
MODELAGEM NUMÉRICA COM VALIDAÇÃO EXPERIMENTAL DE ...livros01.livrosgratis.com.br/cp043142.pdf ·...
188
UNIVERSIDADE FEDERAL DE MINAS GERAIS PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA MODELAGEM NUMÉRICA COM VALIDAÇÃO EXPERIMENTAL DE ESCOAMENTO ATRAVÉS DO BOCAL INFERIOR DE UM ELEMENTO COMBUSTÍVEL NUCLEAR André Augusto Campagnole dos Santos Belo Horizonte, 11 de Janeiro de 2008
Transcript of MODELAGEM NUMÉRICA COM VALIDAÇÃO EXPERIMENTAL DE ...livros01.livrosgratis.com.br/cp043142.pdf ·...

UNIVERSIDADE FEDERAL DE MINAS GERAIS PROGRAMA DE PÓS-GRADUAÇÃO EM
ENGENHARIA MECÂNICA
MODELAGEM NUMÉRICA COM VALIDAÇÃO
EXPERIMENTAL DE ESCOAMENTO ATRAVÉS DO BOCAL
INFERIOR DE UM ELEMENTO COMBUSTÍVEL NUCLEAR
André Augusto Campagnole dos Santos
Belo Horizonte, 11 de Janeiro de 2008

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

André Augusto Campagnole dos Santos
MODELAGEM NUMÉRICA COM VALIDAÇÃO
EXPERIMENTAL DE ESCOAMENTO ATRAVÉS DO BOCAL
INFERIOR DE UM ELEMENTO COMBUSTÍVEL NUCLEAR
Dissertação apresentada ao Programa de Pós-
Graduação em Engenharia Mecânica da
Universidade Federal de Minas Gerais, como
requisito parcial à obtenção do título de Mestre em
Engenharia Mecânica.
Área de concentração: Calor e Fluidos.
Orientador: Geraldo Augusto Campolina França
(Universidade Federal de Minas Gerais).
Co-orientador: Moysés Alberto Navarro
(Centro de Desenvolvimento da Tecnologia Nucelar)
Belo Horizonte
Escola de Engenharia da UFMG
2008

A minha bobinha linda.

AGRADECIMENTOS A minha querida família a qual devo quem eu sou hoje, em especial a minha mãe e meu pai,
Maria José e Robson, que inconscientemente despertaram em mim o gosto pela ciência e me
guiaram neste caminho com muita dedicação e carinho. A minha vovó Regina, a Tita, peça
rara, de coração gigante, sempre um exemplo de esforço, honestidade e trabalho. A Marilene,
a Lena, que sempre bem humorada, me aturou durante a adolescência. A minha irmã Ana, que
sempre me perturbou, mas sempre estava disposta a ajudar quando necessário. As minhas
irmãs Helena e Alessandra que, mesmo longe, deram grande apoio. A meus irmãos Bruno e
Miguel. Sem eles eu não seria nada. E aos meus grandes amigos Gustavo, Montanha, Raul e
Hugo pela amizade e companheirismo durante muitas batalhas.
Ao meu orientador Geraldo Augusto Campolina França pelo auxilio durante o trabalho e na
confecção da dissertação.
Um agradecimento especial ao Dr. Moysés Alberto Navarro, um amigo brilhante, exemplo de
profissional e ser humano que, com enorme paciência, me aturou durante estes últimos anos.
A todo pessoal e os estagiários do CDTN por aturarem minhas insanidades e ajudarem sempre
colocando pra rodar as minhas simulações.
Ao pessoal da INB e do CTM-SP por possibilitar a realização deste trabalho.
Ao Sr. Eng. Josué Alceu “Dispor” que me levou ao CDTN e é o verdadeiro culpado por este
mestrado.
A minha noiva, minha alma gêmea, Cristina, minha bobinha linda, razão pela qual vivo e sou
feliz. Eu te amo demais!
A todos que me auxiliaram de alguma maneira e que, por um lapso de memória, tenha
esquecido de agradecer.
MUITO OBRIGADO!!

“... Try not. Do… or do not. There is no try.” George Lucas (Master Yoda). Star Wars Episode V: The Empire Strikes Back, 1980.

SUMÁRIO
LISTA DE FIGURAS ............................................................................................................. iv
LISTA DE TABELAS...........................................................................................................viii
LISTA DE SÍMBOLOS........................................................................................................... x
RESUMO ............................................................................................................................... xiv
ABSTRACT ............................................................................................................................ xv
1. INTRODUÇÃO .................................................................................................................... 1
1.1. O ELEMENTO COMBUSTÍVEL DE UM REATOR NUCLEAR..................................................... 2
1.2. OBJETIVOS........................................................................................................................ 7
2. REVISÃO BIBLIOGRÁFICA............................................................................................ 9
2.1. ASPECTOS GERAIS ............................................................................................................ 9
2.2. MÉTODO ANALÍTICO IDELCHIK (1960 E 1986)................................................................ 10
2.3. A MECÂNICA DOS FLUIDOS COMPUTACIONAL ................................................................. 13
2.3.1. Equações fundamentais.......................................................................................... 16
2.3.2. Turbulência e as equações mediadas..................................................................... 17
2.3.3. Equações de Navier-Stokes mediadas por Reynolds.............................................. 20
2.3.4. Modelos de viscosidade turbulenta ........................................................................ 22
Modelo k-ε.................................................................................................................... 23
Modelo k-ω................................................................................................................... 25
Modelo SST (Shear Stress Transport) .......................................................................... 26
2.3.5. Formulação do escoamento próximo à parede...................................................... 28
Função de parede escalável ......................................................................................... 31
Função de parede automática...................................................................................... 33
2.3.6. Condições de contorno........................................................................................... 35
2.3.7. O método dos volumes finitos................................................................................. 37
Esquema espacial das diferenças centrais................................................................... 42
Esquema espacial upwind de primeira ordem ............................................................. 43
Esquema espacial de segunda ordem híbrido.............................................................. 43
Esquema temporal de Euler ......................................................................................... 45

ii
2.3.8. Acoplamento pressão-velocidade........................................................................... 46
2.3.9. Método de solução ................................................................................................. 47
2.3.10. Malhas.................................................................................................................. 50
2.4. ESTUDOS EXPERIMENTAIS E NUMÉRICOS REALIZADOS EM GEOMETRIAS SIMILARES À DO
BP ......................................................................................................................................... 53
3. METODOLOGIA EXPERIMENTAL............................................................................. 60
3.1. ASPECTOS GERAIS .......................................................................................................... 60
3.1. CIRCUITO HIDRODINÂMICO DO REATOR (CHR) .............................................................. 60
3.2. SEÇÃO DE TESTES E INSTRUMENTAÇÃO .......................................................................... 62
3.3. CONDIÇÕES E PROCEDIMENTOS EXPERIMENTAIS ............................................................ 68
3.4. LEVANTAMENTO E PROCESSAMENTO DOS DADOS........................................................... 69
3.4.1. Parâmetros primários ............................................................................................ 69
3.4.2. Parâmetros derivados ............................................................................................ 72
4. METODOLOGIA NUMÉRICA....................................................................................... 75
4.1. ASPECTOS GERAIS .......................................................................................................... 75
4.2. ESTUDO DE MALHA......................................................................................................... 78
4.2.1. Estudo de malha em placas perfuradas ................................................................. 79
4.2.2. Estudo de malha no direcionador de fluxo ............................................................ 83
4.3. ESTUDO DE MODELOS DE TURBULÊNCIA......................................................................... 86
4.4. ANÁLISE DE GEOMETRIAS E CONDIÇÕES PRESENTES NOS EXPERIMENTOS NO BP............ 87
4.4.1. Chanfros nos orifícios da placa perfurada ............................................................ 88
4.4.2. Folga entre o canal de escoamento e o BP............................................................ 88
4.4.3. Geometria que antecede a seção de testes ............................................................. 89
4.5. VALIDAÇÃO ATRAVÉS DE COMPARAÇÃO A VALORES EXPERIMENTAIS............................ 92
4.6. RESUMO DAS SIMULAÇÕES REALIZADAS ........................................................................ 93
5. RESULTADOS E DISCUSSÃO ....................................................................................... 95
5.1. RESULTADOS EXPERIMENTAIS ........................................................................................ 95
5.2. RESULTADOS NUMÉRICOS............................................................................................... 99
5.2.1. Estudo de malha em placas perfuradas ................................................................. 99
Dimensão oa dl no plano de refinamento da placa perfurada ................................ 100
Dimensão oa dl no plano de refinamento após a placa perfurada ......................... 105
Extensão de influência do plano de refinamento após a placa perfurada................. 110

iii
5.2.2. Estudo de malha no direcionador de fluxo .......................................................... 118
5.2.3. Estudo de modelos de turbulência ....................................................................... 123
5.2.4. Influência do chanfro nos orifícios da placa perfurada ...................................... 135
5.2.6. Influência da folga entre o canal e a placa perfurada......................................... 138
5.2.7. Influência da geometria que antecede a seção de testes...................................... 141
5.2.8. Validação através de comparação com valores experimentais ........................... 148
6. CONCLUSÃO .................................................................................................................. 157
7. REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................... 160
ANEXO I ...............................................................................................................................164

iv
LISTA DE FIGURAS
Figura 1.1 – Reator nuclear (Fonte: site das Indústrias Nucleares do Brasil (INB) –
www.inb.gov.br). ............................................................................................................... 3
Figura 1.2 – Principais componentes de um reator PWR com quatro circuitos primários.
(Fonte: Shultis e Faw 2002). .............................................................................................. 4
Figura 1.3 – O vaso de pressão do núcleo (Fonte: Shultis e Faw 2002). ................................... 4
Figura 1.4 – O elemento combustível nuclear (Fonte: Shultis e Faw 2002). ............................. 6
Figura 1.5 – Bocal inferior padrão do elemento combustível nuclear (Fonte: site das Indústrias
Nucleares do Brasil (INB) – www.inb.gov.br). ................................................................. 6
Figura 2.1 – Vista isométrica de uma placa perfurada em um canal. ...................................... 11
Figura 2.2 – A tarefa inicial do método numérico: discretizar o domínio contínuo (Fonte:
Maliska, 1995).................................................................................................................. 14
Figura 2.3 – Espectro de energia cinética turbulenta (Fonte: Silveira Neto, 2003). ................ 18
Figura 2.4 – Medida pontual típica de velocidade em um escoamento turbulento. ................. 20
Figura 2.5 – Escoamento próximo a uma superfície sólida (Fonte: ANSYS CFX 10.0, 2005). 29
Figura 2.6 – Superfície do Volume Finito (Fonte: ANSYS CFX 10.0, 2005)........................... 38
Figura 2.7 – Elemento de malha isolado (Fonte: ANSYS CFX 10.0, 2005). ............................ 39
Figura 2.8 – Estratégia de solução geral do CFX. .................................................................... 48
Figura 2.9 – Método Multigrid algébrico................................................................................. 50
Figura 2.10 – Camadas de malha extrudada geradas usando inflação (inflation).................... 52
Figura 3.1 – Fluxograma simplificado do Circuito Hidrodinâmico do Reator (CHR) ............ 61
Figura 3.2 – Foto do Circuito Hidrodinâmico do Reator (CHR). ............................................ 61
Figura 3.3 – Seção de testes. .................................................................................................... 63
Figura 3.4 – Montagem da seção. ............................................................................................ 64
Figura 3.5 – Bocal, seção de testes e o envoltório com seção de testes instalados no CHR.... 65
Figura 3.6 – Posicionamento do bocal e das tomadas de pressão na seção de testes............... 65
Figura 4.1. – Eixo de coordenadas e ponto de origem para todos os cálculos. Figura da
esquerda destaca a região simulada da placa perfurada. .................................................. 77
Figura 4.2 – Exemplo das condições de contorno aplicadas para as simulações..................... 77
Figura 4.3 – O BP separado em placa perfurada e direcionador de fluxo................................ 78
Figura 4.4 – Planos de refinamento na placa perfurada. .......................................................... 80

v
Figura 4.5 – Comprimento da aresta do elemento ( al )............................................................ 81
Figura 4.6 – Direcionador de fluxo real (a) e o simulado com simplificações (b)................... 84
Figura 4.7 – Refinamento no direcionador de fluxo. ............................................................... 85
Figura 4.8 – Geometria que antecede a seção de testes. .......................................................... 90
Figura 4.9 – Detalhes e cotas da geometria simulada. ............................................................. 91
Figura 5.1 – Posição das tomadas de pressão........................................................................... 96
Figura 5.2 – Diferenças de pressão entre as tomadas em função de Reynolds (a) e da vazão (b)
para o BP. ......................................................................................................................... 97
Figura 5.3 – Comportamento da pressão ao longo do canal com o BP.................................... 98
Figura 5.4 – Coeficiente de perda de carga (K27) em função de Reynolds para o BP. ............ 99
Figura 5.5 – Planos de refinamento na placa perfurada. ........................................................ 100
Figure 5.6 – Pressão ao longo do canal para diferentes malhas na placa perfurada. ............. 102
Figura 5.7 – Contornos da componente de velocidade Vz na entrada do orifício central da
placa perfurada com 81 orifícios para diferentes oa dl ................................................ 103
Figura 5.8 – Perfil de velocidades do escoamento 2 mm após a entrada no orifício (Posição 1)
e na saída do orifício (Posição 2) da placa perfurada com 81 orifícios.......................... 104
Figura 5.9 – Detalhe da malha em um orifício da placa perfurada com 81 orifícios. ............ 105
Figure 5.10 – Pressão ao longo da linha central do canal para diferentes malhas após a placa
perfurada......................................................................................................................... 107
Figura 5.11 – Contornos da componente de velocidade Vz na placa perfurada e saída dos
orifícios para diferentes refinamentos posteriores à placa perfurada com 81 orifícios.. 108
Figura 5.12 – Perfis de velocidade adimensional e de intensidade turbulenta após a placa
perfurada com 81 orifícios. ............................................................................................ 109
Figura 5.13 – Malha posterior a placa perfurada com 81 orifícios. ....................................... 110
Figura 5.14 – Pressão ao longo do canal para diferentes condições de escoamento.............. 112
Figura 5.15 – Taxas de variação da diferença de pressão entre intervalos de 0,0014 m ao
longo do canal para diferentes condições de escoamento. ............................................. 113
Figura 5.16 – Taxas de variação da diferença de pressão em intervalos de 0,0014 m ao longo
do canal para diferentes condições de escoamento simuladas na malha com 13 diâmetros
de orifício de extensão de influência do plano de refinamento após a placa perfurada. 115
Figura 5.17 – Pressão ao longo do canal para diferentes placas perfuradas. ......................... 117

vi
Figura 5.18 – Diferença de pressão entre intervalos de 0,0014 m ao longo do canal para
diferentes placas perfuradas. .......................................................................................... 117
Figura 5.19 – Pressão ao longo do canal para diferentes malhas no direcionador de fluxo. . 119
Figura 5.20 – Perfis de velocidade e intensidade turbulenta no direcionador de fluxo. ........ 121
Figura 5.21 – Contornos de Vz no plano de diagonal do direcionador de fluxo..................... 122
Figura 5.22 – Contornos da componente de velocidade Vz em um plano normal a direção de
escoamento do direcionador de fluxo para diferentes malhas........................................ 122
Figura 5.23 – Malha no direcionador de fluxo em corte diagonal. ........................................ 123
Figura 5.24 – Pressão ao longo do canal para diferentes modelos de turbulência. ................ 125
Figura 5.25 – Contornos da componente de velocidade Vz na entrada do orifício central da
placa perfurada para diferentes modelos de turbulência. ............................................... 125
Figura 5.26 – Perfis adimensionais de Vz (a) e de intensidade turbulenta (b) 2 mm após a
entrada de fluido no orifício central da placa perfurada................................................. 127
Figura 5.27 – Perfis adimensionais de Vz (a) e de intensidade turbulenta (b) 2 mm da saída de
fluido do orifício central da placa perfurada. ................................................................. 128
Figura 5.28 – Contornos da componente de velocidade Vz em um corte central da placa
perfurada com 81 orifícios para diferentes modelos de turbulência. ............................. 131
Figure 5.29 – Pressão ao longo da linha central do canal para diferentes malhas próxima da
parede. ............................................................................................................................ 132
Figura 5.30 – Perfis de velocidade e de intensidade turbulenta 2 mm (Posição 1) e 18 mm
(Posição 2) após a entrada de fluido no orifício central da placa perfurada com 81
orifícios........................................................................................................................... 133
Figura 5.31 – Pressão ao longo da linha central do canal para a placa perfurada com 225
orifícios com e sem chanfros nas extremidades dos orifícios. ....................................... 135
Figura 5.32 – Perfil de velocidade adimensional e de intensidade turbulenta após a placa
perfurada com 225 orifícios com e sem chanfros nas extremidades dos orifícios. ........ 136
Figura 5.33 – Perfil de intensidade turbulenta ao longo do canal para a placa perfurada com
225 orifícios com e sem chanfros nas extremidades dos orifícios. ................................ 137
Figura 5.34 – Diferenças entre os perfis de velocidade nos orifícios com e sem chanfro. .... 138
Figura 5.35 – Pressão ao longo da linha central do canal na placa perfurada com 81 orifícios
com e sem uma folga entre o canal e a placa. ................................................................ 139

vii
Figura 5.36 – Contornos de velocidades para a placa perfurada de 81 orifícios com e sem uma
folga entre a placa e o canal. .......................................................................................... 140
Figura 5.37 – Malha da geometria que antecede a seção de testes. ....................................... 141
Figura 5.38 – Contorno de Vz na geometria que antecede a seção de testes simplificada. .... 142
Figura 5.39 – Contorno de Vz na placa perfurada de 81 orifícios com perfis de velocidade e
turbulência uniformes (a) e não uniformes (b) na entrada do domínio. ......................... 143
Figura 5.40 – Pressão adimensional ao longo da linha central do canal da placa perfurada com
81 orifícios com perfis de velocidade e turbulência uniformes e não-uniformes. ......... 144
Figura 5.41 – Perfis de pressão e velocidade adimensional ao longo da seção transversal do
canal na placa perfurada com 81 orifícios – perfis de velocidade e de turbulência não-
uniformes na entrada. ..................................................................................................... 145
Figura 5.42 – Perfis de velocidade e de intensidade turbulenta após a placa perfurada com 81
orifícios para perfis de velocidade e turbulência uniforme e não-uniforme. ................. 146
Figura 5.43 – Pressão ao longo da linha central do canal na placa perfurada com 81 orifícios
para diferentes intensidades turbulentas na entrada do domínio.................................... 147
Figura 5.44 – Perfil de intensidade turbulenta ao longo do canal na placa perfurada com 81
orifícios para diferentes intensidades turbulentas na entrada do domínio. .................... 148
Figura 5.45 – Pressão estática ao longo do duto com o BP: experimentos x simulações
numéricas. ...................................................................................................................... 150
Figura 5.46 – Perfis de Vz adimensional nas cotas das tomadas de pressão do canal de
escoamento com o BP. ................................................................................................... 151
Figura 5.47 – Perfis de intensidade turbulenta nas cotas das tomadas de pressão do canal de
escoamento com o BP. ................................................................................................... 153
Figura 5.48 – Perda de carga experimental e numérica através do BP em função do número de
Reynolds......................................................................................................................... 154
Figura 5.49 – Perda de carga experimental e numérica através do BP em função da vazão. 155
Figura 5.50 – Coeficientes de perda de carga experimental e numérico em função do número
de Reynolds. ................................................................................................................... 155

viii
LISTA DE TABELAS
Tabela II.1 – Constantes do modelo de turbulência k-ε. .......................................................... 24
Tabela II.2 – Constantes do modelo turbulento k-ω. ............................................................... 25
Tabela III.1 – Dados dos principais componentes do CHR. .................................................... 60
Tabela III.2 – Características da seção experimental ............................................................... 62
Tabela III.3 – Faixa dos medidores utilizados ......................................................................... 68
Tabela III.4 – Vazões pré-estabelecidas para os experimentos................................................ 69
Tabela III.5 – Parâmetros i. ...................................................................................................... 70
Tabela III.6 – Faixas ajustadas dos transmissores iF . ............................................................. 71
Tabela III.7 – Incertezas de catálogo dos medidores para os parâmetros Yi. ........................... 71
Tabela III.8 – Incertezas relativas no cálculo da vazão............................................................ 74
Tabela IV.1 – Condições de contorno. ..................................................................................... 78
Tabela IV.2 – Características geométricas da placa perfurada com 81 orifícios. .................... 79
Tabela IV.3 – Matriz de simulações realizadas na placa perfurada com 81 orifícios.............. 82
Tabela IV.4 – Características geométricas das placas perfuradas simuladas........................... 83
Tabela IV.5 – Características geométricas do direcionador de fluxo. ..................................... 85
Tabela IV.6 – Matriz de simulações realizadas no direcionador de fluxo. .............................. 86
Tabela IV.7 – Resumo das simulações do estudo de malha..................................................... 93
Tabela IV.8 – Resumo das simulações do estudo de modelos de turbulência. ........................ 93
Tabela IV.9 – Resumo das simulações para análise de geometrias e condições presentes nos
experimentos no BP. ........................................................................................................ 94
Tabela IV.10 – Resumo das simulações para a validação através de comparação a valores
experimentais. .................................................................................................................. 94
Tabela V.1 – Condições experimentais.................................................................................... 95
Tabela V.2 – Diferenças de pressão medidas através do BP. .................................................. 96
Tabela V.3 – Perda de carga para diferentes malhas na placa perfurada. .............................. 101
Tabela V.4 – Benefícios de novos refinamentos na placa perfurada. .................................... 101
Tabela V.5 – Perda de carga para diferentes malhas após a placa perfurada......................... 106
Tabela V.6 – Benefícios de novos refinamentos posteriores à placa perfurada..................... 106
Tabela V.7 – Perda de carga para diferentes condições de escoamento. ............................... 111
Tabela V.8 – Perda de carga para diferentes condições de escoamento em malhas distintas.114

ix
Tabela V.9 – Comprimento de recuperação da pressão. ........................................................ 115
Tabela V.10 – Perda de carga para diferentes placas perfuradas. .......................................... 116
Tabela V.11 – Comprimento de recuperação da pressão para diferentes placas perfuradas.. 118
Tabela V.12 – Perda de carga para diferentes malhas no direcionador de fluxo. .................. 119
Tabela V.13 – Perda de carga para diferentes malhas no rasgo do direcionador de fluxo..... 120
Tabela V.14 – Perda de carga para diferentes modelos de turbulência.................................. 124
Tabela V.15 – Tensão média de atrito na parede ( ωτ ) da placa perfurada para diferentes
malhas e modelos de turbulência. .................................................................................. 129
Tabela V.16 – Perda de carga para diferentes malhas próxima a parede............................... 132
Tabela V.17 – Perda de carga para diferentes placas perfuradas. .......................................... 135
Tabela V.18 – Perda de carga na placa perfurada com 81 orifícios com e sem uma folga de
0,625 mm entre a placa e o canal de escoamento........................................................... 139
Tabela V.19 – Perda de carga na placa perfurada com 81 orifícios para diferentes intensidades
turbulentas na entrada do domínio. ................................................................................ 147
Tabela V.20 – Diferenças entre as perdas de carga numérica e experimental no BP. ........... 149
Tabela A.1 – Parâmetros da formulação Idelchik (1960) para escoamentos através de placas
perfuradas com Reynolds menor que 105....................................................................... 165

x
LISTA DE SÍMBOLOS
As dimensões são apresentadas em termo do comprimento (L), massa (M), tempo (T) e
temperatura (Θ) valores adimensionais são apresentados com o número 1.
Caracteres
Símbolo Descrição Dimensão Valor
Ai, Bi Constantes da reta ajustada com a incerteza de catálogo 1
1a Constante do modelo SST 1 0,31
1arg Variável auxiliar da função 1F 1
2arg Variável auxiliar da função 2F 1
C Constante da formulação próxima da parede 1 5,2
Cd Coeficiente de descarga 1
1εC Constante do modelo de turbulência k-ε 1 1,44
2εC Constante do modelo de turbulência k-ε 1 1,92
μC Constante do modelo de turbulência k-ε 1 0,09
ωkCD Variável auxiliar da função 1F 1
od Diâmetro do orifício L
hd Diâmetro hidráulico do orifício L
dfd Diâmetro interno do direcionador de fluxo do BP L
hD Diâmetro hidráulico do canal L
DP Diferença de pressão ML-1T-2
e Rugosidade L
E Constante do modelo de turbulência de parede 1 9,793
E(k) Espectro de energia em função do número de onda ML2T-2
f Coeficiente de área livre 1
of Área livre de um orifício L2
1F Função acoplador do modelo de turbulência SST 1
2F Limitador da tensão cisalhante turbulenta para o SST 1
G Vetor gravidade LT-2
I Intensidade turbulenta 1

xi
k Número de onda L-1
k Energia cinética turbulenta ML2T-2
K Coeficiente de resistência 1
l Comprimento característico da turbulência L
l Espessura de placa perfurada L
l a Comprimento médio de aresta do volume finito L
l x Comprimento L
L Comprimento característico hidrodinâmico da geometria L
m& , mq Vazão mássica MT-1
kP Produção de turbulência ML-1T-3
P, p Pressão estática ML-1T-2
p' Pressão modificada ML-1T-2
Pe Número de Peclet 1
qv Vazão volumétrica L3T-1
R Resistência na placa de coleta de dados [Ohms] 50,77
Re Número de Reynolds 1
S Tensor de tensões médias ML-1T-2
S Desvio padrão 1
t Tempo T
T Temperatura Θ
Tr Incerteza de catálogo dos medidores [Várias]
u Velocidade LT-1
τu Velocidade de fricção LT-1
∞u Velocidade fora da camada limite LT-1 +u , u* Velocidade adimensional próximo de parede 1
Ui Tensão [Volts]
Vz Componente de velocidade no sentido do eixo z LT-1
ν Volume específico ML-3
yΔ Distância entre a parede e o primeiro nó L +py Distância adimensional entre a parede e o primeiro nó L
+y , y* Distância adimensional da parede 1

xii
Letras gregas
Símbolo Descrição Dimensão Valor
α Ângulo de divisão do orifício – Parâmetro de malha L
α Coeficiente de dilatação linear T-1
α Constante do modelo de turbulência k-ω 1 0,55556
β Constante do modelo de turbulência k-ω 1 0,075
β Razão de áreas na placa de orifício 1
β ′ Constante do modelo de turbulência k-ω 1 0,09
ipβ Fator limitador do esquema de segunda ordem híbrido 1 δ Delta de Kronecker 1
δ Espessura da camada limite L
δ Incerteza 1
Δ Diferença 1
oΠ Perímetro total de um orifício L
Γ Difusividade ML-1T-1
1Φ Constante genérica do modelo de turbulência k-ε 1
2Φ Constante genérica do modelo de turbulência k-ω 1
3Φ Constante genérica do modelo de turbulência SST 1
ε Taxa de dissipação turbulenta L2T-3 Re0ε Constante para a formulação Idelchik (1960) L2T-3 Anexo I
ϕξ Constante para a formulação Idelchik (1960) 1 Anexo I κ Constante de Von Karman 1 0,41
ρ Massa específica ML-3
λ Fator de atrito 1
η Comprimento característico da estrutura de Kolmogorov L
μ Viscosidade dinâmica ML-1T-1
effμ Viscosidade efetiva, tμμ + ML-1T-1
εσ Constante do modelo de turbulência k-ε 1 1,3
kσ Constante do modelo de turbulência k-ω 1 2
ωσ Constante do modelo de turbulência k-ω 1 2
τ Tensão de cisalhamento ML-1T-2

xiii
τω Tensão de cisalhamento na parede ML-1T-2
ω Taxa de dissipação turbulenta especifica ML2T-3
Φ Variável adicional geral (escalar não reativo) ML-3
φ Variável geral (escalar)
Subscritos
Símbolo Descrição
24 Medida entre a posição dos taps 2 e 4
25 Medida entre a posição dos taps 2 e 5
26 Medida entre a posição dos taps 2 e 6
27 Medida entre a posição dos taps 2 e 7
i Eixo de coordenadas da variável
ip Ponto de integração
j Varredura da variável em todos os eixos de coordenada
k Varredura de todos os eixos de coordenadas
L Referente ao comprimento característico hidrodinâmico da geometria
po Placa de orifício
ref Variável de referência
st Seção de testes
stat Variável estática
t Turbulento
tot Variável total
o Referente ao orifício
Sobrescritos
Símbolo Descrição
´ Denota flutuações no escoamento turbulento __ Denota média
MAX Valor máximo da variável
MIN Valor mínimo da variável

xiv
RESUMO
O programa comercial de CFD, o ANSYS CFX 10.0, foi utilizado para definir um procedimento
numérico com a finalidade de avaliar a perda de carga em escoamento permanente,
incompressível e adiabático através do Bocal inferior Padrão (BP) do elemento combustível de
um reator nuclear. Os resultados numéricos foram comparados a resultados experimentais de
perda de carga obtidos no Circuito Hidrodinâmico do Reator (CHR) do Centro Tecnológico da
Marinha (CTMSP). Inicialmente foram realizados estudos em placas perfuradas, geometria
predominante no BP, aplicando-se simetria de 1/8 para determinar parâmetros ótimos de malha
e o modelo de turbulência mais adequado. Os modelos de turbulência RANS de duas equações
k-ε, k-ω e SST foram avaliados. A influência dos chanfros nos orifícios da placa perfurada do
BP, de uma folga entre o BP e o canal de escoamento presente nos experimentos, e da
geometria que antecede a seção de testes também foram avaliadas. As simulações
confirmaram que a presença dos chanfros provoca uma grande redução da perda de carga
(~40%) e do comprimento de recuperação da pressão na placa perfurada. A folga provoca uma
redução de ~5% na perda de carga devido ao escoamento próximo da parede e ao aumento da
seção transversal do canal. O aumento de malha impediu, devido a limitações computacionais,
que a folga fosse simulada no BP, mas uma compensação na vazão devido ao aumento da seção
transversal foi aplicada. Foi constatado que a geometria que antecede a seção de testes promove
uma não uniformidade nos perfis de velocidade e de turbulência que acarretam em redução de
~ 4% na perda de carga através da placa perfurada. A presença desta geometria foi omitida no
modelo final da simulação do BP por impossibilitar que a simetria de 1/8 fosse aplicada, o que
impediria a simulação. O BP foi então simulado em simetria de 1/8 com os modelos de
turbulência k-ε e SST para todas as condições experimentais, com perfis uniforme de velocidade
e turbulência na entrada do canal. Os resultados de perda de carga obtidos com o modelo SST e
k-ε foram em média ~19% e ~10% maiores, respectivamente, do que os obtidos
experimentalmente. As discrepâncias observadas podem ser associadas principalmente as
simplificações, realizadas devido a limitações computacionais, que mostraram uma tendência de
redução na perda de carga calculada. Este trabalho deverá subsidiar o desenvolvimento de um
elemento combustível nuclear avançado em curso na INB.
Palavras chaves: Elemento Combustível, Placa Perfurada, Mecânica dos Fluidos Computacional.

xv
ABSTRACT
The commercial CFD program, ANSYS CFX 10.0, was used to define a numerical procedure
to evaluate the pressure drop in a permanent, incompressible and adiabatic flow through the
standard Bottom end Piece (BP) of a nuclear fuel assembly. The numerical results were
compared to experimental pressure loss results obtained at the Reactor Hydrodynamic Circuit
(CHR) of the Centro Tecnológico da Marinha (CTMSP). Initial studies on 1/8 symmetry
perforated plates, which are the predominant geometry of the BP, were performed to define
the optimal mesh parameters and adequate turbulence model. The RANS two equations
turbulence models k-ε, k-ω and SST were assessed. The influences of the chamfers of the BP’s
perforated plate orifices, of a gap between the BP and the duct present in the experiments, and
of the geometry upstream of the test section were also appraised. The simulations confirmed
that the presence of chamfers causes a drastic reduction of both pressure loss (~40%) and
pressure recuperation length. The gap causes a reduction of ~5% of the pressure loss due to
both the flow near the wall and the increase of the cross section area of the duct. The increase
in the mesh prevented, due to computational limitations, the simulation of the gap with the
BP, but a compensation of the mass flow due to the increase of the cross section area was
applied. It was observed that the geometry upstream of the test section promotes a non-
uniform velocity and turbulence profiles that cause a ~4% reduction of the pressure loss at the
perforated plate. The presence of this upstream geometry was omitted in the final BP
simulation model for it disables the use of a 1/8 symmetry, which would prevent the
simulation. Then a 1/8 symmetry of the BP was simulated with the turbulence models k-ε and
SST for all experimental conditions, applying a uniform profile of velocity and turbulence at
the inlet. The pressure loss results obtained with the SST and k-ε models were in average
~19% and ~10% higher, respectively, than the experiments. The discrepancies observed can
be mainly associated to the simplifications, performed due to computational limitations, that
shown a tendency to reduce the calculated pressure loss. This work shall support the
development of a new advanced nuclear fuel element at INB.
Key Words: Fuel Element, Perforated Plate, Computational Fluid Dynamics.

1
1. INTRODUÇÃO
Escoamentos de fluido com transferência de massa e calor são processos freqüentes em
diversos sistemas e equipamentos de engenharia. O conhecimento dos mecanismos
básicos associados a esses processos assim como das metodologias utilizadas na
previsão de seus comportamentos tem exigido de pesquisadores e engenheiros elevados
e constantes esforços. Dois métodos são usados para estudar estes processos:
investigação experimental e análise teórica.
Experimentos em reproduções de escala integral constituem-se no melhor método para
prever o funcionamento de equipamentos. Eles são, todavia, extremamente caros e não
fornecem informações completas dos fenômenos envolvidos. Os dados obtidos se
referem apenas a grandezas globais, de modo que sua utilização fica restrita a
equipamentos similares. A extrapolação destas informações para configurações de
escoamento similares tem sido tradicionalmente realizada através do desenvolvimento
de modelos matemáticos simplificados que contém sempre algum grau de arbitrariedade,
o que diminui a confiabilidade dos resultados obtidos. O mesmo problema ocorre com a
realização de testes em modelos de menor escala, que por não reproduzirem todas as
características do caso real, implicam também na adoção de modelos para extrapolação
de resultados para a situação real.
Uma vez que soluções analíticas são impossíveis na maioria das situações de interesse da
indústria, foram desenvolvidas técnicas de solução numéricas passíveis de serem
implementadas em computador. Os códigos de análise termofluidodinâmica, dependendo do
nível de detalhe da modelagem, podem ser divididos em códigos de sistema, códigos de
componentes e códigos de fluidodinâmica computacional (CFD - Computational Fluid
Dynamics). Os códigos CFD resolvem as equações de conservação através da discretização
do domínio de interesse em escalas muito pequenas, possibilitando a utilização de malhas
com elevado número de nós, gerando, consequentemente, soluções com alto nível de
detalhamento.

2
Devido ao grande avanço tecnológico na área computacional, simulações numéricas podem
ser feitas com descrição espacial detalhada das grandezas de interesse e sua evolução ao longo
do tempo com rapidez e baixo custo, qualidades difíceis de serem obtidas nas simulações
experimentais. Devido a estas qualidades, têm crescido o interesse na aplicação de códigos
CFD no desenvolvimento de novos sistemas e componentes nucleares, assim como no
processo de licenciamento de instalações e equipamentos nucleares.
Recentemente, a fluidodinâmica computacional tem desempenhado papel relevante no projeto
de novos elementos combustíveis nucleares. Diferentes grades espaçadoras, disposições
geométricas e composições dos combustíveis têm sido avaliadas no que concerne ao
comportamento termo-hidráulico do elemento. Particular atenção tem recebido os bocais das
extremidades deste elemento. Novos bocais têm sido desenvolvidos com funções não apenas
estruturantes ou condicionadoras de fluxo, mas também de retenção de impurezas.
Com o intuito de determinar a perda de carga no escoamento através de um bocal inferior do
elemento combustível de um reator nuclear do tipo PWR, um procedimento numérico será
elaborado utilizando-se o programa CFD, o ANSYS CFX 10.0 (2005), visando também
explorar suas capacidades.
1.1. O elemento combustível de um reator nuclear
Reatores nucleares produzem enormes quantidades de energia térmica através de reações em
cadeia da fissão de partículas nucleares, usando relativamente pouco combustível quando
comparado a reações de combustão. Esta fonte de energia tem servido como alternativa aos
combustíveis fósseis na produção de eletricidade assim como na propulsão de submarinos e
navios. Recentemente, estão sendo implementadas usinas híbridas com as finalidades de
dessalinizar a água do mar e gerar energia.
A fissão nuclear é importante fonte de energia elétrica em muitos paises com recursos
limitados de combustível fóssil como, por exemplo, a França que produz mais de 70% de sua
energia elétrica por meio de reatores nucleares. No Brasil, foram construídos dois reatores,

3
Angra I e Angra II, do tipo PWR (Pressurized Water Reactor – Reator de água pressurizada).
O programa nuclear brasileiro foi sistematicamente abandonado pelos governantes durante as
últimas décadas, mas, devido à crise energética ocorrida recentemente no país, constatou-se a
necessidade de diversificação da matriz energética e espera-se uma retomada do
desenvolvimento do setor energético nuclear, acompanhando uma tendência mundial. Esta
tendência é resultante da crescente preocupação da sociedade com a degradação ambiental
aceitando a energia nuclear, por ser pouco poluidora, como uma alternativa viável.
Os PWR, padrão Angra II, são reatores que possuem basicamente três circuitos de água, como
mostrado na Figura 1.1. A água no circuito primário é bombeada para o núcleo do reator onde
remove a energia térmica nele produzida e cede esta energia à água do circuito secundário de
um gerador de vapor. O vapor gerado movimenta uma turbina com eixo acoplado a um
gerador elétrico. Em seguida, o vapor é condensado pela água de um terceiro circuito. A água
do circuito primário é mantida a uma pressão relativamente alta (~160 bar), mantendo-se no
estado líquido entre ~280 oC (entrada do núcleo) e ~330 oC (saída do núcleo). Água radioativa
gerada por eventual acidente no núcleo é contida no circuito primário.
Figura 1.1 – Reator nuclear (Fonte: site das Indústrias Nucleares do Brasil (INB) –
www.inb.gov.br).
Alguns dos principais componentes de um PWR podem ser vistos na Figura 1.2. É no núcleo,
no interior do vaso de pressão do reator, que ocorrem as reações nucleares e a conseqüente
geração da energia térmica. Um vaso de pressão típico do núcleo de um PWR pode ser visto
na Figura 1.3.

4
Pressurizador
Saída do vapor para a turbina
Gerador de vapor Saída do vapor para a turbina
Água do condensador
Água do condensador
Bomba
Vaso de pressão do reator
Pressurizador
Saída do vapor para a turbina
Gerador de vapor Saída do vapor para a turbina
Água do condensador
Água do condensador
Bomba
Vaso de pressão do reator
Figura 1.2 – Principais componentes de um reator PWR com quatro circuitos primários.
(Fonte: Shultis e Faw 2002).
Mecanismo de controle das barras de controle.
Barras de controle.
Plenum de saída.
Bocal de saída de água.
Placa de alinhamento do elemento combustível.Elemento combustível.
Cilindro do núcleo.
Revestimento do núcleo.
Suporte do núcleo.
Tubos guias de instrumentação.
Bocal de entrada de água.
Tubos guias das barras de controle.
Vaso de pressão.
Mecanismo de controle das barras de controle.
Barras de controle.
Plenum de saída.
Bocal de saída de água.
Placa de alinhamento do elemento combustível.Elemento combustível.
Cilindro do núcleo.
Revestimento do núcleo.
Suporte do núcleo.
Tubos guias de instrumentação.
Bocal de entrada de água.
Tubos guias das barras de controle.
Vaso de pressão.
Figura 1.3 – O vaso de pressão do núcleo (Fonte: Shultis e Faw 2002).

5
A água do circuito primário entra no vaso através de bocais laterais superiores, escoa para
baixo na região anular entre o vaso e o cilindro que envolve o núcleo, alcançando a placa
inferior de suporte subindo através dos elementos combustíveis nucleares, removendo o calor
neles gerado, saindo, finalmente, através dos bocais situados na região superior do núcleo
para a tubulação que a conduz ao gerador de vapor.
O elemento combustível nuclear de reatores PWR é composto de pastilhas de dióxido de
urânio (UO2) levemente enriquecido, empilhadas dentro de longos tubos, chamados de varetas
combustíveis, com diâmetros externos de 10,75 mm, confeccionadas em liga metálica de
Zircaloy. O pequeno diâmetro permite que a energia térmica produzida pela desaceleração dos
produtos da fissão nas pastilhas seja rapidamente transferida para a água que escoa entre as
varetas. As varetas são agrupadas em arranjos quadrados de 16x16 posições. Algumas destas
posições são ocupadas por tubos guias de barras de controle. O controle da reatividade no
núcleo, ou seja, o aumento ou redução da potência produzida no núcleo é obtido através da
retirada ou inserção de barras contendo material absorvedor de nêutrons. Estes arranjos são
mantidos rígidos através de reticulados chamados grades espaçadoras que são posicionados ao
longo do elemento e de bocais posicionados nas extremidades superior e inferior. Um
elemento combustível típico é mostrado na Figura 1.4. Cada elemento permanece no reator
durante um período de até três anos antes de ser removido. O núcleo de ANGRA II possui
193 destes elementos com 236 varetas combustíveis cada um.
O bocal inferior do elemento combustível nuclear é composto de um direcionador de fluxo
com a forma de um tubo unido a uma placa posicionadora unida através de quatro cantoneiras
a uma placa perfurada. O direcionador permite o posicionamento correto do elemento na
placa inferior de suporte do núcleo do reator e conduz a água para a placa perfurada. Esta
placa tem a função de distribuir a água de maneira uniforme para as varetas combustíveis. É
nesta placa que as extremidades inferiores dos tubos guias são afixadas.
Existem inúmeras configurações para a placa perfurada do bocal. Nos reatores Angra I e II, a
placa dos bocais do tipo padrão (BP – Bocal Padrão) permite ainda filtrar grandes
particulados que possam estar no circuito primário. Nos bocais atualmente em
desenvolvimento, a função de filtragem do bocal é ampliada para a captura de pequenos

6
particulados, exigindo que a placa tenha orifícios de menor diâmetro. Estes bocais são
chamados de bocais do tipo filtro (BF – Bocal Filtro). A Figura 1.5 mostra um bocal inferior
BP e parte das varetas combustíveis.
Barra absorvedora.
Barra combustível.
Barra absorvedora e tubos guia.
Elemento das barras de controle (aranha).Bocal superior.
Placa espaçadora.
Bocal inferior.
Figura 1.4 – O elemento combustível nuclear (Fonte: Shultis e Faw 2002).
Varetas combustíveis
Direcionador
Placa perfurada
Grade espaçadora
Orifício posicionador
Bocal Inferior
Varetas combustíveis
Direcionador
Placa perfurada
Grade espaçadora
Orifício posicionador
Bocal Inferior
Figura 1.5 – Bocal inferior padrão do elemento combustível nuclear (Fonte: site das Indústrias
Nucleares do Brasil (INB) – www.inb.gov.br).

7
1.2. Objetivos
O processo de desenvolvimento de elementos combustíveis exige a avaliação, normalmente
realizada em investigações experimentais, de seu comportamento relativo à perda de carga,
eficiência de troca de calor e limites de fluxo de calor. Os custos destes experimentos,
entretanto, são relativamente altos, se o elemento completo é avaliado. Experimentos em
escalas ou em partes do elemento completo, exigindo gastos menores, podem ser realizados,
desde que se tenha a garantia de que os resultados possam ser extrapolados. A utilização de
ferramentas teóricas, particularmente as modelagens numéricas, pode ajudar não só no
planejamento destes experimentos como também na interpretação dos resultados neles
obtidos. A grande perda de carga presente no bocal inferior, em especial na placa perfurada,
torna imperativo um estudo aprofundado desta região do elemento combustível nuclear.
O objetivo geral deste trabalho é estabelecer uma metodologia adequada para a avaliação da
perda de carga no escoamento através de um bocal inferior BP e implementá-la no programa
comercial ANSYS CFX 10.0 (2005). Este trabalho deverá subsidiar o desenvolvimento de um
elemento combustível nuclear avançado em curso na INB.
Para atingir o objetivo geral, os seguintes objetivos específicos são almejados:
1) Estudo de malha computacional – serão determinados os parâmetros para a geração de
malhas ótimas que não interfiram nos resultados. Estes estudos serão feitos separando a
geometria do BP em duas: placa perfurada e direcionador de fluxo. Isto será feito para melhor
compreender os fenômenos que ocorrem nestes dois componentes e reduzir o tempo e custo
computacional dos cálculos, permitindo determinar a influência de cada parâmetro geométrico
na geração de malha. A metodologia analítica descrita no Handbook of Hydraulic Resistance
de Idelchik (1986) para determinar a perda de carga em placas perfuradas será usada como
referência para validar a metodologia de geração de malha para a placa perfurada.
2) Estudo de modelos de turbulência e formulação próxima de parede – será determinado o
modelo de turbulência e definida a formulação próxima de parede adequada para a simulação

8
do BP. Serão testados os modelos de turbulência k-ε, k-ω e SST, e as formulações de parede
automática e escalável (scalable).
3) Estudo das condições de contorno – serão determinadas as condições de contorno que
melhor refletem o escoamento obtido nos experimentos. Será avaliada a influência da
intensidade turbulenta na solução do problema.
4) Validação da metodologia – a metodologia numérica será validada comparando os
resultados obtidos numericamente com os obtidos experimentalmente. Será avaliada também
a influência da folga entre o BP e o duto de escoamento, e a influência do retificador de fluxo
presente na entrada da seção de testes experimental na medida da perda de carga no BP.

9
2. REVISÃO BIBLIOGRÁFICA
2.1. Aspectos gerais
No tratamento de um problema de engenharia, em geral três metodologias de abordagem são
possíveis: método experimental, método analítico e método numérico.
Os métodos experimental e analítico são amplamente difundidos e conhecidos, sendo
aplicados a centenas de anos. O método numérico, com a rápida evolução dos computadores,
vem sendo cada vez mais usado, e tem mostrado ser uma ferramenta bastante robusta e com
um custo menor em relação aos métodos experimentais. No entanto, ainda há uma grande
desconfiança com relação à universalidade desse método.
De fato, no presente momento da engenharia tem sido uma prática comum à utilização dos
três métodos em conjunto. Assim, resultados experimentais e metodologias analíticas
encontradas na literatura são utilizados para pré-validar metodologias numéricas. A
metodologia pré-validada é então utilizada na solução do problema e, finalmente, esta solução
é confrontada com novos resultados experimentais. Este processo economiza tempo e custo já
que é apenas necessário realizar um conjunto otimizado de experimentos. Além disto, o uso
de um método numérico permite verificar uma larga gama de hipóteses de solução antes de
definir a solução a ser adotada.
Em muitos problemas de engenharia, abordagens puramente analíticas de situações ou
geometrias reais não são possíveis. Nestes casos, geometrias e/ou condições similares devem
ser usadas na validação do modelo numérico. De qualquer forma, o modelo numérico deve ser
validado para que haja confiança nos resultados. Em geral, existe ainda muita resistência com
relação a resultados numéricos não-validados.
Em áreas como a aeronáutica e indústrias com grande pressão de mercado, métodos
numéricos são usados no dia-a-dia com grande confiabilidade e, muitas vezes, a etapa de
validação através de experimentos é contornada, fazendo com que componentes

10
desenvolvidos por meio de métodos numéricos passem direto do computador para a linha de
produção.
Isto é uma realidade ainda distante para a maior parte das áreas da engenharia, especialmente
na área nuclear onde o licenciamento de reatores passa por verificação cuidadosa e
extremamente rigorosa, e uma validação experimental é quase sempre requerida. Mas, como
será mostrado na seção seguinte, em um levantamento das publicações cientificas recentes é
possível observar que a solução de problemas por método numérico é cada vez mais aplicada.
Isto ressalta a necessidade de se estudar e compreender bem este método e sua utilização.
A geometria do BP (Bocal inferior Padrão) apresenta duas regiões características: a placa
perfurada e o direcionador de fluxo. Para melhor analisar o BP, estas duas geometrias serão
estudadas separadamente nas primeiras etapas do trabalho. A revisão da literatura e a maior
parcela deste trabalho serão dedicadas à placa perfurada, por ser a componente mais crítica do
BP, responsável por aproximadamente 70% da perda de carga imposta à água no BP do
elemento combustível.
A seguir, é apresentada uma revisão da literatura sobre o método analítico Idelchik (1966 e
1986) usado no cálculo da perda de carga em placas perfuradas, sobre CFD e sobre os
trabalhos pertinentes desenvolvidos na última década.
2.2. Método analítico Idelchik (1960 e 1986)
Uma placa uniformemente perfurada, posicionada em uma seção transversal de um canal
(Figura 2.1), gera uma resistência à passagem de fluido. Quando a corrente fluida atinge a
placa, ela contrai-se para passar pelos orifícios e abandona a placa em jatos separados de
fluido em alta velocidade, gerando perdas de pressão tanto no momento da entrada nos
orifícios como na expansão repentina na sua saída. A perda total de pressão de um fluido
escoando em um canal com uma placa perfurada pode ser definida por:
atritoplacatotal ppp Δ+Δ=Δ (2.1)

11
onde placapΔ representa a perda de carga na placa perfurada devido ao atrito e às variações na
área de escoamento e atritopΔ representa a perda por atrito no canal.
Figura 2.1 – Vista isométrica de uma placa perfurada em um canal.
A perda de carga por atrito em um duto reto pode ser obtida pela relação:
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛=Δ
2
2z
hatrito
VD
Lp ρλ (2.2)
onde L e hD são, respectivamente, o comprimento e o diâmetro hidráulico do canal de
escoamento, zV é a velocidade média do escoamento no canal no sentido do eixo de
coordenadas z, ρ a massa específica do fluido e λ é o coeficiente de atrito da superfície do
canal que pode ser determinado, em termos do número de Reynolds e da rugosidade (e),
através da equação de Colebrook (Fox e McDonald, 1998):
⎟⎠
⎞⎜⎝
⎛ +−= 5,05,0 Re51,2
7,3log0,21
λλhDe
(2.3)
A perda de carga na placa perfurada pode ser obtida pela relação dada na Equação 2.4
Voz
V z passo
doz
Voz
V z passo
oz
d

12
2
2z
placaVKp ρ
=Δ (2.4)
onde K é o coeficiente de resistência para a placa perfurada.
Em seu Handbook of Hydraulic Resistance, Idelchik (1960) apresenta um conjunto de
equações semi-empíricas para o coeficiente K de placas perfuradas:
( ) ( ) ( ) 225,1 1115,0 fdlfffKh
⎥⎦
⎤⎢⎣
⎡+−+−+−= λτ (2.5)
( ) )(104,2 lxl ϕτ −−= (2.6)
( )78 05,0535,025,0)( lll ++=ϕ (2.7)
hdll = (2.8)
Onde l é a espessura da placa perfurada, hd é o diâmetro hidráulico do orifício da placa e f o
coeficiente de área livre, ou razão de perfuração, definido como sendo a relação entre a área
livre do escoamento na placa (soma das áreas dos orifícios) e a área total do canal de
escoamento. λ da placa perfurada também é definido pela Equação 2.3 considerando o
escoamento através dos orifícios. As equações semi-empíricas apresentadas só são válidas
para escoamentos com número de Reynolds nos orifícios maior que 105 e placas perfuradas
com a relação hdl maior que 0,015.
Para um escoamento com número de Reynolds menor que 105 nos orifícios, o coeficiente de
resistência pode ser obtido através da Equação 2.9, onde os valores para ϕξ e Re0ε são
tabelados no Handbook (Idelchik, 1966) e reproduzidos no Anexo I.

13
( ) ( ) ( )[ ] 225,1Re0 1115,0 f
dlfffKh ⎭
⎬⎫
⎩⎨⎧
+−+−+−+= λτεξϕ (2.9)
Uma formulação alternativa para a perda de carga de um escoamento através de uma placa
perfurada com Reynolds no orifício maior que 105 é apresentada na última edição do
Handbook de Idelchik (1986), como segue:
( ) ( ) ( ) 22375,175,0 1115,0 fdlfffKh
⎥⎦
⎤⎢⎣
⎡+−+−+−= λτ (2.10)
Esta fórmula traz alterações nos coeficientes da equação que não são justificadas no
Handbook de 1986 e tem gerado grande desconfiança na sua utilização uma vez que algumas
das equações dessa edição mais recente apresentaram erros graves, corrigidos posteriormente
através de erratas. Tentativas de comunicação com a editora para esclarecimentos sobre as
alterações na formulação apresentada no Handbook de Idelchik (1986) não obtiveram
sucesso.
2.3. A mecânica dos fluidos computacional
A mecânica dos fluidos computacional ou simplesmente CFD (Computational Fluid
Dynamics) é a análise de sistemas envolvendo escoamento de fluido, transferência de calor e
fenômenos associados como reações químicas, combustão e mudança de fase, por meio de
simulações baseadas em computador. O método trabalha resolvendo as equações de transporte
de massa, energia e quantidade de movimento por meio de um processo numérico. A Figura
2.2 exemplifica a tarefa inicial do método numérico, que é discretizar o domínio em um
número de subdomínios não coincidentes formando uma malha de pequenos elementos (ou
volumes de controle) para os quais uma solução discreta deve ser obtida. Para isso, deve-se
também transformar as equações diferenciais de transporte, definidas de forma contínua no
domínio, em um sistema de equações algébricas para o domínio discretizado (Maliska, 1995).

14
.
Figura 2.2 – A tarefa inicial do método numérico: discretizar o domínio contínuo (Fonte:
Maliska, 1995).
A metodologia CFD, inicialmente muito utilizada na indústria aeroespacial, vem mais
recentemente sendo aplicada na área automobilística, naval e nuclear. A disponibilidade de
computadores de alto desempenho e baixo custo juntamente com o surgimento de programas
de CFD com interfaces amigáveis levou a um grande crescimento do uso desta técnica a partir
dos anos 90. Além disso, a versatilidade e generalidade dos métodos numéricos para a
simulação de problemas de engenharia, e a relativa simplicidade de aplicação dessas técnicas,
são outros fatores motivadores para a intensificação do seu uso.
Atualmente, sofisticados programas comerciais de CFD, como o CFX (ANSYS CFX 10.0,
2005), podem ser executados em computadores pessoais no ambiente de trabalho e até em
casa, tornando cada vez mais fácil, tanto no meio acadêmico-científico como no industrial, o
uso de técnicas numéricas para a solução de problemas de engenharia, uma vez que os custos
para a aquisição dos equipamentos necessários são cada vez menores.
Os códigos CFD são, de maneira geral, estruturados em quatro elementos principais: (i) um
gerador de geometria e de malha, (ii) um pré-processador, (iii) um “solucionador” (solver) e
(iv) um pós-processador.
(i) Gerador de geometria e malha – consiste da inserção do problema no código CFD. As
informações inseridas envolvem:
• Definição da geometria e domínio de solução – Este passo pode ser realizado em um
programa secundário CAD (Computer Assisted Drawing – Desenho auxiliado por

15
computador) como SOLIDWORKS e depois importado pelo código CFD, operação
comumente realizada quando se trabalha com o CFX.
• Geração da malha – Consiste na discretização do domínio contínuo em uma malha de
elementos discretos.
Aproximadamente 50% do tempo gasto em um projeto CFD é dedicado à definição da
geometria e à geração da malha (Versteeg e Malalasekera, 1995). No CFX, o módulo
DESIGNMODELER é usado para gerar ou importar a geometria e o CFX-MESH é usado para
gerar a malha.
(ii) Pré-processador – este módulo define as condições físicas do problema. No CFX o pré-
processamento é feito no módulo CFX-PRE. As informações inseridas envolvem:
• Seleção do fenômeno físico e/ou químico a ser modelado – definição do modelo de
turbulência, transferência de calor, combustão, etc., a serem utilizados.
• Definição das características do fluido – condições iniciais de escoamento e propriedades
do fluido.
• Especificação das condições de contorno do domínio de solução.
(iii) “Solucionador” – Soluciona o problema CFD através de um método numérico. Os
métodos numéricos tradicionais para a solução de equações diferenciais são os métodos de
diferenças finitas (MDF), de volumes finitos (MVF) e de elementos finitos (MEF).
O CFX usa o MVF para solucionar as equações diferenciais. O modulo CFX-SOLVER
MANAGER é responsável pela solução iterativa do sistema de equações algébricas resultantes.
(iv) Pós-processador – Permite apresentar qualitativamente e quantitativamente os resultados
obtidos na simulação, através de funções de visualização, de gráficos e tabelas de dados. No
CFX o modulo CFX-POST é usado no pós-processamento.

16
Nas seções seguintes são apresentados detalhes relativos às teorias que envolvem os códigos
CFD tratando das: leis de conservação, equações mediadas, modelos de turbulência,
condições de contorno, MVF e malhas.
2.3.1. Equações fundamentais
As equações governantes da mecânica dos fluidos e transferência de calor são solucionadas
em um cálculo CFD (Tannehill et al., 1997). As equações aqui apresentadas foram
simplificadas pelas hipóteses de escoamento isotérmico e incompressível, condições aplicadas
ao presente estudo. Devido a estas hipóteses a equação fundamental da energia é omitida.
Aplicando a lei da conservação de massa a um escoamento resulta na equação da
continuidade, Equação 2.11, apresentada na notação tensorial compacta.
0=∂
∂
j
j
xu
(2.11)
Aplicando a segunda lei de Newton a um escoamento incompressível resulta na equação
vetorial de Navier-Stokes de transporte de quantidade de movimento.
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
∂∂
+∂∂
−=∂∂
+∂
∂
i
j
j
i
jiji
j
ixu
xu
xxpuu
xtu
μρρ (2.12)
O divergente no lado esquerdo da igualdade da Equação 2.12 representa os efeitos advectivos,
não-lineares no escoamento, enquanto que o divergente do lado direito representa os efeitos
difusivos.
Existem quatro incógnitas (u, v, w, p) nas quatro equações acima quando se considera um
escoamento incompressível com propriedades constantes o que torna o sistema fechado.
Apesar disto, a solução das equações fundamentais não é uma tarefa simples. Até hoje não há
uma solução analítica para as equações de Navier-Stokes e uma solução numérica direta (DNS

17
– Direct Numerical Simulation) das equações exige a discretização do domínio de solução em
elementos com dimensões compatíveis com as estruturas de turbulência presentes no
escoamento.
2.3.2. Turbulência e as equações mediadas
Turbulência em um fluido se refere a um movimento tridimensional, transiente de partículas
de uma maneira praticamente caótica. Aparece no campo de escoamento como um processo
aleatório, completamente imprevisível. A aleatoriedade está presente não somente na
flutuação da velocidade e pressão, mas também em outras variáveis escalares como a
temperatura e a concentração de espécies que podem estar presentes no fluido. Isto é um
grande contraste com o regime laminar, onde o escoamento é normalmente uniforme e bem
comportado. A turbulência muitas vezes se origina como uma instabilidade de um escoamento
laminar quando o número de Reynolds cresce. As instabilidades podem ser entendidas como
uma interação de termos viscosos com termos não-lineares de inércia nas equações de
movimento. Estas interações são muito complexas e combinam aleatoriedade com não-
linearidade tornando a tarefa de modelar a turbulência muito difícil (Silveira Neto, 2003).
Um escoamento turbulento é um fenômeno que pode ser caracterizado como contínuo,
irregular, difusivo, dissipativo, tridimensional, rotacional e imprevisível que só ocorre para
números de Reynolds maiores que 1. Outra característica importante é a multiplicidade de
escalas das estruturas turbulentas, composta por uma banda larga de estruturas que interagem
de forma não-linear e originam um espectro, que pode ser verificado em escoamentos
turbulentos através do espectro da energia cinética turbulenta, E(k), em função do número de
onda, k, como mostrado na Figura 2.3.

18
Figura 2.3 – Espectro de energia cinética turbulenta (Fonte: Silveira Neto, 2003).
As estruturas turbulentas presentes na zona inercial do espectro são caracterizadas como
anisotrópicas, de baixas freqüências e têm predominância de efeitos inerciais não-dissipativos,
com a maior estrutura limitada pela geometria do domínio de escoamento. As estruturas
menores apresentam o maior número de onda e têm predominância de efeitos viscosos, sendo
responsáveis pela dissipação viscosa que transforma a energia cinética turbulenta em energia
térmica. O comprimento característico (η) da menor escala presente em um escoamento
turbulento foi definida por Kolmogorov como sendo (Silveira Neto, 2003):
4/3ReL
L=η (2.13)
Onde L é o comprimento da maior escala turbulenta, equivalente à dimensão característica do
domínio de escoamento.
À medida que o número de Reynolds aumenta, o espectro de escalas da turbulência se torna
mais largo. Como a maior estrutura presente em um escoamento turbulento é limitada pela
geometria, o aumento do espectro turbulento provoca o surgimento de escalas cada vez
menores, como pode ser deduzido pela Equação 2.13.
Para obter numericamente as menores escalas da turbulência sem modelagem da turbulência,
em um cálculo DNS é necessário que o domínio de solução seja discretizado em elementos

19
que apresentem no máximo o comprimento desta escala, tarefa que se torna impraticável para
escoamentos com altos números de Reynolds, os mais freqüentes na prática.
Uma abordagem usada para solucionar problemas com número de Reynolds elevados é a
aplicação de filtros para a turbulência nas equações de Navier-Stokes. Duas formas de filtros
são usadas: filtro espacial e filtro temporal.
No filtro espacial as maiores escalas da turbulência são resolvidas diretamente e às escalas
menores, que apresentam escala menor ou igual ao comprimento característico da malha, são
filtradas e modeladas. Este tipo de abordagem é conhecido como simulação de grandes
escalas (LES – Large-Eddy Simulation) e é obtida através da filtragem das equações de
Navier-Stokes através de uma mediação espacial sobre uma região de comprimento igual ao
tamanho do volume de controle computacional. O esforço computacional para uma LES é em
geral dez vezes menor do que para uma DNS. Apesar disto, continua sendo uma abordagem
com um custo computacional muito elevado para geometrias complexas, além de necessitar
de um refinamento temporal muito elevado. Na prática, quando um domínio é discretizado em
elementos menores já está se aplicando um filtro espacial. Assim em CFD um filtro espacial é
sempre aplicado
No filtro temporal, nenhuma escala da turbulência é resolvida e o seu efeito é computado no
escoamento através de modelagem. Esta abordagem permite o uso de malhas com elementos
muitas vezes maiores do que os usados nas abordagens LES e DNS. Este método só representa
o comportamento médio do escoamento ocultando a maioria das oscilações e instabilidades
presentes. Apesar da simplicidade, em casos de geometrias complexas onde LES e DNS têm
um custo computacional muito elevado, esta abordagem é muito usada. Esta abordagem é
obtida através da mediação das equações de Navier-Stokes no tempo que resultam nas
equações de Navier-Stokes mediadas por Reynolds (RANS – Reynolds Averaged Navier-
Stokes). Em um tratamento numérico
No presente trabalho, somente a abordagem com filtro temporal foi explorada devido à
complexidade geométrica e altos números de Reynolds presentes no escoamento através do
BP.

20
2.3.3. Equações de Navier-Stokes mediadas por Reynolds
Quando se mede a velocidade em um ponto de um escoamento turbulento, usando uma taxa
de aquisição de dados maior que a das flutuações de velocidade, percebe-se que o escoamento
pode ser simplificado por uma componente média e uma componente flutuante dependente do
tempo, como pode ser observado na Figura 2.4.
Figura 2.4 – Medida pontual típica de velocidade em um escoamento turbulento.
Em um escoamento turbulento todas as variáveis, φ , podem ser representadas como uma
soma de uma componente média, φ , e uma componente variável no tempo, φ′ , como
mostrado na Equação 2.14.
φφφ ′+= (2.14)
Uma mediação no tempo pode ser feita como mostrado na Equação 2.15.
∫Δ+
Δ=
tt
t
dtt
φφ 1 (2.15)
onde Δt é uma escala de tempo relativamente maior que as flutuações turbulentas, mas
relativamente pequena em relação à escala de tempo global do escoamento. Substituindo a
Equação 2.14 nas equações fundamentais para um escoamento incompressível com
propriedades constantes, e realizando a mediação destas equações, resulta nas RANS 2.16 e
2.17 (Tannehill et al., 1997).

21
0=∂
∂
j
j
xu
(2.16)
( ) ( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
′′−⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
∂∂
+∂∂
−=∂∂
+∂
∂ji
i
j
j
i
jiji
j
i uuxu
xu
xxpuu
xtu
ρμρρ (2.17)
A Equação 2.16 da continuidade tem a mesma forma da Equação 2.11, mas a Equação 2.17
do momentum contém novos termos de tensões com produtos não-lineares das quantidades
flutuantes. Estas tensões de Reynolds, ρ jiuu ′′ , surgem do termo advectivo das equações
mediadas e devem ser vistas como incógnitas. Assim, para solucionar esse sistema de
equações é necessário encontrar equações adicionais envolvendo as novas incógnitas ou fazer
hipóteses com respeito à relação entre as novas quantidades turbulentas e as médias temporais
das variáveis do escoamento. Este problema de fechamento é comumente resolvido por
modelagem.
Para que tenhamos um número de equações igual ao número de variáveis para as RANS são
necessárias equações de transporte auxiliares que são obtidas das próprias equações de
Navier-Stokes. Os modelos de turbulência são classificados pelo número de equações de
transporte adicionais necessárias para a solução e pela hipótese teórica usada para a
modelagem das tensões.
Duas hipóteses largamente aplicadas na modelagem da turbulência são a da viscosidade
turbulenta e a das tensões de Reynolds. A hipótese da viscosidade turbulenta estabelece uma
analogia entre as tensões viscosas turbulentas e as moleculares. A hipótese das tensões de
Reynolds usa seis ou mais equações de transporte que descrevem as componentes do tensor
de tensões de Reynolds individualmente e uma equação de transporte auxiliar para fechar o
conjunto de equações. Os modelos das tensões de Reynolds têm custo computacional elevado,
já que apresentam um número grande de equações diferenciais adicionais, mas permitem
computar a anisotropia da turbulência que pode ser muito importante em certos escoamentos,
como por exemplo, em simulações de combustão e mistura de componentes. Na prática, para
a maioria dos escoamentos industriais não há grande vantagem em se usar modelos de tensão

22
de Reynolds, pois os benefícios observados são muito pequenos comparados ao acréscimo no
custo computacional (ANSYS CFX 10.0, 2005). Devido ao custo computacional da simulação
do BP apenas os modelos de viscosidade turbulenta são abordados neste trabalho.
2.3.4. Modelos de viscosidade turbulenta
Uma característica importante do escoamento turbulento é que as flutuações de velocidade
influenciam o progresso do escoamento médio, fazendo com que ele exiba aparentemente um
aumento da resistência à deformação. Em outras palavras, o movimento flutuante age sobre o
movimento médio de tal forma que a viscosidade aparentemente aumenta. Isto é o
fundamento teórico central no desenvolvimento de um grande número de modelos de
turbulência conhecidos como modelos de viscosidade turbulenta ou modelos de primeira
ordem (Schlichting e Gersten, 2003).
Os modelos de viscosidade turbulenta se baseiam na hipótese de que há uma analogia entre as
tensões viscosas moleculares e as tensões de Reynolds no escoamento médio. Boussinesq
(1877) propôs que as tensões de Reynolds poderiam ser associadas à taxa de deformação
média de um elemento fluido supondo uma turbulência isotrópica, ou seja, uma invariância
estatística das propriedades do escoamento em relação a uma rotação no sistema de eixos.
Desta hipótese, foi obtida a Equação 2.18.
kxu
xu
uu iji
j
j
itji ρδμρ
32
−⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
=′′− (2.18)
onde ijδ é a função delta de Kronecker que é igual a um para ji = e igual à zero para ji ≠ ,
2iiuuk ′′= é a energia cinética turbulenta e tμ é a viscosidade turbulenta.
O lado direito da Equação 2.18 se diferencia das tensões viscosas moleculares (Eq. 2.17) pela
presença do termo da energia cinética turbulenta e a substituição da viscosidade molecular
pela viscosidade turbulenta. Utilizando esta hipótese, as tensões de Reynolds são reduzidas à

23
viscosidade turbulenta e à energia cinética turbulenta, as quais devem ser modeladas. Por
analogia com a teoria cinética dos gases, a viscosidade turbulenta pode ser modelada através
da Equação 2.19.
lvtt ρμ = (2.19)
onde tv e l são, respectivamente, as escalas características da velocidade e do comprimento
da turbulência a serem modeladas.
É importante enfatizar que, quando se resolve as equações modeladas da turbulência, a
pressão passa a ser constituída pela pressão termodinâmica mais a tensão normal turbulenta:
kpp ijt ρδ32
+= (2.20)
Para recuperar o verdadeiro campo de pressão torna-se necessário modelar também a energia
cinética turbulenta.
A modelagem matemática da viscosidade turbulenta é algo que desafia pesquisadores por
várias décadas. Existe uma larga gama de modelos de viscosidade turbulenta que são
classificados pelo número de equações diferenciais usados, podendo variar de zero a duas
equações. Os modelos de duas equações apresentam maior generalidade sendo assim os mais
usados na prática de CFD. Apesar disto, cada modelo apresenta um número grande de
características próprias o que dificulta a escolha do modelo mais apropriado para cada
geometria. A seguir são apresentados os modelos de duas equações utilizados neste trabalho.
Modelo k-ε
O modelo de turbulência k-ε é o mais popular modelo de duas equações, proporcionando uma
boa relação entre esforço computacional e precisão. Muitos autores contribuíram para o
desenvolvimento deste modelo, no entanto as referências centrais para o modelo são os
trabalhos de Jones e Launder (1972) e Launder e Spalding (1974). Este modelo também é

24
conhecido por k-ε padrão. Neste modelo, as escalas características da viscosidade turbulenta
são modeladas através da energia cinética turbulenta, k , e da dissipação turbulenta, ε, usando
as relações ε23kCl l= e 21kCvtvt = obtendo a seguinte relação:
ερμ μ
2kCt = (2.21)
Onde μC é uma constante e ε é definido como a taxa de dissipação viscosa da energia
cinética turbulenta. As equações de transporte deduzidas das equações de Navier-Stokes para
k e ε são:
( ) ( ) ρεσμ
μρρ−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂
∂k
jk
t
jj
jP
xk
xku
xtk (2.22)
( ) ( )k
CPk
Cxx
uxt k
j
t
jj
j
2
21ερεε
σμ
μερρεεε
ε−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂
∂ (2.23)
onde kσ , εσ , 1εC e 2εC são constantes fornecidas na Tabela II.1 e kP é a produção da
turbulência devido às forças viscosas definida por:
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
∂∂
= kxu
xu
xP ij
i
j
j
it
jk ρδμ
32 (2.24)
Tabela II.1 – Constantes do modelo de turbulência k-ε.
μC 1εC 2εC kσ εσ
0,09 1,44 1,92 1 1,3

25
Modelo k-ω
Proposto por Kolmogorov (1942), vários autores contribuíram para o desenvolvimento do
modelo k-ω, sendo que o CFX usa a versão apresentada por Wilcox (1994). A hipótese central
do modelo é a necessidade de uma equação de transporte para computar a taxa de dissipação
turbulenta especifica, ω, assim como uma outra para calcular a energia cinética turbulenta e
modelar a viscosidade turbulenta. Baseado nesta hipótese, foi proposto que as escalas
características da viscosidade turbulenta podem ser obtidas usando as relações ω21kl = e
21kvt = obtendo a seguinte relação:
ωρμ k
t = (2.25)
As equações de transporte que caracterizam este modelo são, conforme apresentado por
Wilcox (1994), as seguintes:
( ) ( ) ( )ωρβσμ
μρρ kPxk
xku
xtk
kjk
t
jj
j′−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂
∂ (2.26)
( ) ( ) ⎟⎠⎞
⎜⎝⎛ −+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂
∂ 2βρωωαωσμ
μωρρω
ωk
j
t
jj
jP
kxxu
xt (2.27)
Pk é a taxa de produção da turbulência, que é calculada como no modelo do k-ε pela Equação
2.24. Os valores das constantes são fornecidos na Tabela II.2.
Tabela II.2 – Constantes do modelo turbulento k-ω.
α β ′ β kσ ωσ
0,55556 0,09 0,075 1 2

26
Uma das vantagens da formulação k-ω é o tratamento próximo a superfícies usando o método
de baixo número de Reynolds. O modelo não envolve as funções complexas não-lineares
requeridas para os modelos k-ε e é consequentemente mais exato e mais robusto. Um modelo
k-ε de baixo Reynolds exigiria tipicamente uma malha próxima de parede muito refinada,
enquanto um modelo k-ω requer um refinamento dez vezes menor (Vieser et al., 2002).
Modelo SST (Shear Stress Transport)
O principal problema do modelo k-ω é uma forte sensibilidade da solução para valores de ω
fora da camada limite (Menter, 1992). A fim de resolver este problema, uma combinação do
modelo k-ω próximo à superfície e do modelo k-ε na região afastada foi proposto, levando ao
desenvolvimento por Menter (1992) do modelo SST (Shear-Stress Transport – Transporte de
tensão cisalhante). O modelo SST consiste em uma transformação do modelo k-ε para uma
formulação k-ω e uma subseqüente adição das equações correspondentes. O modelo k-ω é
multiplicado desse modo por uma função acopladora F1 e o modelo transformado k-ε por uma
função 1-F1. F1 se torna igual à unidade perto da superfície e a zero fora da camada limite.
Assim na camada limite o modelo k-ω é usado e, na borda e fora da camada limite, o modelo
k-ε padrão é usado. Após manipulação matemática, as equações finais do modelo para k e ω
são:
( ) ( ) ( )ωρβσμ
μρρ kPxk
xku
xtk
kjk
t
jj
j′−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂
∂
3 (2.28)
( ) ( ) ( ) 2331
23
21 ρωβωαωωσ
ρωσμ
μωρρω
ωω−+
∂∂
∂∂
−+⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂∂
=∂∂
+∂
∂k
jjj
t
jj
jP
kxxkF
xxu
xt
(2.29)
As constantes do modelo SST são uma combinação linear das constantes correspondentes aos
modelos k-ε e k-ω, obtidas através da relação apresentada na Equação 2.30.

27
( ) 21113 1 Φ−+Φ=Φ FF (2.30)
Sendo Φ1 as constantes do modelo k-ω e Φ2 as constantes do modelo k-ε.
As funções de acoplamento são críticas para o sucesso do método. Sua formulação é baseada
na distância entre o ponto analisado e a superfície mais próxima e nas variáveis do
escoamento. A função acopladora F1 é dada por:
( )411 argtanh=F (2.31)
sendo
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛
′= 2
221
4,500,argyCD
ky
vy
kMÁXIMOMINIMOk ωωσ
ρωωβ
(2.32)
e
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
∂∂
= −10
210,12
jjk xx
kMÁXIMOCD ωωσ
ρω
ω (2.33)
y é a distancia do ponto avaliado para a parede mais próxima e v é a viscosidade cinemática.
A principal característica do modelo SST é a presença de um limite superior para a tensão
cisalhante turbulenta na camada limite. Isto evita níveis excessivos de tensão cisalhante,
problema presente em outros modelos baseados na hipótese de viscosidade turbulenta. A
viscosidade turbulenta é então definida como:
( )21
1, SFaMÁXIMO
kat ω
ρμ = (2.34)
Onde 1a é uma constante com valor típico de 0,31 e S é o tensor de tensões médias absoluto,
definido pelas equações 2.35 e 2.36.

28
ijij SSS = (2.35)
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
=i
j
j
iij x
uxu
S21 (2.36)
F2 é uma função, que restringe as tensões cisalhantes turbulentas na camada limite definida
por:
( )222 argtanh=F (2.37)
sendo
⎟⎟⎠
⎞⎜⎜⎝
⎛
′=
ωωβ 22500,2argy
vy
kMÁXIMO (2.38)
Um fenômeno importante é a separação do escoamento da superfície quando sujeito a um
gradiente de pressão adverso. A separação tem grande efeito na turbulência próxima de
parede. O modelo SST leva em consideração o transporte das tensões turbulentas e fornece
boas predições do início e da quantidade de separação do fluxo sob gradientes adversos de
pressão, fato demonstrado por Bardina et al. (1997) para vários casos.
2.3.5. Formulação do escoamento próximo à parede
A camada de fluido de um escoamento que entra em contato direto com uma parede
(superfície sólida) adquire a velocidade da parede devido à condição de não-deslizamento.
Analisando o escoamento na direção normal à superfície, observa-se que a influência da
superfície no escoamento diminui com o afastamento dela. A região compreendida entre a
parede e a transição para o núcleo do escoamento, onde o escoamento não é mais
influenciado, é chamada de camada limite hidrodinâmica. Para um escoamento turbulento
uma solução analítica exata não é possível. Os escoamentos turbulentos estão amplamente
presentes na indústria e o entendimento da camada limite nestes escoamentos tem sido objeto

29
de estudo até o presente. A camada limite turbulenta pode ser dividida em três regiões
distintas, como mostrado no perfil de velocidade da Figura 2.5.
Subcamada logarítmica
Subcamada amortecedora
Subcamada viscosa
yΔ
∞u
Subcamada logarítmica
Subcamada amortecedora
Subcamada viscosa
yΔ
∞u
Figura 2.5 – Escoamento próximo a uma superfície sólida (Fonte: ANSYS CFX 10.0, 2005).
Na subcamada viscosa ou linear, os efeitos viscosos, dissipativos, são dominantes e as
velocidades são baixas, o que resulta em um perfil de velocidades linear. Na subcamada
amortecedora os efeitos inerciais, difusivos, têm papel significativo juntamente com os efeitos
viscosos. Na subcamada logarítmica, o escoamento apresenta a ordem de grandeza do
escoamento médio, caracterizando uma predominância dos efeitos inérciais sobre os viscosos
e apresentando um perfil de velocidade aproximadamente logarítmico.
Uma definição muito importante para a modelagem de um escoamento próximo de parede é o
da distância adimensional de parede, +y , definida como
μρ τyu
y =+ (2.39)
onde y é a distância do ponto avaliado à superfície e τu é a velocidade de atrito definida por
2/1
⎟⎟⎠
⎞⎜⎜⎝
⎛=
ρτω
τu (2.40)
sendo τω a tensão de cisalhamento na superfície.

30
Observou-se através de experimentos que as regiões da camada limite turbulenta se
mantinham restritas a certas faixas de +y : a subcamada viscosa em 750 −≤≤ +y , a
subcamada amortecedora em 3075 ≤≤− +y e a subcamada logarítmica em 30>+y (Fox e
McDonald, 1998).
O perfil de velocidade adimensional na subcamada viscosa é linear definido como ++ == yuuu i τ , e na subcamada logarítmica é definido por (Fox e McDonald, 1998):
( ) Cyu += ++ log1κ
(2.41)
Onde κ é a constante de Von Kármán igual a 0,41 e C é uma constante igual a 5,2.
Fazendo a igualdade entre os dois perfis é encontrado o valor de +y igual a 11,067, que
representa a interseção entre os perfis. Este valor é usado na modelagem de escoamentos
próximos às superfícies para definir os limites de cada região, excluindo da modelagem a
região amortecedora que é complexa e pouco significativa para as quantidades médias. É
definido que, para 067,11≤+y , o fluido está na subcamada viscosa com o perfil de
velocidades linear e que, para 067,11>+y , o fluido está na subcamada logarítmica com um
perfil de velocidade logarítmico (Versteeg e Malalasekera, 1995).
O limite superior para y+ é uma função do número de Reynolds do escoamento. É possível
estimar a espessura da camada limite, δ , usando a Equação 2.42, onde ∞u é a velocidade
paralela à superfície fora da camada limite. Esta relação é útil para avaliar a malha próxima de
uma superfície.
∞=
uLνδ 7/6Re14,0 (2.42)

31
onde νLuL ∞=Re e L é o comprimento característico hidrodinâmico da geometria.
A modelagem numérica de escoamentos de camada limite turbulenta é um tema que desafia
pesquisadores há décadas, mostrando ser um dos problemas mais complexos de ser simulados
numericamente devido aos grandes gradientes e às pequenas estruturas turbulentas presentes
nesse tipo de escoamento. As experiências e análises matemáticas mostraram que é possível
modelar as subcamadas sem que haja muita perda de qualidade em uma simulação. Duas
aproximações são geralmente usadas para modelar o escoamento próximo a superfícies:
• O método de baixo número de Reynolds - resolve os detalhes da camada limite sem o
uso de uma formulação algébrica. Note que o método de Baixo Número de Reynolds não
se refere ao número de Reynolds de escoamento, mas ao número turbulento de Reynolds,
que é baixo na subcamada viscosa. Este método pode consequentemente, ser usado em
simulações de escoamentos com números de Reynolds elevados.
• O método da função de parede - usa fórmulas algébricas empíricas para os perfis de
velocidade junto à parede ao invés de resolver as equações diferenciais para a subcamada
laminar.
O método da função de parede é o modo mais utilizado na avaliação dos efeitos da camada
limite. A principal vantagem é que a camada limite pode ser simulada usando uma malha
relativamente grosseira, rendendo uma economia computacional substancial sem grande
comprometimento do resultado da simulação. A seguir são apresentadas as formulações de
parede usadas no CFX.
Função de parede escalável
O método da função de parede escalável (Scalable) é uma extensão do método de Launder e
Spalding (1974). Para 067,11>+y , a velocidade tangencial próxima à superfície é
relacionada à tensão de cisalhamento na superfície, τω, por meio de uma relação logarítmica,
Equação 2.41. Esta equação apresenta uma singularidade em pontos de separação onde a

32
velocidade adimensional próxima de parede, +u , tende a zero. Uma escala alternativa de
velocidade adimensional, *u , é usada ao invés de +u , dada por (ANSYS CFX 10.0, 2005):
2/14/1* kCu μ= (2.43)
Esta escala tem a propriedade de não tender a zero se a velocidade de ponto de separação vai
à zero, porque a energia cinética turbulenta nestes pontos nunca é completamente zero.
Baseado nesta definição, as seguintes equações podem ser obtidas.
( ) Cy
uu y
+=
+
Δ
log1κ
τ (2.44)
( ) μρ /* yuy =+ (2.45)
τω ρτ uu *= (2.46)
Onde yuΔ é a velocidade paralela à superfície afastada de uma distância Δy.
Para evitar que 067,11≤+y ocorram no primeiro elemento fora da parede é aplicado um
limitador para o valor de +y definido como:
( )067,11;~ ++ = yMÁXIMOy (2.47)
O uso deste limitador reduz erros provenientes de uma malha arbitrariamente refinada
próxima de parede que colocariam pontos de malha dentro da subcamada viscosa (Grotjans e
Menter, 1998). A interpretação física do limitador é que, para malhas refinadas, a parede é
tratada como se fosse o limite da subcamada viscosa.

33
Para tornar a formulação mais conservativa no CFX, o valor de +y calculado para o domínio
é dividido por um fator de 4 e então comparado ao valor do limitador. Desta forma qualquer
primeiro elemento fora da parede que apresentar +y menor que 44,268 será enquadrado no
critério do limitador e tratado como se tivesse um +y igual a 11,067 (ANSYS CFX 10.0,
2005).
No CFX, os modelos de turbulência baseados na dissipação turbulenta, ε, usam esta
abordagem. Os valores dos parâmetros de malha recomendados para a aplicação deste método
são: para o primeiro nó fora da parede 10020 ≤≤ +y e dez nós ao longo da espessura da
camada limite (Vieser et al., 2002).
Função de parede automática
Se por um lado a função de parede escalável permite refinamentos de malha arbitrários, por
outro ela é baseada em uma hipótese física que é problemática, a omissão da subcamada
viscosa. Especialmente para escoamentos com baixos números de Reynolds, isto pode causar
erros de 10% ou mais na vazão em massa do escoamento em um duto, devido à influência
relativamente alta da porção viscosa da camada limite (Vieser et al., 2002).
É desejável dispor de uma formulação robusta e precisa para a subcamada viscosa, permitindo
que o cálculo seja feito até a superfície. Uma formulação usando o método de baixo número
de Reynolds, para modelos de turbulência que se baseiam em ω, permite o uso de uma malha
próxima à superfície dez vezes mais grosseira do que o necessário para modelos baseados em
ε. Mas mesmo estas malhas mais grosseiras podem ser impraticáveis na simulação de
escoamentos industriais complexos, como o escoamento em um elemento combustível
nuclear, tornando, em muitos casos, necessário o uso de uma formulação baseada em função
de parede.
A formulação de função de parede automática usa uma modelagem da turbulência baseada em
ω para obter uma expressão analítica para a subcamada viscosa. Esta expressão permite que

34
as subcamadas viscosa e logarítmica sejam modeladas. As relações usadas no método são
(Vieser et al., 2002):
+=
yu
lνκ
ω τ2
3,01 (2.48)
( )22
075,0
6+
=y
uv
νω τ (2.49)
onde lω é a taxa de dissipação turbulenta especifica para a subcamada logarítmica e vω é a
taxa de dissipação turbulenta especifica para a subcamada viscosa. Para obter um
acoplamento suave entre a subcamada viscosa e a logarítmica faz-se:
22lv ωωω += (2.50)
Uma formulação similar pode ser obtida para o perfil de velocidades nas subcamadas viscosa
e logarítmica:
+Δ=
y
uu y
vτ (2.51)
( ) Cyk
uu y
l+
=+
Δ
log1τ (2.52)
4 44lv uuu τττ += (2.53)
Está formulação fornece uma relação entre a velocidade no primeiro elemento fora da parede
e a tensão de cisalhamento na parede. Para a equação de k a condição de contorno de fluxo
zero é aplicada como é valida para as subcamadas viscosa e logarítmica (Vieser et al., 2002).

35
A principal vantagem desta formulação é que a subcamada viscosa é levada em consideração
de uma forma simples e com baixo custo computacional. Para melhor uso da função de parede
automática é recomendável uma malha com 2≤+y para o primeiro nó fora da parede e 15
nós ao longo da espessura da camada limite (ANSYS CFX 10.0, 2002).
2.3.6. Condições de contorno
As condições de contorno ou de fronteira fecham o sistema de equações relacionadas ao
escoamento nos limites do domínio de solução.
A condição de entrada (Inlet) é a condição de contorno que define a magnitude, direção e
sentido do fluido que entra no domínio. Ela também carrega as informações sobre as
flutuações turbulentas e perturbações que estão presentes no escoamento nesta fronteira.
Existem diferentes maneiras de se definir a condição de entrada. No CFX é possível definir
valores para a vazão mássica, para a velocidade ou para a pressão como condição de entrada.
Definindo-se vazão mássica ou pressão na entrada é assumido um perfil uniforme para a
velocidade normal à fronteira. Definindo-se a velocidade na fronteira de entrada é possível se
estabelecer qualquer forma no seu perfil, inclusive o perfil uniforme normal à fronteira. Para
modelos de viscosidade turbulenta, as flutuações turbulentas na entrada são definidas de duas
maneiras: como intensidade turbulenta, definida pela Equação 2.54, ou com valores
específicos para k e ε. A definição de valores exatos para estas grandezas é complicada e
muitas vezes impraticável. É comum adotar o valor típico de 5% (ANSYS CFX 10.0, 2005)
para a intensidade turbulenta nesta entrada, supondo que o escoamento entra no domínio
medianamente perturbado, mas isto deve ser feito com cautela, pois a condição de entrada é
muito importante para os resultados.
2iii uuuI ′′= (2.54)
A condição de saída (Outlet) é a condição de contorno que define a magnitude, direção e
sentido do fluido que sai do domínio. No CFX é possível definir vazão mássica, velocidade

36
ou pressão como parâmetro de saída. Definindo-se valores médios para a vazão mássica ou
para a pressão na saída qualquer perfil de velocidade pode se estabelecer nesta fronteira.
Definindo-se velocidade na saída é necessário fornecer o seu perfil, sendo o padrão um perfil
uniforme e normal à fronteira. A condição de saída é restrita às regiões afastadas de
recirculações e gradientes adversos de pressão, ou seja, superfícies sem retorno de fluido. No
CFX, caso durante uma simulação exista a possibilidade de entrada de fluido por uma
superfície definida como saída o código irá impor uma parede artificial na área onde ocorreria
a entrada, bloqueando o fluido. Isto impõe uma restrição inconsistente com a física do
problema, e deve ser evitado.
Existem casos, como simulações de camada limite atmosférica, onde é inevitável que se tenha
entrada e saída de fluido por quase todas as fronteiras, para estes casos a condição de contorno
abertura (Opening) é recomendada. No CFX é possível definir pressão relativa ou perfil de
velocidades como parâmetros na abertura. Esta condição permite que o fluido esteja entrando
e saindo do domínio pela mesma fronteira. Mas, apesar de mais geral, a condição de abertura
é menos robusta numericamente do que condição de saída e não será usada no presente
trabalho.
A condição de contorno de parede (Wall) define fronteiras onde ocorrem interações do
escoamento com superfícies sólidas. Esta condição pode ser definida como sem
escorregamento - velocidade tangencial igual à zero na interface sólido/fluido - ou com
escorregamento - sem restrição à velocidade tangencial na interface.
Embora no nível das grandes escalas a turbulência seja um fenômeno assimétrico e
anisotrópico, quando a hipótese da viscosidade turbulenta é usada, todas as escalas são
filtradas e condensadas como efeito médio e isotrópico no escoamento. Baseado neste
conceito, uma geometria que apresente simetria pode ser simplificada numericamente através
de condições de contorno adequadas para o plano de simetria considerado. O uso deste
artifício reduz enormemente o domínio de solução e, conseqüentemente, a malha numérica,
reduzindo assim o custo computacional da simulação. Em uma condição de simetria
(Symmetry), é atribuído o valor zero aos gradientes das grandezas do escoamento normais ao
plano de simetria.

37
2.3.7. O método dos volumes finitos
Até o início da década de 70, dois métodos eram usados em CFD: diferenças finitas e
elementos finitos. O MDF era restrito a geometrias simples e o MEF não apresentava
ferramentas para tratar os termos advectivos presentes nas equações do movimento. Isto
motivou pesquisas para o aprimoramento do método dos volumes finitos (MVF), no qual as
equações aproximadas são obtidas através de balanços de conservação no volume elementar.
A possibilidade de associar a interpretação física à matemática influiu de modo considerável
para que praticamente todos os envolvidos com o MDF passassem a usar o MVF (Maliska,
1995).
Em pacotes comerciais de CFD com penetração industrial como o CFX, o MVF é o método
mais empregado. A preferência é em função da robustez, devido às características
conservativas do MVF. Como neste método os balanços de conservação devem ser satisfeitos
em nível de volumes elementares, para qualquer tamanho de malha, todos os princípios de
conservação podem ser conferidos em uma malha bastante grosseira. Ou seja, quase tudo
pode ser feito manuseando-se poucos resultados em execuções rápidas no computador. Em
outros métodos, pode-se apenas conferir a solução com uma malha refinada, já que o conceito
de balanços em volumes elementares não existe. Para compreender e interpretar os métodos
numéricos é necessário conhecer alguns conceitos (Maliska, 1995):
• Convergência – é a propriedade do método numérico de gerar uma solução que se
aproxima da solução exata quando o tamanho dos elementos discretos tende a zero.
• Consistência – é a propriedade dos esquemas numéricos de gerar um sistema de
equações algébricas que podem ser demonstradas como equivalentes às equações
governantes iniciais (diferenciais) quando o tamanho dos elementos discretos tende a
zero.
• Estabilidade – característica associada ao amortecimento dos erros durante a execução
do método numérico. Se uma técnica não é estável, até erros de arredondamento nos
dados iniciais podem levar a oscilação e divergência do cálculo.

38
Existem duas maneiras de se obter as equações aproximadas no MVF. A primeira é a
realização de balanços da propriedade em questão nos volumes elementares, ou volumes
finitos, e a segunda é a integração sobre o volume elementar, no espaço e no tempo, das
equações na forma conservativa. Forma conservativa, ou forma divergente, é aquela em que
na equação diferencial os fluxos estão dentro da derivada e, na primeira integração, aparecem
os fluxos nas fronteiras do volume elementar, equivalente, portanto, ao balanço.
Ambos os processos são equivalentes, pois, para deduzir as equações diferenciais que
representam os fenômenos físicos, é necessário primeiro realizar um balanço em um volume
finito, fazendo-se, em seguida, o processo de limites para obter a equação diferencial. No
MVF, as equações governantes são integradas em cada volume de controle, de tal forma que,
a quantidade pertinente, massa, momento ou energia seja conservada em um espaço discreto
destes volumes. A Figura 2.6 ilustra uma malha típica, em que se apresenta o volume finito,
representado pela área sombreada.
Figura 2.6 – Superfície do Volume Finito (Fonte: ANSYS CFX 10.0, 2005).
Observa-se que cada nodo, ou nó, é rodeado por um conjunto de superfícies que compõem o
volume finito. Todas as variáveis de solução e as propriedades do fluido são armazenadas nos
nós do elemento.
Fazendo a integração das equações RANS para um escoamento incompressível e isotérmico
em um volume de controle não deformável, e usando o teorema da divergência de Gauss para
converter algumas integrais de volume em integrais de superfícies, obtém-se:

39
0=∫A
jj dnu (2.55)
∫∫∫∫ ⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
+−=+∂∂
Aj
i
j
j
ieff
Aj
Ajji
Vi dn
xu
xu
dnpdnuudVut
μρρ (2.56)
∫∫∫ ⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
Γ=+∂∂
Aj
jeff
Ajj
V
dnx
dnudVt
φφρφρ (2.57)
As Equações 2.55, 2.56 e 2.57 são respectivamente as equações de conservação de massa,
momentum e de transporte generalizada. effμ é a viscosidade efetiva definida como
teff μμμ += , effΓ é a difusividade efetiva que para modelos de turbulência é igual à
viscosidade efetiva, dnj são as componentes diferenciais cartesianas do vetor de superfície
normal externo, V e A denotam, respectivamente, o volume e a superfície de integração. As
integrais de superfície são as integrações dos fluxos, considerando que as integrais de volume
representam termos de fonte ou acúmulo.
O primeiro passo para resolver numericamente estas equações é aproximá-las usando funções
discretas. Considerando um elemento de malha isolado, como o mostrado na Figura 2.7, os
fluxos de superfície devem ser representados de maneira discreta nos pontos de integração
para completar a conversão da equação contínua na forma discreta. Os pontos de integração,
ipn, ficam situados no centro de cada segmento de superfície do elemento tridimensional, que
cerca o volume finito.
Figura 2.7 – Elemento de malha isolado (Fonte: ANSYS CFX 10.0, 2005).

40
As formas discretas das equações integrais são:
( ) 0=Δ∑íp
ipjj nuρ (2.58)
( ) ( ) ∑∑ ∑ ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛Δ⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
+Δ=+⎟⎠⎞
⎜⎝⎛
∂∂
ip ipj
i
j
j
ieff
ip ipipiipiip
s
i nxu
xu
npumt
uV μρ & (2.59)
∑∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛Δ
∂∂
Γ=+⎟⎠⎞
⎜⎝⎛
∂∂
ip ipj
jeff
ipipip
sn
xm
tV φφφρ & (2.60)
( )
ipjjip num Δ= ρ& (2.61)
Onde V é o volume de controle, o subscrito ip denota um ponto de integração e Δnj é o vetor
de superfície discreto externo.
As equações resultantes apresentam quantidades derivadas e produtos não-lineares de
incógnitas que devem ser discretizadas de modo a se obter um sistema de equações algébricas.
As discretizações são obtidas através da aplicação de esquemas de discretização nos termos
das equações. A tarefa dos esquemas de discretização é fazer aproximações baseadas em uma
expansão do tipo série de Taylor para funções contínuas. A ordem de um esquema é definida
como sendo a ordem de truncamento da série de Taylor desenvolvida na obtenção do
esquema. Para avaliar os esquemas, Patankar (1980) formulou algumas propriedades que um
esquema de discretização deve apresentar para ser robusto e convergente:
• Conservativo – Esta propriedade diz respeito à consistência e define que um esquema
numérico deve garantir a conservação das propriedades do fluido ao longo de todo o
domínio. Isto é obtido através da expressão consistente dos fluxos através das
fronteiras dos volumes de controle. Esquemas de ordem maior que dois tendem a ser
não-conservativos.
• Limitado – Esta propriedade está ligada à estabilidade e convergência do método
numérico e requer que o valor da variável no nó calculado não exceda o máximo e

41
mínimo valores dos nós vizinhos para um problema sem fontes ou sumidouros. Uma
definição matemática para esta propriedade é que, para um esquema ser limitado a
matriz resultante deve ser diagonalmente dominante. Além da dominância diagonal,
todos os coeficientes das equações discretizadas devem apresentar o sinal positivo. A
manutenção do sinal positivo em todos os coeficientes implica que nós adjacentes
apresentam a mesma tendência. Um esquema que não apresenta esta propriedade pode
provocar oscilações numéricas na solução, resultando em valores sem significado
físico ou até mesmo na divergência numérica do cálculo.
• Transportador – Os escoamentos complexos envolvem dois fenômenos de transporte:
difusivo e advectivo. No transporte difusivo, a informação de um ponto influencia o
escoamento em todas as direções. No transporte advectivo, a informação influencia o
escoamento predominantemente no sentido do escoamento. Um esquema de
discretização que é transportador garante que as influências da direção e sentido dos
termos da difusão e advecção sejam computadas corretamente. O comportamento de
um escoamento com relação à direcionalidade pode ser verificado através do número
adimensional de Peclet (Equação 2.62), que quantifica a razão da advecção pela
difusão em um escoamento.
j
j
xu
PeΔ
=μ
ρ (2.62)
onde jxΔ é o comprimento característico do volume na direção j. Quando o número
de Peclet tende a zero o escoamento é predominantemente difusivo, quando o número
de Peclet tende a infinito o escoamento é predominantemente advectivo.
Assim sendo, um esquema de discretização para o termo difusivo deve ser capaz de
transportar as informações igualmente em todas as direções, já um esquema para o
termo advectivo deve ser capaz de transportar informações preferencialmente no
sentido do escoamento.

42
Deve ser lembrado que estas propriedades não são obrigatórias para o esquema, mas
recomendáveis. A seguir, são apresentados os esquemas usados no CFX para a discretização
espacial e temporal dos termos das equações diferenciais fundamentais.
Esquema espacial das diferenças centrais
No esquema de discretização espacial das diferenças centrais, os termos são discretizados
ponderando-se todos os pontos adjacentes. A Equação 2.63 apresenta a forma geral do
esquema.
( )22 j
j
dwup
ipjxO
xxΔ+
Δ
−=⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂ φφφ (2.63)
onde os subscritos up (de upstream) e dw (de downstream) representam, respectivamente, o
nó posterior, a jusante, e o anterior, a montante do nó de integração, conforme o sentido do
escoamento. ( )2jxO Δ representa o erro de truncamento de segunda ordem inerente ao esquema
em relação ao espaçamento da malha jxΔ , significando que o erro de truncamento é reduzido
quadraticamente com a redução de jxΔ . O esquema das diferenças centrais no CFX apresenta
duas opções de interpolação: entre o nó do ponto de integração e os nós vizinhos, chamada de
tri-linear, ou entre o nó do ponto de integração e a superfície de interface dos elementos
vizinhos, chamada de linear-linear ou bi-linear.
O esquema é conservativo e limitado para todos os termos se o número de Peclet para o
problema é menor que dois (Versteeg e Malalasekera, 1995). Para problemas com número de
Peclet maior que dois surge um coeficiente negativo nos termos advectivos, perdendo a
propriedade de limitado para estes termos. Além disto, o esquema computa a influência do nó
calculado em todas as direções, característica que torna o esquema difusivo.
Por ser um esquema difusivo de boa precisão (segunda ordem), ele é aplicado aos termos
difusivos no CFX (2005). Para evitar erros devido a oscilações numéricas que podem ser

43
causados por mau dimensionamento da malha para escoamentos a números elevados de
Reynolds, os termos advectivos não são tratados com o esquema de diferenças centradas no
CFX.
Esquema espacial upwind de primeira ordem
No esquema de discretização espacial upwind de primeira ordem, os termos são discretizados
ponderando apenas o nó adjacente seguindo a direção do escoamento. A Equação 2.64
apresenta a forma do esquema para uma malha uniforme e unidimensional (ANSYS CFX 10.0,
2005).
( )jj
ipup
ipjxO
xxΔ+
Δ
−=⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂ φφφ (2.64)
( )jxO Δ representa o erro de truncamento de primeira ordem presente neste esquema em
relação ao espaçamento da malha jxΔ , significando que o erro de truncamento é reduzido
linearmente com a redução de jxΔ .
O esquema upwind é conservativo e limitado para todos os termos em qualquer escoamento.
O esquema computa a influência do nó calculado apenas na direção do escoamento, sendo um
esquema advectivo. Sendo um esquema apenas de primeira ordem, só se aplica a estimativas
grosseiras em malhas desalinhadas, pois a incerteza relacionada ao esquema é grande neste
caso. Devido às suas características, ele é aplicável somente ao termo advectivo das equações
de momentum e transporte no CFX (2005).
Esquema espacial de segunda ordem híbrido
O esquema de discretização espacial de segunda ordem híbrido, desenvolvido por Barth e
Jasperson (1989), insere no esquema upwind de primeira ordem um fator de correção

44
numérica da advecção que pode ser interpretado como um fluxo anti-difusivo. A forma geral
do esquema é apresentada na Equação 2.65.
upjipj
ipupip xx ,Δ⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+=φβφφ (2.65)
onde ipβ é o fator de correção ou limitador, ( )ipjx∂∂φ é o gradiente do ponto de interação
em relação aos pontos adjacentes e upjx ,Δ é o vetor distância dos pontos adjacentes até o
ponto de integração.
O termo gradiente é discretizado pelo esquema de diferenças centradas, ponderando todos os
nós vizinhos em relação ao nó de integração. O fator limitador, ipβ , é computado localmente
buscando o valor mais próximo de 1 em que o esquema retenha a propriedade de limitado.
Quando ipβ é igual a 0 o esquema se torna o upwind de primeira ordem, quando ipβ é igual a
1 o esquema se torna formalmente de segunda ordem.
Para que o esquema seja limitado, o valor da variável no nó calculado não deve ficar fora do
intervalo dos valores máximo e mínimo dos nós vizinhos para um problema sem fontes.
Assim computando ( )nbipMINip MINIMO φφφ ,= e ( )nbip
MAXip MÁXIMO φφφ ,= , temos a relação
MAXipip
MINip φφφ ≤≤ .
Para cada nó vizinho ao nó calculado, é determinado um limitador usando a relação:
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
=−
<−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
>−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
=
01
0,1
0,1
ipk
ipkipk
ipMINip
ipkipk
ipMAXip
k
se
se,MINIMO
se,MINIMO
φφ
φφφφ
φφ
φφφφ
φφ
β (2.66)

45
Onde k varia de 1 a n, onde n é o número de nós vizinhos. O limitador do nó calculado é
definido através de:
( )nip MINIMO βββββ ,...,,, 321= (2.67)
O esquema de segunda ordem híbrido é conservativo e tem a propriedade de limitado para
todo o domínio. A precisão é boa já que tende a um esquema de segunda ordem, sendo menor
somente próximo de descontinuidades e em regiões de escoamento livre onde existem
pequenas variações das variáveis. O esquema é menos robusto que o esquema upwind, mas
devido às suas características é recomendada a sua aplicação ao termo advectivo das equações
de momentum e transporte no CFX (2005) para a obtenção de resultados finais.
Esquema temporal de Euler
No esquema de discretização temporal de Euler, os termos são discretizados ponderando o
valor da variável no nó entre o tempo presente e o(s) anterior(es). Para uma discretização de
primeira ordem, é usado apenas o tempo imediatamente anterior, conforme a Equação 2.68.
Para uma discretização de segunda ordem são usados os dois tempos imediatamente
precedentes, conforme Equação 2.69 (ANSYS CFX 10.0, 2005).
( )tOtt
Δ+Δ−
=∂∂ 0φφφ (2.68)
( )2000
212
231 tO
ttΔ+⎟
⎠⎞
⎜⎝⎛ +−
Δ=
∂∂ φφφφ (2.69)
onde Δt é o passo no tempo e os sobrescritos “0” e “00” referem-se á variável em tempos
passados. ( )tO Δ e ( )2tO Δ representam o erro de truncamento de primeira e segunda ordem,
respectivamente, presentes no esquema em relação ao tΔ .

46
Em regime permanente, o termo transiente é tratado com o esquema de Euler de primeira
ordem e é usado como um termo acelerador de convergência, sendo aplicado um falso avanço
no tempo, tΔ , como parâmetro de aceleração que guia a solução aproximada de maneira
física para uma solução convergida. Este artifício reduz o número de interações necessárias
para que a convergência seja alcançada.
2.3.8. Acoplamento pressão-velocidade
As equações do sistema são intrinsecamente acopladas porque todas as componentes de
velocidade aparecem nas equações do momentum e da continuidade. A questão mais
complexa a ser solucionada é a influência da pressão, que aparece nas equações de
momentum, mas sem haver uma equação evidente para sua solução.
Para um escoamento incompressível, o problema está em determinar um campo de pressões
que, quando inserido nas equações de movimento, origine um campo de velocidades que
satisfaça a equação da conservação de massa. Este forte acoplamento entre pressão e
velocidade causa dificuldades para a solução do sistema de equações.
Para solucionar o sistema de equações, é necessário fazer um arranjo da malha computacional,
determinando a posição relativa entre as componentes do vetor velocidade e a pressão. Muitos
arranjos são possíveis, mas usualmente apenas dois deles são empregados: o arranjo co-
localizado e o arranjo desencontrado.
O CFX usa um arranjo de malha co-localizado, no qual todas as variáveis estão localizadas e
armazenadas conjuntamente no centro de cada volume de controle. Patankar (1980) discutiu
que o uso de arranjos co-localizados pode levar a um campo de pressão não-acoplado. Rhie e
Chow (1982) propuseram uma discretização alternativa para o escoamento evitando o não-
acoplamento, e esta discretização foi modificada por Majumdar (1988) para remover a
dependência da solução em regime permanente do passo no tempo. Esta estratégia de
discretização é usada no CFX aplicando uma equação similar à do momento para cada ponto
de integração, obtendo uma expressão para a velocidade de advecção na forma das Equações
2.70, 2.71, 2.72 e 2.73.

47
( )0,
0,,, ˆˆˆ ipiipiipip
ipiipiipipiipi uufc
xp
xpfuu −−⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
∂∂
−∂∂
+= (2.70)
ipip
ipip dc
df
−=
1 (2.71)
AVdip −= (2.72)
tcip Δ
=ρ (2.73)
onde A é uma aproximação para o coeficiente central da equação do momentum excluído o
termo transiente, o sobrescrito “^” indica uma mediação do nó adjacente ao ponto de
integração e o sobrescrito “0” denota valor no passo de tempo anterior.
Quando substituída na equação da continuidade, a expressão ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂∂
−∂∂
ipiipiip x
pxpf
ˆ fornece
uma precisão de terceira ordem para o termo da dissipação ou redistribuição da pressão.
2.3.9. Método de solução
Para solucionar o sistema de equações é possível seguir duas metodologias: solução segregada
ou solução acoplada. A metodologia segregada emprega uma estratégia de solução onde, as
equações da quantidade de movimento são solucionadas com um campo de pressão estimado,
e depois uma equação de correção para a pressão é aplicada. Devido à natureza estimativa-
correção desta metodologia, um número grande de iterações e uma seleção muito cautelosa
dos parâmetros de sub-relaxação para as variáveis, no caso de regime permanente, são
necessários.

48
A metodologia acoplada, usada pelo CFX, soluciona as equações hidrodinâmicas como um
único sistema. A Figura 2.8 ilustra o procedimento geral de solução. A solução de cada
conjunto de equações consiste de duas operações numéricas intensas. Para cada passo no
tempo:
1) As equações não-lineares são linearizadas, obtendo os coeficientes iterativamente, e
inseridas na matriz principal;
2) As equações lineares são solucionadas, obtendo a solução das equações iterativamente;
Inicialização dos campos de solução
Início
Solução do perfil próximo a parede
Solução do sistema hidrodinâmico
Solução do modelo de turbulência
Transiente?
Critériode convergência ou
máximo de interaçõesalcançado?
Falso avançono tempo
Fim
Critériode convergência
alcançado?
Tempo totalalcançado?
Avançono tempo
Interação nopasso de tempo
Não
Sim
Não
Sim
Não
Sim
Sim
Não
Figura 2.8 – Estratégia de solução geral do CFX.
A iteração no tempo é controlada por um passo de tempo físico, global, ou por um passo de
tempo falso, local, configurado para avançar a solução no tempo para uma simulação em
regime permanente. No caso permanente, só existe uma interação de linearização por passo de
tempo virtual.

49
No CFX, a solução do sistema discreto de equações linearizadas é obtida usando a técnica
chamada Accelerated Incomplete Lower Upper Factorisation (AILUF). É um método iterativo
onde a solução exata das equações é aproximada durante a execução de várias iterações. A
cada iteração, o resíduo máximo ou RMS (Root Mean Square), para cada variável, é
comparado ao resíduo alvo para verificar a convergência. Quando o resíduo se torna menor ou
igual ao critério de convergência usado, o cálculo é encerrado. Um valor para o critério de
convergência para o resíduo RMS igual ou menor que 10-4 é considerado aceitável para uma
boa solução para a maioria das simulações industriais (ANSYS CFX 10.0, 2005).
Sozinhas, soluções iterativas, como AILUF, tendem a ter uma queda rápida de desempenho
com o aumento do número de elementos da malha computacional. O desempenho também
tende a cair se existem elementos com grande razão de aspecto, ou seja, com dimensões muito
desiguais. Esta queda de desempenho se dá porque uma solução iterativa só é eficiente na
redução dos erros que têm a ordem do comprimento dos elementos da malha.
O desempenho da solução é muito aprimorado com o emprego de uma técnica chamada
Multigrid (Brandt, 1977). O processo envolve executar as primeiras iterações na malha
original e empobrecer, ou seja, aumentar o tamanho dos elementos da malha para iterações
posteriores. Para prevenir a necessidade de gerar diferentes malhas para a mesma geometria é
usado o método Multigrid algébrico (Raw, 1996) que forma um sistema de equações discretas
para uma malha grosseira através da soma das equações da malha original. Isto resulta em um
empobrecimento virtual do espaçamento da malha durante a iteração, e o retorno à malha
original obtendo uma solução precisa. O uso desta técnica melhora significativamente a taxa
de convergência.
O CFX usa uma implementação particular do Multigrid algébrico chamado correção aditiva
(Hutchinson e Raithby, 1986). Esta abordagem é ideal para a implementação no CFX porque
as equações discretas são representativas do balanço das quantidades conservadas sobre o
volume finito. As equações para a malha mais grosseira são criadas “fundido” os volumes
finitos originais para criar volumes maiores como mostrado na Figura 2.9.

50
Malha fina original
Primeira malha grosseira
Segunda malha grosseira
Figura 2.9 – Método Multigrid algébrico.
A Figura 2.9 mostra a malha grosseira resultante como sendo regular, mas em geral a sua
forma se torna muito irregular.
2.3.10. Malhas
Um elemento importante da solução numérica é a malha. Ela representa a discretização do
domínio de solução. A malha é considerada como uma coleção de volumes algoritmicamente
descritos cobrindo toda a área do domínio coincidindo com as fronteiras. Os volumes são
referidos como células ou elementos de malha. Os vértices dos volumes são referidos como
nós da malha.
O conjunto de equações necessárias para a solução do problema CFD é associado a cada um
destes elementos com as fronteiras operando como condição de contorno para os elementos
próximos ou, quando coincida com a fronteira do domínio de solução, como condição de
contorno do domínio. O resultado da simulação é obtido através da solução associada de cada
um destes elementos. A qualidade do resultado do cálculo depende diretamente da qualidade
da malha. Não há critérios gerais para avaliar a qualidade de uma malha para um dado
problema; na prática, faz-se um estudo de independência de malha, realizando simulações nas
mesmas condições físicas e de contorno em malhas progressivamente mais refinadas até que

51
seja obtida uma malha na qual um maior refinamento não promova alterações significativas
nos resultados da simulação.
Uma malha estruturada apresenta a vantagem de permitir uma razão de aspecto grande nos
elementos sem provocar erros numéricos. Malhas estruturadas não são versáteis, não se
ajustando bem a geometrias complexas; este tipo de malha não lida bem com deformação dos
elementos, não sendo recomendáveis ângulos muito diferentes de noventa graus entre as
arestas do elemento.
Uma malha não-estruturada, por outro lado, é muito versátil e adaptável, podendo ser usada
em geometrias complexas sem maiores problemas. No entanto, apresenta problemas de
ordenação já que o número de elementos vizinhos para cada elemento pode ser diferente.
Além disto, estas malhas não permitem grandes razões de aspecto devido aos erros numéricos
que surgem nelas.
No CFX, o processo de geração de malha é dividido em três etapas:
1) Geração da malha superficial não-estruturada
Uma malha não-estruturada superficial de elementos triangulares é gerada sobre a geometria
através de dois possíveis métodos: triangulação de Delaunay e avanço de frente superficial
(AFSM – Advancing Front Surface Mesher).
A triangulação de Delaunay, um dos mais conhecidos métodos de geração de malhas não-
estruturadas, é efetuada em duas etapas. Na primeira etapa, pontos são posicionados em toda a
fronteira do domínio. Na segunda etapa, a triangulação de um conjunto de pontos é definida
pela condição de círculo vazio, a qual determina que um triângulo é válido quando a
circunferência que o circunscreve não inclui outro ponto do conjunto. A triangulação de
Delaunay maximiza os ângulos mínimos para todos os elementos triangulares superficiais
gerados, o que é um pré-requisito para uma boa qualidade de elementos de malha. Em geral é
recomendável usar o método Delaunay para gerar a malha superficial, mas em alguns casos
onde existam faces pobremente parametrizadas uma malha melhor pode ser obtida aplicando
o método AFSM (ANSYS CFX 10.0, 2005).

52
O método AFSM discretiza a fronteira, aplicando um algoritmo que ajusta os elementos
triangulares ao contorno, gerando uma frente que pode ser usada para a geração da malha
volumétrica. O método AFSM é mais lento que o método Delaunay, mas para algumas
geometrias é robusto e produz uma malha de melhor qualidade. Não é possível gerar malhas
onde existam faces fechadas (faces que interceptem a si mesmas, como a face curva de um
cilindro ou esfera) usando o método AFSM (ANSYS CFX 10.0, 2005).
2) Geração dos elementos volumétricos extrudados
As primeiras camadas volumétricas da malha podem ser obtidas através da extrusão dos
elementos superficiais, resultando em camadas de elementos prismáticos que apresentam
características de malha estruturada na direção normal a superfície. Esta técnica é chamada de
inflação (inflation). As camadas de malha extrudada geradas podem apresentar alta razão de
aspecto em relação ao sentido normal à parede, possibilitando malhas refinadas neste sentido,
como mostrado na Figura 2.10. Este artifício é usado para captar os efeitos de camada limite
sem um custo computacional elevado. É possível especificar o número de camadas e a
expansão dos elementos estruturados na direção normal à parede além da altura total das
camadas.
Figura 2.10 – Camadas de malha extrudada geradas usando inflação (inflation).
3) Geração dos elementos volumétricos não-estruturados
O método de geração de malha volumétrica não-estruturada, usado no CFX, é o avanço de
frente volumétrico (AFVM – Advancing Front Volume Mesher). O método gera elementos
volumétricos tetraédricos e piramidais avançando por camadas, partindo da malha superficial,
ou da superficial extrudada após o uso da inflação, até preencher todo o domínio com

53
elementos. O AFVM oferece a vantagem de um posicionamento dos pontos de alta qualidade e
integridade das fronteiras (Liseikin, 1999).
Para definir uma malha no CFX, é escolhido um valor global máximo de aresta para cada
elemento da malha que é usado em todo domínio e valores menores para refinamento da
malha em locais específicos do domínio. Estes refinamentos localizados podem ser definidos
em pontos, linhas ou planos no domínio, e configurados com um raio de influência que
delimita a extensão de influência do refinamento, e um fator de expansão que define o
aumento gradual dos elementos de malha fora da região de influência do refinamento até o
valor global máximo.
2.4. Estudos experimentais e numéricos realizados em geometrias similares à do BP
Estudos específicos da área nuclear abordando o escoamento através dos bocais de elementos
combustíveis nucleares são restritos e de difícil acesso. Entretanto, escoamentos através de
placas perfuradas e de geometrias similares foram muito estudados nas últimas décadas. Por
isto, esta revisão se concentra nas geometrias que compõe o bocal padrão - BP, em especial
em sua placa perfurada que é responsável por aproximadamente 70% da perda de carga
causada pelo BP.
No estudo de McFaddin et al. (1990) são apresentados resultados experimentais que mostram
que condicionadores de fluxo do tipo arranjo de tubos podem conservar assimetrias e
distorções do perfil de velocidades presentes no escoamento que antecedem os
condicionadores. Ainda em relação a arranjos de tubos, Karnik et al. (1992) mostraram que
neste tipo de condicionador, apesar do perfil de velocidade estar completamente
desenvolvido, o perfil de turbulência poderia não estar, o que pode levar a erros de medição.
Morrison et al. (1992a) mostraram que, para um escoamento onde o perfil de velocidades não
é uniforme, a perda de carga, para uma mesma vazão medida em uma placa de orifício, pode
ser até 21,5% maior do que aquela medida para um escoamento com perfil uniforme. Outro
estudo de Morrison et al. (1992b) mostrou que, em um escoamento onde a posição da

54
velocidade máxima não está localizada na linha central do canal, a perda de carga medida em
uma placa de orifício fica ainda mais comprometida devido à maior resistência do escoamento
com relação à mudança de direção.
Laws e Ouazzane (1995a) trataram experimentalmente da redução do erro para medida da
vazão em dispositivos de pressão diferencial através da obtenção de um perfil de velocidades
estável, ou seja, que não se altera ao longo do canal, antes da seção de teste. Em seus estudos,
o condicionador de fluxo do tipo placa perfurada com 19 orifícios, denominado LAWS,
obteve, após aproximadamente nove diâmetros de canal, um perfil de velocidades estável,
catorze diâmetros a menos que o comprimento especificado pela norma ISO 5167 (1980).
Laws e Ouazzane (1995b) ainda fizeram um estudo detalhado do efeito da espessura da placa
perfurada em condicionadores de fluxo do tipo ZANKER, uma placa perfurada seguida de um
arranjo de tubos com comprimentos iguais a um diâmetro do canal de escoamento. Foram
testadas placas perfuradas com hDl de 0,03; 0,05; 0,07; 0,10 e 0,12 com e sem o arranjo de
tubos posterior. Os pesquisadores constataram que uma placa perfurada espessa ( 12,0=hDl )
é capaz de homogeneizar o perfil de velocidades a uma distância mais curta do que uma placa
mais fina ( 03,0=hDl ) com um arranjo de tubos posterior a ela, mostrando que a espessura
da placa é um parâmetro de grande influência no comportamento do escoamento após uma
placa perfurada.
Spearman et al. (1996) fizeram uma série de experimentos para determinar a eficiência de
quatro diferentes condicionadores de fluxo do tipo placa perfurada colocados após uma curva
de 90º e uma curva em “S”. Das placas usadas, duas apresentavam chanfros na entrada dos
orifícios. O trabalho mostra que a presença do chanfro reduz em aproximadamente 45% a
distância em que se estabelece um perfil de velocidade estável e também que a presença de
chanfros nos orifícios da placa perfurada provoca uma redução na perda de pressão em
relação a placas sem chanfros.
Merzkirch e Schluter (1996) e Wendt et al. (1996) realizaram medições precisas dos perfis de
velocidade do escoamento após diferentes condicionadores de fluxo usando as metodologias
PIV (medida de velocidade por imagem de partículas) e LDA (anemômetro laser Doppler),
respectivamente. Os trabalhos mostram que condicionadores de fluxo do tipo placa perfurada

55
são muito eficientes na obtenção de um perfil de velocidades completamente desenvolvido,
agindo contra velocidades tangenciais, como rotação de fluido, e assimetrias no perfil de
velocidades anterior à placa.
Erdal e Andersson (1997) usaram um código comercial de CFD, o PHOENICS, que aplica a
metodologia dos volumes finitos, para simular o escoamento através de uma placa com um
orifício, testando efeitos de malha, condições de contorno, esquemas de discretização e
modelos de turbulência. Os cálculos foram realizados em duas dimensões. Os pesquisadores
concluíram que os esquemas de discretização de diferenças centrais, de segunda ordem, para o
termo da difusão, e o esquema upwind, de segunda ordem, para o termo advectivo, seriam os
mais adequados para este tipo de cálculo. O modelo de turbulência k-ε tradicional com função
de parede foi usado. Um estudo de dependência de malha foi feito para determinar a malha
que fornecesse o melhor resultado. Os estudos mostraram que a perda de carga é muito
dependente da malha, em especial da malha próxima à entrada do orifício. No estudo foi
determinado que, para obtenção de bons resultados, deve-se adotar uma razão de pelo menos
1000 elementos por diâmetro de duto no sentido axial próximo da entrada da placa. Foi
determinado também que um refinamento da malha no sentido axial é muito mais importante
que um refino no sentido radial, sendo o valor da perda de carga muito pouco dependente do
segundo. Os cálculos efetuados tiveram boa concordância com os dados experimentais,
apresentando uma diferença de 0,5% entre os valores de perda de carga. Os valores obtidos
para a energia cinética turbulenta foram super ou subestimados em certas regiões do
escoamento, mas apresentaram boa concordância qualitativa com os resultados experimentais.
Erdal (1997) usou o código CFD PHOENICS para obter campos de velocidade e turbulência
após placas perfuradas. Vários parâmetros como número de orifícios, coeficiente de área livre
e perímetro molhado foram estudados. Após estudo de malha, foi simulado apenas um setor
do duto com uma malha de 20 elementos tangenciais, 60 radiais e 150 axiais, sendo os
elementos axiais divididos da seguinte forma: 46 elementos antes da placa, 12 na placa e 92
após a placa. O modelo de turbulência k-ε tradicional com um modelo de parede foi usado.
Medidas experimentais do perfil de velocidades feitas a 2,5 diâmetros de distância da placa
mostraram grande concordância com os valores calculados para uma placa perfurada com
coeficiente de área livre, f , igual a 53%, apresentando desvio máximo do perfil de 3%. Foram

56
simuladas outras placas com f de 45%, 60% e 70%. Foi mostrado através destes testes que o
comprimento de recuperação da pressão após a placa e a perda de carga aumenta com a
redução de f. Também foram simuladas placas com diferentes números de orifícios. Estes
testes mostraram que um aumento do número de orifícios causa uma redução na perda de
carga e no comprimento de recuperação de pressão.
Gan e Riffat (1997) conduziram experimentos em uma placa de orifício e uma placa perfurada
com 145 orifícios espaçados uniformemente, ambas com uma razão de perfuração de 50%. O
fluido usado foi o ar, com número de Reynolds de 2x105. Os resultados experimentais
mostraram que a placa perfurada apresenta maior perda de carga do que a placa de orifício, o
que contraria os resultados de Idelchik (1960). Os autores usaram um código comercial de
CFD, o FLUENT, que usa o método dos volumes finitos, para simular as características de
perda de carga em placas de orifício e placas perfuradas em um duto quadrado e estudar o
efeito da espessura da placa na perda de carga. A placa perfurada foi simulada com orifícios
quadrados devido a dificuldades com a malha, a malha em si não foi apresentada no trabalho.
Foi usado o modelo de turbulência k-ε padrão, mas não foi mencionado o tratamento de
parede adotado. Um esquema de discretização upwind de segunda ordem foi usado para o
termo advectivo. Os resultados numéricos apresentaram uma diferença de 8% e 3% em
relação aos resultados experimentais na placa de orifício e placa perfurada, respectivamente.
Simulações foram feitas em placas com diferentes espessuras. Foi observado que a perda de
carga diminui com o aumento da espessura da placa, sendo as reduções mais drásticas quando
a placa passa a ter uma espessura maior que o diâmetro dos orifícios. Pela relevância do
assunto tratado no trabalho de Gan e Riffat, este estudo foi incluído nesta revisão, mas devido
à falta de detalhes e justificativas para certas abordagens e resultados ele é visto com grande
desconfiança com relação ao seu valor científico.
Morrison et al. (1997) estudaram o desenvolvimento do escoamento após condicionadores de
fluxo usando o código comercial FLUENT. As geometrias dos condicionadores não foram
simuladas, somente o escoamento posterior a elas, considerando um perfil de velocidades e
intensidade turbulenta na entrada do canal como sendo os gerados pelos condicionadores.
Uma malha bidimensional com 40 elementos radiais, 500 elementos axiais e y+ igual a 62
foram usados no cálculo numérico aplicando o modelo de turbulência k-ε padrão, com modelo

57
de parede e um critério de convergência de resíduo RMS de 10-4. Os perfis de velocidade
parabólico, uniforme e lei de potência 1/7 foram testados como condição de entrada no canal
juntamente com as intensidades turbulentas de 5%, 10% e 20%. O perfil da lei de potencia 1/7
e intensidade turbulenta de 10% na entrada alcançaram perfis de velocidade e turbulência
completamente desenvolvidos em um menor comprimento de canal, 20 diâmetros. Placas com
orifícios retangulares foram desenvolvidas para fornecer os mesmos perfis e intensidades
turbulentas testadas numericamente. Medições usando LDA mostraram boa concordância com
os resultados numéricos.
Ouazzane e Benhadj (2002) fizeram um estudo experimental em condicionadores do tipo
placa perfurada inserindo antes da placa uma restrição do tipo estrela (ETOILE), que separa a
seção transversal do canal em setores como fatias de pizza. Os resultados mostraram que o
conjunto restrição do tipo veia – placa perfurada apresenta o melhor desempenho como
condicionador de fluxo, apresentando menor perda de carga e remoção rápida de distorções
no escoamento.
Frattolillo e Massarotti (2002) usaram o código comercial FLUENT para estudar
condicionadores de fluxo do tipo arranjo de tubos (segundo a ISO 5167 (1980) com 19 tubos),
ETOILE (placas distribuídas equidistantemente no sentido azimutal) e placa perfurada
(LAWS). Foram usadas malhas tridimensionais não-estruturadas de até meio milhão de nós. O
modelo de turbulência k-ε e modelo de parede padrão foram utilizados nas simulações.
Estudos de influência de malha indicaram que uma malha mais fina produziria resultados
melhores, mas as limitações computacionais das instalações dos autores não permitiam tais
malhas. Foram realizadas simulações de escoamento com água com Reynolds da ordem de
105, assumindo paredes lisas. Os domínios simulados incluíam uma ou duas curvas antes dos
condicionadores para gerar um perfil de velocidades distorcido. O condicionador do tipo placa
perfurada apresentou um ótimo comportamento com relação à rotação, simetria e perfil de
velocidades. Resultados de cálculos nas geometrias sem os condicionadores mostraram
grande concordância com dados experimentais de outros autores. Os resultados obtidos com
os condicionadores apresentam concordância com valores experimentais de outros autores,
mas uma validação através de experimentos próprios seria necessária.

58
Burden e McLaury (2002) fizeram um estudo numérico, usando o código comercial ANSYS
CFX, com validação experimental, de um escoamento em canal com redução e expansão
brusca, com e sem arredondamento na entrada da redução. Foram medidos os perfis de
velocidade e energia cinética turbulenta usando um LDV (velocímetro laser Doppler). Três
modelos de turbulência foram avaliados: k-ε padrão, k-ε RNG e um modelo de tensão de
Reynolds diferencial. Foram aplicados dois esquemas de discretização: híbrido (que mescla
upwind de primeira ordem com diferenças centrais de segunda) e QUICK (upwind quadrático
de terceira ordem). Foram feitos testes em malhas aplicando três refinamentos diferentes no
sentido radial: 1,57; 3,15 e 6,30 elementos/mm. Resultados obtidos usando a pior malha com
o esquema QUICK se mostraram mais próximos dos valores experimentais do que os obtidos
com a melhor malha usando o esquema híbrido. A malha mais refinada com o esquema
QUICK foi escolhida para os cálculos. Os modelos k-ε RNG e o da tensão de Reynolds
diferencial apresentaram os melhores resultados, principalmente na entrada da redução. Os
resultados experimentais e numéricos mostraram que a presença de um arredondamento reduz
em aproximadamente seis vezes a energia cinética turbulenta na região da redução.
Xiong et al. (2003) obtiveram resultados experimentais, através de PIV, do escoamento após
três condicionadores de fluxo, um tipo arranjo de tubos e dois tipos de placa perfurada. Os
experimentos foram realizados com Reynolds de 105. Eles mostram que o distúrbio causado
pelo condicionador desaparece após aproximadamente quatro diâmetros de canal, neste
aspecto, os condicionadores, em particular as placas perfuradas, podem ser comparadas a
grades de turbulência usadas para gerar turbulência homogênea e quase-isotrópica. Foi
observado que o campo de turbulência, expresso pelas tensões de Reynolds, não atinge um
estado de equilíbrio nem a 50 diâmetros, onde foram feitas as últimas medidas. Uma
comparação entre os três condicionadores mostra que o desempenho das placas perfuradas é
superior ao do arranjo de tubos.
Liu et al. (2004) estudaram a turbulência em um túnel de vento através de placas perfuradas
com diferentes valores de coeficiente de área livre, f , e diâmetro de orifício, od . Foi
constatado que a placa de maior f gerou uma homogeneidade maior da intensidade turbulenta
em diversas posições da seção transversal após a placa. A intensidade turbulenta observada
aumentou com a redução de f. Foi observado que na faixa de números de Reynolds estudada

59
(15.000 – 29.000) não houve influência deste parâmetro na intensidade ou na maior escala da
turbulência, significando que as flutuações de velocidade aumentaram proporcionalmente ao
aumento da velocidade global do escoamento. Foi mostrado que a intensidade turbulenta
decai à medida que se afasta da placa segundo uma lei de potência. Foi também observado
que a escala integral da turbulência aumenta com a redução da razão de perfuração, isto
devido ao aumento do espaço entre os orifícios que implica em uma maior expansão dos jatos
de fluido gerados após os orifícios e um aumento da camada cisalhante dos mesmos. A
espessura desta camada entre jatos está diretamente relacionada ao tamanho das estruturas
turbilhonares formadas. Desta forma a escala integral da turbulência para placas perfuradas
com a relação ( ) oo ddPasso − menor que um é limitado pelo diâmetro do orifício da placa.
Estes estudos refletem o estado da arte no âmbito de placas perfuradas. Ainda existem muitas
questões a serem exploradas, principalmente, no que diz respeito a metodologias numéricas.
O escoamento através do Bocal Padrão do elemento combustível (BP), que tem como
componente principal a placa perfurada, ainda não foi suficientemente explorado na
comunidade cientifica. Este trabalho se propõe a aprofundar no estudo numérico de placas
perfuradas e desenvolver uma metodologia numérica para a simulação e avaliação do
escoamento através do BP de reatores nucleares.

60
3. METODOLOGIA EXPERIMENTAL
3.1. Aspectos gerais
Os experimentos realizados para a avaliação da perda de pressão no BP (Bocal inferior
Padrão) foram executados em uma seção de testes constituída de um envoltório (housing), de
seção quadrada com tomadas para medições de pressão ao longo de seu comprimento e do BP
atualmente em uso no reator do tipo Angra II. Foram realizadas medições de perda de pressão
cobrindo Reynolds de ~100.000 à ~950.000 (Navarro, 2006).
Os experimentos foram conduzidos por equipes do Centro de Desenvolvimento da Tecnologia
Nuclear (CDTN) e do Centro Tecnológico da Marinha (CTMSP) no Circuito Hidrodinâmico
do Reator (CHR) do CTMSP.
3.1. Circuito hidrodinâmico do reator (CHR)
As Figuras 3.1 e 3.2 mostram, respectivamente, o fluxograma simplificado e uma foto do
Circuito Hidrodinâmico do Reator (CHR) adaptado para experimentos de perda de carga em
BPs. A Tabela III.1 apresenta dados dos principais componentes do CHR.
Tabela III.1 – Dados dos principais componentes do CHR.
Componente Características Valor
Bombas B1, B2, B3 e B4 Vazão nominal por unidade.
Altura de carga nominal
Motor
129 m3/h
57 mca
50 cv
Aquecedores AQ1, AQ2, AQ3 e AQ4 Potência 4 x 15 kW
Trocador TC1 Potência térmica
Vazão nos tubos
150 kW
21,4 m3/h
Tanque TQ1 Volumes real/útil 7/6 m3

61
AQi – Aquecedor TC – Trocador de calor Bi – Bomba TQ – Tanque DPs – Tomadas de pressão TE – Temperatura de entrada da seção de testes FE – Placa de orifício (ISO 5167, 1980) TI – Indicador de temperatura local PI – Indicador de pressão local Vij – Válvula (NA – normalmente aberta) ST – Seção de testes
Figura 3.1 – Fluxograma simplificado do Circuito Hidrodinâmico do Reator (CHR)
Figura 3.2 – Foto do Circuito Hidrodinâmico do Reator (CHR).

62
3.2. Seção de testes e instrumentação
As Figuras 3.3 e 3.4 mostram detalhes das montagens utilizadas nos experimentos. A Figura
3.3 mostra o posicionamento das conexões para as medições das perdas de pressão em cada
face e ao longo do comprimento do housing e mostra ainda um retificador de fluxo,
posicionado a montante da seção de testes. A Figura 3.4 mostra uma vista explodida da
montagem da seção de testes. A Figura 3.5 mostra fotos de um dos conjuntos investigados e
do envoltório com as conexões nas tomadas de pressão. A Tabela III.2 mostra as principais
dimensões de projeto da seção de testes.
Tabela III.2 – Características da seção experimental
Características Valores
Housing
Comprimento [mm] 1439
Largura interna [mm] 0,23000 (+ 0,00075)
Bocal
Largura [mm] 229,5
No. de orifícios 80 145
Diâmetro dos orifícios [mm] 10 12
Chanfro dos orifícios [mm / o] 1 / 45
Área de escoamento [mm2] 22.682,30
A instrumentação foi constituída de 11 sensores/transmissores para determinação dos
seguintes parâmetros:
• Temperatura do fluido: Tst - na seção de testes.
• Temperatura de fluido: Tpo - na placa de orifício.
• Pressão na entrada da seção de testes (P).
• Vazão mássica: qm - determinada através das diferenças de pressão na placa de
orifício, DPpo1 ou DPpo2.
• Diferenças de pressão ao longo da seção de testes: DP1, DP2, DP3, DP4, DP5 e DP6
para medições de DP23, DP24, DP25, DP26, DP27 e DP47, mostrados na Figura 3.6.

63
544
25
519
25
26
243
65
452
640
751
861
1050
6633 25 10
40
1999
1439 13
8012
6080
576
873
970
954
447
470
165
59
3845
4
114
40
25 8965
3
210
746.
5
5517
4269
969222
Ф228.7
Ф230
Ф249.6
38
544
25
519
25
26
243
65
452
640
751
861
1050
6633 25 10
40
1999
1439 13
8012
6080
576
873
970
954
447
470
165
59
3845
4
114
40
25 8965
3
210
746.
5
5517
4269
969222
Ф228.7
Ф230
Ф249.6
38
Figura 3.3 – Seção de testes.
Condicionador de fluxo
BP

64
Placa de sustentação
Tubos guia de sustentação Tampões dos orifícios dos tubos guias não utilizados
Bocal
Guarnição
Envoltório
Guarnição
Figura 3.4 – Montagem da seção.

65
Figura 3.5 – Bocal, seção de testes e o envoltório com seção de testes instalados no CHR.
Figura 3.6 – Posicionamento do bocal e das tomadas de pressão na seção de testes.

66
Em cada uma das sete cotas marcadas no desenho à esquerda na Figura 3.6, foram montadas
conexões para tomadas de pressão conforme mostrado na Figura 3.7. Em cada cota, havia
uma conexão tipo cruzeta que permitia a medição com até três transmissores de pressão. As
válvulas de engate macho e fêmea são válvulas de retenção que permitem o fluxo apenas após
o engate. A face na qual a cruzeta foi instalada foi definida após testes preliminares. As
demais tomadas não utilizadas foram bloqueadas. As tomadas para medição da diferença de
pressão na placa de orifício (Figura 3.8) foram montadas segundo a norma ISO 5167 (1980).
Figura 3.7 - Montagem das tomadas de pressão diferenciais em cada uma das posições
definidas na Figura 3.6.
Figura 3.8 - Montagem das tomadas de pressão na placa de orifício.

67
Cada transmissor de pressão diferencial teve sua válvula manifold (distribuidora), conexão
para mangueira de nylon nas duas pernas da válvula, mangueira de nylon com comprimento
adequado até a tomada de pressão correspondente e o engate macho nesta extremidade, como
mostrado na Figura 3.9. A Figura 3.10 mostra a disposição dos transmissores no ambiente
experimental.
Figura 3.9 – Montagem dos transmissores de pressão.
Figura 3.10 – Disposição dos transmissores.
Foram utilizados seis transmissores para as medições das diferenças de pressão na seção de
testes. Para cada uma das diferenças medidas, foram utilizados, no mínimo, dois
transmissores. A Tabela III.3 apresenta as faixas dos sensores e transmissores ajustados e
calibrados para os experimentos. Para cobrir toda a faixa de vazão de água, definida na Tabela

68
III.4, foram utilizados dois transmissores na medição da perda de pressão através da placa de
orifício. Todos os sinais foram enviados às placas de condicionamento (PCLD 789D) e de
conversão de sinais A/D (PCL 818HD) da Advantech, processados por um programa que os
convertia para as unidades de interesse. Estes dados eram ainda mostrados na tela de um
micro computador para acompanhamento em tempo real dos experimentos e para gravação.
Tabela III.3 – Faixa dos medidores utilizados
Sensor/transmissor Parâmetro Faixa calibrada
Termopares K com transmissor 4-20 mA Tpo
Tst
18o C a 80o C
18o C a 80o C
Transmissor manométrico 4-20 mA P 9,8 bar
Transmissor diferencial 4-20 mA – medida de DP na
placa de orifício, DPpo
DPpo1
DPpo2
500 mbar
2,5 bar
Transmissor diferencial 4-20 mA - medida de DP23;
DP24; DP25; DP26; DP27, DP47
DP1
DP2
DP3
DP4
DP5
DP6
30 mbar
80 mbar
150 mbar
250 mbar
240 mbar
500 mbar
3.3. Condições e procedimentos experimentais
A Tabela III.4 apresenta os valores de vazão e temperatura pré-estabelecidos para os
experimentos. Após estabilização da vazão e da temperatura, todos os parâmetros descritos na
seção anterior e suas respectivas incertezas de medição eram gravados. Em função do nível de
diferença de pressão entre as tomadas, eram definidos os transmissores mais adequados para
as medições de DP23, DP24, DP25, DP26, DP27 e DP47. Foram gravados valores médios de 100
varreduras dos valores medidos/calculados. O tempo de varredura dos 11 canais, adicionado
ao tempo de processamento dos dados, foi de ~ 2 s.

69
A tomada de pressão 1 não foi utilizada nos experimentos devido à grande oscilação
observada nas medições preliminares de pressão, ocasionada pela proximidade do retificador
de fluxo e da grade filtrante posicionados logo abaixo da tomada.
Tabela III.4 – Vazões pré-estabelecidas para os experimentos.
Vazão [kg/s] Temperatura [oC] Reynolds
16 40 100.000
49 40 300.000
82 40 500.000
115 40 700.000
115 55 900.000
3.4. Levantamento e processamento dos dados
Esta seção resume a metodologia utilizada no processamento dos dados coletados. A
metodologia utilizada na determinação das incertezas dos parâmetros levantados nos
experimentos foram implementadas no programa de coleta e tratamento de dados para
determinação em tempo real de cada grandeza e de sua incerteza.
3.4.1. Parâmetros primários
As tensões lidas no computador são convertidas em unidades de interesse segundo as
equações abaixo.
iiii BUAY += (3.1)
( )1
1
2
−
−
=∑
−
N
UU
s
N
ji
ji
Ui (3.2)

70
N
ss i
i
UU = (3.3)
Onde N
U
U
N
j
ji
i
∑== 1 = tensão média de N leituras no computador [volts], os desvios são
calculados segundo as Equações 3.2 e 3.3. Os parâmetro, iY , estão indicados na Tabela III.5.
Tabela III.5 – Parâmetros i.
Y0 = Tpo Y1 = Tst Y2 = P Y3 = DPpo1
Y4 = DPpo2 Y5 = DP1 Y6 = DP2 Y7 = DP3
Y8 = DP4 Y9 = DP5 Y10 = DP6
As incertezas advindas das placas de coleta de dados (Advantech - PCL816HD e PCLD789D)
e aquelas devido à dispersão foram estimadas segundo as equações abaixo.
( ) ( )( ) 2/1222 )2(001,000244,0 Uii sU ++=δ (3.4)
2/1222
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
i
i
i
ii
i
iYTr
RR
YUA
YY δδδδ
(3.5)
Onde 0018,0=RRδ .
Para linhas calibradas, Ai e Bi são os coeficientes da reta ajustada com a incerteza de catálogo
dos medidores para os parâmetros Yi segundo csTr cii δδ += 2 . Sendo c
is o erro padrão da
curva ajustada e δc o erro do sistema padrão. Para linhas não calibradas, os coeficientes são
obtidos das relações 3.6 e 3.7.

71
RF
A ii 016,0
= (3.6)
ii FB 25,0−= (3.7)
R é a resistência utilizada na placa 789 igual a 50,77 ohms, e as faixas ajustadas dos
transmissores, iF , estão indicadas na Tabela III.6.
Tabela III.6 – Faixas ajustadas dos transmissores iF .
F0 = 300 oC F1 = 300 oC F2 = 9,8 bar oC F3 = 500 mbar
F4 = 2,5 bar F5 = 30 mbar F6 = 80 mbar F7 = 150 mbar
F8 = 250 mbar F9 = 240 mbar F10 = 500 mbar
As incertezas para linhas não-calibradas são dadas na Tabela III.7.
Tabela III.7 – Incertezas de catálogo dos medidores para os parâmetros Yi.
Incerteza Valor
δTrTpo 1,18 oC
δTrTst 1,18 oC
δTrP 0,01 bar (0,1% da faixa)
δTrDPpo1 1,25 mbar (0,25% da faixa)
δTrDppo2 0,001875 bar (0,075% da faixa)
δTrDP1 0,0225 mbar (0,075% da faixa)
δTrDP2 0,2 mbar (0,25% da faixa)
δTrDP3 0,375 mbar (0,25% da faixa)
δTrDP4 0,625 mbar (0,25% da faixa)
δTrDP5 0,6 mbar (0,25% da faixa)
δTrDP6 1,25 mbar (0,25% da faixa)

72
3.4.2. Parâmetros derivados
As propriedades da água na faixa de temperatura de 5 oC < T < 60 oC foram ajustadas
segundo curvas obtidas através de pontos da tabela IAPWS-IF97. São apresentadas abaixo,
juntamente com as incertezas associadas, as curvas para a massa específica, ρ, e a viscosidade
dinâmica, μ.
][52806,100010731448,31020822,4 3223 mkgTxTx +−−= −−ρ (3.8)
( )2/1
22
0004,000841644,003731448,0 ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−=
ρδ
ρρδ TT (3.9)
].[10748098,11010784,5108748,71088346,4 352735 sPaxTxTxTx −−−− +−+−=μ (3.10)
( )2/1
22
2 01,046503,1 ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+−=
μδ
μμδ TT10xT 10 x 1,574 10 x 5,10784 4-6-5- (3.11)
Sendo TpoT = ou TstT = de acordo com o local da medição. As incertezas de 0,0004 e
0,01, para ρ e μ respectivamente, consolidam incertezas da Tabela IAPWS-IF97, da curva
ajustada e da dependência com a pressão.
Outro parâmetro derivado é a vazão, obtida através da diferença de pressão na placa de
orifício usando as relações abaixo. O diâmetro do orifício da placa é de 0,09786 m, e o
diâmetro da tubulação é de 0,13578 m.
]/[24
2 skgpdECq dm Δ= ρπε (3.12)
]/[3600 3 hm
qq m
v ρ= (3.13)

73
( ) 3144
75,065,281,2
0169266,01039,0
Re100029,0184,00312,05959,0
βββ
βββ
−−+
+⎥⎥⎦
⎤
⎢⎢⎣
⎡+−+=
−
DdC
(3.14)
( ) 2/141−
−= βE (3.15)
Onde β = d/D , μπD
qmD
4Re = e ∆p = DPpo1 ou DPpo2. As incertezas associadas a cada
parâmetro são apresentadas na Tabela III.8.
Os efeitos de dilatação devido à temperatura foram corrigidos segundo a equação abaixo:
( )( )ToTToxx −+= α1ll (3.16)
Onde To = temperatura de calibração/medição do comprimento e α é o coeficiente de
dilatação linear para cada material, sendo igual a 12x10-6[1/oC] para o aço do housing,
17x10-6[1/oC] para o aço da placa de orifício, 5,6x10-6[1/oC] para o Zircaloy dos tubos-guia e
67x10-6[1/oC] para o PVC.

74
Tabela III.8 – Incertezas relativas no cálculo da vazão.
Incerteza Valor
ddδ 0,0007
DDδ 0,006
dd CCδ 100β
EEδ
( ) βδβ
ββ
4
4
1−
βδβ 2/122
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
DD
dd δδ
m
mqqδ
+⎟⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎢⎢⎣
⎡+⎟
⎠⎞
⎜⎝⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ 22422
4DD
ECEE
CC
dd
d δβδδ
2/122224
41
4114
⎥⎥⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρδρδδβ
DPDP
dd
ECd

75
4. METODOLOGIA NUMÉRICA
4.1. Aspectos gerais
Um estudo foi realizado para determinar uma metodologia numérica adequada para avaliar a
perda de carga através do Bocal Padrão inferior do elemento combustível nuclear (BP)
utilizando o código comercial ANSYS CFX 10.0 (2005), baseado no Método dos Volumes
Finitos (MVF). O escoamento através do BP foi considerado incompressível, isotérmico, sem
transferência de massa ou reação química e em regime permanente. As equações RANS foram
discretizadas aplicando-se o esquema das diferenças centrais para os termos difusivos e o
esquema de segunda ordem híbrido para os termos advectivos. Cinco computadores Intel
Pentium IV HT 3.2 GHz com 3 GB de memória RAM, 160 GB de disco rígido e sistema
operacional Windows XP, do laboratório de termohidráulica do CDTN foram usados. O
recurso de processamento em paralelo, em que a malha é dividida e distribuída entre dois ou
mais computadores ligados em rede para uma solução simultânea, foi utilizado nas simulações
com malhas maiores que 2,3 milhões de elementos. O estudo foi dividido em quatro etapas:
(1) Definição dos parâmetros de malha
Como descrito anteriormente, uma malha grosseira pode levar a resultados falsos, enquanto
que uma malha refinada em excesso pode acarretar um tempo computacional elevado ou
mesmo inviabilizar o cálculo. Não existem regras gerais para dimensionamento de parâmetros
de uma malha ótima. Um estudo de malha faz-se então necessário para que esses parâmetros
possam ser dimensionados adequadamente.
(2) Definição do modelo de turbulência
A geometria e condições físicas do escoamento são fatores relevantes na escolha do modelo
de turbulência adequado. O esforço computacional imposto pelo modelo escolhido para
solução do problema também deve ser considerado. Dentre as diversas abordagens e modelos
de turbulência disponíveis na literatura, os modelos baseados no conceito de viscosidade
turbulenta a duas equações se destacam pelo relativo baixo custo computacional com boa

76
qualidade nos resultados de simulações de escoamentos semelhantes aos estudados neste
trabalho. Nas simulações deste estudo foram avaliados os modelos a duas equações de
viscosidade turbulenta k-ε, k-ω e SST.
(3) Definição das condições de contorno
Para um processo de validação através de resultados experimentais, as condições de contorno
da simulação numérica devem ser definidas exatamente como as obtidas nos experimentos.
Qualquer diferença pode gerar resultados numéricos muito distintos, especialmente no que se
refere à turbulência. A definição do contorno mais adequado da geometria a ser simulada deve
ser avaliada.
(4) Validação do modelo numérico através de comparação com resultados
experimentais
Ao final, todo modelo numérico deve ser validado analítica, experimental ou numericamente.
Isto se deve à grande desconfiança com relação a resultados de CFD e aos inúmeros cuidados
que se deve ter na determinação de um modelo numérico, especialmente quando geometrias e
situações complexas estão envolvidas. Formulações clássicas, relações empíricas ou semi-
empíricas, experimentos e cálculos DNS são usados para validar o modelo numérico dando a
ele confiabilidade.
Com o uso da metodologia RANS, foi possível considerar simétrico, em termos médios, os
escoamentos turbulentos presentes nas simulações realizadas. O recurso de simetria foi
adotado em todas as simulações, reduzindo significativamente as dimensões das geometrias
simuladas e, por conseguinte, a malha gerada. Todas as geometrias foram simuladas em
simetria de 1/8 como é exemplificado na Figura 4.1, que mostra em destaque a região
simulada de 1/8 de uma placa perfurada, a menos quando indicado o contrário. Este artifício
foi usado para possibilitar que as complexas geometrias envolvidas no BP fossem simuladas.
A Figura 4.1 também mostra os eixos de coordenadas e o ponto de origem de referência,
usados em todos os cálculos realizados.

77
z
yx
y
xz
Sentido doescoamentoz
yx
z
yx
y
xz
y
xz
Sentido doescoamentoSentido doescoamento
Figura 4.1. – Eixo de coordenadas e ponto de origem para todos os cálculos. Figura da
esquerda destaca a região simulada da placa perfurada.
Para todas as etapas executadas neste trabalho, apresentadas em detalhe nas seções seguintes,
foram aplicadas as condições de contorno apresentadas na Tabela IV.1 e exemplificadas, para
uma placa perfurada, na Figura 4.2. Devido à baixa rugosidade apresentada pelas superfícies
do canal e do BP nos experimentos, todas as superfícies das geometrias estudadas foram
consideradas paredes lisas.
Entrada
Saída
Simetria
Parede do canal
Entrada
Saída
Simetria
Parede do canal
Figura 4.2 – Exemplo das condições de contorno aplicadas para as simulações.

78
Tabela IV.1 – Condições de contorno.
Contorno Condição especificada
Entrada do domínio Vazão mássica e perfil de velocidades uniforme
Saída do domínio Vazão mássica
Superfícies de simetria Simetria
Paredes do canal e da geometria estudada Parede lisa sem deslizamento
4.2. Estudo de malha
Devido à complexidade da geometria do BP e ao conseqüente alto custo computacional
(tempo, memória) nas simulações, dividiu-se o BP em duas partes: placa perfurada e
direcionador de fluxo, como mostrado na Figura 4.3. Os aspectos particulares das simulações
de cada geometria foram analisados separadamente. Um estudo de malha foi realizado em
cada uma das duas geometrias, visando à obtenção de parâmetros de malha que forneçam
resultados de perda de carga independentes da malha usada. Assume-se que os parâmetros de
malha ótimos definidos para a placa perfurada e o direcionador de fluxo quando aplicados ao
BP conduzirão a um resultado independente da malha.
Figura 4.3 – O BP separado em placa perfurada e direcionador de fluxo.
As simulações desta etapa foram executadas na condição de escoamento experimental com
maior número de Reynolds. Isto devido ao número de Reynolds maior implicar em um
espectro mais largo de estruturas turbulentas, sendo assim, do ponto de vista da turbulência, a
condição de escoamento mais restritiva.

79
Inicialmente, para os estudos de malha foi utilizado o modelo de turbulência k-ε,
classicamente usado em estudos numéricos de placas perfuradas. Em uma etapa posterior,
outros modelos de turbulência foram avaliados.
4.2.1. Estudo de malha em placas perfuradas
O estudo de malha na placa perfurada foi realizado em uma placa de seção quadrada com 81
orifícios circulares uniformemente distribuídos (9 x 9), apresentando um coeficiente de área
livre f = 0,43065, igual ao da placa do BP. Esta placa foi escolhida para o estudo de malha por
conservar a relação entre a espessura da placa e o diâmetro dos orifícios maior que um e ao
mesmo tempo ser possível executar um número razoável de simulações em tempos e memória
exigidos relativamente pequenos. As características geométricas da placa perfurada e do canal
de escoamento usados estão na Tabela IV.2.
Tabela IV.2 – Características geométricas da placa perfurada com 81 orifícios.
Parâmetro Valor [mm]
Diâmetro dos orifícios 18,88
Passo entre orifícios 25,50
Espessura da placa 20
Lado da placa e do duto 229,50
Comprimento a jusante da placa* 710
Comprimento a montante da placa* 700
*Em relação à z = 0 mm.
A geração de malha na placa perfurada foi parametrizada pelo diâmetro do orifício ( od ) da
placa usando a relação oa dl (comprimento de aresta do elemento da malha / diâmetro do
orifício) para definir a malha em cada região. O uso deste artifício permite que malhas para
outras placas perfuradas sejam geradas com as mesmas características estabelecidas no estudo
de malha.

80
O diâmetro do orifício foi usado na parametrização da malha, tanto na região da placa
perfurada como na região posterior a ela, por estar relacionado diretamente, segundo Liu et al.
(2004), à maior escala da turbulência em placas com ( ) oo ddPasso − menor que um como as
placas estudadas e o BP.
Todas as malhas testadas foram definidas com um comprimento global máximo de aresta
igual a 16,5 mm. Este valor de aresta foi reduzido nas proximidades da placa perfurada e na
região posterior a ela.
Na placa perfurada ocorrem rápidas contrações e expansões no escoamento do fluido
definindo altos gradientes de velocidade e pressão. Para melhor capturar estes efeitos, foi
definido um plano de refinamento no centro da placa com uma extensão de influência igual à
espessura da própria placa, ou seja, raio de influência igual à metade da espessura da placa,
como mostrado na Figura 4.4.
Extensão de influência do refinamento após a placa
Refinamento placa
Refinamento após a placa
Figura 4.4 – Planos de refinamento na placa perfurada.
O comprimento de aresta foi obtido com o auxílio da relação trigonométrica dada pela
Equação 4.1, onde α é o ângulo de divisão da circunferência do orifício da placa perfurada,
como ilustrado na Figura 4.5. Simulações na placa perfurada com 81 orifícios foram
realizadas aplicando diferentes valores para a relação oa dl neste plano. As arestas dos
elementos fora do plano de refinamento foram multiplicadas pelo fator de expansão 1,1 até
alcançarem o tamanho dos elementos das regiões vizinhas.

81
αcos2221
−=o
adl
(4.1)
Figura 4.5 – Comprimento da aresta do elemento ( al ).
A região posterior à placa apresenta jatos de fluido com altas velocidades originadas dos
orifícios que se estende por vários diâmetros de orifício. Nesta região, parte da energia
cinética dos jatos é convertida em pressão, causando uma recuperação parcial da pressão, e
parte é dissipada em calor pela turbulência. Para captar este efeito, foi definido um plano de
refinamento posterior à placa normal ao sentido do escoamento, com uma extensão de
influência igual à extensão da recuperação da pressão, como mostrado na Figura 4.4.
Diferentes valores para oa dl , na placa com 81 orifícios, foram testados para este plano. A
extensão de influência do plano foi avaliada separadamente. Através de cálculos preliminares
foi definido que 8 do de extensão de influência seriam aplicados ao plano posterior, sendo este
posicionado a 4 do da placa. As arestas dos elementos fora do plano de refinamento foram
multiplicadas pelo fator de expansão 1,2 até alcançarem o tamanho dos elementos das regiões
vizinhas.
Próximo às paredes, ocorre grande parcela da perda de carga em escoamentos através de
placas perfuradas devido à tensão e área superficial elevadas. Para capturar melhor os efeitos
do escoamento próximo a parede foi usada o recurso da inflação, que gera um número de
camadas de malha extrudada que apresentam alta razão de aspecto em relação ao sentido
normal à parede, como mostrado anteriormente na Figura 2.10. A malha próxima à parede não
foi parametrizada em relação ao diâmetro do orifício, mas em relação à distância
adimensional à parede do primeiro elemento fora da parede ( +py ), parâmetro classicamente
usado para localizar os elementos de malha com relação à camada limite. Foram usadas 20

82
camadas de malha extrudada para capturar melhor a camada limite. Diferentes valores para +py foram avaliados através de simulações na placa perfurada com 81 orifícios. Como a
avaliação da malha próxima à parede esta atrelada ao modelo de turbulência e à modelagem
aplicada, esta característica de malha foi estudada juntamente com os modelos de turbulência,
como descrito na seção 4.3. Para os estudos descritos nesta seção foi utilizado um +py igual a
30 para todas as simulações.
A influência de cada parâmetro de malha foi estudada isoladamente, executando-se as
simulações na seqüência apresentada na matriz de testes da Tabela IV.3, de forma que apenas
um parâmetro era avaliado em cada conjunto de simulações. Os valores escolhidos para testes
na tabela representam divisões angulares inteiras da seção circular, sendo o maior valor
referente à divisão angular mínima, de 18º, capaz de manter a semelhança geométrica entre a
malha e a geometria original. A seqüência nas quais as simulações foram realizadas se baseou
no pressuposto que o escoamento adiabático estudado é preponderantemente parabólico,
sendo assim, um ponto do escoamento é muito pouco influenciado pelos eventos que ocorrem
à jusante dele. Assim, as simulações avaliando a malha na placa perfurada foram executas
antes daquelas que avaliaram a malha após a placa. Somente após ter uma malha definida
para estas regiões, foi realizada uma análise da malha próxima a parede.
Tabela IV.3 – Matriz de simulações realizadas na placa perfurada com 81 orifícios.
Parâmetro de malha avaliado oa dl na placa perfurada oa dl após a placa
0,156
0,105
0,079
0,052 oa dl na placa
0,035
0,12
0,44
0,22
0,17 oa dl após a placa *
0,07
* Valor a ser escolhido após o estudo da malha na placa perfurada.

83
Após as simulações com a placa de 81 orifícios, nas condições de máxima vazão experimental
(maior Reynolds) para a definição da malha otimizada, outras simulações foram realizadas
nas demais condições experimentais para melhor avaliar a extensão de influência do
refinamento aplicado após a placa.
Para obter uma relação entre o número de orifícios e a extensão da recuperação de pressão
após a placa perfurada foram simulados os escoamentos através de uma placa perfurada com
225 orifícios, por apresentar o mesmo número de orifícios da placa do BP, e de uma placa
com 121 orifícios, por apresentar um número de orifícios intermediário. Ambas as placas
apresentaram orifícios circulares uniformemente distribuídos (11x11 e 15x15), f = 0,43065,
igual ao da placa do BP, lado igual a 229,5 mm e espessura de placa de 20 mm. Os demais
parâmetros geométricos de interesse são apresentados na Tabela IV.4. Ambas as placas foram
simuladas na condição experimental de maior Reynolds.
Tabela IV.4 – Características geométricas das placas perfuradas simuladas.
Número de orifícios Diâmetro [mm] Passo [mm]
121 15,45 20,86
225 11,33 15,30
Os parâmetros de malha foram avaliados através da comparação dos perfis de velocidade e
intensidade turbulenta em planos transversais ao escoamento, e da comparação do perfil de
pressão ao longo do canal. Os valores quantitativos de perda de carga foram avaliados
comparando os resultados numéricos com os obtidos através da metodologia analítica de
Idelchik (1960).
4.2.2. Estudo de malha no direcionador de fluxo
O direcionador de fluxo de um BP é composto de um bocal em forma de tubo ligado a uma
placa com seção quadrada que é por sua vez unida a quatro cantoneiras, como mostrado na
Figura 4.6. A placa apresenta quatro rasgos em foram de meia-lua e quatro orifícios. Os
orifícios da placa foram bloqueados na simulação experimental e na numérica, pois no reator

84
estes orifícios guiam o posicionamento do bocal à placa inferior do núcleo do reator, não
havendo escoamento através deles. Os rasgos são feitos na placa para aumentar a área livre de
escoamento e assim reduzir a perda de carga provocada pela mesma. Para as simulações do
direcionador de fluxo foi usado o mesmo sistema de eixos de coordenadas apresentado na
Figura 4.1, com origem no plano posterior, plano x-y, da placa perfurada com 20 mm de
espessura que é posicionada logo após o direcionador.
Detalhe E Detalhe H
ddfedf
a) b)
cdfCdf
Detalhe E Detalhe H
ddfedfedf
a) b)
cdfcdfCdfCdf
Figura 4.6 – Direcionador de fluxo real (a) e o simulado com simplificações (b).
Para simular a geometria do direcionador de fluxo do BP foram necessárias algumas
simplificações, como a eliminação de arredondamentos e chanfros mostrados em detalhe na
Figura 4.6, devido a problemas na geração de malha para regiões que apresentam pequenos

85
ângulos. Avalia-se, a priori, que estas simplificações terão pouco impacto nos resultados por
serem pequenas alterações paralelas ao escoamento. A Tabela IV.5 apresenta alguns valores
dimensionais característicos do direcionador. O lado do direcionador é o mesmo da placa
perfurada, 229,5 mm.
Tabela IV.5 – Características geométricas do direcionador de fluxo.
Característica Valor [mm]
ddf 195
edf 15
cdf 145
Cdf 215
A geração de malha no direcionador de fluxo foi parametrizada pelo diâmetro do bocal
direcionador (ddf) através da relação dfa dl (comprimento de aresta do elemento da malha /
diâmetro do bocal direcionador).
Para capturar melhor os altos gradientes de velocidade e pressão no bocal direcionador e nos
rasgos de meia-lua, onde ocorrem rápidas contrações e expansões, foi definido um plano de
refinamento de malha normal ao sentido de escoamento, no centro do direcionador de fluxo
com extensão de influência igual à Cdf, e um ponto de refinamento de malha no centro do
rasgo com extensão de influência igual à edf, como mostrado na Figura 4.7.
Ponto de refinamento no rasgo
Plano de refinamento no direcionador de fluxo
A
A
Seção A-A
Figura 4.7 – Refinamento no direcionador de fluxo.
Região simulada

86
A matriz de simulações mostrada na Tabela IV.6 foi executada. Primeiramente, foi avaliada a
malha do direcionador de fluxo como um todo e posteriormente estudada a necessidade de um
refinamento de malha especifico para os rasgos. Os elementos fora do plano de refinamento
foram multiplicados pelo fator de expansão 1,2 até alcançarem o tamanho dos elementos das
regiões vizinhas. Em todas as simulações realizadas, próximo às paredes foram usadas 20
camadas de malha extrudada (inflação) e definido o valor 30 para +py .
Tabela IV.6 – Matriz de simulações realizadas no direcionador de fluxo.
Parâmetro de malha avaliado dfa dl no direcionador de fluxo dfa dl no rasgo
0,082 0,0820
0,041 0,0410
0,021 0,0210 dfa dl no direcionador de fluxo
0,011
0,005
0,0110
0,0050
0,0050 dfa dl no rasgo *
0,0025
* Valor a ser escolhido após o estudo da malha no direcionador de fluxo.
4.3. Estudo de modelos de turbulência
Definidos os parâmetros de malha, foi necessário definir o modelo de turbulência adequado
para a solução do problema. Devido ao grande custo computacional envolvido na simulação
do BP, neste trabalho, foram solucionadas as equações RANS usando os modelos de
viscosidade turbulenta com duas equações de transporte k-ε, k-ω e SST.
Como a maior parcela da perda de carga no BP é devida à placa perfurada, é essencial que sua
geometria seja bem simulada. Assim sendo, o estudo da influência de modelos de turbulência
sobre os resultados da simulação se restringiu à geometria da placa, por ser considerada mais
importante do que aquela do direcionador de fluxo.

87
As malhas usadas para a avaliação dos modelos de turbulência apresentaram os parâmetros
ótimos de malha para a placa perfurada e região posterior à placa definidos através do estudo
de malha descrito anteriormente. Como a formulação próxima de parede é acoplada ao
modelo de turbulência no CFX, a placa perfurada foi simulada em duas malhas para todos os
modelos testados. Dois valores para +py foram testados: 30 e 2, valores recomendados para os
modelos que usam ε e ω em suas formulações, respectivamente. Todas as simulações foram
realizadas para a condição de escoamento com o maior número de Reynolds, por ser esta a
condição mais restritiva do ponto de vista da turbulência.
Os resultados numéricos foram avaliados qualitativamente comparando os perfis de
velocidade, intensidade turbulenta e pressão. Os valores quantitativos de perda de carga,
definidos como a diferença de pressão entre a entrada e saída do domínio de solução subtraído
o valor de perda de carga correspondente ao atrito no canal, foram avaliados comparando os
resultados numéricos com aqueles obtidos através da metodologia analítica de Idelchik
(1960).
4.4. Análise de geometrias e condições presentes nos experimentos no BP
Para que uma simulação numérica tenha êxito em prever os fenômenos que ocorrem em um
escoamento real, é essencial que as condições de contorno e a geometria simulada reflitam o
mais fielmente possível as condições observadas no experimento. Certas condições e detalhes
geométricos presentes nos experimentos podem exigir refinamentos localizados de malha que
aumentam significativamente o custo computacional da simulação numérica tornando-a
muitas vezes inviável. Para que se possa fazer a melhor representação possível do sistema real
é necessário, então, avaliar os efeitos destas condições e geometrias no escoamento. Muitas
vezes, para viabilizar uma simulação é necessária a remoção completa de alguns detalhes ou
condições. Neste caso, é imprescindível estimar a magnitude e tendência dos erros que são
inseridos nos resultados devido às simplificações no modelo numérico.
No estudo do escoamento no bocal, a influência das seguintes condições e geometrias
presentes nos experimentos foram avaliadas: chanfro nos orifícios da placa perfurada; folga

88
entre o BP e o canal de escoamento, e a geometria que antecede a seção de testes, que impõe
condição de contorno não uniforme na entrada da seção de testes. Cada uma destas condições
é tratada separadamente nas seções seguintes.
4.4.1. Chanfros nos orifícios da placa perfurada
A placa perfurada do BP apresenta chanfros nas extremidades dos orifícios que, de acordo
com Spearman et al. (1996), reduz a perda de carga e o comprimento de recuperação de
pressão após a placa. Para estudar o efeito destes chanfros no escoamento através da placa
perfurada do BP, foram feitas simulações na placa perfurada com 225 orifícios, descrita
anteriormente na Tabela IV.4 da seção 4.2.1. Esta placa foi escolhida para esse estudo por
apresentar o mesmo número de orifícios da placa do BP.
A placa perfurada com 225 orifícios foi simulada com e sem chanfros de 1 mm de
profundidade e 45º de inclinação em ambas as extremidades dos orifícios, como os da placa
perfurada do BP.
As malhas geradas para este estudo foram determinadas segundo os parâmetros ótimos
definidos no estudo de malha descrito na seção 4.2.1. O modelo de turbulência k-ε foi usado
nas simulações. A condição de escoamento usada foi a de maior número de Reynolds para
ambas as simulações por ser mais restritiva do ponto de vista da turbulência.
Os resultados numéricos foram avaliados comparando os perfis de velocidade e intensidade
turbulenta em cotas de interesse, os perfis de pressão ao longo do canal e os valores
quantitativos de perda de carga.
4.4.2. Folga entre o canal de escoamento e o BP
O canal de escoamento experimental foi confeccionado com a seção transversal um pouco
maior que a seção transversal do BP para facilitar sua inserção. Não foi possível simular
numericamente esta folga, devido ao enorme peso computacional provocado pela relação

89
elevada entre a largura da folga e o comprimento da região onde ela está presente. A largura
exata do afastamento entre o BP e o canal não foi medida durante os experimentos. Estima-se,
com base nos projetos de construção do canal, que esta folga apresentou um valor entre ~0,25
mm e ~0,63 mm.
Para avaliar a influência da folga na perda de carga medida do BP foi simulado o escoamento
através de uma placa perfurada com 81 orifícios em canal com folga igual à maior folga
possível estimada presente nos experimentos, 0,63 mm. Esta placa foi usada para reduzir o
custo computacional das simulações e possibilitar que uma malha suficientemente fina (25
camadas de elementos de malha) fosse gerada na região da folga. Os mesmos parâmetros
ótimos de malha definidos no estudo de malha com a placa de 81 orifícios sem a folga foram
adotados na simulação. O modelo de turbulência k-ε foi usado nas simulações. Os resultados
obtidos na simulação da placa perfurada com a folga foram comparados com os resultados
obtidos com a placa sem a folga.
Para verificar o grau de erro provocado pela ausência da folga na simulação, foi realizada uma
simulação na placa perfurada com 81 orifícios sem a folga empregando uma compensação na
vazão relativa à diferença de área entre a seção de testes experimental e numérica. A condição
de escoamento usada, em todas as simulações, foi a de maior número de Reynolds.
Os resultados numéricos foram avaliados comparando os perfis de velocidade e intensidade
turbulenta, os perfis de pressão ao longo do canal e os valores quantitativos de perda de carga.
4.4.3. Geometria que antecede a seção de testes
A geometria que antecede a seção de testes é constituída de um duto circular seguido de duas
curvas de 90º, uma expansão com mudança para seção quadrada e um retificador de fluxo
com uma tela fina em sua saída, para retenção de particulados, como mostrado na Figura 4.8.
Esta geometria que antecede a seção de testes define condições de escoamento na entrada na
seção de testes cujos efeitos na medida da perda de carga através do BP devem ser avaliados.

90
Para avaliar a influência da geometria que antecede a seção de testes na perda de carga através
do BP, uma placa perfurada com 81 orifícios foi simulada usando como condição de entrada o
escoamento proveniente da geometria pré-seção de testes.
Seção de testes
Retificador de fluxo
Tela
Seção de testes
Retificador de fluxo
Tela
Figura 4.8 – Geometria que antecede a seção de testes.
Devido à complexidade desta geometria, que impossibilita de modelá-la em simetria de um
quarto ou de um oitavo, um grande esforço computacional é exigido na sua simulação. Para
reduzir este esforço, foi feita a simulação da placa com 81 orifícios ao invés do BP. Além
disto, o escoamento através da geometria que antecede a seção de testes (Figura 4.8) foi
simulado e, em uma simulação subseqüente, os perfis de velocidade e turbulência na saída do
retificador obtidos nesta primeira simulação foram usados como condição de entrada para a
simulação da seção de testes com a placa perfurada com 81 orifícios.
Apesar dessa simplificação, essa geometria complexa continuou dificultando muito a
simulação, exigindo mais simplificações na modelagem. Foi então removida a tela posterior
ao retificador de fluxo, devido à pequena espessura do fio (0,8 mm) e considerado como
canais quadrados os espaços entre os tubos. O impacto da remoção da tela é grande, posto que
a tela intensifica a mistura turbulenta após o retificador contribuindo para a homogeneização
do escoamento. Deste modo, presume-se que a geometria simulada representou o pior cenário

91
possível em termos do perfil de velocidades. Detalhes da geometria simulada podem ser
vistos na Figura 4.9.
Figura 4.9 – Detalhes e cotas da geometria simulada.
A malha gerada para a simulação da geometria que antecede a seção de testes apresentou um
comprimento de elemento igual a 14,34 mm para os dutos circulares, refinamentos locais na
região do retificador com elementos de 2 mm e na região posterior ao retificador com
elementos de 5 mm por uma extensão de 160 mm. Foram usadas 5 camadas de elementos
Condicionador de fluxo

92
prismáticos (malha extrudada - inflação) próximas às paredes e +py igual a 30. A malha para a
seção de testes apresentou os parâmetros especificados no estudo de malha. Ambas as
simulações foram realizadas com o modelo de turbulência k-ε e para a condição de
escoamento com maior número de Reynolds.
Foram também realizadas simulações do escoamento na seção de testes com a placa perfurada
de 81 orifícios aplicando um perfil uniforme de velocidade e diferentes valores para a
intensidade turbulenta na entrada da seção de testes. Foram simuladas as intensidades
turbulentas de 1, 5 e 10%. Os resultados destas simulações foram comparados às simulações
anteriores obtidos com condições de entrada na seção de testes calculadas previamente
considerando a geometria de entrada.
Os resultados numéricos foram avaliados comparando os perfis de velocidade e intensidade
turbulenta, os perfis de pressão ao longo do canal e os valores quantitativos de perda de carga.
4.5. Validação através de comparação a valores experimentais
O escoamento através do BP foi então simulado, em cada uma das condições experimentais,
aplicando-se os parâmetros de malha, modelos de turbulência, simplificações e condições de
contorno definidos nos estudos realizados.
Os resultados numéricos foram avaliados comparando os perfis de velocidade e intensidade
turbulenta em cotas de interesse, os perfis de pressão ao longo do canal obtidos para cada
condição de escoamento simulada. Os resultados quantitativos de perda de carga numérica
foram comparados aos valores obtidos nos experimentos. Espera-se, através destas
comparações, validar a metodologia numérica permitindo que esta seja aplicada em
simulações de novas geometrias de BPs, auxiliando assim no desenvolvimento de novos
elementos combustíveis nucleares.

93
4.6. Resumo das simulações realizadas
As Tabelas IV.7, IV.8, IV.9 e IV.10 resumem a seqüência de simulações apresentadas neste
capítulo.
Tabela IV.7 – Resumo das simulações do estudo de malha.
Características comuns: Modelo de turbulência k-ε, simetria de 1/8 e +py igual a 30.
Refinamento Geometria Local Aresta do elemento Extensão
Reynolds
Placa 0,035 ≤ oa dl ≤ 0,156 20 mm
0,07 ≤ oa dl ≤ 0,044 8 do 998.184
Placa perfurada com 81 orifícios Após a placa
* 8 e 13 do 111.847 a 998.184
Placa * 20 mm Placa perfurada com 121 e 225
orifícios Após a placa * *
Direcionador 0,005 ≤ dfa dl ≤ 0,082 215 mm Direcionador de fluxo Rasgo 0,0025 ≤ dfa dl ≤ 0,005 30 mm
998.184
* Valor definido no estudo de malha na placa perfurada.
Tabela IV.8 – Resumo das simulações do estudo de modelos de turbulência.
Características comuns: Simetria de 1/8, Reynolds igual a 998.184 e oa dl nos planos de refinamento definidos no estudo de malha em placas perfuradas.
Geometria Modelos de turbulência +py
k-ε 2, 10, 15 e 30
k-ω 2 e 30 Placa perfurada com 81 orifícios
SST 2 e 30

94
Tabela IV.9 – Resumo das simulações para análise de geometrias e condições presentes nos
experimentos no BP.
Características comuns: Modelo de turbulência k-ε, Reynolds igual a 998.184 e +py = 2.
Condição
geométrica Geometria Malha Condições de entrada Simetria
Chanfros em ambas as extremidades dos
orifícios
Placa perfurada com 225 orifícios
(chanfros de 1 mm)Ótima* Perfil de velocidades
uniforme e 5% de I 1/8
Folga entre o BP e o canal
Placa perfurada com 81 orifícios
(folga de 0,63 mm)
Ótima*
25 camadas de malha na
folga
Perfil de velocidades uniforme e 5% de I 1/8
Curvas e retificador
Valores específicos**
( +py = 30)
Perfil de velocidades uniforme e 5% de I
Perfil de velocidades uniforme e 1, 5 e 10 %
de I
Geometria que antecede a seção de
testes Seção de testes com placa
perfurada com 81 orifícios
Ótima* Perfil de velocidades e I retirados da
simulação com as curvas e retificador
1/2
* Valores definidos no estudo de malha em placas perfuradas. ** Valores definidos na Seção 4.4.3.
Tabela IV.10 – Resumo das simulações para a validação através de comparação a valores
experimentais.
Características comuns: Malha ótima*, simetria de 1/8 e +py = 2.
Modelo de Turbulência Reynolds
k-ε
SST 111.847 a 998.184
* Valores definidos no estudo de malha em placas perfuradas e no direcionador de fluxo.

95
5. RESULTADOS E DISCUSSÃO
5.1. Resultados experimentais
As medições da perda de carga através do Bocal inferior Padrão (BP) foram realizadas no
Circuito Hidrodinâmico do Reator (CHR) do Centro Tecnológico da Marinha (CTMSP)
conforme descrito na metodologia experimental. Foram estabelecidos cinco níveis de vazão
correspondendo à faixa de Reynolds de 111.847 a 998.184, em intervalos de ~200.000,
calculado com base no lado e velocidade média na seção transversal do inicio da seção de
testes. As condições do escoamento nas quais os experimentos foram realizados e as
respectivas incertezas de medição são apresentadas na Tabela V.1.
Tabela V.1 – Condições experimentais.
Vazão [kg/s]* Pressão
[kPa]*
Temperatura
[oC]*
Massa específica
[kg/m3]*
Viscosidade
10-4 [m2/s]*
Re*
16,73 ± 2,3% 53 ± 7,7% 40,1 ± 5,2% 992,201 ± 0,1% 6,518 ± 3,8% 111847 ± 5%
49,70 ± 1,0% 104 ± 3,9% 40,9 ± 5,1% 991,914 ± 0,1% 6,421 ± 3,8% 337263 ± 4%
82,51 ± 1,0% 193 ± 2,1% 41,4 ± 5,0% 991,758 ± 0,1% 6,362 ± 3,7% 565109 ± 4%
115,52 ± 0,9% 348 ± 1,2% 40,2 ± 5,2% 992,292 ± 0,1% 6,506 ± 3,8% 773724 ± 4%
115,08 ± 0,9% 354 ± 1,2% 55,9 ± 3,7% 985,409 ± 0,1% 4,969 ± 3,8% 998184 ± 4%
*Incerteza global - % do valor
Diferenças de pressão foram medidas entre a tomada de pressão (Tap) 2 e as tomadas 4, 5, 6 e
7, apresentadas na Figura 3.6 e reapresentadas na Figura 5.1. As medições das tomadas 1 e 3
foram excluídas do estudo devido à alta dispersão apresentada..
A Tabela V.2 apresenta os valores obtidos para as diferenças de pressão experimentais e suas
respectivas incertezas. As incertezas e valores apresentados na Tabela V.2 foram os obtidos
com o transmissor de pressão que apresentou a menor incerteza dentre os utilizados em cada
medição. Como esperado, as maiores incertezas foram observadas para as condições de
escoamento de menor vazão.

96
Figura 5.1 – Posição das tomadas de pressão.
Tabela V.2 – Diferenças de pressão medidas através do BP.
Vazão [kg/s]
16,73 49,7 82,51 115,52 115,08
Diferença de pressão [Pa] Tomada
δ* = ± 7% δ* = ± 3% δ* = ± 1% δ* = ± 1% δ* = ± 1%
2-4
2-5
2-6
2-7
60
210
150
140
56
1920
1430
1400
1380
5020
3750
3640
2770
9720
7270
7170
2670
9490
7120
6990
* Incerteza global - % do valor
A Figura 5.2 apresenta a perda de pressão em função do número de Reynolds (a) e da vazão
(b). As curvas de tendência apresentadas na Figura 5.2 e demais figuras da seção 5.1 foram
obtidas por ajuste de curvas para os dados experimentais. A Figura 5.2 (a) mostra a tendência
crescente de aumento da perda de pressão somente quando a mudança do número de
Reynolds está associada à alteração na vazão. Mantida a vazão aproximadamente constante,
porém com aumento na temperatura da água, atingiu-se Reynolds maiores sem variação

97
significativa da perda de carga (condição de Reynolds entre 773.724 e 998.184). A Figura 5.2
(b) mostra um aumento crescente da perda de carga em função da vazão em todas as posições
medidas.
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
0 200000 400000 600000 800000 1000000Re
Dife
renç
a de
Pre
ssão
- D
P [P
a]
24252627
Tomadas de pressão
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
0 20 40 60 80 100 120Vazão [kg/s]
Dife
renç
a de
Pre
ssão
- D
P [P
a]
24252627
Tomadas de pressão
Figura 5.2 – Diferenças de pressão entre as tomadas em função de Reynolds (a) e da vazão (b)
para o BP.
a)
b)

98
Na Figura 5.3 é possível observar com clareza o comportamento da pressão ao longo do canal.
É observado que o comprimento de recuperação da pressão ocorre, para todas as condições de
escoamento testadas, entre 42 mm (Tap 5) e 152 mm (Tap 6). Não foi possível observar o
ponto exato do término da recuperação da pressão devido ao número reduzido de pontos de
medida.
0,975
0,98
0,985
0,99
0,995
1
1,005
0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 1,1Z [m]
P / P
ref
Bocal
Placa perfurada
Re = 111847
Re = 337263
Re = 565109
Re = 773724
Re = 998184
Figura 5.3 – Comportamento da pressão ao longo do canal com o BP.
Os coeficientes de perda de carga global foram obtidos através da relação 22 iBP upK ρΔ= .
O BPpΔ foi considerado como sendo a diferença de pressão entre as tomadas 2 e 7. A
velocidade média no sentido do escoamento, iu , foi calculada para a área livre do canal com
lado igual a 0,23 m. Os valores dos coeficientes de perda de carga e suas respectivas
incertezas são apresentados na Figura 5.4 em função do número de Reynolds. Não está bem
caracterizada a tendência de redução do coeficiente de perda de carga com o número de
Reynolds, prevista na literatura (Tong e Weisman, 1970), provavelmente devido às maiores
incertezas globais das medições da perda de pressão nas vazões, ou Reynolds, mais baixos.
Uma curva ajustada por regressão linear através dos dados experimentais mostra tendência a

99
um valor constante para o coeficiente. O valor médio estimado para o K27 obtido nos
experimentos foi de 2,96 ± 5,5%.
2
2,2
2,4
2,6
2,8
3
3,2
3,4
3,6
3,8
4
50000 250000 450000 650000 850000 1050000Re
K27
Figura 5.4 – Coeficiente de perda de carga (K27) em função de Reynolds para o BP.
5.2. Resultados numéricos
5.2.1. Estudo de malha em placas perfuradas
Foram realizadas simulações na placa perfurada com 81 orifícios para determinar os melhores
parâmetros adimensionais de malha, oa dl (comprimento de aresta / diâmetro do orifício),
nos planos de refinamento definidos na placa perfurada e após a placa como exemplificado na
Figura 5.5. Além disto, foram realizadas simulações para determinar a extensão de influência
adequada para o plano de refinamento após a placa. O modelo de turbulência k-ε foi aplicado
em todos os casos simulados. A seguir são apresentados e discutidos os resultados obtidos
segundo metodologia descrita no Capítulo 4.
K27 = 2,95 + 2x10-8 Re R2 = 0,0047

100
Extensão de influência do refinamento após a placa
Refinamento placa
Refinamento após a placa
Figura 5.5 – Planos de refinamento na placa perfurada.
Dimensão oa dl no plano de refinamento da placa perfurada
Para determinar o valor ótimo para a relação adimensional de aresta dos elementos de malha
oa dl no plano de refinamento da placa perfurada, foram realizadas as simulações com
valores de oa dl de 0,035 a 0,156, na região da placa e de 0,12 na região a jusante da placa
conforme descrito na Tabela IV.3 da metodologia numérica para a placa perfurada com 81
orifícios. A condição de escoamento com o maior número de Reynolds obtido
experimentalmente, Re = 998.184, foi usada em todas as simulações realizadas.
A Tabela V.3 apresenta os valores de perda de carga encontrados numericamente comparados
ao valor IpΔ = 9230 Pa, obtido através da metodologia analítica de Idelchik (1960). Os
valores de perda de carga numérica representam a diferença de pressão entre a entrada (710
mm a montante da placa) e saída (700 mm a jusante da placa) do domínio descontada à perda
de carga devida ao atrito nas paredes do canal de escoamento, igual a 275,83 Pa. Na tabela é
observado que a partir de um oa dl igual a 0,105, o valor da perda de carga já está
satisfatoriamente próximo ao valor de referência. É mostrado que a cada refinamento o valor
numérico para a perda de carga cai e que o valor correto, em princípio para oa dl <<< 0,035,
tende a ser menor que a referencia Idelchik (1960). Outro dado importante é que há um
grande aumento no número de elementos da malha com a redução do oa dl na placa.

101
Tabela V.3 – Perda de carga para diferentes malhas na placa perfurada.
oa dl na placa
perfurada
Número de
elementos da malha CFXpΔ [Pa]
( )I
ICFXp
ppΔ
Δ−Δ [%]
0,156 521.232 10067 9,08
0,105 1.146.743 9278 0,53
0,079 1.424.666 9239 0,10
0,052 2.249.398 9166 -0,69
0,035 4.718.882 9049 -1,96
A taxa com que cada novo refinamento influencia o valor da perda de carga obtida com
relação ao aumento de malha provocado pode ser melhor analisada através da Tabela V.4. Na
tabela é apresentado o fator de ganho da malha (FGM), que é a razão entre a variação
percentual do CFXpΔ e a variação percentual do número de elementos de malha multiplicado
por 100. O parâmetro FGM foi usado para facilitar a interpretação dos resultados de perda de
carga em relação ao aumento provocado na malha, fornecendo uma quantificação da razão
entre beneficio e custo computacional. Um valor de FGM >> 1 indica uma variação
significativa da perda de carga com o refinamento empregado, um FGM ~ 1 indica variação
pouco significativa da perda e um FGM < 1 indica variação não significativa da perda de
carga.
Tabela V.4 – Benefícios de novos refinamentos na placa perfurada.
Mudança de oa dl Incremento % na malha Mudança % no CFXpΔ FGM
0,156 → 0,105 120,01 -7,84 6,53
0,105 → 0,079 24,24 -0,42 1,75
0,079 → 0,052 57,89 -0,79 1,36
0,052 → 0,035 109,78 -1,28 1,17
O FGM apresentado na Tabela V.4 mostra que há pouca variação nos resultados com relação
ao aumento do número de elementos de malha para valores de oa dl menores que 0,105.

102
A perda de carga global não deve ser o único parâmetro usado para avaliar o refinamento.
Pequenas diferenças presentes na estrutura do escoamento através dos orifícios de placas
perfuradas podem provocar grande alteração na perda de carga prevista, principalmente em
placas com um número elevado de orifícios como a placa do BP. Pelos resultados de perda de
carga pode-se concluir, erroneamente, que uma malha com oa dl igual a 0,105 já fornece
resultados satisfatórios na simulação.
A Figura 5.6 apresenta o comportamento da pressão estática em relação à pressão estática de
referência do sistema ao longo da linha central do canal. A figura mostra que somente as
simulações com malhas apresentando oa dl menor ou igual a 0,079 fornecem um perfil de
pressão similar na região da placa perfurada.
0,9550,96
0,9650,97
0,9750,98
0,9850,99
0,9951
1,005
-0,06 -0,04 -0,02 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14Z [m]
P / P
ref
0,0350,0520,0790,1050,156
l a /d o :
Placa perfurada
Figure 5.6 – Pressão ao longo do canal para diferentes malhas na placa perfurada.
A Figura 5.7 apresenta os contornos da componente de velocidade no sentido do escoamento
(Vz) no plano central do orifício central da placa perfurada para os refinamentos avaliados. É
possível verificar que apenas as malhas com oa dl menor ou igual a 0,079 capturam o
descolamento do escoamento na entrada do orifício, caracterizado pelas velocidades negativas
próximas à parede.

103
0,035 0,052 0,079 0,105 0,156 Vzoa dl
Figura 5.7 – Contornos da componente de velocidade Vz na entrada do orifício central da
placa perfurada com 81 orifícios para diferentes oa dl .
A Figura 5.7 mostra que malhas com valores de oa dl menores capturam melhor o
descolamento nos orifícios da placa. Este comportamento foi quantificado através dos perfis
de velocidade adimensional no sentido do escoamento ( médio zz VV ) e intensidade turbulenta
(I) em duas posições distintas do orifício central da placa perfurada apresentados na Figura
5.8.
Os perfis de velocidade adimensional e de intensidade turbulenta apresentados para os
diferentes refinamentos de malha na posição 1 da Figura 5.8 mostram grandes diferenças, nas
proximidades da parede onde ocorre sensível aumento na turbulência e descolamento do
escoamento. Na posição 2 (18 mm após a entrada do orifício) os perfis de velocidade e
turbulência para as malhas com oa dl 0,052 e 0,035 são muito similares. Embora a
independência de malha ainda não tenha sido obtida para os valores oa dl avaliados, as
diferenças entre os perfis com malhas com oa dl ≤ 0,052 podem ser consideradas aceitáveis.
z

104
Ro = 18,88 mm
Posições traçadas: 1 2
Plano central
zy
2 mm 2 mm
0,0350,0520,0790,1050,156
l a /d o :
0
0,05
0,1
0,15
0,2
0,25
0 0,2 0,4 0,6 0,8 1y / R o
I
0
0,05
0,1
0,15
0,2
0,25
0 0,2 0,4 0,6 0,8 1y / R o
I
Posição 2
Posição 1
00,5
11,5
22,5
3
0 0,2 0,4 0,6 0,8 1y / R o
Vz /
Vz m
édio
-0,6
0,4
1,4
2,4
3,4
0 0,2 0,4 0,6 0,8 1y / R o
Vz /
Vz m
édio
Figura 5.8 – Perfil de velocidades do escoamento 2 mm após a entrada no orifício (Posição 1)
e na saída do orifício (Posição 2) da placa perfurada com 81 orifícios.
O valor 0,052 para oa dl no plano de refinamento da placa perfurada foi então adotado uma
vez que apresenta resultados numéricos satisfatórios a um custo computacional aceitável.
Uma malha com oa dl igual a 0,035 na placa poderia fornecer resultados ainda melhores,
entretanto, com custo computacional adicional devido ao aumento de 109,78% na dimensão
da malha (Tabela V.4). Esta relação de oa dl tornaria inviável a simulação de placas
perfuradas com um número elevado de orifícios, como a do BP.

105
A Figura 5.9 mostra, em corte longitudinal e transversal, a malha em um orifício gerada com
oa dl no plano de refinamento da placa perfurada igual a 0,052.
Figura 5.9 – Detalhe da malha em um orifício da placa perfurada com 81 orifícios.
Dimensão oa dl no plano de refinamento após a placa perfurada
Para determinar a melhor relação oa dl no plano de refinamento após a placa perfurada
(mostrado na Figura 5.5), foram realizadas cinco simulações utilizando valores de oa dl de
0,07 a 0,44 na placa perfurada com 81 orifícios conforme descrito na metodologia numérica.
No plano de refinamento localizado na placa perfurada foi usado oa dl igual a 0,052,
conforme definido na seção anterior.
A Tabela V.5 apresenta os valores de perda de carga encontrados numericamente comparados
ao valor IpΔ = 9230 Pa, obtido através da metodologia analítica Idelchik (1960). Os valores
de perda de carga numérica representam a diferença de pressão entre a entrada e saída do
domínio descontada à perda de carga devido ao atrito nas paredes do canal de escoamento,
igual a 276 Pa.
A A
SeçãoA-A

106
Tabela V.5 – Perda de carga para diferentes malhas após a placa perfurada.
oa dl após a placa Número de elementos da malha CFXpΔ [Pa] ( )
I
ICFXp
ppΔ
Δ−Δ [%]
0,44 1.569.150 9165 -0,70
0,22 1.667.777 9152 -0,84
0,17 1.792.172 9162 -0,73
0,12 2.249.398 9166 -0,69
0,07 4.985.691 9156 -0,80
Os valores apresentados na Tabela V.5 mostram que não há alteração significativa na perda de
carga calculada à medida que a malha é refinada. A taxa com que cada novo refinamento
influencia no valor da perda de carga obtida com relação ao aumento de malha provocado
pode ser melhor analisada através da Tabela V.6, onde é mostrado o FGM, razão entre a
variação percentual em CFXpΔ e a variação percentual do número de elementos de malha
multiplicado por 100.
Tabela V.6 – Benefícios de novos refinamentos posteriores à placa perfurada.
Mudança de oa dl Incremento % na malha Mudança % no CFXpΔ FGM
0,44 → 0,22 6,29 -0,14 2,20
0,22 → 0,17 7,46 0,11 1,45
0,17 → 0,12 25,51 0,05 0,20
0,12 → 0,07 121,65 -0,11 0,09
A Tabela V.6 mostra que reduções de oa dl para valores menores que 0,17 não promovem
reduções sensíveis na relação FGM.
A Figura 5.10 apresenta o comportamento da pressão estática, em relação à pressão estática
de referência do sistema, Pref, ao longo da linha central do canal. Nota-se um aumento no
comprimento de recuperação de pressão após a placa perfurada com o aumento do
refinamento da malha. Isto é uma indicação de que não foi obtida uma independência total de

107
malha, mas que este comportamento em pouco influi na perda de carga, variável de interesse
do estudo.
0,9550,96
0,9650,97
0,9750,98
0,9850,99
0,9951
1,005
-0,06 -0,04 -0,02 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14Z [m]
P / P
ref
0,070,120,170,220,44
l a /d o :Placa perfurada
Figure 5.10 – Pressão ao longo da linha central do canal para diferentes malhas após a placa
perfurada.
A Figura 5.11 apresenta os contornos da componente de velocidade Vz no plano central,
mostrando a região da placa perfurada e 110 mm após a mesma para as simulações realizadas.
Os jatos de fluido formados após a placa perfurada apresentam contornos disformes e pequena
extensão para malhas com a relação oa dl maior que 0,12 após a placa. Os melhores
resultados foram obtidos em malhas com oa dl após a placa menor ou igual a 0,12.

108
0,07 0,12
0,17 0,22
0,44
Vz
110 mm
10 mm 0 mm
0,07 0,12
0,17 0,22
0,44
Vz
110 mm
10 mm 0 mm
110 mm110 mm
10 mm10 mm 0 mm
Figura 5.11 – Contornos da componente de velocidade Vz na placa perfurada e saída dos
orifícios para diferentes refinamentos posteriores à placa perfurada com 81 orifícios.
O comportamento observado na Figura 5.11 foi quantificado através dos perfis de Vz
adimensional e de intensidade turbulenta em duas posições distintas após a placa perfurada
apresentadas na Figura 5.12.
Pela Figura 5.12 é possível verificar que na posição 1 (10 mm após a placa) todas as malhas
simuladas apresentam um comportamento similar. Já na posição 2 (110 mm após a placa)
quanto mais refinada a malha, mais perturbado está o escoamento. Esta maior perturbação é
refletida no comportamento da pressão ao longo do canal (Figura 5.10), tornando a
recuperação da pressão após a placa mais suave e prolongada. Apesar disto, a perda de carga
calculada para as diferentes malha apresenta somente uma pequena variação.
=oa dl
z

109
zyPlano central L / 2
0,070,120,170,220,44
l/d o :Posições traçadas: 1 2
10 mm110 mm
l a /d o :
00,050,1
0,150,2
0,250,3
0,35
0 0,2 0,4 0,6 0,8 12y / L
I
00,05
0,10,15
0,20,25
0,3
0 0,2 0,4 0,6 0,8 12y / L
I
0
0,5
1
1,5
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
-0,20,30,81,31,82,32,8
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
Posição 2
Posição 1
Figura 5.12 – Perfis de velocidade adimensional e de intensidade turbulenta após a placa
perfurada com 81 orifícios.
Analisando os resultados obtidos foi escolhido o valor de oa dl igual a 0,12 para a malha
após a placa perfurada. Este valor fornece uma boa relação entre custo computacional e
qualidade de resultados apesar de não ser um parâmetro que forneça resultados definitivos.
Resultados melhores podem ser obtidos com oa dl igual a 0,07, mas a utilização deste valor
implicaria em uma malha com o dobro de elementos (Tabela V.6) da malha obtida com
oa dl igual a 0,12.

110
A Figura 5.13 mostra, em corte longitudinal, a malha obtida na região da placa perfurada
usando oa dl igual a 0,052 e 0,12 nos planos de refinamento da placa e após a placa
respectivamente.
Figura 5.13 – Malha posterior a placa perfurada com 81 orifícios.
Extensão de influência do plano de refinamento após a placa perfurada
A placa perfurada com 81 orifícios foi simulada para todas as vazões experimentais. Na
geração da malha foram utilizados valores de oa dl iguais a 0,052 e 0,12 para os planos de
refinamento da placa perfurada e da região posterior, respectivamente. Como descrito na
metodologia numérica, o plano de refinamento após a placa perfurada foi definido com uma
extensão de influência igual a oito do ao longo do canal.

111
A Tabela V.7 apresenta os valores de perda de carga analítica ( IpΔ ), por atrito ( atritopΔ ) e
numérica ( CFXpΔ ), respectivamente. O valor da perda de carga analítica foi obtido através da
referência Idelchik (1960). As perdas de carga numérica apresentadas na tabela são as
diferenças de pressão entre a entrada (710 mm a montante da placa) e a saída (700mm a
jusante da placa) do domínio subtraído das perdas devidas ao atrito com as paredes.
Tabela V.7 – Perda de carga para diferentes condições de escoamento.
Reynolds Reynolds nos orifícios IpΔ [Pa]
atritopΔ [Pa]
CFXpΔ [Pa] ( )
I
ICFXp
ppΔ
Δ−Δ [%]
111.847 21.371 174* 7 200 15,33
337.263 64.442 1657* 54 1738 4,90
565.109 107.979 4825 146 4788 -0,77
773.724 147.840 9444 285 9365 -0,85
998.184 190.729 9230 276 9166 -0,69
* Calculado usando a metodologia Idelchik (1960) para escoamentos a números de Reynolds nos orifícios abaixo de 105.
A Tabela V.7 mostra que a malha determinada para a placa perfurada com 81 orifícios obteve
excelente concordância com a referência Idelchik (1960) para as condições de escoamento
com número de Reynolds nos orifícios maior que 105. Para condições com Reynolds menor
que 105 nos orifícios existem duas hipóteses para as diferenças observadas: ou o conjunto
malha / modelo de turbulência usado nas simulações não foi capaz de captar a mudança de
comportamento do escoamento, ou a metodologia Idelchick (1960) empregada apresenta
erros. A segunda pode explicar a ausência desta metodologia no Handbook de 1986.
A perda de carga analítica foi calculada através da metodologia Idelchik de 1986 para as
condições de escoamento com Reynolds maior que 105. Foi verificada uma diferença média
de aproximadamente -6,8% entre resultados numéricos e analíticos para todas as condições de
escoamento calculadas. Este resultado indica que a metodologia Idelchik de 1986 superestima
de forma sistemática o valor de perda de carga. Não faz parte do escopo deste estudo
aprofundar na avaliação das metodologias analíticas aplicadas ao cálculo da perda de carga
em placas perfuradas, ficando isto como sugestão de estudo para futuros trabalhos.

112
A Figura 5.14 mostra o comportamento da pressão estática em relação à pressão estática de
referência do sistema, Pref, ao longo da linha central do canal para as diferentes vazões.
0,955
0,96
0,965
0,97
0,975
0,98
0,985
0,99
0,995
1
1,005
-0,06 -0,03 0 0,03 0,06 0,09 0,12 0,15 0,18 0,21 0,24 0,27Z [m]
P / P
ref
111847337263565109773724998184
Placa perfurada
Re:
Figura 5.14 – Pressão ao longo do canal para diferentes condições de escoamento.
Os comportamentos apresentados na Figura 5.14 são similares aos observados nos
experimentos à jusante da placa perfurada do BP, mostrados na Figura 5.3.
A Figura 5.14 também mostra que a extensão da recuperação da pressão que ocorre após a
placa perfurada é similar para todas as vazões. Este fato se torna mais evidente com o auxílio
da Figura 5.15, que mostra a taxa de variação da pressão (DP) calculada em intervalos de
comprimento (DZ) de 1,4 mm ao longo da linha central do canal.

113
-500
0
500
1000
1500
2000
2500
-0,06 -0,03 0 0,03 0,06 0,09 0,12 0,15 0,18 0,21 0,24Z [m]
DP
( DZ
= 1
,4 m
m) [
Pa]
111847337263565109773724998184
Re:
Placa perfurada
-24-19-14
-9-416
0,09 0,12 0,15 0,18 0,21 0,24
Figura 5.15 – Taxas de variação da diferença de pressão entre intervalos de 0,0014 m ao
longo do canal para diferentes condições de escoamento.
A Figura 5.15 confirma que a entrada dos orifícios é a região conde ocorrem as maiores
variações de pressão, chegando a 2290 Pa de variação em apenas 1,4 mm de canal. A figura
também mostra que variações significativas de pressão ocorrem até 120 mm após a placa para
todas as condições de escoamento. Variações menores de pressão continuam até uma extensão
de 220 mm após a placa para todas as condições de escoamento exceto a condição com
Reynolds de 111.847, que já apresenta um comportamento completamente estabilizado a uma
extensão de 100 mm. A extensão de influência do plano de refinamento após a placa
perfurada foi de apenas 151,04 mm (8 diâmetros de orifício), não abrangendo toda a extensão
da recuperação de pressão para as condições de escoamento com as maiores vazões. Assim foi
necessário avaliar uma extensão de influência maior para o plano de refinamento após a placa
e a repercussão desta alteração na perda de carga medida.
Para verificar a influência da extensão do refinamento na recuperação da pressão e na perda
de carga, foi gerada uma malha com os parâmetros definidos nas seções anteriores em plano
de refinamento posterior à placa com extensão de influência igual a 13 diâmetros de orifício
(245,44 mm). A Tabela V.8 compara os resultados de perda de carga obtidos nas malhas com

114
extensão de 8 ( odCFXp8Δ ) e 13 ( od
CFXp13Δ ) diâmetros de influência no plano de refinamento após a
placa.
Tabela V.8 – Perda de carga para diferentes condições de escoamento em malhas distintas.
Reynolds odCFXp8Δ [Pa]
odCFXp13Δ [Pa]
o
oo
dCFX
dCFX
dCFX
ppp
8
138
ΔΔ−Δ
[%]
111.847 200 200 0,04
337.263 1738 1738 0,03
565.109 4788 4782 0,11
773.724 9365 9356 0,09
998.184 9166 9187 -0,23
O aumento da extensão do refinamento posterior à placa de 8 do para 13 do provocou um
aumento de 21,76% na malha, entretanto, como pode ser visto na Tabela V.8, não ocorreram
diferenças significativas nos valores de perda de carga obtidos.
A Figura 5.16 mostra a taxa de variação da pressão (DP) calculada em intervalos de
comprimento (DZ) de 1,4 mm ao longo da linha central do canal. Variações significativas de
pressão foram observadas até uma extensão de ~120 mm após a placa perfurada. As
oscilações presentes na região compreendida entre 120 e 220 mm foram em grande parte
amortecidas. O comprimento de recuperação de pressão chegou a até ~250 mm para a
condição de escoamento com Reynolds igual a 773.724. Apesar destas diferenças, o
comportamento da pressão foi similar para as condições de escoamento com Reynolds maior
que 111.847.
Para quantificar o comprimento de recuperação de pressão, assumiu-se que a recuperação se
restringe à região após a placa perfurada na qual a variação de pressão é superior a 0,1% da
perda de carga total do escoamento através da placa. Este critério foi adotado na determinação
dos comprimentos de recuperação para ambas as malhas estudadas e, como mostra a Tabela
V.9, o aumento na extensão de influência da malha de 8do para 13do não altera o
comprimento de recuperação.

115
-500
0
500
1000
1500
2000
2500
-0,06 0 0,06 0,12 0,18 0,24 0,3Z [m]
DP
( DZ
= 1
,4 m
m) [
Pa]
111847337263565109773724998184
Placa perfurada
Re:
-24-19-14
-9-416
0,09 0,12 0,15 0,18 0,21 0,24 0,27 0,3
Figura 5.16 – Taxas de variação da diferença de pressão em intervalos de 0,0014 m ao longo
do canal para diferentes condições de escoamento simuladas na malha com 13 diâmetros de
orifício de extensão de influência do plano de refinamento após a placa perfurada.
Tabela V.9 – Comprimento de recuperação da pressão.
Reynolds Comprimento de recuperação da
pressão para ambas as malhas [mm]
111.847 114 (6,0 do)
337.263 114 (6,0 do)
565.109 106 (5,6 do)
773.724 106 (5,6 do)
998.184 114 (6,0 do)
A tabela mostra ainda que, para a placa perfurada com 81 orifícios, a recuperação de pressão
ocorre a uma extensão aproximadamente constante e totalmente independente da condição de
escoamento para a faixa estudada.
Cálculos em duas outras placas perfuradas foram realizados para avaliar influências de
algumas características geométricas no comprimento de recuperação da pressão. Placas com o

116
mesmo coeficiente de área livre, mas diferentes quantidades de orifícios foram simuladas para
que se pudesse verificar as influências do diâmetro e do número de orifícios na extensão da
recuperação de pressão e na perda de carga. Os parâmetros definidos nas seções anteriores
foram adotados na geração das malhas. A extensão de influência do plano de refinamento
após a placa foi de 13 do. As placas foram simuladas apenas na condição de escoamento com
Reynolds mais elevado, 998.184. A Tabela V.10 apresenta os resultados de perda de carga
calculados pelo CFX, reduzidos do valor da perda devido ao atrito (276 Pa), comparados com
os obtidos com a placa de 81 orifícios. Na tabela os resultados são também comparados aos
obtidos através da referência Idelchik (1960).
Tabela V.10 – Perda de carga para diferentes placas perfuradas.
Número de orifícios da
placa perfurada
Número de elementos da
malha
Aumento % de malha
IpΔ [Pa]
CFXpΔ [Pa]
( )I
ICFXp
ppΔ
Δ−Δ
[%]
81 2.738.963 - 9230 9187 -0,46
121 3.147.922 14,93 8839 9086 2,79
225 7.280.108 131,27 8529 8929 4,70
Um número de orifícios maior na placa perfurada provocou um aumento extremamente
elevado do número de elementos da malha, como pode ser observado na Tabela V.10. Os
desvios das perdas de carga obtidas numericamente em relação às referências aumentam com
o aumento do número de orifícios da placa (ou diminuição do diâmetro dos orifícios).
A Figura 5.17 mostra o comportamento da pressão estática, em relação à pressão de referência
do sistema, ao longo da linha central do canal para as diversas placas. A Tabela V.10 e a
Figura 5.17 mostram que a perda de carga diminui com o aumento do número de orifícios e,
por conseqüência, com a diminuição do diâmetro dos orifícios da placa perfurada.

117
0,88
0,9
0,92
0,94
0,96
0,98
1
1,02
-0,06 -0,03 0 0,03 0,06 0,09 0,12 0,15 0,18Z [m]
P / P
ref
81121225
Placa perfurada
Orifícios:
Figura 5.17 – Pressão ao longo do canal para diferentes placas perfuradas.
A Figura 5.18 mostra a taxa de variação da diferença de pressão (DP) calculada em intervalos
de canal (DZ) de 1,4 mm ao longo da linha central do canal.
-1000-500
0500
1000150020002500300035004000
-0,06 -0,03 0 0,03 0,06 0,09 0,12 0,15 0,18Z [m]
DP
( DZ
= 1
,4 m
m) [
Pa]
81121225
Placa perfurada
Orifícios
-30-25-20-15-10
-505
10
0,08 0,1 0,12 0,14 0,16 0,18
Figura 5.18 – Diferença de pressão entre intervalos de 0,0014 m ao longo do canal para
diferentes placas perfuradas.

118
Com os dados apresentados na Figura 5.18 foram obtidos os comprimentos de recuperação
das placas simuladas, apresentados na Tabela V.11. Admitiu-se novamente que a recuperação
se restringe à região a jusante da placa perfurada onde as variações de pressão são superiores
a 0,1% da perda de carga total do escoamento através da placa.
Tabela V.11 – Comprimento de recuperação da pressão para diferentes placas perfuradas.
Número de
orifícios Comprimento de recuperação da pressão [mm] Redução % do comprimento
81 114 (6,0 do) -
121 91 (5,9 do) 20,18
225 76 (6,7 do) 16,48
Os resultados apresentados na Tabela V.11 indicam que a extensão da recuperação de pressão
após a placa perfurada diminui à medida que o número de orifícios aumenta e os diâmetros
dos orifícios são reduzidos. Outro fato observado é que, para as placas estudadas, a região de
estabilização ocorre aproximadamente de 6 do a 7 do após a placa perfurada.
Os resultados obtidos sugerem que a utilização de extensão de influência maior que 8 do no
plano de refinamento da malha não incorpora benefícios significativos nos resultados da perda
de carga ou na definição do comprimento de recuperação da pressão no canal.
5.2.2. Estudo de malha no direcionador de fluxo
Para se determinar o valor ótimo para a relação dfa dl do plano de refinamento localizado no
centro do direcionador de fluxo com extensão de influência igual ao comprimento do
direcionador foram realizadas cinco simulações conforme descrito na metodologia numérica
(Capítulo 4). A condição experimental de escoamento com número de Reynolds igual a
998.184, o maior obtido experimentalmente, foi usada em todas as simulações realizadas no
estudo de malha no direcionador de fluxo. O modelo de turbulência k-ε e simetria de 1/8
foram aplicados a todos os casos simulados.
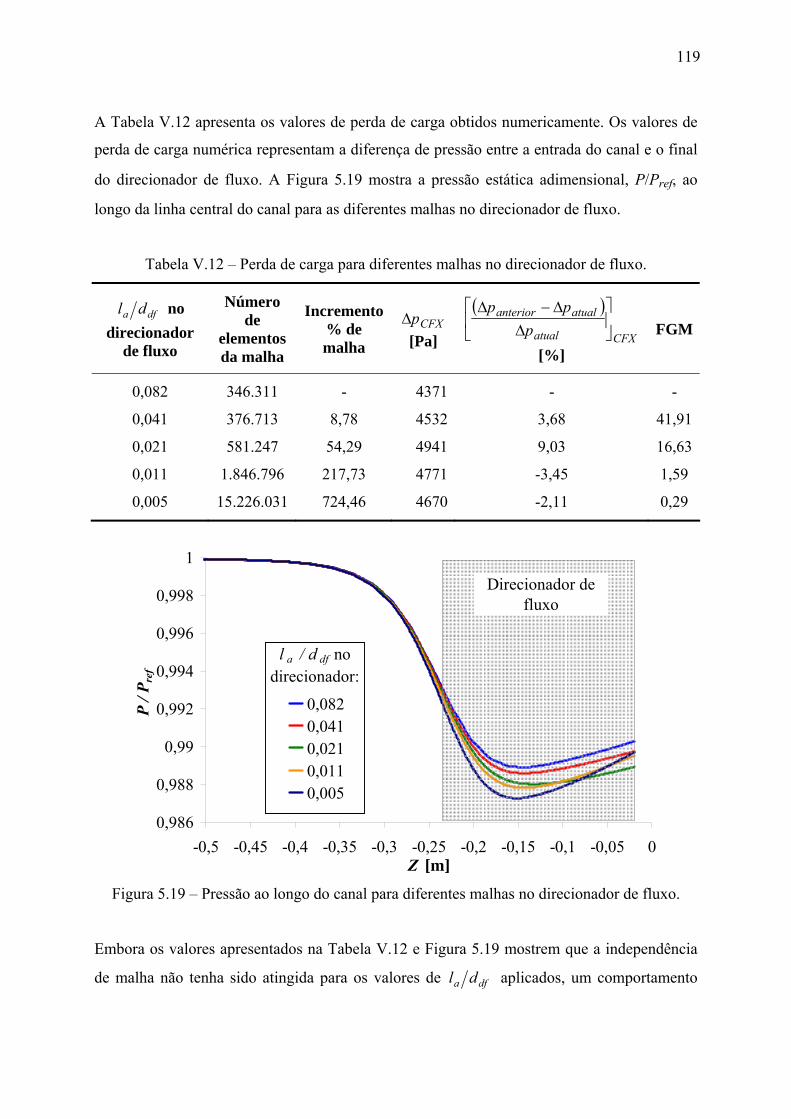
119
A Tabela V.12 apresenta os valores de perda de carga obtidos numericamente. Os valores de
perda de carga numérica representam a diferença de pressão entre a entrada do canal e o final
do direcionador de fluxo. A Figura 5.19 mostra a pressão estática adimensional, P/Pref, ao
longo da linha central do canal para as diferentes malhas no direcionador de fluxo.
Tabela V.12 – Perda de carga para diferentes malhas no direcionador de fluxo.
dfa dl no direcionador
de fluxo
Número de
elementos da malha
Incremento % de malha
CFXpΔ [Pa]
( )CFXatual
atualanteriorp
pp⎥⎦
⎤⎢⎣
⎡Δ
Δ−Δ
[%] FGM
0,082 346.311 - 4371 - -
0,041 376.713 8,78 4532 3,68 41,91
0,021 581.247 54,29 4941 9,03 16,63
0,011 1.846.796 217,73 4771 -3,45 1,59
0,005 15.226.031 724,46 4670 -2,11 0,29
0,986
0,988
0,99
0,992
0,994
0,996
0,998
1
-0,5 -0,45 -0,4 -0,35 -0,3 -0,25 -0,2 -0,15 -0,1 -0,05 0Z [m]
P / P
ref
0,0820,0410,0210,0110,005
l a / d df no direcionador:
Direcionador de fluxo
Figura 5.19 – Pressão ao longo do canal para diferentes malhas no direcionador de fluxo.
Embora os valores apresentados na Tabela V.12 e Figura 5.19 mostrem que a independência
de malha não tenha sido atingida para os valores de dfa dl aplicados, um comportamento

120
convergente para a perda de carga foi verificado. Um refinamento de malha no direcionador
de fluxo com dfa dl menor que 0,011 mostrou ser impraticável devido ao aumento de
elementos provocado. Assim sendo, foi considerado como satisfatório dfa dl igual a 0,011.
Conforme descrito na metodologia numérica (Capítulo 4), simulações foram realizadas em
malhas com refinamento adicional na região do rasgo em forma de meia lua presente no
direcionador. O plano de refinamento abrangendo todo o restante do direcionador apresentou
dfa dl igual a 0,011, valor definido anteriormente como satisfatório. A Tabela V.13
apresenta os resultados de perda de carga obtidos com as novas malhas comparados ao
resultado obtido com malha sem o refinamento localizado.
Tabela V.13 – Perda de carga para diferentes malhas no rasgo do direcionador de fluxo.
dfa dl no rasgo
Número de elementos da malha
Incremento % de malha
CFXpΔ [Pa]
( )CFXnovo
novoanteriorp
pp⎥⎦
⎤⎢⎣
⎡Δ
Δ−Δ[%] FGM
0,0110 1.846.796 - 4771 - -
0,0050 1.979.900 7,21 4726 -0,93 12,84
0,0025 2.552.380 28,92 4717 -0,21 0,72
Os resultados apresentados na Tabela V.13 mostram um grande benefício no uso de um
dfa dl específico para o rasgo igual a 0,005. Um valor de dfa dl no rasgo igual a 0,0025
traz um beneficio muito pequeno no resultado de perda de carga com aumento considerável
na malha. É observado na tabela que ocorre uma redução na perda de carga com o uso de um
refinamento no rasgo, o que mostra um comportamento convergindo para o resultado obtido
com a malha mais refinada (Tabela V.12).
Os perfis de Vz adimensional e de intensidade turbulenta foram traçados sobre uma linha no
plano diagonal central para todas as malhas estudadas e são mostrados na Figura 5.20. Não há
alteração significativa nos perfis entre as malhas com dfa dl igual a 0,005 e 0,0025. Mas
mesmo com o refinamento da malha do rasgo, os perfis de velocidade e principalmente de

121
intensidade turbulenta ficaram afastados dos perfis obtidos para a malha mais refinada
( dfa dl igual a 0,005 em todo o direcionador).
zPlano diagonal
0,0
Posição traçada
2/2Ly2
22 mm
zPlano diagonal
0,0
Posição traçada
2/2Ly2
22 mm
0,082 - 0,08200,041 - 0,04100,021 - 0,02100,011 - 0,01100,011 - 0,00500,011 - 0,00250,005 - 0,0050
no direcionador - rasgo
dfa dl
0,082 - 0,08200,041 - 0,04100,021 - 0,02100,011 - 0,01100,011 - 0,00500,011 - 0,00250,005 - 0,0050
no direcionador - rasgo
dfa dl
0,000,050,100,150,200,250,300,35
0 0,2 0,4 0,6 0,8 12y / L
I
-0,7
-0,2
0,3
0,8
1,3
1,8
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
Figura 5.20 – Perfis de velocidade e intensidade turbulenta no direcionador de fluxo.
A Figura 5.21 mostra os contornos da componente de velocidade Vz no plano diagonal
destacando os rasgos presentes no direcionador. As malhas com dfa dl no rasgo igual a
0,005 e 0,0025 definem diferenças muito pequenas nestes contornos. A Figura 5.22 mostra os contornos da componente de velocidade Vz em um plano normal à
direção de escoamento para as malhas simuladas. É perceptível um comportamento
convergente dos contornos a cada novo refinamento, principalmente na região do rasgo em
meia lua.
Foi observado através dos resultados, que um refinamento de malha na região do rasgo com
um dfa dl menor que 0,005 fornece pequeno benefício. Assim, dfa dl igual a 0,005 foi
definido como satisfatório para esta região.

122
0,082 –0,082
0,041 –0,041
0,021 –0,021
direcionador –rasgo
dfa dl
0,011 –0,011
0,011 –0,005
0,011 –0,0025 Vz
0,005 –0,005
Figura 5.21 – Contornos de Vz no plano de diagonal do direcionador de fluxo.
0,082 – 0,0820 0,041 – 0,0410 0,021 – 0,0210
0,011 – 0,0110 0,011 – 0,0050 0,011 – 0,0025
zPlano diagonal
0,0
Posição das figurasVz
0,005 – 0,0050
Figura 5.22 – Contornos da componente de velocidade Vz em um plano normal a direção de
escoamento do direcionador de fluxo para diferentes malhas.

123
Com base nos resultados obtidos, foram adotados os valores de dfa dl igual a 0,011 para a
região do direcionador de fluxo e dfa dl igual a 0,005 para o refinamento específico na
região do rasgo. A Figura 5.23 apresenta a malha ideal em um corte diagonal.
Figura 5.23 – Malha no direcionador de fluxo em corte diagonal.
5.2.3. Estudo de modelos de turbulência
A placa perfurada com 81 orifícios foi utilizada para verificar o modelo de turbulência RANS
de duas equações, disponíveis no CFX, que melhor prediz a perda de carga no escoamento
através de uma placa perfurada. Os modelos de turbulência k-ε, k-ω e SST foram os testados,
conforme descrito na metodologia numérica. No CFX, o tratamento próximo à parede está
associado ao modelo de turbulência. Este acoplamento torna necessário estudar o efeito da
malha próximo à parede para cada modelo. Por esta razão, as simulações foram realizadas em
duas malhas com valores de 2 e 30 para y+ do primeiro elemento fora da parede, +py . As
malhas foram geradas com oa dl igual a 0,052 e 0,12 nos planos de refinamento da placa
perfurada e região posterior, respectivamente, valores determinados nos estudos apresentados
anteriormente. O refinamento posterior apresentou uma extensão de influência igual a 8 do. Os
cálculos foram realizados na condição de escoamento experimental com maior número de
Reynolds (998.184), por ser mais restritiva do ponto de vista da turbulência.

124
A Tabela V.14 apresenta os resultados obtidos para cada simulação comparados ao valor
obtido através da referência Idelchik (1960), IpΔ = 9230 Pa. Os modelos de turbulência k-ω
e k-ε apresentaram os resultados mais próximos ao da referência.
Tabela V.14 – Perda de carga para diferentes modelos de turbulência.
Modelo de
turbulência +py CFXpΔ [Pa]
( )I
ICFXp
ppΔ
Δ−Δ
[%] CFXy
yy
p
pp⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
Δ
Δ−Δ
=
==
+
++
2
230 [%]
2 9073 -1,69 k-ε
30 9166 -0,69 1,02
2 9331 1,10 k-ω
30 9271 0,45 -0,64
2 9981 8,14 SST
30 9797 6,16 -1,84
Esperava-se um melhor desempenho do modelo de turbulência híbrido SST já que este
permite explorar as principais vantagens dos modelos k-ε e k-ω. No entanto, é verificado que
a perda de carga foi superestimada com relação à referência Idelchik (1960). A Figura 5.24,
que apresenta o comportamento da pressão estática adimensional, P/Pref, ao longo da linha
central do canal, mostra que a principal diferença entre os modelos ocorre no interior dos
orifícios da placa perfurada.
A Figura 5.25 mostra os contornos da componente de velocidade Vz na entrada do orifício
central no plano central da placa perfurada. É visível um descolamento de fluido mais
acentuado no início dos orifícios, caracterizado pelas velocidades negativas, para o cálculo
com o modelo de turbulência SST para ambas as malhas simuladas. Esta provável super
estimativa do descolamento nos orifícios pode justificar a maior perda de carga observada
pelo modelo SST.

125
0,950,955
0,960,965
0,970,975
0,980,985
0,990,995
1
-0,04 -0,02 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16Z [m]
P / P
ref
Placa perfurada
+py 2 30
k-ωk-ε
S.S.T.
+py 2 30
k-ωk-ε
S.S.T.
Figura 5.24 – Pressão ao longo do canal para diferentes modelos de turbulência.
k-ε = 30
k-ε = 2
k-ω = 30
k-ω = 2
S.S.T. = 30
S.S.T. = 2
Vz
+py +
py
+py +
py
+py
+py
Figura 5.25 – Contornos da componente de velocidade Vz na entrada do orifício central da
placa perfurada para diferentes modelos de turbulência.
z

126
Pode-se observar na Figura 5.25 uma pequena redução nos efeitos de descolamento de fluido
previstos pelo modelo k-ε para a malha com +py = 2 em relação à malha com +
py = 30. Esta
redução pode justificar a redução na perda de carga observada entre as simulações com o
modelo k-ε e +py = 30 e +
py = 2 de 1,02%, conforme mostrado na Tabela V.14. Um efeito
menor e oposto é observado nos cálculos com o modelo k-ω, que prevê um pequeno aumento
no descolamento de fluido para a malha com +py = 2 em relação à malha com +
py = 30 e um
pequeno aumento na perda de carga entre estas simulações de 0,64% (Tabela V. 14).
A Figura 5.26 apresenta os perfis adimensionais de Vz (a) e de intensidade turbulenta (b) 2
mm após a entrada de fluido no orifício central da placa perfurada em função de y+ em escala
logarítmica para os modelos de turbulência simulados.
Os comportamentos mostrados na Figura 5.26(a) tornam evidente a redução da recirculação
de fluido na entrada do orifício, quando a malha tem o primeiro elemento mais próximo à
parede +py = 2 para o modelo de turbulência k-ε. O valor limite para o de +
py , imposto pelo
tratamento de parede escalável do CFX para o modelo k-ε, usado na obtenção da velocidade
próxima à parede, faz com que o primeiro elemento da malha esteja sempre na interface entre
a subcamada viscosa e logarítmica para malhas com +py menores que 44. O pequeno erro
decorrente desta imposição é amplificado em regiões onde há descolamento de fluido,
deslocando a região de descolamento. Isto pode ser observado nas simulações realizadas, nas
quais, a “altura” de recirculação passou, em termos de y+, de 80 para 50 com a redução do
+py de 30 para 2. A Figura 5.26(a) também mostra o aumento menos acentuado da
recirculação para o modelo k-ω. Pode-se também observar na figura que os modelos baseados
em ω são capazes de prever a tendência da velocidade na parede para zero, quando o primeiro
elemento da malha se aproxima da parede.
Na Figura 5.26(b), pode-se observar que os valores de intensidade turbulenta calculados para
a malha com +py igual a 30 são maiores do que os calculados na malha com +
py igual a 2 para
todos os modelos de turbulência testados.

127
Ro = 18,88 mm
Posição traçada
Plano central
zy
2 mm
+py 2 30
k-ωk-ε
S.S.T.
+py 2 30
k-ωk-ε
S.S.T.
+py 2 30
k-ωk-ε
S.S.T.
-1-0,5
00,5
11,5
22,5
3
1 10 100 1000y +
V z /
Vz m
édio
0
0,05
0,1
0,15
0,2
1 10 100 1000y +
I
Figura 5.26 – Perfis adimensionais de Vz (a) e de intensidade turbulenta (b) 2 mm após a
entrada de fluido no orifício central da placa perfurada.
A Figura 5.27 apresenta os perfis adimensionais de Vz (a) e de intensidade turbulenta (b) a 2
mm da saída de fluido do orifício central da placa perfurada em função de y+ em escala
logarítmica para os modelos de turbulência simulados.
a)
b)

128
Ro = 18,88 mm
Posição traçada
Plano central
zy
2 mm
+py 2 30
k-ωk-ε
S.S.T.
+py 2 30
k-ωk-ε
S.S.T.
+py 2 30
k-ωk-ε
S.S.T.
0
0,5
1
1,5
2
2,5
3
1 10 100 1000y +
Vz /
Vz m
édio
0
0,05
0,1
0,15
0,2
1 10 100 1000y +
I
Figura 5.27 – Perfis adimensionais de Vz (a) e de intensidade turbulenta (b) 2 mm da saída de
fluido do orifício central da placa perfurada.
Na região definida na Figura 5.27(a) não foi detectado descolamento de escoamento por
nenhum dos modelos utilizados, e os modelos k-ε e k-ω para a malha com +py = 30
apresentam valores muito semelhantes. Este comportamento era esperado já que o primeiro
a)
b)

129
elemento de malha se encontra na subcamada logarítmica da camada limite onde a formulação
de parede de ambos os modelos se tornam semelhantes. Os perfis de velocidades para o
modelo SST apresentam, ao contrario do esperado, um comportamento distante dos outros
modelos, apesar de usar a mesma formulação próxima de parede do modelo k-ω. Para a malha
com +py igual a 2, na região mais próxima à parede, os modelos k-ω e SST fornecem
comportamentos dos perfis de velocidades mais semelhantes entre si com tendências
diferentes da apresentada pelo modelo k-ε. Na Figura 5.27(b), onde são apresentados os perfis
de intensidade turbulenta, pode-se observar que, para a malha com +py igual a 30, os modelos
k-ω e SST também apresentam comportamentos similares e com afastamento crescente em
relação ao previsto pelo modelo k-ε na região mais próxima da parede. Esta diferença se
torna ainda mais acentuada para a malha com +py igual a 2.
A Tabela V.15 apresenta os valores da tensão média de atrito na parede ( ωτ ) da placa
perfurada para os modelos de turbulência com as 2 malhas estudadas. Como esperado, os
modelos k-ω e SST se comportaram de forma semelhante e apresentam valores semelhantes,
pois ambos usam o tratamento automático próximo de parede. É interessante notar que o valor
de ωτ na placa não se alterou com a mudança de +py para o modelo k-ε e aproximadamente
dobrou para os modelos k-ω e SST.
Tabela V.15 – Tensão média de atrito na parede ( ωτ ) da placa perfurada para diferentes
malhas e modelos de turbulência.
Modelo de
turbulência 30=+yωτ [Pa] 2=+yωτ [Pa]
30
302
=
==
+
++ −
y
yy
ω
ωω
τ
ττ [%]
k-ε 27,62 28,43 2,93
k-ω 29,77 59,72 100,61
SST 28,48 56,74 99,23

130
O valor de ωτ permanece praticamente independente de +py para o modelo k-ε devido ao
tratamento de parede escalável que usa um limitador para o valor de +py usado na
determinação dos parâmetros de parede, apresentado na Equação 5.1. Os valores de +py
calculados durante a simulação para a formulação escalável considera apenas um quarto do
comprimento do primeiro elemento, ou seja, o valor de +py é reduzido a 25% do valor real.
Isto faz com que todas as paredes que apresentem valores de +py real abaixo de 44,25 sejam
enquadradas no critério do limitador, causando, nestas paredes, o uso do valor de 11,067 para +py na determinação da velocidade e demais parâmetros de parede.
( )067,11;~ ++ = pp yMÁXIMOy (5.1)
A Figura 5.28 mostra contornos coloridos da componente de velocidade Vz após a placa
perfurada gerados no plano central do domínio para todos os modelos e malhas simulados.
Podem ser observadas poucas diferenças entre os contornos de velocidade Vz obtidos com os
modelos k-ω e k-ε. Os resultados com o modelo SST, entretanto, apresentam contornos muitos
diferentes se comparados com esses outros dois modelos. Próximo à parede do canal, logo
após a placa perfurada, uma grande recirculação de fluido, caracterizada por região com Vz
negativo, é detectada pelo modelo SST.
O descolamento de fluido muito pronunciado próximo à parede do canal, observado em
ambas as malhas simuladas com o modelo SST, pode ter contribuído para a maior perda de
carga observada nas simulações com este modelo.
Apesar de não ter sido detectada nenhuma influência significativa do +py da malha nas
simulações com o modelo k-ε, um estudo mais aprofundado da influência deste parâmetro foi
realizado.

131
k-ε = 30 k-ε = 2
k-ω = 30 k-ω = 2
S.S.T. = 30 S.S.T. = 2
Vz
+py
+py
+py
+py
+py
+py
Figura 5.28 – Contornos da componente de velocidade Vz em um corte central da placa
perfurada com 81 orifícios para diferentes modelos de turbulência.
O escoamento através da placa perfurada com 81 orifícios foi simulado utilizando o modelo
de turbulência k-ε em malhas com valores de 2, 10, 15 e 30 para +py . As malhas foram
geradas com oa dl igual a 0,052 e 0,12 na placa perfurada e região posterior,
respectivamente, valores otimizados nos estudos apresentados anteriormente. O refinamento
posterior apresentou uma extensão de influência igual a 8 do. Os cálculos foram realizados na
condição de escoamento experimental com maior número de Reynolds (998.184), por ser
mais restritiva do ponto de vista da turbulência.
A Tabela V.16 apresenta os valores de perda de carga encontrados numericamente
comparados ao valor obtido através da metodologia Idelchik (1960), IpΔ = 9230 Pa. Os
valores de perda de carga numéricos representam a diferença de pressão entre a entrada e
z

132
saída do domínio, descontada à perda de carga devido ao atrito nas paredes do canal de
escoamento, igual a 276 Pa. A Figura 5.29 apresenta o comportamento da relação pressão
estática / pressão estática de referência do sistema ao longo da linha central do canal.
Tabela V.16 – Perda de carga para diferentes malhas próxima a parede.
+py
Número de elementos da
malha
CFXpΔ [Pa] ( )
I
ICFXp
ppΔ
Δ−Δ[%]
( )CFXatual
atualanteriorp
pp⎥⎦
⎤⎢⎣
⎡Δ
Δ−Δ[%]
30 2.249.398 9166 -0,69 -
15 2.481.521 9129 -1,09 -0,40
10 2.570.197 9080 -1,62 -0,54
2 2.774.721 9074 -1,69 -0,07
0,96
0,965
0,97
0,975
0,98
0,985
0,99
0,995
1
-0,04 -0,02 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16Z [m]
P / P
ref
2101530
y p+ :Placa
perfurada
Figure 5.29 – Pressão ao longo da linha central do canal para diferentes malhas próxima da
parede.
A última coluna da Tabela V.16 mostra que não há alteração significativa no valor da perda
de carga calculada à medida que a malha próxima de parede é refinada. Isto pode ser também
observado na Figura 5.29, onde o comportamento da pressão não se altera ao longo do canal
para malhas com +py menor que 30. A Figura 5.30 apresenta os perfis de velocidades traçados

133
em função de y+ no orifício central da placa perfurada para as diferentes malhas próximas de
parede.
Ro = 18,88 mm
Posições traçadas: 1 2
Plano central
zy
2 mm 2 mm
2101530
y + :+py
-0,50
0,51
1,52
2,53
1 10 100 1000y +
Vz /
Vz m
édio
Posição 2
Posição 1
00,5
11,5
22,5
3
1 10 100 1000y +
V z /
Vz m
édio
0
0,1
0,2
0,3
0,4
1 10 100 1000y +
I
0
0,1
0,2
0,3
0,4
1 10 100 1000y +
I
Figura 5.30 – Perfis de velocidade e de intensidade turbulenta 2 mm (Posição 1) e 18 mm
(Posição 2) após a entrada de fluido no orifício central da placa perfurada com 81 orifícios.
Na Figura 5.30, pode-se observar que tanto a velocidade quanto a turbulência pouco se
alteram com a redução de +py . É também observado que o valor de velocidade inferido no
primeiro elemento não se altera nas duas posições mostradas em todas as malhas simuladas,
mostrando que a formulação de parede escalável desloca a interface entre as subcamadas
viscosa e logarítmica para o primeiro elemento de malha. Este deslocamento afeta a perda de

134
carga calculada (Tabela V.16) já que leva a um perfil de velocidades com gradientes
suavizados quando +py é menor que 11,067 e mais abruptos quando +
py é maior que 11,067.
Apesar de afetar a perda de carga, o impacto do deslocamento nas simulações é de apenas 1%
entre +py = 30 e +
py = 2. Considerando que o deslocamento se da na ordem de 10-2 mm para
Reynolds mais altos e 10-1 mm para Reynolds mais baixos no BP é possível concluir que erros
provocados por efeito serão mínimos na simulação do mesmo.
Embora os resultados da perda de carga total calculados com os modelos k-ε e k-ω pelo CFX
sejam mais próximos do valor de referência determinado obtido no Handbook de Idelchik
(1966), os resultados do modelo SST, particularmente para +py = 2, mostram detalhes do
escoamento de forma mais acentuada que os outros dois modelos. Como já mencionado, as
duas edições do Handbook de Idelchik (1966 e 1986) apresentam correlações diferentes para
a determinação da perda de carga em placas perfuradas sem justificativa para tal alteração.
Portanto esta referência deve ser utilizada com reserva, não podendo ser única forma de
validação para os modelos de turbulência.
Devido à ausência de uma referencia totalmente confiável e a diferença dos resultados
apresentados pelos modelos de turbulência, optou-se por simular o BP aplicando os modelos
de turbulência k-ε e SST e comparar os resultados obtidos com os experimentos. O modelo k-ε
foi escolhido por apresentar resultados similares ao modelo k-ω e por ser um modelo
amplamente empregado em estudos de placas perfuradas (Erdal e Anderson, 1997, Gan e
Riffat, 1997, Frattolillo e Massarotti, 2002 e Burden e McLaury, 2002). Já o SST foi escolhido
por ser um modelo mais sofisticado e por ter apresentado um resultado bastante diferente dos
obtidos com os outros modelos.
Para reduzir o tempo gasto de simulação, foi gerada apenas uma malha para o BP com +py = 2
calculado para a condição de escoamento experimental com maior número de Reynolds. Esta
escolha é suportada pelos resultados obtidos que mostram mínimas variações nos valores
obtidos para diferentes +py de malha para o modelo k-ε e melhor aproximação da camada
limite para +py = 2 para o modelo SST.

135
5.2.4. Influência do chanfro nos orifícios da placa perfurada
Escoamentos através da placa perfurada com 225 orifícios, o mesmo número de orifícios da
placa do BP, foram simulados com e sem a presença de chanfros em ambas as extremidades
dos orifícios conforme descrito na metodologia numérica. Foi utilizada malha com oa dl
igual a 0,052 e 0,12 nos planos de refinamento da placa perfurada e região posterior,
respectivamente, e +py igual a 2. Os cálculos foram realizados com o modelo de turbulência
k-ε na condição de escoamento experimental com maior número de Reynolds (998.184), por
ser mais restritiva do ponto de vista da turbulência. Os resultados obtidos estão comparados
na Tabela V.17. A presença de chanfros na placa perfurada causou grande redução na perda
de carga. Esta redução pode ser também observada na Figura 5.31 que apresenta o
comportamento da pressão estática adimensional ao longo da linha central do canal. A figura
mostra ainda uma grande mudança de comportamento do escoamento na região da placa.
Tabela V.17 – Perda de carga para diferentes placas perfuradas.
Chanfro CFXpΔ [Pa]
CFXchanfro sem
chanfro semchanfro com
ppp
⎟⎟⎠
⎞⎜⎜⎝
⎛
Δ
Δ−Δ [%]
Sem 8929 -
Com 5241 -41,31
0,88
0,9
0,92
0,94
0,96
0,98
1
-0,06 0 0,06 0,12 0,18 0,24Z [m]
P / P
ref
Sem chanfroCom chanfro
Placa perfurada
Figura 5.31 – Pressão ao longo da linha central do canal para a placa perfurada com 225
orifícios com e sem chanfros nas extremidades dos orifícios.

136
A Figura 5.32 mostra os perfis de velocidade e de intensidade turbulenta no orifício central da
placa perfurada com e sem chanfro em duas posições. A figura mostra que na posição 1 a
inserção dos chanfros nas extremidades dos orifícios eliminou a recirculação e reduziu
substancialmente a turbulência presente próxima da parede. Na posição 2, é mostrado que o
perfil de velocidades é bem comportado e a turbulência também é menor quando os chanfros
estão presentes.
Ro = 11,33 mm
Posições traçadas: 1 2
Plano central
zy
2 mm 2 mm
Sem chanfroCom chanfro
Posição 2
Posição 1
-0,1
0,3
0,7
1,1
0 0,2 0,4 0,6 0,8 1y / R o
Vz /
Vz m
édio
00,20,40,60,8
11,2
0 0,2 0,4 0,6 0,8 1y / R o
Vz /
Vz m
édio
0
0,05
0,1
0,15
0,2
0 0,2 0,4 0,6 0,8 1y / R o
I
0
0,05
0,1
0,15
0,2
0 0,2 0,4 0,6 0,8 1y / R o
I
Figura 5.32 – Perfil de velocidade adimensional e de intensidade turbulenta após a placa
perfurada com 225 orifícios com e sem chanfros nas extremidades dos orifícios.

137
A Figura 5.33 apresenta o perfil de intensidade turbulenta ao longo da linha central do canal
para ambas as placas. É sensível a redução da atividade turbulenta e do comprimento de
estabilização do escoamento após a placa perfurada com a presença dos chanfros.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
-0,06 -0,03 0 0,03 0,06 0,09 0,12 0,15 0,18 0,21Z [m]
I
Sem chanfroCom chanfro
Placa perfurada
Figura 5.33 – Perfil de intensidade turbulenta ao longo do canal para a placa perfurada com
225 orifícios com e sem chanfros nas extremidades dos orifícios.
Analisando os contornos de velocidade no orifício central da placa perfurada, mostrados na
Figura 5.34, percebem-se gradientes de velocidade muito mais suaves e menores velocidades
do jato central. Além disto, a camada limite ao longo do comprimento do orifício se torna
mais estreita e o descolamento de fluido presente na entrada do orifício desaparece. Todos
estes efeitos se somam provocando uma redução significativa na perda de carga através da
placa perfurada, em concordância com resultados obtidos por outros pesquisadores (Spearman
et al., 1996).

138
Com chanfro Sem chanfro
Vz
Figura 5.34 – Diferenças entre os perfis de velocidade nos orifícios com e sem chanfro.
5.2.6. Influência da folga entre o canal e a placa perfurada
A placa perfurada com 81 orifícios foi simulada com e sem uma folga de 0,63 mm entre a
placa e o canal de escoamento. As malhas foram geradas com oa dl igual a 0,052 e 0,12 nos
planos de refinamento da placa perfurada e região posterior, respectivamente. As malhas
geradas apresentaram +py iguais a 2. A malha com a folga foi gerada de forma a apresentar 20
elementos entre as superfícies da placa e do canal. Foram realizadas duas simulações na placa
sem a folga, uma aplicando a condição de escoamento não alterado e outra aplicando uma
compensação na vazão devido à mudança da área total de escoamento no canal. Estas
simulações tiveram o intuito de verificar a influência da folga na perda de carga e o quanto
uma compensação da vazão reduz esta influência. As simulações foram realizadas segundo
apresentado na metodologia numérica usando o modelo de turbulência k-ε na condição de
escoamento experimental com maior Reynolds por ser mais restritiva do ponto de vista da
turbulência. A Tabela V.18 mostra os resultados obtidos nas simulações.
z

139
Tabela V.18 – Perda de carga na placa perfurada com 81 orifícios com e sem uma folga de
0,625 mm entre a placa e o canal de escoamento
Folga entre
a placa e o
canal
Número de
elementos
da malha
Vazão
[kg/s] CFXpΔ [Pa]
CFXcom
comsem
ppp
⎟⎟⎠
⎞⎜⎜⎝
⎛
Δ
Δ−Δ
folga
folga folga [%]
Com folga 6.033.396 115,08 8750 -
Sem folga 2.738.963 115,08 9187 5,00
Sem folga 2.738.963 113,84 8950 2,28
A Tabela V.18 mostra que a compensação na vazão devido à diferença de área de escoamento
reduz à metade o erro provocado pela não simulação da folga. Outro dado importante
mostrado na tabela é o aumento de 3.294.433 elementos de malha quando a folga está
presente na geometria, valor elevado para aplicar a simulação do BP. A Figura 5.35 apresenta
o comportamento da razão pressão estática / pressão estática de referência do sistema ao
longo da linha central do canal para os casos simulados. É observado que o comportamento
das três simulações com relação à pressão na linha central do canal não se altera.
0,96
0,965
0,97
0,975
0,98
0,985
0,99
0,995
1
-0,06 -0,03 0 0,03 0,06 0,09 0,12 0,15 0,18 0,21 0,24Z [m]
P / P
ref
Com a folgaSem a folgaSem a folga com a vazão compensada
Placa perfurada
Figura 5.35 – Pressão ao longo da linha central do canal na placa perfurada com 81 orifícios
com e sem uma folga entre o canal e a placa.

140
Na Figura 5.36 são mostrados os contornos de Vz na placa perfurada e região posterior para as
simulações realizadas com e sem a folga para a mesma condição de escoamento. É possível
verificar uma redução da recirculação de fluido presente próximo à parede do canal de
escoamento logo após a placa perfurada quando a folga está presente. Nos orifícios
localizados na periferia da placa perfurada sem a folga é observado um desvio do escoamento
para fora da parede, o que não é observado na simulação com a presença da folga. Estes
fatores juntamente com a maior área livre de escoamento contribuíram para a redução da
perda de carga observada na simulação da placa com a folga.
Com folga Sem folga
Sem folga
Com folga
Vz
Figura 5.36 – Contornos de velocidades para a placa perfurada de 81 orifícios com e sem uma
folga entre a placa e o canal.
Como observado na Tabela V.18, a inserção de uma folga provoca um aumento impraticável
na malha para a simulação do BP. Por isso, esta geometria foi omitida da simulação final.
Apesar da compensação da vazão não ter fornecido um resultado totalmente corrigido, seu
uso ameniza em parte a redução da perda de carga provocada pela folga. Desta forma, foi
z

141
aplicada a compensação da vazão devido à mudança da área de escoamento para todas as
simulações realizadas no BP.
5.2.7. Influência da geometria que antecede a seção de testes
Para avaliar a influência da geometria do canal que antecede a seção experimental foi,
conforme metodologia descrita no capítulo anterior, confeccionada a malha apresentada na
Figura 5.37. Devido às características do escoamento, foi aplicado simetria de 1/2 apenas. As
simulações foram realizadas, em duas etapas. Na primeira etapa foi simulada a geometria sem
a presença da placa perfurada. Devido ao peso computacional, foi necessário usar parâmetros
de malha abaixo dos considerados ótimos. A malha, mostrada na Figura 5.37, apresentou
9.588.787 elementos, número próximo do limite computacional disponível. O modelo de
turbulência k-ε foi usado em todas as simulações.
Figura 5.37 – Malha da geometria que antecede a seção de testes.
Retificador de fluxo

142
A Figura 5.38 mostra os contornos de Vz obtidos na simulação da primeira etapa. Pode-se
observar que, mesmo após o retificador, o perfil de velocidades se mantém bastante
distorcido. É preciso ressaltar que a geometria real apresenta uma tela na saída do retificador,
a qual, provavelmente, gera uma maior mistura turbulenta após o retificador, retificando de
forma mais eficiente o perfil de velocidades. Com isto, a geometria simulada, sem a tela,
representa uma situação conservadora. Ainda assim, os resultados obtidos podem fornecer
indícios importantes sobre o grau de influência do perfil real de velocidade e turbulência nos
resultados medidos e calculados. Foram extraídos os valores de velocidade, energia cinética e
dissipação turbulenta em um plano traçado 20 mm após o retificador de fluxo. Estes
resultados foram usados como dados de entrada para a segunda etapa da avaliação, que se
constituiu na simulação apenas da seção de testes com a placa perfurada.
Z
Vz
Figura 5.38 – Contorno de Vz na geometria que antecede a seção de testes simplificada.
A geometria representada na segunda etapa da simulação foi a da seção de testes com uma
placa perfurada de 81 orifícios. A malha foi gerada com oa dl igual a 0,052 e 0,12 nos
planos de refinamento da placa perfurada e região posterior respectivamente e +py igual a 2

143
para o primeiro elemento fora da parede, valores determinados nos estudos apresentados
anteriormente. Um plano de refinamento adicional foi usado para tratar a região que antecede
a placa perfurada. Este plano foi definido com oa dl igual a 0,265 e uma extensão de
influência de 700 mm, distância da entrada do fluido até a placa perfurada. A malha gerada
apresentou 9.167.446 elementos, aproximadamente 235% maior que a malha gerada com
simetria de 1/8 para a mesma placa e canal.
Na segunda etapa, foram realizadas simulações com perfis uniformes e não-uniformes de
velocidade e turbulência na entrada do domínio. Os perfis não-uniformes foram os extraídos
da primeira etapa.
A Figura 5.39 apresenta os contornos de Vz obtidos nos cálculos. Nota-se que, para a
simulação utilizando os perfis não-uniformes, a assimetria no escoamento persistiu mesmo
após a placa perfurada.
Vz
a a b
b
Figura 5.39 – Contorno de Vz na placa perfurada de 81 orifícios com perfis de velocidade e
turbulência uniformes (a) e não uniformes (b) na entrada do domínio.
z

144
As tomadas de pressão para a medição da perda de carga na seção de testes estão localizadas a
466 mm antes e 341 mm após a face superior da placa perfurada do BP. A perda de carga
média entre estas duas cotas, obtida na simulação realizada com a placa perfurada com perfis
não-uniformes de velocidade e turbulência foi 4,46% menor que a obtida na simulação com
perfil uniforme. O efeito dos perfis não-uniformes na perda de carga pode ser verificado na
Figura 5.40, que apresenta o comportamento da relação pressão estática / pressão estática de
referência do sistema ao longo da linha central do canal.
0,96
0,965
0,97
0,975
0,98
0,985
0,99
0,995
1
1,005
1,01
-0,3 -0,2 -0,1 0 0,1 0,2 0,3Z [m]
P / P
ref
UniformeNão uniforme
Perfis de velocidadee turbulência:
Placa perfurada
Figura 5.40 – Pressão adimensional ao longo da linha central do canal da placa perfurada com
81 orifícios com perfis de velocidade e turbulência uniformes e não-uniformes.
A Figura 5.40 mostra um aumento de pressão no escoamento próximo à placa perfurada para
a simulação com os perfis de velocidade e turbulência não-uniformes. Este aumento de
pressão é observado porque os dados usados para gerar a curva do gráfico foram extraídos
sobre a linha central do canal onde, devido à alteração do perfil de velocidades próximo a
placa, ocorre uma deformação do perfil de pressão ao logo da seção transversal do canal. Esta
deformação pode ser observada na Figura 5.41 que mostra o perfil adimensional de pressão e
velocidade Vz em três diferentes cotas antes da placa perfurada. É observado que a pressão
aumenta na região onde Vz diminui e diminui na região onde Vz aumenta.

145
0,9980,999
11,0011,0021,0031,0041,0051,0061,0071,008
-1 -0,5 0 0,5 12y / L
P / P
ref
zy
Plano central
L / 2
20 mm75 mm150 mm
00,20,40,60,8
11,21,41,61,8
2
-1 -0,5 0 0,5 12y / L
Vz /
Vz m
édio
Figura 5.41 – Perfis de pressão e velocidade adimensional ao longo da seção transversal do
canal na placa perfurada com 81 orifícios – perfis de velocidade e de turbulência não-
uniformes na entrada.
A Figura 5.42 mostra os perfis de velocidade e turbulência traçados nas posições das tomadas
de pressão (Taps) 2 e 7. Comparando os perfis, percebe-se que estes foram muito
influenciados pelos perfis de entrada mesmo após a placa perfurada.

146
zyPlano central L / 2
Tap 2
470 mm 340 mm
UniformeNão uniforme
Perfil de velocidadee turbulência:
UniformeNão uniforme
Perfil de velocidadee turbulência:
Tap 7
Tap 2
Tap 7
0
0,4
0,8
1,2
1,6
-1 -0,5 0 0,5 12y / L
Vz /
Vz m
édio
00,4
0,81,2
1,62
-1 -0,5 0 0,5 12y / L
Vz /
Vz m
édio
0
0,04
0,08
0,12
0,16
-1 -0,5 0 0,5 12y / L
I0
0,04
0,08
0,12
0,16
-1 -0,5 0 0,5 12y / L
I
Figura 5.42 – Perfis de velocidade e de intensidade turbulenta após a placa perfurada com 81
orifícios para perfis de velocidade e turbulência uniforme e não-uniforme.
Fica claro, pelos resultados obtidos, que a geometria que antecede a seção de testes influencia
substancialmente no escoamento através de uma placa perfurada e consequentemente do BP.
No entanto, o uso de um perfil de velocidades e de turbulência não-uniformes na entrada do
domínio limita o uso de simetria para 1/2, o que torna inviável, para a estrutura computacional
disponível, a malha necessária para uma boa simulação do BP. Para verificar a possibilidade
de compensar em parte o efeito da geometria que antecede a seção de testes através da
aplicação de um valor para a intensidade turbulenta na entrada, foram realizadas simulações
com um perfil de velocidades uniforme e valores de 1, 5 e 10% para a intensidade turbulenta.

147
Os resultados obtidos foram comparados aos obtidos através da referência Idelchik (1960) e
apresentados na Tabela V.19.
Tabela V.19 – Perda de carga na placa perfurada com 81 orifícios para diferentes intensidades
turbulentas na entrada do domínio.
Intensidade turbulenta IpΔ [Pa] CFXpΔ [Pa] ( )
I
ICFXp
ppΔ
Δ−Δ [%]
1 % 9230 9159 -0,77
5 % 9230 9187 -0,46
10 % 9230 9163 -0,72
Como pode ser visto na Tabela V.19, não ocorreu alteração significativa no valor da perda de
carga entre os valores de intensidade turbulenta testados. Este fato pode ser observado pelo
comportamento da razão pressão estática / pressão estática de referência do sistema ao longo
da linha central do canal mostrada na Figura 5.43.
0,96
0,965
0,97
0,975
0,98
0,985
0,99
0,995
1
-0,06 -0,04 -0,02 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14Z [m]
P / P
ref
1%5%10%
Intensidadeturbulenta:Placa
perfurada
Figura 5.43 – Pressão ao longo da linha central do canal na placa perfurada com 81 orifícios
para diferentes intensidades turbulentas na entrada do domínio.

148
Na Figura 5.44 são traçados os perfis de intensidade turbulenta ao longo da linha central do
canal para os casos simulados. Como pode ser visto, o efeito da turbulência definido na
entrada do domínio é totalmente dissipado antes de alcançar a placa perfurada (Z = -0,02 m),
não interferindo assim na perda de carga obtida.
0
0,02
0,04
0,06
0,08
0,1
-0,72 -0,6 -0,48 -0,36 -0,24 -0,12 0Z [m]
I
1%5%10%
Intensidadeturbulenta:
Placa perfurada
Figura 5.44 – Perfil de intensidade turbulenta ao longo do canal na placa perfurada com 81
orifícios para diferentes intensidades turbulentas na entrada do domínio.
Os resultados mostram que os níveis de turbulência na entrada testados não influenciam na
perda de carga já que a turbulência se dissipa rapidamente após a entrada. Como do ponto de
vista da turbulência a condição de escoamento simulada é a mais restritiva, é possível assumir
que o efeito da seção de entrada não pode ser compensado através deste artifício.
5.2.8. Validação através de comparação com valores experimentais
O BP foi simulado para todas as condições de escoamento experimentais como descritos na
metodologia numérica. Apenas uma malha foi usada em todas as simulações. A malha foi
gerada aplicando-se os parâmetros otimizados obtidos nos estudos anteriores realizados na
placa perfurada e no direcionador de fluxo. Foram aplicados planos de refinamento com
dfa dl igual a 0,011 no direcionador, dfa dl igual a 0,005 na região do rasgo do

149
direcionador, oa dl igual a 0,052 na placa perfurada e oa dl igual a 0,12 na região posterior
à placa até 8 do. Foi usado +py igual a 2 considerando a condição de escoamento com maior
número de Reynolds para a geração da malha. Todas as condições foram simuladas com os
modelos de turbulência k-ε e SST. A vazão foi reduzida para compensar a folga máxima
presente nos experimentos entre o canal e o BP, de 0,625 mm, para todas as condições.
A malha usada nas simulações apresentou 10.362.162 elementos, sendo simulada em cinco
computadores trabalhando em processamento paralelo. Cada simulação teve duração média de
20 horas. Para as simulações com o modelo SST foi necessário estabelecer um parâmetro de
convergência duas vezes maior (2x10-4) do que o usado para as simulações com o modelo k-ε
devido a dificuldades de convergência constatadas em simulações preliminares. As diferenças
obtidas entre a perda de carga experimental (EXP) e a numérica (CFX) são apresentadas na
Tabela V.20 para todas as tomadas de pressão (Taps) em todas as condições de escoamento
testadas.
Tabela V.20 – Diferenças entre as perdas de carga numérica e experimental no BP.
Diferença Percentual
( )EXP
EXPCFXp
ppΔ
Δ−Δ x 100
Número de Reynolds
111.847 337.263 565.109 773.724 998.184
Tap
k-ε SST k-ε SST k-ε SST k-ε SST k-ε SST
2-4 86,17 93,17 64,62 92,56 84,38 96,52 69,20 87,45 78,37 87,43
2-5 -5,47 7,48 -11,38 -0,01 -7,52 -1,22 -7,09 1,93 -4,59 1,81
2-6 19,98 30,78 10,35 18,87 15,91 17,65 14,04 17,68 16,72 18,02
2-7 19,88 35,37 2,18 14,59 7,83 18,08 12,58 15,41 11,64 13,75
A Tabela V.20 mostra que o modelo k-ε levou a valores de perda de carga global, calculado
entre os Taps 2 e 7, mais próximos dos experimentais em todas as condições de escoamento.

150
As maiores discrepâncias entre experimento e simulação foram observadas nas perdas de
carga entre os Taps 2 e 4. O mau desempenho da modelagem nestes Taps sugere um estudo
mais minucioso na região do Tap 4, próxima do direcionador de fluxo, para melhor avaliar
modelos de turbulência, condições de contorno e malha. Este estudo fica como sugestão para
um futuro trabalho.
A Tabela V.20 mostra que os valores das perdas de carga experimentais entre os Taps 2 e 5
foram maiores que os obtidos com o modelo k-ε. Este resultado indica que a recuperação
acentuada da pressão ocorre mais próxima da placa perfurada nas simulações com o modelo
k-ε do que nos experimentos. A tabela mostra ainda que a simulação com o modelo SST
obteve melhor concordância com os resultados experimentais apenas para a perda de carga
entre os Taps 2 e 5. A Figura 5.45 mostra o comportamento numérico e experimental da
pressão estática adimensional ao longo do canal para todas as vazões.
0,96
0,965
0,97
0,975
0,98
0,985
0,99
0,995
1
-0,5 -0,4 -0,3 -0,2 -0,1 0 0,1 0,2 0,3 0,4 0,5Z [m]
P / P
ref
Bocal
k- εS.S.T.Experimental
Placa perfurada Re = 111847
Re = 337263
Re = 565109
Re = 773724Re = 998184
Figura 5.45 – Pressão estática ao longo do duto com o BP: experimentos x simulações
numéricas.
A Figura 5.46 compara os perfis de Vz adimensional ao longo do eixo y, perpendicular ao
escoamento, nas posições das tomadas de pressão para as simulações numéricas.

151
Tap 4 Tap 5 Tap 6 Tap 7Tap 4 Tap 5 Tap 6 Tap 7
z
yL / 2Plano central
998184773724565109337263111847
Reynolds:
k-ε Tap 4 S.S.T.
k-ε Tap 5 S.S.T.
-1-0,5
00,5
11,5
2
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
-0,50
0,51
1,52
2,5
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
-1-0,5
00,5
11,5
2
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
-0,50
0,51
1,52
2,5
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
k-ε Tap 6 S.S.T.
k-ε Tap 7 S.S.T.
0
0,5
1
1,5
2
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
0
0,5
1
1,5
2
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
0
0,5
1
1,5
2
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
0
0,5
1
1,5
2
0 0,2 0,4 0,6 0,8 12y / L
Vz /
Vz m
édio
Figura 5.46 – Perfis de Vz adimensional nas cotas das tomadas de pressão do canal de
escoamento com o BP.

152
A Figura 5.46 mostra consideráveis diferenças entre os resultados obtidos com os modelos de
turbulência, especialmente na região mais próxima da parede do canal. É possível perceber na
figura que os perfis de velocidade obtidos com o modelo de turbulência k-ε apresentam
tendências de comportamento similares à medida que se aumenta a vazão, fato que ocorre
entre as condições de escoamento com número de Reynolds 111.847 e 773.724. Já as
simulações com o modelo SST, realizadas na mesma faixa de Reynolds, mostraram grande
variação de comportamento no perfil de velocidades à medida que a vazão foi aumentada. Os
perfis para Reynolds extremos são muito semelhantes e consideravelmente diferentes dos
relativos às faixas intermediárias de Reynolds.
Na simulação com o modelo k-ε apresentada na Figura 5.46, pode-se observar uma sensível
mudança de tendência no comportamento do perfil de velocidade para a condição de
Reynolds igual a 998.184 em relação às demais condições de escoamento. Salienta-se que esta
condição de escoamento, com Reynolds de 998.184 foi obtida com mudança das
propriedades da água na mesma vazão imposta para Reynolds igual a 773.724. Nas
simulações com o modelo SST, entretanto, são observadas pequenas diferenças entre os perfis
de velocidades correspondentes a estas duas condições de escoamento.
A Figura 5.47 compara os perfis de intensidade turbulenta ao longo do eixo y, perpendicular
ao escoamento, nas posições das tomadas de pressão para as simulações numéricas. Nas
simulações realizadas com o modelo k-ε pode-se observar tendências similares nos
comportamentos dos perfis de turbulência para as condições com Reynolds de 111.847 a
773.724, e uma mudança de comportamento para a condição com Reynolds de 998.184.
A grande variação nos perfis mostrados nas Figuras 5.46 e 5.47 para as simulações com o
modelo SST podem ser atribuídas, em parte, à não convergência completa das simulações.
Reduções do passo no tempo virtual e aumento do número de interações foram tentados, mas
a convergência em 1x10-4 não pôde ser alcançada. Análises qualitativas dos resultados
indicaram grande flutuação na região do direcionador de fluxo, especialmente após o rasgo.
Uma malha mais refinada na região do direcionador poderia melhorar a convergência e
fornecer melhores resultados com o modelo SST, entretanto, o custo computacional de tal
refinamento supera a capacidade computacional disponível no momento no CDTN.

153
Tap 4 Tap 5 Tap 6 Tap 7Tap 4 Tap 5 Tap 6 Tap 7
z
yL / 2Plano central
998184773724565109337263111847
Reynolds:
k-ε Tap 4 S.S.T.
k-ε Tap 5 S.S.T.
00,050,1
0,150,2
0,250,3
0 0,2 0,4 0,6 0,8 12y / L
I
00,050,1
0,150,2
0,250,3
0,35
0 0,2 0,4 0,6 0,8 12y / L
I
00,050,1
0,150,2
0,250,3
0 0,2 0,4 0,6 0,8 12y / L
I
00,050,1
0,150,2
0,250,3
0,35
0 0,5 12y / L
I
k-ε Tap 6 S.S.T.
k-ε Tap 7 S.S.T.
00,05
0,10,15
0,20,25
0,3
0 0,2 0,4 0,6 0,8 12y / L
I
0
0,05
0,1
0,15
0,2
0 0,2 0,4 0,6 0,8 12y / L
I
00,05
0,10,15
0,20,25
0,3
0 0,2 0,4 0,6 0,8 12y / L
I
0
0,05
0,1
0,15
0,2
0 0,2 0,4 0,6 0,8 12y / L
I
Figura 5.47 – Perfis de intensidade turbulenta nas cotas das tomadas de pressão do canal de
escoamento com o BP.

154
A perda de carga calculada entre os Taps 2 e 7 apresenta uma tendência de aumento com o
aumento do número de Reynolds para as condições de escoamento com Reynolds entre
111.847 e 773.724 tanto para os resultados experimentais quanto os numéricos. Na simulação
com Reynolds igual a 998.184 ocorre pequena queda da perda de pressão. Este aumento no
número de Reynolds foi obtido devido exclusivamente à mudança de temperatura da água.
Este comportamento também foi constatado nos resultados experimentais, como pode ser
observado nas Figuras 5.48 e 5.49 que mostram os comportamentos das perdas de carga entre
os Taps 2 e 7 (DP27) em função do número de Reynolds e da vazão, respectivamente. As
simulações experimentais são comparadas com as numéricas para os dois modelos de
turbulência.
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
0 200000 400000 600000 800000 1000000Re
DP 2
7 [P
a]
EXPk-εS.S.T.
Figura 5.48 – Perda de carga experimental e numérica através do BP em função do número de
Reynolds.
A Figura 5.50 apresenta os coeficientes de perda de carga obtidos entre os Taps 2 e7 (K27) em
função do número de Reynolds para as simulações experimentais (EXP) e numéricas, para
ambos os modelos de turbulência, realizadas no BP.

155
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
0 20 40 60 80 100 120Vazão [kg/s]
DP 2
7 [P
a]
EXPk-εS.S.T.
Figura 5.49 – Perda de carga experimental e numérica através do BP em função da vazão.
2
2,2
2,4
2,6
2,8
3
3,2
3,4
3,6
3,8
4
50000 250000 450000 650000 850000 1050000Re
K27
EXPk-εS.S.T.
Figura 5.50 – Coeficientes de perda de carga experimental e numérico em função do número
de Reynolds.
Na Figura 5.50 pode-se observar que as simulações realizadas com o modelo k-ε apresentaram
melhor concordância com os experimentos, e que as simulações com o modelo SST

156
mostraram uma tendência diferente. As curvas obtidas por regressão linear através dos
resultados experimentais e dos numéricos obtidos com modelo k-ε são praticamente
independentes de Reynolds, e os valores dos coeficientes de perda de carga podem ser
considerados constantes nesta faixa de Reynolds testada. Para os resultados com o modelo k-ε
o valor para o K27 médio é de 3,31 ± 2,5%, 11,87% maior que o valor obtido
experimentalmente, que foi de 2,962 ± 5,5%. Os resultados obtidos com o modelo SST
apresentam tendência de queda acentuada do K27 com Reynolds, com valores 35,55% e
15,22% maiores que os experimentais para Reynolds iguais a 111.847 e 998.184,
respectivamente. Apesar de apresentar um valor com um erro relativamente alto, em relação
aos valores experimentais, os cálculos numéricos com o modelo k-ε se mostraram capazes de
fornecer uma melhor estimativa para o coeficiente de perda de carga.

157
6. CONCLUSÃO
O programa comercial ANSYS CFX 10.0 mostrou-se adequado para a aplicação de um
procedimento numérico para a avaliação da perda de carga no escoamento permanente,
incompressível e adiabático através de um bocal inferior padrão (BP) do elemento
combustível de um reator nuclear do tipo PWR (Pressurized Water Reactor).
Os resultados das várias simulações de placas com 81, 121 e 225 orifícios (mesmo número de
orifícios da placa do BP) apresentaram boa concordância com a referência Idelchik para
Reynolds maiores que 105. Para os escoamentos com Reynolds menor que 105, os quais uma
formulação modificada deve ser aplicada, a concordância não foi satisfatória.
Foi também observado que o comprimento de recuperação da pressão após as placas
perfuradas estudadas é função apenas do diâmetro do orifício, ocorrendo entre 6 a 7 diâmetros
de orifício da placa.
Simulações no direcionador de fluxo do BP mostraram que as malhas geradas com parâmetros
que tornam os resultados quase independentes da malha são excessivamente refinadas e
tornam as simulações impraticáveis devido às restrições computacionais do CDTN.
Dos modelos de turbulência testados, k-ε, k-ω e SST, os modelos k-ε e k-ω forneceram os
melhores resultados, com diferenças nos valores de perda de carga inferiores a 8% quando
comparados com a referência Idelchik.
Foi observado que a presença de chanfros nas extremidades dos orifícios de uma placa
perfurada provoca uma grande redução na perda de carga através dela (~40%) e uma redução
significativa no comprimento de recuperação da pressão.
Resultado de simulações com folga de 0,625 mm entre o BP e sem folga, mostraram que,
mesmo com uma compensação na vazão, a presença da folga reduz em 2,3% a perda de carga
em relação ao escoamento sem folga.

158
Testes computacionais com perfis uniformes e não-uniformes no canal de escoamento em
curva de 90o a montante do BP, usando a placa de 81 furos, mostraram que os perfis não-
uniformes reduzem em 4,46% a perda de carga calculada na placa perfurada em relação ao
perfil uniforme. Testes com valores de intensidade turbulenta de 1, 5 e 10% não resultaram
em nenhuma alteração significativa de valor da perda de carga.
Simulações com o BP nas condições de escoamento experimentais realizadas com os modelos
de turbulência k-ε e SST resultaram em perdas de carga teórica global 19% em média maiores
que as experimentais para o modelo SST. Também houve dificuldade convergência com esse
modelo. Medidas como redução do passo de tempo e aumento do número de interações foram
adotadas, mas não surtiram efeito sobre a convergência.
Os valores de perda de carga global obtidas com o modelo k-ε foram em média ~10% maiores
do que os experimentais. De uma forma geral, os resultados das simulações com o modelo de
turbulência k-ε ficaram mais próximos dos experimentais.
A folga entre o canal e o BP e a geometria que antecede a seção de testes não puderam ser
simulados com a devida exatidão devido a limitações computacionais. Estes dois fatores
talvez sejam os que mais contribuíram para as diferenças entre os resultados numéricos e
experimentais.
Pode-se concluir, então, que o procedimento numérico desenvolvido utilizando o código
comercial CFX se mostrou capaz de obter bons resultados dentro dos limites de incerteza para
cálculos de engenharia e auxiliar na análise, desenvolvimento e aprimoramento de bocais
inferiores de reatores nucleares e de geometrias similares como condicionadores de fluxo e
bocais. Este trabalho deverá subsidiar o desenvolvimento de um elemento combustível
nuclear avançado em curso na INB.

159
Sugestões para trabalhos futuros
• Simular o BP com modelos de turbulência e formulações próximas de parede mais
sofisticadas, como modelos híbridos LES / RANS e formulações de baixo número de
Reynolds.
• Aplicar a metodologia definida no trabalho em diferentes bocais inferiores de
elemento combustível nuclear.
• Realizar experimentos e simulação numérica de placas perfuradas com o intuito de
estudar a validade da metodologia analítica Idelchik, especialmente para condições de
escoamento com número de Reynolds menor que 105.
• Realizar um estudo mais minucioso no direcionador de fluxo para melhor avaliar
modelos de turbulência, condições de contorno e malha.

160
7. REFERÊNCIAS BIBLIOGRÁFICAS
[1] ANSYS CFX 10.0, “User manual”, ANSYS Europe Ltd., 2005.
[2] Bardina, J. E., Huang, P. G. e Coakley, T., “Turbulence modeling validation”,
American Institute of Aeronautics and Astronautics Journal, Artigo 97-2121, 1997.
[3] Barth, T. J. e Jesperson, D. C., “The design and application of Upwind schemes on
unstructured meshes”, American Institute of Aeronautics and Astronautics Journal,
Artigo 89-0366, 1989.
[4] Boussinesq, J., “Essai Sur La Théorie Des Eaux Courantes”, Mem. Présentés Acad.,
Vol. 23, Paris, p. 46, 1877.
[5] Burden, T. L. e McLaury, B. S., “Laser Doppler velocimeter measurements to
characterize turbulence in a constriction with sharp and rounded inlets”, Experiments
in Fluids, Vol. 32, p. 472-480, 2002.
[6] Burmeister, L. C., “Convective heat transfer”. 2ª. Edição, Editora Jonh Wiley & Sons,
Inc., New York, Estados Unidos da América, cap. 1, p. 2, 1993.
[7] Brandt, A., “Multilevel adaptive solutions to boundary value problems”, Math.
Comput., Vol. 31, p. 333-390, 1977.
[8] Erdal, A. e Anderson, H. J., “Numerical aspects of flow computation through orifices”,
Flow Measurement and Instrumentation, Vol. 8, No. 1, p. 27-37, 1997.
[9] Erdal, A., “A numerical investigation of different parameters that affect the
performance of a flow conditioner”, Flow Measurement and Instrumentation, Vol. 8,
No. 2, p. 93-102, 1997.
[10] Fox, R. W. e McDonald A.T., “Introdução à mecânica dos fluidos”. 5ª Edição, Editora
LTC, Rio de Janeiro, cap. 8, p. 215-259, 1998.
[11] Frattolillo, A. e Massarotti, N., “Flow conditioners efficiency a comparison based on
numerical approach”, Flow Measurement and Instrumentation, Vol. 13, p. 1-11, 2002.

161
[12] Gan, G. e Riffat, S. B., “Pressure loss characteristics of orifice and perforated plates”,
Experimental Thermal and Fluid Science, Vol. 14, p. 160-165, 1997.
[13] Grotjans, H. e Menter, F. R., “Wall functions for general application CFD codes”,
Anais da quarta conferencia européia de dinâmica dos fluidos – ECCOMAS 98, p.
1112-1117, 1998.
[14] Hutchinson, B. R. e Raithby, G. D., “A Multigrid method Based on the Additive
Correction Strategy”, Numerical Heat Transfer, Vol. 9, p. 511-537, 1986.
[15] Idelchik, I. E., “Handbook of Hydraulic Resistance”, 3a Edição, Hemisphere Publishing
Corporation, New York, p. 518, 1986.
[16] Idelchik, I. E., “Handbook of Hydraulic Resistance”, 1a Edição, National Technical
Information Service, U. S. Atomic Energy Commission, Washington, D. C., p. 324,
1966.
[17] ISO 5167, “Measurements of fluid flow by means of orifice plates, nozzles and venture
tubes inserted in circular cross-section conduits running full”, International
Organization of Standardization, Geneva, 1980.
[18] Jones, W. P. e Launder, B. E., “The prediction of laminarization with a two-equation
model of turbulence”, International Journal of Heat and Mass Transfer, Vol. 15, p. 301-
314, 1972.
[19] Launder, B. E. e Spalding, D. B., “The numerical computation of turbulent flows”,
Computational Methods Applied to Mechanical Engineering, Vol. 3, p. 269-289, 1974.
[20] Laws, E. M. e Ouazzane, A. K., “A further investigation into flow conditioner design
yielding compact installations for orifice plate flow metering”, Flow Measurement and
Instrumentation, Vol. 6, No. 3, p. 187-199, 1995a.
[21] Laws, E. M. e Ouazzane, A. K., “A further study into the effect of length on the Zanker
flow conditioner”, Flow Measurement and Instrumentation, Vol. 6, No. 3, p. 217-224,
1995b.

162
[22] Liu, R., Ting, D. S-K. e Rankin, G. W., “On the generation of turbulence with a
perforated plate”, Experimental Thermal and Fluid Science, Vol. 28, p. 307-316, 2004.
[23] Liseikin, V. D., “Grid generation methods”. 1ª Edição, Editora Springer, Berlin,
Alemanha, cap. 11, 1999.
[24] Majumdar, S., “Role of underrelaxation in momentum interpolation for calculation of
flow with nonstaggered grids”, Numerical Heat Transfer, Vol. 13, No. 1, p. 125-132,
1988.
[25] Maliska, C. R., “Transferência de Calor e Mecânica do Fluidos Computacional”. LTC,
Rio de Janeiro, 1995.
[26] Menter, F. R., “Influence of freestream value on k-ω turbulence model predictions”,
American Institute of Aeronautics and Astronautics Journal, Vol. 30, No. 6, p. 1657-
1659, 1992.
[27] Menter, F. R., “Two-equation eddy-viscosity turbulence models for engineering
applications”, American Institute of Aeronautics and Astronautics Journal, Vol. 32, No.
8, p. 269-289, 1994.
[28] Merzkirch, W. e Schluter, Th., “PIV measurements of the time-averaged flow velocity
downstream of flow conditioners in a pipeline”, Flow Measurement and
Instrumentation, Vol. 7, No. 3/4, p. 173-179, 1997.
[29] Morrison, G. L., Hall, K. R., Holste, J. C., Ihfe, L., Gaharan, C. e DeOtte, R. E. Jr.,
“Flow development downstream of a standard tube bundle and three different porous
plate flow conditioners”, Flow Measurement and Instrumentation, Vol. 8, No. 2, p. 61-
76, 1997.
[30] Navarro, M. A., “Teste de desempenho fluidodinâmico do bocal inferior do elemento
combustível de ANGRA 2 com Filtro Debries”, CNEN/CDTN e CTMSP, Nota interna,
2006.
[31] Ouazzane, A. K. e Benhadj, R., “Flow conditioners design and their effects in reducing
flow metering errors”, Sensor Review, Vol. 22, No. 3, p. 223-231, 2002.

163
[32] Patankar, S. V., “Numerical heat transfer and fluid flow”. 2ª. Edição, Editora
Hemisphere Publising, New York, Estados Unidos da América, 1980.
[33] Raw, M. J., “Robustness of coupled algebraic multigrid for the Navier-Stokes
equations”, American Institute of Aeronautics and Astronautics Journal, Artigo 96-
0297, 34th Aerospace and Sciences Meeting & Exhibit, Reno, 1996.
[34] Rhie, C. M. e Chow, W. L., “A numerical study of the turbulent flow past an isolated
airfoil with trailing edge separation”, American Institute of Aeronautics and
Astronautics Journal, Artigo 82-0998, 1982.
[35] Scaborough, J. B., “Numerical mathematical analyses”, 4a Edição, Editora Jonh
Hopkins University Press, Baltimore, Estados Unidos da América, 1958.
[36] Schlichting, H. e Gersten, K., “Boundary-layer theory”, 8a Edição expandida, Editora
Springer, Berlin, Alemanha, 2003.
[37] Schmitz, N., “SF Pressure drop 6.2”, Software-factory, Alemanha, 2005
[38] Shultis, J. K. e Faw, R. E., “Fundamentals of nuclear science and engineering”, Marcel
Dekker Inc., New York, E.U.A., cap. 11, 2002.
[39] Silveira Neto, A., “Turbulência nos fluidos aplicada”, Apostila do curso de pós-
graduação intitulada: Turbulência nos Fluidos, cap. 4, 2003.
[40] Spearman, E. P., Sattary, J. A. e Reader-Harris, M. J., “Comparison of velocity and
turbulence profiles downstream of perforated plate flow conditioners”, Flow
Measurement and Instrumentation, Vol. 7, No. 3/4, p. 181-199, 1996.
[41] Tannehill, J. C., Anderson, D. A. e Pletcher, R. H., “Computational fluid mechanics
and heat transfer”, 2ª Edição, Editora Hemisphere Publising, New York, Estados
Unidos da América, 1997.
[42] Tong, L. S. e Weisman, J., “Thermal analysis of pressurized water reactors“, 1ª Edição,
American Nuclear Society, United States of America, 1970.

164
[43] Versteeg, H. K. e Malalasekera, W., “An introduction to computational fluid dynamics
–The finite volume method”, 1a Edição, Pearson Education Limited, Essex, Inglaterra,
cap. 1, 1995.
[44] Vieser, W., Esch, T. e Menter, F. R., “Heat transfer prediction using advanced two-
equation turbulence models”, Memorando técnico do CFX: CFX-VAL10/0602, 2002.
[45] Vukalovich, M. P., “Thermodynamic Properties of Water and Steam”, 6a Edição,
Mashgis, Moscow, 1958.
[46] Yakhot, V. e Orzag, S. A., “Renormalization group analysis of turbulence: basic
theory”, Journal of Scientific Computing, 1986.
[47] Wendt, G., Mickan, B., Kramer, R. e Dopheide, D., “Systematic investigation of pipe
flows and installation effects using laser Doppler anemometry – Part I. Profile
measurements downstream of several pipe configurations and flow conditioners”, Flow
Measurement and Instrumentation, Vol. 7, No. ¾, p. 141-149, 1996.
[48] Wilcox, D. C., “Turbulence modeling for CFD”, 2a Impressão, DCW Industries Inc., La
Cañada, Estados Unidos da America, 1994.
[49] Xiong, W., Kalkuhler, K. e Wolfgang, M., “Velocity and turbulence measurements
downstream of flow conditioners”, Flow Measurement and Instrumentation, Vol. 14, p.
249-260, 2003.

165
Tabela A.1 – Parâmetros da formulação Idelchik (1960) para escoamentos através de placas perfuradas com Reynolds menor que 105.
Re 25 40 60 100 200 400 1000 2000 4000 10000 20000 1x105 2x105
Re0ε 0,34 0,36 0,37 0,40 0,42 0,46 0,53 0,59 0,64 0,74 0,81 0,94 0,96
f Valores de ϕξ
0 1,94 1,38 1,14 0,89 0,69 0,64 0,39 0,3 0,22 0,15 0,11 0,04 0,01
0,2 1,78 1,36 1,05 0,85 0,67 0,57 0,36 0,26 0,2 0,13 0,09 0,03 0,01
0,3 1,57 1,16 0,88 0,75 0,57 0,43 0,3 0,22 0,17 0,1 0,07 0,02 0,01
0,4 1,35 0,99 0,79 0,57 0,4 0,28 0,19 0,14 0,1 0,06 0,04 0,02 0,01
0,5 1,1 0,75 0,55 0,34 0,19 0,12 0,07 0,05 0,03 0,02 0,01 0,01 0,01
0,6 0,85 0,56 0,3 0,19 0,1 0,06 0,03 0,02 0,01 0,01 0 0 0
0,7 0,58 0,37 0,23 0,11 0,06 0,03 0,02 0,01 0 0 0 0 0
0,8 0,4 0,24 0,13 0,06 0,03 0,02 0,01 0 0 0 0 0 0
0,9 0,2 0,13 0,08 0,03 0,01 0 0 0 0 0 0 0 0
0,95 0,03 0,03 0,02 0 0 0 0 0 0 0 0 0 0
Anexo I
A.1 Parâm
etros da formulação Idelchik (1960)
164

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo


















