Mesoscale Models of Interface Mechanics in Crystalline ...features, labeled here as mesoscale...
36
ARL-RP-0625 ● MAY 2018 US Army Research Laboratory Mesoscale Models of Interface Mechanics in Crystalline Solids: A Review by JD Clayton Reprinted from J Mater Sci. 2018;53:5515–5545. Approved for public release; distribution is unlimited.
Transcript of Mesoscale Models of Interface Mechanics in Crystalline ...features, labeled here as mesoscale...

ARL-RP-0625 ● MAY 2018
US Army Research Laboratory
Mesoscale Models of Interface Mechanics in Crystalline Solids: A Review
by JD Clayton
Reprinted from J Mater Sci. 2018;53:5515–5545.
Approved for public release; distribution is unlimited.

NOTICES
Disclaimers The findings in this report are not to be construed as an official Department of the Army position unless so designated by other authorized documents.
Citation of manufacturer’s or trade names does not constitute an official endorsement or approval of the use thereof.
Destroy this report when it is no longer needed. Do not return it to the originator.

ARL-RP-0625 ● MAY 2018
US Army Research Laboratory
Mesoscale Models of Interface Mechanics in Crystalline Solids: A Review by JD Clayton Weapons and Material Research Directorate, ARL Reprinted from J Mater Sci. 2018;53:5515–5545. Approved for public release; distribution is unlimited.

ii
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188
Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing the burden, to Department of Defense, Washington Headquarters Services, Directorate for Information Operations and Reports (0704-0188), 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302. Respondents should be aware that notwithstanding any other provision of law, no person shall be subject to any penalty for failing to comply with a collection of information if it does not display a currently valid OMB control number. PLEASE DO NOT RETURN YOUR FORM TO THE ABOVE ADDRESS.
1. REPORT DATE (DD-MM-YYYY)
May 2018 2. REPORT TYPE
Reprint 3. DATES COVERED (From - To)
July 2016–January 2018 4. TITLE AND SUBTITLE
Mesoscale Models of Interface Mechanics in Crystalline Solids: A Review 5a. CONTRACT NUMBER
5b. GRANT NUMBER
5c. PROGRAM ELEMENT NUMBER
6. AUTHOR(S)
JD Clayton 5d. PROJECT NUMBER
5e. TASK NUMBER
5f. WORK UNIT NUMBER
7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
US Army Research Laboratory ATTN: RDRL-WMP-C Aberdeen Proving Ground, MD 21005
8. PERFORMING ORGANIZATION REPORT NUMBER
ARL-RP-0625
9. SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES)
10. SPONSOR/MONITOR'S ACRONYM(S)
11. SPONSOR/MONITOR'S REPORT NUMBER(S)
12. DISTRIBUTION/AVAILABILITY STATEMENT
Approved for public release; distribution is unlimited.
13. SUPPLEMENTARY NOTES Reprinted from J Mater Sci. 2018;53:5515–5545.
14. ABSTRACT
Theoretical and computational methods for representing mechanical behaviors of crystalline materials in the vicinity of planar interfaces are examined and compared. Emphasis is on continuum-type resolutions of microstructures at the nanometer and micrometer levels, i.e., mesoscale models. Grain boundary interfaces are considered first, with classes of models encompassing sharp interface, continuum defect (i.e., dislocation and disclination), and diffuse interface types. Twin boundaries are reviewed next, considering sharp interface and diffuse interface (e.g., phase field) models as well as pseudo-slip crystal plasticity approaches to deformation twinning. Several classes of models for evolving failure interfaces, i.e., fracture surfaces, in single crystals and polycrystals are then critically summarized, including cohesive zone approaches, continuum damage theories, and diffuse interface models. Important characteristics of compared classes of models for a given physical behavior include complexity, generality/flexibility, and predictive capability versus number of free or calibrated parameters.
15. SUBJECT TERMS
interfaces, crystals, mechanics, grain boundaries, twin boundaries, fracture surfaces
16. SECURITY CLASSIFICATION OF: 17. LIMITATION OF ABSTRACT
UU
18. NUMBER OF PAGES
36
19a. NAME OF RESPONSIBLE PERSON
JD Clayton a. REPORT
Unclassified b. ABSTRACT
Unclassified c. THIS PAGE
Unclassified 19b. TELEPHONE NUMBER (Include area code)
(410) 278-6146 Standard Form 298 (Rev. 8/98)
Prescribed by ANSI Std. Z39.18

INTERFACE BEHAVIOR
Mesoscale models of interface mechanics in crystalline
solids: a review
J. D. Clayton1,2,3,*
1Department of Civil Engineering and Engineering Mechanics, Columbia University, New York, NY 10027, USA2 A. James Clark School of Engineering, University of Maryland, College Park, MD 20742, USA3 Impact Physics, US ARL, Aberdeen, MD 21005-5066, USA
Received: 14 June 2017
Accepted: 18 September 2017
Published online:
4 October 2017
� Springer Science+Business
Media, LLC 2017
ABSTRACT
Theoretical and computational methods for representing mechanical behaviors
of crystalline materials in the vicinity of planar interfaces are examined and
compared. Emphasis is on continuum-type resolutions of microstructures at the
nanometer and micrometer levels, i.e., mesoscale models. Grain boundary
interfaces are considered first, with classes of models encompassing sharp
interface, continuum defect (i.e., dislocation and disclination), and diffuse
interface types. Twin boundaries are reviewed next, considering sharp interface
and diffuse interface (e.g., phase field) models as well as pseudo-slip crystal
plasticity approaches to deformation twinning. Several classes of models for
evolving failure interfaces, i.e., fracture surfaces, in single crystals and poly-
crystals are then critically summarized, including cohesive zone approaches,
continuum damage theories, and diffuse interface models. Important charac-
teristics of compared classes of models for a given physical behavior include
complexity, generality/flexibility, and predictive capability versus number of
free or calibrated parameters.
Introduction
Interfaces may have a profound effect on the physical
responses of solid materials subjected to various
external stimuli or environmental conditions. This
article is focused on crystalline solid materials sub-
jected to mechanical loading [1–3]. In particular,
material classes considered herein may be single
crystals or polycrystals, comprised of grains of
metallic, ceramic, molecular, and/or mineralogical
origin. In order to maintain a reasonable scope, not
considered in this article are polymers and polymer
composites, though it is acknowledged that interfa-
cial mechanics is often crucial to the local and global
responses of these classes of materials as well [4, 5].
An interface is defined herein as a planar boundary
between two regions of a solid across which physical
Invited review article for Special Issue of Journal of Materials Science.
Address correspondence to E-mail: [email protected]; [email protected]
https://doi.org/10.1007/s10853-017-1596-2
J Mater Sci (2018) 53:5515–5545
Interface Behavior

properties and/or response characteristics vary sub-
stantially. Local behaviors of the material in the
immediate vicinity of such an interface may also vary
from that of bulk regions of crystal far from the
boundary on either side. Examples of interface types
that may exist prior to deformation or mechanical
loading include grain [6] and subgrain boundaries,
twin boundaries, andphase boundaries. Those that are
often induced by loading include fracture surfaces [7],
stacking faults, and shear bands [8]. Grain and twin
boundaries may also be deformation induced, as in
cases of grain subdivision during plastic deformation
[9] or deformation twinning [10, 11].
This paper is focused on modeling techniques,
including theory and methods of solution, both ana-
lytical and numerical. Experiments are mentioned at
times in supporting discussion, e.g., in the context of
model validation, but this paper does not critically
examine experimental methods. The scope is limited
to continuum models that resolve microstructural
features, labeled here as mesoscale models. Length
scales resolved span approximately tens of nanome-
ters to millimeters, with micrometers the primary
scale of most representations discussed herein. Not
addressed are atomic scale theories [12, 13], or cou-
pled atomic-continuum models [14–17] which tend to
focus on somewhat finer scales of resolution. General
classes of models include sharp interface theories,
whereby jumps in properties and/or field variables
exist across internal boundaries, and diffuse interface
theories, wherein some smoothing or continuous
interpolation of properties and/or response functions
is invoked across an interface [18]. The overall scope
of this paper is thought to be unique in terms of the
ensemble of topics and their comparisons. An
attempt to sufficiently mention relevant works in
each area is made, but inclusion of even a modest
fraction of the vast number of historical and recent
articles on any broad subject is currently impossible
for a review paper of any reasonably finite length,
especially when one considers prolific publishing
practices in contemporary fundamental sciences.
Later in this work, for each kind of represented
physics—grain boundaries, twin boundaries, failure
boundaries—the corresponding classes of models are
compared with regard to flexibility, complexity, and
predictive capability. Flexibility, i.e., generality, refers
to the ability of a model to represent a breadth of
physical behaviors without adjustment of its funda-
mental governing equations. Complexity of a theory
is rather self-explanatory, with availability of ana-
lytical solutions and ease of numerical implementa-
tion both tending to decrease with increasing
complexity. The viewpoint adopted here is that a
given theory or model is considered more predictive
than another if it equally or better represents
observed physics with fewer calibrated parameters
[19–21].
This paper is organized as follows, noting that as is
the case with nearly any review, the present subject
matter deals with topics of the author’s own experi-
ence. The ‘‘Grain boundaries’’ section addresses grain
boundaries in polycrystals, including sharp interface,
continuum defect, and diffuse interface or phase field
representations. The ‘‘Twinning’’ section covers twin
boundaries, again considering sharp interface and
phase field models as well as pseudo-slip theories for
deformation twinning. The ‘‘Failure and localization’’
section describes fracture and localization models in
single crystals and polycrystals: cohesive zone
methods, continuum damage models, and regular-
ized failure models such as those of phase field type.
Fractures may be transgranular or intergranular, with
spall fractures potentially falling into either category.
The ‘‘Discussion’’ section summarizes major features
of the approaches including their strengths and
weaknesses according to the author’s viewpoint.
Although this review is biased more toward gen-
eral themes than intensive derivations, inclusion of
key mathematical relations for theories and methods
of solution is necessary for the intended rigorous
evaluation. Notation of continuum physics is invoked
in such instances, where vectors and tensors are
written in bold italic font, and scalars and scalar
components in italic font. Occasionally, the index
notation is used for clarity, with summation implied
over repeated indices. Further details regarding
notation will be clear from context.
Grain boundaries
Prior to discussion of specific classes of models in the
context of mechanical response, some universal fea-
tures and requisite notation for a grain boundary
(GB) are introduced. Useful references for further
study are [22, 23].
Superscripts in parentheses are used to denote
grain numbers in a polycrystal, where such a number
runs from 1 to the total number of crystals within the
5516 J Mater Sci (2018) 53:5515–5545

body. Denote by XðgÞ the volume occupied by grain g,
prior to deformation. Let X denote the position vector
of a material point in the body, again prior to defor-
mation induced by loading, and referred to a fixed
Cartesian reference frame. Let oXðgÞ denote the
external boundary of a crystal, which may include
free surfaces and/or grain boundaries (GBs). The
boundary between two grains with numbers g1 and
g2 is denoted by oXðg1;g2Þ, and so forth.
Bravais lattice vectors ai, where i ¼ 1; 2; 3, are
assigned to each single crystal and are assumed
uniform in each crystal volume, i.e.,
aiðXÞ ¼ aðgÞi 8X 2 XðgÞ: ð2:1Þ
By definition, the Bravais lattice is discontinuous
across (misoriented) grain boundaries. Let a0i denote
a particular set of the Bravais lattice vectors referred
to a given coordinate frame. Then, the orientation of
the crystal lattice in any grain is related to these
vectors via the orientation matrix GðgÞ:
aðgÞi ¼ GðgÞa0i : ð2:2Þ
The misorientation matrix for any two crystals with
grain numbers g1 and g2 is defined as
Mðg1;g2Þ ¼ ðGðg1ÞÞ�1Gðg2Þ: ð2:3Þ
Orientation matrices and misorientation matrices are
all proper orthogonal, i.e., each has equal transpose
and inverse, with a determinant of value þ1. Such
matrices can be represented in terms of an angle uand axis of rotation r of unit magnitude. For a generic
misorientation matrix M with entries MIJ
(I; J ¼ 1; 2; 3), the angle and components of the axis
are calculated as follows [23]:
cosu ¼ 1
2ðM11 þM22 þM33 � 1Þ; ð2:4Þ
r1 ¼M23 �M32; r2 ¼M31 �M13; r3 ¼M12 �M21:
ð2:5Þ
Often later in this article, the term misorientation will
be used to refer to the magnitude juj, where it is
understood that a complete description of the geo-
metric relation between orientations of the two lat-
tices of the same crystal structure requires the axis r
as well. Furthermore, it is noted that a complete
description of a planar interface requires five inde-
pendent scalar parameters; the misorientation matrix
or angle/axis pair each supplies only three. For
example, a complete characterization of a GB orien-
tation can be achieved via specification of the direc-
tion cosines of the boundary plane in the coordinate
systems of each neighboring grain along with the
angle of twist of both plane stacks normal to the
boundary plane [23].
The coincident site lattice (CSL) model of GBs
[6, 24] will be used in some later descriptions. For a
certain misorientation across a GB, or between two
interpenetrating lattices, some fraction of lattice sites
will coincide, forming a periodic sublattice. The CSL
parameter R is defined as the reciprocal density of
coinciding sites. Boundaries associated with low
values of R are of high interest since special physical
properties are often a result [23]. The use of the grain
boundary character distribution to design polycrys-
talline materials with optimum physical properties
has been suggested [25]. However, a low R value
does not always correlate with GB strength [26].
The maximum deviation from an exact CSL usually
is taken to correspond to the angular limit for a low-
angle boundary: juj ¼ 15�. Thus, a low-angle
boundary is described as R1. Annealing twin
boundaries are a subset of R3 boundaries. An
empirical relationship between maximum angular
deviation um of an arbitrary GB from any exact CSL
with value R is um ¼ u0R�1=2, where u0 is the afore-
mentioned maximum deviation, typically 15� [6, 23].
The jump in any field variable or material property
AðXÞ, which could be a scalar, vector, or higher-order
tensor, is defined as the difference between its values
at two corresponding locations Xð1Þ and Xð2Þ:
sAðXð1Þ;Xð2ÞÞt ¼ AðXð2ÞÞ � AðXð1ÞÞ: ð2:6Þ
The jump across a (sharp) grain boundary corre-
sponds to the difference in limiting values of A as X
approaches the shared point on boundary from either
side. In this work, attention is restricted to coherent
interfaces in the undeformed reference configuration,
meaning sXt ¼ 0. Later, in the ‘‘Failure and localiza-
tion’’ section, surfaces of discontinuity such as frac-
tured interfaces will be discussed, but these are
assumed to be induced by loading or deformation
from a coherent reference state.
Sharp interface models
In what is termed herein as a sharp interface model of
a GB, properties of crystals in the immediate vicinity
of the boundary are identical to those in the interior
J Mater Sci (2018) 53:5515–5545 5517

of each crystal, far from the interface. Therefore,
according to (2.3) and (2.6), the lattice vectors will
demonstrate a discrete jump across the GB for any
nontrivial misorientation matrix between the two
grains:
sait ¼ aðg2Þi � a
ðg1Þi ¼ ½Gðg2Þ � Gðg1Þ�a0i
¼ Gðg1Þ½Mðg1;g2Þ � 1�a0i on oXðg1;g2Þ:ð2:7Þ
The identity tensor is denoted by 1. The difference in
orientation of the lattice across the boundary can
induce various local physical responses when the
aggregate is subjected to far-field mechanical loading,
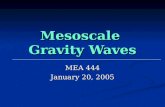
temperature change, and so forth. A geometric rep-
resentation of a sharp interface discretization of a
polycrystal is shown on the left side of Fig. 1, where
individual crystals are polyhedral shaped and GBs
are faceted (flat) planar surfaces. Such representa-
tions are characteristic of modern finite element
simulations of crystal elasticity [27, 28] and crystal
plasticity [26, 29].
This work will deal with potentially large strains
and rotations, as may occur during deformation of
ductile metals [3, 26], and even in ceramics and
minerals when loading is predominantly compres-
sive [31, 32]. Governing equations from finite elas-
ticity and plasticity of crystals are now reviewed to
lend context to the discussion of interfacial mechan-
ics. Only essential theoretical relations are provided,
and Cartesian coordinates are implied when index
notation is invoked. For a more comprehensive
treatment of finite crystal elastoplasticity that also
encompasses curvilinear coordinate representations,
see [3]. Two other useful references, albeit primarily
limited to finite anisotropic elasticity, are [33, 34].
Spatial coordinates of the deformed solid are rela-
ted to material coordinates by the time-dependent
motion
x ¼ xðX; tÞ ¼ X þ uðX; tÞ; ð2:8Þ
with u the displacement vector. The deformation
gradient is, with r0ð�Þ the referential gradient,
F ¼ r0x ¼ FEFP: ð2:9Þ
Thermoelastic and plastic deformations are FE and
FP, respectively. The plastic velocity gradient is the
sum of contributions of slip rates _ca, where the
superscript denotes a slip system for dislocation glide
with direction sa and plane normal ma:
LP ¼ _FPFP�1 ¼X
a
_casa �ma: ð2:10Þ
Here the slip direction and slip plane normal are
orthogonal and of unit length, i.e., are those of the
crystal lattice prior to thermoelastic deformation. The
thermoelastic strain used in standard crystal hyper-
elasticity [33] is the Green strain tensor:
E ¼ 1
2ðFEÞTFE � 1h i
; EIJ ¼1
2ðFEkIFEkJ � dIJÞ:
ð2:11Þ
The thermoelastic volume change is measured by
JE ¼ detFE. Cauchy stress r is related to elastic sec-
ond Piola–Kirchhoff stress S via
Figure 1 Geometric rendering of polycrystal with grain boundaries (GBs) represented as sharp interfaces: without secondary GB phase
(left); with secondary GB phase (right) [30].
5518 J Mater Sci (2018) 53:5515–5545

r ¼ 1
JEFESðFEÞT; rij ¼
1
JEFEiKSKLF
EjL: ð2:12Þ
The thermoelastic stress–strain relation is
SIJ ¼ CIJKLEKL þ1
2!CIJKLMNEKLEMN
þ 1
3!CIJKLMNPQEKLEMNEPQ þ � � � � vIJDT � � � � ;
ð2:13Þ
where CIJKL��� are isothermal elastic constants of sec-
ond and higher orders, DT is temperature change
measured from a reference state, and vIJ are thermal
stress coefficients related to elastic constants and
thermal expansion coefficients via vIJ ¼ CIJKLaKL. A
free energy function per unit volume in the ther-
moelastically unloaded configuration is
w ¼ wðE;T; fngÞ; ð2:14Þ
with fng a set of internal state variables that affect the
energy stored in the crystal, e.g., dislocation density.
The viscoplastic flow rule for slip rates is of the
general form
_ca ¼ _caðsa;T; fngÞ; sa ¼ JEr : ½FEsa � ðFEÞ�Tma�:ð2:15Þ
The resolved shear stress acting on a system is sa. Thelocal balance of energy, in the absence of point heat
sources, can be cast as the following temperature rate
equation:
c _T ¼X
a
sa _ca � owofng � T
o2woTofng
� �f _ng � Tv : _E
þ �r � ðK �rTÞ ¼ bX
a
sa _ca � Tv : _Eþ �r � ðK �rTÞ;
ð2:16Þ
where c is the specific heat at constant thermoelastic
strain, the rightmost term accounts for heat conduc-
tion (see e.g., [3, 21] for details), and b is the fraction
of plastic work converted to heat energy, i.e., the
fraction of stored energy of cold work is 1� b.Let C denote any of the tensors of elastic moduli in
(2.13). These elastic constants, which are the usual
second-order type as well as third- and fourth-order
constants important in high-pressure applications
[31, 33, 35, 36], depend on the orientation of the
crystal lattice in the reference configuration, as do the
slip directors and slip plane normal vectors:
CðXÞ¼C½aiðXÞ�¼C½GðXÞ�; saðXÞ¼sa½aiðXÞ�¼sa½GðXÞ�;maðXÞ¼ma½aiðXÞ�¼ma½GðXÞ�:
ð2:17Þ
Similarly, thermal stress coefficients v and thermal
conductivity K also depend on crystal orientation in
the unloaded state for Lagrangian thermoelasticity.
Functional forms of material coefficients for various
crystal classes are available in [3, 33, 34].
In the present context of fully coherent GBs, and in
the absence of any transgranular separation modes,
continuity of displacement and traction in grain
interiors and/or along GBs is stated mathematically
as
suðX; tÞt ¼ 0 , sxðX; tÞt ¼ 0;
ð8X 2 XðgÞ and 8X on oXðg1;g2ÞÞ;ð2:18Þ
stt ¼ srtn ¼ 0; ð8Xðx; tÞon oXðg1;g2ÞÞ: ð2:19Þ
In the traction continuity equation (2.19), n is normal
to the surface, and it is assumed that shock waves
(i.e., stress jumps in solid dynamics) are absent.
Consider a general boundary value problem for a
polycrystal, where traction and/or displacement are
imposed along the far-field (external) boundary. The
continuity equations in (2.18) and (2.19) impose
restrictions on the solution strain and stress fields E
and r. In the present sharp interface representation,
the jump conditions on the lattice vectors in (2.7) lead
to jumps in elastic constants and slip director/normal
vectors in (2.17). It is these potentially drastic changes
in local properties, taken in combination with the
continuity constraints for coherent sharp GBs, that
may give rise to concentrated stress, strain, and/or
slip activity in the vicinity of GBs in solutions to
general polycrystal boundary value problems [37].
The propensity for statistically more pronounced
stress concentrations at GBs and triple point junctions
(i.e., where three GBs intersect) has been predicted in
finite deformation crystal plasticity simulations
[29, 38].
Lattice mismatch does not necessarily preclude
development of continuous bands, across GBs, of
homogeneous or localized field variables such as
plastic strain, temperature, and/or dislocation den-
sity (when modeled as an internal variable depend-
ing on cumulative slip), as demonstrated in early
[39, 40] and more recent [41] finite element simula-
tions of shear banding in polycrystals. Preferential
lattice orientations may promote localized slip bands
J Mater Sci (2018) 53:5515–5545 5519

in isothermal simulations [39, 40], whereas the com-
bination of temperature rise from (2.16) in conjunc-
tion with increased slip activity due to thermal
activation if included in (2.15) will promote adiabatic
shear banding [8]. As is evident from Fig. 2, correla-
tion between dissipation fraction b, dislocation den-
sity n, and local strain and temperature
concentrations has been predicted in mesoscale
crystal plasticity simulations [41].
The earliest finite element simulations of finite
(poly)crystal plasticity appeared in the early to mid-
1980s [42]. Thereafter, transmission and/or blockage
of slip at special (CSL R9 and R17b) high-angle
boundaries in copper have been studied via compu-
tational crystal plasticity and sharp interface repre-
sentations of GBs [43]; reported results are in general
qualitative agreement with experimental trends
relating dislocation pile ups and suggested pending
fracture mechanisms.
Although typically less prone than most metals to
plastic deformation from dislocation glide, ceramics
and minerals also demonstrate concentrated ther-
moelastic strain and stress concentrations due to
lattice mismatch at GBs. A relatively early numerical
study of stress concentrations in polycrystals with
sharp interface GB representations is [44], which
considers elastic anisotropy and anisotropic thermal
expansion coefficients and concludes that anisotropy
Figure 2 Predicted strain localization in Al polycrystal at applied tensile strain of 8%: plastic strain, temperature, heat dissipation fraction
b, and dislocation density [41].
Figure 3 Tilt boundary (left) comprised of edge dislocations
(center) or partial disclination dipoles (right) [3, 53].
5520 J Mater Sci (2018) 53:5515–5545

of either property may affect statistical distributions
of tractions at GBs. This study will also be referred to
later in the ‘‘Failure and Localization’’ section in the
context of failure models, since it includes results
incorporating cohesive fracture elements at GBs for
some simulations. An important physical feature of
many industrial ceramics is the presence of sec-
ondary, often glassy, phases of impurities at GBs
[30, 45]. In a sharp interface model, such phases can
be introduced via a thin layer of secondary material
between crystals as shown on the right side of Fig. 1.
In summary, sharp interface representations of GBs
allow for explicit modeling of strain and stress con-
centrations of field variables near mismatched inter-
faces. No additional constitutive model parameters
are required beyond those invoked for the response
of the bulk material in grain interiors. The approach
is considered physically realistic for modeling con-
tinuum thermoelasticity since thermoelastic proper-
ties and hardness tend to vary little from points near
the GB to points far in the grain interior [46]. In
contrast, properties associated with dissipative phe-
nomena, including dislocation nucleation and motion
in ductile crystals, may vary strongly in the vicinity
of GBs, as will be discussed more in the ‘‘Continuum
dislocation and disclination models’’ section. Fur-
thermore, since no intrinsic length scale exists in
classical crystal elasticity and plasticity theories, the
sharp interface models that invoke classical bulk
constitutive laws are unable to predict size effects
such as Hall–Petch-type behavior (i.e., strength
increases as grain size decreases).
The preceding treatment is focused on stationary
grain boundaries. Depending on thermomechanical
loading conditions, the mobility of GBs becomes
important, for example under conditions pertinent to
grain growth, recrystallization, or some kinds of
phase transformations. Sharp interface models of
surfaces of strain discontinuity and phase bound-
aries—including geometric, kinematic, thermody-
namic, and kinetic aspects—were advanced in the
late twentieth century in several seminal works
[47–49].
Continuum dislocation and disclinationmodels
Grain boundaries, particularly those of low angle
type (i.e., R1), often contain high densities of dislo-
cations depending on the material and processing
history. As shown on the left side of Fig. 3, a tilt
boundary with misorientation magnitude u can be
represented in terms of a density of edge dislocations
of like sign and Burgers vector magnitude b, with
spacing h given by [50]
h ¼ b=u; ðu.u0 ¼ p=12Þ: ð2:20Þ
To a certain extent, the larger the misorientation, the
more closely spaced the dislocations, leading to an
overall higher density (line number per unit area).
However, the maximum misorientation is limited to
around 15� in this model since high-angle grain
boundaries are not well represented physically by
large dislocation densities. The low-angle boundaries
represented in such cases may be present in the
undeformed (poly)crystal, or may be induced by
severe plastic deformation [9].
Yield behavior has been observed in indentation
experiments to vary with distance from GBs in met-
als, with such dependency varying with orientation
mismatch [46]. Boundaries may act as sources or
sinks for dislocation generation and interactions.
Furthermore, slip transmission or blockage may
ensue depending on alignment of slip systems across
a GB [43]. Early continuum models accounting for
different plastic properties near GBs versus grain
interiors treated each crystal as a composite material
with a boundary layer of properties differing from
those of the bulk [37, 51]. More recent computational
models have incorporated rules for GB slip interac-
tions via specialized interfacial finite elements along
grain or subgrain boundaries [26, 52].
The GB dislocations concentrated at interfaces
between severely deformed crystals, which are
required to maintain compatibility of the total
deformation gradient field, account for the incom-
patibility (i.e., failure of integrability or anholonomic
character [54–57]) of the thermoelastic and plastic
deformations individually in (2.9). The spatial den-
sity tensor of geometrically necessary dislocations
(GNDs) is, in coordinate free tensor notation [3, 57]
�qG ¼ � �C : e ¼ � �T : e ¼ �fFE½rðFE�1Þ�g : e; ð2:21Þ
where e is the permutation tensor, �C is the integrable
crystal connection whose curvature tensor vanishes
identically, and �T is the torsion tensor of this con-
nection. The spatial gradient operator is rð�Þ. Sincethe GND tensor in (2.21) does not account for distri-
butions of dislocations whose net Burgers vector
vanishes, a scalar density of statistically stored
J Mater Sci (2018) 53:5515–5545 5521

dislocations (SSDs), qS, is also introduced. Let qG be
the frame invariant GND tensor mapped to the
elastically unloaded intermediate configuration
[3, 57–59], a tensor which can equivalently be con-
structed from the transformation of (2.21) or the
material gradient of FP. Then, the state variable list
for the crystal plasticity constitutive model entering
the free energy and/or flow rule in (2.14) and (2.15)
is, for the present class of models,
fng ¼ fqG; qSg: ð2:22Þ
The flow rule is supplemented with a kinetic equa-
tion for the rate of change of qS, which generally
tends to increase with cumulative plastic slip. Model
parameters are needed to scale the magnitude of the
contribution of GNDs to stored energy and harden-
ing behaviors. Similarly, parameters are required to
quantify contributions of SSDs to stored energy and
slip resistance. A common practice involves use of an
effective shear modulus and scalar Burgers vector to
provide the correct units for normalization. It is
understood that (2.22) must be extended if slip sys-
tems harden unequally (i.e., different self- and latent
hardening), in which case dislocation densities rele-
vant to each system may become distinct state vari-
ables [52].
Inclusion of the GND density tensor in the consti-
tutive model provides a regularizing effect on
numerical solutions due to the presence of the gra-
dient term [i.e., rðFE�1Þ] in (2.21). Size effects can be
predicted using this class of models if properly cali-
brated; for example, such models may depict
increased strength under indentation with a decrease
in indenter size, or Hall–Petch-type behavior (essen-
tially, smaller ¼ stronger) [26]. In simulations of
polycrystals, GNDs tend to build up in the vicinity of
grain boundaries, thereby quantifying intergranular
incompatibility and physically representing pile ups
and increased hardness in such regions [26, 52].
Boundary conditions supplementing those of classi-
cal crystal plasticity are required for solution of
boundary value problems, e.g., the thermoelastic or
plastic deformation gradient may need to be specified
over some part of the external boundary of the
domain. A recent novel scheme for numerical repre-
sentation of grain boundaries in polycrystals via
smoothed jumps of local lattice rotation in the refer-
ence state is described in [60].
A more sophisticated class of elastic–plastic models
intended to capture physics of initial and/or evolving
boundaries of lattice misorientation in crystals sup-
plements the dislocation (GND and SSD) description
with disclinations. Dislocations are fundamental
translational defects, while disclinations are funda-
mental rotational defects, so the latter perhaps more
naturally should be used to represent rotations of the
lattice across boundaries of misorientation. As shown
on the right side of Fig. 3, the mean spacing l of
defects in a tilt boundary represented by a density of
parallel partial wedge disclination dipoles of strength
x and dipole radius r is
l ¼ 2rx=u: ð2:23Þ
The magnitude of misorientation is u, not necessarilyrestricted to small angles. This disclination descrip-
tion credited to Li [61] is an alternative to the Read–
Shockley model of (2.20). With r and x fundamental
constant properties of the crystal lattice associated
with a particular material (i.e., rotational analogs of
b), (2.23) suggests a generally increasing density of
disclinations per unit area with increasing misorien-
tation in the vicinity of grain boundaries.
In the context of finite deformation continuum field
theories of elastic–plastic crystal mechanics, a spatial
tensor of disclination density �h is defined as [3, 53, 62]
�h ¼ � 1
4ðR : eÞ : e; R ¼ RðC;rCÞ; C ¼ �Cþ Q:
ð2:24Þ
In differential-geometric language [56, 57, 63], R is the
fourth-order curvature tensor that depends on the
connection coefficients of C and spatial gradients of
these coefficients. The latter total connection C con-
sists of the sum of the crystal connection defined in
(2.21) and the micro-rotation variable Q, which
physically represents lattice rotation gradients [62].
When Q vanishes, the curvature tensor and the
disclination density tensor also vanish. The spatial
GND density is constructed as in (2.21), but with �Creplaced with C. The list of state variables entering
the free energy function and flow rule is extended to
include disclination density mapped to the interme-
diate configuration h, i.e.,
fng ¼ fqG; qS; hg: ð2:25Þ
The list may be further augmented to include a scalar
density of statistically stored disclinations with
5522 J Mater Sci (2018) 53:5515–5545

vanishing average Frank vector [3, 53], but such a
description is not essential in the present context.
Continuum dislocation–disclination field theory
has been used to describe a hierarchy of cellular
microstructures in ductile metallic crystals under
severe plastic deformation [9, 53]. In this context,
low-angle misorientations across cell walls at a rela-
tively small length scale, termed incidental disloca-
tion boundaries, are resolved by GNDs. Disclinations
resolve potentially higher angle misorientations
across larger cell blocks separated by geometrically
necessary boundaries. The disclination concept
thereby introduces another length scale for regular-
ization into the theory and in conjunction with GNDs
enables a natural description of microstructure evo-
lution at different scales.
The theory of [3, 53], thought to be the first ther-
modynamically complete constitutive framework for
continuum dislocation–disclination mechanics at
finite strain, includes a set of microscopic equilibrium
equations, that in combination with kinematic rela-
tions between lattice spin and disclination density,
enable prediction of the evolution of Q in an incre-
mental boundary value problem. Numerical solu-
tions of this formidable set of equations, which
inevitably include entities from Riemannian and non-
Riemannian geometry, remain elusive to date due to
complexity. Furthermore, parameters are required
that specify how free energy and slip resistance may
depend on disclination density. Linear [3, 61] and
nonlinear [64] elastic solutions for discrete defects
offer insight into energies contributed by disclina-
tions in certain arrangements, but unique assignment
of parameters for hardening due to GNDs, SSDs, and
disclinations remains problematic and highly mate-
rial dependent.
In contrast, more recent work has obtained
numerical solutions for dislocation–disclination field
theory applied to grain boundaries and triple junc-
tions in metals [65], albeit with the constitutive theory
restricted to the geometrically linear regime. A finite
deformation description of the kinematics of GBs in
relatively brittle minerals (i.e., low dislocation
mobility) invoking a disclination density tensor has
also been exercised [66].
A final concept is of importance when describing
regions of very large defect density using continuum
mechanical concepts. In such cases, the two term
multiplicative decomposition of (2.9) may be
insufficient when FP is attributed to dislocation slip
processes alone as implied in (2.10). An intermediate
term, denoted here by FI , augments the classical
crystal plasticity decomposition, accounting for
residual lattice deformation due to defects within the
local volume element of crystalline material at X to
which F is ascribed:
F ¼ r0x ¼ FEFIFP: ð2:26Þ
The particular form of FI depends on the class of
defect, defect arrangement, and scale of resolution. A
tensor equation for FI has been derived via homog-
enization (i.e., volume averaging) methods for poly-
crystals [29] and single crystals containing subgrain
boundaries [59]. Elsewhere it has been calculated via
consideration of the linear elastic fields of periodic
arrays of edge dislocations [67, 68]. Solutions also
exist for a volume element containing a single edge or
screw dislocation [69, 70]. Representations in terms of
nonlinear elasticity and anharmonic molecular statics
have also been derived [3, 71], the former invoking
third order elasticity of cubic crystals [72].
Analytical calculations have demonstrated the
importance of inclusion of FI in the constitutive
description when dislocation densities approach the
theoretical maximum, an occurrence possible in
regions of crystal near boundaries induced during
severe plastic deformation or shock loading [70, 73].
In particular, since FP is isochoric when attributed
solely to slip, any residual volume changes in the
crystal are omitted if not captured by FI . Further-
more, lattice rotations induced by disclinations may
be described by rotational part of FI [53], and volume
changes associated with point defects may be inclu-
ded in its determinant [62, 74]. If included in a con-
stitutive model framework, an evolution equation or
one of the aforementioned subscale solutions for FI
must be invoked. Though not essential, the residual
lattice deformation may be included in the list of state
variables fng, in which case additional model
parameters may be needed to relate it to stored
energy and strain hardening kinetics, for example.
In summary, the classical sharp interface descrip-
tion invoked in crystal plasticity simulations, as
presented in the ‘‘Sharp interface models’’ section,
can be augmented to explicitly account for defect
densities in the vicinity of GBs and subgrain bound-
aries. Potential benefits of the model classes covered
here in the ‘‘Continuum dislocation and disclination
J Mater Sci (2018) 53:5515–5545 5523

models’’ section include physical flexibility, where
size effects and microstructure evolution at different
resolutions can be incorporated somewhat naturally.
Regularization associated with higher-order gradient
terms in the free energy and balance or kinetic laws
may facilitate mesh-size independence of numerical
solutions, an issue which is of particular importance
for modeling localization phenomena. A drawback is
that additional parameters must be prescribed and
often calibrated rather than determined from first
principles, especially those relating defect densities to
slip kinetics. Enhanced kinematics and stored energy,
on the other hand, may be reasonably incorporated
without calibrated parameters, via consideration of
mathematical physics of defect densities (i.e., differ-
ential-geometric relations) and (non)linear elasticity
solutions for individual non-interacting defects or
those in idealized yet still sufficiently realistic
arrangements. Regardless of the source of parame-
ters, increased model sophistication results in an
increase in computational expense and enables fewer,
if any, available analytical solutions to boundary
value problems for validation of computational
results.
Diffuse interface models
In the sharp interface classes of models in the ‘‘Sharp
interface models’’ and ‘‘Continuum dislocation and
disclination models’’ sections, lattice orientations
demonstrate jump discontinuities across GBs, as do
material properties such as elastic constants and
thermal expansion coefficients that depend on the
reference orientation of the crystal in Lagrangian
constitutive models of anisotropic media. Even
though regions of finite volume in the vicinity of
boundary interfaces may contain distributions of
defects represented by density tensors that may tend
to smooth the mechanical response over small but
finite distances from GBs, the corresponding models
discussed in the ‘‘Continuum dislocation and discli-
nation models’’ section still treat GB interfaces as
discrete/sharp surfaces with regard to properties
such as elastic coefficients.
Diffuse interface models, perhaps most notably
those termed phase field models, treat GBs as regions
of finite volume over which referential properties
vary continuously with distance from the interior of
one crystal to the interior of its neighbor. Denote a
scalar order parameter associated with a given grain
boundary shared by grains g1 and g2 by g 2 ½0; 1�,such that
gðX; tÞ ¼ 0 8X 2 Xðg1Þ; gðX; tÞ ¼ 1 8X 2 Xðg2Þ;
gðX; tÞ 2 ð0; 1Þ 8X 2 oXðg1;g2Þ;
ð2:27Þ
where now boundary zone oXðg1;g2Þ is of finite vol-
ume. Time is denoted by t. Then, a generic Lagran-
gian property A, which could be a tensor, vector, or
scalar, is interpolated in GB regions from its constant
values Aðg1Þ and Aðg2Þ initially assigned to regions
deep within neighboring crystals as
AðX; tÞ ¼ Aðg1Þ þ /½gðX; tÞ�sAt ¼ Aðg1Þ
þ /½gðX; tÞ�ðAðg2Þ � Aðg1ÞÞ;ð2:28Þ
where / is an interpolation function minimally sat-
isfying the end conditions /ð0Þ ¼ 0 and /ð1Þ ¼ 1.
As discussed in the monograph [18] for example,
an immense literature exists on diffuse interface
models used to describe microstructure generation
and evolution under various thermal and chemical
processes: solidification, grain growth, recrystalliza-
tion, mass transport, diffusion, etc. The scope of the
present discussion in the ‘‘Diffuse interface models’’
section is hereafter limited to classes of models that
treat GBs as diffuse but also address the mechanical
response, specifically stress–strain behavior in crys-
tals, which may be elastic or elastic–plastic.
A relatively recent example of a coupled descrip-
tion of microstructure and mechanics via diffuse
grain boundaries is reported in [75], which is focused
on the electromechanical response of polycrystalline
ferroelectrics. The phase field approach to lattice
orientation assignment and GB representation fol-
lows that of [76], with essential equations of the
method outlined in what follows next. A single order
parameter suffices for description of one GB, e.g., that
in a bicrystal. Diffuse interface models of GBs in
polycrystals with many (n) grains require multiple
order parameters, labeled gðiÞ, where i ¼ 1; 2; . . .; n.
Following [75, 76], regions deep within each grain are
characterized by values
gðiÞðX; tÞ ¼ �1; gðjÞðX; tÞ ¼ 0 8X 2 XðiÞ; ði 6¼ jÞ:ð2:29Þ
For any GB region, for at least one value of i,
5524 J Mater Sci (2018) 53:5515–5545

jgðiÞj 2 ð0; 1Þ: ð2:30Þ
In the absence of mechanical (or thermal, electrical,
etc.) loading, a free energy density per unit reference
volume is prescribed as
fðgðiÞ;r0gðiÞÞ ¼ f0ðgðiÞÞ þ
1
2
X
i
jijr0gðiÞj2; ð2:31Þ
whereji arematerial constants.The smaller thevalue(s)
of ji, the thinner the equilibrium width of a GB inter-
facial zone. The particular function f0 used in [75] is
f0 ¼X
i
� a2ðgðiÞÞ2 þ b
4ðgðiÞÞ4
� �þ c
X
i
X
j 6¼i
ðgðiÞÞ2ðgðjÞÞ2;
ð2:32Þ
with a, b, and c material properties. The function f0
contains 2n wells/minima at ðgð1Þ; gð2Þ; . . .; gðnÞÞ¼ ð1; 0; . . .; 0Þ, ð�1; 0; . . .; 0Þ, ð0; 1; . . .; 0Þ; . . .. Function f0is of a local minimum value within a grain, and
r0gðiÞ ¼ 0 8iwithin a grain, i.e., far from an interface.
The free energy functional for the unloaded body is the
integral over the entire polycrystalline volume X:
F ¼Z
XfdX: ð2:33Þ
Evolution of order parameters follows the Allen and
Cahn [77] formalism, also known as the time-de-
pendent Ginzburg–Landau (TDGL) equation, which
drives the total free energy F of the system to a
minimum. Letting l denote the mobility of the pro-
cess (i.e., a parameter controlling the timescale of GB
kinetics), the local rate equation for each order
parameter in this approach is
_gðiÞ ¼ �ldf
dgðiÞ¼ �l
of0ogðiÞ
� r0 �of
or0gðiÞ
� �
¼ �l agðiÞ � b½gðiÞ�3 � 2cgðiÞX
j6¼i
½gðjÞ�2 þ jir20g
ðiÞ
0@
1A:
ð2:34Þ
The following scalar function that has a value of unity
in each grain and a magnitude less than unity within
each GB region is introduced:
f½gðiÞðX; tÞ� ¼X
i
½gðiÞ�2 2 ð0; 1�: ð2:35Þ
An interpolation function for properties used in [75]
to define the fracture surface energy as GGB ¼ /GC of
GBs is f itself:
/½fðgðiÞðX; tÞÞ� ¼ fðgðiÞðX; tÞÞ 2 ð0; 1�: ð2:36Þ
This approach assigns the critical energy release rate
property to a point X in a GB, denoted by GGB, as
some positive fraction of the constant critical energy
release rate GC assigned to all bulk crystals. Fur-
thermore, in 2D simulations, an orientation angle H is
defined at any point X via interpolation as [75]
HðX; tÞ ¼ 1
fðX; tÞX
i
HðiÞ½gðiÞðX; tÞ�2: ð2:37Þ
Orientation-dependent Lagrangian properties such
as anisotropic elastic constants are then assigned to
GB regions based on the local value of H, where HðiÞ
is the uniform angular orientation of grain i. Notice
that according to this model, lattice orientation in a
given GB region potentially depends on orientations
of (many other) grains not in contact with that
boundary. The diffuse interface framework described
in (2.29)–(2.37) is invoked in [75] to create a poly-
crystalline microstructure and assign orientations
and fracture strengths to all points within the
domain, i.e., GB regions and bulk crystalline regions.
The TDGL equation is solved over a finite domain in
time, beginning with randomly seeded admissible
values of gðiÞ at points X 2 X used as initial condi-
tions, from which grain growth take place. Time
integration of (2.34) must be halted when a realistic
microstructure (e.g., a realistic average grain size) is
obtained; otherwise, a uniform single crystal would
ultimately produce the minimum value of total sys-
tem energy F. The polycrystal is then subjected to
electromechanical loading, with the reference con-
figuration (i.e., microstructure) held fixed in
simulations.
Another example of diffuse interface modeling of
GBs in deformable polycrystals is reported in [78, 79].
Crystal elastic–plastic theory is used to represent the
deformation behavior of aluminum grains in the
aggregate. Accumulated dislocations and associated
stored energy then supply driving forces for GB
motion, e.g., grain growth during recrystallization. A
staggered numerical scheme is implemented to solve
the governing equations of crystal plasticity and
phase field kinetics, where the solution of one set of
physical laws influences that of the other set in suc-
cessive iterations.
Advantages of the diffuse interface models of GBs
include the following. Microstructure evolution, e.g.,
J Mater Sci (2018) 53:5515–5545 5525

GB motion, can be addressed in a more detailed and
realistic way than in phenomenological models with
sharp interfaces. In particular, kinetics of
microstructure evolution are motivated by the fun-
damental principle that a system should seek a con-
figuration for which its total free energy is a
minimum. Regularization associated with gradient
terms in the energy functional introduces length scale
effects and facilitates mesh-size independence of
numerical solutions. Disadvantages of the diffuse
interface models include requisite prescription of
non-unique interpolation functions for property val-
ues within interfacial zones such as / of (2.36), as
well as parameters in the energy functional and
kinetic law such as (ji; a; b; c; l) in the framework of
[75]. In computer simulations, mesh resolution must
be fine enough to resolve field variables and their
gradients within the often very narrow GB zones.
Simultaneous solution of the coupled governing
equations for the microstructure-mechanics problem
may be challenging, especially if vastly different
timescales for GB evolution and stress dynamics (e.g.,
wave propagation) arise.
Twinning
Twins are microstructure features observed in many
kinds of crystals. Twinning may be caused by
mechanical forces, in which case it is termed defor-
mation twinning or mechanical twinning. Twins may
also be induced by other physical stimuli, a
notable example being annealing twins produced via
thermal processing of a material. The present section
focuses mostly on deformation twins, particularly
model descriptions of pseudo-slip and phase field
type in ‘‘Continuum pseudo-slip models’’ and ‘‘Dif-
fuse interface models’’ sections, respectively. Many
aspects of sharp interface models discussed in the
‘‘Sharp interface models’’ section may apply to nearly
any kind of twin, regardless of its origin. Prior to
presentation and evaluation of the aforementioned
classes of twinning models, a few fundamental con-
cepts are reviewed. More complete treatments of
twinning in the context of elastic–plastic continuum
mechanics include [3, 10, 11].
Twinning is a general term that may be used to
describe energy invariant transformations of a crystal
structure with certain characteristics. A twin in a
crystalline solid is usually defined as two regions of a
crystal separated by a coherent planar interface called
a twin boundary. As will be described mathemati-
cally in the ‘‘Sharp interface models’’ section, limiting
values of deformation gradients in each region, on
either side of the twin boundary interface, differ by a
simple shear. Unstressed twinned regions of the
crystal far from boundaries or defects possess the
same strain energy density as the unstressed parent
(i.e., the same energy density as the original crystal
prior to twinning), such that twinning shears are said
to be energy invariant [80, 81].
In the context of ductile solids, deformation twin-
ning is most often associated with thermodynami-
cally irreversible shape deformation in
correspondence with collective motion of partial
dislocations and formation of stacking faults [11, 82].
Deformation twinning is preferred over slip in cases
wherein resistances to dislocation glide are very large
in certain directions, often in crystal systems of low,
e.g., non-cubic, symmetry. In addition to their emer-
gence in ductile metals, deformation twins may also
appear in ceramics, minerals, and molecular crystals
[83], though complex low-symmetry crystal struc-
tures do not ensure their occurrence [84]. Twinning is
often preferable to slip at lower temperatures or at
very high strain rates, though exceptions are not
unusual, depending on material. Mechanical work
done during deformation twinning is dissipative
when resulting from defect motion associated with
shearing. Any stored energy is associated only with
defects left behind in the crystal, for example those
comprising the twin boundary. From the standpoint
of continuum thermodynamics, the driving force for
twin propagation is the resolved shear stress on the
habit plane in the direction of twinning shear, as will
be exploited in the context of pseudo-slip models in
the ‘‘Continuum pseudo-slip models’’ section.
Sharp interface models
A sharp interface model of a twin boundary (TB) is
similar to a sharp interface model of GB. In the latter,
as discussed in the ‘‘Sharp interface models’’ section,
a planar interface oXðg1;g2Þ separates two distinct
crystals g1 and g2 with different referential lattice
orientations, and Lagrangian material properties are
discontinuous across the GB. In the former (TB), a
planar interface oXðp;t1Þ separates the original crystal
(parent) p and the twinned crystal t1, or more
5526 J Mater Sci (2018) 53:5515–5545

generally, two different twins if p is replaced with t2.
Lattice orientations demonstrate a jump discontinuity
across the TB, as do associated anisotropic Lagran-
gian properties such as elastic moduli. However, the
misorientation across a TB is restricted by the crystal
structure and type of twin, while that across a GB is
relatively unrestricted. Furthermore, a simple shear-
ing process describes the transformation from the
original lattice to the twinned lattice, whereas no
such process generally exists for an arbitrary GB.
Unlike general GBs that have a finite radius of cur-
vature, fully formed TBs tend to be flat, though
exceptions are common for growing or receding
twins or those induced by concentrated forces [10]
such as those encountered in (nano)indentation.
The present focus is restricted to coherent TBs, for
which continuity of displacement and traction hold
analogously to (2.18) and (2.19):
suðX; tÞt ¼ 0 , sxðX; tÞt ¼ 0;
ð8X 2 XðpÞ;Xðt1Þand 8X on oXðp;t1ÞÞ;ð3:1Þ
stt ¼ srtn ¼ 0; ð8Xðx; tÞ on oXðp;t1ÞÞ: ð3:2Þ
Kinematics of twinning can be described, in part,
by invoking geometrically nonlinear elasticity theory.
Let two regions of the crystal, which are labeled as
parent p and twin t1, be separated by a surface oXðp;t1Þ
across which displacements of the material are con-
tinuous as in (3.1), but across which gradients of
displacement are not. This surface of composition
[80], which need not be planar, corresponds to the
habit plane in the traditional description of mechan-
ical twinning [82]. Let
FðpÞ ¼ r0xðpÞ; Fðt1Þ ¼ r0x
ðt1Þ ð3:3Þ
denote constant limiting values of deformation gra-
dient FðX; tÞ in each region in the vicinity of the TB,
where X are reference coordinates of the original
crystal prior to twinning. Since volumes and masses
remain positive, detFðpÞ [ 0 and detFðt1Þ [ 0. Let m0
be a unit normal vector to oXðp;t1Þ, pointing from
parent side to the twinned side. The compatibility
requirement that the interface be coherent (i.e., con-
tinuous coordinates x along the surface of composi-
tion or TB) necessitates that Hadamard’s jump
conditions apply [1, 80, 85]:
sFt ¼ Fðt1Þ � FðpÞ ¼ a�m ¼ c0s�m0; ð3:4Þ
where c0 [ 0 is a scalar magnitude of the twinning
deformation (eigen-shear) and s is a spatial unit
vector. Let WðFÞ denote the strain energy density per
unit reference volume of the crystal. Energy invari-
ance of twinning demands that
W ½Fðt1ÞðXÞ� ¼ W ½Q0FðpÞðXÞH�; ð3:5Þ
where Q0 is a proper orthogonal tensor
(Q�10 ¼ QT
0 ; detQ0 ¼ 1) and H is an energy invariant
transformation of the crystal, not necessarily orthog-
onal, that depends on the material’s intrinsic struc-
ture/symmetry. In a single global Cartesian
coordinate system, assuming that H does not induce
volume changes since the converse assertion would
permit the total strain energy of a sample of fixed
mass to remain constant as the volume of the sample
is increased without bound, and noting that
detH ¼ 1, at the same limiting point X 2 oXðp;t1Þ,
detFðt1Þ ¼ detFðpÞ ¼ det½FðpÞ þ a�m0�¼ detFðpÞ½1þ c0s0 �m0�:
ð3:6Þ
It follows that the pullback of s, i.e., s0 ¼ ½FðpÞ��1s,
must be orthogonal to unit normal m0:
s0 �m0 ¼ 0: ð3:7Þ
When the parent is taken as a perfect reference lattice,
then
FðpÞ ¼ 1 ) Fðt1Þ ¼ 1þ c0s0 �m0; ð3:8Þ
demonstrating that Fðt1Þ is indeed a simple shear. In
that case, the equivalent product Q0H is also a simple
shear, possibly of large magnitude, that shifts the
perfect crystal to another minimum energy configu-
ration, with the strain energy density of this config-
uration equivalent to that of the parent. In this
context, the strain energy function W can be inter-
preted as a multi-well potential, with global minima
corresponding to conditions Wð1Þ ¼ WðQ0HÞ ¼ 0, a
characteristic feature that will be exploited later in the
‘‘Diffuse interface models’’ section in the context of
diffuse interface theories of twinning. Notice that the
above description does not account for any (surface)
energy associated with defects along the boundary of
the twin, which can be reflected in continuum theo-
ries via augmentation of the free energy function with
internal state variables, as will be demonstrated in the
‘‘Continuum pseudo-slip models’’ section.
J Mater Sci (2018) 53:5515–5545 5527

The preceding treatment addresses kinematics and
strain energy density for sharp interface model rep-
resentations of twin boundaries. Elements of such a
treatment can be invoked to analyze and predict
occurrence of various preferred microstructures. For
example, laminated twin arrangements (i.e., her-
ringbone patterns) and other characteristic features of
martensite [1, 85] can be predicted from considera-
tion of compatibility constraints and free energy
minimization for certain crystal structures. No
material parameters generally need to be calibrated
in such analyses, which rely on fundamental prop-
erties such as symmetry operations—and transfor-
mation strains if solid–solid phase changes are
involved—associated with crystal structure.
The above treatment does not enable explicit pre-
diction of time-dependent motion of twin bound-
aries, e.g., twin growth and dynamic interactions
with other twins or other crystals in a polycrystal. For
such predictions, a kinetic law for twin boundary
dynamics must supplement the kinematic descrip-
tion, and a (numerical) scheme must be invoked to
track the position of interface(s) as deformation pro-
ceeds in time. Derivation of the corresponding
equations is beyond the present scope, but one such
example of this class of sharp interface model for
twinning dynamics is the 2-D theory and level-set
numerical method of [86]. Therein, a stored energy
function is non-convex with multiple wells. Evolu-
tion of twin interfaces is governed by a kinetic rela-
tion for the twin boundary velocity as a function of
the local driving traction and boundary orientation.
A regularized version of the theory is constructed via
the level-set method which removes the requirement
of treatment of explicit jump conditions. Numerical
finite difference results in [86] compare favorably
with observed phenomena in martensite: cusp for-
mation, needle growth, spontaneous tip splitting, and
microstructure refinement. Unlike purely (nonlinear)
elastic treatments, however, sharp interface models of
TB motion require kinetic laws and material param-
eter(s) that relate driving forces to interface velocities,
for example.
Continuum pseudo-slip models
In what is termed here as a pseudo-slip class of
model, a local volume element of a crystal consists of
fractions of the parent and one or more deformation
twins. Volume or mass fractions of twins evolve
according to a kinetic law, with the driving force for
twinning typically a resolved shear stress acting on
the habit plane of the twin system, in the direction of
twinning shear for that system. Twin boundary
interfaces are not resolved explicitly within each
volume element. However, the boundary between a
fully twinned domain and the parent or a domain
containing twins of other twin systems is captured in
a homogenized or smoothed sense, whereby neigh-
boring coordinates X may support different volume
fractions of each twin variant.
The pseudo-slip approach was apparently first
introduced in [87, 88] where it was used for crystal-
lographic texture predictions. Finite element imple-
mentations of a purely mechanical theory accounting
for elasticity, slip, and twinning were perhaps first
reported in [89, 90], where pseudo-slip laws were
invoked for ductile metals. The first complete ther-
momechanical frameworks accounting for such
deformation phenomena—both exercised to describe
shock or high-pressure phenomena for which higher-
order thermoelasticity is essential—are described in
[73, 83]. The first to also include GNDs in a gradient
theory, merging the nonlinear thermoelasticity, crys-
tal plasticity, and pseudo-slip twinning descriptions
with concepts described in ‘‘Continuum dislocation
and disclination models’’ section, was presented in
[91]. Results of these works address ceramics and
minerals [73, 91] or molecular energetic crystals [83].
The forthcoming presentation summarizes the
theory developed in [3, 73, 91]. The deformation
gradient is decomposed into a product of three terms:
F ¼ r0x ¼ FEFgFP; ð3:9Þ
where thermoelastic deformation FE and deforma-
tion from plastic slip FP have the same meanings as
in (2.9) of the ‘‘Continuum dislocation and disclina-
tion models’’ section. The contribution of twinning
shear to the total deformation gradient for a volume
element at point X and time t is denoted here by
FgðX; tÞ. A term akin to detFI of (2.26) is also used in
the full kinematic framework of [3, 73, 91] to account
for possible volume changes associated with lattice
defects (including dislocation cores, stacking faults,
and TBs) but is omitted here in the interest of brevity.
Let gbðX; tÞ denote the volume fraction of twin
variant b of the material at point X and time t, where
b ¼ 1; 2; . . .; q, with q the number of twin systems. Let
cb0 denote the stress free twinning shear associated
5528 J Mater Sci (2018) 53:5515–5545

with variant b, which has shearing direction sb0 and
habit plane normal mb0. Then, the rate of deformation
and spin from twinning is computed via
Lg ¼ _FgFg�1 ¼X
b
_gbcb0sb0 �mb
0 : ð3:10Þ
The plastic velocity gradient of (2.10) is replaced with
an augmented equation that accounts for the change
in lattice orientation of twinned domains:
LP ¼ Fg _FPFP�1Fg�1
¼ ð1� gTÞX
a
_casa �ma þX
b
gbX
a
_cabsab �ma
b
!:
ð3:11Þ
Here, gT ¼P
gb 2 ½0; 1� is the total twinned volume
fraction, and the second (double) sum is over twin-
ned domains with slip rates _cab and rotated or reflec-
ted director vectors sab and mab. The rotation or
reflection matrices depend on the crystal structure
and twin type, e.g., a type I or type II twin [3, 11].
Equations for thermoelasticity such as (2.11)–(2.13)
still hold, but with the anisotropic thermoelastic
moduli updated according to the weighted rotation/
reflection matrices to account for the twinning
transformation. The free energy function is of the
same generic form as in (2.14), but the twinning
shears must be included in the list of internal state
variables fng to enable description of the effect of
twinning on the anisotropic thermoelastic coeffi-
cients. In the theory of [91], for example,
fng ¼ fgb; qG; qSg: ð3:12Þ
The evolution of the twin variants is dictated by a
pseudo-slip law:
_gb ¼ _gbðsb;T; fngÞ; ð3:13Þ
where the twinning direction (sign of resolved shear
stress sb acting on the variant’s habit plane) must be
respected to account for increased deformation
resistance in the anti-twinning sense. The local
energy balance (i.e., temperature rate equation)
accounts for dissipation from twinning shear in
addition to that from plastic work, extending the
elastic–plastic representation in (2.16).
The pseudo-slip-based class of models to which the
above theory and those developed in [83, 89, 90] belong
enables reasonably accurate predictions of the onset
and evolution of bulk twinningbehavior andassociated
crystallographic texture changes. Such models can be
implemented in existing crystal plasticity simulation
frameworks with modest additional effort. However,
specific kinetic equations and parameters must be
assigned to (3.13), and effects of twinning on slip must
be included in the flow rule for the slip rates via aug-
mentation of (2.15). Calibration and validation of such
features are often problematic, with unique property
selection difficult, if not impossible, due to the immense
number of possible slip–slip, slip–twin, and twin–twin
system interactions, each of which may most generally
demonstrate different physical behaviors [11, 89]. Even
more complexity is introduced if de-twinning is incor-
porated. Phenomenological expressions may be
assigned to describe an evolving thickness to each local
twin variant as in [91], but shapes of each twin variant
are not predicted within a volume element at X by this
class of models. If the gradient aspect of the theory (i.e.,
qG) is omitted as in [73, 83, 89, 90], themodel contains no
intrinsic length for regularization; thus, those models’
predictions do not depend on the absolute size of the
domain. Twin boundary migration has recently been
explicitly incorporated in a computational crystal
plasticity framework applied to nano-twinned metals
[92].
Diffuse interface models
The diffuse interface representation of a twin
boundary (TB) has many similarities to the diffuse
interface modeling scheme of GBs outlined in the
‘‘Diffuse interface models’’ section. One or more order
parameter(s) are introduced that delineate the parent
crystal from one or more twin variant(s). Deep within
the parent and deep within each twin, order param-
eters are homogeneous, typically with numerical
values of zero or unity depending on details of the
model formulation. Twin boundaries are represented
by finite volumes within which spatial gradients of
order parameter(s) do not vanish. Physical properties
that depend on lattice orientation (e.g., anisotropic
Lagrangian elastic constants) are interpolated
between parent and twin(s) across the boundary
regions. Unlike the GB models in which deformation
mechanics are not often addressed, in diffuse inter-
face models of deformation twinning, accounting for
the kinematics is paramount. Specifically important
are the kinematics of the formation of the interface
and the transformation (i.e., stress free shearing) of
the twin variant(s).
J Mater Sci (2018) 53:5515–5545 5529

The first nonlinear phase field theory for twinning
in crystals, incorporating both nonlinear anisotropic
elasticity and geometric nonlinearity, appears to be
that of [93]. Around the same time [94, 95] appeared,
albeit limited to small deformations, e.g., linear
elasticity. In general applications, incorporation of
nonlinear elasticity is deemed crucial, since different
predictions arise in analytical [96] and numerical
results [97, 98], and since shears, rotations, and/or
reflections inherent to the twinning process all tend
to be large, exceeding the usual limits of continuum
linear elastic constitutive models. Supporting the
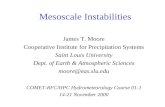
asserted general necessity of nonlinear theory, Fig. 4
demonstrates different results for twinning in calcite
single crystals modeled via the nonlinear theory of
[93, 97] and its linearization. The lamellar features
observed in many instances (e.g., in martensite) are
present in the nonlinear result but absent in the linear
result, speculatively due to some greater departure
from convexity of the total potential energy in the
former. Another nonlinear theory appearing soon
after [93, 97] is applied to martensite in [99].
In what follows next, key features of the varia-
tional, finite deformation, phase field theory for
deformation twinning developed and refined in
[93, 97, 100] are reviewed. Attention here is limited to
a single crystal with a single twin variant; extension
to multiple twin systems is conceptually straightfor-
ward and is described in an appendix of [93]. This
particular theory has not been used in conjunction
with a model component for plastic slip (i.e., glide of
dislocations distinct from twinning partials), mean-
ing the response is limited to combined elastic
deformation and twinning deformation. However, an
example of a coupled phase field-crystal plasticity
model for metals that undergo simultaneous dislo-
cation slip and twinning has been reported [101].
Thermal effects are omitted.
Let the reference volume of a crystal X (which may
be contained within a polycrystal) be divided into
parent XðpÞ, twin Xðt1Þ, and boundary oXðp;t1Þ regions.
The order parameter associated with twinning is
denoted by g and obeys
gðX; tÞ ¼ 0 8X 2 XðpÞ; gðX; tÞ ¼ 1 8X 2 Xðt1Þ;
gðX; tÞ 2 ð0; 1Þ 8X 2 oXðp;t1Þ:
ð3:14Þ
Deformation and displacement are defined as in (2.8),
and the continuity requirements in (3.1) and (3.2) still
apply. However, unlike the sharp interface treatment
of the ‘‘Sharp interface models’’ section, the defor-
mation gradient now is presumed continuous
everywhere, including points in oXðp;t1Þ.
The total deformation gradient obeys the
decomposition
F ¼ r0x ¼ FEFg; ð3:15Þ
where FE is the elastic part and Fg accounts for
shearing due to mechanical twinning. Let s0 and m0
denote constant orthogonal unit vectors in the
direction of twinning shear and normal to the habit
plane, respectively. Let c0 [ 0 denote the magnitude
of stress free shear for a fully transformed domain.
Then,
FgðgÞ ¼ 1þ ½/ðgÞc0�s0 �m0: ð3:16Þ
The interpolation function /ðgÞ obeys
/ðgÞ 2 ½0; 1�; /ð0Þ ¼ 0; /ð1Þ ¼ 1;
d/dg
ð0Þ ¼ d/dg
ð1Þ ¼ 0:ð3:17Þ
Let w denote the free energy density per unit refer-
ence volume of the following form:
wðF; g;r0gÞ ¼ W ½FEðF; gÞ� þ fðg;r0gÞ; ð3:18Þ
with W the elastic strain energy density. The function
f, which is nonzero only in TB regions, consists of the
sum of a double-well potential f0 and a gradient
contribution:
Figure 4 Phase field order parameter g representing twinning in
nano-indentation of calcite single crystal with 120� wedge:
nonlinear theory (left) and linear theory (right) [97].
5530 J Mater Sci (2018) 53:5515–5545

fðg;r0gÞ ¼ f0ðgÞ þ j : r0g�r0g
¼ Ag2ð1� gÞ2 þ j : r0g�r0g:ð3:19Þ
Here, constant A quantifies the depth of the energy
wells, and second-order tensor j penalizes sharp
interfaces. When j ¼ j1, with j a scalar, the TB
energy is isotropic. In this case, the equilibrium
thickness l and equilibrium surface energy per unit
reference area C are related to parameters in (3.19) by
[93]
A ¼ 12C=l; j ¼ 3Cl=4: ð3:20Þ
Let the total free energy functional be denoted by
W, and let t0 denote the mechanical traction vector per
unit reference area and h a conjugate force to the
order parameter acting on global external boundary
oX that has unit outward normal vector n. The fol-
lowing variational principle is applied:
dW ¼ dZ
XwdX ¼
I
oXt0 � dudoXþ
I
oXhdgdoX:
ð3:21Þ
Application of standard mathematical techniques for
analysis of continuous media then results in local
equilibrium equations in X and natural boundary
conditions on oX:
r0 � P ¼ r0 �oW
oF¼ 0;
df0dg
þ oW
og¼ 2r0 � jr0g;
ð3:22Þ
t0 ¼ P � n; h ¼ 2j : r0g� n: ð3:23Þ
The first Piola–Kirchhoff stress is P ¼ ðdetFÞrF�T.
The constitutive model is complete upon specifi-
cation of the strain energy function W and the inter-
polation function /. Regarding the former, any
hyperelastic potential suitable for crystalline media
can be used, but the elasticity tensor(s) C (if aniso-
tropic) must be interpolated in the TB regions, e.g.,
C½gðX; tÞ;X� ¼ CðpÞðXÞ þ /½gðX; tÞ�fCðt1ÞðXÞ � CðpÞðXÞg:ð3:24Þ
Two interpolation functions have used with success
to date, a cubic polynomial and a Fermi–Dirac
exponential [98]:
/ ¼ ð3� 2gÞg2; / ¼ 1
1þ exp½�30ðg� 1=2Þ� :
ð3:25Þ
The latter function in (3.25) yields a rather steep
change in / near g ¼ 1=2.
Although this model is variational and quasi-static,
evolution of twin morphology during deformation
paths is predicted by sequential energy minimization
(i.e., minimization of W subject to any essential
boundary constraints) as loads are incrementally
applied. The predictive capability of the theory
described above has been validated or favorably
compared with results from experiments, analysis, or
atomic simulations for a number of crystalline
materials—calcite, sapphire, and magnesium—for
problems involving twin nucleation and/or growth
from a seedling [93], indentation [97], and a notch or
crack tip [98]. A generic twinning criteria based on
analytical solutions to the phase field theory for
localized versus diffuse transformation has also been
validated [100].
The primary purpose of the diffuse interface
approach to modeling twins and TBs is prediction of
detailed, fine-scale twin morphology. Balance laws
(or kinetic laws if a TDGL or Allen-Cahn [77] equa-
tion is invoked as in [94, 95]) are derived from fun-
damental principles of energy minimization rather
than user-prescribed phenomenology as is typical in
pseudo-slip models of the ‘‘Continuum pseudo-slip
models’’ section. Furthermore, few, if any, material
parameters must be calibrated. This advantage par-
tially disappears if continuum slip laws requiring
parameterization are added to the theory, as in [101],
for example. The length scale of regularization l is
controlled by the modeler and dictates the equilib-
rium width of TB zones. The regularization process
renders numerical simulations mesh-size indepen-
dent so long as the discretization is fine enough to
resolve order parameter gradients in such zones. This
is often a drawback in simulations involving
twin(s) of size much larger than their boundary
zones, since very fine meshes must be used to resolve
boundaries that encompass a relatively small overall
fraction of the entire problem domain.
The motion of twin or crystallographic phase
boundaries—be it via dynamic extension, thickening,
or migration—may crucially influence the mechanical
response of certain crystals, particularly nano-twin-
ned metals [102], shape memory alloys, and
martensite [85, 103]. A novel theory and comple-
mentary computational method were recently
developed that includes distinct prescriptions of
J Mater Sci (2018) 53:5515–5545 5531

nucleation through the source term of the phase field
conservation law and kinetics through a distinct
interfacial velocity field [104, 105]. This approach
alleviates potential obscurity of these physical phe-
nomena suffered by classical phase field
implementations.
Failure and localization
Mesoscopic continuum models of damage processes
in polycrystals are now addressed. These processes
tend to be irreversible and dissipative. Examples
include fracture, void formation and growth, pore
collapse, and shear localization. In crystalline mate-
rials, fractures may occur along GBs, i.e., intergran-
ular modes, and/or along cleavage planes within a
grain, i.e., transgranular modes. Regarding inter-
granular fracture, some kinds of crystals demonstrate
preferred planes, typically of low surface energy,
while others do not, in which case fractures tend to be
conchoidal [106]. Void mechanisms arise in ductile as
opposed to brittle solids, wherein plastic deformation
of surrounding matrix material enables volumetric
growth of damage rather than planar fractures. In
materials with initial porosity, including many min-
erals and their composites (e.g., concrete [107]) pores
may be irreversibly compressed out of the material
due to mechanical pressure, leading to an increase in
compressive bulk modulus. As discussed already in
the ‘‘Sharp interface models’’ section, shear bands
may arise due to lattice orientation effects [39], but
are perhaps most common in high rate deformation
processes wherein localization is promoted by
(nearly) adiabatic heating and thermal softening [8].
Tensile wave interactions also can induce damage
mechanisms, specifically spall failure [108], which
may entail dynamic brittle fracture or ductile failure
via void coalescence, depending on ductility of the
polycrystal.
Cohesive fracture models
Cohesive fracture models are a kind of sharp inter-
face representation of failure at the mesoscale. The
theoretical concept of such models, most often
attributed to [109, 110], is that along surfaces near a
crack tip, the degraded material supports a nonzero
traction vector over some finite distance, called the
cohesive zone length. The traction tends to decrease
in magnitude as the crack opening displacement
increases. Traction generally includes both normal
and shear components, in association with mode I
and mode II/III crack opening dispacements [7]. The
earliest numerical implementation of a cohesive fail-
ure model in a finite element context appears to be
documented in [111]. Subsequently, cohesive failure
elements have been invoked in quasi-static crystal
plasticity simulations [112, 113], thermoelastic simu-
lations of ceramics [44], and elastodynamic simula-
tions of crack branching [114] and spall [45]. The first
dynamic simulations coupling finite crystal ther-
moelasto-plasticity with cohesive failure along GBs
seem to be those reported in [115, 116], with a follow-
up study of spall in [117]. Representative simulation
results for cohesive failure modeling of dynamic
fracture in ceramic and metallic polycrystalline
microstructures are shown in Figs. 5 and 6, respec-
tively. In all such simulations, the bulk material
response within continuum finite elements is mod-
eled via standard thermoelasticity or crystal elasto-
plasticity, e.g, models discussed in the ‘‘Grain
boundaries’’ section of this work. The cohesive zone
model is invoked for failure/separation behavior
along element boundaries.
A few key equations for a basic cohesive zone
model of fracture are reviewed next. An immense
literature on cohesive fracture modeling has emerged
over the previous two decades, with more sophisti-
cated theoretical and numerical formulations
accounting for various subscale physical mechanisms
and thermodynamic aspects now available. The pre-
sentation below is the minimum deemed necessary to
illustrate the fundamental mechanical concepts.
Let the crack opening displacement vector across
two crack faces initially coincident at point X be
defined as the displacement jump
dðX; tÞ ¼ suðX; tÞt; ð4:1Þ
where now obviously the continuity constraint in
(2.18) is violated across the crack surfaces. Denote by
nðXÞ the unit normal to the surface of impending
fracture, referred to the reference coordinate system.
Let t0 denote the traction vector per unit reference
area:
t0 ¼ P � n; ð4:2Þ
with P the first Piola–Kirchhoff stress tensor. In the
cohesive zone, a general form of traction–separation
law is prescribed:
5532 J Mater Sci (2018) 53:5515–5545

t0 ¼ t0ðd; fvgÞ: ð4:3Þ
Potential history effects are captured by state vari-
able(s) fvg. Typically, a magnitude of displacement
dC is assigned as a material property or parameter,
beyond which traction vanishes and the crack sur-
faces become free surfaces. For quasi-static imple-
mentations, a stiffness matrix is usually needed, in
which case the traction function must have a con-
tinuous derivative with respect to opening displace-
ment. For simulations invoking explicit numerical
integration, on the other hand, this differentiability
restriction does not hold. The work done during
separation can be related to a surface energy of
fracture C, equal to half the critical strain energy
release rate in the context of linear elastic fracture
mechanics:
C ¼ 1
2
Z dC
0
t0 � dd; ð4:4Þ
where the path of integration ends when the critical
separation magnitude is attained. Perhaps the sim-
plest realistic model is the triangular cohesive law
jt0j ¼ rCð1� jdj=dCÞ; ð4:5Þ
which can be invoked separately for magnitudes j � jof normal and shear components. Here, rC is the
strength required to initiate fracture, i.e., the resolved
scalar stress component at which the cohesive zone
starts to open. Only two of the three parameters
(C; rC; dC) need be prescribed since (4.4) enables one
of these to be eliminated algebraically. More sophis-
ticated models accounting for mode mixity are typi-
cal [114, 118], but these often need additional
calibration or parameters. The length of the cohesive
zone in the context of isotropic linear elastic fracture
mechanics is [7, 118]
Figure 5 Shear stress r in AlON ceramic under simulated shear and compression with nonlinear elastic grains and cohesive finite
elements at GBs: external view (left) and internal view (right) [27].
Figure 6 Particle velocity up in shock wave prior to spall (left, arrows are velocity vectors; colors indicate velocity magnitude) and
effective stress at spall zones (right) in dynamic crystal plasticity-cohesive finite element simulations [117].
J Mater Sci (2018) 53:5515–5545 5533

lC � 2EC
pr2Cð1� mÞ2; ð4:6Þ
where E and m are the elastic modulus and Poisson’s
ratio.
Cohesive failure models often enable realistic pre-
dictions of brittle or ductile failure in microstructures.
Distinct fracture entities, i.e., crack sizes and shapes,
are fully resolved, and interactions among entities are
naturally addressed. Advantages of this class of
model include relatively few parameters [minimally
two, e.g., dC and rC in the context of (4.5)] and distinct
behavior of interfaces and bulk material, meaning
that traditional solid continuum elements can be used
for representing the latter. However, real polycrys-
talline solids demonstrate a distribution of strengths
and surface energies among potential failure sites
(e.g., various kinds of GBs, different families of
cleavage planes, and initial defect structures that
affect toughness), a characteristic often ignored in
deterministic computer simulations. Numerical
implementation of the basic model is rather
straightforward, though additional nodal degrees of
freedom increase the computational expense where
duplicate nodes are inserted along failure planes. A
potentially severe drawback is that fracture paths are
constrained to follow element boundaries in most
computer implementations. Therefore, meshes must
be constructed such that realistic crack paths are
possible, often requiring some a priori knowledge of
failure morphologies. This drawback is alleviated
when fractures are restricted to preexisting interfaces
such as GBs, which makes the approach ideal for
representing intergranular failure or fracture between
phases of heterogeneous crystals such as reported in
[115–117]. Cleavage fracture on specific planes is
more difficult to address via cohesive element mod-
eling, but examples of success have been reported
[119]. Finally, cohesive finite element sizes must be
small enough to resolve behavior over the cohesive
length, e.g., must be smaller than lC of (4.6). Extre-
mely fine meshes are often necessary for representing
fracture zones of materials with high strength and
low surface energy, e.g., many strong yet brittle
ceramics, as modeled, for example, in [120].
Continuum damage mechanics
In continuum damage mechanics models, individual
failure entities such as discrete cracks and voids are
not resolved explicitly. Instead, one or more state
variable(s) is introduced as a function of time t and
material coordinates X that accounts for degradation
of the material at a local material point and a given
time instant. Such state variables, which may be
scalar-, vector-, or tensor-valued, quantify the effects
of multiple damage entities contained within a local
volume element of material at that point. Research
books on the subject include [121, 122]. The funda-
mental concept, in the context of a scalar damage
mechanics theory, is often attributed to [123].
The forthcoming presentation considers a
(poly)crystalline solid whose damage is represented
by a scalar state variable DðX; tÞ 2 ½0; 1�. Generaliza-
tion to a vector, tensor, or multiple scalars is in
principle straightforward but notationally more
cumbersome. The solid is assumed to be hyperelastic
and may undergo plastic slip, following the finite
deformation continuum formalism discussed in the
‘‘Sharp interface models’’ and ‘‘Continuum disloca-
tion and disclination models’’ sections. The defor-
mation gradient is decomposed multiplicatively as
F ¼ r0x ¼ FEFDFP; ð4:7Þ
where FE includes thermoelastic deformation of the
crystal lattice as well as mechanically reversible
changes in damage (e.g., elastic crack closure on load
release), FP accounts for plastic slip from dislocations
as described in the ‘‘Sharp interface models’’ section,
and FD accounts for mechanically irreversible dam-
age mechanisms such as cracks and voids that remain
in the solid upon elastic unloading. A three term
decomposition of this general form was proposed in
[124]. Other forms of the deformation gradient that
reflect residual damage modes include additive
[115, 125, 126] and hybrid additive–multiplicative
[113, 127] decompositions, often derived or moti-
vated from homogenization of discrete displacement
jumps associated with cracks within a volume ele-
ment of material. Transformations between additive
and multiplicative descriptions have also been
derived [125, 128]. The volume fraction of damage N
(i.e., porosity) is related to the determinant of FD as
[3, 129]
JD ¼ detFD ¼ ð1� NÞ�1=3: ð4:8Þ
Besides its use for solids with voids [124, 129] or
pores [21, 107], a multiplicative damage term has
been introduced for cleavage cracking in crystals
5534 J Mater Sci (2018) 53:5515–5545

driven by resolved normal and shearing tractions in
pseudo-slip-type models [32, 128, 130].
The list of internal state variables of (2.22) is
extended to include damage in addition to
dislocations:
fng ¼ fqG; qS;Dg: ð4:9Þ
Damage variable D varies from zero to unity as the
material at the corresponding point loses integrity.
The free energy density w therefore depends on
damage in addition to elastic strain E, temperature T,
and dislocation densities. The elastic second Piola–
Kirchhoff stress and conjugate force to damage are
S ¼ owoE
; f ¼ � owoD
: ð4:10Þ
An equation similar in form to (2.13) applies for the
stress, but now elastic moduli depend on damage.
The simplest degradation model of the moduli is
linear in D:
C½DðX; tÞ;X� ¼ ½1�DðX; tÞ�C0ðXÞ; ð4:11Þ
with C0ðXÞ ¼ Cð0;XÞ the tensor of elastic moduli for
the undamaged crystal at the corresponding material
point. For an isotropic solid, (4.11) leads to a constant
Poisson’s ratio. More sophisticated degradation laws
are required to more realistically capture physics of
arbitrary loading paths, such as damage induced
anisotropy and differences in tensile versus com-
pressive degradation, where generally the former is
more severe.
The work done by the appropriate stress tensor
acting on the rate of FD contributes to local dissipa-
tion, as does the product f _D. Kinetic equations must
be supplied for time rates of FD and D, e.g., of general
forms
_FD ¼ _FDðE; fng;T;FDÞ; _D ¼ _DðE; fng;T;FDÞ:ð4:12Þ
Dependence on elastic strain and internal state vari-
ables is often conveniently replaced with physically
more transparent dependence on stress and other
thermodynamic driving forces. Kinetic equations for
plasticity and dislocation density are likewise affec-
ted by nonzero damage [124, 130]; e.g., stress con-
centrations may increase the tendency for plastic
flow.
Capabilities and caveats of the continuum damage
classes of material models can be summarized as
follows. The present class of models to which the
above theory, and typical of those discussed in
[121, 122], enables reasonably accurate predictions of
the onset and evolution of bulk damage behavior and
associated changes in elastic stiffness. These models
can often be implemented in existing continuum
mechanics simulation frameworks, including those
accounting for crystal plasticity, with modest over-
head. Unlike cohesive finite element approaches, no
special interfacial elements or node duplications are
necessary. Unfortunately, specific kinetic equations
and parameters must be assigned to (4.12), and cou-
pled effects of D must be included in the flow rule for
the slip rates via augmentation of (2.15). Calibration
and validation of these aspects of the model are often
difficult, and unique specification of all parameters
cannot usually be ensured from available test data for
a particular material. Additional complexity is injec-
ted when more realistic formulations involving
multiple damage variables or vector- or tensor-val-
ued damage variables are employed for anisotropic
media. Since damage is homogenized at each point X,
this class of models is unable to resolve solution
fields of discrete cracks or voids and their interac-
tions. The damage components of this class of model
contain no intrinsic length for regularization, and
problems that involve the usual material softening
with increasing D often suffer from mesh-size-de-
pendent numerical solutions. Such problems can be
alleviated when gradient terms are considered, e.g.,
qG if GNDs are addressed as in (4.9) or [130]. Gra-
dients of the damage variable can also be introduced
into the balance equations and/or kinetics, which
renders the continuum damage theory nonlocal and
hence non-classical. This type of regularization is a
characteristic advantage of diffuse interface or phase
field approaches discussed next in ‘‘Diffuse interface
models’’ section.
Diffuse interface models
Diffuse interface classes of models for failure mech-
anisms, which include phase field representations of
fracture, do not resolve discrete jumps in the dis-
placement field in contrast to sharp interface-type
(e.g., cohesive zone) models. Instead, fracture sur-
faces (or other failure surfaces) are described by one
or more order parameter(s). In the usual case, an
order parameter is assigned a uniform value (e.g.,
zero or unity) in regions of material where no dam-
age exists or where complete failure has occurred.
J Mater Sci (2018) 53:5515–5545 5535

The change from initial or undamaged state to fully
failed state can be thought of as a transition from a
perfect crystal to a liquid state or a vacuum,
depending on the strength/stiffness properties
attributed to the fully failed state. Boundaries
between fully failed and perfectly intact material are
represented by order parameter gradients, and in
such boundary regions the order parameter takes on
a value between its two extremes. Lagrangian elastic
properties depend on the order parameter, with a
decrease in local tangent stiffness correlating to an
increase in local damage.
Two of the earliest diffuse interface models of
fracture are reported in [131, 132]. These early models
invoked linearity in terms of deformation kinematics
and elastic response. A nonlinear diffuse interface
model for isotropic solids is presented in [133] in
concordance with 2-D simulations. The first nonlinear
phase field model for fracture in anisotropic crystals
is described in [134]. In that work, 3-D simulations for
mode I and mode II loading are validated versus
analytical solutions, and a problem associated with
crack bridging is investigated. Specifically, the ten-
dency for a cleavage fracture to propagate around a
spherical inclusion or cut through the inclusion is
quantified in terms of stiffness and strength proper-
ties of the matrix and the sphere. A particular result
in which the crack is deflected around the inclusion is
shown in Fig. 7. Mesoscale phase field simulations of
simultaneous intergranular and transgranular frac-
tures in anisotropic polycrystals, with and without
secondary GB phases, are reported in [30], with
characteristic results shown in Fig. 8.
The forthcoming discussion presents key aspects of
the nonlinear anisotropic phase field model for frac-
ture of [134]. As noted above, displacement and
traction are continuous fields, so constraints (2.18)
and (2.19) hold. Plastic deformation, twinning, and
thermal effects are omitted in what follows, noting
that a coupled nonlinear phase field theory for
simultaneous fracture and twinning mechanisms has
been developed and analyzed in [100], with numeri-
cal simulation results for polycrystals given in [135].
Let the reference volume of a crystal X be divided
into perfect XðpÞ, fully failed XðfÞ, and boundary oXðp;fÞ
regions. The theory considers a single order param-
eter gðX; tÞ, where now
gðX; tÞ ¼ 0 8X 2 XðpÞ; gðX; tÞ ¼ 1 8X 2 XðfÞ;
gðX; tÞ 2 ð0; 1Þ 8X 2 oXðp;fÞ:
ð4:13Þ
Deformation and displacement are defined as in (2.8),
with the deformation gradient and its determinant
associated with volume change given by the usual
equations
F ¼ r0x; J ¼ detF[ 0: ð4:14Þ
The free energy density per unit reference volume is
of the following form:
wðF; g;r0gÞ ¼ WðF; gÞ þ fðg;r0gÞ; ð4:15Þ
with W the elastic strain energy density. The function
f, which vanishes identically in the perfect/pristine
regions of the crystal(s), consists of the sum of a
quadratic potential f0 and a quadratic gradient
contribution:
fðg;r0gÞ ¼ f0ðgÞ þ j : r0g�r0g
¼ Clg2 þ fCl½1þ bð1�m�mÞ�g : r0g�r0g:
ð4:16Þ
Here, C is the surface energy of fracture, l is the
equilibrium width of the diffuse fracture zone, m is a
unit normal vector to a preferred cleavage plane in
the reference configuration, and b is a penalty factor
that should be prescribed as a large number to restrict
Figure 7 Phase field prediction of crack deflection around a
strong second-phase inclusion for far-field mode I loading with
failed material (g[ 0:7) removed to visualize crack propagation
[134].
5536 J Mater Sci (2018) 53:5515–5545

fractures to take place along m. Isotropic fracture
corresponds to b ¼ 0, in which case m is not needed.
The strain energy density W may be any nonlinear
elastic potential suitably modified to account for
degradation of stiffness with increasing values of g.For isotropic neo-Hookean elasticity considered in
some simulations [134], the shear modulus ldegrades from its initial value l0 as
lðgÞ ¼ l0½fþ ð1� fÞð1� gÞ2�; ð0 f 1Þ:ð4:17Þ
Parameter f, if nonzero, provides for finite stiffness infully fractured zones. The bulk modulus degrades in
tension but not in compression via a criterion based
on local values of volume ratio J. Similar treatments
for degradation of anisotropic elastic constants for
crystals are described in [30].
Derivation of the Euler–Lagrange equations paral-
lels that of the ‘‘Diffuse interface models’’ section. The
total free energy functional is W, t0 denotes the
mechanical traction vector per unit reference area,
and h is a conjugate force to the order parameter
acting on boundary oX that has unit outward normal
vector n. The first Piola–Kirchhoff stress tensor is P. A
variational principle is applied:
dW ¼ dZ
XwdX ¼
I
oXt0 � dudoXþ
I
oXhdgdoX;
ð4:18Þ
which results in local equilibrium equations and
natural boundary conditions:
r0 � P ¼ r0 �oW
oF¼ 0; 2
Cglþ oW
og¼ 2r0 � jr0g;
ð4:19Þ
t0 ¼ P � n; h ¼ 2j : r0g� n: ð4:20Þ
Diffuse interface models of fracture or material
failure exhibit some important positive characteris-
tics: structural transformations occur naturally via
energy minimization as in the approach outlined
Figure 8 Phase field predictions of inter- and transgranular
fracture in anisotropic Zn polycrystal of edge length L under axial
tensile strain e with failed material (g[ 0:7) removed to visualize
crack propagation [30]: a L ¼ 100 lm, e ¼ 0:15% b L ¼ 100lm,
e ¼ 0:20% c L ¼ 100 nm, e ¼ 4:4% d L ¼ 100 nm, e ¼ 8:0%.
J Mater Sci (2018) 53:5515–5545 5537

above, or Ginzburg–Landau-type kinetics [131],
without recourse to phenomenology associated with
often ad hoc, user-prescribed rate equations for
damage evolution. Correspondingly, relatively few
material parameters or properties are usually needed.
For example, in the theory of [30, 134] described
above, the only required parameters are the elastic
constants, fracture surface energy C, and the length
constant l. Regarding the latter, numerical solutions
are regularized and thus are rendered mesh-size
independent by l, which is associated with interfacial
width. Regularized variational models invoking the
form of modulus degradation in (4.17) may also
demonstrate so-called gamma convergence toward
the classical Griffith theory of fracture mechanics as
the regularization zone shrinks to a singular surface.
Detailed damage morphologies can be predicted by
numerical simulations invoking phase field fracture
theory, including crack nucleation and branching and
interactions among multiple cracks [136]. Standard
continuum finite element technologies and meshing
strategies can be used since fields are continuous, but
additional degree(s) of freedom [i.e., order parame-
ter(s)] must be updated at each node as the calcula-
tion proceeds incrementally. A disadvantage of the
phase field approach to modeling fracture is the
requirement of resolution of damage surfaces/
boundaries. A very fine mesh is needed to resolve
order parameter gradients across narrow zones
where crack surfaces exist. Dynamic remeshing
strategies have been invoked in some cases to deal
with this issue [137]. Problems associated with
proper modeling of large crack velocities via phase
field models in the setting of elastodynamics have
also been reported [138].
Although the preceding discussion deals with
physics of fracture, separation of material in con-
junction with shear localization can be addressed via
similar principles. A combined phase field model for
plastic deformation, adiabatic shear localization, and
ductile fracture in metals is described in [139]. Shear
band thickness may evolve, which can complicate
mesoscale mechanics of plasticity at their interfaces,
for example a realistic prescription of a regularization
length. Insight into the width and structure of shear
bands in ductile metals may be found in analysis and
numerical solutions reported in [8, 140, 141].
Another recent diffuse interface approach is
applied to shear localization or shear fracture in
magnesium [142] and boron carbide [143, 144], with
the latter material known to undergo stress-induced
amorphization promoted by compression and shear
[145]. The novelty of the recent theory presented in
[142, 144]—with initial developments first reported in
[146]—is use of Finsler differential geometry to for-
mulate the governing kinematic and equilibrium
equations. Essentially, the generalized theory of
Finsler-geometric continuum mechanics permits the
metric tensor and corresponding local volume ele-
ments to depend on the order parameter(s) compris-
ing the state vector of pseudo-Finsler space, enabling
a natural coupling between dilatation or volume
collapse and shearing modes, without introduction of
spurious fitting equations or calibrated parameters.
Though not yet undertaken, the same approach could
be used to address dilatation in the vicinity of
stacking faults or twin boundaries in crystals
[147–149]. The first analytical solutions for Finsler-
geometric continuum theory are derived in [146];
subsequent solutions are also validated versus
experimental observations for the above noted crys-
talline materials in [142, 144, 150, 151]. An alternative
Finsler-based thermomechanical theory was applied
in numerical simulations of shear localization in
metals in [152, 153].
Discussion
Capabilities and notable advantages and disadvan-
tages of modeling techniques—sharp interface, con-
tinuum defect, and diffuse interface
representations—are summarized next. The author’s
viewpoint is that all such models have been suitably
validated versus experiment or atomic simulation for
their intended applications, as has been noted
already with supporting references in corresponding
sections of the main text of this article and references
cited therein.
First consider sharp interface models. Sharp inter-
face representations of grain boundaries (GBs) permit
explicit modeling of strain and stress concentrations
of field variables near mismatched interfaces. No
additional constitutive model parameters are
required beyond those for the bulk material. The
approach is physically realistic for thermoelasticity
since properties and hardness tend to vary little from
points near the GB to points far in the grain interior.
The approach is also considered physically accurate
in the sense that atomically sharp boundaries are
5538 J Mater Sci (2018) 53:5515–5545

modeled by jumps in properties, with no artificial
smoothing. Similar statements apply for sharp inter-
face models of twin boundaries (TBs). No spurious
material parameters generally need to be calibrated
to address problems in elastostatics. To address
interface motion, however, a kinetic law for GB or TB
dynamics must supplement the kinematic descrip-
tion, and a (numerical) scheme must be invoked to
track the position of interface(s) as deformation pro-
ceeds in time. Implementation of explicit front-
tracking often proves challenging. Cohesive failure
models are categorized as sharp interface models for
material separation. Distinct crack morphologies are
suitably captured, as are interactions among cracks
and other heterogeneities. Advantages include rela-
tively few parameters for basic crack separation laws
and distinct behavior of interfaces and bulk material
permitting use of traditional solid continuum finite
elements for the bulk. Variations in initial failure
properties, which may be extreme in brittle solids,
can unfortunately increase the number of parameters
needed for realistic predictions. Numerical imple-
mentation is usually straightforward. A disadvantage
is that fracture paths are often constrained to follow
element boundaries. Cohesive finite element sizes
must be small enough to resolve behavior over the
cohesive length, an issue that may necessitate very
fine meshes at correspondingly high computational
expense.
Next consider continuum defect descriptions of
interfaces in crystalline solids. Crystal plasticity can
be augmented to explicitly account for defect (e.g.,
dislocation and disclination) densities in the vicinity
of grain and subgrain boundaries. Benefits include
physical flexibility, with size effects and microstruc-
ture evolution at different resolutions naturally
addressed. Regularization associated with higher-
order gradient terms may enable mesh-size inde-
pendence of numerical solutions. Additional param-
eters must be prescribed and often calibrated rather
than determined from first principles. Furthermore,
increased model sophistication contributes compu-
tational expense and limits availability of analytical
solutions for model verification. Pseudo-slip-type
twinning models enable reasonably accurate predic-
tions of the onset and evolution of bulk twinning
behavior and texture changes. These can usually be
implemented in crystal plasticity frameworks with
modest effort. Kinetic equations and parameters must
be assigned, and effects of twinning on slip must be
included in the flow rule. Calibration and validation
of such features is often problematic. Shapes of each
twin variant within a local material volume element
are not predicted. Continuum damage models can
reasonably predict onset and evolution of bulk
damage behavior and changes in stiffness. These
models can often be implemented in existing simu-
lation frameworks with modest overhead, and no
special interfacial elements or node duplications are
needed. Kinetic equations and parameters must be
assigned for damage and its effects on plastic flow.
Calibration is often difficult, and unique specification
of all parameters cannot usually be ensured. Com-
plexity increases as multiple scalar damage variables
or vector- or tensor-valued damage variables are
employed for anisotropic media. Solution fields of
discrete cracks or voids and their interactions are not
well described. Usually, such models contain no
intrinsic regularization length.
Finally, consider diffuse interface representations
which notably encompass phase field descriptions.
Microstructure evolution can often be addressed in a
natural way, whereby kinetics of microstructure
evolution is motivated by the fundamental principle
that a system should seek a minimum energy state.
Regularization is obtained as a by-product of gradi-
ent terms in the energy functional. Disadvantages
include necessary choices of non-unique interpola-
tion functions for property values within interfacial
zones and parameters in the energy functional and
kinetic laws that may lack obvious physical inter-
pretation. Mesh resolution must be fine enough to
resolve field variables and their gradients. Disparate
timescales for microstructure evolution and stress
dynamics may complicate numerical solution proce-
dures. The diffuse interface approach to modeling
twins and twin boundaries enables prediction of
detailed, fine-scale twin morphologies for equilib-
rium states. Diffuse interface models of fracture
likewise naturally enable prediction of failure
behavior via energy minimization, without recourse
to phenomenology usually associated with contin-
uum damage mechanics theories. Relatively, few
material parameters or properties are needed. Com-
plex crack morphologies can be predicted by
numerical simulations invoking phase field fracture
theory. Standard continuum finite elements and their
meshes can be used since fields are continuous, but
additional degree(s) of freedom are needed to track
order parameter(s). A disadvantage is that very fine
J Mater Sci (2018) 53:5515–5545 5539

meshes needed to resolve order parameter gradients
across narrow zones (i.e., regularization lengths)
where crack surfaces exist. The regularization length
is thus often artificially increased in a compromise of
physical realism with computational cost.
General trends in capabilities are summarized in
Table 1, representative of many of the theories
developed or implemented in works cited through-
out the text. Exceptions to these trends are possible.
This article, as implied by its title, has focused on
interfacial physics from the perspective of (contin-
uum or mesoscale) mechanics. Applications of sharp
and diffuse interface models to broad classes of
materials science problems, including those not
addressed herein such as solidification, for example,
have been discussed in books and other review arti-
cles on these subjects [18, 154–156].
Conclusions
Models of interfaces in crystalline solids have been
categorized, summarized, and evaluated. Emphasis
has been given to finite deformation descriptions at
the mesoscale, with attention limited to continuum
mechanical frameworks, as opposed to molecular
statics/dynamics. Particular physical boundaries
considered have been grain and subgrain boundaries,
twin boundaries, and failure surfaces (e.g., fracture
planes). For each type of physical boundary, corre-
sponding models have been grouped into one of
three general categories: sharp interface models,
continuum defect models, and diffuse interface (e.g.,
phase field) models. Though moderately lengthy, the
present review of course does not claim to cover all
important works, with any notable exclusions unin-
tended. It is hoped that the present article will be a
useful aid to researchers beginning studies on the
subject and a useful reference for those more expe-
rienced, pointing out some key historic and more
modern, perhaps overlooked, references wherein
further details can be found.
Acknowledgements
Much of this paper was written while the author
served as a visiting research fellow at Columbia
University in the Department of Civil Engineering
and Engineering Mechanics of the Fu Foundation
School of Engineering and Applied Science in New
York, NY, USA. The author acknowledges the cour-
tesy of Dr. WaiChing (Steve) Sun for hosting his
sabbatical visit at Columbia University in 2016.
References
[1] Phillips R (2001) Crystals, defects and microstructures:
modeling across scales. Cambridge University Press,
Cambridge
[2] Rohrer GS (2001) Structure and bonding in crystalline
materials. Cambridge University Press, Cambridge
[3] Clayton JD (2011a) Nonlinear mechanics of crystals.
Springer, Dordrecht
[4] Yadav S, Ravichandran G (2003) Penetration resistance of
laminated ceramic/polymer structures. Int J Impact Eng
28:557–574
Table 1 Classes of mesoscopic interfacial models, examples, and general characteristics
Sharp interface Continuum defect Diffuse interface
Examples
(Grain boundary) Discrete GB models
(property jumps)
Distributed dislocation/disclination Phase field models of GBs
(Twinning) Discontinuous
deformation gradient
Pseudo-slip twinning models Phase field models of twinning
(Failure) Cohesive fracture models Continuum damage mechanics Phase field models of fracture
Complexity
(usual governing equations)
Low High Moderate
Generality
(usual physics addressed)
Low High Moderate
Phenomenology
(typical calibration and parameters)
Low High Moderate
5540 J Mater Sci (2018) 53:5515–5545

[5] Clayton JD (2015) Modeling and simulation of ballistic
penetration of ceramic-polymer-metal layered systems.
Math Probl Eng 2015:709498
[6] Brandon DG (1966) The structure of high-angle grain
boundaries. Acta Metall 14:1479–1484
[7] Rice JR (1968) Mathematical analysis in the mechanics of
fracture. In: Liebowitz H (ed) Fracture: an advanced trea-
tise. Academic Press, New York, pp 191–311
[8] Wright TW (2002) The physics and mathematics of adia-
batic shear bands. Cambridge University Press, Cambridge
[9] Hughes DA, Hansen N, Bammann DJ (2003) Geometri-
cally necessary boundaries, incidental dislocation bound-
aries and geometrically necessary dislocations. Scr Mater
48:147–153
[10] Boiko VS, Garber RI, Kosevich AM (1994) Reversible
crystal plasticity. AIP Press, New York
[11] Christian JW, Mahajan S (1995) Deformation twinning.
Prog Mater Sci 39:1–157
[12] Dongare AM, LaMattina B, Irving DL, Rajendran AM,
Zikry MA, Brenner DW (2012) An angular-dependent
embedded atom method (A-EAM) interatomic potential to
model thermodynamic and mechanical behavior of Al/Si
composite materials. Modelling Simul Mater Sci Eng
20:035007
[13] Zhigilei LV, Volkov AN, Dongare AM (2012) Computa-
tional study of nanomaterials: from large-scale atomistic
simulations to mesoscopic modeling. In: Bhushan B (ed)
Encyclopedia of nanotechnology. Springer, Berlin,
pp 470–480
[14] Abraham FF, Broughton JQ, Bernstein N, Kaxiras E (1998)
Spanning the continuum to quantum length scales in a
dynamic simulation of brittle fracture. Europhys Lett
44:783–787
[15] Knap J, Ortiz M (2001) An analysis of the quasicontinuum
method. J Mech Phys Solids 49:1899–1923
[16] Clayton JD, Chung PW (2006) An atomistic-to-continuum
framework for nonlinear crystal mechanics based on
asymptotic homogenization. J Mech Phys Solids
54:1604–1639
[17] Chung PW, Clayton JD (2007) Multiscale modeling of
point and line defects in cubic crystals. Int J Multiscale
Comput Eng 5:203–226
[18] Emmerich H (2003) The diffuse interface approach in
materials science: thermodynamic concepts and applica-
tions of phase-field models. Springer, Berlin
[19] Schoenfeld SE, Wright TW (2003) A failure criterion based
on material instability. Int J Solids Struct 40:3021–3037
[20] Wallace DC (2003) Statistical physics of crystals and liq-
uids: a guide to highly accurate equations of state. World
Scientific, Singapore
[21] Clayton JD, Tonge A (2015) A nonlinear anisotropic
elastic–inelastic constitutive model for polycrystalline
ceramics and minerals with application to boron carbide. Int
J Solids Struct 64–65:191–207
[22] Bunge H-J (1982) Texture analysis in materials science:
mathematical methods. Butterworths, London
[23] Randle V, Engler O (2000) Introduction to texture analysis:
macrotexture, microtexture, and orientation mapping.
Gordon and Breach, Amsterdam
[24] Grimmer H, Bollmann W, Warrington DH (1974) Coinci-
dent-site lattices and complete pattern-shift lattices in cubic
crystals. Acta Crystallogr A 30:197–207
[25] Watanabe T (1984) An approach to grain boundary design
for strong and ductile polycrystals. Res Mech 11:47–84
[26] Roters F, Eisenlohr P, Hantcherli L, Tjahjanto DD, Bieler
TR, Raabe D (2010) Overview of constitutive laws, kine-
matics, homogenization and multiscale methods in crystal
plasticity finite-element modeling: theory, experiments,
applications. Acta Mater 58:1152–1211
[27] Clayton JD, Kraft RH, Leavy RB (2012) Mesoscale mod-
eling of nonlinear elasticity and fracture in ceramic poly-
crystals under dynamic shear and compression. Int J Solids
Struct 49:2686–2702
[28] Clayton JD (2013a) Mesoscale modeling of dynamic
compression of boron carbide polycrystals. Mech Res
Commun 49:57–64
[29] Clayton JD, McDowell DL (2003a) A multiscale multi-
plicative decomposition for elastoplasticity of polycrystals.
Int J Plast 19:1401–1444
[30] Clayton JD, Knap J (2015a) Phase field modeling of
directional fracture in anisotropic polycrystals. Comput
Mater Sci 98:158–169
[31] Clayton JD (2013b) Nonlinear Eulerian thermoelasticity for
anisotropic crystals. J Mech Phys Solids 61:1983–2014
[32] Clayton JD (2014a) Analysis of shock compression of
strong single crystals with logarithmic thermoelastic–plas-
tic theory. Int J Eng Sci 79:1–20
[33] Thurston RN (1974) Waves in solids. In: Truesdell C (ed)
Handbuch der Physik, vol 4. Springer, Berlin, pp 109–308
[34] Teodosiu C (1982) Elastic models of crystal defects.
Springer, Berlin
[35] Clayton JD (2014b) Shock compression of metal crystals: a
comparison of Eulerian and Lagrangian elastic–plastic
theories. Int J Appl Mech 6:1450048
[36] Clayton JD (2015b) Crystal thermoelasticity at extreme
loading rates and pressures: analysis of higher-order energy
potentials. Mech Lett 3:113–122
[37] Meyers MA, Ashworth E (1982) A model for the effect of
grain size on the yield stress of metals. Philos Mag A
46:737–759
J Mater Sci (2018) 53:5515–5545 5541

[38] Clayton JD, Schroeter BM, Graham S, McDowell DL
(2002) Distributions of stretch and rotation in OFHC Cu.
J Eng Mater Technol 124:302–313
[39] Harren SV, Deve HE, Asaro RJ (1988) Shear band for-
mation in plane strain compression. Acta Metall
36:2435–2480
[40] Harren SV, Asaro RJ (1989) Nonuniform deformations in
polycrystals and aspects of the validity of the Taylor model.
J Mech Phys Solids 37(2):191–232
[41] Clayton JD (2009a) Modeling effects of crystalline
microstructure, energy storage mechanisms, and residual
volume changes on penetration resistance of precipitate-
hardened aluminum alloys. Compos B Eng 40:443–450
[42] Needleman A, Asaro RJ, Lemonds J, Peirce D (1985) Finite
element analysis of crystalline solids. Comput Methods
Appl Mech Eng 52:689–708
[43] Zikry MA, Kao M (1996) Inelastic microstructural failure
mechanisms in crystalline materials with high angle grain
boundaries. J Mech Phys Solids 44:1765–1798
[44] Ortiz M, Suresh S (1993) Statistical properties of residual
stresses and intergranular fracture in ceramic materials.
J Appl Mech 60:77–84
[45] Espinos HD, Zavattieri PD (2003a) A grain level model for
the study of failure initiation and evolution in polycrys-
talline brittle materials. Part I theory and numerical
implementation. Mech Mater 35:333–364
[46] Pathak S, Michler J, Wasmer K, Kalidindi SR (2012)
Studying grain boundary regions in polycrystalline materials
using spherical nano-indentation and orientation imaging
microscopy. J Mater Sci 47:815–823. doi: 10.1007/s10853-
011-5859-z
[47] Grinfeld M (1991) Thermodynamic methods in the theory
of heterogeneous systems. Longman Scientific and Tech-
nical, Sussex
[48] Abeyaratne R, Knowles JK (1990) On the driving traction
acting on a surface of strain discontinuity in a continuum.
J Mech Phys Solids 38:345–360
[49] Abeyaratne R, Knowles JK (1991) Kinetic relations and the
propagation of phase boundaries in solids. Arch Ration
Mech Anal 114:119–154
[50] Read WT, Shockley W (1950) Dislocation models of
crystal grain boundaries. Phys Rev 78:275–289
[51] Mughrabi H (1983) Dislocation wall and cell structures and
long-range internal stresses in deformed metal crystals.
Acta Metall 31:1367–1379
[52] Rezvanian O, Zikry MA, Rajendran AM (2007) Statisti-
cally stored, geometrically necessary and grain boundary
dislocation densities: microstructural representation and
modelling. Proc R Soc Lond A 463:2833–2853
[53] Clayton JD, McDowell DL, Bammann DJ (2006) Modeling
dislocations and disclinations with finite micropolar
elastoplasticity. Int J Plast 22:210–256
[54] Clayton JD, Bammann DJ, McDowell DL (2004a)
Anholonomic configuration spaces and metric tensors in
finite strain elastoplasticity. Int J Non Linear Mech
39:1039–1049
[55] Clayton JD (2012a) On anholonomic deformation, geom-
etry, and differentiation. Math Mech Solids 17:702–735
[56] Clayton JD (2014c) Differential geometry and kinematics
of continua. World Scientific, Singapore
[57] Steinmann P (2015) Geometrical foundations of continuum
mechanics. Springer, Berlin
[58] Regueiro RA, Bammann DJ, Marin EB, Garikipati K
(2002) A nonlocal phenomenological anisotropic finite
deformation plasticity model accounting for dislocation
defects. J Eng Mater Technol 124:380–387
[59] Clayton JD, McDowell DL, Bammann DJ (2004b) A
multiscale gradient theory for elastoviscoplasticity of single
crystals. Int J Eng Sci 42:427–457
[60] Admal NC, Po G, Marian J (2017) Diffuse-interface poly-
crystal plasticity: expressing grain boundaries as geomet-
rically necessary dislocations. Mater Theory 1:1–16
[61] Li JCM (1972) Disclination model of high angle grain
boundaries. Surf Sci 31:12–26
[62] Clayton JD, Bammann DJ, McDowell DL (2005) A geo-
metric framework for the kinematics of crystals with
defects. Philos Mag 85:3983–4010
[63] Steinmann P (2013) On the roots of continuum mechanics
in differential geometry. In: Altenbach H, Eremeyev VA
(eds) Generalized continua-from the theory to engineering
applications. Springer, Udine, pp 1–64
[64] Clayton JD (2015c) Defects in nonlinear elastic crystals:
differential geometry, finite kinematics, and second-order
analytical solutions. Z Angew Math Mech ZAMM)
95:476–510
[65] Upadhyay M, Capolungo L, Taupin V, Fressengeas C
(2011) Grain boundary and triple junction energies in
crystalline media: a disclination based approach. Int J
Solids Struct 48:3176–3193
[66] Sun XY, Cordier P, Taupin V, Fressengeas C, Jahn S (2016)
Continuous description of a grain boundary in forsterite
from atomic scale simulations: the role of disclinations.
Philo Mag 96:1757–1772
[67] Gerken JM, Dawson PR (2008) A crystal plasticity model
that incorporates stresses and strains due to slip gradients.
J Mech Phys Solids 56:1651–1672
[68] Luscher DJ, Mayeur JR, Mourad HM, Hunter A, Kena-
mond MA (2016) Coupling continuum dislocation
5542 J Mater Sci (2018) 53:5515–5545

transport with crystal plasticity for application to shock
loading conditions. Int J Plast 76:111–129
[69] Clayton JD, Hartley CS, McDowell DL (2014) The missing
term in the decomposition of finite deformation. Int J Plast
52:51–76
[70] Clayton JD (2014d) An alternative three-term decomposi-
tion for single crystal deformation motivated by non-linear
elastic dislocation solutions. Q J Mech Appl Math
67:127–158
[71] Clayton JD, Bammann DJ (2009) Finite deformations and
internal forces in elastic–plastic crystals: interpretations
from nonlinear elasticity and anharmonic lattice statics.
J Eng Mater Technol 131:041201
[72] Toupin RA, Rivlin RS (1960) Dimensional changes in
crystals caused by dislocations. J Math Phys 1:8–15
[73] Clayton JD (2009b) A continuum description of nonlinear
elasticity, slip and twinning, with application to sapphire.
Proc R Soc Lond A 465:307–334
[74] Clayton JD (2009c) A non-linear model for elastic dielec-
tric crystals with mobile vacancies. Int J Non Linear Mech
44:675–688
[75] Abdollahi A, Arias I (2012) Numerical simulation of
intergranular and transgranular crack propagation in ferro-
electric polycrystals. Int J Fract 174:3–15
[76] Fan D, Chen L-Q (1997) Computer simulation of grain
growth using a continuum field model. Acta Mater
45:611–622
[77] Allen SM, Cahn JW (1979) A microscopic theory for
antiphase boundary motion and its application to antiphase
domain coarsening. Acta Metall 27:1085–1095
[78] Abrivard G, Busso EP, Forest S, Appolaire B (2012a) Phase
field modelling of grain boundary motion driven by cur-
vature and stored energy gradients. Part I: theory and
numerical implementation. Philos Mag 92:3618–3642
[79] Abrivard G, Busso EP, Forest B, Appolaire S (2012b)
Phase field modelling of grain boundary motion driven by
curvature and stored energy gradients. Part II: application to
recrystallisation. Philos Mag 92:3643–3664
[80] James RD (1981) Finite deformation by mechanical twin-
ning. Arch Ration Mech Anal 77:143–176
[81] Zanzotto G (1996) The Cauchy–Born hypothesis, nonlinear
elasticity and mechanical twinning in crystals. Acta Crys-
tallogr A 52:839–849
[82] Bilby BA, Crocker AG (1965) The theory of the crystal-
lography of deformation twinning. Proc R Soc Lond A
288:240–255
[83] Barton NR, Winter NW, Reaugh JE (2009) Defect evolu-
tion and pore collapse in crystalline energetic materials.
Modelling Simul Mater Sci Eng 17:035003
[84] Clayton JD, Becker R (2012) Elastic–plastic behavior of
cyclotrimethylene trinitramine single crystals under spher-
ical indentation: modeling and simulation. J Appl Phys
111:063512
[85] Bhattacharya K (2003) Microstructure of martensite: why it
forms and how it gives rise to the shape-memory effect.
Oxford University Press, New York
[86] Hou TY, Rosakis P, LeFloch P (1999) A level-set approach
to the computation of twinning and phase-transition
dynamics. J Comput Phys 150:302–331
[87] Chin GY, Hosford WF, Mendorf DR (1969) Accommoda-
tion of constrained deformation in FCC metals by slip and
twinning. Proc R Soc Lond A 309:433–456
[88] Van Houtte P (1978) Simulation of the rolling and shear
texture of brass by the Taylor theory adapted for mechan-
ical twinning. Acta Metall 26:591–604
[89] Kalidindi SR (1998) Incorporation of deformation twinning
in crystal plasticity models. J Mech Phys Solids
46:267–290
[90] Staroselsky A, Anand L (1998) Inelastic deformation of
polycrystalline face centered cubic materials by slip and
twinning. J Mech Phys Solids 46:671–696
[91] Clayton JD (2010a) Modeling finite deformations in trig-
onal ceramic crystals with lattice defects. Int J Plast
26:1357–1386
[92] Mirkhani H, Joshi SP (2014) Mechanism-based crystal
plasticity modeling of twin boundary migration in nan-
otwinned face-centered-cubic metals. J Mech Phys Solids
68:107–133
[93] Clayton JD, Knap J (2011a) A phase field model of
deformation twinning: nonlinear theory and numerical
simulations. Physica D 240:841–858
[94] Hu SY, Henager CH, Chen L-Q (2010) Simulations of
stress-induced twinning and de-twinning: a phase field
model. Acta Mater 58:6554–6564
[95] Heo TW, Wang Y, Bhattacharya S, Sun X, Hu S, Chen L-Q
(2011) A phase-field model for deformation twinning.
Philos Mag Lett 91:110–121
[96] Bhattacharya K (1993) Comparison of the geometrically
nonlinear and linear theories of martensitic transformation.
Contin Mech Thermodyn 5:205–242
[97] Clayton JD, Knap J (2011b) Phase field modeling of
twinning in indentation of transparent single crystals.
Modelling Simul Mater Sci Eng 19:085005
[98] Clayton JD, Knap J (2013) Phase field analysis of fracture
induced twinning in single crystals. Acta Mater
61:5341–5353
[99] Hildebrand FE, Miehe C (2012) A phase field model for the
formation and evolution of martensitic laminate
microstructure at finite strains. Philos Mag 92:4250–4290
J Mater Sci (2018) 53:5515–5545 5543

[100] Clayton JD, Knap J (2015b) Nonlinear phase field theory
for fracture and twinning with analysis of simple shear.
Philos Mag 95:2661–2696
[101] Kondo R, Tadano Y, Shizawa K (2014) A phase-field
model of twinning and detwinning coupled with disloca-
tion-based crystal plasticity for HCP metals. Comput Mater
Sci 95:672–683
[102] Li X, Wei Y, Lu L, Lu K, Gao H (2010) Dislocation
nucleation governed softening and maximum strength in
nano-twinned metals. Nature 464:877–880
[103] Yang L, Dayal K (2010) Formulation of phase-field ener-
gies for microstructure in complex crystal structures. Appl
Phys Lett 96:081916
[104] Agrawal V, Dayal K (2015a) A dynamic phase-field model
for structural transformations and twinning: regularized
interfaces with transparent prescription of complex kinetics
and nucleation. part I: formulation and one-dimensional
characterization. J Mech Phys Solids 85:270–290
[105] Agrawal V, Dayal K (2015b) A dynamic phase-field model
for structural transformations and twinning: regularized
interfaces with transparent prescription of complex kinetics
and nucleation. part II: two-dimensional characterization
and boundary kinetics. J Mech Phys Solids 85:291–307
[106] Schultz MC, Jensen RA, Bradt RC (1994) Single crystal
cleavage of brittle materials. Int J Fract 65:291–312
[107] Clayton JD (2008) A model for deformation and frag-
mentation in crushable brittle solids. Int J Impact Eng
35:269–289
[108] Antoun T (2003) Spall fracture. Springer, New York
[109] Dugdale DS (1960) Yielding of steel sheets containing slits.
J Mech Phys Solids 8:100–104
[110] Barenblatt GI (1962) The mathematical theory of equilib-
rium cracks in brittle fracture. Adv Appl Mech 7:55–129
[111] Needleman A (1987) A continuum model for void nucle-
ation by inclusion debonding. J Appl Mech 54:525–531
[112] Xu X-P, Needleman A (1993) Void nucleation by inclusion
debonding in a crystal matrix. Modelling Simul Mater Sci
Eng 1:111–132
[113] Clayton JD, McDowell DL (2004) Homogenized finite
elastoplasticity and damage: theory and computations.
Mech Mater 36:799–824
[114] Xu X-P, Needleman A (1994) Numerical simulations of fast
crack growth in brittle solids. J Mech Phys Solids
42:1397–1434
[115] Clayton JD (2005a) Dynamic plasticity and fracture in high
density polycrystals: constitutive modeling and numerical
simulation. J Mech Phys Solids 53:261–301
[116] Clayton JD (2005b) Modeling dynamic plasticity and spall
fracture in high density polycrystalline alloys. Int J Solids
Struct 42:4613–4640
[117] Vogler TJ, Clayton JD (2008) Heterogeneous deformation
and spall of an extruded tungsten alloy: plate impact
experiments and crystal plasticity modeling. J Mech Phys
Solids 56:297–335
[118] Espinosa HD, Zavattieri PD (2003b) A grain level model
for the study of failure initiation and evolution in poly-
crystalline brittle materials. Part II: numerical examples.
Mech Mater 35:365–394
[119] Kraft RH, Molinari JF (2008) A statistical investigation of
the effects of grain boundary properties on transgranular
fracture. Acta Mater 56:4739–4749
[120] Foulk JW, Vogler TJ (2010) A grain-scale study of spall in
brittle materials. Int J Fract 163:225–242
[121] Krajcinovic D (1996) Damage mechanics. Elsevier,
Amsterdam
[122] Voyiadjis GZ, Kattan PI (2005) Damage mechanics. CRC
Press, Boca Raton
[123] Kachanov LM (1958) Time of the rupture process under
creep conditions. Isv Akad Nauk SSR Otd Tekh Nauk
8:26–31
[124] Bammann DJ, Solanki KN (2010) On kinematic, thermo-
dynamic, and kinetic coupling of a damage theory for
polycrystalline material. Int J Plast 26:775–793
[125] Del Piero G, Owen DR (1993) Structured deformations of
continua. Arch Ration Mech Anal 124:99–155
[126] Clayton JD (2006) Continuum multiscale modeling of finite
deformation plasticity and anisotropic damage in poly-
crystals. Theor Appl Fract Mech 45:163–185
[127] Clayton JD, McDowell DL (2003b) Finite polycrystalline
elastoplasticity and damage: multiscale kinematics. Int
Solids Struct 40:5669–5688
[128] Clayton JD (2010b) Deformation, fracture, and fragmen-
tation in brittle geologic solids. Int J Fract 163:151–172
[129] Bammann DJ, Aifantis EC (1989) A damage model for
ductile metals. Nucl Eng Des 116:355–362
[130] Aslan O, Cordero NM, Gaubert A, Forest S (2011)
Micromorphic approach to single crystal plasticity and
damage. Int J Eng Sci 49:1311–1325
[131] Jin YM, Wang YU, Khachaturyan AG (2001) Three-di-
mensional phase field microelasticity theory and modeling
of multiple cracks and voids. Appl Phys Lett 79:3071–3073
[132] Karma A, Kessler DA, Levine H (2001) Phase-field model
of mode III dynamic fracture. Phys Rev Lett 87:045501
[133] Del Piero G, Lancioni G, March R (2007) A variational
model for fracture mechanics: numerical experiments.
J Mech Phys Solids 55:2513–2537
[134] Clayton JD, Knap J (2014) A geometrically nonlinear phase
field theory of brittle fracture. Int J Fract 189:139–148
5544 J Mater Sci (2018) 53:5515–5545

[135] Clayton JD, Knap J (2016) Phase field modeling of coupled
fracture and twinning in single crystals and polycrystals.
Comput Methods Appl Mech Eng 312:447–467
[136] Spatschek R, Brener E, Karma A (2011) Phase field mod-
eling of crack propagation. Philos Mag 91:75–95
[137] Borden MJ, Verhoosel CV, Scott MA, Hughes TJR, Landis
CM (2012) A phase-field description of dynamic brittle
fracture. Comput Methods Appl Mech Eng 217:77–95
[138] Agrawal V, Dayal K (2017) Dependence of equilibrium
Griffith surface energy on crack speed in phase-field
models for fracture coupled to elastodynamics. Int J Fract
207:243–249
[139] McAuliffe C, Waisman H (2015) A unified model for metal
failure capturing shear banding and fracture. Int J Plast
65:131–151
[140] Wright TW, Ockendon H (1992) A model for fully formed
shear bands. J Mech Phys Solids 40:1217–1226
[141] Wright TW, Walter JW (1996) The asymptotic structure of
an adiabatic shear band in antiplane motion. J Mech Phys
Solids 44:77–97
[142] Clayton JD (2017a) Finsler geometry of nonlinear elastic
solids with internal structure. J Geom Phys 112:118–146
[143] Clayton JD (2014e) Phase field theory and analysis of
pressure-shear induced amorphization and failure in boron
carbide ceramic. AIMS Mater Sci 1:143–158
[144] Clayton JD (2017b) Generalized finsler geometric contin-
uum physics with applications in fracture and phase
transformations. Z Angew Math Phys (ZAMP) 68:9
[145] Clayton JD (2012b) Towards a nonlinear elastic represen-
tation of finite compression and instability of boron carbide
ceramic. Philos Mag 92:2860–2893
[146] Clayton JD (2016a) Finsler-geometric continuum mechan-
ics. Technical Report ARL-TR-7694, US Army Research
Laboratory, Aberdeen Proving Ground MD
[147] Kenway PR (1993) Calculated stacking-fault energies in a-
Al2O3. Philos Mag B 68:171–183
[148] Clayton JD (2010c) Modeling nonlinear electromechanical
behavior of shocked silicon carbide. J Appl Phys
107:013520
[149] Clayton JD (2011b) A nonlinear thermomechanical model
of spinel ceramics applied to aluminum oxynitride (AlON).
J Appl Mech 78:011013
[150] Clayton JD (2016b) Finsler-geometric continuum
mechanics and the micromechanics of fracture in crystals.
J Micromech Mol Phys 1:164003
[151] Clayton JD (2017) Finsler-geometric continuum dynamics
and shock compression. Int J Fract. doi:10.1007/s10704-
017-0211-5
[152] Saczuk J (1996) Finslerian foundations of solid mechanics.
Polskiej Akademii Nauk, Gdansk
[153] Stumpf H, Saczuk J (2000) A generalized model of oriented
continuum with defects. Z Angew Math Mech (ZAMM)
80:147–169
[154] Sethian JA (1999) Level set methods and fast marching
methods: evolving interfaces in computational geometry,
fluid mechanics, computer vision, and materials science.
Cambridge University Press, Cambridge
[155] Steinbach I (2009) Phase-field models in materials science.
Modelling Simul Mater Sci Eng 17:073001
[156] Chen L-Q (2002) Phase-field models for microstructure
evolution. Ann Rev Mater Res 32:113–140
J Mater Sci (2018) 53:5515–5545 5545

Approved for public release; distribution is unlimited. 32
1 DEFENSE TECHNICAL (PDF) INFORMATION CTR DTIC OCA 2 DIR ARL (PDF) IMAL HRA RECORDS MGMT RDRL DCL TECH LIB 1 GOVT PRINTG OFC (PDF) A MALHOTRA 48 ARL (PDF) RDRL CIH C J KNAP RDRL D M TSCHOPP RDRL DP T BJERKE RDRL WM B FORCH S KARNA A RAWLETT S SCHOENFELD J ZABINSKI J MCCAULEY RDRL WML B I BATYREV R PESCE-RODRIGUEZ B RICE D TAYLOR N WEINGARTEN RDRL WML H D MALLICK C MEYER B SCHUSTER RDRL WMM J BEATTY RDRL WMM B G GAZONAS D HOPKINS B LOVE B POWERS T SANO R WILDMAN RDRL WMM E J LASALVIA J SWAB RDRL WMM G J ANDZELM RDRL WMP A S BILYK RDRL WMP B C HOPPEL J MCDONALD
M SCHEIDLER T WEERISOORIYA RDRL WMP C R BECKER D CASEM J CLAYTON M FERMEN-COKER M GREENFIELD R LEAVY J LLOYD C MEREDITH S SATAPATHY S SEGLETES A SOKOLOW A TONGE C WILLIAMS RDRL WMP D R DONEY C RANDOW RDRL WMP E B AYDELOTTE






![Parameterizations in CMC NWP ModelsParameterizations in CMC NWP Models (from Physical Parameterizations in Canadian Operational Models, S. Bélair) Molinari [1] defines mesoscale models](https://static.fdocuments.net/doc/165x107/6004b49799a5b01e6e13c589/parameterizations-in-cmc-nwp-models-parameterizations-in-cmc-nwp-models-from-physical.jpg)