Mechanism and Robot Kinematics, Part I: Algebraic Foundations · PDF fileMechanism and Robot...
50
Mechanism and Robot Kinematics, Part I: Algebraic Foundations Charles Wampler General Motors R&D Center In collaboration with Andrew Sommese University of Notre Dame
Transcript of Mechanism and Robot Kinematics, Part I: Algebraic Foundations · PDF fileMechanism and Robot...
Mechanism and Robot Kinematics, Part I:
Algebraic Foundations
Charles WamplerGeneral Motors R&D Center
In collaboration with
Andrew SommeseUniversity of Notre Dame
2
Overview
n Why kinematics is (mostly) algebraic geometryn Rigid bodies with algebraic surfaces in contact
n A good approximation to the most common devices
n Mechanism & robot typesn Families and sub-familiesn Classification via type graphs
n Types of kinematic problemsn Analysis: how does this mechanism move?
n Motion paths, workspace limits, singularities
n Synthesis: what mechanism will move this way?n Exceptional (“overconstrained”) mechanisms

3
Kinematics: Then & Now
Model of Watt Engine, 1784(http://kmoddl.library.cornell.edu/tutorials/05/)
Stewart-Gough robot(Fanuc F200)
4
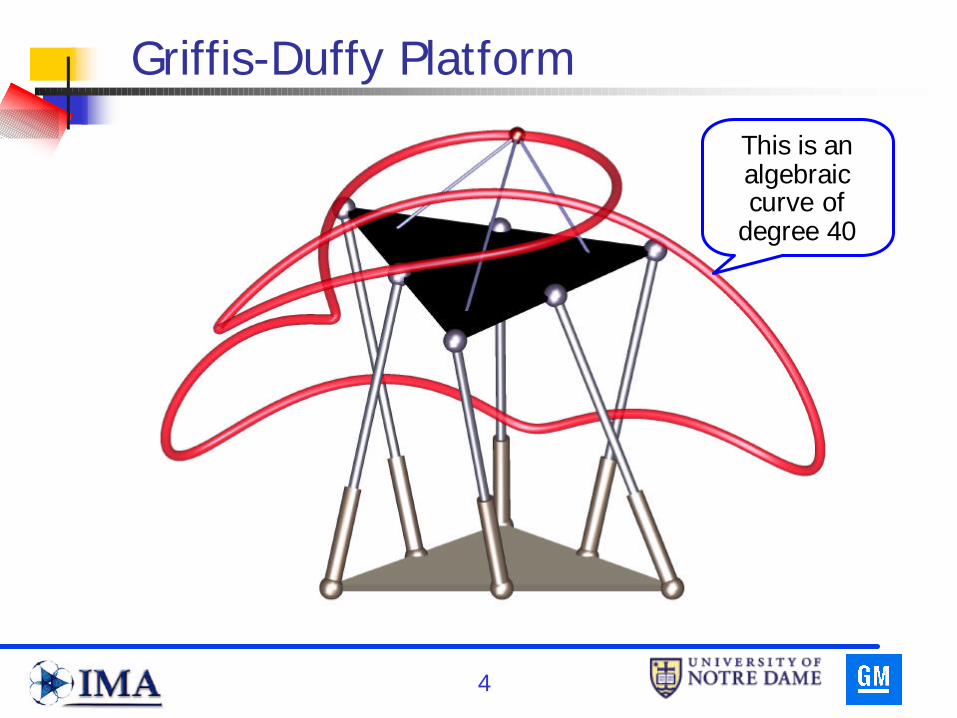
Griffis-Duffy Platform
This is an algebraic curve of
degree 40
5
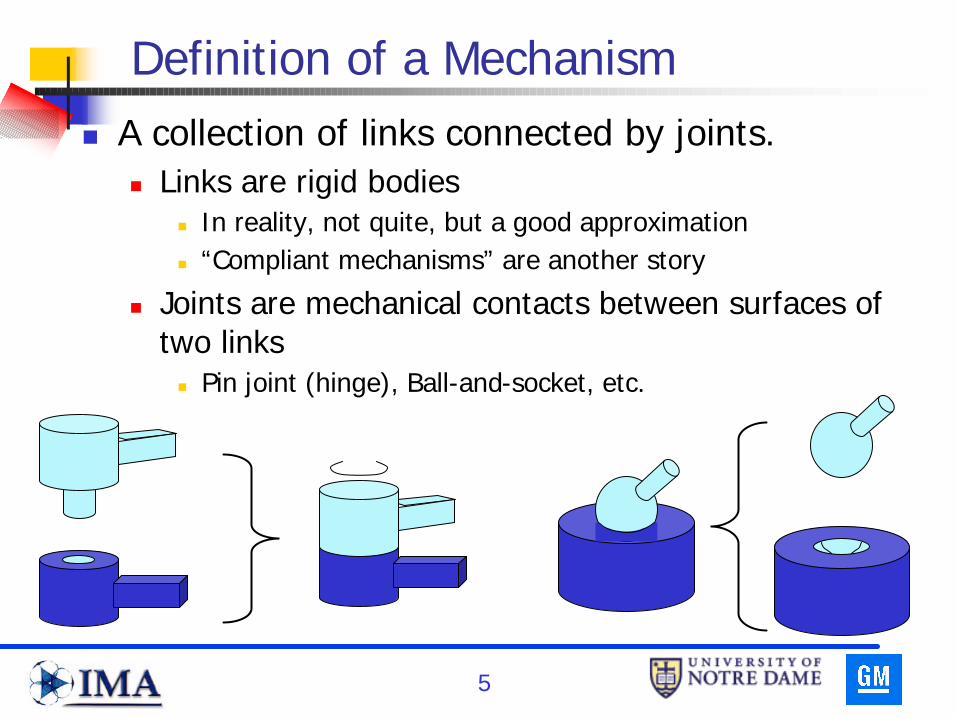
Definition of a Mechanismn A collection of links connected by joints.
n Links are rigid bodiesn In reality, not quite, but a good approximationn “Compliant mechanisms” are another story
n Joints are mechanical contacts between surfaces of two linksn Pin joint (hinge), Ball-and-socket, etc.
6
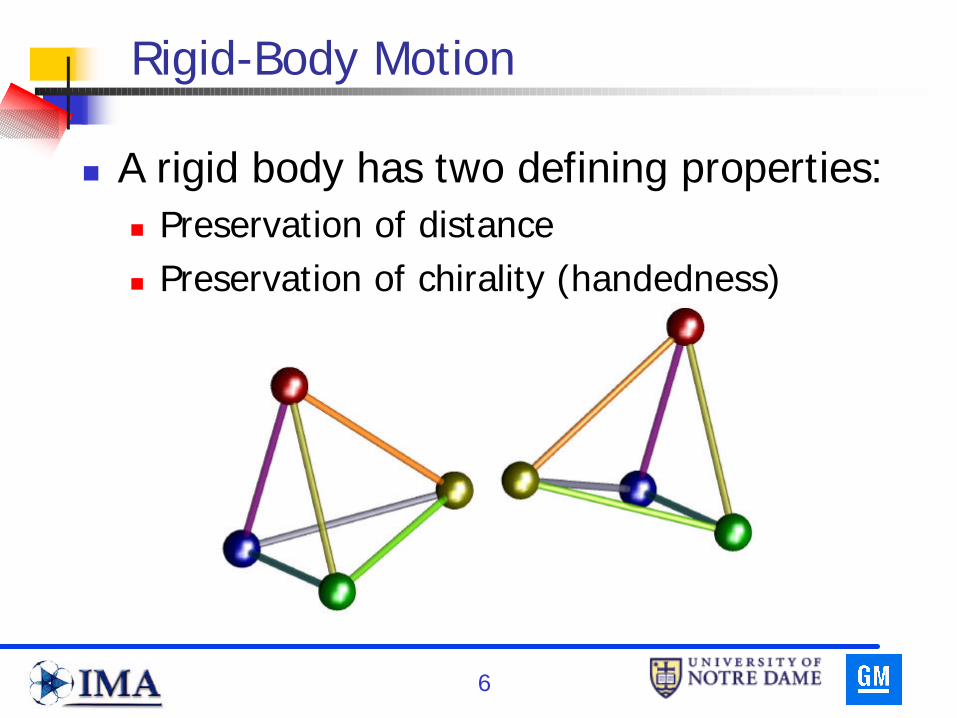
Rigid-Body Motion
n A rigid body has two defining properties:n Preservation of distancen Preservation of chirality (handedness)
7
Rigid-Body Motion (cont.)
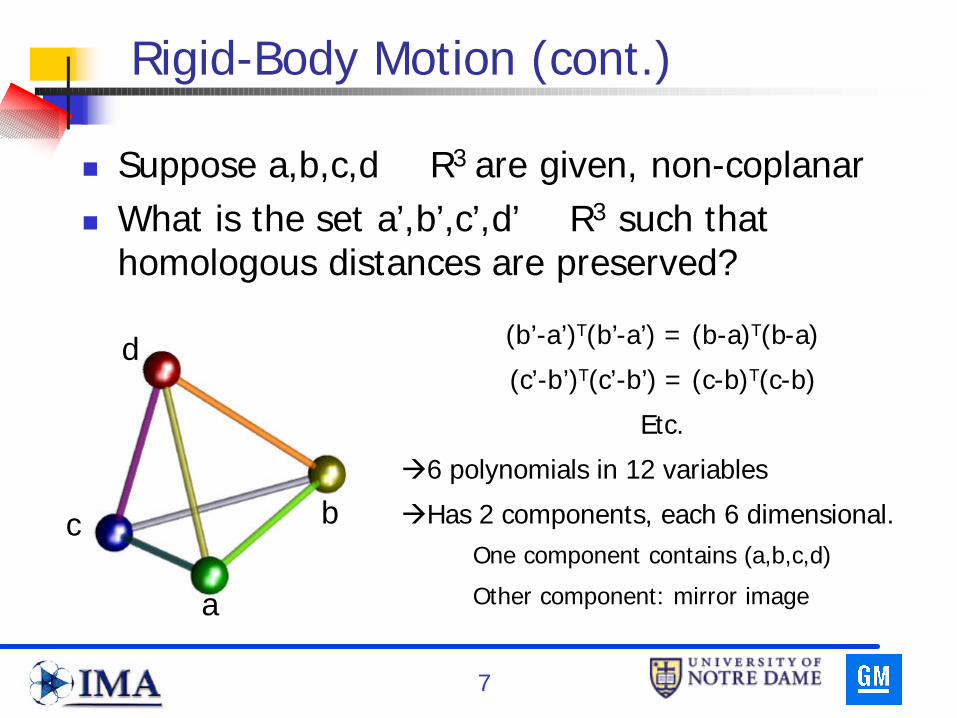
n Suppose a,b,c,d ∈ R3 are given, non-coplanarn What is the set a’,b’,c’,d’ ∈ R3 such that
homologous distances are preserved?
a
c
d
b
(b’-a’)T(b’-a’) = (b-a)T(b-a)
(c’-b’)T(c’-b’) = (c-b)T(c-b)
Etc.
à6 polynomials in 12 variables
àHas 2 components, each 6 dimensional.àOne component contains (a,b,c,d)
àOther component: mirror image
8
Rigid Body Motion (Spatial)
n SE(3) = R3×SO(3) (Lie Group R3×SO(3))n Preserves distance & chiralityn Let T∈SE(3) be given by (p,Q)
n p∈R3, Q∈SO(3)⊂ R3×3
n QTQ=I, det Q = 1.
n T: R3 → R3
n operates on point x∈R3 as T(x) = p + Q⋅x
Picks out the component that preserves chirality
n Factsn SE(3) is a 6-dimensional, algebraic subset of R3×4
n 3 translations, 3 rotations
n T: R3 → R3 is an algebraic map
O(3) preserves distance
9
Isomorphisms of SE(3)
n 4x4 Homogeneous matrix groupn Products and inverses are in the
same formn Transforms may be written as
n SO(3) isomorphic to P3
n Quaternionsn Unit quaternions double cover SO(3)
n Study’s soma (Study coordinates)n Study quadric in P7
10pQ
=
110)(
xpQxT
[ ]0
7
=+++∈
dtcsbraqtsrqdcba P
10
Subgroups of SE(3)
n Planar rigid-body motionn SE(2) = R2×SO(2) ⊂ SE(3)n dim SE(2) = 3
n Spherical rigid-body motionn SO(3) = 0×SO(3) ⊂ SE(3)n dim SO(3) = 3
n These are both of interest in kinematics too.
11
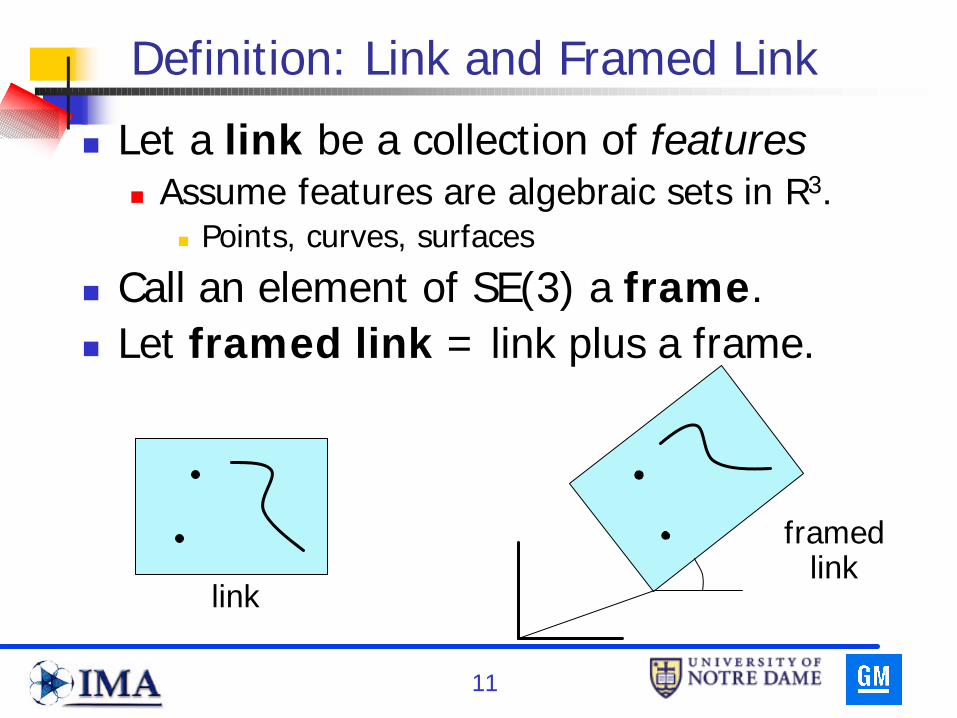
Definition: Link and Framed Link
n Let a link be a collection of featuresn Assume features are algebraic sets in R3.
n Points, curves, surfaces
n Call an element of SE(3) a frame.n Let framed link = link plus a frame.
link
framedlink
12
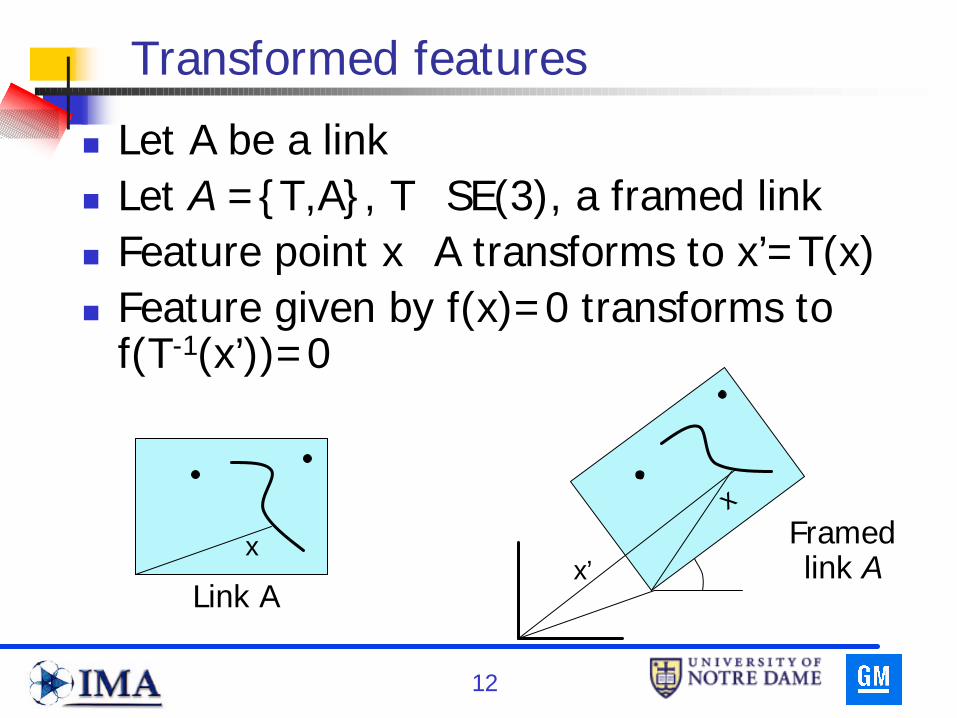
Transformed features
n Let A be a linkn Let A ={T,A}, T∈SE(3), a framed linkn Feature point x∈A transforms to x’=T(x)n Feature given by f(x)=0 transforms to
f(T-1(x’))=0
Link A
Framed link A
x
x
x’
13
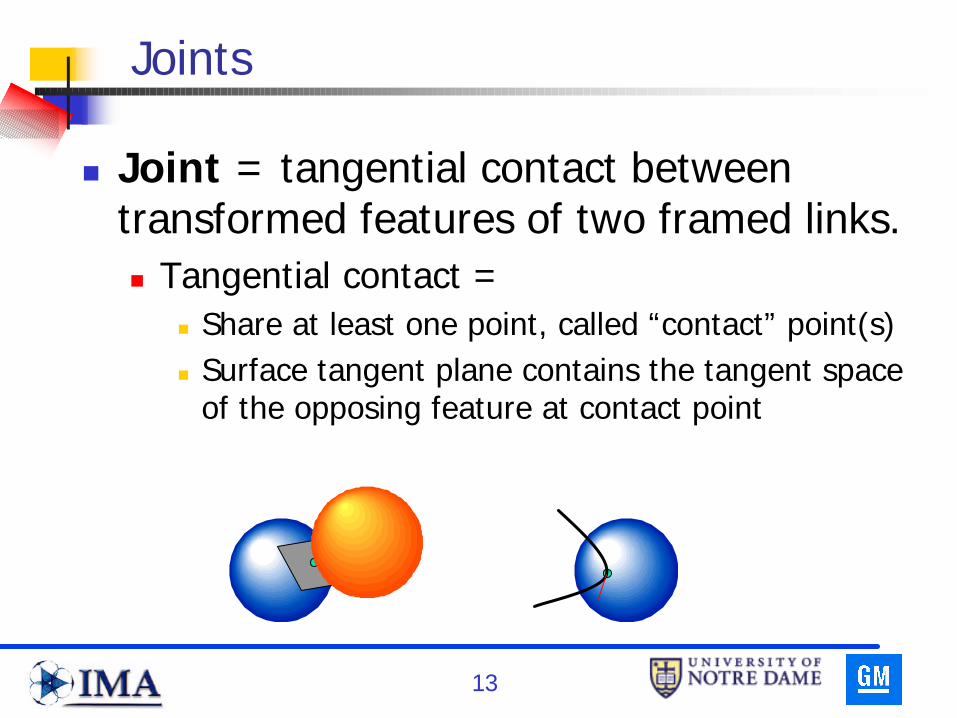
Joints
n Joint = tangential contact between transformed features of two framed links.n Tangential contact =
n Share at least one point, called “contact” point(s)n Surface tangent plane contains the tangent space
of the opposing feature at contact point
14
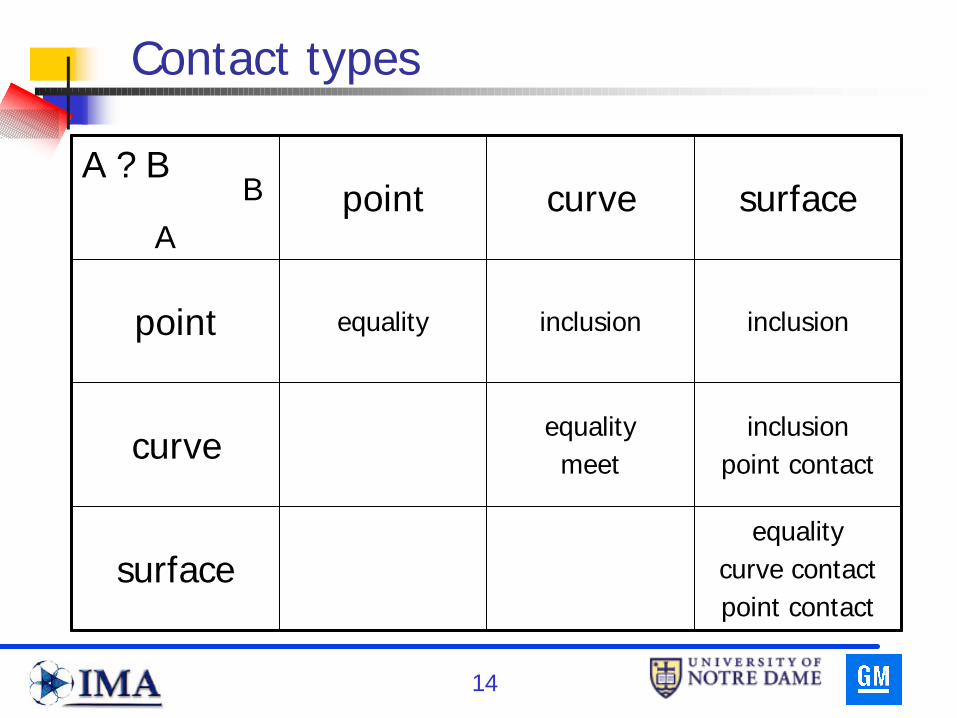
Contact types
equalitycurve contactpoint contact
surface
inclusionpoint contact
equalitymeetcurve
inclusioninclusionequalitypoint
surfacecurvepointA ? B
BA
15
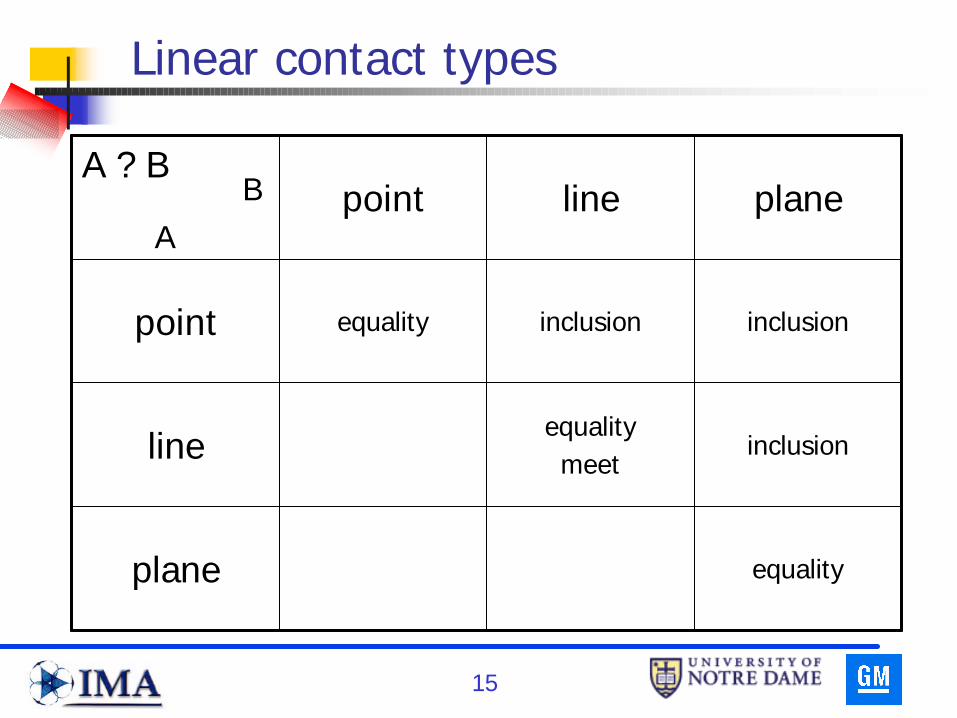
Linear contact types
equalityplane
inclusionequalitymeetline
inclusioninclusionequalitypoint
planelinepointA ? B
BA
16
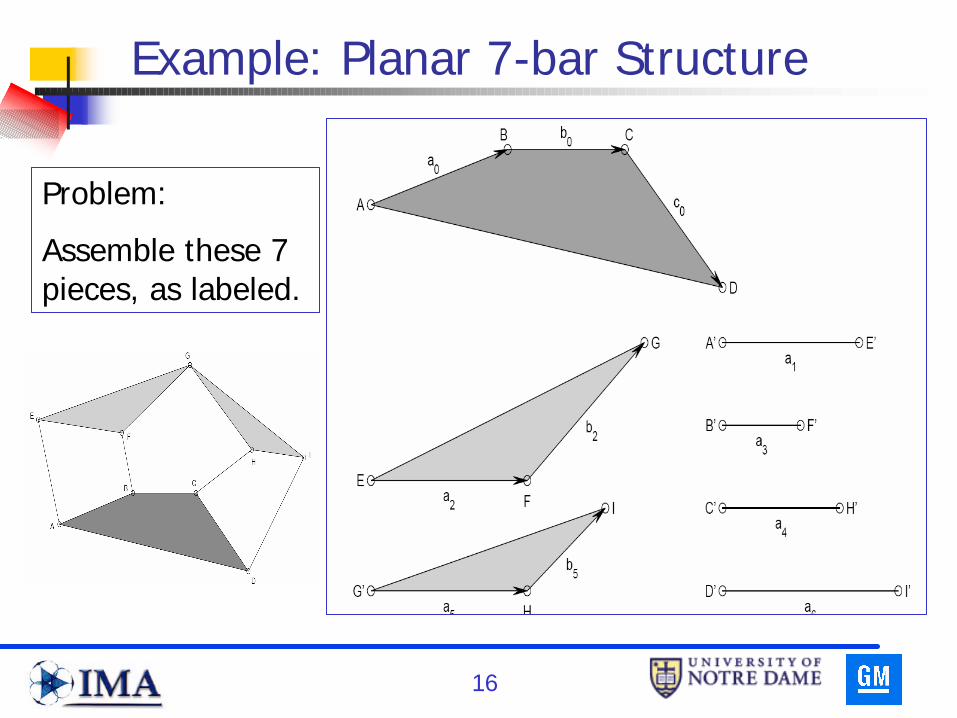
Example: Planar 7-bar Structure
Problem:
Assemble these 7 pieces, as labeled.
17
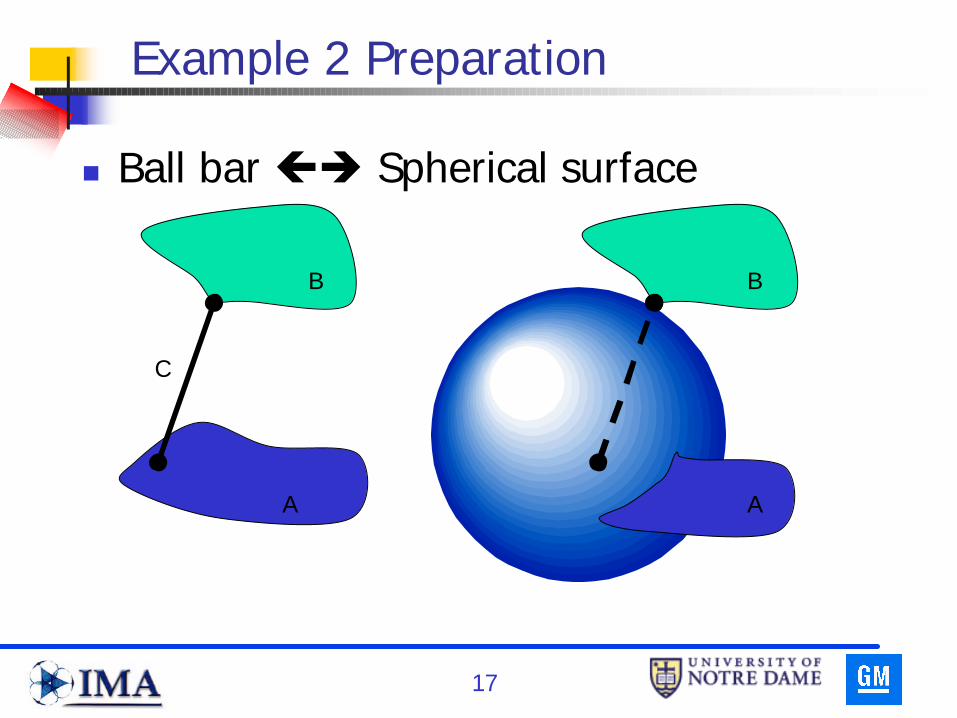
Example 2 Preparation
n Ball bar çè Spherical surface
A
C
B B
A
18
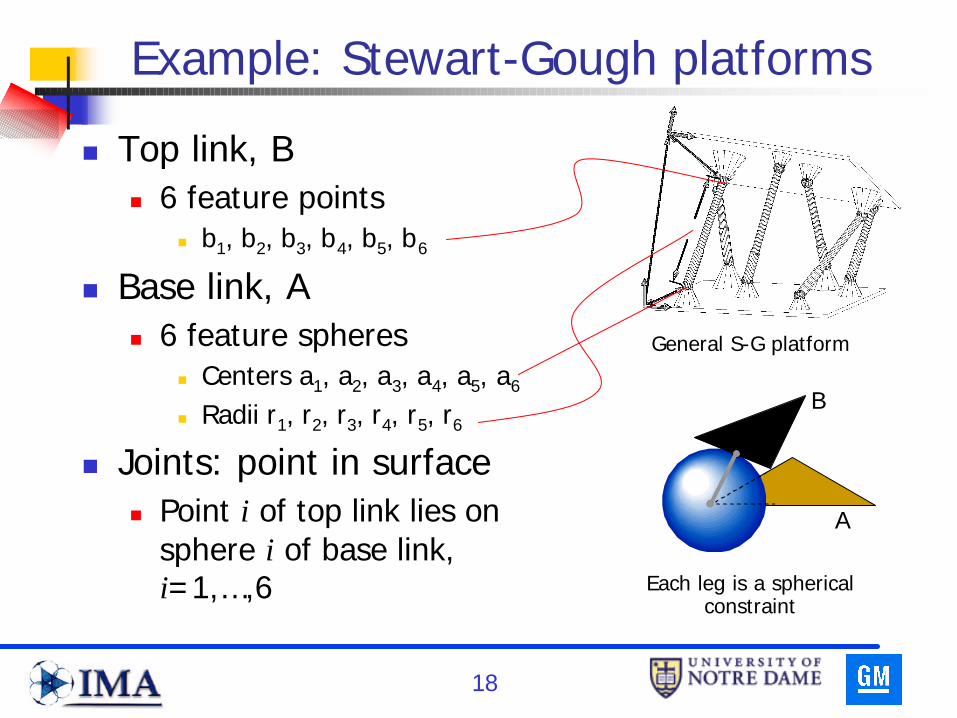
Example: Stewart-Gough platforms
n Top link, Bn 6 feature points
n b1, b2, b3, b4, b5, b6
n Base link, An 6 feature spheres
n Centers a1, a2, a3, a4, a5, a6
n Radii r1, r2, r3, r4, r5, r6
n Joints: point in surfacen Point i of top link lies on
sphere i of base link, i=1,…,6
General S-G platform
Each leg is a spherical constraint
A
B
19
Example (cont): Forming equations
n For i=1,…,6n Sphere equation:
fi(x)=(x-ai)T(x-ai)-ri2=0
n Point inclusions:fi(T(bi))=0 (*)
Where T is the transform for framed link B
n For given links, the T that satisfy (*) are the possible locations of B w.r.t. A
20
Joints: Lower-order pairs
n What surface=surface joints allow relative motion?n Answer given by Reuleaux, 1875n Rigorous proof by Selig, 1989, IJRR
n Lie groups
n Why engineers care:n Distributed stress = less wear
n And the answer is…
21
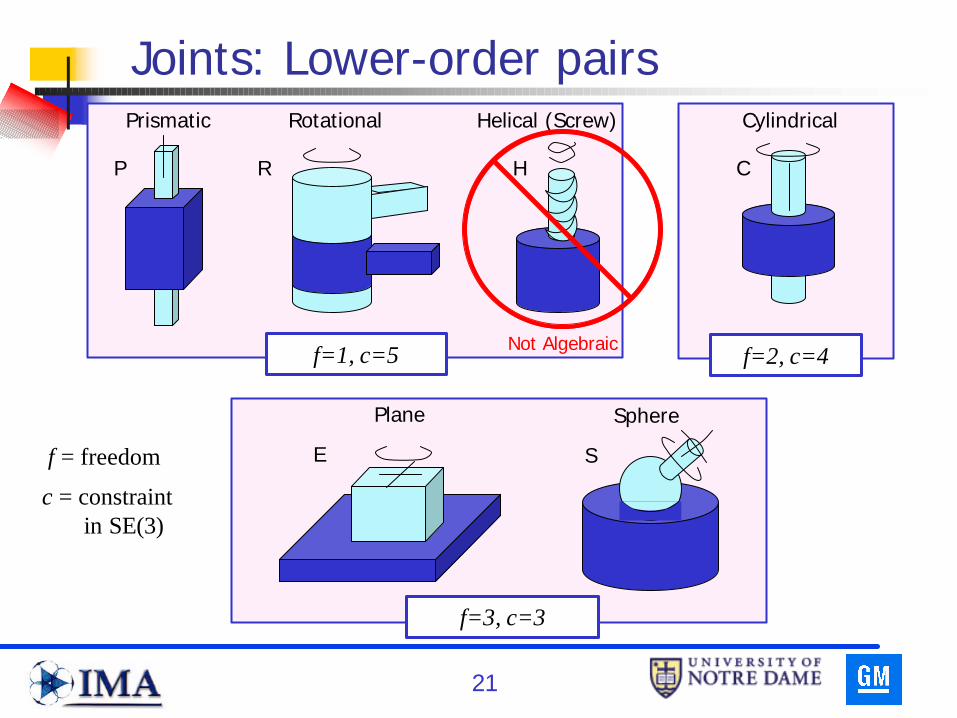
Joints: Lower-order pairs
f=1, c=5
P R H
Prismatic Rotational Helical (Screw)
f=2, c=4
C
Cylindrical
f=3, c=3
E S
Plane Sphere
f = freedom
c = constraint in SE(3)
Not Algebraic
22
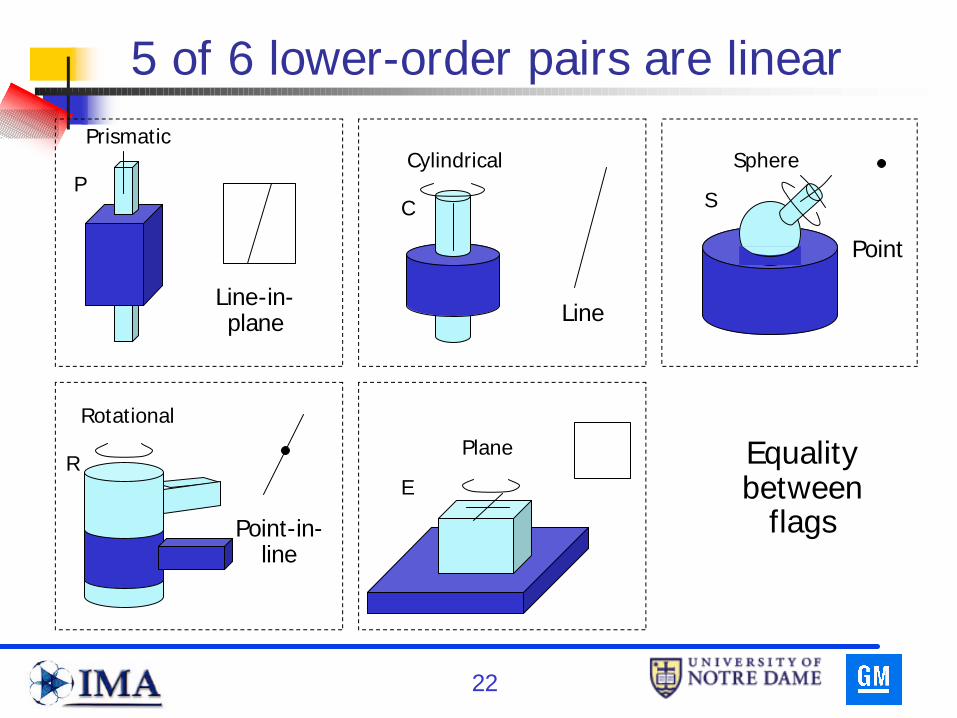
5 of 6 lower-order pairs are linear
P
Prismatic
Line-in-plane
R
Rotational
Point-in-line
C
Cylindrical
Line
E
Plane
S
Sphere
Point
Equality between
flags
23
Linear link types
n Let link type index = integer triplet(# feature points, # feature lines, # f. planes)
n For each link type index, (a,b,c), there is an associated link type universal spaceLabc = Aff(0,3)a × Aff(1,3)b × Aff(2,3)c
n A link type is an algebraic subset of a link type universal space, say
Y ⊂ Labcn Inclusions, parallelism, perpendicularity, etc.
24
Mechanism Definition Revisited
n Limit our attention to linear featuresn Mechanism family is given by
n List of N framed linksn Each link i has a type Yi ⊂ L(abc)i
n (a,b,c)i is link type indexn Each linear element is a feature
n Framed link i has a transform Ti∈SE(3), n List of joints, each consisting of
n A pair of features of two distinct linksn A contact operation (equality, inclusion, meet)
n Family is M ⊂ SE(3)N × Y , n where Y is a given algebraic set Y ⊂Y1 × … × YNn Equations for M derive from the contact operations
applied to transformed feature pairs.
25
Some Mechanism Families
n Native linear familiesn Those for which Y= L(abc)1
× … × L(abc)Nn Lower-order pair families
n All joints are one of P,R,C,E,Sn Planar mechanisms
n Frames are in SE(2)n Joints are either:
n P with lines parallel to reference planen R with axes orthogonal to reference plane
n Spherical mechanismsn Frames are in SO(3)n Joints are all R with axes through the origin
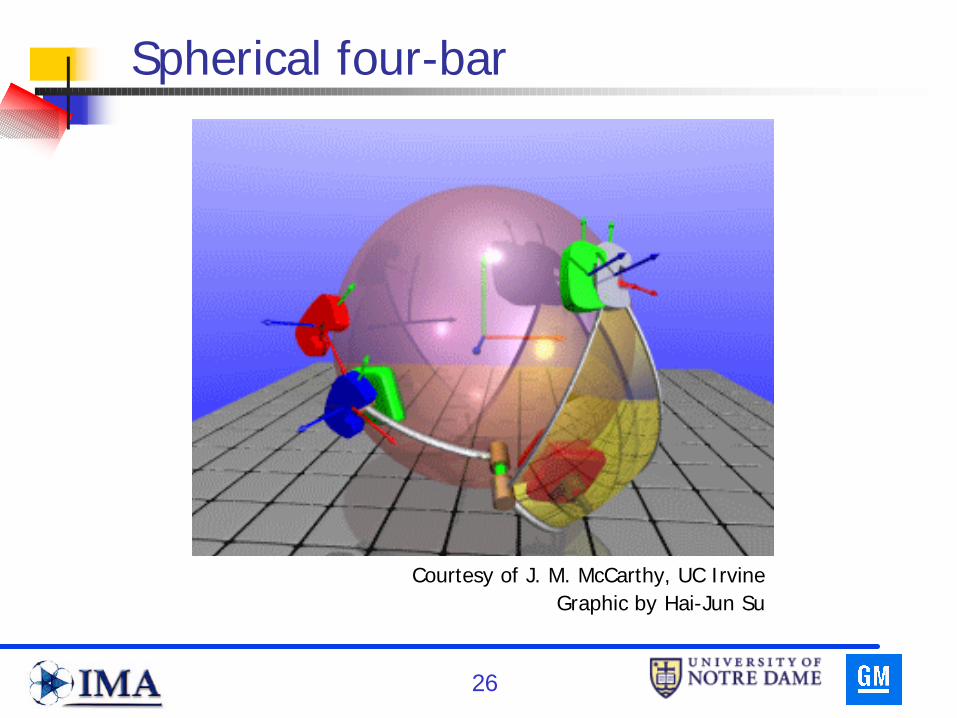
26
Spherical four-bar
Courtesy of J. M. McCarthy, UC IrvineGraphic by Hai-Jun Su
27
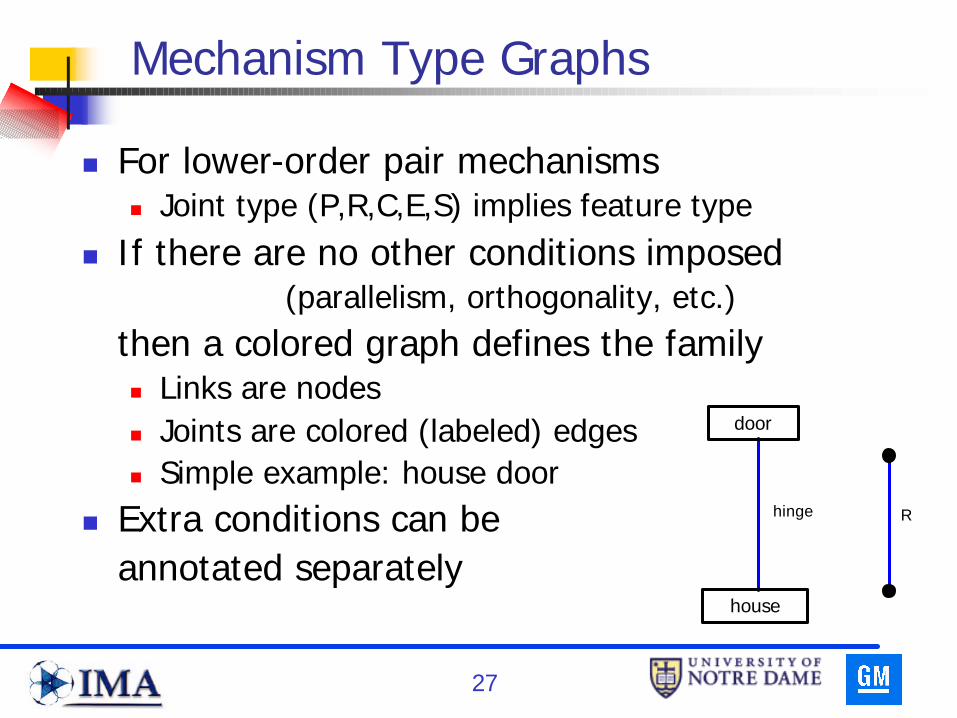
Mechanism Type Graphs
n For lower-order pair mechanismsn Joint type (P,R,C,E,S) implies feature type
n If there are no other conditions imposed(parallelism, orthogonality, etc.)
then a colored graph defines the familyn Links are nodesn Joints are colored (labeled) edgesn Simple example: house door
n Extra conditions can beannotated separately
Rhinge
door
house
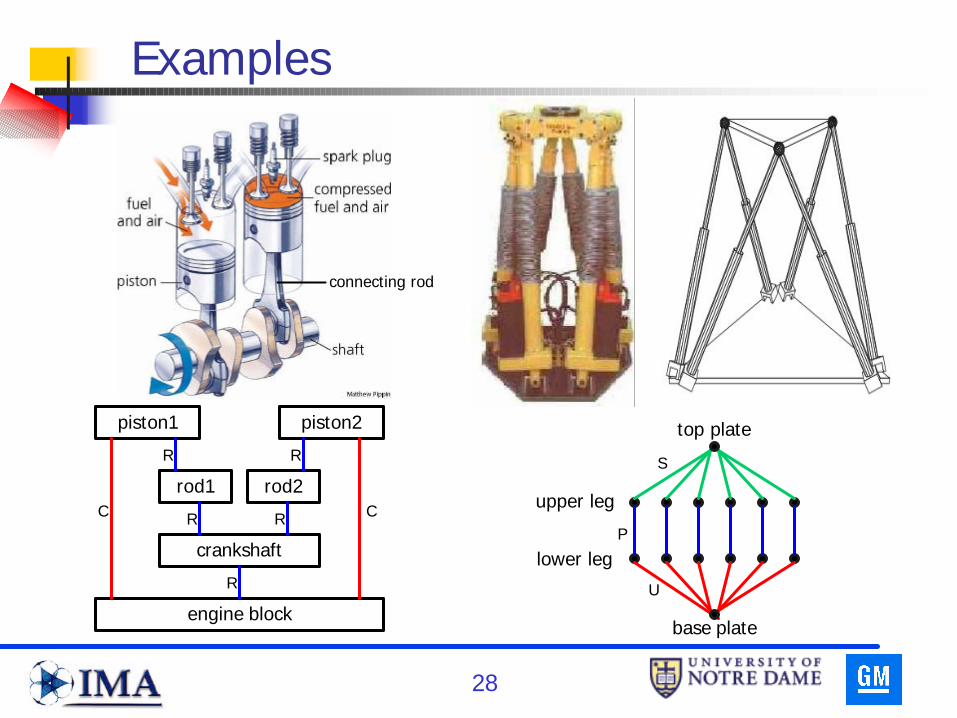
28
Examples
connecting rod
engine block
crankshaft
rod1 rod2
piston1 piston2
C CR
R
R
R
R
base plate
top plate
P
U
S
lower leg
upper leg
29
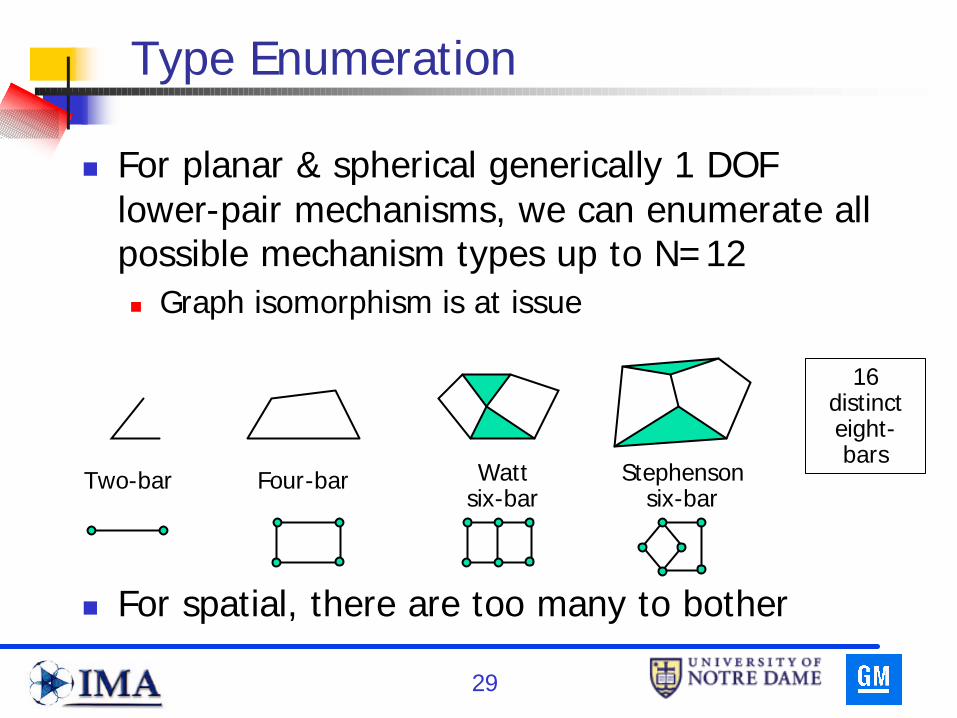
Type Enumeration
n For planar & spherical generically 1 DOF lower-pair mechanisms, we can enumerate all possible mechanism types up to N=12n Graph isomorphism is at issue
n For spatial, there are too many to bother
Two-bar Four-bar Watt six-bar
Stephenson six-bar
16 distinct eight-bars
30
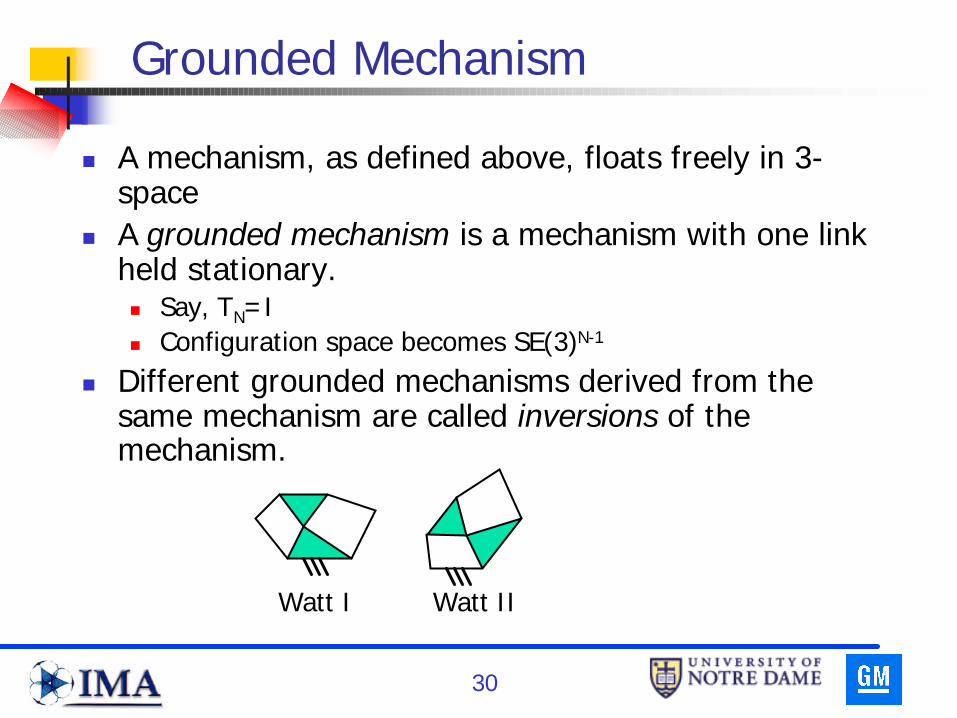
Grounded Mechanism
n A mechanism, as defined above, floats freely in 3-space
n A grounded mechanism is a mechanism with one link held stationary.n Say, TN=In Configuration space becomes SE(3)N-1
n Different grounded mechanisms derived from the same mechanism are called inversions of the mechanism.
Watt I Watt II
31
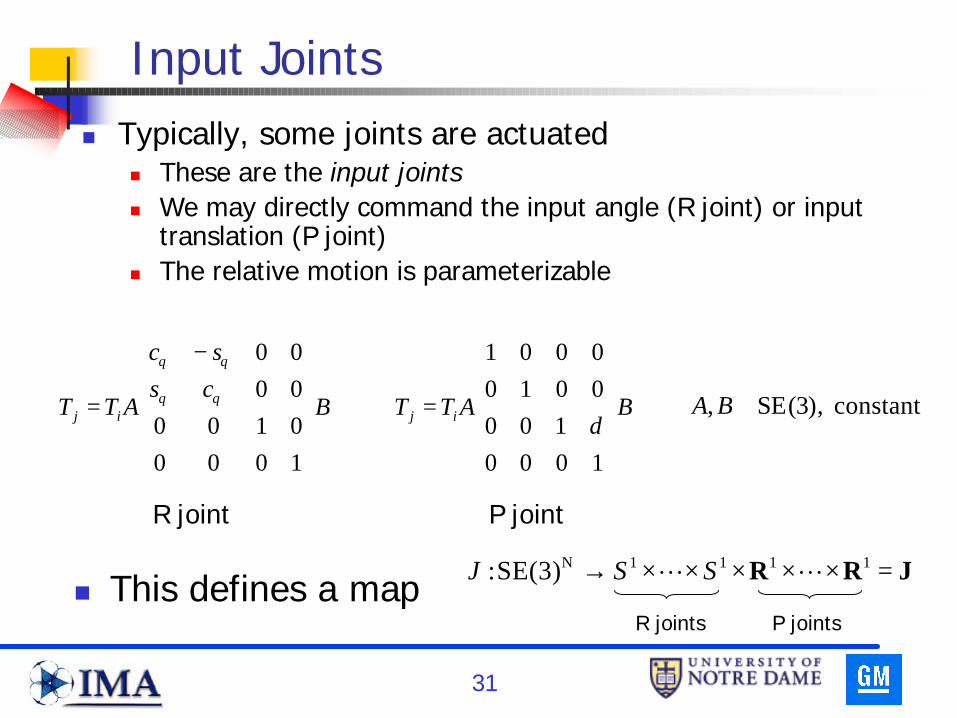
Input Jointsn Typically, some joints are actuated
n These are the input jointsn We may directly command the input angle (R joint) or input
translation (P joint)n The relative motion is parameterizable
Bcssc
ATT ij
−
=
100001000000
θθ
θθ
BATT ij
=
1000100
00100001
δconstant ),3(SE, ∈BA
R joint P joint
n This defines a map JRR =×××××→ 1111NSE(3) : LL SSJ
R joints P joints
32
Output Link(s) or Output Joint(s)
n There is usually an output link or output joint(s) that directly interacts with the environment to achieve the purpose of the mechanismn Examples: robot hand, automobile wheeln This gives an output function:
K: SE(3)N à Kn Output link, K: SE(3)N à SE(3)n Rotational output joint, K: SE(3)N àS1
33
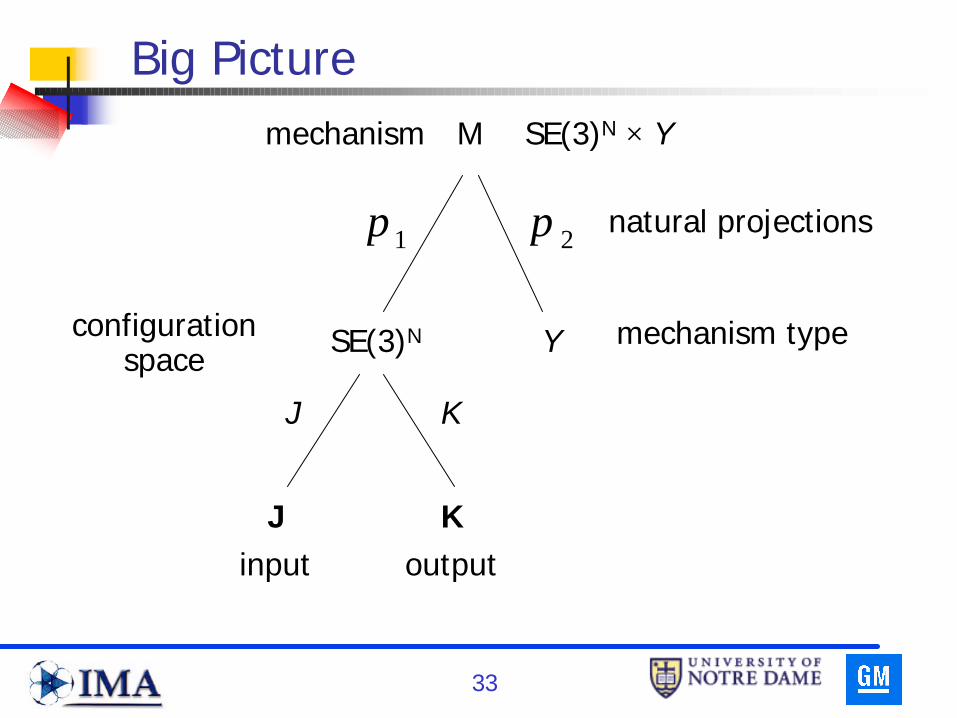
Big Picture
1π 2π
SE(3)N Y
natural projections
M ⊂ SE(3)N × Y
J
J
K
Kinput output
mechanism typeconfiguration space
mechanism
34
Overview (revisited)
n Why kinematics is (mostly) algebraic geometryn Rigid bodies with algebraic surfaces in contact
n A good approximation to the most common devices
n Mechanism & robot typesn Families and sub-familiesn Classification via type graphs
n Types of kinematic problemsn Analysis: how does this mechanism move?
n Motion paths, workspace limits, singularities
n Synthesis: what mechanism will move this way?n Exceptional (“overconstrained”) mechanisms
35
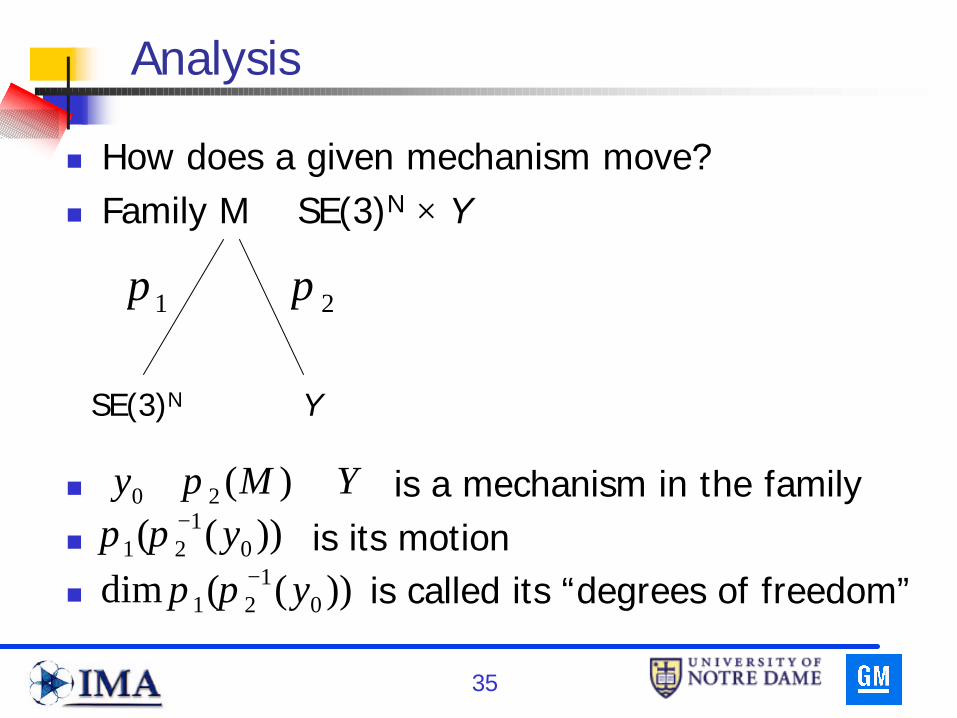
Analysis
n How does a given mechanism move?n Family M ⊂ SE(3)N × Y
1π 2π
SE(3)N Y
n is a mechanism in the familyn is its motionn is called its “degrees of freedom”
YMy ⊂∈ )(20 π))(( 0
121 y−ππ
))(( dim 01
21 y−ππ
36
Analysis
n The motion may have several components.n Find the DOF of each componentn Real dimension = complex dimension
n The DOF’s may be different for different pointsn For each irred. component of find the generic DOF’s
))(( 01
21 y−ππ
)(20 My π∈YM ⊂)(2π
37
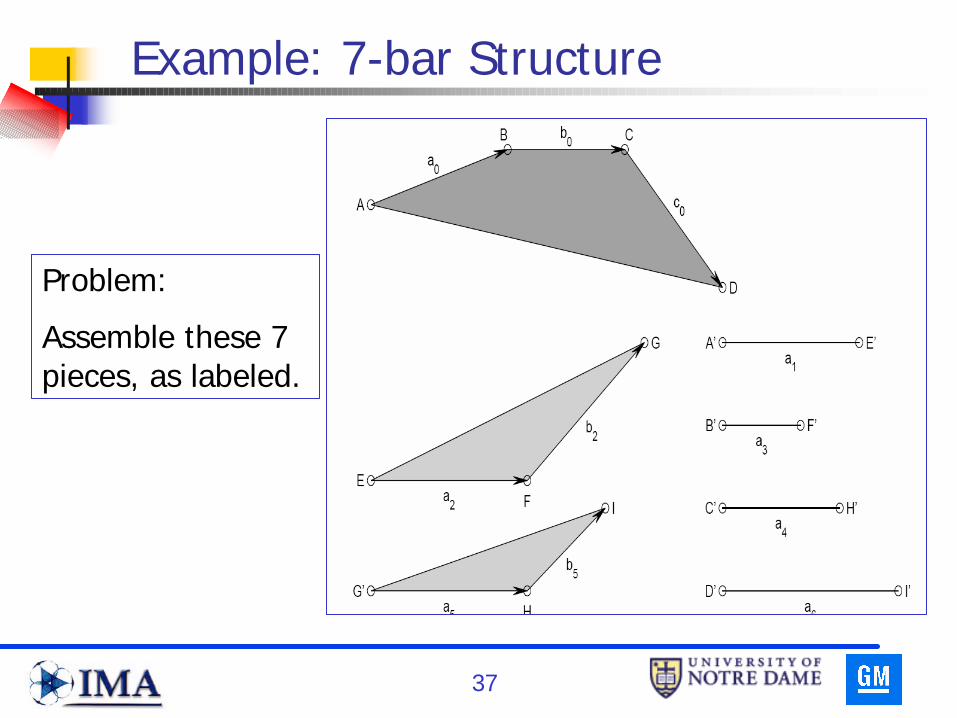
Example: 7-bar Structure
Problem:
Assemble these 7 pieces, as labeled.
38
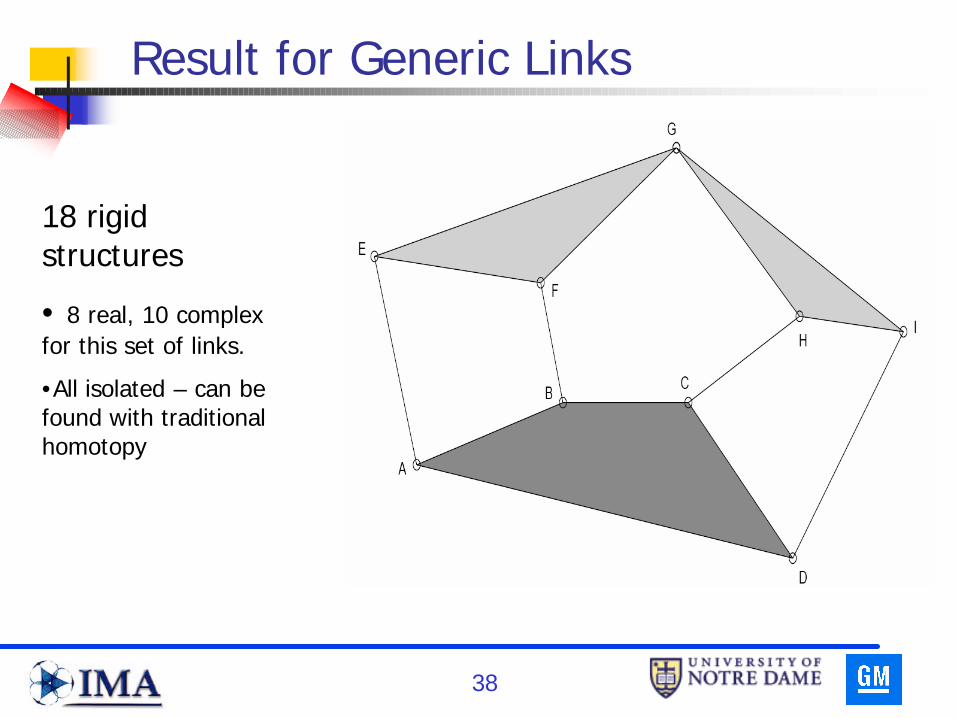
Result for Generic Links
18 rigid structures
• 8 real, 10 complex for this set of links.
•All isolated – can be found with traditional homotopy
39
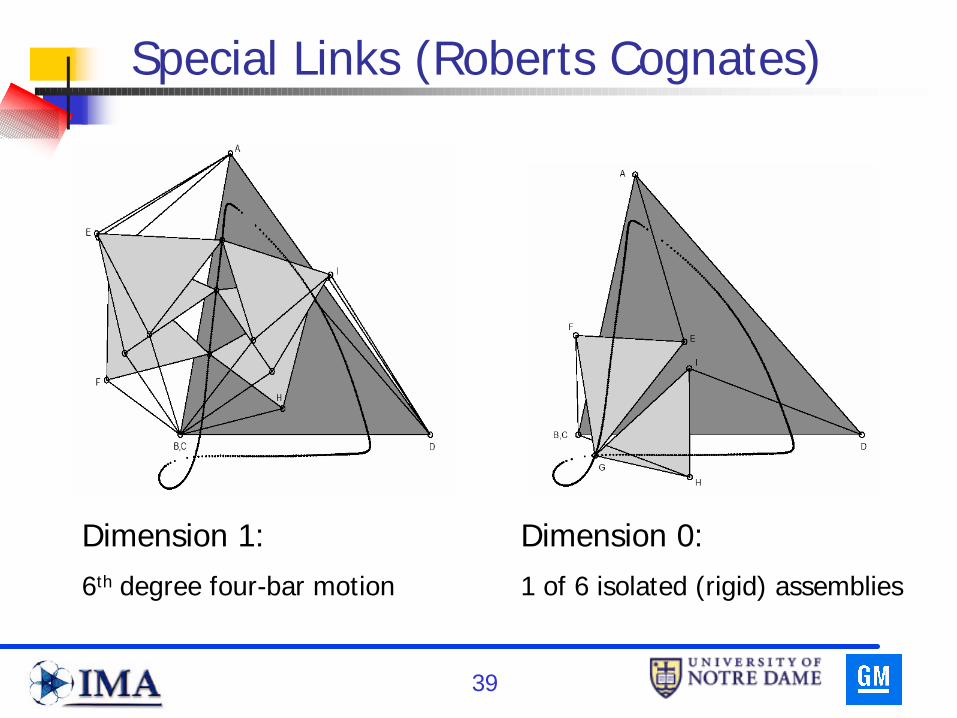
Special Links (Roberts Cognates)
Dimension 1:
6th degree four-bar motion
Dimension 0:
1 of 6 isolated (rigid) assemblies
40
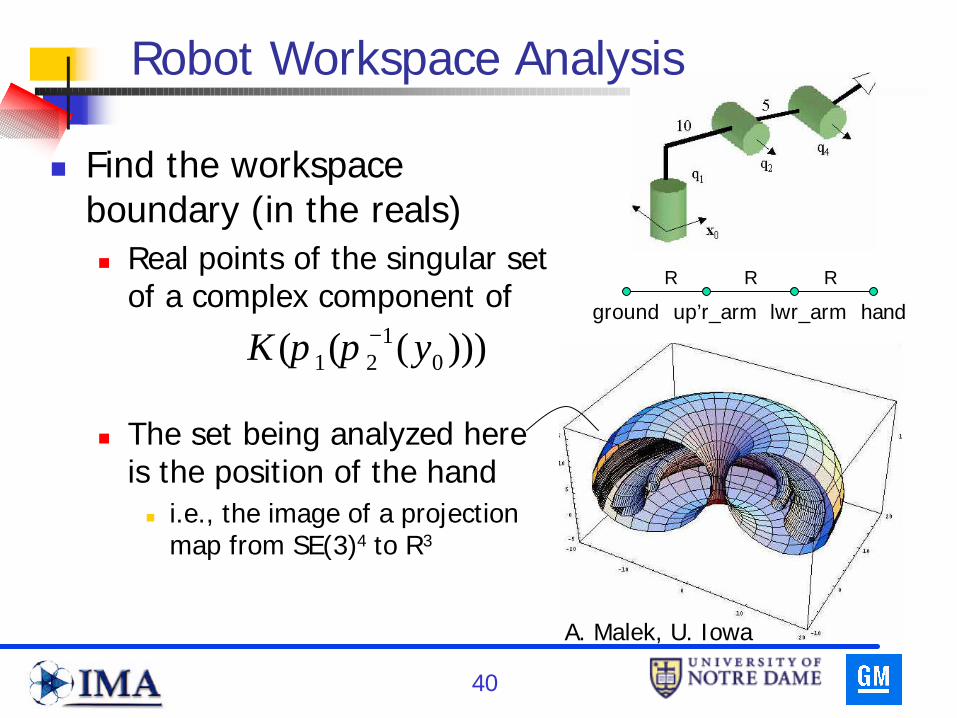
Robot Workspace Analysis
n Find the workspace boundary (in the reals)n Real points of the singular set
of a complex component of
n The set being analyzed here is the position of the handn i.e., the image of a projection
map from SE(3)4 to R3
A. Malek, U. Iowa
ground up’r_arm lwr_arm hand
R R R
)))((( 01
21 yK −ππ
41
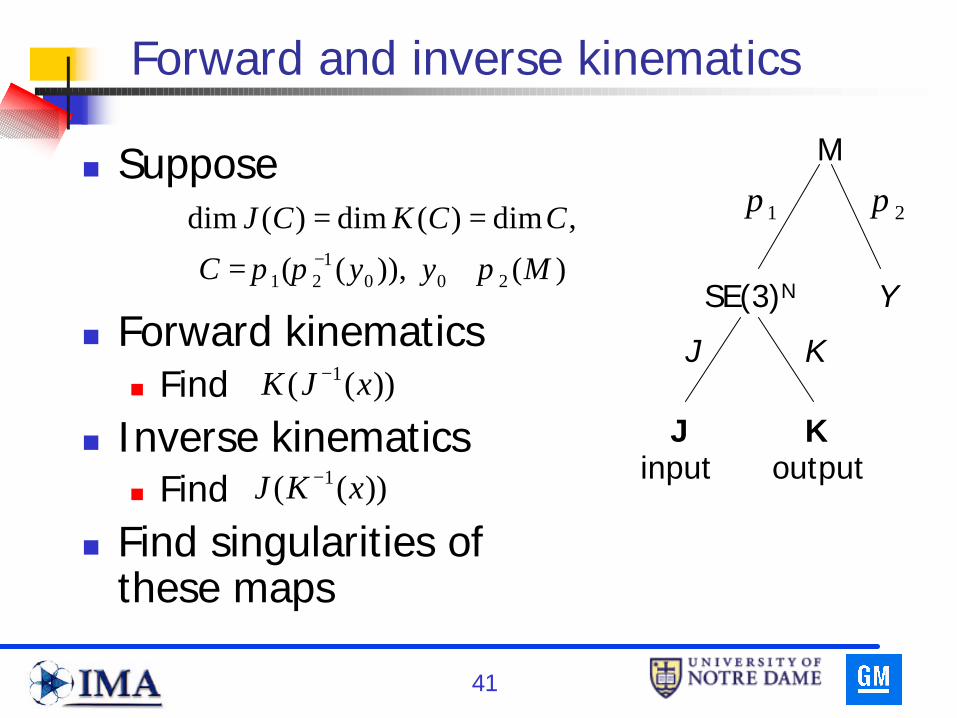
Forward and inverse kinematics
n Suppose
n Forward kinematicsn Find
n Inverse kinematicsn Find
n Find singularities of these maps
1π 2π
SE(3)N Y
J
J
K
Kinput output
M
)( )),((
,dim)(dim)(dim
2001
21 MyyC
CCKCJ
πππ ∈=
==−
))(( 1 xJK −
))(( 1 xKJ −
42
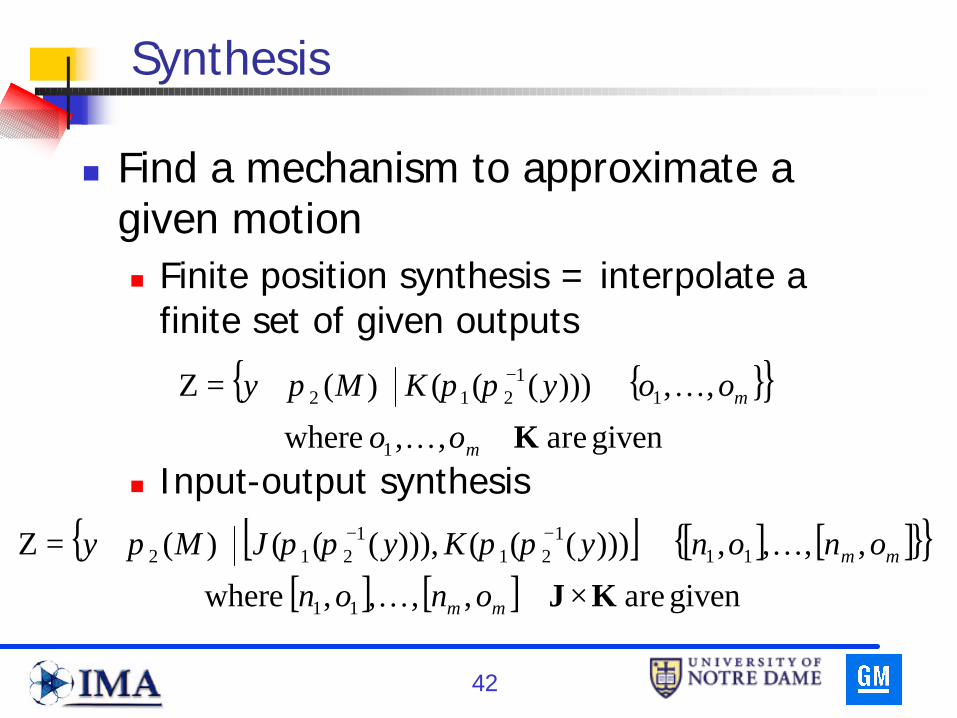
Synthesis
n Find a mechanism to approximate a given motionn Finite position synthesis = interpolate a
finite set of given outputs
n Input-output synthesis
{ }{ }given are ,, where
,,)))((( )(Z
1
11
212
K∈
⊃∈= −
m
m
oo
ooyKMy
K
Kπππ
[ ] [ ] [ ]{ }{ }[ ] [ ] given are ,,,, where
,,,,)))((())),((( )(Z
11
111
211
212
KJ ×∈
⊃∈= −−
mm
mm
onon
ononyKyJMy
K
Kπππππ
43
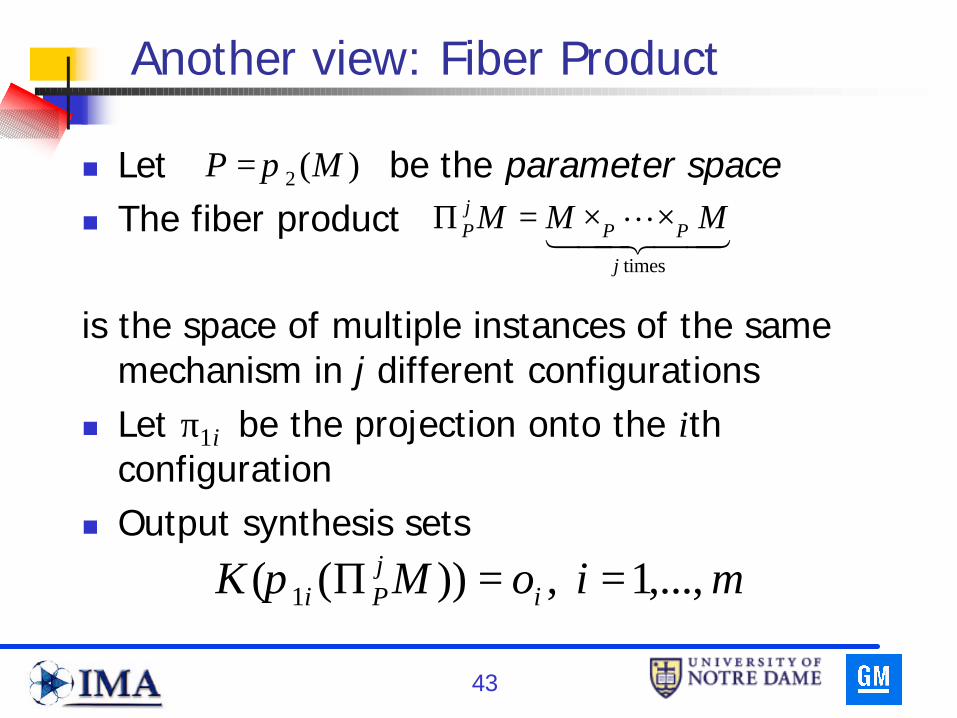
Another view: Fiber Product
n Let be the parameter spacen The fiber product
is the space of multiple instances of the same mechanism in j different configurations
n Let π1i be the projection onto the ithconfiguration
n Output synthesis sets
)(2 MP π=
44 344 21 L timesj
PPjP MMM ××=Π
mioMK ijPi ,...,1 ,))(( 1 ==Ππ
44
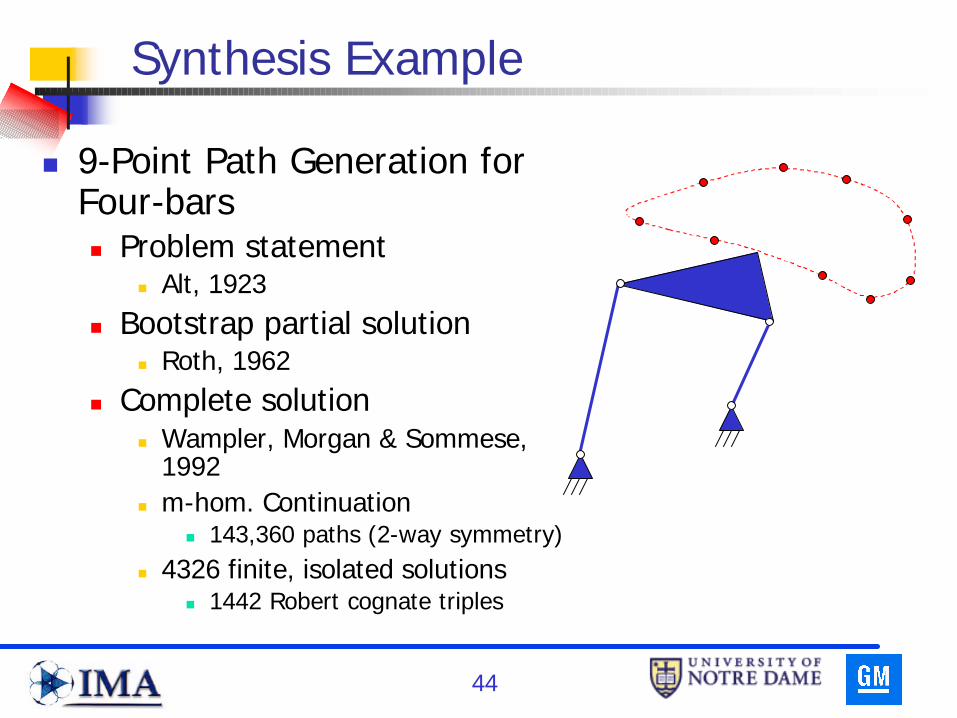
Synthesis Example
n 9-Point Path Generation for Four-barsn Problem statement
n Alt, 1923
n Bootstrap partial solutionn Roth, 1962
n Complete solutionn Wampler, Morgan & Sommese,
1992n m-hom. Continuation
n 143,360 paths (2-way symmetry)n 4326 finite, isolated solutions
n 1442 Robert cognate triples
45
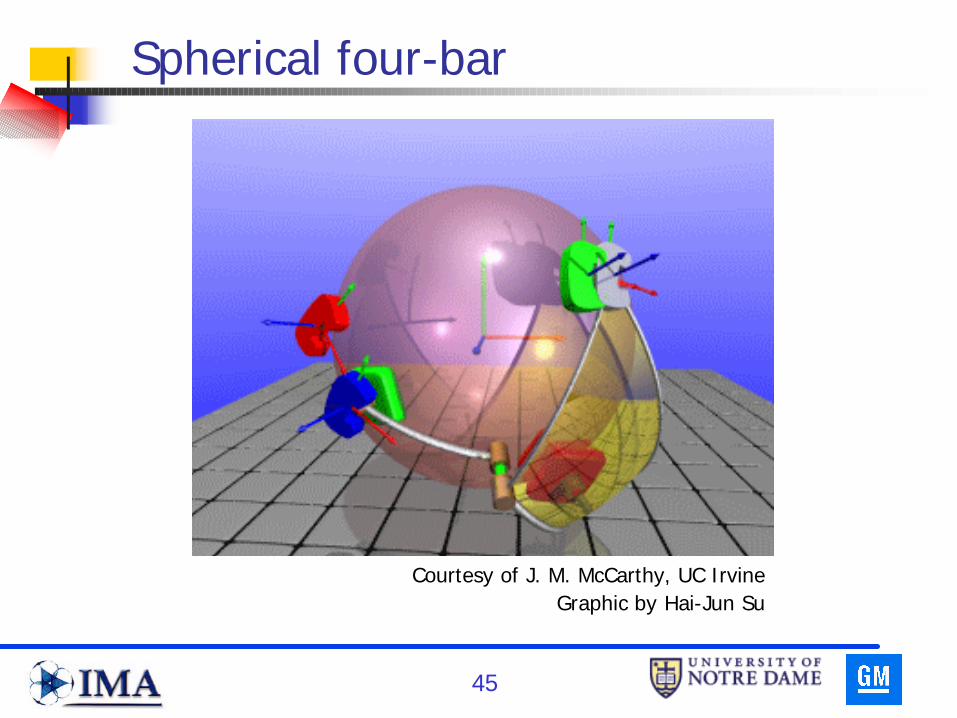
Spherical four-bar
Courtesy of J. M. McCarthy, UC IrvineGraphic by Hai-Jun Su
46
Exceptional Mechanisms
n A.K.A. “overconstrained mechanisms”n For each component of M, there is a
generic fiber dimension, M’s DOF
n M may have algebraic subsets where the fiber dimension is larger than d*n These are exceptional mechanismsn Finding such mechanisms is challenging
Mxxd x ∈= − genericfor )))((dim 21
2* ππ
47
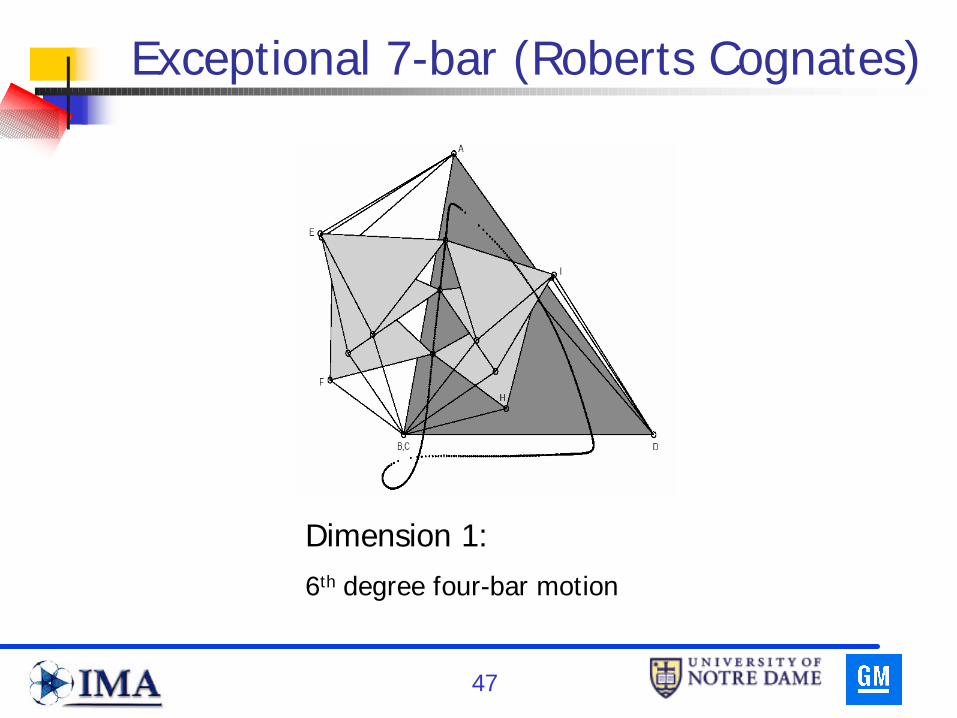
Exceptional 7-bar (Roberts Cognates)
Dimension 1:
6th degree four-bar motion
48
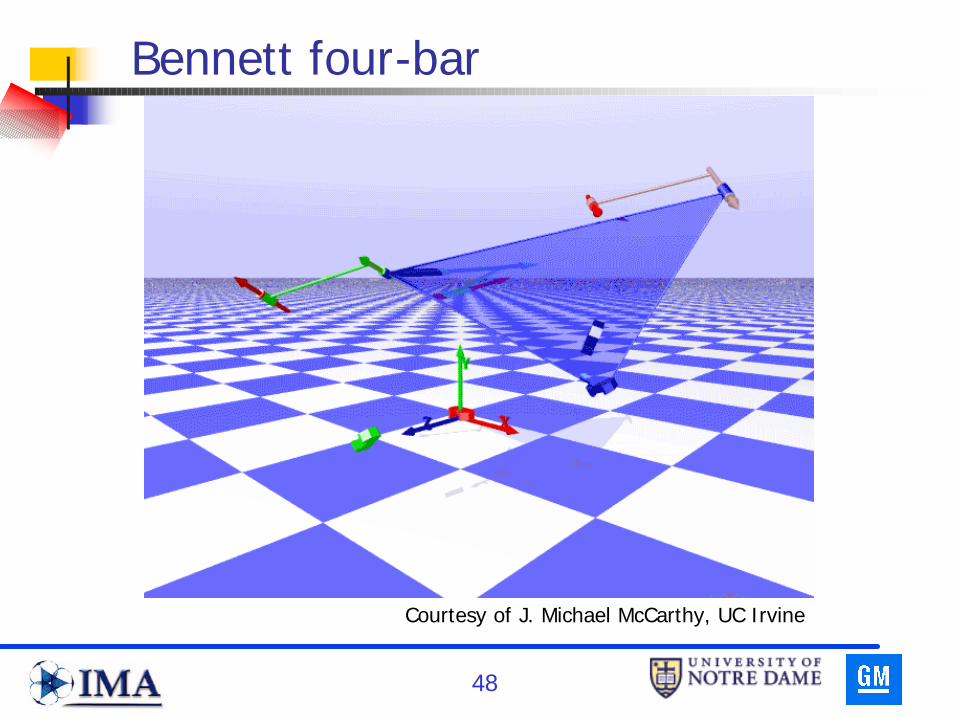
Bennett four-bar
Courtesy of J. Michael McCarthy, UC Irvine
49
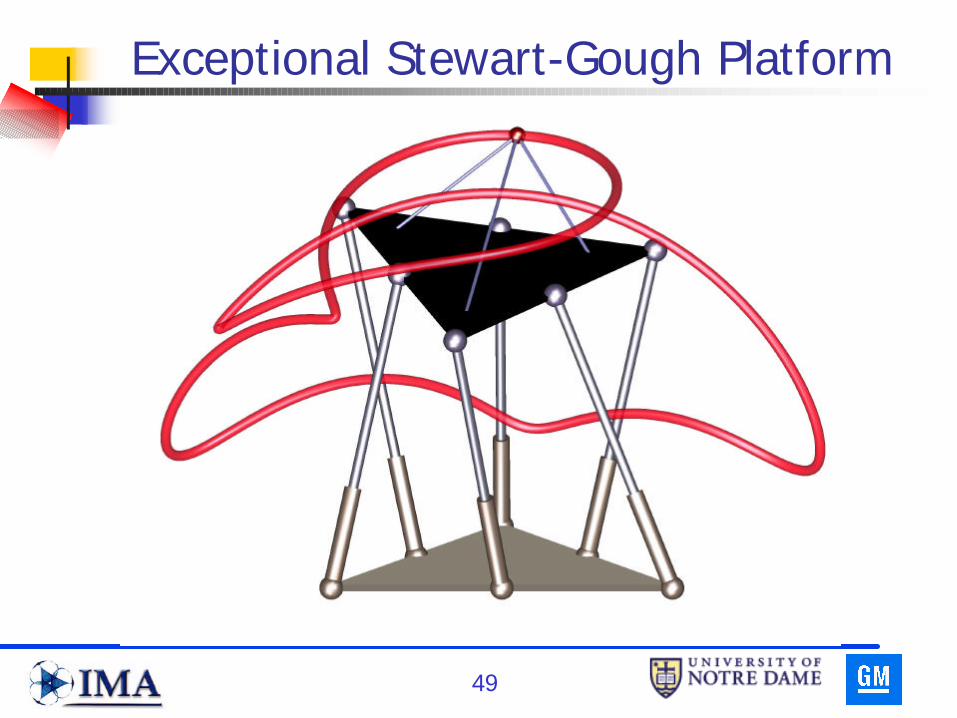
Exceptional Stewart-Gough Platform
50
Summary
n Rigid-body mechanisms with algebraic joint features are algebraicn Linear features include all lower-order pairs
n P,R,C,E,S
n Linear mechanism spaces are a rich source of interesting algebraic sets
n Kinematic problems fall into three main classesn Analysisn Synthesisn Discovery of Exceptional Mechanisms
n Many challenges await!