Microprocessor Part2

of 84
Transcript of Microprocessor Part2
-
8/17/2019 Microprocessor Part2
1/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 1 of 14
INTRODUCTION TO MICROCONTROLLERE
What i s a Microcontro ller?• A microcontroller (sometimes abbreviated µC, uC or MCU ) is a small computer
on a single integrated circuit containing a processor core, memory, and
programmable input/output peripherals.
•
Microcontrollers are designed for embedded applications, in contrast to themicroprocessors used in personal computers or other general purpose
applications. Microcontrollers may be:
Embedded’ inside some other device (often a consumer product) so
that they can control the features or actions of the product. Another
name for a microcontroller is therefore an ‘embedded controller’.
Dedicated to one task and run one speci c program. The program is
stored in ROM and generally does not change.
A low-power device. A battery-operated microcontroller might consume
as littleas50 milliwatts.
• A Microcontroller may take an input from the device it is controlling and controls
the device by sending signals to deferent components in the device.
• A microcontroller is often small and low cost. The components may be chosen tominimize size and to be as in expensive as possible.
• The actual processor used to implement a microcontroller can vary widely. In many
products, such as microwave ovens, the demand on the CPU is fairly low and price is an
important consideration. In these cases, manufacturers turn to dedicated microcontroller
chips – devices that were originally designed to be low-cost, small, low-power,
embedded CPUs. The Motorola 6811 and Intel 8051 are both good examples of such
chips.
http://en.wikipedia.org/wiki/Integrated_circuithttp://en.wikipedia.org/wiki/Input/outputhttp://en.wikipedia.org/wiki/Microprocessorhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Personal_computerhttp://en.wikipedia.org/wiki/Microprocessorhttp://en.wikipedia.org/wiki/Input/outputhttp://en.wikipedia.org/wiki/Integrated_circuit
-
8/17/2019 Microprocessor Part2
2/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 2 of 14
Development/Classification of microcontrollers
Microcontrollers have gone through a silent evolution (invisible). The
evolution can be rightly termed as silent as the impact or application of a
microcontroller is not well known to a common user, although microcontroller
technology has undergone significant change since early 1970's. Development
of some popular microcontrollers is given as follows.
Intel 4004 4 bit (2300 PMOS trans, 108 kHz) 1971
Intel 8048 8 bit 1976
Intel 8031 8 bit (ROM-less) .
Intel 8051 8 bit (Mask ROM) 1980
Microchip PIC16C64 8 bit 1985
Motorola 68HC11 8 bit (on chip ADC) .
Intel 80C196 16 bit 1982
Atmel AT89C51 8 bit (Flash memory) .
Microchip PIC 16F877 8 bit (Flash memory + ADC) .
Microcontrollers Vs Microprocessors
1. A microprocessor requires an external memory for program/data storage.Instruction execution requires movement of data from the external memory to
the microprocessor or vice versa. Usually, microprocessors have good
computing power and they have higher clock speed to facilitate faster
computation.
2. A microcontroller has required on-chip memory with associated peripherals. A
microcontroller can be thought of a microprocessor with inbuilt peripherals.
-
8/17/2019 Microprocessor Part2
3/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 3 of 14
3. A microcontroller does not require much additional interfacing ICs for
operation and it functions as a stand alone system. The operation of a
microcontroller is multipurpose, just like a Swiss knife.
4. Microcontrollers are also called embedded controllers. A microcontroller clock
speed is limited only to a few tens of MHz. Microcontrollers are numerous and
many of them are application specific.
Choosing a Microcontroller
Three criteria in Choosing a Microcontroller
meeting the computing needs of the task efficiently and cost effectively
speed, the amount of ROM and RAM, the number of I/O ports and
timers, size, packaging, power consumption
easy to upgrade
cost per unit
availability of software development tools
assemblers, debuggers, C compilers, emulator, simulator, technical
support
wide availability and reliable sources of the microcontrollers
-
8/17/2019 Microprocessor Part2
4/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 4 of 14
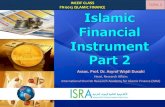
Internal Structure of a Microcontroller
F i g
. 1 :
M i c r o c o n
t r o
l l e r
A r c h
i t e c
t u r e
b l o c
k d i a g r a m
-
8/17/2019 Microprocessor Part2
5/84
-
8/17/2019 Microprocessor Part2
6/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 6 of 14
calibration values, codes, values to count up to etc.), which must be saved after
turning the power supply off. A disadvantage of this memory is that the process of
programming is relatively slow. It is measured in miliseconds.
Special Function Registers (SFR)
Special function registers are part of RAM memory. Their purpose is
predefined by the manufacturer and cannot be changed therefore. Since their bits
are physically connected to particular circuits within the microcontroller, such as A/D
converter, serial communication module etc., any change of their state directly
affects the operation of the microcontroller or some of the circuits. For example,
writing zero or one to the SFR controlling an input/output port causes the appropriate
port pin to be configured as input or output. In other words, each bit of this register
controls the function of one single pin.
-
8/17/2019 Microprocessor Part2
7/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 7 of 14
Program Counter
Program Counter is an engine running the program and points to the memory
address containing the next instruction to execute. After each instruction execution,
the value of the counter is incremented by 1. For this reason, the program executes
only one instruction at a time just as it is written. However…the value of the program
counter can be changed at any moment, which causes a “jump” to a new memory
location. This is how subroutines and branch instructions are executed. After
jumping, the counter resumes even and monotonous automatic counting +1, +1,+1…
A regi st er or a memory cell is an electronic circuit which can memorize the state of
one byte. Besides 8 bits available to the user, each register has also a number of
addressing bits. It is important to remember that:
• All registers of ROM as well as those of RAM referred to as general-purpose
registers are mutually equal and nameless. During programming, each of
them can be assigned a name, which makes the whole operation much
easier.
• All SFRs are assigned names which are different for different types of the
microcontrollers and each of them has a special function as their name
suggests.
Central Processor Unit (CPU) As its name suggests, this is a unit which monitors and controls all processes
within the microcontroller and the user cannot affect its work. It consists of several
smaller subunits, of which the most important are:
• Instruction decoder is a part of the electronics which recognizes program
instructions and runs other circuits on the basis of that. The abilities of this
circuit are expressed in the "instruction set" which is different for each
microcontroller family.
-
8/17/2019 Microprocessor Part2
8/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 8 of 14
• Ar ithmeti cal Logical Uni t (ALU) performs all mathematical and logical
operations upon data.
• Accumulator is an SFR closely related to the operation of ALU. It is a kind of
working desk used for storing all data upon which some operations should be
executed (addition, shift etc.). It also stores the results ready for use in further
processing. One of the SFRs, called the Status Register, is closely related to
the accumulator, showing at any given time the "status" of a number stored in
the accumulator (the number is greater or less than zero etc.).
Input/output ports (I/O Ports)
In order to make the microcontroller useful, it is necessary to connect it to
peripheral devices. Each microcontroller has one or more registers (called a port)
connected to the microcontroller pins.
-
8/17/2019 Microprocessor Part2
9/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 9 of 14
Why do we call them input/output ports? Because it is possible to change a
pin function according to the user's needs. These registers are the only registers in
the microcontroller the state of which can be checked by voltmeter!
Oscillator
Even pulses generated by the oscillator enable harmonic and synchronous
operation of all circuits within the microcontroller. It is usually configured as to use
quartz-crystal or ceramics resonator for frequency stabilization. It can also operate
without elements for frequency stabilization (like RC oscillator). It is important to say
that program instructions are not executed at the rate imposed by the oscillator itself,
but several times slower. It happens because each instruction is executed in several
steps. For some microcontrollers, the same number of cycles is needed to execute
any instruction, while it's different for other microcontrollers. Accordingly, if the
system uses quartz crystal with a frequency of 20MHz, the execution time of an
instruction is not expected 50nS, but 200, 400 or even 800 nS, depending on the
type of the microcontroller!
-
8/17/2019 Microprocessor Part2
10/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 10 of 14
Timers/Counters
Most programs use these miniature electronic "stopwatches" in their
operation. These are commonly 8- or 16-bit SFRs the contents of which is
automatically incremented by each coming pulse. Once the register is completely
loaded, an interrupt is generated!
If these registers use an internal quartz oscillator as a clock source, then it is
possible to measure the time between two events (if the register value is T1 at the
moment measurement has started, and T2 at the moment it has finished, then the
elapsed time is equal to the result of subtraction T2-T1 ). If the registers use pulses
coming from external source, then such a timer is turned into a counter.
This is only a simple explanation of the operation itself. It’s somehow more
complicated in practice.
-
8/17/2019 Microprocessor Part2
11/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 11 of 14
Watchdog timer
The Watchdog Timer is a timer connected to a completely separate RC
oscillator within the microcontroller.
If the watchdog timer is enabled, every time it counts up to the program end, the
microcontroller reset occurs and program execution starts from the first instruction.
The point is to prevent this from happening by using a special command. The whole
idea is based on the fact that every program is executed in several longer or shorter
loops.
If instructions resetting the watchdog timer are set at the appropriate program
locations, besides commands being regularly executed, then the operation of the
watchdog timer will not affect the program execution.
If for any reason (usually electrical noise in industry), the program counter "gets
stuck" at some memory location from which there is no return, the watchdog will not
be cleared, so the register’s value being constantly incremented will reach themaximum et voila! Reset occurs!
Power Supply Circuit
There are two things worth attention concerning the microcontroller power
supply circuit:
Brown out is a potentially dangerous state which occurs at the moment the
microcontroller is being turned off or when power supply voltage drops to the lowest
level due to electric noise. As the microcontroller consists of several circuits which
have different operating voltage levels, this can cause its out of control performance.
In order to prevent it, the microcontroller usually has a circuit for brown out reset
built-in. This circuit immediately resets the whole electronics when the voltage level
drops below the lower limit.
Reset pin is usually referred to as Master Clear Reset (MCLR
) and serves forexternal reset of the microcontroller by applying logic zero (0) or one (1) depending
-
8/17/2019 Microprocessor Part2
12/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 12 of 14
on the type of the microcontroller. In case the brown out is not built in the
microcontroller, a simple external circuit for brown out reset can be connected to this
pin.
Serial communication
Parallel connections between the microcontroller and peripherals established
over I/O ports are the ideal solution for shorter distances up to several meters.
However, in other cases, when it is necessary to establish communication between
two devices on longer distances it is obviously not possible to use parallel
connections. Then, serial communication is the best solution.
Today, most microcontrollers have several different systems for serial
communication built in as a standard equipment. Which of them will be used
depends on many factors of which the most important are:
• How many devices the microcontroller has to exchange data with?
• How fast the data exchange has to be?
• What is the distance between devices?
-
8/17/2019 Microprocessor Part2
13/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 13 of 14
• Is it necessary to send and receive data simultaneously?
One of the most important things concerning serial communication is the Protocol
which should be strictly observed. It is a set of rules which must be applied in order
that devices can correctly interpret data they mutually exchange. Fortunately, the
microcontrollers automatically take care of this, so the work of the programmer/user
is reduced to a simple write (data to be sent) and read (received data).
Program
Unlike other integrated circuits which only need to be connected to other
components and turn the power supply on, the microcontrollers need to be
programmed first. This is a so called "bitter pill" and the main reason why hardware-
oriented electronics engineers stay away from microcontrollers. It is a trap causing
huge losses because the process of programming the microcontroller is basically
very simple.
Interrupt - electronics is usually more faster than physical processes it should keep
under control. This is why the microcontroller spends most of its time waiting for
something to happen or execute. In other words, when some event takes place, themicrocontroller does something. In order to prevent the microcontroller from
-
8/17/2019 Microprocessor Part2
14/84
University of TechnologyElectrical Eng. DepartmentMicroprocessor Engineering & Microcontroller
Lecture SixIntroduction to Microcontroller
Ass is t.Prof . Dr. Hadeel Nasrat
Page 14 of 14
spending most of its time endlessly checking for logic state on input pins and
registers, an interrupt is generated. It is the signal which informs the central
processor that something attention worthy has happened. As its name suggests, it
interrupts regular program execution. It can be generated by different sources so
when it occurs, the microcontroller immediately stops operation and checks for the
cause. If it is needed to perform some operations, a current state of the program
counter is pushed onto the Stack and the appropriate program is executed. It's the
so called interrupt routine.
Stack is a part of RAM used for storing the current state of the program
counter (address) when an interrupt occurs. In this way, after a subroutine or an
interrupt execution, the microcontroller knows from where to continue regular
program execution. This address is cleared after returning to the program because
there is no need to save it any longer, and one location of the stack is automatically
availale for further use. In addition, the stack can consist of several levels. This
enables subroutines’ nesting, i.e. calling one subroutine from another.
-
8/17/2019 Microprocessor Part2
15/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 1 of 24
8051 Microco nt ro l ler
The Intel MCS-51 is a Harvard architecture, single chip microcontroller (µC)
series which was developed by Intel in 1980 for use in embedded systems. Intel's
original versions were popular in the 1980s and early 1990s. While Intel no longer
manufactures the MCS-51, binary compatible derivatives remain popular today. In
addition to these physical devices, several companies also offer MCS-51 derivatives as
IP cores for use in FPGAs or ASICs designs.
Intel's original MCS-51 family was developed using NMOS technology, but later
versions, identified by a letter C in their name (e.g., 80C51) used CMOS technology and
consumed less power than their NMOS predecessors. This made them more suitable for
battery-powered devices.
The main features of 8051 µC are:
• 8-bit ALU, Accumulator and 8-bit Registers; hence it is an 8-bit microcontroller
• 8-bit data bus – It can access 8 bits of data in one operation
• 16-bit address bus – It can access 2 16 memory locations – 64 KB (65536
locations) each of RAM and ROM
• On-chip RAM – 128 bytes (data memory)
• On-chip ROM – 4 kByte (program memory)
• Four byte bi-directional input/output port
• One serial interface (UART serial port)
•
Two 16-bit Counter /timers• Two-level interrupt priority
http://en.wikipedia.org/wiki/Harvard_architecturehttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/Intelhttp://en.wikipedia.org/wiki/Embedded_systemhttp://en.wikipedia.org/wiki/Binary_compatiblehttp://en.wikipedia.org/wiki/IP_corehttp://en.wikipedia.org/wiki/FPGAshttp://en.wikipedia.org/wiki/ASICshttp://en.wikipedia.org/wiki/NMOS_logichttp://en.wikipedia.org/wiki/CMOShttp://en.wikipedia.org/wiki/Arithmetic_logic_unithttp://en.wikipedia.org/wiki/8-bithttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/Data_bushttp://en.wikipedia.org/wiki/Address_bushttp://en.wikipedia.org/wiki/Kilobytehttp://en.wikipedia.org/wiki/Byteshttp://en.wikipedia.org/wiki/Bytehttp://en.wikipedia.org/wiki/Input/outputhttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Timerhttp://en.wikipedia.org/wiki/Interrupthttp://en.wikipedia.org/wiki/Interrupthttp://en.wikipedia.org/wiki/Timerhttp://en.wikipedia.org/wiki/Serial_porthttp://en.wikipedia.org/wiki/Input/outputhttp://en.wikipedia.org/wiki/Bytehttp://en.wikipedia.org/wiki/Byteshttp://en.wikipedia.org/wiki/Kilobytehttp://en.wikipedia.org/wiki/Address_bushttp://en.wikipedia.org/wiki/Data_bushttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/8-bithttp://en.wikipedia.org/wiki/Arithmetic_logic_unithttp://en.wikipedia.org/wiki/CMOShttp://en.wikipedia.org/wiki/NMOS_logichttp://en.wikipedia.org/wiki/ASICshttp://en.wikipedia.org/wiki/FPGAshttp://en.wikipedia.org/wiki/IP_corehttp://en.wikipedia.org/wiki/Binary_compatiblehttp://en.wikipedia.org/wiki/Embedded_systemhttp://en.wikipedia.org/wiki/Intelhttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/Harvard_architecture
-
8/17/2019 Microprocessor Part2
16/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 2 of 24
• Power saving mode (on some derivatives)
• only 1 On chip oscillator (external crystal)
• 6 interrupt sources (2 external , 3 internal, Reset)
• 64K external code (program) memory(only read)PSEN
• 64K external data memory(can be read and write) by RD,WR
• Code memory is selectable by EA (internal or external)
8051 FamilySome of the microcontrollers of 8051 family are given as follows:
DEVICE
ON-CHIPDATA
MEMORY (bytes)
ON-CHIPPROGRAMMEMORY
(bytes)
16-BITTIMER/COUNTER
NO. OFVECTOREDINTERUPTS
FULLDUPLEX
I/O
8031 128 None 2 5 1
8032 256 none 2 6 1
8051 128 4k ROM 2 5 1
8052 256 8k ROM 3 6 1
8751 128 4k EPROM 2 5 1
8752 256 8k EPROM 3 6 1
AT89C51 128 4k FlashMemory 2 5 1
AT89C52 256 8k Flashmemory 3 6 1
http://en.wikipedia.org/wiki/Power_managementhttp://en.wikipedia.org/wiki/Power_management
-
8/17/2019 Microprocessor Part2
17/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 3 of 24
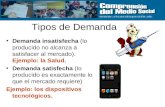
Pin Diagram of 8051 µC and Pin description of 8051 µC
Figure (1) shows the Pin diagram of 8086. The description follows it.
Fig. 1: (a) 8051 Pin Diagram (b) 8051 Schematic Pin out .
(a) (b)
http://www.8085projects.info/post/Pin-Diagram-of-8086-and-Pin-description-of-8086.aspxhttp://www.8085projects.info/post/Pin-Diagram-of-8086-and-Pin-description-of-8086.aspx
-
8/17/2019 Microprocessor Part2
18/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 4 of 24
Pinout Description
Pins 1-8: Port 1 Each of these pins can be configured as an input or an output.
Pin 9: RS A logic one on this pin disables the microcontroller and clears the contents of
most registers. In other words, the positive voltage on this pin resets the microcontroller.
By applying logic zero to this pin, the program starts execution from the beginning.
Pins10-17: Port 3 Similar to port 1, each of these pins can serve as general input or
output. Besides, all of them have alternative functions:
Port 3 Alternate Functions
Pin 10: RXD Serial asynchronous communication input or Serial synchronous
communication output.
Pin 11: TXD Serial asynchronous communication output or Serial synchronouscommunication clock output.
Pin 12: INT0 Interrupt 0 input.
Pin 13: INT1 Interrupt 1 input.
Pin 14: T0 Counter 0 clock input.
Pin 15: T1 Counter 1 clock input.
Pin 16: WR Write to external (additional) RAM.
-
8/17/2019 Microprocessor Part2
19/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 5 of 24
Pin 17: RD Read from external RAM.
Pin 18, 19: X2, X1 Internal oscillator input and output. A quartz crystal which specifies
operating frequency is usually connected to these pins. Instead of it, miniature ceramics
resonators can also be used for frequency stability. Later versions of microcontrollers
operate at a frequency of 0 Hz up to over 50 Hz.
Pin 20: GND Ground.
Pin 21-28: Port 2 If there is no intention to use external memory then these port pins are
configured as general inputs/outputs. In case external memory is used, the higher
address byte, i.e. addresses A8-A15 will appear on this port. Even though memory with
capacity of 64Kb is not used, which means that not all eight port bits are used for its
addressing, the rest of them are not available as inputs/outputs.
Pin 29: PSEN If external ROM is used for storing program then a logic zero (0) appears
on it every time the microcontroller reads a byte from memory.
Pin 30: ALE Prior to reading from external memory, the microcontroller puts the lower
address byte (A0-A7) on P0 and activates the ALE output. After receiving signal from the
ALE pin, the external register (usually 74HCT373 or 74HCT375 add-on chip) memorizes
the state of P0 and uses it as a memory chip address. Immediately after that, the ALU
pin is returned its previous logic state and P0 is now used as a Data Bus. As seen, port
data multiplexing is performed by means of only one additional (and cheap) integrated
circuit. In other words, this port is used for both data and address transmission.
Pin 31: EA By applying logic zero to this pin, P2 and P3 are used for data and address
transmission with no regard to whether there is internal memory or not. It means that
even there is a program written to the microcontroller, it will not be executed. Instead, the
program written to external ROM will be executed. By applying logic one to the EA pin,
the microcontroller will use both memories, first internal then external (if exists).
Pin 32-39: Port 0 Similar to P2, if external memory is not used, these pins can be used
as general inputs/outputs. Otherwise, P0 is configured as address output (A0-A7) when
-
8/17/2019 Microprocessor Part2
20/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 6 of 24
the ALE pin is driven high (1) or as data output (Data Bus) when the ALE pin is driven
low (0).
Pin 40: VCC +5V power supply.
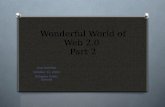
Architecture or Functional Block Diagram of 8051
8051 employs Harvard architecture. It has some peripherals such as 32 bit digital
I/O, Timers and Serial I/O. The basic architecture of 8051 is given in fig 2.
Fig. (2): basic architecture of 8051
-
8/17/2019 Microprocessor Part2
21/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 7 of 24
Fig. 3: Internal Architecture of 8051
-
8/17/2019 Microprocessor Part2
22/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 8 of 24
Input/Output Ports (I/O Ports)
All 8051 microcontrollers have 4 I/O ports each comprising 8 bits which can be
configured as inputs or outputs.
Accordingly, in total of 32 input/output pins enabling the microcontroller to be
connected to peripheral devices are available for use.
Pin configuration, i.e. whether it is to be configured as an input (1) or an output (0),
depends on its logic state.
In order to configure a microcontroller pin as an input, it is necessary to apply logic
zero (0) to appropriate I/O port bit. In this case, voltage level on appropriate pin will
be 0.
Similarly, in order to configure a microcontroller pin as an input, it is necessary to
apply a logic one (1) to appropriate port. In this case, voltage level on appropriate pin
will be 5V (as is the case with any TTL input).
This may seem confusing but don't loose your patience. It all becomes clear after
studying simple electronic circuits connected to an I/O pin.
Fig. 4: 8051 Port 3 Bit Latches and I/O
-
8/17/2019 Microprocessor Part2
23/84
-
8/17/2019 Microprocessor Part2
24/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 10 of 24
1. write a 1 to the pin
2. output pin isVcc
Fig. 6 : Writing “1” to Output Pin P1.X
1. write a 0 to the pin
2. output pin isground
Fig. 7: Writing “0” to Output Pin P1.X
0
1
0
1
X
-
8/17/2019 Microprocessor Part2
25/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 11 of 24
1. write a 1 to the pinMOV P1,#0FFH
2. MOV A,P1external pin=High
Fig. 8 : Reading “High” at Input Pin
0
1
X
3. Read pin=1 Read latch=0Write to latch=1
1. write a 1 to the pinMOV P1,#0FFH
2. MOV A,P1external pin=Low
Fig. 9 : Reading “LOW” at Input Pin
0
1
X
3. Read pin=1 Read latch=0Write to latch=1
1
0
-
8/17/2019 Microprocessor Part2
26/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 12 of 24
Port 0
The P0 port is characterized by two functions. If external memory is used then the
lower address byte (addresses A0-A7) is applied on it. Otherwise, all bits of this port are
configured as inputs/outputs.
The other function is expressed when it is configured as an output. Unlike other ports
consisting of pins with built-in pull-up resistor connected by its end to 5 V power supply,
pins of this port have this resistor left out. This apparently small difference has its
consequences:
If any pin of this port is configured as an input then it acts as if it “floats”. Such an input
has unlimited input resistance and in determined potential.
When the pin is configured as an output, it acts as an “open drain”. By applying logic 0 to
a port bit, the appropriate pin will be connected to ground (0V). By applying logic 1, the
external output will keep on “floating”. In order to apply logic 1 (5V) on this output pin, it is
necessary to built in an external pull-up resistor.
Fig. 11 : Output Pin with external pull-up
Fig. 10 : Port 0
-
8/17/2019 Microprocessor Part2
27/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 13 of 24
Port 1
P1 is a true I/O port, because it doesn't have any alternative functions as is the
case with P0, but can be cofigured as general I/O only. It has a pull-up resistor built-in
and is completely compatible with TTL circuits.
Port 2
P2 acts similarly to P0 when external memory is used. Pins of this port occupy
addresses intended for external memory chip. This time it is about the higher address
byte with addresses A8-A15. When no memory is added, this port can be used as a
general input/output port showing features similar to P1.
Port 3
All port pins can be used as general I/O, but they also have an alternative
function. In order to use these alternative functions, a logic one (1) must be applied to
appropriate bit of the P3 register. In terms of hardware, this port is similar to P0, with the
difference that its pins have a pull-up resistor built-in.
Memory Organization
The 8051 has two types of memory and these are Program Memory and Data
Memory. Program Memory (ROM) is used to permanently save the program being
executed, while Data Memory (RAM) is used for temporarily storing data and
intermediate results created and used during the operation of the microcontroller.
Depending on the model in use All 8051 microcontrollers have a 16-bit addressing bus
and are capable of addressing 64 kb memory. It is neither a mistake nor a big ambition of
engineers who were working on basic core development. It is a matter of smart memory
organization which makes these microcontrollers a real “programmers’ goody“.
-
8/17/2019 Microprocessor Part2
28/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 14 of 24
Program Memory
The first models of the 8051 microcontroller family did not have internal program
memory. It was added as an external separate chip. These models are recognizable by
their label beginning with 803 (for example 8031 or 8032). All later models have a few
Kbyte ROM embedded. Even though such an amount of memory is sufficient for writing
most of the programs, there are situations when it is necessary to use additional memory
as well. A typical example are so called lookup tables. They are used in cases when
equations describing some processes are too complicated or when there is no time forsolving them. In such cases all necessary estimates and approximates are executed in
advance and the final results are put in the tables (similar to logarithmic tables).
Fig. 12 : External program memory of the 8051
-
8/17/2019 Microprocessor Part2
29/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 15 of 24
How does the microcontroller handle external memory depends on the EA pin logic state:
EA=0 In this case, the microcontroller completely ignores internal program memory andexecutes only the program stored in external memory.
EA=1 In this case, the microcontroller executes first the program from built-in ROM, then
the program stored in external memory.
In both cases, P0 and P2 are not available for use since being used for data and address
transmission. Besides, the ALE and PSEN pins are also used.
Fig. 13 : Program memory depends on the EA pin logic state
-
8/17/2019 Microprocessor Part2
30/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 16 of 24
Data Memory
As already mentioned, Data Memory is used for temporarily storing data and
intermediate results created and used during the operation of the microcontroller.
Besides, RAM memory built in the 8051 family includes many registers such as hardware
counters and timers, input/output ports, serial data buffers etc. The previous models had
256 RAM locations, while for the later models this number was incremented by additional
128 registers. However, the first 256 memory locations (addresses 0-FFh) are the heart
of memory common to all the models belonging to the 8051 family. Locations available tothe user occupy memory space with addresses 0-7FH, i.e. first 128 registers. This part of
RAM is divided in several blocks.
The first block consists of 4 banks each including 8 registers denoted by R0-R7. Prior to
accessing any of these registers, it is necessary to select the bank containing it. The next
memory block (address 20H-2FH) is bit- addressable, which means that each bit has its
own address (0-7FH). Since there are 16 such registers, this block contains in total of
128 bits with separate addresses (address of bit 0 of the 20H byte is 0, while address of
bit 7 of the 2FH byte is 7FH). The third group of registers occupy addresses 2FH-7FH,
i.e. 80 locations, and does not have any special functions or features.
Additional RAM
In order to satisfy the programmers’ constant hunger for Data Memory, the
manufacturers decided to embed an additional memory block of 128 locations into thelatest versions of the 8051 microcontrollers. However, it’s not as simple as it seems to
be… The problem is that electronics performing addressing has 1 byte (8 bits) on
disposal and is capable of reaching only the first 256 locations, therefore. In order to
keep already existing 8-bit architecture and compatibility with other existing models a
small trick was done.
-
8/17/2019 Microprocessor Part2
31/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 17 of 24
Fig. 14 : Additional Data memory of the 8051
-
8/17/2019 Microprocessor Part2
32/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 18 of 24
What does it mean? It means that additional memory block shares the same addresses
with locations intended for the SFRs (80h- FFh). In order to differentiate between these
two physically separated memory spaces, different ways of addressing are used. The
SFRs memory locations are accessed by direct addressing, while additional RAM
memory locations are accessed by indirect addressing.
Memory expansion
In case memory (RAM or ROM) built in the microcontroller is not sufficient, it is possible
to add two external memory chips with capacity of 64Kb each. P2 and P3 I/O ports are
used for their addressing and data transmission.
Fig. (15): Memory Expansion in the 8051 microcontroller
-
8/17/2019 Microprocessor Part2
33/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 19 of 24
From the user’s point of view, everything works quite simply when properly connected
because most operations are performed by the microcontroller itself. The 8051
microcontroller has two pins for data read RD P3.7) and PSEN . The first one is used for
reading data from external data memory (RAM), while the other is used for reading data
from external program memory (ROM). Both pins are active low. A typical example of
memory expansion by adding RAM and ROM chips (Hardward architecture), is shown in
figure above.
Even though additional memory is rarely used with the latest versions of the
microcontrollers, we will describe in short what happens when memory chips are
connected according to the previous schematic. The whole process described below is
performed automatically.
When the program during execution encounters an instruction which resides in
external memory (ROM), the microcontroller will activate its control output ALE
and set the first 8 bits of address (A0-A7) on P0. IC circuit 74HCT573 passes
the first 8 bits to memory address pins.
A signal on the ALE pin latches the IC circuit 74HCT573 and immediately
afterwards 8 higher bits of address (A8-A15) appear on the port. In this way, a
desired location of additional program memory is addressed. It is left over to
read its content.
Port P0 pins are configured as inputs, the PSEN pin is activated and the
microcontroller reads from memory chip.
Similar occurs when it is necessary to read location from external RAM. Addressing is
performed in the same way, while read and write are performed via signals appearing onthe control outputs RD (is short for read) or WR (is short for write).
Special Function Registers
The set of Special Function Registers (SFRs) contains important registers such as
Accumulator, Register B, I/O Port latch registers, Stack pointer, Data Pointer, Processor
Status Word (PSW) and various control registers. Some of these registers are bit
addressable.
-
8/17/2019 Microprocessor Part2
34/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 20 of 24
The SFRs are in locations 80H to FFH of the on-chip RAM. In the 8051 not all locations
are used. These extra locations are used by other family members (8052, etc.) for the
extra features these microcontrollers possess. The detailed map of various registers is
shown in the following figure. As you can see, some of the SFRs are bit addressable,
including the four ports P0, P1, P2 and P3.
A Register (Accumulator)
A register is a general-purpose register used for storing intermediate results
obtained during operation. Prior to executing an instruction upon any number or operand
it is necessary to store it in the accumulator first. All results obtained from arithmetical
operations performed by the ALU are stored in the accumulator. Data to be moved from
one register to another must go through the accumulator. In other words, the A register is
Fig. 16: Summary of the 8051 on-chip data memory
(Special Function Registers)
-
8/17/2019 Microprocessor Part2
35/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 21 of 24
the most commonly used register and it is impossible to imagine a microcontroller
without it. More than half instructions used by the 8051 microcontroller use somehow the
accumulator.
B Register
The B register is used together with the accumulator for multiply and divide operations.
• The MUL AB instruction multiplies the values in A and B and stores the low-byte
of the result in A and the high-byte in B.o For example, if the accumulator contains F5H and the B register contains
02H, the result of MUL AB will be A = EAH and B = 01H.
• The DIV AB instruction divides A by B leaving the integer result in A and the
remainder by B.
o For example, if the accumulator contains 07H and the B register contains
02H, the result of DIV AB will be A = 03H and B = 01H.
The B register is also bit-addressable.
Program Status Word Register
PSW register is one of the most important SFRs. It contains several status bits
that reflect the current state of the CPU. Besides, this register contains Carry bit,
Auxiliary Carry, two register bank select bits, Overflow flag, parity bit and user-definable
status flag.
P - Parity bit. If a number stored in the accumulator is even then this bit will be
automatically set (1), otherwise it will be cleared (0). It is mainly used during data
transmit and receive via serial communication.
-
8/17/2019 Microprocessor Part2
36/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 22 of 24
- Bit 1. This bit is intended to be used in the future versions of microcontrollers.
OV Overflow occurs when the result of an arithmetical operation is larger than 255 and
cannot be stored in one register. Overflow condition causes the OV bit to be set (1).
Otherwise, it will be cleared (0).
RS0, RS1 - Register bank select bits. These two bits are used to select one of four
register banks of RAM. By setting and clearing these bits, registers R0-R7 are stored in
one of four banks of RAM.
RS1 RS2 Register Bank Address of Register Bank
0 0 0 00H to 07H0 1 1 08H to 0FH
1 0 2 10H to 17H1 1 3 18H to 1FH
F0 - Flag 0. This is a general-purpose bit available for use.
AC - Auxiliary Carry Flag is used for BCD operations only.
CY - Carry Flag is the (ninth) auxiliary bit used for all arithmetical operations and shift
instructions.
R Registers (R0-R7)
This is a common name for 8
general-purpose registers (R0, R1, R2
...R7). Even though they are not true SFRs,
they deserve to be discussed here because
of their purpose. They occupy 4 banks
within RAM. Similar to the accumulator,
they are used for temporary storing
variables and intermediate results during
operation. Which one of these banks is to
-
8/17/2019 Microprocessor Part2
37/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 23 of 24
be active depends on two bits of the PSW Register. Active bank is a bank the registers
of which are currently used.
The following example best illustrates the purpose of these registers. Suppose it is
necessary to perform some arithmetical operations upon numbers previously stored in
the R registers: (R1+R2) - (R3+R4). Obviously, a register for temporary storing results of
addition is needed. This is how it looks in the program:
MOV A,R3; Means: move number from R3 into accumulator
ADD A,R4; Means: add number from R4 to accumulator (result remains in accumulator)MOV R5,A; Means: temporarily move the result from accumulator into R5
MOV A,R1; Means: move number from R1 to accumulator
ADD A,R2; Means: add number from R2 to accumulator
SUBB A,R5; Means: subtract number from R5 (there are R3+R4)
Data Pointer Register (DPTR)
DPTR register is not a true one because it doesn't physically exist. It consists of
two separate registers: DPH (Data Pointer High) and (Data Pointer Low). For this reason
it may be treated as a 16-bit register or as two independent 8-bit registers. Their 16 bits
are primarly used for external memory addressing. Besides, the DPTR Register is
usually used for storing data and intermediate results. Besides, the DPTR Register is
usually used for storing data and intermediate results.
Stack Pointer (SP) Register
The stack pointer (SP) is an 8-bit register at location 81H. A stack is used for
temporarily storing data. It operates on the basis of last in first out (LIFO). Putting data
onto the stack is called "pushing onto the stack" while taking data off the stack is called
"popping the stack."
The stack pointer contains the address of the item currently on top of the stack. On
power-up or reset the SP is set to 07H. When pushing data onto the stack, the SP is first
increased by one and the data is then placed in the location pointed to by the SP. Whenpopping the stack, the data is taken off the stack and the SP is then decreased by one.
-
8/17/2019 Microprocessor Part2
38/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Seven8051 Microcontrol lerAs sist .Prof. Dr. Hadeel Nasrat
Page 24 of 24
Since reset initializes the SP to 07H, the first item pushed onto the stack is stored at 08H
(remember, the SP is incremented first, then the item is placed on the stack). However, if
the programmer wishes to use the register banks 1 to 3, which start at address 08H,
he/she must move the stack to another part of memory. The general purpose RAM
starting at address 30H is a good spot to place the stack. To do so we need to change
the contents of the SP.
MOV SP, #2FH.
Now, the first item to be pushed onto the stack will be stored at 30H.
P0, P1, P2, P3 - Input/Output Registers
If neither external memory nor serial communication system are used then 4 ports with in
total of 32 input/output pins are available for connection to peripheral environment. Eachbit within these ports affects the state and performance of appropriate pin of the
microcontroller. Thus, bit logic state is reflected on appropriate pin as a voltage (0 or 5 V)
and vice versa, voltage on a pin reflects the state of appropriate port bit.
As mentioned, port bit state affects performance of port pins, i.e. whether they will be
configured as inputs or outputs. If a bit is cleared (0), the appropriate pin will be
configured as an output, while if it is set (1), the appropriate pin will be configured as an
input. Upon reset and power-on, all port bits are set (1), which means that all appropriate
pins will be configured as inputs.
-
8/17/2019 Microprocessor Part2
39/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 1 of 16
8051 Addressing Modes
There are 8 addressing modes. The addressing mode determines how the
operand byte is selected. The direct and indirect addressing modes are used to
distinguish between the SFR space and data memory space. The relative instructions
are based on the value of the program counter. The absolute instructions operate in the
same manner. Indexed instructions use a calculation to generate the address used as
part of the instruction.
Register MOV A, B
Direct MOV 30H,A
Indirect ADD A,@R0
Immediate Constant ADD A,#80 H
Relative* SJMP +127/-128 of PC
Absolute* AJMP within 2K
Long* LJMP FAR
Indexed MOVC A,@A+PC
* Related to program branching instructions
Register Addressing
♦ In the Register Addressing mode, the instruction involves transfer of informationbetween registers,
♦ The accumulator is referred to as the A register.
MOV R0, A
-
8/17/2019 Microprocessor Part2
40/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 2 of 16
Direct Addressing
♦ In Direct Addressing mode you specify the operand by giving its actual memory
address (in Hexadecimal) or by giving its abbreviated name.
MOV A, P3 ; Transfer the contents of Port 3 to the accumulator
MOV A, 020H ; Transfer the contents of RAM location 20H to the
accumulator
Indirect Addressing
♦ In the Indirect Addressing mode, a register is used to hold the effective address of
the operand.
♦ This register, which holds the address, is called the pointer register and is said to
point to the operand.
♦ Only registers R0, R1 and DPTR can be used as pointer registers.♦ R0 and R1 registers can hold an 8-bit address whereas DPTR can hold a 16-bit
address.
♦ DPTR is useful in accessing operands which are in the external memory.
MOV @R0,A ; Store the content of accumulator into the memory
; location pointed to by the contents of
; register R0. R0 could have an
; 8-bit address, such as 60H.
MOVX A,@DPTR ; Transfer the contents from the memory location
; pointed to by DPTR into the accumulator
; DPTR could have a 16-bit address, such as 1234H.
-
8/17/2019 Microprocessor Part2
41/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 3 of 16
Immediate Constant Addressing
♦ In the Immediate Constant Addressing mode, the source operand is an 8- or 16-bit
constant value.
♦ This constant is specified in the instruction itself (rather than in a register or a
memory location).
♦ The destination register should hold the same data size which is specified by the
source operand.
ADD A,#030H ; Add 8-bit value of 30H to the accumulator register
; (which is an 8-bit register).
MOV DPTR,#0FE00H ; Move 16-bit data constant FE00H into the
; 16-bit Data Pointer Register.
Relative Addressing
♦ The Relative Addressing mode is used with some type of jump instructions like
SJMP (short jump) and conditional jumps like JNZ.
♦ This instruction transfers control from one part of a program to another.
GoBack: DEC A ; Decrement A
JNZ GoBack ; If A is not zero, loop back
Absolute Addressing
♦ In Absolute Addressing mode, the absolute address, to which the control is
transferred, is specified by a label.
♦ Two instructions associated with this mode of addressing are ACALL and AJMP
instructions.
♦ These are 2-byte instructions.
ACALL PORT_INIT ;PORT_INIT should be
;located within 2k bytes.
PORT_INIT: MOV P0, #0FH ;PORT_INIT subroutine
-
8/17/2019 Microprocessor Part2
42/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 4 of 16
Long Addressing
♦ This mode of addressing is used with the LCALL and LJMP instructions.
♦ It is a 3-byte instruction and the last 2 bytes specify a 16-bit destination location
where the program branches to.
♦ It allows use of the full 64K code space.
LCALL TIMER_INIT ; TIMER_INIT address (16-bits ;long) is
; specified as the operand
; In C, this will be a
;function call: Timer_Init().
TIMER_INIT: ORL TMOD,#01H ;TIMER_INIT subroutine
Indexed Addressing
♦ The Indexed addressing is useful when there is a need to retrieve data from a look-
up table (LUT).
♦
A 16-bit register (data pointer) holds the base address and the accumulator holds an8-bit displacement or index value.
♦ The sum of these two registers forms the effective address for a JMP or MOVC
instruction.
MOV A, #08H ; Offset from table start
MOV DPTR, #01F00H ; Table start address
MOVC A, @A+DPTR ; Gets target value from the table
; start address + offset and puts it ;in A.
♦ After the execution of the above instructions, the program will branch to address
1F08H (1F00H+08H) and transfer into the accumulator the data byte retrieved from
that location (from the look-up table)
8051 Instructions Set
The process of writing program for the microcontroller mainly consists of giving
instructions (commands) in the specific order in which they should be executed in order
to carry out a specific task. All commands are known as INSTRUCTION SET. All
-
8/17/2019 Microprocessor Part2
43/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 5 of 16
microcontrollers compatible with the 8051 have in total of 255 instructions, i.e. 255
different words available for program writing. Here is a list of the operands and their
meanings:
• A - accumulator;
Rn - is one of working registers (R0-R7) in the currently active RAM memory bank;
• Direct - is any 8-bit address register of RAM. It can be any general-purpose register
or a SFR (I/O port, control register etc.);
• @Ri - is indirect internal or external RAM location addressed by register R0 or R1;
• #data - is an 8-bit constant included in instruction (0-255);
• #data16 - is a 16-bit constant included as bytes 2 and 3 in instruction (0-65535);
• addr16 - is a 16-bit address. May be anywhere within 64KB of program memory;
• addr11 - is an 11-bit address. May be within the same 2KB page of program
memory as the first byte of the following instruction;
• rel - is the address of a close memory location (from -128 to +127 relative to the
first byte of the following instruction). On the basis of it, assembler computes the
value to add or subtract from the number currently stored in the program counter;• bit - is any bit-addressable I/O pin, control or status bit; and
• C - is carry flag of the status register (register PSW).
Types of instructions
The C8051 instructions are divided into five functional groups:
Arithmetic operations
Logical operations
Data transfer operations
Boolean variable operations
Program branching operations
-
8/17/2019 Microprocessor Part2
44/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 6 of 16
Arithmetic instructions
Mnemonics Description Bytes Cycles
ADD A, Rn A A + Rn 1 1
ADD A, direct A A + (direct) 2 1
ADD A, @Ri A A + @Ri 1 1
ADD A, #data A A + data 2 1
ADDC A, Rn A A + Rn + C 1 1
ADDC A, direct A A + (direct) + C 2 1
ADDC A, @Ri A A + @Ri + C 1 1
ADDC A, #data A A + data + C 2 1
DA A Decimal adjust accumulator 1 1
DIV ABDivide A by B
A quotient ; B remainder1 4
DEC A A A -1 1 1
DEC Rn Rn Rn - 1 1 1
DEC direct (direct) (direct) - 1 2 1
DEC @Ri @Ri @Ri - 1 1 1
INC A A A+1 1 1
INC Rn Rn Rn + 1 1 1
INC direct (direct) (direct) + 1 2 1
INC @Ri @Ri @Ri +1 1 1INC DPTR DPTR DPTR +1 1 2
MUL ABMultiply A by B
A low byte (A*B) ;B high byte (A* B)1 4
SUBB A, Rn A A - Rn - C 1 1
SUBB A, direct A A - (direct) - C 2 1
SUBB A, @Ri A A - @Ri - C 1 1
SUBB A, #data A A - data - C 2 1
-
8/17/2019 Microprocessor Part2
45/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 7 of 16
Logical Instructions
Mnemonics Description Bytes Cycles
ANL A, Rn A A AND Rn 1 1
ANL A, direct A A AND (direct) 2 1
ANL A, @Ri A A AND @Ri 1 1
ANL A, #data A A AND data 2 1
ANL direct, A (direct) (direct) AND A 2 1 ANL direct, #data (direct) (direct) AND data 3 2
CLR A A 00H 1 1
CPL A A A 1 1
ORL A, Rn A A OR Rn 1 1
ORL A, direct A A OR (direct) 1 1
ORL A, @Ri A A OR @Ri 2 1
ORL A, #data A A OR data 1 1ORL direct, A (direct) (direct) OR A 2 1
ORL direct, #data (direct) (direct) OR data 3 2
RL A Rotate accumulator left 1 1
RLC A Rotate accumulator left through carry 1 1
RR A Rotate accumulator right 1 1
RRC A Rotate accumulator right through carry 1 1
SWAP A Swap nibbles within Acumulator 1 1XRL A, Rn A A EXOR Rn 1 1
XRL A, direct A A EXOR (direct) 1 1
XRL A, @Ri A A EXOR @Ri 2 1
XRL A, #data A A EXOR data 1 1
XRL direct, A (direct) (direct) EXOR A 2 1
XRL direct, #data (direct) (direct) EXOR data 3 2
-
8/17/2019 Microprocessor Part2
46/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 8 of 16
Data Transfer Instructions
Mnemonics Description Bytes Cycles
MOV A, Rn A Rn 1 1
MOV A, direct A (direct) 2 1
MOV A, @Ri A @Ri 1 1
MOV A, #data A data 2 1
MOV Rn, A Rn A 1 1
MOV Rn, direct Rn (direct) 2 2
MOV Rn, #data Rn data 2 1
MOV direct, A (direct) A 2 1
MOV direct, Rn (direct) Rn 2 2
MOV direct1, direct2 (direct1) (direct2) 3 2
MOV direct, @Ri (direct) @Ri 2 2
MOV direct, #data (direct) #data 3 2
MOV @Ri, A @Ri A 1 1
MOV @Ri, direct @Ri (direct) 2 2
MOV @Ri, #data @Ri data 2 1
MOV DPTR, #data16 DPTR data16 3 2
MOVC A, @A+DPTR A Code byte pointed by A + DPTR 1 2
MOVC A, @A+PC A Code byte pointed by A + PC 1 2
MOVC A, @Ri A Code byte pointed by Ri 8-bit address) 1 2
MOVX A, @DPTR A External data pointed by DPTR 1 2
MOVX @Ri, A @Ri A (External data - 8bit address) 1 2
MOVX @DPTR, A @DPTR A(External data - 16bit address) 1 2
PUSH direct (SP) (direct) 2 2
POP direct (direct) (SP) 2 2
XCH Rn Exchange A with Rn 1 1
XCH direct Exchange A with direct byte 2 1
-
8/17/2019 Microprocessor Part2
47/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 9 of 16
XCH @Ri Exchange A with indirect RAM 1 1
XCHD A, @RiExchange least significant nibble of A with
that of indirect RAM1 1
Boolean Variable Instructions
Mnemonics Description Bytes Cycles
CLR C C-bit 0 1 1
CLR bit bit 0 2 1
SET C C 1 1 1
SET bit bit 1 2 1
CPL C C 1 1
CPL bit bit 2 1
ANL C, /bit C C . 2 1 ANL C, bit C C. bit 2 1
ORL C, /bit C C + 2 1
ORL C, bit C C + bit 2 1
MOV C, bit C bit 2 1
MOV bit, C bit C 2 2
Program Branching Instructions
Mnemonics DescriptionBytes Instruction
Cycles
ACALL addr11 PC + 2 (SP) ; addr 11 PC 2 2
AJMP addr11 Addr11 PC 2 2
-
8/17/2019 Microprocessor Part2
48/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 10 of 16
CJNE A, direct, relCompare with A, jump (PC + rel)
if not equal
3 2
CJNE A, #data, relCompare with A, jump (PC + rel)
if not equal
3 2
CJNE Rn, #data, relCompare with Rn, jump (PC + rel)
if not equal
3 2
CJNE @Ri, #data, relCompare with @Ri A, jump (PC +
rel) if not equal
3 2
DJNZ Rn, rel Decrement Rn, jump if not zero 2 2
DJNZ direct, relDecrement (direct), jump if not
zero
3 2
JC rel Jump (PC + rel) if C bit = 1 2 2
JNC rel Jump (PC + rel) if C bit = 0 2 2
JB bit, rel Jump (PC + rel) if bit = 1 3 2
JNB bit, rel Jump (PC + rel) if bit = 0 3 2JBC bit, rel Jump (PC + rel) if bit = 1 3 2
JMP @A+DPTR A+DPTR PC 1 2
JZ rel If A=0, jump to PC + rel 2 2
JNZ rel If A ≠ 0 , jump to PC + rel 2 2
LCALL addr16 PC + 3 (SP), addr16 PC 3 2
LJMP addr 16 Addr16 PC 3 2
NOP No operation 1 1RET (SP) PC 1 2
RETI (SP) PC, Enable Interrupt 1 2
SJMP rel PC + 2 + rel PC 2 2
JMP @A+DPTR A+DPTR PC 1 2
JZ rel If A = 0. jump PC+ rel 2 2
JNZ rel If A ≠ 0, jump PC + rel 2 2
NOP No operation 1 1
-
8/17/2019 Microprocessor Part2
49/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 11 of 16
Example programs
Example 1: - exchange the content of FFh and FF00h
Solution: - here one is internal memory location and other is memory external location.
so first the content of ext memory location FF00h is loaded in acc. then the content of int
memory location FFh is saved first and then content of acc is transferred to FFh. now
saved content of FFh is loaded in acc and then it is transferred to FF00h.
Mov dptr, #0FF00h ; take the address in dptr
Movx a, @dptr ; get the content of 0FF00h in a
Mov r0, 0FFh ; save the content of 0FFh in r0
Mov 0FFh, a ; move a to 0FFh
Mov a, r0 ; get content of 0FFh in a
Movx @dptr, a ; move it to 0FF00h
Example 2: - store the higher nibble of r7 in to both nibbles of r6
Solution: – first we shall get the upper nibble of r7 in r6. Then we swap nibbles of r7 and
make OR operation with r6 so the upper and lower nibbles are duplicated
Mov a, r7 ; get the content in acc
Anl a, #0F0h ; mask lower bitMov r6, a ; send it to r6
Swap a ; xchange upper and lower nibbles of acc
Orl a, r6 ; OR operation
Mov r6, a ; finally load content in r6
Example 3: - treat r6-r7 and r4-r5 as two 16 bit registers. Perform subtraction between
them. Store the result in 20h (lower byte) and 21h (higher byte).
-
8/17/2019 Microprocessor Part2
50/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 12 of 16
Solution: - first we shall clear the carry. Then subtract the lower bytes afterward then
subtract higher bytes.
Clr c ; clear carry
Mov a, r4 ; get first lower byte
Subb a, r6 ; subtract it with other
Mov 20h, a ; store the result
Mov a, r5 ; get the first higher byte
Subb a, r7 ; subtract from other
Mov 21h, a ; store the higher byte
Example 4: - divide the content of r0 by r1. Store the result in r2 (answer) and r3
(reminder). Then restore the original content of r0.
Solution:- after getting answer to restore original content we have to multiply answer with
divider and then add reminder in that.
Mov a, r0 ; get the content of r0 and r1Mov b, r1 ; in register A and B
Div ab ; divide A by B
Mov r2, a ; store result in r2
Mov r3, b ; and reminder in r3
Mov b, r1 ; again get content of r1 in B
Mul ab ; multiply it by answer
Add a, r3 ; add reminder in new answerMov r0, a ; finally restore the content of r0
Example 5: - transfer the block of data from 20h to 29h to external location 1020h to
1029h.
Solution: - here we have to transfer 10 data bytes from internal to external RAM. So
first, we need one counter. Then we need two pointers one for source second fordestination.
-
8/17/2019 Microprocessor Part2
51/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 13 of 16
Mov r7, #0Ah ; initialize counter by 10d
Mov r0, #20h ; get initial source location
Mov dptr, #1020h ; get initial destination location
Nxt: Mov a, @r0 ; get first content in acc
Movx @dptr, a ; move it to external location
Inc r0 ; increment source location
Inc dptr ; increase destination location
Djnz r7, nxt ; decrease r7. if zero then over otherwise move next
Example 6: - find out how many equal bytes between two memory blocks 10h to 19h
and 20h to 29h.
Solution: - here we shall compare each byte one by one from both blocks. Increase the
count every time when equal bytes are found
Mov r7, #0Ah ; initialize counter by 10dMov r0, #10h ; get initial location of block1
Mov r1, #20h ; get initial location of block2
Mov r6, #00h ; equal byte counter. Starts from zero
Nxt: Mov a, @r0 ; get content of block 1 in acc
Mov b, a ; move it to B
Mov a, @r1 ; get content of block 2 in acc
Cjne a, b, nomatch ; compare both if not equalInc r6 ; increment the counter
Nomatch: inc r0 ; otherwise go for second number
Inc r1
djnz r7, nxt ; decrease r7. if zero then over otherwise move next
-
8/17/2019 Microprocessor Part2
52/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 14 of 16
Example 7: - given block of 100h to 200h. Find out how many bytes from this block are
greater then the number in r2 and less then number in r3. Store the count in r4.
Solution: - in this program, we shall take each byte one by one from given block. Now
here two limits are given higher limit in r3 and lower limit in r2. So we check first higher
limit and then lower limit if the byte is in between these limits then count will be
incremented.
Mov dptr, #0100h ; get initial location
Mov r7, #0FFh ; counter
Mov r4, #00h ; number counter
Mov 20h, r2 ; get the upper and lower limits in
Mov 21h, r3 ; 20h and 21h
Nxt: Movx a, @dptr ; get the content in acc
Cjne a, 21h, lower ; check the upper limit first
Sjmp out ; if number is larger
Lower: jnc out ; jump outCjne a, 20h, limit ; check lower limit
Sjmp out ; if number is lower
Limit: jc out ; jump out
Inc r4 ; if number within limit increment count
Out: inc dptr ; get next location
Djnz r7, nxt ; repeat until block completes
Example 8:- the crystal frequency is given as 12 MHz. Make a subroutine that will
generate delay of exact 1 ms. Use this delay to generate square wave of 50 Hz on pin
P2.0
Solution: - 50 Hz means 20 ms. And because of square wave 10 ms on time and 10 ms
off time. So for 10 ms we shall send 1 to port pin and for another 10 ms send 0 incontinuous loop.
-
8/17/2019 Microprocessor Part2
53/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 15 of 16
Loop: Setb p2.0 ; send 1 to port pin
Mov r6, #0Ah ; load 10d in r6
Acall delay ; call 1 ms delay ×10 = 10 ms
Clr p2.0 ; send 0 to port pin
Mov r6, #0Ah ; load 10d in r6
Acall delay ; call 1 ms delay ×10 = 10 ms
Sjmp loop ; continuous loop
Delay: ; load count 250d
Lp2: Mov r7, #0FAh
Lp1: Nop ; 1 cycle
Nop ; 1+1=2 cycles
Djnz r7, lp1 ; 1+1+2 = 4 cycles
Djnz r6, lp2 ; 4×250 = 1000 cycles = 1000 µs = 1 ms
ret
Example 9:- count number of interrupts arriving on external interrupt pin INT1. Stop
whencounter overflows and disable the interrupt. Give the indication on pinP0.0
Solution: - as we know whenever interrupt occurs the PC jumps to one particular location
where it’s ISR is written. So we have to just write one ISR that will do the job
Mov r2, #00h ; initialize the counter
Mov ie, #84h ; enable external interrupt 1Here: Sjmp here ; continuous loop
Org 0013h ; interrupt 1location
Inc r2 ; increment the count
Cjne r2, #00h, out ; check whether it overflows
Mov ie, #00h ; if yes then disable interrupt
Clr p0.0 ; and give indicationOut : reti ; otherwise keep counting
-
8/17/2019 Microprocessor Part2
54/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture Eight8051 Instruc tion SetAs sist .Prof. Dr. Hadeel Nasrat
Page 16 of 16
Example 10: - continuously scan port P0. If data is other then FFh write a subroutine that
will multiply it with 10d and send it to port P1
Solution: - here we have to use polling method. We shall continuously pole port P0 if
there is any data other then FFh. If there is data we shall call subroutine
Agin: Mov p0, #0ffh ; initialize port P0 as input port
Loop: Mova, p0 ; get the data in acc
Cjne a, #0FFh, dat ; compare it with FFh
Sjmp loop ; if same keep looping
Dat: acall multi; if different call subroutine
Sjmp agin ; again start polling
Multi
Mov b,#10d ; load 10d in register B
Mul ab ; multiply it with received data
Mov p1, a ; send the result to P1Ret ;return to main program
-
8/17/2019 Microprocessor Part2
55/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 1 of 22
8051 Timer and Counter
As you already know, the microcontroller oscillator uses quartz crystal for its
operation. As the frequency of this oscillator is precisely defined and very stable, pulses
it generates are always of the same width, which makes them ideal for time
measurement. Such crystals are also used in quartz watches. In order to measure time
between two events it is sufficient to count up pulses coming from this oscillator. That is
exactly what the timer does. If the timer is properly programmed, the value stored in its
register will be incremented (or decremented) with each coming pulse, i.e. once per each
machine cycle. A single machine-cycle instruction lasts for 12 quartz oscillator periods,
which means that by embedding quartz with oscillator frequency of 12MHz, a number
stored in the timer register will be changed million times per second, i.e. each
microsecond.
The 8051 microcontroller has 2 timers/counters called T0 and T1. As their names
suggest, their main purpose is to:1. Measure time between events
2. Generate required amount of time
3. Count events
4. Generate baud rate for Serial communication
-
8/17/2019 Microprocessor Part2
56/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 2 of 22
Timer increments by 1 every machine cycle
Counter Increments at every input pulse
Time of 1 Machine Cycle, for 12 MHZ crystal? 1 micro second for crystal of 12 MHz
Time of 1 Machine Cycle for 11.0592 MHz crystal?
♦ Oscillator (Crystal) : 11.0592 MHz
♦ 12 Clock cycles make 1 Machine cycle
♦ Time of 1 clock cycle = 1 / 11.0592 MHz
♦ Time of 1 Machine Cycle = 12* (1 / 11.0592 MHz )
♦ 1 Machine Cycle = 1.0851 Micro Seconds
Timer Registers
♦ TCON Timer Control
♦ TMOD Timer Mode
♦ TH0/TL0 Timer 0 16 bit register (byte addressable only)
♦ TH1/TL1 Timer 1 16 bit register (byte addressable only)
Timer Control (TCON) Register
• TCON register is also one of the registers whose bits are directly in control of timer
operation.
• Only 4 bits of this register are used for this purpose, while rest of them is used for
interrupt control to be discussed later.
• TFx : Timer x overflow flag. It causes interrupt. It is set by hardware and cleared
after interrupt processing.
• TRx: Timer x run control bit. Set/Cleared by software to turn Timer/Counter on/off
o 1 - Timer is enabled.
o 0 - Timer is disabled.
-
8/17/2019 Microprocessor Part2
57/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 3 of 22
• IEx: Interrupt x Edge Flag; Set when detected external interrupt edge, and cleared
after interrupt processing.
• ITx: Interrupt x Type control bit. Set/Cleared by software falling edge triggered
external interrupts
TMOD Register (Timer Mode)
The TMOD register selects the operational mode of the timers T0 and T1. As seen
in figure below, the low 4 bits (bit0 - bit3) refer to the timer 0, while the high 4 bits (bit4 -
bit7) refer to the timer 1. There are 4 operational modes and each of them is describedherein.
Bits of this register have the following function:
• GATE1 enables and disables Timer by means of a signal brought to the INT pin(P3.2, P3.3):
o 1 - Timer operates only if the INT bit is set.
o 0 - Timer operates regardless of the logic state of the INT bit.
• T C selects pulses to be counted up by the timer/counter :
o 1 - Counter counts pulses brought to the T pin (P3.4, P3.5).
o 0 - Timer counts pulses from internal oscillator.
• M1M0 These two bits select the operational mode of the Timer.
M 1 M 0 M O D E D E S C R I P T I O N
0 0 0 13-bit timer
0 1 1 16-bit timer
1 0 2 8-bit auto-reload
1 1 3 Split mode
-
8/17/2019 Microprocessor Part2
58/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 4 of 22
Timer Operation
♦ Configure timers (TMOD)
♦ Initialize values (TH and TL)
♦ Start and Stop Timer (TCON)
Using 8051 Timers
♦ TH and TL contain the ‘value’ of timer
♦ Timers count UP. This value will be incremented by 1 every machine
cycle
♦ When TH and TL have maximum value, next machine cycle would set them
both to ZERO.
Configuring Timers TMOD
♦ Timer 0 in Mode1 ; Timer 1 in Mode3
♦ MOV tmod,#00110001b
♦ OR MOV tmod,#31h
Controlling Timers TCON
SETB TR0 ;running the timer
Label: JNB TF0, Label ; waiting till overflow flag is set
Timer T0
As seen in figure below, the timer T0 consists of two registers – TH0 and TL0
representing a low and a high byte of one 16- digit binary number.
Accordingly, if the content of the timer T0 is equal to 0 (T0=0) then both registers it
consists of will contain 0. If the timer contains for example number 1000 (decimal), then
-
8/17/2019 Microprocessor Part2
59/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 5 of 22
the TH0 register (high byte) will contain the number 3, while the TL0 register (low byte)
will contain decimal number 232.
Formula used to calculate values in these two registers is very simple:
TH0 × 256 + TL0 = T
Matching the previous example it would be as follows:
3 × 256 + 232 = 1000
Since the timer T0 is virtually 16-bit register, the largest value it can store is 65 535. In
case of exceeding this value, the timer will be automatically cleared and counting starts
from 0. This condition is called an overflow. Two registers TMOD and TCON are closelyconnected to this timer and control its operation.
Timer 1
Timer 1 is identical to timer 0, except for mode 3 which is a hold-count mode. It
means that they have the same function, their operation is controlled by the same
registers TMOD and TCON and both of them can operate in one out of 4 different
modes.
-
8/17/2019 Microprocessor Part2
60/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 6 of 22
Internal Architecture of the 8051 Timer
-
8/17/2019 Microprocessor Part2
61/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 7 of 22
Mode 0 (13-bit timer)
This is one of the rarities being kept only for the purpose of compatibility with the
previous versions of microcontrollers. This mode configures timer 0 as a 13-bit timer
which consists of all 8 bits of TH0 and the lower 5 bits of TL0. As a result, the Timer 0
uses only 13 of 16 bits. How does it operate? Each coming pulse causes the lower
register bits to change their states. After receiving 32 pulses, this register is loaded and
automatically cleared, while the higher byte (TH0) is incremented by 1. This process is
repeated until registers count up 8192 pulses. After that, both registers are cleared andcounting starts from 0.
-
8/17/2019 Microprocessor Part2
62/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 8 of 22
Timer 0 in mode 1 (16-bit timer)
Mode 1 configures timer 0 as a 16-bit timer comprising all the bits of both registersTH0 and TL0. That's why this is one of the most commonly used modes. Timer operatesin the same way as in mode 0, with difference that the registers count up to 65 536 asallowable by the 16 bits .
Timer 0 in mode 2 (Auto-Reload Timer)
Mode 2 configures timer 0 as an 8-bit timer. Actually, timer 0 uses only one 8-bit
register for counting and never counts from 0, but from an arbitrary value (0-255) stored
in another (TH0) register.
-
8/17/2019 Microprocessor Part2
63/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 9 of 22
The following example shows the advantages of this mode. Suppose it is necessary to
constantly count up 55 pulses generated by the clock.
If mode 1 or mode 0 is used, It is necessary to write the number 200 to the timer
registers and constantly check whether an overflow has occurred, i.e. whether they
reached the value 255. When it happens, it is necessary to rewrite the number 200 and
repeat the whole procedure. The same procedure is automatically performed by the
microcontroller if set in mode 2. In fact, only the TL0 register operates as a timer, while
another (TH0) register stores the value from which the counting starts. When the TL0
register is loaded, instead of being cleared, the contents of TH0 will be reloaded to it.
Referring to the previous example, in order to register each 55th pulse, the best solution
is to write the number 200 to the TH0 register and configure the timer to operate in mode
2.
-
8/17/2019 Microprocessor Part2
64/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 10 of 22
Timer 0 in Mode 3 (Split Timer)
Mode 3 configures timer 0 so that registers TL0 and TH0 operate as separate 8-
bit timers. In other words, the 16-bit timer consisting of two registers TH0 and TL0 is split
into two independent 8-bit timers. This mode is provided for applications requiring an
additional 8-bit timer or counter. The TL0 timer turns into timer 0, while the TH0 timer
turns into timer 1. In addition, all the control bits of 16-bit Timer 1 (consisting of the TH1
and TL1 register), now control the 8-bit Timer 1. Even though the 16-bit Timer 1 can still
be configured to operate in any of modes (mode 1, 2 or 3), it is no longer possible to
disable it as there is no control bit to do it. Thus, its operation is restricted when timer 0 is
in mode 3.
The only application of this mode is when two timers are used and the 16-bit Timer 1 the
operation of which is out of control is used as a baud rate generator.
-
8/17/2019 Microprocessor Part2
65/84
Univers i ty of Techno logyElectrical Eng. DepartmentMicroprocessor Engin eering & Microcontrol ler
Lecture nine8051 Timer & Cou nterAs sist .Prof. Dr. Hadeel Nasrat
Page 11 of 22
How to 'read' a timer?
Depending on application, it is necessary either to read a number stored in the timer
registers or to register the moment they have been cleared.
It is extremely simple to read a timer by using only one register configured in mode 2
or 3. It is sufficient to read its state at any moment. That's all!
It is somehow complicated to read a timer configured to operate in mode 2. Suppose
the lower byte is read first (TL0), then the higher byte (TH0). The result is:
TH0 = 15 TL0 = 255
Everything seems to be ok, but the current state of the register at the moment of
reading was:
TH0 = 14 TL0 = 255
In case of negligence, such an error in counting (255 pulses) may occur for not so
obvious but quite logical reason. The lower byte is correctly read (255), but at the
moment the program counter was about to read the higher byte TH0, an overflow
occurred and the contents of both registers have been changed (TH0: 14 →15, TL0:
255 →0). This problem has a simple solution. The higher byte should be read first, thenthe lower byte and once again the higher byte. If the number stored in the higher byte is
different then this sequence should be repeated. It'