
Microstructure-based numerical modeling of the mechanical...
144
Universidad Polit´ ecnica de Madrid Escuela T´ ecnica Superior de Ingenieros de Caminos, Canales y Puertos Microstructure-based numerical modeling of the mechanical behavior of Mg alloys Tesis doctoral Vicente Herrera Solaz Ingeniero de Caminos 2015
Transcript of Microstructure-based numerical modeling of the mechanical...

Universidad Politecnica de Madrid
Escuela Tecnica Superior deIngenieros de Caminos, Canales y Puertos
Microstructure-based numericalmodeling of the mechanical behavior
of Mg alloys
Tesis doctoral
Vicente Herrera SolazIngeniero de Caminos
2015


Departamento de Ciencia de Materiales
Escuela Tecnica Superior de Ingenieros deCaminos, Canales y Puertos
Universidad Politecnica de Madrid
Microstructure-based numericalmodeling of the mechanical behavior
of Mg alloys
Tesis doctoral
Vicente Herrera SolazIngeniero de Caminos
Directores de la tesis
Javier Segurado EscuderoDr. Ingeniero de Materiales
Profesor Titular de Universidad
Javier Llorca MartınezDr. Ingeniero de Caminos, Canales y Puertos
Catedratico de Universidad
2015


Tribunal nombrado por el Sr. Rector Magfco. de la Universidad Politécnica de Madrid, el día...............de.............................de 20....
Presidente:
Vocal:
Vocal:
Vocal:
Secretario:
Suplente:
Suplente: Realizado el acto de defensa y lectura de la Tesis el día..........de........................de 20 ... en la E.T.S.I. /Facultad.................................................... Calificación .................................................. EL PRESIDENTE LOS VOCALES
EL SECRETARIO


Contents
Agradecimientos III
Resumen V
Acknowledgments VII
Abstract IX
Notation XI
1 Introduction 1
1.1 Importance of Mg alloys . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Deformation mechanisms of Mg alloys . . . . . . . . . . . . . . . . . . . . . 5
1.3 Modeling of polycrystal behavior . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.1 Representative volume element . . . . . . . . . . . . . . . . . . . . 12
1.3.2 Crystal plasticity model . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.3 Mean-field approximations . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.4 Computational homogenization . . . . . . . . . . . . . . . . . . . . 20
1.4 Mechanical behavior of single crystals . . . . . . . . . . . . . . . . . . . . . 21
1.5 Objectives and structure of the thesis . . . . . . . . . . . . . . . . . . . . . 24
2 Models and algorithms 27
2.1 Finite element crystal plasticity model . . . . . . . . . . . . . . . . . . . . 27
2.2 Crystal plasticity model for Mg alloys . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Time discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.2 Subroutine parameters and outputs . . . . . . . . . . . . . . . . . . 38
2.3 Computational homogenization framework . . . . . . . . . . . . . . . . . . 41
I

CONTENTS
2.3.1 Microstructure representation . . . . . . . . . . . . . . . . . . . . . 42
2.4 Inverse optimization strategy . . . . . . . . . . . . . . . . . . . . . . . . . 45
3 Results and discussion 51
3.1 AZ31 Mg alloy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.1.1 Material and processing . . . . . . . . . . . . . . . . . . . . . . . . 51
3.1.2 Mechanical behavior . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.1.3 Optimization strategy and results . . . . . . . . . . . . . . . . . . . 53
3.1.4 Influence of the input information . . . . . . . . . . . . . . . . . . . 63
3.1.5 Influence of the initial set of parameters . . . . . . . . . . . . . . . 67
3.2 Mg alloys containing rare earths . . . . . . . . . . . . . . . . . . . . . . . . 68
3.2.1 Materials and processing . . . . . . . . . . . . . . . . . . . . . . . . 70
3.2.2 Mechanical behavior . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.2.3 Optimization strategy and results . . . . . . . . . . . . . . . . . . . 73
3.3 MN11 Mg alloy at different temperatures . . . . . . . . . . . . . . . . . . . 78
3.3.1 Material and processing . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3.2 Mechanical behavior . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.3.3 Optimization strategy and results . . . . . . . . . . . . . . . . . . . 88
4 Conclusions and future work 95
4.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
A Crystal properties 99
Bibliography 101
List of Figures 115
List of Tables 121
B Personal contributions 123
II

Agradecimientos
En primer lugar agradecer a mis co-tutores D. Javier Segurado y D. Javier LLorca el
que depositaran su confianza en mı para la realizacion de la presente Tesis. Para mı ha
sido un privilegio trabajar bajo su supervision, tanto por el aspecto humano como por el
academico. El desarrollo de la tesis ha sido un camino perfectamente guiado en los aspectos
teoricos por D. Javier Segurado ademas de rigurosamente planificado y estructurado por
D. Javier LLorca. Sin el toque magistral de ambos, sin duda, no hubiese podido alcanzar
el objetivo.
En segundo lugar mostrar mi gratitud a todo el personal del Departamento de Ciencia
de Materiales de la E.T.S. de Ingenieros de Caminos de la U.P.M, desde mis companeros
mas cercanos de la “zona comun”, Maricely, Monica, Daniel, Conchi, Chao y Mariangel,
hasta los profesores del departamento, tecnicos del laboratorio y personal de adminis-
tracion, por su trato amable y disposicion en todo momento.
No puedo soslayar la oportunidad de estancia que se me ofrecio en la Michigan State
University. Gracias a D. Carl Boelhert por brindarmela y por supuesto a Ajith Chakkedath
por ensenarme los entresijos del microscopio electronico de barrido y de la difraccion de
electrones retrodispersados.
Remarcar que la investigacion realizada en esta tesis doctoral se ha realizado en el
marco del proyecto de investigacion “Analisis de la evolucion microestructural y del com-
portamiento mecanico de aleaciones de Mg-Mn-RE” entre la Michigan State University, el
Instituto IMDEA Materiales y la Universidad Politecnica de Madrid, dentro de la Materials
World Network. La investigacion de los equipos espanoles ha sido financiada por el Minis-
terio de Economıa y Competitividad dentro del programa Nacional de Internacionalizacion
de la I+D (proyecto PRI-PIBUS-2011-0990). Sin este apoyo institucional, sin duda, no
habrıa sido posible todo el presente trabajo.
Por ultimo, reconocer y dar las gracias a mi mujer Angela, por apoyarme en la decision
III

Agradecimientos
de doctorarme, ası como por su comprension y aliento en los momentos mas difıciles.
IV
Resumen
Dentro de los materiales estructurales, el magnesio y sus aleaciones estan siendo el foco
de una de profunda investigacion. Esta investigacion esta dirigida a comprender la relacion
existente entre la microestructura de las aleaciones de Mg y su comportamiento mecanico.
El objetivo es optimizar las aleaciones actuales de magnesio a partir de su microestructura
y disenar nuevas aleaciones. Sin embargo, el efecto de los factores microestructurales (como
la forma, el tamano, la orientacion de los precipitados y la morfologıa de los granos) en el
comportamiento mecanico de estas aleaciones esta todavıa por descubrir.
Para conocer mejor de la relacion entre la microestructura y el comportamiento mecanico,
es necesaria la combinacion de tecnicas avanzadas de caracterizacion experimental como
de simulacion numerica, a diferentes longitudes de escala. En lo que respecta a las tecnicas
de simulacion numerica, la homogeneizacion policristalina es una herramienta muy util
para predecir la respuesta macroscopica a partir de la microestructura de un policristal
(caracterizada por el tamano, la forma y la distribucion de orientaciones de los granos) y el
comportamiento del monocristal. La descripcion de la microestructura se lleva a cabo me-
diante modernas tecnicas de caracterizacion (difraccion de rayos X, difraccion de electrones
retrodispersados, ası como con microscopia optica y electronica). Sin embargo, el compor-
tamiento del cristal sigue siendo difıcil de medir, especialmente en aleaciones de Mg, donde
es muy complicado conocer el valor de los parametros que controlan el comportamiento
mecanico de los diferentes modos de deslizamiento y maclado.
En la presente tesis se ha desarrollado una estrategia de homogeneizacion computacional
para predecir el comportamiento de aleaciones de magnesio. El comportamiento de los
policristales ha sido obtenido mediante la simulacion por elementos finitos de un volumen
representativo (RVE) de la microestructura, considerando la distribucion real de formas
y orientaciones de los granos. El comportamiento del cristal se ha simulado mediante
un modelo de plasticidad cristalina que tiene en cuenta los diferentes mecanismos fısicos
V

Resumen
de deformacion, como el deslizamiento y el maclado. Finalmente, la obtencion de los
parametros que controlan el comportamiento del cristal (tensiones crıticas resueltas (CRSS)
ası como las tasas de endurecimiento para todos los modos de maclado y deslizamiento) se
ha resuelto mediante la implementacion de una metodologıa de optimizacion inversa, una de
las principales aportaciones originales de este trabajo. La metodologıa inversa pretende,
por medio del algoritmo de optimizacion de Levenberg-Marquardt, obtener el conjunto
de parametros que definen el comportamiento del monocristal y que mejor ajustan a un
conjunto de ensayos macroscopicos independientes. Ademas de la implementacion de la
tecnica, se han estudiado tanto la objetividad del metodologıa como la unicidad de la
solucion en funcion de la informacion experimental.
La estrategia de optimizacion inversa se uso inicialmente para obtener el compor-
tamiento cristalino de la aleacion AZ31 de Mg, obtenida por laminado. Esta aleacion
tiene una marcada textura basal y una gran anisotropıa plastica. El comportamiento de
cada grano incluyo cuatro mecanismos de deformacion diferentes: deslizamiento en los
planos basal, prismatico, piramidal hc+ai, junto con el maclado en traccion. La validez de
los parametros resultantes se valido mediante la capacidad del modelo policristalino para
predecir ensayos macroscopicos independientes en diferentes direcciones.
En segundo lugar se estudio mediante la misma estrategia, la influencia del contenido de
Neodimio (Nd) en las propiedades de una aleacion de Mg-Mn-Nd, obtenida por extrusion.
Se encontro que la adicion de Nd produce una progresiva isotropizacion del comportamiento
macroscopico. El modelo mostro que este incremento de la isotropıa macroscopica era
debido tanto a la aleatoriedad de la textura inicial como al incremento de la isotropıa del
comportamiento del cristal, con valores similares de las CRSSs de los diferentes modos de
deformacion.
Finalmente, el modelo se empleo para analizar el efecto de la temperatura en el com-
portamiento del cristal de la aleacion de Mg-Mn-Nd. La introduccion en el modelo de los
efectos non-Schmid sobre el modo de deslizamiento piramidal hc+ai permitio capturar el
comportamiento mecanico a temperaturas superiores a 150◦C. Esta es la primera vez, de
acuerdo con el conocimiento del autor, que los efectos non-Schmid han sido observados en
una aleacion de Magnesio.
VI

Acknowledgments
I want to thank my advisors Dr. Javier Segurado and Dr. Javier LLorca for trusting
me to carry out this thesis. It has been a privilege to work under their supervision, in both
human and academic aspects. The development of the thesis has been a path perfectly
guided by Javier Segurado, on the theoretical issues, as well as rigorously planned and
perfectly polished by Javier Llorca. Without the masterstroke of both, I would not have
been able to achieve the goal.
I also want to express my appreciation to all the staff of the Department of Materials
Science of the Civil Engineering School of the Polytechnic University of Madrid, from
my closest colleagues in the common area: Maricely, Monica, Daniel, Conchi, Chao and
Mariangel, to professors of the department, laboratory technicians and administrative staff,
both for their kind treatment and for their availability at any time.
I cannot ignore my stage at Michigan State University. Thanks to Dr. Carl Boelhert
for his support and of course to Ajith Chakkedath for teaching me the intricacies of the
scanning electron microscope and of the electron backscatter diffraction analysis.
I have to acknowledge that the research in this thesis was carried out in the framework
of the research project “Analysis of the microstructural evolution and mechanical behavior
of Mg-Mn-rare earth alloys”, carried out by Michigan State University, IMDEA Materials
Institute and the Polytechnic University of Madrid within the Materials World Network.
The Spanish research has been funded by the Spanish Ministry of Economy and Competi-
tiveness within the National program of internationalization for research and development
(project PRI-PIBUS-2011-0990). This work certainly would not have been all possible
without this institutional support.
Finally, to acknowledge and thank my wife Angela, for supporting me in my decision
of getting a PhD, as well as, for her encouragement in the most difficult moments.
VII

VIII

Abstract
The study of Magnesium and its alloys is a hot research topic in structural materials.
In particular, special attention is being paid in understanding the relationship between mi-
crostructure and mechanical behavior in order to optimize the current alloy microstructures
and guide the design of new alloys. However, the particular effect of several microstructural
factors (precipitate shape, size and orientation, grain morphology distribution, etc.) in the
mechanical performance of a Mg alloy is still under study.
The combination of advanced characterization techniques and modeling at several
length scales is necessary to improve the understanding of the relation microstructure
and mechanical behavior. Respect to the simulation techniques, polycrystalline homog-
enization is a very useful tool to predict the macroscopic response from polycrystalline
microstructure (grain size, shape and orientation distributions) and crystal behavior. The
microstructure description is fully covered with modern characterization techniques (X-ray
diffraction, EBSD, optical and electronic microscopy). However, the mechanical behavior
of single crystals is not well-known, especially in Mg alloys where the correct parame-
terization of the mechanical behavior of the different slip/twin modes is a very difficult
task.
A computational homogenization framework for predicting the behavior of Magnesium
alloys has been developed in this thesis. The polycrystalline behavior was obtained by
means of the finite element simulation of a representative volume element (RVE) of the
microstructure including the actual grain shape and orientation distributions. The crystal
behavior for the grains was accounted for a crystal plasticity model which took into account
the physical deformation mechanisms, e.g. slip and twinning. Finally, the problem of the
parametrization of the crystal behavior (critical resolved shear stresses (CRSS) and strain
hardening rates of all the slip and twinning modes) was obtained by the development of an
inverse optimization methodology, one of the main original contributions of this thesis. The
IX

Abstract
inverse methodology aims at finding, by means of the Levenberg-Marquardt optimization
algorithm, the set of parameters defining crystal behavior that best fit a set of independent
macroscopic tests. The objectivity of the method and the uniqueness of solution as function
of the input information has been numerically studied.
The inverse optimization strategy was first used to obtain the crystal behavior of a rolled
polycrystalline AZ31 Mg alloy that showed a marked basal texture and a strong plastic
anisotropy. Four different deformation mechanisms: basal, prismatic and pyramidal hc+aislip, together with tensile twinning were included to characterize the single crystal behavior.
The validity of the resulting parameters was proved by the ability of the polycrystalline
model to predict independent macroscopic tests on different directions.
Secondly, the influence of Neodymium (Nd) content on an extruded polycrystalline
Mg-Mn-Nd alloy was studied using the same homogenization and optimization framework.
The effect of Nd addition was a progressive isotropization of the macroscopic behavior. The
model showed that this increase in the macroscopic isotropy was due to a randomization
of the initial texture and also to an increase of the crystal behavior isotropy (similar values
of the CRSSs of the different modes).
Finally, the model was used to analyze the effect of temperature on the crystal behavior
of a Mg-Mn-Nd alloy. The introduction in the model of non-Schmid effects on the pyramidal
hc+ai slip allowed to capture the inverse strength differential that appeared, between the
tension and compression, above 150◦C. This is the first time, to the author’s knowledge,
that non-Schmid effects have been reported for Mg alloys.
X

Notation
Throughout the thesis the tensor notation will be used as detailed below
a Vector, components ai
α Second order tensor, components αij
A Fourth order tensor, components Aijkl
I Indentity tensor
AT Transposed tensor
ab Scalar product , (ab) = aibi
a� b Vectorial product
a b (a b)ij = aibj
αa (αa)i = αijaj
Aα (Aα)ij = Aijklαkl
αβ (αβ)ij = αikβkj
α : β (αβ) = αijβij
AB (AB)ijkl = AijmnBmnkl
A : B (A : B) = AijklBijkl
α β (α β)ijkl = αijβkl
XI

Notation
The main variables used throughout the thesis are detailed in the following list
hai: a directions in HCP crystals (in the basal plane)
hci: c directions in HCP crystals (normal to the basal plane)
ha+ ci: a + c directions in HCP crystals
C: Fourth order elastic stiffness tensor
Cα: Fourth order elastic stiffness tensor reoriented after twinning
S: Second Piola-Kirchhoff stress tensor
σ: Cauchy stress tensor
Ee: Green elastic strain tensor
m∗: Schmid factor
a1, a2, a3, c: Axes that define the HCP crystallographic structure
CRSS, ταc : Critical resolved shear stress on the system α
τα0,c: Initial value of the critical resolved shear stress on the system α
ταsat: Saturation value of the critical resolved shear stress on the system α
h0: Initial tangent modulus
qi,j: Matrix describing the latent hardening of a crystal
τα: Resolved shear stress on the system α
n, s: Plane normal and slip direction corresponding to a certain slip plane
F: Deformation gradient tensor
Fe: Elastic part of the deformation gradient tensor
Fp: Plastic part of the deformation gradient tensor
L: Total velocity gradient tensor
Le: Elastic velocity gradient
Lp: Plastic velocity gradient
Lpsl: Plastic velocity gradient related due to slip
Lptw: Plastic velocity gradient related due to twinning
Lpre−sl: Plastic velocity gradient related due to re-slip
Nsl: Number of slip systems
Ntw: Number of twinning systems
Nsl−tw: Number of slip systems that can undergo re-slip
Nre−slip: Number of re-slip systems
XII

Notation
γi: Plastic shear rate on the slip system i
γ0: Reference shear strain rate
γtw: Characteristic shear of the twinning mode
m: Rate-sensitivity exponent
fα: Rate of the volume fraction transformation on the twin system α
f0: Reference twinning rate
Qα: Rotation tensor
fα: Volume fraction of twinned material on the twin system α
i,α: Integer numbers used to define the slip and twin sytems respectively
R(Fe): Tensorial residual function depending on the elastic deformation gradient
Fe
J: Fourth order tensor corresponding to Jacobian obtained as ∂R(Fe)∂Fe
ϕ1, φ and ϕ2: Euler angles defining the rotation of the global reference system to obtain
the crystal reference system
O(β): Objective error function depending on the set of β parameters
J: Jacobian matrix in Levenberg-Marquardt algorithm
λ: Dumping parameter in the linear set of equations in Levenberg-Marquardt
algorithm
β: Set of parameters to be obtained by means of Levenberg-Marquardt
algorithm
xi, yi: Set of n points defining some experimental result
xi, y∗i : Set of n points defining some model prediction corresponding to some
experimental result
η: Non Schmid tensor
XIII

Notation
The main Acronyms used are detailed in the following list
EBSD: Electron BackScatter Diffraction
SEM: Scanning Electron Microscope
RVE: Representative Volume Element
CRSS: Critical Resolved Shear Stress
HCP: Hexagonal Closed Packed
FCC: Face Centered Cubic
BCC: Body Centered Cubic
RD: Rolling Direction
ND: Normal Direction to Rolling Direction
TD: Transverse Direction normal to RD and ND
ED: Extrusion Direction
AZ31: Magnesium alloy containing 3% Al and 1% Zn in wt
RE: Rare earths
MN10: Magnesium alloy containing 1% Mn and 0.5% RE(Nd) in wt
MN11: Magnesium alloy containing 1% Mn and 1% RE(Nd) in wt
XIV

Chapter 1Introduction
1.1 Importance of Mg alloys
The increasing demand for economical use of limited energy resources and the control
over emissions to lower environmental impact have acted as driving forces to introduce
lighter materials in transport. Mg is, obviously, a promising option due to the combi-
nation of low density and good mechanical properties. Mg is the sixth most abundant
element in the earth’s crust, representing 2.7% of the earth’s crust [Okamoto, 1998]. Mg
compounds can be found worldwide and the most common compounds are magnesite
(MgCO3), dolomite (MgCO3� CaCO3), carnallite (KCl � MgCl2� 6H2O). Mg is also found
in seawater [Avedesian and Baker, 1999].
Mg is the lightest of all structural metals, with a density of 1.74 g/cm3, and the third
most-commonly used structural-metal, following steel and Al [Pekguleryuz et al., 2013].
Because of its low density, Mg alloys are excellent candidates for weight-critical applica-
tions. The elastic modulus of polycrystalline Mg is 45 GPa, leading to a specific stiffness
similar to that of Al and Ti, but it presents limited ductility, strength and creep resistance
and these limitations hinder its widespread use in structural applications [Alam et al.,
2011].
Mg is chemically active and can react with other metallic alloying elements to form
intermetallic compounds. These intermetallic phases are found in all Mg alloys, modifying
the microstructure, and hence, the mechanical properties. An extensive review of the most
common alloying elements in Mg can be found in [Avedesian and Baker, 1999, Lyon et al.,
1

Chapter 1. Introduction
2005, Gupta et al., 2011], and a summary of the most relevant elements is presented below.
� Al is one of the most common alloying elements. Addition of Al results in the
enhancement of hardness and strength. It also improves castability. The alloys with more
than 6 wt% of aluminum can be heat treated.
� The addition of Mn enhances the saltwater corrosion resistance of Mg-Al and Mg-
Al-Zn alloys. The low solubility of Mn in Mg limits the amount of Mn that can be added.
Mn is usually incorporated with other alloying elements like aluminum.
� Rare earths, as Nd, Ce, La, Yt, are added to increase the strength (specially at high
temperature), creep and corrosion resistance. Furthermore, it has been observed [Herrera-
Solaz et al., 2014a] that the RE additions have an effect on the recrystallization process
after forming, leading to more random textures. Their use is limited to high-added value
applications, as rare earths are expensive.
� Zn is usually used together with Al to increase the strength without reducing ductility.
Moreover, the presence of Zn with Ni and Fe impurities can also assist to improve the
corrosion resistance.
� Zr acts as an excellent grain refiner when incorporated into alloys containing Zn, Th,
rare earths, or a combination of these elements. However, it cannot be used with Al or Mn
because of the formation of stable intermetallic compounds with these alloying elements.
The mechanical properties of Mg alloys can be greatly improved by adding alloying
elements by means of solid solution and precipitation hardening. As a result, Mg alloys
are currently used in non-structural applications in different sectors including automotive,
aerospace, health care, sports, electronics, etc. [Gupta et al., 2011]. Regarding automotive
applications, Mg has been used in commercial vehicles since the 1930s in the Volkswagen
Beetle, that already contained more than 20 kg of Mg alloys in the transmission housing and
the crankcase. More recently, the environmental and legislative pressure on the automotive
industry to produce lighter and more efficient vehicles have resulted in the surge of the use
of light alloys. Widely used conventional steel parts are being replaced by new advanced
materials such as Mg, Al, and metal-matrix composites. The most common applications
of Mg alloys can be found in parts without structural responsibility like wheel assembly,
gearbox housing and steering wheels (Fig. 1.1(a)), and they are starting to be used in
interior parts such as the seat frame (Fig. 1.1(b)), steering column housing, driver’s airbag
housing, and lock body [Kim and Han, 2008].
With respect to aerospace applications, weight reduction is one of the most critical
2
1.1 Importance of Mg alloys
(a) (b)
(c) (d)
(e)
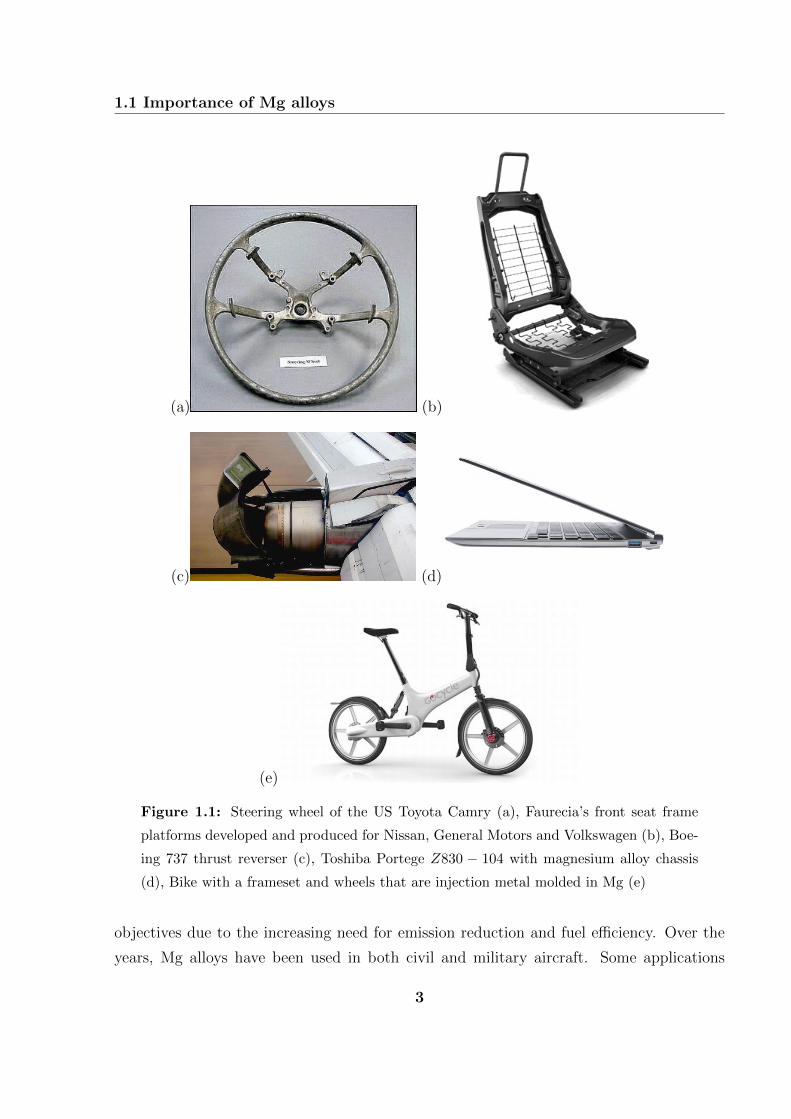
Figure 1.1: Steering wheel of the US Toyota Camry (a), Faurecia’s front seat frame
platforms developed and produced for Nissan, General Motors and Volkswagen (b), Boe-
ing 737 thrust reverser (c), Toshiba Portege Z830 � 104 with magnesium alloy chassis
(d), Bike with a frameset and wheels that are injection metal molded in Mg (e)
objectives due to the increasing need for emission reduction and fuel efficiency. Over the
years, Mg alloys have been used in both civil and military aircraft. Some applications
3
Chapter 1. Introduction
include the thrust reversal (for several Boeing, Fig. 1.1(c)), gearbox (Rolls-Royce), and
helicopter transmission casings. Mg alloys are becoming increasingly attractive for the
aerospace industry after the recent release by the Federal American Aviation (FAA) of a
report required to get Mg in the cabin of aircraft under special conditions approvals. How-
ever, its application in structural parts replacing Ti or Al alloys is still under investigation.
Mg alloys have also been used in health care. They were introduced as orthopedic
biomaterials in the first half of the last century [Earl D. Mcbride, 1938]. However, its
use has been limited because of its low corrosion resistance. Despite this, Mg is very
attractive for bone replacement in biomedical applications because its elastic modulus,
compressive strength and density are closer to those of natural bone than any other metallic
material [Staiger et al., 2006], while its fracture toughness is much higher than that of
hydroxyapatite. In addition, Mg has good biocompatibility and it is biodegradable in
human body fluid by corrosion, thus eliminating the need for another operation to remove
the implant. All these features indicate that Mg are very promising materials for implants
[Song et al., 2008, 2009].
The excellent ability of Mg alloys and Mg composites to be processed by die casting into
intricate shapes resulted in many applications in sports equipment and electronics devices.
They include the handles of archery bows, tennis rackets, golf clubs, bicycle frames (Fig.
1.1(e)), housings of cell phones and cameras, computers, laptops (Fig. 1.1(d)), and portable
media players.
Many more applications in structural components are envisaged for Mg in the future if
the difficulties associated with corrosion resistance and limited mechanical properties are
overcome. Although the mechanical properties of Mg alloys have been studied for many
decades, the body of knowledge on this material is much more limited than that for steel
or Al alloys. There is a lack of fundamental understanding of the key factors controlling
the macroscopic mechanical behavior of Mg and its alloys and this information is critical to
design novel alloys with improved microstructure. This situation is changing rapidly due
to the development of novel experimental techniques to characterize the microstructure
and the deformation mechanisms at the microscopic scale (electron backscatter diffraction,
X-ray computed tomography, in situ mechanical tests, etc.) and of advanced numerical
simulation tools (crystal plasticity, computational homogenization) that can provide a
detailed picture of the dominant deformation and fracture mechanisms in Mg as a function
of the loading conditions.
4

1.2 Deformation mechanisms of Mg alloys
1.2 Deformation mechanisms of Mg alloys
Mg single crystals present a hexagonal closed packed (HCP) lattice, similar to that of
Be, Cd, Ti, Zn and Zr. The unit cell of the HCP lattice is a hexagonal prism which has two
hexagonal bases with sides of length a and height equal to c. Each vertex and the center
of these bases are occupied by one atom and a triangle of 3 atoms is also placed between
these 2 planes, see Fig. 1.2. The c/a ratio of Mg single crystals is 1.624, very close to the
theoretical value of 1.633 for contacting spheres.
Crystallographic features of HCP crystals, such as vectors and atomic plane families,
can be described using a four-value Miller index notation (hkil) in which the third index
i denotes a convenient but degenerate component which is the negative of the sum of the
first two (i = −h − k). The h, k and i index directions are separated by 120◦ and are
parallel to the axes a1, a2 and a3 in the basal plane of the prism. The l component is
perpendicular to the basal plane and parallel to the vertical axis c [Bravais, 1850] (Fig.
1.3 left side).
(a) (b)
Figure 1.2: HCP crystallographic structure
The elastic behavior of Mg single crystals presents transversely isotropic symmetry
due to the HCP lattice. The stiffness tensor C that relates the stress tensor S with the
elastic strain tensor Ee (S=CEe) can be characterized by means of the 5 independent
elastic constants C1111, C1122, C1133, C3333 and C1212, being direction 2 parallel to a2 and
direction 3 to c. The corresponding values are shown in Table 1.1 [Slutsky and Garland,
1957].
5

Chapter 1. Introduction
C1111 C1122 C1133 C3333 C1212
59.4 25.6 21.4 61.6 16.4
Table 1.1: Elastic constants (in GPa) of Mg single crystal at 300K [Slutsky and Garland,
1957].
Plastic deformation, contrary to elastic deformation, is irreversible and two main plastic
deformation mechanisms can be found in Mg, namely dislocation slip and twinning, Fig.
1.4(a). Plastic deformation by slip is due to the movement of dislocations in the atomic
planes with the highest atomic density and along the closed-packed orientations. They
correspond to the basal plane in Mg in three different orientations, namely h2110i, h1210iand h1120i. However, five independent slip systems are necessary to accommodate general
plastic deformation of the lattice [Taylor, 1938, Bishop and Hill, 1951] and basal slip can
only provide two. Thus, plastic deformation in other crystallographic planes with lower
atomic density is also necessary in HCP metals. In the case of Mg and Mg alloys, these
systems are, prismatic slip (f1010gh1210i) and pyramidal hai (f1011gh1210i) or hc+ai(f1010gh1210i), that are also represented on Fig. 1.3.
Figure 1.3: Plastic deformation modes in Mg
In addition to dislocation slip, plastic deformation in Mg (and other low symmetry
crystal structures) can occur by twinning, providing an additional mechanism to accom-
modate c-axis deformation. The availability of twinning deformation modes in HCP is
intimately tied to the c/a ratio [Yoo, 1981]. A mechanical twin formally corresponds to
a sheared volume for which the lattice orientation is transformed into its mirror image
across a so-called twin or habitus plane (oblique dividing plane defined by the twinning
6

1.2 Deformation mechanisms of Mg alloys
direction, see Fig. 1.4 right). The sheared region of the crystal undergoes an irreversible
shear deformation of 0.129 [Zhang and Joshi, 2012]. Twins are easily observed by optical
microscopy as thin lines within the grains which divide the twinned region from the rest
of the crystal. The crystallographic orientation of the crystal within the twinned region is
different from that of the parent grain and this is readily observed by means of electron
backscatter diffraction (EBSD), as shown in Fig. 1.5. The development of twinning is a
process that involves two steps. The first one is the propagation of a thin twin band across
the grain, starting normally from the grain boundary. Afterwards, the twinned region
propagates in the direction perpendicular to the twin plane and eventually the twinned
region occupies most of the parent grain.
Two different twining modes have been reported in Mg, namely extension or tensile
twinning (f1012gh1011i) (the most commonly observed), that appears when the c axis
experiences tension, and contraction or compressive twinning (f2112gh2113i) (less com-
mon), that occurs under compression along the c axis [Reed-Hill and Robertson, 1957a,b,
Yoshinaga et al., 1973]. Contrary to plastic slip that may occur in either direction of the
slip vector, tension twinning only occurs in the direction that promotes the extension of
the c axis, while compression twinning takes place in the direction that leads to compres-
sion of the c axis. Thus, twinning –as opposed to dislocation slip – is a polar deformation
mechanism.
Figure 1.4: Permanent deformation after by slip and twinning.
7

Chapter 1. Introduction
Figure 1.5: EBSD image of Rh showing twins within the grains. [Kacher and Minor,
2014]
Plastic deformation in a given slip system is activated when the resolved shear stress, τα
reaches a critical value, the critical resolved shear stress (CRSS, ταc ), a material parameter
which depends on the chemistry, microstructure and deformation stage of the crystal. The
resolved shear stress on the system α (τα) is obtained by the projection of the stress
tensor S on the corresponding slip plane defined by its plane normal n and slip direction
s, according to
τα = S : s n (1.1)
In the case of a uniaxial loading, the plane normal (n) and the slip direction (s) are
given by the angles λ and ϕ (Fig. 1.6), and equation 1.1 is simplified to
τα = σ cos(λ) cos(ϕ) (1.2)
where m∗ = cos(λ) cos(ϕ) is the so-called Schmid factor.
Regarding twinning activation, the present trend follows the seminal developments by
Kalidindi [1998], Salem et al. [2005] and Staroselsky and Anand [1998] who included twin-
ning along with slip within the constitutive equation. This approach introduced twinning-
induced plasticity through a phenomenological evolution law for the twin volume fraction.
Twinning is modeled as a pseudo-slip mechanism and its activation is controlled by a CRSS
8

1.2 Deformation mechanisms of Mg alloys
Figure 1.6: Geometric configuration to determine the resolved shear stress τα on the
slip system characterized by the normal plane n and the slip direction s under uniaxial
loading σapplied.
acting on the habitus twin plane and along the twinning direction and taking into account
the polar nature of twinning. In Mg alloys, the CRSS of compression twinning is 15 times
higher than that for tensile twining and, thus, very often only tensile twinning is activated
during deformation of Mg and Mg alloys [Zhang and Joshi, 2012].
In cubic materials (either FCC or BCC), general plastic deformation can be accom-
modated by one single slip system. In the case of Mg, the critical resolved shear stress
for the basal mode is much smaller than those of the other slip modes, but basal slip
can only provide two independent slip systems and cannot accommodate general plastic
deformation. This leads to the activation of twinning to accommodate the deformation
perpendicular to the basal plane, being basal slip and tensile twinning the most active
deformation modes in pure Mg and most Mg alloys because the CRSSs to active prismatic
or pyramidal slip are much higher. This trend may be affected, however, by the alloying
elements or temperature leading to changes in the most active modes.
Rolled Mg and Mg sheets present a marked basal texture and the c axis of the Mg
9

Chapter 1. Introduction
hexagonal crystals is aligned with the normal direction (ND) that is perpendicular to the
rolling direction (RD), see Fig. 1.7. The pole figure characteristic of this texture is depicted
in Fig. 1.7 left, where the accumulation of grains in ND shows the orientation of the c axis
along this direction.
Figure 1.7: (Left) Typical pole figure of rolled Mg along ND direction. (Right) Section
A-A corresponding with the plane defined by RD-ND axes. [Zhang and Joshi, 2012]
Under these conditions, the plastic deformation may be dramatically different depend-
ing on the loading direction, Fig. 1.8(a). This is depicted in Fig. 1.8(b), which shows the
tensile stress-strain curves of rolled AZ31 Mg alloy along different orientations with respect
to the normal direction, ND (from 0◦ to 90◦) [Liu et al., 2011]. Specimens tested along
an angle between 0◦ to 30◦ with respect to ND showed relatively lower yield strength due
to activation of extension twinning together with basal slip. In addition, the stress-strain
curves when twinning is active, present a particular “concave up” shape. This is due to the
progressive increases of twin volume fraction and to the final exhaustion when the most
part of the material has been transformed. When angles are larger than 60◦, basal slip and
pyramidal slip are the dominant deformation modes. The reason of that was that rolling
processes provokes that the vertical orientation of the crystals (parallel to c) is the ND,
favoring therefore the twinning activation when the tensile tests are performed in ND and
its inhibition when they are oriented with 90◦ to ND. [Jiang et al., 2008].
10

1.3 Modeling of polycrystal behavior
(a) (b)
Figure 1.8: (a) Orientation of the tensile axis with respect to the normal direction
ND. (b) Representative stress-strain curves of specimens tested at different angles with
respect to ND [Liu et al., 2011]
1.3 Modeling of polycrystal behavior
Structural components of metallic materials are made up of polycrystalline alloys. Poly-
crystal homogenization provides a bridge between micro and macroscale by means of inte-
gration of the microscopic strain and stress fields within the different grains to obtain the
macroscopic stresses and strains in the polycrystal. This kind of approach is applicable to
problems with a clear separation of scales, i.e. those in which the typical length-scale asso-
ciated with the gradients of the mechanical fields at the macroscale is large compared with
the typical length-scale of the polycrystalline microstructure (e.g. the grain or sub-grain
size).
Within this framework, the influence of the microscopic features of the polycrystal
(grain size, shape and orientations as well as elastic constants and the CRSS of the dif-
ferent slip and twinning modes) on the macroscopic response can be taken into account.
Polycrystal homogenization is a very complex, non-linear problem that has been solved with
two different approximations, namely mean-field methods [Taylor, 1938, Sachs, 1928, Moli-
nari et al., 1987, Lebensohn and Tome, 1993] and computational homogenization [Miehe
et al., 1999, 2002, Michel et al., 1999, Lebensohn et al., 2011, Segurado and Llorca, 2013].
Both of them rely on the definition of a Representative Volume Element (RVE) of the
microstructure, a crucial element to bridge micro and macroscales.
11

Chapter 1. Introduction
1.3.1 Representative volume element
The RVE is a sample of a heterogeneous material that fulfills the following conditions:
� It is entirely representative of the microstructure on average, and
� it is sufficiently large for the apparent properties to be independent of the surface
values of traction and displacement, so long as these values are macroscopically uniform
[Hill, 1963].
In essence, the first statement is about the material’s statistics (i.e. spatially homo-
geneous and ergodic), while the second one is a pronouncement on the independence of
effective constitutive response with respect to the applied boundary conditions. In the case
of polycrystals, the RVE is the smallest number of grains over which a measurement can
be made that will yield a value representative of the whole polycrystal. A simple periodic
unit cell is the RVE in the case of materials with periodic microstructure (Fig. 1.9(a)), but
the situation becomes much more complicated in random media, and 2D or 3D complex
cells which contain grains with different sizes, shapes and orientations are necessary (Fig.
1.9(b)).
Very accurate data can be currently obtained of the grain size, shape and orientation
in polycrystals owing to the development of advanced 3D microstructural characterization
techniques (such as serial sectioning and X-ray microtomography together with electron
back-scattered diffraction and X-ray diffraction) [Ludwig et al., 2009, Robertson et al.,
2011, Fernandez et al., 2013, Sket et al., 2014]. Grain size and shape statistical functions,
together with the orientation distribution function (that characterizes the texture) can be
used by means of Monte Carlo lotteries to build up RVEs of the polycrystal microstructure.
The second key ingredient to simulate the polycrystal behavior is the complex behavior
of the single crystals, which should include both plastic deformation by slip and twinning
in the case of Mg. The framework for this task is the well established crystal plasticity
theory [Kroner, 1961, Mandel, 1972, Asaro and Rice, 1977], to describe the homogeneous
and heterogeneous deformation and hardening of single crystals under complex loading
conditions.
12

1.3 Modeling of polycrystal behavior
(a)
(b)
Figure 1.9: Periodic microstructure and the corresponding RVE (a). Random poly-
crystal microstructure and the corresponding RVE (taken from [Segurado and Llorca,
2013]).
1.3.2 Crystal plasticity model
Crystal plasticity estimates the plastic deformation that undergoes a single crystal
under certain boundary conditions. Because plastic deformation, specially under forming
process, can be substantially large, the kinematics of crystal deformation under finite
strains should be established previously.
A region in the three-dimensional space R3 is assigned to the material body B. The
points within this region are called particles or material points. Different configurations
or states of the body correspond to different regions in the 3D space. B0 and B are the
undeformed and deformed configuration at times t0 and t, respectively (Fig. 1.10). The
positions of the material points in the undeformed (or reference) configuration are given
by vector x, whereas those in the deformed (or current) configuration are denoted by y.
13

Chapter 1. Introduction
Thus, the displacement in the deformed configuration is given by u = y � x.
Figure 1.10: Reference or undeformed configuration (B0) and current or deformed
configuration (B). Notation.
The deformation dy of a material line segment dx at x in the reference configuration
is given by means of the deformation gradient tensor F as follows
dy =∂y
∂xdx = Fdx (1.3)
The velocity of the material point x is given by
v =d
dtu = u (1.4)
and the velocity gradient L, which expressed the relative velocity between two positions in
the deformed configuration, can be expressed as function of deformation gradient F as,
L =∂v
∂y= FF−1 (1.5)
The elasto-plastic deformation of the single crystal is accounted for by means of the
multiplicative decomposition [Kroner, 1961]. The single crystal deformation can be decom-
posed into two components Fe and Fp, see Fig. 2.1. The elastic deformation gradient, Fe,
includes the recoverable distortion of the lattice as well as the rigid-body rotations while
Fp accounts for the irreversible plastic deformation induced by plastic slip and twinning.
In this sense, transformation of the reference state by Fp leads to an intermediate config-
uration, Bint, corresponding to a fictitious state of the body in which each material point
14

1.3 Modeling of polycrystal behavior
is unloaded and with its particular lattice coordinate system coinciding with the system in
which the constitutive equations are written.
Figure 1.11: Multiplicative decomposition of the total deformation gradient F into the
elastic, Fe, and plastic, Fp, components.
The transformation from the reference configuration to this intermediate configuration
hence needs to include the flow of material expressed in the constant lattice frame. The
subsequent transformation from the intermediate to the current configuration, correspond-
ing to elastic stretching of the lattice (plus rigid-body rotations), is characterized by the
elastic deformation Fe. Therefore, the overall deformation gradient relating the reference
to the current configuration follows from the sequence of both contributions as
F = FeFp (1.6)
The evolution of the plastic deformation gradient Fp can be expressed as function of
velocity gradient Lp, following the definition 1.5 applied to Fp, leading to
Fp = LpFp (1.7)
and it can be expressed as [Rice, 1971],
Lp =N∑α=1
γαsα nα (1.8)
15

Chapter 1. Introduction
if plastic deformation takes place by dislocation slip. The vectors sα and nα stand, re-
spectively, for unit vectors in the slip direction and the normal to the slip plane of the
slip system α and N is the number of slip systems. The term γα is the shear rate for the
system α which is a function of the resolved shear stress, τα, and the critical resolved shear
stress, ταc
γα = f(τα, ταc ) (1.9)
with
τα = S : (sα nα) (1.10)
ταc = g(γ, γ) (1.11)
where S is the second Piola-Kirchhoff stress tensor and γ and γ stand for the total shear
strain on each system and the shear strain rate, respectively. Equations 1.8,1.9 and 1.11
will be reviewed in more detail in Chapter 3, where this model will be particularized for
Mg alloys.
1.3.3 Mean-field approximations
Both mean-field approximations and computational homogenization are built upon the
assumption of separation of scales illustrated in Fig. 1.12. The constitutive response of ma-
terial in the macroscale is obtained by solving a boundary value problem in a representative
volume element of this microstructure given by the subdomain β0.
The macroscopic (or effective) constitutive equation is given by the relation between S
(the effective first Piola-Kirchhoff stress tensor) and F (the effective deformation gradient
tensor). They can be expressed as
F =1
V0
∫β0
F(x)dV0 (1.12)
S =1
V0
∫β0
S(x)dV0 (1.13)
The mean-field approximation considers that the microfields in each grain can be repre-
sented by a single value, that is the volume-average of the corresponding microfield inside
the crystal. Usually, the microstructure defined in the subdomain β0 is made then by a
set of M inclusions βi inside a matrix, whose size, shape and orientation correspond to the
16

1.3 Modeling of polycrystal behavior
Polycrystalline microstructure at material point 𝒙
Macroscale Sample
𝑥
Computational subdomain 𝜷𝟎
Mean field subdomain 𝜷𝟎
Figure 1.12: Separation of scales between microscale and macroscale.
single crystals in the polycrystal. The effective stress and strain deformation tensors can
be expressed as
F =1
V0
M∑i
∫βi
FdVi =1
V0
M∑i
VihFii (1.14)
S =1
V0
M∑i
∫βi
SdV0 =1
V0
M∑i
VihSii (1.15)
where hFii and hSii stand for the volume-averaged deformation gradient and stress tensor,
respectively, in inclusion i and Vi for the volume of inclusion i in the subdomain.
The different mean-field approximations adopt different hypothesis for the magnitude
of hFii or hSii. The most simple ones are the isostrain (hFii = F) or isostress approaches
(hSii = S). The first one assumes that all the inclusions undergo the same deforma-
tion while the second one proposes that the stress carried by all inclusions is equivalent.
Both models were developed, respectively, by Taylor [1938] and Sachs [1928]. They are
based on assumptions that disregard the shape and local neighborhood of the inclusions
17

Chapter 1. Introduction
and generally violate equilibrium and compatibility conditions, respectively. These models
may provide relatively accurate approximations of the polycrystal behavior if the single
crystals are almost isotropic and posses a large number of slip systems to accommodate the
deformation (FCC and BCC materials), but fail if there are large differences in the strains
or stresses carried by individual grains, as it turns out to be the case in HCP crystals.
Furthermore, although the isostrain approach fulfills the compatibility condition, leads to
a very stiff response. More accurate models were developed in the context of Eshelby’s
approach [Eshelby, 1957] and of particular linearization schemes to obtain the polycrystal
behavior. Among them, the viscoplastic self-consistent scheme (VPSC) has become the
standard tool to homogenize the plastic deformation of polycrystals. This formulation,
based on a ad-hoc linearization of the non-linear single crystal constitutive behavior and
on the use of the linear self-consistent approximation, was first proposed by Molinari et al.
[Molinari et al., 1987] to predict the texture evolution of polycrystalline materials, and it
was later extended and implemented numerically by Lebensohn and Tome [Lebensohn and
Tome, 1993] in the so-called VPSC code. The main features of the VPSC strategy will be
briefly reviewed below.
The VPSC model assumes that the interaction of a grain with the surrounding matrix
can be approximated by the interaction between the grain and a hypothetical homogeneous
medium (HEM), which is characterized by an average constitutive behavior of the entire
polycrystal aggregate. Each grain corresponds to a particular orientation of the ODF and
its volume fraction is taken as the weight of that particular orientation in the ODF. The
grains are represented as ellipsoidal inclusions, Fig. 1.13.2. Implementation of VPSC as FE material model
+ …
+
HEMgrain
≈
inclusion problem→ Eshelby solution: linear !
'pxσ'pxσ
Gran:
op
appVPSCVPSCp :M ε+σ=ε &&HEM:
linearization !??
σ∂
ε∂==
VPSCpggVPSC B:MM&
localization tensors: f (Mg,MVPSC,Eshelby tensor)
ogp
ggop b:M ε+=ε &&
Self-consistent equations:
(also: )
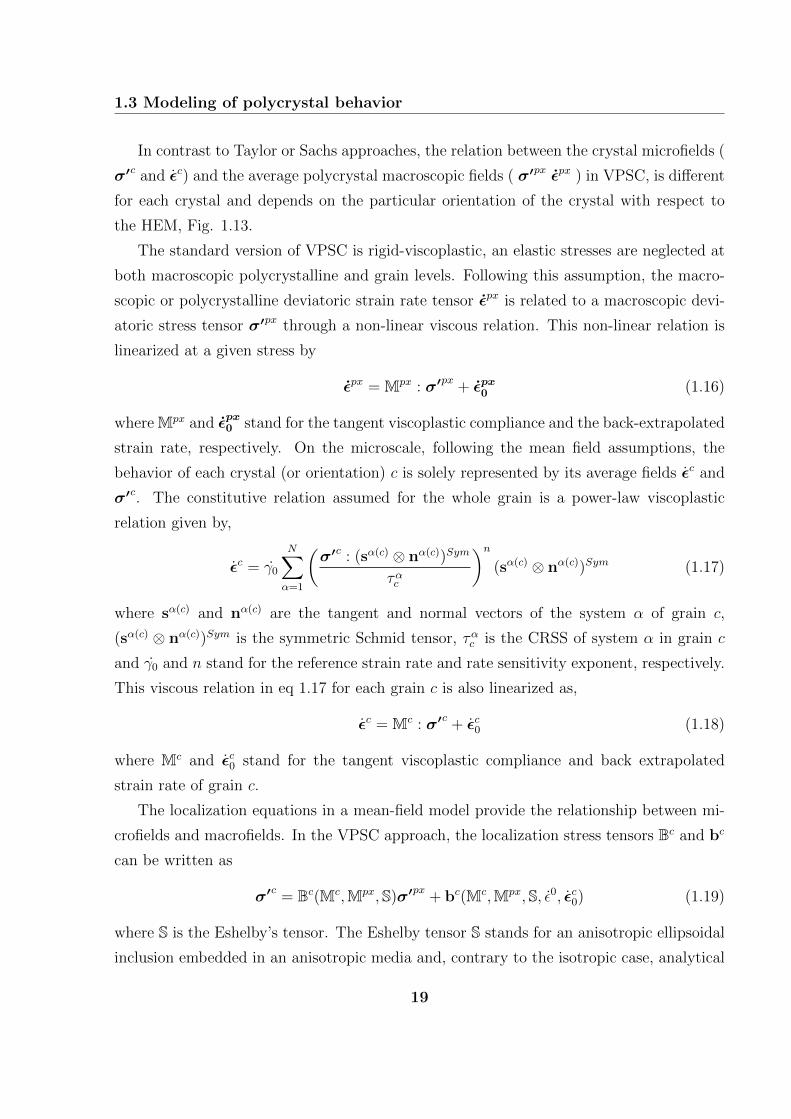
Figure 1.13: VPSC assupmtion where the matrix-grain interaction is approximated by
a ellipsoidal grain (with its particular orientation) within a HEM
18
1.3 Modeling of polycrystal behavior
In contrast to Taylor or Sachs approaches, the relation between the crystal microfields (
σ′c and εc) and the average polycrystal macroscopic fields ( σ′px εpx ) in VPSC, is different
for each crystal and depends on the particular orientation of the crystal with respect to
the HEM, Fig. 1.13.
The standard version of VPSC is rigid-viscoplastic, an elastic stresses are neglected at
both macroscopic polycrystalline and grain levels. Following this assumption, the macro-
scopic or polycrystalline deviatoric strain rate tensor εpx is related to a macroscopic devi-
atoric stress tensor σ′px through a non-linear viscous relation. This non-linear relation is
linearized at a given stress by
εpx = Mpx : σ′px + εpx0 (1.16)
where Mpx and εpx0 stand for the tangent viscoplastic compliance and the back-extrapolated
strain rate, respectively. On the microscale, following the mean field assumptions, the
behavior of each crystal (or orientation) c is solely represented by its average fields εc and
σ′c. The constitutive relation assumed for the whole grain is a power-law viscoplastic
relation given by,
εc = γ0
N∑α=1
(σ′c : (sα(c) nα(c))Sym
ταc
)n(sα(c) nα(c))Sym (1.17)
where sα(c) and nα(c) are the tangent and normal vectors of the system α of grain c,
(sα(c) nα(c))Sym is the symmetric Schmid tensor, ταc is the CRSS of system α in grain c
and γ0 and n stand for the reference strain rate and rate sensitivity exponent, respectively.
This viscous relation in eq 1.17 for each grain c is also linearized as,
εc = Mc : σ′c + εc0 (1.18)
where Mc and εc0 stand for the tangent viscoplastic compliance and back extrapolated
strain rate of grain c.
The localization equations in a mean-field model provide the relationship between mi-
crofields and macrofields. In the VPSC approach, the localization stress tensors Bc and bc
can be written as
σ′c = Bc(Mc,Mpx,S)σ′px + bc(Mc,Mpx,S, ε0, εc0) (1.19)
where S is the Eshelby’s tensor. The Eshelby tensor S stands for an anisotropic ellipsoidal
inclusion embedded in an anisotropic media and, contrary to the isotropic case, analytical
19
Chapter 1. Introduction
expressions are not available. Thus, it has to be computed numerically for each orientation
using Green functions. The particular expressions for the localization tensors Bc and bc
can be found in the literature [Segurado et al., 2012, Lebensohn and Tome, 1993] and are
not given here for brevity.
Polycrystalline fields can be obtained as an average over the crystal fields. For instance,
in the case of strain rates,
εpx =< εc > (1.20)
Finally, combining expression 1.16, 1.18, 1.19 and 1.20, the following self consistent
equations are obtained
Mpx =<Mc : Bc > (1.21)
εpx0 =<Mc : bc + εc0 > (1.22)
This implicit set of equations can be solved iteratively to obtain Mpx and εpx0 . The VPSC
model is used to simulate the polycrystalline response and microfield evolution under a
given strain or stress history. This history is discretized in increments to obtain both the
macroscopic polycrystalline behavior and the microscopic (grain) fields.
1.3.4 Computational homogenization
Mean-field models (and, particularly, the VPSC approximation) have demonstrated
their ability to predict the average flow stress and the texture evolution in polycrystals
and they have been recently used to provide constitutive equations for these materials
within the context of multiscale simulations [Segurado et al., 2012]. However, these models
cannot capture the local stress and strain fields accurately (they generally use only a mean
value to represent the distribution of fields inside the grain) and this may lead to large
differences at the local level for highly anisotropic crystals. In addition, the statistical
treatment of the microstructure does not allow to analyze the influence of the actual grain
shape and local details of the grain spatial distribution (i.e. clusters of second phases or
grain orientations, etc). Under these circumstances, more sophisticated models based on
computational homogenization have to be used to capture these local effects.
Computational homogenization is based on the numerical simulation of the mechanical
behavior of a representative volume element (RVE) of the material microstructure. The
numerical solution of the boundary problem is carried out using different techniques, which
20

1.4 Mechanical behavior of single crystals
include the Fast Fourier Transform method [Michel et al., 1999], recently extended to
viscoplastic polycrystals [Lebensohn et al., 2011], and the finite element method [Miehe
et al., 1999, 2002]).
Three different types of discretization of the RVE can be carried out. The first one
is a voxel-based model in which the RVE is made up by a regular mesh of N � N � Ncubic elements, Fig. 1.14(a). Each cubic element stands for a single crystalline grain and
thus the model can include a large number of grains. While this is important from the
statistical viewpoint, this representation of the microstructure leads to a poor description of
the grain shape and of the strain fields within the grains. Another possibility to represent
the microstructure is depicted in Fig. 1.14(b). The discretization is also carried out
with cubic elements but each crystal was represented with many elements and, thus, the
model includes information about the distribution of grain sizes and shapes within the
polycrystal. In addition, complex deformation fields can be accounted for within each
grain. Nevertheless, the jagged shape of the grain boundaries is not realistic and this leads
to a third type or representation (Fig. 1.14(c)), in which each grain is a polyhedron which
is obtained by means of a Voronoi tessellation. Each polyhedron is discretized with a finite
element mesh to capture the stress and strain gradients within the crystal. This third
representation of the microstructure is obviously more realistic but the higher cost (from
the viewpoint of the generation of the microstructure and of the computational resources)
is not always associated with a dramatic improvement in the accuracy of the predictions
and the RVE in Fig. 1.14(b) is often preferred.
From the viewpoint of the boundary conditions, it is nowadays well established that the
best results are obtained if periodic boundary conditions are applied to the RVE [Segurado
and Llorca, 2002] because the effective behavior derived under these conditions is always
closer to the exact solution (obtained for an RVE of infinite size) than those obtained under
imposed displacements or forces (Huet [1990], Hazanov and Huet [1994]). Further details
about the periodic boundary conditions are explained in section 2.3.
1.4 Mechanical behavior of single crystals
The physical deformation mechanisms in metallic single crystals have been studied in
detail and they are well understood. The elastic behavior is determined by the crystal sym-
metry and the corresponding elastic constants, which are well known. Plastic deformation
21

Chapter 1. Introduction
(a) (b) (c)
Polycrystalline homogenization• Polycrystal behavior is obtained by FEM analysis of a RVE of the
microstructure• Three type of periodic RVEs are considered:
• The grain orientations are generated by MC to be statisticallyrepresentative of ODF
• The microstructures of (b)3 and (c) are synthetically obtained to fitstatistics on grain sizes and shapes
• Periodic boundary conditions are used and load history is introducedby 9 independent terms of F(t) and Σ(t)
3Dream3D
Figure 1.14: Discretization of RVE of polycrystals. (a) Model with 1000 cubic voxels, in
which each one stands for a single crystal. (b) Model containing 100 crystals discretized
with 64000 voxels. (c) Model in which each crystal is represented by a polyhedron
obtained by means of a Voronoi tessellation.
is controlled by dislocation slip and, in some cases, by twinning and it can be highly depen-
dent on the crystal orientation, leading to a strong anisotropy in the plastic response. The
single crystal behavior is modeled within the continuum viewpoint with crystal plasticity
models [Hill, 1966, Rice, 1971, Hill and Rice, 1972], which take into account the geometry
of slip and/or twinning for each material and lattice configuration, see section 1.3.2. The
response of each slip/twinning system is governed by the critical resolved shear stresses
(CRSS) and its evolution with deformation is introduced by means of either phenomeno-
logical [Asaro and Needleman, 1985, Bassani and Wu, 1991] or physically-based models
[Arsenlis and Parks, 2002, Cheong and Busso, 2004, Ma et al., 2006]. Thus, although the
theoretical framework to simulate the mechanical behavior of single crystals is available,
quantitative values of the parameters in these models are difficult to obtain experimentally,
limiting the predictive capabilities of the polycrystal homogenization.
There are three different approaches available to obtain the quantitative values of the
parameters which control the single crystal behavior. The first one is to carry out simple
mechanical tests of microscopic single crystals built from the polycrystal (see Gianola and
Eberl [2009] for a review) by means of focus ion beam milling. The microscopic single
crystals have often a circular section with a diameter in the range 1 to 10 µm and can be
tested in compression with a flat punch in a nanoindenter. By choosing the orientation of
the parent grain, compression tests can be carried out in particular orientations to activate
only one slip system and thus to obtain the CRSS as well as the strain hardening of each
22

1.4 Mechanical behavior of single crystals
slip system. However, this is particularly difficult in single crystals which present a strong
plastic anisotropy (e.g. Mg) because deformation tend to be dominated by softest slip
modes regardless of the initial orientation of the crystal [Prasad et al., 2014, Ye et al., 2011,
Kim, 2011] (Fig. 1.15). Moreover, the quantitative values of the CRSS and of the strain
hardening for each slip system cannot be directly used in the simulation of polycrystals
because of the presence of size effects.
Figure 1.15: Mg micropillar after compression in a direction at 45◦ from the basal plane
normal, showing slip along the basal plane. Courtesy of Yuan-Wei Edward Chang
An alternative strategy, experimentally less challenging, is based on the use of instru-
mented nanoindentation of single crystals with different orientation within the polycrystal
[Liu et al., 2005, Eidel, 2011, Sanchez-Martın et al., 2014]. Testing is very straight forward
in this case but the interpretation of the experimental data to obtain the parameters which
control the behavior of each slip/twinning system is difficult due to the complex stress state
below the indenter and. In addition, nanoindentation results are also size dependent.
Another methodology to obtain the single crystal properties is based on a multsicale
modeling approach. In this case, the effect of alloying elements, precipitates or defects
and dislocation-dislocation interactions on the CRSS and the subsequent hardening are
accounted for using density-functional theory, molecular dynamics or dislocation dynam-
ics. Successful examples of this methodology have appeared recently [Leyson et al., 2010,
Barton et al., 2013] but they are still limited in terms of the mechanisms that can be
accounted for and of the uncertainties associated with the bridge of time and length scales
23

Chapter 1. Introduction
between the different simulation approaches.
Thus, taking into account the limitations of experiments and theory, the most widely
used strategy to obtain the single crystal properties is based on the calibration of the
parameters which control the single crystal properties by fitting experimental results of
polycrystals loaded in different orientations by means of simulations based on mean-field
methods or computational homogenization . The main problem with this strategy is that
the number of parameters to be determined for each single crystal is very large and finding
the optimum parameter set is neither easy nor a unique result is guaranteed. In fact, it is
not unusual to find that different authors report different (or even contradictory) values for
similar materials. HCP metals are the most typical example of these shortcomings because
of the large plastic anisotropy and the coexistence of slip and twinning during plastic
deformation. For instance, Table 1.2 shows the magnitude of the initial CRSS reported by
different groups for the most important slip modes (basal, prismatic and pyramidalhc+ai)and extension twinning in AZ31 Mg alloy. The differences are non negligible from the
quantitative viewpoint and, in addition, some authors [Agnew et al., 2001, Liu et al.,
2011] considered that the initial CRSS for tensile twinning was below the one for basal slip
whereas basal was the softest mode in other studies [Fernandez et al., 2011, Knezevic et al.,
2010, Wang et al., 2010], following the behavior of pure Mg. Obviously, these differences
have very large implications in the dominant deformation mechanisms (and in the texture
development) during deformation and their origin is not easy to assess. Although disparities
in grain size or processing parameters could explain some of the differences in the initial
CRSS reported on the different studies, the spread in the corresponding experimental
results is much smaller than the differences among the CRSS values. This fact suggests
that the disparities in the values proposed for the CRSS should also be closely related to
the methodology used for the model calibration.
1.5 Objectives and structure of the thesis
Polycrystal homogenization is a powerful tool to obtain the mechanical properties of
polycrystalline alloys that relies in three ingredients: an accurate representation of the
microstructure (included in the RVE), a robust homogenization strategy (either based on
mean-field or computational methods) and accurate information about the single crystal
mechanical properties within the polycrystal. A huge progress has been achieved in the
24

1.5 Objectives and structure of the thesis
Deformation mode reference
Fernandez et al. Liu et al. Knezevic et al. Wang et al. Agnew et al.
Basal α α α α α
Prismatic 9α 2α 5α 5α —
Pyramidalhc+ai 13α 15α 6α 8α 3α
Twinning 2α 0.7α 2α 2α 0.5α
α (MPa) 9 — — 15 30
grain size (µm) 13 42 8 — 25-100
Table 1.2: Values of the initial CRSS for different slips modes and tensile twinning in
AZ31 Mg alloy predicted by fitting experimental results on polycrystals with simulations
based on mean-field methods or computational homogenization.
first two areas in the last decades and the Achilles’ heel of polycrystal homogenization
is the lack of a robust methodology (either experimental, theoretical or mixed) to obtain
accurate, quantitative values for the mechanical properties of the single crystal, including
the CRSS of the different slip/twinning modes and the corresponding strain hardening
rates.
The standard approach to obtain this information is based in inverse analysis in which
the single crystal properties are obtained by fitting the predictions the polycrystal homog-
enization model for different loading conditions to experimental results. This is normally
carried out by a trial and error approach and the accuracy of the resulting parameters is
often uncertain because the problem is highly nonlinear, the number of parameters to be
determined for each single crystal is very large and a unique result is not always guaranteed.
The main objective of this thesis is to develop a robust and reliable inverse optimiza-
tion methodology to obtain the single crystal properties from the mechanical behavior of
polycrystals, which can be applied to strongly anisotropic HCP metals deforming by slip
and twinning. The polycrystal behavior will be obtained by means of the finite element
simulation of an RVE of the microstructure and the inverse problem will be solved by
means of the Levenberg-Marquardt method [Levenberg, 1944, Marquardt, 1963], which
is recommended for general non-linear least squares problems in optimization literature
[Dennis and Schnabel, 1996]. The robustness and accuracy of the methodology will be
assessed by comparing the predictions provided by computational homogenization with
independent experimental results. In addition, the influence of the input information on
25

Chapter 1. Introduction
the accuracy of the results will be studied.
This methodology will be applied to two Mg alloys of large technological interest.
Firstly, heavily textured rolled AZ31 Mg sheets, whose mechanical behavior is strongly de-
pendent on the orientation with respect to the rolling direction, will be analyzed. Secondly,
MN10 and MN11 Mg alloys will be studied. These are rare earth-containing alloys which
present a weaker texture and more limited differences among the CRSS of the different slip
modes.
To fulfill these objectives, the thesis is structured as follows. After the introduction,
the second chapter presents the models and algorithms developed to perform the numerical
simulation of Mg and its alloys. This chapter is structured in three sections. The first one
is devoted to the crystal plasticity model adapted for Mg alloys. The second section
presents the computational homogenization strategy for polycrystalline Mg alloys and the
inverse optimization methodology is detailed in section 3. The next chapter presents the
application of this methodology to Mg alloys and also includes the analysis of the robustness
of the approach. Finally, the conclusions and the future work are summarized in chapter
4.
26
Chapter 2Models and algorithms
2.1 Finite element crystal plasticity model
The mechanical behavior of polycrystalline Magnesium alloys can be predicted using
homogenization models that provide the macroscopic response as function of the crystal
behavior and the polycrystalline microstructure (grain size, shape and orientation dis-
tributions). In addition to the use of an appropriate homogenization technique (either
mean-field models or computational homogenization), three elements are fundamental for
an accurate prediction of the behavior of the polycrystal: (1) A constitutive model for
the behavior of the grains that reproduces the actual deformation mechanisms of the crys-
tal, (2) a realistic and representative description of the microstructure and (3), a set of
parameters that accurately describe the deformation of grains using previous model.
In this chapter, the models and algorithms developed to create a computational homoge-
nization framework for predicting the behavior of Magnesium alloys will be described. With
respect to the crystal behavior (1), the general crystal plasticity (CP) framework will be
presented together with the description of the particular CP model developed for Mg and
its numerical implementation in the finite element context. Next, the microstructure repre-
sentation (2) and the computational homogenization technique will be presented. Finally,
the development of an inverse optimization technique to obtain the crystal parameters of
a Mg alloy (3) from actual microstructure and macroscopic tests will be described.
27

Chapter 2. Models and algorithms
2.2 Crystal plasticity model for Mg alloys
A crystal plasticity model has been developed and implemented as a user material
subroutine (UMAT) in the finite element code ABAQUS [Abaqus, 2013]. The UMAT
developed here for Mg alloys is based on the subroutine developed and implemented pre-
viously for Titanium [Segurado and Llorca, 2013]. The original model was able to account
for crystals with different lattices (FCC, HCP, BCC) and several types of hardening laws
but the only plastic deformation mechanism accounted for was dislocation slip. However,
an accurate description of the crystalline deformation in Mg alloys should undoubtedly
include twinning deformation. For this reason, the original model [Segurado and Llorca,
2013] has been enhanced to simulate the behavior of Mg alloys by including a model for
twinning deformation and other particular issues as non-Schmid effects on CRSS.
The crystal plasticity formulation proposed here is based on the multiplicative decom-
position of the deformation gradient in its elastic and plastic parts, according to
F = FeFp (2.1)
The total velocity gradient L (eq. 1.5 in section 1.3.2) can then be expressed as
L = FF−1 = FeFe−1
+ FeFpFp−1
Fe−1
(2.2)
where Lp = FpFp−1stands for the plastic velocity gradient in the intermediate or relaxed
configuration.
The plastic deformation is accommodated by two deformation mechanisms, slip and
twin, being Nsl and Ntw the total number of slip and twinning systems available, respec-
tively. Twinning is included in the crystal plasticity framework using the model developed
by Kalidindi [Kalidindi, 1998]. A material point is divided into two phases, a parent region
and a twinned region (Fig. 2.1), which is formed by a maximum of Ntw subregions. Each
subregion belongs to a given twinning system α and its volume fraction is fα. Thus, the
parent region volume fraction is given by 1�∑Ntw
α=1 fα.
Under this approach the material point can be considered as a composite material in
which the iso-strain hypothesis holds (F and Fe are the same in all phases). The plastic
deformation is the result of three mechanisms and the plastic velocity gradient in the
intermediate configuration contains three terms, related with the slip, twinning and re-slip
mechanisms, Lpsl, Lp
tw, and Lpre−sl respectively.
28

2.2 Crystal plasticity model for Mg alloys
Figure 2.1: Multiplicative decomposition indicating material point subdivision in parent
and twin phases
Lp = Lpsl + Lp
tw + Lpre−sl (2.3)
The slip in the parent phase, Lpsl, is given by
Lpsl =
(1�
Ntw∑α=1
fα) Nsl∑
i=1
γisisl nisl (2.4)
where sisl and nisl stand, respectively, for the unit vectors in the slip and normal direction
to the slip plane considered in the intermediate configuration.
The second contribution, Lptw, is the rate of deformation due to the twin transformation
of a differential volume fraction of parent phase dfα
Lptw =
Ntw∑α=1
fαγtwsαtw nαtw (2.5)
where fα = dfα/dt is the rate of the volume fraction transformation in the twin system α,
sαtw and nαtw are the unit vectors defining the twinning system and γtw is the characteristic
shear of the twinning mode (in the case of tension twinning of Mg alloys, γtw =0.129,
[Zhang and Joshi, 2012]). It is recalled that extension twinning is a polar mechanism and
it will only take place when the applied deformation leads to extension of the c axis of the
HCP lattice.
Finally, the third contribution corresponds to the slip of the transformed regions (here
denominated as re-slip), Lpre−sl, which can be expressed as,
29

Chapter 2. Models and algorithms
Lpre−sl =
Ntw∑α=1
fα
(Nsl−tw∑i∗=1
γi∗si
∗
sl ni∗
sl
)(2.6)
where si∗sl and ni∗
sl stand for the unit vectors in the slip and normal directions to the slip
system i considered and re-oriented due to the twinning transformation of that region. The
reorientation is defined by a rotation tensor Qα
Qα = 2nαtw nαtw � I (2.7)
where I is the second order identity tensor.
It has been experimentally observed that the volume fraction of twinned regions in
many Mg alloy [Fernandez et al., 2013, Kalidindi, 1998, Remy, 1981] reaches a maximum
around∑fα � 0.80. Thus, the re-slip term is activated at a given material point when the
volume fraction of the twinned material at this point reaches 0.80. The number of systems
considered for re-slip, Nsl−tw, might be smaller than the number of original slip systems
Nsl for computational efficiency. Then, the total number of re-slip systems (Nre−slip) will
be obtained by the product of the number of slip systems that can undergo re-slip (Nsl−tw),
and the number of twinning systems (Ntw), that is:
Nre−slip = NtwNsl−tw (2.8)
The crystal was assumed to behave as an elasto-viscoplastic solid in which the plastic
slip rate for a given slip system follows a power-law, according to [Hutchinson, 1976],
γi = γ0
(jτ ijτ ic
) 1m
sign(τ i) (2.9)
where γ0 is a reference shear strain rate, τ ic the CRSS of the slip system i, m the rate-
sensitivity exponent and τ i the resolved shear stress on the slip system i.
Similarly, the twinning rate on the twinning system α, fα, also follows a viscous law
fα = f0
(hταiταc
) 1m
with hτi =
{τ if τ � 0
0 if τ < 0(2.10)
and the transformation rate is set equal to zero if the volume fraction of twinned material
exceeds a saturation value of 0.80 [Kalidindi, 1998]. Mathematically,
30

2.2 Crystal plasticity model for Mg alloys
fα = 0 ifNtw∑α=1
fα � 0.80 (2.11)
Because of the iso-strain approach, the parent and twinned phases at a given material
point are deformed under the same F and Fe and they share the same elastic strain in the
intermediate configuration, given here by the Green-Lagrange strain tensor, Ee,
Ee =1
2
(FeT Fe � I
). (2.12)
The symmetric second Piola-Kirchhoff stress tensor in the intermediate configuration,
S, is obtained in this case from the volume-averaged stress tensors in the different phases
S =
(1�
Ntw∑α=1
fα)
Sparent +Ntw∑α=1
fαSα (2.13)
and the stresses on the parent (Sparent) and twinned (Sα) phases are given by
Sparent = CEe
Sα = CαEe (2.14)
where C stands for the fourth order elastic stiffness tensor of the crystal in its original
orientation and Cα are the corresponding stiffness tensors reoriented after twinning. They
are given by,
Cαijkl = Cα
pqrsQαipQ
αjqQ
αkrQ
αls (2.15)
The resolved shear stress on a slip (τ i) or twinning (τα) system in the parent (i) region
is obtained as,
τ i = Sparent : sisl nisl with τα = Sparent : sαtw nαtw (2.16)
while the resolved shear stress on a slip system in the twinned region (τ i∗) is given by,
τ i∗
= Sα : si∗
sl ni∗
sl (2.17)
Finally, the Cauchy stress can be approximated as
31

Chapter 2. Models and algorithms
σ = J−1FeSFeT � ReSReT (2.18)
under the assumption of small elastic deformations, where J = det(F) and Re stands for
the orthogonal rotation tensor obtained by the polar decomposition of Fe.
The last ingredient of the model consists on the evolution equations of the CRSSs
of each system (terms τc in equations 2.9 and 2.10). The initial values (in absence of
previous plastic deformation) of the CRSSs are given by τ i0,c or τα0,c for a slip system i and
a twin system α, respectively. A phenomenological hardening model is considered for the
evolution of the CRSSs, which is able to reproduce the different stages of single crystal
deformation [Kothari and Anand, 1998]. The evolution of the CRSS τ ic , ταc , τ i∗c for slip,
twin and re-slip systems are then given by equations 2.19, 2.20 and 2.21, respectively,
τ ic = qsl−sl
Nsl∑j=1
h0j
(1� τ j
τ jsat
)asljγjj+ qtw−sl
Ntw∑β=1
h0tw
(1� τβ
τ twsat
)atwjγβj (2.19)
ταc = qtw−tw
Ntw∑β=1
h0tw
(1� τβ
τ twsat
)atwfαγtw (2.20)
τ i∗
c = qsl−sl
Nre−sl∑j=1
h0j
(1� τ j
τ jsat
)asljγjj (2.21)
where the different parameters in these equations define the contributions arising from self
hardening and latent hardening. The self hardening of a given slip (i) or twinning (α)
system correspond to the evolution of the CRSS only due to plastic deformation on that
particular system. This evolution is defined by three terms: the saturation stress, τsat, the
initial hardening rate h0 and the hardening exponent a. The evolution of the CRSS (τc) in
a given system isolated is depicted in Fig. 2.2. This figure shows how the initial value of
CRSS (τo,c) evolves, with a initial tangent modulus of h0, until it reaches the value of τsat.
The latent-hardening contribution to slip due to slip in other systems is introduced
with the coefficient qsl−sl whereas the contribution induced by twinning is given by qtw−sl.
The model only takes into account the effect of twinning on slip and it is assumed that slip
does not influence twinning (qsl−tw = 0) [Capolungo et al., 2009, Zhang and Joshi, 2012].
Three slip modes (basal, prismatic and first pyramidal hc+ai) and tensile twinning have
been included in the model to simulate the deformation of AZ31, MN10 and MN11 Mg
32

2.2 Crystal plasticity model for Mg alloys
Figure 2.2: CRSS evolution by hardening
alloys. These deformation modes are depicted in Fig. 1.3 on page 6, and defined according
to its normal plane n (red line) and slip direction s (blue line). Each deformation mode
comprises several slip/twin systems considering the lattice symmetry of an hexagonal cell
and the resulting set of 24 systems are shown in Table 2.1, both expressed in Bravais
notation (a1,a2,a3,c) and in an orthogonal reference system, more useful for the numerical
implementation. The orthogonal system is defined by three vectors e1, e2, e3, fixed to the
hexagonal cell and defined as e1=a2�c, e2=a2 and e3=c, Fig. 2.3.
Figure 2.3: Different reference systems used to characterize the planes in the hexagonal
lattice. Bravais (left) and orthogonal reference system (right)
2.2.1 Time discretization
The non-linear global FE problem is solved by applying the boundary conditions (loads
or displacements) as a function of a time. The solution is obtained by imposing global
33

Chapter 2. Models and algorithms
Slip mode Slip syst nbrav sbrav nort sort
Basal 1 0 0 0 1 2 -1 -1 0 0 0 1 -0.8661 0.5 0
Basal 2 0 0 0 1 -1 2 -1 0 0 0 1 -0.8661 -0.5 0
Basal 3 0 0 0 1 -1 -1 2 0 0 0 1 0 1 0
Prismatic 1 1 0 -1 0 -1 2 -1 0 1 0 0 0 1 0
Prismatic 2 0 -1 1 0 2 -1 -1 0 0.5 0.8661 0 -0.8661 0.5 0
Prismatic 3 -1 1 0 0 -1 -1 2 0 0.5 -0.8661 0 -0.8661 -0.5 0
Pyrhc+ ai 1 1 0 -1 1 -1 -1 2 3 0.8823 0 0.4708 -0.4543 0.2623 0.8514
Pyrhc+ ai 2 1 0 -1 1 -2 1 1 3 0.8823 0 0.4708 -0.4543 -0.2623 0.8514
Pyrhc+ ai 3 0 -1 1 1 1 1 -2 3 0.4411 0.7641 0.4708 -0.4543 -0.2623 0.8514
Pyrhc+ ai 4 0 -1 1 1 -1 2 -1 3 0.4411 0.7641 0.4708 0 -0.5246 0.8514
Pyrhc+ ai 5 -1 1 0 1 2 -1 -1 3 -0.4411 0.7641 0.4708 0 0.5246 -0.8514
Pyrhc+ ai 6 -1 1 0 1 1 -2 1 3 -0.4411 0.7641 0.4708 0.4543 -0.2623 0.8514
Pyrhc+ ai 7 -1 0 1 1 2 -1 -1 3 0.8823 0 -0.4708 0.4543 0.2623 0.8514
Pyrhc+ ai 8 -1 0 1 1 1 1 -2 3 0.8823 0 -0.4708 0.4543 -0.2623 0.8514
Pyrhc+ ai 9 0 1 -1 1 -1 -1 2 3 0.4411 0.7641 -0.4708 0 0.5246 0.8514
Pyrhc+ ai 10 0 1 -1 1 1 -2 1 3 0.4411 0.7641 -0.4708 0.4543 0.2623 0.8514
Pyrhc+ ai 11 1 -1 0 1 -2 1 1 3 -0.4411 0.7641 -0.4708 0 0.5246 0.8514
Pyrhc+ ai 12 1 -1 0 1 -1 2 -1 3 -0.4411 0.7641 -0.4708 -0.4543 0.2623 0.8514
Tensile Twin 1 1 0 -1 2 -1 0 1 1 0.6838 0 0.7298 -0.7298 0 0.6838
Tensile Twin 2 0 1 -1 2 0 -1 1 1 0.3419 0.5922 0.7298 -0.3649 -0.632 0.6838
Tensile Twin 3 -1 1 0 2 1 -1 0 1 -0.3419 0.5922 0.7298 0.3649 -0.632 0.6838
Tensile Twin 4 -1 0 1 2 1 0 -1 1 -0.6838 0 0.7298 0.7298 0 0.6838
Tensile Twin 5 0 -1 1 2 0 1 -1 1 -0.3419 -0.5922 0.7298 0.3649 0.632 0.6838
Tensile Twin 6 1 -1 0 2 -1 1 0 1 0.3419 -0.5922 0.7298 -0.3649 0.632 0.6838
Table 2.1: Deformation systems considered. Plane normals n and slip directions s are
expressed both in the Bravais coordinated system (a1,a2,a3, c) (sub-index brav) and in
the orthogonal system (e1, e2 and e3) (sub-index ort)
equilibrium at the end of each increment. The global solution for each time increment
is obtained iteratively using a Newton-Raphson approach. A schematic flow chart of the
calculations is depicted in Fig. 2.4 in order to clarify the different loops described below.
Each global iteration of the displacement vector corresponds, at the integration point
level, to a given deformation gradient tensor, F. Let t be the time corresponding to the
last converged increment, then, the variables Ft, Fet , Fp
t and σt (corresponding to total,
elastic and plastic deformation gradients and Cauchy stress, respectively) are known at each
integration point. In addition, the set of internal variables αt defining the CP hardening
evolution are known at time t.
At time t + ∆t, iterative predictions of the global displacement vector are obtained in
34

2.2 Crystal plasticity model for Mg alloys
the context of the global Newton-Raphson scheme. A given global displacement prediction
also corresponds to a prediction of the deformation gradient at each integration point
Ft+∆t. The constitutive equation at that integration point determines the Cauchy stress,
the updated internal variables and the material tangent stiffness matrix (σt+∆t, αt+∆t and∂∆σ∂∆ε
, respectively) as function of the actual predictor Ft+∆t and the converged values of Fet
and αt.
The crystal plasticity routine solves, using an implicit scheme, an algebraical non-linear
set of equations resulting of the integration of eqs. 2.1, 2.2, 2.3, 2.9, 2.17, 2.19, 2.20 and
2.21, between t and t+ ∆t. The inputs and outputs are:
INPUTS: Ft, Fet , Ft+∆t, αt = fγit,fαt , ταc,tg
OUTPUTS: Fet+∆t, σt+∆t,
∂∆σ∂∆ε
, αt+∆t = fγαt+∆t, ...g
The starting point is the integration of the plastic velocity gradient (expression 2.3)
between t and t+ ∆t to obtain the plastic deformation gradient∫ t+∆t
t
Lpdt =
∫ t+∆t
t
FpFp−1 ! Fpt+∆t = exp(∆tLp
t+∆t)Fpt (2.22)
where the tensorial function exp() corresponds to the exponential map operator, [Souza
et al., 2008]. Combining equation 2.22 with the multiplicative decomposition, the elastic
deformation gradient at t+ ∆t can be written as
Fet+∆t = Fe
0 exp(�∆tLpt+∆t) (2.23)
where Fe0 corresponds to
Fe0 = (Ft+∆tF
−1t )Fe
t . (2.24)
If Fet+∆t is renamed simply as Fe, a tensorial residual equation can be written from
2.23 as
R(Fe) = Fe � Fe0 exp(�∆tLp(Fe)) = 0. (2.25)
and the solution of this equation provides the value of Fe. If step increments are sufficiently
small ∆tLp ! I, and the exponential function can be approached by
exp(�∆tLp) � I�∆tLp (2.26)
to reduce the computational cost. In this case, the alternative residual equation is given
by
R(Fe) = Fe � Fe0(I�∆tLp(Fe)) = 0 (2.27)
35
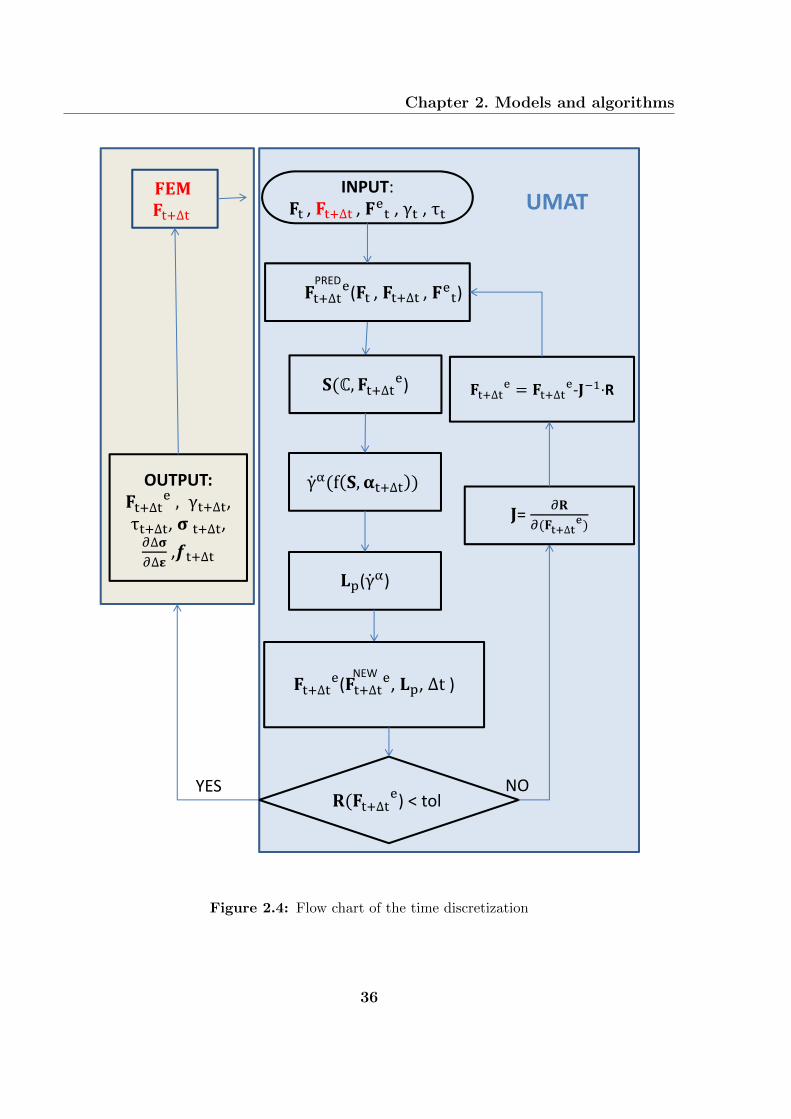
Chapter 2. Models and algorithms
INPUT:, , , ,
( , , )
)
( )
) < tol
OUTPUT:,
, , ,
YES NO
=
‐ ∙R
( , , )NEW
UMAT
PRED
Figure 2.4: Flow chart of the time discretization
36

2.2 Crystal plasticity model for Mg alloys
The implicit equation 2.25 is solved iteratively using a Newton-Raphson scheme, where
the new prediction of the elastic deformation gradient Fenew is given by
Fenew = Fe
old � J−1(Feold) : R(Fe
old) (2.28)
being J the corresponding Jacobian, which is a fourth-order rank tensor defined as
J =∂R(Fe)
∂Fe. (2.29)
An initial predictor for Fe is needed to solve the system. Several approaches can be
followed: a pure elastic predictor (Fe = Fe0), a pure plastic predictor (Fe = Fe
t ), and an
adaptative predictor (Fe = Fe0 exp(�∆tLp
t (Fet ))). The three approaches have been used
depending on the convergence.
In the implementation of the model, the Jacobian matrix to solve eq. 2.25 has been
analytically derived and corresponds to
Jijkl =
[∂R
∂Fe
]ijkl
= δikδjl + ∆tFe0,imEmjpq
[N∑i=1
γisi ni ∂γi
∂Fe
]pqkl
(2.30)
In the absence of hardening, the Jacobian is exact and quadratic convergence is en-
sured. When hardening is considered, the internal variables are actualized at the end of
each Newton-Raphson iteration to keep the implicit nature of eq. 2.25. In this case, the
quadratic convergence of the residual is occasionally lost.
Once the residual equation 2.25 or 2.27 has been solved, Fet+∆t and αt+∆t are obtained
and the new value of Fe is used to compute the Cauchy stress through eq. 2.18.
The final output is the material tangent matrix, defined as
C =∂∆σ
∂∆ε. (2.31)
This equation is evaluated numerically by performing six symmetric perturbations δFi,j of
the total deformation gradient at t+∆t [Kalidindi et al., 1992, Miehe et al., 1999]. The size
of the perturbation is fixed, dε, and each one corresponds to a uniaxial infinitesimal defor-
mation on the final spatial configuration. The resulting perturbed deformation gradient
can be written as
Fper:i,j = δFi,jFt+∆t. (2.32)
A new Newton-Raphson scheme is used to obtain the solution of the equation 2.25 for the
six perturbed deformation gradients, obtaining the corresponding six perturbed Cauchy
37

Chapter 2. Models and algorithms
stress tensors σper:i,j . It should be noted that the computational cost of each of the six
evaluations of the perturbed residual is very small because the converged values Fet+∆t and
αt+∆t previously obtained can be used as predictors, reducing drastically the number of
iterations needed.
The tangent stiffness matrix is finally obtained as(∂∆σ
∂∆ε
)ijkl
�σper:k,lij � σij
dε(2.33)
2.2.2 Subroutine parameters and outputs
The model has been implemented as a material subroutine (UMAT subroutine in
ABAQUS). The only material model parameter that varies from grain to grain is the
orientation which is introduced within the abaqus input file in the definition of a material
property for each grain. All the other material data are properties of the crystal and are
given through an external file crystal.prop that is read by the subroutine only once at the
beginning of the calculation. Next, the necessary parameters in both abaqus input file and
crystal.prop file will be detailed
Definition of orientation
There are several ways of defining the orientation of a body in the three dimensional
space, forming all the possible orientations of the group SO3. In the case of polycrystalline
materials, Euler angles are normally used. These angles are necessary to rotate the global
system (X, Y, Z) to obtain the reference crystal system (X′,Y′,Z′). Each rotation is
depicted in Fig. 2.5
The rotation matrix R = Z1X2Z3, defined in Fig. 2.7 as function of the Euler angles,
relates the new orientation with global coordinate system. The columns of this matrix are
the vectors v1, v2 and v3=v1�v2 that correspond to the vectors [100], [010] and [001]
expressed in the global system (X,Y,Z), Fig. 2.6.
Definition of crystal properties
The input file (named “crystal.prop”) specifies the crystal properties. Within this file,
the following data can be found:
� the parameters of the viscous power law, γ0 and m, see Eq. 2.9
38

2.2 Crystal plasticity model for Mg alloys
Figure 2.5: System reference rotation by Euler angles ϕ1, φ and ϕ2
Figure 2.6: Orientation of single crystal respect to a global system
� The total number of slip system modes N. They are four in HCP crystals: basal,
pyramidal hc+ai, prismatic and pyramidal hai.
� The number of slip systems for each slip mode.
� The number of twinning modes and its corresponding twinning systems.
39

Chapter 2. Models and algorithms
Z1X2Z3 =
c1c3� c2s1s3 �c1s3� c2c3s1 s1s2
c3s1 + c1c2s3 c1c2c3� s1s3 �c1s2s2s3 c3s2 c2
Figure 2.7: Rotation matrix corresponding with Rotations about axes z u and z′, see
Fig. 2.5. The letters c and s stand as the cosine and sine as well as the sub-indices 1, 2
and 3 with the euler angles ϕ1, φ and ϕ2.
� The number of slip modes that can undergo re-slip.
� The plane normal and slip direction of each deformation system, (n1, n2, n3, s1, s2,
s3, slip mode number)
� The hardening coefficients qij between slip and twinning modes, for i=1,..slip+tw
modes and j=1,..slip+tw modes
� The single crystal hardening parameters for Asaro Needleman law: h0, τ0,c and τsat,
Eqs. 2.9 and 2.19.
� Internal parameters to control the Newton-Raphson iterations: toler, toler jac, niter-
max, nitermax jac, strain inc jac, implicit hard. The first two are NR tolerances for
integrating the step (from) and for integrating a perturbation of the step in order
to obtain the Jacobian matrix (from). Nitermax and nitermax jac are the maximum
number of iterations allowed for the integration of step and perturbed step, respec-
tively, and strain inc jac is the size of the strain perturbations for the jacobian.
� asl, atw parameters for Kothari and Anand phenomenological hardening laws, Eqs.
2.19, 2.20 and 2.21.
� The initial fraction of twinning for each twinning system
� The reference twinning rate f0, see eq. 2.10
� The characteristic shear of the twinning mode γtwin, see eq. 2.5
� The maximum fraction of twinning fα allowed and the value of twinning fraction
necessary to start re-slip.
An example of a crystal.prop file for an HCP crystal of a Mg alloy can be found in Appendix
A.
40

2.3 Computational homogenization framework
Subroutine Outputs
Several internal variables αt (STATEV in ABAQUS) are defined and saved at each
Gauss point for calculation and visualization purposes. A list of each of these values and
its position within the vector in which they are stored in Abaqus (statev) is given in Table
2.2:
Variable N STATEV Observations
Fet 9 1-9 -
γα 30 10-39 -
γre−slip 144 40-183 30 = Nsl +Ntw
τα 30 184-213 -
τ re−slip 144 214-357 -
Lpt 9 358-366 -
fαb 9 367-372 Twinning fraction by system
γsl−tot 1 373 Accumulated total slip plastic shear
fb sum 1 374 Twinning fraction sum by crystal
Slip phase orientation 4 375-378Euler angles and its fraction within the
crystal
Twin phase orientation (max) 4 379-382Euler angles in case of twinning system
with higher activity+fraction
Twin phase orientation (max2) 4 383-386Euler angles in case of twinning system
with second higher activity+fraction
Twin phase orientation (max3) 4 387-390Euler angles in case of twinning system
with third higher activity+fraction
γtw−tot 1 391Accumulated total twinning plastic
shear
γre−slip−tot 1 392 Accumulated total re-slip plastic shear
Slip Activities 4 393-396
Twinning Activities 1 397
Re slip Activities 4 398-401
Table 2.2: Internal variables (STATEV) saved at each point of convergence and for
each Gauss point
2.3 Computational homogenization framework
The mechanical behavior of different polycrystalline Mg alloys will be determined us-
ing a computational homogenization from the crystal behavior (described above) and the
41
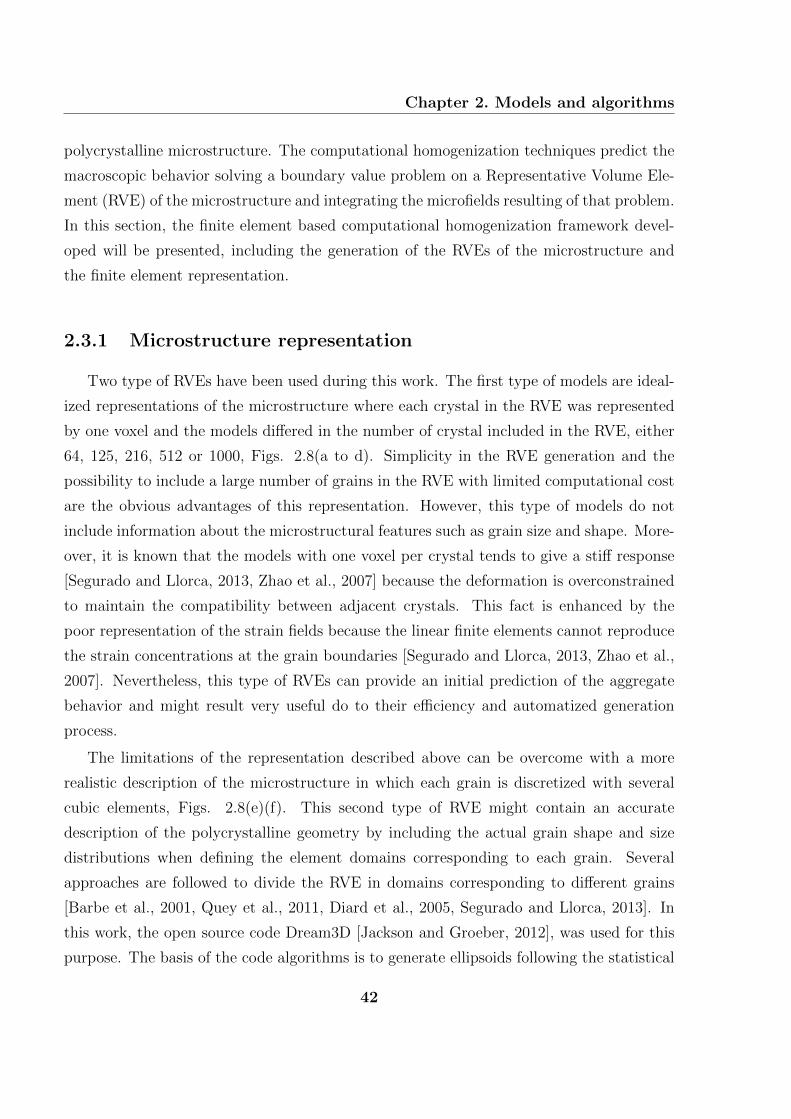
Chapter 2. Models and algorithms
polycrystalline microstructure. The computational homogenization techniques predict the
macroscopic behavior solving a boundary value problem on a Representative Volume Ele-
ment (RVE) of the microstructure and integrating the microfields resulting of that problem.
In this section, the finite element based computational homogenization framework devel-
oped will be presented, including the generation of the RVEs of the microstructure and
the finite element representation.
2.3.1 Microstructure representation
Two type of RVEs have been used during this work. The first type of models are ideal-
ized representations of the microstructure where each crystal in the RVE was represented
by one voxel and the models differed in the number of crystal included in the RVE, either
64, 125, 216, 512 or 1000, Figs. 2.8(a to d). Simplicity in the RVE generation and the
possibility to include a large number of grains in the RVE with limited computational cost
are the obvious advantages of this representation. However, this type of models do not
include information about the microstructural features such as grain size and shape. More-
over, it is known that the models with one voxel per crystal tends to give a stiff response
[Segurado and Llorca, 2013, Zhao et al., 2007] because the deformation is overconstrained
to maintain the compatibility between adjacent crystals. This fact is enhanced by the
poor representation of the strain fields because the linear finite elements cannot reproduce
the strain concentrations at the grain boundaries [Segurado and Llorca, 2013, Zhao et al.,
2007]. Nevertheless, this type of RVEs can provide an initial prediction of the aggregate
behavior and might result very useful do to their efficiency and automatized generation
process.
The limitations of the representation described above can be overcome with a more
realistic description of the microstructure in which each grain is discretized with several
cubic elements, Figs. 2.8(e)(f). This second type of RVE might contain an accurate
description of the polycrystalline geometry by including the actual grain shape and size
distributions when defining the element domains corresponding to each grain. Several
approaches are followed to divide the RVE in domains corresponding to different grains
[Barbe et al., 2001, Quey et al., 2011, Diard et al., 2005, Segurado and Llorca, 2013]. In
this work, the open source code Dream3D [Jackson and Groeber, 2012], was used for this
purpose. The basis of the code algorithms is to generate ellipsoids following the statistical
42

2.3 Computational homogenization framework
(a) (b) (c)
(d) (e) (f)
Figure 2.8: Different RVE of the polycrystal microstructure. (a)(b)(c)(d) Voxel repre-
sentation with 64, 216, 512 and 1000 cubic finite elements in which each one stands for a
grain respectively. (e)(f) Realistic RVE containing 584 and 300 crystals discretized with
� 7 and 200 cubic finite elements per grain respectively.
distribution of grains and the compact them into the RVE [Donegan et al., 2013, Tucker
et al., 2012, Wang et al., 2011].
With independence of the geometrical microstructure representation, the sole subdi-
vision of the grain with several finite elements improves the model accuracy because the
constrains imposed by neighboring grains are reduced leading to a better representation of
the strain gradients. As an example of this type of RVE’s, the models on Figs. 2.8(e)(f)
are generated using Dream3D [Jackson and Groeber, 2012] and contained 584 and 300
grains, respectively. On average, each grain was discretized with 7 (Fig. 2.8(e)) or 200
(Fig. 2.8(f)) voxels, respectively. The grains were equiaxed and the grain size followed
a log-normal distribution with an average grain volume equal to the RVE divided by the
number of grains.
43

Chapter 2. Models and algorithms
In summary, for this second type of RVE, grain microfields are accounted and the ef-
fective behavior predictions are more accurate. However, the computational cost of these
models is much higher, specially when a large number of grains is used to represent accu-
rately the texture.
The last ingredient in the RVE generation is the representation of the actual grain
orientation distribution (texture). The method followed here was the same for both types of
RVEs. The orientation of each grain was randomly generated following a given orientation
distribution function (ODF) of the experimental textures, obtained by either EBSD or
X-ray diffraction. The ODFs definition consisted of a list of orientations (three Euler
angles) and weigths that correspond to the particular grains orientations and volumes or
to a discrete representation of the orientation space SO3 in a grid. M-tex [Bachmann
et al., 2010], was used to treat, operate and graphically represent ODFs while home-made
algorithms were used to generate the random orientations from the ODF using a Monte-
Carlo model.
Finite element simulation of the RVE
The mechanical behavior of the polycrystalline RVE was obtained by the finite element
method. The two type of voxel representations of the RVE presented above are directly
used as finite element meshes (one voxel corresponding to one cubic finite element). Pe-
riodic boundary conditions were applied on the cubic cell faces because the homogenized
polycrystal behavior derived under these conditions is always closer to the exact solution
(provided by an RVE of infinite dimensions) than those obtained with imposed displace-
ments or forces [Segurado and Llorca, 2002]. The periodic boundary conditions assume
that the RVE deforms as a jigsaw puzzle and that the whole space can be filled with a peri-
odic translation of the RVE along the three Cartesian axes. If the initial cube length is L,
and the origin of coordinates is located at one corner, the three concurrent edges of the cu-
bic RVE define an orthogonal basis e1, e2 and e3 with corresponding coordinates x1, x2, x3.
The periodic boundary conditions link the local displacement vector u of the nodes on
opposite faces of the cubic RVE with the far-field macroscopic deformation gradient F
according to,
44

2.4 Inverse optimization strategy
u(x1, x2, 0)� u(x1, x2, L) = (F� I)l3
u(x1, 0, x3)� u(x1, L, x3) = (F� I)l2
u(0, x2, x3)� u(L, x2, x3) = (F� I)l1
(2.34)
where li = Lei. The far-field deformation gradient F applied to the RVE is obtained by
prescribing the displacements of three master nodes Mi corresponding to three different
faces of the RVE,
u(Mi) = (F� I)li. (2.35)
If some components of the far-field deformation gradient are not known a priori (mixed
boundary conditions, as in under uniaxial tension), the corresponding components of the
effective stresses σ are set instead. This is carried out by applying a nodal force Pj to the
master node Mi and degree of freedom j according to
Pj(Mi) = (σei)jAi (2.36)
where Ai is the projection of the current area of the face perpendicular to ei in this
direction.
Finally, to postprocess the model results, the effective deformation gradient is obtained
by inserting the resulting displacement of master nodes on equation 2.35. The macroscopic
Cauchy stresses acting on any cube surface can be computed by dividing the reaction forces
Fj of the master nodes Mi by the actual area of the face perpendicular to that master node
Ai.
σij =FjAi
(2.37)
2.4 Inverse optimization strategy
The mechanical behavior of the polycrystal can be obtained by the finite element sim-
ulation of the RVE and compared with the experimental results. The objective of the
optimization strategy is to obtain the set of parameters that determine the behavior of the
single crystal (the initial CRSS in each slip or twinning mode and those included in the
hardening laws given by equations 2.19, 2.20 and 2.21) which provide the best possible fit
45

Chapter 2. Models and algorithms
between the numerical simulations of the polycrystal and the experimental data. At least
12 parameters have to be determined in the case of Mg alloys which deform by basal, pris-
matic and pyramidal hc+ ai slip together with tensile twinning, which correspond to τ0,c,
τsat and h0 for each deformation mode. The optimization process is a challenge because of
the large number of parameters and of the strong non-linearity of the problem, which is
more critical in the case of anisotropic crystals which deform by slip and twinning.
The optimization procedure is based on the Levenberg-Marquardt method [Levenberg,
1944] [Marquardt, 1963], which was adapted to be used in the context of polycrystal homog-
enization. Let xi, yi be a set of n points defining some experimental result (i.e. strain-stress
curve of the polycrystal) and let y∗i = f(xi;β) be the model prediction of that experiment
which is defined by a set of m parameters β. The Levenberg-Marquardt method is an op-
timization method to obtain the set of parameters β that minimizes the objective function
O(β) defined as
O(β) =n∑i=1
jyi � f(xi, β)j = ky � f(β)k . (2.38)
Assuming a small perturbation δ of the model parameters β, the model can be linearized
with respect to the perturbation, leading to
f(β + δ) � f(β) + Jδ (2.39)
where
Jij =∂f(xi,β)
∂βjwith 1 � i � n and 1 � j � m (2.40)
is the Jacobian matrix, obtained by evaluating the derivatives of f with respect to the set
of parameters β on the points xi. Thus, the value of the objective function O at the point
β + δ can be written as
O(β + δ) � ky � f(β)� Jδk. (2.41)
Levenberg and Marquardt minimized this objective function by adding a dumping
factor λ to the usual expression of steepest descent [Levenberg, 1944, Marquardt, 1963],
leading to the following linear set of equations
46

2.4 Inverse optimization strategy
(JTJ + λ diag(JTJ))δ = JT [y � f(β)] (2.42)
whose solution δ provides the new set of parameters that minimizes the objective function.
In the absence of the dumping parameter λ, the iterative process to solve the non-linear set
of equations often stops because the Jacobian matrix becomes singular. This drawback can
be overcome with the addition of the (non-negative) damping factor, λ, which is adjusted
at each iteration. If the reduction of the objective function O is rapid, smaller values of
λ can be used in each iteration, bringing the algorithm closer to the fast Gauss-Newton
algorithm. On the contrary, higher λ values can be used when the objective function O is
not reduced. This procedure is repeated iteratively until the error in the objective function
reaches the desired value. In each iteration, the Jacobian matrix J (eq. 2.40) has to be
computed, the damping parameter selected and the linear set of equations in eq. 2.42
solved.
The Levenberg-Marquardt method can be easily applied if there is an analytical expres-
sion of f and its derivatives. This is not the case, however, in the case of computational
homogenization where the function y∗i = f(xi;β) is often the macroscopic stress-strain
curve of the polycrystal under certain boundary conditions which is obtained by the finite
element analysis of the RVE with a set of parameters β which define the single crystal
properties. In order to compute the Jacobian matrix (eq. 2.40), one of the parameters is
perturbed by ∆βj (in this work the value of ∆βj was of 0.05%βj, obtaining similar results
with 0.01%βj)
β∗j = β + f0, 0, � � � ,∆βj, � � � , 0gT . (2.43)
and the response of the perturbed model, f(xi;β∗j), is determined by the finite element
analysis of the RVE. This procedure is repeated for each parameter and curve in the model
and the resulting Jacobian matrix is given by,
Jij =∂f(xi;β)
∂βj� f(xi;β
∗j)� f(xi;β)
∆βj(2.44)
This step is very costly from the computational viewpoint because the number of finite
element analyses is proportional to the number of the macroscopic stress-strain curves
included in the optimization process and to the number of parameters to optimize. For
47

Chapter 2. Models and algorithms
this reason, a hierarchical strategy was developed for the optimization strategy, that began
using very simple RVE and increased progressively the complexity of the RVE.
The ability of the Levenberg-Marquardt method to find global minimizers of the error
will depend on the parameter λ chosen on each iteration. Starting with an arbitrary value
(e.g. λ = 1) in the first iteration, three different damping parameters, corresponding to
2λ, λ and 0.5λ, are selected and the objective function (eq. 2.38) is computed for the
three damping parameters. The damping parameter which leads to a minimum error O
is selected as the starting damping parameter for the next iteration and the procedure is
repeated until the objective function O is below a given tolerance or when the difference
in the error between two consecutive steps is negligible. In the latter case, the new λ to
begin the next iteration will be either 8 times higher or smaller than the previous one. It
will be higher if the smallest error was achieved when optimization was carried out using
2λ as the damping constant and it will be smaller if the smallest error was obtained with
0.5λ.
The optimization algorithm based on the Levenberg-Marquardt method has been pro-
grammed in Python and runs as an Abaqus [Abaqus, 2013] script that reads all the nec-
essary input information (experimental stress-strain curves, microstructural information,
etc.) and automatically executes the different tasks in the optimization process: generation
of the input files for the finite element analysis with the perturbed parameters, execution
and post-processing of the finite element simulations of the RVE, assembly of the Jacobian
matrix, selection of damping parameters, solving of the linear equation set for the new
set of parameters, and checking whether the error in the objective function has reached
the desired limit to finish the process or begin another iteration, Fig. 2.9. As indicated
above, different RVEs can be used in the optimization loop to speed up the process. The
first iterations can be performed with RVEs containing 1 voxel per crystal, Figs. 2.8(a,b,c
and d) and the best parameters obtained with these RVEs are used as input for the more
realistic RVE of the microstructure, Figs. 2.8(e)(f), in the final steps of the optimization
process.
48

2.4 Inverse optimization strategy
YES
NO → modify k
INPUT: • Experimental curves y • Model curves f(β) • Initial parameters (β)
( ) = ‖ − ( )‖
Compute Error O(β) between model and experimental curves
Calculation of perturbations: Parameters →β*
j = β + {0, 0, · · · , ∆βj , · · · , 0} Number of calculations →N = Nparameters×Ncurves For j=1 to N Abaqus calculation as function of (β*
j, input file, crystal prop, umat) Save results f(β*
j) for each j End
= ( , )
Jacobian ( ) assembly:
( + ( )) = − ( )
( ) = ‖ − ( )‖
Solve Levenberg Marquardt equation for each lambda (λ1=λ/k, λ2=λ, λ3=λ*k); (k=2, λ0=1) for i=1 to 3
( ) = + ( ) end for i=1 to 3 Abaqus calculation as function of (β'
j) Save results f(β'
i) for each i end Choose the best ∗ that minimizes ( )
( ) < ( )
NO
( ) <
END βi
’=βfinal
YES
β = β ( ) = ( ) ( ) = ( ) = ∗
New iteration:
Figure 2.9: Flow chart of Levenberg-Marquardt optimization algorithm.
49

50

Chapter 3Results and discussion
3.1 AZ31 Mg alloy
3.1.1 Material and processing
The methodology presented in section 2.4 of the previous chapter was applied to deter-
mine the single crystal properties of a polycrystalline AZ31 Mg alloy at room temperature
[Herrera-Solaz et al., 2014b]. The material was obtained from a plate of 25.4 mm in thick-
ness processed by hot rolling [Dogan et al., 2013]. The chemical composition is summarized
in Table 3.1.
Al Zn Mn Ca Si
2.5-3.5 0.7-1.3 0.20 min 0.04 max 0.30 max
Cu Ni Fe Others Mg
0.05 max 0.05 max 0.05 max 0.03 max Remaining
Table 3.1: Chemical composition of the AZ31 alloy in wt.%.
The average grain size was 25 µm and the pole figure of the as-rolled material is plotted
in Fig. 3.1(a). It shows the strong basal texture typical of rolled Mg alloys, with the c
axis parallel to the normal direction (ND), as well as the spread prismatic poles along the
rolling (RD) and transverse (TD) directions.
51

Chapter 3. Results and discussion
(a)
min:0.04
max:9.3
{0001}
ND
RD
min:0.21
max:2.6
{10−10}
ND
RD
1
2
3
4
5
6
7
8
9
10
(b)
min:0.02
max:9.2
{0001}
ND
RD
min:0.19
max:2.6
{10−10}
ND
RD
1
2
3
4
5
6
7
8
9
10
Figure 3.1: Pole figures of the rolled AZ31 Mg alloy. (a) Experimental texture. (b)
Reduced equivalent initial texture with 512 orientations used as input to create the RVE.
The numbers in the legend stand for multiples of random distribution.
3.1.2 Mechanical behavior
Specimens for tension and compression experiments along different orientations were
machined from the plate. Flat dog-bone specimens were used for the tensile tests and
the dimensions of the gage section were 8 � 3 � 1.5 mm3. Compression specimens were
rectangular prisms with the dimensions of 4�4�8 mm3. Mechanical tests were carried out
using an MTS test frame at an average strain rate of 5� 10−4 s−1 . Strains were measured
with extensometers of 8 mm and 3 mm gauge length, which were attached to the tension
and compression specimens, respectively.
The material was deformed in uniaxial compression and uniaxial tension along ND and
also in uniaxial tension along RD. Additional tests were carried out in uniaxial tension in
the RD-ND plane at 45◦ from both orientations (Fig. 3.2). Three tests were carried out
in each orientation and/or loading direction (tension/compression).
The true stress - true strain curves in tension and compression in the ND, and in tension
52

3.1 AZ31 Mg alloy
Figure 3.2: Schematic of the loading directions for the mechanical tests of the rolled
plate of AZ31 Mg alloy.
in the RD directions are plotted in Fig. 3.3, together with the ones corresponding to the
tensile tests in the RD-ND plane at 45◦ from both orientations. The three experimental
curves for each test are included and they show that the experimental scatter was minimum.
These curves show the strong plastic anisotropy of Mg alloys, which is triggered by the
limited number of slip systems and by the polar nature of extension twinning, which is only
activated when deformation leads to an extension of the c axis. As a result, deformation
of wrought Mg alloys is markedly dependent on the orientation, and different slip systems
(and in different order) are activated as a function of the loading direction (either tension
or compression).
3.1.3 Optimization strategy and results
The accuracy of the optimization procedure depends on the input information used
to compute the single crystal properties, namely the direction (tension or compression)
and orientation of the mechanical tests of the polycrystal. It is obvious that if one of
the slip/twinning mode is not activated in any of the input mechanical tests, it will be
impossible the determine accurately the properties of this mode. Thus, the mechanical tests
have to be independent (should lead to the activation of different deformation mechanisms)
and the minimum number of tests to characterize the single crystal behavior will depend
on the number of active slip and twinning modes. Most papers devoted to determine
the single crystal properties of Mg alloys use two independent stress - strain curves of
the polycrystal [Fernandez et al., 2013, Wang et al., 2010, Agnew et al., 2001] but these
studies do not demostrate that this number is enough. The critical test to find out the
53
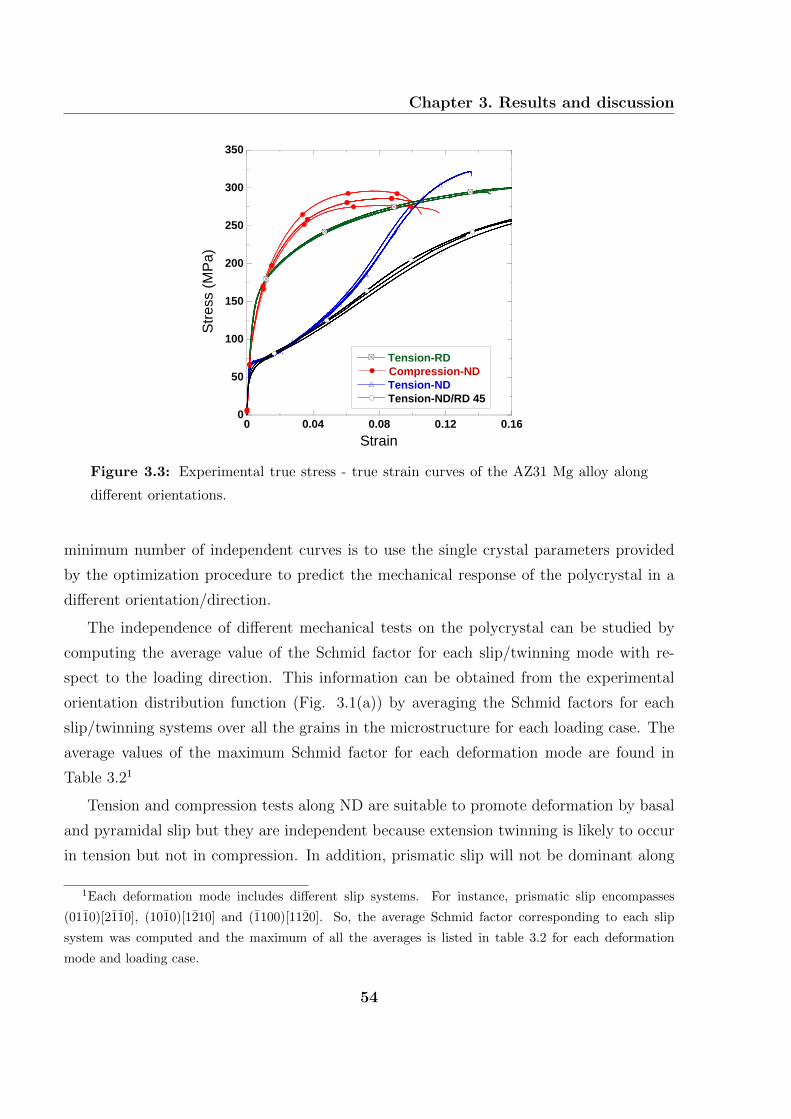
Chapter 3. Results and discussion
0
50
100
150
200
250
300
350
0 0.04 0.08 0.12 0.16
Tension-RDCompression-NDTension-NDTension-ND/RD 45
Stre
ss (M
Pa)
Strain
Figure 3.3: Experimental true stress - true strain curves of the AZ31 Mg alloy along
different orientations.
minimum number of independent curves is to use the single crystal parameters provided
by the optimization procedure to predict the mechanical response of the polycrystal in a
different orientation/direction.
The independence of different mechanical tests on the polycrystal can be studied by
computing the average value of the Schmid factor for each slip/twinning mode with re-
spect to the loading direction. This information can be obtained from the experimental
orientation distribution function (Fig. 3.1(a)) by averaging the Schmid factors for each
slip/twinning systems over all the grains in the microstructure for each loading case. The
average values of the maximum Schmid factor for each deformation mode are found in
Table 3.21
Tension and compression tests along ND are suitable to promote deformation by basal
and pyramidal slip but they are independent because extension twinning is likely to occur
in tension but not in compression. In addition, prismatic slip will not be dominant along
1Each deformation mode includes different slip systems. For instance, prismatic slip encompasses
(0110)[2110], (1010)[1210] and (1100)[1120]. So, the average Schmid factor corresponding to each slip
system was computed and the maximum of all the averages is listed in table 3.2 for each deformation
mode and loading case.
54

3.1 AZ31 Mg alloy
the ND direction because basal slip and twinning under tension have higher Schmid factors
but it is likely to play a major role under RD tension. Thus, these three mechanical tests
are good input candidates for the optimization procedure. The table also includes the
average values of the maximum Schmid factor for the tests carried out in the RD-ND
plane at 45◦ from both orientations. This case, in which all deformation modes can be
active, will be used to validate the optimization procedure.
Deformation mode Schmid factor
ND ND RD RD/ND45
Tension Compression Tension Tension
Basal 0.25 0.25 0.22 0.34
Prismatic 0.15 0.15 0.39 0.29
Pyramidal 0.46 0.46 0.46 0.43
Twinning 0.36 0.07 0.07 0.25
Table 3.2: Average values of the maximum Schmid factors for different deformation
modes in the polycrystalline AZ31 Mg alloy.
The effective properties of a polycrystalline AZ31 Mg alloy manufactured by hot rolling
were determined through the finite element simulation of an RVE of the microstructure.
Four different RVEs were used in a hierarchical sequence in the optimization process.
They were based on a cubic RVE discretized with cubic finite elements (voxels). In three
models, each crystal in the RVE was represented by one voxel and the models differed
in the number of crystal included in the RVE, either 64, Fig. 3.4(a), 216 or 512, Fig.
3.4(b). Simplicity in the RVE generation and the possibility to include a large number
of grains in the RVE with limited computational cost are the obvious advantages of this
representation. However, it is known that the models with one voxel per crystal tends to
give a stiff response [Segurado and Llorca, 2013, Zhao et al., 2007] because the deformation
is overconstrained to maintain the compatibility between adjacent crystals. This fact is
enhanced by the poor representation of the strain fields because the linear finite elements
cannot reproduce the strain concentrations at the grain boundaries [Segurado and Llorca,
2013, Zhao et al., 2007]. The fourth RVE model included a more realistic representation
of grain shape with � 7 voxels per grain and 512 grains to overcome these limitations, Fig.
3.4(c).
In all cases, each voxel was a cubic finite element (C3D8) in Abaqus with 8 nodes at the
55

Chapter 3. Results and discussion
cube corners and full integration. The orientation of each grain in the RVEs was obtained
from the experimental orientation distribution function (which describes the initial texture)
using a Monte Carlo lottery. The maximum number of orientations in the RVEs was limited
(512) and the pole figure describing the texture of an RVE with 512 grains, depicted in
Fig. 3.1(b), presented some differences with actual pole figure but captured the strong fiber
texture which was the dominant feature. In agreement with previous results [Segurado and
Llorca, 2013], it was assumed that the mechanical behavior obtained with 512 crystals was
independent of the particular random realization obtained from the ODF.
The crystal-plasticity model introduced in section 2.2 was used as the constitutive
response of the AZ31 Mg grains. The five independent elastic constants of the HCP Mg at
300 K were used here for the AZ31 Mg alloy [Zhang and Joshi, 2012]: C1111 = 59.4 GPa,
C3333 = 61.6, C1212 = 16.4 GPa , C1122 = 25.6 GPa, C1133 = 21.4 GPa. The single crystal
parameters to be obtained by the inverse optimization procedure were the initial CRSS,
τ0,c, the saturation CRSS, τsat, and initial hardening modulus, h0, for each deformation
mode considered in the model: basal, prismatic and pyramidal hc+ai slip and extension
twinning. The parameters controlling the latent-hardening, qsl−sl and qsl−tw, were 1.0 and
2.0 respectively. These values are in agreement with those used in other investigations
[Kothari and Anand, 1998, Staroselsky, 1998, Anand, 2004, Roters et al., 2010, Fernandez
et al., 2013, Wang et al., 2010] and take into account the strong hardening induced by
twinning of the traditional slip modes. The hardening exponents asl and atw were 0.6 and
1.0 respectively, which are also typical for AZ31 Mg alloy [Fernandez et al., 2013]. The rate
sensitivity exponent, m, in equation (2.9), was 0.1. With this value of m, the mechanical
response is almost independent of the strain rate when the applied strain rates in the
simulation are of the order of γ0. Reducing more the value of m impaired the convergence
and led to very similar mechanical behavior.
The finite element simulations to compute the polycrystal behavior were carried out in
Abaqus/standard [Abaqus, 2013] within the framework of the finite deformations theory
with the initial unstressed state as reference. From the available experimental results, three
tests were chosen as inputs for the optimization procedure (tension-ND, compression-ND
and tension-RD) and the fourth one (tension in the RD-ND plane at 45◦) was used to
validate the single crystal properties obtained by optimization. The objective function O
was built from the experimental stress-strain curves in three directions which, as reported
in Table 3.2, activate different deformation mechanisms. Approximately 200 points per
56
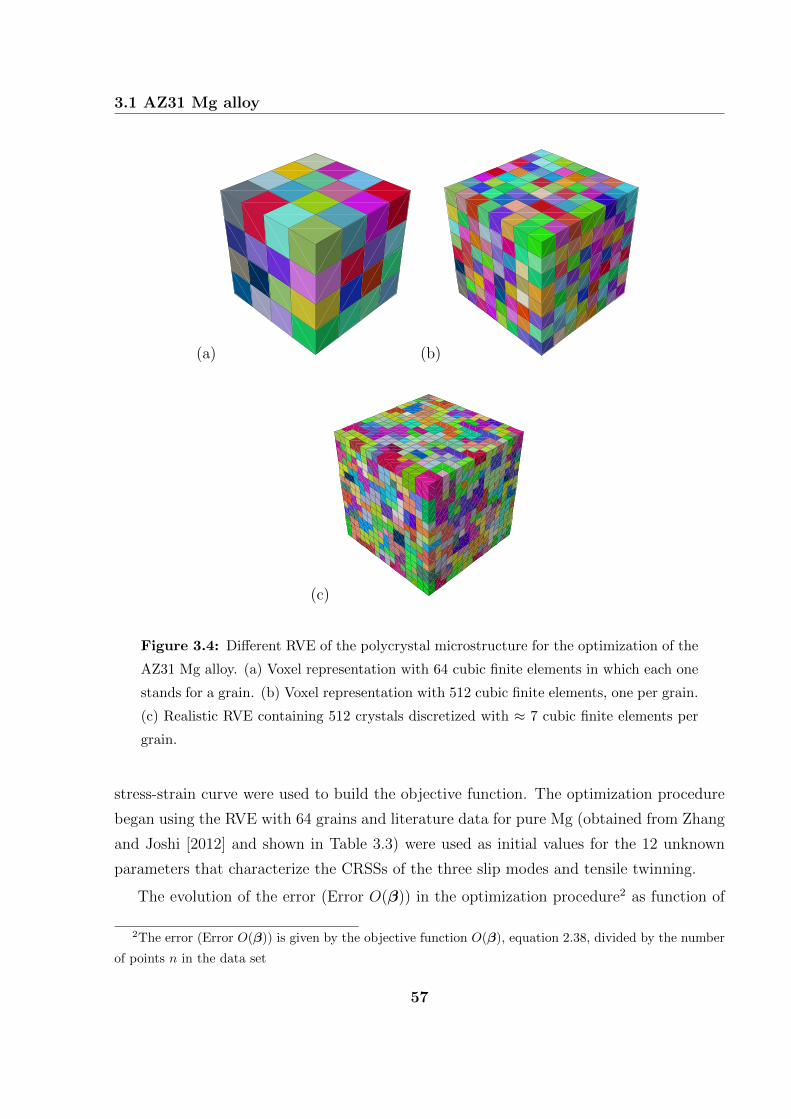
3.1 AZ31 Mg alloy
(a) (b)
(c)
Figure 3.4: Different RVE of the polycrystal microstructure for the optimization of the
AZ31 Mg alloy. (a) Voxel representation with 64 cubic finite elements in which each one
stands for a grain. (b) Voxel representation with 512 cubic finite elements, one per grain.
(c) Realistic RVE containing 512 crystals discretized with � 7 cubic finite elements per
grain.
stress-strain curve were used to build the objective function. The optimization procedure
began using the RVE with 64 grains and literature data for pure Mg (obtained from Zhang
and Joshi [2012] and shown in Table 3.3) were used as initial values for the 12 unknown
parameters that characterize the CRSSs of the three slip modes and tensile twinning.
The evolution of the error (Error O(β)) in the optimization procedure2 as function of
2The error (Error O(β)) is given by the objective function O(β), equation 2.38, divided by the number
of points n in the data set
57

Chapter 3. Results and discussion
the number of iterations is plotted in Fig. 3.5. It shows that the error decreased rapidly
with the number of iterations but reached a plateau after 10 iterations. At this point, the
dumping parameter λ (eq. 2.42) begins to grow and further iterations do not reduce the
error, indicating that the optimum has been reached for the RVE considered. Then, another
set of iterations was carried out using the parameters obtained in the last simulation with
the RVE containing 216 grains and afterwards with the RVE with 512 crystals. The
initial error at the beginning of each set of iteration with a new RVE was higher because
the parameters were optimized for the previous RVE but the differences were not large
indicating that the models with one voxel per grain provided a good approximation in this
strongly textured material. The final set of iterations was carried out with the realistic
RVE containing 512 grains and � 7 voxels per grain and the results obtained after two
iterations with this model were considered optimum.
0
10
20
30
40
50
0 5 10 15 20 25 30 35
64 grains / 1 voxel/grain216 grains / 1 voxel/grain512 grains / 1 voxel/grain584 grains / ≈7 voxels/grains
Erro
r O (M
Pa/p
oint
)
Number of iterations
Figure 3.5: Evolution of the objective error function per point as a function of the
number of optimization iterations for different RVEs.
The optimum values of the parameters to describe the mechanical behavior of each slip
mode and extension twinning are shown in Table 3.3 for the RVEs with 64 and 512 grains.
They were very different from the initial ones, corresponding to pure Mg, but the disparities
in the parameters obtained with different RVEs are limited, indicating that the influence
of the number of voxels per grain is limited in this particular case, in agreement with the
58
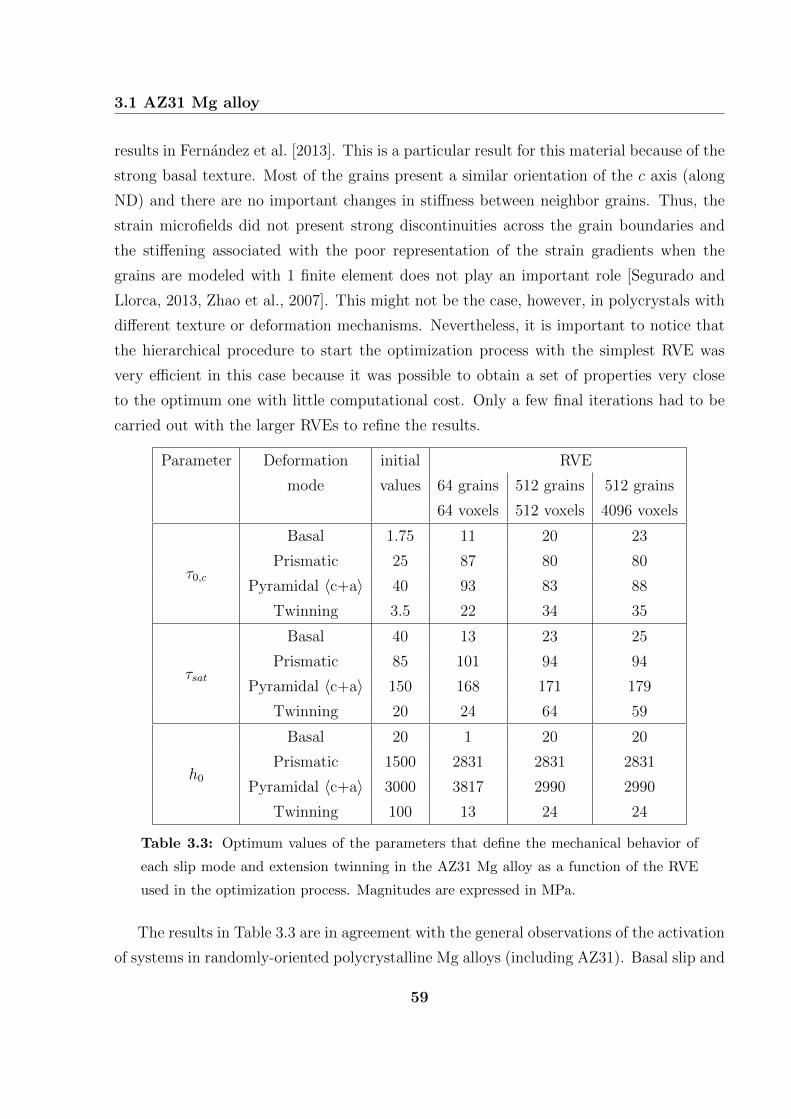
3.1 AZ31 Mg alloy
results in Fernandez et al. [2013]. This is a particular result for this material because of the
strong basal texture. Most of the grains present a similar orientation of the c axis (along
ND) and there are no important changes in stiffness between neighbor grains. Thus, the
strain microfields did not present strong discontinuities across the grain boundaries and
the stiffening associated with the poor representation of the strain gradients when the
grains are modeled with 1 finite element does not play an important role [Segurado and
Llorca, 2013, Zhao et al., 2007]. This might not be the case, however, in polycrystals with
different texture or deformation mechanisms. Nevertheless, it is important to notice that
the hierarchical procedure to start the optimization process with the simplest RVE was
very efficient in this case because it was possible to obtain a set of properties very close
to the optimum one with little computational cost. Only a few final iterations had to be
carried out with the larger RVEs to refine the results.
Parameter Deformation initial RVE
mode values 64 grains 512 grains 512 grains
64 voxels 512 voxels 4096 voxels
τ0,c
Basal 1.75 11 20 23
Prismatic 25 87 80 80
Pyramidal hc+ai 40 93 83 88
Twinning 3.5 22 34 35
τsat
Basal 40 13 23 25
Prismatic 85 101 94 94
Pyramidal hc+ai 150 168 171 179
Twinning 20 24 64 59
h0
Basal 20 1 20 20
Prismatic 1500 2831 2831 2831
Pyramidal hc+ai 3000 3817 2990 2990
Twinning 100 13 24 24
Table 3.3: Optimum values of the parameters that define the mechanical behavior of
each slip mode and extension twinning in the AZ31 Mg alloy as a function of the RVE
used in the optimization process. Magnitudes are expressed in MPa.
The results in Table 3.3 are in agreement with the general observations of the activation
of systems in randomly-oriented polycrystalline Mg alloys (including AZ31). Basal slip and
59

Chapter 3. Results and discussion
tension twinning are the softest deformation mechanisms at room temperature and quasi-
static strain rates, while pyramidal and prismatic slip were found to take place at much
higher stresses [Barnett et al., 2006, Hutchinson and Barnett, 2010].
The accuracy of the optimization process is clearly shown in Fig. 3.6(a), in which the
experimental and computed stress-strain curves are very close for the three orientations
in the whole deformation range. It is worth noting that this excellent agreement is only
possible because the physical mechanisms of plastic deformation and the most important
microstructural details are incorporated in the computational model. In order to validate
the optimization procedure, the tensile test in the RD-ND plane at 45◦ from both orien-
tations was simulated using the single crystal parameters obtained by optimization and
the RVE containing 512 grains. The numerical and experimental stress - strain curves are
plotted in Fig. 3.6(b).The agreement between both is very good and the average error per
point similar to the one obtained for the fitted results in the tensile ND tests (Fig. 3.6(a)).
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08 0.1 0.12
Compression ND Tension ND Tension RD
Stre
ss (M
Pa)
Strain
(a)
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08 0.1 0.12
Tension ND/RD 45
Stre
ss (M
Pa)
Strain
(b)
Figure 3.6: Results of the inverse optimization procedure using three stress-strain
curves (compression ND, tension ND and tension RD) as input. (a) Experimental (solid
lines) and numerical (broken lines with symbol) stress-strain curves resulting from the
optimization procedure. (b) Model prediction of the tensile test in the RD-ND plane at
45◦ from both orientations. Solid lines correspond to experimental results while broken
lines with symbols stand for the numerical simulations. The numerical results correspond
to the RVE with 512 crystals and � 7 elements per crystal.
The set of parameters obtained by the optimization procedure using three independent
stress-strain curves as input (Table 3.3) can be compared with previous data in the lit-
60

3.1 AZ31 Mg alloy
erature for rolled AZ31 Mg alloys. Our optimization strategy provided an initial CRSS
for basal slip (23 MPa) slightly lower than for extension twinning (35 MPa). Both values
are within the range of values of most of studies, that about this topic, there are in the
literature. These investigations (the majority) concluded than the CRSS for extension
twinning was approximately twice that for basal slip [Fernandez et al., 2013, Knezevic
et al., 2010, Wang et al., 2010], while others less, predicted that the CRSS for extension
twinning was significantly lower (30% to 50%) than that for basal slip [Liu et al., 2011,
Agnew et al., 2001]. Factors such as alloy composition, processing route and grain size may
account for some differences but cannot explain these large discrepancies, which should be
attributed to two factors. Firstly, the parameter identification process may not reach the
optimum solution if it is carried out manually, by a trial-and-error approach, due to the
large number of parameters and the non-linear nature of the phenomenon. Secondly, only
two experimental curves are often used to carry out the optimization [Fernandez et al.,
2013, Wang et al., 2010, Agnew et al., 2001], which correspond to tension or compression
tests along RD or ND. If only two tests are considered in the fitting procedure, it might be
possible to identify a set of parameters that provide a reasonable fit to these stress-strain
curves, but they might not be close to the optimum solution. This point will be discussed
in the following section.
In addition to the stress-strain curves, the simulations also provide information about
the activity of each deformation mode (slip and twinning) during deformation. The relative
contribution (expressed in %) of each deformation mode to the overall plastic strain is
plotted in Figs. 3.7(a), (b), (c) and (d) for the tests in tension along ND, compression
along ND, tension along RD and tension along RD-ND plane at 45◦ from both orientations
respectively. Twinning and basal slip are the dominant deformation mechanisms during
tension along ND, Fig. 3.7(a), because they present the high Schmid factors (Table 3.2)
and low CRSSs (Table 3.3). Deformation twinning is exhausted at an applied strain of
� 5%, and pyramidal and prismatic slip have to be activated to accommodate the plastic
deformation of the grains perpendicular to the c axis, because basal slip only contributes
to the plastic deformation in the basal plane. As the CRSSs of pyramidal and prismatic
slip is much higher than that of twinning (Table 3.3), the polycrystal presents a rapid
strain hardening and the overall stress-strain curve has the sigmoidal shape shown in
Fig. 3.3. On the contrary, the strong basal texture of the rolled plate limits the number
of crystals that can deform by twinning during compression along ND. Deformation is
61

Chapter 3. Results and discussion
initially accommodated by basal slip and twinning, but the latter is exhausted very quickly
(� 0.2%), leading to the activation of pyramidal and –to a minor extent– of prismatic slip,
Fig. 3.7(b). Pyramidal slip dominates over prismatic slip because of the texture (Table 3.2)
and the stress - strain curve presents a concave shape with continuous hardening which
is controlled by pyramidal slip, Fig. 3.3. With respect to the relative activities during
tension along the RD direction, 3.7(c), they are very similar to those reported during
compression along ND and the stress - strain curves are also very close. Finally, basal slip
and twinning are the dominant mechanisms during tension along RD-ND plane at 45◦ from
both orientations although twinning starts to be exhausted at � 5% strain. At this point,
pyramidal and prismatic slip have to be activated to accommodate the plastic deformation
of the grains perpendicular to the c axis, as it was the case under tension along ND. The
differences between tension along ND and tension along RD-ND plane at at 45◦ from both
orientations are the higher activity of basal in the latter (due to the higher Schmid factor,
Table 3.2) and the reduced twinning activity.
Another result that can be obtained from numerical simulation is the texture evolution
during deformation. The experimental and numerical pole figures of the AZ31 Mg alloy
after 10% tensile deformation along ND are plotted in Figs. 3.8 (a) and (b), respectively.
Both pole figures are in good agreement, showing the rotation basal planes from the ND
orientation to TD due to twinning, although the number of orientations in the RVE was
only 512.
The results presented in the previous paragraphs demonstrate that the inverse opti-
mization strategy based on the Levenberg-Marquardt method is able to provide a set of
parameters for the single crystal properties that can be used to predict the mechanical
behavior of the polycrystalline aggregate under different loading conditions in HCP poly-
crystals with very strong plastic anisotropy. Nevertheless, a direct comparison of the model
predictions for the CRSSs of the single crystals with experimental data is not available,
and there is always a doubt on whether this set of parameters is unique or there are other
sets than can lead to similar results. Very likely, there is not a rigorous answer to this
question (whether or not there is a unique solution to the non-linear optimization prob-
lem) and, in any case, is out of the scope of this thesis. Nevertheless, it is important to
explore the influence of two critical factors on the outcome of the optimization problem:
the input information (in terms of the stress-strain curves) and the starting points for the
optimization analysis (the initial set of parameters for the properties of the slip and twin
62
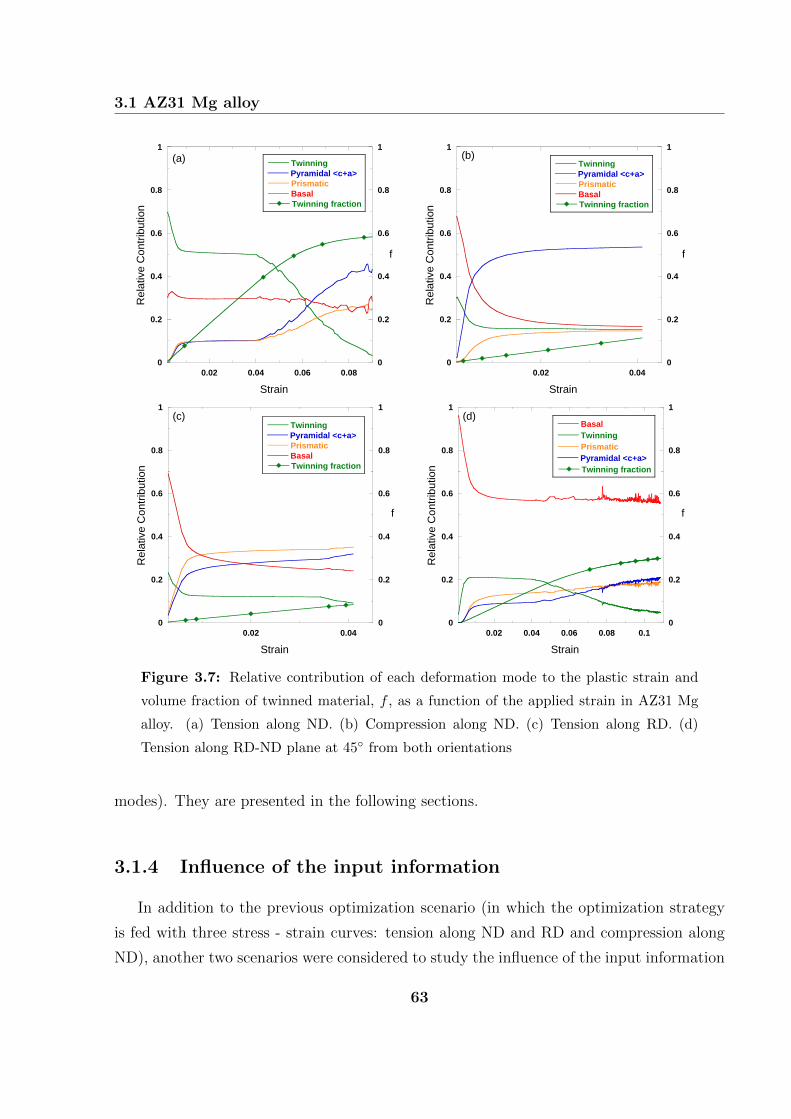
3.1 AZ31 Mg alloy
0
0.2
0.4
0.6
0.8
1
0.02 0.04 0.06 0.08
TwinningPyramidal <c+a>PrismaticBasalTwinning fraction
0
0.2
0.4
0.6
0.8
1R
elat
ive
Con
tribu
tion
Strain
f
(a)
0
0.2
0.4
0.6
0.8
1
0.02 0.04
TwinningPyramidal <c+a>PrismaticBasalTwinning fraction
0
0.2
0.4
0.6
0.8
1
Rel
ativ
e C
ontri
butio
n
Strain
(b)
f
0
0.2
0.4
0.6
0.8
1
0.02 0.04
TwinningPyramidal <c+a>PrismaticBasalTwinning fraction
0
0.2
0.4
0.6
0.8
1
Rel
ativ
e C
ontri
butio
n
Strain
(c)
f
0
0.2
0.4
0.6
0.8
1
0.02 0.04 0.06 0.08 0.1
BasalTwinningPrismaticPyramidal <c+a>Twinning fraction
0
0.2
0.4
0.6
0.8
1
Rel
ativ
e C
ontri
butio
n
Strain
(d)
f
Figure 3.7: Relative contribution of each deformation mode to the plastic strain and
volume fraction of twinned material, f , as a function of the applied strain in AZ31 Mg
alloy. (a) Tension along ND. (b) Compression along ND. (c) Tension along RD. (d)
Tension along RD-ND plane at 45◦ from both orientations
modes). They are presented in the following sections.
3.1.4 Influence of the input information
In addition to the previous optimization scenario (in which the optimization strategy
is fed with three stress - strain curves: tension along ND and RD and compression along
ND), another two scenarios were considered to study the influence of the input information
63

Chapter 3. Results and discussion
(a) (b)
Figure 3.8: Pole figures of the texture after 10% tensile strain along ND of the rolled
AZ31 Mg alloy. (a) Experimental results. (b) Computational homogenization results
obtained with the model with 512 orientations. The numbers in the legend stand for
multiples of random distribution.
on the final results. Only one stress-strain curve (tension along the ND) was used as input
in one of them, while two stress - strain curves (tension along ND and RD) were used in
the second one. The initial parameters in the optimization procedure for the slip and twin
modes were those corresponding to pure Mg in all cases (Table 3.3). The same hierarchical
optimization procedure was carried out in the both scenarios starting with the smallest
RVE which includes 64 grains and 1 voxel per grain, Fig. 3.6(a), and finishing with the
complex RVE including 512 grains and � 7 voxels per grain.
The influence of the input stress - strain curves (either one, two or three) on the set of
parameters that define the mechanical behavior of each slip mode and extension twinning
in the grains of the AZ31 Mg alloy are depicted in Table 3.4. The data for three curves are
copied from Table 3.3 to facilitate the comparison, which leads to the obvious conclusion
that the results obtained with one or two input stress-strain curves are different between
them and also differ from those obtained from three input stress-strain curves.
Whether the parameters obtained with one or two curves are worst than those obtained
with three curves or just different can be decided by comparing the predictions of the stress-
strain curves with the experimental ones. This information can be found in Figs. 3.9 and
3.10 for the optimizations carried out from one or two stress - strain curves, respectively.
The parameters obtained from the optimization procedure were able to provide a very good
64

3.1 AZ31 Mg alloy
Parameter Deformation Input curves
mode ND-T, RD-T, ND-C ND-T, RD-T ND-T
τ0,c
Basal 23 7 8
Prismatic 80 93 28
Pyramidal hc+ai 88 117 50
Twinning 35 31 35
τsat
Basal 25 8 106
Prismatic 94 104 82
Pyramidal hc+ai 179 161 211
Twinning 59 54 55
h0
Basal 20 4 35
Prismatic 2831 2824 1570
Pyramidal hc+ai 2990 4690 3428
Twinning 24 306 204
Table 3.4: Optimum values of the parameters that define the mechanical behavior of
each slip mode and extension twinning in the AZ31 Mg alloy as a function of the input
stress-strain curves used in the optimization procedure. Magnitudes are expressed in
MPa.
fit of the input stress-strain curve (tension along ND, Fig. 3.9(a)), but the predictions of
the three remaining stress-strain curves were very poor, particularly in the cases of tension
along RD and compression along ND, Fig. 3.9(b). This result is not surprising because the
mechanical response of the input stress-strain curve was dominated by twinning and basal
slip, Fig. 3.7(a), and it was not possible to obtain information about the CRSSs in the
pyramidal and prismatic modes. So, the CRSSs for pyramidal and prismatic slip provided
by the optimization strategy were not accurate but these plastic deformation mechanisms
are very important during tension along RD and compression along RD. Twinning was
inhibited in these cases due to the strong basal texture and the crystal deformation per-
pendicular to the basal plane has to be accommodated by either pyramidal or prismatic
slip, Figs. 3.7(b) and (c).
The predictions with the parameters obtained from the optimization strategy improved
dramatically if two stress-strain curves (tension along RD and ND) were used as input,
Fig. 3.10. Twinning and basal slip were the dominant deformation mechanisms during
65

Chapter 3. Results and discussion
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08 0.1 0.12
Tension ND
Stre
ss (M
Pa)
Strain
(a)
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08 0.1 0.12
Tension RD
Compression ND
Tension ND/RD 45
Stre
ss (M
Pa)
Strain
(b)
Figure 3.9: Results of the inverse optimization procedure using one stress-strain curves
(tension ND) as input. (a) Experimental (solid lines) and numerical (broken lines with
symbol) stress-strain curves resulting from the optimization procedure. (b) Model pre-
dictions of the compression test along ND and of the tensile test along RD and in the
RD-ND plane at 45◦ from both orientations. Solid lines correspond to experimental re-
sults while broken lines with symbols stand for the numerical simulations. The numerical
results correspond to the RVE with 512 crystals and � 7 elements per crystal.
tension along ND, while basal, pyramidal and prismatic controlled the deformation during
tension along RD, Fig. 3.7. Thus, the optimization procedure was able to obtain reliable
information about the CRSSs in the four modes and the values of the initial, τ0,c, and
saturation, τsat, CRSSs for twinning, pyramidal and prismatic slip obtained with two or
three input stress-strain curves were very similar and significant differences were only
found in the CRSSs for basal slip. The predictions of the mechanical response during
compression along ND were very good and those for tension in the RD-ND plane at 45◦
from both orientations, Fig. 3.10(b), were slightly worst than those obtained from the
parameters determined from 3 input stress-strain curves. Quantitatively, the magnitude of
the objective error function, eq. 2.38, considering all the predicted curves for each of the
cases, decreased from 31 to 25 and 11 MPa/point for the cases with one, two and three
input stress-strain curves, respectively.
These results show the critical role played by the input information to achieve accurate
results during the inverse optimization process. If the input stress-strain curve is domi-
66

3.1 AZ31 Mg alloy
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08 0.1 0.12
Tension RDTension ND
Stre
ss (M
Pa)
Strain
(a)
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08 0.1 0.12
Compression ND
Tension ND/RD 45
Stre
ss (M
Pa)
Strain
(b)
Figure 3.10: Results of the inverse optimization procedure using two stress-strain curves
(tension along ND and RD) as input. (a) Experimental (solid lines) and numerical
(broken lines with symbol) stress-strain curves resulting from the optimization procedure.
(b) Model predictions of the compression test along ND and of the tensile test in the RD-
ND plane at 45◦ from both orientations. Solid lines correspond to experimental results
while broken lines with symbols stand for the numerical simulations. The numerical
results correspond to the RVE with 512 crystals and � 7 elements per crystal.
nated by basal slip and twinning, the parameters obtained from the inverse optimization
strategy will never be able to predict the mechanical behavior in orientations dominated by
either prismatic or pyramidal slip. Nevertheless, two input stress-strain curves can provide
parameters very similar to those obtained with three input stress-strain curves if they are
properly chosen, i.e. one curve is controlled by basal and prismatic slip while prismatic
and pyramidal slip are dominant in the second one. It should be noticed that the input
information in the optimization process is not limited to stress-strain curves. Other data,
such as the texture evolution or the volume fraction of twinned material as a function of
the applied strain, can be included in the error function and can enhance the accuracy of
the results obtained by the inverse optimization strategy.
3.1.5 Influence of the initial set of parameters
All the inverse optimization analyses presented above for rolled AZ31 Mg alloy started
from the CRSSs of pure Mg crystals for basal, prismatic, pyramidal slip and extension
67

Chapter 3. Results and discussion
twinning. While this choice seems reasonable, it is important to analyze its influence
on the final results because the robustness of the optimization strategy will be seriously
compromised if the final result was strongly dependent on the starting values. To this
end, an optimization exercise was carried out with the simplest RVE which only included
64 grains and 1 voxel per grain. Three stress-strain curves were used as input (tension
along ND and RD and compression along ND) and three different set of parameters were
chosen as starting points for the optimization: one corresponding to pure Mg (Table 3.3),
another corresponding to the properties of Mg increased by a factor of 2 and a third one
in which the initial CRSS (τ0,c = 40 MPa), the saturation CRSS (τsat = 100 MPa) and the
hardening modulus (h0 = 1500 MPa) were the same for basal, prismatic and pyramidal
slip as well as twinning. The second set of parameters was chosen to increase the plastic
anisotropy of Mg while the third one was characteristic of an isotropic material.
The optimized values of the initial CRSS, τ0,c, the saturation CRSS, τsat, and the initial
hardening modulus, h0, for each deformation mode obtained from the optimization process
for the three different sets of initial parameters are plotted in Figs. 3.11(a), (b) and (c),
respectively. Despite of the initial values for the singe crystal properties, the optimization
algorithm provided similar results for the initial CRSS, τ0,c, the saturation CRSS, τsat, and
the initial hardening modulus, h0. There are only two results that are significantly different:
the saturation CRSS for twinning when the input properties are those of Mg increased by a
factor to two and the initial hardening modulus, h0 when the input properties are those of
an isotropic material. However, these differences are only apparent and do not influence the
actual response of the crystal. In the former, the initial hardening modulus is extremely
low and thus the high value of the CRSS at saturation is never reached. In the latter,
the differences between the initial and saturation CRSSs are very small and the initial
hardening modulus does not play any role.
3.2 Mg alloys containing rare earths
It has recently been shown that alloying with certain rare-earth (RE) elements might
lead to a complete elimination of the yield anisotropy at ambient temperature in wrought
Mg alloys [Ball and Prangnell, 1994, Mackenzie et al., 2007, Stanford and Barnett, 2008,
Robson et al., 2011, Hidalgo-Manrique et al., 2013]. It has been reported that RE addi-
tions influence dynamic recrystallization during processing and lead to weak deformation
68
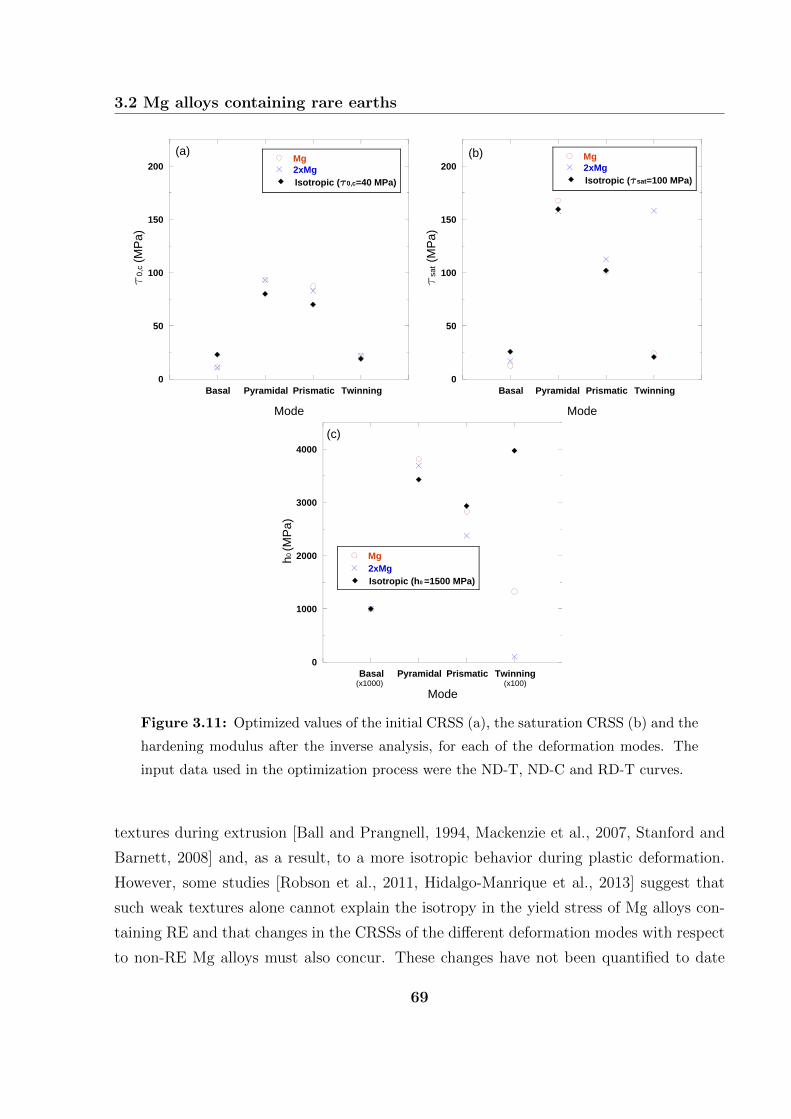
3.2 Mg alloys containing rare earths
0
50
100
150
200
Basal Pyramidal Prismatic Twinning
Mg2xMgIsotropic (t0,c=40 MPa)
t0,
c (M
Pa)
Mode
(a)
0
50
100
150
200
Basal Pyramidal Prismatic Twinning
Mg2xMgIsotropic (tsat=100 MPa)
tsa
t (M
Pa)
Mode
(b)
0
1000
2000
3000
4000
Basal Pyramidal Prismatic Twinning
Mg2xMgIsotropic (h0 =1500 MPa)
h0 (M
Pa)
Mode
(c)
(x1000) (x100)
Figure 3.11: Optimized values of the initial CRSS (a), the saturation CRSS (b) and the
hardening modulus after the inverse analysis, for each of the deformation modes. The
input data used in the optimization process were the ND-T, ND-C and RD-T curves.
textures during extrusion [Ball and Prangnell, 1994, Mackenzie et al., 2007, Stanford and
Barnett, 2008] and, as a result, to a more isotropic behavior during plastic deformation.
However, some studies [Robson et al., 2011, Hidalgo-Manrique et al., 2013] suggest that
such weak textures alone cannot explain the isotropy in the yield stress of Mg alloys con-
taining RE and that changes in the CRSSs of the different deformation modes with respect
to non-RE Mg alloys must also concur. These changes have not been quantified to date
69
Chapter 3. Results and discussion
and the origin of the influence of the RE elements on the CRSS values for Mg alloys is
currently not fully understood.
The inverse optimization methodology developed in this thesis is an ideal tool to check
this hypothesis and it was applied to determine the single crystal properties at ambient
temperature of two polycrystalline Mg alloys containing 0.5 and 1.0 wt. % Nd from the ex-
perimental stress-strain curves of uniaxial tests along different orientations with respect to
the extrusion direction (ED). The effect of Nd on the CRSSs can be quantified by compar-
ing the values obtained for these alloys with those corresponding to pure Mg [Herrera-Solaz
et al., 2014a].
3.2.1 Materials and processing
Two Mg alloys, denominated MN10 and MN11, were manufactured for this investigation
at the Magnesium Innovation Centre, Helmholtz-Zentrum Geesthacht (Germany). Their
chemical composition is summarized in Table 3.5.
Alloy Mn Nd Fe Si
MN10 1 0.5 0.15 max 0.015 max
MN11 1 1.0 0.15 max 0.015 max
Al Cu Ni Ca Mg
MN10 0.001 max 0.001 max 0.0001 max 0.02 max remaining
MN11 0.001 max 0.001 max 0.0001 max 0.02 max remaining
Table 3.5: Chemical composition of MN10 and MN11 Mg alloys (in wt.%).
The MN10 and MN11 alloys were gravity cast to produce billets for extrusion with a
diameter of 93 mm. The billets were homogenized at 350◦C during 15 h before processing.
Then, indirect extrusion of MN10 and MN11 billets was carried out at 360◦C and 350◦C,
respectively, at 2.8 mm/s, to produce round bars of 17 mm in diameter (extrusion ratio
equal to 1:30), which were subsequently air-cooled.
The as-extruded MN10 and MN11 round bars were fully recrystallized and their mi-
crostructure was formed by equiaxed grains with average diameters of 21 µm and 17 µm,
respectively. The initial texture of both alloys, measured at the center of the bars, is shown
in Fig. 3.12 by means of inverse pole figures. Both textures are weaker than those typical
of extruded non-RE containing Mg alloys [Dillamore and Roberts, 1965]. The weak texture
70

3.2 Mg alloys containing rare earths
is especially pronounced in the MN11 bar while a slight tendency for the ED to be aligned
in the h1010i direction is still observed in the MN10 bar. The origin of this weak texture is
still under debate. It has been proposed that, there is a larger tendency for recrystallized
grains to nucleate at shear bands in RE-containing alloys and that the orientations of such
nuclei become more widely spread as the Nd content increases [Hidalgo-Manrique et al.,
2013]. It has also been suggested that the presence of RE solutes and intermetallic parti-
cles hinder the grain boundary mobility, thereby delaying the preferred growth of certain
orientations [Hidalgo-Manrique et al., 2013] and leading to finer grains with respect to
non-RE containing Mg alloys.
Figure 1
Figure 3.12: Microstructure in the as-extruded condition (as shown in an optical mi-
crograph) and inverse pole figure showing the orientation of the extrusion direction. (a)
MN10 Mg alloy. (b) MN11 Mg alloy
3.2.2 Mechanical behavior
Uniaxial tension and compression tests were performed in the as-extruded bars at ambi-
ent temperature and at an initial strain rate of 10−3s−1 using an Instron universal mechan-
ical testing machine. The tensile specimens has a dog-bone shape with gauge dimensions
of 4 mm in diameter and 12 mm in length and were oriented parallel to the ED. The
compressive specimens were cylinders with 3 mm in diameter and 4.5 mm in length and
71

Chapter 3. Results and discussion
were machined with the loading axis in three different orientations: parallel to the ED,
inclined 45◦ with respect to the ED and perpendicular to the ED.
The four experimental stress-strain curves (tension along ED, compression along ED,
compression at 45◦ from ED and compression at 90◦ from ED) are plotted in Figs. 3.13(a)
and (b) for the MN10 and MN11 Mg alloys, respectively. Although the mechanical tests
were carried out up to very large strains (up to 20%), only the initial part of the stress-strain
curves (up to 7%) was used in the inverse optimization strategy and is plotted in Fig. 3.13.
The MN10 alloy (Fig. 3.13(a)) exhibited a yield stress asymmetry, albeit less pronounced
that that reported for non-RE Mg alloys [Yi et al., 2006]. In particular, the yield stress
in tension along the ED was 1.4 times higher than the compressive yield stress, reflecting
the combined effect of twinning polarity and texture, which results in a higher activity of
prismatic slip in tension and of tensile twinning in compression. The mechanical anisotropy
of the MN10 alloy is also evident by the different shapes of the tension and compression
stress-strain curves, the former being concave-up and the latter concave-down. On the
contrary, the MN11 alloy exhibited a very isotropic mechanical behavior (Fig. 3.13(b)).
The yield stress was very similar for all the tests and the shape of the curves is always
concave-up.
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08
Compression 45ºEDTension EDCompression EDCompression 90ºED
Stre
ss (M
Pa)
Strain
(a) MN10
0
50
100
150
200
250
300
0 0.02 0.04 0.06 0.08
Compression 45ºEDTension EDCompression EDCompression 90ºED
Stre
ss (M
Pa)
Strain
(b) MN11
Figure 3.13: Experimental true stress-strain curves of the RE-containing Mg alloys at
ambient temperature. (a) MN10. (b) MN11.
The experimental stress-strain curves, corresponding to compression tests parallel and
perpendicular to the ED and to tension tests parallel to the ED were used as input data
72

3.2 Mg alloys containing rare earths
in the optimization procedure.
3.2.3 Optimization strategy and results
The inverse optimization strategy was applied to MN10 and MN11 Mg alloys to as-
certain the influence of the Nd content on the CRSS of the different deformation modes,
namely basal, prismatic and pyramidal hc + ai slip and tensile twinning. The optimiza-
tion procedure followed a hierarchical sequence with cubic RVEs of different complexity
discretized with cubic finite elements (voxels). In the initial RVEs, each grain was rep-
resented by one voxel and the models included 125, 512 and 1000 grains per RVE. The
final optimization was carried out with an RVE created with the microstructure genera-
tor Dream3D [Jackson and Groeber, 2012] which included 300 grains and each grain was
modeled with approximately 200 voxels, Fig. 3.14. The grain shape was equiaxed, in
agreement with the experimental information, and the grain size followed a lognormal dis-
tribution characterized by µ = 1 and σ = 0.1. The orientation of each grain in the RVEs
was obtained from the experimental orientation distribution function (which describes the
initial texture) using a Monte Carlo lottery.
Figure 3.14: Cubic RVE of the microstructure including 300 crystals discretized with
200 cubic finite elements per grain
The effective behavior of MN10 and MN11 Mg alloys was determined through the CPFE
simulation of an RVE of the polycrystalline microstructure. The crystal-plasticity model
introduced in section 2 was used as the constitutive response of the MN10 and MN11
73

Chapter 3. Results and discussion
grains. The model accounted for the dominant deformation modes in these Mg alloys:
basal, prismatic and pyramidal hc+ai slip as well as tensile twinning. It was assumed that
the alloying elements did not modify the elastic properties and the five independent elastic
constants of the HCP Mg at 300 K were used to describe the elastic behavior[Zhang and
Joshi, 2012].
The single crystal parameters to be obtained by the inverse optimization procedure were
the initial CRSS, τ0,c, the saturation CRSS, τsat, and initial hardening modulus, h0, for
each deformation mode considered in the model: basal, prismatic and pyramidal hc + aislip and extension twinning. The initial values of these parameters in the optimization
strategy were those measured for pure Mg single crystals, that can be found in Table
3.3. The parameters controlling the latent-hardening, qsl−sl and qsl−tw, were 1.0 and 2.0
respectively, as in the case of AZ31 Mg alloy. The hardening exponents asl and atw were
0.6 and 1.0 respectively, which are also typical for AZ31 Mg alloy [Fernandez et al., 2013].
The rate sensitivity exponent, m, in equation (2.9), was 0.1. With this value of m, the
mechanical response is independent of the strain rate when the applied strain rates in the
simulation are of the order of γ0.
The finite element simulations to compute the polycrystal behavior were carried out in
Abaqus/standard [Abaqus, 2013] within the framework of the finite deformations theory
with the initial unstressed state as reference. From the available experimental results, three
mechanical tests up to an applied strain of 7% were chosen as input for the optimization
procedure (tension along ED, compression along ED and compression at 90◦ from ED)
and the fourth one (compression at 45◦ from ED) was used to validate the single crystal
properties obtained by optimization.
The input experimental stress-strain curves for the three loading cases, together with
the computed curves at the end of the optimization procedure, are plotted in Figs. 3.15(a)
and (b) for the MN10 and MN11 Mg alloys. The agreement between experimental and
numerical results is remarkable, being the average error (value of objective function divided
by the number points) always smaller than 7 MPa per point. This relatively small difference
demonstrates the ability of computational homogenization in combination with the inverse
optimization strategy to capture the mechanical response of Mg alloys. As it was previously
done for AZ31 Mg alloy and to provide further support for this statement, the fitted model
was used to predict an independent compression test performed at 45◦ from ED in both
alloys, Fig. 3.15(c). Again, the agreement between experimental and numerical results is
74

3.2 Mg alloys containing rare earths
good (average error below 10 MPa per point), validating the optimization procedure and
the set of parameters obtained.
0
50
100
150
200
250
0 0.02 0.04 0.06 0.08
Compression 90º EDTension ED
Compression ED
Stre
ss (M
Pa)
Strain
(a) MN10
0
50
100
150
200
250
0 0.02 0.04 0.06 0.08
Compression 90ºED
Tension EDCompression ED
Stre
ss (M
Pa)
Strain
(b) MN11
0
50
100
150
200
250
0 0.02 0.04 0.06 0.08
MN10
MN11
Stre
ss (M
Pa)
Strain
(c)
Figure 3.15: Experimental (solid lines) and simulated (broken lines) stress-strain curves
resulting from the optimization procedure in tension along ED, compression along ED and
compression at 90◦ from ED. (a) MN10 Mg alloy. (b) MN11 Mg alloy. (c) Experimental
(solid lines) and predicted (broken lines) stress-strain curves corresponding to both alloys
tested in compression at 45◦ with respect to ED
The optimized values of the initial CRSSs, τ0,c, for the different deformation modes for
both alloys are shown in Table 3.6 and compared with those reported for pure Mg from
single crystal experiments [Zhang and Joshi, 2012]. It can be observed that Nd additions
75

Chapter 3. Results and discussion
CRSSs(τ0,c)(MPa) Pure Mg MN10 MN11
Basal 1.75 12 40
Tensile Twinning 3.5 24 42
Prismatic 25 65 46
Pyramidal hc+ ai 40 75 50
CRSSbasal/CRSStwinning 0.5 0.5 0.95
CRSSprism/CRSStwinning 7.1 2.7 1.1
CRSSpyr/CRSStwinning 11.4 3.1 1.2
Table 3.6: Comparison of the initial CRSSs (τ0,c) obtained by inverse optimization for
the MN10 and MN11 alloys with those measured in pure Mg single crystals [Zhang and
Joshi, 2012]
lead to an increase of the initial CRSS of all deformation modes with respect to those of
pure Mg. However, the increase in the CRSS was more pronounced for extension twinning
and basal slip. Furthermore, the CRSSbasal/CRSStwinning ratio increases notably in the RE-
containing alloys while the CRSSprism/CRSStwinning and the CRSSpyr/CRSStwinning ratios
decrease steeply. These changes are more pronounced in the MN11 alloy, in which similar
values of the initial CRSS were obtained for all active slip and twinning modes. This
is consistent with the remarkable isotropy in the mechanical behavior of this alloy. The
observed variations in the initial CRSS lead to different activities of the slip and twinning
modes, as compared with pure Mg. Firstly, the increase of the CRSSbasal/CRSStwinning
ratio is consistent with an enhancement of twinning at the expense of basal slip, which
would give rise to the concave-up shape of all the MN11 stress-strain curves, including that
corresponding to the tensile test. Promotion of twinning in the RE-containing Mg alloys
at the expense of basal slip was postulated by Hidalgo-Manrique et al. [Hidalgo-Manrique
et al., 2013] based on observations of the concave-up shape of the ambient temperature
tensile stress-strain curves of a similar MN11 alloy and it was attributed to an increase
in the CRSSbasal/CRSStwinning ratio due to the presence of intermetallic prismatic plates,
very effective for hindering basal slip [Nie, 2003]. The present numerical results confirm
the hypothesis that the CRSSbasal/CRSStwinnig increases [Hidalgo-Manrique et al., 2013]
and, furthermore, suggest that an addition of 1 wt% of Nd brings the mentioned ratio
to a value close to 1. However, since the present alloys have not been age hardened, it
is unlikely that the contribution of the precipitates in inhibiting basal slip is very high
76

3.2 Mg alloys containing rare earths
and the contribution of solute atoms, which are also very effective for hardening basal slip
[Akhtar and Teghtsoonian, 1969], should be much higher.
Secondly, the reduction in the differences of the CRSS between non-basal modes and
basal slip and twinning leads to a higher activity of the former. The promotion of non-
basal slip has been largely reported for RE-containing alloys [Agnew et al., 2001, Chino
et al., 2008, Sandlobes et al., 2011, Stanford and Barnett, 2013]. However, the actual
origin of this behavior is still unclear. In HCP metals, the c/a ratio affects the difference
in the CRSS between basal and non-basal slip modes. According to some works [Agnew
et al., 2001], RE additions decrease the c/a ratio of Mg and stimulate the activation of
non-basal slip modes. It has been also put forward that RE elements influence the Peierls
potentials and the stacking fault energy on basal and non-basal planes and therefore lead
to a change in the relative CRSSs, resulting in the easier activation of non-basal slip [Chino
et al., 2008, Sandlobes et al., 2011]. The grain refinement attained in RE-containing alloys
may also lead to a higher activity of non-basal slip and not only because the differences
in CRSS between basal and non-basal slip decreases with decreasing grain size [Stanford
and Barnett, 2013], but also because the non-basal slip modes are active near the grain
boundaries, which are regions of stress concentration [Koike et al., 2003].
The experimental and simulated inverse pole figures of the compression direction after
compression along ED are shown in Fig. 3.16 for MN10 and M11 Mg alloys. Both ex-
perimental and predicted textures are very similar, evidencing further the validity of the
optimization strategy and the calculated values of CRSSs. The compression direction tends
to align mostly with the c axis in both alloys after deformation, and, less notably, with
a pyramidal direction along the h0001i-h1120i symmetry boundary of the stereographic
triangle. This is consistent with a large activity of twinning in both bars, especially in the
weakly textured MN11 alloy, which leads to an 86◦ reorientation of those grains with the
c axis inclined less than 45◦ towards the compression direction. Afterwards, grains with
basal orientations undergo a rotation towards the h1120i pole owing to pyramidal slip.
In summary, the inverse optimization strategy developed in section 2.4 of chapter 2
allowed to obtain the values of the initial CRSSs for MN10 and MN11 Mg alloys from
macroscopic testing results. The initial CRSSs were observed to change drastically with
increasing RE content. In particular, the CRSSs of basal and twinning modes as well
as the CRSSbasal/CRSStwinning ratio increased, while the CRSSprism/CRSStwinning and
CRSSpyr/CRSStwinning ratios decreased to an extent that all values become similar for
77

Chapter 3. Results and discussion
Figure 3
Figure 3.16: Experimental and simulated inverse pole figures showing the orientation
of the compression direction of the MN10 and MN11 Mg alloys after compression along
ED. The numbers in the legend stand for multiples of random distribution
Nd additions of 1 wt%. This is consistent with the isotropic yielding behavior observed
in the MN11 alloy. These changes in CRSSs with RE addition lead to the promotion of
twinning at the expense of basal slip and to an enhanced activity of non-basal modes.
3.3 MN11 Mg alloy at different temperatures
The results presented in the previous section have shown that the inverse optimization
strategy can be very useful to assess the influence of RE on the mechanical response
of Mg alloys at ambient temperature. Understanding the deformation mechanisms of
these materials at moderate temperatures (150◦C to 350◦) is critical, as most deformation
processing operations take place in this temperature range, but the information on the
influence of temperature on the mechanical behavior of RE-containing Mg alloys is limited
[Zhu and Nie, 2004, Bettles et al., 2009, Stanford et al., 2010, Hou et al., 2009, Azzeddine
and Bradai, 2013, Dudamell et al., 2013, Boehlert et al., 2013, Hou et al., 2012]. A key
aspect that requires clarification is the observation of an unexpected yield stress asymmetry
at high temperature, where the compressive yield stress is higher than the tensile yield
stress [Bettles et al., 2009, Hou et al., 2009]. Despite its relevance, this phenomenon has
not been extensively explored and its origin is still not understood. Thus, additional efforts
78

3.3 MN11 Mg alloy at different temperatures
to fully understand the high temperature mechanical behavior of RE-containing Mg alloys
are very timely.
3.3.1 Material and processing
A MN11 Mg alloy processed at the Magnesium Innovation Centre, Helmholtz-Zentrum
Geesthacht (Germany) was used to ascertain the influence of the temperature on the me-
chanical properties. The chemical composition (see Table 3.5) and the manufacturing
process are equivalent to those described in the previous section. Billets for extrusion
produced by gravity casting were machined up to a diameter of 9 mm and homogenized
at 350◦C during 15 h before extrusion. Indirect extrusion was carried out at 275◦C at 8.8
mm/s to produce round bars of 17 mm in diameter, which corresponds to an extrusion
ratio of 1:30, which were air cooled.
A detailed microstructural characterization of the material by means of optical, scan-
ning and transmission electron microscopy was carried out in samples from the as-extruded
bar as well as from the grips of the specimens tested at different temperatures. The grain
structure perpendicular to the ED is shown in Fig. 3.17. The average grain size, measured
by the linear intercept method, has been added in an inset to each micrograph. Previous
examinations along planes parallel to ED [Hidalgo-Manrique et al., 2013] revealed that the
grains in the as-extruded bar were truly equiaxed, as befits a fully recrystallized microstruc-
ture. The average grain size remained invariant even after the material was subjected to
temperatures as high as 300◦C (Figs. 3.17(b-f)) for more than 30 minutes (i.e., the tem-
perature stabilization time plus the testing time). This indicates that the grain size of
the MN11 extrusion is thermally stable, which can be at least partially attributed to the
presence of fine and thermally stable Mn-containing particles, capable of exerting a strong
pinning force on the grain boundaries [Hidalgo-Manrique et al., 2013, 2014].
The optical micrographs of Fig. 3.17 also reveal that all the samples contain a few
coarse particles preferentially located at the grain boundaries, particularly at the highest
temperatures (see red arrows in Fig. 3.17(f)). This is consistent with the large tendency of
RE elements to segregate to the grain boundaries as a result of the radius mismatch between
RE and Mg atoms [Stanford et al., 2011]. Segregation of Nd to the grain boundaries has
been proposed to contribute to the restriction of grain growth at high temperature [Hidalgo-
Manrique et al., 2014]. Furthermore, the remarkable grey shading of the grain interiors of
79
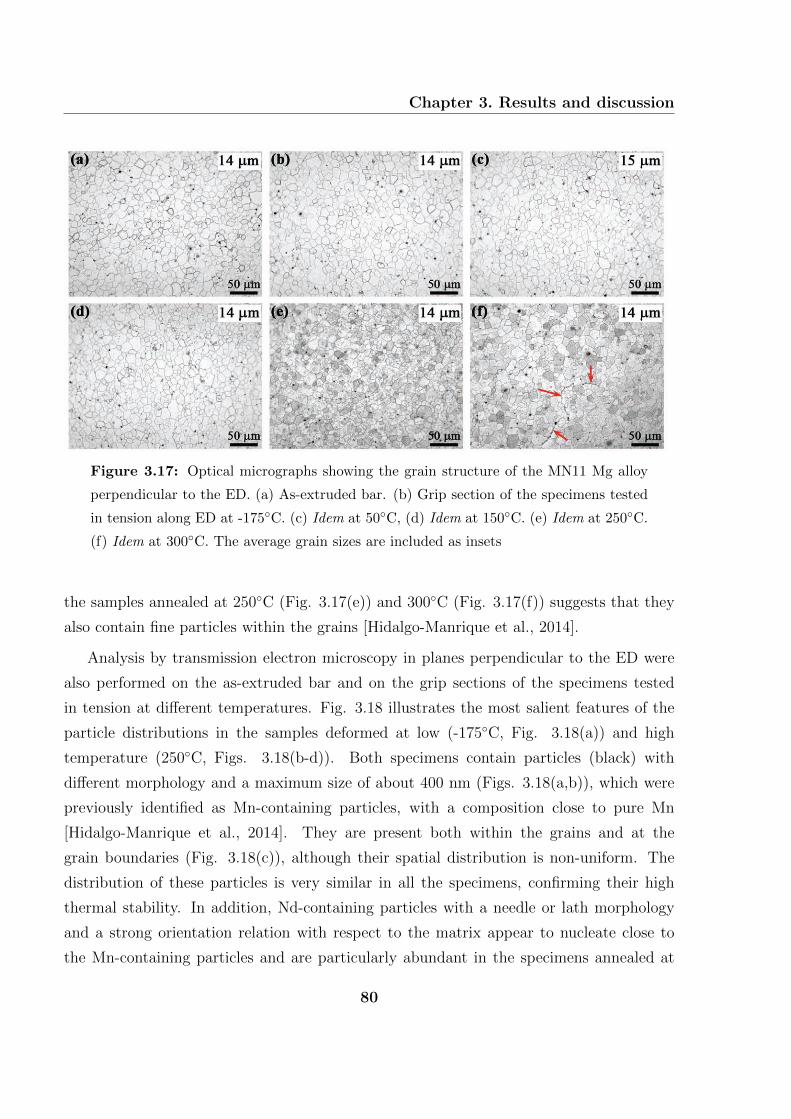
Chapter 3. Results and discussion
Figure 1
Figure 2
1
Figure 3.17: Optical micrographs showing the grain structure of the MN11 Mg alloy
perpendicular to the ED. (a) As-extruded bar. (b) Grip section of the specimens tested
in tension along ED at -175◦C. (c) Idem at 50◦C, (d) Idem at 150◦C. (e) Idem at 250◦C.
(f) Idem at 300◦C. The average grain sizes are included as insets
the samples annealed at 250◦C (Fig. 3.17(e)) and 300◦C (Fig. 3.17(f)) suggests that they
also contain fine particles within the grains [Hidalgo-Manrique et al., 2014].
Analysis by transmission electron microscopy in planes perpendicular to the ED were
also performed on the as-extruded bar and on the grip sections of the specimens tested
in tension at different temperatures. Fig. 3.18 illustrates the most salient features of the
particle distributions in the samples deformed at low (-175◦C, Fig. 3.18(a)) and high
temperature (250◦C, Figs. 3.18(b-d)). Both specimens contain particles (black) with
different morphology and a maximum size of about 400 nm (Figs. 3.18(a,b)), which were
previously identified as Mn-containing particles, with a composition close to pure Mn
[Hidalgo-Manrique et al., 2014]. They are present both within the grains and at the
grain boundaries (Fig. 3.18(c)), although their spatial distribution is non-uniform. The
distribution of these particles is very similar in all the specimens, confirming their high
thermal stability. In addition, Nd-containing particles with a needle or lath morphology
and a strong orientation relation with respect to the matrix appear to nucleate close to
the Mn-containing particles and are particularly abundant in the specimens annealed at
80

3.3 MN11 Mg alloy at different temperatures
250◦C (Figs. 3.18(b,d)) and 300◦C. This is consistent with the distinct grey shading that
can be observed in the corresponding optical micrographs (Figs. 3.17(e-f)). Such needles
or laths, shown in greater detail in Fig. 3.18(d), have been previously identified as Mg3Nd
phases [Hidalgo-Manrique et al., 2014], and are actually prismatic plates, the most effective
geometric obstacle for basal slip [Nie, 2003]. Finally, grain boundary precipitation of several
Nd-containing phases is also patent. Large (> 1µm) and irregularly-shaped Nd-containing
particles occasionally decorate the boundaries in all the specimens. More details about the
microstructure can be found in [Hidalgo-Manrique et al., 2015]
Figure 1
Figure 2
1
Figure 3.18: Transmission electron microscopy micrographs of the grip section of the
specimens tested in tension at 10−3s−1 and different temperatures. (a) -175◦C and (b-d)
250◦C. Micrographs are perpendicular to the ED.
The inverse pole figures in the ED of the as-extruded bar and the grip sections of the
specimens tested in tension are shown in Fig. 3.19. The as-extruded bar (Fig. 3.19(a))
exhibits a very broad angular distribution of the ED and thus displays a very weak texture
whose maximum intensity is only 2 times multiples of random distribution. Figs. 3.19(b-f)
81

Chapter 3. Results and discussion
also reveals that neither the immersion in nitrogen (Fig. 3.19(b)) nor the heating up to
300◦C (Figs. 3.19(c-f)) have a noticeable effect on the texture of the as-extruded bar. This
is consistent with the invariability of the average grain size at the testing temperatures
(Fig. 3.17).
Figure 3
Figure 4
2
Figure 3.19: Inverse pole figures illustrating the orientation of the ED. (a) As-extruded
bar. (b) Grip section of the specimens tested in tension along ED at -175◦C. (c) Idem at
50◦C. (d) Idem at 150◦C. (e) Idem at -250◦C. (f) Idem at -300◦C. The numbers in the
legend stand for multiples of random distribution.
3.3.2 Mechanical behavior
Specimens for mechanical tests in tension and compression were machined from the
as-extruded bar with their loading axis parallel to the ED. The tensile specimens had a
cylindrical geometry with a gauge section of 3 mm in diameter and 10 mm in length. The
compressive specimens were also cylindrical with 3 mm in diameter and 4.5 mm in length.
Mechanical tests at an initial strain rate of 10−3s−1 were carried until failure in a Servosis
universal testing machine at -175◦C, 50◦C, 150◦C, 250◦C and 300◦C. Prior to testing,
the specimens were kept for � 20 minutes at the test temperature, which was measured
using a thermocouple clamped to the sample. The compression tests were performed
using lubrication in order to minimize friction between the sample and the anvils. For
the tests at -175◦C, the samples were tested in a liquid nitrogen bath. Otherwise, they
were tested in air within an elliptical furnace and heating was provided by four quartz
lamps. At the end of the tests, the specimens were immediately water-cooled to preserve
82

3.3 MN11 Mg alloy at different temperatures
the microstructure. Additionally, several specimens were deformed in compression at 50◦C
and 250◦C at an initial strain rate of 10−3s−1 up to intermediate strains to study the
evolution of microstructure and texture with deformation.
The true stress-true strain curves corresponding to the MN11 alloy in compression and
tension along the ED are depicted in Figs. 3.20(a) and (b), respectively, as a function of
temperature. Since the alloy exhibits very weak texture, basal slip should be the dominant
deformation mechanism irrespective of the deformation mode. Therefore, concave-down
shaped curves were expected in both tension and compression. However, the shape of the
curves is concave-up in both cases up to 150◦C. Moreover, large twinning activity was found
during the first stages of deformation in compression as compared with standard Mg alloys.
This was due to the reduction in the CRSStwinning/CRSSbasal ratio with respect to that of
pure Mg [Zhang and Joshi, 2012], in agreement with the results in the previous section.
The curves are noted to have a concave-down shape above 150◦C, which is consistent with
a decline of the twinning activity.
0
50
100
150
200
250
300
350
400
0 0.1 0.2 0.3 0.4
Compression ED -175ºCCompression ED 50ºC
Compression ED 300ºCCompression ED 250ºCCompression ED 150ºC
Stre
ss (M
Pa)
Strain
(a)
0
50
100
150
200
250
300
350
400
0 0.1 0.2 0.3 0.4
Tension ED -175ºCTension ED 50ºC
Tension ED 300ºCTension ED 250ºCTension ED 150ºC
Stre
ss (M
Pa)
Strain
(b)
Figure 3.20: Experimental true stress-strain curves of the MN11 Mg alloy at different
temperatures. (a) Compression along ED. (b) Tension along ED.
The yield stresses in tension (TYS) and compression (CYS) were calculated as the true
stress at 0.2% engineering strain and are plotted in Fig. 3.21 as a function of temperature.
The TYS gradually decreased with increasing temperature while the CYS decreased from
-175◦C to 50◦C and increased thereafter up to a maximum at 250◦C before decreasing
83
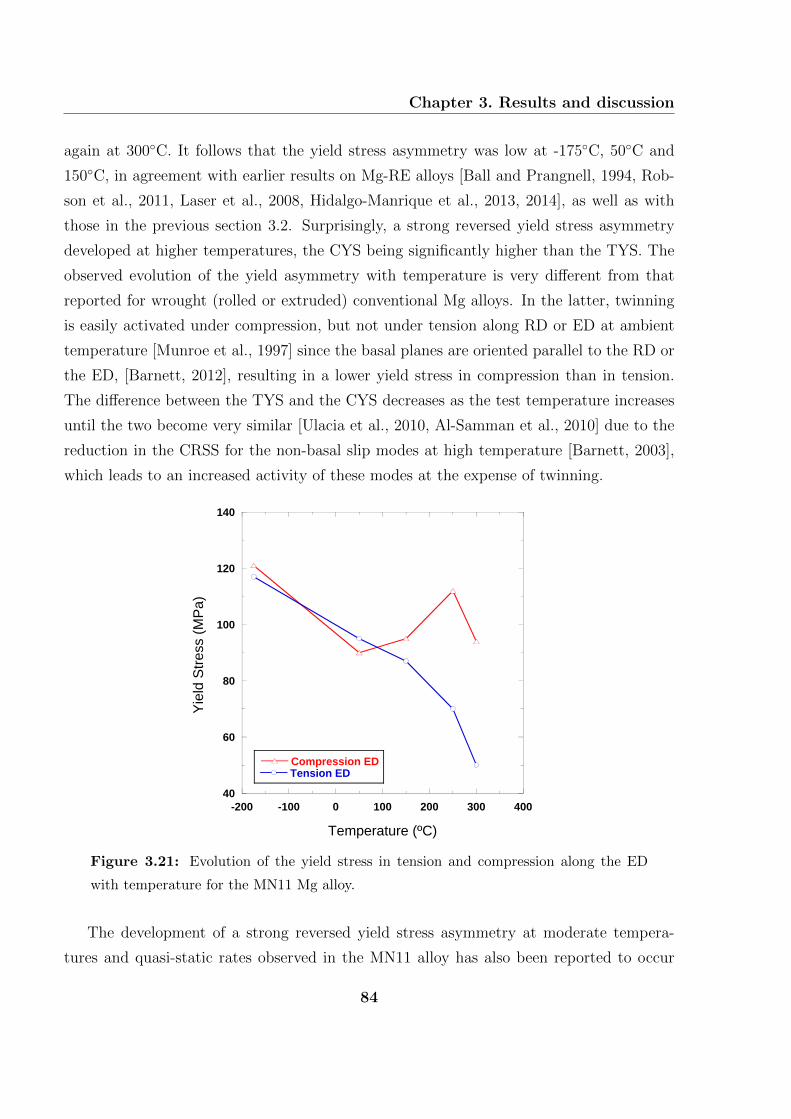
Chapter 3. Results and discussion
again at 300◦C. It follows that the yield stress asymmetry was low at -175◦C, 50◦C and
150◦C, in agreement with earlier results on Mg-RE alloys [Ball and Prangnell, 1994, Rob-
son et al., 2011, Laser et al., 2008, Hidalgo-Manrique et al., 2013, 2014], as well as with
those in the previous section 3.2. Surprisingly, a strong reversed yield stress asymmetry
developed at higher temperatures, the CYS being significantly higher than the TYS. The
observed evolution of the yield asymmetry with temperature is very different from that
reported for wrought (rolled or extruded) conventional Mg alloys. In the latter, twinning
is easily activated under compression, but not under tension along RD or ED at ambient
temperature [Munroe et al., 1997] since the basal planes are oriented parallel to the RD or
the ED, [Barnett, 2012], resulting in a lower yield stress in compression than in tension.
The difference between the TYS and the CYS decreases as the test temperature increases
until the two become very similar [Ulacia et al., 2010, Al-Samman et al., 2010] due to the
reduction in the CRSS for the non-basal slip modes at high temperature [Barnett, 2003],
which leads to an increased activity of these modes at the expense of twinning.
40
60
80
100
120
140
-200 -100 0 100 200 300 400
Compression EDTension ED
Yie
ld S
tress
(MP
a)
Temperature (ºC)
Figure 3.21: Evolution of the yield stress in tension and compression along the ED
with temperature for the MN11 Mg alloy.
The development of a strong reversed yield stress asymmetry at moderate tempera-
tures and quasi-static rates observed in the MN11 alloy has also been reported to occur
84
3.3 MN11 Mg alloy at different temperatures
in other Mg-RE alloys [Bettles et al., 2009, Hou et al., 2009]. For example, the age-
hardenable Mg-8Gd-2Y-1Nd-0.3Zn-0.6Zr (wt.%) alloy presents an isotropic behavior at
ambient temperature, but is stronger in compression than in tension at elevated tempera-
ture [Hou et al., 2009]. In the absence of twinning at such high temperatures, the reversed
yield stress asymmetry was attributed to varying interactions of dislocations with solute
atoms and precipitates in tension and compression, but no further details were given. The
age-hardenable Mg-1.7Nd-1RE-Zn-Zr (wt.%) alloy was also reported to exhibit a similar
reversed yield asymmetry, whose maximum was found to depend on the grain size [Bet-
tles et al., 2009]. Finally, the compressive yield strength became higher than tensile yield
strength at ambient temperature in the Mg-6Y-7Gd-0.5Zr (wt.%) [Robson et al., 2011],
the Mg-Y2O3 composites [Garces et al., 2006] and the Mg93Zn6Ho alloy [Singh et al., 2007]
when the grain size was reduced to about 2 µm, which led to the suppression of twin-
ning. In summary, although the origin for the reversed yield asymmetry in RE-containing
Mg alloys is still unknown, this phenomenon becomes apparent under conditions in which
twinning is difficult.
With the aim of analyzing the incidence of twinning in the deformation of MN11 Mg
alloy, the texture and microstructure of specimens deformed in compression up to an engi-
neering strain of 5% at 10−3s−1 at 50◦C and 250◦C were examined by electron backscatter
diffraction (Fig. 3.22). It can be inferred from the orientation imaging maps that twins
are indeed more abundant in the sample compressed at 50◦C (Fig. 3.23(a)) than in the
sample compressed at 250◦C (Fig. 3.23(b)). The reduced twinning activity at 250◦C tem-
perature may be consistent with a relative decrease in the CRSS of non-basal modes with
respect to that of twinning, commonly observed in Mg alloys [Barnett, 2003], and with
the hindering of twin nucleation at grain boundaries by increased Nd segregation. Grain
boundaries are generally considered to be the most common sites for twin nucleation and
thus any phenomenon that modifies the structure or chemistry of these boundaries could
also influence twin nucleation [Jain et al., 2010]. In any case twinning at 250◦C was scarce,
in agreement with previous studies [Robson et al., 2011, Bettles et al., 2009, Hou et al.,
2009, Garces et al., 2006, Singh et al., 2007], and cannot be responsible for the reversed
yield asymmetry.
More accurate information on the active deformation modes at low and high temper-
ature was obtained by means of macrotexture analysis by X-ray diffraction in the gauge
section of specimens tested at 50◦C and 250◦C. Fig. 3.23 illustrates the inverse pole figures
85

Chapter 3. Results and discussion
Figure 5
Figure 6
3
Figure 3.22: Electron backscatter diffraction inverse pole figure maps in the ED of spec-
imens compressed up to 5% engineering strain at 10−3s−1 at different temperatures. (a)
50◦C and (b) 250◦C. The non-indexed points are shown as black pixels. The boundaries
having a misorientation of 86◦ (� 5◦) have been depicted as white lines. The compression
axis is horizontal.
showing the orientation of the ED of specimens deformed at 50◦C in compression up to
30% engineering strain (Fig. 3.23(a)) and in tension up to failure (Fig. 3.23(b)) as well
as at 250◦C in compression up to 40% engineering strain (Fig. 3.23(c)) and in tension
up to failure (Fig. 3.23(d)). By comparison with the texture of the as-extruded material
(Fig. 3.19(a)), it can be stated that a depletion of orientations close to the h1010i-h1120iboundary takes place in compression at 50◦C (Fig. 3.23(a)), while a depletion of orienta-
tions in the vicinity of the h0001i pole takes place in tension (Fig. 3.23(b)) at the same
temperature. This is consistent with the occurrence of twinning under both tension and
compression at this temperature. Note that extension twinning, leading to a rapid 86◦
reorientation of the lattice, is only active when the resolved applied stress results in an ex-
tension of the c axis. Therefore, twinning occurs in compression in grains with their c axis
approximately perpendicular to the ED or to the compression axis (situated in the region
near the h1010i-h1120i boundary of the unit triangle) and reorients the c axis nearly paral-
lel to the compression axis [Calnan and Clews, 1951]. On the contrary, twinning occurs in
tension in crystals with their c axis approximately parallel to the ED or to the tension axis
(close to the h0001i pole of the unit triangle) and reorients the c axis nearly perpendicular
to the tension axis [Calnan and Clews, 1951]. The mentioned depletion of orientations close
to the h1010i-h1120i boundary during compression at 250◦C (Fig. 3.23(c)) is much less
86

3.3 MN11 Mg alloy at different temperatures
apparent than at 50◦C (Fig. 3.23(a)), especially around the h1120i pole. This is indicative
of a lower reliance on twinning to accommodate deformation and, therefore, of a more
prominent role of non-basal slip at 250◦C. The fact that the orientation density is higher
around the h1120i pole than around the h1010i, reveals that the role of pyramidal hc+aislip is more important than that of prismatic slip. Similarly, the mentioned depletion of
orientations in the vicinity of the h0001i pole during tension at 250◦C (Fig. 3.23(d)) is
somewhat less apparent than at 50◦C (Fig. 3.23(b)). This is also indicative of a higher
reliance on pyramidal hc+ai slip at the expense of twinning to accommodate deformation.
Figure 7
Figure 8
Figure 9
4
Figure 3.23: Inverse pole figures obtained by X-ray diffraction showing the orientation
of the ED in specimens deformed under different conditions. (a) 50◦C under compression
up to 30% engineering strain. (b) 50◦C under tension up to failure. (c) 250◦C under
compression up to 40% engineering strain. (d) 250◦C under tension up to failure. The
numbers in the legend indicate multiples of random distribution.
Thus, the experimental observations seem to indicate that the inverse yield asymme-
try observed in the MN11 Mg alloy at high temperature is related to the preponderance
of pyramidal slip with respect to twinning but it is not demonstrated whether or not
this mechanism can explain the experimental results. This inverse optimization strategy
developed in this thesis was used to this end.
87

Chapter 3. Results and discussion
3.3.3 Optimization strategy and results
The effective behavior of the MN11 Mg alloy at different temperatures was determined
by means of the CPFE simulation of a RVE of the polycrystalline microstructure. If not
indicated otherwise, the optimization strategy is identical to that presented in the previous
section for MN10 and MN11 Mg alloys. The simulations were carried out with an RVE
including 125 grains and 1 voxel per grain. A few simulations with an RVE containing
1000 crystals were also performed and the differences with the smaller RVE were below
2%.
The experimental stress-strain curves in tension and compression (Fig. 3.20) were used
input in the optimization analysis at each temperature. The optimization procedure based
on the Levenberg-Marquardt algorithm provided sets of parameters that accurately fitted
both tension and compression curves at -175◦C, 50◦C and 150◦C. It was not possible,
however, to find sets of parameters able to fit both curves at 250◦C and 300◦C. The
reversed yield asymmetry (the compressive yield stress was higher than the tensile one) at
these temperatures could only be taken into account by the only polar mechanism in the
crystal plasticity model (tensile twinning), but twinning could hardly be responsible of this
behavior because (1) the random texture induces a very similar effect of twinning in both
tension and compression and (2) the twinning activity at high temperature was negligible
(see Fig. 3.22).
If tensile twinning cannot be the origin of the reversed yield asymmetry, the only
possibility to account for this behavior has to be found in the development of non-Schmid
effects for the activation of the pyramidal hc+ai mode. This assumption was introduced by
Bassani [Qin and Bassani, 1992] and Asaro [Dao and Asaro, 1993] in the past to account for
the anomalous deformation of some single crystals and intermetallic alloys. Accordingly,
the Schmid law was modified and the resolved shear stress in the slip system α, τα, was
substituted by an effective shear stress τ ∗α, which is given by
τ ∗α = τα + S : η (3.1)
where S is the corresponding stress tensor (see chapter 2 for more details) and
τα = S : (s n) (3.2)
is the Schmid stress, i.e. the resolved shear stress on the slip system α characterized by
88

3.3 MN11 Mg alloy at different temperatures
the vector n normal to the slip plane and the vector s along the slip direction. The second
term of equation 3.1 is the non-Schmid contribution to the effective shear stress, where
η is a general non-Schmid tensor that accounts for the influence of the different stress
components on effective shear stress.
This model has been successfully applied to BCC materials [Bassani et al., 2001, Vitek
et al., 2004, Yalcinkaya et al., 2008], where the asymmetry of the dislocation cores justifies
the influence of non-Schmid stresses on the dislocation mobility, but it is not clear that
it can be applied to model the asymmetry between tension and compression in pyramidal
hc+ai systems of HCP crystals. Atomistic simulations suggested that non-Schmid stresses
might have an effect on the slip of pyramidal hc+ai dislocations connected with dynamic
dissociation [Yalcinkaya et al., 2008], while other recent studies [Yoo et al., 2001, Jones and
Hutchinson, 1981] relate a possible effect of non-Schmid stresses to the cross-slip of hc+aiscrew dislocations. In addition to the effect of non-Schmid stresses, atomistic simulations
have demonstrated that slip in the pyramidal hc+ai mode in Mg is directional [Jones and
Hutchinson, 1981]. Thus, the shear stress necessary to move a hc+ai dislocation depends
on the direction of the applied shear stress and this is probably due to the asymmetry
of the dislocation core. This phenomenon is independent of other stress components and
cannot be strictly considered a non-Schmid effect.
The directionality of the pyramidal hc+ai mode is not enough to justify the experi-
mental yield asymmetry and it is necessary to introduce non-Schmid terms to account for
the effect of hydrostatic stresses. In order to account for both effects (directionality and
hydrostatic stresses), a new definition of the effective shear stress is proposed here. Only
one additional stress term is included in the expression of the effective shear stress, which is
the projection of the global stress tensor along the c axis of the hexagonal lattice according
to:
τ ∗α = hjταj+ ηccS : (c c)isign(τα) (3.3)
where c is a unit vector along the c axis. The parameter ηcc takes into account both the
non-Schmid component in the direction of n and the directionality in the shear component.
The inverse optimization procedure was carried out using equation 3.3 to compute the
effective shear stress for the pyramidal hc+aimode in the whole temperature range. A value
of ηcc = 0.185 was selected, the minimum one to reproduce the experimental inverse yield
asymmetry of the strain-stress curves at 250◦C and 300◦C. The influence of this parameter
89

Chapter 3. Results and discussion
in the optimization results was negligible at lower temperatures (from -175◦C to 150◦C)
because because the activity of pyramidal hc+ai slip was minimum in this temperature
range. In fact, using ηcc = 0 or to 0.185 did not modify the results at these temperatures.
The experimental stress-strain curves in tension and compression and the curves ob-
tained from the inverse optimization procedure are plotted in Figs. 3.24(a), (b), (c), (d)
and (e) for -175◦C, 50◦C, 150◦C, 250◦C and 300◦, respectively. The agreement between
experimental and numerical results is remarkable in the whole temperature range, which
demonstrates again the ability of the optimization procedure and of the modified crystal
plasticity model to capture the anisotropic mechanical response of Mg alloys. Moreover,
inverse yield asymmetry at 250◦C and 300◦ is accurately predicted by the crystal plasticity
finite element simulations.
The values of the initial CRSS, τ0,c, the saturation CRSS, τsat, and initial hardening
modulus, h0, for each deformation mode provided by the optimization strategy are given
in Table 3.7. In addition, the evolution of the initial CRSS, τ0,c, with temperature for
each slip mode and twinning has been plotted in Fig. 3.25. It should be noted that non-
Schmid effects, as given by equation 3.3, were only considered in the simulations at 250◦C
and 300◦C because their influence was negligible at �175◦C, 50◦C and 150◦C because the
activity of pyramidal hc+ai slip was limited.
It can be observed that the CRSSs of all slip modes as well as tensile twinning were
relatively similar at 50◦C, in agreement with the results presented in the previous section
3.2. Broadly speaking, deformation from cryogenic temperature (-175◦C) up to 150◦ was
mainly controlled by basal and prismatic slip at the initial stages of deformation, while
the contribution of tensile twinning and of pyramidal hc+ai slip was limited, Figs. 3.25(a)
to (d). As a result, the yield strength in tension and compression was similar in this
temperature range, following the reported effect of RE additions on the properties of Mg
alloys. The contribution of pyramidal hc+ai became more important at the expense of
twinning in this temperature range at strains above 8% in compression, thus the strain
hardening rate in compression was much higher than in tension because the CRSS for
pyramidal hc+ai slip was much higher than that of twinning.
Nevertheless, pyramidal hc+ai slip became dominant in tension and compression at
250◦C and above, Figs. 3.26(e) and (f), from the beginning of deformation , leading to
a marked inverse yield anisotropy. The activity of pyramidal hc+ai in compression was,
however, reduced as compared with the tensile tests at the same temperature (and the
90

3.3 MN11 Mg alloy at different temperatures
Parameter Deformation Temperature (◦C)
mode -175 50 150 250 300
τ0,c
Basal 33 40 40 100 100
Pyramidal hc+ai 98 52 52 33 24
Prismatic 35 36 30 70 91
Twinning 47 33 38 98 100
τsat
Basal 575 131 139 111 320
Pyramidal hc+ai 1621 80 58 142 31
Prismatic 49 40 33 91 101
Twinning 194 78 76 158 111
h0
Basal 635 408 283 248 165
Pyramidal hc+ai 10 11 38 73 124
Prismatic 464 946 1460 144 482
Twinning 771 503 200 229 355
Table 3.7: Optimum values of the parameters that define the mechanical behavior of
each slip mode and extension twinning in MN11 Mg alloy as a function of temperature.
Magnitudes are expressed in MPa.
contribution of prismatic slip enhanced), because of the non-Schmid effects on the effective
shear stress on the slip plane. These results suggest that the microstructural changes that
take place within this temperature range, i.e., the precipitation of Mg3Nd plates and Nd
segregation to grain boundaries, increase significantly the CRSSs for basal and prismatic
slip as well as twinning, while CRSS for pyramidal hc+ai slip was not influenced by these
microstructural changes and decreased as the temperature increased.
91

Chapter 3. Results and discussion
0
100
200
300
400
500
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Compression EDTension ED
Stre
ss (M
Pa)
Strain
(a)
0
100
200
300
400
500
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Compression EDTension ED
Stre
ss (M
Pa)
Strain
(b)
0
100
200
300
400
500
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Tension EDCompression ED
Stre
ss (M
Pa)
Strain
(c)
0
100
200
300
400
500
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Tension EDCompression ED
Stre
ss (M
Pa)
Strain
(d)
0
100
200
300
400
500
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Tension EDCompression ED
Stre
ss (M
Pa)
Strain
(e)
Figure 3.24: Experimental (solid lines) and simulated (broken lines) stress-strain curves
in tension and compression along ED in MN11 Mg alloy at different temperatures.(a)
-175◦C. (b) 50◦C. (c) 150◦C. (d) 250◦C, (e) 300◦C.
92
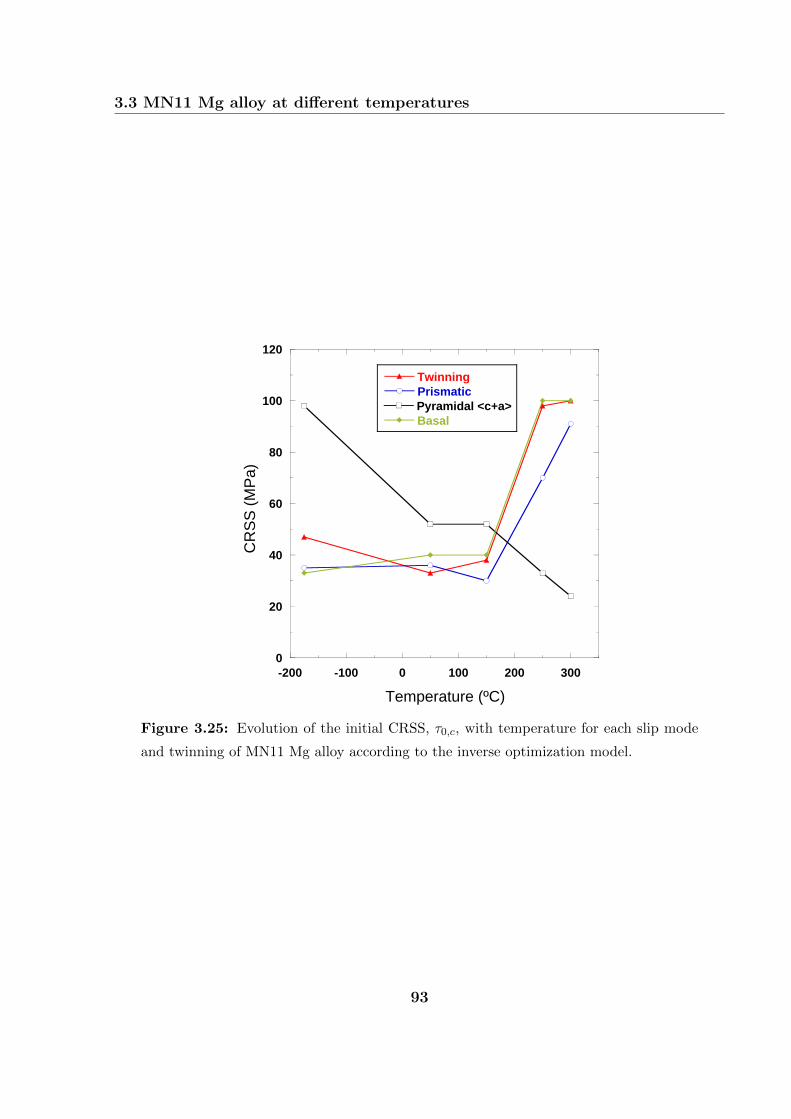
3.3 MN11 Mg alloy at different temperatures
0
20
40
60
80
100
120
-200 -100 0 100 200 300
TwinningPrismaticPyramidal <c+a>Basal
CR
SS
(MP
a)
Temperature (ºC)
Figure 3.25: Evolution of the initial CRSS, τ0,c, with temperature for each slip mode
and twinning of MN11 Mg alloy according to the inverse optimization model.
93

Chapter 3. Results and discussion
0
0.2
0.4
0.6
0.8
1
0.04 0.08 0.12 0.16 0.2
TwinningPyramidal <c+a>PrismaticBasal
Rel
ativ
e C
ontri
butio
n
Strain
(a)
0
0.2
0.4
0.6
0.8
1
0.04 0.08 0.12 0.16 0.2
TwinningPyramidal <c+a>PrismaticBasal
Rel
ativ
e C
ontri
butio
nStrain
(b)
0
0.2
0.4
0.6
0.8
1
0.05 0.1 0.15 0.2 0.25 0.3 0.35
TwinningPyramidal<c+a>PrismaticBasal
Rel
ativ
e C
ontri
butio
n
Strain
(c)
0
0.2
0.4
0.6
0.8
1
0.05 0.1 0.15 0.2 0.25 0.3 0.35
TwinningPyramidal <c+a>PrismaticBasal
Rel
ativ
e C
ontri
butio
n
Strain
(d)
0
0.2
0.4
0.6
0.8
1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
TwinningPyramidal <c+a>PrismaticBasal
Rel
ativ
e C
ontri
butio
n
Strain
(e)
0
0.2
0.4
0.6
0.8
1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
TwinningPyramidal <c+a>PrismaticBasal
Rel
ativ
e C
ontri
butio
n
Strain
(f)
Figure 3.26: Relative contribution of each deformation mode to the plastic strain as
a function of temperature and loading (tension or compression along the ED) in MN11
Mg alloy. (a) -175◦C, tension. (b) -175◦C, compression. (c) -50◦C, tension. (d) 50◦C,
compression. (e) 250◦C, tension. (f) 250◦C, compression.
94

Chapter 4Conclusions and future work
4.1 Conclusions
The following conclusions can be drawn from the work presented in this thesis:
� An inverse optimization strategy has been developed to determine the single crys-
tal properties from the experimental results of the mechanical behavior of polycrystals.
The polycrystal behavior was obtained by means of the finite element simulation of an
RVE of the microstructure in which the constitutive equation of each grain was modeled
by means of crystal plasticity model which took into account the physical deformation
mechanisms, e.g. slip and twinning. The inverse problem was solved by means of the
Levenberg-Marquardt algorithm and the efficiency of the optimization strategy from the
computational viewpoint was greatly improved by means of a hierarchical approach. Thus,
the iterative optimization process began using a simple RVE in which each grain is repre-
sented by one voxel and changed to more complex and realistic RVEs once the optimization
algorithm reached the optimum solution for this RVE. Moreover, the full procedure is au-
tomatized in the form a python script to facilitate its practical implementation.
� The inverse optimization strategy was successfully applied to a rolled polycrystalline
AZ31 Mg alloy, showing a marked basal texture and a strong plastic anisotropy. Four
different deformation mechanisms (basal, prismatic and pyramidal hc+ai slip together with
tensile twinning) were included in each grain and 12 different parameters (the initial CRSS,
τ0,c, the saturation CRSS, τsat and the initial hardening modulus, h0, for each system) were
obtained from the optimization. The robustness of the inverse optimization strategy to
95

Chapter 4. Conclusions and future work
provide a good approximation of the input experimental curves was clearly shown. In
addition, the validity of the results was demonstrated by the accurate prediction of the
mechanical response of the polycrystal under loading conditions different from those used as
input for the optimization process. Finally, the critical role played by the input information
on the accuracy of the parameters obtained from the inverse optimization strategy was
proven.
� The inverse optimization strategy was also applied to study the influence of Nd
content on mechanisms controlling the mechanical behavior extruded polycrystalline Mg-
Mn (1 wt. %) alloys. It was found that the differences in the CRSSs for basal, prismatic
and pyramidal hc+ai slip as well as for tensile twinning disappeared at room temperature
when the Nd content was around 1 wt. %, leading to an isotropic mechanical response
regardless of the orientation and loading mode (tension or compression). The analysis
was extended from -175◦ C to 300◦C in the case of the Mg-Mn (1 wt. %)- Nd (1 wt.
%) alloy, which presented a marked inverse yield strength asymmetry (the compressive
yield strength being higher than the tensile one) at high temperature (� 250◦C). The
inverse optimization strategy demonstrated that the transition from an isotropic behavior
at temperatures � 150◦C to the development of a inverse yield strength asymmetry at
temperatures � 250◦C was due to a change in the dominant deformation mechanisms at
the single crystal level: plastic deformation was controlled by basal and prismatic slip and
tensile twinning below 150◦C and by pyramidal hc+ai slip at 250◦C and above. The inverse
optimization strategy demonstrated that the origin of the inverse yield stress asymmetry
at high temperature has to be primarily ascribed to non-Schmid effects on the CRSS on
pyramidal planes and thus on the mobility of the hc+ai dislocations.
4.2 Future work
The inverse optimization strategy developed in this thesis is a powerful and unique tool
to determine reliable values of the CRSSs of the different slip and twinning modes in single
crystals (which are difficult to obtain in most cases) from the mechanical response of poly-
crystals. This information is critical for mesoscale multiscale modeling strategies aimed at
providing physically-based constitutive equations for polycrystals from the microstructural
features of the material (size, shape, spatial orientation an properties of the single crystals).
The application of this strategy to different materials and loading conditions is an obvious
96

4.2 Future work
route of future work for materials science researchers and metallurgists. In addition, from
the solid mechanics perspective, there are several areas to improve the strategy developed.
They include the following topics:
� The mechanical response of each deformation mode (either slip or twinning) within
each crystal is modeled with a phenomenological law expressed by a power-law dependency
of the shear strain rate with the resolved shear stress. The implementation of physically-
based laws (including physical parameters that can be obtained form models at lower
length scales or obtained from the optimization procedure) will help to reduce the number
of parameters in the optimization strategy and to increase the range of applicability of the
results. For instance, activation energies obtained from the optimization process can be
used to predict the mechanical behavior as a function of strain rate and/or temperature
without the corresponding mechanical tests in polycrystals under these conditions.
� The current twinning model is known to predict accurately the global behavior of
polycrystals but it has many limitations from the local viewpoint. The mechanisms of
twin nucleation and growth are still under debate and this is a a very active research area.
The implementation in the crystal plasticity framework of better twining models capable of
predicting the influence of grain boundary misorientation and grain size on twin nucleation
as well as of physically-based models for twin growth and re-slip will improve the predictive
capabilities of the overall strategy.
� It has been shown that the richness of the input data is critical for the accuracy of
the parameters obtained by optimization strategy. Thus, extension of the error function
to include other experimental information (such as the evolution of the texture or of the
volume fraction of twinned material) is expected to increase greatly the accuracy.
� The implementation of spectral methods (Fast Fourier Transform) to solve the bound-
ary value problem of the RVE is important to speed up the optimization process and to
include larger RVEs which reproduce more accurately the microstructure of the polycrystal.
� Grain boundary sliding and fracture may be an important deformation mechanism
in polycrystals, particularly at high temperature and low strain rates (creep). The incor-
poration of this mechanism to the inverse optimization strategy is also very appealing to
provide information about the grain boundary properties which are also very difficult to
obtain experimentally. This will require the use of different discretization for the grains
within the RVE based on polyhedra obtained by means of Voronoi tessellation and the
introduction of the appropriate constitutive equations and/or interface elements for the
97

Chapter 4. Conclusions and future work
grain boundaries.
98

Appendix ACrystal properties
# Name: MN11_adjust
# C11, C12,C44,C13,C33,C66
58E9,25e9,16.6E9,20.8E9,61.2E9,16.6E9
#Viscoplastic law: gamma_0, rate sensitivity exponent
1.,0.10
# number of slip modes
# number of basal, pir[c+a], prys and pir[a] systems
# number of twinning modes and twinning systems
# number of re-slip systems modes
4
3,12,3,6
1,6
24
# normalv, tangent, mode ( the modes order is basal,pir[c+a],prys,pir[a],Tensile Twinning)
0,0,1,-0.866025403784439,0.5,0,1
0,0,1,-0.866025403784439,-0.5,0,1
0,0,1,0,1,0,1
0.882256902898182,0,0.470768262830565,-0.454287159974388,0.262282814100603,0.851370014570559,2
0.882256902898182,0,0.470768262830565,-0.454287159974388,-0.262282814100603,0.851370014570559,2
0.441128451449091,0.764056890574006,0.470768262830565,-0.454287159974388,-0.262282814100603,0.851370014570559,2
0.441128451449091,0.764056890574006,0.470768262830565,0,-0.524565628201207,0.851370014570559,2
-0.441128451449091,0.764056890574006,0.470768262830565,0,0.524565628201207,-0.851370014570559,2
-0.441128451449091,0.764056890574006,0.470768262830565,0.454287159974388,-0.262282814100603,0.851370014570559,2
0.882256902898182,0,-0.470768262830565,0.454287159974388,0.262282814100603,0.851370014570559,2
0.882256902898182,0,-0.470768262830565,0.454287159974388,-0.262282814100603,0.851370014570559,2
0.441128451449091,0.764056890574006,-0.470768262830565,0,0.524565628201207,0.851370014570559,2
0.441128451449091,0.764056890574006,-0.470768262830565,0.454287159974388,0.262282814100603,0.851370014570559,2
-0.441128451449091,0.764056890574006,-0.470768262830565,0,0.524565628201207,0.851370014570559,2
-0.441128451449091,0.764056890574006,-0.470768262830565,-0.454287159974388,0.262282814100603,0.851370014570559,2
1,0,0,0,1,0,3
0.5,0.866025403784439,0,-0.866025403784439,0.5,0,3
99

Appendix A. Crystal properties
0.5,-0.866025403784439,0,-0.866025403784439,-0.5,0,3
0.882256902898182,0,0.470768262830565,0,1,0,4
0.441128451449091,0.764056890574006,0.470768262830565,-0.866025403784439,0.5,0,4
-0.441128451449091,0.764056890574006,0.470768262830565,-0.866025403784439,-0.5,0,4
0.882256902898182,0,-0.470768262830565,0,1,0,4
0.441128451449091,0.764056890574006,-0.470768262830565,-0.866025403784439,0.5,0,4
-0.441128451449091,0.764056890574006,-0.470768262830565,-0.866025403784439,-0.5,0,4
0.683762260317027,0,0.729704852228729,-0.729704852228729,0,0.683762260317027,5
0.341881130158513,0.592155487583613,0.729704852228729,-0.364852426114364,-0.631942939294849,0.683762260317027,5
-0.341881130158513,0.592155487583613,0.729704852228729,0.364852426114364,-0.631942939294849,0.683762260317027,5
-0.683762260317027,0,0.729704852228729,0.729704852228729,0,0.683762260317027,5
-0.341881130158513,-0.592155487583613,0.729704852228729,0.364852426114364,0.631942939294849,0.683762260317027,5
0.341881130158513,-0.592155487583613,0.729704852228729,-0.364852426114364,0.631942939294849,0.683762260317027,5
# Matrix hardening coefficients qi,j,k,l,m,n (From qbasal-basal to qtw-tw)
1.0000E+00,1.0000E+00,1.0000E+00,1.0000E+00,2.0000E+00
1.0000E+00,1.0000E+00,1.0000E+00,1.0000E+00,2.0000E+00
1.0000E+00,1.0000E+00,1.0000E+00,1.0000E+00,2.0000E+00
1.0000E+00,1.0000E+00,1.0000E+00,1.0000E+00,2.0000E+00
0,0,0,0,1.0000E+00
# Single crystal behavior based on Asaro-Needleman: tau0,taus,h0
100000000,319610994,1780000000,0
12721486.2,28620094.6,50000000,0
40000000,77061942,1500000000,0
15000000000,20000000000,1500000000,0
100000000,111000000,354807542,0
# Control of subroutine: TOLER, TOLER_JAC, Nmax iter, Nmax iter JAC,strain_inc, IMPLICIT HARD (yes=1)
1d-7,1D-7,250,5,1D-6,0
# Single crystal behavior based on Kothari: a_sl, a_tw
6.0000E-01,1.0000E+00
# Definition of twinning
# fb(beta-i) (initial fraction of twinning for each twinning system)
0.0
0.0
0.0
0.0
0.0
0.0
# fdotb(CT),fdotb(TT) (fdotbA·gammatwin=gamma_0=1.0)7.752
# gammatwin
0.129
# fbsum_max, fb_acti_re_slip
0.80,0.80
100

Bibliography
Abaqus (2013). Analysis User’s manual. Abaqus version 6.13.
Agnew, S., Yoo, M., and Tome, C. (2001). Application of texture simulation to under-
standing mechanical behavior of Mg and solid solution alloys containing Li or Y. Acta
Materialia, 49(20):4277 – 4289.
Akhtar, A. and Teghtsoonian, E. (1969). Solid solution strengthening of magnesium single
crystals-I alloying behaviour in basal slip. Acta Metallurgica, 17(11):1339 – 1349.
Al-Samman, T., Li, X., and Chowdhury, S. G. (2010). Orientation dependent slip and
twinning during compression and tension of strongly textured magnesium AZ31 alloy.
Materials Science and Engineering: A, 527(15):3450 – 3463.
Alam, M. E., Han, S., Nguyen, Q. B., Hamouda, A. M. S., and Gupta, M. (2011). De-
velopment of new magnesium based alloys and their nanocomposites. Journal of Alloys
and Compounds, 509(34):8522 – 8529.
Anand, L. (2004). Single-crystal elasto-viscoplasticity: Application to texture evolution
in polycrystalline metals at large strains. Computer Methods in Applied Mechanics and
Engineering, 193(48-51):5359 – 5383. Advances in Computational Plasticity.
Arsenlis, A. and Parks, D. M. (2002). Modeling the evolution of crystallographic dislocation
density in crystal plasticity. Journal of the Mechanics and Physics of Solids, 50(9):1979
– 2009.
Asaro, R. and Needleman, A. (1985). Overview no. 42 Texture development and strain
hardening in rate dependent polycrystals. Acta Metallurgica, 33(6):923 – 953.
Asaro, R. and Rice, J. (1977). Strain localization in ductile single crystals. Journal of the
Mechanics and Physics of Solids, 25(5):309 – 338.
101

Bibliography
Avedesian, M. M. and Baker, H. (1999). Magnesium and Magnesium Alloys. ASM Inter-
national.
Azzeddine, H. and Bradai, D. (2013). On some aspects of compressive properties and
serrated flow in Mg-Y-Nd-Zr alloy. Journal of Rare Earths, 31(8):804 – 810.
Bachmann, F., Hielscher, R., and Schaeben, H. (2010). Texture analysis with MTEX-Free
and Open Source Software Toolbox. Solid State Phenomena, 160:63–68.
Ball, E. and Prangnell, P. (1994). Tensile-compressive yield asymmetries in high strength
wrought magnesium alloys. Scripta Metallurgica et Materialia, 31(2):111 – 116.
Barbe, F., Decker, L., Jeulin, D., and Cailletaud, G. (2001). Intergranular and intragranular
behavior of polycrystalline aggregates. Part 1: F.E. model. International Journal of
Plasticity, 17(4):513 – 536.
Barnett, M. (2003). A taylor model based description of the proof stress of magnesium
AZ31 during hot working. Metallurgical and Materials Transactions A: Physical Metal-
lurgy and Materials Science, 34(9):1799–1806.
Barnett, M. (2012). Twinning and its role in wrought magnesium alloys. Advances in
Wrought Magnesium Alloys, pages 105 – 143.
Barnett, M., Keshavarz, Z., and Ma, X. (2006). A semianalytical sachs model for the flow
stress of a magnesium alloy. Metallurgical and Materials Transactions A, 37A(4):2283 –
2293.
Barton, N. R., Arsenlis, A., and Marian, J. (2013). A polycrystal plasticity model of
strain localization in irradiated iron. Journal of the Mechanics and Physics of Solids,
61:341–351.
Bassani, J., Ito, K., and Vitek, V. (2001). Complex macroscopic plastic flow arising from
non-planar dislocation core structures. Materials Science and Engineering: A, 319-321:97
– 101.
Bassani, J. L. and Wu, T.-Y. (1991). Latent hardening in single crystals II. Analytical
characterization and predictions. Proceedings of the Royal Society of London. Series A:
Mathematical and Physical Sciences, 435(1893):21–41.
102

Bibliography
Bettles, C., Gibson, M., and Zhu, S. (2009). Microstructure and mechanical behaviour of
an elevated temperature Mg-rare earth based alloy. Materials Science and Engineering:
A, 505(1-2):6 – 12.
Bishop, J. and Hill, R. (1951). XLVI. A theory of the plastic distortion of a polycrystalline
aggregate under combined stresses. Philosophical Magazine Series 7, 42(327):414–427.
Boehlert, C., Chen, Z., Chakkedath, A., Gutierrez-Urrutia, I., Llorca, J., Bohlen, J., Yi,
S., Letzig, D., and Perez-Prado, M. (2013). In situ analysis of the tensile deformation
mechanisms in extruded Mg-1Mn-1Nd (wt%). Philosophical Magazine, 93(6):598–617.
Bravais, A. (1850). Memoire sur les systemes formes par les points distribues regulierement
sur un plan ou dans l’espace. J. Ecole Polytech, 19:1–128.
Calnan, E. and Clews, C. (1951). XCIII. The development of deformation textures in
metals. part III. Hexagonal structures. Philosophical Magazine Series 7, 42(331):919–
931.
Capolungo, L., Beyerlein, I., and Tome, C. (2009). Slip-assisted twin growth in hexagonal
close-packed metals. Scripta Materialia, 60(1):32 – 35.
Cheong, K.-S. and Busso, E. P. (2004). Discrete dislocation density modelling of single
phase FCC polycrystal aggregates. Acta Materialia, 52(19):5665 – 5675.
Chino, Y., Kado, M., and Mabuchi, M. (2008). Enhancement of tensile ductility and stretch
formability of magnesium by addition of 0.2 wt%(0.035 at%)Ce. Materials Science and
Engineering: A, 494(1-2):343 – 349.
Dao, M. and Asaro, R. (1993). Non-schmid effects and localized plastic flow in intermetallic
alloys. Materials Science and Engineering: A, 170(1-2):143 – 160.
Dennis, J. and Schnabel, R. (1996). Numerical Methods for Unconstrained Optimization
and Nonlinear Equations. Classics in Applied Mathematics. Society for Industrial and
Applied Mathematics.
Diard, O., Leclercq, S., Rousselier, G., and Cailletaud, G. (2005). Evaluation of finite
element based analysis of 3D multicrystalline aggregates plasticity: Application to crys-
tal plasticity model identification and the study of stress and strain fields near grain
boundaries. International Journal of Plasticity, 21(4):691 – 722.
103
Bibliography
Dillamore, I. and Roberts, W. (1965). Preferred orientation in wrought and anneal-metals.
Acta Metallurgica, 10:271 – 280.
Dogan, E., I.Karaman, Foley, D., and Hartwig, K. (2013). Texture modification and mi-
crostructural design of AZ31 Mg alloy plate for better formability. Magnesium Workshop
Madrid.
Donegan, S., Tucker, J., Rollett, A., Barmak, K., and Groeber, M. (2013). Extreme value
analysis of tail departure from log-normality in experimental and simulated grain size
distributions. Acta Materialia, 61(15):5595 – 5604.
Dudamell, N., Hidalgo-Manrique, P., Chakkedath, A., Chen, Z., Boehlert, C., Galvez, F.,
Yi, S., Bohlen, J., Letzig, D., and Perez-Prado, M. (2013). Influence of strain rate on the
twin and slip activity of a magnesium alloy containing neodymium. Materials Science
and Engineering: A, 583:220 – 231.
Earl D. Mcbride, M. (1938). Absorbable metal in bone surgery: A further report on the use
of magnesium alloys. Journal of the American Medical Association, 111(27):2464–2467.
Eidel, B. (2011). Crystal plasticity finite-element analysis versus experimental results of
pyramidal indentation into (0 0 1) fcc single crystal. Acta Materialia, 59(4):1761 – 1771.
Eshelby, J. (1957). The determination of the elastic field of an ellipsoidal inclusion and
related problems. Procroya, 252:561–569.
Fernandez, A., Jerusalem, A., Gutierrez-Urrutia, I., and Perez-Prado, M. (2013). Three-
dimensional investigation of grain boundary-twin interactions in a Mg AZ31 alloy by
electron backscatter diffraction and continuum modeling. Acta Materialia, 61(20):7679
– 7692.
Fernandez, A., Perez-Prado, M., Wei, Y., and Jerusalem, A. (2011). Continuum modeling
of the response of a Mg alloy AZ31 rolled sheet during uniaxial deformation. Interna-
tional Journal of Plasticity, 27(11):1739 – 1757.
Garces, G., Rodrıguez, M., Perez, P., and Adeva, P. (2006). Effect of volume fraction
and particle size on the microstructure and plastic deformation of Mg-Y2o3 composites.
Materials Science and Engineering: A, 419(1-2):357 – 364.
104
Bibliography
Gianola, D. and Eberl, C. (2009). Micro and nanoscale tensile testing of materials. JOM,
61(3):24–35.
Gupta, M., Sharon, and N.M.L. (2011). Magnesium, Magnesium Alloys, and Magnesium
Composites. Wiley.
Hazanov, S. and Huet, C. (1994). Order relationships for boundary conditions effect in
heterogeneous bodies smaller than the representative volume. Journal of the Mechanics
and Physics of Solids, 42(12):1995 – 2011.
Herrera-Solaz, V., Hidalgo-Manrique, P., Perez-Prado, M., Letzig, D., Llorca, J., and
Segurado, J. (2014a). Effect of rare earth additions on the critical resolved shear stresses
of magnesium alloys. Materials Letters, 128:199 – 203.
Herrera-Solaz, V., LLorca, J., Dogan, E., Karaman, I., and Segurado, J. (2014b). An
inverse optimization strategy to determine single crystal mechanical behavior from poly-
crystal tests: Application to AZ31 Mg alloy. International Journal of Plasticity, 57:1 –
15.
Hidalgo-Manrique, P., Herrera-Solaz, V., Segurado, J., Llorca, J., Galvez, F., Ruano, O.,
Yid, S., and Perez-Prado, M. (2015). Origin of the reversed yield asymmetry in Mg-rare
earth alloys at high temperature. Acta Materialia. Submitted for publication.
Hidalgo-Manrique, P., Yi, S., Bohlen, J., Letzig, D., and Perez-Prado, M. (2013). Effect of
Nd additions on extrusion texture development and on slip activity in a Mg�Mn alloy.
Metallurgical and Materials Transactions A, 44(10):4819–4829.
Hidalgo-Manrique, P., Yi, S., Bohlen, J., Letzig, D., and Perez-Prado, M. (2014). Con-
trol of the Mechanical Asymmetry in an Extruded MN11 Alloy by Static Annealing.
Metallurgical and Materials Transactions A, 45(8):3282–3291.
Hill, R. (1963). Elastic properties of reinforced solids: Some theoretical principles. Journal
of the Mechanics and Physics of Solids, 11(5):357 – 372.
Hill, R. (1966). Generalized constitutive relations for incremental deformation of metal
crystals by multislip. Journal of the Mechanics and Physics of Solids, 14(2):95 – 102.
105

Bibliography
Hill, R. and Rice, J. (1972). Constitutive analysis of elastic-plastic crystals at arbitrary
strain. Journal of the Mechanics and Physics of Solids, 20(6):401 – 413.
Hou, X., Cao, Z., Sun, X., Wang, L., and Wang, L. (2012). Twinning and dynamic
precipitation upon hot compression of a Mg-Gd-Y-Nd-Zr alloy. Journal of Alloys and
Compounds, 525:103 – 109.
Hou, X., Peng, Q., Cao, Z., Xu, S., Kamado, S., Wang, L., Wu, Y., and Wang, L. (2009).
Structure and mechanical properties of extruded Mg-gd based alloy sheet. Materials
Science and Engineering: A, 520(1-2):162 – 167.
Huet, C. (1990). Application of variational concepts to size effects in elastic heterogeneous
bodies. Journal of the Mechanics and Physics of Solids, 38(6):813 – 841.
Hutchinson, J. (1976). Bounds and self-consistent estimates for creep of polycrystalline
materials. Proceedings of the Royal Society of London A, 348:101 – 127.
Hutchinson, W. and Barnett, M. (2010). Effective values of critical resolved shear stress for
slip in polycrystalline magnesium and other hcp metals. Scripta Materialia, 63(7):737 –
740. Viewpoint set no. 47 Magnesium Alloy Science and Technology.
Jackson, M. and Groeber, M. (2012). Dream.3d. http://dream3d.bluequartz.net.
Jain, J., Poole, W., Sinclair, C., and Gharghouri, M. (2010). Reducing the tension-
compression yield asymmetry in a Mg-8Al-0.5Zn alloy via precipitation. Scripta Mate-
rialia, 62(5):301 – 304.
Jiang, J., Godfrey, A., Liu, W., and Liu, Q. (2008). Microtexture evolution via deformation
twinning and slip during compression of magnesium alloy AZ31. Materials Science and
Engineering: A, 483a484:576 – 579. 14th International Conference on the Strength of
Materials.
Jones, I. and Hutchinson, W. (1981). Stress-state dependence of slip in Titanium-6Al-4V
and other H.C.P. metals. Acta Metallurgica, 29(6):951 – 968.
Kacher, J. and Minor, A. M. (2014). Twin boundary interactions with grain boundaries
investigated in pure rhenium. Acta Materialia, 81:1 – 8.
106

Bibliography
Kalidindi, S., Bronkhorst, C., and Anand, L. (1992). Crystallographic texture evolution in
bulk deformation processing of FCC metals. Journal of the Mechanics and Physics of
Solids, 40(3):537 – 569.
Kalidindi, S. R. (1998). Incorporation of deformation twinning in crystal plasticity models.
Journal of the Mechanics and Physics of Solids, 46(2):267 – 290.
Kim, G. S. (2011). Etudes submicroniques de la plasticite du monocristal de Mg. Theses,
Univerite De Grenoble.
Kim, J. J. and Han, D. S. (2008). Recent development and applications of magnesium alloys
in the Hyundai and Kia Motors Corporation. Materials Transactions, 49(5):894–897.
Knezevic, M., Levinson, A., Harris, R., Mishra, R. K., Doherty, R. D., and Kalidindi,
S. R. (2010). Deformation twinning in AZ31 Influence on strain hardening and texture
evolution. Acta Materialia, 58(19):6230 – 6242.
Koike, J., Kobayashi, T., Mukai, T., Watanabe, H., Suzuki, M., Maruyama, K., and
Higashi, K. (2003). The activity of non-basal slip systems and dynamic recovery at
room temperature in fine-grained AZ31B magnesium alloys. Acta Materialia, 51(7):2055
– 2065.
Kothari, M. and Anand, L. (1998). Elasto-viscoplastic constitutive equations for polycrys-
talline metals: Application to tantalum. Journal of the Mechanics and Physics of Solids,
46(1):51 – 83.
Kroner, E. (1961). Zur plastischen verformung des vielkristalls. Acta Metallurgica, 9(2):155
– 161.
Laser, T., Hartig, C., Nurnberg, M., Letzig, D., and Bormann, R. (2008). The influence of
calcium and cerium mischmetal on the microstructural evolution of Mg-3Al-1Zn during
extrusion and resulting mechanical properties. Acta Materialia, 56(12):2791 – 2798.
Lebensohn, R., Rollett, A., and Suquet, P. (2011). Fast fourier transform-based modeling
for the determination of micromechanical fields in polycrystals. Jom, 63(3):13–18.
Lebensohn, R. and Tome, C. (1993). A self-consistent anisotropic approach for the sim-
ulation of plastic deformation and texture development of polycrystals: Application to
zirconium alloys. Acta Metallurgica et Materialia, 41(9):2611 – 2624.
107

Bibliography
Levenberg, K. (1944). A method for the solution of certain non-linear problems in least
squares. Quarterly of Applied Mathematics, 2:164 – 168.
Leyson, G., Curtin, W., Hector, L., and Woodward, C. (2010). Quantitative prediction of
solute strengthening in aluminium alloys. Nature Materials, 9(9):750–755.
Liu, P., chang Xin, Y., and Liu, Q. (2011). Plastic anisotropy and fracture behavior of
AZ31 magnesium alloy. Transactions of Nonferrous Metals Society of China, 21(4):880
– 884.
Liu, Y., Wang, B., Yoshino, M., Roy, S., Lu, H., and Komanduri, R. (2005). Combined nu-
merical simulation and nanoindentation for determining mechanical properties of single
crystal copper at mesoscale. Journal of the Mechanics and Physics of Solids, 53(12):2718
– 2741.
Ludwig, W., King, A., Reischig, P., Herbig, M., Lauridsen, E. M., Schmidt, S., Proudhon,
H., Forest, S., Cloetens, P., Rolland du Roscoat, S., Buffiere, J. Y., Marrow, T. J., and
Poulsen, H. F. (2009). New opportunities for 3D materials science of polycrystalline
materials at the micrometre lengthscale by combined use of X-ray diffraction and X-ray
imaging. Materials Science and Engineering, A524:69–76.
Lyon, P., Wilks, T., and Syed, I. (2005). The influence of alloying elements and heat
treatment upon properties of Elektron 21 (EV31A) alloy. TMS Magnesium Technology,
pages 303 – 308.
Ma, A., Roters, F., and Raabe, D. (2006). A dislocation density based constitutive model
for crystal plasticity FEM including geometrically necessary dislocations. Acta Materi-
alia, 54(8):2169 – 2179.
Mackenzie, L. W. F., Davis, B., Humphreys, F. J., and Lorimer, G. W. (2007). The
deformation, recrystallisation and texture of three magnesium alloy extrusions. Materials
Science and Technology, 23(10):1173 – 1180.
Mandel, J. (1972). Plasticite classique et viscoplasticite: course held at the Department
of Mechanics of Solids, September-October, 1971. Courses and lectures - International
Centre for Mechanical Sciences. Springer-Verlag.
108

Bibliography
Marquardt, D. (1963). An algorithm for least-squares estimation of nonlinear parameters.
SIAM Journal on Applied Mathematics, 11:431 – 441.
Michel, J., Moulinec, H., and Suquet, P. (1999). Effective properties of composite materials
with periodic microstructure: a computetional approach. Compuational Methods in
Applied Mechanics and Engineering, 172:109–143.
Miehe, C., Schotte, J., and Lambrecht, M. (2002). Homogenization of inelastic solid ma-
terials at finite strains based on incremental minimization principles. Application to
the texture analysis of polycrystals. Journal of the Mechanics and Physics of Solids,
50(10):2123 – 2167.
Miehe, C., Schroder, J., and Schotte, J. (1999). Computational homogenization analysis in
finite plasticity simulation of texture development in polycrystalline materials. Computer
Methods in Applied Mechanics and Engineering, 171(3-4):387 – 418.
Molinari, A., Canova, G., and Ahzi, S. (1987). A self consistent approach of the large
deformation polycrystal viscoplasticity. Acta Metallurgica, 35(12):2983 – 2994.
Munroe, N., Tan, X., and Gu, H. (1997). Orientation dependence of slip and twinning in
HCP metals. Scripta Materialia, 36(12):1383 – 1386.
Nie, J. (2003). Effects of precipitate shape and orientation on dispersion strengthening in
magnesium alloys. Scripta Materialia, 48(8):1009 – 1015. ViewPoint Set No. 29 Phase
Transformations and Deformations in Magnesium Alloys.
Okamoto, H. (1998). Phase diagrams of Binary Magnesium alloys. ASM International.
Pekguleryuz, M., Kainer, K., and Kaya, A. (2013). Fundamentals of Magnesium Alloy
Metallurgy. Woodhead Publishing Series in Metals and Surface Engineering. Elsevier
Science.
Prasad, K. E., Rajesh, K., and Ramamurty, U. (2014). Micropillar and macropillar com-
pression responses of magnesium single crystals oriented for single slip or extension
twinning. Acta Materialia, 65:316 – 325.
Qin, Q. and Bassani, J. L. (1992). Non-associated plastic flow in single crystals. Journal
of the Mechanics and Physics of Solids, 40(4):835 – 862.
109

Bibliography
Quey, R., Dawson, P., and Barbe, F. (2011). Large-scale 3D random polycrystals for
the finite element method: Generation, meshing and remeshing. Computer Methods in
Applied Mechanics and Engineering, 200(17-20):1729 – 1745.
Reed-Hill, R. and Robertson, W. (1957a). Additional modes of deformation twinning in
magnesium. Acta Metallurgica, 5(12):717 – 727.
Reed-Hill, R. and Robertson, W. (1957b). The crystallographic characteristics of fracture
in magnesium single crystals. Acta Metallurgica, 5(12):728 – 737.
Remy, L. (1981). The interaction between slip and twinning systems and the influence of
twinning on the mechanical behavior of fcc metals and alloys. Metallurgical Transactions
A, 12(3):387–408.
Rice, J. (1971). Inelastic constitutive relations for solids: An internal-variable theory and
its application to metal plasticity. Journal of the Mechanics and Physics of Solids,
19(6):433 – 455.
Robertson, I. M., Schuh, C. A., Vetrano, J. S., Browning, N. D., Field, D. P., Jensen,
D. J., Miller, M. K., Baker, I., Dunand, D. C., Dunin-Borkowski, R., Kabius, B., Lozano-
Perez, T. K. T. S., Misra, A., Rohrer, G. S., Rollett, A. D., Taheri, M. L., Thompson,
G. B., Uchic, M., Wang, X. L., and Was, G. (2011). Towards an integrated materials
characterization toolbox. Journal of Materials Research, 26:1341–1383.
Robson, J., Twier, A., Lorimer, G., and Rogers, P. (2011). Effect of extrusion conditions
on microstructure, texture, and yield asymmetry in Mg�6Y� 7Gd� 0.5 wt%Zr alloy.
Materials Science and Engineering: A, 528(24):7247 – 7256.
Roters, F., Eisenlohr, P., Hantcherli, L., Tjahjanto, D., Bieler, T., and Raabe, D. (2010).
Overview of constitutive laws, kinematics, homogenization and multiscale methods in
crystal plasticity finite-element modeling: Theory, experiments, applications. Acta Ma-
terialia, 58(4):1152 – 1211.
Sachs, G. (1928). Plasticity problems in metals. Trans. Faraday Soc., 24:84–92.
Salem, A., Kalidindi, S., and Semiatin, S. (2005). Strain hardening due to deformation
twinning in α-titanium: Constitutive relations and crystal-plasticity modeling. Acta
Materialia, 53(12):3495 – 3502.
110
Bibliography
Sanchez-Martın, R., Perez-Prado, M., Segurado, J., Bohlen, J., Gutierrez-Urrutia, I.,
Llorca, J., and Molina-Aldareguia, J. (2014). Measuring the critical resolved shear
stresses in Mg alloys by instrumented nanoindentation. Acta Materialia, 71:283 – 292.
Sandlobes, S., Zaefferer, S., Schestakow, I., Yi, S., and Gonzalez-Martinez, R. (2011). On
the role of non-basal deformation mechanisms for the ductility of Mg and Mg-Y alloys.
Acta Materialia, 59(2):429 – 439.
Segurado, J., Lebensohn, R., LLorca, J., and Tome, C. (2012). Multiscale modeling of
plasticity based on embedding the viscoplastic self-consistent formulation in implicit
finite elements. International Journal of Plasticity, 28(1):124 – 140.
Segurado, J. and Llorca, J. (2002). A numerical approximation to the elastic proper-
ties of sphere-reinforced composites. Journal of the Mechanics and Physics of Solids,
50(10):2107 – 2121.
Segurado, J. and Llorca, J. (2013). Simulation of the deformation of polycrystalline nanos-
tructured Ti by computational homogenization. Computational Materials Science, 76:3
– 11.
Singh, A., Somekawa, H., and Mukai, T. (2007). Compressive strength and yield asym-
metry in extruded Mg-Zn-Ho alloys containing quasicrystal phase. Scripta Materialia,
56(11):935 – 938.
Sket, F., Enfedaque, A., Alton, C., Gonzalez, C., Molina-Aldareguia, J., and Llorca, J.
(2014). Automatic quantification of matrix cracking and fiber rotation by X-ray com-
puted tomography in shear-deformed carbon fiber-reinforced laminates. Composites Sci-
ence and Technology, 90:129 – 138.
Slutsky, L. J. and Garland, C. W. (1957). Elastic constants of magnesium from 4.2◦k to
300◦k. Phys. Rev., 107:972–976.
Song, Y., Shan, D., Chen, R., Zhang, F., and Han, E.-H. (2009). Biodegradable behaviors
of AZ31 magnesium alloy in simulated body fluid. Materials Science and Engineering:
C, 29(3):1039 – 1045.
111

Bibliography
Song, Y., Shan, D., and Han, E. (2008). Electrodeposition of hydroxyapatite coating on
AZ91D magnesium alloy for biomaterial application. Materials Letters, 62(17-18):3276
– 3279.
Souza, E., Peric, D., and Owens, D. (2008). Computational Methods for Plasticity: Theory
and Applications. Wiley.
Staiger, M. P., Pietak, A. M., Huadmai, J., and Dias, G. (2006). Magnesium and its alloys
as orthopedic biomaterials: A review. Biomaterials, 27(9):1728 – 1734.
Stanford, N. and Barnett, M. (2008). The origin of “rare earth” texture development
in extruded Mg-based alloys and its effect on tensile ductility. Materials Science and
Engineering: A, 496(1-2):399 – 408.
Stanford, N. and Barnett, M. (2013). Solute strengthening of prismatic slip, basal slip and
twinning in Mg and Mg�Zn binary alloys. International Journal of Plasticity, 47:165 –
181.
Stanford, N., Sabirov, I., Sha, G., La Fontaine, A., Ringer, S., and Barnett, M. (2010).
Effect of textscAl and gd solutes on the strain rate sensitivity of magnesium alloys.
Metallurgical and Materials Transactions A, 41(3):734–743.
Stanford, N., Sha, G., Xia, J., Ringer, S., and Barnett, M. (2011). Solute segregation and
texture modification in an extruded magnesium alloy containing gadolinium. Scripta
Materialia, 65(10):919 – 921.
Staroselsky, A. (1998). Crystal plasticity due to slip and twinning-Ph.D. Thesis. Mas-
sachusetts Institute of Technology.
Staroselsky, A. and Anand, L. (1998). Inelastic deformation of polycrystalline face centered
cubic materials by slip and twinning. Journal of the Mechanics and Physics of Solids,
46(4):671 – 696.
Taylor, G. (1938). Plastic strain in metals. Institute of metals, 62:307 – 324.
Tucker, J. C., Chan, L. H., Rohrer, G. S., Groeber, M. A., and Rollett, A. D. (2012). Com-
parison of grain size distributions in a Ni-based superalloy in three and two dimensions
using the Saltykov method. Scripta Materialia, 66(8):554 – 557.
112

Bibliography
Ulacia, I., Dudamell, N., Galvez, F., Yi, S., Perez-Prado, M., and Hurtado, I. (2010).
Mechanical behavior and microstructural evolution of a Mg AZ31 sheet at dynamic
strain rates. Acta Materialia, 58(8):2988 – 2998.
Vitek, V., Mrovec, M., and Bassani, J. (2004). Influence of non-glide stresses on plastic
flow: from atomistic to continuum modeling. Materials Science and Engineering: A,
365(1-2):31 – 37. Multiscale Materials Modelling.
Wang, H., Raeisinia, B., Wu, P., Agnew, S., and Tome, C. (2010). Evaluation of self-
consistent polycrystal plasticity models for magnesium alloy AZ31B sheet. International
Journal of Solids and Structures, 47(21):2905 – 2917.
Wang, S., Holm, E. A., Suni, J., Alvi, M. H., Kalu, P. N., and Rollett, A. D. (2011). Mod-
eling the recrystallized grain size in single phase materials. Acta Materialia, 59(10):3872
– 3882.
Yalcinkaya, T., Brekelmans, W. A. M., and Geers, M. G. D. (2008). BCC single crystal
plasticity modeling and its experimental identification. Modelling and Simulation in
Materials Science and Engineering, 16(8):085007.
Ye, J., Mishra, R. K., Sachdev, A. K., and Minor, A. M. (2011). In situ TEM compression
testing of Mg and Mg 0.2 wt 2%Ce single crystals. Scripta Materialia, 64(3):292 – 295.
Yi, S., Davies, C., Brokmeier, H., Bolmaro, R., Kainer, K., and Homeyer, J. (2006).
Deformation and texture evolution in AZ31 magnesium alloy during uniaxial loading.
Acta Materialia, 54(2):549 – 562.
Yoo, M. (1981). Slip, twinning, and fracture in hexagonal close-packed metals. Metallurgical
Transactions A, 12(3):409–418.
Yoo, M., Agnew, S., Morris, J., and Ho, K. (2001). Non-basal slip systems in HCP metals
and alloys: source mechanisms. Materials Science and Engineering: A, 319-321:87 – 92.
Yoshinaga, H., Obara, T., and Morozumi, S. (1973). Twinning deformation in magnesium
compressed along the C-axis. Materials Science and Engineering, 12(5-6):255 – 264.
Zhang, J. and Joshi, S. P. (2012). Phenomenological crystal plasticity modeling and de-
tailed micromechanical investigations of pure magnesium. Journal of the Mechanics and
Physics of Solids, 60(5):945 – 972.
113

Bibliography
Zhao, Z., Kuchnicki, S., Radovitzky, R., and no, A. C. (2007). Influence of in-grain mesh
resolution on the prediction of deformation textures in fcc polycrystals by crystal plas-
ticity FEM. Acta Materialia, 55(7):2361 – 2373.
Zhu, S. and Nie, J. (2004). Serrated flow and tensile properties of a Mg-Y-Nd alloy. Scripta
Materialia, 50(1):51 – 55.
114

List of Figures
1.1 Steering wheel of the US Toyota Camry (a), Faurecia’s front seat frame plat-
forms developed and produced for Nissan, General Motors and Volkswagen
(b), Boeing 737 thrust reverser (c), Toshiba Portege Z830� 104 with mag-
nesium alloy chassis (d), Bike with a frameset and wheels that are injection
metal molded in Mg (e) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 HCP crystallographic structure . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Plastic deformation modes in Mg . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Permanent deformation after by slip and twinning. . . . . . . . . . . . . . 7
1.5 EBSD image of Rh showing twins within the grains. [Kacher and Minor,
2014] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.6 Geometric configuration to determine the resolved shear stress τα on the slip
system characterized by the normal plane n and the slip direction s under
uniaxial loading σapplied. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.7 (Left) Typical pole figure of rolled Mg along ND direction. (Right) Section
A-A corresponding with the plane defined by RD-ND axes. [Zhang and
Joshi, 2012] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.8 (a) Orientation of the tensile axis with respect to the normal direction ND.
(b) Representative stress-strain curves of specimens tested at different angles
with respect to ND [Liu et al., 2011] . . . . . . . . . . . . . . . . . . . . . 11
1.9 Periodic microstructure and the corresponding RVE (a). Random polycrys-
tal microstructure and the corresponding RVE (taken from [Segurado and
Llorca, 2013]). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.10 Reference or undeformed configuration (B0) and current or deformed con-
figuration (B). Notation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
115
LIST OF FIGURES
1.11 Multiplicative decomposition of the total deformation gradient F into the
elastic, Fe, and plastic, Fp, components. . . . . . . . . . . . . . . . . . . . 15
1.12 Separation of scales between microscale and macroscale. . . . . . . . . . . . 17
1.13 VPSC assupmtion where the matrix-grain interaction is approximated by a
ellipsoidal grain (with its particular orientation) within a HEM . . . . . . . 18
1.14 Discretization of RVE of polycrystals. (a) Model with 1000 cubic voxels, in
which each one stands for a single crystal. (b) Model containing 100 crystals
discretized with 64000 voxels. (c) Model in which each crystal is represented
by a polyhedron obtained by means of a Voronoi tessellation. . . . . . . . . 22
1.15 Mg micropillar after compression in a direction at 45◦ from the basal plane
normal, showing slip along the basal plane. Courtesy of Yuan-Wei Edward
Chang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1 Multiplicative decomposition indicating material point subdivision in parent
and twin phases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 CRSS evolution by hardening . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3 Different reference systems used to characterize the planes in the hexagonal
lattice. Bravais (left) and orthogonal reference system (right) . . . . . . . . 33
2.4 Flow chart of the time discretization . . . . . . . . . . . . . . . . . . . . . 36
2.5 System reference rotation by Euler angles ϕ1, φ and ϕ2 . . . . . . . . . . . 39
2.6 Orientation of single crystal respect to a global system . . . . . . . . . . . 39
2.7 Rotation matrix corresponding with Rotations about axes z u and z′, see
Fig. 2.5. The letters c and s stand as the cosine and sine as well as the
sub-indices 1, 2 and 3 with the euler angles ϕ1, φ and ϕ2. . . . . . . . . . . 40
2.8 Different RVE of the polycrystal microstructure. (a)(b)(c)(d) Voxel repre-
sentation with 64, 216, 512 and 1000 cubic finite elements in which each
one stands for a grain respectively. (e)(f) Realistic RVE containing 584 and
300 crystals discretized with � 7 and 200 cubic finite elements per grain
respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.9 Flow chart of Levenberg-Marquardt optimization algorithm. . . . . . . . . 49
116

LIST OF FIGURES
3.1 Pole figures of the rolled AZ31 Mg alloy. (a) Experimental texture. (b)
Reduced equivalent initial texture with 512 orientations used as input to
create the RVE. The numbers in the legend stand for multiples of random
distribution. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2 Schematic of the loading directions for the mechanical tests of the rolled
plate of AZ31 Mg alloy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.3 Experimental true stress - true strain curves of the AZ31 Mg alloy along
different orientations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.4 Different RVE of the polycrystal microstructure for the optimization of the
AZ31 Mg alloy. (a) Voxel representation with 64 cubic finite elements in
which each one stands for a grain. (b) Voxel representation with 512 cubic
finite elements, one per grain. (c) Realistic RVE containing 512 crystals
discretized with � 7 cubic finite elements per grain. . . . . . . . . . . . . . 57
3.5 Evolution of the objective error function per point as a function of the
number of optimization iterations for different RVEs. . . . . . . . . . . . . 58
3.6 Results of the inverse optimization procedure using three stress-strain curves
(compression ND, tension ND and tension RD) as input. (a) Experimental
(solid lines) and numerical (broken lines with symbol) stress-strain curves
resulting from the optimization procedure. (b) Model prediction of the
tensile test in the RD-ND plane at 45◦ from both orientations. Solid lines
correspond to experimental results while broken lines with symbols stand
for the numerical simulations. The numerical results correspond to the RVE
with 512 crystals and � 7 elements per crystal. . . . . . . . . . . . . . . . 60
3.7 Relative contribution of each deformation mode to the plastic strain and
volume fraction of twinned material, f , as a function of the applied strain
in AZ31 Mg alloy. (a) Tension along ND. (b) Compression along ND. (c)
Tension along RD. (d) Tension along RD-ND plane at 45◦ from both orien-
tations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.8 Pole figures of the texture after 10% tensile strain along ND of the rolled
AZ31 Mg alloy. (a) Experimental results. (b) Computational homogeniza-
tion results obtained with the model with 512 orientations. The numbers in
the legend stand for multiples of random distribution. . . . . . . . . . . . . 64
117

LIST OF FIGURES
3.9 Results of the inverse optimization procedure using one stress-strain curves
(tension ND) as input. (a) Experimental (solid lines) and numerical (bro-
ken lines with symbol) stress-strain curves resulting from the optimization
procedure. (b) Model predictions of the compression test along ND and of
the tensile test along RD and in the RD-ND plane at 45◦ from both ori-
entations. Solid lines correspond to experimental results while broken lines
with symbols stand for the numerical simulations. The numerical results
correspond to the RVE with 512 crystals and � 7 elements per crystal. . . 66
3.10 Results of the inverse optimization procedure using two stress-strain curves
(tension along ND and RD) as input. (a) Experimental (solid lines) and
numerical (broken lines with symbol) stress-strain curves resulting from the
optimization procedure. (b) Model predictions of the compression test along
ND and of the tensile test in the RD-ND plane at 45◦ from both orientations.
Solid lines correspond to experimental results while broken lines with sym-
bols stand for the numerical simulations. The numerical results correspond
to the RVE with 512 crystals and � 7 elements per crystal. . . . . . . . . . 67
3.11 Optimized values of the initial CRSS (a), the saturation CRSS (b) and the
hardening modulus after the inverse analysis, for each of the deformation
modes. The input data used in the optimization process were the ND-T,
ND-C and RD-T curves. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.12 Microstructure in the as-extruded condition (as shown in an optical mi-
crograph) and inverse pole figure showing the orientation of the extrusion
direction. (a) MN10 Mg alloy. (b) MN11 Mg alloy . . . . . . . . . . . . . . 71
3.13 Experimental true stress-strain curves of the RE-containing Mg alloys at
ambient temperature. (a) MN10. (b) MN11. . . . . . . . . . . . . . . . . . 72
3.14 Cubic RVE of the microstructure including 300 crystals discretized with 200
cubic finite elements per grain . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.15 Experimental (solid lines) and simulated (broken lines) stress-strain curves
resulting from the optimization procedure in tension along ED, compression
along ED and compression at 90◦ from ED. (a) MN10 Mg alloy. (b) MN11
Mg alloy. (c) Experimental (solid lines) and predicted (broken lines) stress-
strain curves corresponding to both alloys tested in compression at 45◦ with
respect to ED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
118

LIST OF FIGURES
3.16 Experimental and simulated inverse pole figures showing the orientation of
the compression direction of the MN10 and MN11 Mg alloys after compres-
sion along ED. The numbers in the legend stand for multiples of random
distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.17 Optical micrographs showing the grain structure of the MN11 Mg alloy per-
pendicular to the ED. (a) As-extruded bar. (b) Grip section of the specimens
tested in tension along ED at -175◦C. (c) Idem at 50◦C, (d) Idem at 150◦C.
(e) Idem at 250◦C. (f) Idem at 300◦C. The average grain sizes are included
as insets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.18 Transmission electron microscopy micrographs of the grip section of the
specimens tested in tension at 10−3s−1 and different temperatures. (a) -
175◦C and (b-d) 250◦C. Micrographs are perpendicular to the ED. . . . . . 81
3.19 Inverse pole figures illustrating the orientation of the ED. (a) As-extruded
bar. (b) Grip section of the specimens tested in tension along ED at -175◦C.
(c) Idem at 50◦C. (d) Idem at 150◦C. (e) Idem at -250◦C. (f) Idem at -300◦C.
The numbers in the legend stand for multiples of random distribution. . . . 82
3.20 Experimental true stress-strain curves of the MN11 Mg alloy at different
temperatures. (a) Compression along ED. (b) Tension along ED. . . . . . . 83
3.21 Evolution of the yield stress in tension and compression along the ED with
temperature for the MN11 Mg alloy. . . . . . . . . . . . . . . . . . . . . . 84
3.22 Electron backscatter diffraction inverse pole figure maps in the ED of spec-
imens compressed up to 5% engineering strain at 10−3s−1 at different tem-
peratures. (a) 50◦C and (b) 250◦C. The non-indexed points are shown as
black pixels. The boundaries having a misorientation of 86◦ (� 5◦) have
been depicted as white lines. The compression axis is horizontal. . . . . . . 86
3.23 Inverse pole figures obtained by X-ray diffraction showing the orientation of
the ED in specimens deformed under different conditions. (a) 50◦C under
compression up to 30% engineering strain. (b) 50◦C under tension up to
failure. (c) 250◦C under compression up to 40% engineering strain. (d)
250◦C under tension up to failure. The numbers in the legend indicate
multiples of random distribution. . . . . . . . . . . . . . . . . . . . . . . . 87
119
LIST OF FIGURES
3.24 Experimental (solid lines) and simulated (broken lines) stress-strain curves
in tension and compression along ED in MN11 Mg alloy at different tem-
peratures.(a) -175◦C. (b) 50◦C. (c) 150◦C. (d) 250◦C, (e) 300◦C. . . . . . . 92
3.25 Evolution of the initial CRSS, τ0,c, with temperature for each slip mode and
twinning of MN11 Mg alloy according to the inverse optimization model. . 93
3.26 Relative contribution of each deformation mode to the plastic strain as a
function of temperature and loading (tension or compression along the ED)
in MN11 Mg alloy. (a) -175◦C, tension. (b) -175◦C, compression. (c) -50◦C,
tension. (d) 50◦C, compression. (e) 250◦C, tension. (f) 250◦C, compression. 94
120
List of Tables
1.1 Elastic constants (in GPa) of Mg single crystal at 300K [Slutsky and Gar-
land, 1957]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Values of the initial CRSS for different slips modes and tensile twinning in
AZ31 Mg alloy predicted by fitting experimental results on polycrystals with
simulations based on mean-field methods or computational homogenization. 25
2.1 Deformation systems considered. Plane normals n and slip directions s are
expressed both in the Bravais coordinated system (a1, a2, a3, c) (sub-index
brav) and in the orthogonal system (e1, e2 and e3) (sub-index ort) . . . . . . 34
2.2 Internal variables (STATEV) saved at each point of convergence and for
each Gauss point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.1 Chemical composition of the AZ31 alloy in wt.%. . . . . . . . . . . . . . . 51
3.2 Average values of the maximum Schmid factors for different deformation
modes in the polycrystalline AZ31 Mg alloy. . . . . . . . . . . . . . . . . . 55
3.3 Optimum values of the parameters that define the mechanical behavior of
each slip mode and extension twinning in the AZ31 Mg alloy as a function
of the RVE used in the optimization process. Magnitudes are expressed in
MPa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.4 Optimum values of the parameters that define the mechanical behavior of
each slip mode and extension twinning in the AZ31 Mg alloy as a func-
tion of the input stress-strain curves used in the optimization procedure.
Magnitudes are expressed in MPa. . . . . . . . . . . . . . . . . . . . . . . . 65
3.5 Chemical composition of MN10 and MN11 Mg alloys (in wt.%). . . . . . . 70
121

LIST OF TABLES
3.6 Comparison of the initial CRSSs (τ0,c) obtained by inverse optimization for
the MN10 and MN11 alloys with those measured in pure Mg single crystals
[Zhang and Joshi, 2012] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.7 Optimum values of the parameters that define the mechanical behavior of
each slip mode and extension twinning in MN11 Mg alloy as a function of
temperature. Magnitudes are expressed in MPa. . . . . . . . . . . . . . . . 91
122
Appendix BPersonal contributions
Papers in journals
� Vicente Herrera Solaz; Fco. Javier Llorca Martinez; Ebubekir Dogan; Ibrahim Kara-
man; Javier Segurado Escudero. “An inverse optimization strategy to determine
single crystal mechanical behavior from polycrystal tests: Application to AZ31 Mg
alloy”. International Journal of Plasticity. 57, pp. 1�15. 02/2014. ISSN 0749�6419.
Impact factor= 4.35
� Vicente Herrera Solaz; Paloma Hidalgo Manrique; Maria Teresa Perez Prado; Diet-
mar Letzig; Fco. Javier Llorca Martinez; Javier Segurado Escudero. “Effect of rare
earth additions on the critical resolved shear stresses of magnesium alloys”. Materials
Letters. 128, pp. 199� 203. 04/2014. ISSN 0167� 577X. Impact factor= 2.22
� Vicente Herrera Solaz; Fco. Javier Llorca Martinez; Javier Segurado Escudero. De-
terminacion de propiedades de monocristales a partir de ensayos mecanicos en poli-
cristales: Aplicacion a aleaciones de Magnesio. Anales de Mecanica de la fractura.
04/2014.
� Paloma Hidalgo Manrique; Vicente Herrera Solaz; Javier Segurado Escudero; Fco.
Javier Llorca Martinez; Francisco Galvez Diaz-Rubio; O.A. Ruano; Maria Teresa
Perez Prado. “Origin of the reversed yield asymmetry in Mg-rare earth alloys at high
temperature”. Paper submitted for publication to Acta Materialia. ISSN 1359�6454.
Impact factor= 3.9
123

Appendix B. Personal contributions
� Vicente Herrera Solaz; Javier Segurado Escudero; Fco. Javier Llorca Martinez.“On
the robustness of an inverse optimization approach based on Levenberg-Marquardt
method for the mechanical behavior of polycrystals”. Paper submitted for publica-
tion.
Congresses
� Stochastic and multiscale inverse problems. “An inverse optimization strategy to
determine single crystal mechanical behavior from polycrystal tests: application to
Mg alloys”. 02/10/2014. Paris-FRANCE.
� 24th International Workshop on Computational Micromechanics of Materials (IWCMM24).
“Effect of Temperature on the critical resolved shear stresses of MN11 Magnesium
alloy”. 01/10/2014. Getafe (Madrid)-SPAIN.
� 17th U.S. National Congress on Theoretical and Applied Mechanics. “An inverse
optimization strategy to determine single crystal mechanical behavior from polycrys-
tal tests: application to Mg alloys”. 15/06/2014. Michigan State University, East
Lansing (MI)-USA.
� 3rd International Workshop on Physics Based Material Models and Experimental
Observations. “An inverse optimization strategy to determine single crystal mechan-
ical behavior from polycrystal tests: application to Mg alloys (Poster)”. 02/06/2014.
Cesme/Izmir-TURKEY
� XXXI Encuentro del grupo espanol de fractura. “Determinacion de propiedades de
monocristales a partir de ensayos mecanicos en policristales: Aplicacion a aleaciones
de Magnesio”. 02/04/2014. San Lorenzo del Escorial (Madrid)-SPAIN.
� Magnesium Workshop. “An International Workshop on Processing-Microstructure-
Mechanical Property of Magnesium Alloys”. Crystal Plasticity Modeling of Magne-
sium Alloys. 21/05/2013. Getafe (Madrid)-SPAIN.
Stays abroad
� Michigan State University, East Lansing (MI)-USA. From 1/08/2013 to 31/10/2013.
124









![Di raction Line Imaging€¦ · 26], and rainbow particle velocimetry [35].Unlike prior works, our method uses di raction to encode the spatial position of scene light sources. In](https://static.fdocuments.net/doc/165x107/606681c00478de56b87ec1cd/di-raction-line-imaging-26-and-rainbow-particle-velocimetry-35unlike-prior.jpg)







