
Microsoft Robotics Studio Runtime, Simulation & VPL.
81
Microsoft Robotics Studio Microsoft Robotics Studio Runtime, Simulation & VPL Runtime, Simulation & VPL
-
Upload
norman-giles-hawkins -
Category
Documents
-
view
225 -
download
4
Transcript of Microsoft Robotics Studio Runtime, Simulation & VPL.

Microsoft Robotics StudioMicrosoft Robotics Studio
Runtime, Simulation & VPLRuntime, Simulation & VPL

Microsoft Robotics StudioMicrosoft Robotics StudioRuntime, Simulation & VPL Runtime, Simulation & VPL OverviewOverview
Zeddy IskandarZeddy IskandarAcademic DeveloperAcademic DeveloperMicrosoft IndonesiaMicrosoft Indonesia

Presentation OutlinePresentation Outline
Microsoft Robotics Studio RuntimeMicrosoft Robotics Studio RuntimeOverview, Components and ConceptsOverview, Components and Concepts
Decentralized Software Services (DSS)Decentralized Software Services (DSS)A lightweight, service oriented application A lightweight, service oriented application model based around state manipulationmodel based around state manipulation
Concurrency and Coordination Runtime Concurrency and Coordination Runtime (CCR) (CCR)
A message based model enabling fine A message based model enabling fine grained concurrency and coordination grained concurrency and coordination without resorting to threads, locks while without resorting to threads, locks while avoiding traditional asynchronous avoiding traditional asynchronous programming pitfallsprogramming pitfalls

Highly Diverse Market…Highly Diverse Market…

Shared Challenges… Shared Challenges… Input from industry, hobbyists, academia, research, Input from industry, hobbyists, academia, research, ……
Configuring sensors and actuators in running Configuring sensors and actuators in running systemsystem
Coordinating sensors and actuators Coordinating sensors and actuators asynchronouslyasynchronously
Starting and stopping components dynamicallyStarting and stopping components dynamically
Monitoring/Interacting/Debugging running Monitoring/Interacting/Debugging running systemsystem
Development when access to robot is limited Development when access to robot is limited
Span multiple compute unitsSpan multiple compute units
Re-use of components across hardware Re-use of components across hardware platforms and devicesplatforms and devices

Overall Runtime GoalsOverall Runtime Goals
Distributed Application Model (DSS)Distributed Application Model (DSS)Simple, flexible, and service orientedSimple, flexible, and service oriented
Coarse grained and loosely coupledCoarse grained and loosely coupled
Compatible with existing Web Compatible with existing Web infrastructureinfrastructure
Concurrent Programming Model Concurrent Programming Model (CCR)(CCR)
Focus on coordination of messagesFocus on coordination of messages
Hide traditional threads and locks Hide traditional threads and locks primitivesprimitives
Enable non thread blocking sequential Enable non thread blocking sequential execution between I/O, avoiding execution between I/O, avoiding nesting/callback chainsnesting/callback chains

DSS Application ModelDSS Application Model
The definition of a Robotics The definition of a Robotics applicationapplication

What is a Robotics What is a Robotics Application?Application?
An application is a An application is a compositioncomposition of loosely- of loosely-coupled components concurrently coupled components concurrently executingexecuting
Orchestration of sensors/actuatorsOrchestration of sensors/actuators
User interfaceUser interface
Controlled/Autonomous behaviorControlled/Autonomous behavior
A service is the unit of orchestrationA service is the unit of orchestration
MotorBumper 1(Sensor)
Orchestrator
MotorBumper 2(Sensor)
Infrared detector(Sensor)
Message Box
(Actuator)

Service PropertiesService PropertiesIdentityIdentityStructured StateStructured StateComposition through Composition through partneringpartnering
Uniform BehaviorUniform BehaviorState retrieval and State retrieval and manipulation manipulation Service creation & Service creation & TerminationTerminationEvent notificationsEvent notifications
Anatomy of a ServiceAnatomy of a Service
Port
State
Handlers
Service
FIFO

Service AbstractionService Abstraction
Services can represent any Services can represent any computationcomputation
Hardware: Sensors, actuators,…Hardware: Sensors, actuators,…
Software: UI, Storage,…Software: UI, Storage,…
Aggregation: Sensor fusion, mash-ups,…Aggregation: Sensor fusion, mash-ups,…
Reuse through compositionReuse through compositionSeparate State from Behavior (don’t hide Separate State from Behavior (don’t hide state!)state!)

Sample Bumper ServiceSample Bumper Service
Structured StateStructured State
Non-structured state handled out of Non-structured state handled out of bandband
Uniform OperationsUniform OperationsDefine operations over the stateDefine operations over the state
GET, QUERY, UPDATE, DELETE, DROP, GET, QUERY, UPDATE, DELETE, DROP, SUBSCRIBESUBSCRIBE

Sample Partner Sample Partner RelationshipRelationship
Orchestrator Service subscribes to Orchestrator Service subscribes to bumper Service waiting for sensor bumper Service waiting for sensor inputinput
A service can partner with arbitrary A service can partner with arbitrary number of other servicesnumber of other services
MotorBumper 1(Sensor)
Orchestrator
MotorBumper 2(Sensor)
Infrared detector(Sensor)
Message Box
(Actuator)

Service InteractionsService Interactions
Runtime, Hosting Environment, and Runtime, Hosting Environment, and System ServicesSystem Services

Service InteractionService Interaction
Service Interaction happens through Service Interaction happens through protocolsprotocols
HTTP is available for interactions HTTP is available for interactions from Web browser and for providing from Web browser and for providing UIUI
Enables deep integration with existing Enables deep integration with existing Web infrastructureWeb infrastructure
DSSP is a SOAP-based protocol DSSP is a SOAP-based protocol available for inter-service available for inter-service communicationcommunication
Augments HTTP model with structured Augments HTTP model with structured data manipulation and event data manipulation and event notificationsnotifications

Distributed ApplicationsDistributed Applications
Services can run Services can run directly on a directly on a single robotsingle robotServices can run Services can run on swarms of on swarms of collaborating collaborating robotsrobotsServices can run Services can run on computers in on computers in the networkthe networkApplications Applications typically a mixtypically a mix

Runtime PerformanceRuntime Performance
Service-to-Service message Service-to-Service message throughput:throughput:
Same process (with full cloning): 50,000 Same process (with full cloning): 50,000 msgs/secondmsgs/second
Cross node,cross machine: 3,000 Cross node,cross machine: 3,000 msgs/secmsgs/sec
Numbers from dual core 1.8GHz, 2GB Numbers from dual core 1.8GHz, 2GB RAMRAM
Performance allows consistent use of Performance allows consistent use of service model for both local and service model for both local and distributed casedistributed case

CCR ProgrammingCCR Programming
The foundation for writing Robotics The foundation for writing Robotics ApplicationsApplications

The CCR RuntimeThe CCR Runtime
Asynchronous Programming modelAsynchronous Programming modelA concurrency model without manual A concurrency model without manual threading, locks, semaphores, etc.threading, locks, semaphores, etc.
Based on asynchronous message passingBased on asynchronous message passing
Focus on coordination primitivesFocus on coordination primitives
Sequential execution but with no thread Sequential execution but with no thread blocking, with no need for callbacks, when blocking, with no need for callbacks, when necessarynecessary
Execution context for servicesExecution context for servicesIsolation from infrastructureIsolation from infrastructure
Isolation from other servicesIsolation from other services

Messages, Ports, and Messages, Ports, and ArbitersArbiters
Messages are sent to PortsMessages are sent to PortsPort<int> myPort = new Port<int>() ;Port<int> myPort = new Port<int>() ;myPort.Post (42) ;myPort.Post (42) ;
Ports containPorts containA FIFO data-structure holding values in a portA FIFO data-structure holding values in a portA list of continuations that can be executed A list of continuations that can be executed pending message arrival and arbitrationpending message arrival and arbitration
A continuation is represented by a C# delegateA continuation is represented by a C# delegateCan either be named or anonymousCan either be named or anonymous
ArbitersArbitersImplement common concurrency constructs Implement common concurrency constructs like join patterns and interleaved calculationslike join patterns and interleaved calculations

Example: Iterators make a Example: Iterators make a differencedifference
IEnumerator<ITask> MultistageIterator()IEnumerator<ITask> MultistageIterator()
{{
bool result = false;bool result = false;
Port<bool> port = new Port<bool>();Port<bool> port = new Port<bool>();
// Stage A, send request// Stage A, send request
port.Post(true);port.Post(true);
yield return yield return Arbiter.Receive(false, port, delegate(bool b) Arbiter.Receive(false, port, delegate(bool b) {result=b; });{result=b; });
// Stage B, received first result, send second request// Stage B, received first result, send second request
port.Post(result);port.Post(result);
yield return yield return Arbiter.Receive(false, port, delegate(bool b) Arbiter.Receive(false, port, delegate(bool b) {result=b; });{result=b; });
// Stage C, received second result, print it// Stage C, received second result, print it
Console.WriteLine(result);Console.WriteLine(result);
}}

Example: ChoiceExample: ChoicePortSet<int, string> port = new PortSet<int, string>();PortSet<int, string> port = new PortSet<int, string>();
Activate(Activate(Arbiter.Choice(port, MyIntHandler, MyStringHandler)Arbiter.Choice(port, MyIntHandler, MyStringHandler)
););
void MyIntHandler(int i)void MyIntHandler(int i){{ Console.WriteLine("Received: " + i);Console.WriteLine("Received: " + i);}}
void MyStringHandler(string s)void MyStringHandler(string s){{ Console.WriteLine("Received: " + s);Console.WriteLine("Received: " + s);}}

Example: Dynamic JoinExample: Dynamic JoinPortSet<Result,Exception> resultsPort = PortSet<Result,Exception> resultsPort = new PortSet<int>();new PortSet<int>();
// parallel computation by posting requests// parallel computation by posting requestsFor (int i=0;i<N;i++)For (int i=0;i<N;i++){{ computePort.Post(new DoWork(someData,resultsPort));computePort.Post(new DoWork(someData,resultsPort));}}
// requests complete asynchronously with unknown number// requests complete asynchronously with unknown number// of failures vs. successes// of failures vs. successesActivate(Activate(
Arbiter.MultipleItemReceive(resultsPort,Arbiter.MultipleItemReceive(resultsPort, delegate (ICollection<Result> successes, delegate (ICollection<Result> successes, ICollection<Exception> failures)ICollection<Exception> failures){{ foreach(Result r in results) foreach(Result r in results) {{ …… …… }}});});

[ServiceHandler(ServiceHandlerBehavior.[ServiceHandler(ServiceHandlerBehavior.ConcurrentConcurrent)] )] public IEnumerator<ITask> GetHandler(Get get) public IEnumerator<ITask> GetHandler(Get get) { { get.ResponsePort.Post(_state);get.ResponsePort.Post(_state); yield break; yield break; }}
[ServiceHandler(ServiceHandlerBehavior.[ServiceHandler(ServiceHandlerBehavior.ExclusiveExclusive)] )] public IEnumerator<ITask> UpdateHandler(Update update) public IEnumerator<ITask> UpdateHandler(Update update) { { _state.CurrentResult += update.Body.Value; _state.CurrentResult += update.Body.Value; update.ResponsePort.Post(new UpdateResponse()); update.ResponsePort.Post(new UpdateResponse()); yield break; yield break; }}
Declarative Coordination for Declarative Coordination for ServicesServices

SimulationSimulation
Because hardware is expensive Because hardware is expensive

Why a Simulator?Why a Simulator?
Robotics hardware Robotics hardware is expensiveis expensive
Hardware can be Hardware can be difficult to debugdifficult to debug
Hard for a team to Hard for a team to work concurrently work concurrently with limited with limited hardwarehardware

Why a Simulator?Why a Simulator?BenefitsBenefits
Low barrier to Low barrier to entryentry
Staged approachStaged approach
Easy prototypingEasy prototyping
Useful for Useful for educationeducation
Good learning and Good learning and research toolresearch tool

Why a Simulator?Why a Simulator?LimitationsLimitations
Lack of noisy dataLack of noisy data
Incomplete or Incomplete or inaccurate modelsinaccurate models
Accurate tuning Accurate tuning takes timetakes time

Simulator ArchitectureSimulator ArchitectureThe Simulator Engine ServiceThe Simulator Engine Service
Implemented as a Implemented as a serviceservice
Maintains world stateMaintains world state
Manages input devicesManages input devices
3D rendering using 3D rendering using XNAXNA
Ageia Physics Ageia Physics SimulationSimulation
Graphical User Graphical User InterfaceInterface
Editor for modeling Editor for modeling and debuggingand debugging
SimulationEngineService
XNAGraphicsLibrary
Display Hardware
AgeiaPhysicsEngine
User Interface / Editor

Visual Programming Visual Programming LanguageLanguage
Rapid Robot PrototypingRapid Robot Prototyping

MicrosoftMicrosoftVisual Programming LanguageVisual Programming Language
Visual programming environmentVisual programming environment
Simple programming with drag and Simple programming with drag and dropdrop
Application are diagramsApplication are diagramsBlocksBlocks
ConnectionsConnections
Integrated into Microsoft Robotics Integrated into Microsoft Robotics StudioStudio

Guided TourGuided Tour

Hello, World!Hello, World!

How does it work?How does it work?
Exchange of messages between Exchange of messages between activitiesactivities
ActivitiesActivitiesPerform an action on input messagePerform an action on input message
Send result of the action as output Send result of the action as output messagemessage
ConnectionsConnectionsMake output of one activity input of Make output of one activity input of secondsecond
Input message
Output message

How does it work?How does it work?
Exchange of messages between Exchange of messages between activitiesactivities
ActivitiesActivitiesPerform an action on input messagePerform an action on input message
Send result of the action as output Send result of the action as output messagemessage
ConnectionsConnectionsMake output of one activity input of Make output of one activity input of secondsecond
Input message

Data ActivityData Activity
Output message is a new data valueOutput message is a new data value
Ignores content of input messageIgnores content of input message
Different types of dataDifferent types of dataint, string, double, bool, …int, string, double, bool, …

Service ActivitiesService Activities
SimpleDialog is a DSS ServiceSimpleDialog is a DSS Service
All DSS services are activities in VPLAll DSS services are activities in VPLProvide access robot hardware, input Provide access robot hardware, input devices, behavior …devices, behavior …
You can add your own activities!You can add your own activities!

Service ActivitiesService Activities
Services can have multiple actions, Services can have multiple actions, e.g.e.g.
AlertDialog, PromptDialog, AlertDialog, PromptDialog, ConfirmDialogConfirmDialog
Most actions have two output Most actions have two output messagesmessages
Success – may contain output valuesSuccess – may contain output values
Fault – action could not completeFault – action could not complete

Selecting ServicesSelecting Services
Services appear in Services appear in the the ServicesServices toolboxtoolbox
Use the search box Use the search box to quickly find to quickly find services.services.

Making ConnectionsMaking Connections
Drag output message of first activity Drag output message of first activity ……

Making ConnectionsMaking Connections
… … to second activityto second activity
Possible targets are highlightedPossible targets are highlighted

Selecting ActionsSelecting Actions
When connecting an activity with When connecting an activity with multiple actions, select the desired multiple actions, select the desired action.action.
Selects the action to which to send the message.
Selects the output message that is used as input message for the action.

Data ConnectionsData Connections
Service actions define format Service actions define format required for input messagerequired for input message
Data Connections format messagesData Connections format messages
AlertDialog requires an input value called AlertText.
Selects the part of the input message that is used for the target.

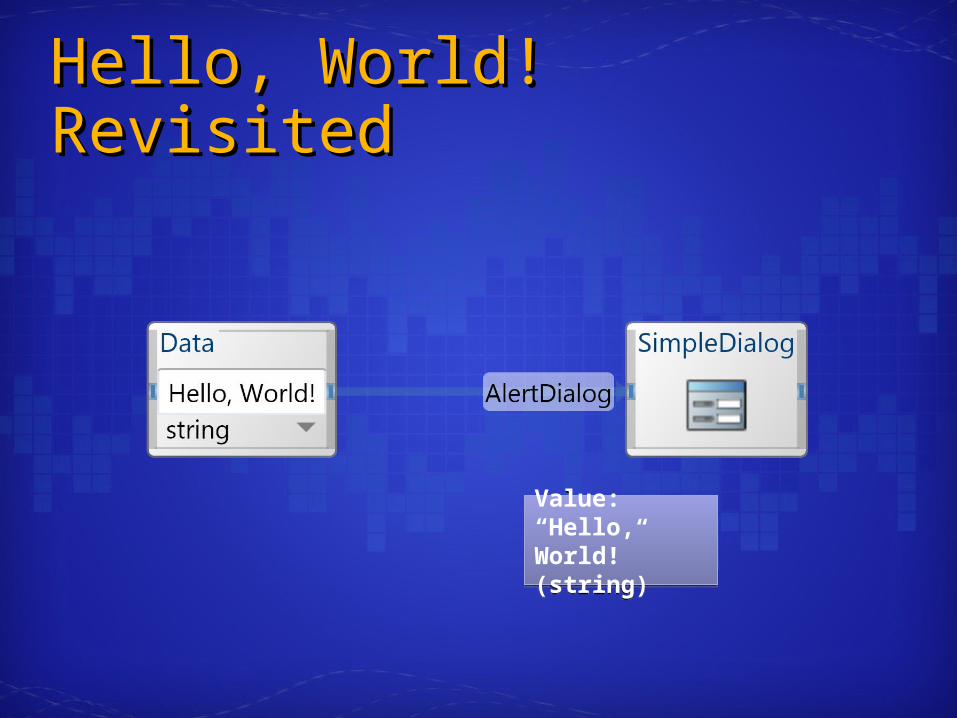
Hello, World! RevisitedHello, World! Revisited

Hello, World! RevisitedHello, World! Revisited
Not connected. Automatically receives an empty input message.
Value:Value:

Hello, World! RevisitedHello, World! Revisited
Value:“Hello, World!”(string)
Value:“Hello, World!”(string)
Hello, World! RevisitedHello, World! Revisited
Value:“Hello, World!”(string)
Value:“Hello, World!”(string)

Hello, World! RevisitedHello, World! RevisitedData connections formats the input message before it is sent to the activity
Value:AlertText = “Hello, World!”(AlertText string)
Value:AlertText = “Hello, World!”(AlertText string)

Hello, World! RevisitedHello, World! Revisited
Not connected. Output message is ignored.
Value:Empty(Success)
Value:Empty(Success)

Example 1Example 1
Create a new activity that translates Create a new activity that translates the thumb-stick value of the XBox360 the thumb-stick value of the XBox360 controller to left and right power controller to left and right power values of a differential drive.values of a differential drive.
User defined activitiesUser defined activities

XBox360 ControllerXBox360 Controller
ThumbsticksChangThumbsticksChangee notification notification
X, Y coordinates X, Y coordinates for both thumb-for both thumb-sticks:sticks:
LeftX, LeftY LeftX, LeftY
RightX, RightY RightX, RightY
floatfloat
XX
YY
1.01.0-1.0-1.0
-1.0-1.0
1.01.0

Generic Differential DriveGeneric Differential Drive
Very simple drive systemVery simple drive systemControlled by applying different power to Controlled by applying different power to left and right motorleft and right motor
SetDrivePowerSetDrivePower Action ActionLeftWheelPower, RightWheelPower:LeftWheelPower, RightWheelPower:values between -1.0 and 1.0 (double)values between -1.0 and 1.0 (double)

Conversion ActivityConversion Activity
??

User ActivitiesUser Activities
Similar to service activitiesSimilar to service activities
Multiple actionsMultiple actions
Can send notificationsCan send notifications
Have their own stateHave their own state

Implementing ActionsImplementing ActionsInside an ActivityInside an Activity

Implementing ActionsImplementing ActionsInside an ActivityInside an Activity
Double-click opens the activity and shows its implementation.

Implementing ActionsImplementing ActionsInside an ActivityInside an Activity

Selects the current action that is shown.
Implementing ActionsImplementing ActionsInside an ActivityInside an Activity

Implementing ActionsImplementing ActionsInside an ActivityInside an Activity
Input message of the action.
Output message of the action.

Implementing ActionsImplementing ActionsInside an ActivityInside an Activity
Input message of the action.
Output message of the action.

Implementing ActionsImplementing ActionsAction PropertiesAction Properties
Input message of the action.
Output message of the action.

Implementing ActionsImplementing ActionsAction PropertiesAction Properties
Shows more properties of the action and allows to add and delete actions.

Shows more properties of the action and allows to add and delete actions.
List of actions in the activity.
Implementing ActionsImplementing ActionsAction PropertiesAction Properties

Implementing ActionsImplementing ActionsAction PropertiesAction Properties
Change name and description to something useful.

Implementing ActionsImplementing ActionsAction PropertiesAction Properties
Add input values for the thumb-stick coordinates.

Implementing ActionsImplementing ActionsAction PropertiesAction Properties
Add output values for the left and right drive power.

Implementing ActionsImplementing ActionsConnecting the Input MessageConnecting the Input Message
Use the input message like any other message.

Implementing ActionsImplementing ActionsConnecting the Input MessageConnecting the Input Message
Input values become part of the message.

Implementing ActionsImplementing ActionsConnecting the Input MessageConnecting the Input Message

Implementing ActionsImplementing ActionsCreating the Output MessageCreating the Output Message
Must put two message into one message.
Must put two messages into one message.

Implementing ActionsImplementing ActionsCreating the Output MessageCreating the Output Message
Join combines two or more messages.

Implementing ActionsImplementing ActionsCreating the Output MessageCreating the Output Message
Value:0.3251(float)
Value:0.3251(float)
Value:-0.73(float)
Value:-0.73(float)

Implementing ActionsImplementing ActionsCreating the Output MessageCreating the Output Message
Value:Left = 0.3251Right = -0.73(Left float, Right Float)
Value:Left = 0.3251Right = -0.73(Left float, Right Float)
Join only creates the output message if there are two input messages.

Implementing ActionsImplementing ActionsSending the Output MessageSending the Output Message
Connect the result message to the right border.

Implementing ActionsImplementing ActionsSending the Output MessageSending the Output Message

Implementing ActionsImplementing ActionsSending the Output MessageSending the Output Message

Conversion ActivityConversion Activity
??

Using your ActivityUsing your Activity

Control Robot with Control Robot with WiimoteWiimote

Control Robot with Control Robot with SpeechSpeech

Additional ResourcesAdditional Resources
Web siteWeb sitehttp://www.microsoft.com/robotics
Community NewsgroupCommunity Newsgrouphttp://msdn.microsoft.com/robotics/
Princeton MSRS PagePrinceton MSRS Pagehttp://pave.princeton.edu/main/urban-challenge/msrs/

© 2006 Microsoft Corporation. All rights reserved. Microsoft, Windows, Windows Vista and other product names are or may be registered trademarks and/or trademarks in the U.S. and/or other countries.The information herein is for informational purposes only and represents the current view of Microsoft Corporation as of the date of this presentation. Because Microsoft must respond to changing market conditions,
it should not be interpreted to be a commitment on the part of Microsoft, and Microsoft cannot guarantee the accuracy of any information provided after the date of this presentation. MICROSOFT MAKES NO WARRANTIES, EXPRESS, IMPLIED OR STATUTORY, AS TO THE INFORMATION IN THIS PRESENTATION.


















