Motivation and Design Issues
24
1 Motivation and Design Issues • Interest in exhibiting advantage of CMOS based digital control • Very low standby power feasible in PFM (low power) mode • Dramatic power saving in PWM mode due to internal power management
description
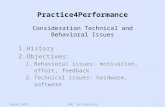
Motivation and Design Issues. Interest in exhibiting advantage of CMOS based digital control Very low standby power feasible in PFM (low power) mode Dramatic power saving in PWM mode due to internal power management. SVDD. PVIN. comparator. digital controller. SW. PFM control. clk. Dc. - PowerPoint PPT Presentation
Transcript of Motivation and Design Issues

1
Motivation and Design Issues
• Interest in exhibiting advantage of CMOS based digital control
• Very low standby power feasible in PFM (low power) mode
• Dramatic power saving in PWM mode due to internal power management

2
System Block Diagram
•Two modes: PWM and PFM
REF
FB
SWPFMcontrol
PWMcontrol
digitaldither ring
osc.
MUX
soft start counter
ring ADC
clk
De
Dc
comparator
PVIN
PGND
MODEENSGND
SVDD
digital controller
clk

3
Berkeley Switcher Specifications
Symbol
Parameter Min Typ Max Units
fsw Switching Freq 500 1500 kHz
Io,max Max Output Current 500 mA
VIN Input Voltage 2.8 5.5 V
Ilim Switch Peak Current Limit 1000 mA
ΔVADC PWM Mode ADC Quantization Bin 16 mV
ton PFM Fixed On-time 1.3 μs
NDPWM PWM Resolution 5 + 5 Bit
NDITH PWM Digital Dither Resolution 5 Bit
Tsoft-start Soft start duration 1100 μs
IPFMQuiescent current in PFM mode 3 μA

4
Power Train
Problem: high input voltage vs low voltage process
Solutions: 1. Cascoded stucture2. Lateral drain extension structure

5
Power Train: Cascoded Structure
Drain
VBias
VIN
Source
VOX
Gate oxide breakdown voltage ~5V
Drain
Source
VOX
VIN
Working voltage ~ 2.5V

6
Power Train: LDD Structure
n well
com
pos
ite
gat
e
n well
com
pos
ite
gat
e
com
pos
ite
gat
e
com
pos
ite
gat
e p-LDD layout
n-LDD layout
0
0.3
0.6
0.9
1.2
1.5
1.8
0 2 4 6 8 10
Vgs=1.4V Vgs=2.5V
n-LDD (Ω) 0.27 0.22
p-LDD (Ω) 1.03 0.51
Rdson:
0
0.4
0.8
1.2
1.6
0 2 4 6 8 10
Measured break down voltage
I D (
mA
)
I D (
mA
)
VDS (V) VDS (V)
n-LDD: 7.5~8V p-LDD: 6.5~7.2V

7
Cascoded Structure Test Results
20000
0.24
10000
0.24
PVIN
PVIN/2
GND
SW
Vgs=1.4V Vgs=2.5V
NMOS (Ω) 0.33 0.25
PMOS (Ω) 0.60 0.35
Rdson:
NMOS break down voltage: 7.7V
VDS (V)
I D (
uA
)
Rdson:
0
50
100
150
200
250
0 2 4 6 8 100
20
40
60
80
100
120
7.4 7.5 7.6 7.7 7.8 7.9 8 8.1
PMOS break down voltage: 7.9V

8
Internal Power Management
20000
0.24
10000
0.24
NFET signal
PVIN
PVIN/2
GND
PFET signal
SW
Digital controller
Voltage regulator
Scavenges power from gate drive discharge
Offers safe supply voltage for controller circuitry
80A
40A
40A PWM

9
Internal Voltage Regulations
• Total current consumptions: 1A
• BW of each amplifier: 40kHz
PVIN
PGND
VCext
PVIN
PGND
V/2
V/2 Cext

10
Control Law
• PFM Mode (low power, low quiescent curr.)• Fixed on-time control avoids ripple jitter due to
discrete sampling of comparators at rising Vout in hyst
ctrl
• ton = 0.8 Tsw = 1.33 s Vripp,max = 90 mV @ Vin = 5.5 V,
Iout = 0.1 mA
• At high output loads, still jitter due to sampling
• PWM Mode• PID control with digital dither
• Saturated controller response (for large transients)

11
PFM (Fixed On-time) Mode

12
ADC and DPWM Resolution
VADC = 16 mV = 0.8% reg @ Vout = 1V
VDPWM = 5.4 mV @ Vin = 5.5 V• 5 bit ring osc + 5 bit digital dither • no limit cycling in steady state
• Sampled at fsw

13
PWM Mode: DPWM Module
PWM off
VDD
VSS
5-bit Differential Ring
5-bit MUX
5
VDD
1 pair of differential signals
VDDL
Isupply
Ring-MUX Structure
Level Shifter
Dc

14
Protection Mode Soft Start
• Build into digital control loop
• Disable PD control
• Make error signal slew the digital integrator
to the appropriate level corresponding to
Vout = Vref
• Gain of error signal set to effect desired
duration of soft-start sequence, tsoft-start =
1100 s

15
Digital processing core
PD
Int
Comb
Logic
Dither
Fully on
Fully off
Dc_calcDe Dc
Clamp
From ringAD
C en
en
Pin: EN Soft start
counter
en Soft_start
Go to DPWM

16
Ring ADC Basics
Frequency of ring oscillator has linear relation with Itot when voltage swing is below threshold:
VDD
Itot
4-stage differential ring oscillator running at sub-threshold current
bImf tot
Simulated oscillator frequency versus supply current
3.0E+06
4.0E+06
5.0E+06
6.0E+06
7.0E+06
4.E-07 5.E-07 6.E-07 7.E-07 8.E-07 9.E-07
r2=0.99991m=6.83e12b=378034
Supply Current (A)
Frequency
(H
z)

17
Ring ADC Architecture
0
0
( )st T
e o reftD V V dt
Sampling freq=500kHz, LSB=16mV, approx 100mV window, VDD=1.5V
Measured current: 36.72A, area = 0.15 mm2
De’
LevelShifter
LevelShifter
CounterN
Counter1
LevelShifter
Counter1
LevelShifter
CounterN
N
N
Σ
Σ
VDD
VSS
Vo Vref
D1
D2
Analog Block
Digital Block

18
PFM Mode: Comparator Details
CK
CK
CK
CK
CK
Vin
Vip
Vop
Von

19
PFM Mode Quiescent Current
Simulation: 600kHz sampling frequency Comparator, ring osc., level shifters(from
ring voltage to internal VDD), and clock generation: 3μA (from PVIN/2)
Internal voltage regulators: 1.0μA(from PVIN)

20
Berkeley Switcher Layout
Ring ADC
DPWM &
Clk Gen
Digi
Core
PFM ModeComparator
Power Train
Gate Drives
PFET
NFET500μm
2.6mm
1.7
mm

21
Comparison between Analog and Digital Controllers
For mobile phone application:
Controller Total Quiescent Current
PFM Mode PWM Mode (not include power train)
LM2612 150A 550A
Berkeley Switcher (Simulated)
3 A

22
Berkeley Switcher Pin Description
Pin Number
Pin Name Function
1 FB ADC input. Connect directly to Vout
2 REF Analog voltage reference Vref
3 MP Internal Voltage Level, mid-point of PVIN & PGND
4 MODE High for PFM mode
Low for PWM mode
5 EN Enable Input
6 PGND Power Ground
7 SW Switching Node connection to internal PFET & NFET
8 PVIN Power Supply Input to internal PFET switch
9 SVDD Signal Supply Input
10 SGND Analog and Control Ground• Taped-out in Oct 10, 2002, packaged chip returned Jan.20, 2003
• Implemented in 0.25um CMOS

23
Personnel and Roles
• Prof. Seth Sanders, project leader
• Jinwen Xiao, PhD student (5th year), leadership on IC designs
• Angel Peterchev, PhD student (4rd year), leadership on architecture issues
• Kenny (Jianhui) Zhang, PhD student (2nd year), responsibility for power train design

24
• Y.C. Liang, visiting Nov.2001~Sep.2002 from Natl. Univ. Singapore, for advising on power train design
• Joe Emlano for packaging the chip
Thanks To