
Métrologie dimensionnelle de nanoparticules mesurées par ...

Annexe I 241
ANNEXE 1

242 Annexe I

A
nnex
e I
243
Tab
l. A
1. 1
: B
ilan
sur
les d
ispo
sitif
s de
mes
ure
exis
tant
(enr
obés
à fr
oid)
essa
i gr
ande
urs m
esur
ées
inte
rpré
tatio
n in
conv
énie
nts
test
de
man
iabi
lité
ESSO
(e
nrob
és à
froi
d)
Forc
e en
traîn
ant l
a ru
ptur
e du
mat
éria
u so
us
Cis
aille
men
t
Eval
uatio
n de
la m
ania
bilit
é d’
un e
nrob
é à
froi
d.
M
esur
e se
nsib
le a
u ty
pe d
’ém
ulsi
on, à
la d
urée
et à
la
vite
sse
du m
alax
age,
au
tem
ps d
e cu
re,
au c
ompa
ctag
e.
La fo
rce
mes
urée
n’e
st p
as u
ne g
rand
eur
intri
nsèq
ue a
u m
atér
iau
test
é
Essa
i des
truct
if.
man
iabi
limèt
re
NY
NA
S (e
nrob
és à
froi
d)
Forc
e en
traîn
ant
la ru
ptur
e du
mat
éria
u so
us c
isai
llem
ent
et c
ompr
essi
on
Eval
uatio
n de
la m
ania
bilit
é d’
un e
nrob
é à
froi
d.
M
esur
e se
nsib
le à
la te
neur
en
eau
tota
le, a
u do
sage
en
ém
ulsi
fiant
rési
duel
, à la
gra
nulo
mét
rie d
e l’é
mul
sion
, au
tem
ps d
e cu
re.
La fo
rce
mes
urée
n’e
st p
as u
ne g
rand
eur
intri
nsèq
ue a
u m
atér
iau
test
é
Es
sai d
estru
ctif.
Zone
de
mat
éria
u te
stée
non
hom
ogèn
e
Faib
le h
aute
ur d
e m
atér
iau
test
ée (5
cm
) com
pte
tenu
D
u fa
it qu
’elle
n’e
st p
as h
omog
ène.
Con
duct
imét
rie
(gra
ves é
mul
sion
de
bitu
me)
Con
duct
ivité
éle
ctriq
ue,
Cap
acité
G
rand
eurs
liée
s à la
var
iatio
n de
la m
obili
té d
es io
ns
dans
le m
ilieu
et à
la p
olar
isat
ion
inte
rfac
iale
sur l
es
gran
ulat
s (lié
e à
l’enr
obag
e).
Inte
rpré
tatio
n dé
licat
e.
Faib
le é
pais
seur
de
mat
éria
u ut
ilisé
e.
Dia
son
(end
uits
supe
rfic
iels
, co
ulis
bitu
min
eux)
Mes
ure
de l’
amor
tisse
men
t de
s osc
illat
ions
d’
un d
iapa
son.
Dét
erm
inat
ions
de
tem
ps d
e pr
ise
: T M
: te
mps
d’h
étér
oflo
cula
tion,
Tr
: te
mps
de
rupt
ure
inte
rgra
nula
ire,
Tp :
tem
ps d
e dé
but d
e m
atur
atio
n
Mes
ure
sens
ible
à la
gra
nula
rité
de l’
émul
sion
, à
son
pH, à
sa te
neur
en
émul
sifia
nt.
Gra
ndeu
r non
intri
nsèq
ue a
u m
atér
iau
In
terp
réta
tion
délic
ate.
Faib
le q
uant
ité d
e m
atér
iau
utili
sée.

244
Ann
exe
I
Tab
l. A
1. 2
: B
ilan
sur
les d
ispo
sitif
s de
mes
ure
exis
tant
(mat
éria
ux h
ydra
uliq
ues)
essa
i gr
ande
urs m
esur
ées
inte
rpré
tatio
n in
conv
énie
nts
tem
péra
ture
(b
éton
s)
Tem
péra
ture
Gra
ndeu
r lié
e au
deg
ré d
’hyd
rata
tion
du c
imen
t, si
l’on
su
ppos
e qu
’il n
’y a
qu’
une
seul
e ré
actio
n de
pris
e.
M
esur
e se
nsib
le à
: ad
juva
nts,
e/c,
te
mpé
ratu
re d
e co
ulée
…
Sa m
esur
e né
cess
ite d
es c
ondi
tions
adi
abat
ique
s par
faite
s. Pa
s d’in
terp
réta
tion
méc
aniq
ue d
irect
e.
trans
mis
sion
US
(bét
on d
urci
m
ortie
rs,
pâte
s de
cim
ent)
Vite
sse
de p
ropa
gatio
n d’
onde
s P o
u S,
am
ortis
sem
ent o
u én
ergi
e
Suiv
i de
la c
ompr
essi
bilit
é du
mat
éria
u.
Suiv
i de
l’am
ortis
sem
ent d
es o
ndes
par
le m
atér
iau.
D
étec
tion
de la
pha
se d
e pe
rcol
atio
n.
M
esur
e se
nsib
le à
: ad
juva
nts,
e/c,
tem
péra
ture
de
coul
ée…
Les m
esur
es d
’am
ortis
sem
ent o
u d’
éner
gie
ne
sont
pas
obj
ectiv
es.
Le
lien
dire
ct e
ntre
vite
sse
et c
ompr
essi
bilit
é n’
est e
ffec
tif
que
dans
le c
as d
e m
atér
iaux
pur
emen
t éla
stiq
ues.
Mes
ures
non
réal
isab
les s
ur b
éton
s fra
is.
O
ndes
S n
on m
esur
able
s ava
nt p
lusi
eurs
heu
res.
Po
ur le
s ess
ais a
vec
réfle
xion
, néc
essi
té d
e co
nnaî
tre
parf
aite
men
t les
pro
prié
tés d
es in
terf
aces
.
Fres
hCon
Dev
ice
(mor
tiers
, bét
ons)
Vite
sse
de p
ropa
gatio
n d’
onde
s P,
éner
gie
trans
mis
e,
fréq
uenc
es tr
ansm
ises
Dét
ectio
n de
la p
hase
de
perc
olat
ion.
Su
ivi d
e l’é
nerg
ie e
t des
fréq
uenc
es tr
ansm
ises
p
ar le
mat
éria
u.
M
esur
e se
nsib
le à
: ad
juva
nts,
e/c,
tem
péra
ture
de
coul
ée…
Les m
esur
es d
’éne
rgie
s tra
nsm
ises
ne
sont
pas
intrn
sèqu
es
au m
atér
iau
test
é.
Le
lien
dire
ct e
ntre
vite
sse
et c
ompr
essi
bilit
é n’
est e
ffec
tif
que
pour
des
mat
éria
ux p
urem
ent é
last
ique
s.
M
esur
es ré
alis
ées s
ur m
atér
iaux
don
t les
gra
nula
ts o
nt u
n di
amèt
re in
férie
ur à
4 m
m.
pris
omèt
re
ultra
sono
re
(pât
e de
cim
ent,
chau
x, p
lâtre
)
Mes
ure
d’un
éch
o U
ltras
onor
e D
étec
tion
de la
pha
se d
e pe
rcol
atio
n.
Mes
ure
non
intri
nsèq
ue :
la v
aleu
r obt
enue
pou
r l’é
cho
dépe
nd d
es c
ondi
tions
de
coup
lage
(mat
éria
u te
sté)
-(di
spos
itif)
.

Annexe I 245
Détermination de la célérité des ondes : Calcul automatique : Si ∆t est l’intervalle de temps nécessaire à une onde pour franchir la distance d séparant P2 et P3, la vitesse des ondes de compression s’obtient alors par la relation Cp=d/∆t. La détermination de la date d’arrivée des signaux sur un capteur n’est pas toujours évidente. Elle est réalisée de manière automatique par le logiciel LYNX, développé au sein du laboratoire, selon la méthode proposée par [Baer & Kradolfer, 1987]. Le signal est d’abord lissé avec une moyenne mobile sur trois points. Une fonction caractéristique, liée à la courbe enveloppe du signal, est ensuite calculée puis élevée au carré. En chaque point de la nouvelle fonction ainsi obtenue sont calculées une moyenne à court terme et une moyenne à long terme. Le début du signal est détecté lorsque la moyenne à court terme dépasse k fois la moyenne à long terme, k étant de l’ordre de 1,3. Calcul des incertitudes : Il est généralement admis que la fréquence d’échantillonnage doit vérifier fe > 2,6*fsignal pour obtenir une représentation correcte du signal, ce qui donne fe=2048 Hz pour une fréquence f = 800 Hz. Le système d’acquisition étant limité en nombre de points utilisables pour mémoriser le signal (8192 points en échelle temporelle), la fréquence d’échantillonnage maximale utilisable dépendra de la durée d’enregistrement du signal. Ainsi, pour fe=102,4 kHz, la durée d’enregistrement est de 31,25 ms, alors qu’elle est de 62,5 ms pour fe=51,2 kHz (fréquences d’échantillonnages disponibles les plus élevées, utilisées par [Thinet, 2000]). On évalue l’erreur commise sur la vitesse en fonction de fe au moyen de la relation dc/c=dl/l-d∆t/t, tirée de c=l/∆t (l : distance entre les capteurs P2 et P3, ∆t : temps nécessaire à l’onde pour parcourir cette distance). On en déduit les courbes d’erreur commise sur la détermination de la célérité : c+=c-dc et c-=c+dc. L’erreur sur la mesure de position vaut dl=1 mm. L’écart entre 2 points du signal enregistré vaut e=0,01526 ms pour fe=51,2 kHz et e=0,00382 ms pour fe=102,4 kHz. L’erreur majorée d∆t vaut alors 2.e, car il faut prendre en compte l’erreur commise sur chacun des deux capteurs.

246 Annexe I
Calcul des rapports de pression : Utilisation de la transformée de Fourrier : On utilisera dans cette partie des notations ainsi que différents résultats obtenus dans le §1.3.3 consacré à l’Analyse Inverse. - soit P(t) le signal enregistré par le capteur de pression (P2 ou P3) situé à une distance x de la plaque générant les signaux en compression. Soit l2 (respect. l3) la distance entre la plaque vibrante et le capteur P2 (respect. P3) - soit FFTP(ω) la transformée de Fourrier du signal émis au niveau de la plaque (x=0). - soit FFTP(ω,x) la transformée de Fourrier du signal reçu au niveau du capteur (x). On a alors : FFTP(ω,x)= FFTP(ω).exp(-ixω/C*(ω)) Dans cette expression, la vitesse est complexe : C*(ω) = Cr+i.Ci avec Cr = Co.cos(ϕ/2) ; Ci = Co.sin(ϕ/2) et donc |C*|² = C²r+C²i = C²o. ϕ représente ici la phase du module oedométrique (cf. §1.3.3). Co est une vitesse liée à la vitesse de l’onde en compression Cp par Co=Cp.cos(ϕ/2). On en déduit que : on peut donc calculer le rapport des modules des spectres de Fourrier : on obtient alors : on en déduit que :
( ) ( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −−⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −−=⎟⎠⎞
⎜⎝⎛ −−= Cr
ClliCi
Cll
ClliPFFT
PFFT ωωω 2*
232
*
23
*
23
2
3 exp*expexp
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −−= CiC
llPFFTPFFT ω2
*
23
2
3 exp
( )⎟⎠
⎞⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−−= 2tanexp 23
2
3 ϕωCp
llPFFTPFFT
)3.3.1.§(ln)(2arctan22
3
23cfP
Pllf
Cor p⎟⎟⎠
⎞⎜⎜⎝
⎛−
−= πϕ
( )2
323
2
3
2tan2
exp PFFTPFFT
Cpllf
PP =⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−
−= ϕπ

Annexe I 247
Méthode des ellipses de Lissajous : Notation : Φ représente ici un déphasage entre deux signaux sinusoïdaux (ne pas confondre avec ϕ, phase du module oedométrique). Soient P2 et P3 les signaux enregistrés par les capteurs du même nom. En écrivant que P2=A2.cos(ωt) et P3=A3.cos(ωt+Φ), on peut chercher à exprimer P3 en fonction de P2. Ainsi P3²/A3² = [(cos(ωt+Φ)]²=[cos(ωt).cos(Φ)-sin(ωt).sin(Φ)]² (a) = cos²(ωt).cos²(Φ)+sin²(ωt).sin²(Φ)-2.cos(ωt).cos(Φ).sin(ωt).sin(Φ) or (a) ⇒ sin(ωt) = [cos(ωt).cos(Φ)-P3/A3]/sin(Φ) d’où P3²/A3² = P²2/A²2.cos²(Φ)+(1- P²2/A²2) ).sin²(Φ)-2.P2/A2.cos(Φ).[P2/A2.cos(Φ)-P3/A3] = P²2/A²2.cos²(Φ)- P²2/A²2.cos²(Φ)- P²2/A²2.[sin²(Φ)+cos²(Φ)] +2.P2/A2.cos(Φ).P3/A3+sin²(Φ) On reconnaît l’équation d’une quadrique centrale du type XTAX+EX+f = 0 avec E=0 Le discriminant de A est δ = [1-cos²(Φ)] / (A2².A3²). Si Φ est différent de 0 [π], on a δ différent de zéro. On peut alors transformer (b) en l’équation suivante : λ1.x²+λ2.y²+f’=0 (c), où λ1 et λ2 représentent les valeurs propres de A. La quadrique étant centrée, on a f’=f. Il reste donc à calculer les valeurs propres de A. Le polynôme caractéristique s’écrit :
( )( ) ( )bAP
AP
AP
APet 0sincos2
2
3
3
2
22
3
3
2
2
2 =Φ−Φ⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
( )
( )⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
Φ−
Φ−
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
2332
3222
3
2
1cos
cos1
AAA
AAAAet
PP
X
( )
( )( )( )
23
22
2
23
222
332
3222
AAcos
A1
A1
A1
AAcos
AAcos
A1
Φ−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛λ−⎟
⎟⎠
⎞⎜⎜⎝
⎛λ−=
λ−Φ−
Φ−λ−
( ) 0AA
cos1A1
A1où'd 2
322
2
23
22
2 =Φ−+λ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+−λ
( ) ( )23
22
2
43
42
23
22
22
23
22 AA
2cos4A1
A1
AAcos1.4
A1
A1alorsaon −Φ++=Φ−−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+=∆

248 Annexe I
On en déduit que λ1*λ2 = 4.cos²(Φ) / (A2²A3²). Si λ1*λ2>0, l’équation étudiée (c) représente une ellipse. Si on note a et b les valeurs du demi grand axe et du demi petit axe de l’ellipse, on a alors : en posant Z = Y², on obtient : d’où : en élevant au carré et en posant u = (1+(a/b)²)² et v = ((a/b)²-1)², on obtient : Le logiciel HP3566a permet de tracer P3 en fonction de P2 et d’obtenir ainsi l’ellipse. Celle-ci étant centrée, on peut alors mesurer facilement a et b en se plaçant dans un repère en coordonnées polaires. Pour ce faire, on mesure les deux demi-grands axes et on en calcule la moyenne pour obtenir a. On fait de même pour b. On peut calculer Φ par la relation Φ=ω.∆t, ω étant la pulsation du signal et ∆t la différence entre les temps d’arrivée de l’onde sur P3 et P2, valeur mesurée lors du calcul de la célérité. Il suffit alors de résoudre l’équation du second degré (d). On obtient deux racines Z1 et Z2 dont il faut ensuite prendre la racine carrée pour obtenir les valeurs de Y=A3/A2. On a alors deux valeurs possibles pour A3/A2. Dans l’exemple traité (BB3), une seule des racines donnait des valeurs inférieures à 1 : le problème du choix ne s’est donc pas posé.
( ) ( )( ) ( ) ( )dvuvuZvuZ 0.2.2cos.2..2
=−+−Φ+−
2AA
2cos4A1
A1
A1
A1
:Adepropresvaleurslesoù'd23
22
2
43
42
23
22
2,1
−Φ++±+
=λ
( )2
3
2242
242
2
1
2cos.411
2cos.411 2
AAYavec
YYY
YYYba =
⎟⎠⎞⎜
⎝⎛ −Φ++−+
−Φ++++==
λ
λ
( ) ( ) ZZZZZZb
a .2cos.211.2cos.211.22
2
2
Φ++++=⎟⎟⎠
⎞⎜⎜⎝
⎛ Φ++−+
( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−+=⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛+Φ++ 1.11..2cos.21 2
2
2
22
b
aZb
aZZ

A
nnex
e I
249
Fig.
A1.
1 :
Obt
entio
n de
s gra
ndeu
rs r
héol
ogiq
ues p
ar a
naly
se in
vers
e : o
ndes
P e
t S
K
K
P 4/P
2
⎟⎟ ⎠⎞
⎜⎜ ⎝⎛
−+
+
++
=K
NZ
K
NZ
K
ϕϕ
βco
s.
*2
*
sin
.*
2*
arct
an
βϕ
sin
sin
.*
2*
*2
*N
ZK
NZ
++
=+
Cp,
P3/P
2
|K
+ Z
*|
Cs,
Ploi
n/Pp
rès
()
⎟⎟ ⎠⎞⎜⎜ ⎝⎛
⎟ ⎠⎞⎜ ⎝⎛
−−
=23
23
ln.ar
ctan
2PP
llC
p
ωϕ
⎟ ⎠⎞⎜ ⎝⎛
=+
+2
cos
*2
*2
2ϕ
ρp
CN
ZK
()
⎟⎟ ⎠⎞⎜⎜ ⎝⎛
⎟ ⎠⎞⎜ ⎝⎛
−−
=Pp
rès
Ploi
nlp
rès
lloinC
Sln.
arct
an2
ωψ
⎟ ⎠⎞⎜ ⎝⎛
=2
cos
*2
2ψ
ρC
N
⎟⎟ ⎠⎞
⎜⎜ ⎝⎛
−−
++
−+
+=
ψϕ
ψϕ
θco
s*
2co
s*
2*
sin
*2
sin
*2
*ar
ctan
NK
NZ
KN
NZ
K
θψ
ϕsi
nsi
n*
2si
n*
2*
NN
ZK
Z−
++
=
⎟⎟ ⎠⎞
⎜⎜ ⎝⎛
−+
+
−+
+=
ψϕ
ψϕ
ζco
s*
2co
s*
2*
sin
*2
sin
*2
*ar
ctan
NN
ZK
NN
ZK

250
Ann
exe
I
Fig.
A1.
2 :
Obt
entio
n de
s gra
ndeu
rs r
héol
ogiq
ues p
ar a
naly
se in
vers
e : o
ndes
P
K
|K+Z
*|
K
Cp,
P3/P
2
P 4/P
2 (
)⎟⎟ ⎠⎞
⎜⎜ ⎝⎛⎟ ⎠⎞
⎜ ⎝⎛−
−=
23
23
ln.ar
ctan
2PP
llC
p
ωϕ
⎟ ⎠⎞⎜ ⎝⎛
=+
+2
cos
*2
*2
2ϕ
ρp
CN
ZK
()
()2
2co
s*
2*
sin
*2
**
2*
KN
ZK
NZ
KN
Z−
++
++
+=
+ϕ
ϕ
⎟⎟ ⎠⎞
⎜⎜ ⎝⎛
+++
=*
2*
sin
*2
*ar
csin
NZ
NZ
Kϕ
β
**
ZK
Z+
≈
⎟⎟⎟ ⎠⎞
⎜⎜⎜ ⎝⎛−
−+
=*
2*
*ar
ccos
22
2
ZK
ZK
ZK
θ
⎟⎟ ⎠⎞
⎜⎜ ⎝⎛
+=
*si
n*
arcs
inZ
KZθ
ζ⎟⎟⎟ ⎠⎞
⎜⎜⎜ ⎝⎛
+−
++
+−
++
=ζ
ϕ
ζϕ
ψco
s.
*co
s.
*2
*
sin
.*
sin
.*
2*
arct
anZ
KN
ZK
ZK
NZ
K
ψζ
ϕsi
nsi
n.
*si
n.
*2
**
2Z
KN
ZK
N+
−+
+=

Annexe II 251
ANNEXE 2

252 Annexe II

Annexe II 253
Méthode de calcul des MBE : (tabl. A2.1) Le calcul d’un MBE se ramène à une détermination de surface développée. Dans tout ce qui suit, les granulats seront modélisés par des particules parfaitement sphériques, de manière à simplifier le calcul des surfaces et des volumes (vi=π.(di)3/6, si=π.di²). Les notations utilisées sont celles proposées dans la présentation générale de la méthode ([Projet National CALIBE, 1999]). La première étape consiste à réaliser les courbes granulométriques des graviers et sables utilisés au moyen des tamis normalisés suivants : 20 / 16 / 12,5 / 10 / 8 / 6,3 / 5 / 4 / 3,15 / 2,5 / 1,25 / 0,63 / 0,315 / 0,16 / 0,08 mm. Le calcul, effectués pour 1m3 de béton, se décompose ensuite en :
• calcul du nombre de particules moyennes dans la tranche granulaire i • calcul du volume de la particule moyenne de chaque classe granulaire i • calcul du volume de granulat dans chaque classe granulaire i • calcul de la surface développée par les particules de chaque tranche granulaire i • calcul de la surface développée totale • dosage en sable correcteur
Soient TMi et Tmi les tailles des mailles des tamis supérieurs et inférieurs définissants une tranche granulaire i. Soient RMi et Rmi les refus associés (en %) à ces tamis. Dans chaque classe granulaire i, le diamètre de la particule moyenne di est donné par la taille moyenne des mailles des tamis : di = (Tmi+TMi)/2. Le volume de cette particule, supposée sphérique, est donc vi=π.(di)3/6. La masse de granulat dans chaque tranche granulaire est donnée par : Mi = (Rmi-RMi).g/100, où g représente le dosage dans le béton du granulat considéré (en kg, pour 1m3). Le volume de granulat Vi contenu dans la tranche i est alors obtenu par Vi=Mi/ρ, où ρ représente la masse volumique des granulats. Le nombre de particules moyennes Ni dans une tranche granulaire i est donné par Ni=Vi/vi. La surface développée d’une telle particule (sphérique) valant si=π.di², on en déduit la valeur de la surface développée par les particules de la tranche granulaire i par : Si=Ni.si. Pour calculer la surface développée totale des granulats étudiés (SD), il suffit alors de sommer les différentes valeurs obtenues pour chaque classe granulaire : SD=ΣSi. En utilisant la méthode décrite ci-dessus, on calcule la surface développée du gravier présent dans le béton, puis celle reprise par 1 kg de sable. On en déduit alors la quantité de sable correcteur qu’il faut rajouter pour remplacer le gravier. Il suffit pour cela d’écrire que le sable correcteur et le gravier doivent générer la même surface développée. La correction en sable sera réalisée au moyen du même sable que celui utilisé pour réaliser le béton. Sa surface sera évaluée par la même méthode que celle utilisée pour le gravier du béton.

254 Annexe II
Tabl. A2. 1: Exemple de feuille de calcul d’un MBE
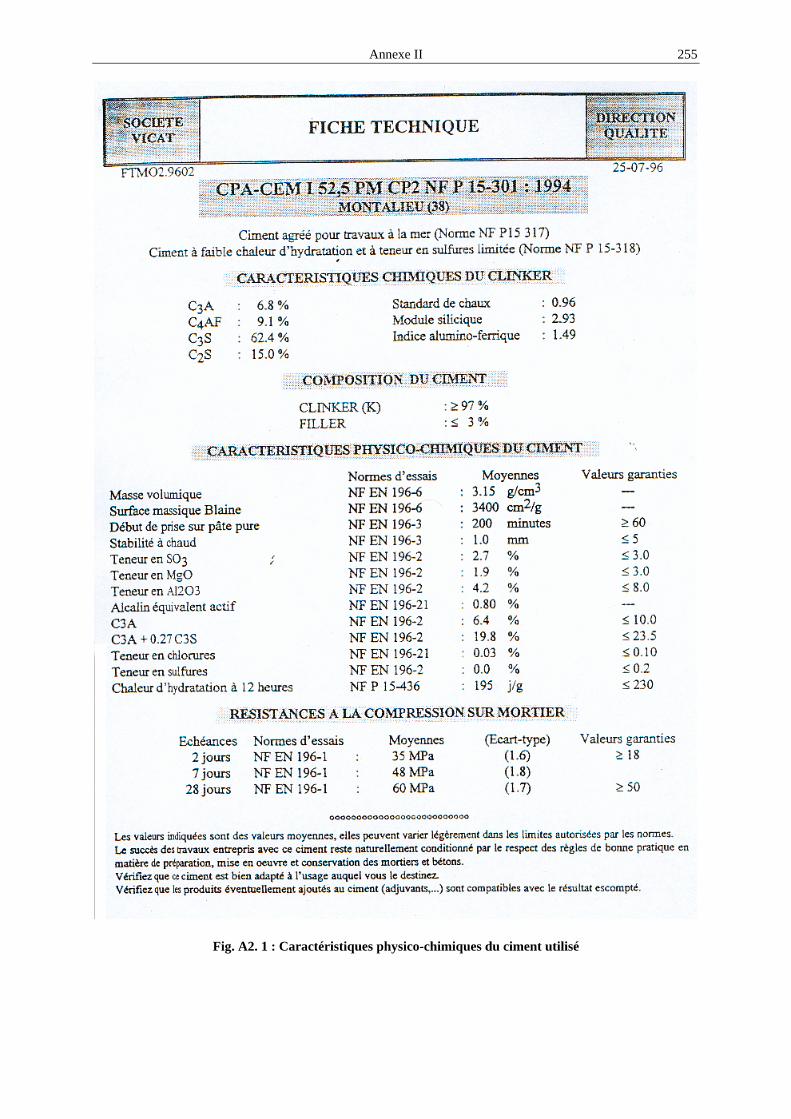
Annexe II 255
Fig. A2. 1 : Caractéristiques physico-chimiques du ciment utilisé

256 Annexe II
Fig. A2. 2 : Notice technique du PLASTIMENT 97

Annexe II 257
Fig. A2. 3 : Notice technique du SIKA RETARDER

258 Annexe II
Fig. A2. 4 : Notice technique du SIKA AER 5

Annexe II 259
Fig. A2. 5 : Sable utilisé pour les bétons

260 Annexe II
Fig. A2. 6 : Gravier utilisé pour les bétons

A
nnex
e II
26
1
Fig.
A2.
7 :
Evo
lutio
n de
la n
orm
e du
mod
ule
de c
isai
llem
ent |
N*|
(cam
pagn
e B
T)
1,0E
+06
1,0E
+09
2,0E
+09
3,0E
+09
4,0E
+09
5,0E
+09
6,0E
+09
7,0E
+09
8,0E
+09
9,0E
+09
060
120
180
240
300
360
420
480
540
600
660
tem
ps (m
in)
|N*| PaBT
2 : B
60-2
0BT
3 : B
55A2
-19
BT4
: B60
R4-1
8BT
5 : B
50P4
-22
BT6
: B50
P5-1
9BT
7 : B
45P4
-21
BT8
: B45
-21
1,0E+
06
5,1E+
07
1,0E+
08
1,5E+
08
2,0E+
08
2,5E+
08
060
120
180
240
300
360
tem
ps (m
in)
|N*| Pa

262
Ann
exe
II
Fig.
A2.
8 :
Evo
lutio
n de
la n
orm
e du
mod
ule
de c
isai
llem
ent |
N*|
(cam
pagn
e M
T)
1,00
E+07
1,01
E+09
2,01
E+09
3,01
E+09
4,01
E+09
5,01
E+09
6,01
E+09
7,01
E+09
060
120
180
240
300
360
420
480
540
600
660
720
tem
ps (m
in)
|N*| Pa
MT2
: M
60-2
6
MT3
: M
55A2
-24
MT4
: M
60R
4-24
MT5
: M
50P4
-25
MT6
: M
50P5
-24
1,00
E+07
6,00
E+07
1,10
E+08
1,60
E+08
2,10
E+08
2,60
E+08
060
120
180
240
300
360
tem
ps (m
in)
|N*| Pa

A
nnex
e II
26
3
Fig.
A2.
9 :
Evo
lutio
n de
l’an
gle
de p
hase
ψ d
u m
odul
e de
cis
aille
men
t (ca
mpa
gne
BT
)
0102030405060708090
060
120
180
240
300
360
420
480
540
600
660
tem
ps (m
in)
ψ (°)
BT2
: B60
-20
BT3
: B55
A2-1
9BT
4 : B
60R
4-18
BT5
: B50
P4-2
2BT
6 : B
50P5
-19
BT7
: B45
P4-2
1BT
8 : B
45-2
1

264
Ann
exe
II
Fig.
A2.
10
: Evo
lutio
n de
l’an
gle
de p
hase
ψ d
u m
odul
e de
cis
aille
men
t (ca
mpa
gne
MT
)
(en
hach
uré
: val
eurs
non
réa
liste
s)
-30
-20
-100102030405060708090
060
120
180
240
300
360
420
480
540
600
660
720
tem
ps (m
in)
psi (°)
MT2
: M
60-2
6
MT3
: M
55A2
-24
MT4
: M
60R
4-24
MT5
: M
50P4
-25
MT6
: M
50P5
-24

Annexe III 265
ANNEXE 3

266 Annexe III

Annexe III 267
Calcul de la teneur en eau d’un enrobé à froid en fonction de la profondeur : Compte tenu du fait que le front d’évaporation est horizontal et qu’il se déplace depuis le haut (zone de séchage) vers le bas, seule la côte de profondeur z interviendra dans les calculs. L’absence de drainage significatif permet de négliger l’action des forces de pesanteur. L’ensemble des notations utilisées sont présentées sur la fig. A3.1.
Fig. A3. 1 : Notations utilisées
Fig. A3. 2 : Hauteur de la zone 2 (flèches : remontées d’eau)
La zone 1 correspond à une zone sèche. Sa teneur en eau est W1=0%. La zone 2 est la zone diffusionnelle, dans laquelle l’eau peut remonter par capillarité vers la zone 1, pour s’y évaporer. Sa teneur en eau est W2. En appelant hc la hauteur maximale des remontées capillaires (hc=4,5 cm), l’épaisseur de la couche 2 peut alors être prise comme approximativement égale à 1,5.hc (fig. A3.2 : elle est en réalité généralement comprise entre hc et 2.hc, sauf en début de séchage où elle est inférieure à hc). La zone 3, quant à elle, correspond à la zone à teneur en eau initiale (W3=Wini). L’eau y est supposée répartie de manière homogène. Les granulats sont supposés répartis de manière homogène dans les trois couches.
hc 2hc
Me=masse d’eau totale Mei=masse d’eau de la zone i MG=masse de granulats totale MGi= masse de granulats de la zone i W=teneur en eau moyenne Wi=teneur en eau dans la zone i Wini=teneur en eau initiale
zone 1
zone 2
zone 3
z
ht
h2
h1
h3

268 Annexe III
Si l’on se donne, dans un premier temps, les épaisseurs respectives des différentes couches (h1, h2 et h3), il est alors possible de modéliser la répartition de l’eau dans l’éprouvette. Les zones 1 et 3 étant connues, le problème se ramène à la détermination de la répartition de l’eau dans la zone 2. Afin de ne pas compliquer la modélisation, nous supposerons que la teneur en eau augmente linéairement avec la profondeur z. On a donc dans la couche 2, avec h=z-h1 : W2(h) = α.h + β. Le profil des teneurs en eau étant continu, il faut nécessairement avoir
W2(0)=0 et W2(h2)=W3=Wini. D’où l’on déduit que : 2
2 .)( hWhhW ini=
Pour calculer l’épaisseur des différentes couches, il suffit alors d’écrire que : Me=Me1+Me2+Me3. On utilisant le fait que les granulats sont répartis de manière homogène, on obtient alors : Me1 = 0 Me2 = <W2(h)> * MG2 = (Wini/2) * MG * (h2/ht) Me3 = Wini * MG * h3/ht
On en déduit que : 2. 23
hhtWiniWh −=
On a alors et h1 = ht - h2 - h3, avec h2 = 1,5 * hc. Pour une teneur en eau donnée, le calcul revient donc à calculer les épaisseurs h1, h2 et h3. Connaissant ces épaisseurs, il devient ensuite facile de calculer la teneur en eau en tout point de l’éprouvette. On peut également en déduire l’évolution des teneurs en eau à une profondeur donnée, objet du calcul. Remarques : Ce calcul ne donne cependant qu’une valeur approchée de W(z) à cause du profil choisi pour les teneurs en eau de la zone de transition (profil linéaire) et du fait que l’épaisseur h2 est supposée constante et égale à 1,5*hc. La masse d’eau contenue dans l’éprouvette ainsi modélisée ne représente la masse réelle que dans la mesure où l’épaisseur de la phase 3 peut être modulée pour modifier la répartition de l’eau. Le calcul n’est donc pas réalisable en début et en fin de séchage. Il faut en effet que h2 + h3 ≤ ht et h3 ≥ 0, d’où :
htWinihhtWht
Winih .2.222 ⎟⎠⎞
⎜⎝⎛ −≤≤
Dans le cas de l’éprouvette 16*32 de l’essai GEB10, cela conduit à n’utiliser le calcul précédent que pour 0,8% ≤ W ≤7 ,2%, avec Wini=8%, ht = 31,2 cm et h2=1,5.hc = 6,57 cm.

A
nnex
e II
I 26
9
Fig.
A3.
3 :
Evo
lutio
n du
rap
port
de
pres
sion
P4/P
2 (ef
fet P
oiss
on) e
n fo
nctio
n de
la te
neur
en
eau
0,0
0,2
0,4
0,6
0,8
1,0
02
46
810
12
tene
ur e
n ea
u (%
)
P4/P2G
EB
1 : G
53-4
,2-5
,9-1
GE
B3
: G56
-4,4
-5,9
-1G
EB
6 : G
77-4
,2-6
,2-4
GE
B8
: G64
-4,2
-6,2
-3G
EB
9 : G
69-6
,9-6
,1-3
GE
B10
bas
: G
64-4
,2-8
-3G
EB
11 :
G67
-0-1
2,1-
3
tem
ps
form
ulat
ion
sans
bitu
me
GEB

270 Annexe III
Modélisation de l’émulsion par une suspension de deux types d’inclusions simples : Modélisation : Dans cette modélisation, on considère deux types de particules noyées dans leur milieu homogène équivalent. On suppose qu’il n’y a aucune interaction entre les deux types de particules, si bien que le calcul revient en fait à dissocier ce qui se passe pour chaque particule puis à combiner les résultats ainsi obtenus en fonction des proportions de chaque inclusion.
Calculs :
Le calcul consiste tout d’abord à obtenir les champs de déplacement d’une inclusion simple enrobée dans un milieu homogène et soumise à l’infini à un champ de déplacement de glissement simple, du type : ur = 1/2.γ.r.sin²(θ).cos(2.ϕ), uθ = 1/2.γ.r.sinθ.cosθ.cos(2.ϕ), uϕ = 1/2γ.r.sin(θ).sin(2.ϕ). Compte tenu de la symétrie sphérique et de la loi de comportement choisie pour les matériaux considérés, les déplacements dans l’inclusion peuvent être mis sous la forme : ur = Ur(r).sin²(θ).cos(2.ϕ) uθ = Uθ(r).sinθ.cosθ.cos(2.ϕ) uϕ = Uϕ(r).sin (θ).sin(2.ϕ) avec : Ur = A1.r - 6.ν/(1-2.ν).A2.r3 + 3.A3/r4 + (5-4.ν)/(1-2.ν).A4/r2 Uθ = A1.r - (7-4.ν)/(1-2.ν).A2.r3 - 2.A3/r4 + 2.A4/r2 Uϕ = - Uθ Pour le milieu homogène, les déplacement ont également la même forme que pour l’inclusion : il suffit de remplacer les Ai des expressions précédentes par des Bi associés aux milieu homogène et de prendre les bonnes valeurs pour les ν de chaque phase. En écrivant la continuité des contraintes et des déplacements au niveau de l’interface inclusion-milieu homogène, et en tenant compte du fait qu’il ne doit pas y avoir de singularité dans l’inclusion en r = 0 (A3 = A4 = 0), il vient alors pour l’inclusion A2 = 0 et ε = A1, avec : où νm et µm sont les coefficients de Poisson et le module de cisaillement du milieu homogène Considérons à présent le cas des deux inclusions. Celles-ci ont respectivement pour concentration volumique, champ de déformation et de contrainte : ci, εi, σi. Soient ε et σ les
(I)
( )( ) ( ) mmim
mmA
µυµυ
γµυ
..57..54.22..1.15
1
−+−
−=

Annexe III 271
grandeurs associées au milieu homogène. La sollicitation appliquée étant du cisaillement pur, il vient : σ = c1.σ1 + c2.σ2, σ1 = µ1.ε1, σ1 = µ2.ε2, σ =µ . ε et ε = c1.ε1 + c2.ε2. On en déduit que : µ = (c1.µ1.ε1 + c2.µ2.ε2)/(c1.ε1 + c2.ε2).
Avec ( )m
m
ννβ −
−= 1.15.54.2 , il vient :
(1-β).µ2 + [β.(c1.µ2 + c2.µ1) - (1-β).(c1.µ1 + c2.µ2)].µ - β.µ1.µ2 = 0 En prenant pour l’évolution de νm un profil du type νm = (ν1 - ν2).c1 + ν2, on peut alors calculer β et en déduire les valeurs du module de cisaillement µ.

272 Annexe III
Tentative de modélisation avec inclusion tricomposite et inclusion simple d’air :
Calcul de l’inclusion composite : fig. A3.4
Compte tenu de la symétrie sphérique et de la loi de comportement retenue pour les constituants et pour le matériau homogène, on peut utiliser le champ de déplacement précédemment présenté (I). Pour le cas particulier de l’inclusion centrale (gravier), on a nécessairement à nouveau A2=A3=0 pour que le champ soit défini en r=0. Pour obtenir les champs du bitume, de l’émulsion et du milieu homogène, il suffit de substituer aux paramètres Ai les paramètres associées aux milieux correspondant et de mettre les bonnes valeurs pour les ν de chaque phase. Notons Bi les paramètres du bitume, Ci ceux de l’émulsion et Di ceux du milieu homogène. En écrivant :
• la continuité des déplacements sur les interfaces, • la continuité des contraintes sur les interfaces, • le fait que l’énergie de déformation du milieu homogène doit être identique à celle du
modèle de la fig. A3.4 lorsqu’il n’y a pas d’inclusion (ce qui revient à écrire que D4=0 : [Christensen & Lo, 1979]),
on obtient un système de 12 équations à 12 inconnues (les Ai, Bi, Ci, Di), paramétré par les modules de cisaillement et les coefficients de Poisson des différents constituants et du milieu homogène. Ce système peut être mis sous forme matricielle (fig. A3.6).
Fig. A3. 4 : Modélisation de l’inclusion composite
Si l’on souhaite éviter la solution triviale correspondant à l’annulation de l’ensemble des Ai, Bi, Ci, Di, il faut nécessairement écrire que le déterminant de la matrice est nul, ce qui conduit à l’obtention d’une équation du second degré en µ*. Il devient alors possible de calculer le module de cisaillement du milieu homogène équivalent.
a
c
milieu 1
milieu 3
milieu 2
milieu homogène
b
milieu homogène
bitume
émulsion
granulat

Annexe III 273
Prise en compte de l’air : On peut à présent reconsidérer le cas présenté sur la fig. A3.5. Un calcul analogue à celui utilisé pour le modèle à trois inclusions permet alors d’obtenir le module de cisaillement du matériau global.
Fig. A3. 5 : Modélisation au moyen de trois inclusions
Continuité des déplacements en r=a : Continuité des déplacements en r=b : Continuité des déplacements en r=c :
= − A1 6ν1 A2 a2
− 1 2 ν1 − + + B1 6
ν2 B2 a2
− 1 2 ν23
B3
a5( ) − 5 4 ν2 B4
( ) − 1 2 ν2 a3
= − A1( ) − 7 4 ν1 A2 a2
− 1 2 ν1 − − + B1
( ) − 7 4 ν2 B2 a2
− 1 2 ν22
B3
a52
B4
a3
= − + + B1 6ν2 B2 b2
− 1 2 ν23
B3
b5( ) − 5 4 ν2 B4
( ) − 1 2 ν2 b3 − + + C1 6
ν3 C2 b2
− 1 2 ν33
C3
b5( ) − 5 4 ν3 C4
( ) − 1 2 ν3 b3
= − − + B1( ) − 7 4 ν2 B2 b2
− 1 2 ν22
B3
b52
B4
b3 − − + C1( ) − 7 4 ν3 C2 b2
− 1 2 ν32
C3
b52
C4
b3
= − + + C1 6ν3 C2 c2
− 1 2 ν33
C3
c5( ) − 5 4 ν3 C4
( ) − 1 2 ν3 c3 + + D1 3D3
c5( ) − 5 4 ν D4
( ) − 1 2 ν c3
= − − + C1( ) − 7 4 ν3 C2 c2
− 1 2 ν32
C3
c52
C4
c3 − + D1 2
D3
c52
D4
c3
bitume
milieu homogène
air
émulsion
granulat

274
Ann
exe
III
Con
tinui
té d
es c
ontra
inte
s en
r=a
: C
ontin
uité
des
con
train
tes e
n r=
b :
Con
tinui
té d
es c
ontra
inte
s en
r=c
:
=
+
21λ1
A2a2
µ22
µ1⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
A1
18ν1
A2a2
−
12
ν1µ2
+
−
−
−
λ2⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
21
B2a2
6B4 a3
µ22
B136
ν2B2
a2
−
12
ν224
B3 a54
()
−
54
ν2B4
()
−
12
ν2a3
=
µ1⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
A1
()
+
72
ν1A2
a2
−
12
ν1µ2
−
+
+
B1(
) +
7
2ν2
B2a2
−
12
ν28
B3 a52
()
+
1ν2
B4
()
−
12
ν2a3
=
+
λ2⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
21
B2b2
6B4 b3
µ32
µ2⎛ ⎝⎜ ⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ ⎟ −
−
−
B1
18ν2
B2b2
−
12
ν212
B3 b52
()
−
54
ν2B4
()
−
12
ν2b3
µ3 +
−
−
−
λ3⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
21
C2b
26
C4
b3
µ32
C1
36ν3
C2b
2
−
12
ν324
C3
b54
()
−
54
ν3C
4
()
−
12
ν3b3
=
µ2⎛ ⎝⎜ ⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ ⎟ −
+
+
B1
()
+
72
ν2B2
b2
−
12
ν28
B3 b52
()
+
1ν2
B4
()
−
12
ν2b3
µ3 −
+
+
C
1(
) +
7
2ν3
C2
b2
−
12
ν38
C3 b5
2(
) +
1
ν3C
4
()
−
12
ν3b3
=
+
−
−
−
λ3⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
21
C2
c26
C4 c3
µ32
C1
36ν3
C2
c2
−
12
ν324
C3 c5
4(
) −
5
4ν3
C4
()
−
12
ν3c3
− +
6
λD
4
µ3c3
2
µ⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ −
−
D
112
D3 c5
2(
) −
5
4ν
D4
()
−
12
νc3
µ3
=
−
+
+
C1
()
+
72
ν3C
2c2
−
12
ν38
C3 c5
2(
) +
1
ν3C
4
()
−
12
ν3c3
µ⎛ ⎝⎜ ⎜ ⎜
⎞ ⎠⎟ ⎟ ⎟ +
+
D
18
D3 c5
2(
) +
1
νD
4
()
−
12
νc3
µ3

A
nnex
e II
I 27
5
mat
éria
u i :
νi,
µ i
mili
eu h
omog
ène
: ν, µ
N
i=1/
(1-2
.νi)
θij=
µi/µ
j (7
-4.ν
i)/(1
-2.ν
i)=5.
Ni+
2 λ i
/µi=
2.ν i
/(1-2
.νi)=
Ni-1
(7
+2.ν
i)/(1
-2.ν
i)=8.
Ni-2
x=
µ/µ 3
(5
-4.ν
i)/(1
-2.ν
i)=3.
Ni+
2 λ i
/µj=
λ i/µ
i.µi/µ
j=(N
i-1).θ
ij 2.
(1+ν
i)/(1
-2.ν
i)=3.
Ni-2
ρ 1
=a/b
=(V
1/(V
1+V
2))^
(1/3
)
ρ 2
=b/c
=((V
1+V
2)/(V
1+V
2+V
3))^
(1/3
)
Fig.
A3.
6 :
Mod
élis
atio
n av
ec in
clus
ion
com
posi
te (m
atri
ce e
t not
atio
ns)
-1
3.(N
1-1)
.ρ1²
1 -3
.(N2-
1).ρ
1² 3.
ρ 1-5
(3
.N2+
2).ρ
1-3
0 0
0 0
0 0
-1
(5.N
1+2)
.ρ1²
1 -(
5.N
2+2)
.ρ1²
-2.ρ
1-5
2.ρ 1
-3
0 0
0 0
0 0
-2.θ
12
-3.θ
12. (
N1-
1).ρ
1² 2
3.(N
2-1)
.ρ1²
-24.
ρ 1-5
-2
.(9.N
2+1)
.ρ1-3
0 0
0 0
0 0
-θ12
θ 1
2.(8.
N1-
1).ρ
1² 1
-(8.
N2-
1).ρ
1² 8.
ρ 1-5
(3
.N2-
1).ρ
1-3
0 0
0 0
0 0
0 0
1 -3
.(N2-
1)
3 3.
N2+
2 -1
3.
(N3-
1).ρ
22 -3
.ρ2-5
-(
3.N
3+2)
.ρ2-3
0
0 0
0 1
-(5.
N2+
2)
-2
2 -1
(5
.N3+
2).ρ
22 2.
ρ 2-5
-2
.ρ2-3
0
0 0
0 2.
θ 23
3.(N
2-1)
. θ23
-2
4.θ 2
3 -2
.(9.N
2+1)
.θ23
-2
-3.(N
3-1)
.ρ22
24.ρ
2-5
2.(9
.N3+
1).ρ
2-3
0 0
0 0
θ 23
-(8.
N2-
1). θ
23
8.θ 2
3 (3
.N2-
1). θ
23
-1
(8.N
3-1)
.ρ22
-8.ρ
2-5
-(3.
N3-
1).ρ
2-3
0 0
0 0
0 0
0 0
1 -3
.(N3-
1)
3 (3
.N3+
2)
-1
-3
0 0
0 0
0 0
1 -(
5.N
3+2)
-2
2
-1
2 0
0 0
0 0
0 2
3.(N
3-1)
-2
4 -2
.(9.N
3+1)
-2
.x
24.x
0
0 0
0 0
0 1
-(8.
N3-
1)
8 3.
N3-
1 -x
-8
.x

276 Annexe III
Evolution du modèle : proportions des différentes phases.
Le modèle qui vient d’être présenté va évoluer en fonction du temps par l’intermédiaire des pertes d’eau mesurées. Pour faciliter les calculs, il faut néanmoins faire des hypothèses sur la répartition de l’eau et du bitume dans la grave émulsion :
• l’eau sera supposée entièrement contenue dans l’émulsion (en réalité, elle peut être enclose dans les dépôts de bitume ou autour des granulats)
• l’émulsion est supposée conserver constante sa teneur en bitume tout au long de la prise. En réalité, cette concentration augmente, mais la loi de dépôt du bitume au cours du temps n’est pas connue.
Le calcul s’effectue donc de la manière suivante : Notations : tb : teneur en bitume en %, w : teneur en eau en % tbe : teneur massique en bitume de l’émulsion (masse de bitume dans l’émulsion/masse d’émulsion) mg, mw, mb : masses de granulats secs, d’eau et de bitume en kg Vb : volume de bitume total en kg/m3 Vbe, Vwe : volumes de bitume et d’eau dans l’émulsion en kg/m3 Vg,Vb Ve : volumes de granulats secs, de bitume et d’émulsion en kg Vt : volume total (avec l’air) en kg ρb, ρw, ρg : masse volumique du bitume, de l’eau et des granulats secs en kg/m3
• on calcule la teneur massique initiale en bitume de l’émulsion (mb/(mb+me)) avec les quantités réelles de bitume (mb) et d’eau (me) introduites dans le mélange. Cette concentration permet de calculer la valeur du module viscoélastique de cisaillement de l’émulsion par homogénéisation autocohérente (§3.4.3).
• à chaque instant, on mesure la teneur en eau du matériau testé (w). Toute l’eau étant dans l’émulsion et sa proportion étant supposée constante, on en déduit les volumes d’eau (Vwe=w/100*mg/ρw) et de bitume (Vbe=tbe/(1-tbe)*ρw/ρb*Vwe) de l’émulsion.
• connaissant le volume total de bitume (Vb=tb/100*mg/ρb), on en déduit le volume de bitume enrobant les granulats (Vb-Vbe).
• connaissant le volume de granulats introduits (Vg=mg/ρg), on peut alors calculer les rapports volumiques utilisés pour le calcul de l’inclusion composite : ρ1=(Vg/(Vg+Vb))^(1/3) et ρ2=((Vg+Vb)/(Vg+Vb+Ve))^(1/3).
• connaissant le volume total du matériau (Vt : mesuré dans le caisson du Vibroscope), ainsi que les volumes de granulat, de bitume et d’eau, on peut en déduire la compacité de la grave émulsion de bitume à chaque instant ((Vg+Vb+Ve)/Vt) et donc les concentrations volumiques des deux types d’inclusions : air et sphère tricomposite.

Annexe III 277
le calcul final des deux inclusions air+tricomposite nécessite de connaître le coefficient de Poisson du matériau global homogène. Dans la mesure où cette valeur n’est pas clairement connue, elle sera évaluée à partir des mesures réalisées à chaque instant au moyen du Vibroscope. On a alors ν*=0,5.λ*/(λ*+µ*), avec λ*=K+Z* et µ*=N*. Modélisation de la grave émulsion de bitume au moyen de trois inclusions : De manière analogue à ce qui a exposé pour l’émulsion (modèle à deux inclusions simples), on peut écrire que : µ = (c1.µ1.ε1 + c2.µ2.ε2 + c3.µ3.ε3)/(c1.ε1 + c2.ε2 + c3.ε3).
Avec ( )m
m
ννβ −
−= 1.15.54.2 , il vient :
(1 - β)2.µ3 + (β.(µ1 + µ2 + µ3) - (c1.µ1 + c2.µ2 + c3.µ3)).(1-β).µ2 + (β.(µ1µ3 + µ1µ2 + µ2µ3) - (µ1µ3.(c1 + c3) + µ1µ2.(c1 + c2) + µ2µ3.(c2 + c3)).β.µ - β2.µ1.µ2.µ3 = 0 où les ci, µi représentent les concentrations volumiques et modules de cisaillement des trois inclusions. On peut alors calculer le module de cisaillement global µ*. L’évolution du modèle en fonction de la teneur en eau et le calcul de νm sont réalisés de manière analogue à ce qui a été fait précédemment (cf. inclusion tricomposite et inclusion simple d’air).

278 Annexe III


















