Modul Ajar 9 - Transformasi Sumbu Koordinat
13
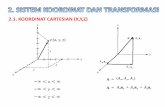
MODUL AJAR 9 TRANSFORMASI SUMBU KOORDINAT Tujuan Pembelajaran Umum : Mahasiswa mampu menyelesaikan analisa struktur dengan cara Struktur Metode Matriks (ASMM) ANALISA STRUKTUR PORTAL 2 DIMENSI Tujuan Pembelajaran Khusus : Mahasiswa mampu menyelesaikan struktur statis tak tentu el portal 2 Dimensi dengan transformasi sumbu koordinat Contoh Soal : 1. Sebuah portal statis tak tentu seperti pada gambar di bawah hitunglah gaya-gaya dalam yang bekerja dengan cara ASMM Diketahui : 4 m E = 1 H = 4 m 4 1 1 1 I = 1 1 q = 1 t/m 1 A = 1 4 m Keterangan: ISIKAN angka 0 atau 1: 1 angka 1 bila melihat jawa angka 0 bila jawaban dihi sementara Langkah-langkah mengerjakan analisa struktur balok 2 Dimensi : 1. Menentukan jumlah degree of freedom tiap satu titik L = I = E = t/m 2 m 4 I = m 2 B C E = A t/m 0
-
Upload
xacoscribd -
Category
Documents
-
view
58 -
download
1
Transcript of Modul Ajar 9 - Transformasi Sumbu Koordinat
Modul 9MODUL AJAR 9TRANSFORMASI SUMBU KOORDINATTujuan Pembelajaran Umum :Mahasiswa mampu menyelesaikan analisa struktur dengan cara AnalisaStruktur Metode Matriks (ASMM)ANALISA STRUKTUR PORTAL 2 DIMENSITujuan Pembelajaran Khusus :Mahasiswa mampu menyelesaikan struktur statis tak tentu elemen balok danportal 2 Dimensi dengan transformasi sumbu koordinatContoh Soal :1. Sebuah portal statis tak tentu seperti pada gambar di bawah ini,hitunglah gaya-gaya dalam yang bekerja dengan cara ASMMDiketahui :L =4mE =1H =4m4I =1E =1t/m21I =1m4I =1q =1t/m1A =1m24mKeterangan:ISIKAN angka 0 atau 1:1angka 1 bila melihat jawabanangka 0 bila jawaban dihilangkansementaraLangkah-langkah mengerjakan analisa struktur balok 2 Dimensi :1. Menentukan jumlah degree of freedom tiap satu titikKeterangan :Deformasi aksial diabaikanTiap titik: 1 dof akibat rotasi sajakarena akibat translasisemua benilai nol2. Menentukan transformasi batangBatang 1:q =270cos270=-0.00sin270=-1.00-0.00-1.000.001.00-0.000.000.000.001.00Batang 2q =0cos0=1.00sin0=0.001.000.000.000.001.000.000.000.001.003. Menyusun matriks Transformasi [ Ri ]-0.00-1.000.000001.00-0.000.00000R1 =0.000.001.00000000-0.00-1.000.000001.00-0.000.000000.000.001.001.000.000.000.000.000.000.001.000.000.000.000.00R2 =0.000.001.000.000.000.000.000.000.001.000.000.000.000.000.000.001.000.000.000.000.000.000.001.004. Menghitung matriks kekakuan sistem strukturElemen 1 :a1 ==0.0156b1 ==16C =-0.00S =-1.00{ T } = { 0 0 0 1 0 2 }Tg1 =a ( b C2 + 12 S2 ) =0.188g2 =a C S ( b - 12 ) =0.000g3 =a ( b C2 + 12 S2 ) =0.250g4 =- a 6 L S =0.375g5 =a 6 L C =-0.000g6 =a 4 L2 =1g7 =a 2 L2 =0.50.188-0.3750.000-0.3751.0000.0000.0000.0000.000Elemen 2 :a2 ==0.0156b1 ==16C =1.00S =0.00{ T } = { 1 0 2 0 0 3 }Tg1 =a ( b C2 + 12 S2 ) =0.250g2 =a C S ( b - 12 ) =0.000g3 =a ( b C2 + 12 S2 ) =0.188g4 =- a 6 L S =0g5 =a 6 L C =0.375g6 =a 4 L2 =1g7 =a 2 L2 =0.50.2500.0000.0000.0001.0000.5000.0000.5001.0005. Menhitung matriks kekakuan global sistem struktur0.438-0.3750.000-0.3752.0000.5000.0000.5001.0006. Menghitung matriks aksi beban luar { Ps }22100-1.3331.3330-1.3331.3337. Menghitung matriks deformasi struktur { Us }0.438-0.3750.00000.500defleksi horisontal di 2-0.3752.0000.500-1.333=-2.000rotasi di 20.0000.5001.0001.3330.667rotasi di 38. Menghitung matriks deformasi masing-masing batang { Ui } Koordinat Global0.0000.5000.0000.0000.000-2.0000.5000.0000.0000.0000.6670.6679. Menghitung matriks deformasi masing-masing batang { Ui } Koordinat LokalElemen 1{ u1 } = [ R1 ] { U1 }-0.00-1.000.000.000.000.000.0000.0001.00-0.000.000.000.000.000.0000.0000.000.001.000.000.000.000.0000.0000.000.000.00-0.00-1.000.000.500-0.0000.000.000.001.00-0.000.000.0000.5000.000.000.000.000.001.000.6670.6671.000.000.000.000.000.000.5000.5000.001.000.000.000.000.000.0000.0000.000.001.000.000.000.00-2.000-2.0000.000.000.001.000.000.000.0000.0000.000.000.000.001.000.000.0000.0000.000.000.000.000.001.000.6670.6679. Menghitung gaya akhir batang { Pi }Elemen 1{ P1 } = [ K1 ] { u1 } + { PR1 }0.2500.0000.000-0.2500.0000.0000.0000.0000.0000.1880.375-0.000-0.1880.3750.0000.0000.0000.3751.0000.000-0.3750.5000.0000.000-0.2500.0000.0000.2500.0000.000-0.0000.0000.000-0.188-0.3750.0000.250-0.3750.5000.0000.0000.3750.5000.000-0.3751.0000.6670.0000.2500.0000.000-0.2500.0000.0000.5000.0000.0000.1880.3750.000-0.1880.3750.0002.0000.0000.3751.0000.000-0.3750.500-2.0001.333-0.2500.0000.0000.2500.0000.0000.0000.0000.000-0.188-0.3750.0000.188-0.3750.0002.0000.0000.3750.5000.000-0.3751.0000.667-1.3330.000-0.3000.0000.1250.3752.2400.156-0.500-0.1090.6830.146-1.667-0.0000.300-0.000-0.125-0.3001.760-0.1250.500-0.683-0.0000.479-0.33310. Free Body Diagram0-0.3750.1090.683-0.3000.683-0.000010.3000.3002.2401.76010. Menggambar gaya-gaya dalamBidang M0.1090.683-0.0000.683Bidang D-0.3001.760-0.3002.240Bidang N0.3000.300
3K1 =K1 =K2 =K2 =2 x 2Ks =Ks -1 =2 x 2BCE =At/m12123003100200Sumbu Global
DOF [ Ks ] 3 x 3121232455613Sumbu Lokal
DOF [ k ] 3 x 361322412xx1q = 270ol1 =C S 0-S C 0 0 0 1=23xxq = 0ol2 =C S 0-S C 0 0 0 1Ps =US =U1 =12+-=K1 =g1 g2 g4 -g1 -g2 g4
g3 g5 -g2 -g3 g5
g6 -g4 -g5 g7
g1 g2 -g4
g3 -g5
-g4 g60 0 0 1 0 20
0
01
0
2K1 =g1 -g4 0
-g4 g6 0
0 0 0K1 =K1 =g1 g2 g4 -g1 -g2 g4
g3 g5 -g2 -g3 g5
g4 g6 -g4 -g5 g7
g1 g2 -g4
g3 -g5
g4 g7 g61 0 2 0 0 31
0
20
0
3K1 =g1 g4 g4
g4 g6 g7
g4 g7 g6K1 =KS =Us =U2 =u1 ==u2 ==P1 =+P2 =+P1 =P2 =+-++-+
MBD00015337.unknown
MBD0003021A.unknown
MBD00031000.unknown
MBD00017278.unknown