MEMS Technology - Enabling Design Flexibility for Fine ...
32
MEMS Technology - Enabling Design Flexibility for Fine Pitch Probing Bahadir Tunaboylu, PhD & Gerry Back SV Probe, Inc. 2120 W Guadalupe Rd Ste 112 Gilbert, AZ 85233 June 7-10, 2009 San Diego, CA
Transcript of MEMS Technology - Enabling Design Flexibility for Fine ...

MEMS Technology - Enabling Design Flexibility for Fine Pitch Probing
Bahadir Tunaboylu, PhD& Gerry Back
SV Probe, Inc.2120 W Guadalupe Rd Ste 112
Gilbert, AZ 85233
June 7-10, 2009San Diego, CA

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 22
Outline Introduction
Emerging fine pitch peripheral & array test requirements at 60µm pitch Design perspective & probing multiple DUTs by cantilever vs. vertical probe Contact model for vertical probe contacts to control bond pad damage
Method & Systems for Characterization Hertzian contact mechanics & Holm electrical contact model Instrumentation & software
Test Results & Analysis MEMS-based vertical technology contact performance for various contact
metallurgies on wafers Contact on aluminum, copper & lead-tin Contact resistance as a function of contact force & current
Summary & Follow-on Work

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 33
Fine Pitch Probing Cantilever probing approaches, both traditional
& MEMS-cantilever, have limitations for multidut probing at 60µm-pitch : Number of rows of bond pads are limited, dependent
heavily on pad density Corner keep-out in device layouts Requires skip-DUT configurations, compromising test
stepping efficiency Vertical probing technology approaches allow
more rows of peripheral pads & array patterns

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 44
CantileverCantilever
VerticalVertical
Probing Technology & Design CapabilityMEMSMEMS--VerticalVertical
1, 2
Row
Per
iphe
ral L
ayou
ts
Arr
ay L
ayou
ts
1-row Peripheral Multi-dut 3
Row
Per
iphe
ral l
ayou
ts

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 55
Cantilever TechnologiesCantilever Technologies Vertical- Buckling BeamVertical- Buckling Beam MEMS Fine Pitch VerticalMEMS Fine Pitch Vertical
Probing Technology & Scrub on Pads
MEMS Cantilever

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 66
Fine Pitch Probing
Fine pitch probing requires precise control of alignment at pad sizes of 45µmx45µm Contact model for vertical probe contacts
is different than cantilever style beams Scrub marks generated by cantilever beams
by design is typically longer than marks by vertical probes
Accurate guiding of probes permits finer controls & precise scrub marks for Vertical. The tolerances on guiding holes as well as probes are critical for positions
Probe action, scrub mark size & depth must be precisely controlled to prevent damage to bond pads & low-k dielectrics Study scrub behavior, determine scrub
length, width, depth & also the debris pile created
Vertical- Buckling BeamVertical- Buckling Beam
MEMS Fine Pitch VerticalMEMS Fine Pitch Vertical

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 77
Methodology for Analysis Contact Model
Hertzian Contact Mechanics Software model is developed for predictive scrub behavior on various
wafer pad metallurgies, based on VB code Simplified Holm electrical contact model
Test systems for scrub mark & contact resistance characterization Instrumentation
Probe: TEL P12 XLn Keithley Tester & Source Meter Nikon Optical Inspection System Veeco Profilometer Test Wafers: Al, Cu, PbSn Probing Technology: MEMS-Fine Pitch Vertical Technology
(LogicTouch™)

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 88
MEMS-Fine Pitch Vertical Probing Technology for Contact Study
1
3 24
1. Probes2. Space Transformer (MLC)3. Interposer4. PCB
ProbesProbes
60/30µm layout is shown Technology scalable to 50µm & 40µm pitch Supports much higher speeds & bandwidth compared to cantilever technologies

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 99
Probe Contact Contact Model
Hertzian Contact Mechanics: Hertz’s classical solution provides the foundation in contact mechanics of solid pairs (of two surfaces). The size & depth of an indentation of a probe into a flat surface can be estimated by Hertz contact stresses. GW model based on Hertz theory is assumed where the probe tip of radius rindents a flat plane to depth d, creates a contact area of radius a = √rd . The force equation
F = 4/3 Er1/2 (zs – d)3/2
Where zs is the normalized summit height & elastic modulus E of the equivalent surface is given as
1/E = (1-ν12)/E1 + (1- ν2
2)/E2Where v is the Poisson’s ratio & two bodies of 1 & 2
Surfaces are rough & the apparent contact area between a probe tip & the pad is not the actual load bearing area due to asperities. The real area of contact is found as, Ar/Aa = 1 - 3%
Metallic surfaces also have insulating films. Real intimate contact & load bearing area is actually much smaller & the electrical conduction is achieved through these a-spots, conducting contact areas. Holm defined the electrical contact model using this constriction resistance, Rf = ρ/Ac , between contacting members by extension of Ohm’s law.
Predict scrub mark by known properties of probe materials, pad materials & geometry
Radius a of Conducting Spot
Probe Force
Spherical Tip of radius r
Wafer Pad
Model of Surface Roughness

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1010
Contact Model Results for Aluminum
Scrub depth as a function of probe force. Assumes a hemispherical probe tip.
Input ParametersFPV Probe tip: 4um radius
Overdrive: 63.5um
Force: 7 g
Pad: Al
Results

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1111
Contact Model Results on Copper
Input ParametersProbe tip: 4um radius
Overdrive: 63.5um
Force: 7 g
Pad: Cu
Results
Scrub depth as a function of probe force. Assumes a hemispherical probe tip.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1212
Contact Model Results on PbSn
Input ParametersProbe tip: 4um radius
Overdrive: 63.5um
Force: 7 g
Pad (Bump): PbSn
Results
Scrub depth as a function of probe force. Assumes a hemispherical probe tip.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1313
Experimental Scrub Characterization Scrub marks by standard cantilever & vertical
technologiesFPV Scrub Characterization
Comparative study of multiple TDs on Al & Cu padsScrub dimensions were measuredTwo different tip diameters were studied
Contact resistance behavior was also investigatedContact resistance (Cres) was measured per TD & as a function
of overdrive to determine the onset of frittingCres was measured during lifecycle experiments monitoring
stability for Al, Cu as well as PbSn

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1414
Conditions:
50µm O.D
Force: 2.3 g @ 50µm
3-milØ WRe
10µm Tip Diameter
Aluminum Wafer
Cantilever Technology Scrub Marks
Veeco ProfilometerVeeco Profilometer
Scrub: 25umx10µm

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1515
Vertical Technology Scrub Marks
125 µm O.D
3-milØ Pointed Probe
13 µm Tip
Aluminum Wafer
Conditions:

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1616
Test Results for FPV: Resistance Comparison for Different Pad Materials
0.5
0.75
1
1.25
1.5
Aver
age
Ohm
s
Aluminum Copper SolderMaterial
AluminumCopperSolder
Level444
Number1.081460.868410.96307
Mean0.066560.066560.06656
Std Error0.930900.717850.81250
Lower 95%1.23201.01901.1136
Upper 95%
Means for Oneway Anova
Oneway Anova
Oneway Analysis of Average By Material
Baseline ResistanceBaseline Resistance
Contact resistance values are path resistance measurements & not normalized

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1717
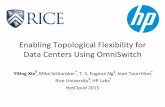
Cres Behavior on Al Resistance vs Overdrive on Aluminum
0
2
4
6
8
10
12
14
16
18
20
0.5 1 1.5 2 2.5 3 2.5 2 1.5 1 0.5
Overdrive (mils)
Ohm
s
1 mA 50 mA 100 mA 200 mA
Contact resistance as a function of overdrive for current values of 1, 50, 100 & 200 mA. It appears that the fritting takes place below 1 mil OD, the fritting ratio drops as the OD increases.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1818
Cres Testing on Al
Contact resistance results up to 1M TDs. Resistance is the path resistance including the Cres.
LIFE TEST RESISTANCE ON ALUMINUM WAFER 2.5 MIL OD
0.00.10.20.30.40.50.60.70.80.91.01.11.21.31.41.5
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
PROBE NUMBER
RES
ISTA
NC
E (O
hm)
0 (Ohm)50K (Ohm)150K (Ohm)288K (Ohm)313K (Ohm)338K (Ohm)363K (Ohm)388K (Ohm)413K (Ohm)438K (Ohm)463K (Ohm)488K (Ohm)513K (Ohm)563K (Ohm)628K (Ohm)673K (Ohm)773K (Ohm)873K (Ohm)1000K (Ohm)

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 1919
Cres Behavior on Cu
Contact resistance as a function of overdrive for current values of 1, 50, 100 & 200 mA. Resistance is the path resistance including the Cres.Cres unstable below 1 mil OD & stabilizes at higher OD.
Resistance vs. Overdrive on Copper
0
1
2
3
4
5
6
7
8
9
10
0.5 1 1.5 2 2.5 3 2.5 2 1.5 1 0.5
Overdrive (mils)
Ohm
s
1 mA 50 mA 100 mA 200 mA

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2020
Cres Testing on Cu
Contact resistance results up to 100K TDs. Resistance is the path resistance including the Cres.
Path Resistance on Copper Wafer
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
50
5000
1000
0
1500
0
2000
0
2500
0
3000
0
3500
0
4000
0
4500
0
5000
0
5500
0
6000
0
6500
0
7000
0
7500
0
8000
0
8500
0
9000
0
9500
0
1000
00
Touchdowns
Ohm
s
After Clean Before Clean

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2121
Cres Testing on PbSnPath Resistance on Solder Lead-Tin
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0
5000
1000
0
1500
0
2020
0
2540
0
3000
0
3500
0
4000
0
4500
0
5000
0
5500
0
6000
0
6500
0
7000
0
7500
0
8020
0
8500
0
9000
0
9500
0
1000
00
Touchdowns
Ohm
s
After Clean Before Clean
Contact resistance results up to 100K TDs. Resistance is the path resistance including the Cres.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2222
Comparing Means of Scrub Depth for Al & Cu
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Scru
b D
epth
Al
Mic
rons
1 4 8 12Touchdow ns
14812
Level10101010
Number0.5110000.6232000.7706000.884800
Mean0.049340.049340.049340.04934
Std Error0.410930.523130.670530.78473
Lower 95%0.611070.723270.870670.98487
Upper 95%
Means for Oneway Anova
Oneway Anova
Scrub Depth versus Touchdowns on Aluminum
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Scru
b D
epth
Cu
Mic
rons
1 4 8 12Touchdow ns
14812
Level10101010
Number0.5421000.5687000.6144000.677000
Mean0.023890.023890.023890.02389
Std Error0.493650.520250.565950.62855
Lower 95%0.590550.617150.662850.72545
Upper 95%
Means for Oneway Anova
Oneway Anova
Scrub Depth versus Touchdowns on Copper
Fit Y by X Group
Scrub depth on Al & Cu for 1, 4, 8 & 12 TDs on the same spot. Probe tip diameter is 8 µm.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2323
Comparing Means of Scrub Depth
Scrub depth on Al & Cu for 1, 4, 8 & 12 TDs on the same spot. Probe tip diameter is 10 µm.
0.3
0.4
0.5
0.6
0.7
0.8
Scru
b D
epth
Al
mic
ron
1 4 8 12Touchdow ns
Missing Row s 2
14812
Level109
109
Number0.4598000.5062220.5401000.531111
Mean0.031470.033170.031470.03317
Std Error0.395840.438810.476140.46370
Lower 95%0.523760.573640.604060.59853
Upper 95%
Means for Oneway Anova
Oneway Anova
Scrub Depth versus Touchdowns on Al (10 um Tips)
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Scru
b D
epth
Cu
Mic
ron
1 4 8 12Touchdow ns
Missing Row s 1
14812
Level10109
10
Number0.4292000.5754000.5458890.564800
Mean0.027140.027140.028610.02714
Std Error0.374110.520310.487820.50971
Lower 95%0.484290.630490.603960.61989
Upper 95%
Means for Oneway Anova
Oneway Anova
Scrub Depth versus Touchdowns on Cu (10 um Tips)
Fit Y by X Group

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2424
Comparing Means of Debris Pile Height
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
Deb
risi H
eigh
t Al
Mic
rons
1 4 8 12Touchdow ns
Missing Row s 2
14812
Level8
101010
Number0.3310000.4678000.5527000.781600
Mean0.057110.051080.051080.05108
Std Error0.214940.363990.448890.67779
Lower 95%0.447060.571610.656510.88541
Upper 95%
Std Error uses a pooled estimate of error variance
Means for Oneway Anova
Oneway Anova
Scrub Debris Pile Height on Aluminum
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
Deb
ris H
eigh
t Cu
Mic
rons
1 4 8 12Touchdow ns
14812
Level10101010
Number0.3367000.3914000.4498000.355800
Mean0.040230.040230.040230.04023
Std Error0.255110.309810.368210.27421
Lower 95%0.418290.472990.531390.43739
Upper 95%
Std Error uses a pooled estimate of error variance
Means for Oneway Anova
Oneway Anova
Scrub Debris Pile Height on Copper
Fit Y by X Group
Scrub pile height on Al & Cu for 1, 4, 8 & 12 TDs on the same spot. Probe tip diameter is 8 µm.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2525
Comparing Means of Scrub Diameter
9
9.5
10
10.5
11
11.5
12
Scr
ub D
iam
eter
Al
mic
rons
1 4 8 12Touchdowns
14812
Level10101010
Number9.79009.67009.8200
10.1800
Mean0.129550.129550.129550.12955
Std Error9.52739.40739.55739.9173
Lower 95%10.0539.933
10.08310.443
Upper 95%
Std Error uses a pooled estimate of error variance
Means for Oneway Anova
Oneway Anova
Scrub Diameter versus Touchdowns on Aluminum
9
9.5
10
10.5
11
11.5
12
Scr
ub D
iam
eter
Cu
mic
rons
1 4 8 12Touchdowns
14812
Level10101010
Number10.020010.580010.980011.0400
Mean0.124860.124860.124860.12486
Std Error9.767
10.32710.72710.787
Lower 95%10.27310.83311.23311.293
Upper 95%
Std Error uses a pooled estimate of error variance
Means for Oneway Anova
Oneway Anova
Scrub Diameter versus Touchdowns on Copper
Fit Y by X Group
Scrub diameter on Al & Cu for 1, 4, 8 & 12 TDs on the same spot. Probe tip diameter is 8 µm.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2626
Scrub Optical Images on Al at 1 vs 4 TDs
Scrub marks on Al imaged optically

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2727
3D Scan for Multiple Touchdowns on Al
1 TD1 TD 4 TD4 TD
12TD12TD8 TD8 TD

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2828
DepthDepth
DiameterDiameter
Debris HeightDebris Height
2D Scan 1TD Case for Al

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 2929
Scrub Optical Images on Cu at 1 vs 4 TDs
Scrub marks on Cu imaged optically.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 3030
3D Scan for Multiple Touchdowns on Cu
1 TD1 TD 4 TD4 TD
12TD12TD8 TD8 TD

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 3131
Summary For fine pitch multidut requirements, vertical probe technologies
provide advantages over cantilever approaches with design flexibilities MEMS-based vertical technology has an edge over buckling beam technologies
for design flexibility for highly parallel peripheral devices as well as accuracy of scrub signatures required for smaller pad sizes
Contact mechanics for MEMS-based fine pitch vertical technology is studied on various contact metallurgies. Calculations for scrub depth correlate well for aluminum and copper pad contacts
in experimental results. It appears that the modeling can also predict contact resistance for these pad metallurgies. This allows predictive performance of contact pin & pad materials of choice.
Contact resistance is studied as a function of test parameters. Stable contact resistance is achieved for three types of pad/bump metallurgies.
Initial results were presented for solder bump probing. More scrub analysis and characterization on different solder metallurgies on
copper pillars are needed.

June 7 to 10, 2009June 7 to 10, 2009 IEEE SW Test WorkshopIEEE SW Test Workshop 3232
1. Handbook of Micro/Nano Tribology, 2nd ed., edited by B. Bhushan,19992. Electric Contacts, R. Holm, 4th ed. 3. Electrical contacts-2001, Proceedings of the 47th IEEE Holm
Conference on Electrical Contacts4. SWTW 2006, C. Degen et al, “Parametric Study of Contact Fritting for
Improved CRes Stability”.5. SWTW 2006, J. Martens, on “Fritting”
Acknowledgments Authors gratefully acknowledge the analytical support from Jeff
Hicklin & Habib Kilicaslan
References