
McMaster Sumobot 2015 - Group Eh!
8
McMaster SumoBot Club Team Presentation : Group EH! Braden Corbold Colin Gillespie Jack Gillies BoHan Zhang November 12 th , 2015
-
Upload
jack-gillies -
Category
Engineering
-
view
153 -
download
3
Transcript of McMaster Sumobot 2015 - Group Eh!

McMaster SumoBot Club
Team Presentation : Group EH!
Braden Corbold Colin Gillespie Jack GilliesBoHan Zhang
November 12th, 2015

Overview
• Structural Design
• Powertrain Components
• Electronic Systems
• Software Algorithm

Structural Design• 1/4” & 3/16” Polycarbonate Sheets
• Steel L-Brackets & Stove Bolts
• Stainless Steel Cookie Sheet
• Battery mass centered over wheels

Drive Train • 14V Roomba Motors – 300 mA draw @ 18V
• L-Bracket Mounts
• Belt connection ~2:1 Ratio
• Ryobi 18V 3Ah Ni-Cd Tool Battery
• PWM Power Control via L298
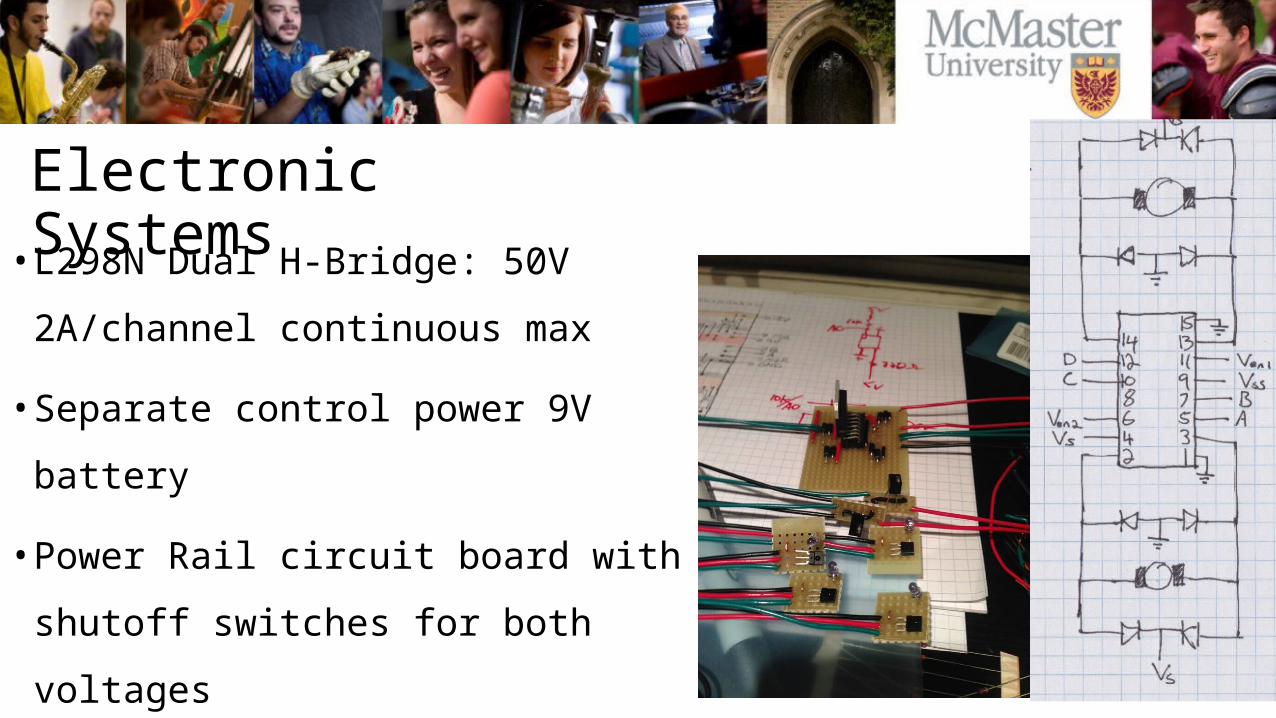
Electronic Systems• L298N Dual H-Bridge: 50V 2A/channel
continuous max
• Separate control power 9V battery
• Power Rail circuit board with shutoff
switches for both voltages
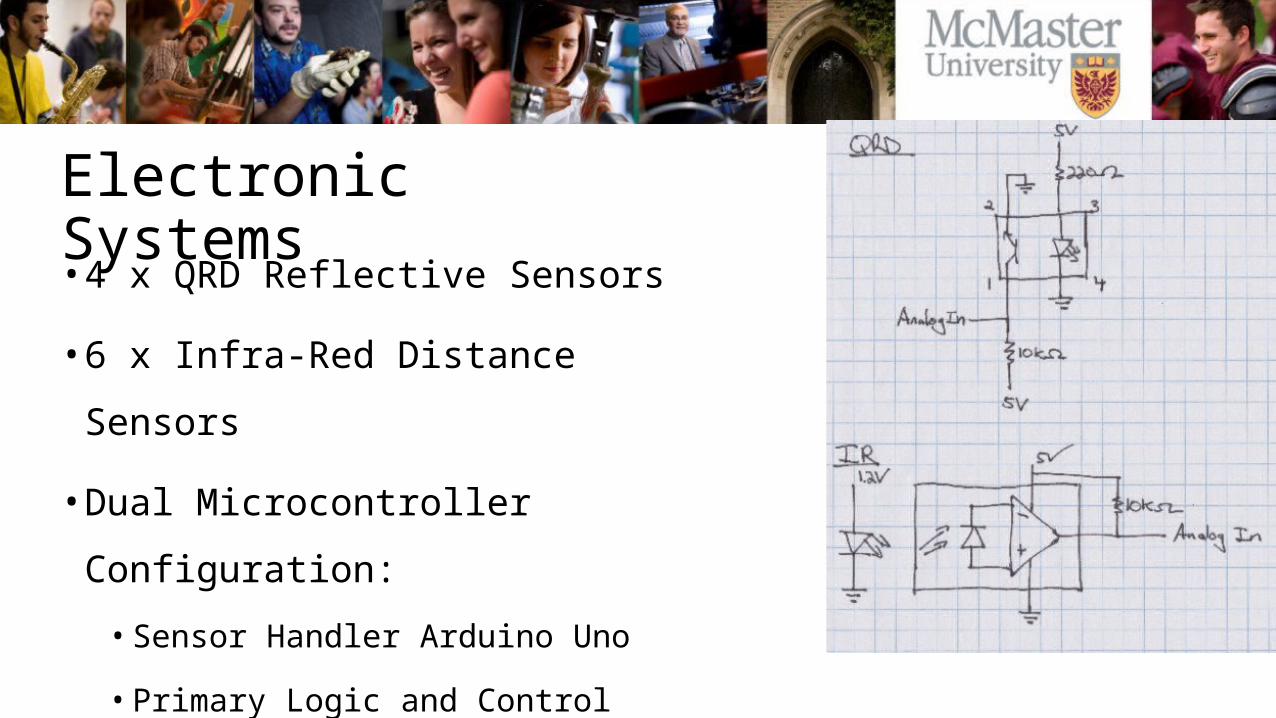
Electronic Systems• 4 x QRD Reflective Sensors
• 6 x Infra-Red Distance Sensors
• Dual Microcontroller Configuration:
• Sensor Handler Arduino Uno
• Primary Logic and Control Arduino Uno

Software Algorithm
• Finite State Machine executed as Switch Case• Seek opponent by default • Comparison of left & right front sensor data • Execute Ram when proximity is below certain
threshold • Constantly poll QRD sensors

Question Period


















