
Meiling chensignals & systems1 Lecture #2 Introduction to Systems.
31
meiling chen signals & systems 1 Lecture #2 Introduction to Systems
-
Upload
rafe-cameron -
Category
Documents
-
view
225 -
download
0
Transcript of Meiling chensignals & systems1 Lecture #2 Introduction to Systems.

meiling chen signals & systems 1
Lecture #2
Introduction to Systems

meiling chen signals & systems 2
systemA system is an entity that manipulates one or more signals to accomplish a function, thereby yielding new signals.
meiling chen signals & systems 3
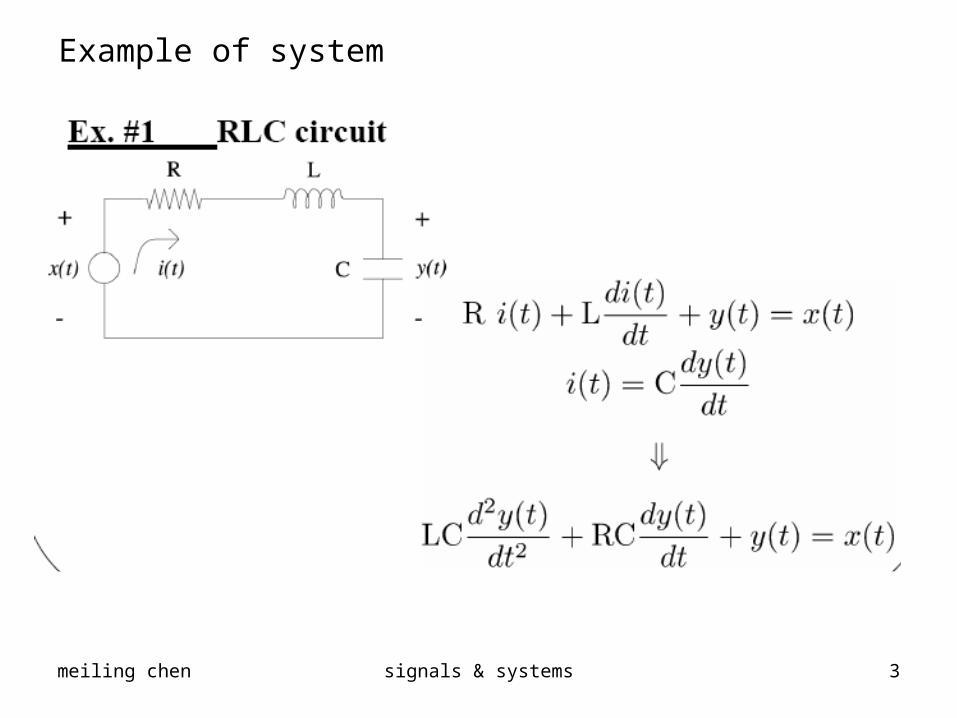
Example of system

meiling chen signals & systems 4
System interconnection

meiling chen signals & systems 5
System properties
• Causality
• Linearity
• Time invariance
• Invertibility

meiling chen signals & systems 6
CausalityA system is said to be causal if the present value of the output signal depends only on the present or past values of the input signal.

meiling chen signals & systems 7
Causal and noncausal system
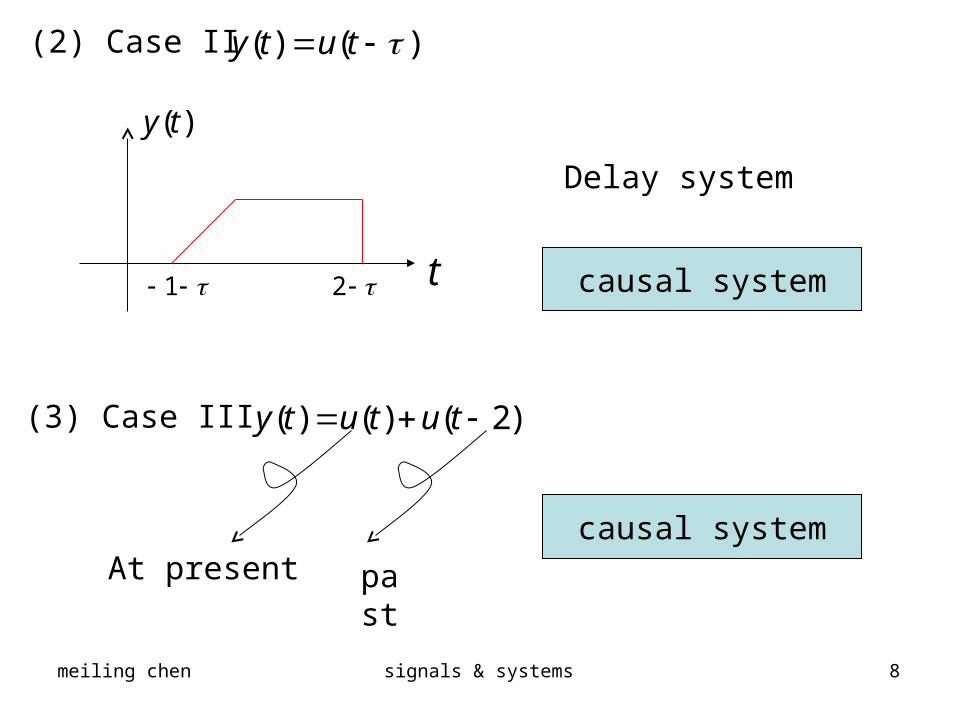
Example: distinguish between causal and noncausal systems in the following:
t
)(tu
1 2
(1) Case I )()( tuty
t
)(ty
12Noncausal system
0)(
0)(1
tybut
tutwhen
meiling chen signals & systems 8
(2) Case II
causal system
)()( tuty
t
)(ty
1 2
Delay system
(3) Case III )2()()( tututy
causal systemAt present past

meiling chen signals & systems 9
(4) Case IV )2()()( tututy
noncausal systemAt present future
(5) Case V
noncausal system
stepunitistuiftuty )()()( 2
t
)(ty
0)(
0)(0
tybut
tutwhen

meiling chen signals & systems 10

meiling chen signals & systems 11
Linearity
)(1 tx
A system is said to be linear in terms of the system input x(t) and the system output y(t) if it satisfies the following two properties of superposition and homogeneity.
Superposition :
Homogeneity :
)(1 ty )(2 tx )(2 ty
)()( 21 txtx )()( 21 tyty
)(1 tx )(1 ty )(1 tax )(1 tay

meiling chen signals & systems 12
Example 1.19
][][ nnxny
][][
][][
]}[][{][
][][][
][][][][
][][][][
][][
21
21
21
21
222
111
nbynay
nbnxnanx
nbxnaxnny
nbxnaxnxlet
nnxnynxnxlet
nnxnynxnxlet
nnxny
linear system
][nx ][ny

meiling chen signals & systems 13
Example 1.20
)1()()( txtxty
)()1()()1()()(
)()(
)1()()(
)()(
12
112
11
1
111
1
tyatxtxataxtaxty
taxtxlet
txtxty
txtxlet
)()( 1 tayty Non linear system
)(tx )(ty

meiling chen signals & systems 14
Properties of linear system :
(1)
(2)

meiling chen signals & systems 15
Time invarianceA system is said to be time invariant if a time delay or time advance of the input signal leads to an identical time shift in the output signal.
)(txTime invariant
system
)(ty
)( 0ttx
0t
)( 0tty
0t

meiling chen signals & systems 16
Example 1.18
)(
)()(
tR
txty
0),()(
)(
)()(
)(
)(
)(
)()(
)()(
)(
)()(
0201
0
011
0122
012
11
tfortytty
ttR
ttxtybut
tR
ttx
tR
txty
ttxtx
tR
txty
Time varying system
)(tx )(ty

meiling chen signals & systems 17
Invertibility
)(tx )(tx)(ty
A system is said to be Invertible if the input of the system can be recovered from the output.
H Hinv
)}({)( txHty )}({)( tyHtx inv
)}}({{)}({ txHHtyH invinv

meiling chen signals & systems 18
Example 1.15
)()( 0ttxty )(tx )(ty
IHH
ttxH
ttxH
inv
inv
)(
)(
0
0
Inverse system
Example 1.16)(tx )(ty
)()( 2 txty

meiling chen signals & systems 19
LINEAR TIME-INVARIANT (LTI) SYSTEMS:
A basic fact: If we know the response of an LTI system to some inputs, we actually know the response to many inputs
System identification

meiling chen signals & systems 20

meiling chen signals & systems 21
example
)(3)()()(2)( txtxtytyty
The system is governed by a linear ordinary differential equation (ODE)
Linear time invariant system
)(tx )(ty
)]()([])()([2])()([
)]()(2)([)]()(2)([
)](3)([)](3)([
)(3)(3)()()]()([3])()([
)(3)()()(2)(
)(3)()()(2)(
212121
222111
2211
21212121
22222
11111
tbytaytbytaytbytay
tytytybtytytya
txtxbtxtxa
txbtxatxbtxatbxtaxtbxtax
txtxtytyty
txtxtytyty
linearity

meiling chen signals & systems 22
LTI System representations
1. Order-N Ordinary Differential equation2. Transfer function (Laplace transform)3. State equation (Finite order-1 differential equations) )
1. Ordinary Difference equation2. Transfer function (Z transform)3. State equation (Finite order-1 difference equations)
Continuous-time LTI system
Discrete-time LTI system

meiling chen signals & systems 23
)()()()(
2
2
tutydt
tdyRC
dt
tydLC
constantsOrder-2 ordinary differential equation
Continuous-time LTI system
1
1
)(
)(
)()()()(
2
2
RCsLCssU
sY
sUsYsRCsYsYLCs
Transfer function
Linear system initial rest
1
12 RCsLCs
)(sU )(sY

meiling chen signals & systems 24
)(1
0
)(
)(10
)(
)(
2
1
12
1 tutx
tx
tx
tx
LR
LC
dt
tdytx
tytxlet
)()(
)()(
2
1
)()(1
)()(
)()(
122
21
tutxLC
txL
Rtx
txtx
)(tx )(tx)(tu
A

meiling chen signals & systems 25
System response: Output signals due to inputs and ICs.
1. The point of view of Mathematic:
2. The point of view of Engineer:
3. The point of view of control engineer:
Homogenous solution )(tyh Particular solution )(ty p+
+
+ Zero-state response )(ty zsZero-input response )(ty zi
Natural response )(tyn Forced response )(ty f
Transient response Steady state response
meiling chen signals & systems 26
1)0(
,1)0(,0,)(3)(
4)( 2
2
2
dt
dyytety
dt
tdy
dt
tyd t
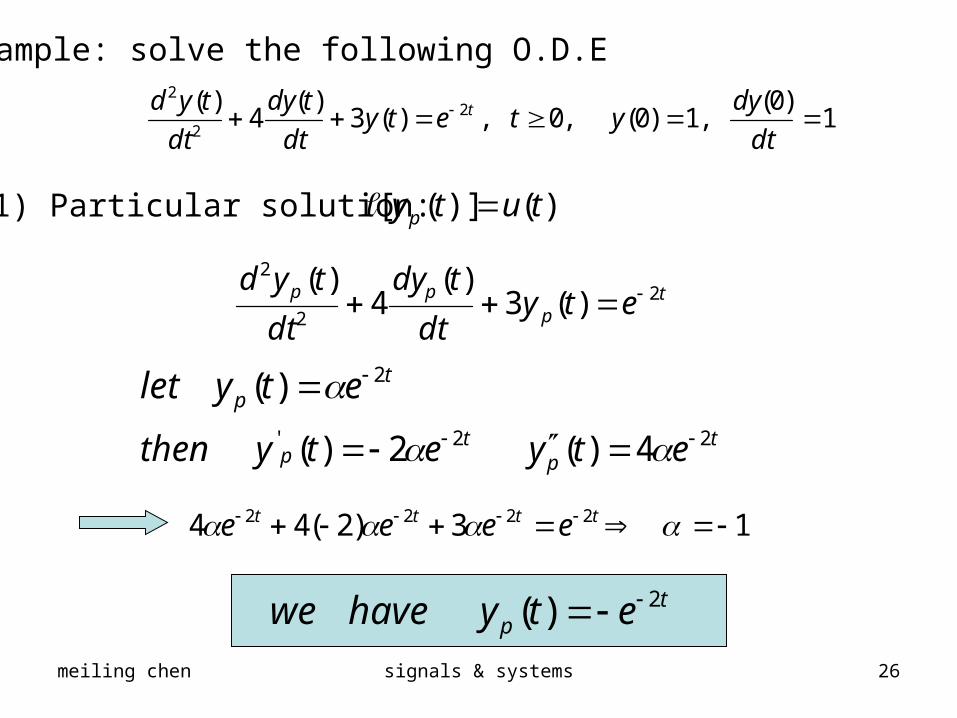
Example: solve the following O.D.E
(1) Particular solution: )()]([ tutyp
tp
pp etydt
tdy
dt
tyd 22
2
)(3)(
4)(
tp etylet 2)(
tp
tp etyetythen 22' 4)(2)(
13)2(44 2222 tttt eeee
tp etyhavewe 2)(
meiling chen signals & systems 27
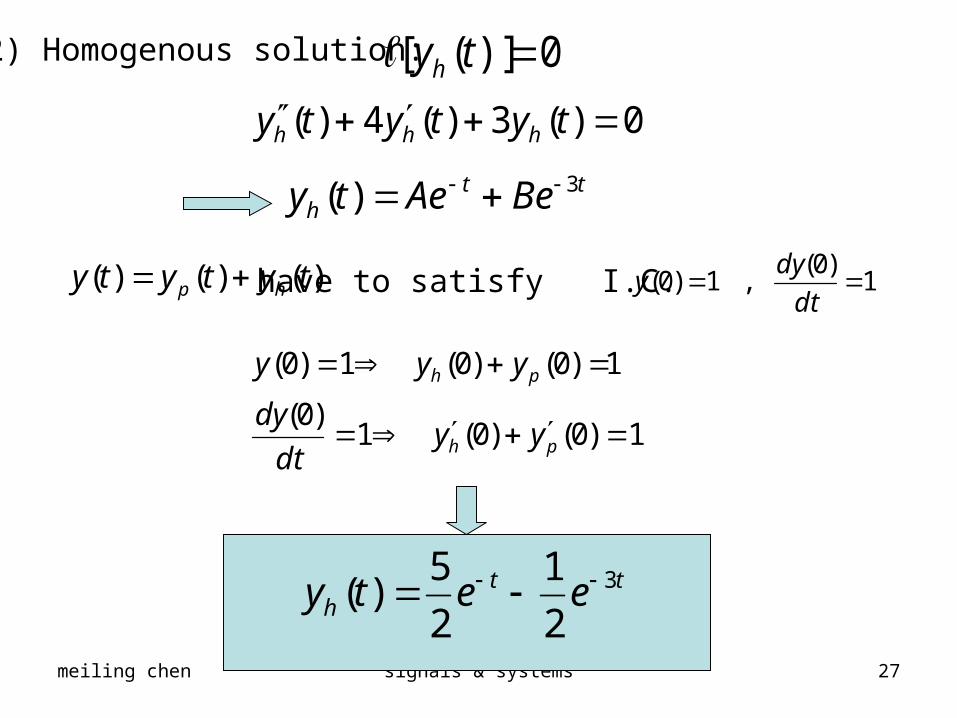
(2) Homogenous solution: 0)]([ tyh0)(3)(4)( tytyty hhh
tth BeAety 3)(
)()()( tytyty hp have to satisfy I.C. 1)0(
,1)0( dt
dyy
1)0()0(1)0(
1)0()0(1)0(
ph
ph
yydt
dy
yyy
tth eety 3
2
1
2
5)(

meiling chen signals & systems 28
(3) zero-input response: consider the original differential equation with no input.
1)0(,1)0(0,0)(3)(4)( zizizizizi yyttytyty
0,)( 321 teKeKty tt
zi
21
21
3)0(
)0(
KKy
KKy
zi
zi
1
2
2
1
K
K
0,2)( 3 teety ttzi
zero-input response

meiling chen signals & systems 29
(4) zero-state response: consider the original differential equation but set all I.C.=0.
0)0(,0)0(0,)(3)(4)( 2 zizi
tzszszs yytetytyty
tttzs eeCeCty 23
21)(
023)0(
01)0(
21
21
CCy
CCy
zs
zs
2
12
1
2
1
C
C
tttzs eeety 23
2
1
2
1)(
zero-state response

meiling chen signals & systems 30
(5) Laplace Method:
1)0(
,1)0(,0,)(3)(
4)( 2
2
2
dt
dyytety
dt
tdy
dt
tyd t
2
1)(3)0(4)(4)0()0()(2
ssYyssYysysYs
12
5
2
1
32
1
342
15
)(2
ssssss
ssY
ttt eeesYty
2
5
2
1)]([)( 231

meiling chen signals & systems 31
Complex response
Zero state response Zero input response
Forced response(Particular solution)
Natural response(Homogeneous solution)
Steady state response Transient response
ttt eeety
2
5
2
1)( 23
tttzs eeety 23
2
1
2
1)( 0,2)( 3 teety tt
zi
ttt eeety
2
5
2
1)( 23
tp ety 2)( tt
h eety 3
2
1
2
5)(








![Chapter_01[Crude Oil Treating Systems1]](https://static.fdocuments.net/doc/165x107/5436c3e2219acd57088b4615/chapter01crude-oil-treating-systems1.jpg)

![Operating systems1[1]](https://static.fdocuments.net/doc/165x107/54b482124a7959df018b4581/operating-systems11.jpg)





