
MECANISME ANGRENAJE 5
22
11.03.22 11.03.22 1 ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALE ŞI HIPERBOLOIDALE
description
MECANISME
Transcript of MECANISME ANGRENAJE 5

13.04.2313.04.23 11
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE

13.04.2313.04.23 22
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Ang
rena
j con
ic
(ext
erio
r)
2
×
×
1
2
1
Ang
rena
j mel
cat
(m
elc–
roat
ă m
elca
tă) 1
2
×
1(dr)
2
1(dr)
2
b
c

13.04.2313.04.23 33
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Particularităţi geometrice ale angrenajelor coniceParticularităţi geometrice ale angrenajelor conice
Angrenaj conic =
Angrenaj cu axe concurente =
Angrenaj sferic
Angrenaj cilindric =
Angrenaj sferic în care punctul de intersecţie al axelor este la infinit.
Consecinţe pt. angrenajul conic:
1. Cercurile din plan devin cercuri pe sferă
2. Cilindrii devin conuri
3. Evolventa plană devine evolventă sferică
4. Cilindrii evolventici devin conuri evolventice

13.04.2313.04.23 44
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Particularităţi geometrice ale angrenajelor coniceParticularităţi geometrice ale angrenajelor conice
Consecinţe pt. angrenajul conic:
5. Linia de angrenare devine cerc diametral
6. Cremaliera plană de referinţă devine roată plană de referinţă
7. Roata plană de referinţă se obţine mărind la 180o unghiul conului unei roţi conice
8. Flancurile roţii plane nu mai sunt drepte ci curbe.
9. Centroide: plan de divizare si con de divizare
10. Două roţi conice evolventice pot angrena între ele dacă roţile plane de referinţă au profiluri identice pe orice sferă
11. Deplasare radială xr şi deplasare
tangenţială xt.

13.04.2313.04.23 55
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Aproximarea angrenajului conic eveloventic cu Aproximarea angrenajului conic eveloventic cu angrenajul conic octoidalangrenajul conic octoidal
Concluzii
• Avantaj tehnologic
• Linia de angrenare devine octoidă sferică
• Nu mai poate fi realizat ca angrenaj deplasat (nedeplasat sau zero deplasat)
• Parametrii intrinseci ai unui angrenaj octoidal:
• Numărele de dinţi z
• Geometria profilului de referinţă al roţii plane şi modulul pe sfera exterioară (m)
• Unghiul dintre axe
• Coeficienţii deplasărilor de profil xr ş xt

13.04.2313.04.23 66
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALEAngrenajul frontal plan Angrenajul frontal plan
echivalent unui echivalent unui angrenaj frontal sfericangrenaj frontal sferic
Concluzii
• Plan frontal devine sferă frontală
• Geometria pe sferă este mai complicată, în proiectare se utilizează angrenajul plan echivalent pentru calcule de rezistenţă şi verificarea condiţiilor de funcţionare (interferenţă, sa, )
• Angrenajul plan echivalent se consideră aproximativ evolventic
• Aproximaţia zonelor sferice care conţin profilele dinţilor cu suprafeţe conice tangente la sferă după cercurile de divizare : aproximaţia Tredgold

13.04.2313.04.23 77
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Parametrii geometrici ai roţii planeParametrii geometrici ai roţii plane
• 3 cilindri frontali reprezentativi
• Dantura octoidală -> flancuri drepte
• Profil de referinţă: profilul exterior

13.04.2313.04.23 88
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Geometria roţilor coniceGeometria roţilor conice
Concluzii
• 3 sfere frontale reprezentative şi respectiv 3 conuri frontale
• Desfăşurarea în plan a conurilor frontale -> angrenaj plan echivalent
• Exterior pt. calcule geometrice
• Median pt. calcule de rezistenţă
• nr. de dinţi ai roţilor plane echivalente
z1,2v = z1,2 / cos 1,2
• Distanţa dintre axe pt. angrenajul plan echivalent
av = 0.5 * m* (z1v + z2v )

13.04.2313.04.23 99
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
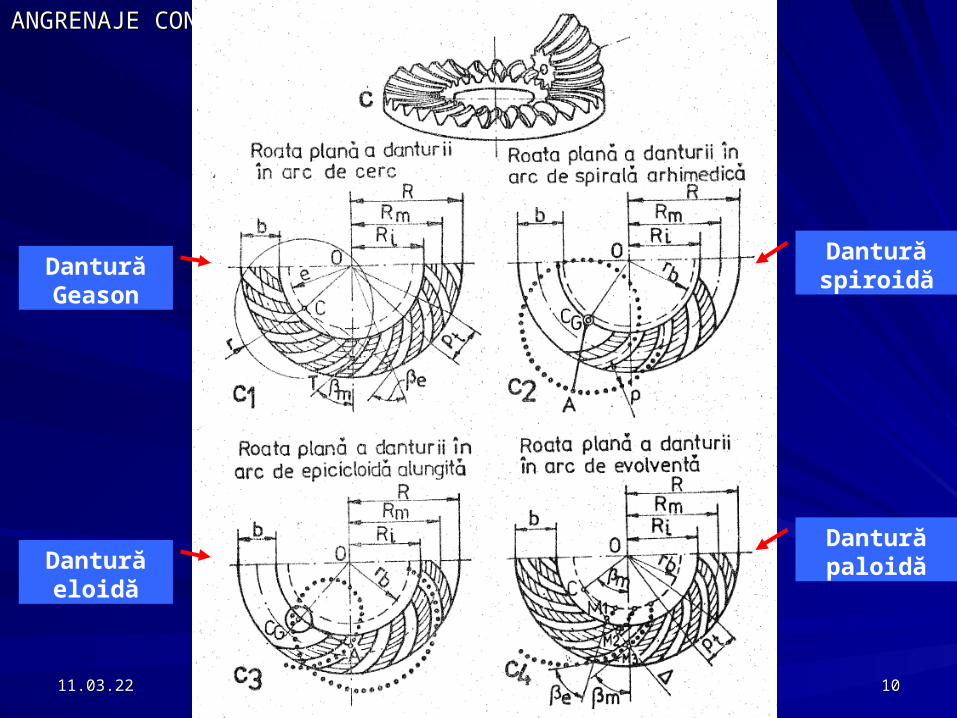
SistematizareaSistematizarea roroţţilor conice ilor conice după forma roţii după forma roţii plane de referinţăplane de referinţă
13.04.2313.04.23 1010
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Dantură spiroidă
Dantură Geason
Dantură eloidă
Dantură paloidă

13.04.2313.04.23 1111
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Particularităţi geometrice ale angrenajelor Particularităţi geometrice ale angrenajelor hiperboloidalehiperboloidale
Angrenaj hiperboloidal
Angrenaj elicoidal
Angrenaj melcat
Angrenaj hipoid

13.04.2313.04.23 1212
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Geometria roţilor Geometria roţilor hiperboloidalehiperboloidale
Concluzii
• Flancurile dinţilor nu mai pot fi generate prin rostogolirea unui plan peste un hiperboloid
• In practica, axoidele sunt aproximate cu suprafeţe desfăşurabile în plan: cilindri, conuri
• Axoidele angrenajului hiperboloidal se rostogolesc cu alunecare de-a lungul axei instantanee de rotaţie!
• Dezavantaj: pierderi prin frecare şi uzura dinţilor!

13.04.2313.04.23 1313
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Geometria angrenajelor Geometria angrenajelor elicoidaleelicoidale
Concluzii
• Roţi cilindrice cu dantură înclinată cu 1 ≠ 2
• Raportul de transmitere depinde de numerele de dinţi z1,2 şi de unghiul dintre axele roţilor
• Cremalierele de referinţă au acelaşi profil normal
• Dacă unghiul dintre axe este 90o, raportul de transmitere depinde numai de z1,2
i12 = r2/r1 ∙cos 2/cos 1

13.04.2313.04.23 1414
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
ŞŞevevăăruirearuirea

13.04.2313.04.23 1515
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaje melcateAngrenaje melcate
Concluzii
• Angrenaj elicoidal în care una dintre roţi (melc) are un număr mic de dinţi şi unghi mare de înclinare 0
• Melc cilindric – roată cilindrică contact punctiform
• Contact liniar
a) Angrenaj melcat cilindric: melc cilindric şi roata cuprinde melcul (dantură toroidală)
b) Angrenaj melcat globoidal: roata cilindrică şi melc globoidal
• Angrenajul melcat cu contact liniar este caracterizat prin melcul de referinţă

13.04.2313.04.23 1616
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaj melcatAngrenaj melcat cilindric cilindric
Concluzii
• Melc de referinţă: fictiv, pt. definirea geometrică a angrenajului
• Melc generator
• Melc de funcţionare: melc real, forma şi dimensiunile melcului de referinţă
• După modul de generare:
a) Melci riglaţi:
• Kb melc evolventic ZE
• K || Kb melc convolut ZN1, ZN2
• K || Kb în plan axial melc arhimedic ZA
b) Melci neriglaţi

13.04.2313.04.23 1717
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaj melcatAngrenaj melcat cilindric cilindric
Melcevolventic
Melciconvoluţi

13.04.2313.04.23 1818
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaj melcatAngrenaj melcat cilindric cilindric
Melcarhimedic
MelcNeriglat ZK1 (sup.
dublu conică)
MelcNeriglat ZK2 (sup.
conică)

13.04.2313.04.23 1919
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaj melcatAngrenaj melcat cilindric cilindric
Melcde referinţă

13.04.2313.04.23 2020
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaj melcatAngrenaj melcat cilindric cilindric
Mărimi standardizate: mx şi q = z1∙ctg 0 – coeficient diametral

13.04.2313.04.23 2121
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaj melcatAngrenaj melcat globoidalgloboidal

13.04.2313.04.23 2222
ANGRENAJE ANGRENAJE CONICE CONICE ŞI HIPERBOLOIDALEŞI HIPERBOLOIDALE
Angrenaje hipoideAngrenaje hipoide
Angrenaj hipoid conic
Angrenaj hipoid melcat


















