Modeling and Analysis of Dynamic Systems - ETH Z · 2017-10-17 · Lecture5: Electromechanical...
22
Modeling and Analysis of Dynamic Systems Dr. Guillaume Ducard Fall 2017 Institute for Dynamic Systems and Control ETH Zurich, Switzerland G. Ducard c 1 / 22
Transcript of Modeling and Analysis of Dynamic Systems - ETH Z · 2017-10-17 · Lecture5: Electromechanical...

Modeling and Analysis of Dynamic Systems
Dr. Guillaume Ducard
Fall 2017
Institute for Dynamic Systems and Control
ETH Zurich, Switzerland
G. Ducard c© 1 / 22

Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 2 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Pelton Turbine: presentationPelton Turbine: modeling
Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 3 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Pelton Turbine: presentationPelton Turbine: modeling
Example: Pelton Turbine in a Hydro-electric Power Plant
G. Ducard c© 4 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Pelton Turbine: presentationPelton Turbine: modeling
Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 5 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Pelton Turbine: presentationPelton Turbine: modeling
w
v
R
Rω
w −Rω
w −Rω
dmω
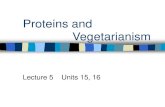
Figure: Pelton turbine, definition of system variables.
Questions: (answered during the class on the board)
1 What is the mean force acting on the Pelton turbine? FT = f(w, ω,∗
V )?
2 What is the resulting wheel torque: TT = g(w,ω,∗
V )?
3 What is the power being transferred from the fluid to the turbine?
G. Ducard c© 6 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 7 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
Introduction
Electromagnetic systems often can be formulated as RLC networks:
resistances (R)
inductances (L)
capacitances (C)
Two classes of reservoir elements are important:
magnetic energy: stored in magnetic fields B; and
electric energy: stored in electric fields E.
G. Ducard c© 8 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
Mathematical modeling
Element Capacitance Inductance
Energy WE = 1
2C · U2(t) WM = 1
2L · I2(t)
Level variable U(t) (voltage) I(t) (current)
Conservation law C ·d
dtU(t) = I(t) L ·
d
dtI(t) = U(t)
The electrical power is P (t) = U(t) · I(t).
G. Ducard c© 9 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
Working with RLC networks, two rules (“Kirchhoff’s laws”) areuseful:
1: The algebraic sum of all currents in each network node iszero.
2: The algebraic sum of all voltages following a closed networkloop is zero.
These rules are equivalent to the energy balance and are usuallymore convenient to use.
G. Ducard c© 10 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 11 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
I(t) L R
Cy(t)u(t) UL(t) UR(t)
UC(t)
Step 1: Inputs and Outputs
1 Input: u(t), input voltage
2 Output: y(t), output voltage
Step 2: Energy reservoirs
1 Magnetic energy in L
2 Electric energy in C
Step 3: ”Equivalent energy balance”: Kirchhoff rule
UL(t) + UR(t) + UC(t) = u(t)G. Ducard c© 12 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
RecallsElectric Oscillator
Step 4: Differential equations
“C” and ”L law”:
UL(t) = L ·
d
dtI(t), I(t) = C ·
d
dtUC(t)
and Ohm’s law:UR(t) = R · I(t)
Step 5: Reformulation and result
Definitions: y(t) = UC(t), I(t) =d
dtQ(t)
Reformulation: I(t) = C ·d
dty(t), d
dtI(t) = C ·
d2
dt2y(t)
Result: L · C ·d2
dt2y(t) +R · C ·
d
dty(t) + y(t) = u(t)
G. Ducard c© 13 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 14 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
Most electric motors used in control loops are rotational.Classification: according to the commutation mechanisms used:
1 Classical DC drives have a mechanical commutation of thecurrent in the rotor coils and constant (permanent magnet) ortime-varying stator fields (external excitation).
2 Modern brushless DC drives have an electronic commutationof the stator current and permanent magnet on the rotor (i.e.,no brushes).
3 AC drives have an electronic commutation of the statorcurrent and use self-inductance to build up the rotor fields.
G. Ducard c© 15 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
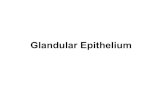
DC motor
Figure: Principle of a DC motor (picture from Wikipedia)
G. Ducard c© 16 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
DC Motor Principle
G. Ducard c© 17 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
Outline
1 Lecture 5: Hydraulic SystemsPelton Turbine: presentationPelton Turbine: modeling
2 Lecture 5: Electromagnetic SystemsRecallsElectric Oscillator
3 Lecture 5: Electromechanical SystemsPermanently Excited DC Motor: introductionModeling of a DC Motor
G. Ducard c© 18 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
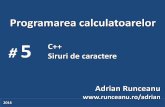
I(t) LR Θ
Tl(t)
Tm(t)u(t)
ω(t)
UL(t)UR(t)
Uind(t)
Step 1: Input & Output
System input voltage u(t) (control input) and load torqueTl(t) (disturbance).
System output measurement of rotor speed ω(t).
Remarks:The motor is permanently excited, parameters κ in the motor and generator laws are constant.
The mechanical part has friction losses.G. Ducard c© 19 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
Step 2: relevant reservoirs
the magnetic energy stored in the rotor coil, level variable I(t);
the kinetic energy stored in the rotor, level variable ω(t).
Step 3: two energy conservation laws
L ·d
dtI(t) = −R · I(t)− Uind(t) + u(t)
Θ ·d
dtω(t) = Tm(t)− Tl(t)− d · ω(t)
(1)
G. Ducard c© 20 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
Step 4: generator and the motor laws
Pelec = Pmech
Uind(t) · I(t) = κ · ω(t) · I(t) = Tm(t) · ω(t)
→ Tm(t) = κ · I(t)
(2)
Inserting equation (2) into equation (1),
L ·d
dtI(t) = −R · I(t)− κ · ω(t) + u(t)
Θ ·d
dtω(t) = κ · I(t)− Tl(t)− d · ω(t)
(3)
G. Ducard c© 21 / 22

Lecture 5: Hydraulic SystemsLecture 5: Electromagnetic Systems
Lecture 5: Electromechanical Systems
Permanently Excited DC Motor: introductionModeling of a DC Motor
Next lecture + Upcoming Exercise
Next lecture
Case study: Loudspeaker
Thermodynamics systems
Examples: Stirred Tank, Heat Exchanger, Gas Receiver
Next exercises: Hydro Power Plant
G. Ducard c© 22 / 22