Model order reduction NXP PowerPoint template (Title) via … · 2007-11-22 · NXP PowerPoint...
38
NXP PowerPoint template (Title) Template for presentations (Subtitle) Name Model order reduction via dominant poles Joost Rommes [[email protected]] NXP Semiconductors/Corp. I&T/DTF/Mathematics Joint work with Nelson Martins (CEPEL), Gerard Sleijpen (UU) Symposium on recent advances in MOR November 23, 2007
Transcript of Model order reduction NXP PowerPoint template (Title) via … · 2007-11-22 · NXP PowerPoint...

NXP PowerPoint template (Title)Template for presentations (Subtitle)
Name
Subject
Project
MMMM dd, yyyy
Model order reductionvia dominant poles
Joost Rommes [[email protected]]NXP Semiconductors/Corp. I&T/DTF/MathematicsJoint work with Nelson Martins (CEPEL), Gerard Sleijpen (UU)
Symposium on recent advances in MORNovember 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Introduction
Eigenvalue problems and applications
Dynamical systems and transfer functions
Dominant poles
Dominant Pole Algorithm
Applications
Conclusions
2/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Introduction
I Large-scale dynamical systems arise inI electrical circuit simulationI structural engineeringI power system engineeringI . . .
I Transfer function and properties are used forI simulationI behavioral modelingI stability analysisI controller design
I Relatively few transfer function poles of practical importanceI Three key questions:
I Which poles are important (dominant)?I How to compute these poles efficiently?I How to use these poles in model order reduction?
3/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
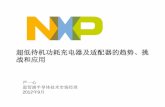
Motivating example I: Pole-zero analysisFrequency response of regulator IC (1000 unknowns). Which polecauses peak around 6MHz?
1.010.0
100.01.0k
10.0k100.0k
1.0M10.0M
100.0M1.0G
10.0G
(LOG)
-60.0
-50.0
-40.0
-30.0
-20.0
-10.0
0.0
10.0
20.0(LIN)
Oct 17, 200711:35:07
Bode Plot
Analysis: AC
User: nlv18077 Simulation date: 17-10-2007, 10:21:28
File: /home/nlv18077/test/pstar/stability_ne.sdif
F
DB(VN(VREG))
Note dB(x)= 20 ·10 log(x), e.g. -60 dB = 10−3
4/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Motivating example II: Model order reduction
Transfer function of power system (66 unknowns). How tocompute reduced order model?
0 5 10 15 20 25 30 35−120
−110
−100
−90
−80
−70
−60
−50
−40
−30
Frequency (rad/s)
Gai
n (d
B)
ExactReduced (series) (k=11)Error (orig − reduced)
5/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
The generalized eigenvalue problem
Given A,E ∈ Rn×n, find (λ, x, y) that satisfy
Ax = λEx, x 6= 0
y∗A = λy∗E , y 6= 0
An eigentriplet (λ, x, y) consists of
λ ∈ C eigenvalue
x ∈ Cn right eigenvector
y ∈ Cn left eigenvector
I (A,E ) has n eigenvalues (real / complex conjugated pairs)
I Corresponding eigenspaces need not be n-dimensional
I Bi-orthogonality: λi 6= λj ⇒ y∗j Exi = 0
6/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Eigenvalue decompositions
Complete eigenvalue decomposition (Λ,X ,Y ):
AX = EXΛ, Y ∗A = ΛY ∗E with Y ∗EX = I ,Y ∗AX = Λ
Λ = diag(λ1, λ2, . . . , λn) ∈ Cn×n
X = [x1, x2, . . . , xn] ∈ Cn×n
Y = [y1, y2, . . . , yn] ∈ Cn×n
In practice only interest in k � n eigentriplets: partial ED
AXk = EXkΛk , Y ∗k A = ΛkY ∗
k E with Y ∗k EXk = I ,Y ∗
k AXk = Λk
Λk = diag(λ1, λ2, . . . , λk) ∈ Ck×k
Xk = [x1, x2, . . . , xk ] ∈ Cn×k
Yk = [y1, y2, . . . , yk ] ∈ Cn×k
7/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Eigenvalue computations
Methods for complete eigendompositions:
I QR method for AX = XΛ
I QZ method for AX = EXΛ
I Complexity O(n3), practical use up to n ≈ 2000
Methods for partial eigendecompositions:
I Krylov methods (Lanczos, Arnoldi)
I Newton based methods (Jacobi-Davidson [Sleijpen, Van derVorst (1995)])
I No dense matrix computations needed
I Careful selection strategies needed
8/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
First-order dynamical systems
First-order SISO dynamical system{E x(t) = Ax(t) + bu(t)y(t) = c∗x(t) + du(t)
where
u(t), y(t), d ∈ R, input, output, direct i/o
x(t),b, c ∈ Rn, state, input-to-, -to-output
E ∈ Rn×n, system (descriptor) matrix
A ∈ Rn×n, system matrix
9/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Transfer functionFirst-order SISO dynamical system (d = 0):{
E x(t) = Ax(t) + bu(t)y(t) = c∗x(t)
with transfer function
H(s) = c∗(sE − A)−1b
Poles are λ ∈ C for which
lims→λ
H(s) =∞,
or, equivalently,det(λE − A) = 0,
i.e. the eigenvalues of (A,E )
10/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Transfer function H(s) = c∗(sE − A)−1b
Can be expressed as
H(s) =n∑
i=1
Ri
s − λi,
where residues Ri are
Ri = (c∗xi )(y∗i b),
and (λi , xi , yi ) are eigentriplets (i = 1, . . . , n)
Axi = λiExi , right eigenpairs
y∗i A = λiy∗i E , left eigenpairs
y∗i Exi = 1, normalization
y∗j Exi = 0 (i 6= j), E -orthogonality
11/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles cause peaks in Bode-plot
H(s) = c∗(sE − A)−1b =n∑
i=1
Ri
s − λiwith Ri = (c∗xi )(y
∗i b)
Bode-plot is graph of (ω, |H(iω)|)I frequency ω ∈ RI magnitude |H(iω)| usually in dB (note dB(x)= 20 ·10 log(x))
Consider pole λ = α + βi with residue R, then
limω→β
H(iω) = limω→β
R
iω − (α + βi)+
n−1∑j=1
Rj
iω − λj
=R
α+ Hn−1(iβ)
Hence pole λ with large∣∣∣ RRe(λ)
∣∣∣ causes peak
12/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
0 2 4 6 8 10 12 14 16 18 20−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequency (rad/s)
Gai
n (d
B)
ResponseDominant poles
Figure: Bode plot (ω, |H(iω)|). Pole λj dominant if|Rj |
|Re(λj )|large.
13/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles of transfer functions
H(s) =n∑
i=1
Ri
s − λiwith Ri = (c∗xi )(y
∗i b)
I Pole λi dominant if |Ri ||Re(λi )|
large
I Dominant poles cause peaks in Bode-plot (ω, |H(iω)|)I Effective transfer function behavior:
Hk(s) =k∑
i=1
Ri
s − λi,
where k � n and (λi ,Ri ) ordered by decreasing dominance
I Early work modal approximation [Davison, Marschall (1966)]
14/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant Pole Algorithm (DPA) and extensions
DPA [Martins (1996)] computes dominant poles of
H(s) = c∗(sE − A)−1b
1. Newton scheme
2. Nice convergence behavior [R., Sleijpen (2006)]
3. Subspace acceleration, selection, deflation: SADPA [R.,Martins (2006)]
4. Efficient deflation, extensions, applications [R., Martins,Pellanda (2006)]
15/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant Pole Algorithm [Martins (1996)]
H(s) = c∗(sE − A)−1b
I Pole λ: lims→λ H(s) =∞, or lims→λ1
H(s) = 0
Apply Newton’s Method to 1/H(s):
sk+1 = sk +1
H(sk)
H2(sk)
H ′(sk)
= sk −c∗(skE − A)−1b
c∗(skE − A)−1E (skE − A)−1b
Note dHds = −c∗(skE − A)−1E (skE − A)−1b
16/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant Pole Algorithm
1: Initial pole estimate s1, tolerance ε� 12: for k = 1, 2, . . . do3: Solve vk ∈ Cn from (skE − A)vk = b4: Solve wk ∈ Cn from (skE − A)∗wk = c5: Compute the new pole estimate
sk+1 = sk −c∗vk
w∗kEvk
6: The pole λ = sk+1 with x = vk/‖vk‖2 and y = wk/‖wk‖has converged if
‖(sk+1E − A)x‖2 < ε
7: end for
17/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Twosided Rayleigh quotient iteration
Note that with v ≡ vk and w ≡ wk
sk+1 = sk −c∗(skE − A)−1b
w∗Ev
= skw∗Ev
w∗Ev− c∗(skE − A)−1(skE − A)(skE − A)−1b
w∗Ev
=w∗Av
w∗Ev
Step DPA Twosided RQI
3 solve (skE − A)vk = b solve (skE − A)vk = Evk−1
4 solve (skE − A)∗wk = c solve (skE − A)∗wk = E ∗wk−1
Original work on twosided RQI [Ostrowski (1958), Parlett (1974)]
18/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Convergence behavior: DPA vs. RQI
Figure: λ = −0.47 + 8.9i : DPA: red + yellow, RQI: red + light blue.
19/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Convergence behavior: DPA vs. RQI
Typically, with initial pole guess s0,I DPA converges to dominant pole closest to s0
I with ∠(c, x) and ∠(b, y) smallI i.e., large |R| with R = (c∗x)(y∗b)
I Quadratic rate of convergence
I See also [R., Sleijpen (2006)]
while
I RQI converges to pole closest to s0I Originally intended for refinement of eigenpairs
I Cubic rate of convergence
I See also [Ostrowski (1958), Parlett (1974)]
20/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Extensions of DPA
I DPA is a single pole algorithm
I May have very local behavior
I In practice more than one pole neededI Subspace Accelerated DPA [R., Martins (2006)]
I Subspace AccelerationI Several pole selection strategiesI Deflation techniques
21/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Subspace acceleration and selectionI Keep approximations vk and wk in search spaces V and W
I Petrov-Galerkin leads to projected eigenproblem
Ax = θE x,
y∗E = θy∗A
where E = W ∗EV ∈ Ck×k and A = W ∗AV ∈ Ck×k
I Gives k approximations (θi , xi = V xi , yi = W yi ) in iter k
I Select approximation with largest residue as next shift:
sk+1 = argmaxi
∣∣∣∣(c∗xi )(y∗i b)
Re(θi )
∣∣∣∣I Similarities with twosided Jacobi-Davidson ([Hochstenbach
(2003), Stathopoulos (2002)])
22/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Deflation for H(s) = c∗(sE − A)−1b
I Triplet (λ, x, y): Ax = λEx and y∗A = λy∗E
I New search spaces: V ⊥ E ∗y and W ⊥ Ex
I Usual deflation (every iteration):
vk ← (I − xy∗E )vk
wk ← (I − yx∗E ∗)wk
I More efficient: deflate only once
bd ← (I − Exy∗)b ⇒ vk = (skE − A)−1bd ⊥ E ∗y
cd ← (I − E ∗yx∗)c ⇒ wk = (skE − A)−∗cd ⊥ Ex
I Note that y∗bd = c∗dx = 0
23/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Deflation of dominant poles removes peaks
0 2 4 6 8 10 12 14 16 18 20−90
−80
−70
−60
−50
−40
−30
Frequency (rad/sec)
Gain
(dB
)
Bodeplot
Exact
Modal Equiv.
Figure: Exact transfer function (solid) with removal of dominant poles:−0.467± 8.96i (square), −0.297± 6.96i (asterisk), −0.0649 (diamond),and −0.249± 3.69i (circle).
24/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Applications of DPA
I Pole-zero analysis in circuit simulationI Applications in model order reduction
I Modal approximationI Dominant poles may lie anywhere in complex planeI Combinations with rational Krylov methods
25/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Pole-zero analysis
I Large nonlinear Regulator IC (n = 1000)
I Designed to deliver constant output voltage
I Turns unstable for certain loads
I Interested in positive poles and dominant poles
I Linearization around DC solution
Results:
Method Time (s) Poles
QR 450 allDPA 41 994 · 103 ± i5.6 · 106
−8.0 · 106 ± i4 · 106
−337 · 103
26/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
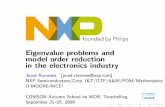
Pole-zero analysisFrequency response of circuit (1000 unknowns). Pole994 · 103 ± i5.6 · 106 causes peak around 6MHz.
1.010.0
100.01.0k
10.0k100.0k
1.0M10.0M
100.0M1.0G
10.0G
(LOG)
-60.0
-50.0
-40.0
-30.0
-20.0
-10.0
0.0
10.0
20.0 (LIN)
Oct 17, 200716:38:18
names: A_* --> 3 stability_ne.qr.sdif (AC)Bode Plot + B_* --> 1 stability_ne_dpa_3.cgap (AC)Bode Plot
Analysis: AC
User: nlv18077 Simulation date: 17-10-2007, 10:21:28
File: /home/nlv18077/test/pstar/stability_ne.qr.sdif
F
- y1-axis -
A_DB(VN(VREG))
B_DB
27/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Model order reduction
Given large-scale dynamical system{E x(t) = Ax(t) + bu(t)y(t) = c∗x(t) + du(t)
where x(t),b, c ∈ Rn and E ,A ∈ Rn×n, find{Ek xk(t) = Akxk(t) + bku(t)yk(t) = c∗kxk(t) + du(t)
where xk(t),bk , ck ∈ Rk , Ek ,Ak ∈ Rk×k and
I k � n
I approximation error ‖y − yk‖ small
28/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Model order reduction
Model order reduction via projection:
1. Construct matrices V ,W ∈ Rn×k whose columns form a basisfor the dominant dynamics
2. Project using V and W :
Ek = W ∗EV , Ak = W ∗AV , bk = W ∗b, ck = V ∗c
Various projection based methods:
I Modal truncation: columns V , W are eigenvectors of (A,E )
I Moment matching: columns V , W are bases for Krylov spaces
I Balanced truncation: V , W part of balancing transformation
29/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Modal approximation and moment matching
0 2 4 6 8 10 12 14 16 18 20−90
−80
−70
−60
−50
−40
−30
−20
Frequency (rad/s)
Gai
n (d
B)
SADPA (k=12)Dual Arnoldi (k=30)Orig (n=66)
Figure: Frequency response of complete system (n = 66), modalapproximation (k = 12), and dual Arnoldi model (k = 30).
30/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles: location in complex plane
−16 −14 −12 −10 −8 −6 −4 −2 0 2−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
real
imag
exact polesSADPA (k=12)Dual Arnoldi (k=30)
region of interest
Figure: Pole spectrum of complete system (n = 66), modalapproximation (k = 12), and dual Arnoldi model (k = 30).
31/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles: location in complex plane (zoom)Dominant poles not necessarily at outside of spectrum
−1 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
real
imag
exact polesSADPA (k=12)Dual Arnoldi (k=30)
Figure: Pole spectrum (zoom) of complete system (n = 66), modalapproximation (k = 12), and dual Arnoldi model (k = 30).
32/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Rational Krylov methods [Ruhe (1998)]
General approach:
1. Choose m interpolation points si
2. Construct Vi ,Wi ∈ Cn×ki such that
colspan(Vi ) = Kki ((siE − A)−1E , (siE − A)−1Eb)
colspan(Wi ) = Kki ((siE − A)−∗E ∗, (siE − A)−∗E ∗c)
3. Project with V = [V1, . . . ,Vm] and W = [W1, . . . ,Wm]
Open question:
I How to choose interpolation points si?
I See also PhD thesis Grimme (1997)
33/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
10−1
100
101
−60
−40
−20
0
20
40
60
Frequency (rad/sec)
Gai
n (d
B)
k=40 (RKA)k=10 (QDPA)k=50 (RKA+QDPA10)Exact
Figure: Breathing sphere (n = 17611). Exact transfer function (solid),40th order SOAR RKA model (dot), 10th (dash-dot) order modalequivalent, and 50th order hybrid RKA+QDPA (dash).
34/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Breathing sphere ([Lampe, Voss (2006)]) (n = 17611)
I Two-sided rational SOAR [Bai and Su (2005)] model (k = 40,shifts 0.1, 0.5, 1, 5) misses peaks
I Small QDPA model (k = 10) matches some peaks, missesglobal response
I 500 s (SOAR, k = 2 · 40) vs. 2800 s (QDPA, 108 iters)
I Hybrid: Y = [YQDPA,YSOAR] and X = [XQDPA,XSOAR]
I Larger SOAR models: no improvement
I More poles with QDPA: expensive
I Use imaginary parts of poles as shifts for SOAR!
I Shifts σ1 = 0.65i , σ2 = 0.78i , σ3 = 0.93i , and σ4 = 0.1
I Two-sided rational SOAR, 10-dimensional bases
35/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
10−1
100
101
−250
−200
−150
−100
−50
0
50
Frequency (rad/sec)
Gai
n (d
B)
k=70 (RKA)ExactRel Error
Figure: Breathing sphere (n = 17611). Exact transfer function (solid),70th order SOAR RKA model (dash) using interpolation points based ondominant poles, and relative error (dash-dot).
36/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Concluding remarks
I DPA for computation of dominant poles
I Subspace acceleration, selection, and efficient deflation
I Straightforward implementationI Applications:
I Various specialized eigenvalue problemsI Model order reduction:
I Construction of modal approximationsI Interpolation points for rational KrylovI Behavioral modeling
Generalizations:
I Second and higher-order systems
I MIMO systems
I Computation of dominant zeros z : H(z) = 0
37/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Thank you!
MOOREN I C E!
38/38NXP Semiconductors Corp. I&T/DTF, Joost Rommes, November 23, 2007