta de la máquina para el cambio de paso en par de carga. En cuenta la diferencia de fase entre V a yI a, y la frecuencia de la componente pulsante en T em • Explicar la diference en magnitud entre V a y Ea, aparte de la resistencia cae a través de Ra y R se.
Reemplazar la fuente de corriente alterna para V a con una fuente de corriente continua del mismo valor eficaz, que es el V a de tensión de alimentación de 120 V dc utilizando el, repita el plazo de inicio con par nominal de carga y el cambio de ritmo en par de carga de clasificar a medio - evaluado .obtain parcelas de V a, I a,Ea , T emy W n de la puesta en marcha y la respuesta transitoria al cambio de carga paso. Comentarios sobre la diferencia en magnitud de I ay en la velocidad de arranque y respuesta a la cahnge pasó en par de carga del motor con los dos tipos de alimentación de tensión.
Resultados de la muestra de la puesta en marcha con alimentación de corriente alterna se muestran en la Figura .8.39. , Y los de la respuesta de la máquina a una reducción paso en par de carga en t = 0,5 s con CA y CC suministros se muestran en la fig.
DESARROLLO DE LA SIMULACIÓN DE LOS DATOS OBTENIDOS EN EL MOTOR DC CON EL USO PROGRAMA MATLAB
(m4.m)
% M-file m4.m es para Proyecto 4 en el motor universal en el Capítulo 8.%% m4.m carga los siguientes parámetros de la máquina de la máquina de corriente continua% y parcelas de los resultados de la simulación% Prated = 325; Frated = 60; wrated = 2*pi*Frated;

Vrated = 120; % rms voltajeIarated = 3.5 % rms ampwmrated = 2800*(2*pi)/60; Trated = Prated/wmrated;Ra = 0.6;Rse = 0.1;Laq = 0.010; Lse = 0.026;J = 0.015; % la inercia del rotor en kgm2 %Entrando datos de la curva de magnetización: wmo = 1500*(2*pi)/60; % velocidad a la que mag. datos de la curva fue tomada% valores de la tensión de carga de mag. curvaSEVP4 = [-160 -155 -150 -145 -140 -135 -130 -125 -120 ... -115 -110 -105 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 ...10 20 30 40 50 60 70 80 90 100 105 110 115 120 125 130 135 ...140 145 150 155 160]; % cargar principales valores de corriente de campo de mag. curva SEIP4 = [-14.225 -12.275 -10.725 -9.725 -9.100 -8.600 ...-8.075 -7.650 -7.200 -6.850 -6.492 -6.135 -5.775 -5.112 -4.500 ...-3.825 -3.275 -2.783 -2.250 -1.688 -1.125 -0.542 0.0 0.542 1.125 ... 1.688 2.250 2.783 3.275 3.825 4.500 5.112 5.775 6.135 ... 6.492 6.850 7.200 7.650 8.075 8.600 9.100 9.725 10.725 ...12.275 14.225 ]; clf; % figura claraplot(SEIP4,SEVP4); % curva mag parcela mide a la OMMaxis('square') % Inicialice condición de ejecuciónSw4AC = 1 % coloque el interruptor de utilizar el suministro de corriente alternawm0 = 0 % ajustar la velocidad inicial a cero para comenzar desde parado % Traslado al teclado para la simulación de iniciodisp('Simulación establecido para la corrida de inicio, lleve a cabo la simulación')disp(' a continuación, introduzca '' regreso '' para las parcelas');keyboard clf; % figura clarasubplot(4,1,1)plot(y(:,1),y(:,2))title('Tensión de alimentación AC')ylabel('Va en V')subplot(4,1,2)plot(y(:,1),y(:,3))title('tensión interna')ylabel('Ea en V')subplot(4,1,3)plot(y(:,1),y(:,4))title('corriente de armadura')ylabel('Ia en A')subplot(4,1,4)

plot(y(:,1),y(:,5))title('Torque')ylabel('Tem en Nm')xlabel('tiempo in sec')disp('Guardar parcelas antes de entrar retorno a continuar con carreras de carga');keyboard % Inicialice condición de ejecuciónSw4AC = 1 % coloque el interruptor de utilizar el suministro de corriente alternawm0 = 275; % establecer el valor inicial ss velocidad cerca de escalonamiento de carga% Traslado al teclado para la ejecución de par pasodisp('La configuración de ac alimentado, carrera de par paso, realizar la simulación')disp(' a continuación, introduzca '' regreso '' para el caso de corriente continua alimentado');keyboardclf; subplot(4,1,1)plot(y(:,1),y(:,4))title('Corriente de armadura con el suministro de corriente alterna')ylabel('Ia en A')subplot(4,1,2)plot(y(:,1),y(:,5))title('Par con el suministro de corriente alterna')ylabel('Tem en Nm') % Inicialice condición de ejecuciónSw4AC = 0 % coloque el interruptor de utilizar el suministro de corriente alterna wm0 = 350; % establecer el valor inicial ss velocidad cerca de escalonamiento de cargadisp('Configuración para alimentados cc, plazo par paso, realizar la simulación')disp(' a continuación, introduzca '' regreso '' para las parcelas de ambas carreras de par de pasos');keyboardsubplot(4,1,3)plot(y(:,1),y(:,4))title('Corriente de armadura con el suministro de corriente continua')ylabel('Ia en A')subplot(4,1,4)plot(y(:,1),y(:,5))title('Torque con alimentación de corriente continua')ylabel('Tem en Nm')xlabel('tiempo en sec');
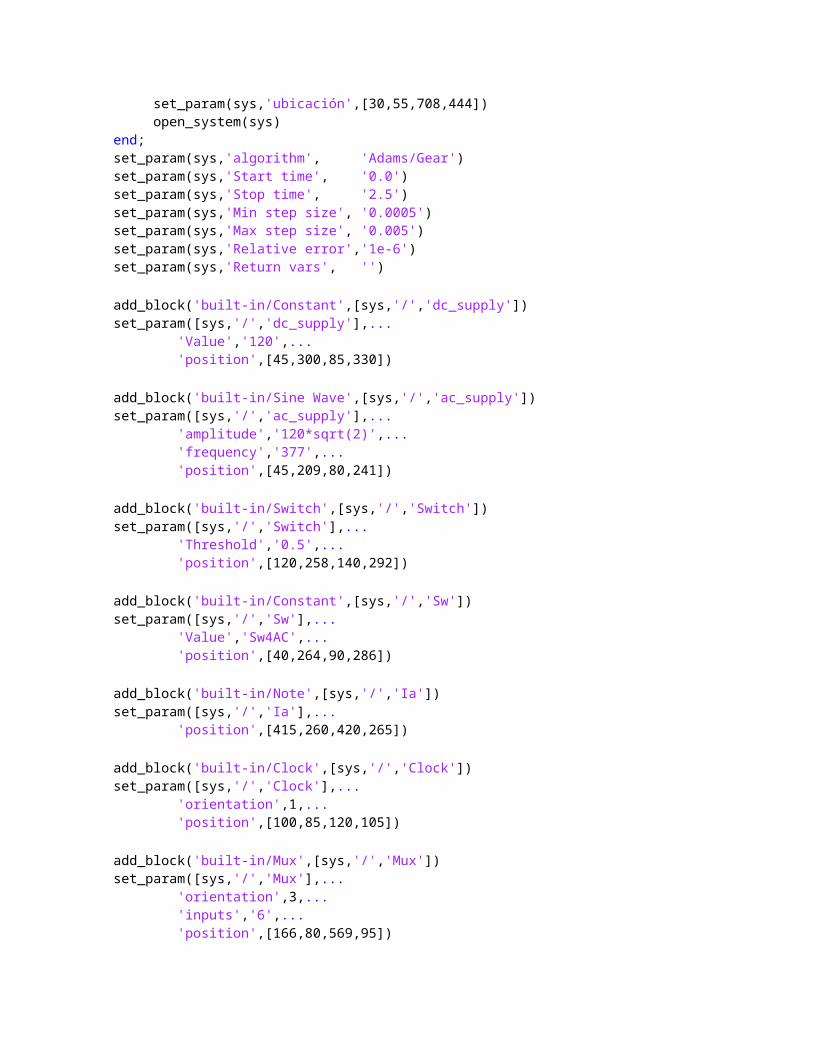
(s4.m)
function [ret,x0,str,ts,xts]=s4(t,x,u,flag);

%s4 es la descripción M-file del sistema SIMULINK llamado s4.% S4 tiene una de las siguientes características:% 2 estados continuos% estados discretos% salidas% 0 entradas% No tiene feedthrough directa% 1 tiempos de muestreo%% El diagrama de bloques se puede mostrar escribiendo: s4.%% SYS = s4 (T, X, U, FLAG) devuelve dependiendo BANDERA cierta% Los valores del sistema dadas punto de tiempo, T, vector de estado actual, X,% Y vector de entrada, U.% BANDERA se utiliza para indicar el tipo de salida que ser devueltos en SYS.%% Ajuste BANDERA = 1 causas s4 para volver derivados estatales, BANDERA = 2% discretas estados, bandera = 3 salidas del sistema y FLAG = 4 muestra siguiente% De tiempo. Para obtener más información y otras opciones ver SFUNC.%% Llamadas s4 con una bandera de cero:% [TAMAÑO] = s4 ([], [], [], 0), devuelve un vector, tamaños, que% Contiene los tamaños del vector de estado y otros parámetros.% TAMAÑOS (1) número de estados% TAMAÑOS (2) número de estados discretos% TAMAÑOS (3) número de salidas% TAMAÑOS (4) número de entradas% TAMAÑOS (5) número de raíces (actualmente sin soporte)% TAMAÑOS% (6) de la bandera directa feedthrough% TAMAÑOS (7) Número de veces que la muestra%% Para la definición de otros parámetros en tamaños, ver SFUNC.% Consulte también, TRIM, LINMOD, LINSIM, EULER, RK23, RK45, ADAMS, GEAR. % Nota: Este archivo-M sólo se utiliza para guardar información gráfica;% Después de que el modelo se carga en memoria un modelo interno% Se utiliza la representación. % El sistema tomará el nombre de este MFILE:sys = mfilename;new_system(sys)simver(1.3)if (0 == (nargin + nargout)) set_param(sys,'ubicación',[30,55,708,444]) open_system(sys)end;set_param(sys,'algorithm', 'Adams/Gear')set_param(sys,'Start time', '0.0')set_param(sys,'Stop time', '2.5')set_param(sys,'Min step size', '0.0005')set_param(sys,'Max step size', '0.005')set_param(sys,'Relative error','1e-6')set_param(sys,'Return vars', '')

add_block('built-in/Constant',[sys,'/','dc_supply'])set_param([sys,'/','dc_supply'],... 'Value','120',... 'position',[45,300,85,330]) add_block('built-in/Sine Wave',[sys,'/','ac_supply'])set_param([sys,'/','ac_supply'],... 'amplitude','120*sqrt(2)',... 'frequency','377',... 'position',[45,209,80,241]) add_block('built-in/Switch',[sys,'/','Switch'])set_param([sys,'/','Switch'],... 'Threshold','0.5',... 'position',[120,258,140,292]) add_block('built-in/Constant',[sys,'/','Sw'])set_param([sys,'/','Sw'],... 'Value','Sw4AC',... 'position',[40,264,90,286]) add_block('built-in/Note',[sys,'/','Ia'])set_param([sys,'/','Ia'],... 'position',[415,260,420,265]) add_block('built-in/Clock',[sys,'/','Clock'])set_param([sys,'/','Clock'],... 'orientation',1,... 'position',[100,85,120,105]) add_block('built-in/Mux',[sys,'/','Mux'])set_param([sys,'/','Mux'],... 'orientation',3,... 'inputs','6',... 'position',[166,80,569,95]) add_block('built-in/Note',[sys,'/','kaphi'])set_param([sys,'/','kaphi'],... 'position',[205,195,210,200]) add_block('built-in/Note',[sys,'/','Ea'])set_param([sys,'/','Ea'],... 'position',[170,141,175,146]) % Subsistema 'Ea_'. new_system([sys,'/','Ea_'])set_param([sys,'/','Ea_'],'Location',[33,479,253,634]) add_block('built-in/Product',[sys,'/','Ea_/Product'])set_param([sys,'/','Ea_/Product'],... 'position',[65,55,90,75]) add_block('built-in/Sum',[sys,'/','Ea_/Sum'])set_param([sys,'/','Ea_/Sum'],...

'inputs','+',... 'position',[125,55,145,75]) add_block('built-in/Outport',[sys,'/','Ea_/out_1'])set_param([sys,'/','Ea_/out_1'],... 'position',[185,55,205,75]) add_block('built-in/Inport',[sys,'/','Ea_/in_2'])set_param([sys,'/','Ea_/in_2'],... 'Port','2',... 'position',[15,90,35,110]) add_block('built-in/Inport',[sys,'/','Ea_/in_1'])set_param([sys,'/','Ea_/in_1'],... 'position',[15,25,35,45])add_line([sys,'/','Ea_'],[40,100;60,70])add_line([sys,'/','Ea_'],[40,35;60,60])add_line([sys,'/','Ea_'],[95,65;120,65])add_line([sys,'/','Ea_'],[150,65;180,65])set_param([sys,'/','Ea_'],... 'Mask Display','.\n',... 'Mask Type','Dot Product',... 'Mask Dialogue','Inner (dot) product.\ny=sum(u1.*u2)')set_param([sys,'/','Ea_'],... 'Mask Help','Computes the inner (dot) product of the inputs: sum(u1.*u2). The inputs are vectors of the same length. Output is a scalar.') % Terminado bloque compuesto 'Ea_'. set_param([sys,'/','Ea_'],... 'orientation',2,... 'position',[195,140,215,175]) add_block('built-in/Gain',[sys,'/','1//wmo'])set_param([sys,'/','1//wmo'],... 'orientation',2,... 'Gain','1/wmo',... 'position',[240,180,290,220]) add_block('built-in/Look Up Table',[sys,'/','Mag_curve'])set_param([sys,'/','Mag_curve'],... 'orientation',2,... 'Input_Values','SEIP4',... 'Output_Values','SEVP4',... 'position',[305,175,370,225]) add_block('built-in/Gain',[sys,'/','Ra+Rse'])set_param([sys,'/','Ra+Rse'],... 'orientation',2,... 'Gain','Ra+Rse',... 'position',[265,327,355,363]) add_block('built-in/Gain',[sys,'/','1//(Laq+Lse)'])set_param([sys,'/','1//(Laq+Lse)'],... 'Gain','1/(Laq+Lse)',...
'position',[225,250,325,300]) add_block('built-in/Sum',[sys,'/','Sum'])set_param([sys,'/','Sum'],... 'inputs','-+-',... 'position',[185,239,205,311]) add_block('built-in/Integrator',[sys,'/','Integrator'])set_param([sys,'/','Integrator'],... 'position',[345,259,380,291]) add_block('built-in/Integrator',[sys,'/','Integrator2'])set_param([sys,'/','Integrator2'],... 'Initial','wm0',... 'position',[595,174,625,206]) add_block('built-in/Gain',[sys,'/','1//J'])set_param([sys,'/','1//J'],... 'Gain','1/J',... 'position',[530,169,575,211]) add_block('built-in/Sum',[sys,'/','Sum2'])set_param([sys,'/','Sum2'],... 'position',[490,162,505,213]) add_block('built-in/Note',[sys,'/','Tem'])set_param([sys,'/','Tem'],... 'position',[460,155,465,160]) % Subsistema de "productos".new_system([sys,'/','Product'])set_param([sys,'/','Product'],'Location',[33,479,253,634]) add_block('built-in/Product',[sys,'/','Product/Product'])set_param([sys,'/','Product/Product'],... 'position',[65,55,90,75]) add_block('built-in/Sum',[sys,'/','Product/Sum'])set_param([sys,'/','Product/Sum'],... 'inputs','+',... 'position',[125,55,145,75]) add_block('built-in/Outport',[sys,'/','Product/out_1'])set_param([sys,'/','Product/out_1'],... 'position',[185,55,205,75]) add_block('built-in/Inport',[sys,'/','Product/in_2'])set_param([sys,'/','Product/in_2'],... 'Port','2',... 'position',[15,90,35,110]) add_block('built-in/Inport',[sys,'/','Product/in_1'])set_param([sys,'/','Product/in_1'],... 'position',[15,25,35,45])add_line([sys,'/','Product'],[40,100;60,70])add_line([sys,'/','Product'],[40,35;60,60])

add_line([sys,'/','Product'],[95,65;120,65])add_line([sys,'/','Product'],[150,65;180,65])set_param([sys,'/','Product'],... 'Mask Display','.\n',... 'Mask Type','Dot Product',... 'Mask Dialogue','Inner (dot) product.\ny=sum(u1.*u2)')set_param([sys,'/','Product'],... 'Mask Help','Computes the inner (dot) product of the inputs: sum(u1.*u2). The inputs are vectors of the same length. Output is a scalar.') % Terminado compuesta bloque 'producto'. set_param([sys,'/','Product'],... 'position',[430,154,445,196]) add_block('built-in/Note',[sys,'/','wm'])set_param([sys,'/','wm'],... 'position',[645,185,650,190]) add_block('built-in/To Workspace',[sys,'/','To Workspace'])set_param([sys,'/','To Workspace'],... 'mat-name','y',... 'buffer','12000',... 'position',[430,36,500,54]) add_block('built-in/Scope',[sys,'/','Scope'])set_param([sys,'/','Scope'],... 'orientation',2,... 'Vgain','150.000000',... 'Hgain','2.000000',... 'Vmax','300.000000',... 'Hmax','4.000000',... 'Window',[42,440,723,654])open_system([sys,'/','Scope'])set_param([sys,'/','Scope'],... 'position',[245,35,265,55]) add_block('built-in/Step Fcn',[sys,'/','Tmech'])set_param([sys,'/','Tmech'],... 'orientation',2,... 'Time','0.5',... 'Before','-1',... 'After','-0.5',... 'position',[490,233,540,257]) % Subsistema «m4». new_system([sys,'/','m4'])set_param([sys,'/','m4'],'Location',[450,4260301,601,4260399]) add_block('built-in/Note',[sys,'/',['m4/Masked block of m4.m to initialize',13,'s4.m in Chapter 8 and to plot results']])set_param([sys,'/',['m4/Masked block of m4.m to initialize',13,'s4.m in Chapter 8 and to plot results']],...

'position',[75,60,80,65])set_param([sys,'/','m4'],... 'Mask Display','Initialize\nand plot',... 'Mask Type','Masked block of m4.m',... 'Mask Dialogue','eval(''m4'')',... 'Mask Help','Uses m4.m to initialize and plot') % Terminado bloque compuesto 'm4'. set_param([sys,'/','m4'],... 'Drop Shadow',4,... 'position',[464,292,545,334])add_line(sys,[210,275;220,275])add_line(sys,[510,190;525,190])add_line(sys,[580,190;590,190])add_line(sys,[630,190;635,190;635,150;220,150])add_line(sys,[190,160;160,160;160,250;180,250])add_line(sys,[330,275;340,275])add_line(sys,[385,275;400,275;400,345;360,345])add_line(sys,[370,75;370,45;425,45])add_line(sys,[370,75;370,45;270,45])add_line(sys,[110,110;205,100])add_line(sys,[300,200;295,200])add_line(sys,[235,200;235,165;425,165])add_line(sys,[235,200;235,165;220,165])add_line(sys,[385,275;400,275;400,185;425,185])add_line(sys,[260,345;170,345;180,300])add_line(sys,[450,175;485,175])add_line(sys,[630,190;635,190;635,150;530,150;530,100])add_line(sys,[450,175;465,175;465,100])add_line(sys,[385,275;400,275;400,100])add_line(sys,[190,160;190,130;335,130;335,100])add_line(sys,[385,275;400,275;400,200;375,200])add_line(sys,[145,275;180,275])add_line(sys,[85,225;95,225;95,265;115,265])add_line(sys,[95,275;115,275])add_line(sys,[90,315;105,315;115,285])add_line(sys,[485,245;465,245;465,200;485,200])add_line(sys,[145,275;145,120;270,120;270,100]) drawnow % Regreso ningún argumento.if (nargin | nargout) % Debe utilizar feval aquí para acceder al sistema en la memoria if (nargin > 3) if (flag == 0) eval(['[ret,x0,str,ts,xts]=',sys,'(t,x,u,flag);']) else eval(['ret =', sys,'(t,x,u,flag);']) end else [ret,x0,str,ts,xts] = feval(sys); endelse

drawnow % Flash hasta el modelo y ejecutar de devolución de llamada de cargaend
CURVA RESULTANTE DE SIMULACIÓN
Fig3. Curva de magnetización con el campo de la serie a 1500 rpm
USANDO LA HERRAMIENTA SIMULINK DE MATLAB, SE PUEDE OBTENER.

Fig4. Plano de simulink para el motor ensayado
Fig5. Curvas obtenidas en simulink

CONCLUSIONES:
Se logro ver el funcionamiento de una maquina universal grasias a los fundamentos teóricos estudiados.
Se identificaron las deficiencias y pros de esta maquinas , al compararla con otras maquinas eléctricas.
Se uso de manera efectiva el programa MATRIX LABORATORY (MATLAB) , para elaborar las pruebas y funcionamiento del motor evaluado.
Se uso l herramienta simulink de el programa MATLAB para identificar curvas en el motor evaluado.
Se desarrollo con empreño y cooperación el proyecto , contando con apoyo del grupo completo.
La maquinas motor universal es mayormente usada en electrodomésticos caseros , debido a su alto torque de arranque y su alta velocidad sin carga.
El motor universal puede ser alimentado por ambos tipos de corriente , tanto DC como AC , asiéndola muy eficiente y versátil.
Bibliografía
Che-mun ong – Dynamic Simulations of electric Machinery – using MATLAB SIMULINK


















