
Mixed Integer Programming Models for Non-Separable Piecewise Linear Cost Functions
22
INFORMS Annual Meeting 2008 – Washington, DC Mixed Integer Programming Models for Non-Separable Piecewise Linear Cost Functions Juan Pablo Vielma Shabbir Ahmed George Nemhauser H. Milton Stewart School of Industrial and Systems Engineering Georgia Institute of Technology
Transcript of Mixed Integer Programming Models for Non-Separable Piecewise Linear Cost Functions

INFORMS Annual Meeting 2008 – Washington, DC
Mixed Integer Programming Models for
Non-Separable Piecewise Linear Cost
Functions
Juan Pablo Vielma Shabbir Ahmed George Nemhauser
H. Milton Stewart School of Industrial and Systems Engineering
Georgia Institute of Technology
/20
Outline
Introduction
Modeling Piecewise Linear Functions
Computational Results
Conclusions
2

is a piecewise linear function .
is any compact set. /20
Introduction
Piecewise Linear Optimization
3

/20
Introduction
Piecewise Linear Functions (PLF)
Approximate non-linearities,
discounts for volume, etc.
Many Applications.
Convex = Linear Programming.
Non-Convex = NP Hard.
Specialized algorithms (Tomlin
1981, ..., de Farias et al. 2008 ) or
Mixed Integer Programming Models
(12+ papers)
4

/20
Introduction
Non-Separable = Multivariate
Separable function:
Functions can sometimes be separated:
Undesirable for numerical reasons and strength.
Not possible for interpolated functions.5

/20
Modeling Piecewise Linear Functions
Modeling Function = Epigraph
Example: 6
0 1 2 4 5
f(4) = 50
f(0) = 10
f(1) = 32
f(2) = 40
f(5) = 15
(a) f .
0 1 2 4 5
50
10
32
40
15
(b) epi(f).
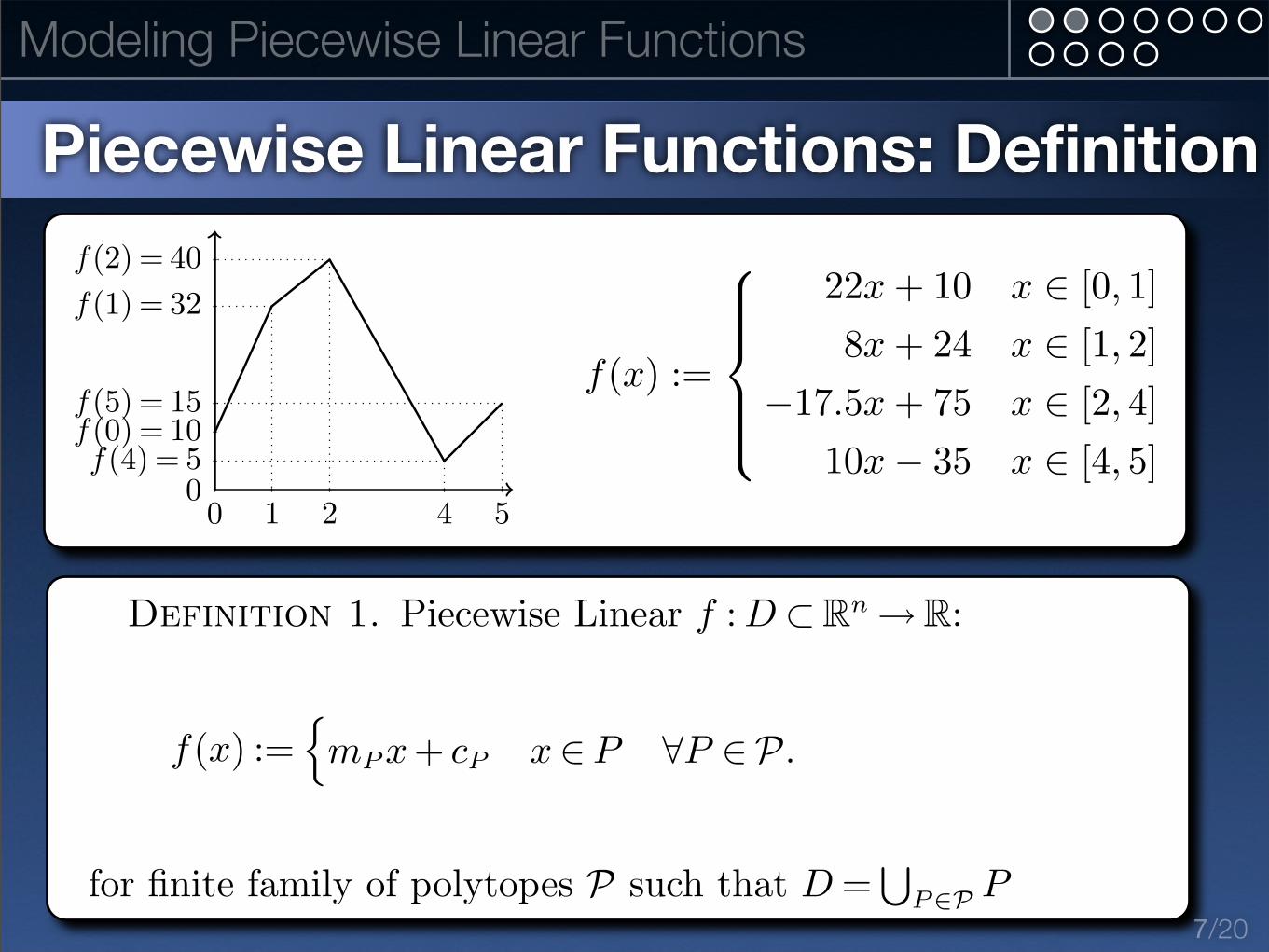
Definition 1. Piecewise Linear f : D ⊂Rn →R:
f(x) :={
mP x+ cP x∈ P ∀P ∈P.
for finite family of polytopes P such that D =⋃
P∈PP
/20
Modeling Piecewise Linear Functions
Piecewise Linear Functions: Definition
7
0 1 2 4 5
f(4) = 50
f(0) = 10
f(1) = 32
f(2) = 40
f(5) = 15

/20
Modeling Piecewise Linear Functions
Epigraph of PLF is Union of Polyhedra
8
= ∪ ∪ ∪⋃
∈P
( )
epi(f) = C+
n+
⋃
P∈P
conv(
{(v, f(v))}v∈V (P )
)
= C+
n+
⋃
P∈P
conv(
{(v, mP v + cP )}v∈V (P )
)
C+
n := {(0, z) ∈ n × : z ≥ 0}, V (P ) := vertices of P .

/20
Modeling Piecewise Linear Functions
Convex Combination Models
9
d0 d1 d2 d3 d4
f(d3)0
f(d0)
f(d1)
f(d2)
f(d4)

/20
Modeling Piecewise Linear Functions
Disaggregated Conv. Comb. (DCC)
Croxton et al. (2003a), Jeroslow (1987), Jeroslow and
Lowe (1984), Lowe (1984), Meyer (1976) and Sherali (2001)
10
∑
P∈P
∑
v∈V (P )
λP,vv = x,∑
P∈P
∑
v∈V (P )
λP,v (mP v + cP )≤ z
λP,v ≥ 0 ∀P ∈P, v ∈ V (P ),∑
v∈V (P )
λP,v = yP ∀P ∈P
∑
P∈P
yP = 1, yP ∈ {0,1} ∀P ∈P.

/20
Modeling Piecewise Linear Functions
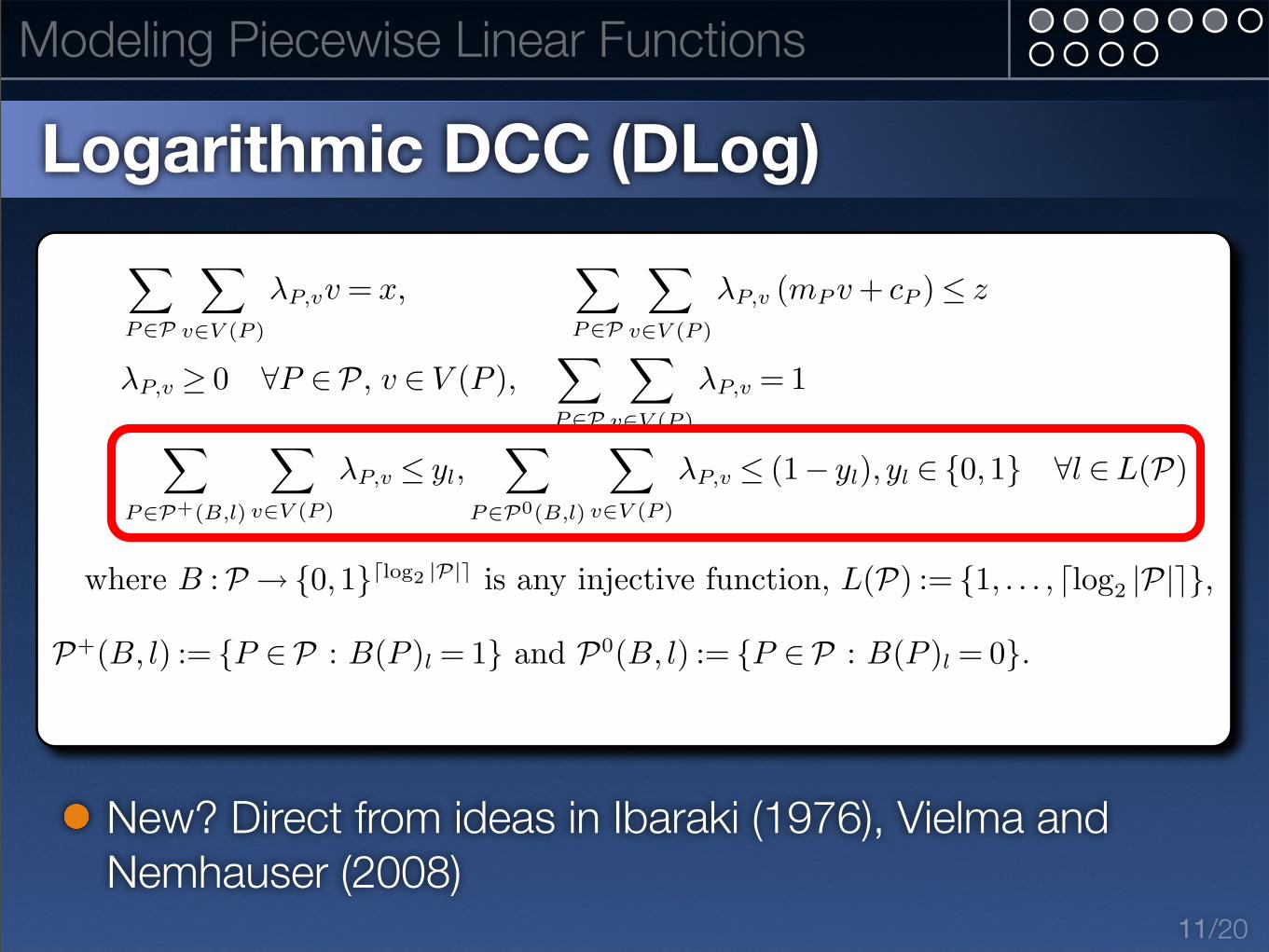
Logarithmic DCC (DLog)
New? Direct from ideas in Ibaraki (1976), Vielma and
Nemhauser (2008)11
∑
P∈P
∑
v∈V (P )
λP,vv = x,∑
P∈P
∑
v∈V (P )
λP,v (mP v + cP )≤ z
λP,v ≥ 0 ∀P ∈P, v ∈ V (P ),∑
P∈P
∑
v∈V (P )
λP,v = 1
∑
P∈P+(B,l)
∑
v∈V (P )
λP,v ≤ yl,∑
P∈P0(B,l)
∑
v∈V (P )
λP,v ≤ (1− yl), yl ∈ {0,1} ∀l ∈L(P)
where B :P → {0,1}⌈log2 |P|⌉ is any injective function, L(P) := {1, . . . , ⌈log2 |P|⌉},
P+(B, l) := {P ∈P : B(P )l = 1} and P0(B, l) := {P ∈P : B(P )l = 0}.
/20
Modeling Piecewise Linear Functions
Logarithmic DCC (DLog)
New? Direct from ideas in Ibaraki (1976), Vielma and
Nemhauser (2008)11
∑
P∈P
∑
v∈V (P )
λP,vv = x,∑
P∈P
∑
v∈V (P )
λP,v (mP v + cP )≤ z
λP,v ≥ 0 ∀P ∈P, v ∈ V (P ),∑
P∈P
∑
v∈V (P )
λP,v = 1
∑
P∈P+(B,l)
∑
v∈V (P )
λP,v ≤ yl,∑
P∈P0(B,l)
∑
v∈V (P )
λP,v ≤ (1− yl), yl ∈ {0,1} ∀l ∈L(P)
where B :P → {0,1}⌈log2 |P|⌉ is any injective function, L(P) := {1, . . . , ⌈log2 |P|⌉},
P+(B, l) := {P ∈P : B(P )l = 1} and P0(B, l) := {P ∈P : B(P )l = 0}.

∑
v∈V(P)
λvv = x,
∑
v∈V(P)
λv (mP v + cP )≤ z
λv ≥ 0 ∀v ∈ V(P),∑
v∈V(P)
λv = 1
λv ≤∑
P∈P(v)
yP ∀v ∈ V(P),
∑
P∈P
yP = 1, yP ∈ {0,1} ∀P ∈P,
/20
Modeling Piecewise Linear Functions
Convex Combination (CC)
Dantzig (1963, 1960), Garfinkel and Nemhauser (1972), Jeroslow and Lowe (1985), Keha
et al. (2004), Lee and Wilson (2001), Lowe (1984), Nemhauser and Wolsey (1988),
Padberg (2000) and Wilson (1998)12
where P(v) := {P ∈P : v ∈ P}. This

/20
Modeling Piecewise Linear Functions
Logarithmic Conv. Comb. (Log)
Requires Independent Branching Scheme.
Vielma and Nemhauser (2008).
13
∑
v∈V(P)
λvv = x,
∑
v∈V(P)
λv (mP v + cP )≤ z
λv ≥ 0 ∀v ∈ V(P),∑
v∈V(P)
λv = 1
∑
v∈Ls
λv ≤ ys,
∑
v∈Rs
λv ≤ (1− ys), ys ∈ {0,1} ∀s∈ S.

/20
Modeling Piecewise Linear Functions
Logarithmic Conv. Comb. (Log)
Requires Independent Branching Scheme.
Vielma and Nemhauser (2008).
13
∑
v∈V(P)
λvv = x,
∑
v∈V(P)
λv (mP v + cP )≤ z
λv ≥ 0 ∀v ∈ V(P),∑
v∈V(P)
λv = 1
∑
v∈Ls
λv ≤ ys,
∑
v∈Rs
λv ≤ (1− ys), ys ∈ {0,1} ∀s∈ S.
/20
Modeling Piecewise Linear Functions
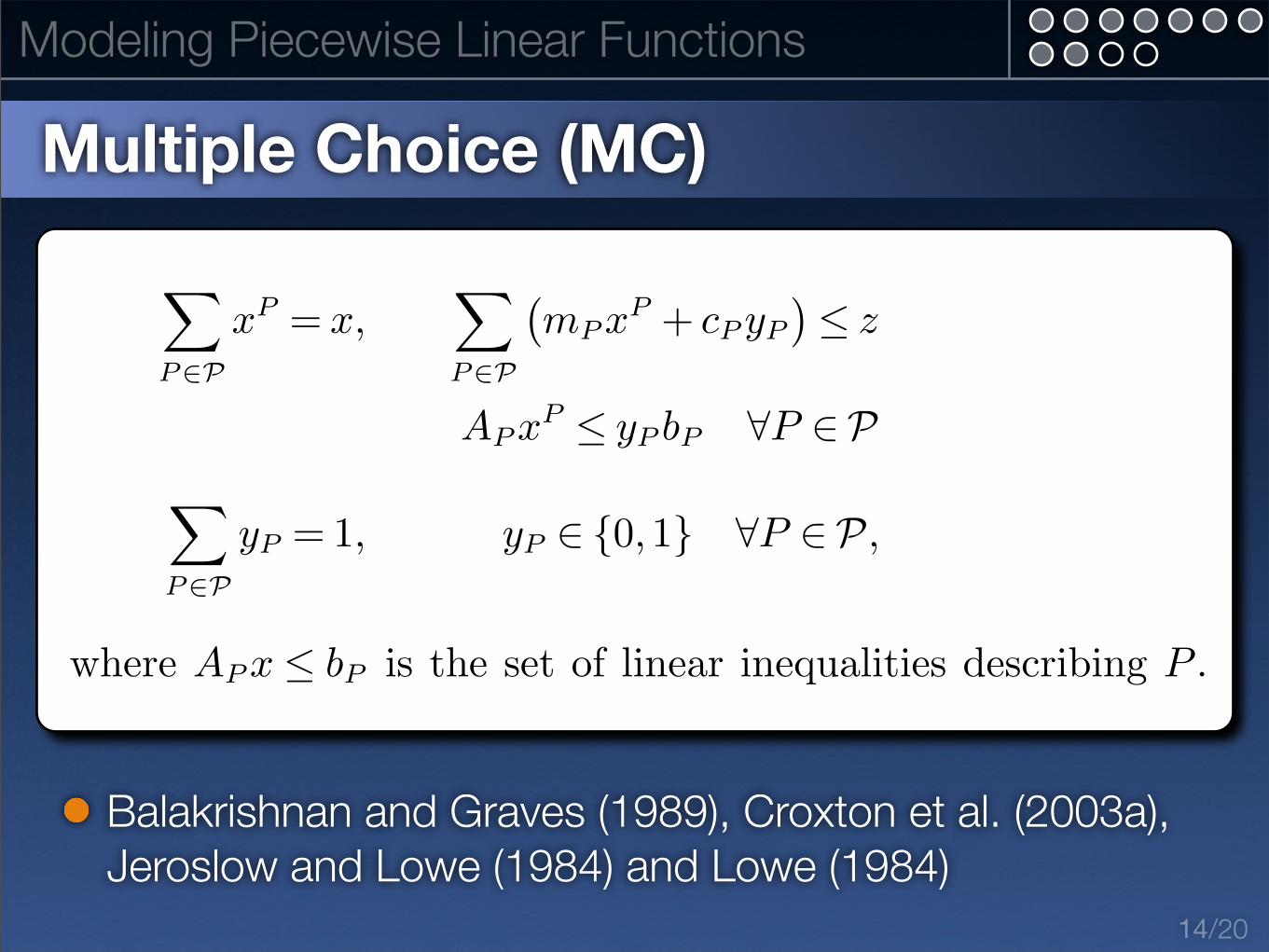
Multiple Choice (MC)
Balakrishnan and Graves (1989), Croxton et al. (2003a),
Jeroslow and Lowe (1984) and Lowe (1984)
14
∑
P∈P
xP = x,∑
P∈P
(mP xP + cP yP
)
≤ z
AP xP ≤ yP bP ∀P ∈P
∑
P∈P
yP = 1, yP ∈ {0,1} ∀P ∈P,
where AP x ≤ bP is the set of linear inequalities describing P . This

/20
Modeling Piecewise Linear Functions
Incremental or Delta (Inc)
Similar for multivariate functions.
Croxton et al. (2003a), Dantzig (1963, 1960), Keha et al.
(2004), Markowitz and Manne (1957), Padberg (2000),
Sherali (2001), Vajda (1964) and Wilson (1998).15
d0 d1 d2 d3 d4
f(d3)0
f(d0)
f(d1)
f(d2)
f(d4)
d0 +K∑
k=1
δk (dk − dk−1) = x
f(d0)+K∑
k=1
δk (f(dk)− f(dk−1))≤ z
δ1 ≤ 1, δK ≥ 0, δk+1 ≤ yk ≤ δk,
yk ∈ {0,1} ∀k ∈ {1, . . . ,K − 1}.

/20
Modeling Piecewise Linear Functions
Strength of the Models
All models give the same LP relaxation bound:
LP relaxation is model of lower convex
envelope (Sharp).
In the absence of other constraints:
All models except for CC have integral vertices
(Locally Ideal).
16

Instances
Transportation problems (10x10 & 5x2).
Univariate: Concave Separable Objective.
Multivariate: Multi-commodity function.
Functions are affine in k segments or in a
k x k grid triangulation (100 instances per
each k=4, 8, 16, 32).
Solver: CPLEX 11 on 2.4Ghz machine.
/20
Computational Results
Instances and Solvers
17
0 1 20
1
2

/20
Computational Results
Univariate Case (Separable)
18
1
10
100
1000
10000
DCC CC MC Inc SOS2 DLog Log
Average Time Solve [s]
Formulation
48
1632

/20
Computational Results
Multivariate Case (Non-Separable)
19
1
10
100
1000
10000
DCC CC MC Inc DLog Log
Average Time Solve [s]
Formulation
4x48x8
16x16

/20
Conclusions
Conclusions and Other Results
Suggestions
For small k use MC or Inc
instead of DCC or CC.
For large k use DLog or
Log.
DLog, DCC and MC can
also be also used for Lower
Semicontinuous Functions.
20
x
y


















