Modeling&Simulation2019 Lecture8. Bondgraphs · resistive resistor friction friction friction...
49
Modeling & Simulation 2019 Lecture 8. Bond graphs Claudio Altafini Automatic Control, ISY Linköping University, Sweden
Transcript of Modeling&Simulation2019 Lecture8. Bondgraphs · resistive resistor friction friction friction...

Modeling & Simulation 2019Lecture 8. Bond graphs
Claudio AltafiniAutomatic Control, ISYLinköping University, Sweden

1 / 45
Summary of lecture 7
• General modeling principles• Physical modeling: dimension, dimensionless quantities, scaling• Models from physical laws across different domains• Analogies among physical domains
2 / 45
Lecture 8. Bond graphs
Summary of today
• Analogies among physical domains• Bond graphs• Causality
In the book: Chapter 5 & 6

3 / 45
Basic physics laws: a survey
Electrical circuits
Mechanics – translational
Mechanics – rotational
Hydraulics
Thermal systems

4 / 45
Electrical circuits
Basic quantities:
• Current i(t) (ampere)• Voltage u(t) (volt)
• Power P (t) = u(t) · i(t)

5 / 45
Electrical circuits
Basic laws relating i(t) and u(t)
• inductance
Ld
dti(t) = u(t) ⇐⇒ i(t) =
1
L
∫ t
0
u(s)ds
• capacitance
Cd
dtu(t) = i(t) ⇐⇒ u(t) =
1
C
∫ t
0
i(s)ds
• resistance (linear case)u(t) = Ri(t)
6 / 45
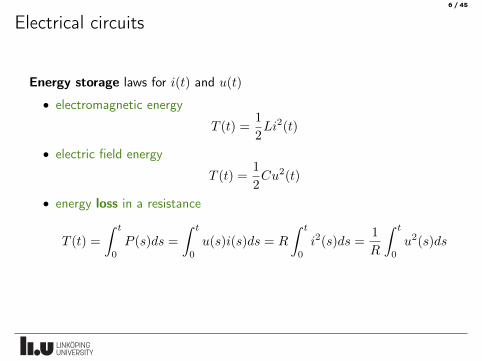
Electrical circuits
Energy storage laws for i(t) and u(t)
• electromagnetic energy
T (t) =1
2Li2(t)
• electric field energy
T (t) =1
2Cu2(t)
• energy loss in a resistance
T (t) =
∫ t
0
P (s)ds =
∫ t
0
u(s)i(s)ds = R
∫ t
0
i2(s)ds =1
R
∫ t
0
u2(s)ds

7 / 45
Electrical circuits
Interconnection laws for i(t) and u(t)
• Kirchhoff law for voltagesOn a loop:
∑k
σkuk(t) = 0, σk =
{+1, σk aligned with loop direction−1, σk against loop direction
• Kirchhoff law for currentsOn a node:
∑k
σkik(t) = 0, σk =
{+1, σk inward−1, σk outward
8 / 45
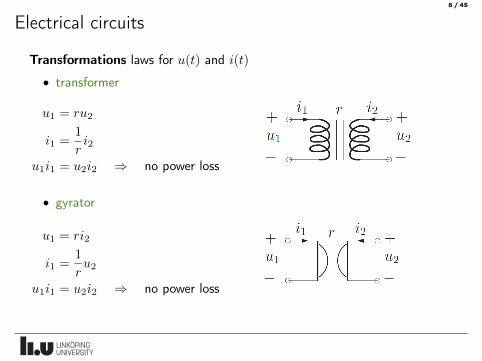
Electrical circuits
Transformations laws for u(t) and i(t)
• transformer
u1 = ru2
i1 =1
ri2
u1i1 = u2i2 ⇒ no power loss
• gyrator
u1 = ri2
i1 =1
ru2
u1i1 = u2i2 ⇒ no power loss

9 / 45
Electrical circuits
Example
State space model:
d
dti =
1
L(us −Ri− uC)
d
dtuC =
1
Ci

10 / 45
Mechanical – translational
Basic quantities:
• Velocity v(t) (meters per second)• Force F (t) (newton)
• Power P (t) = F (t) · v(t)

11 / 45
Mechanical – translational
Basic laws relating F (t) and v(t)
• Newton second law
md
dtv(t) = F (t) ⇐⇒ v(t) =
1
m
∫ t
0
F (s)ds
• Hook’s law (elastic bodies, e.g. spring)
1
k
d
dtF (t) = v(t) ⇐⇒ F (t) = k
∫ t
0
v(s)ds
• viscosity (e.g. dry friction)
F (t) = bv(t)
12 / 45
Mechanical – translational
Energy storage laws for F (t) and v(t)
• kinetic energy
T (t) =1
2mv2(t)
• potential energy
T (t) =1
2kF 2(t)
• energy loss due to friction
T (t) =
∫ t
0
P (s)ds =
∫ t
0
F (s)v(s)ds = b
∫ t
0
v2(s)ds =1
b
∫ t
0
F 2(s)ds
13 / 45
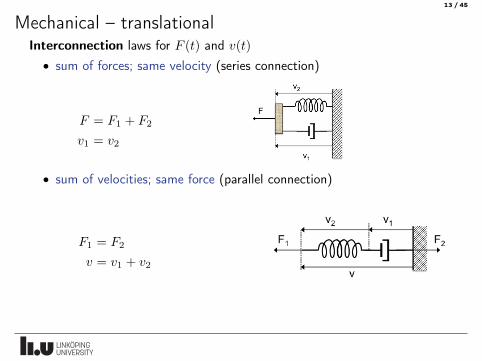
Mechanical – translationalInterconnection laws for F (t) and v(t)• sum of forces; same velocity (series connection)
F = F1 + F2
v1 = v2
• sum of velocities; same force (parallel connection)
F1 = F2
v = v1 + v2

14 / 45
Mechanical – translational
Transformations laws for F (t) and v(t)
• levers
F1 = −`2`1F2
v1 = −`1`2v2
• pulleys
F1 =1
2F2
v1 = −1
2v2

15 / 45
Mechanical – rotational
Basic quantities:
• Angular Velocity ω(t) (radians per second)• Torque M(t) (newton · meter)
• Power P (t) =M(t) · ω(t)

16 / 45
Mechanical – rotational
Basic laws relating M(t) and ω(t)
• Newton second law
Jd
dtω(t) =M(t) ⇐⇒ ω(t) =
1
J
∫ t
0
M(s)ds
• torsion of a body
1
k
d
dtM(t) = ω(t) ⇐⇒ M(t) = k
∫ t
0
ω(s)ds
• rotational friction (typically nonlinear)
M(t) = h(ω(t))

17 / 45
Mechanical – rotational
Energy storage laws for M(t) and ω(t)
• rotational energy
T (t) =1
2Jω2(t)
• torsional energy
T (t) =1
2kM2(t)
• energy loss due to rotational friction
T (t) =
∫ t
0
P (s)ds =
∫ t
0
M(s)ω(s)ds

18 / 45
Mechanical – rotationalInterconnection laws for M(t) and ω(t)
• sum of torques; same angular velocity (series connection)
M =M1 +M2
ω1 = ω2
• sum of velocities; same force (parallel connection)
M1 =M2
ω = ω1 + ω2

19 / 45
Mechanical – rotational
Transformations laws for M(t) and ω(t)
• gears
M1 = rM2
ω1 = −1
rω2
• “gyrator”
My = rωz
ωy = −1
rMz
20 / 45
Flow system
Basic quantities:
• Flow Q(t) (cubic meters per second)• Pressure p(t) (newton per square meter)
• Power P (t) = p(t) ·Q(t)

21 / 45
Flow systemBasic laws relating p(t) and Q(t)
• Newton second law
ρ`
A︸︷︷︸Lf=inertance
d
dtQ(t) = p(t) ⇐⇒ Q(t) =
1
Lf
∫ t
0
p(s)ds
• pressure of a liquid column
A
ρg︸︷︷︸Cf=capacitance
d
dtp(t) = Q(t) ⇐⇒ p(t) =
1
Cf
∫ t
0
Q(s)ds
• flow resistance (laminar flow)
p(t) = Rf︸︷︷︸flow resistance
Q(t)

22 / 45
Flow system
Energy storage laws for p(t) and Q(t)
• kinetic energy (fluid in a tube)
T (t) =1
2LfQ
2(t)
• potential energy (fluid in a tank)
T (t) =1
2Cfp
2(t)
• energy loss due to flow resistance
T (t) =
∫ t
0
P (s)ds =
∫ t
0
p(s)Q(s)ds

23 / 45
Flow systemInterconnection laws for p(t) and Q(t)
• series connection
p = p1 + p2
Q1 = Q2
• parallel connection
p1 = p2
Q = Q1 +Q2

24 / 45
Flow system
Transformations laws for p(t) and Q(t)
• flow transformer
p1 = rp2
Q1 =1
rQ2
where r = A2/A1

25 / 45
Analogies among physical domains
Electrical Mechanical Mechanical Hydraulic Thermaltranslational rotational
flow current velocity angular volume heat flowvelocity flow
effort voltage force torque pressure temperaturepower power power power power power ·
temperatureinductive inductor inertia moment of inertia of −−element inertia fluid
capacitive capacitor spring torsional tank heatelement spring storageresistive resistor friction friction friction thermalelement resistance
transformer transformer lever gears transducer −−gyrator gyrator −− gyro −− −−

26 / 45
Conversions among domains
• Mechanical (translational) – Hydraulics
transformer:
p =1
AF
Q = A v
• Mechanical (rotational) – Electrical
gyrator:
M = k i
ω =1
ku

27 / 45
Analogies among physical domains
• two "power" variables1. flow
f ={i, v, ω, Q, q
}2. effort
e ={u, F, M, p, T
}• their product: power
e · f ={u · i, F · v, M · ω, p ·Q, T · q
}
28 / 45
Analogies, cont’d
• three energy "exchange" relationships1. inductance =⇒ effort storage
df
dt=
1
αe =⇒ f(t) =
1
α
∫ t
0
e(s)ds
2. capacitance =⇒ flow storage
de
dt=
1
βf =⇒ e(t) =
1
β
∫ t
0
f(s)ds
3. resistance =⇒ loss of energy
e = γf (possibly nonlinear: e = h(f))
29 / 45
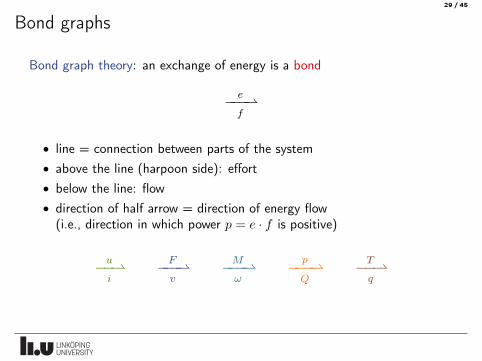
Bond graphs
Bond graph theory: an exchange of energy is a bond
e−−−⇀f
• line = connection between parts of the system• above the line (harpoon side): effort• below the line: flow• direction of half arrow = direction of energy flow(i.e., direction in which power p = e · f is positive)
u−−⇀i
F−−−⇀v
M−−−⇀ω
p−−−⇀Q
T−−⇀q
30 / 45
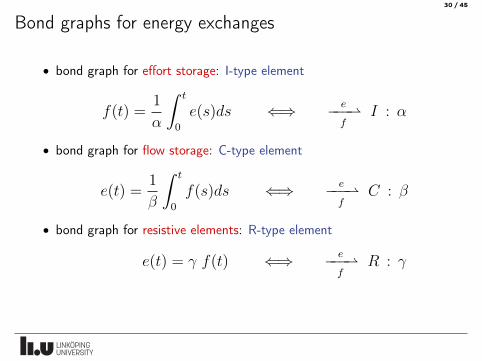
Bond graphs for energy exchanges
• bond graph for effort storage: I-type element
f(t) =1
α
∫ t
0
e(s)ds ⇐⇒ e−−−⇀f
I : α
• bond graph for flow storage: C-type element
e(t) =1
β
∫ t
0
f(s)ds ⇐⇒ e−−−⇀f
C : β
• bond graph for resistive elements: R-type element
e(t) = γ f(t) ⇐⇒ e−−−⇀f
R : γ

31 / 45
Bond graphs for sources
• bond graph for effort source
See−−−−⇀f
[system ]
• bond graph for flow source
Sfe−−−−⇀f
[system ]

32 / 45
Bond graphs for junctions
bond graph for series connection: s - junction
..........................e1
f1s..........................
e2 f2
..........................
en fn
f1 = f2 = . . . = fn =⇒ common flow
e1 + e2 + . . .+ en = 0
outgoing harpoon at ej : change sign to ej in the summation

33 / 45
Bond graphs for junctions
bond graph for parallel connection: p - junction
............................e1
f1p............................
e2 f2
............................
en fn
e1 = e2 = . . . = en =⇒ common effort
f1 + f2 + . . .+ fn = 0
outgoing harpoon at fj : change sign to fj in the summation
34 / 45
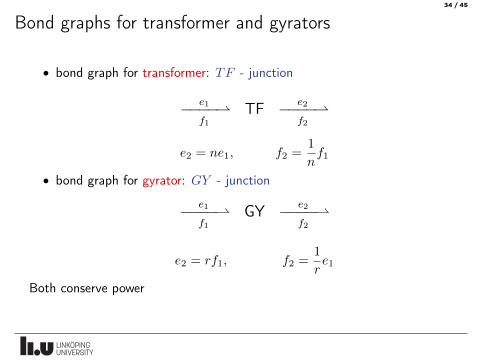
Bond graphs for transformer and gyrators
• bond graph for transformer: TF - junction
e1−−−−⇀f1
TF e2−−−−⇀f2
e2 = ne1, f2 =1
nf1
• bond graph for gyrator: GY - junction
e1−−−−⇀f1
GY e2−−−−⇀f2
e2 = rf1, f2 =1
re1
Both conserve power

35 / 45
Bond graphs and ports
Edges (bonds) of the bond graph are connecting points (or ports) of thesystem. The number of ports can be• one port: Se, Sf , C, I, R• two ports: TF , GY• multiport: s-junction, p-junction

36 / 45
Example: electrical circuit / hydraulic system

37 / 45
Example: electrical circuit

37 / 45
Example: electrical circuit
38 / 45
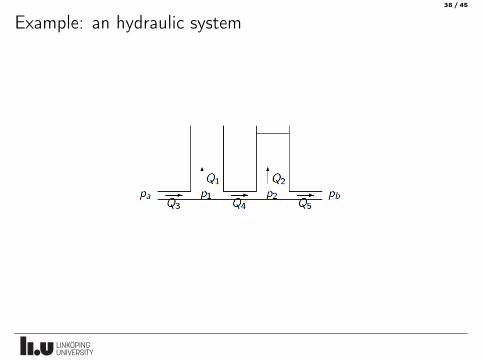
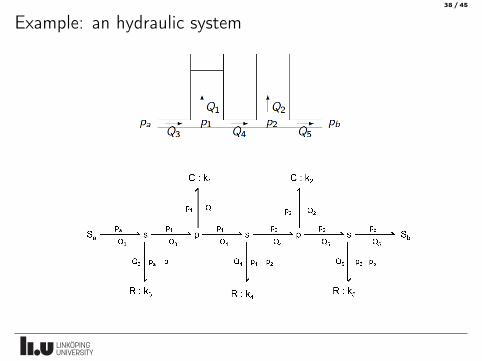
Example: an hydraulic system
38 / 45
Example: an hydraulic system

39 / 45
State space description
Is it possible to obtain a state space description out of a bond graph?
Information flow in a state space model
x = f(x, u)
• for given x och u it is possible to compute x?
• in a bond graph: causality marking

40 / 45
Information flow
Information flow for bond graphs of C , I, and Se, Sf types:
︸ ︷︷ ︸integral causality
41 / 45
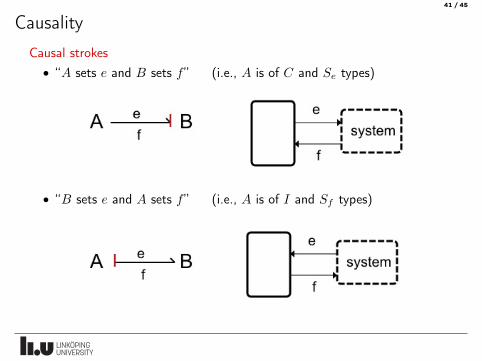
CausalityCausal strokes• “A sets e and B sets f ” (i.e., A is of C and Se types)
• “B sets e and A sets f ” (i.e., A is of I and Sf types)
42 / 45
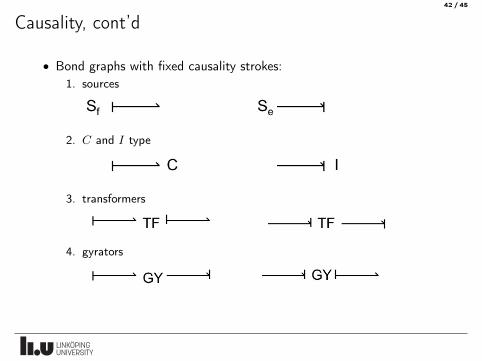
Causality, cont’d
• Bond graphs with fixed causality strokes:1. sources
2. C and I type
3. transformers
4. gyrators

43 / 45
Causality, cont’d• Causality at junctions
1. s-junctions
2. p-junctions
44 / 45
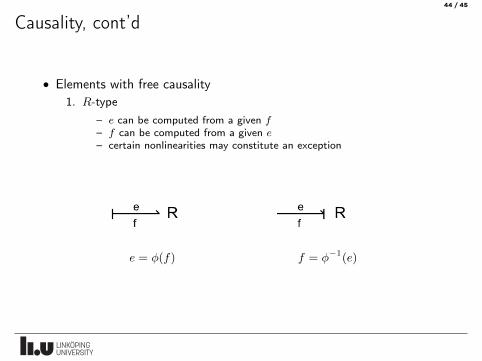
Causality, cont’d
• Elements with free causality1. R-type
– e can be computed from a given f– f can be computed from a given e– certain nonlinearities may constitute an exception
e = φ(f) f = φ−1(e)
45 / 45
Bond graphs
Meaning of bond graphs:• describes various physical domains in the same way• expresses simple addition rules for effort and flow variables• illustrates the structure of a system from its components• translates physical laws into graphical interactions• formalism prone to object-oriented programming