Modeling to Mars: a NASA Model Based Systems Engineering ...

Modeling Engineering Systems K. Craig 1
Modeling Engineering Systems
Electrical-ElectronicsEngineer
Controls Engineer
Mechatronic System Design
MechanicalEngineer
ComputerSystemsEngineer
Electro-Mechanics
SensorsActuators
EmbeddedControl
Modeling &Simulation

Modeling Engineering Systems K. Craig 2

Modeling Engineering Systems K. Craig 3
Engineering System Investigation Process
Physical
System
System
Measurement
Measurement
Analysis
Physical
Model
Mathematical
Model
Parameter
Identification
Mathematical
Analysis
Comparison:
Predicted vs.
Measured
Design
Changes
Is The
Comparison
Adequate ?
NO
YES
START HERE
The cornerstone of
modern engineering
practice !
Engineering
System
Investigation
ProcessModeling

Modeling Engineering Systems K. Craig 4
• Apply the steps in the process when:
– An actual physical system exists and one desires to
understand and predict its behavior.
– The physical system is a concept in the design process
that needs to be analyzed and evaluated.
• After recognizing a need for a new product or service, one
generates design concepts by using: past experience
(personal and vicarious), awareness of existing hardware,
understanding of physical laws, and creativity.
• The importance of modeling and analysis in the design
process has never been more important. Design concepts
can no longer be evaluated by the build-and-test approach
because it is too costly and time consuming. Validating the
predicted dynamic behavior in this case, when no actual
physical system exists, then becomes even more dependent
on one's past hardware and experimental experience.
Modeling Engineering Systems K. Craig 5
• What is a Physical Model?
– In general, a physical model is an imaginary physical system
which resembles an actual system in its most significant
features, but which is simpler, more ideal, and is thereby
more amenable to analytical studies.
– There is a hierarchy of physical models of varying complexity
possible.
– The difference between a physical system and a physical
model is analogous to the difference between the actual
physical terrain and a map.
– Not oversimplified, not overly complicated - a slice of reality.
– The very crux of engineering analysis and the hallmark of
every successful engineer is the ability to make shrewd and
viable approximations which greatly simplify the system and
still lead to a rapid, reasonably accurate prediction of its
behavior.

Modeling Engineering Systems K. Craig 6
• What is a Mathematical Model?
– We apply the Laws of Nature to the Physical Model,
NOT to the Physical System, to obtain the
Mathematical Model.
– What Laws of Nature?
• Newton’s Laws of Motion
• Maxwell’s Equations of Electromagnetism
• Laws of Thermodynamics
– Once we have the Mathematical Model of the
Physical Model, we then solve the equations, either
analytically or numerically, or both to get the greatest
insight, to predict how the Physical Model behaves.
This predicted behavior must then be compared to
the actual measured behavior of the Physical System.

Modeling Engineering Systems K. Craig 7
Nonlinear Principle of Superposition
Does Not ApplyNonlinear Differential
Equations
Linear Principle of Superposition
AppliesLinear Differential
Equations
Distributed Dependent Variables are
Functions of Space & TimePartial Differential
Equations
Lumped Dependent Variables are
Functions Only of TimeOrdinary Differential
Equations
Time-Varying Model Parameters Vary in
TimeEquations with Time-
Varying Parameters
Stationary Model Parameters are
Constant in TimeEquations with
Constant Parameters
Continuous Dependent Variables defined
over Continuous Range of
Independent Variables
Differential Equations
Discrete Dependent Variables defined
only for Distinct Values of
Independent Variables
Time-Difference
Equations
Classification of System Models

Modeling Engineering Systems K. Craig 8
Ideal Linear System Elements

Modeling Engineering Systems K. Craig 9
Balance: The Key to Success
Computer Simulation Without Experimental Verification
Is At Best Questionable, And At Worst Useless!

Modeling Engineering Systems K. Craig 10
Balance in Engineering is the Key!
• The essential characteristic of an engineer and
the key to success is a balance between the
following sets of skills:
– modeling (physical and mathematical), analysis
(closed-form and numerical simulation), and control
design (analog and digital) of dynamic physical
systems
– experimental validation of models and analysis and
understanding the key issues in hardware
implementation of designs

Modeling Engineering Systems K. Craig 11
• Dynamic Physical System
– Any collection of interacting elements for which there
are cause-and-effect relationships among the time-
dependent variables. The present output of the system
depends on past inputs.
• Analysis of the Dynamic Behavior of Physical
Systems
– Cornerstone of modern technology
– More than any other field links the engineering
disciplines
• Purpose of a Dynamic System Investigation
– Understand & predict the dynamic behavior of a system
– Modify and/or control the system, if necessary

Modeling Engineering Systems K. Craig 12
• Essential Features of the Study of Dynamic
Systems
– Deals with entire operating machines and
processes rather than just isolated components.
– Treats dynamic behavior of mechanical, electrical,
electromechanical, fluid, thermal, chemical, and
mixed systems.
– Emphasizes the behavioral similarity between
systems that differ physically and develops general
analysis and design tools useful for all kinds of
physical systems.
– Sacrifices detail in component descriptions so as to
enable understanding of the behavior of complex
systems made from many components.
Modeling Engineering Systems K. Craig 13
– Uses methods which accommodate component
descriptions in terms of experimental
measurements, when accurate theory is lacking or
is not cost-effective, and develops universal lab
test methods for characterizing component
behavior.
– Serves as a unifying foundation for many practical
application areas, e.g., vibrations, measurement
systems, control systems, acoustics, vehicle
dynamics, etc.
– Offers a wide variety of computer software to
implement its methods of analysis and design.

Modeling Engineering Systems K. Craig 14
Electro-Dynamic Vibration Exciter
Physical System vs. Physical Model

Modeling Engineering Systems K. Craig 15
• This "moving coil" type of device converts an electrical
command signal into a mechanical force and/or motion and
is very common, e.g., vibration shakers, loudspeakers,
linear motors for positioning heads on computer disk
memories, and optical mirror scanners.
• In all these cases, a current-carrying coil is located in a
steady magnetic field provided by permanent magnets in
small devices and electrically-excited wound coils in large
ones.
• Two electromechanical effects are observed in such
configurations:
– Generator Effect: Motion of the coil through the magnetic field
causes a voltage proportional to velocity to be induced into the coil.
– Motor Effect: Passage of current through the coil causes it to
experience a magnetic force proportional to the current.
Modeling Engineering Systems K. Craig 16
• Flexure Kf is an intentional soft spring (stiff, however, in
the radial direction) that serves to guide the axial motion
of the coil and table.
• Flexure damping Bf is usually intentional, fairly strong,
and obtained by laminated construction of the flexure
spring, using layers of metal, elastomer, plastic, and so
on.
• The coupling of the coil to the shaker table would ideally
be rigid so that magnetic force is transmitted undistorted
to the mechanical load. Thus Kt (generally large) and Bt
(quite small) represent parasitic effects rather than
intentional spring and damper elements.
• R and L are the total circuit resistance and inductance,
including contributions from both the shaker coil and the
amplifier output circuit.

Modeling Engineering Systems K. Craig 17
t t f t f t t c t t c t
c c t c t t c t
i c
M x K x B x B (x x ) K (x x )
M x B (x x ) K (x x ) Ki
Li e Ri Kx
Equations
of Motion
f t f t t tt t
t t t tt t
ic c
t t t tc c
c c c c c
0 1 0 0 0
0K K B B K Bx x0
M M M M 0x x
0 0 0 1 0 0ex x
K B K B 0Kx x
M M M M M 1i i
LK R0 0 0
L L
State-Space
Representation
Mathematical Modeling: Laws of Nature applied to Physical Model

Modeling Engineering Systems K. Craig 18
Analytical Frequency Response Plots
-100
-80
-60
-40
-20
0
20
Magnitu
de (
dB
)
100
101
102
103
104
105
106
107
90
180
270
360
450
540
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
Typical
Parameter
Values
(SI Units)
L = 0.0012
R = 3.0
K = 190
Kt = 8.16E8
Bt = 3850
Kf = 6.3E5
Bf = 1120
Mc = 1.815
Mt = 6.12
resonance due to flexures
parasitic resonance
due to coil-table
coupling

Modeling Engineering Systems K. Craig 19
Experimental Frequency Response Plot
B&K
PM Vibration Exciter
Type 4809
Modeling Engineering Systems K. Craig 20
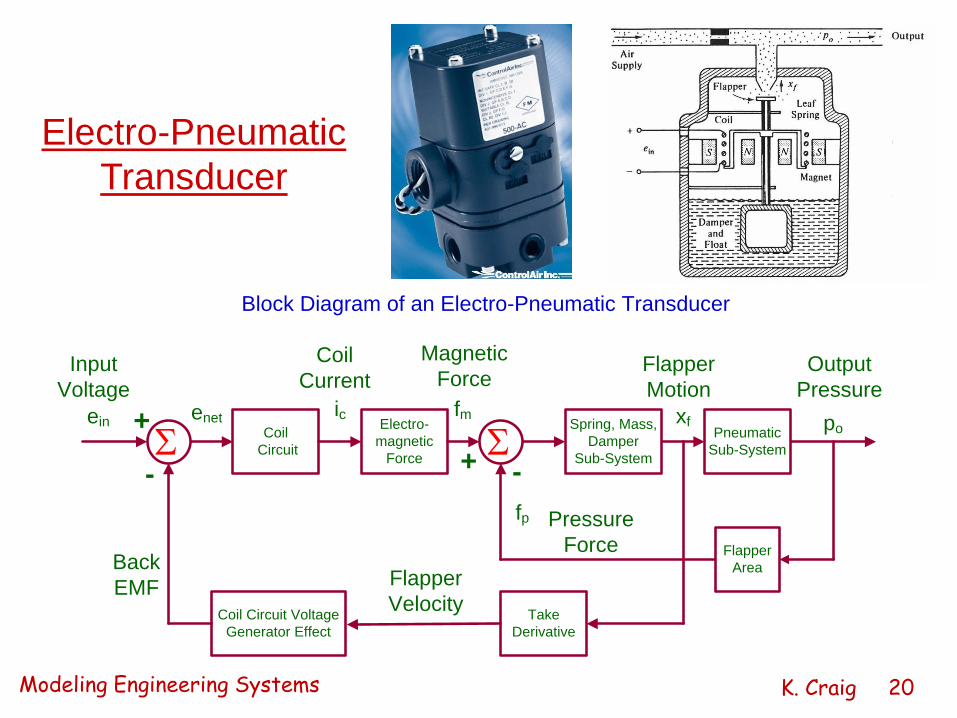
Electro-Pneumatic
Transducer
Coil
Circuit
Electro-
magnetic
Force
+
- + -
Spring, Mass,
Damper
Sub-System
Pneumatic
Sub-System
Flapper
Area
Take
Derivative
Coil Circuit Voltage
Generator Effect
einenet
Back
EMF Flapper
Velocity
ic fm
fp
xf po
Output
Pressure
Flapper
Motion
Pressure
Force
Magnetic
ForceCoil
CurrentInput
Voltage
Block Diagram of an Electro-Pneumatic Transducer
Modeling Engineering Systems K. Craig 21
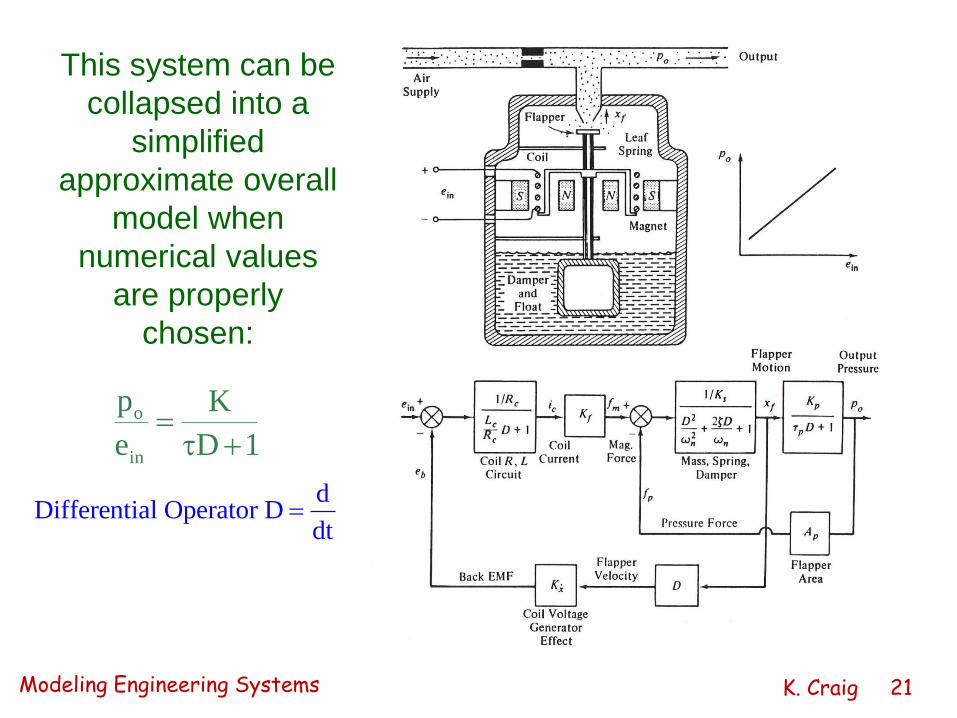
This system can be
collapsed into a
simplified
approximate overall
model when
numerical values
are properly
chosen:
o
in
p K
e D 1
dDifferential Operator D
dt

Modeling Engineering Systems K. Craig 22
• It is interesting to note here that while the block
diagram shows one input for the system, i.e.,
command voltage ein , there are possible undesired
inputs that must also be considered.
• For example, the ambient temperature will affect the
electric coil resistance, the permanent magnet
strength, the leaf-spring stiffness, the damper-oil
viscosity, the air density, and the dimensions of the
mechanical parts. All these changes will affect the
system output pressure po in some way, and the
cumulative effects may not be negligible.

Modeling Engineering Systems K. Craig 23
Temperature Feedback
Control System:
A Larger-Scale
Engineering System
Bridge
CircuitAmplifier
+
-
Controller
Electro-
Pneumatic
Transducer
ValveChemical
Process
Thermistor
RV
eE
RC
Desired
Temperature
(set with RV)
Block Diagram of an Temperature Control System
Actual
Temperature
(measured with
RC)
eM pM xVTC

Modeling Engineering Systems K. Craig 24
• Note that in the block diagram of this system, the
detailed operation of the electropneumatic transducer
is not made apparent; only its overall input/output
relation is included.
• The designer of the temperature feedback-control
dynamic system would consider the electropneumatic
transducer an off-the-shelf component with certain
desirable operating characteristics.
• The methods of system dynamics are used by both
the electropneumatic transducer designer and the
designer of the larger temperature feedback-control
system.

Modeling Engineering Systems K. Craig 25
Physical Modeling
Less Real, Less Complex, More Easily Solved
Truth Model Design Model
More Real, More Complex, Less Easily Solved
Hierarchy Of Models
Always Ask: Why Am I Modeling?

Modeling Engineering Systems K. Craig 26
• Physical System
– Define the physical system to be studied, along with
the system boundaries, input variables, and output
variables.
• Physical System to Physical Model
– In general, a physical model is an imaginary physical
system which resembles an actual system in its
salient features, but which is simpler, more ideal, and
is thereby more amenable to analytical studies.
There is a hierarchy of physical models of varying
complexity possible.
– Not oversimplified, not overly complicated - a slice of
reality.

Modeling Engineering Systems K. Craig 27
– The astuteness with which approximations are
made at the onset of an investigation is the very
crux of engineering analysis.
– The ability to make shrewd and viable
approximations which greatly simplify the system
and still lead to a rapid, reasonably accurate
prediction of its behavior is the hallmark of every
successful engineer.
– What is the purpose of the model? Develop a set
of performance specifications for the model based
on the specific purpose of the model. What
features must be included? How accurately do
they need to be represented?

Modeling Engineering Systems K. Craig 28
– The challenges to physical modeling are formidable:
• Dynamic behavior of many physical processes is
complex.
• Cause and effect relationships are not easily
discernible.
• Many important variables are not readily identified.
• Interactions among the variables are hard to
capture.
• Engineering Judgment is the Key!

Modeling Engineering Systems K. Craig 29
– In modeling dynamic systems, we consider matter
and energy as being continuously, though not
necessarily uniformly, distributed over the space
within the system boundaries.
– This is the macroscopic or continuum point of view.
We consider the system variables as quantities which
change continuously from point to point in the system
as well as with time and this always leads to a
distributed-parameter physical model which results in
a partial differential equation mathematical model.
– Models in this most general form behave most like the
real systems at the macroscopic level.

Modeling Engineering Systems K. Craig 30
– Because of the mathematical complexity of these
models, engineers find it necessary and desirable to
work with less exact models in many cases.
– Simpler models which concentrate matter and energy
into discrete lumps are called lumped-parameter
physical models and lead to ordinary differential
equation mathematical models.
– An understanding of the difference between
distributed-parameter and lumped-parameter models
is vital to the intelligent formulation and use of lumped
models.
– The time-variation of the system parameters can be
random or deterministic, and if deterministic, variable
or constant.
Modeling Engineering Systems K. Craig 31
• Comments on Truth Model vs. Design Model
– In modeling dynamic systems, we use engineering
judgment and simplifying assumptions to develop a
physical model. The complexity of the physical model
depends on the particular need, and the intelligent
use of simple physical models requires that we have
some understanding of what we are missing when we
choose the simpler model over the more complex
model.
– The truth model is the model that includes all the
known relevant characteristics of the real system.
This model is often too complicated for use in
engineering design, but is most useful in verifying
design changes or control designs prior to hardware
implementation.

Modeling Engineering Systems K. Craig 32
– The design model captures the important features
of the process for which a control system is to be
designed or design iterations are to be performed,
but omits the details which you believe are not
significant.
– In practice, you may need a hierarchy of models of
varying complexity:
• A very detailed truth model for final
performance evaluation before hardware
implementation
• Several less complex truth models for use in
evaluating particular effects
• One or more design models

Modeling Engineering Systems K. Craig 33
Approximation Mathematical
Simplification
Neglect small effects Reduces the number and
complexity of the equations of
motion
Assume the environment is
independent of system motions
Reduces the number and
complexity of the equations of
motion
Replace distributed
characteristics with appropriate
lumped elements
Leads to ordinary (rather than
partial) differential equations
Assume linear relationships Makes equations linear; allows
superposition of solutions
Assume constant parameters Leads to constant coefficients in
the differential equations
Neglect uncertainty and noise Avoids statistical treatment
Modeling Engineering Systems K. Craig 34
• Neglect Small Effects
– Small effects are neglected on a relative basis. In
analyzing the motion of an airplane, we are unlikely to
consider the effects of solar pressure, the earth's
magnetic field, or gravity gradient. To ignore these
effects in a space vehicle problem would lead to
grossly incorrect results!
• Independent Environment
– In analyzing the vibration of an instrument panel in a
vehicle, we assume that the vehicle motion is
independent of the motion of the instrument panel.
Modeling Engineering Systems K. Craig 35
• Lumped Characteristics
– In a lumped-parameter model, system dependent
variables are assumed uniform over finite regions of
space rather than over infinitesimal elements, as in a
distributed-parameter model. Time is the only
independent variable and the mathematical model is
an ordinary differential equation.
– In a distributed-parameter model, time and spatial
variables are independent variables and the
mathematical model is a partial differential equation.
– Note that elements in a lumped-parameter model do
not necessarily correspond to separate physical parts
of the actual system.
Modeling Engineering Systems K. Craig 36
– A long electrical transmission line has resistance,
inductance, and capacitance distributed continuously
along its length. These distributed properties are
approximated by lumped elements at discrete points
along the line.
– It is important to note that a lumped-parameter model,
which may be valid in low-frequency operations, may
not be valid at higher frequencies, since the neglected
property of distributed parameters may become
important. For example, the mass of a spring may be
neglected in low-frequency operations, but it becomes
an important property of the system at high
frequencies.
Modeling Engineering Systems K. Craig 37
• Linear Relationships
– Nearly all physical elements or systems are inherently
nonlinear if there are no restrictions at all placed on
the allowable values of the inputs, e.g., saturation,
dead-zone, square-law nonlinearities.
– If the values of the inputs are confined to a sufficiently
small range, the original nonlinear model of the
system may often be replaced by a linear model
whose response closely approximates that of the
nonlinear model.
– When a linear equation has been solved once, the
solution is general, holding for all magnitudes of
motion.
Modeling Engineering Systems K. Craig 38
– Linear systems also satisfy conditions for
superposition.
– The superposition property states that for a system
initially at rest with zero energy: (1) multiplying the
inputs by any constant multiplies the outputs by the
same constant, and (2) the response to several inputs
applied simultaneously is the sum of the individual
responses to each input applied separately.
• Constant Parameters
– Time-varying systems are ones whose characteristics
change with time.
– Physical problems are simplified by the adoption of a
model in which all the physical parameters are
constant.

Modeling Engineering Systems K. Craig 39
• Neglect Uncertainty and Noise
– In real systems we are uncertain, in varying degrees,
about values of parameters, about measurements,
and about expected inputs and disturbances.
Disturbances contain random inputs, called noise,
which can influence system behavior.
– It is common to neglect such uncertainties and noise
and proceed as if all quantities have definite values
that are known precisely.
Modeling Engineering Systems K. Craig 40
• Summary
– The most realistic physical model of a dynamic
system leads to differential equations of motion that
are:
• nonlinear, partial differential equations with time-
varying and space-varying parameters
• These equations are the most difficult to solve.
– The simplifying assumptions discussed lead to a
physical model of a dynamic system that is less
realistic and to equations of motion that are:
• linear, ordinary differential equations with constant
coefficients
• These equations are easier to solve and design
with.

Modeling Engineering Systems K. Craig 41
Classes of Systems

Modeling Engineering Systems K. Craig 42
Pure and Ideal Elements vs. Real Devices
• A pure element refers to an element (spring, damper,
inertia, resistor, capacitor, inductor, etc.) which has only the
named attribute.
• For example, a pure spring element has no inertia or friction
and is thus a mathematical model (approximation), not a
real device.
• The term ideal, as applied to elements, means linear, that
is, the input/output relationship of the element is linear, or
straight-line. The output is perfectly proportional to the
input.
• A device can be pure without being ideal and ideal without
being pure.
Modeling Engineering Systems K. Craig 43
• From a functional engineering viewpoint, nonlinear
behavior may often be preferable, even though it leads
to difficult equations.
• Why do we choose to define and use pure and ideal
elements when we know that they do not behave like the
real devices used in designing systems?
– Once we have defined these pure and ideal elements,
we can use these as building blocks to model real
devices more accurately.
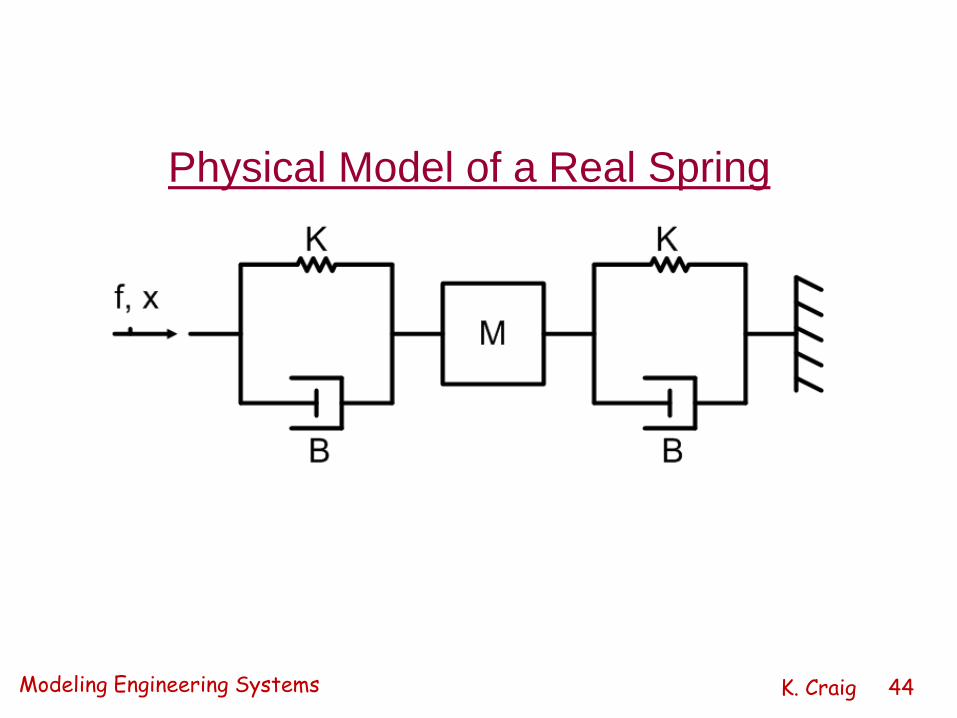
• For example, if a real spring has significant friction and
mass, we model it as a combination of pure/ideal spring,
mass, and damper elements, which may come quite
close in behavior to the real spring.
Modeling Engineering Systems K. Craig 44
Physical Model of a Real Spring

Modeling Engineering Systems K. Craig 45
• There are three basic types of building blocks,
two that can store energy and one that
dissipates energy.
– All Mechanical Systems have three attributes - mass,
springiness, and energy dissipation. The basic
elements corresponding to these attributes are inertia
(mass), damper (friction), and spring (compliance).
– All Electrical Systems have three attributes -
inductance, resistance, and capacitance. The
corresponding basic elements are inductor, resistor,
and capacitor.
Modeling Engineering Systems K. Craig 46
Mechanical System Elements
• It is hard to imagine any engineering system that does
not have mechanical components.
• Motion and force are concepts used to describe the
behavior of engineering systems that employ mechanical
components.
• The three basic mechanical building block elements are:
– Spring (elasticity or compliance) element
– Damper (friction or energy dissipation) element
– Mass (inertia) element
• There are both translational and rotational versions of
these basic building blocks.
Modeling Engineering Systems K. Craig 47
• These are passive (non-energy producing) devices.
• Driving Inputs are force and motion sources which cause
elements to respond.
• Each of the elements has one of two possible energy
behaviors:
– stores all the energy supplied to it
– dissipates all energy into heat by some kind of
“frictional” effect
• Spring stores energy as potential energy.
• Mass stores energy as kinetic energy.
• Damper dissipates energy into heat.
• The Dynamic Response of each element is important.
Modeling Engineering Systems K. Craig 48
• Spring Element
– A spring is a fundamental mechanical component found
intentionally or unintentionally in almost every
mechanical system.
– Real-world spring is neither pure nor ideal.
– Real-world spring has inertia and friction.
– Pure spring has only elasticity - it is a mathematical
model, not a real device.
– Some dynamic operation requires that spring inertia
and/or damping not be neglected.
– Ideal spring is linear. However, nonlinear behavior may
often be preferable and give significant performance
advantages.
FF
x1 x2
K2 1F K(x x )
Modeling Engineering Systems K. Craig 49
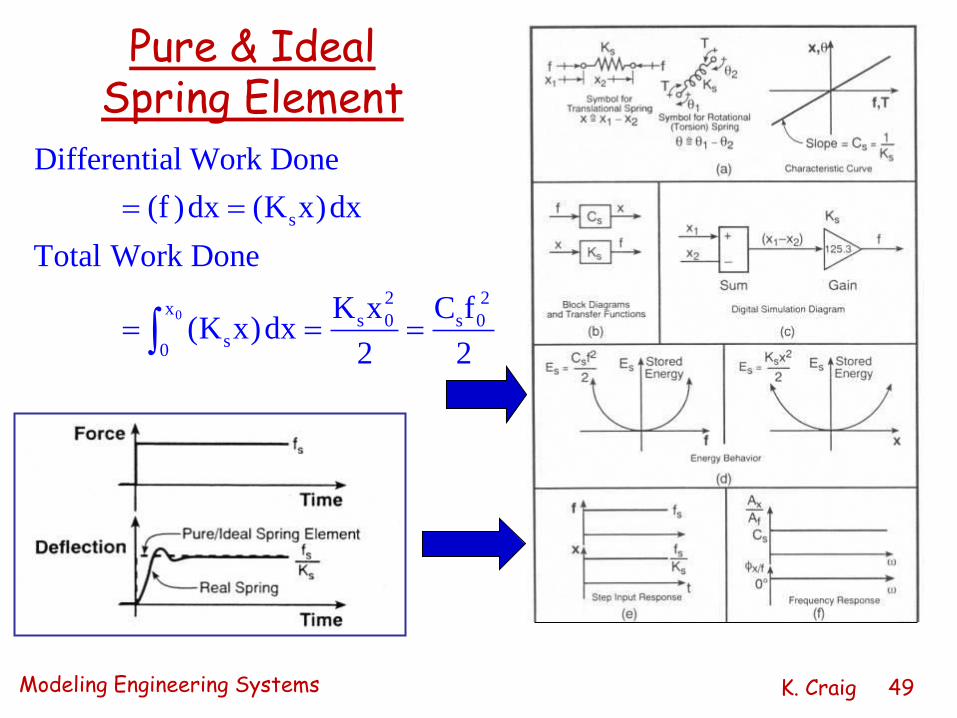
0
s
2 2x
s 0 s 0s
0
Differential Work Done
(f )dx (K x)dx
Total Work Done
K x C f (K x)dx
2 2
Pure & IdealSpring Element

Modeling Engineering Systems K. Craig 50
• Damping Element
– A damper is a mechanical component often found in
engineering systems.
– A pure damper dissipates all the energy supplied to it,
i.e., converts the mechanical energy to thermal
energy.
– Various physical mechanisms, usually associated
with some form of friction, can provide this dissipative
action, e.g.,
• Coulomb (dry friction) damping
• Material (solid) damping
• Viscous (fluid) damping

Modeling Engineering Systems K. Craig 51
– Shown is a typical mechanical viscous damper. If the
mass and springiness of the piston and cylinder are
small, then the force will be a function of the relative
velocity between the piston and the cylinder.
– Forces on the two ends of the damper are exactly
equal and opposite at all times (just like a spring);
pure springs and dampers have no mass or inertia.
This is NOT true for real springs and dampers.
B
FF
v1 v2
2 1F B(v v )

Modeling Engineering Systems K. Craig 52
Pure & IdealDamper Element
Step Input
Force
causes instantly
(a pure damper
has no inertia) a
Step of dx/dt
and a
Ramp of x
Modeling Engineering Systems K. Craig 53
• Mass or Inertia Element
– All real mechanical components used in engineering
systems have mass.
– A designer rarely inserts a component for the purpose
of adding inertia; the mass or inertia element often
represents an undesirable effect which is unavoidable
since all materials have mass.
– There are some applications in which mass itself
serves a useful function, e.g., flywheels – a flywheel
is an energy-storage device and can be used as a
means of smoothing out speed fluctuations in engines
or other machines.

Modeling Engineering Systems K. Craig 54
– Newton’s Law defines the behavior of mass elements
and refers basically to an idealized “point mass”:
– The concept of rigid body is introduced to deal with
practical situations. For pure translatory motion,
every point in a rigid body has identical motion.
– Real physical bodies never display ideal rigid
behavior when being accelerated.
– The pure and ideal inertia element is a model, not a
real object. Real inertias may be impure (have some
springiness and friction) but are very close to ideal.
forces (mass)(acceleration)
MF
a
F Ma

Modeling Engineering Systems K. Craig 55
Pure & IdealInertia Element
Real inertias may be
impure (have some
springiness and friction) but
are very close to ideal.
2 2
x 1 1(D) (D)
f MD T JD
Inertia Element stores energy
as kinetic energy:
2 2Mv J or
2 2
Modeling Engineering Systems K. Craig 56
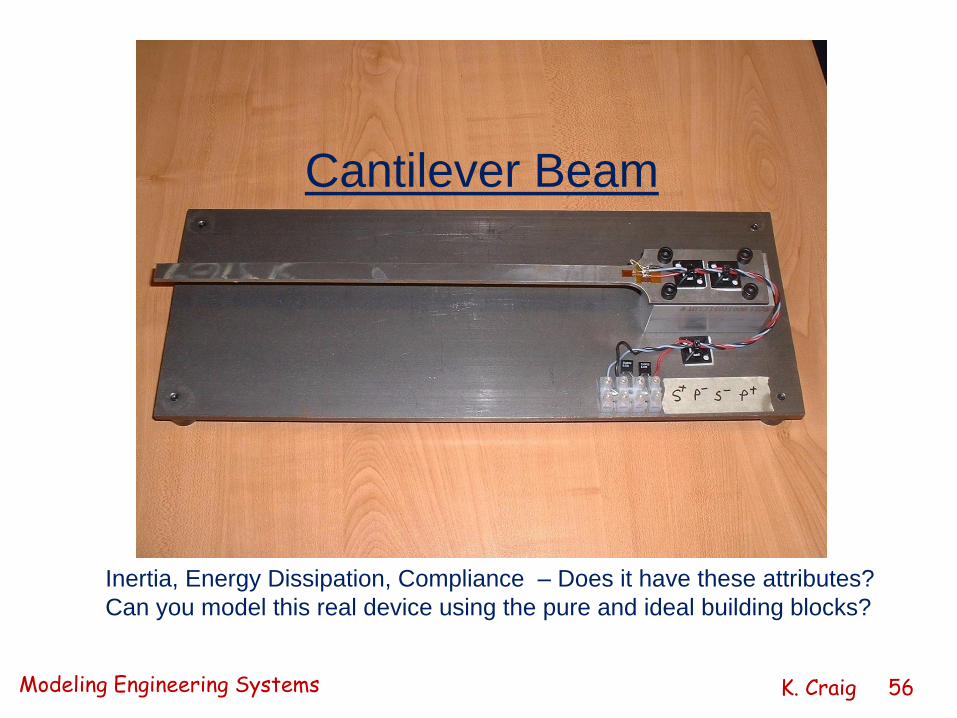
Cantilever Beam
Inertia, Energy Dissipation, Compliance – Does it have these attributes?
Can you model this real device using the pure and ideal building blocks?

Modeling Engineering Systems K. Craig 57
Ideal vs. Real Sources
• External driving agencies are physical quantities which
pass from the environment, through the interface into the
system, and cause the system to respond.
• In practical situations, there may be interactions between
the environment and the system; however, we often use
the concept of ideal source.
• An ideal source (force, motion, voltage, current, etc.) is
totally unaffected by being coupled to the system it is
driving.
• For example, a “real” 6-volt battery will not supply 6 volts
to a circuit! The circuit will draw some current from the
battery and the battery’s voltage will drop.

Modeling Engineering Systems K. Craig 58
Physical Model to Mathematical Model
• We derive a mathematical model to represent the physical
model, i.e., apply the Laws of Nature to the physical model and
write down the differential equations of motion.
• The goal is a generalized treatment of dynamic systems,
including mechanical, electrical, electromechanical, fluid,
thermal, chemical, and mixed systems.
– Define System: Boundary, Inputs, Outputs
– Define Variables: Through and Across Variables
– Write System Relations: Dynamic Equilibrium Relations and
Compatibility Relations
– Write Constitutive Relations: Physical Relations for Each
Element
– Combine: Generate State Equations

Modeling Engineering Systems K. Craig 59
• Define System
– A system must be defined before equilibrium and/or
compatibility relations can be written.
– Unless physical boundaries of a system are clearly
specified, any equilibrium and/or compatibility
relations we may write are meaningless.
• Define Variables
– Physical Variables
• Select precise physical variables (velocity, voltage,
pressure, flow rate, etc.) with which to describe the
instantaneous state of a system, and in terms of
which to study its behavior.

Modeling Engineering Systems K. Craig 60
– Through Variables
• Through variables (one-point variables) measure the
transmission of something through an element, e.g.,
– electric current through a resistor
– fluid flow through a duct
– force through a spring
– Across Variables
• Across variables (two-point) variables measure a
difference in state between the ends of an element,
e.g.,
– voltage drop across a resistor
– pressure drop between the ends of a duct
– difference in velocity between the ends of a
damper

Modeling Engineering Systems K. Craig 61
– In addition to through and across variables, integrated
through variables (e.g., momentum) and integrated
across variables (e.g., displacement) are important.
• Write System Relations
– Dynamic Equilibrium Relations
• Write dynamic equilibrium relations to describe the
balance - of forces, of flow rates, of energy - which
must exist for the system and its subsystems.
• Equilibrium relations are always relations among
through variables, e.g.,
– Kirchhoff’s Current Law (at an electrical node)
– continuity of fluid flow
– equilibrium of forces meeting at a point

Modeling Engineering Systems K. Craig 62
– Compatibility Relations
• Write system compatibility relations to describe
how motions of the system elements are
interrelated because of the way they are
interconnected.
• These are inter-element or system relations.
• Compatibility relations are always relations among
across variables, e.g.,
– Kirchhoff’s Voltage Law around a circuit
– pressure drop across all the interconnected
stages of a fluid system
– geometric compatibility in a mechanical system

Modeling Engineering Systems K. Craig 63
• Write Physical Relations for Each Element
– These relations are called constitutive physical
relations as they concern only individual elements or
constituents of the system.
– They are natural physical laws which the individual
elements of the system obey, e.g.,
• mechanical relations between force and motion
• electrical relations between current and voltage
• electromechanical relations between force and
magnetic field
• thermodynamic relations between temperature,
pressure, etc.

Modeling Engineering Systems K. Craig 64
– They are relations between through and across
variables of each individual physical element.
– They may be algebraic, differential, integral, linear or
nonlinear, constant or time-varying.
– They are purely empirical relations observed by
experiment and not deduced from any basic
principles.
• Combine System Relations and Physical
Relations to Generate System Differential
Equations
Modeling Engineering Systems K. Craig 65
• Study Dynamic Behavior
– Study the dynamic behavior of the mathematical
model by solving the differential equations of
motion either through mathematical analysis or
computer simulation.
– Dynamic behavior is a consequence of the system
structure - don’t blame the input!
– Seek a relationship between physical model
structure and behavior.
– Develop insight into system behavior.

Modeling Engineering Systems K. Craig 66
• Comparison: Actual vs. Predicted
– Compare the predicted dynamic behavior to the
measured dynamic behavior from tests on the actual
physical system; make physical model corrections, if
necessary.
• Make Design Decisions
– Make design decisions so that the system will behave
as desired:
• modify the system (e.g., change the physical
parameters of the system, add a sensor, change
the actuator or its location)
• control the system (e.g., augment the system,
typically by adding a dynamic system called a
compensator or controller)