Département matières et matériaux - ULB - Lab'InSight Mise en forme des matériaux

SII – PTSI / CI 11 – Concevoir et réaliser tout ou partied’un système ou d’un prototype
Matériaux
Structure
Propriété
Performance
Procédé
Caractérisation
ObjectifsLa science des matériaux regroupe l’étude et la mise en œuvre des matériauxqui constituent les pièces des systèmes : métaux, polymères, céramiques, etc.Elle repose sur la relation entre les propriétés et les performances d’un matériau.L’objectif de ce cours est de présenter les différentes familles de matériaux etleurs propriétés mécaniques identifiées à partir d’essais normalisés. Il s’agit depouvoir identifier un matériau à partir de sa désignation et de donner un ordrede grandeur de ses caractéristiques physiques et mécaniques.

Table des matières
1 Introduction 31.1 Classes de matériaux . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Critères de choix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Propriétés mécaniques et essais 62.1 Essai de traction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Essai de flexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3 Essai de torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.4 Essai de résilience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5 Essai de dureté . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6 Essai de fatigue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Propriétés physiques 17
4 Matériaux métalliques 184.1 Aciers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.2 Fontes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.3 Alliages d’aluminium . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.4 Alliages de cuivre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
€
Nicolas Mesnier, lycée Jules Ferry, VersaillesAnnée 2018–2019

1 Introduction
La maîtrise de nouveaux matériaux a été à l’origine de révolutions dans l’histoire destechnologies. À chaque époque de la préhistoire, on associe souvent les matériaux employés :l’âge de pierre, l’âge du bronze, du fer, etc. Aujourd’hui, le nombre de matériaux ou entout cas le nombre de références est considérable et en constante augmentation. En effet,la science des matériaux permet de concevoir de nouveaux matériaux adaptés à chaquenouvelle application. D’un point de vue ingénierie, on distingue deux grandes catégoriesde matériaux :
— les matériaux de structure, essentiellement utilisés pour leurs capacités à soutenirdes sollicitations mécaniques et thermiques ;
— les matériaux fonctionnels, utilisés pour leurs propriétés physiques, telles que conduc-tivité ou semi-conductivité électrique, magnétisme, propriétés optiques. . .
Certains matériaux se trouvent à la frontière entre les applications mécaniques et physiques,comme par exemple les matériaux piézo-électriques qui peuvent se déformer lorsqu’on lessoumet à une différence de potentiel électrique. Cependant, même en se restreignant auxmatériaux de structure, le nombre de matériaux existant reste considérable. L’objectif dece cours n’est donc pas de les étudier de manière exhaustive, mais d’apporter des élémentsde compréhension permettant d’analyser, voire de trouver une solution matériau, pourune application donnée.
1.1 Classes de matériaux
Le nombre de matériaux est en constante évolution et de nouveaux matériaux sontsans cesse conçus pour répondre aux besoins d’applications spécifiques. Les interactionsélectroniques (liaisons) entre atomes permettent de distinguer trois grandes familles dematériaux : les métaux et alliages métalliques, les verres et céramiques et les polymèresorganiques. Les matériaux composites sont un mélange hétérogène de matériaux issus desdifférentes familles.
Métaux et alliagesmétalliques
Verres etcéramiques
Polymèresorganiques
Composites
Figure 1 – Classification des matériaux.
3

Métaux et alliages métalliques (liaisons métalliques)Ce sont les matériaux les plus employés pour les applications de structure. Lesmétaux sont capables de se déformer de manière permanente (ductiles) ce qui permetde réaliser des opérations de mise en forme par déformation plastique (emboutissage,forge, estampage) ou d’assemblage par déformation plastique (rivetage, clinchage).Les liaisons métalliques sont fortes et, comme les électrons sont libres de se mouvoirdans tout le cristal, les métaux sont assez denses et bons conducteurs thermiques etélectriques. 90 % des métaux utilisés sont ferreux (aciers et fontes), les autres sontnon ferreux (alliages de cuivre, d’aluminium, de magnésium, de titane, etc.).
Exemples d’applications : pièces de transmission de puissance, mobilier urbain enacier galvanisé, tôles en acier, filtres, électrodes de batterie, coupe-flammes en moussemétallique, etc.
Verres et céramiques (liaisons inoniques)Ce sont les matériaux les plus anciens et les plus couramment utilisés en génie civil(pierre, brique, verre). Ces matériaux sont résistants à l’abrasion mais pas aux chocs :ils sont fragiles. On peut souvent les mettre en œuvre à l’état pâteux (exemple dubéton) car ils ne deviennent fragiles qu’après la prise. Caractérisés par des liaisonsioniques très fortes, ils sont généralement poreux donc moins denses que les métauxet bons isolants thermique et électrique.
Exemples d’applications : vitres, disques de frein en carbone-céramique, outils demachine-outil en carbure de tungstène, pot catalytique en zircone, etc.
Polymères (liaison covalente, de Van Der Waals ou hydrogène)Souvent appelés « plastiques », les polymères organiques sont de larges macromolé-cules que l’on peut regrouper dans trois catégories : les thermoplastiques (recyclableset ductiles, comme les métaux), les thermodurcissables et les élastomères. Si lesliaisons covalentes sont très fortes, les liaisons de Van der Waals et hydrogène sontfaibles. Les polymères sont donc en général mauvais conducteurs thermique et élec-trique, mais par contre très peu denses et peuvent être mis en forme facilement.
Exemples d’applications : bouteilles d’eau en polytéréphtalate d’éthylène (PET), CDen polycarbonate (PC), vêtements en polyéthylène (PE), Rilsan, Gore-Tex, bouteillesde lait, canalisations en polyéthylène haute densité (PEHD), pièces mécaniques enpolyamide, mousses d’isolation en polyuréthane (PUR), sacs biodégradables en acidepolylactique (PLA), etc.
Remarque 1.1 (Interactions électroniques)Les liaisons ioniques ou covalentes sont très fortes, les liaisons métalliques sont fortes etles liaisons de Van der Waals et hydrogène sont faibles. Plus une liaison est forte, plus :
— le matériau a tendance à cristalliser ;— la densité est élevée ;— la température de fusion est élevée ;— la rigidité est élevée.
4

Matériaux composites L’un des développements majeurs de ce dernier quart de sièclea été celui des matériaux composites. Par définition, les matériaux composites sont aumoins constitués de deux matériaux distincts séparables mécaniquement. Le plus souvent,les composites sont constitués de deux matériaux : l’un sous forme de fibres et l’autre sousforme de matrice – permettant de lier les fibres – de sorte que le nouveau matériau acquiertdes propriétés supérieures à celles des seuls constituants. De par ce fait, les matériauxcomposites améliorent les possibilités de conception en permettant d’alléger des structureset de réaliser des formes complexes. Les matériaux composites à hautes performances,fréquemment employés pour des applications de structure exigeantes, sont le plus souventconstitués d’une matrice à base de polymères thermodurcissables (époxy) et de renfort enfibres de verre, de carbone ou d’aramide 1.
Exemples d’applications : coques de bateaux, pales d’hélicoptères, aubes de turbine, casquesde moto, skis, surfs, planches à voile, arbres de transmission, etc.
1.2 Critères de choix
Le choix d’un ou plusieurs matériaux pour une pièce se fait lors du processus deconception. Ce choix comprend généralement trois volets : le matériau constituant lecomposant, le procédé permettant de le mettre en forme et sa tenue en service. Hormisl’aspect économique, fonction de la rareté du matériau et de la série fabriquée, ce choixest dicté par un certain nombre de critères dont les principaux peuvent être :
— formes et dimensions des pièces à obtenir (enveloppes minces, symétries, etc.) ;— propriétés physiques (électriques, thermiques, magnétiques, optiques, densité, etc.)
ou chimiques (résistance à la corrosion, revêtements, aptitude au collage, etc.) ;— propriétés mécaniques (résistance en traction, en flexion, aux chocs, dureté, etc.) ;— mise en forme (moulage, usinage, soudage, . . .).
Par exemple, si la pièce doit transmettre une puissance mécanique élevée, on choisira unmatériau résistant aux actions mécaniques. Si la pièce doit être en contact avec une sourcede chaleur, on choisira, selon le cas, un matériau avec une bonne conductivité thermiqueou au contraire plutôt isolant. Dans tous les cas, les critères de choix des matériaux sontbasés sur l’optimisation d’un certain nombre de critères. Afin de choisir réellement lemeilleur matériau, il faut partir de l’ensemble des matériaux disponibles sans a priori.Puis, on élimine les candidats ne répondant pas aux contraintes imposées. Pour classer lescandidats, il est nécessaire d’utiliser des données chiffrées et on construit généralement unindice de performance sous la forme d’un produit de caractéristiques Ci
I =∏
i
(Ci)αi
dont les exposants αi déterminent l’importance de la caractéristique et sont positifssi la caractéristique est à maximiser et négatifs si elle est minimiser. Le mécaniciens’intéresse plutôt aux caractéristiques macroscopiques telles que les propriétés physiqueset mécaniques.
1. Les fibres d’aramide les plus connues sont commercialisées par Du Pont de Nemours (États-Unis)sous le nom de Kevlar.
5

2 Propriétés mécaniques et essais
Pour déterminer les propriétés mécaniques des matériaux, il est nécessaire de réaliserdes essais mécaniques. Le principal objectif de ces essais est la mise en place d’une loide comportement pour chaque matériau constituant les pièces d’un système. La loi decomportement établit une relation entre les contraintes (homogènes à une pression, c’est-à-dire une force par unité de surface), notées σ, et les déformations (allongement unitaireadimensionnel), notées ε. Cette loi de comportement sera généralement appliquée lors dudimensionnement d’une structure pour prédire son comportement en service. Pour ce typed’application, il n’est parfois pas nécessaire de faire appel à des lois compliquées et on secontente souvent de relations qui permettent de décrire simplement le comportement dumatériau dans un cas particulier. Cependant, comme la déformation d’une pièce dépendde sa géométrie et de la manière dont sont exercés les efforts extérieurs sur cette pièce, ilest nécessaire de normaliser les essais. Des normes définissent donc :
— la forme de la pièce d’essai dont on teste le matériau, on parle alors d’éprouvettenormalisée ;
— la façon dont doivent être exercés les actions mécaniques sur l’éprouvette, on parlealors d’essai normalisé.
Pour déterminer les propriétés mécaniques des matériaux, plusieurs essais normalisés sontclassiquement utilisés. Parmi les essais mécaniques, on distingue les essais destructifs etles essais non destructifs. Le contrôle non destructif (CND) permet de caractériser l’étatd’intégrité de structures ou de matériaux, sans les dégrader, soit au cours de la production,soit en cours d’utilisation, soit dans le cadre de maintenances. Dans ce cours nous netraiterons pas de ces méthodes mais seulement des essais « destructifs ».
Direction de sollicitation Lors de la réalisation d’essais mécaniques, le choix de ladirection de sollicitation peut s’avérer primordial. En effet, il conditionne souvent ledomaine de validité de la loi de comportement obtenue. On peut classer les directions desollicitation en deux grandes catégories : les sollicitations uniaxiales et les sollicitationsmultiaxiales. On parle alors d’essai uniaxial ou d’essai multiaxial. Pour les essais uniaxiaux,l’éprouvette n’est sollicitée que dans une seule direction. Les principaux essais uniaxiauxutilisés sont :
— l’essai de traction ;— l’essai de compression ;— l’essai de flexion ;— l’essai de torsion ;
Les essais multi-axiaux sont nombreux et variés mais beaucoup plus difficiles à interpréter.Ils consistent le plus souvent à combiner plusieurs sollicitations uniaxiales entre ellesau cours du temps, de façon à tester l’influence de la direction de sollicitation sur lecomportement du matériau. L’essai multiaxial le plus courant est celui de traction-torsion.
6

2.1 Essai de traction
Les essais de traction uniaxiale sont à la fois les plus simples et les plus courammentutilisés pour mettre en évidence les caractéristiques du comportement élasto-plastiquemécanique d’un matériau métallique. Cet essai consiste à placer une petite barre dumatériau à étudier entre les mâchoires d’une machine de traction qui tire sur la barrejusqu’à sa rupture. On enregistre l’allongement et la force appliquée (figure 2).
ℓ
F
∆ℓ (mm)
F (N)
traction-compression
traction
Figure 2 – Schématisation de l’essai de traction-compression.
Déroulement de l’essai Une fois l’éprouvette mise en place entre les mors de la machinede traction, on applique une légère précharge afin d’être sûr que l’on n’a pas de jeu. Puis,on effectue un déplacement de la travée qui a pour effet d’étirer l’éprouvette, et on mesurel’effort généré par ce déplacement ; le mouvement peut se faire par un système de vis sansfin ou un piston hydraulique, l’effort se mesure par la déformation élastique de la travéeou, plus communément, par un capteur de force inséré dans la ligne de charge. L’essais’arrête à la rupture de l’éprouvette.
Figure 3 – Machines de traction. Figure 4 – Éprouvettes normalisées.
7

2.1.1 Courbe rationnelle déformation-contrainte
Considérons une barre de section circulaire constante S0 = πd20/4 que l’on soumet à un
effort (force, en Newton) F dans sa direction longitudinale. Si on note L0 la longueur initiale
L0
L
−→F−
−→F
φ d φ d0
O −→x
−→y
Figure 5 – Traction uniaxiale et allongement unitaire.
et L la longueur déformée, la différence de longueur s’écrit ∆L = L−L0. En normalisant lavariation de longueur par rapport à la longueur initiale, on obtient l’allongement unitaireselon la direction longitudinale
ε =∆L
L0
(1)
aussi appelé déformation longitudinale. On notera que la déformation est un allongementrelatif et donc sans unité. L’équilibre statique de cette poutre cylindrique est associé auseul effort normal
−→F = N−→x . Dans toute section de l’éprouvette de normale −→x , on peut
en déduire la contrainte longitudinale
σ =N
S(2)
où S = π d2/4 est la section courante de la barre. La contrainte s’exprime en Newton parunité de surface (N·m−2) aussi appelé le Pascal, noté Pa.
Le dépouillement des essais detraction consiste à transformer lescourbes force-déplacement obtenuesen courbes rationnelles donnant lacontrainte σ (homogène à une pres-sion) en fonction de la déformationε (sans unité). La figure 6 donne unecourbe rationnelle typique obtenuepour différents types de matériaux.
ε
σ (Pa)
polymère
métal mou et ductile
métal dur et fragilecéramique
composite
Figure 6 – Courbes rationnelles typiques.
8

C
Rupture
ε =∆L
L0
σ =F
S0
B
O
A
Figure 7 – Courbe rationnelle de traction.
Dans le cas d’un matériau ductile, on obtient une courbe de traction semblable à cellede la figure 7. Sur cette courbe, on peut identifier trois zones :
1. entre O et A : zone de déformation élastique (réversible) ;2. entre A et B : zone de déformation plastique (irréversible) sans endommagement ;3. entre B et C : zone de déformation plastique (irréversible) avec endommagement ;
avant la rupture au point C.
2.1.2 Zone de déformation élastique (réversible)
La zone de déformation élastique est caractérisée par un comportement réversible,c’est-à-dire que l’éprouvette reprend ses dimensions initiales lorsqu’elle est déchargée(figure 8). Cette zone élastique est délimitée par deux valeurs caractéristiques :
— Re ou Re 0,2% : limite élastique, limite élastique à 0,2 % ;— εe : déformation à la limite élastique.
Loi de Hooke et module de Young Si la relation σ = f (ε) est linéaire (comme c’estle cas pour la quasi-totalité des métaux) alors la contrainte et la déformation longitudinaleévoluent proportionnellement. Cette relation de proportionnalité est appelée la loi deHooke et s’écrit
σ = E ε (3)
où E est le module d’élasticité longitudinal ou module de Young 2. C’est un coefficient quidépend du matériau et peut être déterminé à l’aide d’un essai de traction.
2. Le module de Young ou module d’élasticité longitudinal porte le nom de son découvreur ThomasYoung (13 juin 1773—10 mai 1829, physicien, médecin et égyptologue britannique). Il a remarqué quele rapport entre la contrainte de traction appliquée à un matériau et la déformation qui en résulte estconstant, tant que cette déformation reste petite.
9

C
ε
σ B
O
ARe
εe
Figure 8 – Zone de déformation élastique.
Coefficient de Poisson On notera qu’intuitivement et comme indiqué sur la figure 5,l’allongement de l’éprouvette s’accompagne d’un rétrécissement dans les directions perpen-diculaires à celles de l’allongement. Ainsi, dans notre exemple, on observe une diminutiondu diamètre de ∆d = d − d0. Cette contraction est proportionnelle à l’effort appliqué tantque la limite élastique n’est pas dépassée. La variation relative de diamètre correspond àla déformation transverse εr, définie par
εr =∆d
d0
(4)
Le rapport entre la déformation longitudinale εl et la déformation transverse εr est unecaractéristique matériau et s’appelle le coefficient de Poisson
ν =−εr
εl
(5)
Ce coefficient est un nombre sans unité qui doit être compris entre −1 et 0, 5 pour unequestion de stabilité. Si ν < 0, comme c’est le cas pour certaines mousses, on observeraune augmentation du diamètre de la barre lorsqu’elle est étirée. On qualifie les matériauxà coefficient de Poisson négatif d’auxétiques. On retiendra simplement que les métaux ontgénéralement un coefficient de Poisson compris entre 0, 2 et 0, 3.
2.1.3 Zone de déformation plastique (irréversible)
La zone de déformation plastique est caractérisée par un comportement irréversible :c’est-à-dire que l’éprouvette ne reprend ses dimensions initiales lorsqu’elle est déchargéemais aura des dimensions et propriétés modifiées (figure 9). En effet, si on relâche l’éprou-vette après l’avoir soumise à une contrainte supérieure à sa limite élastique, alors, aprèsun retour élastique de pente E, son état relâché sera caractérisé par une déformationpermanente ou plastique notée εp.
10

C
ε
σ B
O
A
E
Re
εp εe
Nouvelle limite élastique
Figure 9 – Zone de déformation plastique.
Écrouissage Si à partir de ce nouvel état relâché l’éprouvette est rechargée alors sazone de comportement élastique sera définie par une nouvelle limite élastique, plus élevéeque Re et une nouvelle valeur de déformation à la limite élastique, elle aussi supérieure àεe (figure 10). On parle d’écrouissage (durcissement) du matériau que l’on peut traduireschématiquement par :
Écrouissage : εe ր et σe ր
C
ε
σ B
E
Re
εe
Nouvelle limite élastique
Figure 10 – Principe de l’écrouissage.
11

Résistance minimale à la traction La contrainte maximale à laquelle peut êtresoumise l’éprouvette est appelée la résistance mécanique à la traction, notée Rm.
C
ε
σ B
O
A
E
Re
A%
Rm
Ru
Rupture
Figure 11 – Caractéristiques plastiques.
Striction Si on impose un déplacement à l’éprouvette au-delà du point B, alors elleva s’endommager de façon irrémédiable avec la diminution brutale d’une de ses sectionsjusqu’à la rupture au point C. Cette phase d’endommagement, caractérisée par une baissede sa limite élastique et de la déformation à la limite élastique est appelée la striction(figure 11).
Rupture Au moment de la rupture en C (dernier point enregistré), on définit :— la résistance ultime Ru comme la contrainte à la rupture ;— l’allongement pour cent A% comme la déformation plastique après rupture.
i Ce qu’il faut retenir de l’essai de traction
Zone de déformation élastique (réversible)
— Limite du domaine par Re ou Re 0,2 (ε2 < 0, 2%)— Allure de la courbe : linéaire, hystérésis ?— Si linéaire, loi de Hooke σ = E ε
Zone de déformation plastique (irréversible)
1. Écrouissage (εe ր et σe ր) −→ Résistance maximale Rm
2. Striction (εe ց et σe ց)3. Rupture : Résistance à la rupture Ru et Allongement maximal A%
12

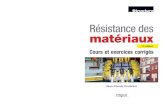
Figure 12 – Limites élastiques en fonction des allongements relatifs.
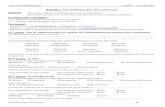
Figure 13 – Module de Young en fonction du coefficient de poisson.
13

Table 1 – Exemples de propriétés mécaniques issues d’essais de traction.Matériau Re (MPa) Rm (MPa) E (GPa) A (%)Diamant 50 000 – 1 000 0Alumine 5 000 – 390 0Acier 200–1200 300–1800 210 10–20Fontes 100–450 400–900 170 0,8–15Cuivre et alliages 60–500 150–650 120 3–30Aluminium et alliages 30–530 20-470 70 0,5–35Polystyrène 34-70 40-70 3 5–75Caoutchouc – 30 0,01–0,1 500
2.2 Essai de flexion
La flexion (figure 14) est l’essai le plus couramment employé sur les céramiques. Laflexion quatre points permet de solliciter le matériau avec un moment constant entre lesdeux points d’application de la charge. Comme en torsion, la déformation et la contraintene sont pas constantes dans l’épaisseur de l’éprouvette.
Figure 14 – Schématisation de l’essai de flexion quatre points.
2.3 Essai de torsion
L’essai de torsion (figure 15) permet d’avoir accès à une loi de comportement pour degrandes déformations, sans problème de frottement entre l’éprouvette et l’outil. Cependant,la déformation et la contrainte ne sont pas homogènes le long du rayon de l’éprouvette.On utilise donc parfois un cylindre à paroi mince comme éprouvette.
Figure 15 – Schématisation de l’essai de torsion.
14

2.4 Essai de résilience
L’essai de flexion par choc sur éprouvette entaillée Charpy a pour but de mesurer larésistance d’un matériau à la rupture brutale d’une éprouvette à l’aide d’un couteau afind’en déduire l’énergie absorbée. C’est cette énergie qui caractérise la résistance aux chocsdes matériaux appelée la ténacité. La machine qui permet de réaliser cet essai est appeléeMouton Charpy en l’honneur de l’ingénieur français Georges Charpy (1865-1945) qui enfut un des principaux théoriciens et promoteurs de cet essai (figure 16).
r=2 mm40 mm
S
Position de départ
Position d’arrivée
Éprouvette
Couteau
Figure 16 – Photo et principe du mouton de Charpy.
L’éprouvette est constituée d’un barreau entaillé par usinage en son milieu. La forme del’entaille la plus fréquente est la forme en V (type A dans la norme américaine ASTM)d’une profondeur de 2 mm. Il existe également une éprouvette avec une entaille en U (typeC dans la norme ASTM).
L’énergie absorbée est obtenue en comparant la différence d’énergie potentielle entre ledépart du pendule et la fin de l’essai. La machine est munie d’index permettant de connaîtrela hauteur du pendule au départ h0 ainsi que la position la plus haute que le penduleatteindra après la rupture de l’éprouvette h. L’énergie de résilience correspond alors à ladifférence d’énergie potentielle Mg (h − h0) où M est la masse du mouton-pendule. Larésilience K (ou Kc) est définie comme le quotient de l’énergie nécessaire pour romprel’éprouvette (en joule) par l’aire de la section rompue (en m2) :
K =Mg (h0 − h)
S
La résilience s’exprime en J·m−2 ou en daJ·cm−2. Suivant la forme de l’entaille, la résilienceest notée Ku (entaille en U) ou Kv (entaille en V). Pour les matériaux ductiles K estplutôt élevé (600 kJ·m−2 pour un acier haute résistance), pour les matériaux fragiles, Kest plutôt faible (0, 1 kJ·m−2 pour du verre).
L’essai de résilience permet de classer les matériaux selon qu’ils sont ductile ou fragile.
15

2.5 Essai de dureté
La dureté est l’aptitude d’un corps à résister à la pénétration d’un autre corps, ce quidonne des indications sur les possibilités d’usure du matériau. La dureté est généralementmesurée avec une des techniques d’indentation qui consistent à appliquer une charge,dans des conditions déterminées, à la surface du matériau, à l’aide d’un indenteur oupénétrateur. Après l’essai, le matériau s’étant déformé de façon permanente, on peutobserver une empreinte que l’on peut mesurer. Les conditions d’essai sont la géométrie del’indenteur, la force et la durée. Les principaux essais de dureté sont :
— l’essai de dureté Brinell (HB – bille) ;— l’essai de dureté Vickers (HV – pyramide) ;— l’essai de dureté Rockwell (HR – cône HRC ou bille HRB).
Table 2 – Exemples de duretés.Matériau HB HV HRCDiamant 10 000 – –Verre 450 500 50Bronze 140 90 –Plomb 5 50 –
2.6 Essai de fatigue
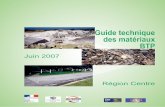
La fatigue d’une pièce peut entraîner sa rupture alors même que le matériau n’atteintjamais sa limite élastique. Un chargement pour un test de fatigue est caractérisé parune contrainte moyenne σm et une composante périodique (par exemple sinusoïdale). Onsoumet les éprouvettes à des niveaux d’amplitude croissants et on relève le nombre decycles avant rupture. Ces résultats sont analysés dans un diagramme de Wöhler (figure 19).
Figure 17 – Exemple de diagrammes de Wöhler.
Si la rupture a lieu en moins de 50 000 cycles, on parle de « fatigue oligocyclique ». Sielle a lieu à plus de 50 000 cycles, on parle de « fatigue normale ».
16

3 Propriétés physiques
Masse volumique En ingénierie on recherchesouvent à minimiser la masse des systèmes pourminimiser leur consommation d’énergie et maximiserleurs performances dynamiques. La masse volumiquedes matériaux, notée ρ, est donc un indicateurdéterminant du choix d’un matériau. La plupart desmétaux ont de fortes densités parce que leurs atomessont lourds et structurés de façon compacte. Aucontraire, les atomes constituants les matériaux poly-mères ou de nombreuses céramiques sont plus légers(C, H et O) et leurs structures sont moins compactes.
La masse volumique à 20°C de quelques matériauxest donnée dans la table ci-contre.
Matériau ρ (kg·dm−3)Caoutchouc 0, 9Nylon 1, 1PRFV 1, 4 − 2, 2Béton 2, 5Verre 2, 5Aluminium 2, 7Alumine (Al2O3) 3, 9Titane 4, 5Fonte 5, 9 − 7, 8Acier 7, 8Cuivre 8, 9Platine 21, 4
Coefficient de dilatation thermique Les propriétés thermiques des matériaux sontaussi importantes et dans la plupart des applications on recherche une certaine invariabilitédes dimensions des pièces pour les gammes de température d’utilisation. Hors, la plupartdes matériaux se dilate sous l’effet de la chaleur. On peut modéliser cette dilatation autourde 20° avec un modèle linéaire
ε = α∆T, ε =∆ℓ
ℓ
permettant de déterminer la déformation ε (sans unité)induite par une variation de température ∆T (en °C) parl’intermédiaire d’un coefficient de dilatation thermique α.
Le coefficient de dilatation thermique à 20°C de quelquesmatériaux est donné dans la table ci-contre.
Matériau α (10−6/°C)Caoutchouc 600PTFE 100Aluminium 24Cuivre 17Acier 12Fonte 10 − 18Verre 8, 5Diamant 1, 2
Température de fusion La températurede fusion est à prendre en compte lorsqueles températures d’utilisation sont élevées(problèmes de fluage), lorsqu’on veut mettre enforme à chaud (forgeage) ou pour la réalisationde traitements thermiques.
La température de fusion de quelques matériauxest donnée dans la table ci-contre.
Matériau Tf (°C)Carbure de silicium (SiC) 3100Alumine (Al2O3) 2300Acier 1500Fonte 1400Cuivre 1300Verre 1000Aluminium 600PTFE 327
17

Table 3 – Ordres de grandeur des propriétés physiques à 20°C.Matériau ρ (kg·dm−3) Tf (°C) α (10−6/°C)
Acier 7,8 – 7,85 1510 10 – 14Alliage d’Al 2,8 650 22
Bronze 8,85 – 9,3 900 17,4 – 18,8Fonte 6,8 – 7,8 1100 – 1300 5 – 15Laiton 8,3 – 8,9 920 18 – 21Nylon 1,14 220 7Téflon 2,2 300 18
ρ : masse volumique – Tf : température de fusion – α : coefficient de dilatation thermique
4 Matériaux métalliques
Parmi les matériaux utilisés en ingénierie, on distingue généralement les matériauxmétalliques (métaux) et les matériaux non métalliques. Parmi les matériaux métalliques,on distingue les métaux ferreux (aciers et fontes) et les métaux non ferreux (alliages decuivre, d’aluminium, de magnésium, de titane, etc.). Les quatre plus grandes classes sontles aciers, les fontes, les alliages d’aluminium et les alliages de cuivre.
4.1 Aciers
Un acier est un alliage contenant du fer (Fe) et moins de 1,8 % de carbone (C), etéventuellement d’autres éléments d’addition. Selon la proportion des éléments d’addition(autres que le fer et le carbone), un acier est dit allié ou non.
4.1.1 Aciers non alliés
Un acier contenant moins de 1 % d’éléments d’addition est dit non allié. Les aciers nonalliés les plus utilisés en construction mécanique sont les séries S et E. Leur désignationsymbolique est :
G
G si moulé, rien sinon
S
S : usage général / E : construction mécanique
355
Limite élastique Re (MPa)
Les aciers non alliés se présente le plus souvent sous forme de produits laminés (tôles,barres, profilés, etc.). Leur mise en forme est aisée et peut se faire avec les procédésclassiques de formage à froid ou à chaud, d’emboutissage, de pliage, de soudage, etc. Onretrouve ces matériaux dans les structures de machines et mécanismes, les carrosseries etcarters rigides, les profilés du bâtiment, la construction navale, etc. Ces matériaux ne sontpas destinés à recevoir des traitements thermiques.
Les aciers non alliés destinés à recevoir des traitements thermiques (trempe, revenu,etc.) sont les aciers spéciaux de la série C. Leur désignation symbolique est :
18

G si moulé, rien sinonC
aciers spéciaux
35
% de carbone multiplié par 100
Parmi ces aciers non alliés spéciaux, souvent dits « au carbone », on distingue généralement :
— les aciers doux, contenant moins de 0, 3 % de carbone, habituellement cémentés outraités en surface, parfois trempés ;
— les aciers mi-durs, contenant entre 0, 3 et 0, 5 % de carbone, utilisés pour les arbresou les engrenages après trempe suivie d’un revenu ;
— les aciers durs, contenant plus de 0, 5 % de carbone, utilisés pour les ressorts,matrices de moule ou de presses ou des pièces forgées après avoir subies un ouplusieurs traitement thermiques permettant d’obtenir une grande dureté et unebonne résistance à l’usure.
Table 4 – Exemples d’aciers non alliés.Nuance Re (MPa) Rm (MPa) A (%) K (daJ·cm−2)S 235 235 340 15 – 26 6E 360 360 670 3 – 11 5C 50 395 – 600 700 – 980 12 – 17 –
4.1.2 Aciers faiblement alliés
Un acier contenant plus de 1 % d’éléments d’addition mais dont aucune teneur d’élé-ments d’addition ne dépasse 5 % est dit faiblement allié. Ces aciers sont généralementchoisis pour leur haute résistance (HR), avec ou sans traitement thermique. Ils sont utiliséspour les pièces de transmission de puissance comme les engrenages ou les arbres. Leurdésignation symbolique est :
G si moulé, rien sinon35
% de carbone × 100
Ni Cr Mo
principaux éléments d’addition(dans l’ordre de leur teneur)
16
teneur en % des élémentsd’addition (cf. table 5)
La teneur d’un élément d’addition n’est indiquée que si elle est supérieure à 1 %. Dans cecas, la lecture se fait en incluant un coefficient multiplicateur (table 5).
Table 5 – Coefficients multiplicateurs de la teneur en % des éléments d’addition.×4 Cr, Co, Mn, Ni, Si, W×10 Al, Be, Cu, Mo, Nb, Pb, Ta, Ti, V, Zr×100 Ce, N, P, S×1000 B
Voir la table 10 pour les désignations.
19

Exemple 4.1 (35 Ni Cr Mo 16)Le 35 Ni Cr Mo 16 contient 0, 35 % de carbone, 16/4 = 4 % de nickel (Ni) et des traces(teneur non indiquée donc inférieure à 1 %) de chrome (Cr) et de molybdène (Mo).
Exemple 4.2 (100 Cr 6)Le 100 Cr 6 contient 1 % de carbone, 6/4 = 1, 5 % de chrome (Cr).
Table 6 – Exemples d’aciers faiblement alliés.Nuance Re (MPa) Rm (MPa) A (%) K (daJ·cm−2)100 Cr 6 550-850 850-1250 10–13 442 Cr Mo 4 500 – 850 700 – 1200 11 – 15 635 Ni Cr Mo 16 800–1250 1000-1750 9–11 5
4.1.3 Aciers fortement alliés
Un acier contenant plus de 1 % d’éléments d’addition dont la teneur d’au moins unélément d’addition excède 5 % est dit fortement allié. Les aciers fortement alliés sontchoisis pour certaines caractéristiques particulières comme la résistance à la corrosion oula tenue en température. Ils sont utilisés pour des applications marines, des outils ou despièces de sécurité. Leur désignation symbolique est :
G si moulé, rien sinonX
acier fortement allié6
% de carbone × 100
Cr Ni Ti
principaux éléments d’addition(dans l’ordre de leur teneur)
18–11
teneur en % des élémentsd’addition (cf. table 5)
Exemple 4.3 (X 6 Cr Ni Ti 18–11)Le X 6 Cr Ni Ti 18–11 est un acier fortement allié (préfixe X) qui contient 0, 06 % decarbone, 18 % de chrome (Cr), 11 % de nickel (Ni) et des traces (teneur non indiquéedonc inférieure à 1 %) de titane (Ti).
Remarque 4.1 (Acier inoxydable)Lorsqu’un acier fortement allié contient plus de 12 % de chrome (Cr), il est dit inoxydable.
4.1.4 Aciers rapides
Les aciers rapides possèdent une haute résistance en température ainsi qu’à l’usure.Ils sont principalement utilisés pour réaliser des outils de coupe pour les procédés defabrication par enlèvement de matière. Leur désignation symbolique est :
20

HS
Acier rapide
6–5–2–5Teneur en % des élémentsd’addition W, Mo, V et Co
Pour améliorer les conditions de coupe (vitesse et profondeur de passe), l’état de surfaceet la durée de vie des outils, les aciers rapides peuvent être revêtus de TiN et TiCN .
4.2 Fontes
Une fonte est un alliage contenant du fer (Fe) et entre 2 et 4 % de carbone (C), etéventuellement d’autres éléments d’addition. Les fontes peuvent éventuellement comprendredes éléments d’addition (autres que le fer et le carbone). Leur désignation symbolique est :
GJS
Type de fonte :GJL, GJS, GJMW, GJMB
–EN
Préfixe
400
Résistance à la rupture Rm (MPa)
– 15
Allongement A %
On distingue quatre familles de fontes :
— les fontes à graphite lamellaire (GJL), aussi appelées « fontes grises » en raison deleur couleur. Elles sont utilisées pour réaliser des carters, des bâtis de machines outilsou, plus généralement, toute pièce volumineuse obtenue par moulage puis usinage ;
— les fontes à graphite sphéroïdal (GJS) sont plus résistantes que les précédentes etpeuvent être utiliser pour réaliser des pièces de transmission de puissance (arbre,vilebrequin) par moulage puis usinage.
— les fontes malléables à cœur blanc (GJMW) ou noir (GJMB) sont adaptées auxmoulages de pièces de faibles épaisseurs ;
— les fontes alliées, qui peuvent contenir, comme les aciers, des éléments d’addition detype nickel (Ni), cuivre (Cu) ou aluminium (Al), etc. leur permettant d’obtenir despropriétés spécifiques recherchées.
Figure 18 – Fonte à graphite lamellaire. Figure 19 – Fonte à graphite sphéroïdal.
21

Table 7 – Exemples de fontes.Nuance Re (MPa) Rm (MPa) A (%)EN-GJS 350 260 350 0, 8EN-GJS 99 - 2 600 900 2EN-GJMW 400 - 5 220 400 5EN-GJMB 600 - 3 430 600 3
4.3 Alliages d’aluminium
L’aluminium est ductile et malléable qui peut être mis en forme facilement avec lesprocédés classiques. Il résiste assez bien à la corrosion et est près de trois fois moins denseque l’acier. À l’état de brut, on le trouve en produits corroyés (laminés, forgés ou filés) ouen produit pour la fonderie. Leur désignation numérique est :
AWAB : produits coulés en lingotAC : produits moulés
AW : produits corroyés
EN
Préfixe
– 5
Famille :
1 : aluminium pur 5 : Al + Mg2 : Al + Cu 6 : Al + Mg + Si3 : Al + Mn 7 : Al + Z4 : Al + Si 8 : Al + autres
0
Si Al pur : indice de puretéSi alliage : nb de modificationsapportées à l’alliage d’origine
52
Teneur en Al au-delà de99 % ×100
On distingue deux familles de produits :
— l’aluminium et ses alliages corroyés, que l’on trouve sous forme de barres ou deprofilés, utilisés dans des applications très variées, de l’aéronautique au bâtiment ;
— l’aluminium et ses alliages pour la fonderie, particulièrement faciles à mouler du faitd’une température de fusion beaucoup plus faible que celles des aciers ou des fontes.
Table 8 – Exemples d’alliages d’aluminium.Nuance Re (MPa) Rm (MPa) A (%) Composition
Cor
royé
s EN AW – 1070 105 125 2 Al 99, 7EN AW – 2017 220 140 13 Al Cu 4 Mg Si (duralumin)EN AW – 3003 35 100–130 24 Al Mn CuEN AW – 6001 85 150 19 Al Mg 1 Si Cu
Mou
lés EN AC – 44 200 70 160 4 Al Si 12 (alpax)
EN AC – 21 000 120–190 160–220 0, 5–1, 5 Al Cu 4 Mg TiEN AC – 51 300 – 220 1, 5 Al Mg 5
22

On notera avant de poursuivre qu’il est possible d’améliorer la résistance à la corrosiondes alliages d’aluminium avec un traitement électrochimique de surface appelé anodisation.
4.4 Alliages de cuivre
Les alliages de cuivre possèdent de bonnes conductivités électrique et thermique etune bonne résistance à la corrosion. Pour ces caractéristiques, il est utilisé pur pour lesapplications électriques, de chaudronnerie ou en tuyauterie. Les alliages du cuivre sontprincipalement :
— les laitons : Cu + ZnUtilisation : pièces usinées, visserie, pièces matricées, robinetterie, etc.
— les bronzes : Cu + SnUtilisation : robinetterie, engrenages, paliers lisses, etc.
— les cupro-aluminiums : Cu + AlUtilisation : construction marine, paliers lisses, arbres, etc.
— les cupro-nickels : Cu + NiUtilisation : coquilles pour moulage, pièces de monnaie, etc.
— maillechorts : Cu + Ni + ZnUtilisation : pièces bon marché, articles ménagers, etc.
Leur désignation numérique est :
C
Procédé :B : coulé en lingotC : mouléM : alliage mèreW : corroyé
CPréfixe 483K
Type d’alliage
Table 9 – Exemples d’alliages de cuivre.Nuance Re (MPa) Rm (MPa) A (%) CompositionCW 612N 200–250 500-600 – Cu Zn 39 Pb 2CC 483K 130 240 5 Cu Sn 12CC 333G 128–250 500–650 13 Cu Al 10 Fe 5 Ni 5CW 401J – 420 27 Cu Ni 10 Zn 27
Remarque 4.2 (Désignation des métaux et alliages non ferreux)Les métaux non ferreux purs sont généralement désignés par leur symbole chimiquesuivi d’un indice de pureté. Dans le cas des alliages, le symbole du métal de base estsuivi des symboles des éléments d’addition, respectivement suivis des pourcentagesdes teneurs de ces éléments. Par exemple le Mg Al6 Zn3 est un alliage de magnésiumcontenant 6 % l’aluminium et 3 % de zinc.
23

Mémo
Propriétés mécaniques fondamentales
Matériau E (GPa) ν (-) Re (MPa) ρ (kg·m−3)Aciers HR 200 – 220 0,27 – 0,3 800 – 2000 7800Aciers inox 180 – 190 0,27 – 0,3 300 – 1200 7800Alliage d’Al 70 – 75 0,33 250 – 500 2780Titane 110 0,33 550 – 1000 4500
Expression des critères mécaniques de choix des matériaux
Condition fonctionnelle Traduction physique CritèreÊtre léger Masse volumique ρ faible ρ−1
Être rigide Module de Young élevé E
Être rigide et léger –E
ρRésister aux efforts Résistance élastique élevée Re
Résister aux chocs Ductilité élevée K
Table 10 – Symboles chimiques des corps simples.Élément Symbole
Aluminium AlAntimoine SbBérylium BeBismuth Bi
Bore BCadmium CdChrome CrCobalt CoCuivre Cu
Élément SymboleÉtain SnFer Fe
Lithium LiMagnésium MgManganèse MnMolybdène Mo
Nickel NiNiobium Nb
Phosphore P
Élément SymbolePlomb Pb
Sélénium SeSilicium SiSoufre STantale TaTitane Ti
Tungstène WVanadium V
Zinc ZnZirconium Zr
* **
24