
Modélisation et Simulation de Milieux Poreux par …hydrologie.org/THE/PIERITZ.pdf · Résumé Les...
221
THESE présentée par Romeu André PIERITZ Ingénieur Mécanique de l’Université Fédérale de Santa Catarina – UFSC - Brésil Master of Sciences and Engineering de l’Université Fédérale de Santa Catarina – UFSC - Brésil pour obtenir le titre de DOCTEUR de l’Université Joseph Fourier – Grenoble I (Arrêtés ministériels du 5 juillet 1984 et du 30 mars 1992) Spécialité : Géophysique, Géochimie et Géomécanique Modélisation et Simulation de Milieux Poreux par Réseaux Topologiques Date de Soutenance : 02/12/1998 Composition du jury : M. P.C. PHILIPPI M. F.H. WITTMANN Rapporteur M. J.F. DAIAN M. J.P. LAURENT Directeur de Thèse Mme. A. MONTANVERT M. J.B. BRZOSKA M. R. HAVERKAMP Examinateur Thèse préparée au sein du Laboratoire d’Etude des Transferts en Hydrologie et Environnement LTHE - UMR 5564 CNRS-ORSTOM-INPG-UJF
Transcript of Modélisation et Simulation de Milieux Poreux par …hydrologie.org/THE/PIERITZ.pdf · Résumé Les...

THESE présentée par
Romeu André PIERITZ Ingénieur Mécanique
de l’Université Fédérale de Santa Catarina – UFSC - Brésil Master of Sciences and Engineering
de l’Université Fédérale de Santa Catarina – UFSC - Brésil
pour obtenir le titre de DOCTEUR
de l’Université Joseph Fourier – Grenoble I (Arrêtés ministériels du 5 juillet 1984 et du 30 mars 1992)
Spécialité : Géophysique, Géochimie et Géomécanique
Modélisation et Simulation de Milieux Poreux
par Réseaux Topologiques
Date de Soutenance : 02/12/1998 Composition du jury :
M. P.C. PHILIPPI M. F.H. WITTMANN
Rapporteur
M. J.F. DAIAN M. J.P. LAURENT
Directeur de Thèse
Mme. A. MONTANVERT M. J.B. BRZOSKA M. R. HAVERKAMP
Examinateur
Thèse préparée au sein du Laboratoire d’Etude des Transferts en Hydrologie et Environnement
LTHE - UMR 5564 CNRS-ORSTOM-INPG-UJF

Résumé
Les propriétés de transfert de fluides dans le milieu poreux sont liées à la complexité géométrique de la
structure du réseau. Cette structure complexe est caractérisée par des propriétés géométriques liées à
la forme (morphologiques) et à la connexion (topologiques) entre les pores. Un des premiers objectifs
de ce travail est de caractériser la microstructure par le développement des méthodologies de
description topologique de la géométrie en 3D. Ces opérateurs géométriques sont basés sur la
mathématique algorithmique (géométrie discrète) permettant de réduire l'information à des "squelettes"
discrets. L'application des squelettes permet la détermination d'une "fonction de distribution
topologique" basée sur une description du type de réseaux (sites et liens). Les descripteurs de forme
sont ensuite appliqués sur des échantillons générés numériquement (géométries simples, complexes et
"fissurées"). Ainsi, diverses analyses morphologiques et topologiques sont réalisées pour étudier le
rapport géométrique entre les sections et leurs volumes respectifs. Le deuxième objectif de ce travail
est la modélisation des processus de transferts de fluides à travers des squelettes. Deux méthodes sont
présentées: une méthode géométrique et une basée sur l'analogie électrique. La méthode de simulation
géométrique est appliquée sur les sections et les volumes pour l'observation de l'influence de la
topologie dans l'intrusion et l'extrusion d'un fluide non-mouillant. Un modèle de pores cylindriques
élémentaires connectés est proposé pour estimer une conductivité hydraulique à saturation à partir du
"graphe" associé au squelette. La méthode de simulation utilise une analogie électrique à travers d'une
solution numérique optimisée pour résoudre le système. La comparaison des résultats entre les
structures permet d'observer l'influence de la complexité géométrique du réseau sur les propriétés de
transfert.
Mot clé: Géométrie discrète, morphologie, topologie, squelette discret, sites et liens, distribution
topologique, simulation géométrique, intrusion / extrusion d'un fluide, analogie électrique, conductivité
hydraulique.


Abstract
The porous media transport properties are related to the geometrical complexity of the network
structure. This complex structure is distinguished by geometrical properties related to the shape
(morphological) and to the links (topological) between the pores. The first objective of this work is the
development of topological description methods to characterize the 3D micro structure geometry. These
geometrical operators are proposed in the "algorithmical" mathematics (discrete geometry) allowing the
reduction of the information to discrete "skeletons". This approach allows us to determine a "topological
distribution function" through a network description (sites and bonds). Shape descriptors are then used
over generated numerical data (simple geometry, complex geometry and "cracks"). Therefore, different
morphological and topological analysis are made to interpret the geometrical relation between image
sections and their respective volumes. The second objective of this work is modeling fluid transport
phenomena by skeletons. Two methods are proposed: a geometrical method and one based on
electrical analogy. The geometrical simulation method is applied over 2D sections and their volume to
observe the topology contribution to capillary nonwetting phase flow displacements. Connected
elementary cylindrical model is proposed to evaluate the saturated hydraulic conductivity, from the
associated skeleton "graph". The simulation method uses an electrical analogy with special numerical
solution method to find the system solution. The comparison of data between the structures allow the
identification of the influence of the network geometric complexity over transport properties.
Key word: Discrete geometry, morphology, topology, discrete skeleton, sites and bonds, topological
distribution, geometrical simulation, capillary displacements, electrical analogy, hydraulic conductivity


Notations et Conventions
Ms Masse des constituants solides Vs Volume des constituants solides ρs Masse volumique réelle ρ Masse volumique apparente sèche V Volume apparent du milieu ε Porosité du milieu Vv Volume de vides εd Porosité du milieu discret k Perméabilité hydraulique θads Teneur volumique en eau adsorbée P Pression ∆P Différence de pression Pc Pression capillaire R Rayon Rc Rayon capillaire Q Débit v Vitesse fictive Vr Vitesse moyenne de pore S Surface de la section Sv Surface de la section du volume τ Tortuosité θ Teneur en eau η viscosité dynamique du fluide G Conductance hydraulique Gélec Conductance électrique I Courant électrique ∆U Différence de potentiel L Longueur caracteristique Lv Longueur caracteristique du volume Géq Conductance hydraulique équivalente Re Résistance électrique Gij Conductance élémentaire entre deux nœuds i et j Lij Longueur élémentaire entre deux nœuds i et j Rij Rayon moyen entre deux nœuds i et j Kéq Conductivité équivalente Z Impédance électrique Zéq Impédance électrique équivalente Z3 L'espace discret en 3 dimensions Z2 L'espace discret en 2 dimensions R3 L'espace réel en 3 dimensions

E3 Espace Euclidien en 3 dimensions d8 Masque 2D de voisinage avec 8 éléments d6 Masque 3D de voisinage avec 6 éléments d26 Masque 3D de voisinage avec 26 éléments d18 Masque 3D de voisinage avec 18 éléments d34 Masque de chanfrein 2D (métrique 3) d5711 Masque de chanfrein 2D (métrique 5) d345 Masque de chanfrein 3D (métrique 3) e Nombre de Euler LUT Table de correspondance pour les distances de chanfrein Bd(Cd, Rr) Boule discrète Cd(x,y,z) Centre géométrique de la boule discrète Rr
Raio de la Boule discrète dc(Rr+∆d) Distance de contact entre centres ∆d Variation de distance If Critère d’interférence entre éléments - superposition Bc Boule candidate F(R) Fonction de distribution de rayons Ω( ) Générateur de nombres aléatoires DM Carte de distance DM-1 Reconstruction de la carte de distance à partir de transformation inverse
d'un squelette VDM Carte de distance volumétrique VDM-1 Reconstruction de la carte de distance volumétrique à partir de
transformation inverse d'un squelette AM L'axe médian 2D et 3D LM Ligne médiane 2D LMn Ligne médiane 2D orthogonale aux bords LMV Ligne médiane volumique - 3D (surface médiane) LMVF Ligne médiane volumique filtrée LMVn Ligne médiane volumique orthogonale aux frontières LMVFn Ligne médiane volumique filtrée orthogonale aux frontières GLM Graphe de la ligne médiane GLMG Graphe de la ligne médiane généralisé M Matrice MR Matrice de représentation du graphe NC Nœud central NP Nœud de proéminence NCo Nœud de connexion NS Nœud strict FID Front d'intrusion et d'extrusion NFID Complémentaire du front d' intrusion et d'extrusion sur le squelette ISS Index de surface spécifique VER Volume élémentaire de contrôle Ybus Matrice Bus Admittance Zbus Matrice Bus Impédance



Table des Matières
Introduction
1
Chapitre 1 - Description Des Milieux Poreux - Phénomènes de Transferts 5
1.1 Introduction 71.2 La Géométrie des Milieux Poreux 8
1.2.1 La Structure Solide 81.2.2 La Structure Poreuse 9
1.3 L’eau en Milieu Poreux 101.4 Transport D’eau en Milieu Poreux 13
1.4.1 Echelle Microscopique – Pores 131.4.1.1 Loi de Poiseuille 131.4.1.2 Imbibition et Extrusion 141.4.1.3 Phénomène d’Hystérésis 151.4.1.4 Modèles de Simulation 16
1.4.2 Echelle Macroscopique 211.4.2.1 La Loi de Darcy 221.4.2.2 Modèles de Simulation 23
1.5 Caractérisation Hydrique - Les Sols 261.5.1 Dynamique en Milieu Saturé 26
1.5.1.1 Approche Microscopique 271.5.1.2 Approche Macroscopique 271.5.1.3 La Conductivité Hydraulique à Saturation 28
1.5.2 Dynamique en Milieu Non Saturé 291.5.2.1 La Conductivité Hydraulique 30
1.5.3 Détermination Expérimentale 311.6 Synthèse du Chapitre 32 Chapitre 2 - La Géométrie Discrète et la Description de Formes 35
2.1 Introduction 372.2 La Géométrie Discrète 37
2.2.1 Définitions et Notions de Base en 2D – L’analyse d’image 382.2.1.1 Voisinages et Connexité 382.2.1.2 Distances Discrètes 402.2.1.3 Distance Euclidienne 422.2.1.4 Distance de Chanfrein 422.2.1.5 Carte de Distances – Schéma Algorithmique 432.2.1.6 Transformation Inverse 442.2.1.7 Les Cercles Discrets 452.2.1.8 Taux d’Erreur 46
2.2.2 Définitions et Notions de Base en 3D – L’analyse du Volume 472.2.2.1 Voisinage, Connexité et Nombre d’Euler 472.2.2.2 Distances Discrètes dans Z3 - Distance Euclidienne 49

2.2.2.3 Distance D6 502.2.2.4 Distance D26 512.2.2.5 Distance D18 522.2.2.6 Distances de Chanfrein 532.2.2.7 Volume de Distances – Schéma Algorithmique 532.2.2.8 Transformation Inverse 542.2.2.9 Les Sphères Discrètes 552.2.2.10 Taux d’Erreur 56
2.3 La Description de Formes 562.3.1 Modèles de Représentation en 2D 57
2.3.1.1 L'axe Médian 572.3.1.2 Maxima Locaux 592.3.1.3 Réversibilité 602.3.1.4 Propriétés de L’axe Médian 602.3.1.5 La Ligne Médiane 602.3.1.6 Propagation des Chemins 612.3.1.7 Graphe de La Ligne Médiane 62
2.3.2 Modèles de Représentation en 3D 632.3.2.1 Axe Médian 642.3.2.2 Surface Médiane 692.3.2.3 La Surface Médiane Normale aux Bords - LMVn 712.3.2.4 La Surface Médiane Filtrée LMVF – Filtre Topologique 732.3.2.5 Graphe de La Surface Médiane Généralisé 73
2.4 Synthèse du Chapitre 74 Chapitre 3 - Génération et Analyse Morpho-Topologique de Structures 3D 75
3.1 Introduction 823.2 Méthodologies de Génération - Générateurs Discrets 82
3.2.1 Structures Régulières - Contrôle Morpho-Topologique 823.2.2 Fonction Distribution Granulométrique 833.2.3 Milieu Fissuré 843.2.4 Colonnes 863.2.5 Reconstruction Volumique par Sections en Série 88
3.3 Méthodologies d'Analyse 913.3.1 Mesures Morphologiques 91
3.3.1.1 Porosité 913.3.1.2 Granulométrie 913.3.1.3 Volume Elémentaire 933.3.1.4 Index De Surface Spécifique - ISS 93
3.3.2 Mesures Topologiques 943.3.2.1 Distribution de Sites et Liens 943.3.2.2 Fonction Distribution Topologique 97
3.4 Génération de Structures 3D 983.4.1 Structure Régulier 98
3.4.1.1 Sphères sans Connexion 993.4.1.2 Sphères avec Connexion 1043.4.1.3 Comparaison de Résultats 108
3.4.2 Structure Irrégulière 1093.4.2.1 Fonction Distribution Gaussienne 1093.4.2.2 Le Milieu Fissuré 1173.4.2.3 Comparaison de Résultats 122
3.4.4 L'analyse Géométrique de la Neige 3D 1233.5 Synthèse du Chapitre 128
Chapitre 4 - Modélisation et Simulation de Propriétés de Transferts 131
4.1 Introduction 1334.2 Méthode géométrique - Simulation de l'intrusion et de l'extrusion d'un fluide non-mouillante
134
4.2.1 Présentation de la méthode 1344.2.2 Limitations 1374.2.2 L’intrusion et l'extrusion d'un fluide non-mouillant dans les sections 2D 1374.2.3 L’intrusion et l'extrusion d'un fluide non-mouillant en 3D 1464.2.3 Distribution de la taille de pores 3D 157
4.3 Méthode matricielle - Estimation de la Perméabilité sur le GLMG 160 4.3.1 La matrice de représentation du graphe - MR 163
4.3.2 Analogie électrique - les Matrices YBus 1644.3.3 Résolution numérique optimisée - décomposition LU 1674.3.4 La sensibilité géométrique 1684.3.5 Estimation de K pour les échantillons numériques 170
Conclusion Générale 173 Bibliographie 177 Annexe A Morphologie Mathématique – Granulométrie par Erosion et DilatationAnnexe B The Generalised Median Line Graphics Technique in Porous Media Geometry Characterisation Annexe C Discrete Multiphase Equilibrium Simulation in Porous MediaAnnexe D Calcul Numérique de Courbures Tridimensionnelles : Application à la Neige Humide Annece E Développements


Table de Figures
[1] La complexité géométrique d'une structure réelle. 7[2] L'ascension capillaire d'un liquide mouillante 12[3] Fig. 2.2 - Représentation d'une image discrète 38[4] Voisins directs (a) et indirects (b) 39[5] Dualité des connexités 40[6] Disques unité de (a) d4 et (b) d8 41[7] DM pour (a) d4 et (b) d8 42[8] Pondérations locales 43[9] DM pour (a) d3,4 et (b) d5,7,11 43[10] Masques séquentiels 44[11] DM pour d3,4 en 2 balayages séquentiels 44[12] DM-1 pour d3,4 en 2 balayages séquentiels 45[13] Cercles discrètes de d3,4 45[14] Les cercles discrètes selon la distance 46[15] L'erreur rapportée à la distance Euclidienne 46[16] L'erreur rapportée à la distance Euclidienne 46[17] Les 6 directions de l'espace. 48[18] Objets 3D 49[19] Une sphère réelle et ça boule euclidienne discrète. 50[20] La voisinage d'un point selon d6 51[21] La 26-voisinage d'un point selon d26 52[22] Le 18-voisinage d'un point selon d18. 53[23] La masque de chanfrein d345 (d26-vosinage); 53[24] Masques séquentiels pour la distance du chanfrein d345 54[25] La boule discrète selon d6 (a) et selon d18 (b). 55[26] La boule discrète selon d26 55[27] Le boule discrète avec le chanfrein d345 56[28] Axe médian obtenu avec des cercles. 58[29] L’axe médian après correction par la LUT (c,d) 59[30] Les points de AM (gris) et les points de reconnexion (carré) 60[31] L’axe médian et la ligne médiane 62[32] Le graphe de la ligne médiane généralisée 63[33] L’axe médian 3D pour une sphère. 65[34] L'axe médian 3D pour la sphère obtenue sans LUT 65[35] L'axe médian 3D avec l'application de la LUT 66[36] L’axe médian discret (avec d345) pour un cube 66[37] L’axe médian pour l’ensemble de boules connectés 67[38] L'axe médian pour un volume générique 68[39] La surface médiane 69[40] La LMn selon la frontière dans l’infini 70[41] La LMVn 71[42] La surface médiane filtrée LMVF et la LMVFn 72[43] Comparaison entre le profil de volume reconstruit 73[44] Le GLMG pour le LMV et pour le LMVFn 74

[45] La génération d'un milieu 2D irrégulier 82[46] La fissure générée selon la diagonale principale 84[47] Une colonne multi-couche 85[48] Image après la coupure et après la sublimation 86[49] Image différentielle (a) et après seuillage (b). 87[50] L’image filtrée par les dilatations successives 88[51] Empilement successif des sections binaires 89[52] Comparaison entre le profil volumique de la phase solide 90[53] Comparaison entre Granulométrie 92[54] La caractérisation d'un réseau de pores 95[55] Le volume des liens 97[56] Le volume des sites 97[57] L’empilement régulier de sphères et la section 2D 99[58] L’empilement régulier de sphères sans contact 100[59] La mesure d’un VER pour la phase solide et porosité en Z 100[60] Granulométrie par ouverture pour la phase solide 3D 101[61] Granulométrie par ouverture pour la phase poreuse 3D 101[62] Distribution de grains pour la phase solide 102[63] Image des liens dans la phase poreuse segmentée 102[64] Distribution de grains pour la phase solide par le GLMG 103[65] Distribution de sites pour la phase poreuse 104[66] La surface topologique pour la phase poreuse 3D. 104[67] L’empilement régulier de sphères et la section 2D 105[68] VER pour la phase solide 105[69] Granulométrie par ouverture pour la phase solide 3D 106[70] Granulométrie par ouverture pour la phase poreuse 3D 106[71] Distribution de taille de grain pour la phase solide 107[72] Image des liens dans la phase solide segmentée 107[73] Distribution de taille de grain pour la phase solide 3D 107[74] Distribution de taille de pores pour la phase poreuse 3D 108[75] La surface topologique pour la phase la poreuse 3D 108[76] Le milieux discret généré avec une distribution gaussiene 109[77] Image de la section XY (a) , section XZ (b) et YZ (c) 110[78] VER pour la phase solide et le profil de porosité en Z (b) 110[79] Granulométrie par ouverture pour la phase solide 3D 111[80] Granulométrie par ouverture des XY,XZ et YZ en 2D 111[81] Granulométrie par ouverture pour la phase poreuse 3D 112[82] Granulométrie par ouverture des sections XY,XZ et YZ 112[83] Distribution de taille de grains pour les site et pour le liens 113[84] Distribution de taille de grains pour les site et pour de la section XY 113[85] Surface topologique pour la section XY 2D 114[86] Surface topologique pour la section XZ 2D 114[87] Surface topologique pour la section YZ 2D 114[88] Surface topologique pour la section XY 2D 115[89] Surface topologique pour la section XZ 2D 115[90] Surface topologique pour la section YZ 2D 115[91] Distribution de taille grains et pour le liens 116[92] Distribution de taille de pores et pour le liens 116[93] Surface topologique de la phase solide 117[94] L'image des fissures 117[95] Image de la section XY, XZ et YZ pour le milieu fissure 118[96] VER pour la phase solide et le profil de porosité en Z (b) 118[97] Granulométrie par ouverture pour la phase solide 3D 118[98] Granulométrie par ouverture pour la phase poreuse 3D 119[99] Distribution de taille de grain pour les sites et liens 119[100] Distribution de taille de grain pour la section XY par le GLMG 120[101] Surface topologique pour la section XY 2D solide 120[102] Surface topologique pour la section XZ 2D solide 120

[103] Surface topologique pour la section YZ 2D solide 121[104] Distribution de taille de grain et pour les liens du solide 3D 121[105] Distribution de taille de pores et pour les liens de la phase poreuse 3D 122[106] Surface topologique pour le volume 3D fissuré. 122[107] Sections du volume de neige surgelée 123[108] Image de la section XY , XZ , YZ 124[109] VER pour la phase solide et le profil volumique en Z (b) 124[110] Granulométrie par ouverture pour la phase solide 3D 124[111] Granulométrie par ouverture pour la phase poreuse 3D 125[112] Distribution de sites par le GLMG pour la phase solide 2D 125[113] Distribution de sites par le GLMG pour la phase poreuse 2D 125[114] Superficie topologique pour la section XY 2D 126[115] Superficie topologique pour la section XZ 2D 126[116] Superficie topologique pour la section YZ 2D 126[117] Distribution de sites et pour le liens par le GLMG 127[118] Distribution de sites et pour le liens de la phase poreuse 3D 127[119] Superficie topologique pour la phase solide 127[120] Un modèle de système poreux 135[121] L'intrusion d'un fluide non-mouillante 136[122] La extrusion d'un fluide non-mouillante 136[123] L’image de la section XY, XZ et YZ avec le squelette LMn 137[124] L’image de la section XY après l'intrusion et extrusion 138[125] Les courbes d'intrusion et d'extrusion en 2D pour la section XY 139[126] L’image de la section XZ après l'intrusion et extrusion 140[127] Les courbes d'intrusion et d'extrusion en 2D pour la section XZ 140[128] L’image de la section YZ du milieu Gaussien après l'intrusion 141[129] Les courbes d'intrusion et d'extrusion en 2D pour la section YZ 141[130] L’image de la section XY, XZ, et YZ. 142[131] L’image de la section XY du milieu Gaussien fissuré 143[132] Les courbes d'intrusion et d'extrusion en 2D pour la section XY 143[133] L’image de la section XZ du milieu Gaussien fissuré 144[134] Les courbes d'intrusion et d'extrusion en 2D pour la section XZ 144[135] L’image de la section YZ du milieu Gaussien fissuré 145[136] Les courbes d'intrusion et d'extrusion en 2D pour la section YZ 145[137] L’intrusion 3D d’un fluide non-mouillant 147[138] L'extrusion 3D d’un fluide non-mouillant 148[139] Les profiles pour l’intrusion et l'extrusion d'un fluide non-mouillant en 3D 149[140] Le squelette normal aux frontières LMVn pour la phase poreuse 150[141] Les profils pour l’intrusion en 3D 151[142] Les profils pour l’extrusion en 3D 152[143] Les courbes d'extrusion en 3D pour le milieu Gaussien 153[144] Les sections du squelette normal aux frontières 154[145] Les profiles pour l’intrusion 155[146] Les profiles pour l’extrusion 156[147] Les courbes d’intrusion et à partir de tous les surfaces 157[148] La comparaison entre les distribution de taille de pores 159[149] La comparaison entre les distribution de taille de pores 160[150] Conductance équivalente d'un réseau de pores 162[151] Les graphes non-orienté (a) et orienté (b) 163[152] La représentation matricielle d'un graphe 164[153] Graphe associée d'un Réseau Electrique 165[154] Schéma d'ajout de branches et de liens 166[155] Un volume traversée pour un tuyau de diamètre 1voxel 169[156] Un volume traversée pour un tuyau de diamètre 1voxel 169[157] Un volume traversée pour un tuyau de diamètre 1voxel 170[158] Le GLMG à partir de la LMVFn pour le milieu Gaussien 171[159] Le GLMG à partir de la LMVFn pour le milieu Fissuré 171


Introduction - 1
Introduction

Introduction - 2
Introduction - 3
Le milieu poreux est un système multi-phasique (solide, liquide, vapeur) où les propriétés physiques de
transport micro et macroscopiques sont déterminées par l'interaction entre la structure géométrique et
le fluide. Le fluide présent dans le système lacunaire est multi-phasique et multi-composante (par
exemple l'eau vapeur/liquide plus l'air), avec un couplage phénoménologique complexe entre
l'absorption de la vapeur, les effets capillaires du liquide et la température. Selon l'échelle d'analyse, la
modélisation et la simulation de ces phénomènes pour la détermination des fonctions caractéristiques
(isotherme d'adsorption - pression capillaire - perméabilité) sont couplées à l'information géométrique
qui peut être simplifiée en fonction de la propriété physique d'intérêt (par exemple: problème
isothermique et analyse locale).
La solution adoptée au problème de transport du système vapeur/liquide dans le milieux poreux est
caractérisée par l'échelle (micro/macro), déterminant le modèle représentatif de la structure
géométrique. Les méthodes actuelles de description de la géométrie (phase solide/poreux) sont basées
exclusivement sur les mesures de la forme, qu’on appelle des mesures "morphologiques" (taille des
éléments géométriques et composition du matériel solide) qui sont caractérisées par les paramètres
porosimétriques, granulométriques et de texture.
Le travail présenté dans ce document a pour objectif principal de développer une formulation
mathématique robuste de la structure complexe du milieu, basée sur les concepts de la géométrie (2D
et 3D), pour essayer de prendre en compte la réalité géométrique dans les modèles de simulation des
propriétés de transfert. Les principales conditions pour la formulation proposée sont: solution unique,
réversibilité, multiplicité d'échelles et performance (rapidité et simplicité pour les approximations
théorique/numérique). Pour cela, une approche de la géométrie Euclidienne appelée "Géométrie
Discrète" (adaptée aux contraintes de l'informatique) est abordée. Selon ces concepts, des outils
mathématiques nécessaires à la mesure des paramètres morphologiques et topologiques de la
structure sont développés, permettant une représentation de la forme par des opérateurs géométriques.
A partir de ces opérateurs géométriques, le deuxième objectif de ce travail est l'exploration des
méthodes de simulation basées sur des approximations (graphiques/électriques), et l'application de ces
concepts à l'étude de l'influence de la topologie sur les processus de transfert.
La structure de ce document comporte 4 chapitres. Dans le chapitre 1, ou rappel des différentes
analyses et couplages phénoménologiques liés aux différents domaines d'études des milieux poreux,
avec les concepts géométriques de base et les paramètres indispensables. Les propriétés de transport
fluide/vapeur dans les échelles micro poreuses sont analysées, avec une discussion sur les méthodes
d'observation et de modélisation numériques et analytiques.
Le deuxième chapitre introduit les notions de base et les concepts développés pour l’adaptation de la
géométrie Euclidienne (espace continue) à l’espace discret traité par l’ordinateur. A partir de ces
Introduction - 4
concepts et algorithmes, les descripteurs structuraux de la forme en 2D et 3D sont développés pour
conserver et représenter la morphologie et la topologie du milieu.
Le chapitre 3 aborde le développement de méthodologies performantes de génération des structures
discrètes en 3D (régulières, irrégulières et fissurées) pour l’étude et le développement de techniques
numériques pour la mesure des paramètres topologiques, et pour permettre l'étude de la forme et de
l’organisation structurale pour prendre en compte les différences entre l'analyse de la section et du
volume.
L'application de ces descripteurs de la forme est présentée dans le chapitre 4 pour évaluer les
déplacements capillaires d’écoulements multi-phasiques et pour l’estimation de la conductivité
hydraulique à saturation équivalente d'un milieu. Enfin, les conclusions et perspectives sont
présentées.
Pour aider la compréhension du texte:
- Tous les chapitres ont une introduction, pour présenter le problème fondamental, abordée avec les
principales sources bibliographiques suivies par la description des objectifs d'étude et la structure
logique du chapitre.
- Les expressions et termes descriptifs qui sont employés dans le texte sont répertoriés dans la table
de notations et conventions, avec une note explicative sur les détails techniques au bas des pages
respectives dans le contexte du chapitre.
- A la fin de chaque chapitre est présentée une synthèse des sujets abordés avec les principales
conclusions et remarques.
- Les documents présentés dans les annexes ont pour objectif de permettre une consultation
complémentaire à propos des divers sujets abordés. Pour cela, l'annexe A fait une introduction aux
concepts fondamentaux de la morphologie mathématique pour l'interprétation des résultats du
chapitre 3. L'annexe B présente le développement de l’analyse graphique dans la section 2D d'un
milieu pour l'interprétation géométrique d'une structure poreuse. L'annexe C présente un cas
complémentaire pour la simulation de processus d'intrusion et d'extrusion dans la section poreuse
(développé dans §4). L'annexe D introduit la méthodologie expérimentale pour l'acquisition des
images en série pour la reconstruction volumique d'un échantillon (décrit dans §3). L'annexe E
présente les divers développements informatiques avec les solutions adoptées pour ce travail de
recherche, et aussi pour les travaux en partenariat avec d'autres chercheurs.

Introduction - 5

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 5
Chapitre 1 Description des Milieux Poreux - Phénomènes de transferts
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 6

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 7
1.1 Introduction
L'étude et la modélisation des propriétés physiques de transfert des fluides dans le milieu poreux sont
étroitementes lie à la description de la géométrie micro et macro poreuse, [Adler, 1992; Meng, 1994;
Quiblier, 1984]. Les phénomènes de transfert fluide et vapeur ont des spécificités liées au problème
d'échelles d'observation de la structure [Perrin, 1985; Philippi, 1992; De Souza, 1993].
L'objectif de ce chapitre est introduire les différentes analyses et couplages phénoménologiques lies
aux divers domaines d'études des milieux poreux et indiquer les lignes générales de recherche décrites
dans ce mémoire.
Fig. 1.1 - La complexité géométrique d'une structure réelle.
D'abord sont introduits les concepts géométriques de base avec les paramètres. Les propriétés de
transfert fluide/vapeur dans les échelles micro poreuses sont analyses, avec une analyse des méthodes
d'observation et modélisation numérique analytique pour l'échelle de Darcy. Les paramètres d'intérêt en
la physique des sols sont abordés, et à la fin sont présentées les conclusions et les motivations
générales de ce travail.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 8
1.2 La Géométrie des Milieux Poreux
L’étude de l’organisation ou structure d’un matériau poreux peut s’effectuer selon deux approches
fondamentalement différentes, mais complémentaires. La première s’attache en effet à décrire le mode
d’assemblage des éléments constitutifs de la phase solide, alors que la seconde s’oriente vers la
description du réseau d’espaces lacunaires généré par la structuration du matériel, [Guyon, 1994]. Dans
les deux cas, l’analyse quantitative repose exclusivement sur des critères de nature géométrique.
Dans la mesure où l’agencement des espaces lacunaires est une conséquence de la structuration du
matériau, leur étude offre une méthode pour décrire l’organisation des vides, dont l’influence est
déterminante sur le comportement physique du milieu, notamment en termes de processus de
transferts. La figure 1.1 présenté la complexité de la micro structure géométrique d'un os atteint
d'ostéoporose (micro tomographie par rayons X - résolution 8 µm - taille de l'échantillon 2,5x4 mm).
1.2.1 La structure solide
La structure du milieu découle essentiellement de la distribution granulométrique de ses éléments. La
notion d’éléments structuraux cohérents et distincts conduit à une approche quantitative de la structure,
de type granulométrique, reposant sur la mesure de taux d’agrégation spécifiques, [Guéguen, 1993].
Cette méthode consiste à déterminer, la proportion pondérale d’éléments solides de taille inférieure
participant à la constitution d’éléments structuraux. Elle est toutefois relativement peu précise,
notamment à cause de son caractère destructif. La notion de microstructure se réfère ainsi au mode
d’assemblage des constituants granulométriques.
A l’échelle macroscopique, les éléments structuraux observés visuellement peuvent être considérés
comme des assemblages d’agrégats. En second lieu intervient la présence de fissures délimitant, à
l’échelle macroscopique, des éléments structuraux. La taille et la forme de ces éléments déterminent
alors toute une gamme de structures type.
Les structures particulaires se caractérisent ainsi par l’absence d’éléments fins, en raison de l’absence
de liens entre les éléments, ces structures sont peu cohérentes et caractérisées par la disposition
relative des particules. Cette disposition n’est toutefois pas incorporée à la description, qui se limite à la
dimension des particules. Lorsque les particules sont trop fines pour être discernées à l’œil nu on parle
de type cendreux et dans le cas contraire de type sableux.
Les structures non particulaires comprennent les structures continues ou compactes et les structures
fragmentaires. Dans le cas des structures continues, le milieu semble former un seul bloc dépourvu de
fissures et de forte cohésion. Une distinction est à nouveau faite selon la taille des particules présentes
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 9
dans ces structures et l’on parle de type ciment lorsque tous les éléments sont fins, de type grès pour
des particules soudés par le ciment, de type poudingue lorsque contient des "cailloux". Les structures
fragmentaires, assurément les plus courantes, sont constituées d’éléments associés par des liens
visibles.
La phase solide est caractérisée par sa masse volumique réelle, soit par la masse de ses constituants
solides Ms rapportée à leur volume Vs :
s
ss V
M=ρ (1.1)
La masse volumique apparente sèche, est la masse de ses constituants solides Ms rapportée au
volume total apparente du milieu V :
VV
VM sss ρ
ρ == (1.2)
1.2.2 La structure poreuse
L’analyse quantitative des espaces lacunaires découlant de la structuration du milieu repose sur des
critères de nature géométrique, [Giona, 1994; Philippi, 1994]. Les caractéristiques du réseau des vides
sont ainsi décrites de manière globale par leur volume total relatif, la porosité du milieu ε. Celle-ci est
définie par le rapport du volume des vides Vv au volume total apparent du milieu V:
VV-V
VV sv
== ε (1.3)
La description du système poral peut cependant être affinée en prenant en considération la distribution
de la tailles des pores et micro-conduits divers constituant le réseau d’espaces lacunaires, en une
approche analogue à l’analyse granulométrique. Il est ainsi possible d’établir une courbe, dite
porosimétrique, donnant la proportion volumique du système poral constituée de pores de diamètre
apparent inférieur à un diamètre donné.
Le système poral, considéré comme un réseau communiquant de pores et de conduits de faibles
dimensions, peut être décomposé en plusieurs classes de porosité. C’est la raison pour laquelle on
parle parfois de porosité résiduelle pour la partie du système poral constituée de pores occlus,
dépourvus de communications avec le reste des espaces lacunaires et avec l’extérieur, les pores
communiquants formant alors la porosité effective.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 10
La porosité effective est de plus arbitrairement subdivisée en deux parties, la macroporosité ou porosité
efficace, correspondant à la partie du système poral dans laquelle se déroule l’essentiel des processus
de transferts, d’eau et d’air notamment, et la microporosité ou porosité capillaire, correspondant à la
partie du système poral à laquelle les faibles diamètres des orifices confèrent la propriété d’empêcher
l’écoulement gravitaire de l’eau.
1.3 L’eau en Milieu Poreux
La description quantitative de la phase liquide en termes de caractéristiques relatives repose sur la
notion de teneur en eau volumique, définie par le volume relatif de la phase liquide rapporte au volume
apparente total du milieu :
VVw
w == θθ (1.4)
La teneur en eau pondérale est définie par le rapport de la masse de la phase liquide à celle de la
phase solide :
s
w
MM
w = (1.5)
Du point de vue de l'état physique, on peut distinguer trois types d'eau en milieu poreux:
-la vapeur contenue dans la phase gazeuse;
-l'eau adsorbée à la surface des pores en couches mono ou multi moléculaires, fortement soumise aux
forces d'interaction avec la matrice solide;
-l'eau capillaire remplissant une partie des pores du matériau, soumise à des conditions dues à la
tension interfaciale liquide-gaz et au contact entre l'interface et le solide.
Dans ce mémoire qui traite des milieu poreux sur une base essentiellement géométrique, sont proposés
des outils permettent de quantifier la présence d'eau capillaire en relation avec la morphologie et la
topologie du matériau, et de modéliser l'écoulement dans les pores. Nous nous limiterons donc à l'étude
de l'eau capillaire.
Cette limitation exclut du champ de notre travail d'une part les phénomènes de transport à basse
saturation ou sous gradient de température, où le transport de la vapeur joue un rôle important, d'autre
part l'étude des matériaux très finement divisés où le quantité d'eau adsorbée n'est pas négligeable.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 11
A l'interface entre deux fluides non-miscibles, les molécules possèdent une énergie différente de celles
qu'elles ont "en masse". Ceci est traduit par la formation d'un ménisque (surface courbe), délimitant
deux fluides aux pressions P1et P2. Un exemple simple est celui d’une inclusion sphérique, de rayon r,
du fluide (1) dans le fluide (2). Supposons que les 2 fluides occupent un volume total imposé V=V1+V2 à
une température imposée T=T1=T2. A l’équilibre, le potentiel thermodynamique du système total (2
phases + 1 interface) est minimum :
02211 =+−− dAdVPdVP σ (1.6)
L’inclusion (1) occupe un volume
31 3
4 rV π= (1.7)
d’où
rdrdAdrrdVrA πππ 8 ,4dVet 4 221
2 ==−== (1.8)
L’équation précédente s’écrit :
rPP σ2
21 =− (1.9)
C’est l’équation de Laplace. On observe qu’à l’équilibre les deux pressions P1 et P2 sont égales à la
limite r->infini (interfaces planes). L’équation (1.12) peut être généralisée à des surfaces courbes non
sphériques en remplaçant r par le rayon de courbure moyen rm :
+=
21
11211
rrrm
(1.10)
où r1 et r2 sont les 2 rayons principaux de courbures au point considéré. L’effet des forces de gravité a
été négligé dans les calculs précédents.
Lorsque deux fluides différents, ou un liquide et un gaz, ou deux liquides sont en contact avec une
surface solide, la configuration d’équilibre dépend des valeurs relatives des tensions de surface entre
les 3 phases. Nous définissons l’angle de contact α entre la surface du liquide et la surface plane du
solide. L’équilibre mécanique se traduit en projection sur le plan solide par l’équation de Young.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 12
slsg σσασ −=coslg (1.11)
Lorsqu’un fluide tend à s’étaler sur toute l’interface aux dépens du second fluide, le premier est appelé
"mouillant" et l’autre "non mouillant". Au niveau microscopique, la mouillabilité résulte des interactions
moléculaires entre fluide et solide. Le fluide mouillant est celui que le solide préfère car les interactions,
dans ce cas, minimisent davantage l’énergie totale.
La pression capillaire est la différence de pression à travers une surface séparant deux fluides non
miscibles (à l’intérieur d’un capillaire). C’est un paramètre qui dépend de la structure du capillaire, ou
plus généralement de la structure des pores. Si l’on considère l’exemple simple d’un tube capillaire de
rayon R relié à un réservoir contenant un liquide mouillant surmonté d’un gaz, la pression à l’intérieur du
liquide est inférieure à celle de la phase gazeuse (Figure 1.2). Négligeant les effets de gravité sur
l’interface, nous admettons que le rayon de courbure rm est constant et égal à R/cos α.. Le α.est l'angle
de mouillage selon lequel l'interface se raccorde à la paroi solide. Il dépend de la nature du fluide et
celle de la paroi. L’équation de Laplace conduit à
RrPPP
moc
ασσ cos221 ==−= (1.12)
où Pc est la pression capillaire, Po la pression du gaz (l’air ici) au voisinage du ménisque, et P1 la
pression de liquide (l’eau ici) près de l’interface. Par ailleurs Po - P1 = ∆ρgh où ∆ρ. est la différence de
masse volumique entre air et eau. Cet exemple montre bien les conséquences macroscopiques des
interactions moléculaires entre solide, liquide et air : les interactions moléculaires déterminent α, ce qui
ensuite détermine rm et Po - P1, puis par voie de conséquence, l’ascension capillaire h.
Fig.1.2. L'Ascension capillaire d'un liquide mouillante

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 13
1.4 Transport d’eau en milieu poreux
1.4.1 Echelle microscopique – pores
Une approche schématique de milieu poreux consiste à le modéliser comme un ensemble de pores aux
formes géométriques simples pour lesquels on dispose des équations de mouvement de fluides.
1.4.1.1 Loi de Poiseuille L’équilibre des forces, auquel correspond un profil de vitesse constant dans le temps, s’exprime pour le
cylindre de longueur L et de rayon r par l’égalité entre la force motrice et les frottements. Dans le cas
d’un écoulement horizontal, le gradient de pression ∆p multiplié par sa surface d’action est alors égal au
produit de la contrainte tangentielle τ par la surface latérale du cylindre. c’est-à-dire (avec z=r):
dzd ou d' rL2rp 2 υητπτπ∆ == (1.13)
La distribution de vitesse est parabolique:
( ) ( )22
4zR
Lpzv −
−=
η∆
et L
pRvη4
2
max∆−
= (1.14)
Le débit Q correspondant, soit le volume traversant une section par unité de temps, est donné par le
volume du paraboloïde de révolution des vitesses, soit le produit de sa base par sa demi hauteur:
( )L
pRvRQ ∆η
ππ −==
821 4
max2 (1.15)
Cette expression, la loi de Poiseuille, indique que le débit est proportionnel à la quatrième puissance du
rayon et à la perte de charge de pression par unité de longueur. Finalement, la vitesse moyenne du
fluide dans un tube capillaire s’exprime de la manière suivante, où a est un coefficient variant selon la
géométrie de la section du tube et valant R2/8 dans le cas où cette dernière est circulaire:
( ) ( )Lpa
LPR
RQ
SQv
η∆
η∆
π−
=−
===8
2
2
_ (1.16)
Cette relation ne reste valable que si l’écoulement est laminaire, c’est-à-dire pour des vitesses

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 14
relativement faibles et dans des tubes étroits, conditions que remplissent généralement les processus
de transferts de la phase liquide d’un sol.
1.4.1.2 Imbibition et drainage La préférence du solide pour un fluide, ou mouillabilité préférentielle, a pour conséquence le
déplacement du fluide non mouillant par le fluide mouillant, sans qu’une pression extérieure soit
appliquée. Intéressons nous à un capillaire de rayon R, mouillé par l’eau, mais initialement rempli d’air.
Lorsque le tube est mis au contact d’un réservoir d’eau à la pression atmosphérique, l’interface
initialement plane est déformée par les forces de tension superficielle, et l’angle de l’interface atteint une
valeur d’équilibre α. L’équation de Laplace entraîne que la pression à l’intérieur de l’eau, près de
l’interface, est inférieure à la pression atmosphérique de Pc=2σcosα/R. Il existe donc une diminution de
pression entre les points d’entrée de l’eau (x=0) et l’interface (x>0). Le gradient de pression
correspondant fait pénétrer l’eau à l’intérieur du capillaire. Lorsque l’eau pénètre le gradient
xP
dxdP c≅ (1.17)
décroît car x croît, et l’écoulement diminue avec le temps. La vitesse moyenne d’écoulement, est
donnée par la loi de Poiseuille
η8
2_ RdxdP
dtdxv == (1.18)
où η est la viscosité. D’où
ηασ
xRv
4cos_
= (1.19)
La vitesse est proportionnelle à R: les gros capillaires se remplissent plus vite que les petits. Par
intégration, 1.28 conduit à :
t2costRx2
ηασ
= (1.20)
La position du ménisque croît √t et √R. Ainsi, si l’on a une distribution de capillaires de rayons différents,
l’eau ne pénètre pas à la même vitesse dans tous. La progression de l’eau n’est pas due à un gradient

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 15
de pression extérieure mais a la mouillabilité préférentielle.
Dans la plupart des cas, la porosité d’un milieu est faite d’un réseau multiconnecté de pores et
d’étranglements de dimensions variables. Il est par suite difficile de décrire l’évolution des interfaces
dans chacun des capillaires. La pression capillaire est intimement reliée à la présence d’une surface
solide et, en particulier, à la forme et à la dimension des capillaires. En toute rigueur on ne peut donc
parler que de pression capillaire à travers une interface particulière du milieu et non de pression
capillaire du milieu. A l’équilibre cependant, si les forces de gravité peuvent être négligées, la pression
peut être uniforme à l’intérieur des deux phases fluides et il est raisonnable dans ces conditions de
parler de pression capillaire du milieu. Examinons l’exemple d’une roche mouillée par l’eau, totalement
saturée d’eau, et placée en contact avec un réservoir d’huile. Les forces de capillarité empêchent l’huile
de déplacer spontanément l’eau. Lorsque la pression d’huile augmente de ∆P une certaine quantité
d’huile pénètre dans la roche et déplace l’eau des gros pores accessibles, connectés au réservoir par
des rayons supérieurs à une valeur R1. La fraction du volume de pores occupés par l’huile, ou
saturation en huile est définie par
eh SS −=== 1pores de volumehuiled' volume huileen saturation (1.21)
Se est la saturation en eau. On admet ici que huile et eau sont les seules phases fluides et l’espace
poreux est totalement saturé. L’huile est retenue dans la roche par une membrane semi-perméable qui
laisse l’eau sortir. En répétant le processus, après n incréments de pression ∆P et obtention de
l'équilibre, la saturation en huile est directement obtenue par la mesure du volume d’huile injecté, On
obtient ainsi une relation en la pression d’huile Ph et la saturation en huile Sh, La courbe correspondante
est la courbe de drainage.
Si le processus est inversé et que l’on impose une décroissance lente de la pression d’huile, l’eau rentre
à nouveau dans la roche à travers la membrane semi-perméable. Une relation, différente de la
précédente, est obtenue entre Ph et Sh (courbes d’imbibition-drainage).
1.4.1.3 Phénomène d’hystérése La relation entre potentiel de pression matricielle et teneur en eau n’est pas univoque. Les courbes
déterminées par drainage, ou désorption, diffèrent en effet de celles déterminées par imbibition, ou
sorption. Ce phénomène, dit d’hystérèse, est du à plusieurs facteurs concurrents, mais les principaux
facteurs auxquels est attribué le phénomène sont la présence d’air piégé, l’angle de contact et la non
uniformité géométrique des pores.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 16
L’angle de contact varie en effet selon la direction dans laquelle le ménisque se déplace. Lorsque ce
dernier avance, l’angle de contact et par conséquent le rayon de courbure sont plus grands que lorsqu’il
recule. Ainsi, pour une même teneur en eau, la succion matricielle est plus forte en désorption qu’en
sorption.
L’effet de la distribution irrégulière de la taille des pores, qui sont généralement des vides de forme
variable interconnectés par des passages plus petits, offre un éclairage particulièrement intéressant à la
question, par l’effet "bouteille d’encre" qui en résulte.
Un pore hypothétique est constitué d’un vide relativement grand de rayon R, limité par des canaux plus
étroits de rayon r. Si ce pore est initialement saturé et que le potentiel de pression diminue, il ne se
vidangera (brutalement) que lorsque ce dernier sera devenu inférieur au seuil défini par
rPr
σ2= (1.22)
Pour que l’eau l’envahisse à nouveau, le potentiel de pression doit augmenter jusqu’à la valeur de
PR=2σ/R. le remplissage est également brutal. Il apparaît ainsi que la désorption dépend des rayons
étroits des canaux de connexion, tandis que la sorption dépend des diamètres maximaux des grands
pores. Ces sauts discontinus dans le comportement de la phase liquide, peuvent être facilement
observés dans les sables grossiers. En général, l’effet d’hystérèse est plus prononcé dans les milieu à
structure grossière et pour de faibles succions matricielles. Dans ces conditions en effet, le potentiel de
pression est nettement inférieur lorsque les pores se vident que lorsqu’ils se remplissent.
1.4.1.4 Modèles de Simulation
1.4.1.4.1 Faisceau des tubes capillaires
L’approche la plus simple consiste à représenter le milieu poreux par un ensemble de tubes
cylindriques parallèles. La distribution de taille des tubes est donnée soit par des distributions
théoriques possibles, soit par l’analyse de la répartition de deux fluides non miscibles en présence dans
le milieu en fonction de la loi de Laplace. Pour cet ensemble de tubes et une pression capillaire h
donnée, un fluide non mouillant tel que le mercure ou l’air en présence d’eau occupe tous les pores de
taille supérieures à la valeur r=f(h) donnée par la loi de Laplace et le fluide mouillant les pores restants.
On peut ainsi déterminer un faisceau de capillaires "équivalents" à la réalité au sens où il permet de
reproduire une courbe pression/teneur en fluide h(θ) expérimentale.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 17
En milieu saturé, on calcule alors le flux dans chaque pore, proportionnel à la différence de pression ∆P
appliquée aux extrémités du tube (loi de Poiseuille) et le flux total obtenu par sommation, et donc
encore proportionnel à ∆P, comme le prévoit la loi de Darcy pour un milieu poreux réel; on en déduit la
perméabilité de l’ensemble du milieux poreux modélisé. En milieu non saturé, on détermine la
perméabilité relative à un fluide en sommant les flux sur l’ensemble des pores remplis par ce fluide. La
perméabilité ainsi calculée est surestimée, on cherche alors à représenter les pores dans un milieu réel.
Les sommations discrètes effectuées s’expriment sous une forme continue lorsque la distribution de
taille des pores est décrite par une fonction de densité de distribution f(R) (densité volumique des pores
en fonction de leur taille). Cette fonction peut être définie par:
( ) ( )∫=
pleinspores
drrfhθ (1.23)
La perméabilité se calcule alors, toujours à partir de la loi de Poiseuille (section §1.4.1.1):
( ) ( ) ( )∫=
pleinspores
drrfrThK 2θ (1.24)
et en pondérant par un facteur de tortuosité T(θ). Si l’on dispose d’une expression analytique pour θ(h),
on peut en déduire l’expression analytique de K(θ).
La perméabilité du milieu poreux est donc calculée à partir d’une forme intégrale des équations de
mouvement pour chaque pore et d’une deuxième intégration effectuée sur l’ensemble des pores.
Du fait de sa simplicité extrême, un modèle de tubes cylindriques parallèles ne peut rendre compte
entièrement du comportement hydrique d’un milieu poreux. En particulier, le modèle ne permet pas de
représenter l’hystérèsis bien connue de la relation h(θ), puisque cette relation est calculée de façon
univoque à partir de la distribution du volume des pores fonction de leur taille. Ce modelé ne permet pas
non plus de rendre compte des phénomènes de piégeage (lorsque la saturation en eau n’atteint pas les
valeurs extrêmes de 0% ou 100% de la porosité totale). Il conduit aussi à une surestimation de la
conductivité a saturation, a moins d’introduire des coefficients de pondérations empiriques.
Les premières extensions du faisceau de tubes capillaires sont l’introduction locale, au niveau d’un
pore, d’irrégularités expliquant le piégeage e/ou l'hystérésis. Un certain nombre de travaux concernent
l’amélioration du motif de base du modèle capillaire, en modifiant la géométrie des parois du tube
cylindrique initial, qui peuvent devenir rugueuses, sinusoïdales, alternativement divergentes et
convergentes ou présentant des constrictions périodiques. La géométrie de ces capillaires reste assez
régulière pour pouvoir résoudre les équations de Navier-Stokes pour des écoulements diphasiques et
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 18
permettent, par une utilisation fine de la loi de Laplace donnant la position des interfaces entre deux
fluides, d’expliquer les phénomènes d'hystérèsis, ou de piégeage dans les aspérités des parois [Danis
et Quintard, 1984].
1.4.1.4.2 Réseaux de pores
Dans le sens d’une complexité croissante et aussi d’une meilleure représentation des phénomènes, on
est alors amené à imaginer l’espace poral comme un assemblage de pores en réseaux (réseaux
simples de liens). Ces réseaux sont des maillages réguliers de l’espace bi ou tridimensionnel de
topologie variées. Chaque lien du réseau représente un pore élémentaire défini par un rayon équivalent
et un volume. Il s’agit souvent d’un tube cylindrique, dont le volume définit une longueur variable (qui
n’est pas celle du lien servant à représenter le pore). On représente généralement l’invasion d’un fluide
sur un domaine carré, progressant d’une face choisie comme "face aval" vers la face "amont" opposée,
en supposant les deux autres faces fermées. Dans certains cas simplifiés, on peut encore raisonner en
termes probabilistes.
Fatt [Fatt, 1956] est le pionnier en matière de simulation de réseaux de pores. Il travaille sur des
réseaux bidimensionnels sur lesquels il simule l’invasion par un fluide non mouillant. Il étudie différentes
distributions théoriques de tailles de pores et différents types de réseaux. Il montre que plus la
coordinance du réseau augmente (plus le nombre de liens se rencontrant en un même nœud est élevé),
plus les résultats se rapprochent de ceux obtenus avec un faisceau de tubes parallèles. Pour calculer la
perméabilité, il met en pratique l’analogie entre réseaux de tubes conducteurs de fluide et réseaux de
résistances électriques, en construisant réellement des réseaux électriques avec des éléments
conducteurs de résistance variable. Pour simuler un milieu poreux se désaturant en fluide mouillant, il
enlève au fur et à mesure les plus faibles résistances et les replace dans un deuxième réseau
représentant I’emplacement du fluide non mouillant; il mesure à chaque étape la résistance équivalente
des deux réseaux, et en déduit la forme des deux courbes de perméabilité relative.
Wise [Wise, 1991], s’appuyant sur les travaux de Fatt, simule un réseau cubique dont les liens
représentent des tubes capillaires cylindriques (de largeurs et longueurs proportionnels l~r). La
distribution de tailles de pores est déterminée à partir de courbes de rétention en drainage. Rise
s’intéresse à la valeur de la perméabilité à saturation calculée numériquement par analogie électrique. Il
montre que les résultats dépendent de la répartition spatiale des pores sur le réseau.
1.4.1.4.3 Théorie de la percolation
La théorie de la percolation [Essan, 1980; Stauffer, 1985] permet de décrire des phénomènes de
transport sur un ensemble d’objets dont les interconnexions peuvent être représentées par Ieurs
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 19
positions relatives sur les liens ou les nœuds d’un réseau [Parlar, 1988; Chattzis, 1982; Hoshen, 1976;
Franc, 1988]. Suivant la proportion d’objets "actifs" et "inactifs", c’est-à-dire permettant ou non le
transport localement, et à condition qu’ils soient répartis aléatoirement sur le réseau, on peut établir des
lois théoriques et très générales pour le comportement global d’un réseau infini. On distingue la
percolation de sites lorsque les éléments actifs et inactifs sont répartis sur les nœuds d’un réseau et la
percolation de liens lorsqu’ils sont répartis sur les liens d’un réseau.
Pour une faible proportion p d’éléments actifs on peut seulement constater que la plupart d’entre eux se
regroupent en paquets ou amas finis. On montre qu’il existe une proportion critique pc, un seuil de
percolation, à partir duquel apparaît un amas infini qui permet statistiquement le transport entre deux
points très éloignés du réseau.
En milieu saturé, on peut modéliser ainsi une roche mal connectée et saturée d’eau par un réseau dont
chaque lien représente une fissure ou l’absence de fissure: au delà d’une certaine densité de fissures le
milieu est conducteur. On modélise de la même façon un milieu poreux très bien connecté mais non
saturé. Lorsque deux fluides non miscibles sont en présence et qu’on les suppose répartis en tout ou
rien dans chaque pore dans un réseau de liens capillaires simple, les liens actifs pour le transport du
fluide X sont les pores remplis par ce fluide. La perméabilité relative au fluide X est nulle en deçà du
seuil de percolation qui dépend de la coordinance du réseau (nombre de liens se rencontrant en
chaque nœud) et de la dimension euclidienne.
On a vu que l’on modélisait souvent la pénétration d’un fluide sur un réseau en imposant un chemin
continu d’alimentation à partir de la face d’injection (ou des faces ou points d’injection). Lorsque cette
condition est imposée sur un réseau de percolation, on parle alors de "percolation d’invasion"
[Lenormand, 1985; Chatzis et Dullien, 1982]. Dans ce cas, la pénétration du fluide ne se fait que dans
les pores connectés à la source d’alimentation: en dessous du seuil de percolation, il s’agit d’amas finis
dont la teneur θ en fluide peut être considérée comme nulle si l’on se rapporte à un réseau infini. Le
seuil de percolation est caractérisé par l’apparition d’un amas infini dont la structure est fractale, tout
comme dans un réseau de percolation simple, et par une transition abrupte entre une teneur en fluide
quasi nulle et une valeur proche de la saturation. La courbe h(θ) traduit cette forte variation de teneur en
eau pour une faible variation de pression capillaire d’une façon jugée très proche des courbes
observées sur certains milieux poreux.
Les réseaux de sites et de liens ont été utilisés notemmant par [Diaz, 1987; et Kantzas, 1988]; le
modèle est repris par [Daian et Saliba, 1991]. Les pores sont distribués à la fois sur les sites et les liens
d’un réseau cubique. Le lien qui relie deux sites est choisi de diamètre toujours plus fin que ceux des
sites l’entourant (on parle de sites et liens corrélés); les liens représentent les constrictions de l’espace
poreux et les sites les élargissements des pores.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 20
On se donne d’abord une distribution du nombre de sites en fonction de leur taille, pour N classes de
tailles de sites numérotées de 0 à N par ordre décroissant de taille. Les liens sont répartis dans ces
classes: ils sont affectés à la classe du plus petit site adjacent. L’invasion d’un fluide est décrite en
termes de percolation de sites (du point de vue de la progression du fluide, les liens sont ignorés). En
imbibition, les sites les plus fins sont envahis les premiers, et les liens sont seulement automatiquement
envahis dès que leurs sites adjacents sont envahis. En drainage, les sites les plus gros (les premières
classes de taille) sont envahissables, mais ils ne sont effectivement envahis que s’il existe un chemin
continu de sites depuis la face d’alimentation, et aussi si les liens de la même classe sont
envahissables, deux conditions sources d'hystérèsis. On simule ainsi un schéma de type percolation
d’invasion pour le fluide non mouillant et de type percolation simple pour le fluide mouillant.
Pour déterminer h(θ), il faut connaître le volume représenté par chaque pore: les fonctions de densité
volumique des distributions de liens et de nœuds en fonction du diamètre sont déterminées par
ajustement sur les données expérimentales. Afin de représenter de larges distributions de pores et des
pourcentages de volumes non négligeables pour les pores les plus fins, [Daian et Saliba, 1991] sont
conduits à identifier proportions en nombre et proportion en volume (chaque site et chaque lien
représente un faisceau de cylindres parallèles d’autant plus nombreux que leur diamètre est petit).
La perméabilité en milieu non saturé relative à un fluide donné est alors calculée par analogie
électrique. La conductance de chaque site est soit négligée (Kantzas), soit répartie sur Ies six liens
adjacents (Daian et Saliba), de façon à se ramener à l’étude d’un réseau de liens conducteurs. Pour le
calcul de la perméabilité relative au fluide non mouillant, la présence de pores non conducteurs car
vides pose un problème algorithmique: on leur assigne donc une conductance très faible (Kantzas). Par
contre les pores sont supposés toujours conducteurs en fluide mouillant pour des raisons physiques:
pour Kantzas, les pores contiennent toujours une faible quantité de fluide mouillant retenu dans les
aspérités des parois des pores (en quantité mal connue); pour Daian, ils contiennent de la vapeur
(d’eau) dont la diffusion est assimilée en pratique à une conduction. La comparaison avec des données
expérimentales s’avère dans tous les cas satisfaisante en drainage, et mauvaise en imbibition.
Dullien [Dullien, 1991] conclut qu’il n’y a pas actuellement un modèle "garanti", mais qu’il est conseillé
de travailler sur des réseaux tridimensionnels et qu’il est nécessaire de déterminer par visualisation
différentes propriétés structurales (parmi lesquelles la coordinance "réelle" moyenne, les distributions
de taille respective des élargissements et rétrécissements de pores, et l’identification des réseaux
secondaires dans les milieux à plusieurs niveaux de porosité). C’est ce que lui-même recherche en
analysant des séries de sections rapprochées et parallèles; il signale aussi la possibilité d’utiliser des
méthodes optiques de mesures de densités par analyse d’images.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 21
1.4.1.4.4 Distribution des éléments solides
Plusieurs auteurs recherchent aIors un modèle qui puisse associer un ensemble de pores à un
ensemble de particules donné, de façon à pouvoir utiliser un modèle capillaire pour déterminer ses
caractéristiques hydriques. Le milieu est défini par ses éléments solides, mais sans tenir compte de leur
répartition spatiale. Ceci signifie que l’ensemble de pores associé aux éléments solides est défini par
une simple distribution de tailles de pores. L’objectif est simple et ambitieux: une simple granulométrie
permettrait de déterminer les caractéristiques hydriques du sol.
Arya et Bernard [Arya et Bernard, 1991] proposent une méthode pour obtenir h(θ) à partir d’une
distribution de taille de particules en N classes. Le principe employé pour déduire une distribution de
taille de pores est le suivant: on considère que plus les particules sont fines, plus leur empilement
ménage des vides étroits. A chacune des N classes de taille de particules, on associe un pore (N pores
au total). La classe de taille Ri est supposée contenir des particules sphériques de diamètre Ri dont on
peut donc déterminer le nombre Ni. Le pore cylindrique associé est supposé "suivre le bord" des
particules juxtaposées et sa longueur est li=NiRiα (α est égal à 1 pour un pore rectiligne et c’est un
paramètre à estimer pour une géométrie naturelle). Reste à trouver le diamètre ri de ce pore: supposant
que la porosité ε est le même pour chaque classe et égal à celui de l’échantillon tout entier, le calcul se
fait aussitôt:
( )2
1
132
−
−
=αε i
ii NRr (1.25)
Le modèle capillaire utilisé est donc un ensemble de N tubes capillaires indépendants, qui permet de
calculer N couples de valeurs (h,θ). Le paramètre alpha est déterminé par calage sur les données
expérimentales en comparant les courbes h(θ) obtenues par ajustement d'une expression analytique,
sur les données calculées et observées.
1.4.2 Echelle macroscopique
Nous avons à passer de l’échelle microscopique, où les lois physiques fondamentales s’appliquent mais
les variables sont inaccessible à la mesure, à l’échelle macroscopique, où les phénomènes sont
observés. Mais les équations qui gouvernent l’évolution des grandeurs macroscopiques ne sont pas
nécessairement de même forme que les équations s’appliquant au niveau microscopique. Le passage
d’une échelle à l’autre exige certaines considérations qui constituent elles mêmes un grand domaine de
recherche. Différents méthodes et outils. dont l’homogénéisation, la prise de moyenne, la percolation et
les fractals sont des exemples, sont utilisés pour prévoir les propriétés macroscopiques du transport à

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 22
partir d’informations sur la microstructure du milieu.
1.4.2.1 La loi de Darcy
En 1856, G. H. Ph. Darcy observa expérimentalement et déduisit une relation exprimant le débit total Q
transitant au travers de la colonne comme le produit de la section S, du rapport de la différence de
charge totale ∆H existant entre ses extrémités à sa longueur L et d’un coefficient de proportionnalité Ks
[ ]smLHSKQ s / 3∆
= (1.26)
La différence de charge totale représente une somme algébrique des potentiels partiels
pmg ΦΦΦΦ ++= (1.27)
Ou Φg est le potentiel gravitaire, Φm est le potentiel matriciel (potentiel d'adsorption et potentiel
capillaire) et Φp le potentiel de pression (dû à la pression du gaz extérieur). La phase gazeuse étant ici
considérée comme étant à pression uniforme et égale à la pression atmosphérique, seuls les deux
premiers termes seront retenus.
Le potentiel total est alors généralement décrit par la charge de pression capillaire h et la charge de
gravité z:
zhH +==Φ (1.28)
Par définition, la vitesse fictive d’écoulement s’exprime par le rapport du débit total de la section de la
colonne, soit sous la forme d’une densité de flux ou flux par unité de surface q:
[ ]smLHK
SQq s / ∆
== (1.29)
Dans ces deux formulations de la loi de Darcy, l’ensemble des forces de frottement s’exprime de
manière explicite par le coefficient de proportionnalité Ks.
Lorsque la force motrice de l’écoulement est exprimée en termes de charge, soit par ∆H/L, ce
coefficient prend la dimension d’une vitesse et s’exprime en m/s, d’où les termes de vitesse de filtration

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 23
à saturation par unité de pente, par unité de charge ou encore par unité de perte de charge. Par contre,
si le potentiel total est exprimé comme une énergie, non plus par unité de poids, mais par unité de
volume, le facteur de proportionnalité entre le flux et la force motrice ne correspond plus, dans sa
dimension, à une vitesse. C’est pour cette raison notamment qu’il est recommandé de renoncer au
concept de vitesse de filtration et de ne retenir que le terme de conductivité hydraulique à saturation
pour désigner le coefficient de proportionnalité Ks.
1.4.2.2 Modèles de Simulation
1.4.2.2.1 Volume élémentaire représentatif - V.E.R.
La définition d’un milieu équivalent au milieu étudié et de l’échelle d’applicabilité du modèle
macroscopique est un problème délicat, longuement discuté par [Bachmat & Bear, 1984; Whitaker,
1969; 1986; Baveye & Sposito, 1984] parmi d'autres.
La structure géométrique du milieu, c’est à dire des propriétés telles que la porosité ou la distribution
des dimensions de pores, peut être décrite statistiquement à grande échelle s’il est possible de définir
une dimension ro telle que la moyenne des caractéristiques étudiées prise dans une sphère de rayon au
moins égal à ro, soit indépendante de la position de son centre, ro est la taille de l’élément de volume
représentatif (V.E.R.). L’existence d’un V.E.R. n’est pas incompatible avec une variation spatiale des
propriétés du matériau. Toutefois, l’ordre de grandeur des distances lo, sur lesquelles la variation des
propriétés se manifestent de façon appréciable doit être grande par rapport à la taille de le V.E.R. :
oo rl >> (1.30)
Dans ce cas, il est possible de traiter la structure solide comme un milieu continu et de définir le champ
d’une propriété structurale donnée, en affectant au centre d’un V.E.R. la moyenne de la quantité
étudiée, calculée sur ce volume.
Lorsque dans une structure poreuse donnée a lieu un phénomène tel qu’un transport de fluide(s) ou la
conduction thermique, le phénomène peut être décrit par la variation spatio-temporelle de variables
telles que la pression ou la température. La structure poreuse, considérée à l’échelle microscopique,
détermine le processus en lui imposant des conditions aux limites. Pour remplacer ce processus par un
équivalent macroscopique, et définir un champ macroscopique des variables considérées, il est
nécessaire de prendre une moyenne de ces variables dans un domaine spatial tel que cette moyenne
soit représentative. A chacune de ces variables i est donc associée une taille d’élément de volume
représentatif et une échelle de variation macroscopique propre au processus de transport. Le passage

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 24
au macroscopique n’a de sens que si en tout point et à tout instant, toutes les variables satisfont la
condition de séparation des échelles :
ii rl >> (1.31)
De plus, la moyenne des variables dans la description macroscopique du processus sera à prendre sur
le plus grand des V.E.R. relatifs à chacune des variables en jeu. La macroscopisation sera possible si la
séparation des échelles est globalement satisfaite dans le processus :
( ) ( )ii rl maxmin >> (1.32)
Les phénomènes qui répondent à cette condition sont dits quasi-statiques, ou régis par la règle de
l’équilibre local. Il est possible de définir dans ce cas un E.V.R. phénoménologique dans lequel toutes
les variables sont quasi uniformes et à l’intérieur du quel les phénomènes de transport sont quasi
statiques. Ces phénomènes se prétent à la macroscopisation et autorisent notamment la transposition à
l’échelle macroscopique des lois en jeu à l’échelle microscopique, en général sans changement de la
forme de la loi. Ainsi, la loi de Darcy peut être considérée comme la transposition à l’échelle
macroscopique, valable pour les transports quasi statiques de fluides, des lois du type Poiseuille en jeu
à l’échelle des pores.
Certains phénomènes échappent à ce type de macroscopisation, notamment ceux qui sont tels que la
variation des grandeurs descriptives à l’intérieur des V.E.R. structuraux n’est pas négligeable ( li<ro pour
une des variables en jeu). L’apparition de tels processus dépend à la fois de la nature des lois qui les
gouvernent et de l’hétérogénéité interne au V.E.R. du milieu dans lequel ils ont lieu. On peut citer
comme exemple le cas de l’invasion par capillarité d’un poreux présentant une structure fissurée. ou
une large distribution de dimensions de pores favorisant l’apparition de chemins privilégiés d’invasion
[Saliba, 1990; Daian & Saliba, 1991]. Bien que les lois du type Poiseuille ne soient pas remises en
cause à l’échelle des pores, la loi de Darcy apparaît dans ce cas inadéquate pour décrire le phénomène
à l’échelle macroscopique, pour la simple raison que la moyenne de la pression dans le V.E.R.
structural ne peut être valablement définie. Les concepts découlant de la loi de Darcy, tels que la
diffusivité hydrique, se trouvent alors également en défaut. Il est très difficile, et en certains cas
impossible, d’identifier expérimentalement la dimension caractéristique du V.E.R. structural.
1.4.2.2.2 Equations de Navier Stokes
A cette échelle, le milieu poreux est défini comme un milieu continu et la perméabilité se mesure. A une
échelle plus fine, où la distinction est faite entre les phases solide et vide, on peut essayer de la calculer
à partir de la géométrie de l’espace poral.

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 25
Dans un milieu fluide continu représenté par des champs de vitesses et de pressions ponctuelles, les
mouvements du fluide sont régis par les équations différentielles de Navier-Stokes. Dans des cas très
simples, on sait intégrer ces équations (par exemple, [Ganoulis, 1989]); on sait déterminer en particulier
le flux d’eau traversant une fracture ou un tube lorsqu’un gradient de pression est appliqué entre
chaque extrémité (loi de Poiseuille). Dans le cas d’un milieu poreux naturel comme le sol, l’intégration
mathématique des équations de Navier-Stokes est particulièrement difficile, car les solides sont des
obstacles à l’écoulement des fluides qui fournissent des conditions aux limites très complexes.
Il existe cependant un certain nombre de voies de résolution, en termes analytiques ou probabilistes. La
recherche de méthodes approchées d’intégration d’équations différentielles mettant en jeu des variables
théoriques ponctuelles pour en déduire des relations entre des variables macroscopiques moyennes
mesurables est l’objet de recherches approfondies de la part de physiciens et mathématiciens des
milieux poreux.
Les valeurs macroscopiques moyennes <x> peuvent être définies par intégration volumique des
variables ponctuelles x sur un volume V élémentaire de milieu poreux ("prise de moyenne volumique",
[Whitaker, 1986]). Un deuxième type d’approche consiste à définir la géométrie du milieu poreux
comme la réalisation d’une fonction aléatoire (ergodique et stationnaire), une fonction de porosité
ponctuelle égale en 0 dans les grains et à 1 dans les pores, dont la covariance exprime la structure
spatiale. Les valeurs moyennes (celle de la porosité ou celle d’une propriété quelconque du milieu
poreux) sont alors égales à des espérances mathématiques de fonctions aléatoires.
Dans les deux cas, on peut effectuer un transfert d’échelle en déduisant des équations différentielles
microscopiques la forme et les coefficients d’équations différentielles macroscopiques. C’est ainsi que
l’on peut montrer dans quelles conditions la loi de Darcy découle de l’intégration de Navier-Stokes, en
introduisant le coefficient de perméabilité qui relie la vitesse moyenne et le gradient de pression
moyenne [Whitaker, 1986].
On montre que la perméabilité est une grandeur intégrant les caractéristiques géométriques de l’espace
poral. Sa détermination précise par prise de moyenne volumique fait l’objet de procédures complexes
de "fermeture des équations" et n’est possible de façon analytique que sur des assemblages
périodiques d’éléments géométriques très simples. Il est aussi possible de générer des milieux poreux
numériques de géométrie plus complexe, en simulant des réalisations d’une fonction porosité aléatoire
dont les caractéristiques géométriques sont statistiquement équivalentes à celles mesurées sur des
images binaires de sections de milieux poreux isotropes [Adler, 1990]. Les équations différentielles de
mouvement du fluide sont alors résolues numériquement sur le milieu simulé, sous l’hypothèse de
périodicité spatiale, et le tenseur de perméabilité en deux ou trois dimensions est déterminé par des
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 26
méthodes de différences finies, éléments finis ou volumes finis. L’importance du type de structuration et
des modifications de la géométrie microscopique du milieu poreux peuvent être alors finement
analysées, mais les calculs sont extrêmement lourds.
1.4.2.2.3 Simulation "Gaz sur Réseaux"
Pour représenter le système dynamique formé par un fluide en mouvement, l’espace, le temps sont
discrétisés, mais aussi le fluide lui-même, et le système représenté par un ensemble de "particules"
évoluant à chaque instant sur un réseau [Frisch, 1987]. Des règles de collision entre particules sont
établies de façon à respecter des principes physiques élémentaires tels que la conservation de masse
et de la quantité de mouvement. Pour respecter l’isotropie des flux, le choix d’un réseau hexagonal est
communément accepté en deux dimensions. Des extensions un peu plus complexes existent en trois
dimensions. Il se trouve que la simulation de règles très simples établies à ce niveau que l’on peut
qualifier de pré-microscopique permet de retrouver les équations de Navier-Stokes.
Dès lors il est possible d’introduire de nouvelles règles telles que des règles de choc contre une paroi
solide et de simuler la circulation d’un fluide dans un milieu poreux à géométrie quelconque. Pour un
nombre de particules suffisant, on peut ainsi simuler l’apparition de la loi de Darcy, en simulant une
différence de pression par l’injection de particules sur une face du réseau. Pour représenter un milieu
non saturé, on utilise deux "couleurs" de particules. Pour deux fluides non miscibles, on donne un poids
plus élevé aux règles de collision qui favorisent le regroupement des particules de même couleur, ce qui
permet de faire apparaître l’équivalent de la tension superficielle aux interfaces entre différentes phases
prévue par la loi de Laplace. D’autres processus physiques sont reproduits de façon analogue.
Cette méthode fournit un exemple fondamental du passage de comportements microscopiques simples
à un fonctionnement macroscopique dont la complexité rejoint celle observée dans le monde réel. Elle
donne de l’espoir dans le principe même de toute recherche d’un monde simulé composé d’objets
élémentaires au comportement simple dont la cohabitation en grand nombre résulterait en l’émergence
d’un comportement macroscopique reproduisant les phénomènes réels.
1.5 Caractérisation hydrique - Les sols
1.5.1 Dynamique en milieu saturé
La description des processus de transferts dans un milieu poreux tel que le sol est rendue
particulièrement ardue par la complexité même du système poral dans lequel ils se déroulent [Perrier,
1994]. Les trajectoires d’écoulement d’un fluide quelconque circulant au sein de ce milieu empruntent
une série de micro-cavernes, reliées entre elles par d’étroits canaux. L’irrégularité des sections de
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 27
cheminement confère ainsi à la mécanique des fluides dans les milieux poreux un caractère bien
particulier. On se trouve en effet confronté à deux types d’approches du phénomène. D’une part une
approche microscopique qui repose sur l’étude de la dynamique des écoulements dans des micro-
conduits, les tubes capillaires, et de l’autre une approche macroscopique, qui repose sur l’étude
quantitative globale du phénomène de transfert dans un milieu poreux.
1.5.1.1 Approche microscopique A l’échelle microscopique, les transferts d’eau dans le sol s’effectuent dans le réseau de micro-cavités
reliées par de fins canalicules que forme son système poral. Une relation entre force motrice. forces de
frottement et vitesse d’écoulement peut être établie aisément dans le cas d’un écoulement laminaire
dans un conduit de géométrie fixe.
L’équation de Poiseuille (section §1.4.1.1) décrit l’écoulement de l’eau dans un tube capillaire à
géométrie fixe. Si l’on considère le sol comme un faisceau de tubes rectilignes de diamètre constant sur
toute leur longueur, le débit total de l’eau qui transite dans ce milieu peut être estimé en additionnant
"hydrauliquement" les débits élémentaires de chaque tube capillaire. Cette hypothèse est toute fois très
peu réaliste car la géométrie et la direction des conduits sont très variables.
1.5.1.2 Approche macroscopique Dans le cadre d’une approche macroscopique, on considère que l’écoulement au travers d’une portion
ou élément de sol s’effectue globalement de manière uniforme sur toute sa section. Les spécificités
locales de l’écoulement ne s’expriment ainsi pas de manière explicite, mais se reflètent dans un
comportement global [Crawford, 1994].
La vitesse réelle de l’eau au travers d’un élément de sol varie d’un point à un autre. Si l’on considère
une section donnée, la vitesse réelle moyenne ou vitesse moyenne de pore Vr s’exprime par le rapport
du débit Q à la section globale des pores qui participent à l’écoulement Sr .
rr S
Qv = (1.33)
Comme cette section ne peut en général être mesurée, une vitesse fictive v, exprimant le rapport entre
le débit Q et la section totale de la portion de sol considérée S, est substituée à la vitesse moyenne de
pore:

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 28
SQv = (1.34)
La vitesse fictive et la vitesse moyenne de pore sont liées par la porosité du sol. Ce paramètre
représente en effet le rapport du volume de sol effectivement utilisé par l’écoulement au volume total de
l’élément de sol considéré, donc le rapport de la section réelle d’écoulement à la section totale:
fvvf
SS
rr == et (1.35)
Il apparaît ainsi que la vitesse moyenne de pore est supérieure à la vitesse fictive. Comme la
description des processus de transfert dans le sol repose sur une approche macroscopique, la
cinématique de la phase liquide est décrite par la vitesse fictive.
La loi de Darcy a été établie dans des conditions d’écoulement particulières qui limitent sa validité. Les
principales hypothèses qui sous-tendent cette loi sont les suivantes :
- matrice solide homogène, isotrope et stable,
- fluide homogène, isotherme et incompressible,
- énergie cinétique négligeable,
- régime d’écoulement permanent,
- écoulement laminaire.
Les variations spatiales de masse volumique (compressibilité, hétérogénéité) et de viscosité
(température) de la phase liquide sont suffisamment faibles pour que leur effet puisse être
généralement négligé. Il en va de même des variations de ces paramètres sous l’effet de l’interaction
solide-liquide dans le cas d’une matrice solide peu stable. Le caractère hétérogène et anisotrope de la
phase solide peut être pris en compte en exprimant la conductivité hydraulique non plus comme un
scalaire, mais comme un tenseur. Finalement, les faibles vitesses d’écoulement rencontrées dans les
sols permettent de ne pas tenir compte de l’énergie cinétique. Les principales limitations à la validité de
la loi de Darcy découlent par conséquent des deux dernières hypothèses, à savoir un écoulement
laminaire et un régime permanent.
1.5.1.3 La conductivité hydraulique à saturation
La conductivité hydraulique Ks à saturation apparaissant dans la loi de Darcy est une manifestation de
l’effet de résistance à l’écoulement dû aux forces de frottement. La double origine de ces forces est
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 29
mise en évidence par une analyse plus détaillée de ce paramètre. Celui-ci est en effet d’une part
proportionnel à la perméabilité intrinsèque k du sol, ce qui traduit l’influence des caractéristiques de la
matrice solide sur les frottements, et de l’autre inversement proportionnel à la viscosité dynamique η du
liquide, ce qui traduit l’effet de ses spécificités propres sur l’intensité des forces de friction interne, selon
:
ηρgkK s = (1.36)
La perméabilité intrinsèque d’un sol exprime le pouvoir de résistance à l’écoulement que manifeste un
sol face à n’importe quel fluide. Il s’agit donc d’une caractéristique du sol, qui s’exprime en m2. Les
facteurs dont dépendent la perméabilité intrinsèque et, par suite, la conductivité hydraulique du sol,
relèvent de sa texture aussi bien que de sa structure. En effet, au niveau textural, la distribution
granulométrique des particules minérales détermine la surface spécifique du sol et ainsi l’intensité des
forces d’adsorption dont d'écoulement les frottements. Au niveau structurel, le mode d’arrangement de
ces particules, en définissant l’espace d’écoulement, détermine d’une part les profils de vitesse et par là
la vitesse maximale (plus le diamètre des pores est élevé et plus la résistance moyenne est faible),
mais également les trajectoires d’écoulement. Celles-ci peuvent s’éloigner notablement de la ligne
droite. La tortuosité τ d’un échantillon de sol est définie par le rapport moyen de la longueur du
cheminement réel parcouru entre deux points à la distance rectiligne qui les sépare. En règle générale,
plus la tortuosité est élevée et plus la conductivité hydraulique du milieu est faible. Pour chaque type de
sol, la loi de Darcy peut ainsi être représentée par une droite liant le flux au gradient hydraulique et dont
la pente correspond à la conductivité hydraulique à saturation.
1.5.2 Dynamique en milieu non saturé
La plupart des processus de transfert d’eau dans les sols se déroulent dans des conditions
caractérisées par une teneur en eau inférieure à la saturation. La complexité du domaine d’écoulement
est encore accrue dans le cas des écoulements non saturés par le fait que le taux de saturation du sol
devient une variable dans l’espace et dans le temps [Haverkamp, 1997].
Lorsque l’on s’éloigne de la saturation, des discontinuités apparaissent dans la masse de fluide. Il
s’ensuit que les forces de pression hydrostatique, qui avec la pesanteur constituaient les forces
motrices de l’écoulement saturé, ne peuvent plus se transmettre intégralement dans le liquide. Leur
influence s’estompe dès lors rapidement.
La force motrice de l’écoulement en milieu non saturé est donc un gradient de potentiel total, résultant

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 30
de la somme des potentiels de pression matricielle et de gravité. Comme l’intensité des forces de
rétention et le potentiel de pression qui en découle dépendent de la teneur en eau, grandeur elle-même
variable au cours du processus, la force motrice de l’écoulement varie non seulement d’un point à
l’autre du sol, mais également localement au cours du temps. Elle est, de plus, conditionnée par le
phénomène d’hystérèse.
En milieu non saturé, la relation entre la vitesse fictive de l’écoulement et les diverses forces qui la
conditionnent, s’exprime de manière analogue à la loi de Darcy en milieu saturé.
Le comportement dynamique global de la phase liquide en milieu non saturé est décrit par une relation
flux-gradient de potentiel essentiellement non linéaire. La loi de Darcy ne s’applique ainsi que de
manière discrète, si bien que sa généralisation aux écoulements non saturés implique que le gradient
de potentiel soit exprimé de manière ponctuelle et la conductivité hydraulique sous la forme d’une
fonction de la teneur en eau ou du potentiel de pression, puisque ces deux grandeurs sont liées :
( ) HgradhKq −= ou ( ) HgradKq θ−= (1.37)
que l'on peut développer de la manière suivante:
( ) [ ]zhgradhKq +−= équation en h (1.38)
( ) ( )[ ]zhgradhKq +−= θ équation en θ (1.39)
Dans l’équation en h, la description des caractéristiques du sol repose sur la seule relation K(h),
synthèse des relations K(θ) et h(θ). La conductivité hydraulique est alors affectée par le phénomène
d’hystérèse. C’est la raison pour laquelle l’usage de cette formulation se limite en pratique aux cas où la
variation de la charge de pression est monotone, c’est-à-dire lorsqu’elle croît ou décroît de manière
continue.
1.5.2.1 La Conductivité hydraulique En conditions saturées, le potentiel de pression matricielle est nul et la teneur en eau maximale. La
conductivité hydraulique est alors constante à sa valeur maximale, la conductivité hydraulique à
saturation. En conditions non saturées, la teneur en eau θ et la charge de pression h diminuent à
mesure que l’on s’éloigne de la saturation. Par l’augmentation de la tortuosité et la diminution des
vitesses, la conductivité hydraulique diminue alors également rapidement. Les relations liant la
conductivité à la charge de pression ou à la teneur en eau sont complexes et dépendent du type de sol

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 31
considéré, par le biais de ses caractéristiques structurales et texturales [Koppi, 1991].
La diminution de la teneur en eau entraîne en général une baisse rapide de la conductivité hydraulique.
En effet, alors même que la charge de pression ne passe que de 0 à 1m, la conductivité hydraulique
peut diminuer, selon les sols, de plusieurs ordres de grandeurs. La relation K(h) étant davantage sujette
à l’hystérèse, on préfère généralement décrire le sol par la paire de relations K(θ) et h(θ), dénommées
courbes caractéristiques du sol. L’allure de la relation K(θ) indique que la conductivité est nulle au-
dessous d’un seuil θo, et qu’elle croît de façon exponentielle pour atteindre sa valeur maximale à
saturation.
Les tentatives de déduction de la courbe de conductivité hydraulique d’après des grandeurs
caractéristiques de la texture et de la structure du sol n’ont pas débouché sur des résultats probants.
C’est la raison pour laquelle, comme dans le cas de la courbe caractéristique d’humidité du sol,
l'expression mathématique des courbes de conductivité hydraulique repose sur l’ajustement de valeurs
expérimentales sur des lois mathématiques empiriques, telles que :
Brooks & Corey [Brooks & Corey, 1964] : λ est un paramètre reflétant la porosimétrie du sol.
Pour h(θ) λ
θθθθ
=
−−
hhbc
rs
r (1.40)
( )λ
θθθθ
θ23+
−−
=rs
rsKK (1.41)
Van Genuchten [Van Genuchten, 1980]: m est n sont de constantes empiriques lies à la "structure" et
"texture" du sol
Pour h(θ)
mn
vgrs
r
hh
−
+=
−− 1
θθθθ
ou n
m 21−= (1.42)
( )
21
21
11
−−
−−
−−
=
mm
rs
r
rs
rsKK
θθθθ
θθθθ
θ (1.43)

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 32
1.5.3 Détermination expérimentale
La relation entre conductivité hydraulique d’un sol et teneur en eau peut être déduite de l’analyse de
l’évolution spatio-temporelle des profils hydriques et tensiométriques obtenus lors d’une infiltration à flux
constant. La loi de Darcy pour un écoulement vertical s’exprime en effet comme :
( )zqKq
∂∂
−= θ (1.44)
Soit à la cote altimétrique z :
( ) ( )z
z
zHqK∂
∂−=θ (1.45)
D’après les développements effectués précédemment, le flux au temps t et à la cote z et se produisant
à une teneur en eau θt,z est déterminé par l’équation de continuité:
( )z
z
z ooz St
qzt
qq ∫ −=∂= 2
1
11_ ∆∆
θ∆∆
(1.46)
L’intégrale étant prise entre les profils hydriques des temps ti-1 et ti+1 et entre les cotes z=O et z=z. Ainsi,
si l’on dispose de trois profils hydriques successifs, il est possible d’évaluer les flux correspondant à
diverses valeurs de teneur en eau, chacune d’entre elles correspondant à une cote z différente au
temps t. En relevant sur le profil de charge totale au temps t les pentes correspondant à ces diverses
cotes, on obtient finalement pour chaque valeur de teneur en eau un couple (qz,δH/δz), duquel on déduit
la valeur de la conductivité hydraulique correspondante. Ces valeurs sont alors reportées en fonction de
la teneur en eau sur un graphique et ajustées par une loi empirique (§1.4.2.1).
1.6 Synthèse du Chapitre
L'approche les plus simple du problème des transferts de liquide dans le milieux poreux considérés à
l'échelle microscopique est constituée par les modèles de faisceaux de tubes capillaires. Ceux-cis
permettent notamment de mettre en évidence l'origine des phénomènes d'hystérésis. Ces modèles
peuvent être affinés en introduisant des tubes présentant des irrégularités géométriques. Les modèles
plus élaborés de réseaux aléatoires 2D et 3D, étudies au moyen de la théorie de la percolation, mettent
en évidence le rôle de la topologie, c'est à dire de l'organisation des connexions entre les éléments
constitutifs de l'espace poreux.
Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 33
La loi de Darcy décrit à l'échelle macroscopique l'écoulement des fluides dans les milieux poreux. En
théorie, elle découle de l'intégration des équations de Navier-Stokes dans un domaine spatial définie
comme l'élément de volume représentatif, en présence de frontières solides extrêmement complexes.
Mais il est rarement possible de réaliser effectivement cette intégration. Les modèles de gaz sur réseau,
dans lesquels le fluide est représenté par des particules soumises à ses règles de collision, offrent une
alternative plus économique en calcul pour intégrer la topologie complexe du milieu, et mettre en
évidence le comportement macroscopique darcien.
Dans le domaine particulier de la physique des sols, la théorie des écoulements en milieux poreux
apporte les outils nécessaires à l'étude des principaux processus. Elle permet de mettre en évidence,
par exemple, l'influence de la texture et de la structure des sols sur les caractéristiques
hydrodynamiques.
Un premier objectif de ce travail est élaborer une formulation mathématique robuste de la structure
complexe du milieu basée sur les concepts de la géométrie (2D et 3D), pour essayer de prendre en
compte la réalité géométrique dans les modèles de simulation de propriétés de transfert. Pour cela, la
"Géométrie Discrète" (adaptée aux contraintes de l'informatique) est introduite. Les concepts qui sont
développé permettent une représentation de la forme par des opérateurs géométriques (chapitre §2).
Ainsi, seront exposés les outils mathématiques nécessaires à la mesure des paramètres
morphologiques et topologiques de la structure (chapitre §3).

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 34

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 35

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 36
DESCRIPTION DES MILIEUX POREUX - PHENOMENES DE TRANSFERTS ...........5
1.1 Introduction ...............................................................................................................................................7
1.2 La Géométrie des Milieux Poreux............................................................................................................8
1.2.1 La structure solide ...............................................................................................................................8
1.2.2 La structure poreuse ............................................................................................................................9
1.3 L’eau en Milieu Poreux...........................................................................................................................10
1.4 Transport d’eau en milieu poreux .........................................................................................................13
1.4.1 Echelle microscopique – pores..........................................................................................................13
1.4.1.1 Loi de Poiseuille ............................................................................................................................13
1.4.1.2 Imbibition et drainage....................................................................................................................14
1.4.1.3 Phénomène d’hystérése .................................................................................................................15
1.4.1.4 Modèles de Simulation ..................................................................................................................16
1.4.1.4.1 Faisceau des tubes capillaires..................................................................................................16
1.4.1.4.2 Réseaux de pores .....................................................................................................................18
1.4.1.4.3 Théorie de la percolation.........................................................................................................18
1.4.1.4.4 Distribution des éléments solides ............................................................................................21
1.4.2 Echelle macroscopique......................................................................................................................21
1.4.2.1 La loi de Darcy ..............................................................................................................................22
1.4.2.2 Modèles de Simulation ..................................................................................................................23
1.4.2.2.1 Volume élémentaire représentatif - V.E.R. .............................................................................23
1.4.2.2.2 Equations de Navier Stokes.....................................................................................................24
1.4.2.2.3 Simulation "Gaz sur Réseaux" ................................................................................................26
1.5 Caractérisation hydrique - Les sols .......................................................................................................26
1.5.1 Dynamique en milieu saturé ..............................................................................................................26
1.5.1.1 Approche microscopique...............................................................................................................27
1.5.1.2 Approche macroscopique ..............................................................................................................27
1.5.1.3 La conductivité hydraulique à saturation.......................................................................................28
1.5.2 Dynamique en milieu non saturé .......................................................................................................29
1.5.2.1 La Conductivité hydraulique .........................................................................................................30
1.5.3 Détermination expérimentale ............................................................................................................32
1.6 Synthèse du Chapitre ..............................................................................................................................32

Chapitre 1. Description des Milieux Poreux - Phénomènes de transferts - 37

Chapitre 2. La Géométrie Discrète et la Description de Formes - 35
Chapitre 2
La Géométrie Discrète et la Description de Formes

Chapitre 2. La Géométrie Discrète et la Description de Formes - 36

Chapitre 2. La Géométrie Discrète et la Description de Formes - 37
2.1. Introduction Les milieux poreux naturels ont une structure géométrique complexe qu'il est difficile d'interpréter sans
l’aide des outils informatiques. Diverses méthodologies mathématiques de discrétisation [Thovert,
1992] et de modélisation de l’espace poreux ont été proposées tels les éléments finis et les volumes
finis [Quintard, 1993; Hammecker, 1993], ou la théorie de la percolation [Essam, 1980; Daian, 1994]).
Le problème principal de ces méthodologies, est la représentation discrète de la géométrie réelle du
milieu de façon optimale, pour permettre l’analyse de structures multi-poreuses telles que les fissures.
Le premier objectif de ce chapitre est la présentation des notions de base et les concepts développés
pour l’adaptation de la géométrie Euclidienne à l’espace discret Zn, interprété par ordinateur. Seront
introduits d’abord les concepts dans le plan et les extensions nécessaires à la dimension supérieure :
l’espace 3D.
A partir des concepts de la géométrie discrète et ses algorithmes, l’objectif principal du chapitre est le
développement des descripteurs structuraux de la forme en 2D et 3D. Les techniques et méthodologies
développées sont basées sur les concepts des squelettes centrés dans la forme pour conserver et
représenter la morphologie et la topologie du milieu.
La structure du chapitre présente dans un premier temps les concepts et les algorithmes séquentiels de
la géométrie discrète nécessaires au plan 2D, puis les développements dans l’espace 3D. Les concepts
géométriques de cercles discrets et les erreurs associées sont développés, ainsi que pour les sphères
en 3D selon les métriques étudiées. Les opérateurs structuraux pour la description de formes sont
introduits pour le plan, à partir des squelettes pondérés et avec les bases mathématiques nécessaires.
Ainsi, les développements des opérateurs de squelette en 3D sont présentés avec les extensions et
simplifications (filtres, orthogonalités), proposées de façon à optimiser leur application.
2.2. La Géométrie Discrète Depuis les années 1950, l'association de l'image et de l'ordinateur connaît un essor considérable, tant
en ce qui concerne le domaine de l'analyse que celui de la synthèse d'images. L'analyse d'images
s'attache à construire une description explicite du contenu de l'image, tandis que la synthèse d'images
modélise d'une scène.
L'élément commun à tous les domaines est l'image, qui intervient aussi bien du point de vue du
stockage et de la visualisation de l'information que des traitements à réaliser. Ces aspects sont
fortement liés à la donnée informatique, tant au niveau logiciel qu'au niveau des capteurs, des matériels

Chapitre 2. La Géométrie Discrète et la Description de Formes - 38
d'affichage et de l'architecture des unités de traitement. Ces contraintes ont conduit à représenter
l'image dans l'espace discret, puis à raisonner en restant dans cet espace : il s'agit de la géométrie
discrète [Rosenfeld, 1986; Chassery, 1991].
2.2.1. Définitions et notions de base en 2D – L’Analyse d’image L'analyse d'images par ordinateur doit travailler sur des données discrètes, de support fini [Pratt, 1991;
Chassery, 1996]. La représentation de base est l'image discrète, dont le support est associé à un
maillage, qui précise l'arrangement des points entre eux.
L'échantillonnage de la scène est fourni par un capteur, dont les cellules sont le plus souvent disposées
régulièrement. On a donc tout intérêt à se placer dans l'espace de l'acquisition, où le maillage est
régulier. Les trois maillages réguliers utilisés dans le plan [Chassery, 1991] sont les maillages carré,
hexagonal et triangulaire.
Le maillage carré est bien sûr le plus commun, les capteurs ainsi que les écrans d'ordinateur l'utilisent.
Le support est le réseau fondamental de Ζ2, qui est le plus aisé à manipuler. Il faut cependant tenir
compte des types de connexité, avec 4 ou voisins, directs ou indirects. Les écrans de télévision ont
utilisé le maillage hexagonal pour améliorer le rendu de l'image (entrelacement, antialasing, densité des
points).
2.2.1.1. Voisinages et connexité Une image binaire de taille N x M à valeurs dans [0, 1] est codée par une matrice d'entiers de même
taille [Rosenfeld, 1986]. Elle contient des objets, qui sont des ensembles connexes de points étiquetés
à 1, le fond étant à 0 (figure 2.2).
0 1 0 1 0 0 0 0 1 0 0 0 → 0 0 1 0 0 0 0 0 1 1 1 0 0 1 0 0 1 0
Fig. 2.2 - Représentation d'une image discrète
Un point p de l'image est défini par ses coordonnées cartésiennes (abscisse, ordonnée). Le point p a 4
voisins directs et 4 voisins indirects (figure 2.3).
On définit donc le 4-voisinage et le 8-voisinage, en considérant respectivement les voisins directs, ou
les voisins directs et indirects.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 39
P P a b
Fig. 2.3 - Voisins directs (a) et indirects (b)
Un chemin de po à pk est une suite de points po, pi, ..., pk telle que pi est voisin de pi-1, pour 1 ≤ i ≤ k. On
dit que le chemin est n-connexe (n = 4 ou 8) selon le type de voisinage, ou *-connexe si le type n'est
pas établi.
Un arc est un chemin tel que chaque point a exactement 2 voisins, sauf les extrémités qui n'en ont
qu'un. Enfin une courbe est un arc fermé.
Deux points voisins sont dits adjacents et deux points reliés par un chemin sont connectés. Les
définitions d'objet, d'arc et de courbe sont toutes à prendre pour un type de connexité fixé.
Le théorème de Jordan discret se formule alors:
Théorème 2.1 (Jordan discret): Le complémentaire de toute courbe discrète connexe (respectivement
8-connexe) est formé de deux composantes 8-connexes (respectivement 4-connexes): l'intérieur et
l'extérieur de la courbe.
Les nombres de connexité donnent en un point p le nombre de composantes connexes formées par son
8-voisinage en 'tournant' autour du point. Ils sont donc compris entre 0 et 4. Soit B=bi ∈ [0, 1] , i= O..7
l'ensemble des points constituant le 8-voisinage de p, numérotés dans l'ordre
765
04
123
bbbbpbbbb
et soit ii bb −=−
1 . Les indices sont à prendre modulo 8.
Le "crossing number" X4 est le nombre de composantes 4-connexes [Rutovitz, 1966]
( ) ∑=
+ −=7
014 2
1k
kk bbBX (2.1)

Chapitre 2. La Géométrie Discrète et la Description de Formes - 40
Le "connectivity number" C8 est le nombre de composantes 8-connexes [Yokoi, 1975]
( ) ∑=
+
−
+
−−−
−+=
3
022122264208
kkkkk bbbbbbbbBC (2.2)
(si le premier terme b0b2b4b6 vaut 1, alors p est 4-interne, et le second terme vaut 0; on néglige parfois
le calcul du premier terme).
0 0 0 0 0 0 0 0 0 0 0 0 0 0 x x x x 0 0 0 0 0 x 0 0 0 x 0 0 x x 0 0 0 x 0 x 0 0 x x x 0 x 0 0 x 0 0 x 0 0 0 0 x x x 0 0 0 x x 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Courbe 4-connexe et
Intérieur 8-connexe Courbe 8-connexe et
intérieur 4-connexe Fig. 2.4 - Dualité des connexités
2.2.1.2. Distances discrètes L'idée centrale de la plupart des distances discrètes consiste à approcher dE (distance euclidienne) par
propagation de distances locales [Rosenfeld, 1966]. La raison en est l'efficacité de calcul, car pour
étiqueter un point, seul un petit voisinage est consulté.
La notion de distance est utile pour quantifier et décrire les objets présents dans une image. La volonté
de rester dans l'espace de l'image impose l'utilisation de distances spécifiques, qui fournissent des
résultats exclusivement entiers.
Définition 2.1 (Distance discrète): On appelle distance discrète sur un espace IE une application d:IE
x IE -> lN vérifiant: ∀ A, B, C ∈ IE
( ) ( ) BABAdBAd =⇔=≥ 0, ;0, .1 définitie positive (2.3)
( ) ( )ABdBAd ,, .2 = symétrique (2.4)
( ) ( ) ( )BCdCAdBAd ,,, .3 +≤ inégalité triangulaire (2.5)
Pour deux points A(xa,ba) et B(xb,yb), les normes usuelles pour (ξ1,…,ξn) dans lRn

Chapitre 2. La Géométrie Discrète et la Description de Formes - 41
∑=
=n
iid
11 ξ ∑
=
=n
iid
1
22 ξ i
id ξsup=∞ (2.6)
vont devenir respectivement d4 ≥ dE ≥d8 dans Z2, en l'occurrence
( ) abab yyxxBAd −+−=,4 city block,Manhattan, diamond (2.7)
( ) ( )abab yyxxBAd −+−= max,8 chessboard, échiquier, square (2.8)
( ) ( ) ( )22, ababE yyxxBAd −+−= distance euclidienne (2.9)
Les distances discrètes d4 et d8 sont les premières à avoir été employées dans les images de distance,
car elles sont simplissimes à calculer, tandis que dE n'est pas une distance discrète. Les distances d4 et
d8 tirent leur notation de leur disque unité (figure 2.5).
(a)
1101
1 (b)
111101111
Fig. 2.5 - Disques unité de (a) d4 et (b) d8
Définition 2.2 (Image de distance) Etant donné un ensemble X dans un espace métrique (lE,d), on
appelle image (ou carte) de distance l'image notée DMX telle que la valeur attribuée en tout point p est
égale à la distance de p au complémentaire de X:
( )
∈=
→−−
XqqpdXpdpDM x ,,inf,
a
ΝΕ (2.10)
Les cartes de distance de d4 et d8 présentent des courbes de niveaux caractéristiques (figure 2.6). En
effet ces distances sont relatives à la connexité entre points d'une image.
Les boules de d4 et d8 n'étant pas circulaires (§2.1.6), les valeurs obtenues sont sensiblement
différentes de celles associées à dE, d'où une anisotropie, et une non-robustesse à la rotation de l'image
des traitements fondés sur d4 et d8.
Les images de distance sont utilisées dans de nombreuses applications, [Serra, 1982; 1988]. En
général, les résultats seront d'autant meilleurs que la distance employée approximera correctement dE.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 42
Mais une "meilleure" distance requiert souvent plus de calculs ou de mémoire. Il est donc intéressant de
disposer de distances variées.
1 1 1 1 1 1 1 1 1 1 1 1 1 2 2 2 2 1 1 2 2 2 2 1 1 2 3 3 2 1 1 2 2 2 2 1 1 1 2 2 1 1 1 1 2 1 1 1 1 1 1 1
a b Fig. 2.6 - DM pour (a) d4 et (b) d8
2.2.1.3. Distance Euclidienne Utiliser la distance euclidienne serait bien entendu la solution idéale, mais [Rosenfeld, 1986] ni (dE)2,
int(dE), ou trunc(dE) ne sont des distances. Ces fonctions ne respectent pas l'inégalité triangulaire1, en
particulier pour les petites valeurs.
On est donc contraint de changer de système de représentation, en stockant des vecteurs au lieu de
distances. Ces vecteurs indiquent le point le plus proche du fond, et peuvent être signés, ou stockés en
valeurs absolues.
L'isotropie des propriétés et la fiabilité des mesures sont importantes en analyse d'images. Mais son
emploi présente un certain nombre de désagréments, dont l'absence de définition locale est une cause.
Que l'on stocke l'information de distance sous la forme vectorielle (x, y), par le carré x2+y2 voire même
en réel √(x2+y2), les transformations de distance que l'on a passées en revue sont complexes et
relativement coûteuses. Il est donc judicieux de se placer dans l'espace discret, et de construire des
distances qui réalisent un bon compromis entre efficacité et maniabilité.
2.2.1.4. Distance de Chanfrein Le principe des distances de chanfrein, notées dC, est de pondérer les déplacements dans un voisinage
donné avec des entiers, puis de fixer la distance entre tout couple de points au chemin de coût minimal
les rejoignantent formé des déplacements autorisés. L'ensemble des pondérations affectées aux
déplacements autorisés définit un masque. Ces distances sont conçues dès le départ dans l'espace
discret, mais la caractéristique la plus importante réside dans l'efficacité des algorithmes de
transformation de distance.
1 Contre exemple: pour l'équation 2.5 selon la définition 2.1 dans le plan, avec la distance Euclidienne calculée par l'équation 2.9, trois éléments A, B et C de coordonnées A(0,0), B(10,5) et C(5,0): pour (dE)2: (dE)2
AB=125; (dE)2AC=25 et (dE)2
CB=50, alors (dE)2AB
>(dE)2AC + (dE)2
CB -NE SATISFAIT PAS; et pour dE: (dE)AB=11,18; (dE)AC=5,0 et (dE)CB=7,07, alors (dE)AB <(dE)AC + (dE)CB .

Chapitre 2. La Géométrie Discrète et la Description de Formes - 43
La définition de d4 et d8 revient à associer un coût de 1 aux déplacements directs ou diagonaux (figure
2.7 a,b). Il semble naturel de donner des poids plus significatifs du déplacement euclidien réalisé,
comme à la figure 2.7.c avec (1, √2). Mais cela n'est pas suffisant, car si l'erreur est annulée suivant les
directions multiples de 45°, elle prend des valeurs importantes ailleurs.
1 √2 √2 √5 4 7 110 1 0 1 0 1 0 1 0 3 0 5 a b c d e f
Fig. 2.7 - Pondérations locales
Montanari [Montanari, 1968], a ainsi eu l'idée de pondérer d'autres déplacements dans des voisinages
plus grands avec par exemple (1, √2, √5) (figure 2.7.d). La distance rationnelle qu'il obtient en prenant le
chemin de longueur minimale d'un point à un autre, formé des déplacements autorisés, peut en théorie
approcher dE autant qu'on le souhaite. Comme ces distances ne sont pas entières, le premier utilise les
poids (2, 3), ce qui revient à approcher (1, √2) par (1, 3/2).
C'est Borgefors qui popularise ces distances de chanfrein [Borgefors, 1984]. Elle préconise et justifie
l'approximation de (1, √2) par (1, 4/3) et celle de (1, √2, √5) par (1, 7/5, 11/5) (figure 2.7.e,f). Les
distances résultantes sont le chanfrein (3,4) et le chanfrein (5,7,11), notés d3,4 et d5,7,11. Des cartes de
distance les utilisant sont montrées en figure 2.8.
3 3 3 3 3 3 5 5 5 5 5 5 3 6 6 6 6 3 5 10 10 10 10 5 3 6 7 7 4 3 5 10 11 11 7 5 3 3 4 6 3 5 5 7 10 5 3 3 3 5 5 5
a b Fig. 2.8 - DM pour (a) d3,4 et (b) d5,7,11
2.2.1.5. Carte de distances – schéma algorithmique Une transformation de distance convertit une image binaire en carte de distance DM. Le calcul des
distances est en principe une tâche globale. La méthode exhaustive, qui pour chaque point teste toute
l'image, est excessivement coûteuse. Heureusement il est possible de restreindre les tests à de petits
voisinages, puisque les distances de chanfrein sont basées sur la propagation de distances locales.
L'algorithme séquentiel qui suit est dit de 'Rosenfeld'. On décompose le masque de voisinage en deux
demi-masques symétriques par rapport à 0 (figure 2.9).
Le demi-masque avant contient les points antérieurs au milieu 0 dans le sens du balayage. Ses n points

Chapitre 2. La Géométrie Discrète et la Description de Formes - 44
( i [1…N/2] où N=total d'éléments du masque sans le centre et n=N/2 éléments) ont les coordonnées (xi,
yi) et le poids wi. Le demi-masque arrière est donc constitué des n points ( i[N/2...N] ) (-xi, -yi) de poids
wi. Aucun des deux demi-masques ne contient le point 0.
11 11 4 3 4 11 7 5 7 11 3 0 5 0 a c 0 3 0 5 4 3 4 11 7 5 7 11 b 11 11 d
Fig. 2.9 - Masques séquentiels de d3,4 et d5,7,11 avant (a,c) et arrière (b,d)
Parcours avant: pour un élément de l'image A[x,y] , de haut en bas et de gauche à droite
[ ] [ ] iii wyyxxAyxA +++= ,min, (2.11)
Parcours arrière: pour un élément de l'image A[x,y] , de bas en haut et de droite à gauche
[ ] [ ] [ ] iii wyyxxAyxAyxA +−−= ,,,min, (2.12)
Cet algorithme est très efficace dans le plan discret, puisqu'il ne nécessite que deux consultations par
point de l'image A, et ce sur un voisinage restreint du point, indépendamment de la taille des objets à
traiter (figure 2.10).
3 3 3 3 3 3 3 3 3 3 3 3 3 6 6 6 6 4 3 6 6 6 6 3 3 6 9 9 8 4 → 3 6 7 7 4 3
3 6 9 12 8 3 3 4 6 3 3 6 4 3 3 3
Fig. 2.10 - DM pour d3,4 en 2 balayages séquentiels
2.2.1.6. Transformation inverse La transformation inverse part d'une image de poids, et génère le disque associé à chacun de ces
poids; elle permet par conséquent de générer des formes. Le type de l'algorithme est le même que celui
du §2.1.4, et utilise les mêmes demi-masques.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 45
Parcours avant: pour un élément de l'image A[x,y] , de haut en bas et de gauche à droite
[ ] [ ] [ ] iii wyyxxAyxAyxA −++= ,,,max, (2.13)
Parcours arrière: pour un élément de l'image A[x,y] , de bas en haut et de droite à gauche
[ ] [ ] [ ] iii wyyxxAyxAyxA −−−= ,,,max, (2.14)
La surface est extraite de DM et permet de retrouver la forme initiale par une transformation inverse de
distance (figure 2.11).
2 3 3 2 1
4 6 6 3 1 4 6 6 5 4 1 3 2 3 7 8 5 2 → 3 2 4 7 8 5 2 3 4 5 4 1 3 4 5 4 1 1 2 1 1 2 1
Fig. 2.11 - DM-1 pour d3,4 en 2 balayages séquentiels
2.2.1.7. Les Cercles Discrets Alors que le disque de la distance euclidienne est un cercle, les distances de chanfrein sont des
polygones réguliers.
On peut obtenir un cercle discret de rayon R pour un masque (a, b, ... ) donné en étiquetant chaque
point à sa distance à l'origine. Le cercle est alors l'ensemble des points de valeur inférieure ou égale à
Ra+r, où r ∈ [0, a-1]. Pour un rayon R discret il y a donc une famille de a cercles, en faisant varier r
(figure 2.12).
3 4 3 4 0 3 0 3 3 0 3 3 4 3 4 a b c
6 7 6 7 8 7 6 7 8 4 3 4 7 4 3 4 7 7 4 3 4 7
6 3 0 3 6 6 3 0 3 6 6 3 0 3 6 4 3 4 7 4 3 4 7 7 4 3 4 7 6 7 6 7 8 7 6 7 8
d e f Fig. 2.12 - Cercles discrets de d3,4 avec R=1(a,b,c) et R = 2 (c,d,f).

Chapitre 2. La Géométrie Discrète et la Description de Formes - 46
L'allure générale de ces cercles (figure 2.13) est un losange pour d4, un carré pour d8, un octogone pour
d3,4, un hexadécagone pour d5,7,11, etc. A mesure que l'on enrichit le masque, le nombre de côtés de ces
polygones augmente.
Fig. 2.13 - Les cercles discrètes selon la distance.
2.2.1.8. Taux d’erreur Les taux d'erreur relativement à la distance euclidienne vont de 41% pour d4 à 1% pour d5,7,11. En
pondérant des masques plus grands il est possible d'approximer plus finement encore la distance
euclidienne (figure 2.14 – 2.15).
0,0
0,2
0,4
0,6
0,8
1,0
0 5 10 15 20
Rayon (pixel)
Dis
tribu
tion
de P
ores
círculod3-4d5-7-11
Fig. 2.14 - L'erreur rapportée à la distance Euclidienne dans la mesure
du rayon d’un cercle (dE= triangule, d34=cercle et d5711=carré)
B CP A
A B C
|d4-dE|/dE 0% 41,42% 34,16%
|d8-dE|/dE 0% 29,29% 10,56%
|d34-dE|/dE 0% 5,71% 4,29%
|d5711-dE|/dE 0% 1,00% 1,00% Fig. 2.15 - L'erreur rapportée à la distance Euclidienne

Chapitre 2. La Géométrie Discrète et la Description de Formes - 47
2.2.2. Définitions et notions de base en 3D – l’Analyse du volume
Il serait logique de penser que toutes les définitions données pour Z2 sont généralisables dans Z3,
malheureusement ce n'est pas toujours le cas, l'espace offrant beaucoup plus de possibilités que le
plan.
La représentation de volumes 3D par ordinateur requiert un échantillonnage du volume afin d'en extraire
des valeurs discrètes. Cet échantillonnage de l'espace continu est effectué à l'aide d'un maillage,
tableau tridimensionnel de points régulièrement espacés. Chaque point de l'espace discret référence un
volume élémentaire cubique appelé voxel (le terme voxel abrège l'expression "volume element" comme
le fait pixel pour "picture element" en deux dimensions).
Cet échantillonnage de l'espace nécessite un pavage polyédrique fermé compact. Parmi les cinq
polyèdres réguliers que sont le tétraèdre (quatre faces), le cube (six faces), l'octaèdre (huit faces
triangulaires), le dodécaèdre pentagonal (douze faces pentagonales) et l'isocaèdre (vingt faces qui sont
des triangles équilatéraux égaux), seul le cube permet d'effectuer un échantillonnage régulier. Cela est
différent du cas 2D où trois maillages réguliers sont utilisées.
En dehors des polyèdres réguliers d'autres motifs sont utilisables pour échantillonner l'espace (modèle
"cubique face centré" par exemple) mais leur champ d'utilisation est très réduit à cause des difficultés
de raisonnement qu'ils occasionnent. Dans la suite nous n'utiliserons que le maillage cubique.
Ainsi échantillonné, tout volume discret peut être défini par sa fonction caractéristique f.
( ) ( )kjiff
,,kj,i, : 3
→→ ΙΖ
(2.15)
Si I se réduit à l'ensemble ( 0 , 1), le volume est dit binaire. Comme pour les images 2D, les volumes
peuvent être codés à l'aide de matrices, cette fois elles doivent être tridimensionnelles.
2.2.2.1. Voisinage, connexité et nombre d’Euler La notion de chemin connexe est la même que dans le plan [Barr, 1987]. Elle est directement liée à la
notion de voisinage utilisée qui détermine les points potentiellement consécutifs d'un point donné. Un
chemin 26-connexe peut donc être décomposé en trois sortes de voisins d'un voxel: une partie où les
voxels sont 6-voisins, une partie où les voxels sont 18-voisins et non 6-voisins, et une partie où les
voxels sont 26-voisins sans être ni 6- ni 18-voisins.
Les notions de courbe et de composante connexe sont les généralisations de celles données dans le

Chapitre 2. La Géométrie Discrète et la Description de Formes - 48
plan.
De même qu'en 2D, le complémentaire d'un volume doit être analysé avec la distance duale de celle
utilisée pour l'objet. Par exemple si on utilise la 6-connexité pour l'objet il faut utiliser la 26-connexité
pour le fond, et vice versa. Dans le cas où on utilise la 18-connexité il est nécessaire de définir sa
distance duale, parfois notée d'18.
A l'aide des notions de voisinage, on déduit la notion de point bord:
-On appelle point bord d'un objet tout point dont l'un des 6-voisins est dans le complémentaire de cet
objet.
-On appelle point de type "Ouest" (respectivement Est, Nord, Sud, Haut et Bas) tout point dont le voisin
dans la direction Ouest (respectivement Est, Nord, Sud, Haut et Bas) et dans le complémentaire de
l'objet considéré.
Les directions Nord, Sud, Est, Ouest, Haut et Bas sont définies selon le schéma de la a figure 2.16.
Fig. 2.16. Les 6 directions de l'espace.
- On appelle trou de l'objet toute composante connexe finie du complémentaire de l'objet.
On définit ainsi deux sortes de trous:
-Les cavités sont définies comme les composantes connexes finies (au sens de la connexité
complémentaire de l'objet) du complémentaire de l'objet.
-Le fond est donc simplement la composante connexe infinie du complémentaire.
On défini aussi la notion d'anse, elle se forme quand, à partir d'un solide, on perce un tunnel le
traversant de part en part. Ces objets comportant des anses peuvent être mis en bijection avec tores.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 49
C'est à partir du nombre d'anses qu'est défini le "genre" de l'objet, c'est un invariant topologique. On
montre que :
TfaS 22 −=+− (2.16)
où S est le nombre de sommets de l'objet, a le nombre d'arêtes, f le nombre de faces et T représente le
nombre d'anses (tunnels) (figure 2.17).
On peut généraliser la notion de nombre de connexité défini dans le plan en définissant le nombre de
d'Euler e :
CTKe +−= (2.17)
où K est le nombre de composantes, T le nombre d'anses et C le nombre de cavités.
Objet K C T S a f e
a 1 0 0 32 60 30 1
b 1 0 1 32 64 32 0
c 1 1 0 56 108 54 2
(d) K : nombre de composantes, C : nombre de cavités, T : nombre d'anses, S : nombre de sommets, a : nombre d'arêtes, f :
nombre de faces, e : nombre d'Euler
Fig. 2.17 - Objets 3D : (a) objet fermé, (b) objet avec anse, (c) objets
avec cavité, (d) invariants topologiques.
2.2.2.2. Distances discrètes dans Z3 - Distance Euclidienne La distance euclidienne entre deux voxels U et V est définie par:

Chapitre 2. La Géométrie Discrète et la Description de Formes - 50
( ) ( )( )( )
( )∑=
−=
=3
1
2
321321
,,,,,
iii
EE
uv
vvvuuudVUd (2.18)
La distance entre les coins opposés d'un cube N x N x N est N√3 et celle entre deux des coins opposés
de l'une de ses faces est N√2. Elle permet de définir des boules euclidiennes (figure 2.18).
Fig. 2.18 - Une sphère réel et ça boule euclidienne discrète.
Ces valeurs n'étant pas entières et les fonctions pour les rendre entières n'étant pas compatibles avec
les propriétés nécessaires à la définition d'une distance, il est nécessaire, là aussi, de définir des
métriques à valeurs entières.
2.2.2.3. Distance d6 La distance d6 est la généralisation de la distance de Manhattan. Sa définition est :
( ) ∑=
−=3
16 ,
iii vuVUd (2.19)
Elle permet de définir la notion de 6-voisinage d'un point :
( ) ( ) 1uuu que tel,, 3322113216 =−+−+−= vvvvvvVUN (2.20)
En fait deux voxels sont 6-voisins s'ils partagent l'une de leurs faces (ils sont six) (figure 2.19). La
distance entre les coins opposés d'un cube N x N x N est 3N, celle entre les coins opposés de l'une de
ses faces est 2N.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 51
Fig. 2.19 - La voisinage d'un point selon d6
On peut démontrer que :
( ) ( )VUdVUdVU E ,,,, 63 ≥∈∀ Ζ (2.21)
Pour la distance d6 , l'image de distance (on devrait dire "volume de distance") peut être calculée en
deux passages sur le volume à l'aide de pondérations locales. Le principe d'obtention est le même que
celui utilisé en 2D (§2.2.3.2), le premier passage se fait selon l'une des diagonales et le second dans le
sens inverse. Les masques utilisés sont cette fois tridimensionnels.
2.2.2.4. Distance d26 Elle est la généralisation dans l'espace discret de la distance de l'échiquier définie dans le plan. Elle est
donnée par:
( ) iiivuMaxVUd −==
=
3
126 , (2.22)
Dans ce cas, le 26-voisinage d'un voxel est constitué de tous les voxels partageant avec lui, soit l'une
de leurs faces (ils sont six), soit uniquement une de leurs arêtes (ils sont douze), soit uniquement un de
leurs sommets (ils sont huit). Le 26-voisinage d'un voxel comprend donc vingt-six voxels (figure 2.20).
La distance entre deux coins opposés d'un cube N x N x N est N, de même que la distance entre deux
coins opposés de l'une des faces de ce même cube.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 52
Fig. 2.20 - La 26-voisinage d'un point selon d26
On peut démontrer que :
( ) ( )VUdVUdVU E ,,,, 263 ≤∈∀ Ζ (2.23)
Là encore l'image de distance peut être calculée en deux passages à l'aide de deux masques. La
distance d26 est la distance duale de d6.
2.2.2.5. Distance d18 Il n'en existe pas de définition formelle simple. Elle est en fait définie par l'intermédiaire de la notion de
voisinage. On a :
( ) ( )
≤−<= ∑=
3
2
2i32118 2u0 que tel,,
iivvvvVUN (2.24)
Deux voxels sont voisins (18-voisins) s'ils ont, soit l'une de leurs faces, soit uniquement une de leurs
arêtes en commun. Chaque voxel a ainsi dix-huit voisins (figure 2.21).
La distance entre les coins opposés d'un cube N x N x N est 2N, celle entre deux coins opposés de
l'une de ses faces est N. On démontre que, pour tous les points de l'espace à l'exception des huit points
(±1,±1,±1), on a:
( ) ( )VUdVUdVU E ,,,, 183 ≤∈∀ Ζ (2.25)
Cette propriété, adjointe à ses semblables pour les distances d6 et d26, permet de définir d'autres
distances telles que les distances (hyper) octogonales 6/18, 6/26 ou même 18/26, en combinant les
distances correspondantes.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 53
Fig. 2.21 - Le 18-voisinage d'un point selon d18.
2.2.2.6. Distances du chanfrein Comme dans le plan discret, il semble intéressant d'approcher mieux la distance euclidienne dans
l'espace (§2.1.3.2) [Coquin, 1994]. Les distances du chanfrein sont utilisées, elles sont basées sur la
même idée qu'en 2D. Ainsi, la distance du chanfrein d345 permet d'approcher √2 par 4/3 et √3 par 5/3
(figure 2.22)
5 4 5 4 3 4 5 4 5 4 3 4 3 0 3 4 3 4 5 4 5 4 3 4 5 4 5 a b c
Fig. 2.22 - La masque de chanfrein d345 (d26-vosinage);
2.2.2.7. Volume de distances – schéma algorithmique Une transformation de distance convertit un volume binaire en carte de distance volumique VDM. Le
calcul des distances est analogue à celui du plan. On décompose le masque volumique 3D en deux
demi-masques volumique symétriques par rapport à 0 (figure 2.23).

Chapitre 2. La Géométrie Discrète et la Description de Formes - 54
(a) (b)
Fig. 2.23 - Masques séquentiels pour la distance du chanfrein d345 , avant (a) et arrière (b)
Le demi-masque avant contient les points antérieurs au milieu 0 dans le sens du balayage. Ses n points
ont les coordonnées (xi, yi, zi) et le poids wi. Le demi-masque arrière est donc constitué des n points (-
xi, -yi, -zi) de poids wi. Aucun des deux demi-masques volumiques ne contient le point 0.
Parcours avant: pour un élément voxel du volume VA[x,y,z], de haut en bas et de gauche à droite
[ ] [ ] iiii wzzyyxxVAzyxVA ++++= ,,min,, (2.26)
Parcours arrière: pour un élément voxel du volume VA[x,y,z], de bas en haut et de droite à gauche
[ ] [ ] [ ] iiii wzzyyxxVAzyxVAzyxVA +−−−= ,,,,,min,, (2.27)
Cet algorithme est aussi très efficace en O(N3), puisqu'il ne nécessite que deux consultations par point
du volume VA, et ce sur un voisinage restreint du point, indépendamment de la taille des objets à traiter.
2.2.2.8. Transformation inverse La transformation inverse part d'un volume de poids, et génère la sphère associée à chacun de ces
poids; elle permet par conséquent la génération de formes. Le type de l'algorithme est le même que
celui du §2.1.5, et utilise les mêmes demi-masques volumiques §2.2.4.
Parcours avant: pour un élément voxel du volume VA[x,y,z], de haut en bas et de gauche à droite
[ ] [ ] iiii wzzyyxxVAzyxVA −+++= ,,min,, (2.28)

Chapitre 2. La Géométrie Discrète et la Description de Formes - 55
Parcours arrière: pour un élément voxel du volume VA[x,y,z], de bas en haut et de droite à gauche
[ ] [ ] [ ] iiii wzzyyxxVAzyxVAzyxVA −−−−= ,,,,,min,, (2.29)
Il est extrait de VDM et permet de retrouver la forme initiale par une transformation inverse de distance.
2.2.2.9. Les Sphères Discrètes Les sphères discrètes définies par d6 sont des octaèdres discrets dont les faces sont inclinées de plus
ou moins 45° par rapport à chacun des axes; c'est l'équivalent du diamant en 2D (figure 2.24.a). Les
boules définies par d18 sont des polyèdres discrets à quatorze faces; ce sont en fait des cubes boules
de d26 qui ont été tronqués parallèlement aux faces de l'octaèdre boule de d6 (figure 2.24.b). La boule
d26 forme un cube centré en V et ayant sur une arête 2r+1 voxels (figure 2.25).
(a) (b)
Fig. 2.24 - La boule discrète selon d6 (a) et selon d18 (b).
Fig. 2.25 - La boule discrète selon d26
Les boules discrètes pour les distances de chanfrein varient selon le schéma de voisinage, ou le
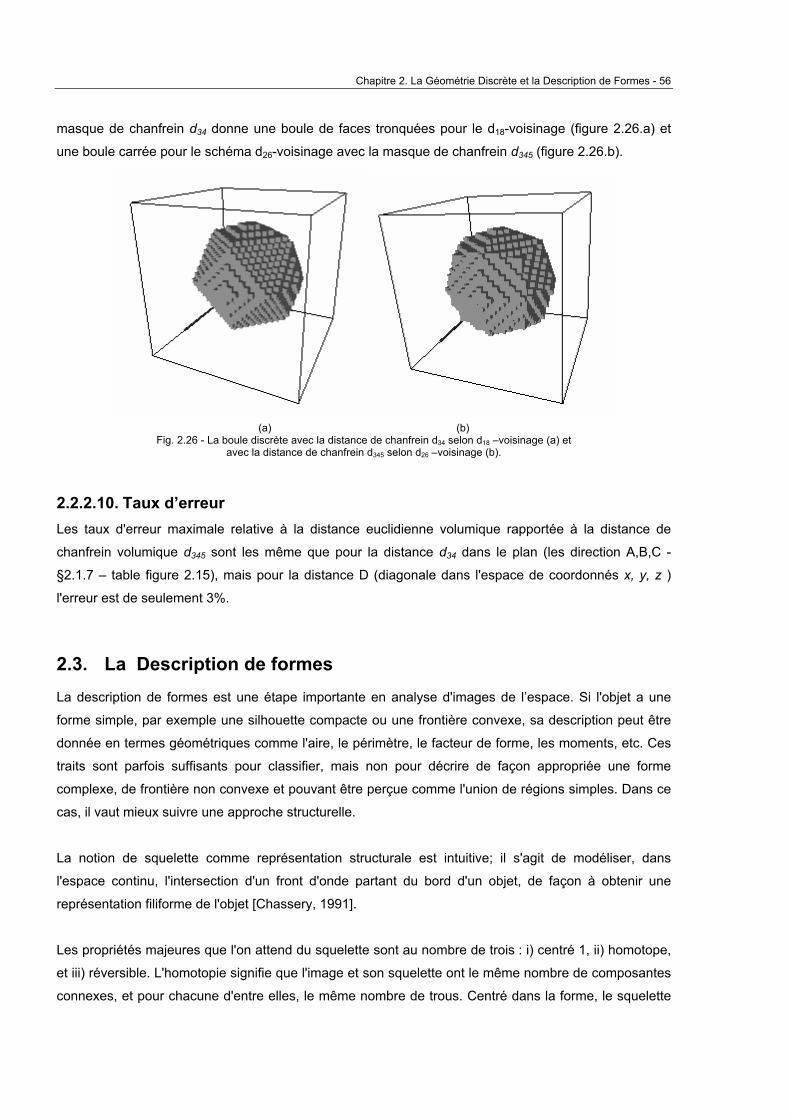
Chapitre 2. La Géométrie Discrète et la Description de Formes - 56
masque de chanfrein d34 donne une boule de faces tronquées pour le d18-voisinage (figure 2.26.a) et
une boule carrée pour le schéma d26-voisinage avec la masque de chanfrein d345 (figure 2.26.b).
(a) (b)
Fig. 2.26 - La boule discrète avec la distance de chanfrein d34 selon d18 –voisinage (a) et avec la distance de chanfrein d345 selon d26 –voisinage (b).
2.2.2.10. Taux d’erreur Les taux d'erreur maximale relative à la distance euclidienne volumique rapportée à la distance de
chanfrein volumique d345 sont les même que pour la distance d34 dans le plan (les direction A,B,C -
§2.1.7 – table figure 2.15), mais pour la distance D (diagonale dans l'espace de coordonnés x, y, z )
l'erreur est de seulement 3%.
2.3. La Description de formes La description de formes est une étape importante en analyse d'images de l’espace. Si l'objet a une
forme simple, par exemple une silhouette compacte ou une frontière convexe, sa description peut être
donnée en termes géométriques comme l'aire, le périmètre, le facteur de forme, les moments, etc. Ces
traits sont parfois suffisants pour classifier, mais non pour décrire de façon appropriée une forme
complexe, de frontière non convexe et pouvant être perçue comme l'union de régions simples. Dans ce
cas, il vaut mieux suivre une approche structurelle.
La notion de squelette comme représentation structurale est intuitive; il s'agit de modéliser, dans
l'espace continu, l'intersection d'un front d'onde partant du bord d'un objet, de façon à obtenir une
représentation filiforme de l'objet [Chassery, 1991].
Les propriétés majeures que l'on attend du squelette sont au nombre de trois : i) centré 1, ii) homotope,
et iii) réversible. L'homotopie signifie que l'image et son squelette ont le même nombre de composantes
connexes, et pour chacune d'entre elles, le même nombre de trous. Centré dans la forme, le squelette

Chapitre 2. La Géométrie Discrète et la Description de Formes - 57
fournit une représentation monodimensionnelle équivalente à l'objet. La description de l'objet peut alors
se faire entièrement à travers celle du squelette, qui possède toute l'information synthétisée sous forme
de valeurs de distances.
Le calcul du squelette est une opération difficile. Ce calcul, quasiment impossible dans l'espace continu,
conduit à trois familles de méthodes :
¤ A partir d'une polygonalisation du contour, une formulation analytique en segments de droites et en
arcs de paraboles est déduite [Martinez, 1987];
¤ Une autre méthode semi-continue prend comme entrée un échantillonnage du contour, où l’on calcule
le diagramme de Voronoï [Bertin, 1994], duquel on extrait un squelette sous forme de graphe [Attali,
1994].
¤ Quant à la famille de méthodes dédiées à l'espace discret, on distingue les squelettes binaires,
(résultats d'un calcul itératif) et des squelettes pondérés (construits sur une image de distance)
[Montanvert, 1987; Chassery, 1991].
Les méthodes de calcul des squelettes binaires sont fondées sur la suppression itérative de points du
contour. Les points à supprimer sont détectés par analyse de leur voisinage, en faisant intervenir la
plupart du temps des masques de détection. Le squelette pondéré est généralement considéré comme
une bonne représentation de formes binaires lorsque leur épaisseur varie ou est non négligeable, et il
est utilisé comme un puissant outil pour la décomposition et la description de formes [Pieritz, 1994;
Thiel, 1994].
2.3.1. Modèles de représentation en 2D La description de formes nécessite des méthodes pour extraire les caractéristiques importantes des
objets présents dans une image. Un objet binaire est un ensemble de points qui, pris séparément, ne
donnent pas d'information pertinente. C'est pourquoi les objets sont fréquemment représentés par leur
contour. Une alternative intéressante consiste à rechercher un "axe de symétrie généralisée" dans la
forme, appelée "axe médian" [Blum, 1967].
2.3.1.1. L'axe médian Dans l’espace l’axe médian est un concept qui fait intervenir le recouvrement d’un objet par des
éléments géométriquement connus, de manière à accéder à une représentation minimale d’une image.
Par exemple, voici schématisé figure 2.27, l'axe médian recouvrant une forme par des cercles
euclidiens.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 58
Fig. 2.27 - Axe médian obtenu avec des cercles.
Dans l’espace discret à n dimension, la définition de l’axe médian est :
Définition 2.3 (Axe médian) L'axe médian, noté AM, est le lieu des centres des boules maximales dans
la forme.
Définition 2.4 (Boule maximale) Une boule est dite maximale dans la forme si elle n'est complètement
incluse dans aucune autre boule. Une telle boule peut cependant être incluse dans l'union de plusieurs
autres.
Dans une image comprenant un ensemble O de points objets (avec le fond F) codés avec une distance
d, une boule discrète Bd(P,r) de centre P et de rayon r est définie par :
( ) ( ) rQPdQrPBd ≤= ,:, (2.30)
Ainsi, l’axe médian, noté AM(O), est alors caractérisé par :
( ) )( Q, R B) ( P, RO, B Q O AMP QdPd ⊄∈∀⇔∈ (2.31)
L'image de distance DM est une des premières approches utilisées pour donner une structure à une
image binaire, et pour identifier ses propriétés. En effet, pour une distance donnée, les boules
considérées sont des disques de rayons différents (équation 2.32).
( ) Qp RP, R Q O AMP ≥∀⇔∈ de voisins-i (2.32)
L’identification des boules maximales, pour les approximations de distances présentées, est faite à
partir de la caractérisation des "maxima locaux".

Chapitre 2. La Géométrie Discrète et la Description de Formes - 59
2.3.1.2. Maxima locaux Considérons un masque de chanfrein (xi, yi, wi). Dans la carte de distance DM calculée sur forme X,
chaque point p reçoit l’information de distance de l’un au moins de ses voisins ni(p) (sur le masque).
Tout voisin de ce type est placé sur un chemin minimal, constitué uniquement de déplacements permis
du fond à p. De même, le point p peut propager l’information de distance à certains voisins, qui sont
plus internes dans l’objet que p. Lorsqu’une telle propagation a lieu d’un point p à un voisin ni(p), alors
ni(p)=p+wi.
Définition 2.5 (Maximum local) On appelle maximum local un point p qui ne propage l’information de
distance à aucun de ses voisins, c’est-à-dire
( ) iwppn ii ∀+< (2.33)
Un maximum local p peut avoir des voisins plus grands que lui, mais ils reçoivent leurs poids depuis
d’autres points, plus petits que p. Pour d4 et d8, les maxima locaux coïncident exactement avec l’axe
médian.
Pour des distance de chanfrein cette condition n’est plus exacte, car elle peut sélectionner des centres
de boules non maximales appelées points redondants ou pseudo-maximums locaux (ils ne sont pas
nécessaires pour retrouver la forme originale).
Le problème de points redondants est résolu en recherchant dans son voisinage de pondération ni(p)
l’existence d’un point q∈X , dont le disque recouvre complètement celui de p. Dans ce cas, la présence
de q interdit à p d’appartenir à l’axe médian.
Pour toute valeur de p, on doit connaître les valeurs minimales de ces voisins q, qui sont stockées
chacune dans une "table de correspondance" LUTi pour la distance dC calculée avant [Thiel, 1994].
Alors
( ) ii LUTpniAMp <∀⇔∈ , (2.34)
Pour la suppression des faux maximums, le résultat de cette table de correspondance pour la d34 fait
que les valeurs de distance 3 deviennent 1 et les valeurs 6 deviennent 5 (figure 2.28). Pour d’autres
métriques, la table de correspondance doit être recalculée.
3 3 3 3 3 1 1 1 3 6 3 6 1 5 1 5 3 3 3 3 3 1 1 1 a b c d
Fig. 2.28 - L’axe médian pour l’image (a) avec les pseudo-maximum (b) et après correction par la LUT (c,d)

Chapitre 2. La Géométrie Discrète et la Description de Formes - 60
2.3.1.3. Réversibilité L’axe médian AM est par la position des centres, et le rayon des boules maximales. Cette information
est suffisante pour retrouver la forme, car elle correspond à un recouvrement. L’axe médian joue donc
aussi un rôle pour la compression de données. Le retour à la forme initiale à partir de AM est aisé,
grâce à l’algorithme de transformation inverse de distance du §2.1.5. Celui-ci a été conçu pour que
chaque point de l’axe médian génère le disque associé à son poids, en deux passages séquentiels
globaux sur l’image.
2.3.1.4. Propriétés de l’axe médian L’axe médian caractérisé pour les distances de chanfrein possède un certain nombre de propriétés,
classiques ou moins connues, que nous énumérons ici.
Réversibilité : L’axe médian correspond à un recouvrement de la forme par des boules de la métrique
choisie. Pour retrouver la forme initiale, il suffit de régénérer les boules, connaissant leur position et leur
rayon.
Codage : La simplicité du stockage et du décodage de l’axe médian en font une propriété appréciable
dans le maniement des images binaires. L’utilisation de cette forme de codage est facilitée par
l’indépendance de l’axe médian par rapport à la position de la forme dans l’image.
Stabilité : L’application de la transformation de distance inverse à un axe médian génère la forme
originale d’un objet, où les points sont étiquetés souvent de manière différentes à l’étiquetage de
l’image de distance de départ, car les labels proviennent des poids de AM, et non plus de point du fond.
Déconnexion : Une propriété essentielle de l’axe médian est sa déconnexion. Elle distingue l’axe
médian discret des squelettes continus, qui sont simultanément connexes et réversibles. Cette
déconnexion limite l’exploitation de l’axe médian, qui ne respecte pas l’homotopie de la forme. La
principale origine de cette déconnexion est l’existence de directions préférentielles de non propagation
de l’information du bord aux éléments à l’intérieur sur la carte de distances, appelles "cônes d’influence"
est abordée en [Thiel, 1994; 1991].
Epaisseur : On remarque également que l’axe médian peut comporter localement une certaine
épaisseur, due par exemple à un diamètre pair de la forme.
2.3.1.5. La ligne médiane Les squelettes sont significatifs de la forme de l’objet aminci, mais non réversibles, et les axes médians
sont des codages exacts centrés dans l’objet, mais non connexes. Un autre concept proposé dans la
littérature est celui de la ligne médiane obtenue sur les distance au fond DM. Ce concept est utilisé de
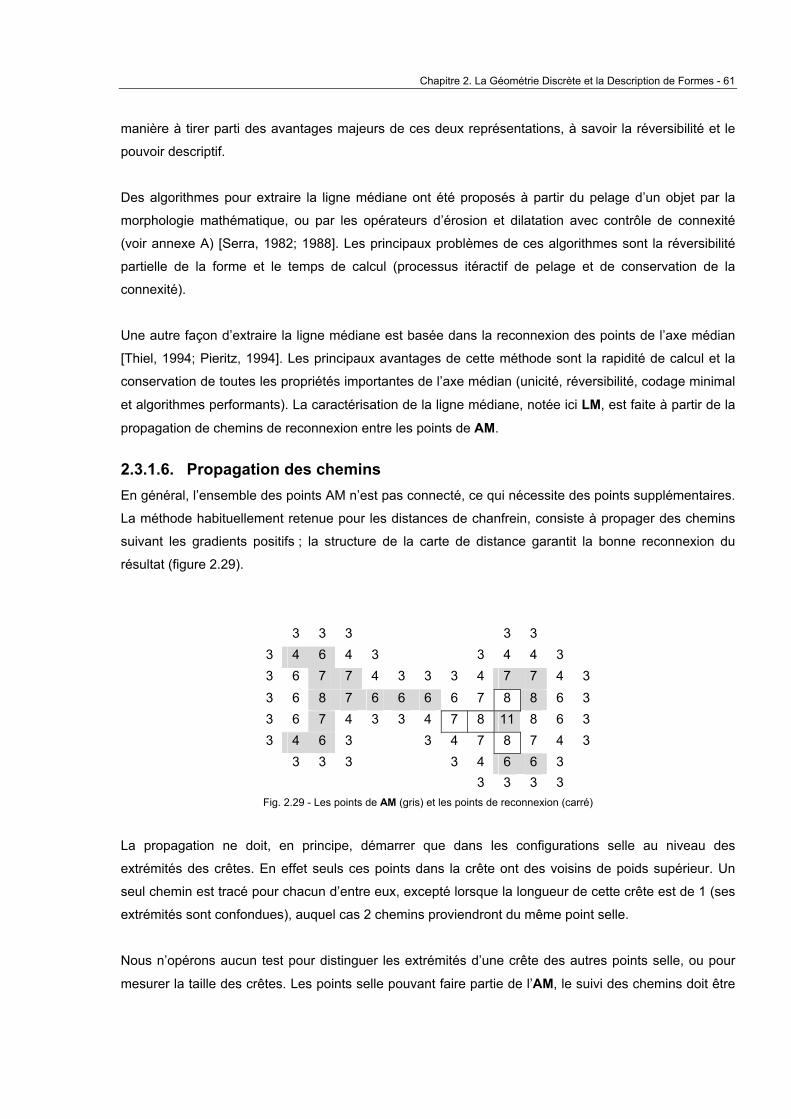
Chapitre 2. La Géométrie Discrète et la Description de Formes - 61
manière à tirer parti des avantages majeurs de ces deux représentations, à savoir la réversibilité et le
pouvoir descriptif.
Des algorithmes pour extraire la ligne médiane ont été proposés à partir du pelage d’un objet par la
morphologie mathématique, ou par les opérateurs d’érosion et dilatation avec contrôle de connexité
(voir annexe A) [Serra, 1982; 1988]. Les principaux problèmes de ces algorithmes sont la réversibilité
partielle de la forme et le temps de calcul (processus itéractif de pelage et de conservation de la
connexité).
Une autre façon d’extraire la ligne médiane est basée dans la reconnexion des points de l’axe médian
[Thiel, 1994; Pieritz, 1994]. Les principaux avantages de cette méthode sont la rapidité de calcul et la
conservation de toutes les propriétés importantes de l’axe médian (unicité, réversibilité, codage minimal
et algorithmes performants). La caractérisation de la ligne médiane, notée ici LM, est faite à partir de la
propagation de chemins de reconnexion entre les points de AM.
2.3.1.6. Propagation des chemins En général, l’ensemble des points AM n’est pas connecté, ce qui nécessite des points supplémentaires.
La méthode habituellement retenue pour les distances de chanfrein, consiste à propager des chemins
suivant les gradients positifs ; la structure de la carte de distance garantit la bonne reconnexion du
résultat (figure 2.29).
3 3 3 3 3 3 4 6 4 3 3 4 4 3 3 6 7 7 4 3 3 3 4 7 7 4 3 3 6 8 7 6 6 6 6 7 8 8 6 3 3 6 7 4 3 3 4 7 8 11 8 6 3 3 4 6 3 3 4 7 8 7 4 3 3 3 3 3 4 6 6 3 3 3 3 3
Fig. 2.29 - Les points de AM (gris) et les points de reconnexion (carré)
La propagation ne doit, en principe, démarrer que dans les configurations selle au niveau des
extrémités des crêtes. En effet seuls ces points dans la crête ont des voisins de poids supérieur. Un
seul chemin est tracé pour chacun d’entre eux, excepté lorsque la longueur de cette crête est de 1 (ses
extrémités sont confondues), auquel cas 2 chemins proviendront du même point selle.
Nous n’opérons aucun test pour distinguer les extrémités d’une crête des autres points selle, ou pour
mesurer la taille des crêtes. Les points selle pouvant faire partie de l’AM, le suivi des chemins doit être

Chapitre 2. La Géométrie Discrète et la Description de Formes - 62
effectué pour tout point de l’AM ou pour tout point selle. Soit p un tel point, N(p) contient au plus 2
composantes 8-connexes de points plus grands que p, desquels un chemin ascendant peut être
commencé. Pour chaque point de la composante courante, le gradient est calculé. Le voisin ni(p) qui
maximalise le gradient dans sa composante est marqué comme premier point du chemin. De là, les
voisins nk(ni(p)) sont inspectés pour trouver le prochain point (plus grand que ni(p)), nécessairement
unique, qui continuera le chemin. Le tracé du chemin se poursuit sur le plus grand gradient, tant que
des points possédant un gradient positif sont trouvés.
(a) (b)
Fig. 2.30 - L’axe médian (a) et la ligne médiane (b) pour les objets grises.
2.3.1.7. Graphe de la ligne médiane Le pouvoir descripteur d’un squelette dans l’espace montre le rapport entre l’organisation de la structure
et la forme. Cette possibilité permet la construction d’un graphe de représentation de formes à partir de
la ligne médiane, appelé "graphe de la Ligne Médiane", dénommée GLM.
La première approche pour le GLM a été proposée par [Montanvert, 1987], où seulement d4 et d8 ont
été explorées dans un algorithme de recherche de configurations de voisinages. A partir de modelés de
connexion, l’algorithme recherche dans tous les points de la LM (sur l’image de la carte de distances
DM) pour extraire les objets centraux de la forme, dénommés "nœuds" et les "arcs" qui sont
caractérisés par un parcours sur les éléments restants. Les principaux problèmes de cette formulation
sont la non généralité pour d’autres distances et dimensions, la non unicité de la solution, le parcours
interactif de toute l’image et la conservation de la DM pour analyse (grande quantité de données).
Une nouvelle approche pour le GLM, appelée "Graphe de la Ligne Médiane Généralisée" GLMG, a été
proposée par [Pieritz, 1994], détaillée dans l’annexe B [Pieritz, 1995], où seuls les points de LM sont

Chapitre 2. La Géométrie Discrète et la Description de Formes - 63
explorés. La méthode est basée sur la recherche de maxima locaux absolus et de minima locaux
absolus (le point peut satisfaire les deux conditions) dans le 8-voisinage d’un point sur LM pour
caractériser les centres de nœuds. Les 8-voisins sur la ligne médiane sont pris comme des éléments du
nœud pour éviter la formation des arcs redondants. Les points restants, forment les arcs de connexion.
Un troisième élément a été introduit : l’arc entre nœuds (voir annexe B).
Maxima locaux absolus :
( ) ( ) Qp RRP, OLM Q OLMPsi ≥∈∀⇔∈ de voisins-i (2.35)
Minima locaux absolus :
( ) ( ) Qp RRP, OLM Q OLMPsi ≤∈∀⇔∈ de voisins-i (2.36)
Les principaux avantages de cette méthode sont la formulation générale pour toutes les distances et
dimensions, l’unicité de solution et la rapidité de calcul. Dans la figure 2.31.b, est présenté le GLMG
avec les nœuds et les arcs (en couleur blanche) dans l’espace.
(a) (b)
Fig. 2.31 - Le graphe de la ligne médiane généralisée (a) et la visualisation de la structure dans l’espace (b)
2.3.2. Modèles de représentation en 3D Etant donné la taille des données nécessaires à la mémorisation d’un volume sous forme matricielle,
divers modèles de représentation des volumes ont été développés. On retrouve les modes de
Chapitre 2. La Géométrie Discrète et la Description de Formes - 64
représentation utilisés en 2D ; deux approches sont généralement utilisées : soit une approche de type
surface (contour), soit une approche de type volume (région).
Les approches de type surface tentent de modéliser le volume par l’intermédiaire de sa surface,
généralement par facettes, chacune de ces facettes pouvant être une surface plane (triangle ou
carreau) ou une courbe paramétrique. Ces différentes méthodes permettent, en ne stockant que le
contour, d’obtenir des représentations dont le volume de données n’est pas trop important. Elles
fournissent une description assez naturelle des volumes. Ces descriptions facilitent les transformations
géométriques telles que les rotations et translations ; ce sont d’ailleurs ces méthodes de représentation
qui sont largement utilisées en infographie et en conception assistée par ordinateur. Ces méthodes sont
basées sur des structures arborescentes, dont les principales sont les arbres CSG (Constructive Solid
Geometry), les octrees, les arbres multiples (décomposition de l’espace jusqu’à ce que chaque
composante soit homogène) et la realité virtuelle (VRML ‘Virtual Reality Meta Language’ - codage des
mondes virtuels sur internet).
La représentation par surface ne permet pas de distinguer le plein du vide ce que rend difficile et même
impossible certains calculs de volume, de masse ou l’élimination de parties cachées. Cette modélisation
ne permet d’ailleurs pas de donner un sens physique aux objets construits.
Les approches par volume modélisent l’ensemble du volume par répartition ou recouvrement de l’objet
à l’aide de volumes élémentaires. L’idée générale du squelette est la même qu'en 2D, il s’agit de
représenter un volume à l’aide d’une structure "mince" mais ayant, autant que possible, les mêmes
propriétés topologiques. Ce modèle de représentation doit être mince selon au moins l’une des trois
directions de l’espace (une épaisseur de deux voxels est permise dans le cas où l’objet est d’épaisseur
paire) et centré (à un voxel près) dans l’objet. L’approche la plus simple est basée sur l’extraction de
l’axe médian, défini par le plan dans la section §2.3.2.1, et elle est utilisé dans l’ensemble de ce travail.
2.3.2.1. Axe médian Il est défini, de la même manière qu’à 2D, comme étant le lieu des centres de boules maximales
incluses dans l’objet (équation 2.30, 2.31 et 2.32). L’ensemble de ces centres forme une surface
déconnectée (figure 2.32).
Le processus de calcul et d’extraction de l’axe médian 3D, nommé ici AMV, pour l’espace discret est
fondé sur un calcul de distance au fond VDM (§2.2.4), suivi d’une extraction des maximas locaux
(§2.1.1.1). Comme dans le plan pour la distance d34 , la définition 2.4 pour le volume discret peut
sélectionner des centres de boules non maximaux.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 65
(a) (b)
Fig. 2.32 - L’axe médian 3D (b) pour une sphère (a).
Le problème des pseudo-maximums dans le volume est résolu pour d345 à partir de la définition 2.5
(calcul des sphères de recouvrement - table de correspondance LUTi), où seulement le valeur de
distance 3 doit être remplacée par la valeur 1. Dans la figure 2.33, l’axe médian 3D obtenu avec la
correction de distance présentée. Pour d’autres distances, la LUT doit être recalculée.
(a) (b)
Fig. 2.33 - L’axe médian 3D pour la sphère (a) obtenue sans LUT (b) et avec l’application de la LUT (figure 2.34) pour la distance d345
L’axe médian définit un recouvrement de l’objet par des boules de taille maximale. Lors du calcul de
l’axe, les tailles des boules dont les centres constituent l’axe médian sont mémorisées. Comme dans le
plan, la transformation est alors réversible et les propriétés dans le volume sont les mêmes qu’au
§2.3.1.4, soit : réversibilité, codage, stabilité, déconnexion et épaisseur (figure 2.35)

Chapitre 2. La Géométrie Discrète et la Description de Formes - 66
Fig. 2.34 - L’axe médian 3D avec l’application de la LUT
pour le volume de la fig.2.33.a - distance d345
(a) (b)
Fig. 2.35 L’axe médian discret (avec d345) (b) pour un cube (a) (largueur 24 voxel dans un volume 32x32x32 voxel – d345)
Pour un ensemble connexe (figure 2.36), où les sphères de rayon 8 voxel sont connectées par
l’interférence d’un seul voxel dans la direction des axes coordonnées, l’axe médian identifie les
éléments de connexion et les centres géométriques des sphères.
L’axe médian dans l’espace discret Z3 borné est très sensible à l’interférence des objets du volume au
frontières, où le résultat est un axe médian plus complexe (Figure 2.37). La perturbation dans la forme
de l’axe est fonction de la propagation de l’information du bord jusqu’à l’intérieur du volume par la carte
volumique de distance VDM, très sensible au rapport entre la taille du volume et de la frontière.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 67
(a) (b)
Fig. 2.36 - L’axe médian (b) pour un ensemble de boules connectées (a) de rayon 8 voxel dans un volume 32x32x32 voxel – d345
Une deuxième source de perturbation dans la détermination d’un axe médian mince est le rapport de
taille entre les bruits de surface et la taille représentative du volume. Dans le volume, les petits
protubérances dans les surfaces ne sont pas traduites pour les petits rayons (sur le VDM – proche de la
surface) mais pour les grands rayons. Pour les volumes avec un rayon important et une surface très
perturbée l’axe médian devient un élément avec plusieurs voxels d’épaisseur.
L’axe médian dans le volume est plus robuste du point de vue de la connexion de ces éléments (figure
2.35 – l’axe médian d’un cube) en fonction de la meilleur couverture de l’espace par les masques de
chanfrein qu’en 2D, traduit par les ‘cônes d’influence dans le plan' [Thiel, 1994]. Pour le volume, les
cônes d’influence sont minimisé par l’existence de deux diagonales dans le masque de chanfrein, avec
une erreur absolue plus petite pour la deuxième (§2.2.2.10). Ainsi, les boules en 3D on un pouvoir
descriptif de couverture de la forme plus important que les cercles en 2D.
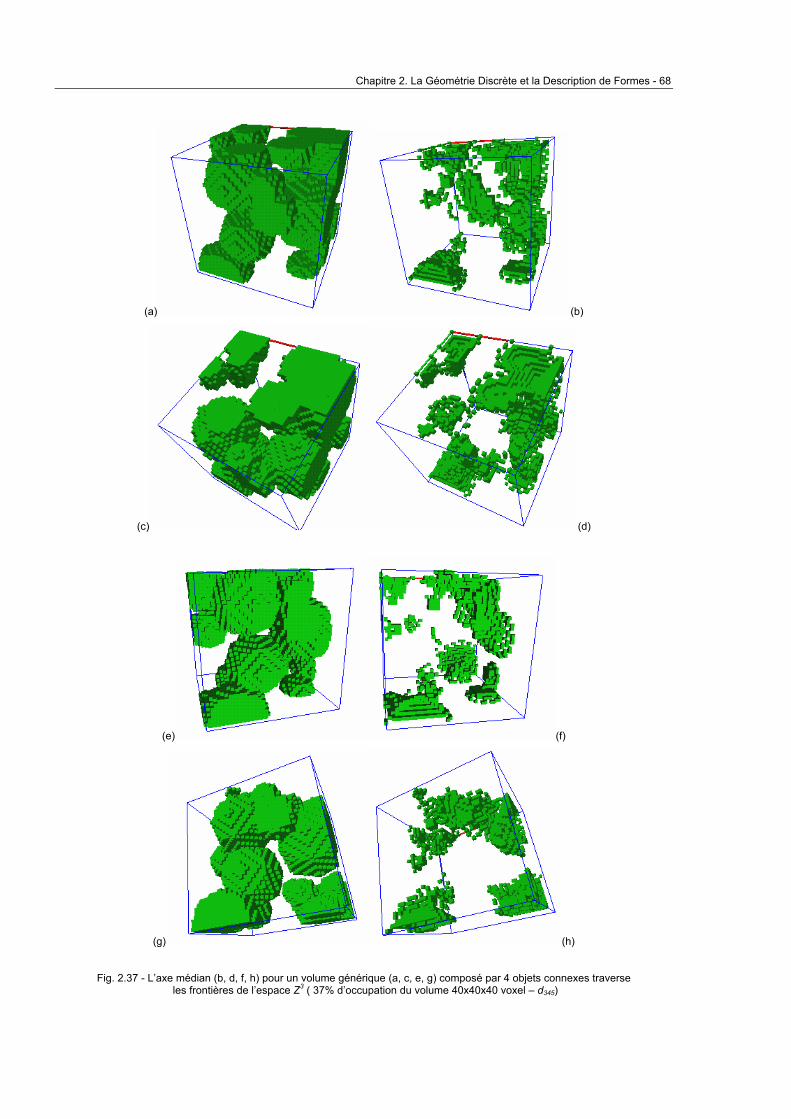
Chapitre 2. La Géométrie Discrète et la Description de Formes - 68
(a) (b)
(c) (d)
(e) (f)
(g) (h)
Fig. 2.37 - L’axe médian (b, d, f, h) pour un volume générique (a, c, e, g) composé par 4 objets connexes traverse les frontières de l’espace Z3 ( 37% d’occupation du volume 40x40x40 voxel – d345)

Chapitre 2. La Géométrie Discrète et la Description de Formes - 69
2.3.2.2. Surface médiane
L’axe médian n’est pas nécessairement connexe ni dans le plan ni dans l’espace. La reconnexion des
points de l’axe médian 3D permettre obtenir un squelette connecté et centré dans la forme, appelé
surface médiane - LMV (l’équivalent de la ligne médiane en 2D) [Rolland, 1994; Marion-Poty, 1994;
Fernandez-Vidal, 1996](figure 2.38).
(a)
(b) (c)
(d) (e)
Fig.2.38 - La surface médiane (a) pour le volume de la fig.2.36.a, et (b, c, d, e) pour le volume
de la fig. fig.2.37.a - pour la distance d345

Chapitre 2. La Géométrie Discrète et la Description de Formes - 70
L’approche d’extraction des points de LMV à partir des points déconnectés de AMV est le même que
dans le plan (§2.3.1.6): propager les chemins de reconnexion suivant les gradients positifs. A partir d’un
élément de l’axe médian déconnecté, les gradients positifs sur la carte de distances VDM dans les 26-
voisinages sont identifiés et explorés jusqu’à la complète reconnexion. Le nombre de tests pour un point
dans l’espace Z3 est plus important qu’un 2D mais le temps de calcul global n’est pas trop élevé en
fonction de la presque connexion de toutes les éléments de l’axe médian dans le volume.
2.3.2.3. La Surface Médiane Normale aux Bords - LMVn La sensibilité de l’axe médian aux frontières du volume est traduite par une épaisseur plus importante et
des déformations (figure 2.38.b), celle-ci est minimisée par l’introduction d’une frontière placée à l’infini
pour la phase analysée Le déplacement de la frontière à l’infini pour l’espace Z3 est la génération de la
propagation des objets sur les bords dans la direction normale aux frontières sur une longueur finie. La
longueur adoptée est fonction du diamètre moyen de l’intersection des objets avec les bords. La figure
2.39 est présente la propagation de la frontière pour la phase de couleur blanche sur le plan (cas 2D)
pour un rectangle et une géométrie quelconque, où la LM obtenue normale aux frontières est appelée :
ligne médiane normale, notée ici LMn.
(a) (b) (c)
(d) (e) (f)
Fig.2.39 - La LM d'un rectangle blanc inscrit dans l'image 2D (a), la LMn (c) pour le rectangle obtenue par le déplacement
de la frontière (b), la LM d'une géométrie (d), le déplacement de la frontière (e) et la LMn résultante (f) – distance de chanfrein d34
La méthode de déplacement de la frontière dans le 3D est la même que pour le plan, où les bords sont
propagés selon une distance finie. Dans la figure 2.40 est présentée la surface médiane volumique

Chapitre 2. La Géométrie Discrète et la Description de Formes - 71
normale aux bords, ici notée LMVn, pour le volume présenté dans la figure 2.37.a.
(a) (b)
Fig.2.40 - La LMVn (a, b) pour le volume de la fig. 2.37.a
La LMVn représente un filtrage des effets de bord du volume sur les objets et permet d’avoir une
représentation perpendiculaire au bord des opérateurs squelettes. Cette propriété d’orthogonalité sera
explorée au chapitre §4 pour la simulation de transferts dans le volume.
2.3.2.4. La Surface Médiane Filtrée LMVF – Filtre Topologique La description de formes par les opérateurs géométriques structuraux présentés respectent les
propriétés de l’homotopie et la réversibilité de forme, mais ne respectent pas toujours la propriété
d’épaisseur minimale. En effet, la propriété de réversibilité est liée à l’épaisseur de l’axe médian,
fonction du recouvrement de la forme par les sphères discrètes (§2.3.2.1), et par conséquent
interprétation des bruits de la surface.
Un filtrage topologique de la LMV est proposé, basée sur la conservation de l’homotopie de la forme,
fonction des notions de courbe et de composantes connexes. Le processus interactif est basé sur la
suppression des éléments non nécessaires pour conserver le nombre d’Euler initial e0 de chaque
composante connexe (section §2.2.2.1), à partir du plus petit rayon jusqu’au plus grand sur le squelette.
Pour un composant connexe Cn de l’ensemble Y des squelettes du volume, on vérifie que le point
candidat Pi est conservé s’il satisfait la condition
( ) ( ) YCCPCPPPCePPPCe ninininininnin ∈⊄⊂⇒≠ −−− avec et ,...,,...,,..., 000 (2.36)

Chapitre 2. La Géométrie Discrète et la Description de Formes - 72
(a) (b)
(c) (d)
Fig.2.41 - La surface médiane filtrée LMVF (a, c) et la LMVFn (normal) (b,d) pour le volume de la fig.2.38.a, avec quatre composantes connexes - distance d345
Dans la figure 2.41.a est présentée la LMV filtrée par le squelette de la figure 2.38.b, notée ici LMVF, où
l’homotopie de la forme est conservée mais la LMVF ne permet pas retrouver le volume complet après
la transformation inverse du squelette (figure 2.42). On observe que le principal problème est la
reconstruction des éléments du bord.
L’application de l’opérateur de filtrage topologique sur la LMVn, noté ici LMVFn, permet l’obtention d’un
volume avec un degré de reconstruction effectif amélioré. Dans la figure 2.42, le profil de volume2
reconstruit par la LMV est de 37% (taux effective d’occupation), pour la LMVFn il est de 35% et pour
LMVF il est seulement de 26%. Effectivement, l'utilisation de la LMVFn pour la représentation complète
du milieu dans une modélisation géométrique d'un processus de transfert (chapitre §4)3 est limitée par
le dégré de réversibilité de la forme, mais la LMVFn permet l'identification d'une abstraction graphique
2 Le profil de volume représente le taux d'occupation d'une phase par section (dans le cas XY rapporté à la direction de la profondeur Z ). 3 Le squelette utilisé pour la simulation géométrique d'un processus d'invasion dans le chapitre §4 est la LMVn, en fonction de la complète représentation de la forme (réversibilité) et l'orthogonalité aux bords.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 73
(section §2.3.2.5) améliorée du point de vue de la vitesse d'exécution, de la simplicité d'analyse et de
l'orthogonalité aux frontières.
0
20
40
0,0 0,5 1,0Surface de la section XY
Prof
onde
ur Z
(vox
el)
LMVFnLMVLMVF
Fig.2.42 - Comparaison entre le profil du volume reconstruit par
la transformation inverse des LMV, LMVF et par la LMVFn, pour le squelette de la figure 2.37.a. (1,0 corresponde à la taille maximale 40x40 voxels)
2.3.2.5. Graphe de la surface médiane généralisé Comme dans le plan, la forme représentée par LMV peut être décrite par le GLMG adapté au volume.
La formulation dans l’espace pour la description graphique GLMG est la même que dans le plan
(§2.1.3.7), ce qui signifie que l’on recherche, dans le n-voisin sur la LMV d’un point, le maximum local
absolu ou le minimum local absolu pour caractériser les nœuds (équations 2.35 et 2.36). Les points
restant sur la surface médiane, caractérisent les arcs. Dans la figure 2.43.a, le GLMG en 3D représente
les nœuds et les arcs pour les 26 boules connectées du squelette LMV de la figure 2.36.a.
Le GLMG du squelette filtré (pour LMVFn - figure 2.43.b) a l’avantage d’être aussi orthogonal aux bords
est adapté directement aux formulations de transfert avec une complexité réduite, en fonction de la
suppression de connexions redondantes. Ainsi, le principal avantage de la représentation hiérarchique
du GLMG est la possibilité de manipuler l’information volumique (ou de la forme dans le plan) à travers
une matrice associée au graphe, toujours carré.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 74
(a)
(b) (c)
Fig.2.43 - Le GLMG pour la LMV de la fig.2.36.a (a) et pour la LMVFn de la fig.2.41.b (b, c)
(distance d345 - centre des nœuds et des arcs).
2.4. Synthèse du chapitre Le chapitre a introduit les concepts de base de la géométrie adaptée au monde numérique, appelée
"géométrie discrète". Ces concepts explorent les contraintes de la représentation numérique de
l’espace et proposent des algorithmes très performants pour le codage des formes (vitesse et
simplicité).
L'analyse de l’espace 2D a d'abord été introduite avec ses concepts fondamentaux, et ensuite les
notions dans l’espace de dimension supérieure (3D). Les contraintes de chaque approximation de la
distance euclidienne à des distances de chanfrein sont analysées, avec leurs qualités intrinsèques et
leurs potentialités. Les concepts du cercle et de la sphère discrète sont présentés, basés dans les
approximations par les distances de chanfrein (et voisinages respectifs) avec les erreurs
caractéristiques.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 75
L’approximation par la distance de chanfrein d34 (dans le 2D) et par d345 (dans le 3D) a été retenue pour
l’ensemble des développements de ce travail en fonction de leurs similitudes (forme) et conséquente
rapidité de calcul.
Les concepts de la géométrie discrète présentés permettent de mettre en œuvre les techniques de
représentation de la forme basées sur des objets élémentaires, dans le cas du cercle (pour l’espace
2D) et de la sphère pour l’espace 3D. Un objet est décrit par les opérateurs géométriques centrés dans
la forme ou dans le volume, dépendant de la dimension d’analyse. Les opérateurs structuraux plus
connus sont les squelettes n-dimensionnels qui peuvent avoir une formulation discrète basée sur la
métrique et sur la relation de voisinage dans l’espace.
La représentation la plus simple d’un squelette est l’opérateur axe médian, qui dans sa formulation
discrète est utilisé comme un outil de compression de l’information image (2D), ou du volume (3D). La
principale propriété de l’axe médian est la conservation de l’information morphologique sans être
complètement connecté. La formulation algorithmique présentée pour l’extraction des maxima locaux a
pour principale avantage (par rapport aux méthodes classiques de pelage itéractif) la rapidité de calcul
due à un seul parcours des données.
Le concept d’une ligne médiane LM et LMV centrée dans la forme mais connectée est présenté, basé
sur la reconnexion des points de l’axe médian. Le squelette discret LM a comme principal propriété la
conservation de la morphologie avec la conservation de la topologie. Deux techniques d’amélioration de
la LMV sont introduites : le concept d’un squelette orthogonal aux bords du volume (LMVn) et une
opération de filtrage topologique - LMVF.
La description de formes basés dans les opérateurs squelettes est complétée par la représentation du
graphe de ligne médiane généralisé, où l’objet, décrit par le squelette, est décomposé et analysé à
partir de géométries de base. La description graphique de la forme et/ou du volume à partir du GLMG
est unique dans sa dimension caractéristique, et permet de mettre en relation le plan et le volume.
Les opérateurs mathématiques discrets permettent l’étude et la mise enouvre de méthodes
performantes d’analyse de la forme pour les milieux poreux, qui pourront prendre en compte les
géométries réelles, telles que les milieux fissurés. Dans chapitre 3 seront formulés et caractérisés les
échantillons numériques et expérimentaux pour les développements de ce travail.

Chapitre 2. La Géométrie Discrète et la Description de Formes - 76

Chapitre 2. La Géométrie Discrète et la Description de Formes - 77
LA GEOMETRIE DISCRETE ET LA DESCRIPTION DE FORMES............................................................35
2.1. INTRODUCTION ..........................................................................................................................................37
2.2. LA GEOMETRIE DISCRETE..........................................................................................................................37
2.2.1. Définitions et notions de base en 2D – L’Analyse d’image ..............................................................38
2.2.1.1. Voisinages et connexité.............................................................................................................................38
2.2.1.2. Distances discrètes ....................................................................................................................................40
2.2.1.3. Distance Euclidienne.................................................................................................................................42
2.2.1.4. Distance de Chanfrein ...............................................................................................................................42
2.2.1.5. Carte de distances – schéma algorithmique...............................................................................................43
2.2.1.6. Transformation inverse..............................................................................................................................44
2.2.1.7. Les Cercles Discrets ..................................................................................................................................45
2.2.1.8. Taux d’erreur.............................................................................................................................................46
2.2.2. Définitions et notions de base en 3D – l’Analyse du volume ............................................................47
2.2.2.1. Voisinage, connexité et nombre d’Euler ...................................................................................................47
2.2.2.2. Distances discrètes dans Z3 - Distance Euclidienne...................................................................................49
2.2.2.3. Distance d6 ................................................................................................................................................50
2.2.2.4. Distance d26 ...............................................................................................................................................51
2.2.2.5. Distance d18 ...............................................................................................................................................52
2.2.2.6. Distances du chanfrein ..............................................................................................................................53
2.2.2.7. Volume de distances – schéma algorithmique...........................................................................................53
2.2.2.8. Transformation inverse..............................................................................................................................54
2.2.2.9. Les Sphères Discrètes................................................................................................................................55
2.2.2.10. Taux d’erreur.............................................................................................................................................56
2.3. LA DESCRIPTION DE FORMES.....................................................................................................................56
2.3.1. Modèles de représentation en 2D......................................................................................................57
2.3.1.1. L'axe médian .............................................................................................................................................57
2.3.1.2. Maxima locaux..........................................................................................................................................59
2.3.1.3. Réversibilité ..............................................................................................................................................60
2.3.1.4. Propriétés de l’axe médian ........................................................................................................................60
2.3.1.5. La ligne médiane .......................................................................................................................................60
2.3.1.6. Propagation des chemins ...........................................................................................................................61
2.3.1.7. Graphe de la ligne médiane .......................................................................................................................62
2.3.2. Modèles de représentation en 3D......................................................................................................63
2.3.2.1. Axe médian ...............................................................................................................................................64
2.3.2.2. Surface médiane ........................................................................................................................................69
2.3.2.3. La Surface Médiane Normale aux Bords - LMVn.....................................................................................70
2.3.2.4. La Surface Médiane Filtrée LMVF – Filtre Topologique .........................................................................71
2.3.2.5. Graphe de la surface médiane généralisé...................................................................................................73
2.4. SYNTHESE DU CHAPITRE ............................................................................................................................74

Chapitre 2. La Géométrie Discrète et la Description de Formes - 78

Chapitre 2. La Géométrie Discrète et la Description de Formes - 79

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 91
3.3 Méthodologies d'analyse Comme dans l'espace Euclidien En, les méthodologies de mesure des paramètres géométriques
doivent être adaptées à la méthode d'analyse pour tenir compte de la spécificité du milieu avec ses
contraintes. Dans le cadre de ce travail, les outils informatiques développés sont basés sur les
distances pondérées §2, pour tirer parti du codage par entiers et de la performance informatique qui en
résulte.
Selon les paramètres d’intérêt, les outils sont divisés en deux catégories : morphologiques et
topologiques.
3.3.1 Mesures Morphologiques
Les mesures développées sur la forme sont classifiées comme mesures morphologiques parce qu’elles
ne reproduisent pas le rangement dans l’espace des objets. Selon la phase à laquelle on s'interesse,
sont effectués la mesure de la porosité, de la distribution granulometrique, du volume élémentaire et du
volume élémentaire d'un index de surface spécifique.
3.3.1.1 Porosité La porosité discrète εd dans l'espace Zn est définie par
( ) IVV ii id =⇒=∑ε (3.14)
c'est-à-dire, l'addition finie des voxels qui ont la même valeur I donnée par la fonction caractéristique
(éq.2.15), où
dsV ε−= 1 (3.15)
représente le taux d’occupation du volume pour la phase complémentaire, dans le cas du solide.
3.3.1.2 Granulométrie La distribution de taille des éléments ou granulométrie (selon la phase analysée), donne une première
idée de l'occupation de l'espace par les objets qui le composent. Dans le cas du vide, cette distribution
donne une information concernant la manière dont le transfert de masse pourra être réalisé.
Dans l'espace discrèt Zn, la distribution des est obtenue par des transformations effectuées à travers

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 92
des opérateurs de la morphologie mathématique (présentés dans l’annexe A), appelée "Opération
d'Ouverture".
L'ouverture de l'espace par des érosions et dilatations successives à travers des éléments structurants
est un processus itératif très coûteux du point de vue informatique, dû aux temps de calcul prohibitifs en
3D. La géométrie discrète, par le biais de pondérations de distance par les masques de chanfrein,
permet de raccourcir le temps nécessaire [Laurent, 1991; Moschetto, 1991; Peysson, 1992; Magnani,
1996], qui reste toutefois important.
Dans l'approximation de chanfrein pour l'espace Z3, l'élément structurant Bx est une sphère discrète
dont le volume peut être obtenue par l’opération inverse (éq.2.28 et éq.2.29) selon le rayon imposé.
L'érosion et la dilatation pour chaque itération sont effectués à partir de la carte de distance sur les
éléments de rayon inférieur au rayon courant. Comme dans Z2, la fonction de distribution sera donnée
par l'équation A.19.
0,0
0,2
0,4
0,6
0,8
1,0
0 5 10 15Rayon (voxel - pixel)
Dis
tr. C
umul
ée
Cercle2DSphère3D
Fig. 3.9 - Comparaison entre Granulométrie par ouverture 2D (cercle euclidien)
et 3D (sphère euclidienne) à travers de masques de chafrein.
Dans le cadre de ce travail, l’opération d'ouverture est réalisée en 3D et en 2D pour permettre la
comparaison directe entre les mesures morphologiques et topologiques qui seront développées. Ainsi,
dans la figure 3.9, la granulométrie par ouverture avec la distance chanfrein d345 est utilisée en 3D sur
une sphère1 de rayon 12 voxel, et comparée avec la granulométrie par ouverture avec la distance de
chanfrein d34 sur un cercle de rayon 12 pixel.
La granulométrie par la morphologie mathématique pourra être interprétée comme le recouvrement de
l'objet par des éléments structurants de tailles différentes (ex. la surface d'un carré mesurée par
1 La sphère et le cercle sont euclidiens (comme dans la figure 2.32.a) et la granulométrie par ouverture est faite par un élément structurant discret avec la masque de chanfrein d345 (en 3D) et d34 (en 2D).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 93
l'élément structurant cercle), jusqu'au remplissage de tout le volume (ou surface en 2D). Cela explique
l’apparition de plusieurs rayons dans la distribution de la figure 3.9, ainsi que des erreurs commises par
les approximations à la distance euclidienne par les distances de chanfrein (§2.2.1.8 et §2.2.2.10).
3.3.1.3 Volume élémentaire Comme introduit dans la section §1.3.2.2.1, la définition d'un volume élémentaire représentatif (VER),
est conditionnée par l'identification d'une dimension caractéristique ro, où une, ou plusieurs propriétés,
seront constantes. Pour la géométrie d'un milieu, la porosité est usuellement prise en compte comme
un des indicatifs.
La mesure discrète du longueur caractéristique pour un VER est réalisée à partir du centre de gravité
d'échantillon, par le changement incrémental de la dimension d'un domaine représentatif Dr de la forme
globale Dg, à partir de l'unité jusqu'à la longueur effective du volume. Pour chaque itération, la propriété
λ à laquelle on s'interesse est mesurée (dans notre cas le volume spécifique occupé - éq. 3.24). La
fonction obtenue donne une indication de la longueur à partir de laquelle la propriété devient constante
pour les échelles observées.
( )( ) ( )rDDDDV rgr
r
i i ,...,1 ,⊂∀⇒= ∑ λλ
(3.16)
3.3.1.4 Index de Surface Spécifique - ISS Un deuxième paramètre géométrique indicatif de l'existence d'un VER est la surface occupée par
l'interface considérée.
La mesure de la surface d'un objet est un domaine de recherche très important dans la géométrie
discrète (Borianne (1994)[23]), fonction de la difficulté qu'un processus volumique discret a pour
caractériser une géométrie dans une dimension inférieure. Dans le cas 2D, la frontière est représentée
par la longueur des éléments du bord, directement liée à la fonction de voisinage du pixel §2.1.2 et
caractérisée par la mesure des déplacements sur la carte de distances. Les éléments convexes ou
concaves sont directement caractérisés par des codages simples; la longueur effective est aussi
caractérisée. Pour l’espace Z3, le calcul de la surface demande des algorithmes très complexes utilisant
la détermination itérative d’enveloppe discrète [Chassery, 1991] pour chaque composant de surface,
composant qui est aussi très difficile à mesurer.
En Z3, le seul paramètre direct indicatif de surface est le déplacement minimal (rayon Rb d’une boule B)
défini par le masque de chanfrein dx utilisé, repéré sur la carte de distance volumique. Ainsi, l'index ix de

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 94
surface spécifique ISS est définit par
( ) min , RROBBi Bi ix =∈∀⇒=∑ (3.17)
où Vt est le volume total de l'échantillon.
Le VER de l'index de surface spécifique est obtenue à partir de l'algorithme présenté dans la section
§3.3.1.3, par le changement incrémental de la dimension d'un domaine représentatif Dr de la forme
globale Dg, depuis l'unité jusqu'à la longueur effective.
3.3.2 Mesures Topologiques
On appelle méthodes de mesure des paramètres topologiques les outils numériques qui mettent en
évidence la relation entre les objets d'un domaine et son arrangement dans l'espace. Ces méthodes de
mesure sont fonction d'un modèle structurel qui permet sa caractérisation selon un réseau organisé.
La représentation d'un volume, par un modèle structurel basé sur les squelettes et par le GLMG
( §2.3.1.7 et §2.3.2.5), permet la distinction entre les sites et les liens qui réalisent les connexions selon
un modèle de réseau comme dans la représentation par les réseaux de percolation (§1.3.1.4.3). Le
principal avantage est le développement d'une représentation qui respecte et conserve la vraie
géométrie du milieu, avec un traitement mathématique unique pour toutes les structures (fissures,
grains, etc.). Les mesures développées ici sont la fonction distribution de sites, la fonction distribution
de liens une fonction distribution topologique qui mettent en évidence le rangement entre les objets.
3.3.2.1 Distribution de Sites et Liens
La modélisation des phénomènes de transferts d'un milieu poreux est conditionnée par un modèle de
description de la structure spatiale, selon son rangement et forme. Plusieurs modèles de structure ont
été étudies (§ 1.4.1.4 - Modèles de simulation), pour lesquel la description de la structure par des sites
et liens (Théorie de la percolation § 1.4.1.4.3 - [Neimark, 1989; Kantzas, 1988] parmi d'outres) est la
plus proche (même intuitive) d'un concept de réseaux connectés. Les sites caractérisant les éléments
de l'espace poreux ont la contribution géométrique la plus importante (taille des objets) et le liens
représentent les structures de l'espace poreux qui permettent la connexion entre les sites, en général
avec une géométrie caractéristique de taille inférieure (figure 3.10).
La description d'une structure complexa par un opérateur géométrique du type squelette (LM - § 2.3.1
et § 2.3.2) permet l'extraction de son GLMG (§ 2.3.1.7 et § 2.3.2.5) avec une description du type
nœuds. Les nœuds peuvent être associes directement aux centres géométriques de sites et liens, et

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 95
ainsi à un modèle de réseaux connecté (figure 3.10).
Fig. 3.10 - La caractérisation d'un réseaux de pores par la LM (2D), la représentation de la structure par le GLMG et la modélisation par un réseaux de sites et de liens.
.
La représentation d'une structure par le GLMG est construite à partir de l'extraction des nœuds qui
représentent les centres géométriques principaux des objets composant la forme (éq.2.35 et éq.2.36).
Les objets non identifiés comme des nœuds sur la ligne (ou surface) médiane forment les arcs de
connexion. Une représentation hiérarchique de la structure du GLMG est construite par classification
des nœuds selon le rapport de connexion et les rayons caractéristiques.
Définition 3.1 (nœud central NC) : Un nœud est appelé un nœud central quand le point P est
connecté seulement à des nœuds de rayon inférieur, ou quand il est isolé (non-connecté), c'est-à-dire
( )( ) QP RRP,QOLMVNCP >∀⇔∈ deconnexion -i (3.18)
Définition 3.2 (nœud proéminence NP) : Un nœud est appelé un nœud de proéminence quand le
point P est connecté en même temps à des nœuds de rayon supérieurs, inférieurs ou égals, c'est-à-dire
( )( ) QP RouRP,QOLMVNPP ≤≥∀⇔∈ deconnexion -i (3.19)
Définition 3.3 (nœud connexion NCo) : Un nœud est appelé un nœud de connexion quand le point P
est connecté seulement à des nœuds de rayon supérieurs, c'est-à-dire
( )( ) QP RRP,QOLMVNCoP <∀⇔∈ deconnexion -i (3.20)
Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 96
Définition 3.4 (nœud strict NS) : Un nœud est appelé un nœud strict quand le point P est connecté
seulement à des nœuds de rayon supérieur par un seul arc, c'est-à-dire
( )( ) QP RR,PQOLMVNSP <=∀⇔∈ 1 deconnexion -i (3.21)
Dans le plan, une méthode de segmentation selon le GLMG (Pieritz (1994)[116] et (1995)[117])
(annexe B) permet la partition d'une forme en plusieurs objets à partir des nœuds de connexion. La
ligne médiane est segmentée en deux ensembles à partir de l'extraction des nœuds de connexion et de
la transformation inverse (§2.1.5) de chacun de ces ensembles : l'ensemble nœuds central, strict et de
proéminence plus les arcs; et l'autre, défini par les nœuds de connexion. La partition de la forme est
faite par comparaison de la valeur pour chaque pixel P entre les cartes de distance de l’image de liens
IMl reconstruite et l’image restant IM reconstruite, selon un critère défini par
)()()( PIMPIMOIMP ll ≥⇔∈ (3.22)
Ainsi, la surface de connexion (lien) est associée au rayon du nœud de connexion et la surface restante
représente les sites, chacun étant associée au rayon du plus grand nœud dans sa surface.
Le processus de segmentation dans l'espace 3D est développé de la même façon, selon l'identification
des nœuds de connexion sur le GLMG à partir de la surface médiane. Le volume occupé par les liens
(figure 3.11) est obtenu par la segmentation de la surface médiane en deux sous-ensembles, la
transformation inverse (§éq.2.28 et §éq.2.29) et la comparaison de la valeur de chaque voxel selon
l’éq.3.30 .
Comme pour le plan, le volume des liens dans l'espace est associé au rayon du nœud de connexion et
chacun des volumes des autres objets est associé au plus grand rayon d'un nœud dans chacun de ces
volumes.
Selon le modèle de segmentation développé, la fonction de distribution de liens est le rapport
d'occupation de l'espace par les rayons des volumes associes aux éléments de liaison. La fonction de
distribution de sites est le rapport d'occupation de l'espace par les éléments restant (figure 3.12), selon
deux approches différentes: la distribution par decoalescence et la distribution par volume effectif.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 97
Fig. 3.11 - Le volume des liens pour l’ensemble de 27 boules de la fig. 2.36.a.
Fig. 3.12 - Le volume des sites pour l’ensemble de 27 boules de la fig. 2.36.a.
La distribution de sites par decoalescence est la fonction déterminée par un modèle de réseau où les
liens n'ont pas de volume, ils ont seulement une contribution en nombre. Pour chaque élément identifié
comme un lien, le volume est réparti également entre les sites que lui sont connectés. Ce modèle de
structure permet la comparaison directe entre la distribution topologique et la distribution morphologique
(§3.3.1.2) pour associer tout le volume du domaine aux rayons plus effectifs de la forme (les plus
grands), c’est-à-dire : les rayons des sites.
Comme pour la distribution de liens, la distribution de sites effectifs correspond au rapport d'occupation
de l'espace uniquement par les sites, fonction des rayons associés aux objets respectifs.
3.3.2.2 Fonction Distribution Topologique Le rangement dans l’espace des objets d’un volume selon un réseau détermine la propriété physique

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 98
de transfert de l’ensemble. Le premier indicateur de ce arrangement est le nombre de coordination
(§3.3.2.2) mais cette information est insuffisante pour caractériser complètement l’organisation
apparente du milieu.
Dans la théorie de la percolation (§1.3.1.4.3), la perméabilité relative au fluide est nulle en dessous du
seuil de percolation qui dépend de la coordination du réseau, c'est à dire le nombre de liens se
rencontrant en chaque nœud. Un nombre de coordination du réseau est mesuré sur le volume
segmenté §3.3.2.1 à partir de l’identification pour chaque site des liens qui lui sont connectés. Le
nombre de coordination pour les liens est aussi facilement obtenu par l’identification pour chaque lien
des sites connectés. Ainsi, une fonction distribution de nombre de coordination est obtenue par rapport
aux rayons des sites dans le volume segmenté.
Selon la méthode de segmentation du volume par le GLMG développée dans ce travail, une fonction de
distribution topologique est construite par l’identification des liens connectés à chaque site, et exprimé
en fréquence de connexion. La fonction topologique est représentée par une surface à partir de trois
axes : rayon de site, rayon de lien et fréquence de connexion. L’analyse de cette surface constitue un
indicateur de la topologie du réseau et de comparer les structures qui ont la même morphologie mais
une organisation topologique différente.
3.4 Génération de Structures 3D Pour permettre l’étude de la morphologie et de la topologie sur des géométrie représentatives des
structures réelles tout en ayant un ensemble de données minimum, quatre différents arrangements
spatiaux sont générés : deux géométries régulières et deux géométries irrégulières. Les deux géométrie
régulières sont générées à partir des algorithmes introduits dans la section §3.2.1, et une géométrie
irrégulière à partir d’une fonction gaussienne (§3.2.2). Un milieu fissuré est généré à partir de la
structure gaussienne selon l’algorithme de la section §3.2.2 pour permettre l’étude de l’action d’une
porosité secondaire dans le réseau. A la fin du chapitre, un échantillon de neige 3D est aussi étudié
pour mettre en évidence les potentialités des techniques développées ici sur des échantillons réels.
Par simplification, les termes solide et poreux seront utilisés même quand le cas physique n’existe pas,
et dans tous les exemples, les deux phases (solide et poreux) seront étudiées en 2D et en 3D pour
permettre la comparaison et l'interprétation des paramètres morphologiques et topologiques. La
méthode d’extraction des opérateurs structurants en 3D utilise la LMVFn pour l’obtention du GLMG et
la segmentation du volume, où les résultats sont corrigés (si nécessaire) en fonction de la différence de
volume reconstruit (§2.3.2.4) par la transformation inverse du squelette.
3.4.1 Structure régulière
L’objectif de l’étude d’une morphologie et d'une topologie sur des échantillons réguliers est de pouvoir

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 99
observer et interpréter simplement les résultats. Ainsi, une structure exemple non-realiste est d’abord
générée à partir d’un arrangement régulier de sphères sans contact selon une grille cubique. Ensuite, la
même morphologie de base est étudiée avec pour changement topologique le passage à un
empilement cubique de face centré selon un contact de superficie (sans interférence).
3.4.1.1 Sphères sans connexion
L’empilement des sphères1 sans connexion est généré avec un rayon caractéristique de 8 voxel
séparés par une distance régulier de 3 voxel selon les axes ordonnés (figure 3.13.a et figure 3.14). La
dimension caractéristique d’échantillon est 182x182x182 voxels pour permettre la segmentation dans
les centres des sphères sur les bords du volume, selon l’image de la section représentative 2D de la
figure 3.13.b. On appelle phase solide l’ensemble des sphères avec un taux d’occupation du volume
30,63% (porosité ε3D=0,69). Le taux d’occupation de la phase solide dans la section représentative 2D
est 55,98%, ceci correspond à une porosité ε2D=0,44.
(a) (b)
Fig. 3.13 - L’empilement régulier de sphères sans contact (a) et la section 2D représentative (b).
La dimension caractéristique d’un VER pour la phase solide, la phase poreuse, l'index de surface solide
et poreuse n’est pas observée dans cet échantillon (figure 3.15.a), avec un profil de porosité dans la
direction Z selon la figure 3.15.b. Cela indique que le rapport entre la taille caractéristique du volume et
les grains n’est pas optimale pour ce rangement topologique.
1 Les sphères générées sont euclidiennes (comme dans la figure 2.32.a) selon la méthodologie présentée dans la section § 3.2.1.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 100
Fig. 3.14 - L’empilement régulier de sphères sans contact.
0,0
0,2
0,4
0,6
0,8
1,0
0 50 100 150 200Taille (voxel)
Volu
me
SolideSurf.SolidePoreSurf.Pore
0
20
40
60
80
100
120
140
160
180
0,0 0,5 1,0Porosité section XY
Dire
ctio
n Z
(vox
el)
(a) (b)
Fig. 3.15 - La mesure d’un VER pour la phase solide, la phase poreuse, l'index de surface du solide et pour l’index de surface du pore (a) et le profil de porosité en Z (b).
La granulométrie de la phase solide par l’opération d’ouverture en 3D ainsi que sur la section
représentative 2D (ouverture 2D) sont présentées dans la figure 3.16, où on observe la bonne
concordance entre les résultats. L'importante contribution des éléments du contour est observée pour
les éléments de rayon 4 dans la distribution (dans le plan et le volume). La perturbation de la distribution
morphologique observée dans les valeurs de rayon 7 voxel (pixel dans le plan) est l'effet des erreurs
commises par la mesure granulométrique d'une sphère euclidienne approximée par avec une distance
de chanfrein (effet observé dans la figure 3.9 - pour le sphère euclidienne et le cercle euclidien).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 101
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
(a) (b)
Fig. 3.16 - Granulométrie par ouverture pour la phase solide 3D (a) et pour la phase solide de la section représentative 2D (b).
Les distributions de taille de pores pour les phases poreuses 3D et 2D selon l’opération d’ouverture sont
présentées dans la figure 3.17, où on observe une différence significative entre les rayons
caractéristiques. La différence entre les distributions confirme que l’image de la section 2D n’est pas
représentative de la phase poreuse du volume, ce qui a été déjà observé par la différence entre les
porosité 2D et 3D.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
(a) (b)
Fig. 3.17 - Granulométrie par ouverture pour la phase poreuse 3D (a) et pour la phase poreuse de la section représentative 2D (b).
Par segmentation de la phase solide dans la section représentative par le GLMG1 2D on atteint la
distribution de sites2 (figure 3.18.a), sans détection de liens. Dans la figure 3.18.b est présenté la
distribution topologique de sites de la phase poreuse de la section 2D (par le GLMG en 2D).
1 GLMG obtenue à travers de la LM 2D. 2 Les distributions de sites sont toujours présentées avec une contribution nulle en surface (ou en volume en 3D) des liens observés : la distribution de sites par decoalescence.
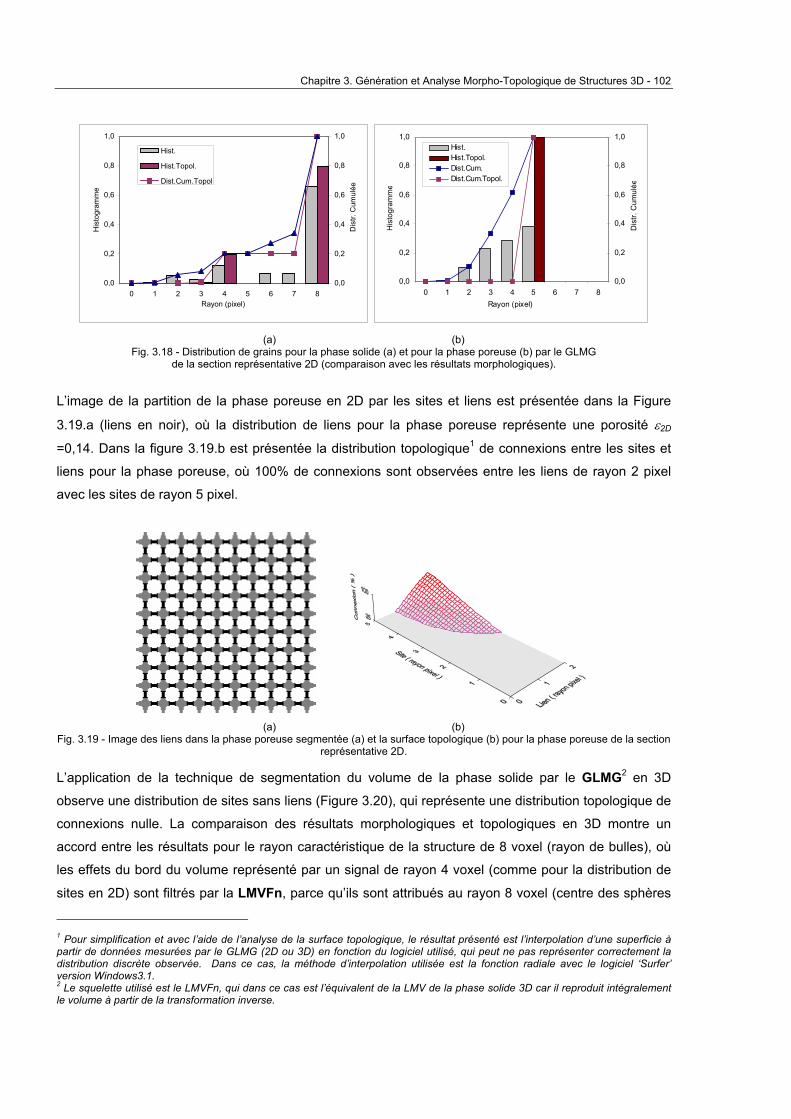
Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 102
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist.
Hist.Topol.
Dist.Cum.Topol
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist.Hist.Topol.Dist.Cum.Dist.Cum.Topol.
(a) (b)
Fig. 3.18 - Distribution de grains pour la phase solide (a) et pour la phase poreuse (b) par le GLMG de la section représentative 2D (comparaison avec les résultats morphologiques).
L’image de la partition de la phase poreuse en 2D par les sites et liens est présentée dans la Figure
3.19.a (liens en noir), où la distribution de liens pour la phase poreuse représente une porosité ε2D
=0,14. Dans la figure 3.19.b est présentée la distribution topologique1 de connexions entre les sites et
liens pour la phase poreuse, où 100% de connexions sont observées entre les liens de rayon 2 pixel
avec les sites de rayon 5 pixel.
(a) (b)
Fig. 3.19 - Image des liens dans la phase poreuse segmentée (a) et la surface topologique (b) pour la phase poreuse de la section représentative 2D.
L’application de la technique de segmentation du volume de la phase solide par le GLMG2 en 3D
observe une distribution de sites sans liens (Figure 3.20), qui représente une distribution topologique de
connexions nulle. La comparaison des résultats morphologiques et topologiques en 3D montre un
accord entre les résultats pour le rayon caractéristique de la structure de 8 voxel (rayon de bulles), où
les effets du bord du volume représenté par un signal de rayon 4 voxel (comme pour la distribution de
sites en 2D) sont filtrés par la LMVFn, parce qu’ils sont attribués au rayon 8 voxel (centre des sphères
1 Pour simplification et avec l’aide de l’analyse de la surface topologique, le résultat présenté est l’interpolation d’une superficie à partir de données mesurées par le GLMG (2D ou 3D) en fonction du logiciel utilisé, qui peut ne pas représenter correctement la distribution discrète observée. Dans ce cas, la méthode d’interpolation utilisée est la fonction radiale avec le logiciel ‘Surfer’ version Windows3.1. 2 Le squelette utilisé est le LMVFn, qui dans ce cas est l’équivalent de la LMV de la phase solide 3D car il reproduit intégralement le volume à partir de la transformation inverse.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 103
sur la frontière du volume). La distribution morphologique observe dans la section et dans le volume
(figures 3.16 et 3.20) mettrent en évidence les erreurs de l'approximation par la distance de chanfrein
[Chassery, 1991] pour les mesures morphologiques d'une sphère euclidienne [Serra, 1982; 1988], sur
tout pour l'apparition d'un valeur important associé au rayon 7 (erreur déjà observé dans la figure 3.9,
sur le rayon 11 voxel).
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
Fig. 3.20 - Distribution de grains pour la phase solide par le GLMG
comparé avec les résultats morphologiques.
La distribution de sites et de liens pour la phase poreuse 3D est présentée dans la figure 3.21, où on
observe le rayon caracteristique de la section (8 voxel) dans les distributions morphologique et
topologique. Dans la figure 3.21.b sont présentées les distributions pour les liens qui représentent une
porosité ε3D = 0,27, et on observe une similitude entre la distribution de liens 3D et la distribution
topologique de sites pour la phase poreuse en 2D en fonction de la reproduction préférentielle de ces
éléments dans la section.
Dans la figure 3.22 est présentée la distribution topologique de connexions entre les sites et liens de la
phase poreuse, où les liens de rayon 2 voxel ont 58% de connexion avec les sites de rayon 8 voxel
alors que les rayons 5 voxel ont seulement 42%.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 104
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist.Morph.Hist.Topol.Dist.Cum.Topol.Distr.Cum. Morph
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
ame
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.21 - Distribution de sites pour la phase poreuse (a) comparé avec les résultats morphologiques et de liens (b) par le GLMG 3D.
Fig. 3.22 - La surface topologique pour la phase poreuse 3D.
3.4.1.2 Sphères avec connexion Un empilement cubique de face centrée est généré avec un longueur caractéristique de 196x196x196
par des sphères1 de rayon 8 voxel selon la figure 3.23.a, avec un taux d'occupation de la phase solide
de 70,65% (représentée par les grains sphériques) et une porosité ε3D=0,29. Le contact entre les grains
et la surface sans interférence est représenté par l'image de la section 2D (figure 3.23.b). Dans la
section représentative 2D le taux d'occupation de la phase solide (couleur noir) est de 82,40% et la
porosité apparente est ε2D=0,17.
1 Les sphères générées sont euclidiennes (comme dans la figure 2.32.a) selon la méthodologie présentée dans la section § 3.2.1.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 105
(a) (b)
Fig. 3.23 - L’empilement régulier de sphères (a) et la section 2D représentative (b).
L’échantillon numérique est considéré comme un VER pour les paramètres volumique et surfacique
parce qu’on observe un longueur caractéristique pour la phase poreuse et solide à partir de 100 voxels,
et pour les index de surface solide et poreuse à partir de 80 voxels (figure 3.24.a). Le profil de porosité
selon la direction Z est donné par la figure 3.24.b.
0,0
0,2
0,4
0,6
0,8
1,0
0 50 100 150 200
Taille (voxel)
Volu
me
Solide Surf.SolidePore Surf.Pore
0
20
40
60
80
100
120
140
160
180
200
0,0 0,5 1,0Porosité section XY
Prof
onde
ur Z
(vox
el)
(a) (b)
Fig. 3.24 - VER pour la phase solide, index de surface du solide, pore et pour l’index de surface du pore (a) et le profil de porosité en Z (b).
Dans la figure 3.25.a est présentée la distribution granulométrique de la phase solide 3D est 2D
obtenue par l'opération d'ouverture, où on observe le bon accord entre les résultats. Dans la figure 3.26
sont présentées les distributions de tailles de pores par l’opération d'ouverture pour le volume et pour la
section 2D représentative.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 106
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
(a) (b)
Fig. 3.25 - Granulométrie par ouverture pour la phase solide 3D (a) et pour la phase solide de la section représentative 2D (b).
L'application de la technique du GLNG 2D sur l'image de la section segmente la surface solide en sites
et liens, présentée dans l'image partitionnée de la section 2D en noir pour les liens (figure 3.27.a). La
comparaison entre la distribution topologique de sites1 pour la phase solide et la granulométrie par
ouverture est présentée dans la figure 3.27.b, et la distribution topologique de connexions entre les sites
et liens de la phase solide est présentée dans la figure 3.28. Pour la phase poreuse de la section 2D,
100% de sites ont un rayon de 2 voxels avec une distribution nulle de liens.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
(a) (b)
Fig. 3.26 - Granulométrie par ouverture pour la phase poreuse 3D (gauche) et pour la phase poreuse de la section représentative 2D (droite).
1 Distribution de sites par decoalescence.
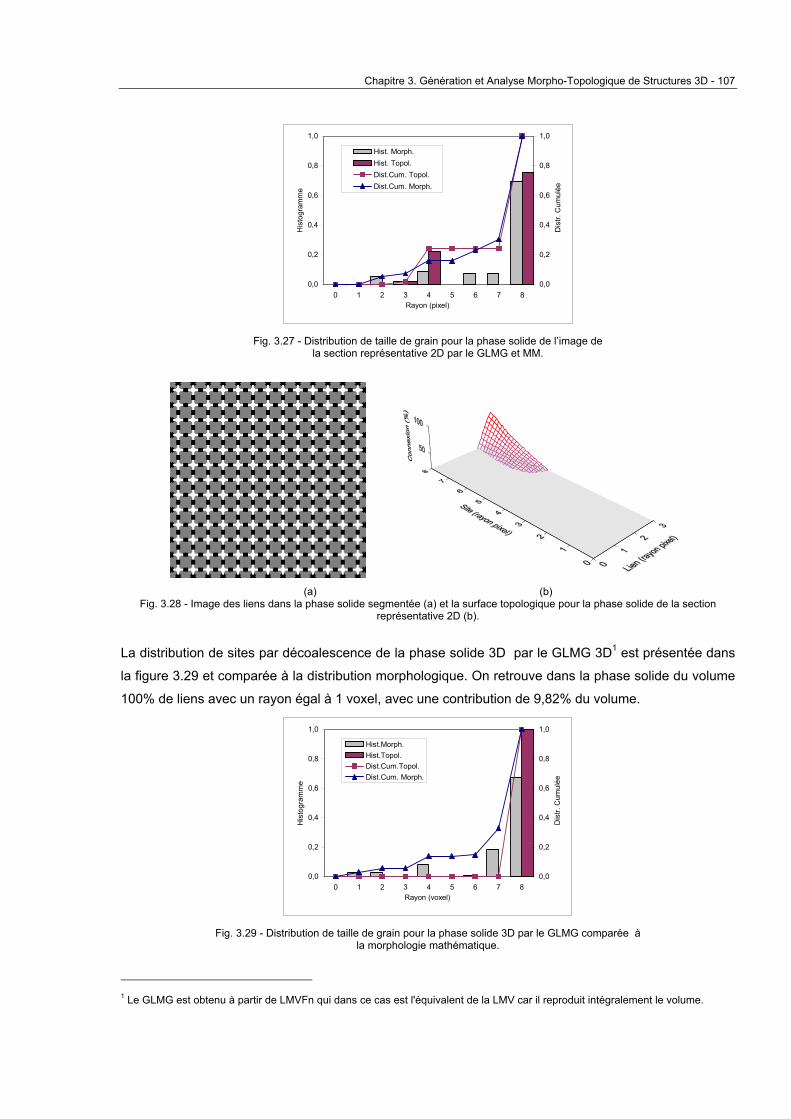
Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 107
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
Fig. 3.27 - Distribution de taille de grain pour la phase solide de l’image de
la section représentative 2D par le GLMG et MM.
(a) (b)
Fig. 3.28 - Image des liens dans la phase solide segmentée (a) et la surface topologique pour la phase solide de la section représentative 2D (b).
La distribution de sites par décoalescence de la phase solide 3D par le GLMG 3D1 est présentée dans
la figure 3.29 et comparée à la distribution morphologique. On retrouve dans la phase solide du volume
100% de liens avec un rayon égal à 1 voxel, avec une contribution de 9,82% du volume.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist.Morph.Hist.Topol.Dist.Cum.Topol.Dist.Cum. Morph.
Fig. 3.29 - Distribution de taille de grain pour la phase solide 3D par le GLMG comparée à
la morphologie mathématique.
1 Le GLMG est obtenu à partir de LMVFn qui dans ce cas est l'équivalent de la LMV car il reproduit intégralement le volume.
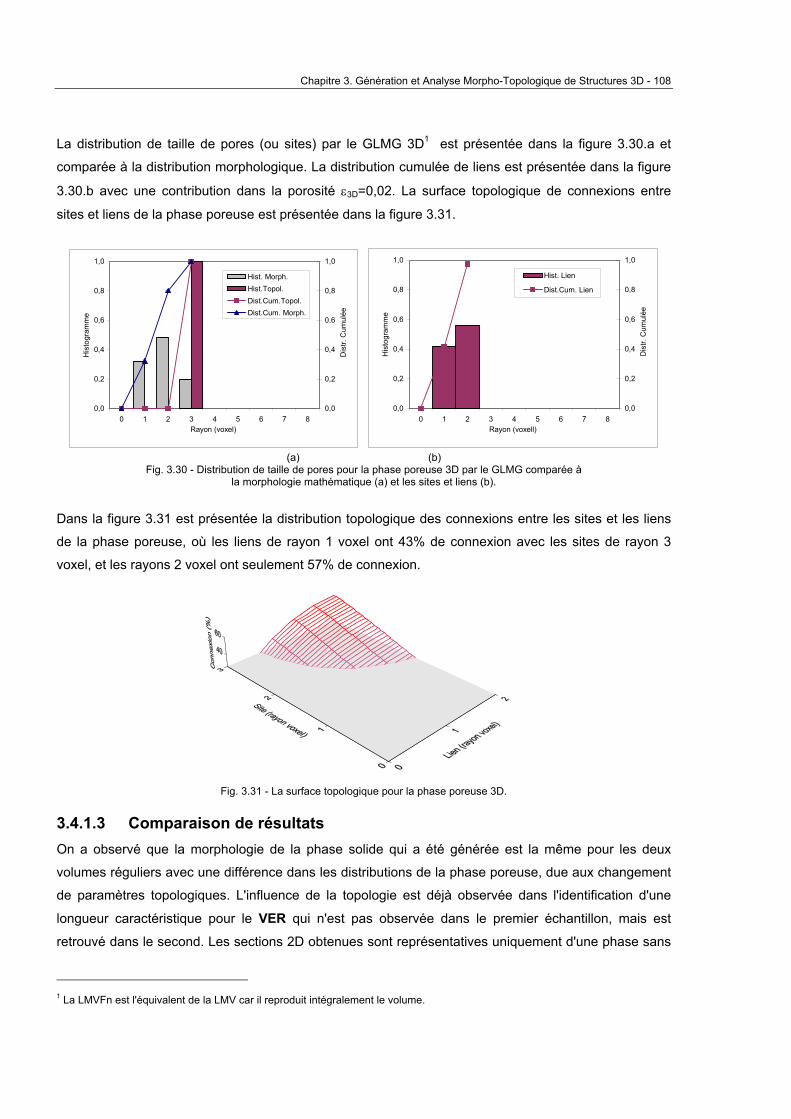
Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 108
La distribution de taille de pores (ou sites) par le GLMG 3D1 est présentée dans la figure 3.30.a et
comparée à la distribution morphologique. La distribution cumulée de liens est présentée dans la figure
3.30.b avec une contribution dans la porosité ε3D=0,02. La surface topologique de connexions entre
sites et liens de la phase poreuse est présentée dans la figure 3.31.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist.Topol.Dist.Cum.Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8Rayon (voxell)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.30 - Distribution de taille de pores pour la phase poreuse 3D par le GLMG comparée à la morphologie mathématique (a) et les sites et liens (b).
Dans la figure 3.31 est présentée la distribution topologique des connexions entre les sites et les liens
de la phase poreuse, où les liens de rayon 1 voxel ont 43% de connexion avec les sites de rayon 3
voxel, et les rayons 2 voxel ont seulement 57% de connexion.
Fig. 3.31 - La surface topologique pour la phase poreuse 3D.
3.4.1.3 Comparaison de résultats On a observé que la morphologie de la phase solide qui a été générée est la même pour les deux
volumes réguliers avec une différence dans les distributions de la phase poreuse, due aux changement
de paramètres topologiques. L'influence de la topologie est déjà observée dans l'identification d'une
longueur caractéristique pour le VER qui n'est pas observée dans le premier échantillon, mais est
retrouvé dans le second. Les sections 2D obtenues sont représentatives uniquement d'une phase sans
1 La LMVFn est l'équivalent de la LMV car il reproduit intégralement le volume.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 109
avoir un pouvoir descriptif du volume car la topologie n'est pas complètement traduite. Ainsi, les
volumes sont morphologiquement équivalentes pour la phase générée (dans le cas du solide) mais
toutes les propriétés géométriques d’intérêt sont modifiées en raison du changement topologique mis
en évidence par les distributions topologiques observées par les opérateurs géométriques GLMG.
3.4.2 Structure irrégulière
Une structure irrégulière est générée par l'algorithme présenté dans la section §3.2.2 pour les
distributions de taille de grains de la phase solide selon une loi statistique et pour l'algorithme de la
section §3.2.3 pour le milieu fissuré. L’objectif de ces structures est de mettre en évidence le rôle d'une
porosité secondaire dans le réseau par le changement topologique du milieu.
3.4.2.1 Fonction Distribution Gaussienne Un milieu poreux irrégulier est généré à partir d'une distribution gaussienne d'éléments de la phase
solide selon un rangement spatial quelconque. La distribution gaussienne est centrée dans un rayon
caractéristique de 6 voxel, avec un variance de 3 voxel, taux d'occupation de la phase solide de 60% ±
5%. Le milieu résultant est présenté dans la figure 3.32, avec une longueur caractéristique de
256x256x256 voxel, avec un taux final d'occupation de la phase solide de 61,79% et une porosité
ε3D=0,38.
Fig.3.32 - Le milieux discret généré avec une distribution gaussiene.
Trois sections caractéristiques selon les axes ordonnées sont obtenues (figure 3.33), les sections
centrales respectivement dénommées les plans XY (cordonnée Z=127), XZ (cordonnée Y=127) et YZ
(cordonnée X=127).
Un longueur caractéristique pour le VER volumique est observée dans la figure 3.34.a à partir de 128
voxel et pour les paramètres surfaciques à partir de 90 voxel. Le profil de porosité selon la direction Z

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 110
est présenté dans la figure 3.34.b, où on observe une variance de profil pour les éléments dans la
profondeur 0-25 voxels. Cette variance est fonction de la partition du volume de génération selon la
direction Z pour la gestion de mémoire informatique, et un déplacement incrémental pour la suite de la
génération. Ainsi, l'algorithme travaille dans un premier temps avec un taux d'occupation nul et un
temps de convergence plus grand.
(a) (b) (c)
Fig. 3.33 - Image de la section XY (a) , section XZ (b) et de la section YZ (c) (256x256 pixel).
0,0
0,2
0,4
0,6
0,8
1,0
0 50 100 150 200 250 300
Taille (voxel)
Volu
me
Solide Surf.SolidePore Surf.Pore
0
50
100
150
200
250
0,0 0,5 1,0Porosité section XY
Dire
ctio
n Z
(vox
el)
(a) (b)
Fig. 3.34 - VER pour la phase solide, la phase poreuse, index de surface du solide et pour l’index de surface du pore (a) et le profil de porosité en Z (b).
Pour conserver la condition d’isotropie du milieu et par la détection d'un VER à partir d'un longueur 128
voxels, le volume est découpé et analysé par la suite dans un sous échantillon de longueur
caractéristique 192x192x192 voxel, centré dans la forme originale (les sections respectives 2D sont
aussi découpées). Le taux d'occupation de la phase solide du sous échantillon est 62,31% (porosité
ε3D=0,37). Pour la section XY, la porosité ε2DXY=0,40 et pour les sections XZ et YZ une porosité
respective de ε2DXZ=0,36 et ε2DYZ=0,36.
La distribution morphologique de taille de grains pour la phase solide dans le sous échantillon analysé
par l’opération d’ouverture en 3D et 2D (pour les trois sections) est présenté dans la figure 3.35. On
observe la concordance des résultats entre les trois sections et le volume avec la distribution selon une

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 111
loi gaussienne centrée dans un rayon de 6-7 voxels. Dans la figure 3.36, la granulométrie par ouverture
de la phase solide 2D de l’échantillon complet est présentée et reste en accord avec les résultats déjà
observés.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
(a)
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
HistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
(b)
Fig. 3.35 - Granulométrie par ouverture pour la phase solide 3D (a) et pour la phase solide
des sections XY,XZ et YZ en 2D (192x192 pixel) (b).
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
HistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
Fig. 3.36 - Granulométrie par ouverture pour la phase solide
des sections XY,XZ et YZ en 2D (256x256 pixel).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 112
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
(a)
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
(b)
Fig. 3.37 - Granulométrie par ouverture pour la phase poreuse 3D (a) et pour la phase poreuse des les sections XY,XZ et YZ en 2D (192x192 pixel) (b).
La distribution de taille de pores pour la phase poreuse 3D et 2D du sous échantillon est présentée
dans la figure 3.37, avec l'observation d'une distribution selon une loi gaussienne centrée dans un rayon
3-4 voxel. Le résultat pour les trois sections 2D de l'échantillon complet est présenté dans la figure 3.38,
où on peut aussi observer la bonne concordance entre les résultats morphologiques 2D et 3D.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
Fig. 3.38 - Granulométrie par ouverture pour la phase poreuse
des sections XY,XZ et YZ en 2D (256x256 pixel).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 113
3.3 METHODOLOGIES D'ANALYSE ....................................................................................................................91
3.3.1 Mesures Morphologiques..................................................................................................................91
3.3.1.1 Porosité ..........................................................................................................................................................91
3.3.1.2 Granulométrie ................................................................................................................................................91
3.3.1.3 Volume élémentaire.......................................................................................................................................93
3.3.1.4 Index de Surface Spécifique - ISS .................................................................................................................93
3.3.2 Mesures Topologiques ......................................................................................................................94
3.3.2.1 Distribution de Sites et Liens.........................................................................................................................94
3.3.2.2 Fonction Distribution Topologique................................................................................................................97
3.4 GENERATION DE STRUCTURES 3D .............................................................................................................98
3.4.1 Structure régulière ............................................................................................................................98
3.4.1.1 Sphères sans connexion .................................................................................................................................99
3.4.1.2 Sphères avec connexion...............................................................................................................................104
3.4.1.3 Comparaison de résultats .............................................................................................................................108
3.4.2 Structure irrégulière........................................................................................................................109
3.4.2.1 Fonction Distribution Gaussienne................................................................................................................109

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 113
A travers le GLMG 2D la distribution de sites par décoalescence de la phase solide de la section 2D XY
est présentée dans la figure 3.39.a, et comparée avec la distribution morphologique associée. Dans la
figure 3.39.b, la distribution de liens est présentée avec une contribution dans le taux d'occupation 2D
de 18,33%.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist.Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10Rayon (pixel)
His
togr
amm
e / D
ist.
Cum
.
Hist.Lien
Dist.Cum.Lien
(a) (b)
Fig. 3.39 - Distribution de taille de grains pour les sites (a) et pour les liens (b) de la phase solide de la section XY par le GLMG.
Dans la figure 3.40.a est présentés la distribution de sites (par décoalescence) de la phase poreuse de
la section XY par le GLMG 2D et comparées à la respective distribution morphologique associée. La
contribution des liens dans la porosité est de ε2DXY=0,14 avec une distribution observée par les courbes
présentées dans la figure 3.40.b
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e / D
ist.
Cum
. Hist.Lien
Dist.Cum.Lien
(a) (b)
Fig. 3.40 - Distribution de taille de grains pour les sites (a) et pour les liens (b) de la phase poreuse de la section XY par le GLMG.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 114
(a) (b)
Fig. 3.41 - Surface topologique pour la section XY 2D solide (a) et pour la phase poreuse (b) (192x192 pixel).
(a) (b)
Fig. 3.42 - Surface topologique pour la section XZ 2D (a) et pour la phase poreuse (b) (192x192 pixel).
(a) (b)
Fig. 3.43 - Surface topologique pour la section YZ 2D (a) et pour la phase poreuse (b) (192x192 pixel).
Les distributions topologiques des sites et des liens connectés pour les phases solide et poreuse des
sections 2D du sous échantillon sont présentées dans les figures 3.41-3.43, respectivement pour les

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 115
sections XY, XZ et YZ. Les mêmes distributions sont analysées pour les sections du volume initial, pour
la phase solide et poreuse dans les figures 3.44-3.46. On observe un bon accord entre les tendances
des surfaces de connexion pour les phases et sections respectives mais on observe une inégalité
quand elles sont comparés entre elles. Ainsi, on vérifie la différence topologique entre les trois différents
sections.
(a) (b)
Fig. 3.44 - Surface topologique pour la section XY 2D (a) et pour la phase poreuse (b) (256x256 pixel).
(a) (b)
Fig. 3.45 - Surface topologique pour la section XZ 2D (a) et pour la phase poreuse (b) (256x256 pixel).
(a) (b)
Fig. 3.46 - Surface topologique pour la section YZ 2D (a) et pour la phase poreuse (b) (256x256 pixel).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 116
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.47 - Distribution de taille de grains (a) et de liens (b) de la phase solide 3D par le GLMG.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.48 - Distribution de taille de pores (a) et de liens (b) de la phase poreuse 3D par le GLMG.
On observe dans la figure 3.47.a la distribution de sites par décoalescence à travers le GLMG 3D
obtenue à partir de la LMVFn1 de la phase solide volumique et la comparaison avec la distribution
morphologique. Les liens ont une contribution dans le taux d'occupation de 6,7%, selon une distribution
relative donnée par la figure 3.47.b. La distribution de sites et liens pour la phase poreuse2 est
présentée dans la figure 3.48, et comparée à la distribution morphologique. Les liens ont une
contribution à la porosité du volume de ε3D=0,07.
Les distributions de connexions entre les sites et les liens des phases solide et poreuse sont présentées
dans la figure 3.49. La comparaison entre les distributions topologiques de connexions de sites et de
liens 3D et 2D met en évidence la différence topologique entre les sections et le volume, avec une
morphologie identique observé dans les distribution de grains et pores. Ainsi, avec la conservation de la
morphologie entre les sections et les volumes, les propriétés physiques de transport dépendants de la
1 Le volume reconstruit par la transformation inverse la LMVFn est 59,23%. 2 Le volume reconstruit par la transformation inverse de LMVFn est ε=0,36.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 117
topologie auront un effet macroscopique différent selon la section analysée, par comparaison avec le
résultat volumique
(a) (b)
Fig. 3.49 - Surface topologique de la phase solide (a) et pour la phase poreuse (b) du volume 3D.
3.4.2.2 Le Milieu Fissuré Un milieu fissuré est généré à partir de l’échantillon gaussien présenté dans la section §3.4.2.1, avec un
taux d’occupation de la phase solide de 59,43% et une porosité ε3D=0,40. Les fissures sont orientées
selon la diagonale du volume (figure 3.50) de 192x192x192 voxel, avec une contribution ε3D=0,0288
dans la porosité du volume, et une distribution morphologique de rayon égale à 1 voxel. Trois sections
2D centrées dans le volume sont présentées dans la figure 3.51, dénommées respectivement plan XY
(porosité ε2DXY=0,41), XZ (porosité ε2DXZ=0,38) et YZ (porosité ε2DYZ=0,38).
Un longueur caractéristique pour le VER volumique est observée dans la figure 3.52.a à partir de 120
voxel, avec une longueur pour le VER des index de surface déjà observés à partir de 60 voxel. Le profil
de porosité pour les fissures et pour l’échantillon selon la direction Z est présenté dans la figure 3.52.b,
où l'on vérifie l’isotropie des fissures de l’échantillon.
Fig.3.50 - L’image des fissures (24x24x24 voxel - fissures "solides") introduites dans le volume irrégulier généré dans la section §3.4.2.1.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 118
(a) (b) (c)
Fig. 3.51 - Image de la section XY (a) , section XZ (b) et de la section YZ (c) pour le milieu fissuré.
0,0
0,2
0,4
0,6
0,8
1,0
0 50 100 150 200
Taille Representative (voxel)
Volu
me
SolideSurf.SolidePoreSurf.PoreSurf.FissuresFissures
0
40
80
120
160
200
0,0 0,5 1,0Porosité
Prof
onde
ur (v
oxel
)Total PoresFissures
(a) (b)
Fig. 3.52 VER pour la phase solide, pour l'index de surface du solide,la phase poreuse et pour l’index de surface du pore (a) et le profil de porosité en Z (b)
La distribution de taille de grains de la phase solide 3D et 2D pour les trois sections par l’opération
d’ouverture est présentée dans la figure 3.53. La comparaison entre la distribution de grains en 3D pour
les échantillons fissuré et non-fissuré montre le changement morphologique que les 3% de fissures ont
provoqué dans la phase solide.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeDistr.Cum.Distr.Cum.Fiss.Hist.Hist.Fissure
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHist. XYHistXZ.Hist.YZDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
(a) (b)
Fig. 3.53 - Granulométrie par ouverture pour la phase solide 3D comparée à la distribution originale (a) et pour la phase solide des les sections XY,XZ et YZ en 2D (b).
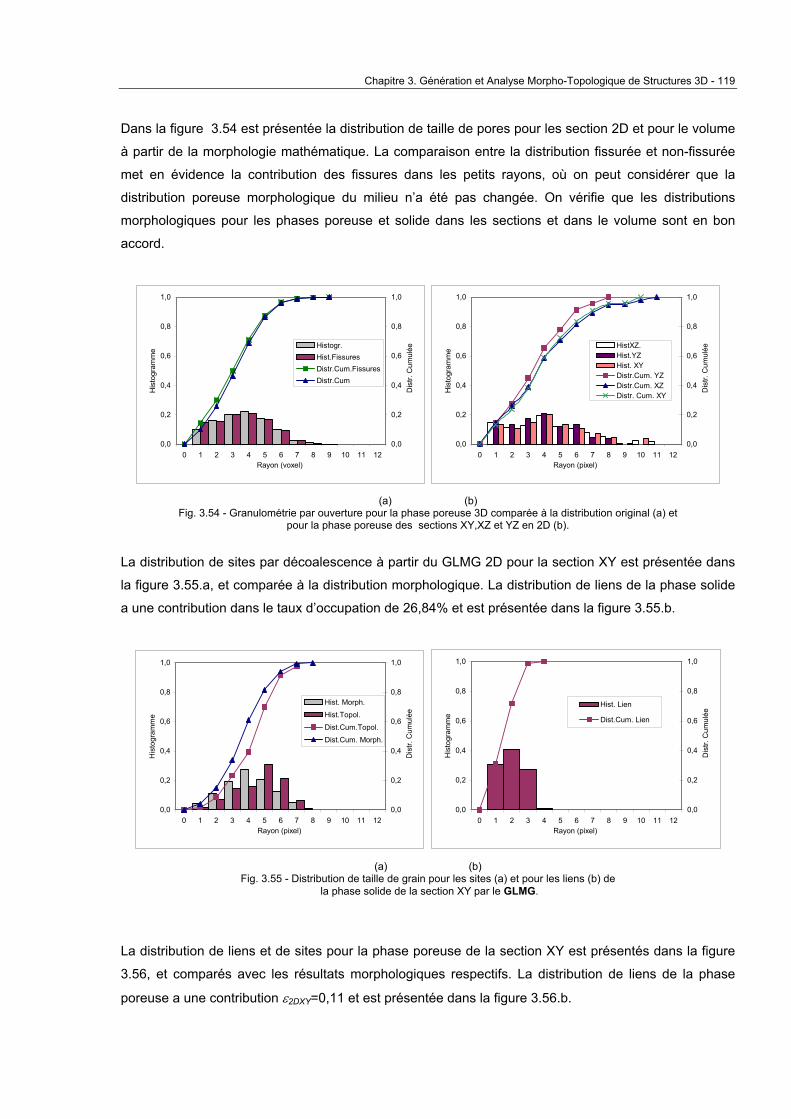
Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 119
Dans la figure 3.54 est présentée la distribution de taille de pores pour les section 2D et pour le volume
à partir de la morphologie mathématique. La comparaison entre la distribution fissurée et non-fissurée
met en évidence la contribution des fissures dans les petits rayons, où on peut considérer que la
distribution poreuse morphologique du milieu n’a été pas changée. On vérifie que les distributions
morphologiques pour les phases poreuse et solide dans les sections et dans le volume sont en bon
accord.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHistogr.Hist.FissuresDistr.Cum.FissuresDistr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
(a) (b)
Fig. 3.54 - Granulométrie par ouverture pour la phase poreuse 3D comparée à la distribution original (a) et pour la phase poreuse des sections XY,XZ et YZ en 2D (b).
La distribution de sites par décoalescence à partir du GLMG 2D pour la section XY est présentée dans
la figure 3.55.a, et comparée à la distribution morphologique. La distribution de liens de la phase solide
a une contribution dans le taux d’occupation de 26,84% et est présentée dans la figure 3.55.b.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist.Topol.Dist.Cum.Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.55 - Distribution de taille de grain pour les sites (a) et pour les liens (b) de la phase solide de la section XY par le GLMG.
La distribution de liens et de sites pour la phase poreuse de la section XY est présentés dans la figure
3.56, et comparés avec les résultats morphologiques respectifs. La distribution de liens de la phase
poreuse a une contribution ε2DXY=0,11 et est présentée dans la figure 3.56.b.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 120
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist.Topol.Dist.Cum.Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (pixel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.56 - Distribution de taille de grain pour les sites (a) et pour les liens (b) de la phase poreuse de la section XY par le GLMG.
Les fonctions de distribution topologique de connexion entre les sites et les liens des phases poreuse et
solide des sections 2D sont présentées dans les figures 3.57-3.58, où on observe les différentes
topologies selon les sections.
(a) (b)
Fig. 3.57 - Surface topologique pour la section XY 2D solide (a) et pour la phase poreuse (b).
(a) (b)
Fig. 3.58 - Surface topologique pour la section XZ 2D solide (a) et pour la phase poreuse (b).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 121
(a) (b)
Fig. 3.59 - Surface topologique pour la section YZ 2D solide (a) et pour la phase poreuse (b).
Les granulométries par le GLMG 3D1 pour les phases solide et poreuse sont présentées
respectivement dans les figures 3.60 et 3.61. La contribution de liens dans le taux d’occupation de la
phase solide est 7,5% (figure 3.60.b) et ε3D=0,05 pour la phase poreuse (figure 3.61.b)
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
(a)
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(b)
Fig. 3.60 - Distribution de taille de grain (a) et des liens (b) de la phase solide 3D par le GLMG.
1 Le volume reconstruit par la LMVFn de la phase solide est 58,10% est pour la phase poreuse est ε=0,39.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 122
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 1 2 3 4 5 6 7 8 9 10 11 12Rayon (voxel)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. LienDist.Cum. Lien
(a) (b)
Fig. 3.61 - Distribution de taille de pores (a) et des liens (b) de la phase poreuse 3D par le GLMG.
Les distributions topologiques de connexions pour les phases solide et poreuse en 3D sont présentées
dans la figure 3.62., où on observe une grande différence entre les résultats topologiques pour les
sections et le volume.
(a) (b)
Fig. 3.62 - Surface topologique pour la phase solide (a) et pour la phase poreuse (b) du volume 3D fissuré.
3.4.2.3 Comparaison de résultats topologiques 2D et 3D La comparaison de résultats morphologiques entre les sections et les volumes respectifs confirment la
détection d’un longueur caractéristique VER pour le rapport de taille de grains et volume, et que les
sections sont représentatives de la morphologie du volume. Les différences observées pour les
distributions topologiques de connexions entre les sections et les volumes respectifs sont l’indication
que les sections 2D ne sont pas représentatives de la topologie du volume, surtout vis-à-vis de
l’orientation préférentielle des fissures. L’observation de la différence entre les surfaces topologiques de
connexion des phases solide et poreuse des volumes confirme le changement des propriétés
topologiques par un sous réseau poreux, caractérisé par un petit diamètre de fissures.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 123
3.4.4 Analyse d'un échantillon de neige 3D
Un échantillon de neige en 3D (figure 3.63) a été obtenu1 au centre d'étude de la neige (Météo France -
Grenoble) selon la méthode décrite dans l'annexe D, à partir de 64 plans de coupe au microtome
observé en lumière reflechie et reconstruites par ordinateur. La longueur caractéristique du volume est
128x128x128 voxel, avec une résolution de 20 µm (longueur de 2,56 mm). Le taux d'occupation des
grains de neige (phase solide) est 58,53%, avec une porosité ε3D=0,47.
Fig. 3.63 - Sections du volume de neige regelée (128x128x128 voxel)
reconstruites par ordinateur.
Dans la figure 3.64, trois sections caractéristiques centrées dans le volume sont présentées selon les
axes ordonnés: section XY (porosité ε2DXY=0,40), section XZ (porosité ε2DXZ=0,39) et section YZ
(porosité ε2DYZ=0,30).
A travers la figure 3.65.a on observe la non existence d'un longueur caractéristique d'un VER volumique
pour le rapport de taille de grains et de volume, mais on atteint un VER pour les index de surface. Le
profil de porosité présenté dans la figure 3.65.b confirme la inhomogenéité du volume par rapport à la
longueur Z: sera donc considéré le volume comme non représentatif d’un VER.
1 Dans cette section l'échantillon de neige analysé est le résultat de l'analyse humaine (traitement réalisé manuellement par deux chercheurs pendant deux semaines) pour être considéré comme le meilleur résultat possible.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 124
(a) (b) (c)
Fig. 3.64 - Image de la section XY (a) , section XZ (b) et de la section YZ (c).
0,0
0,2
0,4
0,6
0,8
1,0
0 500 1000 1500 2000 2500
Taille (microns)
Volu
me
Solide Surf.SolidePore Surf.Pore
0
500
1000
1500
2000
2500
0,0 0,5 1,0Surface de la Section
Prof
onde
ur (m
icro
n)
(a) (b)
Fig. 3.65 - VER pour la phase solide, l'index de surface du solide, pour la phase poreuse, pour l’index de surface du pore (a) et le profil volumique de la phase solide en Z (b).
La comparaison entre les granulométries par ouverture 3D et 2D de la phase solide pour les trois
sections présentées dans la figure 3.66, confirme la non existence d'une longueur caractéristique pour
un VER, et également la non existence d'une section représentative de la morphologie du volume.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
HistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
(a) (b)
Fig. 3.66 - Granulométrie par ouverture pour la phase solide 3D (a) et pour la phase solide des sections XY,XZ et YZ en 2D (b).
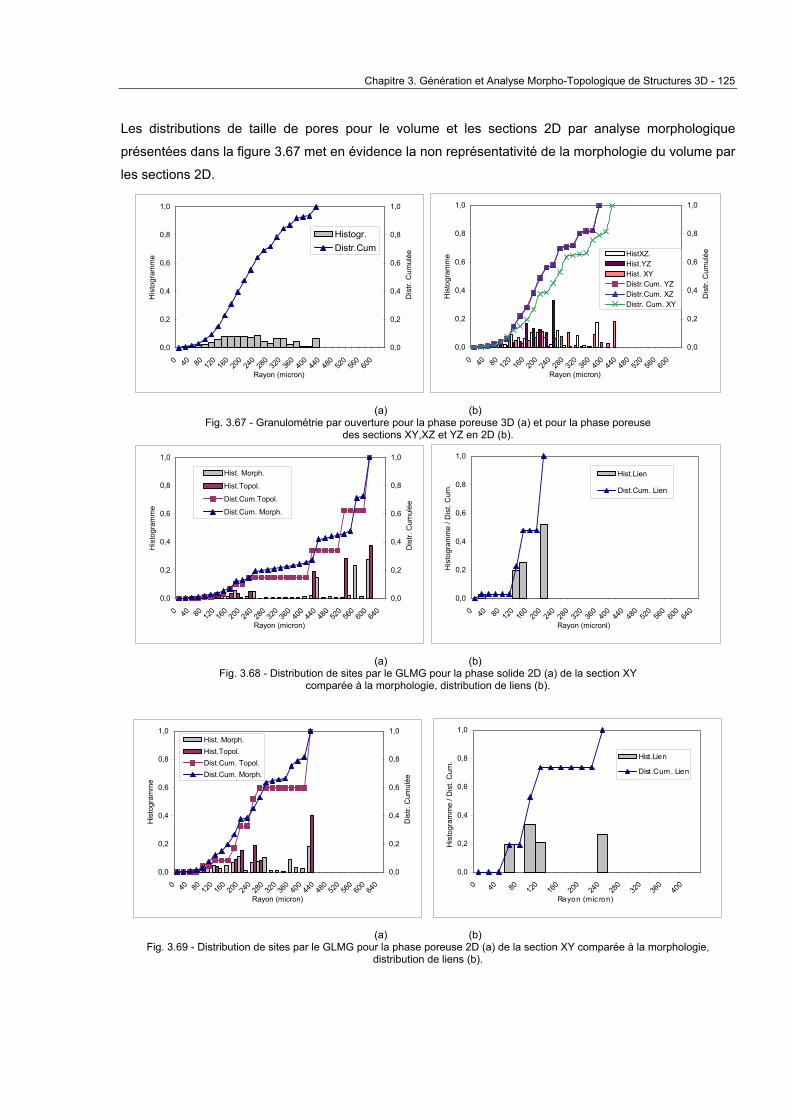
Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 125
Les distributions de taille de pores pour le volume et les sections 2D par analyse morphologique
présentées dans la figure 3.67 met en évidence la non représentativité de la morphologie du volume par
les sections 2D.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Histogr.Distr.Cum
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
éeHistXZ.Hist.YZHist. XYDistr.Cum. YZDistr.Cum. XZDistr. Cum. XY
(a) (b)
Fig. 3.67 - Granulométrie par ouverture pour la phase poreuse 3D (a) et pour la phase poreuse des sections XY,XZ et YZ en 2D (b).
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.
Hist.Topol.
Dist.Cum.Topol.
Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
Rayon (micronl)
His
togr
amm
e / D
ist.
Cum
.
Hist.Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.68 - Distribution de sites par le GLMG pour la phase solide 2D (a) de la section XY comparée à la morphologie, distribution de liens (b).
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist.Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
Rayon (mic ron)
His
togr
amm
e / D
ist.
Cum
. Hist.Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.69 - Distribution de sites par le GLMG pour la phase poreuse 2D (a) de la section XY comparée à la morphologie, distribution de liens (b).

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 126
Dans les figures 3.68 -3.69, les distributions topologiques de sites par décoalescence des phases solide
et poreuse par le GLMG 2D pour la section XY sont comparées aux résultats morphologiques.
Les distributions topologiques pour la connexion des sites et des liens pour les phases solide et
poreuse des sections 2D sont présentées dans les figure 3.70-3.72, où on observe la complète
incompatibilité entre les surfaces.
(a) (b)
Fig. 3.70 - Superficie topologique pour la phase solide (a) et pour la phase poreuse (b) de la section XY 2D.
(a) (b)
Fig. 3.71 - Superficie topologique pour la phase solide (a) et pour la phase poreuse (b) de la section XZ 2D.
(a) (b)
Fig. 3.72 - Superficie topologique pour la phase solide (a) et pour la phase poreuse (b) de la section YZ 2D.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 127
La distribution des sites et des liens pour la phase solide 3D par le GLMG 3D sur la LMVFn est
présentée dans la figure 3.73, et pour la phase poreuse dans la figure 3.74. Dans la figure 3.75, sont
présentées les surfaces topologiques pour la connexion des sites et des liens des phases solide et
poreuse respectivement.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
680
Rayon (micron)
His
togr
amm
e
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
Rayon (micron)H
isto
gram
me
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.73 - Distribution de sites (a) et des liens (b) de la phase solide 3D par le GLMG.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
680
Rayon (micron)
His
togr
ame
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Morph.Hist. Topol.Dist.Cum. Topol.Dist.Cum. Morph.
0,0
0,2
0,4
0,6
0,8
1,0
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
680
Rayon (micron)
His
togr
ame
0,0
0,2
0,4
0,6
0,8
1,0
Dis
tr. C
umul
ée
Hist. Lien
Dist.Cum. Lien
(a) (b)
Fig. 3.74 - Distribution de sites (a) et des liens (b) de la phase poreuse 3D par le GLMG.
(a) (b) Fig. 3.75 - Superficie topologique pour la phase solide (a) et pour la
phase poreuse (b) du volume 3D.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 128
Les résultats obtenus confirment la non existence d'un longueur représentative d'un VER pour le
rapport de taille entre les grains de neige et le volume de l'échantillon, et que les sections 2D ne sont
pas représentatives ni de la morphologie ni de la topologie du volume.
3.5 Synthèse du Chapitre Le chapitre a introduit le développement de techniques de génération de structures régulières et
irrégulières à partir des concepts de la géométrie discrète, avec l’objectif de reproduire les paramètres
mesurés sur des échantillons réels avec une performance informatique améliorée. Les méthodes de
génération sont capables de reproduire les propriétés statistiques observées dans les géométries
régulières et irrégulières. Les échantillons réguliers sont les structures modèles pour les
développements et les essais des techniques de mesures pour la compréhension des résultats
topologiques. Les géométries irrégulières sont capables de reproduire des arrangements spatiaux
rencontrés dans les milieux réels, ainsi que la génération des réseaux poreux complexes tels que les
milieu fissurées et les colonnes de sols stratifiés.
Des méthodes de mesure et d’analyse des paramètres morphologiques et topologiques basées sur la
géométrie algorithmique (ou discrète) ont été développées. Les méthodes d'analyse de la morphologie
de la structure développées ici sont la mesure de la porosité discrète, l'identification d'un longueur
caractéristique d'un VER volumique par la mesure du taux d'occupation du volume par le solide (ou
poreux) et un VER surfacique, pour un index de surface (solide ou poreux) obtenu directement par la
géométrie discrète. Le principal paramètre morphologique développé a été la granulométrie par
ouverture en 3D à partir des masques de chanfrein.
Les paramètres topologiques développés sont basés sur les squelettes structuraux pondérés (§2) et la
représentation graphique (GLMG). Le modèle de partition du volume poreux dans un modèle de réseau
de sites et de liens a été développé en 3D à partir de la représentation du squelette LMVFn par son
graphique associé. La classification du graphe en nœuds de connexion et centrales de la forme avec
ces respectives arcs, permet la partition et l'identification de sites et de liens avec leurs distributions
statistiques respectives. La partition de l'espace poreux dans un réseau de sites et de liens permet de
proposer une fonction de distribution topologique de connexions afin d'identifier l'arrangement structurel
de la topologie.
Dans le chapitre, cinq structures géométriques différentes ont été présentées: deux régulières, deux
irrégulières et une reconstruction volumique. Les structures régulières ont permis l’identification et
l'observation de l'importance de la topologie quand la morphologie reste constante, avec une
modification complété du rangement spatial de la structure de la phase complémentaire.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 129
Les structures irrégulières ont permis de mettre en évidence l'importance de la donnée topologique pour
faire la différence entre les structures morphologiquement identiques, comme entre les sections 2D et le
volume. L'analyse d'un milieu fissuré à partir d'une structure connue a montré l'importance d'un sous
réseau et le changement global de la topologie de la structure même avec la conservation d'une
morphologie apparente, par de faibles perturbations dans les données globales.
Un échantillon réel de neige reconstruit par ordinateur a été étudié et a montré l'importance de
l'identification d'un VER pour l’expérimentation, surtout en ce qui concerne les mesures géométriques.
On a montré l'influence de la taille représentative des données sur la connexion apparente du réseau
entre les sections et le volume.
Les méthodes de mesure et l'interprétation des données morphologiques et topologiques développées
par l'espace discret interprété par l'ordinateur ont permis l'observation de l'influence de l'arrangement
spatial sur la structure global d'un milieu, surtout l'exploration de la géométrie réelle complexe (la neige
3D - un milieu de granulométrie gaussienne) par un outil performant du point de vue mathématique et
informatique. Cela permet l'étude de milieu multi-poreux tel que les milieux fissurés.
Dans le prochain chapitre les techniques d’interprétation de la géométrie par les opérateurs
géométriques seront utilisées pour représenter la géométrie réelle dans les processus et les
méthodologies de simulations de propriétés des transferts, et ainsi faire le lien avec des résultats
comparatifs pour l'importance de la représentativité de la topologie dans les processus de transferts.

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 130

Chapitre 3. Génération et Analyse Morpho-Topologique de Structures 3D - 131
3.4.4 Analyse d'un échantillon de neige 3D 123
3.5 SYNTHESE DU CHAPITRE 128

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 131
Chapitre 4
Modélisation et Simulation des Propriétés de Transferts

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 132

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 133
4.1 Introduction
La modélisation des transferts multiphasiques et l'estimation des propriétés de rétention en milieux
poreux doivent prendre en compte la complexité interne de leur géométrie au niveau microscopique. Ces
propriétés sont liées au positionnement de ménisques sur le front d’intrusion ou d'extrusion à l’échelle du
pore [Adler, 1992 ; Thovert, 1992 ; Maier, 1993 ; Plumb, 1992 ; Fernandes, 1990 ; Fernandes, 1994].
L’écoulement dans la zone non-saturée du sol est un cas spécifique de transfert multiphasique en milieu
poreux. Dans ce cas, l’espace poreux est rempli par l’eau et l’air, les deux fluides les plus importants
dans l’environnement naturel. Les problèmes de prise en compte de deux ou plusieurs fluides non-
miscibles dans le milieu poreux ont été très étudiés dans le domaine pétrolier [Spearing, 1991 ;
Hammecker, 1993 ; Ferreol, 1995 ; Zhou, 1993] où les écoulements d’eau, de vapeur, d'huile et de
solutions liquides sont très importants dans les opérations secondaires d’extraction.
Dans ce chapitre, nous présentons les méthodes que nous avons développées pour simuler des
déplacements capillaires dans des structures poreuses réelles et pour estimer la perméabilité de tels
milieux. Ces méthodes sont basées sur les éléments de géométrie discrète et les opérateurs
topologiques précédemment introduits.
Il est divisé en deux parties: la première est consacrée à la méthode que nous appelons géométrique1 et
la seconde à une méthode de type matriciel.
La méthode géométrique est basée sur l’application directe de la notion de squelette discret. Elle est
utilisée pour la modélisation et la simulation des effets capillaires dans la structure. Nous formalisons
d'abord les concepts physiques d'écoulements multiphasiques non-miscibles à l'aide des opérateurs
géométriques introduits au chapitre §2. Nous précisons également les conventions que nous avons
adoptées dans ce travail. La modélisation géométrique est ensuite appliquée sur les sections
représentatives 2D du milieu Gaussien et du milieu Gaussien Fissuré déjà étudiés au Chapitre §3.
L’analyse des sections de connexion en relation avec les volumes connectés correspondants permet de
comparer les résultats de nos simulations afin de mettre en évidence le rôle de la connexion du réseau.
Dans la seconde partie, la méthodologie baptisée matricielle est formulée pour l’estimation de la
perméabilité du milieu. Elle est basée sur l’application d’une analogie électrique de la représentation du
GLMG. Les principes fondamentaux de cette analogie électrique fondée sur une représentation
graphique sont d'abord introduits. Ensuite, la méthode de résolution numérique adoptée est décrite.
Enfin, des exemples d'application de la méthode matricielle à des structures modèles et sur les
1 Le terme "méthode géométrique" est ici utilisé seulement pour faire la différence entre l'application directe d'un opérateur squelette discret et sa représentation graphique (appelée ici méthode matricielle), car toutes les études théoriques/numériques de transfert en milieu poreux sont basées sur l'interaction entre la géométrie de la structure et le fluide, donc "géométriques".

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 134
géométries Gaussienne et Fissurée (Chapitre §3) sont présentés.
4.2 Méthode géométrique : simulation de l 'intrusion et de l’extrusion d'un fluide non-mouillant
4.2.1 Présentation de la méthode La simulation de l'intrusion d'un fluide non-mouillant correspond soit à l'essai dit de "porosimétrie au
mercure" soit au drainage d'un milieu poreux initialement saturé en eau. Dans le premier cas, le fluide
non-mouillant est le mercure en équilibre avec sa vapeur dans un réseau poreux initialement vide. Dans
le deuxième cas, le fluide mouillant est l'eau et le fluide non-mouillant l'air qui prend la place de l'eau lors
de la désaturation. Ces deux cas sont conceptuellement identiques à condition de négliger les effets du
transport polyphasique ce qui, en d'autres termes, revient à considérer que l'intrusion du fluide non-
mouillant n'est pas gênée par la présence d'un flux contarire de fluide mouillant.
L'équilibre entre fluide mouillant et non-mouillant dans le milieu poreux est régi par l'équation de Laplace
(section §1.3.2, équation 1.15) qui fait intervenir les propriétés caractéristiques des interfaces fluide/fluide
(tension superficielle) et fluide/solide : angle de mouillage. Ces notions sont normalement définies à
l'équilibre mais nous ferons l'hypothèse qu'elles sont aussi utilisables en dynamique.
La méthode géométrique que nous proposons utilise la représentation de l'espace poreux par son
squelette LM telle que nous l'avons introduite au Chapitre §2.
Le modèle simplifié de simulation des états d'équilibre successifs lors de l'intrusion d'un fluide non-
mouillant à différentes valeurs de pression capillaire dans un réseau est construit, à partir du choix d'une
ou plusieurs faces d'alimentation pour le fluide entrant, en considérant qu'à chaque nouvelle valeur de la
pression capillaire Pc, le fluide envahit un pore si et seulement si : i) le rayon satisfait la loi de Laplace
(pour la pression capillaire Pc correspondant) et ii) il existe un chemin continu de pores déjà envahis par
ce fluide le reliant à la face d'alimentation.
Notre méthode de simulation des états d’équilibre est basée sur l’algorithme de reconstruction du volume
poreux selon les éléments du squelette associé (§2.2.1.6 et §2.2.2.8) avec un contrôle de la conductivité
du milieu (contrôle topologique) à partir du front d’intrusion/extrusion sur la topologie du squelette. La
différence de pression détermine un rayon capillaire Rc de forme sphérique par l’équation de Laplace
(§1.3.2). Pour l’ensemble de boules O dans le squelette connecté LM, on vérifie si la boule candidate
P(Rc) est connectée au front d’intrusion/extrusion FID(O) selon un des ses i-voisins (8-voisins en 2D et
26-voisins en 3D) (équation 4.1).
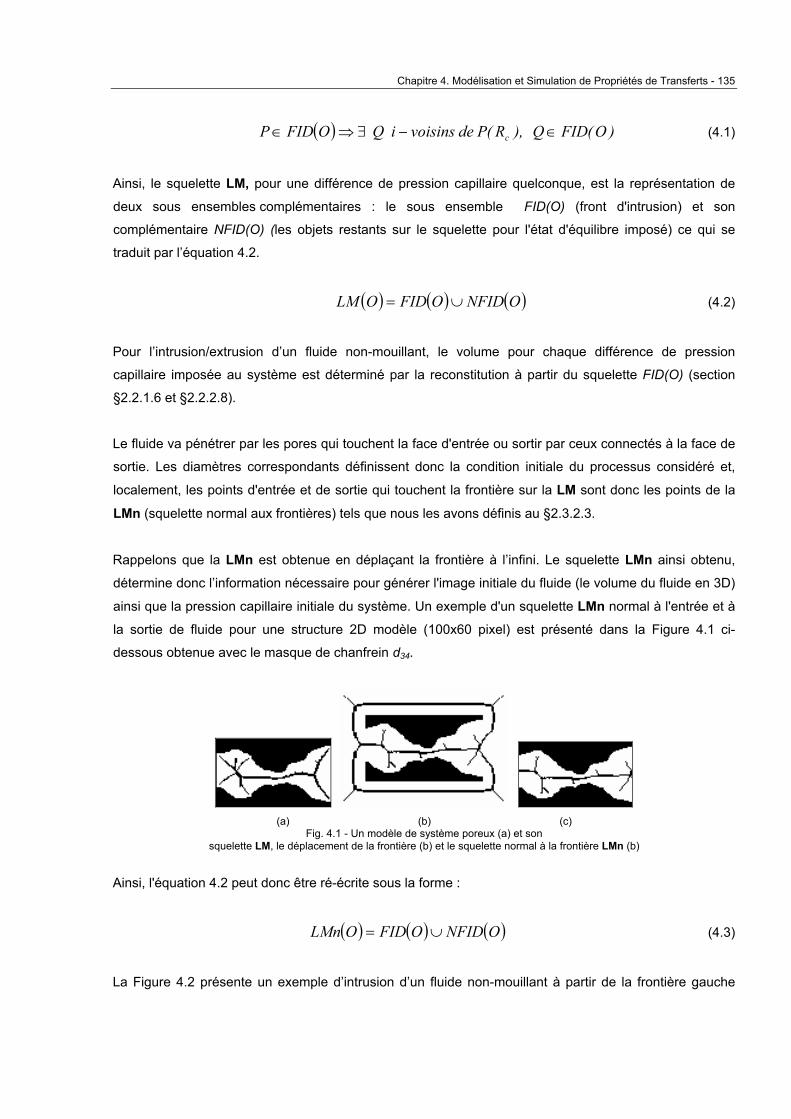
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 135
( ) )O(FIDQ ),R(P de voisinsi Q OFIDP c ∈−∃⇒∈ (4.1)
Ainsi, le squelette LM, pour une différence de pression capillaire quelconque, est la représentation de
deux sous ensembles complémentaires : le sous ensemble FID(O) (front d'intrusion) et son
complémentaire NFID(O) (les objets restants sur le squelette pour l'état d'équilibre imposé) ce qui se
traduit par l’équation 4.2.
( ) ( ) ( )ONFIDOFIDOLM ∪= (4.2)
Pour l’intrusion/extrusion d’un fluide non-mouillant, le volume pour chaque différence de pression
capillaire imposée au système est déterminé par la reconstitution à partir du squelette FID(O) (section
§2.2.1.6 et §2.2.2.8).
Le fluide va pénétrer par les pores qui touchent la face d'entrée ou sortir par ceux connectés à la face de
sortie. Les diamètres correspondants définissent donc la condition initiale du processus considéré et,
localement, les points d'entrée et de sortie qui touchent la frontière sur la LM sont donc les points de la
LMn (squelette normal aux frontières) tels que nous les avons définis au §2.3.2.3.
Rappelons que la LMn est obtenue en déplaçant la frontière à l’infini. Le squelette LMn ainsi obtenu,
détermine donc l’information nécessaire pour générer l'image initiale du fluide (le volume du fluide en 3D)
ainsi que la pression capillaire initiale du système. Un exemple d'un squelette LMn normal à l'entrée et à
la sortie de fluide pour une structure 2D modèle (100x60 pixel) est présenté dans la Figure 4.1 ci-
dessous obtenue avec le masque de chanfrein d34.
(a) (b) (c)
Fig. 4.1 - Un modèle de système poreux (a) et son squelette LM, le déplacement de la frontière (b) et le squelette normal à la frontière LMn (b)
Ainsi, l'équation 4.2 peut donc être ré-écrite sous la forme :
( ) ( ) ( )ONFIDOFIDOLMn ∪= (4.3)
La Figure 4.2 présente un exemple d’intrusion d’un fluide non-mouillant à partir de la frontière gauche
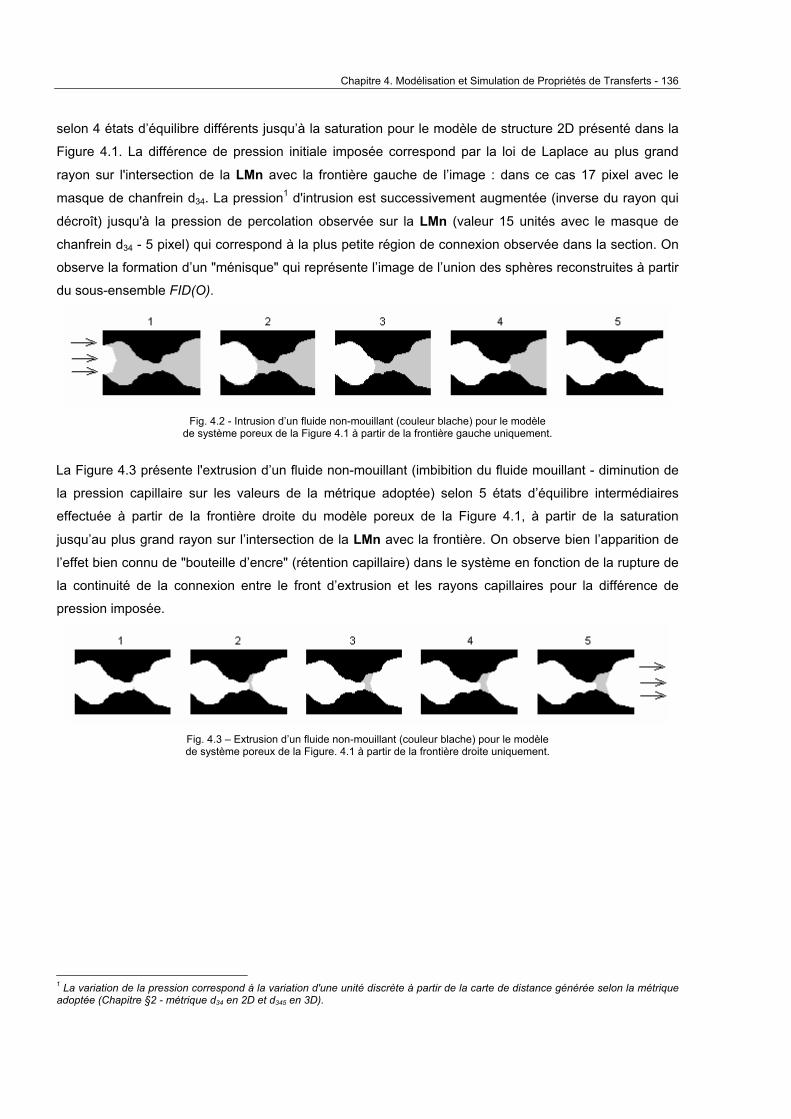
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 136
selon 4 états d’équilibre différents jusqu’à la saturation pour le modèle de structure 2D présenté dans la
Figure 4.1. La différence de pression initiale imposée correspond par la loi de Laplace au plus grand
rayon sur l'intersection de la LMn avec la frontière gauche de l’image : dans ce cas 17 pixel avec le
masque de chanfrein d34. La pression1 d'intrusion est successivement augmentée (inverse du rayon qui
décroît) jusqu'à la pression de percolation observée sur la LMn (valeur 15 unités avec le masque de
chanfrein d34 - 5 pixel) qui correspond à la plus petite région de connexion observée dans la section. On
observe la formation d’un "ménisque" qui représente l’image de l’union des sphères reconstruites à partir
du sous-ensemble FID(O).
Fig. 4.2 - Intrusion d’un fluide non-mouillant (couleur blache) pour le modèle
de système poreux de la Figure 4.1 à partir de la frontière gauche uniquement.
La Figure 4.3 présente l'extrusion d’un fluide non-mouillant (imbibition du fluide mouillant - diminution de
la pression capillaire sur les valeurs de la métrique adoptée) selon 5 états d’équilibre intermédiaires
effectuée à partir de la frontière droite du modèle poreux de la Figure 4.1, à partir de la saturation
jusqu’au plus grand rayon sur l’intersection de la LMn avec la frontière. On observe bien l’apparition de
l’effet bien connu de "bouteille d’encre" (rétention capillaire) dans le système en fonction de la rupture de
la continuité de la connexion entre le front d’extrusion et les rayons capillaires pour la différence de
pression imposée.
Fig. 4.3 – Extrusion d’un fluide non-mouillant (couleur blache) pour le modèle de système poreux de la Figure. 4.1 à partir de la frontière droite uniquement.
1 La variation de la pression correspond à la variation d'une unité discrète à partir de la carte de distance générée selon la métrique adoptée (Chapitre §2 - métrique d34 en 2D et d345 en 3D).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 137
4.2.2 Limitations
Le modèle géométrique proposé est limité par la représentation de l'angle de contact qui reste constant
en fonction du caractère tangentiel des cercles (sphères en 3D) par rapport aux parois des pores ce qui
correspond au cas idéal d'un fluide parfaitement mouillant ou parfaitement non-mouillant.
Le pas de pression imposé au système n'est pas constant puisque la simulation est faite à partir de la
variation constante d'une valeur du rayon sur le squelette discret. Cela représente une surestimation des
résultats pour les pressions capillaires élevées (les plus petits rayons proches de la résolution de
l'image/volume). Le plus petit pas de pression que l'on peut appliquer correspond à une variation d'une
unité selon la métrique discrète. On ne peut donc obtenir qu'une représentation discrète de la relation
pression/taux de saturation dans la simulation qui dépendra de la résolution de l'image.
Les effets d'instabilité de l'interface lorsqu’il y a rupture de la phase non-mouillante lors de l'extrusion ne
pouvent être représentés. On pourrait étudier une correction sur la fonction d'extrusion ainsi déterminée
mais cela n'a pas été abordé dans le cadre de ce travail.
4.2.3 L’intrusion et l'extrusion d'un fluide non-mouillant dans les sections 2D La méthode géométrique pour la simulation de l'intrusion et de l'extrusion de fluides non-mouillants que
nous venons de décrire à été appliquée sur les sections des volumes Gaussien et Gaussien Fissuré déjà
introduits au chapitre §3. On a comparé les résultats de ces simulations sur trois sections représentatives
de chaque échantillon et, ensuite, on a analysé la contribution du sous-réseau de "fissures" (sur les trois
sections représentatives). Dans la Figure 4.4 sont présentés les squelettes normaux aux frontières LMn
de trois sections du volume Gaussien prises, respectivement, dans les plans XY, XZ et YZ.
(a) (b) (c)
Fig. 4.4 - Images des sections XY (a), XZ (b) et YZ (c) avec le squelette LMn pour la phase poreuse du milieu Gaussien.
L'intrusion et l'extrusion du fluide non-mouillant en 2D sont réalisées à partir de toutes les frontières pour
la section XY (porosité ε2DXY=0,37) du milieu Gaussien et les images résultant de l'intrusion (saturation) et

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 138
de l'extrusion sont présentées dans les Figures 4.5.a & b. La surface occupée par le fluide non-mouillant
pour l'intrusion/extrusion est représentée en gris, la phase solide en noir ainsi que les squelettes
normaux aux frontières (à l'extérieur de la section), la porosité non accessible en blanc.
(a)
(b)
Fig. 4.5 - Image de la section XY du milieu Gaussien (phase solide en couleur noire, le
squelette LMn à l'extérieur en couleur noire) après l'intrusion (a) et après l'extrusion (b) pour un fluide non-mouillant (couleur grise) à partir de toutes les frontières (simulation en 2D).
La Figure 4.6 présente : le résultat numérique d'une simulation d'intrusion avec la métrique discrète d34
sur le squelette LMn, la conversion du résultat en pixel (4.6.b) et la pression capillaire équivalente
proportionnelle à l'inverse du rayon (4.6.c). On observe un taux de saturation final du milieu inférieur à 1
due à l'existence d'une fraction de la porosité inaccessible au fluide.
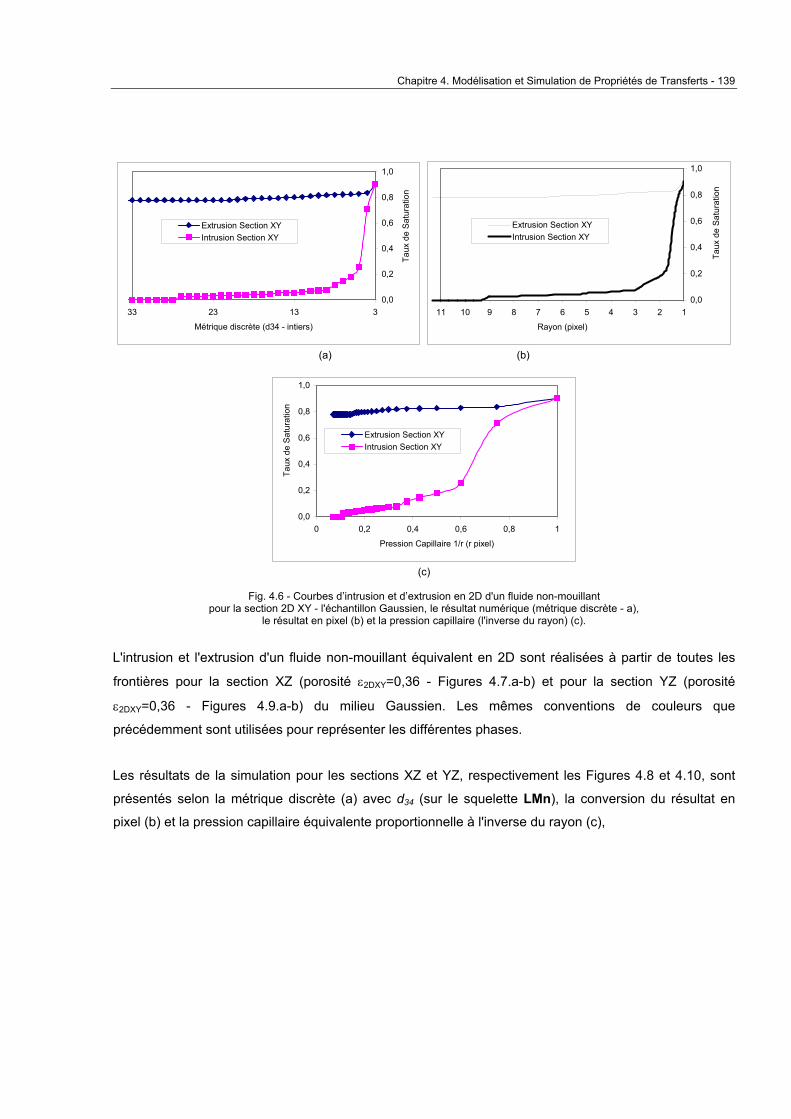
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 139
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d34 - intiers)
Taux
de
Satu
ratio
n
Extrusion Section XYIntrusion Section XY
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (pixel)
Taux
de
Satu
ratio
n
Extrusion Section XYIntrusion Section XY
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r pixel)
Taux
de
Satu
ratio
n
Extrusion Section XYIntrusion Section XY
(c)
Fig. 4.6 - Courbes d’intrusion et d’extrusion en 2D d'un fluide non-mouillant
pour la section 2D XY - l'échantillon Gaussien, le résultat numérique (métrique discrète - a), le résultat en pixel (b) et la pression capillaire (l'inverse du rayon) (c).
L'intrusion et l'extrusion d'un fluide non-mouillant équivalent en 2D sont réalisées à partir de toutes les
frontières pour la section XZ (porosité ε2DXY=0,36 - Figures 4.7.a-b) et pour la section YZ (porosité
ε2DXY=0,36 - Figures 4.9.a-b) du milieu Gaussien. Les mêmes conventions de couleurs que
précédemment sont utilisées pour représenter les différentes phases.
Les résultats de la simulation pour les sections XZ et YZ, respectivement les Figures 4.8 et 4.10, sont
présentés selon la métrique discrète (a) avec d34 (sur le squelette LMn), la conversion du résultat en
pixel (b) et la pression capillaire équivalente proportionnelle à l'inverse du rayon (c),

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 140
(a) (b)
Fig. 4.7 - Image de la section XZ du milieu Gaussien (phase solide en couleur noire, le squelette LMn à l'extérieur en couleur noire)
après l'intrusion (a) et après l'extrusion (b) pour un fluide non-mouillant (couleur grise) à partir de toutes les frontières (simulation en 2D).
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d34 - intiers)
Taux
de
Satu
ratio
nExtrusion Section XZIntrusion Section XZ
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (pixel)Ta
ux d
e Sa
tura
tionExtrusion Section XZ
Intrusion Section XZ
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r pixel)
Taux
de
Satu
ratio
n Extrusion Section XZIntrusion Section XZ
(c)
Fig. 4.8 - Courbes d’intrusion et d'extrusion en 2D d'un fluide non-mouillant
pour la section 2D XZ - l'échantillon Gaussien, le résultat numérique (métrique discrète - a), résultat en pixel (b) et la pression capillaire (l'inverse du rayon) (c).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 141
(a) (b)
Fig. 4.9 - Image de la section YZ du milieu Gaussien (phase solide en couleur noire, le
squelette LMn à l'extérieur en couleur noire) après l'intrusion (a) et après l'extrusion (b) pour un fluide non-mouillant (couleur grise) à partir de toutes les frontières (simulation en 2D).
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d34 - intiers)
Taux
de
Satu
ratio
nExtrusion Section YZIntrusion Section YZ
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (pixel)
Taux
de
Satu
ratio
nExtrusion Section YZIntrusion Section YZ
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r pixel)
Taux
de
Satu
ratio
n
Extrusion Section YZIntrusion Section YZ
(c)
Fig. 4.10 -Courbes d’intrusion et d’extrusion en 2D d'un fluide non-mouillant pour la section 2D YZ - l'échantillon Gaussien, le résultat numérique (métrique discrète - a),
résultat en pixel (b) et la pression capillaire (l'inverse du rayon) (c).
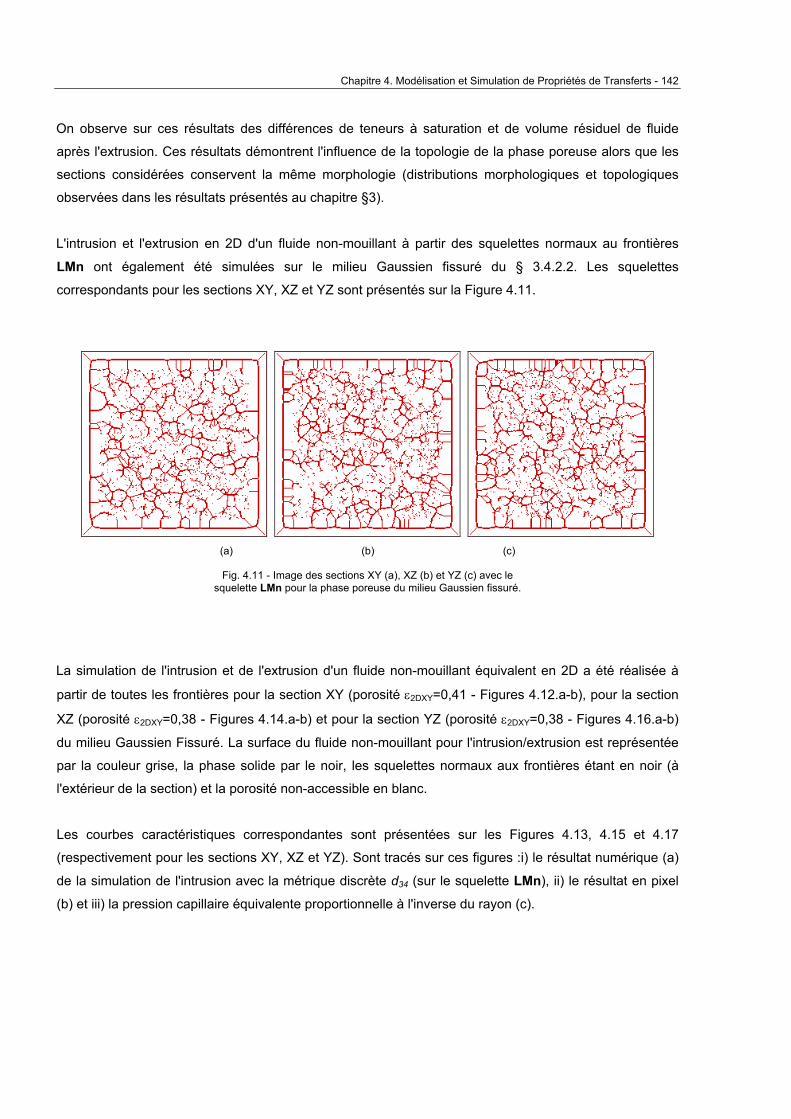
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 142
On observe sur ces résultats des différences de teneurs à saturation et de volume résiduel de fluide
après l'extrusion. Ces résultats démontrent l'influence de la topologie de la phase poreuse alors que les
sections considérées conservent la même morphologie (distributions morphologiques et topologiques
observées dans les résultats présentés au chapitre §3).
L'intrusion et l'extrusion en 2D d'un fluide non-mouillant à partir des squelettes normaux au frontières
LMn ont également été simulées sur le milieu Gaussien fissuré du § 3.4.2.2. Les squelettes
correspondants pour les sections XY, XZ et YZ sont présentés sur la Figure 4.11.
(a) (b) (c)
Fig. 4.11 - Image des sections XY (a), XZ (b) et YZ (c) avec le
squelette LMn pour la phase poreuse du milieu Gaussien fissuré.
La simulation de l'intrusion et de l'extrusion d'un fluide non-mouillant équivalent en 2D a été réalisée à
partir de toutes les frontières pour la section XY (porosité ε2DXY=0,41 - Figures 4.12.a-b), pour la section
XZ (porosité ε2DXY=0,38 - Figures 4.14.a-b) et pour la section YZ (porosité ε2DXY=0,38 - Figures 4.16.a-b)
du milieu Gaussien Fissuré. La surface du fluide non-mouillant pour l'intrusion/extrusion est représentée
par la couleur grise, la phase solide par le noir, les squelettes normaux aux frontières étant en noir (à
l'extérieur de la section) et la porosité non-accessible en blanc.
Les courbes caractéristiques correspondantes sont présentées sur les Figures 4.13, 4.15 et 4.17
(respectivement pour les sections XY, XZ et YZ). Sont tracés sur ces figures :i) le résultat numérique (a)
de la simulation de l'intrusion avec la métrique discrète d34 (sur le squelette LMn), ii) le résultat en pixel
(b) et iii) la pression capillaire équivalente proportionnelle à l'inverse du rayon (c).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 143
(a) (b)
Fig. 4.12 - Image de la section XY du milieu Gaussien Fissuré (phase solide en couleur noire, le
squelette LMn à l'extérieur en couleur noire) après l'intrusion (a) et après l'extrusion (b) pour un fluide non-mouillant (couleur grise) à partir de toutes les frontières (simulation en 2D).
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d34 - intiers)
Taux
de
Satu
ratio
n
Extrusion Section XYIntrusion Section XY
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (pixel)
Taux
de
Satu
ratio
n
Extrusion Section XYIntrusion Section XY
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r pixel)
Taux
de
Satu
ratio
n
Extrusion Section XYIntrusion Section XY
(c)
Fig. 4.13 - Courbes d’intrusion et d’extrusion en 2D d'un fluide non-mouillant
pour la section 2D XY - l'échantillon Gaussien Fissuré, le résultat numérique (métrique discrète - a), résultat en pixel (b) et la pression capillaire (l'inverse du rayon) (c).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 144
(a) (b)
Fig. 4.14 - Image de la section XZ du milieu Gaussien Fissuré (phase solide en couleur noire, le
squelette LMn à l'extérieur en couleur noire) après l'intrusion (a) et après l'extrusion (b) pour un fluide non-mouillant (couleur grise) à partir de toutes les frontières (simulation en 2D).
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d34 - intiers)
Taux
de
Satu
ratio
nExtrusion Section XZIntrusion Section XZ
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (pixel)Ta
ux d
e Sa
tura
tionExtrusion Section XZ
Intrusion Section XZ
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r pixel)
Taux
de
Satu
ratio
n
Extrusion Section XZIntrusion Section XZ
(c)
Fig. 4.15 - Courbes d’intrusion et d’extrusion en 2D d'un fluide non-mouillant
pour la section 2D XZ - l'échantillon Gaussien Fissuré, le résultat numérique (métrique discrète - a), résultat en pixel (b) et la pression capillaire (l'inverse du rayon) (c).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 145
(a) (b)
Fig. 4.16 - Image de la section YZ du milieu Gaussien Fissuré (phase solide en couleur noire, le
squelette LMn à l'extérieur en couleur noire) après l'intrusion (a) et après l'extrusion (b) pour un fluide non-mouillant (couleur grise) à partir de toutes les frontières (simulation en 2D).
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d34 - intiers)
Taux
de
Satu
ratio
nExtrusion Section YZIntrusion Section YZ
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (pixel)
Taux
de
Satu
ratio
nExtrusion Section YZIntrusion Section YZ
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r pixel)
Taux
de
Satu
ratio
n
Extrusion Section YZIntrusion Section YZ
(c)
Fig. 4.17 - Courbes d’intrusion et d’extrusion en 2D d'un fluide non-mouillant
équivalent pour la section 2D YZ - l'échantillon Gaussien Fissuré, le résultat numérique (métrique discrète - a), résultat en pixel (b) et la pression capillaire (l'inverse du rayon) (c).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 146
Les résultats observés pour la simulation 2D de l'intrusion et de l'extrusion des sections du milieu
perturbé par des "fissures" confirment les différences topologiques entre des sections qui ont la même
morphologie caractéristique (chapitre §3).
La comparaison des courbes d'intrusion et d'extrusion des sections des milieux Gaussien et Gaussien
fissuré permet l'observation des conséquences du changement de topologie entraîné par l'introduction de
perturbations dans la structure poreuse (les fissures). Ces perturbations dans les sections n'agissent pas
comme un sous-réseau complètement connecté mais le transfert au niveau macroscopique est modifié
par l'addition d'objets géométriques dans la phase poreuse (changement de forme et de structure). Les
paramètres principalement affectés par ces modifications sont les taux de saturation et de fluide résiduel.
Ainsi, on vérifie que notre méthode de simulation est capable de rendre compte de la complexité du
réseau poreux dans une section et de fournir des indicateurs de l'influence de modifications de la
structure poreuse.
Dans l'annexe C, des résultats comparatifs du même type que ceux que nous venons de commenter sont
présentés pour le cas d'une image 2D réelle de béton cellulaire (AAC : Autoclaved Aerated Concrete).
Une simulation comparative a été réalisée sur l'image initiale de la macroporosité d'une section
(microscopie optique en lumière réfléchie) puis, de nouveau, après introduction d'un réseau de fissures
secondaires (perturbations par des lignes droites aléatoires). Les réseaux de fissures sont complètement
connectés dans l'image de la section, avec un rayon caractéristique de 2 pixel.
4.2.4 Intrusion et extrusion d'un fluide non-mouillant en 3D
Pour simuler un processus d'intrusion, ou d'extrusion, à partir d'un opérateur squelette discret en 3D, il
suffit d'appliquer l'équation 4.3 sur un squelette LMVn, cette fois, volumique comme celui de l'exemple
de la Figure §2.37.a.
Les pressions finale et initiale sont déterminées par l'identification du plus grand rayon sur l'intersection
de la LMVn avec la surface supérieure. Les valeurs de pression capillaire sont exprimées en rayon, avec
une variation dans les pas de pression égale à l'unité discrète (carte de distance dans le volume - 1
voxel).
Dans la Figure 4.18, l'intrusion du volume (Figure 4.18.a - couleur grise) par un fluide non-mouillant est
effectuée à partir de la surface supérieure uniquement, avec 4 différents états d’équilibre intermédiaires
(Figure 4.18.b - 4.18.e - couleur grise) jusqu’à la saturation (Figure 4.18.f - rayon 1 voxel).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 147
(a)
(b) (c) (d)
(e) (f)
Fig. 4.18 - Intrusion 3D d’un fluide non-mouillant dans le volume à partir de la surface supérieure de la Figure 2.37.a (a :le volume poreux ; b :le volume de fluide pour la pression Pc = rayon 10 voxel ; c :le volume de fluide pour la pression Pc = rayon
8 voxel ; d : le volume de fluide pour la pression Pc = rayon 4 voxel ; e : pour Pc = rayon 2 voxel ; f :pour Pc = rayon 1 voxel - saturation)
L'extrusion 3D d'un fluide non-mouillant à partir de la saturation (rayon d'intrusion 1 voxel) est présentée
dans la Figure 4.19 pour le volume exemple de la Figure 2.37.a où le seul chemin de sortie du fluide
(l'extrusion) est la surface supérieure. Trois états d'équilibre intermédiaires sont présentés (Figure 4.19.c
- 4.19.e - couleur grise) à partir de la saturation (Figure 4.19.b) jusqu'à la rétention résiduelle du fluide
dans la structure (Figure 4.19.f).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 148
(a)
(b) (c) (d)
(e) (f)
Fig. 4.19 - Extrusion 3D d’un fluide non-mouillant à partir de la surface supérieure dans le volume de la Figure 2.37.a (a :le volume poreux ; b : le volume de fluide non-mouillant pour la pression Pc = rayon 1 voxel - saturation; c : le volume de fluide
pour la pression Pc = rayon 22 voxel ; d :le volume de fluide pour Pc = rayon 28 voxel ; e : le volume de fluide pour Pc = rayon 36 voxel ; f : le volume de fluide pour Pc = rayon 40 voxel)
Les profils de saturation partielle pour les états intermédiaires des processus d'intrusion/extrusion
(Figures 4.18 et 4.19) sont présentés graphiquement dans la Figure 4.20 et représentés par la couleur
grise. Les profils représentent le taux de saturation partielle dans chaque section XY du volume comparé
à la porosité des sections.
On observe dans le profil de saturation à la pression maximale (qui correspond à un rayon de 1 voxel

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 149
dans la simulation) le volume correspondant à la macroporosité complètement déconnectée du réseau
selon le front d'intrusion/extrusion à partir de la surface supérieure.
(a) (b) (c) (d)
(e) (f) (g) (h)
Fig. 4.20 - Profils pour 3 états (a-c) intermédiaires d'équilibre pour l’intrusion d' un fluide non-mouillant en 3D (pour les volumes
présentés dans la fig. 4.18.a) jusqu'à saturation (d) et 3 états (e-g) intermédiaires pour l'extrusion d'un fluide non-mouillant en 3D jusqu'au fluide résiduel (h) (intrusion et extrusion à travers la surface supérieure uniquement).
4.2.4.1 Le milieu Gaussien 3D
La simulation d'un processus d'intrusion et d'extrusion d'un fluide non-mouillant a été réalisée sur la
structure Gaussienne 3D (192x192x192 voxel - porosité ε3D=0,37) introduite dans le chapitre §3. Les
sections centrales de la LMVn correspondantes sont présentées sur la Figure 4.21.

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 150
Fig. 4.21 - Deux sections centrales du squelette normal aux frontières en 3D (LMVn – gris clair) de
la phase poreuse du milieu Gaussien présenté dans le chapitre §3.
Le processus de simulation a été réalisé à partir de l'identification du plus grand rayon de pore sur les
frontières du volume dans la LMVn, pour l'intrusion et l'extrusion du fluide à partir de toutes les frontières
(surfaces) du volume. Les profils successifs de saturation partielle à partir de la pression initiale jusqu'à la
pression capillaire de saturation (1 voxel), sont présentés Figure 4.22.a. Cinq états intermédiaires de
saturation partielle du milieu sont présentés sur la Figure 4.22.b-f jusqu'à la saturation du milieu (rayon
d'intrusion 1 voxel - 3 unités discrètes - Figure 2.22.g).
Dans la figure 4.23.a sont présentés les profils successifs pour l'extrusion du fluide non-mouillant dans la
structure du milieu gaussien 3D à partir de la saturation (figure 4.23.b). Trois états intermédiaires pour
l'extrusion du fluide sont présentés dans la Figure 4.23.c-e, jusqu'à l'observation d'un fluide résiduel à la
fin du processus de simulation (pression 10 voxel - 30 unités discrètes - Figure 2.23.f).
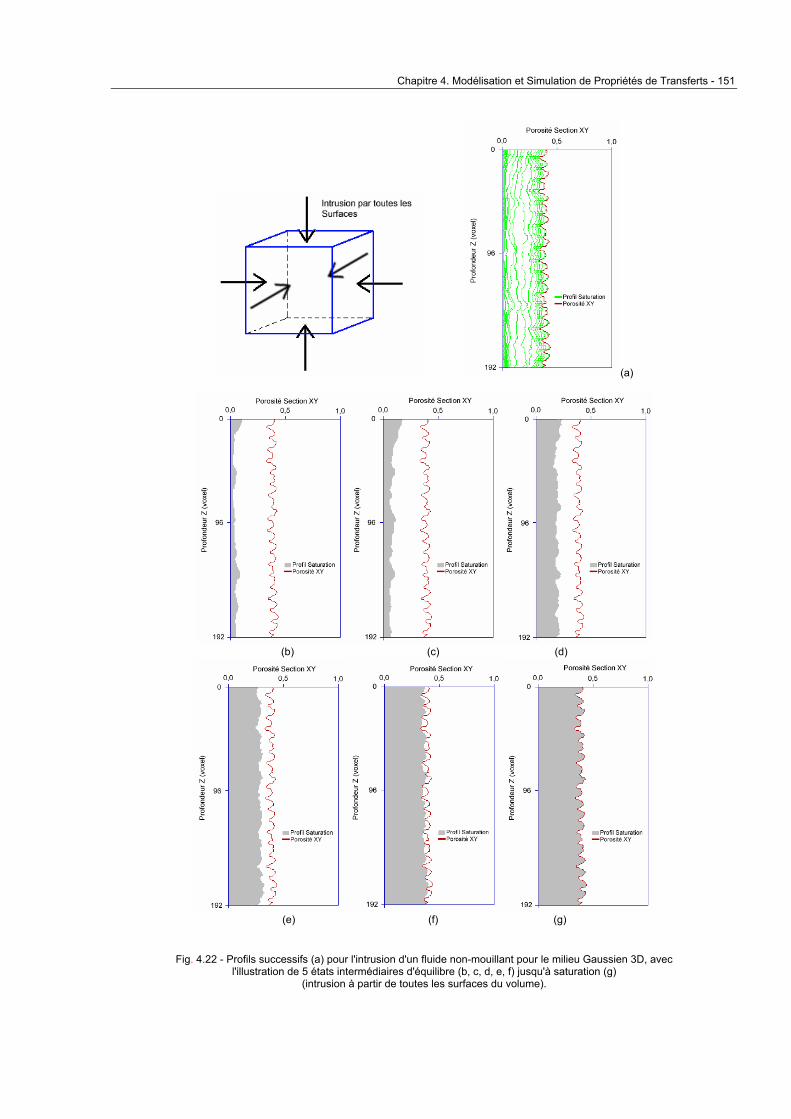
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 151
(a)
(b) (c) (d)
(e) (f) (g)
Fig. 4.22 - Profils successifs (a) pour l'intrusion d'un fluide non-mouillant pour le milieu Gaussien 3D, avec l'illustration de 5 états intermédiaires d'équilibre (b, c, d, e, f) jusqu'à saturation (g)
(intrusion à partir de toutes les surfaces du volume).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 152
(a)
(b) (c) (d)
(e) (f)
Fig. 4.23 - Profils successifs (a) pour l'extrusion d'un fluide non-mouillant pour le milieu Gaussien 3D (a) à partir de la saturation (b),
avec l'illustration de 3 états intermédiaires d'équilibre (c, d, e) jusqu'à l'observation d'un fluide résiduel (f) (extrusion à partir de toutes les surfaces du volume).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 153
La Figure 4.24 présente le résultat numérique de l'intrusion et de l'extrusion du fluide non-mouillant dans
le volume Gaussien avec la métrique d'entiers (a) (d345 - pas de pression égale à 1 unité), la conversion
du résultat en voxel (b) et la pression capillaire équivalente proportionnelle à l'inverse du rayon (c).
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (voxel)
Taux
de
Sat
urat
ioExtrusion VolumeIntrusion Volume
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d345 - intiers)
Taux
de
Sat
urat
ioExtrusion VolumeIntrusion Volume
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r voxel)
Taux
de
Sat
urat
io
Extrusion VolumeIntrusion Volume
(c)
Fig. 4.24 - Courbes d’intrusion et d'extrusion (fluide non-mouillant) en 3D pour le milieu Gaussien à partir
de toutes les surfaces, pour la métrique discrète (a), pour le voxel (b) et pour la pression capillaire équivalente (l'inverse du rayon) (c).
Les taux de saturation finaux observés sur les résultats de la figure 4.24 correspondent bien à la porosité
totale ce qui indique que le réseau poreux est réellement complètement connecté en 3D à toutes ses
frontières. La comparaison entre ces résultats et la simulation géométrique dans les sections 2D
correspondantes (§ 4.2.2) confirme la différence topologique entre un volume et ses sections. Ceci
implique que les phénomènes d'intrusion et d'extrusion de fluides ne peuvent effectivement être étudiés
qu'en 3D

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 154
4.2.4.2 Le milieu fissuré 3D
Le processus de simulation d'intrusion et d'extrusion d'un fluide non-mouillant a été réalisé en 3D sur la
structure du milieu Gaussien Fissuré (192x192x192 voxel - porosité ε3D=0,40) introduit dans le chapitre
§3. Les fissures ont une contribution dans la porosité totale de ε3D=0,0288. Dans la Figure 4.25 sont
présentées en couleur grise claire les sections centrales du squelette LMVn pour le milieu. On observe
visuellement dans la section les projections ponctuelles du squelette du sous-réseau de fissures, en
fonction de leur orientation préférentielle dans la diagonale principale du volume.
Fig. 4.25 - Sections du squelette normal aux frontières (LMVn - gris clair)
pour la phase poreuse du milieu Gaussien fissuré
Le processus de simulation est réalisé à partir de l'identification du plus grand rayon de pore sur les
frontières du volume dans la LMVn pour l'intrusion et l'extrusion du fluide à partir de toutes les frontières
(surfaces) du volume. Les profils successifs de saturation partielle de la pression initiale jusqu'à la
pression capillaire de saturation (1 voxel) sont présentés Figure 4.26.a. Un état intermédiaire de
saturation partielle du milieu est présenté Figure 4.26.b et la saturation finale du milieu Figure 2.26.c
(rayon d'intrusion 1 voxel - 3 unités discrètes).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 155
(a)
(b) (c)
Fig. 4.26 - Profils successifs (a) pour l'intrusion du fluide non-mouillant pour le milieu Gaussien Fissuré en 3D (section §3.4.3.2),
avec l'illustration d’un état intermédiaire d'équilibre (b) et de la saturation (rayon 1 voxel) (c) (intrusion à partir de toutes les surfaces du volume).
Sur la figure 4.27.a sont présentés les profils successifs pour l'extrusion du fluide non-mouillant dans la
structure du milieu Gaussien Fissuré à partir de la saturation. Un état intermédiaire pour l'extrusion du
fluide est présenté Figure 4.27.b et la répartition du fluide résiduel à la fin du processus de simulation
(pression 10 voxel - 30 unités discrètes) peut être observée sur la Figure 4.27c.
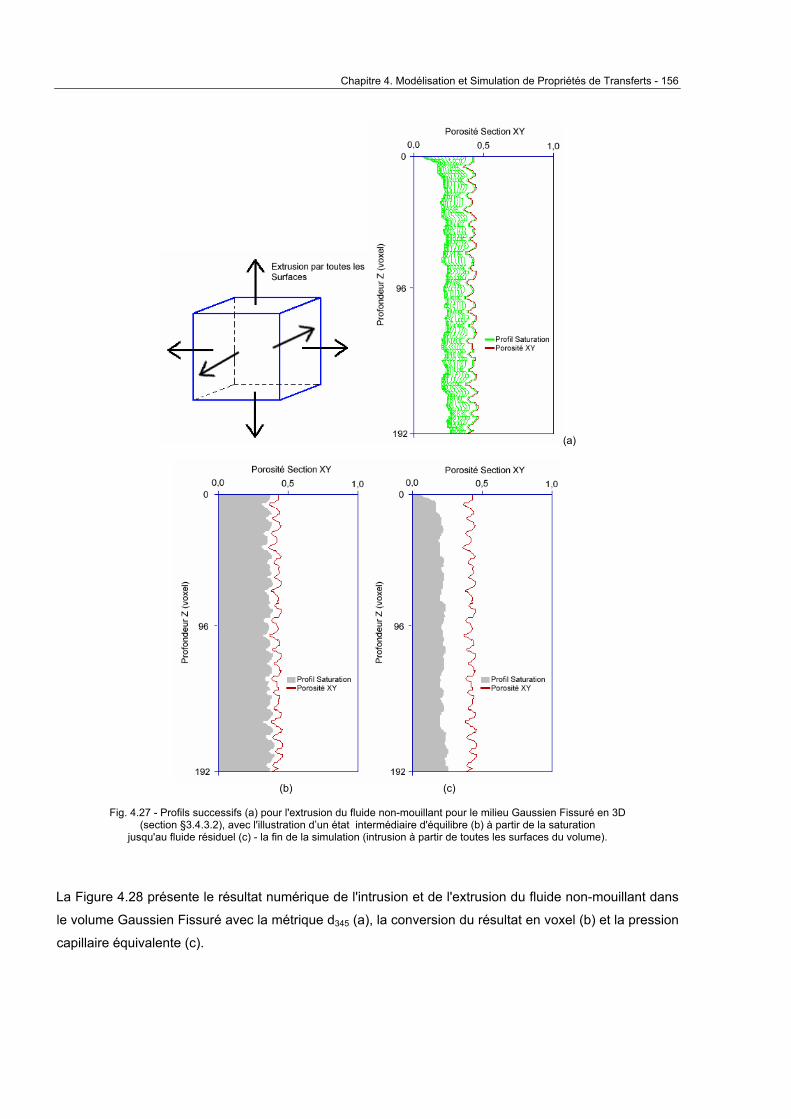
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 156
(a)
(b) (c)
Fig. 4.27 - Profils successifs (a) pour l'extrusion du fluide non-mouillant pour le milieu Gaussien Fissuré en 3D
(section §3.4.3.2), avec l'illustration d’un état intermédiaire d'équilibre (b) à partir de la saturation jusqu'au fluide résiduel (c) - la fin de la simulation (intrusion à partir de toutes les surfaces du volume).
La Figure 4.28 présente le résultat numérique de l'intrusion et de l'extrusion du fluide non-mouillant dans
le volume Gaussien Fissuré avec la métrique d345 (a), la conversion du résultat en voxel (b) et la pression
capillaire équivalente (c).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 157
0,0
0,2
0,4
0,6
0,8
1,0
3132333
Métrique discrète (d345 - intiers)
Taux
de
Sat
urat
ioExtrusion VolumeIntrusion Volume
0,0
0,2
0,4
0,6
0,8
1,0
1234567891011
Rayon (voxel)
Taux
de
Sat
urat
ioExtrusion VolumeIntrusion Volume
(a) (b)
0,0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1
Pression Capillaire 1/r (r voxel)
Taux
de
Sat
urat
io
Extrusion VolumeIntrusion Volume
(c)
Fig. 4.28 - Courbes d’intrusion et d'extrusion en 3D pour le milieu Gaussien Fissuré à partir de toutes les surfaces (fluide non-mouillant), pour la métrique discrète (a), pour le voxel (b)
et pour la pression capillaire équivalente (c).
Comme déjà observé pour le milieu Gaussien, les résultats dans la Figure 4.28 indiquent que la topologie
du volume est différente de la topologie des sections 2D correspondantes (§ 4.2.2).
La comparaison entre les résultats de la Figure 4.28 (milieu fissuré) et ceux de la Figure 4.24 (milieu non-
fissuré) indique une faible contribution de la conductivité dûe aux fissures. La méthode de génération de
fissures impose une connexité préférentielle dans l'orientation de la diagonale principale du volume
(Chapitre §3). Cela se traduit par un rapprochement entre les courbes d'intrusion et d'extrusion (Figure
4.28.c) à partir de la pression capillaire équivalente de 0,4 (petits rayons).
4.2.5 Distribution de la taille de pores en 3D
La détermination des courbes de pression capillaire obtenues par intrusion de mercure (porosimétrie au
mercure) est devenue un moyen d’étude classique de la distribution de la taille de pores, [Metz, 1992]. La
procédure consiste à sécher le matériau pour éliminer toute l’eau, à faire le vide puis à I’immerger dans
un bain de mercure à pression atmosphérique. Le mercure n’imbibe pas spontanément le milieu car il est
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 158
non-mouillant. Le volume de mercure déplacé correspond donc au volume apparent de l'échantillon. On
fait croître ensuite par paliers successifs la pression du mercure qui pénètre ainsi graduellement dans le
réseau poreux. La pression P est reliée au rayon R des pores envahis, par la relation de Laplace (section
§1.3.2 équation 1.15). Classiquement, on reporte le volume occupé par le mercure en fonction de R.
Cette courbe indique la fraction du volume poreux accessible via des rayons supérieurs à R.
On peut utiliser les courbes de porosimétrie au mercure pour quantifier de façon simple les paramètres
structuraux du milieu poreux, [Daian, 1992]. On définit, à partir des courbes de porosimétrie mercure, la
fonction de distribution du volume poreux. Plus précisément la fraction de volume poreux dVp/Vp pour
laquelle les rayons d’entrée du fluide non-mouillant sont compris entre R et R+dR est
( )dRRFVdV
dSp
p −== (4.4)
dS étant la variation de saturation en fluide non-mouillant (mercure). Puisque la pression capillaire est
inversement proportionnelle au rayon capillaire, dR/R = - dP/P, d’où :
( ) ( ) dPRRFP
dPRRFdSασ cos2
2
== (4.5)
La fonction de distribution F(R) est obtenue à partir des courbes S(R)ou S(Pc) :
( ) 2
cos2RdP
dSdRdSRF ασ
=−= (4.6)
F(R)dR représente l’accroissement de la fraction de volume poreux accessible au fluide non-mouillant
pour des rayons d’entrée compris entre R et R+dR. Les résultats ci-dessus ne présupposent aucun
modèle particulier de réseau poreux.
On peut obtenir la fonction de distribution "discrète" de taille de pores, notée ici Fd(Rd), directement à
partir des courbes d'intrusion discrète obtenues par la méthode de simulation géométrique (§4.2). Pour la
variation discrète de saturation en fluide non-mouillant dSd fonction de la variation du rayon discret Rd (1
unité d'entiers par la métrique utilisée - d345), l’équation 4.6 devient
( )d
ddd dR
dSRF −= (4.7)

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 159
Dans la Figure 4.29 est présentée, pour le milieu Gaussien en 3D, la comparaison entre la porosimétrie
obtenue par la méthode de simulation géométrique calculée par l'équation 4.7 et la distribution
morphologique obtenue par ouvertures successives du volume poreux : Chapitre §3. On observe pour la
méthode de simulation géométrique une surestimation de la distribution de la taille de pores pour les
rayons compris entre 2 et 6 voxel. Ce résultat est dû à la représentation topologique de l'arrangement
structurel du réseau de pores traduit par le squelette LMVn, information qui n'existe évidemment pas en
morphologie mathématique classique (Annexe A).
0,0
0,2
0,4
0,6
0,8
1,0
0 2 4 6 8 10
Rayon (Voxel)
His
togr
amm
e
Simulation d'Intrusion
Morphologie Math.
Fig. 4.29 - Comparaison entre les distributions de taille de pores déterminées par
la morphologie mathématique et par la simulation de l’intrusion pour le milieu Gaussien 3D.
Sur a Figure 4.30 est présentée pour le milieu Gaussien Fissuré en 3D la comparaison entre la
porosimétrie obtenue par la méthode de simulation géométrique et la distribution morphologique par
ouverture. Comme pour le milieu Gaussien simple, la méthode de simulation géométrique surestime la
contribution de la taille de pores pour les rayons compris entre 2 et 6 voxel, mais on observe un meilleur
accord entre les rayons inférieurs à 2 voxel. Ce meilleur accord résulte de l’existence d’un sous-réseau
de fissures complètement connecté, avec un rayon caractéristique de 1 voxel (section §3.4.2.2).

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 160
0,0
0,2
0,4
0,6
0,8
1,0
0 2 4 6 8 10
Rayon (Voxel)
Hist
ogra
mm
e
Simulation d'Intrusion
Morphologie Math.
Fig. 4.30 - Comparaison entre les distributions de taille de pores discrètes obtenues par
la morphologie mathématique et par la simulation de l’intrusion pour le milieu Gaussien Fissuré 3D.
4.3 Méthode matricielle : estimation de la perméabilité sur le GLMG
En 1856, G. H. Ph. Darcy observa expérimentalement la relation entre le débit Q d’écoulement à travers
un matériau poreux et la différence de pression appliquée ∆P. De cette expérience, Darcy a déduit une
relation expérimentale de proportionnalité entre ces deux paramètres et il formula la loi qui porte
maintenant son nom :
[ ]1312 −−= sm
L)PP(kSQ
η (4.8)
où S est la surface de la section d'entré du fluide [m2];
η est la viscosité dynamique du fluide [kg.m-1.s--1] ;
P est la pression [kg.m-1.s-2];
k est la "perméabilité" du matériau [m2] .
La perméabilité a la dimension d'une surface. Dans ce sens, il s'agit d'une propriété intrinsèque du milieu.
Si on prend le modèle très simplifié d'un écoulement laminaire dans un tube cylindrique de rayon R, la loi
de Poiseuille s'écrit:
]s[m )(8
134
−∆−=
LPRQ
ηπ
(4.9)
La combinaison de l'équation 4.8 et 4.9 permet d’établir formellement que la perméabilité k d'un tel tube

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 161
est donnée par :
][m 8
22Rk = (4.10)
et, si on raisonne en terme de conductivité hydraulique K, on obtient:
][m.s 1-
ηρ kgK = (4.11)
où ρ est la masse volumique du fluide [kg.m-3] et g l'accélération de la pesanteur [m.s-2] Pour un modèle
du type "électrique" (Chen (1997)) le débit Q qui traverse un tube cylindrique sera fonction de la
conductance hydraulique G du milieu et de la différence de pression ∆P, donnée par
].s[m -13P GQUGI élec ∆=⇒∆= (4.12)
où ∆U est la différence de potentiel entre deux points [Volts];
Gélec la conductance électrique [Ohms-1];
I le courant électrique [Ampère];
Ainsi, en combinant les équations 4.8 et 4.12, on obtient une expression de la conductance hydraulique
G du milieu, donnée par
]s.m[ L
R g LS kgG
412
8−==
ηπρ
ηρ (4.13)
et de la conductivité hydraulique K :
][m.s SL GK 1-= (4.14)
Donc, si la conductance hydraulique Géq d'un réseau poreux de cylindres est connue, on pourra en
déduire la conductivité Ks du milieu.
Sur cette base, nous proposons une méthode simplifiée de calcul de la conductivité hydraulique à
saturation Ks d'un milieu à partir d'un modèle de réseau de pores cylindriques. Le réseau de pores est
obtenu à partir de la représentation géométrique par le squelette LM introduit au chapitre 2 réduit à sa
représentation graphique GLMG : rayons des nœuds et distance entre nœuds.
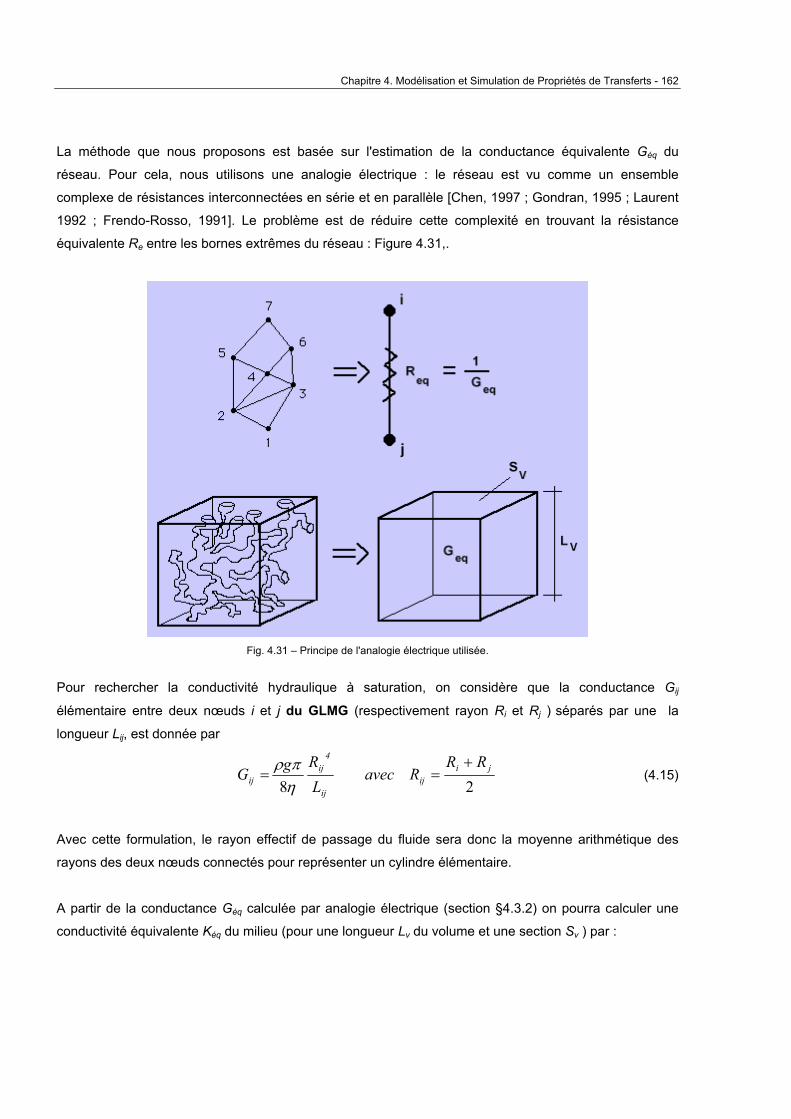
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 162
La méthode que nous proposons est basée sur l'estimation de la conductance équivalente Géq du
réseau. Pour cela, nous utilisons une analogie électrique : le réseau est vu comme un ensemble
complexe de résistances interconnectées en série et en parallèle [Chen, 1997 ; Gondran, 1995 ; Laurent
1992 ; Frendo-Rosso, 1991]. Le problème est de réduire cette complexité en trouvant la résistance
équivalente Re entre les bornes extrêmes du réseau : Figure 4.31,.
Fig. 4.31 – Principe de l'analogie électrique utilisée.
Pour rechercher la conductivité hydraulique à saturation, on considère que la conductance Gij
élémentaire entre deux nœuds i et j du GLMG (respectivement rayon Ri et Rj ) séparés par une la
longueur Lij, est donnée par
28ji
ijij
4ij
ij
RRR avec
LR
g G +
==ηπρ
(4.15)
Avec cette formulation, le rayon effectif de passage du fluide sera donc la moyenne arithmétique des
rayons des deux nœuds connectés pour représenter un cylindre élémentaire.
A partir de la conductance Géq calculée par analogie électrique (section §4.3.2) on pourra calculer une
conductivité équivalente Kéq du milieu (pour une longueur Lv du volume et une section Sv ) par :

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 163
][m.s SL
GK 1-
v
véqéq = (4.16)
L'estimation du Kéq du réseau dépend de la distribution de taille de pores et des propriétés physiques du
fluide. Pour les calculs, la taille caractéristique de pores est imposée par une échelle arbitraire du voxel
(en mètres) et les propriétés physiques du fluide sont celles de l'eau à 20°C (η = 0,00101 kg.m-1.s-1,
ρ =1000 kg.m-3).
La méthodologie proposée a été appliquée sur les échantillons numériques présentés au chapitre 3. Ces
échantillons ont un nombre réduit d'échelles de taille de pores et ne pourront pas représenter fidèlement
une structure réelle. On utilisera donc cette méthode matricielle uniquement pour estimer l'influence de la
complexité de la géométrie sur la conductivité hydraulique du milieu à saturation. Les résultats seront
seulement un indicateur des changements structuraux observés sur la représentation du GLMG et ne
pourront pas constituer un résultat proche d'une véritable mesure.
4.3.1 La matrice de représentation du graphe - MR
Les graphes peuvent être orientés ou non. Leur représentation géométrique est naturelle et ne pose pas
de problèmes particuliers : voir exemple de la Figure 4.33.
(a) (b)
Fig. 4.33 - Graphes non-orienté (a) et orienté (b);
La représentation des graphes peut également être matricielle. A chaque nœud i du graphe sont
associées la colonne j et la ligne i d'une matrice. La diagonale de cette matrice représente la relation
entre le nœud et lui-même, et ses éléments (ij) sont la relation entre les nœuds i et j du graphe. On
choisit de voir les indices de ligne comme ceux des points de départ, et ceux de colonnes comme ceux
des points d'arrivée.
Si le graphe n'est pas orienté, la matrice est symétrique, sinon elle est antisymétrique : Figure 4.34. Ce
problème d'orientation est particulier à chaque cas. Pour nous, les relations entre les nœuds se font au
travers de résistances électriques. Ces éléments étant réels et non orientés, la matrice de représentation
4 2
1 3
5
42
1 3
5

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 164
du graphe (MR) est donc symétrique réelle.
xaaaxaaxaa
aaxaaax
4535
4524
352313
242312
1312
0000
0000
−−−
−−−
xaaaxaaxaa
aaxaaax
4535
4524
352313
242312
1312
0000
0000
(a) (b) Fig. 4.34 - Représentation matricielle d'un graphe non-orienté (a) et orienté (b)
Les seuls éléments non nuls d'une MR sont ceux situés à l'intersection des indices de nœuds liés entre
eux. Comme la coordination des points d'un graphe est toujours très inférieure au nombre total de points,
une MR est toujours très creuse. En résumé, les MR sont:
-carrées;
-de dimensions égales au nombre de points du graphe qu'elles décrivent;
-symétriques, comme dans notre cas, ou antisymétriques;
-creuses.
Ces propriétés permettent de réduire notablement la mémoire nécessaire au stockage des MR (Press
(1988)). Dans notre cas, la Matrice de Représentation MR du graphe GLMG des liens hydrauliques sera
carrée, symétrique, réelle et très creuse.
4.3.2 Analogie électrique : les Matrices YBus
Le graphe GLMG obtenu à partir du squelette de la phase poreuse d'un volume peut être considéré
comme un réseau de conductances hydrauliques semblable à un réseau électrique (équation 4.12). Pour
mesurer la conductance hydraulique, ou l'admittance électrique, les conditions aux limites équivalentes
sont :
-bords supérieur et inférieur du volume équipotentiels;
-bords latéraux isolants.
La méthode la plus générale de calcul d'impédance d'un réseau électrique est celle de la "Matrice Bus
Admittance" ou "Matrice Bus Impédance", nommée simplement Ybus ou Zbus [Austen, 1964]. Cette
technique matricielle permet le calcul de la tension et du courant entrant dans le réseau en chaque
nœud, le nœud 0 étant supposé être la référence de potentiel nul. Le réseau est décrit par son graphe
(Figure 4.35), chaque nœud est numéroté, le numéro 0 étant "la Terre".
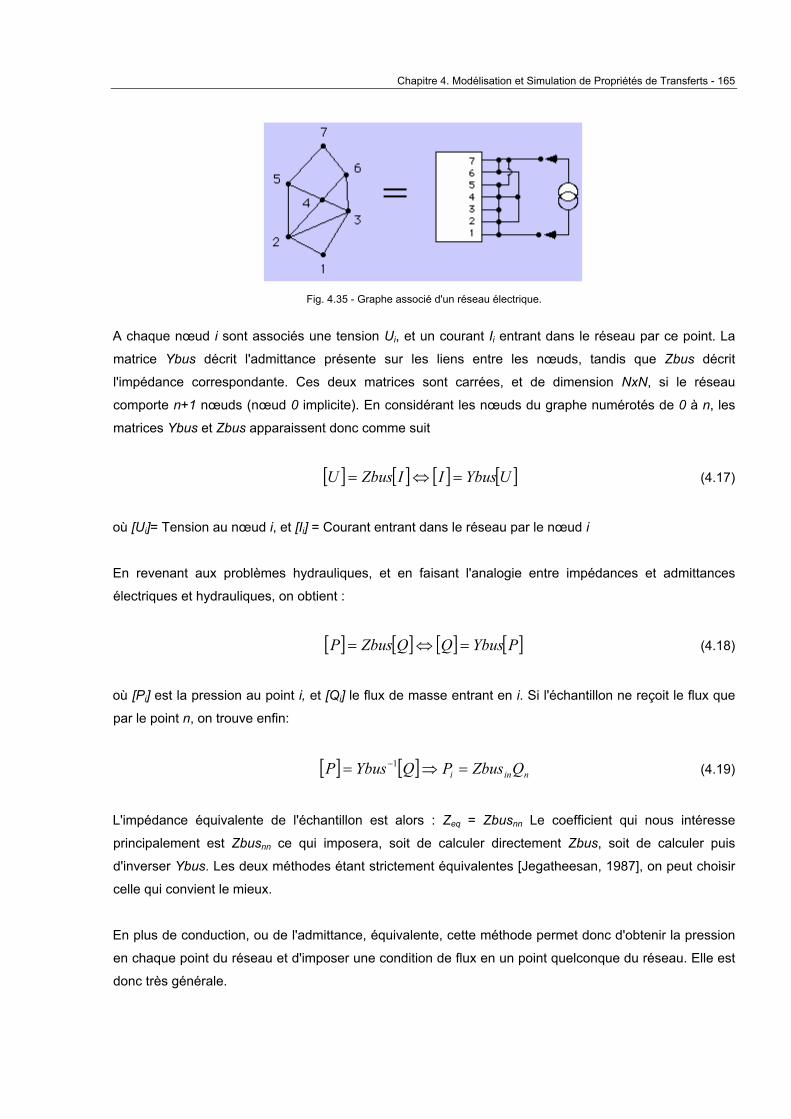
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 165
Fig. 4.35 - Graphe associé d'un réseau électrique.
A chaque nœud i sont associés une tension Ui, et un courant Ii entrant dans le réseau par ce point. La
matrice Ybus décrit l'admittance présente sur les liens entre les nœuds, tandis que Zbus décrit
l'impédance correspondante. Ces deux matrices sont carrées, et de dimension NxN, si le réseau
comporte n+1 nœuds (nœud 0 implicite). En considérant les nœuds du graphe numérotés de 0 à n, les
matrices Ybus et Zbus apparaissent donc comme suit
[ ] [ ] [ ] [ ]UYbusIIZbusU =⇔= (4.17)
où [Ui]= Tension au nœud i, et [Ii] = Courant entrant dans le réseau par le nœud i
En revenant aux problèmes hydrauliques, et en faisant l'analogie entre impédances et admittances
électriques et hydrauliques, on obtient :
[ ] [ ] [ ] [ ]PYbusQQZbusP =⇔= (4.18)
où [Pi] est la pression au point i, et [Qi] le flux de masse entrant en i. Si l'échantillon ne reçoit le flux que
par le point n, on trouve enfin:
[ ] [ ] nini QZbusPQYbusP =⇒= −1 (4.19)
L'impédance équivalente de l'échantillon est alors : Zeq = Zbusnn Le coefficient qui nous intéresse
principalement est Zbusnn ce qui imposera, soit de calculer directement Zbus, soit de calculer puis
d'inverser Ybus. Les deux méthodes étant strictement équivalentes [Jegatheesan, 1987], on peut choisir
celle qui convient le mieux.
En plus de conduction, ou de l'admittance, équivalente, cette méthode permet donc d'obtenir la pression
en chaque point du réseau et d'imposer une condition de flux en un point quelconque du réseau. Elle est
donc très générale.
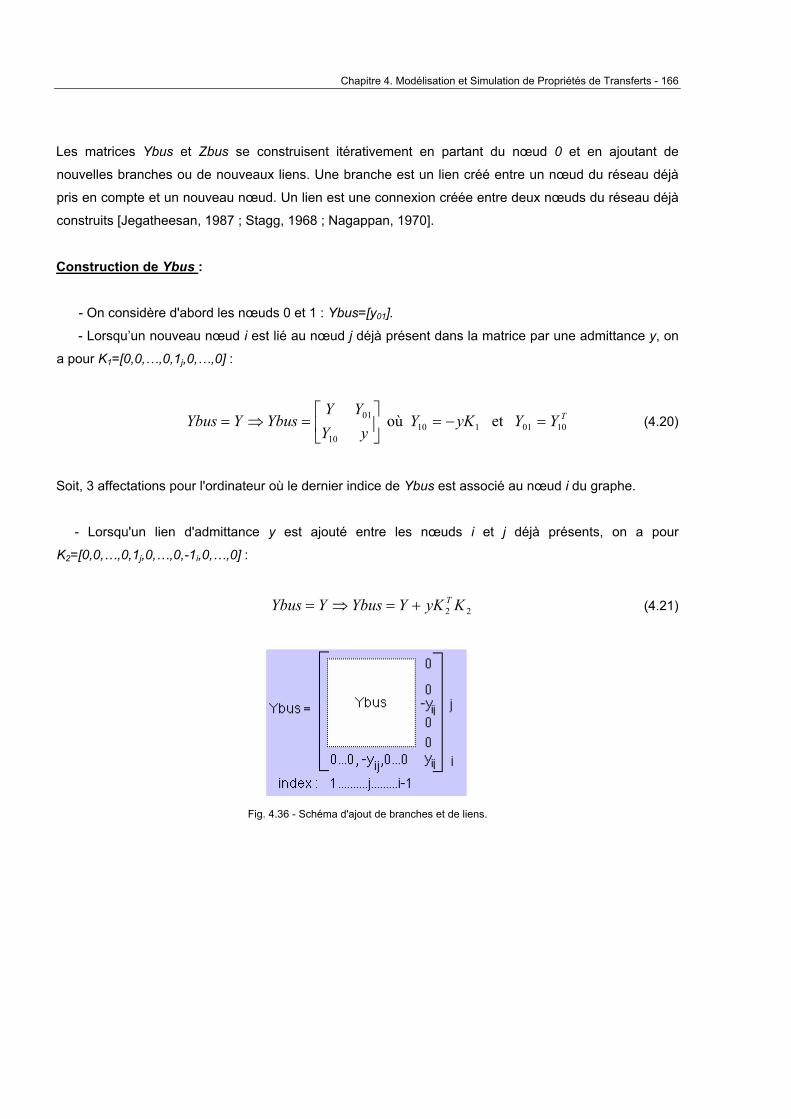
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 166
Les matrices Ybus et Zbus se construisent itérativement en partant du nœud 0 et en ajoutant de
nouvelles branches ou de nouveaux liens. Une branche est un lien créé entre un nœud du réseau déjà
pris en compte et un nouveau nœud. Un lien est une connexion créée entre deux nœuds du réseau déjà
construits [Jegatheesan, 1987 ; Stagg, 1968 ; Nagappan, 1970].
Construction de Ybus :
- On considère d'abord les nœuds 0 et 1 : Ybus=[y01].
- Lorsqu’un nouveau nœud i est lié au nœud j déjà présent dans la matrice par une admittance y, on
a pour K1=[0,0,…,0,1j,0,…,0] :
TYYyKYyY
YYYbusYYbus 1001110
10
01 et où =−=
=⇒= (4.20)
Soit, 3 affectations pour l'ordinateur où le dernier indice de Ybus est associé au nœud i du graphe.
- Lorsqu'un lien d'admittance y est ajouté entre les nœuds i et j déjà présents, on a pour
K2=[0,0,…,0,1j,0,…,0,-1i,0,…,0] :
22 KyKYYbusYYbus T+=⇒= (4.21)
Fig. 4.36 - Schéma d'ajout de branches et de liens.

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 167
Construction de Zbus :
- Comme pour Ybus, on considère d'abord les nœuds 0 et 1 : Zbus = [z01]
- Pour greffer une branche liant le nœud j au nouveau point i via l'impédance z, on calcule pour
K1=[0,0,…,0,1j,0,…,0] :
TT ZKKzZZzKZzZZZ
ZbusZZbus111111001110
1110
01 et et où ==−=
=⇒= (4.22)
Le dernier indice de Zbus est associé au nœud i du réseau.
- Enfin, pour ajouter un lien d'impédance z entre les points i et j du réseau déjà construit, on a pour
K2=[0,0,…,0,1j,0,…,0,-1i,0,…,0] :
zZKKZKZKZZbusZZbus T
T
+−=⇒=
22
22 (4.23)
Parmi ces deux possibilités, Ybus et Zbus, Ybus présente l'avantage d'une formation plus rapide.
L'aspect "symétrique, réel et très creux" de Ybus apparaît lors de sa construction. En effet,
géométriquement elle a exactement la même forme que la matrice descriptive du graphe MR. Si l'un des
éléments de la matrice du graphe est nul, le même élément de Ybus est également nul. De plus, si MR
est symétrique, Ybus l'est aussi.
En plus de l'économie en place mémoire que représente Ybus par rapport à Zbus, on va voir que la
géométrie particulière de cette matrice permet une diminution importante du temps nécessaire à son
inversion, rendant le calcul de Zeq plus rapide par le calcul et l'inversion de Ybus que par le calcul direct
de Zbus.
4.3.3 Résolution numérique optimisée : décomposition LU
Comme la formation de Zbus est incompressible en nombre d'opérations et que celle de Ybus est très
rapide, nous avons choisi de ne plus utiliser que Ybus en se concentrant sur l'accélération de l'inversion
matricielle. L'inversion matricielle utilisée est basée sur la décomposition LU [Press, 1992]. Le principe
de la décomposition LU repose sur la résolution successive de deux systèmes plus simples que le
système initial. Si L est une matrice triangulaire inférieure et U une matrice triangulaire supérieure, on
montre que pour toute matrice inversible M, on peut trouver L et U uniques telles que:

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 168
ULM ×= (4.24)
Si L et U sont connues, résoudre :
YXM =× (4.25)
revient à calculer :
XUZYZL ×==× avec (4.26)
On trouve X simplement par :
ZUXYLZ ×=×= −− 11 avec (4.27)
La méthode LU s'effectue en deux étapes: calcul des coefficients de L et U, puis inversion de ces deux
matrices. L'inversion de matrices triangulaires, même de grande taille, ne nécessite que quelques
secondes, si bien que le calcul des coefficients de L et U est le facteur limitant.
On calcule par Ybus l'impédance équivalente du réseau ainsi formé, entre un nœud du bord supérieur du
volume et un nœud du bord inférieur (tous les nœuds de ces bords étant reliés entre eux par une
impédance nulle pour respecter la condition de bords équipotentiels). Le résultat de ces calculs est une
impédance électrique qu'on peut relier à la conductance hydraulique par
éqGYbus 11 =− (4.28)
4.3.4 Sensibilité géométrique
La méthode d'estimation de la conductivité équivalente Keq à partir de l'analogie électrique sur le GLMG a
été appliquée sur trois exemples numériques pour l'évaluation de la sensibilité de la méthode aux
changements de la structure poreuse. Le fluide utilisé est l'eau avec une échelle fictive pour le voxel
de 100 µm (0,0001m). Un milieu exemple (cube 3x3x3 voxel : Figure 4.37) est traversé pour un tube de
diamètre 1 voxel dans l'espace discret avec une porosité ε = 0,11 (1x1x3 voxel). Au travers de la
représentation de la matrice associée du GLMG (Figure 4.37.b, nœuds de diamètre 1 voxel) et de la
construction de Ybus, nous avons obtenu la conductance Géq=7,94x10-8 m2.s. Pour une longueur Lv =
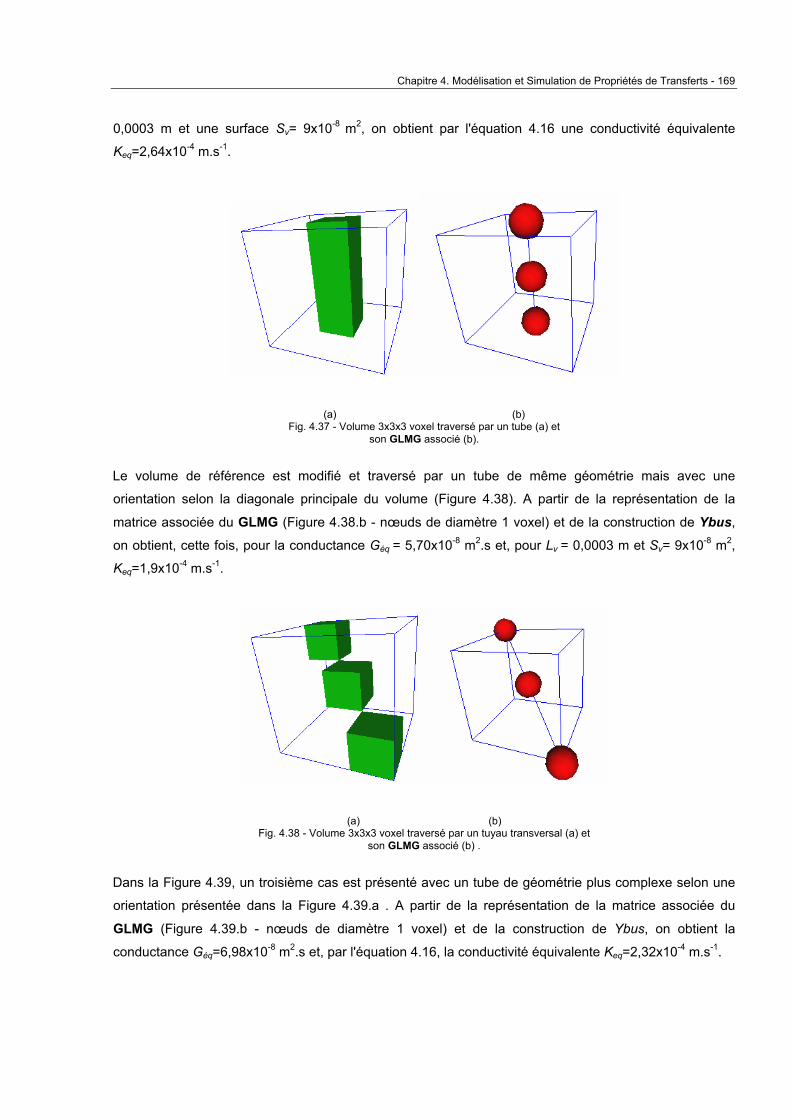
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 169
0,0003 m et une surface Sv= 9x10-8 m2, on obtient par l'équation 4.16 une conductivité équivalente
Keq=2,64x10-4 m.s-1.
(a) (b) Fig. 4.37 - Volume 3x3x3 voxel traversé par un tube (a) et
son GLMG associé (b).
Le volume de référence est modifié et traversé par un tube de même géométrie mais avec une
orientation selon la diagonale principale du volume (Figure 4.38). A partir de la représentation de la
matrice associée du GLMG (Figure 4.38.b - nœuds de diamètre 1 voxel) et de la construction de Ybus,
on obtient, cette fois, pour la conductance Géq = 5,70x10-8 m2.s et, pour Lv = 0,0003 m et Sv= 9x10-8 m2,
Keq=1,9x10-4 m.s-1.
(a) (b) Fig. 4.38 - Volume 3x3x3 voxel traversé par un tuyau transversal (a) et
son GLMG associé (b) .
Dans la Figure 4.39, un troisième cas est présenté avec un tube de géométrie plus complexe selon une
orientation présentée dans la Figure 4.39.a . A partir de la représentation de la matrice associée du
GLMG (Figure 4.39.b - nœuds de diamètre 1 voxel) et de la construction de Ybus, on obtient la
conductance Géq=6,98x10-8 m2.s et, par l'équation 4.16, la conductivité équivalente Keq=2,32x10-4 m.s-1.

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 170
(a) (b)
Fig. 4.39 - Volume 3x3x3 voxel traversé par un tuyau (a) et son GLMG associé (b) .
Ainsi, on observe que les résultats obtenus par analogie électrique appliquée à la représentation
graphique de la géométrie du milieu sont sensibles aux changements structuraux du milieu.
4.3.5 Estimation de K pour les échantillons numériques
La méthode d’estimation de la conductivité hydraulique K à la saturation par analogie électrique a été
utilisée pour permettre la comparaison entre le volume Gaussien et le Gaussien Fissuré. Le squelette
utilisé pour l'extraction de la représentation GLMG dans les deux analyses est la LMVFn (introduits dans
le chapitre §2). La taille caractéristique du milieu utilisé est réduite (64x64x64 voxel) pour rester
compatible avec la capacité informatique dont nous disposions1. Cette taille de matrice est liée au
processus de décomposition LU en fonction du nombre de nœuds du graphe. Le fluide utilisé est l'eau
avec une échelle fictive pour le voxel de 20 µm.
La Figure 4.40 présente le GLMG pour le milieu Gaussien (porosité ε =0,36) pour une taille
caractéristique du volume de 64x64x64 voxel (Sv =1,63x10-6 m2 et Lv =1,28x10-3 m). Le nombre de
nœuds sur le GLMG est 1429 pour une quantité de liens de 4314. A partir de la représentation de la
matrice associée et de la construction de Ybus, on obtient pour la conductance Géq = 21,9x10-8 m2. et par
l'équation 4.16 la conductivité équivalente Keq = 11,2x10-5 m.s-1.
La Figure 4.41 présente le GLMG pour le milieu Gaussien Fissuré pour une taille caractéristique du
volume de 64x64x64 voxel. La porosité est ε=0,40, où le nombre de nœuds sur le GLMG est 2188 pour
une quantité de liens de 11259. A partir de la représentation de la matrice associée et de la construction
de Ybus, on obtient pour la conductance Géq = 6,19x10-8 m2.s. et Keq = 4,8x10-5 m.s-1.
1 La capacité informatique disponible pour ce travail a été d’approximativement deux matrices de 2500 nœuds, ce qui représente une capacité de mémoire en Point Fluctuante de la station de travail Sun SparkStation 5 (année 1993) sous SUNOS.4.1.3 avec 64MBytes de mémoire.
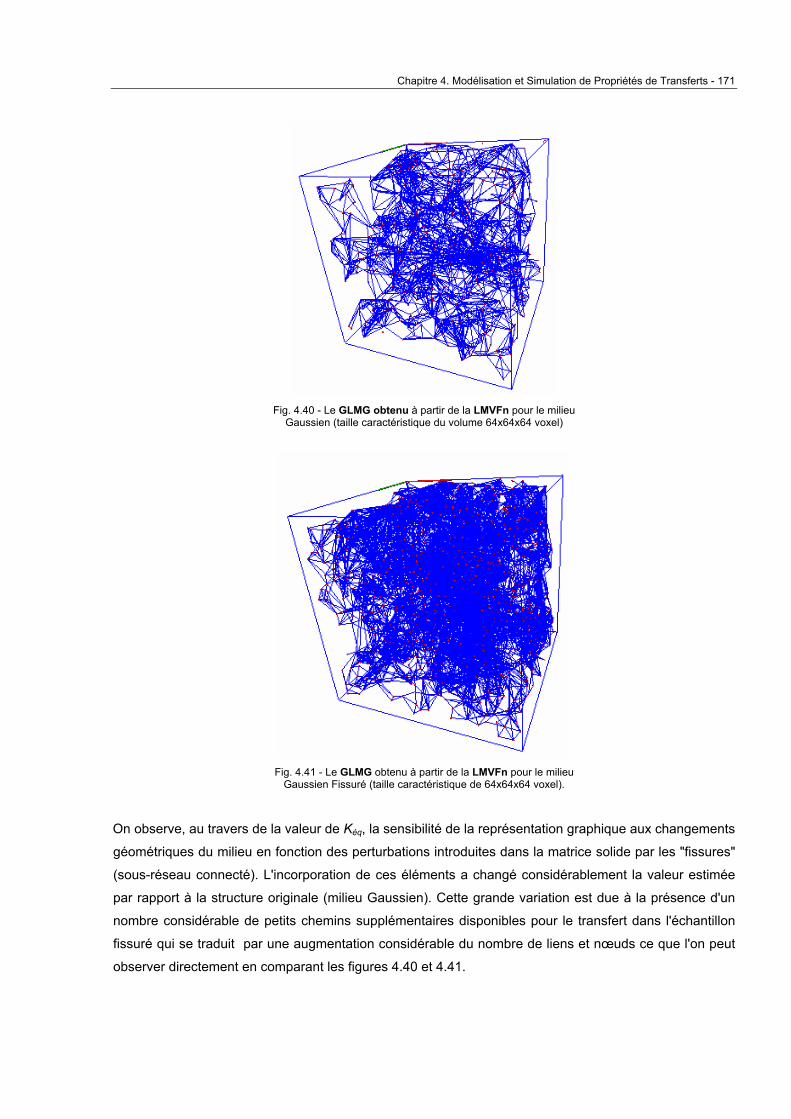
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 171
Fig. 4.40 - Le GLMG obtenu à partir de la LMVFn pour le milieu
Gaussien (taille caractéristique du volume 64x64x64 voxel)
Fig. 4.41 - Le GLMG obtenu à partir de la LMVFn pour le milieu
Gaussien Fissuré (taille caractéristique de 64x64x64 voxel).
On observe, au travers de la valeur de Kéq, la sensibilité de la représentation graphique aux changements
géométriques du milieu en fonction des perturbations introduites dans la matrice solide par les "fissures"
(sous-réseau connecté). L'incorporation de ces éléments a changé considérablement la valeur estimée
par rapport à la structure originale (milieu Gaussien). Cette grande variation est due à la présence d'un
nombre considérable de petits chemins supplémentaires disponibles pour le transfert dans l'échantillon
fissuré qui se traduit par une augmentation considérable du nombre de liens et nœuds ce que l'on peut
observer directement en comparant les figures 4.40 et 4.41.

Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 172
Chapitre 4. Modélisation et Simulation de Propriétés de Transferts - 173
4.1 INTRODUCTION 133 4.2 METHODE GEOMETRIQUE : SIMULATION DE L 'INTRUSION ET DE L’EXTRUSION D'UN FLUIDE NON-MOUILLANT 134
4.2.1 Présentation de la méthode 134 4.2.2 Limitations 137 4.2.3 L’intrusion et l'extrusion d'un fluide non-mouillant dans les sections 2D 137 4.2.4 Intrusion et extrusion d'un fluide non-mouillant en 3D 146 4.2.5 Distribution de la taille de pores en 3D 157
4.3 METHODE MATRICIELLE : ESTIMATION DE LA PERMEABILITE SUR LE GLMG 160 4.3.1 La matrice de représentation du graphe - MR 163 4.3.2 Analogie électrique : les Matrices YBus 164 4.3.3 Résolution numérique optimisée : décomposition LU 167 4.3.4 Sensibilité géométrique 168 4.3.5 Estimation de K pour les échantillons numériques 170

Conclusion Générale - 173
Conclusion Générale

Conclusion Générale - 174
Conclusion Générale - 175
Un milieu poreux est une structure complexe composée d'un squelette solide et d'un réseau lacunaire :
la porosité. Ce dernier espace est le lieu où se produisent de nombreuses interactions physico-
chimiques (absorption/désorption de vapeur, effets capillaires…) et les phénomènes de transfert
hydriques ou thermiques. L'étude et la modélisation de ces phénomènes suppose le choix d'une échelle
pertinente de description géométrique du milieu. En particulier, le concept de topologie – arrangement
d'objets dans l'espace - apparaît comme essentiel pour décrire l'organisation de la connexion entre les
éléments de la structure poreuses, par exemple en termes de "sites" et de liens" avec, le cas échéant,
des perturbations à une échelle supérieure de type "fissures".
Nous avons retenu le concept de squelette codé par la ligne médiane sur des sections ("LM") ou
volumique ("LMV") pour décrire ces structures en utilisant, de plus, les outils de la géométrie discrète.
En effet, on peut ainsi conserver une fidélité aux structures réelles proche de celle obtenue en
géométrie euclidienne classique tout en optimisant les traitements informatiques liés à une arithmétique
entière.
Deux techniques d’amélioration de la LMV ont été introduites : d'une part, le concept de squelette
orthogonal aux bords "LMVn" et, d'autre part, une line médiane filtrée "LMVF" avec conservation de
l'information topologique. La composition de ces deux techniques permet d'obtenir un puissant
opérateur de description de forme, très général, que nous avons naturellement appelé "LMVFn" pour
"Ligne Médiane Volumique Filtrée Normale". C'est cet opérateur que nous avons mis en œuvre pour
simuler le transfert de fluides dans des structures poreuses. Les squelettes ainsi obtenus peut être
ensuite décomposés et analysés pour être finalement décrits sous forme de graphes.
Toujours à partir des concepts de la géométrie discrète, nous avons d'abord développé des techniques
de génération numérique de structures capables de reproduire des propriétés statistiques à l'échelle
macroscopique. L'analyse morphologique – caractérisation de formes et de tailles - de ces structures
permet d’obtenir la granulométrie par ouvertures successives en 3D et d'autres paramètres d'intérêt
comme : l'élément de volume représentatif (VER), la porosité, surface spécifique, etc… Là encore, nous
avons implémenté ces outils en utilisant des masques de chanfrein pour simuler la distance euclidienne.
L'analyse de VER avec les paramètres volumiques et surfaciques – pour les structures modèles
générées et aux échelles prises en compte – est confirmée par les mesures directes de granulométrie
et de distribution de diamètres de pores. Sur ces cas, on vérifie bien qu'il y a conservation de la
morphologie entre sections d'un volume et le volume correspondant.
Nous avons ensuite développé le concept de surface topologique pour construire un modèle de
connexion entre les éléments du réseau de pores, ou de grains, qui permet la caractérisation et la
comparaison de la topologie entre milieux statistiquement identiques en termes de : porosité,

Conclusion Générale - 176
distribution granulométrique, distribution de diamètres de pores… Les paramètres topologiques
développés sont basés sur les squelettes structuraux pondérés LMVFn - LMV et leur représentation
sous forme de graphe (GLMG). Ces méthodes discrètes d'analyse de la topologie de l'espace nous ont
permis de mettre en évidence l'importance de la topologie pour différencier des structures
morphologiquement identiques. Des mesures effectuées sur des échantillons numériques réguliers et
irréguliers comportant un réseau connecté nous ont montré que l'information topologique mesurée dans
les différentes sections d'un volume n'est pas capable de reproduire la complexité structurale dans le
volume lui-même. Des phénomènes liés à la topologie du milieu – comme le transfert d'un fluide, par
exemple – doivent donc être directement étudiés en 3D.
L'analyse d'un milieu "fissuré" à partir d'une structure connue a, par ailleurs, montré l'importance d'un
changement global de la topologie de la structure même si celui-ci reste faible et/ou s'il y a conservation
d'une morphologie initiale pour une des phases. La méthode géométrique de simulation des transferts
que nous proposons est donc un outil très sensible, notamment à l'existence d'un sous-réseau de type
"fissures".
Les développements informatiques réalisés dans le cadre de ce travail et le partenariat que nous avons
pu établir avec d'autres chercheurs (CEN-Météo-France1, TIMC/Infodis2-IMAG) montrent que les outils
d'analyse d'image dérivés de l'application de la géométrie discrète permettent effectivement d'améliorer
les méthodes géométriques de simulation de transferts dans des structures complexes.
La perspective principale de ce travail est l'application des outils développés et validés sur des
échantillons numériques à des échantillons réels obtenus par imagerie 3D (imagerie X au Synchrotron,
par exemple). Par ailleurs, il faudra disposer de mesures directes de propriétés de transfert pour les
comparer avec les résultats de nos techniques de simulation. A plus long terme, l'étude du rapport entre
les topologies de section et de volume pourrait sans doute être avantageusement réalisée en faisant
appel à des techniques de reconstruction volumique basées sur des méthodes de traitement de signal
comme les ondelettes discrètes. Par ailleurs, l'amélioration des masques de chanfrein utilisés en 3D
pourrait aussi améliorer la qualité des descripteurs de la forme : épaisseur, centrage des squelettes…
Enfin, il serait souhaitable d'introduire dans nos outils un mode de représentation multi-échelle pour
améliorer la qualité des estimations dont il faudrait également évaluer l'incertitude en fonction des
traitements numériques appliqués.
1 Centre d'Etude de la Neige, St. Martin d'Hères, J.D. Brzoska. 2 Informatique et Formes Discrètes, A. Montanvert, E. Thiel.
Bibliographie - 177
Bibliographie

Bibliographie - 178

Bibliographie - 179
Adler, P.M. (1992) - "Porous Media: Geometry and Transports". Ed. Butterworth- Heinemann, Series in Chemical Engineering. Adler, P.M.; Thovert, J.F.(1993) - "Fractal Porous Media". Transport in Porous Media, Kluwer Academic Publishers, 12:41-78 . Adler, P.M.; Jacquin, C.G.; Thovert, J.F.(1992) - "The Formation Factor of Reconstructed Porous Media". Water Resources Research, 287(6):1571-1576. Adler, P. M.; Jacquin, C. G.; Quiblier, J. A (1990). "Flow in Simulated Porous Media". Int J. Multiphase Flow, 16:691-712. Adenot, F.; Auvray, L.; Touray, J. C. (1993) - "Analyse de la Dimension Fractale D’agrégats de Csh (Silicates de Calcium Hydratés) de Compositions et de Modes de Fabrication Différents. Implications pour Les Etudes de Durabilité des Pâtes de Ciment". C.R. Academic Science Paris, T.317, Série Ii:185-189. Als-Nielsen, J.; Materlik, G. (1995) - "Recent Applications of X Rays in Condensed Matter Physics". Physics Today, American Institute of Physics, 11:34-40. Anguy, Y. (1993) - "Application de la Prise de Moyenne Volumique A L'étude de la Relation Entre Le Tenseur de Perméabilité et la Microgéométrie des Milieux Poreux Naturels". Thèse de Doctorat, Université Bordeaux I, Bordeaux, :90. Appoloni, C.R.; Cesareo, R. (1994) - "Microscaning and Microtomography With X-Ray Tubes". Rapport de Recherche 04.94, Universita Degli Studi Di Roma - Cisb, :83. Arcelli, C. (1981) - "Pattern Thinning by Contour Tracing". Computer Graphics and Image Processing, 17:130-144. Arcelli, C.; Di Baja, G.S. (1985) - "A Width-Independent Fast Thinning Algorithm". IEEE Transactions on Pattern Analisys and Machine Intelligence, Pami-7(4):463-474. Arya, L.M.; Bernard, D. (1991) "A Physicoempirical Model to Predict The Soil Moisture Characteristic From Particle-Size Distribution and Bulk Density Data". Soil Science Society America Journal, 45(1):1023-1030. Attali, D.; Bertolino, P.; Montanvert, A. (1994) - "Using Polyballs to Approximate Shapes and Skeletons". Dans Le 12th Icpr, 1:626-628. Austen, S. (1964) - "Matrix and Tensor Analysis in Electrical Network Theory". Ed. Mcdonald. Bachmat, Y.; Bear, J. (1986) - "Macroscopic Modelling of Transport Phenomena in Porous Media; 1: The Contiunum Approach". Transport in Porous Media, Kluwer Academic Publishers, 1: 213-240; Barr, S. (1987) - "Experiences de Topologie". Lysimaque Diffusion Berlin. Barret, E.P.; Joyner, L.G.; Halenda, P.P. (1951) - "The Determination of The Pore Volume and Area Distributions in Porous Substances - Computations from Nitrogen Isotherms". Journal of The American Chemical Society, 73:373. Baveye, P.; Sposito, G. (1984) - "The Operational Significance of The Continuum Hypothesis in The Theory of Water Mouvement Through Soils and Aquifers". Water Resources Research, 20 (5):74-102. Bentz, D.P.; Martys, N.S. (1994) - “Hydraulic Radius and Transport in Reconstructed Model Three-Dimensional Porous Media”, Transport in Porous Media, Kluwer Academic Publishers, 17:221-238.

Bibliographie - 180
Bentz, D.P.; Quenard,D. A.;Baroghel-Bouny, V.; Garboczi, E.J.; Jennings, H.M. (1995) - “Modelling Drying Shrinkage of Cement Paste and Mortar”, Part 1. Structural Models From Nanometres to Millimetres, Materials and Structures, 28: 450-458 Bertin, E. (1994) - "Diagrammes de Voronoi 2D et 3D: Applications en Analyse D'images". Thèse de Doctorat, Institut de Mathématique Appliquée - IMAG - Grenoble. Boissonat, J.D.; Geiger, B. (1992) - "Three Dimensional Reconstruction of Complex Shapes Based on The Delaunay Triangulation". INRIA - Rapport de Recherche N°1697, :18. Borgefors (1984) - "Distance Transformations in Arbitrary Dimensions". Computer VIsion, Graphics and Image Processing, 27:321-345. Borianne, Ph.; Francon, J. (1994) - " Reversible Polyhedrization of Discrete Volume". 4th Dgci - Grenoble, :157-168. Blum, H. (1967) - " A Transformation for Extracting New Descriptors of Shape. Ed. W. Wathendunn, Models for The Perception of Speech and VIsual Form :362-380. Brunauer, S.; Emmett, P.H.; Teller, E. (1938) - "Adsorption of Gases in Multi-Molecular Layers". Journal of American Chemical Society, 60:309. Brooks, R.H.; Corey, A.T. (1964) - "Hydraulic Properities of Porous Media". Hydrol. Pap.3 Colorado State University. Castleman, K.R. (1979) - "Digital Image Processing". Prentice-Hall. Coquin, D.; Chehadeh, Y.; Bolon, Ph. (1994) - "3D Local Distance Operator on Parallelepipedic Grids". 4th Dgci - Grenoble, :147-156. Chassery, J.M. (1996) -"Medical Image Processing, Biomodelling, Cognition" Rapport D'activités 1994-1995, Timc, IMAG-Grenoble, :58. Chassery, J.M.; Montanvert, A. (1991) - "Géométrie Discréte en Analyse D'images". Editions Hermes. Chaix, J. M. (1992) - "Analysis of The Conduction Properities of Two Phase Materials From Image Analysis Methods". Proceedings 8 Ics - Acta Stereol, :539-544. Chatzis, I.; Dullien, F. (1982) - " Mise en Ouvre de la Théorie de la Percolation pour Modéliser Le Drainage des Milieux Poreux et la Perméabilité Relative Au Liquide Non-Mouillant Injecté". Revue de L'institut Français du Pétrole, 37(2):183-205. Chen, W.K. (1997) - "Graph Theory and its Engineering Applications". Advanced Series in Electrical and Computer Engineering, World Scientific - Vol.5. Coleman, G.B.; Andrews, H.C. (1979) - "Image Segmentation by Clustering". Proceedings of The IEEE, 67(5). Coster, M.; Chermant, J. L. (1989) - "Précis D'analyse D'images". Presses du CNRS. Crawford, J.W. (1994) - “The Relationship Between Structure and The Hydraulic Conductivity of Soil”, European Journal of Soil Science, 45:493-502. Da Cunha Neto, J. A. B. (1992) - "Transport D'humidité en Matériau Poreux en Présence d'un Gradient de Température. Caractérisation Expérimentale D'un Béton Cellulaire". Thèse de Doctorat, Université Joseph Fourier - Grenoble, :194.

Bibliographie - 181
Daian, J. F. (1986) - "Processus de Condensation et de Transfert D'eau Dans Un Matériau Meso et Macroporeux. Etude Expérimental du Mortier de Ciment". Thèse Docteur-Es-Sciences Physique, Université Scientifique, Technologique et Médicale de Grenoble, :319. Daian, J. F. (1992) - “From Pore-Size Distribution to Moisture Transport Properties: Particular Problems for Large Pore-Size Distributions”, Drying ‘92 - Elsevier Science Publishers B.V., :263-282 Daian, J.F.; Saliba, J. ( 1991) - "Détermination D'un Réseau Aléatoire de Pores pour Modéliser la Sorption et la Migration D'humidité Dans Un Mortier de Ciment". International Journal of Heat and Mass Transfert, 34 (8):2081-2096. Daian, J. F.; Ke X.; Quenard D.(1994) - “Invasion and Transport Processes in Multiscale Model Structures for Porous Media”, Characterization of Porous Solids III - Studies in Surface Science and Catalysis - Elsevier Science B.V., 87:187-196 Danis, J.F.; Quintard, M. (1984) - "Modélisation D'un Ecoulement Diphasique Dans Une Succession de Pores". Revue de L'institut du Pétroleo, 39(1):37-46. David, C.; Darot,M. (1993) - “Pore Structures and Transport Properties of Sandstone”. Transport in Porous Media, Kluwer Academic Publishers, 11:161-177 Debled-Rennesson, I.; Reveilles, J.P. (1997) - "An Incremental Algorithm for Digital Plane Recognition". 4th Dgci - Grenoble, :207-222. Declerck, J.; Subsol, G.; Thirion, J.P.; Ayache, N. (1995) - " Automatic Retrieval of Anatomical Structures in 3D Medical Images". INRIA - Rapport de Recherche N°2485, :29. Diaz, C.E.; Chatzis, I.; Dullien, F.A.L. (1987) - "Simulation of Capillary Pressure Curves Using Bond Correlated Site Percolation on A Simple Cubic Network". Transport in Porous Media, Kluwer Academic Publishers, 2: 215-240. Dullien, F.A.L. (1991) - “Characterization of Porous Media - Pore Level". Transport in Porous Media, Kluwer Academic Publishers, 6:581-606 Eggleston, J.R.; Peirce, J.J. (1995) - “Dynamic Programming Analysis of Pore Space”, European Journal of Soil Sciences, 46:581-590 Essam, J. W. (1980) - "Percolation Theory". Rep. Prog. Phys. 43:833-912. Fatt, I. (1956) - "The Network Model of Porous Media". I, II, III, Transactions Aime, 207, 1:44-177. Ferreol, B.; Rothman, D.H. (1995) - “Lattice-Boltzmann Simulations of Flow Through Fontainebleau Sandstone". Transport in Porous Media, Kluwer Academic Publishers, 20:3-20. Fernandes, C.P. (1990) - "Estudo Dos Processos de Condensação E Migração de Umidade Em Meios Porosos Consolidados. Análise Experimental de Uma Argamassa de Cal E Cimento". Memoire de Master of Science, CPGMEC-UFSC, Florianópolis. Fernandes, C.P. (1994) - "Caracterização Morfo-Topológica de Espaços Porosos: Reconstituição Multi-Escala E Simulação de Processos de Invasão de Fluidos Não-Molhantes". Thèse de Doctorat - Cpgemc, UFSC, Florianópolis. Fernandez-VIdal, S.; Malandain, G. (1996) - "Squelettes Euclidiens D'objets Discrets N-Dimensionnels". INRIA - Rapport de Recherche N°2771, :25. Fernandes, C.P.; Magnani, F.S.; Philippi, P.C.; Daian, J.F. (1996) - “Multiscale Geometrical

Bibliographie - 182
Reconstruction of Porous Structures” Physical Review, The American Physical Society, Vol. 54. Franc, D.J.; Lobb, C.J. (1988) - "Highly Efficient Algorithm for Percolative Transport Studies in Two Dimensions". Physical Review, The American Physical Society, Vol. 37(1):302-307. Frendo-Rosso, C. (1991) - "Utilisation de Réseaux Irréguliers pour la Modélisation de la Relation Structure/Conductivité Thermique du Béton Cellulaire Autoclave". Rapport de Stage de Fin D'études - LTHE-IMG, Grenoble. Frish, U.; D'humieres, D. (1987) - "Lattice Gas Hydrodynamics in Two and Three Dimensions". Complex Systems, 1:649-707. Gandola, F. (1998) - "Etude Expérimentale et Numérique des Phénomènes D'infiltration en Condition D'axi-Symetrie en Milieu Non-Saturé". Thèse de Doctorat, Université Joseph Fourier - Grenoble (A Paraître). Ganoulis, J.G. (1989) - "Multiphase Flow in Porous Media: Description At The Pore and Macroscopic Scale". Unsaturated Flow in Hydrologic Modeling, Nato Asi Series, :27-52. Guéguen, Y.; Palciauskas, V. (1993) - "Introduction A la Physique des Roches". Ed. Hermann. Giona M.; Adrover A.(1994) - “Local Porosity Analysis of Disordered Porous Matrices” Characterization of Porous Solids III - Studies in Surface Science and Catalysis - Elsevier Science B.V., 87:197-206. Godau, H.A.M.; Whitesides, S. (1995) - "Universal 3-Dimensional VIsibility Representation for Graphs". INRIA - Rapport de Recherche N°2622, :18. Gondran, M.; Minoux M. (1995) - "Graphes et Algorithmes". Editions Eyrolles. Guyon, E.; Troadec, J. P. (1994) - "du Sac de Billes Au Tas de Sable". Editions Odile Jacob - Sciences. Jegatheesan, R. (1987) - "A New Development of Bus Impedance Building Algorithm Closely Related to Bus Admittance Matrix". Electric Machines and Power Systems, Hemisphere Publishing Corporation, 12:43-56. Haddon, J.F.; Boyce, J.F. (1990) - "Unification of Image Segmentation and Edge Detection". IEEE Proceedings, 137( 3). Hainsworth, T.J.; Mardia, K.V. (1988) - "A Spatial Thresholding Method for Image Segmentation". IEEE Transactions on S.M.C, Vol. Smc-10 (6). Hammecker, C.; Mertz, J.D.; Fischer, C.; Jeannette, D. (1993) - “A Geometrical Model for Numerical Simulation of Capillary Imbibition in Sedimentary Rocks". Transport in Porous Media, Kluwer Academic Publishers, 12:125-141. Hallaire, V.; Curmi, P. (1992) - “Image Analysis of Morphological Pore Characterizaton of Soils Sections in Relation to Water Movement”, Proceedings of The 9th International Working Meeting on Soil Micromorphology - Australia. Harmathy, T.Z., (1967) - "Moisture Sorption of Buildings Materials". National Research Council of Canada, Division of Building Research, Technical Paper N° 242, :26. Haverkamp, R.; Parlange, J.Y.; Cuenca, R.; Ross, P.J.; Steenhuis, T. (1997) - "On The Theory of Scaling of The Vadose Zone Water Flow Equation". Invited Chapter in The Book: Scale Invariance and Scale Dependence in Hydrology. Hazlett, R.D. (1995) - “Simulation of Capillary-Dominated Displacements in Microtomoaraphic Images of

Bibliographie - 183
Reservoir Rocks". Transport in Porous Media, Kluwer Academic Publishers, 20:21-35. Hendee, W.R. (1995) - "X Rays in Medicine". Physics Today, American Institute of Physics, 11:51-56. Hinrichsen, E. L. ; Aharony, A.; Feder, J.; Hansen, A.; Jossang, T. (1993) - “A Fast Algorithm for Estimating Large-Scale Permeabilities of Correlated Anisotropic Media". Transport in Porous Media, Kluwer Academic Publishers, 12:55-72. Hoshen, J.; Kopelman, R. (1976) - "Percolation and Cluster Distribution. I.- Cluster Multiple Labeling Technique and Critical Concentration Algorithm". Physical Review, The American Physical Society, 14(8):3438-3445. Dehoff, R.T.; Rhines, R.F.N. (1979) - "Microscopie Quantitative". Kantzas, A.; Chatzis, I. (1988) - "Network Simulation of Relative Permeability Curves Using A Bond-Correlated-Site Percolation Model of Pore Structure". Chemical Engineering Communications, 69:191-194. Kaspar, T.C.; Ewing, R.P. (1997) - "Rootedge: Software for Measuring Root Leght From Desktop Scanner Images". Agronomy Journal, 89:932-940. Keller (1989) - "Texture Description and Segmentation Through Fractal Geometry". Computer VIsion Image Processing, 45:150-166. Koppi, A.J.; Bratney, A.B. (1991) - “A Basis for Soil Mesomorphological Analysis”. Journal of Soil Science, 42:139-146. Lagmuir, (1918) - "The Adsorption of Gases on Plane Surfaces of Glass, Mica and Platinum". Journal of American Chemical Society, 40:1361. Lenormand, R.; Zarcone, C. (1985) - "Invasion Percolation in An Etched Network: Measurements of A Fractal Dimension". Physical Review Letters, 54:2226-2232. Laurent, J.P.; Frendo-Rosso, C. (1992) - "Application of Image Analysis to The Estimation of AAC Thermal Conductivity". Advances in Autoclaved Aerated Concrete, Balkerma, :65-69. Laurent, J.P.; Moschetto, C. (1991) - "Une Méthode Optimisée de Granulométrie Par Analyse D'images". Colloque Contrôle Qualité Par VIsion Artificielle - QCVA91, Le Creusot. Maier; R.; Lafdlaw, W. G. (1993) - “Fluid Topology for Invasion Percolation in 3-D Lattices”. Transport in Porous Media, Kluwer Academic Publishers, 10:221-234. Magnani, F.S. (1996) - "Determinaçao Das Configuraçoes de Equilibrio Em Meios Porosos Indeformaveis". Thèse de Doctorat - CPGEMC-UFSC, Florianopolis, Sc. Maliska Junior, C.R. (1996) - "Classes & Objects for Interfacing - Programing Manual - Version 1.0 for The X Window System". ESSS Co. Press, :192. Maliska Junior, C.R. (1996) - "Classes & Objects for Interfacing - VIsualization Manual - Version 1. 0 for The X Window System ". ESSS Co. Press, :93. Maliska Junior, C.R. (1996) - "Classes & Objects for Interfacing - Reference Manual - Version 1. 0 for The X Window System ". ESSS Co. Press, :226. Marion-Poty, V. (1994) - "Approches Parallèles pour la Squeletisation 3D". Thèse de Doctorat, LIP - Ecole Normale Superieure de Lyon, :108.

Bibliographie - 184
Marion-Poty, V. (1994) - "3D Thinning Algorithms on Distributed Memory Machines". Rapport de Recherche 94-01, LIP - Ecole Normale Superieure de Lyon, :18. Martinez-Perez, M.P; Jimenez, J.; Navalon, J.L. (1987) - "A Thinning Algorithm Based on Contours". Computer VIsion, Graphics and Image Processing, 39:186-201. Mecenaney, B.; Mays, T.J. (1994) - “Characterization of Macropores Using Quantitative Microscopy”. Characterization of Porous Solids III - Studies in Surface Science and Catalysis, Elsevier Science B.V., 87:327-337. Meng B. (1994) - “Pore Structure and Moisture Transport in Sandstones: Determination of Relevant Microstructural Properties”. Characterization of Porous Solids III - Studies in Surface Science and Catalysis, Elsevier Science B.V., 87:771-780. Meng, B. (1996) - "Determination and Interpretation of Fractal Properities of The Sandstone Pore System". Materials and Structures , 29:195-205. Metz, F.; Knofel, D. (1992) - "Systematic Mercury Porosimetry Investigations on Sandstones". Materials and Structures, 25:127-136. Montanari, U. (1968) - "A Method for Obtaining Skeletons Using Quasi-Euclidian Distance". Journal of Acm, 15:600-624. Montanvert, A. (1987) - "Contribution Au Traitement de Formes Discretes. Squelettes et Codage Par Graphe de la Ligne Mediane". Thèse de Doctorat de L'université en Informatique, Inpg - Grenoble. Moran, C.J.; Mcbratney, A.B.; Koppi, A.J. (1989) - "A Rapid Method for Analysis of Soil Macropore Structure. I. Specimen Preparation and Digital Binary Image Production". Soil Sciences Soc. Am. Journal, 53:921-928. Moran, C.J.; Mcbratney, A.B. (1992) - "Aquisition and Analysis of Three-Component Images of Soil Pore Structure. I. Method". Journal of Soil Science, 43:541-549. Moran, C.J.; Mcbratney, A.B. (1992) - "Aquisition and Analysis of Three-Component Images of Soil Pore Structure. II. Application to Seed Beds in A Fallow Management Trial". Journal of Soil Science, 43:551-566. Moschetto, C. (1991) - "Caractérisation de la Structure Poreuse des Matériaux Par Analyse D'images: Apport des Distances Discrètes A la Morphologie Mathématique". Rapport de Stage, LTHE, Grenoble, 49. Nagappan (1970) - "Step by Step Formation of Bus Admittance Matrix". IEEE - Transactions on Power Apparatus and Systems, 89(5):813-820 . Neimark, A. V. (1989) - "Multiscale Percolation Systems". Sov. Phys. J., 69(4):786-791. Onody, R.N.; Posadas, A.N.D.; Crestana, S. (1995) - Experimental Studies of The Fingering Phenomena in Two Dimensions and Simulation Using A Modified Invasion Percolation Model". Journal of Applied Physics, 78(5):2970-2976. Otsu, N. (1979) - "A Threshold Selection Method From Gray-Level Histograms". IEEE Transactions on S.M.C, Smc-9(1). Parlar, M.; Yortsos, C. (1988) - "Percolation Theory of Vapor Adsorption-Desorption Processes in Porous Media". J. of Colloid and Interface Science, 124(1):162-176. Peysson, J.P. (1992) - "Implémentation D'un Logiciel de Porosimetrie Par Analyse D'images Sous Unix

Bibliographie - 185
et X-Window". Rapport de Stage de Fin D'études - LTHE-IMG/Grenoble. Pedrini, A.; Philippi, P. C.; Cruz, J. A.; Fernandes, C. P. (1991) - "Caracterização de Meios Porosos". Relatório Técnico 1/91, Siterpa, UFSC, Florianopolis. Perrier, E. (1994) - "Structure Géométrique et Fonctionnement Hydrique des Sols - Simulations Exploratoires". Thèse de Doctorat, Université Pierre et Marie Curie, Paris VI, :202. Perrin, B. (1985) - "Etude des Transferts Couplés de Chaleur et de Masse Dans des Matériaux Poreux Consolidés Non Saturés Utilisés en Génie Civil". Thèse Docteur D'etat, Toulouse, Universite Paul Sabatier de Toulouse, :267. Philip, J. R.; de Vries, D. A. (1957) - "Moisture Mouvement in Porous Material Under Temperature Gradients". Transactions of The American Geophysical Union, 38(2):222-232. Philippi, P. C. (1992) - "Microestrutura Dos Materiais Porosos Usados Em Edificações E Sua Influência Sobre Os Processos de Fixação E Transferência de Umidade". Monografia. Departamento de Eng. Mecânica - Cpgemc - UFSC, Florianopolis. Philippi, C.; Yunes, P.R.; Fernandes, C.P.; Magnani, S. (1994) - “The Microstructure of Porous Building Materials: Study of A Cement and Lime Mortar”. Transport in Porous Media, Kluwer Academic Publishers, 14:219-245. Pieritz, R.A. (1994) - "Desenvolvimento Das Técnicas Do Grafico Da Linha Mediana E Da Binarizaçao Por Regioes Conexas Aplicadas A Caracterizaçao Geométrica de Meios Porosos". Thèse de Master of Science - Cpgemc - UFSC, Florianópolis. Pieritz, R.A. (1995) - "The Generalised Medial Line Graphics Technique in Porous Media Geometry Characterisation". QCVA95 - Le Cresout, :110-118. Pieritz, R.A. (1996) - "Discrete Multiphase Equilibrium Simulation in Porous Media". VI ENCIT /VI LATCYM - Florianopolis, :917-922. Pieritz, R.A.; Philippi, P.C.; Fernandes, C.P. (1993) - "Técnicas de Análise de Imagens No Estudo de Micrografias de Meios Porosos". XXI Enemp-Encontro Nacional de Escoamento Em Meios Porosos. Ouro Preto - Minas Gerais. Pieritz, R.A.; Philippi, P.C.; Fernandes, C.P. (1993) - "Caracterização Da Distribuição de Poros Através Da Análise de Imagens". XXI Enemp-Encontro Nacional de Escoamento Em Meios Porosos. Ouro Preto - Minas Gerais. Pieritz, R.A.; Philippi, P.C. (1993) - "Obtenção Das Funções Distribuição de Sítios E Ligações Para Uso Em Modelos de Percolação Através de Micrografias de Meios Porosos". XXI Enemp-Encontro Nacional de Escoamento Em Meios Porosos. Ouro Preto - Minas Gerais. Pieritz, R.A., Tobias, O.J., Soares, F.A.P. (1994) - "An Approach in Photo Binarization Applied to Porous Media". Proceedings Spring Conference, SEM - Society for Experimental Mechanics, Baltimore. Pieritz, R.A.; Philippi, P.C. (1994) - "An Image Analysis Technique in The Study of Porous Media Micro Structure". Proceedings Spring Conference, SEM - Society for Experimental Mechanics, Baltimore. Plumb O. A.; Plat, M. (1992) - "Microscopic Models for The Study of Drying of Capillary Porous Media". Drying‘92 - Elsevier Science Publishers B.V., :397-406; Posadas, D.A.N; Tannus, A.; Panepucci, H.; Crestana., S. (1996) - "Magnetic Resonance Imaging As A Non-Invasive Technique for Investigating 3D Preferential Flow Occuring Withing Startified Soil Samples". Computers and Electronics in Agriculture, 14:255-267.

Bibliographie - 186
Pratt, W.K. (1991) - "Digital Image Processing". John Willey & Sons. Prat, M. (1993) - “Percolation Model of Drying Under Isothermal Conditions in Porous Media”. Int. J. Multiphase Flow, Pergamon Press Ltd, 19(4):691-704. Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. (1992) - "Numerical Recipes in C". Ed. Cambridge University Press. Quadri, M. B. (1988) - "Dinâmica de Resposta de Tensiômetros: Desenvolvimento Experimental E Modelação Numérica". Thèse de Master of Science - Cpgemc - UFSC, Florianópolis; Quenard, D. (1989) - "Adsorption et Transfert D'humidite Dans Les Materiaux Higroscopiques. Approache du Type Percolation et Experimentation". Thèse de Doctorat, Institut National Polytechnique de Toulouse, Toulouse, :198. Quenard D. A.; Bentz, D.P., Garboczi, E.J. (1992) - “Capillary Condensation, Hysteresis and Image Analysis”. Drying ‘92 - Elsevier Science Publishers B.V., :253-262 Quintard, L. (1993) - “Diffusion in Isotropic and Anisotropic Porous Systems: Three-Dimensional Calculations”. Transport in Porous Media, Kluwer Academic Publishers, :187-199 Quiblier, J. A. (1984) - "A New Three-Dimensional Modeling Technique for Studying Porous Media". Journal of Colloid and Interface Science, 98:84-102. Rolland, F. (1991) - "Représentation Tridimensionnelle et Reconstruction 3D à partir de Coupes 2D". Thèse de Doctorat, Institut de Mathématique Appliquée, Grenoble. Rosenfeld, A.; Pfaltz, J.L. (1966) - "Sequential Operations in Digital Picture Processing". Journal of Acm, 13(4):471-494. Rosenfeld, A.; Davis, L. (1979) - "Image Segmentation and Image Models". Proceedings of The IEEE, 67(5). Rosenfeld, A.; Kak, A.C. (1986) - "Digital Image Processing". Academin Press. Rutovitz, D. (1966) - "Pattern Recognition". Journal of Statis., 129:504-530. Saliba, J. (1990) - "Propriétés de Transfert Hydrique du Mortier de Ciment: Modélisation A L'échelle Microscopique; Etude A L'échelle Macroscopique des Effets Dynamiques des Hétérogénéités". Thèse de Doctorat, Université Joseph Fourier - Grenoble, :172. Salles, J., Thovert, J.F., Adler, P.M. (1994) - “Transports in Reconstructed Porous Media” Characterization of Porous Solids III - Studies in Surface Science and Catalysis - Elsevier Science B.V., 87:211-223; Sarkar; Chaudhvri (1992) - "An Efficient Approach to Estimate Fractal Dimension of Textural Images". Pattern Recognition, 25(9):1035-1041. Serra, J. (1982) - "Image Analysis and Mathematical Morphology". Academic Press. Serra, J. (1988) - "Image Analysis and Mathematical Morphology - Vol.2 Theoretical Advances". Academic Press. Soeder D. J.(1990) - “Applications of Fluorescence Microscopy to Study of Pores in Tight Rocks”, The American Association of Petroleum Geologists Bulletin, 74(1):30-40.

Bibliographie - 187
de Souza, H. A. (1993) - "Estudo Dos Processos de Fixação E Transferência Isotérmica de Umidade Em Meios Porosos Heterogêneos". Thèse de Doctorat, Cpgemc - UFSC, Florianópolis. Shih, F.Y.; Pu, C.C. (1992) - "Morphological Shape Description Using Geometric Spectrum on Multidimensional Binary Images". Pattern Recognition, 25(9):921-927. Stauffer, (1985) - "Introduction to Percolation Theory". Taylor & Francis. Stagg, G.W. (1968) - "Computer Methods in Power System Analysis". Mcgraw Hill. Thiel, E. (1991) - "Amélioration des Distances du Chanfrein. Construction de la Ligne Médiane et Décomposition des Formes". Mémorie de Dea, Institut de Mécanique de Grenoble, Grenoble. Thiel, E. (1994) - "Les Distance de Chanfrein en Analyse D'images: Fondaments et Applications". Thèse de Doctorat, Institut de Mathématique Appliquée, Grenoble. Thovert, J.F.; Salles, J.; Adler, P.M. (1992) - "A Geometrical Model for Numerical Simulation of Capillary Imbibition in Sedimentary Rocks". Transport in Porous Media, Kluwer Academic Publishers, 12:125-141. Thovert, J.F.; Salles, J.; Adler, P.M. (1992) - "Computerized Characterisation of The Geometry of Real Porous Media: Their Discretization, Analysis and Interpretation". Journal of Microscopy, 170:65-79. Touchard, J.B. (1987) - "Images Numériques", Cedic/Nathan. Usson, Y.; Montanvert, A. (1993) - "Reconstruction Tridimensionnelle à partir des Distances Discretes". Colloque Geometrie Discrète en Imagerie, :88-97. Van Der Kooi, J. (1971) - " Moisture Transport in Cellular Concrets Roofs". Thèse de Doctorat, Eindhoven Univ. of Technology, Waltman, Delft. Van Genuchten, M.T. (1980) - " A Closed Form Equation for Predicting The Hydraulic Conductivity on Unsaturated Soils". Soil Science Society America Journal, 44:892-898. Vogel, H.J. (1997) - "Morphological Determination of Pore Connectivity As A Function of Pore Size Using Serial Sections". European Journal of Soil Sciences, 48:365-377. de Vries, D.A. (1958) - " Simultaneous Transfer of Heat and Moisture in Porous Media". Transactions of The American Geophysical Union, 39(5):909-916. Yao, J.; Frykman P.; Kalaydjian,T.F.; Thovert, J.F.; Adler, P.M. (1993) - "High-Order Moments of The Phase Function for Real and Reconstructed Model Porous Media: A Comparison”, Journal of Colloid and Interface Science, 156:478-490. Yokoi, S.; Toriwaki, J.; Fukumura, T. (1975) - "An Analysis of Topological Properties of Digitized Binary Pictures Using Local Features". Computer Graphics and Image Processing, 4:63-73. Yunes, P.R. (1992) - "Determinação Da Distribuição de Poros de Uma Argamassa de Cimento E Cal Usando As Isotermas de Equillíbrio E Dados de Microscopia Eletrônica". Thèse de Master of Sciences, Cpgemc - UFSC, Florianópolis. Spearing, M.; Matthews, G.P. (1991) - “Modelling Characteristic Properties of Sandstones”. Transport in Porous Media, Kluwer Academic Publishers, 6:71-90. Shih, F.Y.; Pu, C.C. (1992) - “Morphological Shape Description Using Geometric Spectrum on Multidimensional Binary Images”. Pattern Recognition, Pergamon Press, 25(9):921-927. Tacher, L.; Perrochet, P.; Parriaux, A. (1997) - "Generation of Granular Media". Transport in Porous
Bibliographie - 188
Media, Kluwer Academic Publishers, 26:99-107. Waku, K. (1993) - "Ondelettes et Applications en Imagerie et en Calcul de Surfaces". Thèse de Doctorat, Timc - Institut IMAG, Grenoble. Wood, R.E; Gonzalez, R.C. (1992) - "Digital Image Processing". Addison-Wesley. Wise, W.R. (1992) - "A New Insight on Pore Structure and Permeability". Water Resources Res., 28(1):189-198. Wheatcrapft, S.; Tyler, S.W. (1988) - "An Explanation of Scale-Dependent Dispersivity in Heterogeneous Aquifers Using Concepts of Fractal Geometry". Water Resources Research, 4: 556-578. Whitaker, S. (1969) - "Advances in The Theory of Fluid Motion in Porous Media". Ind. Eng. Chem., 12:14-28. Whitaker, S. (1969) - "Flow in Porous Media I: A Theoretical Derivation of Darcy's Law”. Transport in Porous Media, Kluwer Academic Publishers, 1(1):3-25. Zhirong, L. (1997) - "Computer Generation and Application of 3D Reconstructed Porous Media: From 2D Images to The Prediction of Permeability". Thèse de Doctorat - CPGEMC - UFSC, Florianopolis. Zhou, D.; Stenby, E.H. (1993) - “Displacement of Trapped Oil From Water-Wet Reservoir Rock”. Transport in Porous Media, Kluwer Academic Publishers, 11:1-16. Zhou, D.; Stenby, E.H. (1993) - “Interpretation of Capillary Pressure Curves Using Invasion Percolation Theory". Transport in Porous Media, Kluwer Academic Publishers, 11:17-31.
ANNEXE B
THE GENERALIZED MEDIAN LINE GRAPHICS TECHNIQUE
IN POROUS MEDIA GEOMETRY CHARACTERISATION
Article publiée dans le QCVA 95 – International Conference on Quality Control by Artificial Vision
France - Mai - 1995
ANNEXE C
DISCRETE MULTIPHASE EQUILIBRIUM SIMULATION
IN POROUS MEDIA
Article publiée dans le ENCIT 96 - Brazilian Congress of Engineering and Thermal Sciences LATCYM 96 – Latin American Congress of Heat and Mass Transfer
Brésil - Novembre - 1996

ANNEXE D
CALCUL NUMERIQUE DE COURBURES TRIDIMENSIONNELLES:
APPLICATION A LA NEIGE HUMIDE
Article publiée dans le Colloque SHF - Societe Hydrodinamique Francaise - Section Glaciologie
CEMAGREF/Grenoble - Mai 1998

ANNEXE E
DEVELOPPEMENTS


E.1 Introduction La géométrie discrète est née avec la volonté d'appliquer l'outil informatique pour aider à résoudre les
problèmes de reconnaissance de formes et la modélisation de l'espace. Ce développement est
directement lié à la progression du niveau technologique de l'industrie informatique. La généralisation
de l'ordinateur personnel dans les divers domaines de la recherche scientifique a permi l'adoption des
ces concepts mathématiques avec la dispersion dans des disciplines diverses, aussi spécifiques que
l'étude du milieu poreux. La première étape importante pour la généralisation de ces concepts avec
l'application de la mathématique algorithmique pour aider la compréhension et modélisation de l'espace
est le développement des algorithmes et interfaces adaptés à la philosophie de chaque domaine. Cela
passe par la compréhension des concepts de la mathématique algorithmique et par l'apprentissage des
langages informatiques pour l'implémentation et l'exécution optimale d'analyse.
L'objectif de cet annexe est l'introduction des outils informatiques développés pour la réalisation de ce
travail de thèse et dans les travaux en partenariat, avec les concepts et les technologies utilisées. Les
outils développés se situent dans le domaine de l'interface graphique pour le contrôle et la visualisation
des traitements et des résultats (en 2D et 3D), dans l'interprétation informatique des données par
analyse d'images et dans la simulation et l’analyse d'équipements de mesures des propriétés physiques
sur le terrain.
La structure de l'annexe introduit d'abord l'environnement VRlab, développé pour rassembler dans une
interface les divers outils de traitement géométrique et de visualisation en 3D et 2D. Les logiciels de
simulation sont introduits ensuite, avec la présentation de quelques interfaces. Les développements en
partenariat pour l'application de l'imagerie et la géométrie discrète sont présentés : la reconstruction des
profils verticaux pour les expériences d'invasion de colorants dans les sols, le logiciel de mesure de la
longueur de racines, la mesure du front d'invasion de fluides et d'autres algorithmes généraux. Dans la
fin d'annexe les conclusions et perspectives technologiques seront analysées.
E.2 L’environnement VRLab Les développements des algorithmes en 3D et 2D pour l'analyse et la modélisation des géométries
réelles a conduit à l'implémentation d'un environnement appelé VRlab (acronymie pour Virtual Reality
Laboratoire). L'objectif principal de cet environnement est de promouvoir une interface de contrôle
unique pour les différents logiciels disponibles et leurs développements. Dans la figure E.1 est présenté
un écran de l'environnement VRlab (barre de contrôle à droite) et quelques applications (visualisation et
calcul).
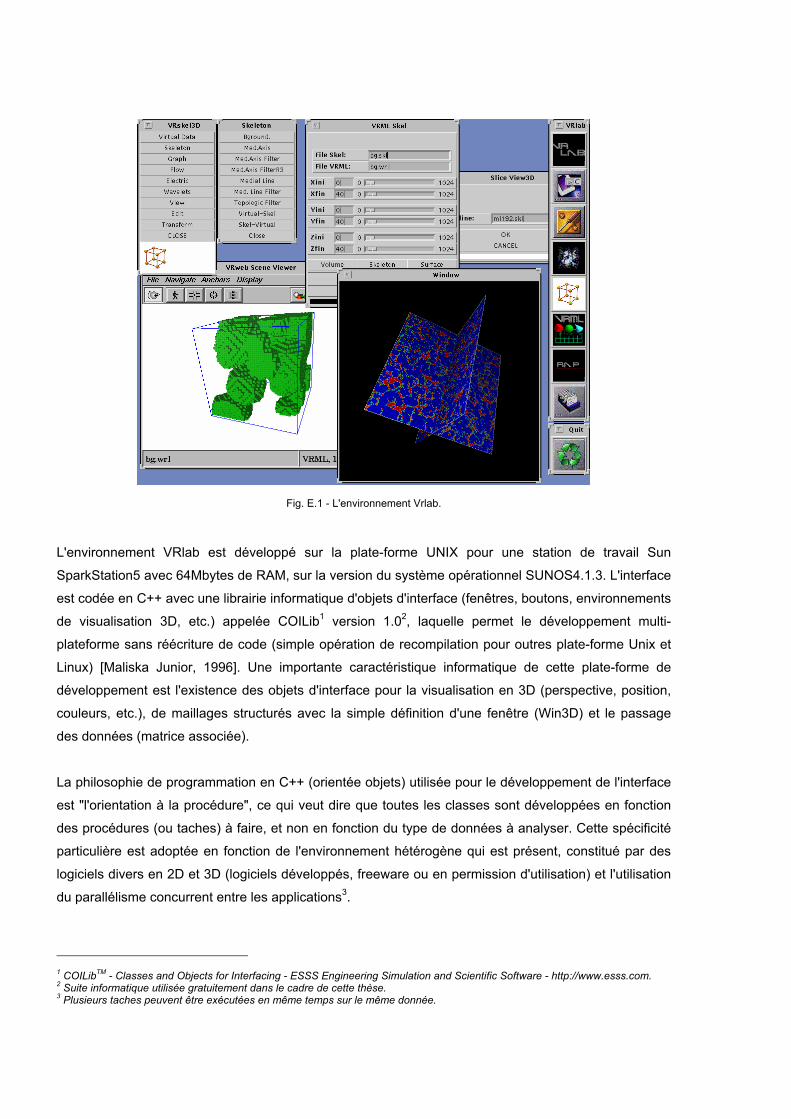
Fig. E.1 - L'environnement Vrlab.
L'environnement VRlab est développé sur la plate-forme UNIX pour une station de travail Sun
SparkStation5 avec 64Mbytes de RAM, sur la version du système opérationnel SUNOS4.1.3. L'interface
est codée en C++ avec une librairie informatique d'objets d'interface (fenêtres, boutons, environnements
de visualisation 3D, etc.) appelée COILib1 version 1.02, laquelle permet le développement multi-
plateforme sans réécriture de code (simple opération de recompilation pour outres plate-forme Unix et
Linux) [Maliska Junior, 1996]. Une importante caractéristique informatique de cette plate-forme de
développement est l'existence des objets d'interface pour la visualisation en 3D (perspective, position,
couleurs, etc.), de maillages structurés avec la simple définition d'une fenêtre (Win3D) et le passage
des données (matrice associée).
La philosophie de programmation en C++ (orientée objets) utilisée pour le développement de l'interface
est "l'orientation à la procédure", ce qui veut dire que toutes les classes sont développées en fonction
des procédures (ou taches) à faire, et non en fonction du type de données à analyser. Cette spécificité
particulière est adoptée en fonction de l'environnement hétérogène qui est présent, constitué par des
logiciels divers en 2D et 3D (logiciels développés, freeware ou en permission d'utilisation) et l'utilisation
du parallélisme concurrent entre les applications3.
1 COILibTM - Classes and Objects for Interfacing - ESSS Engineering Simulation and Scientific Software - http://www.esss.com. 2 Suite informatique utilisée gratuitement dans le cadre de cette thèse. 3 Plusieurs taches peuvent être exécutées en même temps sur le même donnée.

L'interface de contrôle fait la gestion des opérateurs et divers logiciels, par une interface POSIX
compatible, permettent le passage de paramètres et le contrôle par une console Unix standard. Les
prototypes de logiciels disponibles sont :
Traitement Géométrique 3D :
-VRskel3D : traitement et analyse géométrique des données en 3D développé avec la géométrie
discrète §2. Les principales routines sont : calcul des squelettes, opération de filtrages sur les
squelettes, la mesure du VER, les mesures de granulométries par morphologie mathématique,
opérations booléennes sur les volumes (découpage, rotation, etc.), mesures de porosité, profils
géométriques, génération des fichiers VRML pour la visualisation de volumes et graphes, etc. ;
Visualisation 3D :
-SliceView3D : visualisation en 3D des sections du volume ;
-VRview : adaptation d'un freeware de visualisation en VRML 1.0 des fichiers en 3D ;
Simulation 3D :
-Vrinflow3D : simulation d'invasion de fluides mouillants et non mouillants;
-Vroutflow3D : simulation de drainage de fluides mouillants et non mouillants;
Traitement Géométrique en 2D :
-Porous Image Analysis : logiciel pour la segmentation d'images de milieux poreux en 2D;
-Binary : logiciel pour le seuillage de micrographies de milieux poreux en niveau de gris;
-Pore : logiciel de traitement et d'analyse d'images développé au LTHE, porté de l'environnement
HPview (plataforme Unix HP) à SUNOS.
-Routines IPS1 - "Image Package System" : Prototypage et développement de routines pour l'analyse
d'images 2D (morphologiques, images en niveau de gris, etc.) dans une interface de contrôle
graphique;
-Xview : logiciel freeware pour la conversion d'archives graphiques (tiff, raster, ANSI, etc);
Simulation 2D :
-Vrinflow2D : simulation d'invasion de fluides mouillants et non mouillants dans les 2D;
-Vroutflow2D : simulation de drainage de fluides mouillants et non mouillants dans les 2D;
Les logiciels de visualisation en 3D ont été développés et adaptés en fonction de la non-existence d'un
modèle de visualisation avec l'abstraction volumétrique requise pour les systèmes et les technologies
de ce travail [Borianne, 1994; Debled-Rennesson, 1994]. La solution étudiée a été l'adaptation du la
1 IPS v3.1 est un progiciel pour l'imagerie en 2D dévéloppé au sein de l'équipe TIMC du IMAG/UJF/Grenoble, disponible sur la plateforme SUNSOS4.1.3, utilisé avec permission.

meta-langage VRML (Virtual Reality Markup Language) développé sur Internet pour la visualisation de
"mondes virtuels" (imagerie en 3D). Le codage en VRML est déjà un standard pour la visualisation en
3D et profite de l'existence d'un nombre considérable d'interfaces freeware sur les réseaux et privilégie
la portabilité et la diffusion des résultats. La principale caractéristique technologique est le codage de
volumes non-structurés par des primitives géométriques simples (le cube, la sphère, etc.). Le
désavantage est la grande capacité informatique (carte graphique, mémoire vidéo) nécessaire à la
représentation d'un volume important1. Une deuxième solution développée a été la visualisation des
sections du volume par la bibliothèque d'objets COILib, avec la construction de facettes de visualisation
dans un volume structuré. Le principal avantage a été la possibilité de contrôle des résultats avec la
visualisation partielle d'un volume complet.
Fig. E.2 - L'interface du logicielle de simulation 2D d'invasion et
drainage d'un fluide non-mouillante - INview2D.
Les logiciels de simulation de propriétés physiques ont des particularités uniques selon chaque
dimension, avec des contraintes technologiques importantes. Les simulateurs en 2D permettent la
visualisation directe des résultats sur chaque interaction du calcul avec la sortie sur l'écran des images
caractéristiques, avec les graphiques d'accompagnement. Dans la figure E.2 est présentée un écran du
logiciel VRview2D où on observe les fenêtres de contrôle et le résultat. L'interface offre les possibilités
ordinaires d'une interface moderne et permet la sauvegarde des images simulées pour l'édition
d'animations dans le format MPEG1.0 (format standard pour les animations numériques de petit taille).
1 La volume maximal visualisé sur la plataforme informatique disponible a été de 4000 primitives géométriques (un squelette d'un

Le principal problème dans la simulation en 3D est l'interdiction de l'accompagnement visuel des états
d'équilibre pour la simulation des processus d'invasion et de drainage en fonction de la grand taille
informatique des échantillons pour la visualisation. La solution adoptée a été le contrôle graphique du
profil d'invasion et de drainage par la mesure du taux volumique de remplissage de l'espace poreux par
profondeur, avec la sauvegarde des états intermédiaires pour la visualisation à posteriori. Dans la figure
E.3 est présenté l'interface du simulateur d'invasion en 3D d'un fluide non-mouillant (à partir de toutes
les surfaces) avec les sorties graphiques d'accompagnement.
Fig. E.3 - L'environnement VRlab et la simulation d'un processus
d'invasion d'un fluide non-mouillant en 3D par toutes les frontières.
E.3 Reconstruction du Profil d’invasion 3D L'étude du phénomène des écoulements préférentiels dans les sols [Posadas, 1996; Onody, 1995] est
basée sur des observations expérimentales de terrain [Moran, 1989; Moran, 1992] et de laboratoire par
l'utilisation des marqueurs [Soeder, 1990] (colorants, solutions, etc.) pour l'analyse du chemin parcouru
par le flux hydrique. En général les mesures et les estimations sont réalisées de façon indirectes par
des méthodes gravimétriques ou par l'analyse de la concentration par échantillonnage. La principale
contrainte est la non-observation directe du profil vertical du passage du marqueur dans le volume.
Une méthode de génération des profile verticaux et d'acquisition d'images pour l'estimation du profil
volume de 100x100x100 voxel aproximativement)

vertical du passage d'un marqueur dans les sols a été développée lors d'un séjour à l'université de
Cornell (NY,USA), proposé par le professeur T. Steenhuis (Soil and Water Lab. - ABEN). L'objectif
principal du travail a été la détermination des profils verticaux du marqueur dans le sol pour l'estimation
des principales dimensions fractales [Sarkar, 1992; Weatcrapft, 1988] de la géométrie du profil dans le
cadre d'un travail de recherche du groupe.
La méthode est basée sur l'acquisition et le traitement d'images des sections horizontales de l'invasion
d'un colorant dans le sol (DYE Infiltration Experiment) pour quatre expériences différentes sur le terrain.
Dans la figure E.4 est présenté l'empilement de 16 images des sections horizontales pour un essai,
avec l'observation dans le pseudo volume du chemin préférentiel du flux hydrique.
Fig. E.4 - Le pseudo volume généré par l'empilement des images séquentielles.
Un protocole d'acquisition d'images a été élaboré pour la circonstance à partir du détourage des
sections séquentielles, présenté dans la figure E.5.a1 (marqueur en couleur vert foncé). Les images des
sections horizontales sont soumises à une déconvolution du signal couleur pour la segmentation de la
palette dans le passage de l'espace colorimétrique RGB au HUV (Wood, 1992], présentées dans la
figure E.5.b. Cette segmentation permet la détermination de la forme de la surface marquée par le
colorant et la suppression de tous les bruits divers. La surface colorée est interprétée comme une
cartographie des concentrations par le passage de la palette à la représentation avec des fausses
couleurs en niveaux de gris (figure E.5.c).
1 L'image représente une section de 64x64 cm

(a) (b) (c)
Fig. E.5 - L'image du marqueur dans le sol (a), la déconvolution de la palette de couleurs (b) et la cartographie de concentrations (c).
La principale contrainte de la méthode est la taille informatique des images pour chaque sections (20
Mbytes - résolution 1mm) qui interdit la manipulation du volume dans les ordinateurs personnels. La
solution proposée pour l'interpolation des profils verticaux est l'interpolation interactive des sections
intermédiaires entre deux images consécutives jusqu'à la résolution requise. D'abord la section
moyenne est interpolée linéairement avec les cartographies des images, suivi de l'interpolation de la
moyenne entre la section calculée avant et la section elle même. Le processus se termine lorsque la
quantité des sections interpolées entre les images consécutives satisfait la résolution requise
(homogénéisation de la résolution pour les trois axes de symétrie). L'interpolation des sections est faite
avec l'observation d'un voisinage restreint (+/- 20 pixel de largeur) au profil pour limiter la taille de
mémoire requise (schéma de la figure E.6).
Top Photo 1
Top Photo 2
Interpolated slice
Profile
Fig. E.6 - Schéma pour l'interpolation entre les images séquentielles.
Le résultat pour l'extrapolation de la géométrie du profil du marqueur dans le sol est présenté dans la
figure E.7 pour deux profils selon la direction X et Y, avec la projection dans le volume avec l'image
supérieure et inférieure respectivement. Les profils présentés représentent une expérience dans un sol
avec une profondeur caractéristique de 33 cm. Les profils dans la direction XZ et YZ sont présentés
dans l'image de la figure E.8.

Fig. E.7 - Les profils verticaux interpolés (direction X et Y) et
la projection dans le volume.
Fig. E.8 - Les sections de profils simulées dans les directions XZ et YZ.
L’algorithme a été implémenté en ANSI C (POSIX compatible), avec l’encapsulement des routines pour
la portabilité du code. Les résultats présentés pour la reconstruction volumique sont exécutés sur
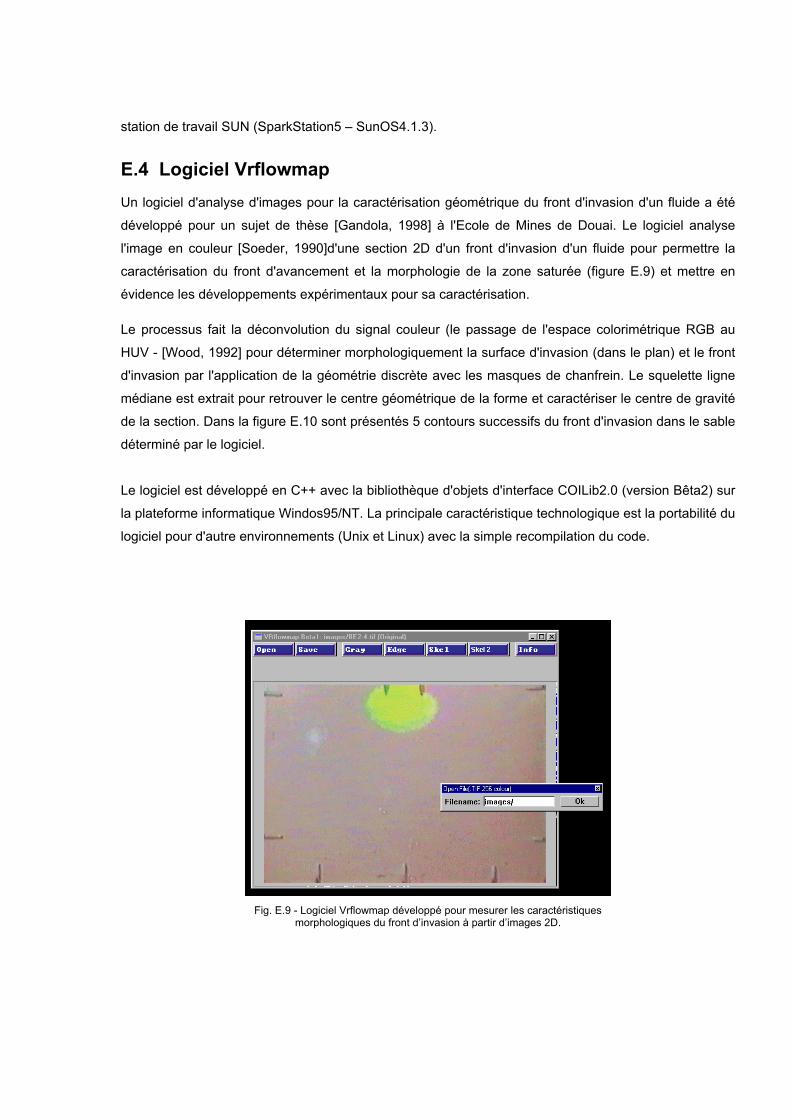
station de travail SUN (SparkStation5 – SunOS4.1.3).
E.4 Logiciel Vrflowmap Un logiciel d'analyse d'images pour la caractérisation géométrique du front d'invasion d'un fluide a été
développé pour un sujet de thèse [Gandola, 1998] à l'Ecole de Mines de Douai. Le logiciel analyse
l'image en couleur [Soeder, 1990]d'une section 2D d'un front d'invasion d'un fluide pour permettre la
caractérisation du front d'avancement et la morphologie de la zone saturée (figure E.9) et mettre en
évidence les développements expérimentaux pour sa caractérisation.
Le processus fait la déconvolution du signal couleur (le passage de l'espace colorimétrique RGB au
HUV - [Wood, 1992] pour déterminer morphologiquement la surface d'invasion (dans le plan) et le front
d'invasion par l'application de la géométrie discrète avec les masques de chanfrein. Le squelette ligne
médiane est extrait pour retrouver le centre géométrique de la forme et caractériser le centre de gravité
de la section. Dans la figure E.10 sont présentés 5 contours successifs du front d'invasion dans le sable
déterminé par le logiciel.
Le logiciel est développé en C++ avec la bibliothèque d'objets d'interface COILib2.0 (version Bêta2) sur
la plateforme informatique Windos95/NT. La principale caractéristique technologique est la portabilité du
logiciel pour d'autre environnements (Unix et Linux) avec la simple recompilation du code.
Fig. E.9 - Logiciel Vrflowmap développé pour mesurer les caractéristiques
morphologiques du front d’invasion à partir d’images 2D.

Fig. E.10 -Visualisation du front d’invasion à différents instants.
E.5 Logiciel VRroot Un logiciel pour le traitement informatique d'images des racines pour la détermination de la longueur et
du diamètre moyen [Kaspar, 1997] a été développé pour le LTHE dans le cadre d'une thèse. Dans la
figure E.11 est présenté un écran du logiciel VRroot avec l'image en niveaux de gris de quelques
racines.
L'analyse est faite à partir d'images en niveaux de gris des racines avec la seuillage pour la
détermination de la morphologie. Un filtre de connexité et taille est appliqué pour la suppression des
petits bruits résultants de l'étape antérieure, en général plus petit que 1% de la superficie de l'image. Le
squelette ligne médiane est construit pour la détermination de la longueur et le diamètre moyen à partir
de la distance de chanfrein associée.
Fig. E.11 - Logiciel VRroot pour mesurer la longueur et le diamètre
moyen de racines à partir d’images 2D.
Le logiciel est développé en C++ avec la bibliothèque d'objets d'interface COILib2.0 (version Bêta2) sur

la plataforme informatique Windos95/NT.
E.6 Routines IPS L'équipe INFODIS du laboratoire TIMC-IMAG de Grenoble développe depuis 1985 le logiciel Image
Package Software - IPS. Il est composé autour d'une bibliothèque d'opérateurs et d'une interface
multifenêtres chargée de l'activation des opérateurs. Le but du projet IPS est triple, avec l'illustration des
méthodes, leurs tests (protocoles, faisabilité) et l'autoformation.
IPS est maintenant distribué en deux versions :
- La version globale (G.IPS). Il s'agit de transformations géométriques, algébriques ou locales,
morphologie mathématique, segmentation, représentation par régions ou par contours, Fourier,
pyramides, etc.
- La version personnelle (P.IPS). Elle comprend l'interface proprement dite, et un Builder qui facilite
l'intégration de nouveaux opérateurs. Chaque utilisateur peut donc définir sa version autonome, tout en
ayant la possibilité de communiquer avec d'autres P.IPS et avec G.IPS.
L'interface de IPS a été conçue comme un ensemble d'objets - image, opérateur, macro, graphe, etc. -
qui ont chacun leur menu contextuel et leur icône appropriés. Les icônes peuvent être sélectionnées,
déplacées, superposées, dupliquées, etc. Le menu contextuel d'une icône image permet d'ouvrir des
fenêtres d'édition et de changer les propriétés (taille, palette de couleurs, nom). On peut également
éditer l'image en double-cliquant sur l'icône.
L'éditeur inclus dans IPS permet les manipulations classiques et quelques dessins, le zoom et le mode
loupe. Dans ce dernier sont superposables les valeurs d'une image avec les couleurs d'une autre, ce
qui est utile par exemple pour localiser l'axe médian sur une image de distances.
Chaque opérateur possède une boite de contrôle, elle précise le nombre d'images en entrée et en
sortie, et demande les paramètres à appliquer. Pour exécuter un opérateur, il faut sélectionner dans
l'ordre les images en entrée (obligatoire) et en sortie (facultatif). Les images non sélectionnées en sortie
sont créées (puis ajoutées dans la sélection), sinon elles sont réutilisées, au besoin en changeant leur
taille.
La grande qualité d'IPS est de faciliter l'intégration de nouveaux opérateurs, tout utilisateur désirant
développer sa version personnelle PIPS, lance un programme d'installation, qui crée les répertoires,
importe les librairies et le Builder. L'environnement IPS est disponible aujourd'hui sur les plates-formes
SUNOS4.1.3 et Linux version 2.x avec l'exploration du langage C avec le compilateur de domaine
publique GCC de la fondation GNU.

Dans ce travail de recherche l'environnement IPS a été utilisé pour le développement et le prototypage
des routines d'analyse d'images en 2D, morphologiques, traitement du signal et de la géométrie
discrète. Une application développée a été la simulation des sondes à Neutrons et TDR pour
l'estimation de la qualité des données des mesures expérimentales sur le terrain à partir des mesures
gravimétriques de teneur en eau (décrit dans l'annexe E). Dans la figure E.12 est présentée la
cartographie des mesures gravimétriques pour le teneur en eau à partir des fausses couleurs (en
niveau de gris) et dans la figure E.13 et E.14 les résultats pour les simulations, respectivement TDR et
neutrons.
Fig. E.12 - La cartographie en niveaux de gris pour la teneur en eau gravimetrique.
Fig. E.13 - Le résultats pour la simulation de la mesure du teneur en eau de
la sonde TDR à partir des attenuations gaussiennes et linéares.
Les routines développées dans le cadre de ce travail sont: seuillages statistiques (multi-classes),

squelettes (AM, LM) et graphes (GLMG) en 2D, les générateurs de structures discrets en 2D,
prototypage des outils de simulation de fluides et les convertisseurs pour les fichiers des différentes
applications.
Fig. E.14 - Le résultats pour la simulation de la mesure du teneur en eau de
la sonde Neutronique à partir des attenuations gaussiennes et linéares.
E.7 Synthèse Le chapitre a introduit les développements informatiques réalisés dans le cadre de ce travail et dans le
partenariat avec d'autres chercheurs. Les applications sont présentées avec les illustrations de
quelques résultats et les solutions informatiques adoptées (plate-forme, vitesse d'exécution, etc.) ce que
ne représentait pas l'objectif premier de ce travail.
D'abord l'environnement Vrlab est introduit avec l'objectif de rassembler dans une seule interface de
contrôle tous les outils disponibles. Les applications en 3D pour l'analyse géométrique sont introduites
avec la spécificité informatique et les technologies explorées.
L'application des concepts de la géométrie discrète et les descripteurs de forme (squelettes) sont
abordés avec l'illustration des interfaces développées et la spécificité informatique dans le cadre de la
coopération entre divers chercheurs. L'environnement IPS (IMAG/Grenoble) est présenté avec ses
propriétés technologiques et quelques applications développées sur son interface, à travers des
résultats pour la simulation d'équipements de mesures de propriétés physiques.
Les développements présentés dans l'application de cette technologie mathématique pour les différents
domaines présentés met en évidence le besoin de son développement futur avec le rapprochement et
la symbiose des domaines de recherche de l'informatique, mathématique algorithmique et de la
physique appliquée.


















