Modeling
46
Modeling Hierarchical Transformations Hierarchical Models Scene Graphs
description
Modeling. Hierarchical Transformations Hierarchical Models Scene Graphs. Modeling Objects. A prototype has a default size, position, and orientation You need to perform modeling transformations to position it within the scene. myCube() - Create a unit cube with its origin at (0,0,0). - PowerPoint PPT Presentation
Transcript of Modeling

Modeling
Hierarchical TransformationsHierarchical Models
Scene Graphs

Modeling Objects A prototype has a default size, position, and
orientation You need to perform modeling transformations
to position it within the scene
myCube() - Create a unit cube with its origin at (0,0,0)
To create a 2 x 0.1 x 2 table top - need to call glScalef(2, 0.1, 2)

Instance Transformation Start with a prototype object (a
symbol) Each appearance of the object in
the model is an instance Must scale, orient, position Defines instance transformation

Symbol-Instance TableCan store a model
by assigning a number to each symbol and storing the parameters for the instance transformation

Symbol-instance table does not show relationships between parts of model
Consider model of car Chassis + 4 identical wheels Two symbols
Rate of forward motion determined by rotational speed of wheels
Relationships in Car Model

Structure Through Function Callscar(speed){ chassis(speed) wheel(right_front, speed); wheel(left_front , speed); wheel(right_rear , speed); wheel(left_rear , speed);}
• Fails to show relationships well• Look at problem using a graph

Graphs Set of nodes and edges (links) Edge connects a pair of nodes
Directed or undirected Cycle: directed path that is a loop
loop

Tree Graph in which each node (except
the root) has exactly one parent node May have multiple children Leaf or terminal node: no children
root node
leaf node

Tree Model of Car

DAG Model If we use the fact
that all the wheels are identical, we get a directed acyclic graph Not much different
than dealing with a tree

Modeling with Trees Must decide what information to place
in nodes and what to put in edges Nodes
What to draw Pointers to children
Edges May have information on incremental
changes to transformation matrices (can also store in nodes)

Robot Arm
robot arm parts in their own coordinate systems

Articulated Models Robot arm is an example of an
articulated model Parts connected at joints Can specify state of model by giving all joint angles

Relationships in Robot Arm Base rotates independently
Single angle determines position
Lower arm attached to base Its position depends on
rotation of base Must also translate relative
to base and rotate about connecting joint

Relationships in Robot Arm Upper arm attached to
lower arm Its position depends on
both base and lower arm
Must translate relative to lower arm and rotate about joint connecting to lower arm

Required Matrices Rotation of base: Rb
Apply M = Rb to base Translate lower arm relative to base: Tla
Rotate lower arm around joint: Rla
Apply M = Rb Tla Rla to lower arm Translate upper arm relative to upper arm: Tua
Rotate upper arm around joint: Rua
Apply M = Rb Tla Rla Tua Rua to upper arm

OpenGL Code for Robotrobot_arm(){ glRotate(theta, 0.0, 1.0, 0.0); base(); glTranslate(0.0, h1, 0.0); glRotate(phi, 0.0, 1.0, 0.0); lower_arm(); glTranslate(0.0, h2, 0.0); glRotate(psi, 0.0, 1.0, 0.0); upper_arm();}

Tree Model of Robot Note code shows relationships
between parts of model Can change “look” of parts
easily without altering relationships
Simple example of tree model Want a general node structurefor nodes

Scene Graphs Encoding this information in the code
is not very productive. Want it to be flexible, data-driven and extensible.
Scene-graphs provide this functionality. OpenInventor (http://www.coin3d.org/) Open Scene Graph (http://www.openscenegraph.com/
) Many others

Hierarchical Modeling Triangles, parametric curves
and surfaces are the building blocks from which more complex real-world objects are modeled.
Hierarchical modeling creates complex real-world objects by combining simple primitive shapes into more complex aggregate objects.

Articulated Models

Multiple Components Different Materials

Scene Layout – Worlds

Hierarchical models

Hierarchical models

Hierarchical models

Hierarchical models

Hierarchical models

Hierarchical Grouping of Objects Logical organization of scene
chair
table
fruits
ground

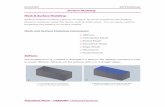
Simple Example with Groups
Group { numObjects 3 Group { numObjects 3 Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { numObjects 2 Group { Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { Box { <BOX PARAMS> } Sphere { <SPHERE PARAMS> } Sphere { <SPHERE PARAMS> } } } Plane { <PLANE PARAMS> } }

Adding MaterialsGroup { numObjects 3 Material { <BLUE> } Group { numObjects 3 Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { numObjects 2 Material { <BROWN> } Group { Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { Material { <GREEN> } Box { <BOX PARAMS> } Material { <RED> } Sphere { <SPHERE PARAMS> } Material { <ORANGE> } Sphere { <SPHERE PARAMS> } } } Material { <BLACK> } Plane { <PLANE PARAMS> } }

Adding Transformations

Hierarchical Transformation of Objects Transforms
position logical groupings of objects within the scene

Simple Example with TransformsGroup {
numObjects 3 Transform { ZRotate { 45 } Group { numObjects 3 Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } } Transform { Translate { -2 0 0 } Group { numObjects 2 Group { Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { Box { <BOX PARAMS> } Sphere { <SPHERE PARAMS> } Sphere { <SPHERE PARAMS> } } } } Plane { <PLANE PARAMS> } }

Separating types of transformation Note that we have treated translations,
rotations, etc. as separate But they are all represented by 4x4
matrices and there is no technical reason not to combine them into the resulting matrix
It’s just simpler for the human programmer, and corresponds to the handle of 3D modeling/animation packages

Hierarchical modeling in OpenGL Commands to change current
transformation glTranslate, glScale, etc.
Affects the state, i.e. all following commands will undergo this transformation
Utilities to maintain a matrix stack (to revert to previous state)
Difference between model and view matrix

Model vs. Projection matrix It is almost the same to rotate the camera or the objects Main difference:
Lighting
This is why OpenGL has two transforms: model and projection
glMatrixMode( GL_MODELVIEW ); Tells openGL that next matrix commands deal with the
objects. typically used for modeling & animation
glMatrixMode(GL_PROJECTION); Tells OpenGL we deal with the camera space ( typically used to change viewpoint & focal length

Managing the state To reset
everything: glLoadIdentity();
OpenGL stores a stack of matrices You don’t need to
remember, OpenGL remembers
glPushMatrix() glPopMatrix

Managing the state Push matrix when
you start rendering a group
Pop once you are done

Scene Graph Convenient Data structure for scene
representation Transformations Materials, color Multiple instances
Basic idea: Hierarchical Tree Useful for manipulation/animation
Especially for articulated figures Useful for rendering too
Multi-pass rendering, occlusion culling

Scene Graphs Basic idea: Tree Comprised of several node
types: Shape: 3D geometric objects Transform:
Affect current transformation Property: Appearance,
texture, etc. Group: Collection of
subgraphs

Traversal Depth first
Top to bottom, left to right

Traversal State The State is updated during
traversal Transformations, properties Influence of nodes can be complex E.g. bottom to top

Other Scene Nodes Switch or Selector Nodes
Level of detail Different rendering styles Damaged v. undamaged states
Sequence Nodes Animated sequence
Objects Textures Transformations

Object Following or Tethering Can attach an object to the node of
another object (or group them in a parent node.
Provide an offset to have the other object tag along with the object under control.

Camera Tethering Many times, we want the camera to follow
an entity. Need to get the coordinate frame for the
entity. Traverse the scene graph to the entity.
Or, need to get the current camera system Attach camera and determine transformations
to the root of the scene graph.