
Meccanica del punto materiale Dinamicapersonalpages.to.infn.it/~gbosia/ Scienze Naturali/Lezioni AA...
18
Lezione 4 Lezione 4 Meccanica del punto materiale Dinamica
Transcript of Meccanica del punto materiale Dinamicapersonalpages.to.infn.it/~gbosia/ Scienze Naturali/Lezioni AA...

Lezione 4Lezione 4
Meccanica del punto materialeDinamica
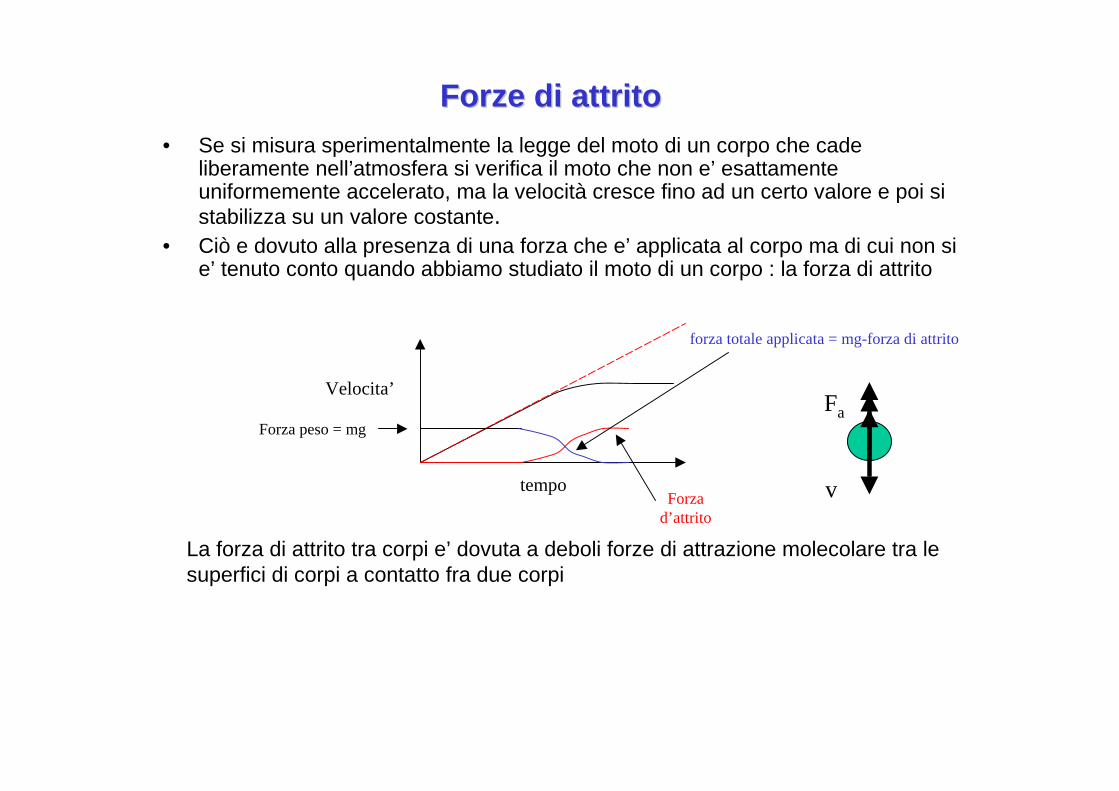
Forze di attritoForze di attrito• Se si misura sperimentalmente la legge del moto di un corpo che cade
liberamente nell’atmosfera si verifica il moto che non e’ esattamente uniformemente accelerato, ma la velocità cresce fino ad un certo valore e poi si stabilizza su un valore costante.
• Ciò e dovuto alla presenza di una forza che e’ applicata al corpo ma di cui non si e’ tenuto conto quando abbiamo studiato il moto di un corpo : la forza di attrito
tempo
Velocita’
Forza d’attrito
Forza peso = mg
La forza di attrito tra corpi e’ dovuta a deboli forze di attrazione molecolare tra le superfici di corpi a contatto fra due corpi
forza totale applicata = mg-forza di attrito
v
Fa

Forze di attritoForze di attrito
Velocita’Forza di attrito con l’aria
Forza di attrito con la rotaia
La forza di attrito si oppone sempre alla direzione del moto
Forze di attritoForze di attrito
• Le forze di attrito sono molto importanti in natura perché di fatto permettono il moto.
• Tuttavia sono la sorgente principale di dissipazione di energia meccanica per sistemi in movimento. Per questo si cerca in generale di minimizzarle in corpi in movimento
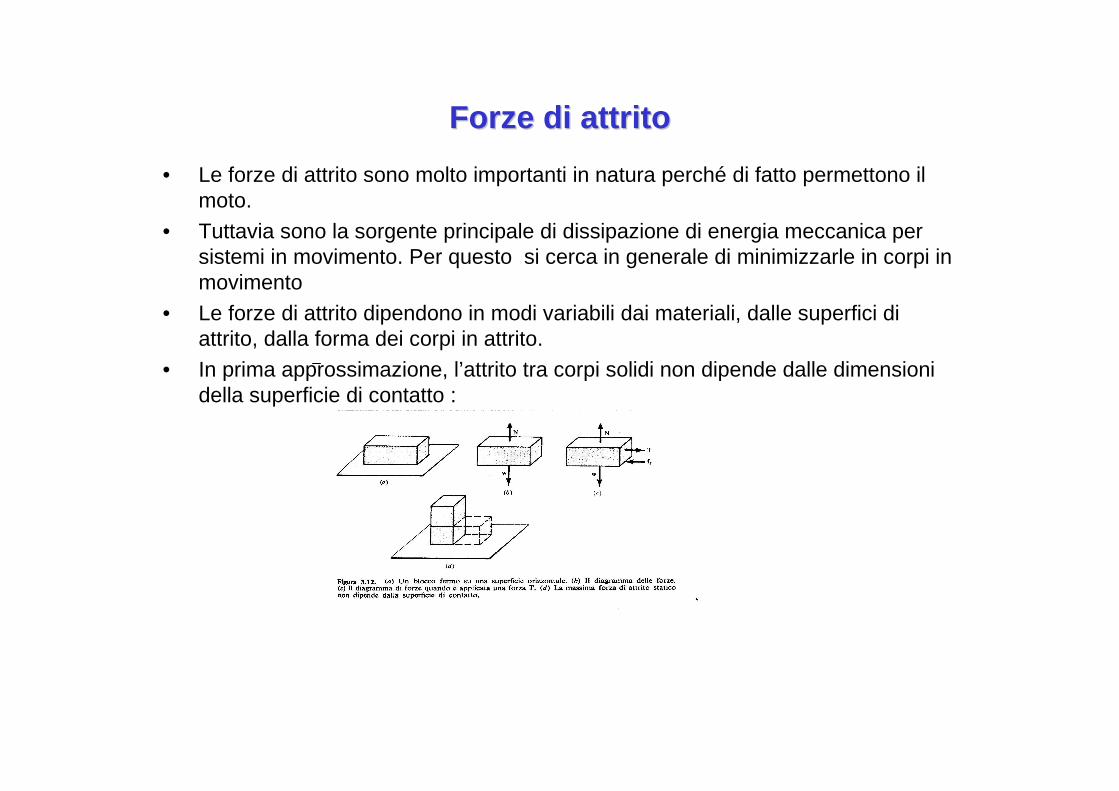
• Le forze di attrito dipendono in modi variabili dai materiali, dalle superfici di attrito, dalla forma dei corpi in attrito.
• In prima approssimazione, l’attrito tra corpi solidi non dipende dalle dimensioni della superficie di contatto :
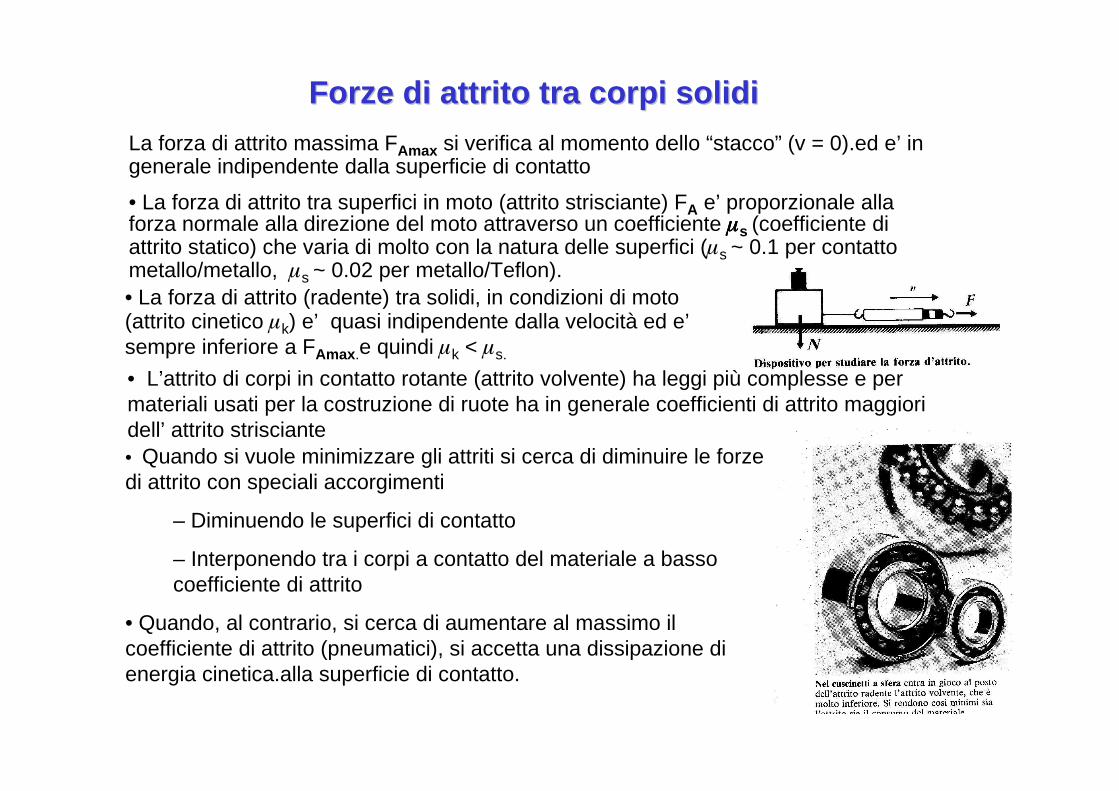
Forze di attrito tra corpi solidiForze di attrito tra corpi solidiLa forza di attrito massima FAmax si verifica al momento dello “stacco” (v = 0).ed e’ in generale indipendente dalla superficie di contatto
• La forza di attrito tra superfici in moto (attrito strisciante) FA e’ proporzionale alla forza normale alla direzione del moto attraverso un coefficiente µµµµs (coefficiente di attrito statico) che varia di molto con la natura delle superfici (µs ~ 0.1 per contatto metallo/metallo, µs ~ 0.02 per metallo/Teflon).
• L’attrito di corpi in contatto rotante (attrito volvente) ha leggi più complesse e per materiali usati per la costruzione di ruote ha in generale coefficienti di attrito maggiori dell’ attrito strisciante
• La forza di attrito (radente) tra solidi, in condizioni di moto(attrito cinetico µk) e’ quasi indipendente dalla velocità ed e’sempre inferiore a FAmax .e quindi µk < µs.
• Quando si vuole minimizzare gli attriti si cerca di diminuire le forze di attrito con speciali accorgimenti
– Diminuendo le superfici di contatto
– Interponendo tra i corpi a contatto del materiale a basso coefficiente di attrito
• Quando, al contrario, si cerca di aumentare al massimo il coefficiente di attrito (pneumatici), si accetta una dissipazione di energia cinetica.alla superficie di contatto.
Forze di attrito viscosoForze di attrito viscoso
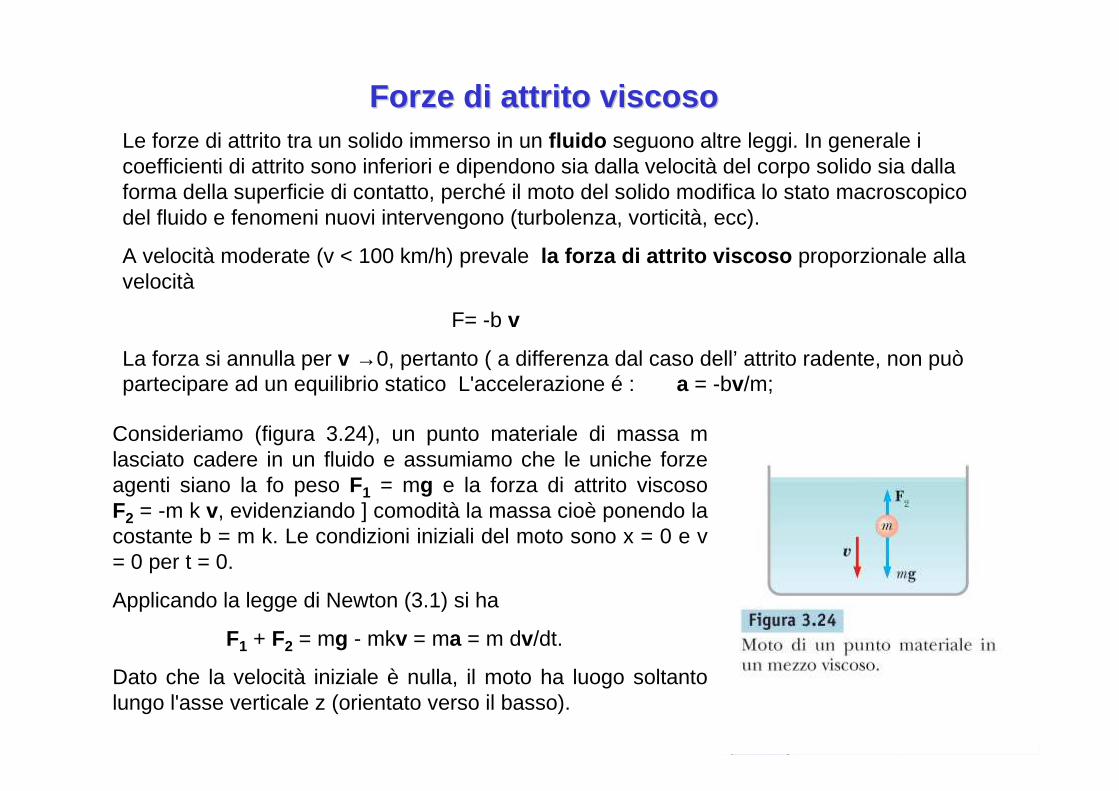
Consideriamo (figura 3.24), un punto materiale di massa m lasciato cadere in un fluido e assumiamo che le uniche forze agenti siano la fo peso F1 = mg e la forza di attrito viscoso F2 = -m k v, evidenziando ] comodità la massa cioè ponendo la costante b = m k. Le condizioni iniziali del moto sono x = 0 e v = 0 per t = 0.
Applicando la legge di Newton (3.1) si ha
F1 + F2 = mg - mkv = ma = m dv/dt.
Dato che la velocità iniziale è nulla, il moto ha luogo soltantolungo l'asse verticale z (orientato verso il basso).
Le forze di attrito tra un solido immerso in un fluido seguono altre leggi. In generale i coefficienti di attrito sono inferiori e dipendono sia dalla velocità del corpo solido sia dalla forma della superficie di contatto, perché il moto del solido modifica lo stato macroscopico del fluido e fenomeni nuovi intervengono (turbolenza, vorticità, ecc).
A velocità moderate (v < 100 km/h) prevale la forza di attrito viscoso proporzionale alla velocità
F= -b v
La forza si annulla per v →0, pertanto ( a differenza dal caso dell’ attrito radente, non puòpartecipare ad un equilibrio statico L'accelerazione é : a = -bv/m;

Forze di attrito viscosoForze di attrito viscosoProiettiamo su z l'equazione del moto ottenendo per la velocità
Integrando entrambi i membri
Come mostrato in figura 3.25, partendo da zero la velocità cresce, sempre più lentamente. Per t » l/k, v assume praticamente il valore costante g/k. Sotto l'azione della sola forza peso il moto sarebbe uniformemente accelerato; la forza di attrito viscoso si oppone all'aumento della velocità, rendendo al limite il moto uniforme. In effetti si vede che per v = g/k l'accelerazione a - g- k v diventa nulla. τ = l/k è la costante di tempo del rallentamento .
Questo risultato asintotico si ottiene anche considerando come varia con la velocità il modulo della forza di attrito viscoso F, figura 3.26: esso cresce linearmente con la velocità, mentre la forza peso è costante. Quando la velocità assume il valore g/k la forza di attrito viscoso vale mg, si ha l'equilibrio dinamico tra attrito e peso e la loro risultante siannulla: di conseguenza la velocità non può più cambiare e si instaura un moto uniforme

Forze centripeteForze centripete
Se la risultante R delle forze agenti su un punto materiale ha una una componente FN ortogonale alla traiettoria, (che risulta pertanto curvilinea), questa forza determina una accelerazione centripeta secondo la relazione .FN = maN = mv2/r dove r il raggio di curvatura della traiettoria, (figura 3.28).
In generale R ha anche una componente tangente alla traiettoria, FT, responsabile della variazione del modulo della velocità. Se FT = 0 il moto lungo la traiettoria è uniforme e l'unica accelerazione è aN.
FT
Forze centripete sono generalmente prodotte da rotaie, pneumatici, fili che collegano il corpo ad un punto fisso ovverovincoli che consentono di incurvare la traiettoria oppure da azioni a distanza come quelle gravitazionali

Moti circolariMoti circolariEsempio Una massa m è sospesa ad un filo non estensibile di lunghezza I e ruota su una circonferenza di raggio r, con velocità v in modulo costante, con il filo che forma un angolo θcon la verticale, figura 3.29. Calcolare la velocità v della sferetta e la tensione T del filo.
Soluzione Sulla sferetta agisce la forza perso P e la tensione T del filo, per cui il moto è regolato dalla:
La componente della tensione del filo perpendicolare alla traiettoria fornisce la forza centripeta necessaria per il moto circolare uniforme e vale
La forza peso e’ equilibrata della componente verticale del filo:Dividendo membro a membro si ottiene:
mg= T cosθθθθ
Velocità lineare
Velocità angolareθ
ωlcos
g
r
v ==Tensione del filo
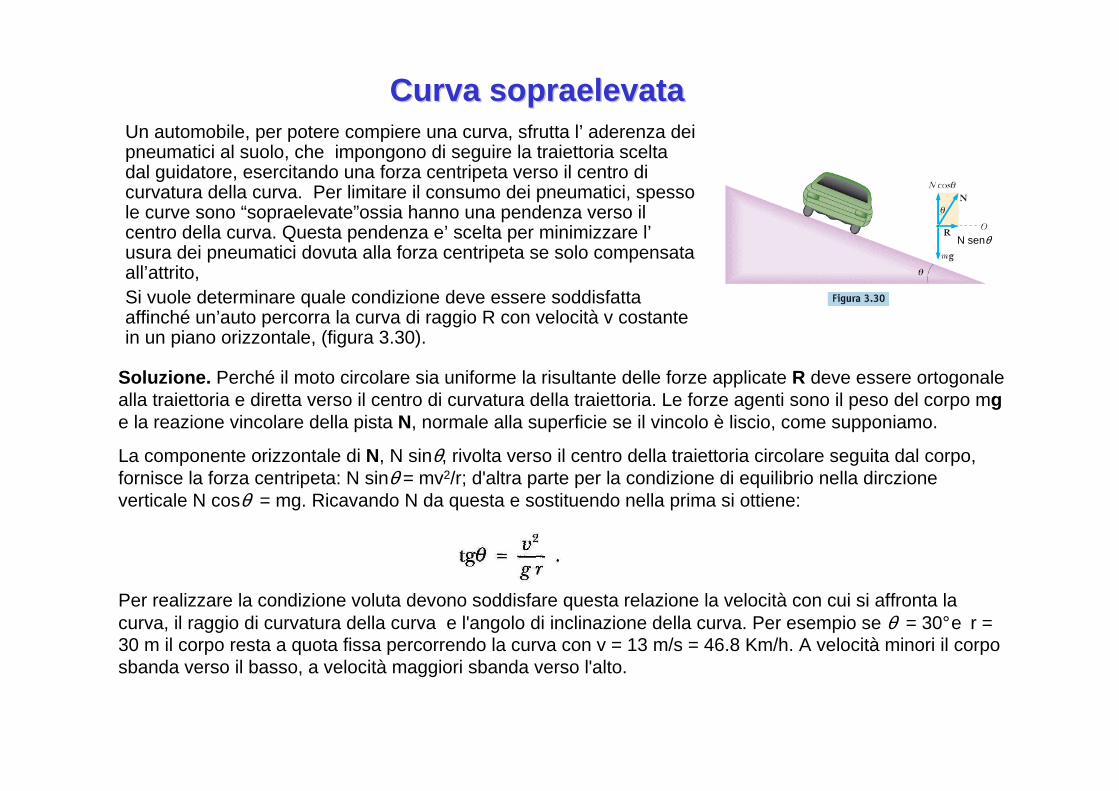
Curva sopraelevataCurva sopraelevataUn automobile, per potere compiere una curva, sfrutta l’ aderenza dei pneumatici al suolo, che impongono di seguire la traiettoria scelta dal guidatore, esercitando una forza centripeta verso il centro di curvatura della curva. Per limitare il consumo dei pneumatici, spesso le curve sono “sopraelevate”ossia hanno una pendenza verso il centro della curva. Questa pendenza e’ scelta per minimizzare l’usura dei pneumatici dovuta alla forza centripeta se solo compensata all’attrito, Si vuole determinare quale condizione deve essere soddisfatta affinché un’auto percorra la curva di raggio R con velocità v costante in un piano orizzontale, (figura 3.30).
N senθ
Soluzione. Perché il moto circolare sia uniforme la risultante delle forze applicate R deve essere ortogonale alla traiettoria e diretta verso il centro di curvatura della traiettoria. Le forze agenti sono il peso del corpo mge la reazione vincolare della pista N, normale alla superficie se il vincolo è liscio, come supponiamo.
La componente orizzontale di N, N sinθ, rivolta verso il centro della traiettoria circolare seguita dal corpo, fornisce la forza centripeta: N sinθ = mv2/r; d'altra parte per la condizione di equilibrio nella dirczioneverticale N cosθ = mg. Ricavando N da questa e sostituendo nella prima si ottiene:
Per realizzare la condizione voluta devono soddisfare questa relazione la velocità con cui si affronta la curva, il raggio di curvatura della curva e l'angolo di inclinazione della curva. Per esempio se θ = 30° e r = 30 m il corpo resta a quota fissa percorrendo la curva con v = 13 m/s = 46.8 Km/h. A velocità minori il corpo sbanda verso il basso, a velocità maggiori sbanda verso l'alto.
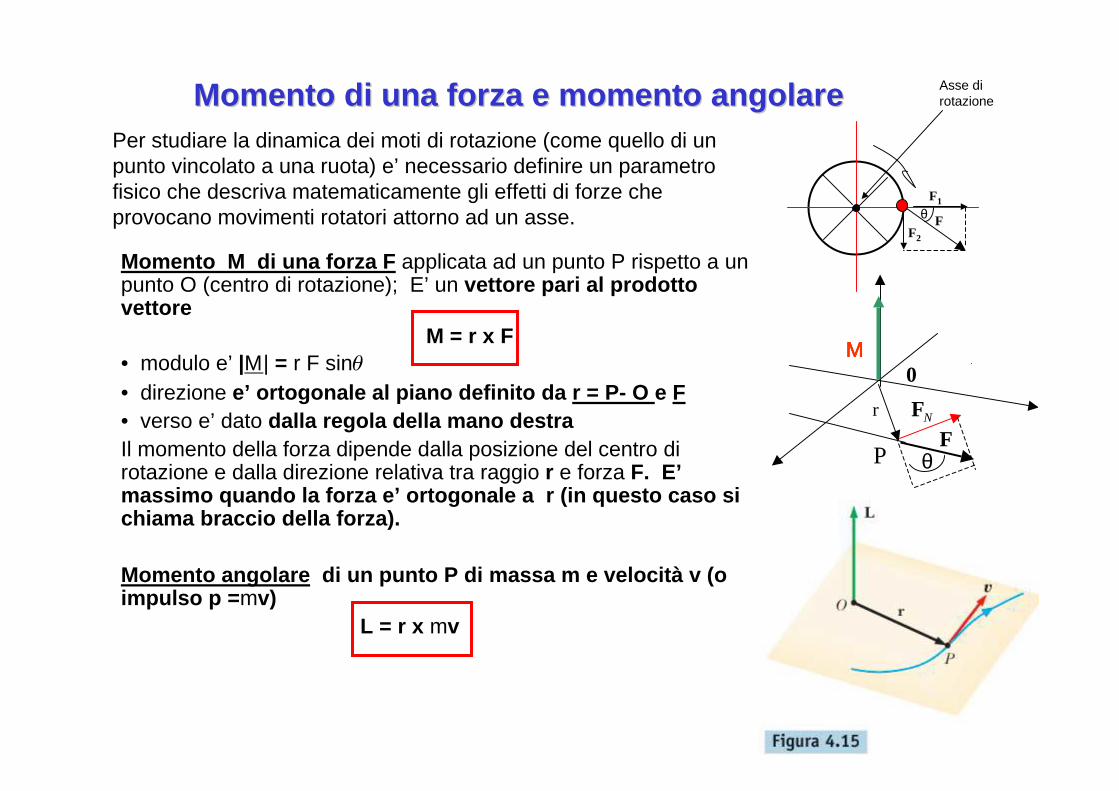
Momento di una forza e momento angolare Momento di una forza e momento angolare Per studiare la dinamica dei moti di rotazione (come quello di un punto vincolato a una ruota) e’ necessario definire un parametrofisico che descriva matematicamente gli effetti di forze che provocano movimenti rotatori attorno ad un asse. F
Asse di rotazione
F1
F2
θ
0ΜΜΜΜ
θPF
NF
Momento M di una forza F applicata ad un punto P rispetto a un punto O (centro di rotazione); E’ un vettore pari al prodotto vettore
M = r x F• modulo e’ |Μ| = r F sinθ• direzione e’ ortogonale al piano definito da r = P- O e F• verso e’ dato dalla regola della mano destraIl momento della forza dipende dalla posizione del centro di rotazione e dalla direzione relativa tra raggio r e forza F. E’ massimo quando la forza e’ ortogonale a r (in ques to caso si chiama braccio della forza).
Momento angolare di un punto P di massa m e velocità v (o impulso p = mv)
L = r x mv
r
Teorema del momento angolare Teorema del momento angolare
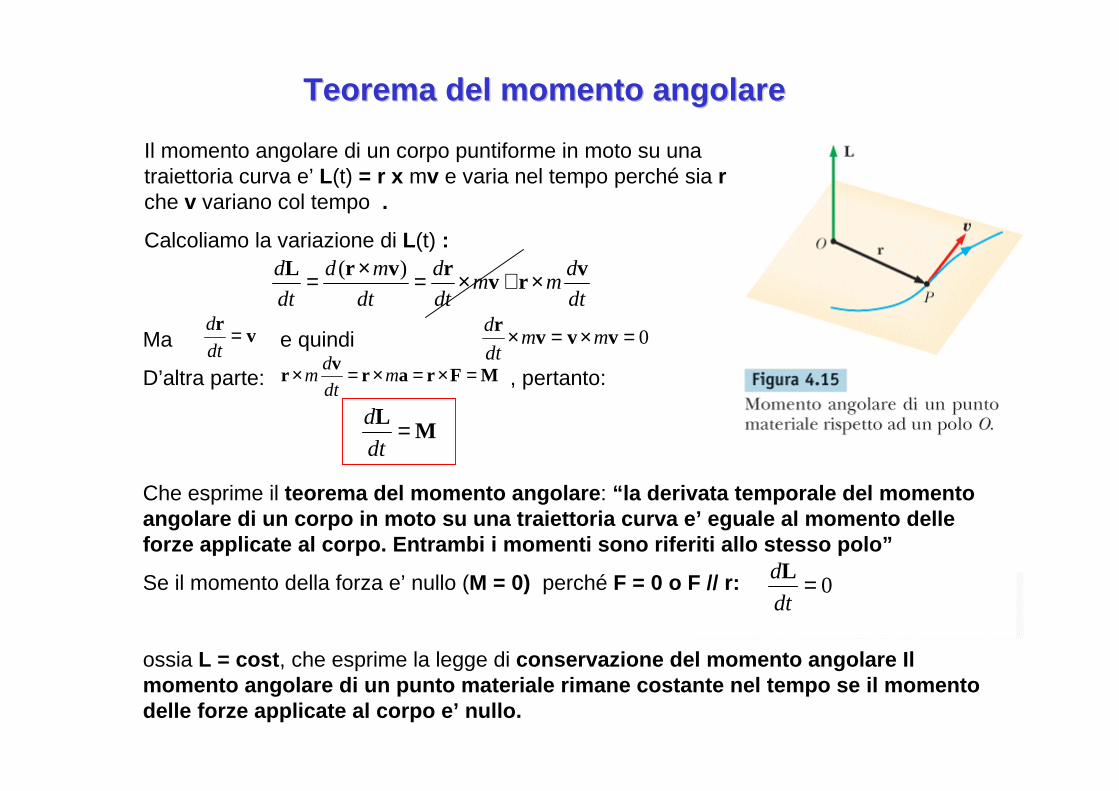
Il momento angolare di un corpo puntiforme in moto su una traiettoria curva e’ L(t) = r x mv e varia nel tempo perché sia r che v variano col tempo .
Calcoliamo la variazione di L(t) :
dt
dmm
dt
d
dt
md
dt
d vrv
rvrL ×+×=×= )(
vr =
dt
d0=×=× vvv
rmm
dt
d
MFrarv
r =×=×=× mdt
dm
ML =
dt
d
0=dt
dL
Ma e quindi
D’altra parte: , pertanto:
Che esprime il teorema del momento angolare : “la derivata temporale del momento angolare di un corpo in moto su una traiettoria cur va e’ eguale al momento delle forze applicate al corpo. Entrambi i momenti sono r iferiti allo stesso polo”
Se il momento della forza e’ nullo (M = 0) perché F = 0 o F // r:
ossia L = cost , che esprime la legge di conservazione del momento angolare Il momento angolare di un punto materiale rimane costa nte nel tempo se il momento delle forze applicate al corpo e’ nullo.

Dinamica di moti di rotazione di un punto materialeDinamica di moti di rotazione di un punto materiale
• La componente T della forza F (tensione della corda), applicata radialmente produce un’ accelerazione centripeta T = mar ,ma non produce alcun momento rispetto al centro C perché e’ parallela al raggio.
• La componente F a = m aT applicata perpendicolarmente alla corda Fa produce un momento |Μ| Μ| Μ| Μ| = |Fa||r|. Pertanto l’ equazione del moto si può scrivere:
dove αααα e’ l’ accelerazione angolare vettoriale .
Dimensioni fisiche del momento di inerzia [I] =[m]*[r] 2= kg*m2
Il momento di inerzia non dipende solo dal solo dalla massa del corpo ma anche dalla sua posizione rispetto al centro di rotazione. Una piccola massa a una grande distanza dal centro ha lo stesso momento di inerzia di una massa maggiore a distanza inferiore.
Le equazioni della dinamica di un moto di rotazione si ricavano applicando la II legge di Newton come nel caso dei moti di traslazione. Se una forza F agisce sulla massa m in moto rotatorio:
F
αrarFM Ta2mrrmam T =⋅=×=×=
• Se definiamo “momento di inerzia” del punto P rispetto al centro C la quantità:
l’ equazione del moto rotatorio si può scrivere: formalmente equivalente alla valida per i moti di traslazione.
αM ⋅= IaF ⋅= m
2mrI =

II pendolo semplice ( figura 3.32), è costituito da un punto materiale appeso tramite un filo inestensibile e di massa trascurabile. La posizione di equilibrio statico è quella verticale, con il punto fermo ed il filo teso; la forza esercitata dal filo (tensione del filo) vale in modulo TF= mg.
Se spostiamo il punto dalla verticale esso inizia ad oscillare attorno a questa, lungo un arco di circonferenza di raggio L, pari alla lunghezza del filo, in un piano verticale.
Le equazioni del pendolo si possono ottenere sia utilizzando la II legge della dinamica o in modo più diretto la definizione di momento della forza e di momento di inerzia
Nel primo modo consideriamo le componenti lungo la traiettoria, orientata come in figura 32, e perpendicolari alla traiettoria (verso positivo da P a O) :
.
Per s < 0, la forza è diretta secondo il verso assunto positivo, mentre per s > O la forza è diretta secondo verso negativo (e il risultato non dipende dalla scelta del verso di s) . Fisicamente RT indica una forza di richiamo che tende a riportare il punto sulla verticale, anche se on è di direzione costante come nel caso delle forze elastiche.
La forza Rn e’ annullata dalla tensione del filo
Esempio : pendolo sempliceEsempio : pendolo semplice
r
s
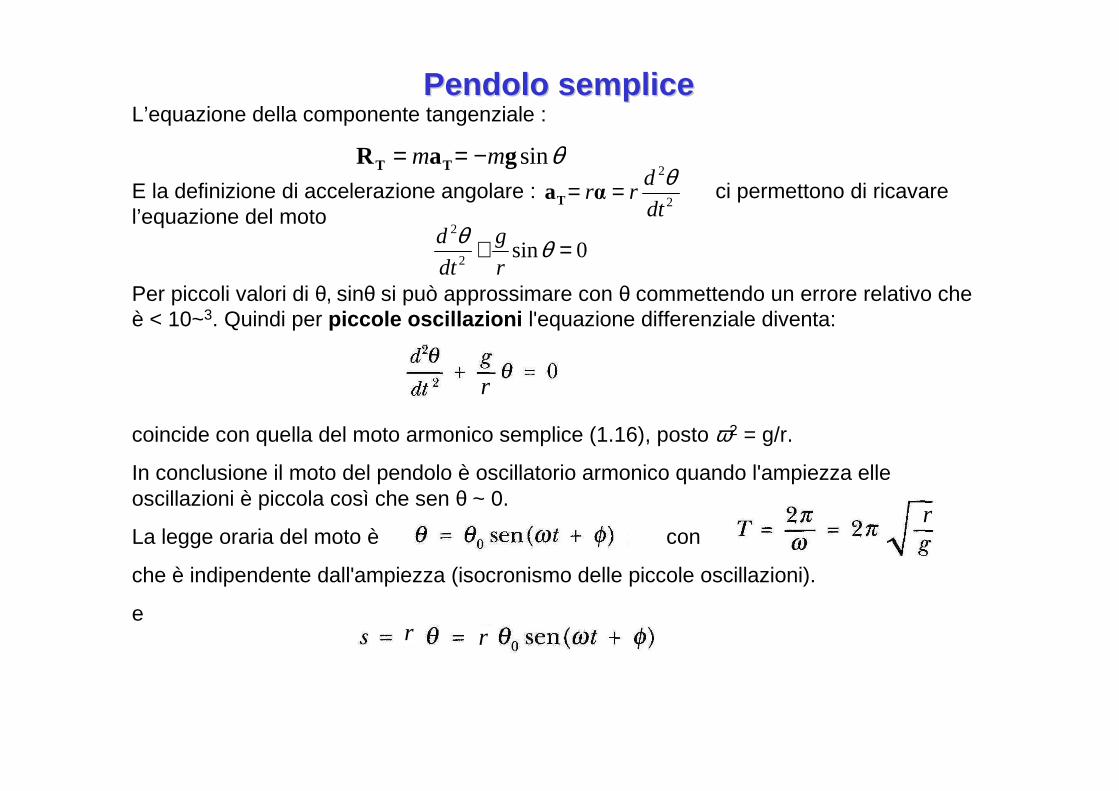
L’equazione della componente tangenziale :
E la definizione di accelerazione angolare : ci permettono di ricavare l’equazione del moto
Per piccoli valori di θ, sinθ si può approssimare con θ commettendo un errore relativo che è < 10~3. Quindi per piccole oscillazioni l'equazione differenziale diventa:
coincide con quella del moto armonico semplice (1.16), posto ω2 = g/r.
In conclusione il moto del pendolo è oscillatorio armonico quando l'ampiezza elle oscillazioni è piccola così che sen θ ~ 0.
La legge oraria del moto è con
che è indipendente dall'ampiezza (isocronismo delle piccole oscillazioni).
e
Pendolo semplicePendolo semplice
θsingaR TT mm −==
2
2
dt
drr
θ== αaT
0sin2
2
=+ θθr
g
dt
d
r
r
r r

Pendolo semplicePendolo semplice
r
M
Che diventa :
ossia esattamente come calcolato nell’ esempio precedente. Il pendolo semplice e’ un altro esempio di moto armonico, simile al pendolo a molla Da notare il confronto fra le dipendenze dei periodi
Pendolo a molla Pendolo semplice
In un modo più diretto, utilizzando le definizioni di momento della forza e momento di inerzia :
αM ⋅= I
La forza agente sul punto P e’ il peso mg, il cui momento vale
M = r x mg = - r mg sinθ
Applicando l’equazione del moto e la definizione di momento di inerzia si ottiene:
2
222sin
dt
dmrmrrmg
θαθ ==−
2mrI =
rω
k
m
g
rT π2=
k
mT π2=
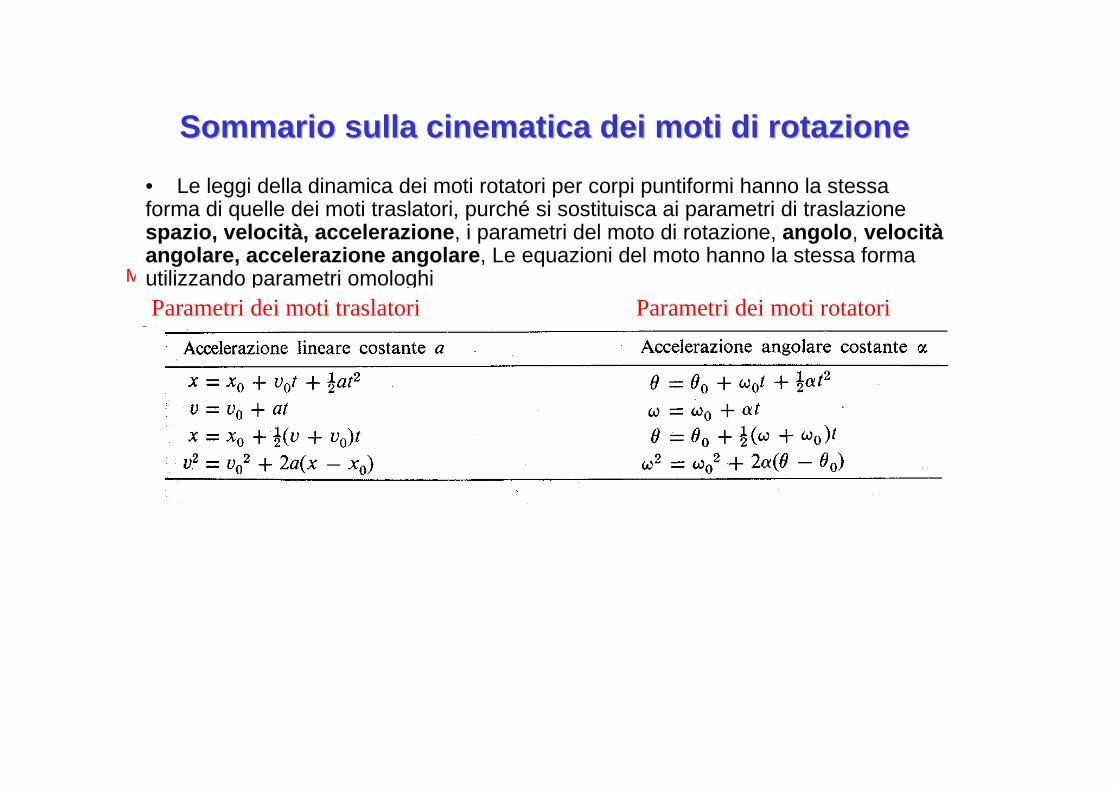
Sommario sulla cinematica dei moti di rotazioneSommario sulla cinematica dei moti di rotazione
Moto lineare uniformemente accelerato Moto circolare uniformemente accelerato
• Le leggi della dinamica dei moti rotatori per corpi puntiformi hanno la stessa forma di quelle dei moti traslatori, purché si sostituisca ai parametri di traslazione spazio, velocità, accelerazione , i parametri del moto di rotazione, angolo , velocità angolare, accelerazione angolare , Le equazioni del moto hanno la stessa forma utilizzando parametri omologhiParametri dei moti traslatori Parametri dei moti rotatori

Parametri dinamici dei moti di rotazioneParametri dinamici dei moti di rotazione
M M
M
M
M
M
• La definizione di momento di inerzia ci permette di scrivere le equazioni di un moto di rotazione in funzione dei momenti delle forze applicate al corpo e della accelerazione angolare, nella stessa forma della seconda legge della dinamica.


















