Material Controles
53
IEM-453 CONTENIDO I. INTRODUCCION RESEÑA HISTORICA CONCEPTOS BASICOS o SISTEMAS DE CONTROL o CLASIFICACION DE LOS SISTEMAS DE CONTROL o SERVOMECANISMO o INGENIERIA DE LOS SISTEMAS DE CONTROL o MODELOS MATEMATICOS II. DIAGRAMA DE BLOQUES Y FLUJOGRAMAS DIAGRAMA DE BLOQUES o Tipos de diagrama de bloques y sus elementos o ELEMENTOS DE UN DIAGRAMA DE BLOQUE o PROCEDIMIENTO PARA DIBUJAR UN DIAGRAMA DE BLOQUES o ALGEBRA DE LOS DIAGRAMAS DE BLOQUES o EJEMPLO FLUJOGRAMAS o DEFINICION o EQUIVALENCIA ENTRE UN DIAGRAMA DE BLOQUES Y UN FLUJOGRAMA o ELEMENTOS DE UN FLUJOGRAMA o REGLA DE MASON o EJEMPLO III. ESTABILIDAD DE SISTEMAS DE CONTROL DEFINICION CRITERIO DE ESTABILIDAD o ESTABILIDAD ABSOLUTA o ESTABILIDAD RELATIVA EJEMPLO IV. ERROR DE REGIMEN PERMANENTE CONCEPTO DE ERROR ERROR DE REGIMEN PERMANENTE ENTRADA ESCALON ENTRADA RAMPA ENTRADA PARABOLICA TIPOS DE SISTEMAS o TIPO CERO (0) o TIPO UNO (1) o TIPO DOS (2) TABLA DE ERRORES EJERCICIOS V. RESPUESTA DE FRECUENCIA DEFINICION CARACTERISTICA DE REPUESTA A LA FRECUENCIA o DIAGRAMA DE BODE o DIAGRAMA DE NYQUIST ANALISIS DE LA GRAFICA DE BODE CONSTRUCCION DE LA GRAFICA DE BODE o EJEMPLO 1 o EJEMPLO 2 INICIO
-
Upload
lorenzo-adriano -
Category
Documents
-
view
28 -
download
0
description
materiales de controles de servomecanismo
Transcript of Material Controles
IEM-453
CONTENIDO
I. INTRODUCCION
RESEÑA HISTORICA
CONCEPTOS BASICOS
o SISTEMAS DE CONTROL
o CLASIFICACION DE LOS SISTEMAS DE CONTROL
o SERVOMECANISMO
o INGENIERIA DE LOS SISTEMAS DE CONTROL
o MODELOS MATEMATICOS
II. DIAGRAMA DE BLOQUES Y FLUJOGRAMAS
DIAGRAMA DE BLOQUES
o Tipos de diagrama de bloques y sus elementos
o ELEMENTOS DE UN DIAGRAMA DE BLOQUE
o PROCEDIMIENTO PARA DIBUJAR UN DIAGRAMA DE BLOQUES
o ALGEBRA DE LOS DIAGRAMAS DE BLOQUES
o EJEMPLO
FLUJOGRAMAS
o DEFINICION
o EQUIVALENCIA ENTRE UN DIAGRAMA DE BLOQUES Y UN
FLUJOGRAMA
o ELEMENTOS DE UN FLUJOGRAMA
o REGLA DE MASON
o EJEMPLO
III. ESTABILIDAD DE SISTEMAS DE CONTROL
DEFINICION
CRITERIO DE ESTABILIDAD
o ESTABILIDAD ABSOLUTA
o ESTABILIDAD RELATIVA
EJEMPLO
IV. ERROR DE REGIMEN PERMANENTE
CONCEPTO DE ERROR
ERROR DE REGIMEN PERMANENTE
ENTRADA ESCALON
ENTRADA RAMPA
ENTRADA PARABOLICA
TIPOS DE SISTEMAS
o TIPO CERO (0)
o TIPO UNO (1)
o TIPO DOS (2)
TABLA DE ERRORES
EJERCICIOS
V. RESPUESTA DE FRECUENCIA
DEFINICION
CARACTERISTICA DE REPUESTA A LA FRECUENCIA
o DIAGRAMA DE BODE
o DIAGRAMA DE NYQUIST
ANALISIS DE LA GRAFICA DE BODE
CONSTRUCCION DE LA GRAFICA DE BODE
o EJEMPLO 1
o EJEMPLO 2
INICIO
INTRODUCCION A LOS SISTEMAS DE CONTROL
RESEÑA HISTORICA.
El control automático ha desempeñado una función vital en el avance
de la ingeniería y la ciencia. Además de su extrema importancia en los
sistemas de vehículos espaciales, de guiado de misiles. Robóticas y
similares, el control automático se ha vuelto una parte importante e integral
de los procesos modernos industriales y de manufactura. Por ejemplo, el
control automático es esencial en el control numérico de las maquina-
herramientas de la industria de manufactura, en el diseño de pilotos
automáticos en las industrias aeroespaciales, y en el diseño de automóviles
y camiones en la industria automotriz.
El primer trabajo significativo en control automático fue el regulador de
velocidad centrifugo de James Watt para el control de velocidad de un
maquina de vapor. En el siglo XVIII. Otros grandes aportes en etapa inicial
de la teoría de control fueron realizados por otros grandes científicos como:
En 1922 Minorsky trabajo en los controles automáticos para dirigir
embarcaciones y mostró que la estabilidad puede determinarse apartir de
las ecuaciones diferenciales que describen el sistema. También en 1932,
Nyquist diseño un procedimiento relativamente simple para determinar la
estabilidad en sistema de control de lazo cerrado con base en la respuesta
en lazo abierto en estado estable cuando la entrada aplicada es una
sinusoidal. Otro gran aporte fue hecho por Hanzen quien en 1934 introdujo
el término de servomecanismo para los sistemas de control de posición. En
los últimos años se han hechos grandes aportes a los sistemas de control
con el uso del computador en los análisis de ecuaciones arrojando
resultados con mayor presicion.
CONCEPTOS BASICOS.
SISTEMAS DE CONTROL.
Un sistema de control no es mas que un conjunto de componentes
físicos conectados de tal manera que el conjunto se pueda comandar, dirigir
o regular a si mismo o ha otro sistema.
LOS SISTEMAS DE CONTROL SE CLASIFICAN EN:
Sistema de control de ciclo abierto o sin realimentación.
Sistema de control de ciclo cerrado o con realimentación.
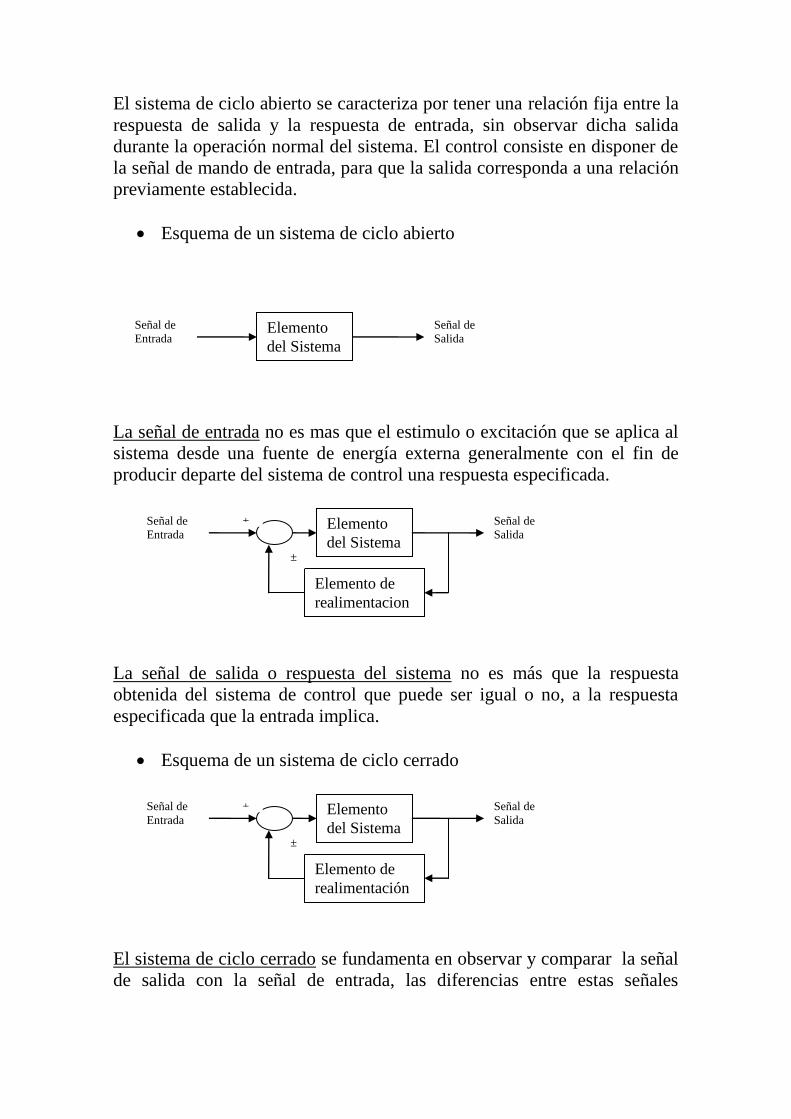
El sistema de ciclo abierto se caracteriza por tener una relación fija entre la
respuesta de salida y la respuesta de entrada, sin observar dicha salida
durante la operación normal del sistema. El control consiste en disponer de
la señal de mando de entrada, para que la salida corresponda a una relación
previamente establecida.
Esquema de un sistema de ciclo abierto
La señal de entrada no es mas que el estimulo o excitación que se aplica al
sistema desde una fuente de energía externa generalmente con el fin de
producir departe del sistema de control una respuesta especificada.
La señal de salida o respuesta del sistema no es más que la respuesta
obtenida del sistema de control que puede ser igual o no, a la respuesta
especificada que la entrada implica.
Esquema de un sistema de ciclo cerrado
El sistema de ciclo cerrado se fundamenta en observar y comparar la señal
de salida con la señal de entrada, las diferencias entre estas señales
Elemento
del Sistema
Elemento de
realimentación
Señal de
Salida
Señal de
Entrada
+
±
Elemento
del Sistema
Señal de
Salida
Señal de
Entrada
Elemento
del Sistema
Elemento de
realimentacion
Señal de
Salida
Señal de
Entrada
+
±
representan errores. El sistema de ciclo cerrado ajusta automáticamente la
señal de salida para minimizar los errores.
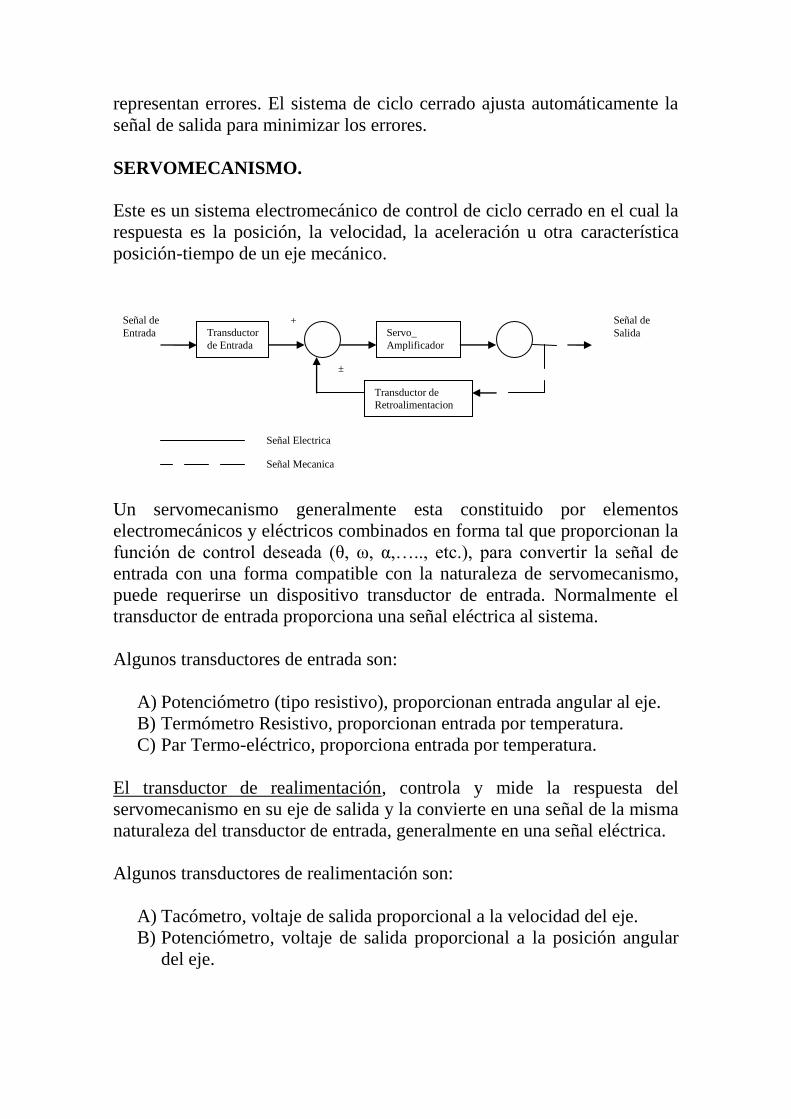
SERVOMECANISMO.
Este es un sistema electromecánico de control de ciclo cerrado en el cual la
respuesta es la posición, la velocidad, la aceleración u otra característica
posición-tiempo de un eje mecánico.
Un servomecanismo generalmente esta constituido por elementos
electromecánicos y eléctricos combinados en forma tal que proporcionan la
función de control deseada (θ, ω, α,….., etc.), para convertir la señal de
entrada con una forma compatible con la naturaleza de servomecanismo,
puede requerirse un dispositivo transductor de entrada. Normalmente el
transductor de entrada proporciona una señal eléctrica al sistema.
Algunos transductores de entrada son:
A) Potenciómetro (tipo resistivo), proporcionan entrada angular al eje.
B) Termómetro Resistivo, proporcionan entrada por temperatura.
C) Par Termo-eléctrico, proporciona entrada por temperatura.
El transductor de realimentación, controla y mide la respuesta del
servomecanismo en su eje de salida y la convierte en una señal de la misma
naturaleza del transductor de entrada, generalmente en una señal eléctrica.
Algunos transductores de realimentación son:
A) Tacómetro, voltaje de salida proporcional a la velocidad del eje.
B) Potenciómetro, voltaje de salida proporcional a la posición angular
del eje.
Transductor
de Entrada
Servo_
Amplificador
Señal de
Entrada
Señal de
Salida
Transductor de
Retroalimentacion
+
±
Señal Electrica
Señal Mecanica
El elemento de comparación o comparador, recibe una señal de la entrada y
del transductor de realimentación, las compara y proporciona una salida
relacionada con su diferencia. Esta salida es una medida de la falta de
correspondencia (señal de error) entre la señal de entrada y la salida. Las
señales que entran y salen al elemento comparador deben de ser
compatible.
INGENIERIA DE LOS SISTEMAS DE CONTROL.
La ingeniería de los sistemas de control consiste en el análisis y el diseño
de las configuraciones de los sistemas de control.
El análisis, es la investigación de las propiedades de un sistema existente, y
el diseño, es la elección y el ordenamiento de los componentes del sistema
para desempeñal una tarea especifica.
Existen dos métodos para el diseño:
1. Diseño por análisis, este se efectúa al modificar las características de
la configuración de un sistema existente o estándar.
2. Diseño por síntesis, el cual se efectúa al definir la forma del sistema
directamente de sus especificaciones.
Modelos o representaciones de sistemas de control.
Para resolver un problema de sistema de control, debemos especificar o
describir la configuración del sistema y sus componentes de una forma que
facilite el análisis o el diseño.
En el estudio de sistemas de control se usan extensamente tres
representaciones básicas (modelos) de los sistemas y sus componentes:
1. Modelos matemáticos en forma de ecuaciones diferenciales y/u otras
relaciones matemáticas como son transformada de Laplace y la
transformada Z.
2. Diagrama de Bloques.
3. Gráficos de flujo de señales.
Las características básicas de los sistemas de control son:
A) Estabilidad
B) Exactitud
C) Rapidez de respuesta
MODELOS MATEMATICOS.
SISTEMA LINEAL.
Un sistema es lineal cuando hay una relación de proporcionalidad entre la
variable de entrada y la variable de salida, por eso para decidir si un
sistema es lineal o no, es necesario construir la ecuación matemática que lo
describe. Entonces podemos afirmar que para que un sistema sea lineal
debe ser descrito por una ecuación lineal, es decir por una ecuación en
cuyos términos aparezcan las variables dependientes o sus derivada elevada
a la primera potencia además que no tengan productos, cocientes, ni
funciones trascendentes de dichas variables.
Un sistema de control ideal debe cumplir con las propiedades de
superposición y homogeneidad.
Si £[f(t) = F(s) → £[A f(t) = A F(s)
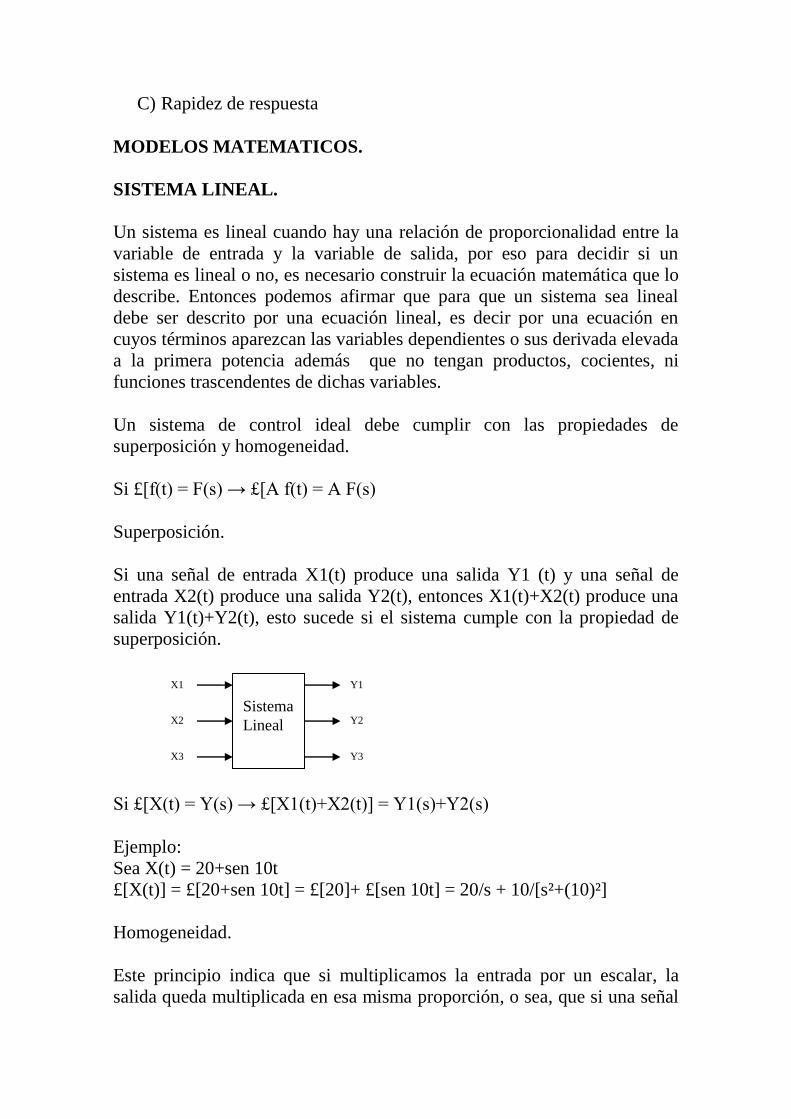
Superposición.
Si una señal de entrada X1(t) produce una salida Y1 (t) y una señal de
entrada X2(t) produce una salida Y2(t), entonces X1(t)+X2(t) produce una
salida Y1(t)+Y2(t), esto sucede si el sistema cumple con la propiedad de
superposición.
Si £[X(t) = Y(s) → £[X1(t)+X2(t)] = Y1(s)+Y2(s)
Ejemplo:
Sea X(t) = 20+sen 10t
£[X(t)] = £[20+sen 10t] = £[20]+ £[sen 10t] = 20/s + 10/[s²+(10)²]
Homogeneidad.
Este principio indica que si multiplicamos la entrada por un escalar, la
salida queda multiplicada en esa misma proporción, o sea, que si una señal
Sistema
Lineal
X1
X2
X3
Y1
Y2
Y3

de entrada X(t) produce una salida Y(t), entonces un señal de entrada kX(t)
me producirá una salida kY(t).
Si £[f(t)] = F(s) → £[k f(t)] = k F(s)
Ejemplo:
£[20sen 10t] = 20{10/[s²+(10)²]}
Linealidad = Superposición + Homogeneidad
Matemáticamente
n
i
tCiYitY1
)()( , siendo Ci → constante cualquiera.
El sistema línea o el comportamiento dinámico de un sistema lineal vienen
dado por una ecuación diferencial de la forma siguiente.
Yat
Ya
t
Ya
t
Yda
n
n
nn
n
n 011
1
1 ...... Xbt
Xb
t
Xb
t
Xdb
n
n
nn
n
n 011
1
1 ......
En donde:
X(t) → Señal de entrada, Y(t) → Señal de salida o respuesta del sistema
Si 01210121 ,,,......,,,,......, bbbbbaaaaa nnnn → son constante, esto es, que no
varían con el tiempo, entonces tendremos un sistema lineal invariable con
el tiempo.
Sistema
Lineal
CX1
CX2
CX3
CY1
CY2
CY3
Sistema
X(t) Y(t)
Sistema kX(t) kY(t)
Sistema X(t) Y(t)
Nota: Todos los sistemas de control preferiblemente deben de ser lineales,
cerrado, automático e invariable con el tiempo.
También existen sistemas lineales no homogéneos cuya ecuación
diferencial general se representa de la forma siguiente:
particularsoluc
p
ariacomplementsolucin
c
generalsoluc
YYY..
En ingeniería tendremos,
)](____[_
_
)__( tXentradaladedependepermanenteregimenderespuesta
rp
ceroatiendeiatransistor
respuestaT
sistemadelrespuesta
YYY
La respuesta transitoria depende de las raíces de las ec. Característica y de
ella depende que el sistema se estable o no.
Función de Transferencia.
Es la relación existente entre la transformada de Laplace de la salida y la
transformada de Laplace de la entrada con condiciones iniciales iguales a
cero.
)(
)(
)(
)(0_.
)}({
)}({)(
sD
sN
sX
sYinicialcond
tx
tysF
Donde N(s)=0 → ceros del sistema, D(s)=0 → polos del sistema y
Y(s) = F(s) * X(s).
Teorema del valor inicial.
Este teorema nos permite conocer las condiciones iniciales de un sistema.
Si £[f(t)] = F(s) → lim f(t) = lim s F(s)
t→ 0 s→ ∞
Ejemplo: Sea e2
100)(t
tf
Lim )100( e2t
= lim (100) + lim )(e)0(2
= 100 + 1 = 101
t→ 0 t→ 0 t→ 0
Sistema X(t) Y(t)

Aplicando transformada de Laplace tenemos:
)(2
200101
)2(
)2(100
)2(
1100][]100[)]([
2
2
e sFss
s
ss
ss
sstf
t
Aplicando el teorema, tenemos:
lim s F(s) = lim s ss
s
2
)200101(2
= lim
2
)200101(
s
s
s→∞ s→∞ s→∞
si aplicamos derivada arriba y debajo de la función, tenemos:
lim 2
)200101(
s
s=
1
101= 101
s→∞
Teorema del valor final.
Este teorema lo aplicamos cuando nesecitamos conocer las condiciones
finales del sistema.
Si £[f(t)] = F(s) → lim f(t) = lim s F(s)
t→ ∞ s→ 0
Ejemplo: Sea e2
100)(t
tf
, aplique el teorema del valor final.
UNIDAD II. DIAGRAMA DE BLOQUES Y FLUJOGRAMA.
DIAGRAMA DE BLOQUES.
Un sistema de control puede tener varios componentes. Para mostrar las
funciones que lleva a cabo cada componente en la ingeniería de control, por
lo general se usa una representación denominada Diagrama de Bloques,
que no es más que una representación grafica de las funciones que lleva a
cabo cada componente y el flujo de señales entre ellos. También dicho
diagrama muestra las relaciones existentes entre los diversos componentes.
A diferencia de una representación matemática puramente abstracta, un
diagrama de bloques tiene la ventaja de indicar en forma más realista el
flujo de señales del sistema real.
Tipos de diagrama de bloques y sus elementos.
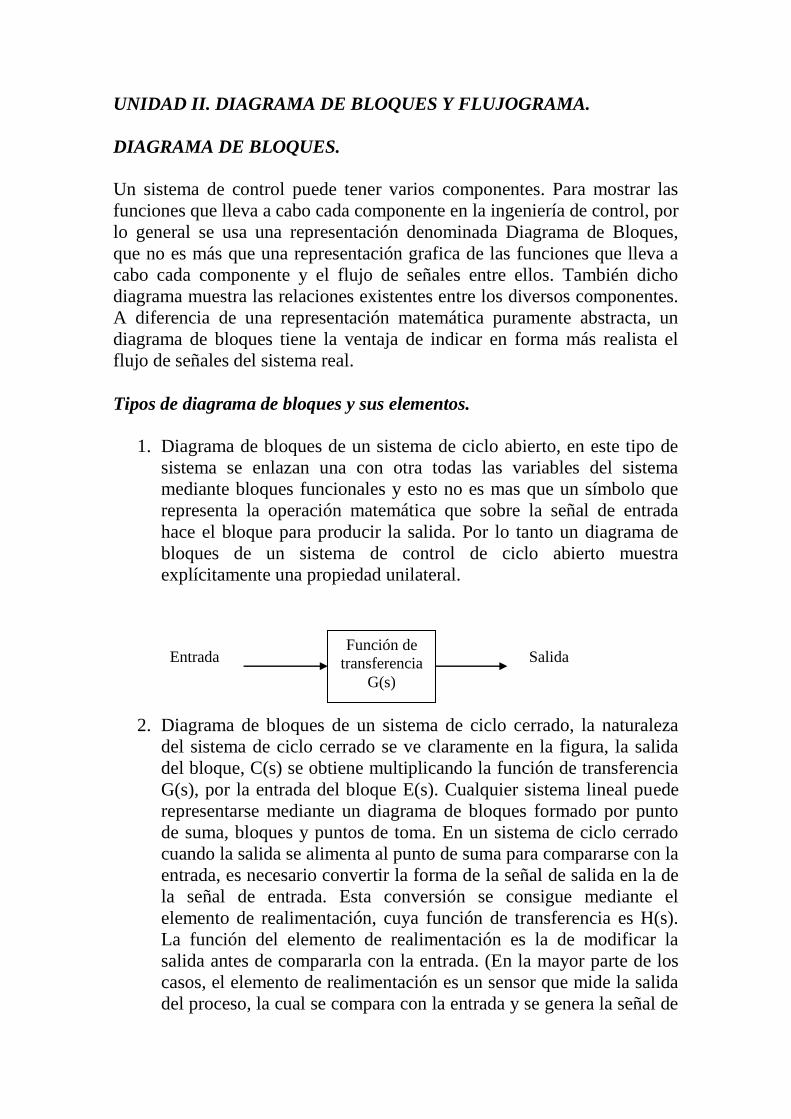
1. Diagrama de bloques de un sistema de ciclo abierto, en este tipo de
sistema se enlazan una con otra todas las variables del sistema
mediante bloques funcionales y esto no es mas que un símbolo que
representa la operación matemática que sobre la señal de entrada
hace el bloque para producir la salida. Por lo tanto un diagrama de
bloques de un sistema de control de ciclo abierto muestra
explícitamente una propiedad unilateral.
2. Diagrama de bloques de un sistema de ciclo cerrado, la naturaleza
del sistema de ciclo cerrado se ve claramente en la figura, la salida
del bloque, C(s) se obtiene multiplicando la función de transferencia
G(s), por la entrada del bloque E(s). Cualquier sistema lineal puede
representarse mediante un diagrama de bloques formado por punto
de suma, bloques y puntos de toma. En un sistema de ciclo cerrado
cuando la salida se alimenta al punto de suma para compararse con la
entrada, es necesario convertir la forma de la señal de salida en la de
la señal de entrada. Esta conversión se consigue mediante el
elemento de realimentación, cuya función de transferencia es H(s).
La función del elemento de realimentación es la de modificar la
salida antes de compararla con la entrada. (En la mayor parte de los
casos, el elemento de realimentación es un sensor que mide la salida
del proceso, la cual se compara con la entrada y se genera la señal de
Función de
transferencia
G(s)
Entrada Salida
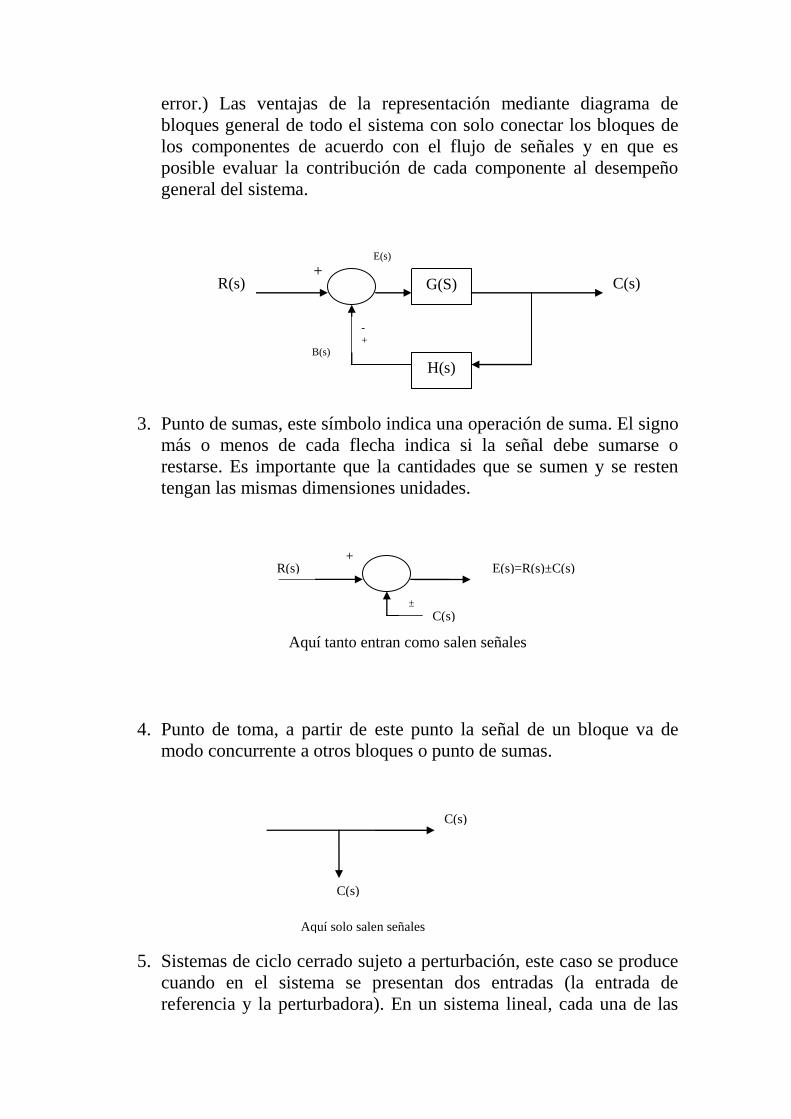
error.) Las ventajas de la representación mediante diagrama de
bloques general de todo el sistema con solo conectar los bloques de
los componentes de acuerdo con el flujo de señales y en que es
posible evaluar la contribución de cada componente al desempeño
general del sistema.
3. Punto de sumas, este símbolo indica una operación de suma. El signo
más o menos de cada flecha indica si la señal debe sumarse o
restarse. Es importante que la cantidades que se sumen y se resten
tengan las mismas dimensiones unidades.
4. Punto de toma, a partir de este punto la señal de un bloque va de
modo concurrente a otros bloques o punto de sumas.
5. Sistemas de ciclo cerrado sujeto a perturbación, este caso se produce
cuando en el sistema se presentan dos entradas (la entrada de
referencia y la perturbadora). En un sistema lineal, cada una de las
G(S)
H(s)
R(s) +
-
+ B(s)
E(s)
C(s)
R(s) E(s)=R(s)±C(s)
C(s)
+
±
Aquí tanto entran como salen señales
C(s)
C(s)
Aquí solo salen señales
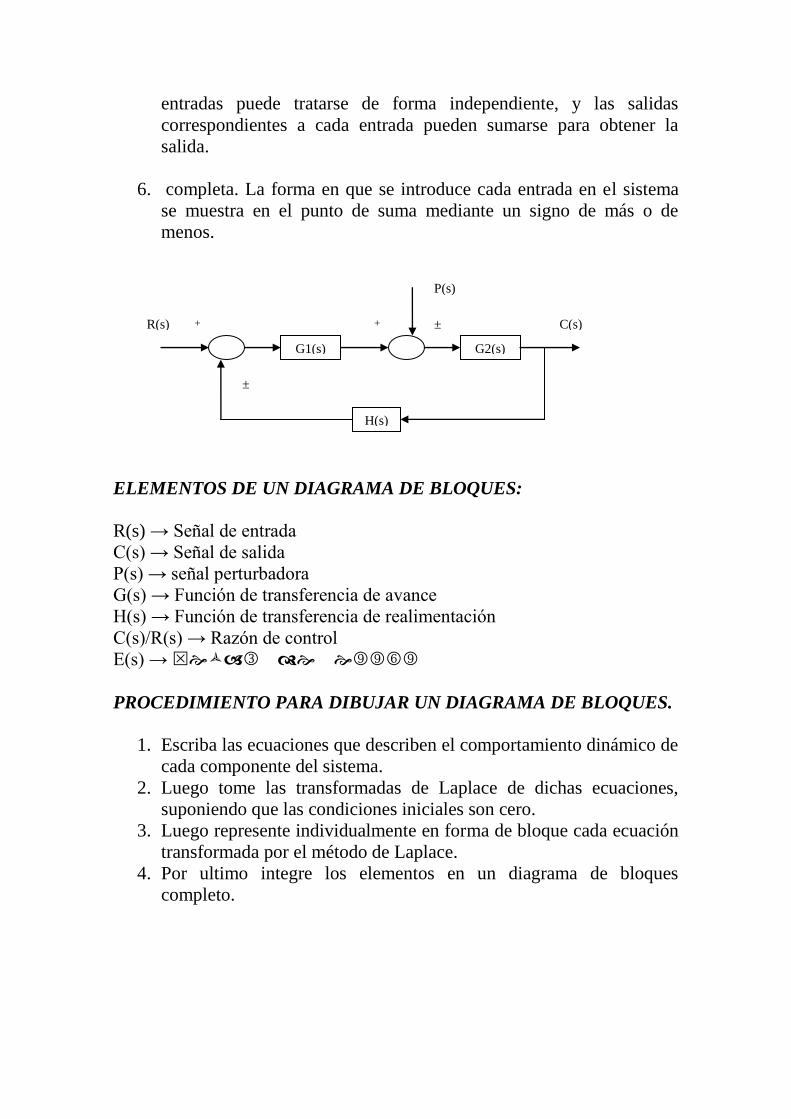
entradas puede tratarse de forma independiente, y las salidas
correspondientes a cada entrada pueden sumarse para obtener la
salida.
6. completa. La forma en que se introduce cada entrada en el sistema
se muestra en el punto de suma mediante un signo de más o de
menos.
ELEMENTOS DE UN DIAGRAMA DE BLOQUES:
R(s) → Señal de entrada
C(s) → Señal de salida
P(s) → señal perturbadora
G(s) → Función de transferencia de avance
H(s) → Función de transferencia de realimentación
C(s)/R(s) → Razón de control
E(s) →
PROCEDIMIENTO PARA DIBUJAR UN DIAGRAMA DE BLOQUES.
1. Escriba las ecuaciones que describen el comportamiento dinámico de
cada componente del sistema.
2. Luego tome las transformadas de Laplace de dichas ecuaciones,
suponiendo que las condiciones iniciales son cero.
3. Luego represente individualmente en forma de bloque cada ecuación
transformada por el método de Laplace.
4. Por ultimo integre los elementos en un diagrama de bloques
completo.
G1(s) G2(s)
H(s)
R(s) +
±
±
P(s)
C(s) +
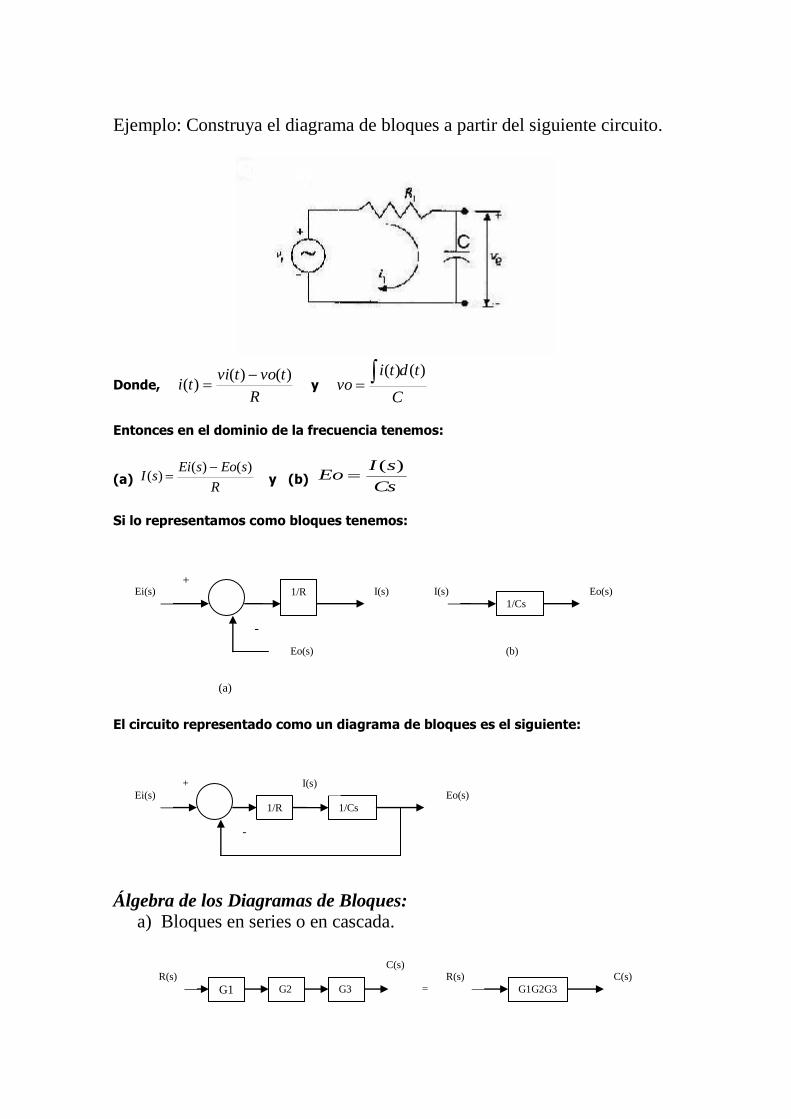
Ejemplo: Construya el diagrama de bloques a partir del siguiente circuito.
Donde, R
tvotviti
)()()(
y
C
tdtivo
)()(
Entonces en el dominio de la frecuencia tenemos:
(a) R
sEosEisI
)()()(
y (b)
Cs
sIEo
)(
Si lo representamos como bloques tenemos:
El circuito representado como un diagrama de bloques es el siguiente:
Álgebra de los Diagramas de Bloques:
a) Bloques en series o en cascada.
1/R +
-
Eo(s)
I(s) Ei(s)
(a)
1/Cs
I(s) Eo(s)
(b)
1/R 1/Cs
Eo(s) Ei(s) +
-
I(s)
G1 G2 G3
C(s) R(s)
= G1G2G3
C(s) R(s)
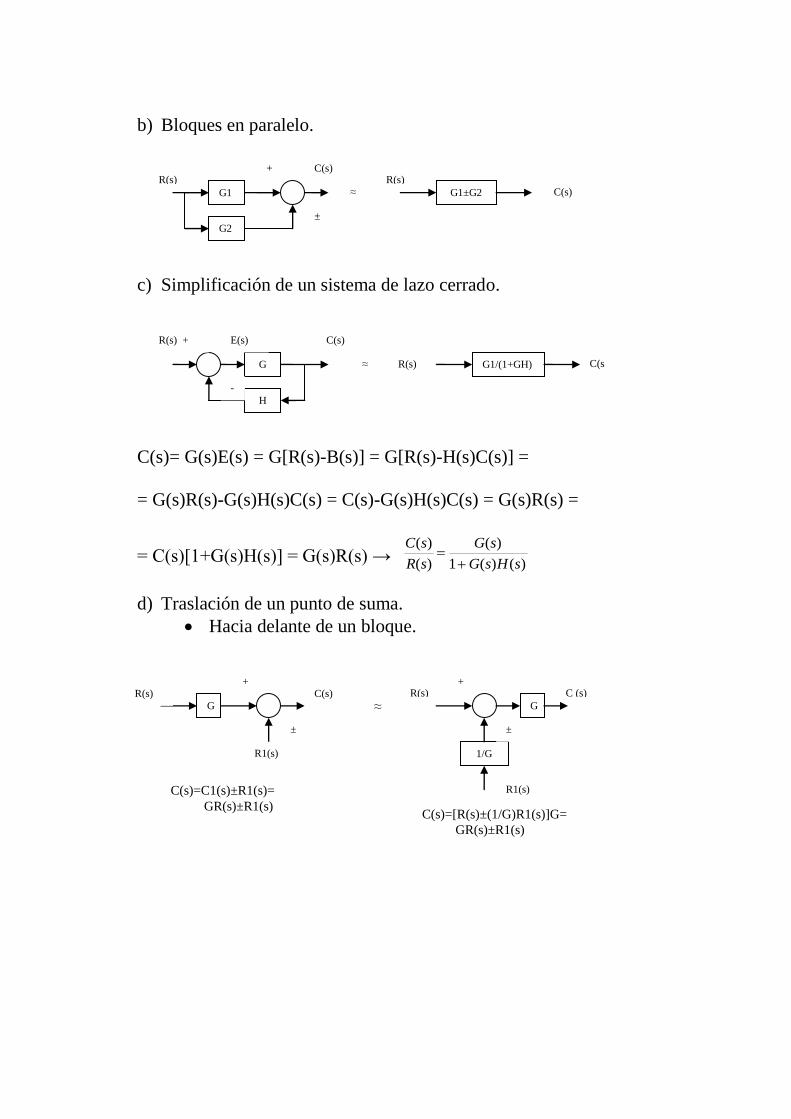
b) Bloques en paralelo.
c) Simplificación de un sistema de lazo cerrado.
C(s)= G(s)E(s) = G[R(s)-B(s)] = G[R(s)-H(s)C(s)] =
= G(s)R(s)-G(s)H(s)C(s) = C(s)-G(s)H(s)C(s) = G(s)R(s) =
= C(s)[1+G(s)H(s)] = G(s)R(s) → )()(1
)(
)(
)(
sHsG
sG
sR
sC
d) Traslación de un punto de suma.
Hacia delante de un bloque.
G1
G2
≈ G1±G2 C(s)
C(s) R(s) R(s)
±
+
G
H
G1/(1+GH)
C(s) R(s) +
R(s)
-
C(s)
≈
E(s)
G ≈
1/G
G
±
+ C(s) R(s)
R1(s)
+
±
R1(s)
R(s) C (s)
C(s)=C1(s)±R1(s)=
GR(s)±R1(s) C(s)=[R(s)±(1/G)R1(s)]G=
GR(s)±R1(s)
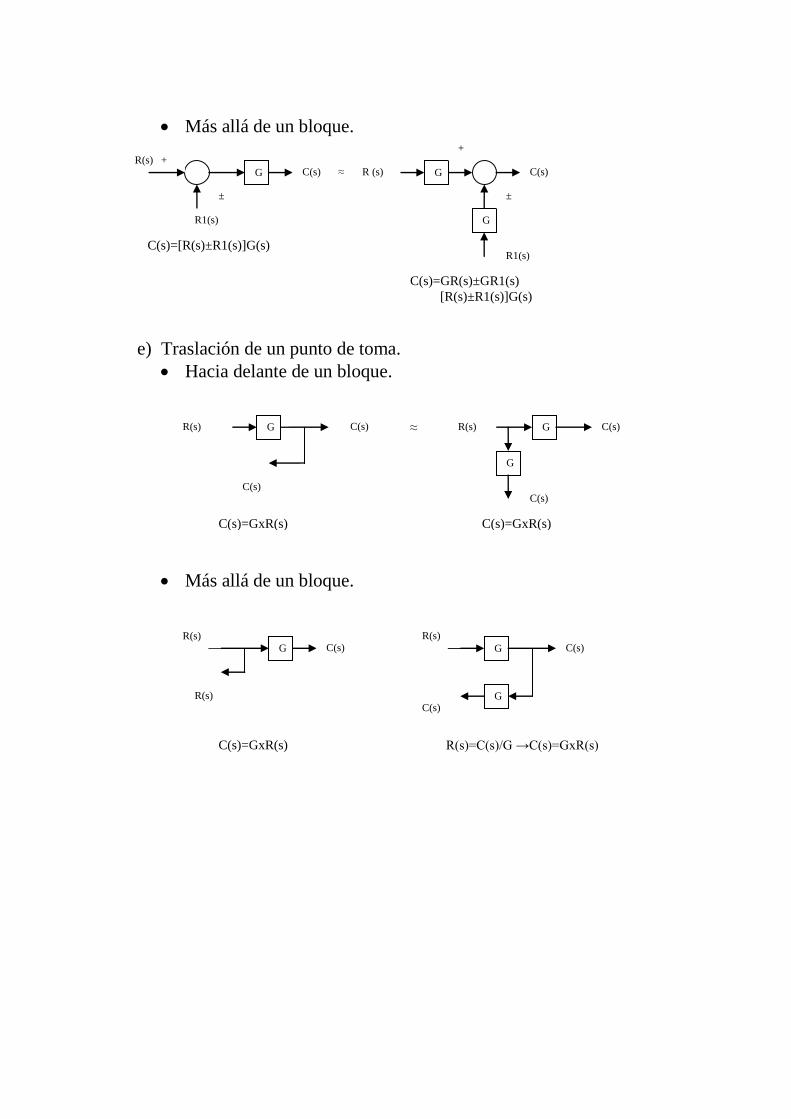
Más allá de un bloque.
e) Traslación de un punto de toma.
Hacia delante de un bloque.
Más allá de un bloque.
G
G
G
±
C(s) R(s) +
R1(s)
R1(s)
R (s) C(s)
±
+
C(s)=[R(s)±R1(s)]G(s)
C(s)=GR(s)±GR1(s)
[R(s)±R1(s)]G(s)
≈
G R(s) C(s)
C(s)
≈ G
G
R(s) C(s)
C(s)
C(s)=GxR(s) C(s)=GxR(s)
G G
G
C(s) C(s) R(s) R(s)
C(s) R(s)
C(s)=GxR(s) R(s)=C(s)/G →C(s)=GxR(s)
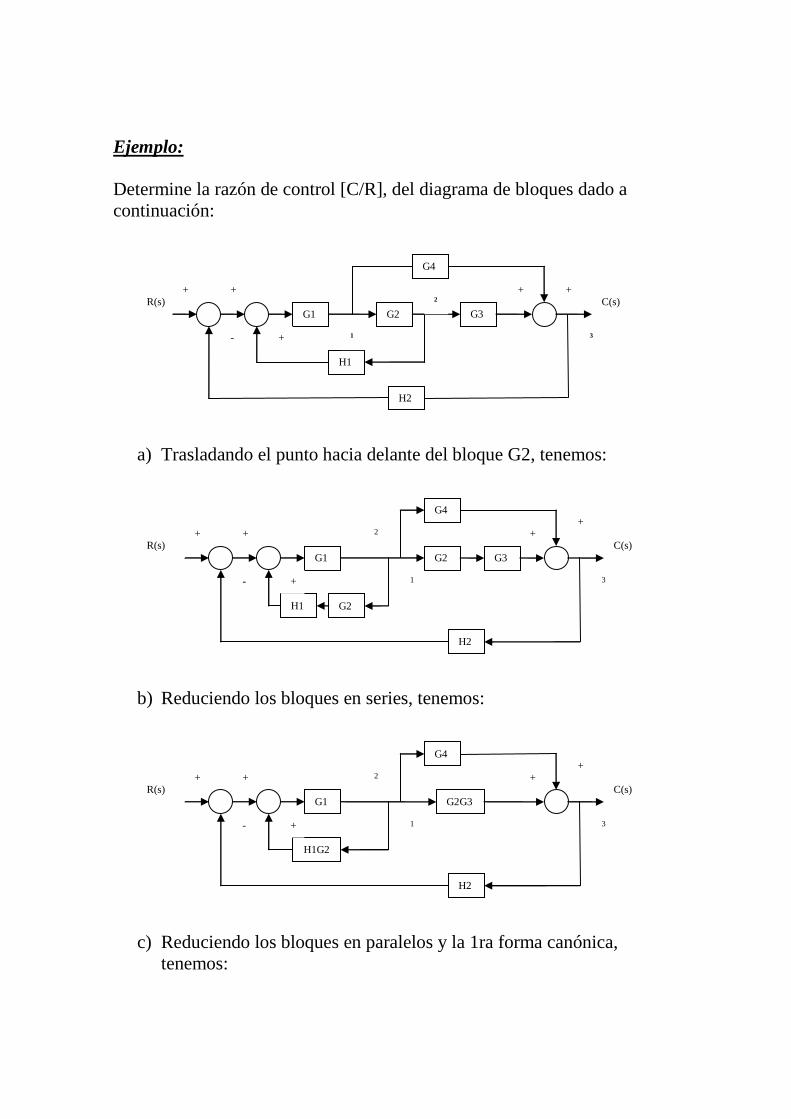
Ejemplo:
Determine la razón de control [C/R], del diagrama de bloques dado a
continuación:
a) Trasladando el punto hacia delante del bloque G2, tenemos:
b) Reduciendo los bloques en series, tenemos:
c) Reduciendo los bloques en paralelos y la 1ra forma canónica,
tenemos:
G4
G1 G2G3
H1G2
H2
R(s) C(s) + +
+ +
- +
2
1 3
G1
H1
G4
G3 G2
H2
R(s) C(s) + + +
- +
+
1
2
3
G4
G1 G2 G3
H1 G2
H2
R(s) C(s) + +
+ +
- +
2
1 3
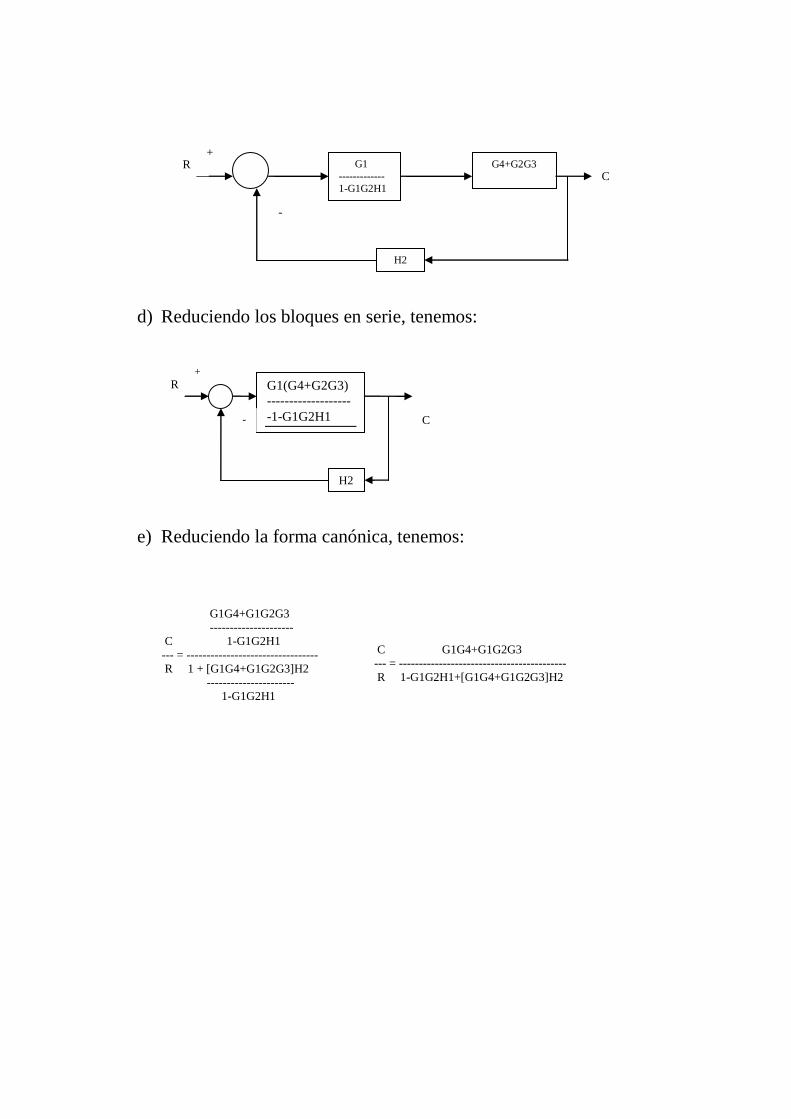
d) Reduciendo los bloques en serie, tenemos:
e) Reduciendo la forma canónica, tenemos:
G4+G2G3
H2
R C
+
-
G1
-------------
1-G1G2H1
G1(G4+G2G3)
-------------------
-1-G1G2H1
H2
C
+
R
-
G1G4+G1G2G3
---------------------
C 1-G1G2H1
--- = ---------------------------------
R 1 + [G1G4+G1G2G3]H2
----------------------
1-G1G2H1
C G1G4+G1G2G3
--- = ------------------------------------------
R 1-G1G2H1+[G1G4+G1G2G3]H2
b) FLUJOGRAMA, DIAGRAMA DE FLUJO o GRAFICO DE
FLUJO DE SEÑALES.
Los flujogramas al igual que los diagramas de bloques son representaciones
graficas de los sistemas de controles que nos permiten determinar las
relaciones funcionales de los distintos componentes y el flujo de señales
entre ellos.
Los flujogramas se componen de nudos y ramas, los nudos representan las
variables del sistema y estos se unen entre si mediante ramas que
representan las funciones de transmisión o ganancia de los distintos
componentes.
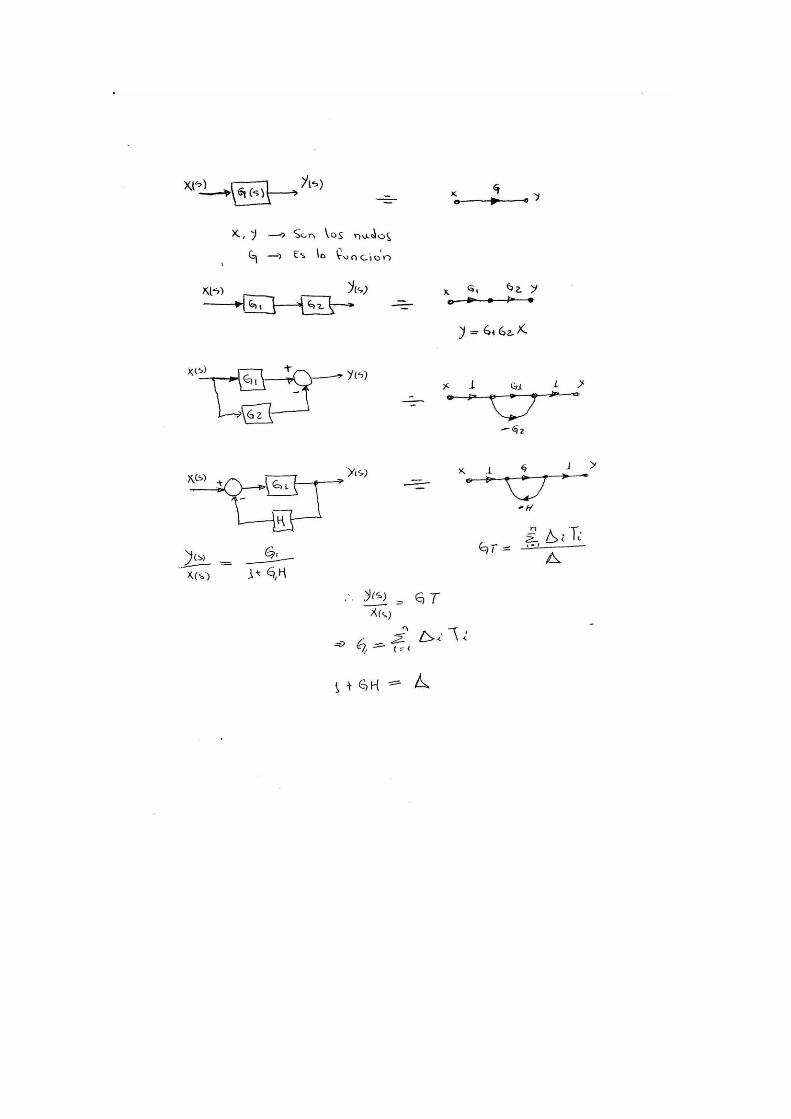
EQUIVALENCIA ENTRE UN DIAGRAMA DE BLOQUES Y UN
FLUJOGRAMA
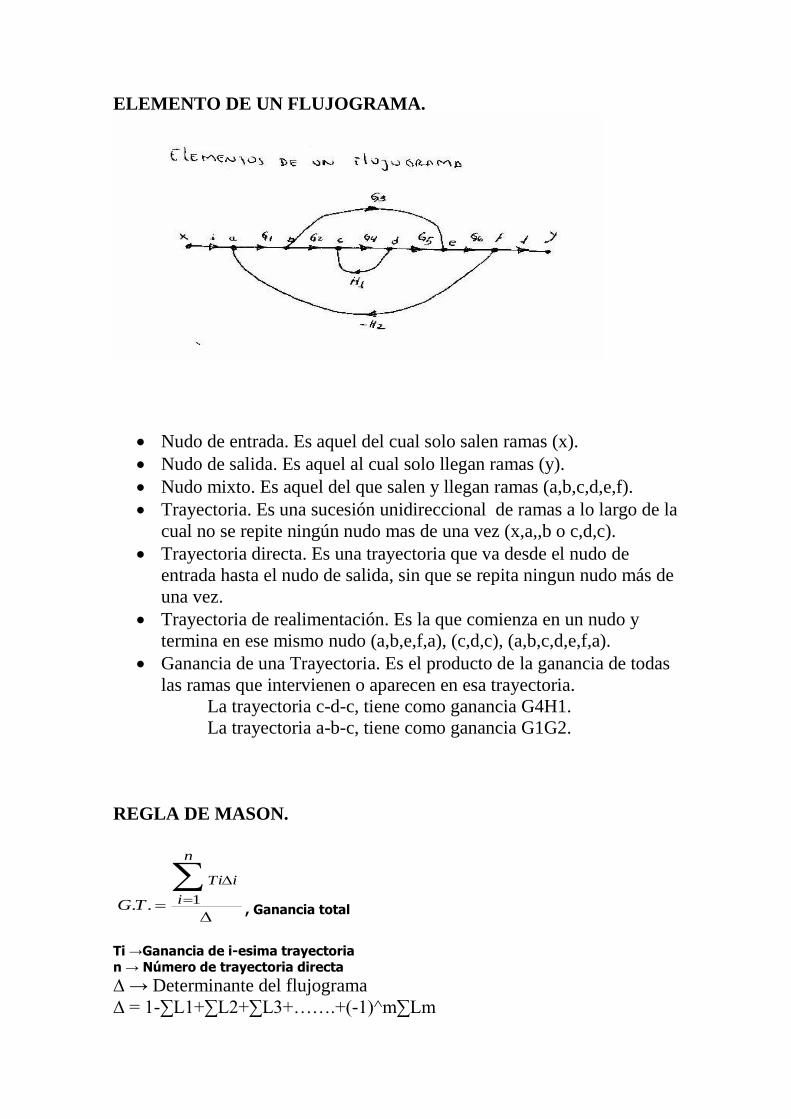
ELEMENTO DE UN FLUJOGRAMA.
Nudo de entrada. Es aquel del cual solo salen ramas (x).
Nudo de salida. Es aquel al cual solo llegan ramas (y).
Nudo mixto. Es aquel del que salen y llegan ramas (a,b,c,d,e,f).
Trayectoria. Es una sucesión unidireccional de ramas a lo largo de la
cual no se repite ningún nudo mas de una vez (x,a,,b o c,d,c).
Trayectoria directa. Es una trayectoria que va desde el nudo de
entrada hasta el nudo de salida, sin que se repita ningun nudo más de
una vez.
Trayectoria de realimentación. Es la que comienza en un nudo y
termina en ese mismo nudo (a,b,e,f,a), (c,d,c), (a,b,c,d,e,f,a).
Ganancia de una Trayectoria. Es el producto de la ganancia de todas
las ramas que intervienen o aparecen en esa trayectoria.
La trayectoria c-d-c, tiene como ganancia G4H1.
La trayectoria a-b-c, tiene como ganancia G1G2.
REGLA DE MASON.
n
i
iTi
TG 1.. , Ganancia total
Ti →Ganancia de i-esima trayectoria
n → Número de trayectoria directa
∆ → Determinante del flujograma
∆ = 1-∑L1+∑L2+∑L3+…….+(-1)^m∑Lm
Siendo m → numero de trayectoria de realimentación (lazos)
∑L1 → Suma de ganancia de todos los lazos
∑L2 → Suma de los productos de las ganancias de todas las
combinaciones posibles de cada dos (2) lazos que no se toquen.
∑L3 → Suma de los productos de las ganancias de todas las
combinaciones posibles de cada tres (3) lazos que no se toquen.
Y así sucesivamente hasta suma de ∑Lm.
Obs.: Dos lazos no se tocan cuando no tienen ningun nodo en comun.
∆i → Es el valor de ∆ evaluado cuando se eliminan todos los lazos que
tocan la trayectoria i.
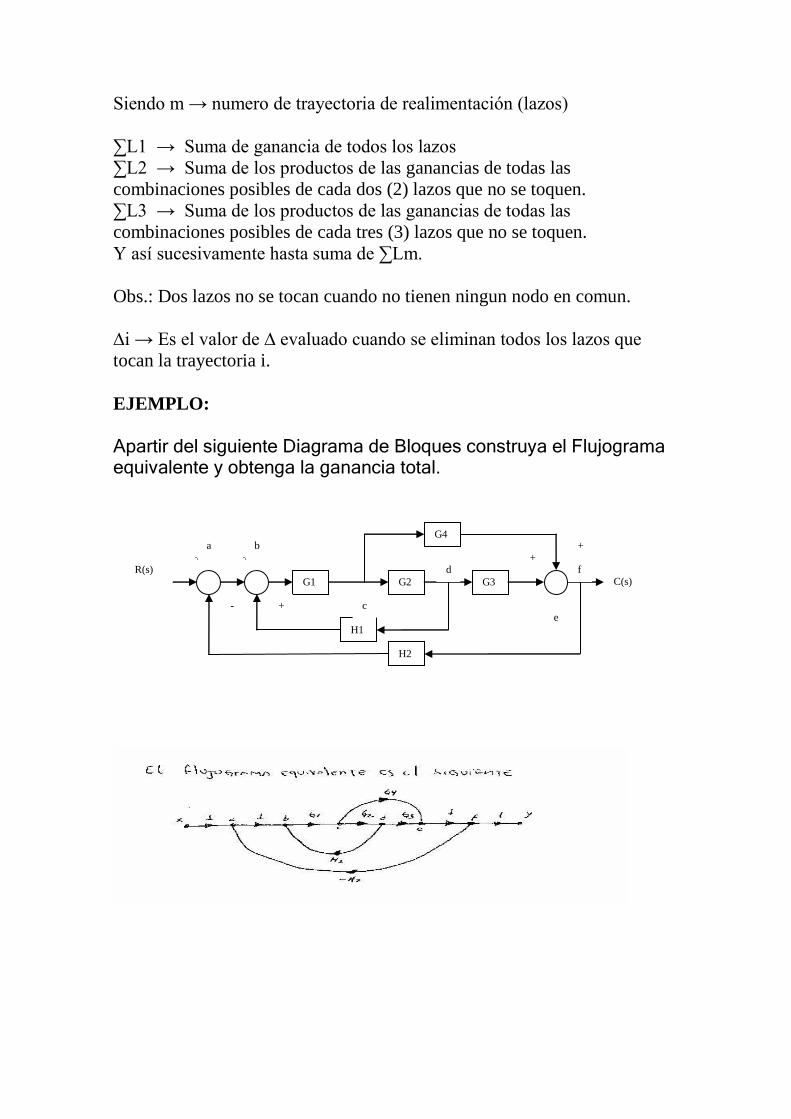
EJEMPLO:
Apartir del siguiente Diagrama de Bloques construya el Flujograma equivalente y obtenga la ganancia total.
G1
G4
G3 G2
H2
H1
R(s) C(s)
+ +
- +
+ + b a
c
d
e
f
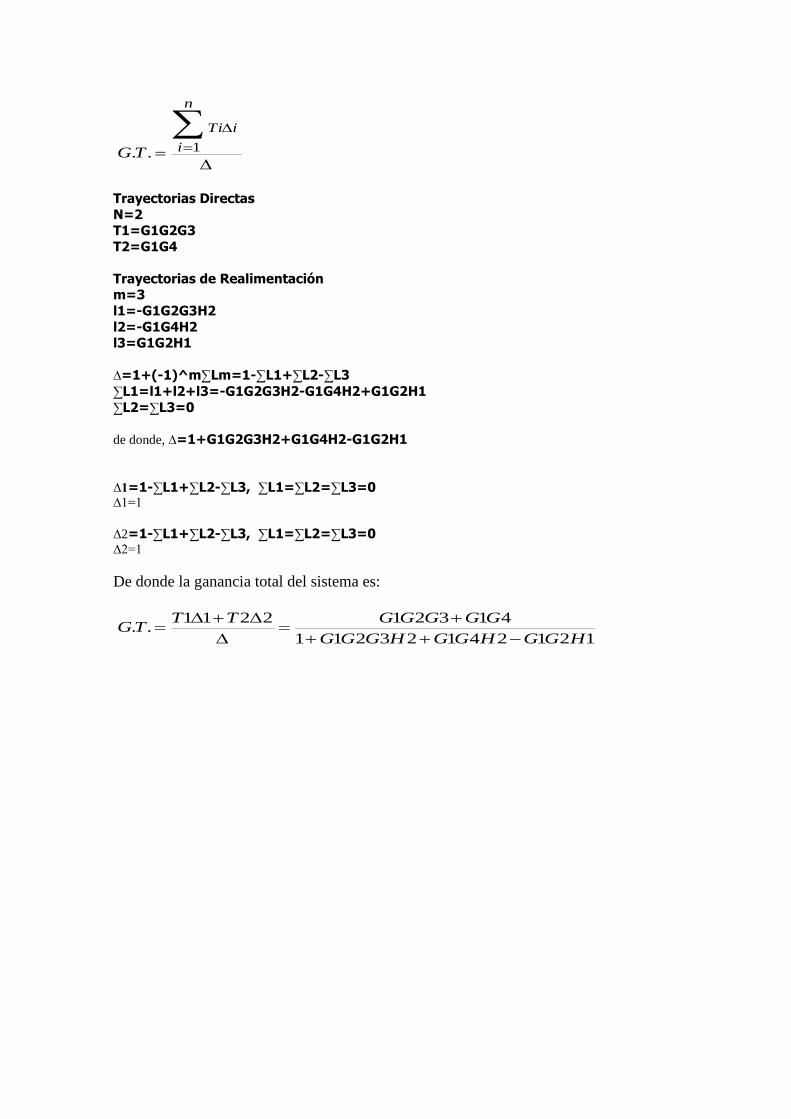
n
i
iTi
TG 1..
Trayectorias Directas
N=2 T1=G1G2G3
T2=G1G4
Trayectorias de Realimentación m=3
l1=-G1G2G3H2
l2=-G1G4H2 l3=G1G2H1
∆=1+(-1)^m∑Lm=1-∑L1+∑L2-∑L3
∑L1=l1+l2+l3=-G1G2G3H2-G1G4H2+G1G2H1
∑L2=∑L3=0
de donde, ∆=1+G1G2G3H2+G1G4H2-G1G2H1
∆1=1-∑L1+∑L2-∑L3, ∑L1=∑L2=∑L3=0 ∆1=1
∆2=1-∑L1+∑L2-∑L3, ∑L1=∑L2=∑L3=0 ∆2=1
De donde la ganancia total del sistema es:
12124123211
413212211..
HGGHGGHGGG
GGGGGTTTG
TEMA III. CRITERIO DE ESTABILIDAD.
Para determinar la estabilidad de un sistema hay que conocer las siguientes condiciones:
Un sistema es estable si permanece en su posición original a no ser que sea
excitado por una fuente externa y en tal caso volverá a su posición original una
vez desaparezca todas las perturbaciones.
Un sistema es estable si toda señal de entrada limitada produce una señal de
salida también limitada.
Un sistema es estable si su respuesta transitoria tiende a cero cuando el tiempo
tiende a infinito.
Atendiendo a la estabilidad los sistemas pueden ser clasificado en:
1. Sistema Estable
2. Sistema Inestable
3. Estabilidad Limite o Marginalmente Estable
La condición necesaria y suficiente para que un sistema sea estable es que las raíces de
la ecuación característica (Polos del sistema) tengan partes reales negativas, en caso
contrario, esto es que las raíces de la ecuación característica tengan por lo menos una
raíz con parte reales positivas entonces el sistema será inestable.
Notas:
No todas las raíces deben ser positivas, por lo menos una positiva entonces el
sistema será inestable.
Cuando todas las raíces son negativas entonces el sistema será estable.
Sistema Marginalmente Estable o Estabilidad Límite:
Un sistema será marginalmente estable o de estabilidad límite cuando no habiendo
raíces con parte real positiva existe por lo menos una raíz con parte real igual a cero.
Existen dos criterios de estabilidad y son:
1. Criterio de Estabilidad Absoluta, con este criterio se puede saber cuando un
sistema es o no es estable, y esto se obtiene mediante los siguientes métodos:
Criterio de Routh
Criterio de Hurwitz
Criterio de la fracción continuada
2. Criterio de Estabilidad Relativa, con este criterio se puede determinar el grado
de estabilidad de un sistema y esto se logra mediante los siguientes métodos:
Diagrama de Bode

Diagrama de Nyquist
Método de Lugar raíces
CRITERIO DE ROUTH.
Este es un método que se utiliza para determinar la estabilidad de un sistema que se
puede aplicar a una ecuación característica de n-esimo orden de la forma,
0..... 01
12
22
21
1
asasasasasa n
nn
nn
n
Sabemos que la ec. Característica se aplica apartir de un sistema de lazo cerrado de la
forma:
Donde el criterio se aplica utilizando la tabla de Routh que se define como:
En donde ..,........,1 0, caractecladecoeflosSonann aa y
G(s)
H(s)
-
+
R(s) C(s) 1+G(s)H(s)=0 → Ec. Caract.
(o polos del sistema)
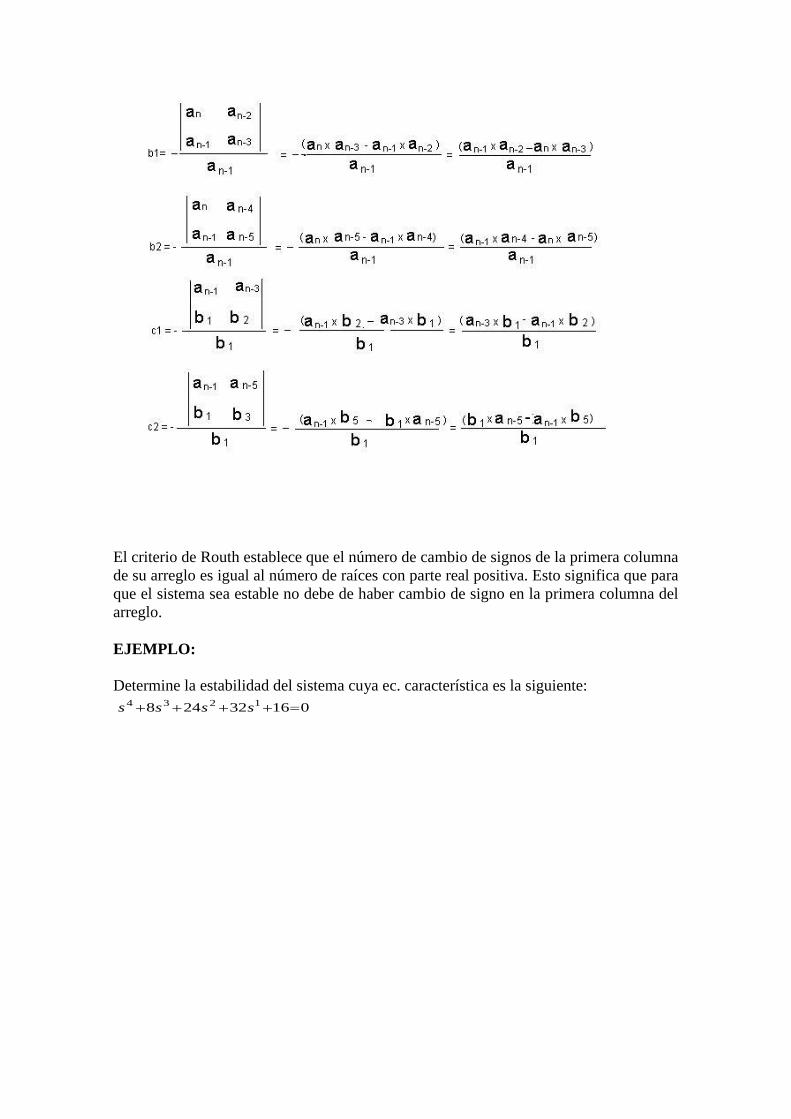
El criterio de Routh establece que el número de cambio de signos de la primera columna
de su arreglo es igual al número de raíces con parte real positiva. Esto significa que para
que el sistema sea estable no debe de haber cambio de signo en la primera columna del
arreglo.
EJEMPLO:
Determine la estabilidad del sistema cuya ec. característica es la siguiente:
01632248 1234 ssss
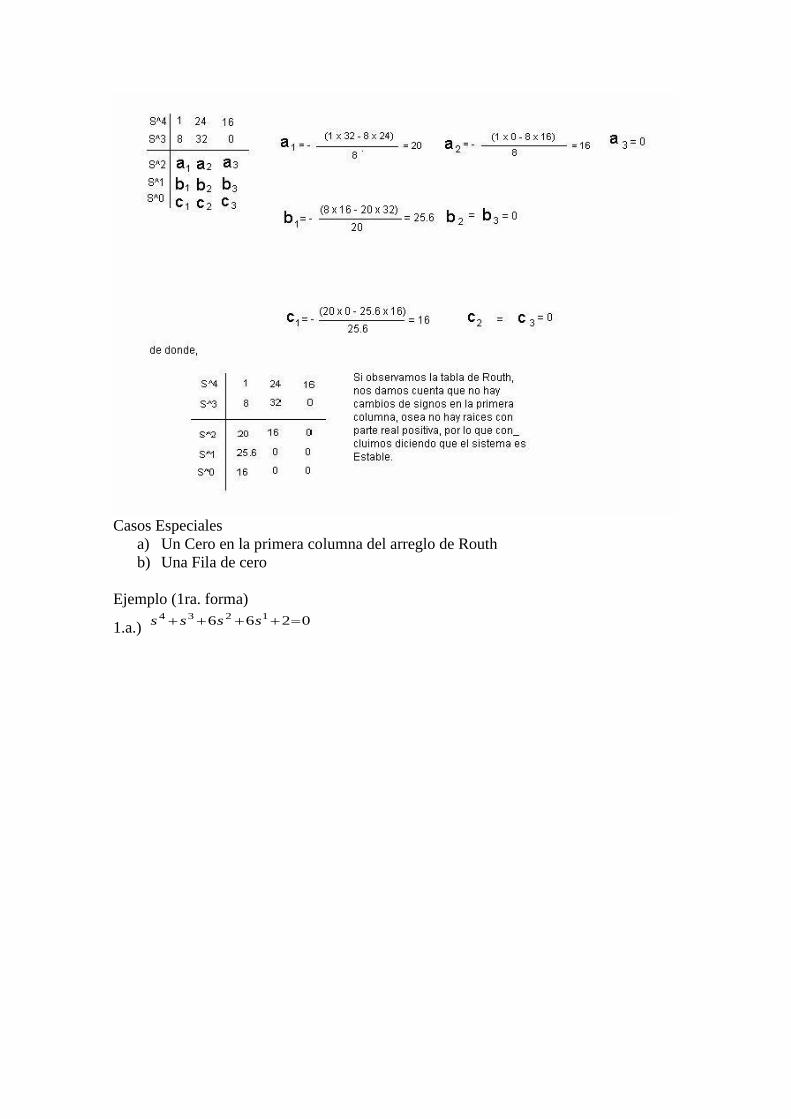
Casos Especiales
a) Un Cero en la primera columna del arreglo de Routh
b) Una Fila de cero
Ejemplo (1ra. forma)
1.a.) 0266 1234 ssss

(2da. forma)
Hacemos s=1/x, para formar una nueva ec. Característica cuyas raíces sean las inversas
de las raíces de la ec. dada 02)/1(6)/1(6)/1()/1( 1234 xxxx
, Mult. Por x4,
tendremos 01662 1234 xxxx
B) Determine la estabilidad del sistema representado por la siguiente ecuación:
04162520104 123456 SSSSSS

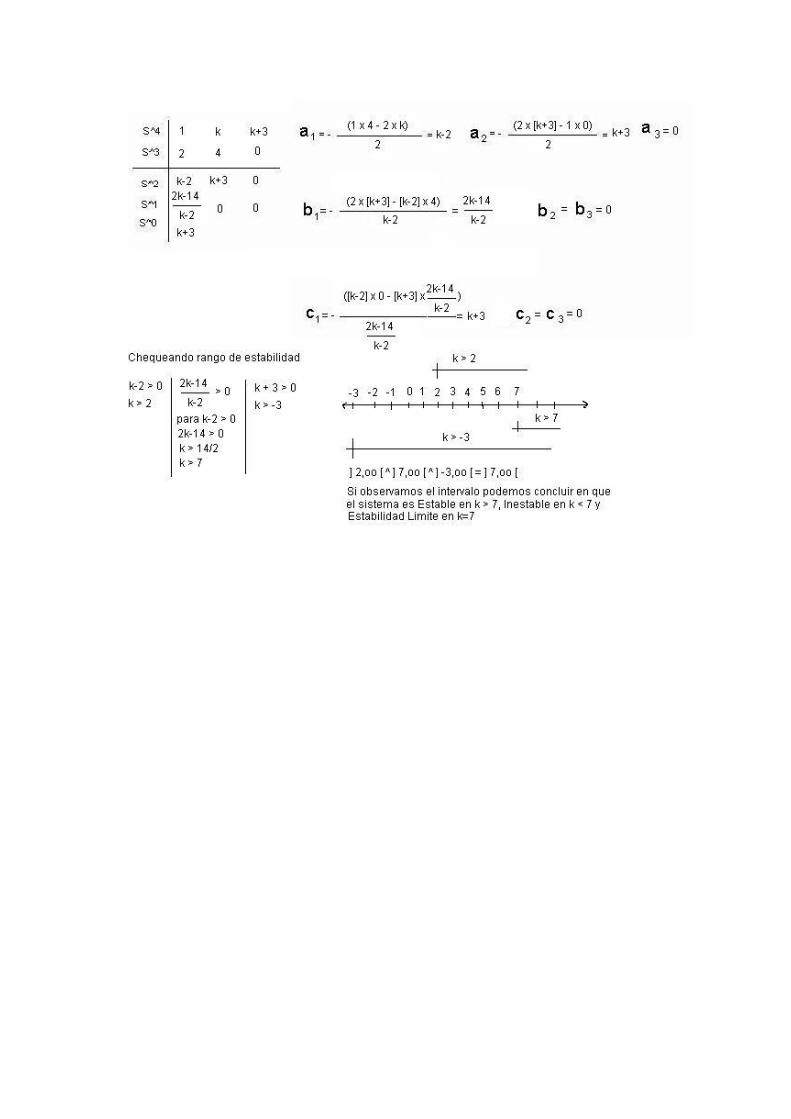
EJEMPLO:
Determine los valores de k que hacen el siguiente sistema Estable, lo que lo hacen
Inestable, y lo que lo hacen de Estabilidad Limite, ósea el rango de estabilidad, apartir
del siguiente diagrama de bloques:
32
4)(
34
2
SS
kSkSsG
)()(1
)(
)(
)(
sHsG
sG
sR
sR
, De donde 1+G(s)H(s)=0 → Ec. Característica
Como H(s)=0 → 1+G(s)=0, será igual a la ec. caract.
032
41
34
2
SS
kSkS
,
032
4
1
134
2
SS
kSkS
,
032
)4()32(34
234
SS
kSkSSS
De donde la Ecuación del sistema es:
0)3(42 1234 kSkSSS
Aplicando la tabla de Routh, tenemos:
G(s) R(s) C(s)
+
-
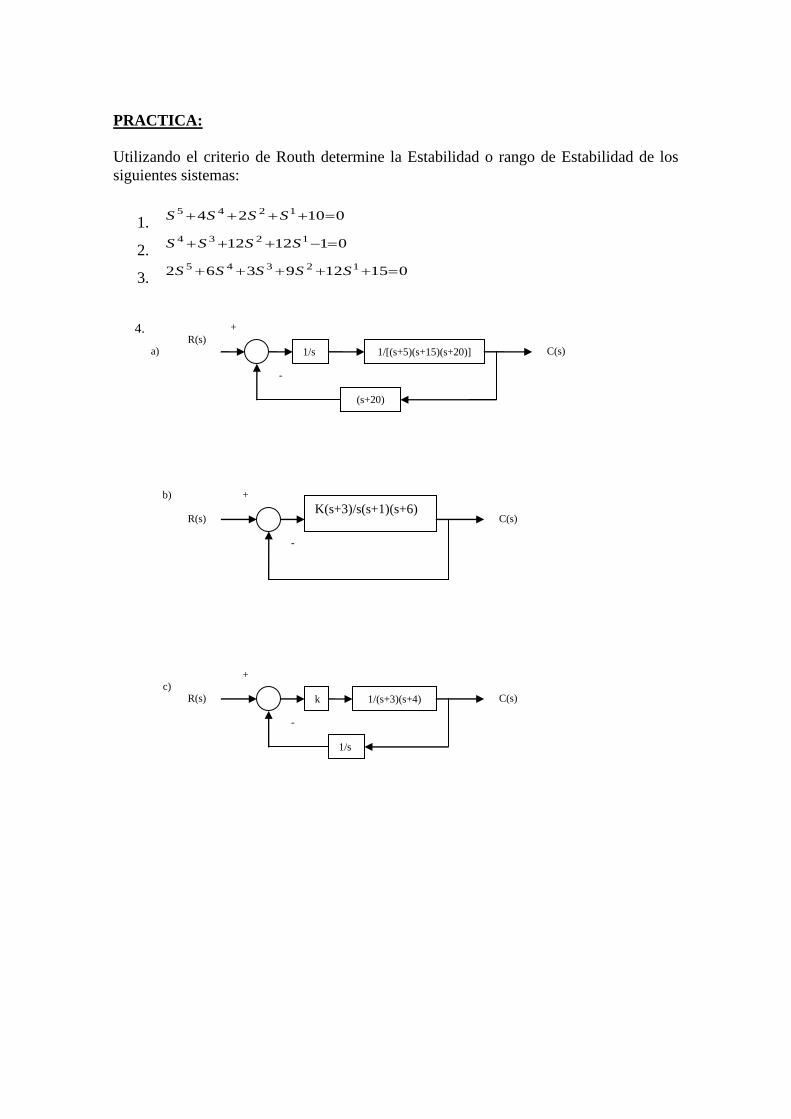
PRACTICA:
Utilizando el criterio de Routh determine la Estabilidad o rango de Estabilidad de los
siguientes sistemas:
1. 01024 1245 SSSS
2. 011212 1234 SSSS
3. 015129362 12345 SSSSS
4.
1/s 1/[(s+5)(s+15)(s+20)]
(s+20)
R(s) C(s)
+
-
a)
b) +
-
+
-
c)
K(s+3)/s(s+1)(s+6)
k 1/(s+3)(s+4)
1/s
R(s) C(s)
C(s) R(s)
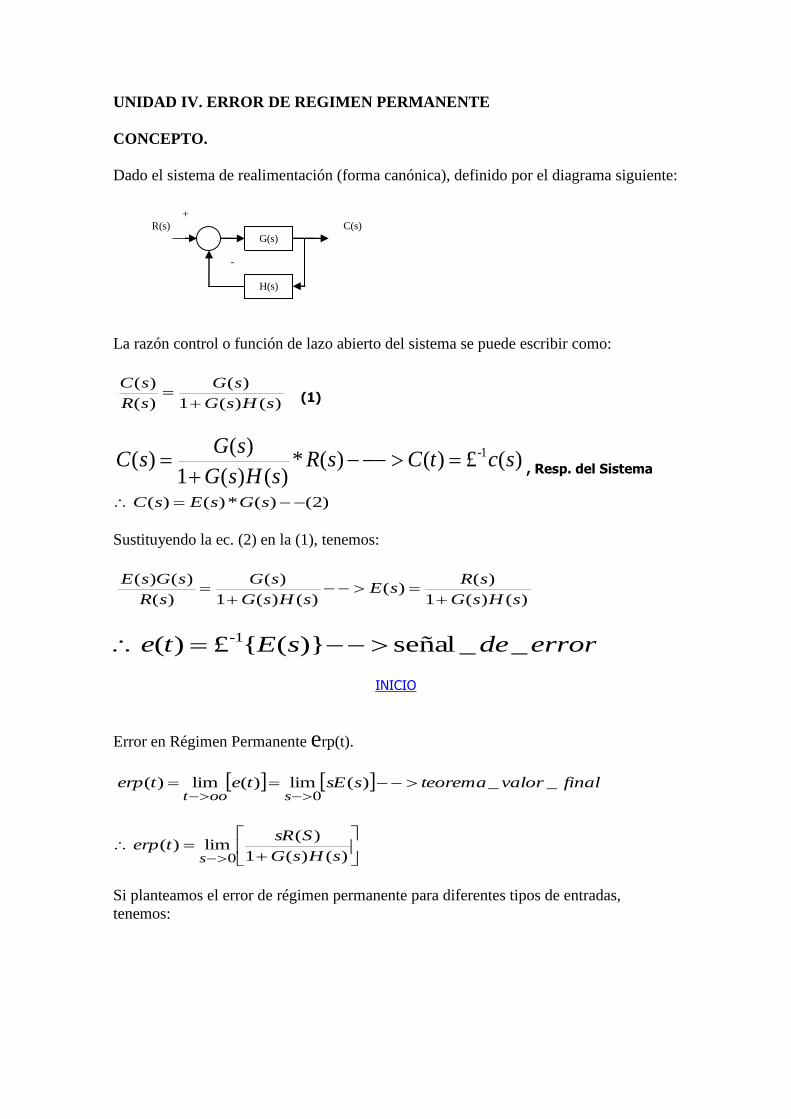
UNIDAD IV. ERROR DE REGIMEN PERMANENTE
CONCEPTO.
Dado el sistema de realimentación (forma canónica), definido por el diagrama siguiente:
La razón control o función de lazo abierto del sistema se puede escribir como:
)()(1
)(
)(
)(
sHsG
sG
sR
sC
(1)
)(£)()(*)()(1
)()( 1- sctCsR
sHsG
sGsC
, Resp. del Sistema
)2()(*)()( sGsEsC
Sustituyendo la ec. (2) en la (1), tenemos:
)()(1
)()(
)()(1
)(
)(
)()(
sHsG
sRsE
sHsG
sG
sR
sGsE
errordesEte __ señal)}({£)( -1
INICIO
Error en Régimen Permanente erp(t).
finalvalorteoremassEteterpsoot
__)(lim)(lim)(0
)()(1
)(lim)(
0 sHsG
SsRterp
s
Si planteamos el error de régimen permanente para diferentes tipos de entradas,
tenemos:
G(s)
H(s)
R(s) C(s)
-
+
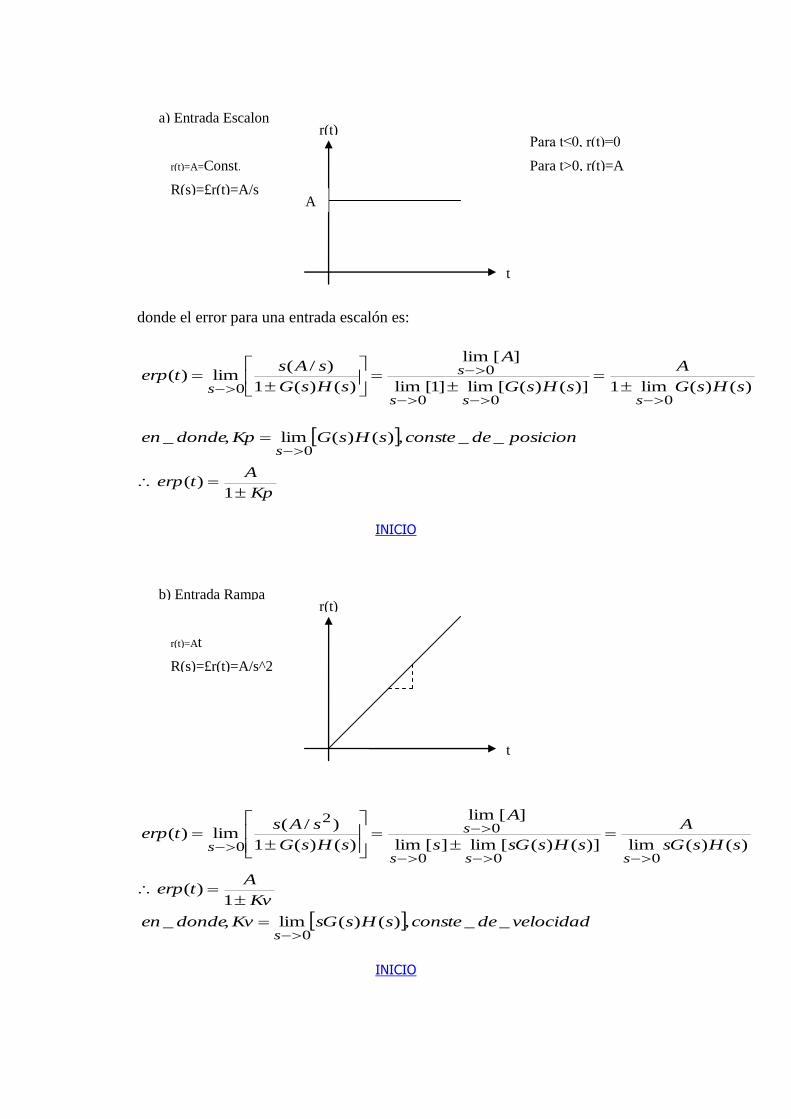
donde el error para una entrada escalón es:
)()(lim1)]()([lim]1[lim
][lim
)()(1
)/(lim)(
000
0
0 sHsG
A
sHsG
A
sHsG
sAsterp
sss
s
s
posiciondeconstesHsGKpdondeens
__,)()(lim,_0
Kp
Aterp
1)(
INICIO
)()(lim)]()([lim][lim
][lim
)()(1
)/(lim)(
000
02
0 sHssG
A
sHssGs
A
sHsG
sAsterp
sss
s
s
Kv
Aterp
1)(
velocidaddeconstesHssGKvdondeens
__,)()(lim,_0
INICIO
r(t)
t
r(t)=At
R(s)=£r(t)=A/s^2
b) Entrada Rampa
r(t)
t
A
r(t)=A=Const.
R(s)=£r(t)=A/s
a) Entrada Escalon
Para t≤0, r(t)=0
Para t>0, r(t)=A
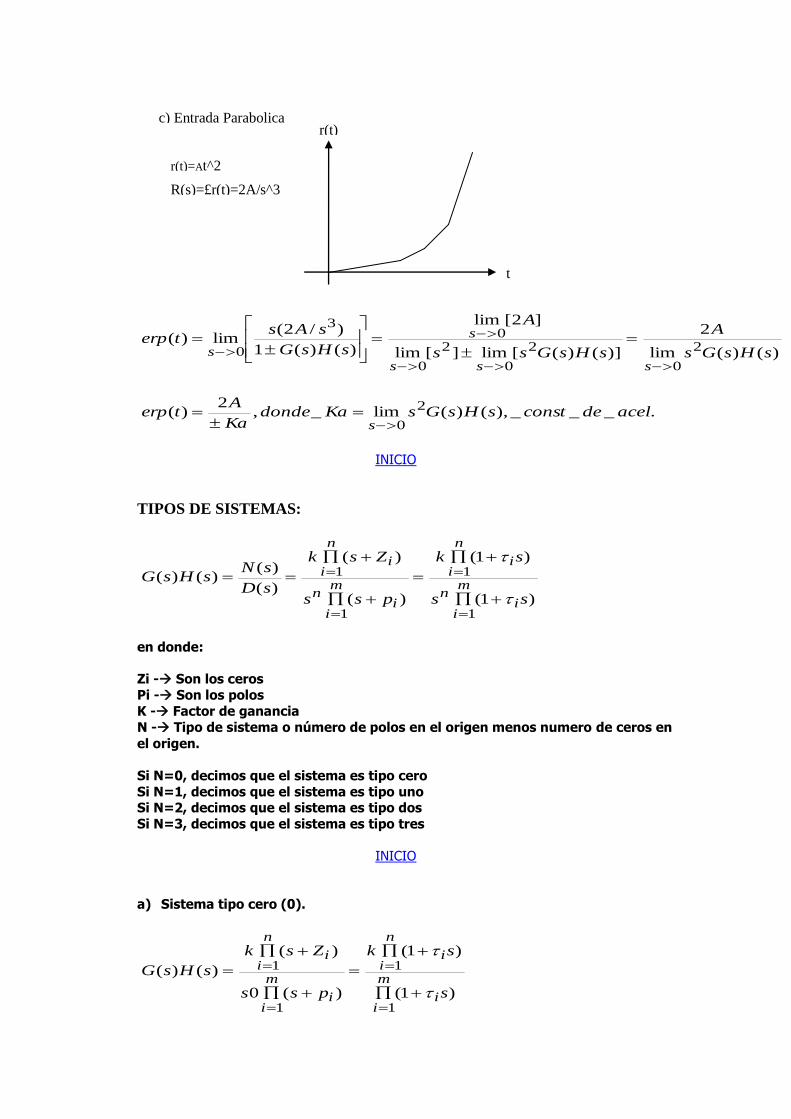
)()(lim
2
)]()([lim][lim
]2[lim
)()(1
)/2(lim)(
2
0
2
0
2
0
03
0 sHsGs
A
sHsGss
A
sHsG
sAsterp
sss
s
s
.___),()(lim_,2
)( 2
0aceldeconstsHsGsKadonde
Ka
Aterp
s
INICIO
TIPOS DE SISTEMAS:
)1(
)1(
)(
)(
)(
)()()(
1
1
1
1
ss
sk
pss
Zsk
sD
sNsHsG
i
m
i
n
i
n
i
i
m
i
n
i
n
i
en donde: Zi - Son los ceros
Pi - Son los polos
K - Factor de ganancia
N - Tipo de sistema o número de polos en el origen menos numero de ceros en
el origen.
Si N=0, decimos que el sistema es tipo cero
Si N=1, decimos que el sistema es tipo uno Si N=2, decimos que el sistema es tipo dos
Si N=3, decimos que el sistema es tipo tres
INICIO
a) Sistema tipo cero (0).
)1(
)1(
)(0
)(
)()(
1
1
1
1
s
sk
pss
Zsk
sHsG
i
m
i
i
n
i
i
m
i
i
n
i
r(t)
t
r(t)=At^2
R(s)=£r(t)=2A/s^3
c) Entrada Parabolica

de donde:
0
1
1
1
1
00)0(
)0(
lim)]()([lim K
p
Zk
p
Zk
sHsGKp
i
m
i
i
n
i
i
m
i
i
n
i
ss
permanenteregenErrorK
Atrp ____,
1)(
0
00)]()([lim][lim)]()([lim000
psss
v xKsHsGxssHssGK
0
)(A
K
At
v
rp
00)]()([lim][lim)]()([lim0
2
0
2
0
p
sssv xKsHsGxssHsGsK
0
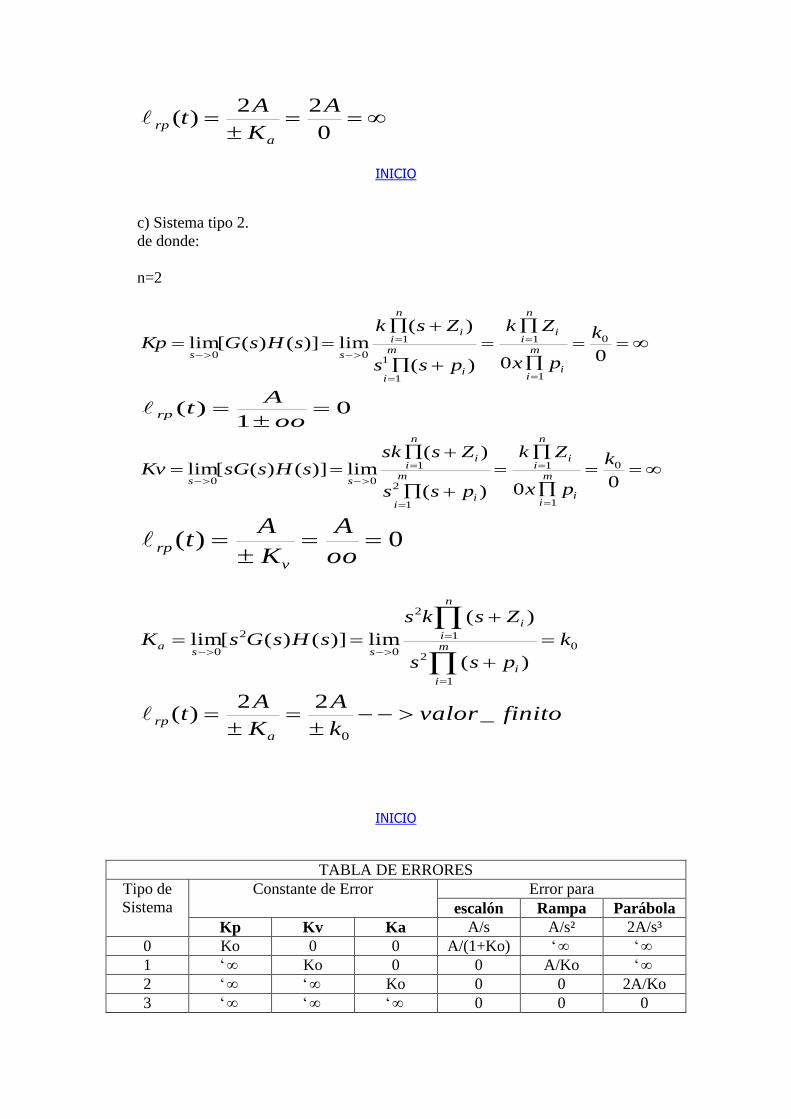
22)(
A
K
At
a
rp
INICIO
B) SISTEMA TIPO (1).
de donde:
n=1
00)(
)(lim)]()([lim 0
1
1
1
1
1
00
k
px
Zk
pss
ZsksHsGKp
i
m
i
i
n
i
i
m
i
i
n
i
ss
01
)(
oo
Atrp
0
1
1
00
)(
)(
lim)]()([lim k
pss
zssk
sHssGKm
i
i
n
i
i
ssv
finitovalork
A
K
At
v
rp _)(0
00
)(
)(
lim)]()([lim 0
1
1
2
0
2
0
xk
pss
Zsks
sHsGsKm
i
i
n
i
i
ssa
0
22)(
A
K
At
a
rp
INICIO
c) Sistema tipo 2.
de donde:
n=2
00)(
)(lim)]()([lim 0
1
1
1
1
1
00
k
px
Zk
pss
ZsksHsGKp
i
m
i
i
n
i
i
m
i
i
n
i
ss
01
)(
oo
Atrp
00)(
)(lim)]()([lim 0
1
1
1
2
1
00
k
px
Zk
pss
ZssksHssGKv
i
m
i
i
n
i
i
m
i
i
n
i
ss
0)(
oo
A
K
At
v
rp
0
1
2
1
2
0
2
0
)(
)(
lim)]()([lim k
pss
Zsks
sHsGsKm
i
i
n
i
i
ssa
finitovalork
A
K
At
a
rp _22
)(0
INICIO
TABLA DE ERRORES
Tipo de
Sistema
Constante de Error Error para
escalón Rampa Parábola
Kp Kv Ka A/s A/s² 2A/s³
0 Ko 0 0 A/(1+Ko) ‘ ‘
1 ‘ Ko 0 0 A/Ko ‘
2 ‘ ‘ Ko 0 0 2A/Ko
3 ‘ ‘ ‘ 0 0 0
Observando la tabla llegamos a las siguientes conclusiones:
1. El valor del error en régimen permanente es inversamente proporcional a los
coeficientes de errores Kp, Kv, Ka.
2. Conforme aumenta el tipo de error disminuye cada integración y aumenta el tipo
de error. c/integración adicional agrava el problema de la estabilidad, esto es un
aumento exagerado del tipo de sistema producirá un sistema inestable.
3. Un aumento exagerado de la constante de error con el objetivo de disminuir el
error en régimen permanente puede producirnos un sistema Inestable.
4. La estabilidad y el error deben de analizarse de forma conjunta debido a su
interrelación.
INICIO
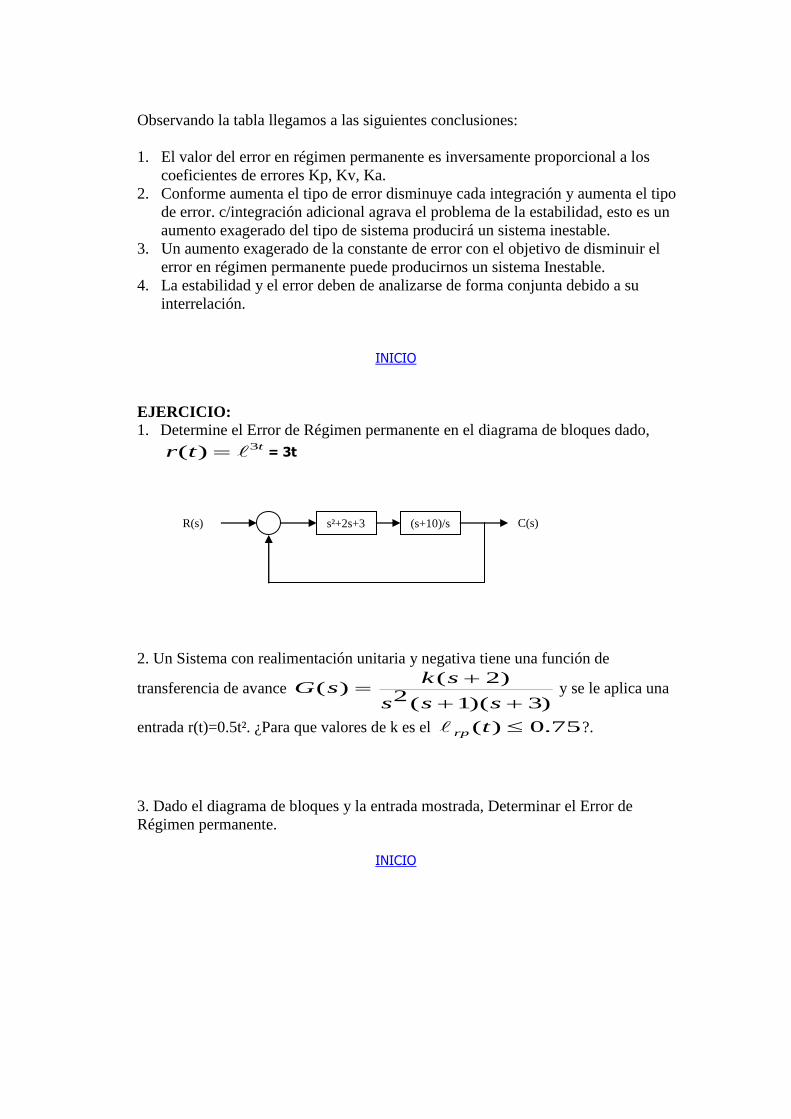
EJERCICIO:
1. Determine el Error de Régimen permanente en el diagrama de bloques dado, ttr 3)( = 3t
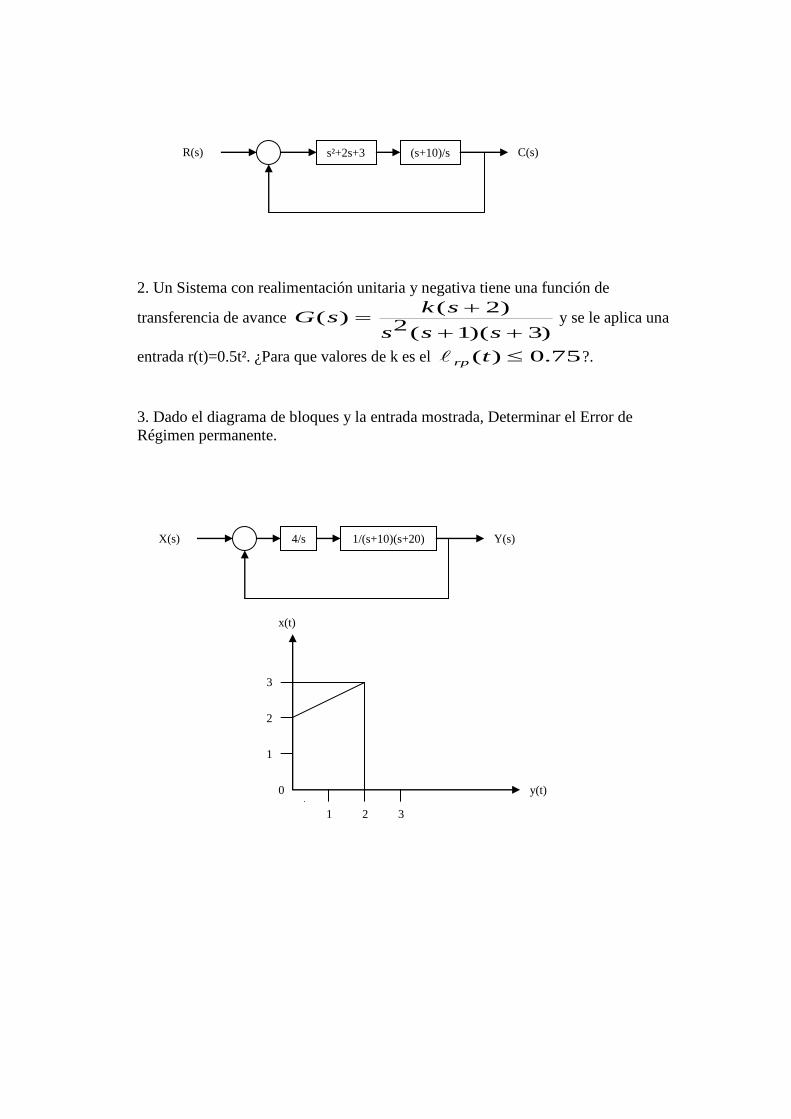
2. Un Sistema con realimentación unitaria y negativa tiene una función de
transferencia de avance )3)(1(2
)2()(
sss
sksG y se le aplica una
entrada r(t)=0.5t². ¿Para que valores de k es el 75.0)( trp ?.
3. Dado el diagrama de bloques y la entrada mostrada, Determinar el Error de
Régimen permanente.
INICIO
s²+2s+3 (s+10)/s R(s) C(s)
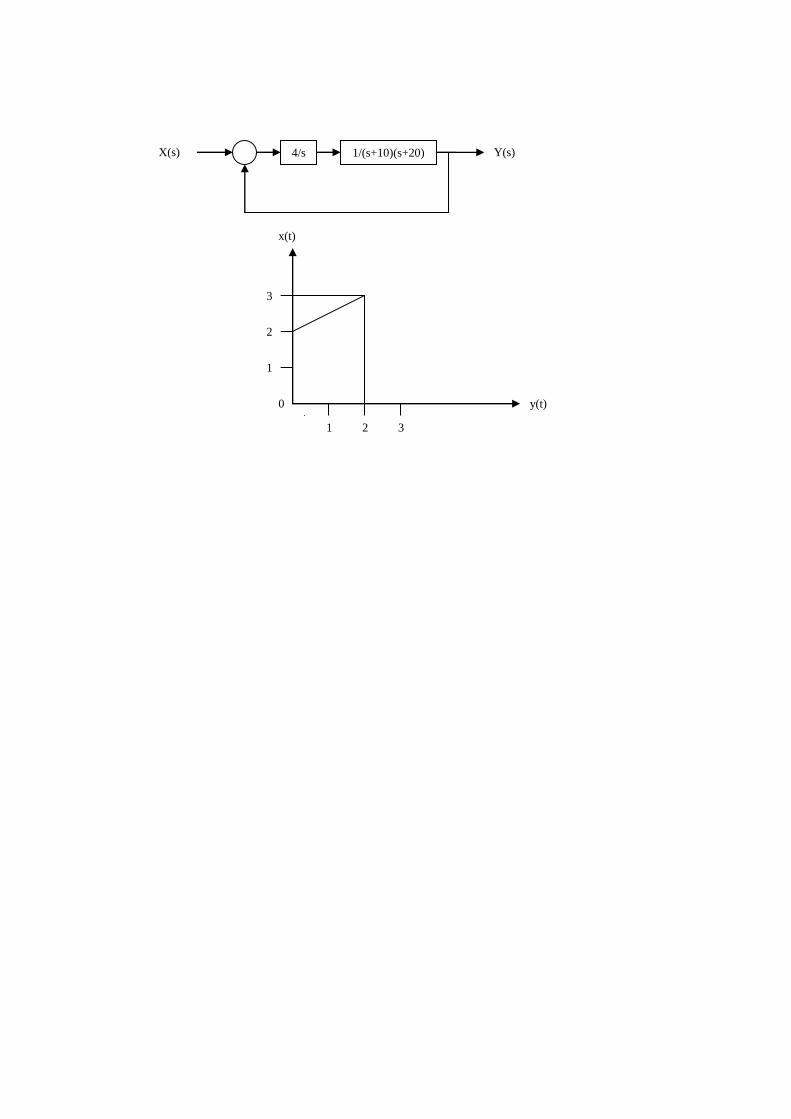
4/s 1/(s+10)(s+20) X(s) Y(s)
x(t)
y(t)
3
2
1
0
1 2 3

VI. RESPUESTA A LA FRECUENCIA.
Se llama respuesta a la frecuencia, a la respuesta en régimen permanente de los sistemas
cuando la señal de entrada es una onda sinusoidal de amplitud constante y frecuencia
variable.
)]()[cos()( 0
)(
0 RR
wtj wtjsenwtRRtr R
)]()[cos()( 0
)(
0 cc
wtjwtjsenwtCCtc c
RC
j
jjwt
jjwt
wtj
wtj
Rc
R
C
R
c
R
C
xR
xC
R
C
tr
tc
,)(
)( )(
0
0
0
0
)(
0
)(
0
jxR
C
tr
tc
0
0
)(
)( ,
En donde fasedeAnguloamplituddelacionR
CRC ___,__Re
0
0
Nota: La relación de amplitud y el ángulo son característica importante de la respuesta a
la frecuencia.
Si a un sistema linear caracterizado por la ecuación:
011
1
1011
1
1
)(...
)()()(...
)()(b
dt
tdrb
dt
trdb
dt
trdba
dt
tdca
dt
tcda
dt
tcda
n
n
nn
n
nn
n
nn
n
n
Le aplicamos una señal de entrada jwtRtr 0)( y una señal de salida )(
0)( wtjCtc ,
entonces tendremos: jwtn
n
n
n
n
n
n
n
wtj RbjwbjwbjwbajwajwajwaC 001
1
101
1
1
)(
0 ])(...)()([])(...)()([
Aajwajwajwa
bjwbjwbjwb
R
C
tr
tcn
n
n
n
n
n
n
n
jwt
wtj
01
1
1
01
1
1
0
)(
0
)(..)()(
)(..)()(
)(
)(
Si a la ecuación diferencial dada en (A) le aplicamos transformada de Laplace,
tendremos:
BaSaSaSa
bSbSbSb
sR
sCsF
n
n
n
n
n
n
n
n
01
1
1
01
1
1
..
..
)(
)()(
Sistema C(t) R(t)
A sen wt B sen wt
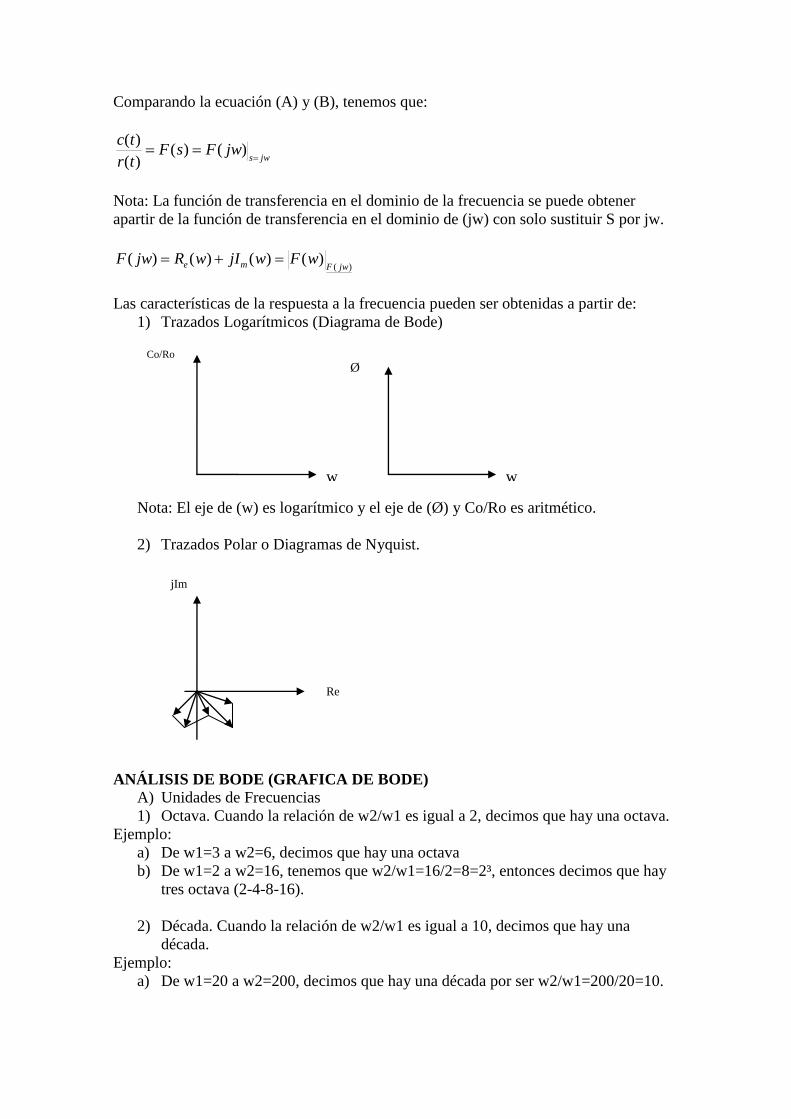
Comparando la ecuación (A) y (B), tenemos que:
jwsjwFsF
tr
tc
)()()(
)(
Nota: La función de transferencia en el dominio de la frecuencia se puede obtener
apartir de la función de transferencia en el dominio de (jw) con solo sustituir S por jw.
)()()()()(
jwFme wFwjIwRjwF
Las características de la respuesta a la frecuencia pueden ser obtenidas a partir de:
1) Trazados Logarítmicos (Diagrama de Bode)
Nota: El eje de (w) es logarítmico y el eje de (Ø) y Co/Ro es aritmético.
2) Trazados Polar o Diagramas de Nyquist.
ANÁLISIS DE BODE (GRAFICA DE BODE)
A) Unidades de Frecuencias
1) Octava. Cuando la relación de w2/w1 es igual a 2, decimos que hay una octava.
Ejemplo:
a) De w1=3 a w2=6, decimos que hay una octava
b) De w1=2 a w2=16, tenemos que w2/w1=16/2=8=2³, entonces decimos que hay
tres octava (2-4-8-16).
2) Década. Cuando la relación de w2/w1 es igual a 10, decimos que hay una
década.
Ejemplo:
a) De w1=20 a w2=200, decimos que hay una década por ser w2/w1=200/20=10.
w
Ø
w
Co/Ro
Re
jIm

b) De w=5 a w2=5000, tenemos que w2/w1=5000/5=1000=10³, entonces decimos
que hay tres décadas (5-50-500-5000).
B) Unidades de Angulo. Grado
C) Unidades de Magnitud. dB
20 Log (relación de amplitud) = 20 Log [Co/Ro] = 20 Log |F(jw)|
La función de transferencia en el dominio de la frecuencia se puede generalizar como
sigue:
M
m
R
k mkmk
km
n
Q
i
ib
w
jwjw
wjwjw
jwk
jwF
1 1
21
]2
1[)1()(
)1(
)(
La función de transferencia incluye Q ceros en el eje real, N polos en el origen, M pares
de polos en el eje real, R pares de polos complejos conjugados.
R
i
w
jw
w
M
m
m
nQ
i
ib
mkmk
k jwjw
jwjwkjwF
1
22
1
1
)()(1log20)1log(20
log20)1log(20log20)(log20
Y el diagrama de bode puede determinarse sumando las graficas debida a cada factor
individual. Además la grafica del ángulo de fase separada se obtiene como:
Q
i
M
m
R
kww
ww
miwmk
mkko tgwtgNwtg
1 1 1
211
)90(
1
)( 2)()(
Que es simplemente la suma de los ángulos de fases debido a cada factor individual de
la función de transferencia.
En la función de transferencia tenemos cuatros (4) factores y son:
1) Factor Constante Kb
2) Polos (o ceros) en el origen (jw)
3) Polos (o ceros) en el eje real (1+jwτ)
4) Polos (o ceros) complejos conjugados 22 )()(1mm w
jw
w jw
ientoamortiguamdeeCoeficient
naturalfrecuenciawm
__
_
CONSTRUCCIÓN GRAFICA DE BODE.
1. F(jw)=Kb --- Factor constante
][log20log20 )( dBkF bdBjw
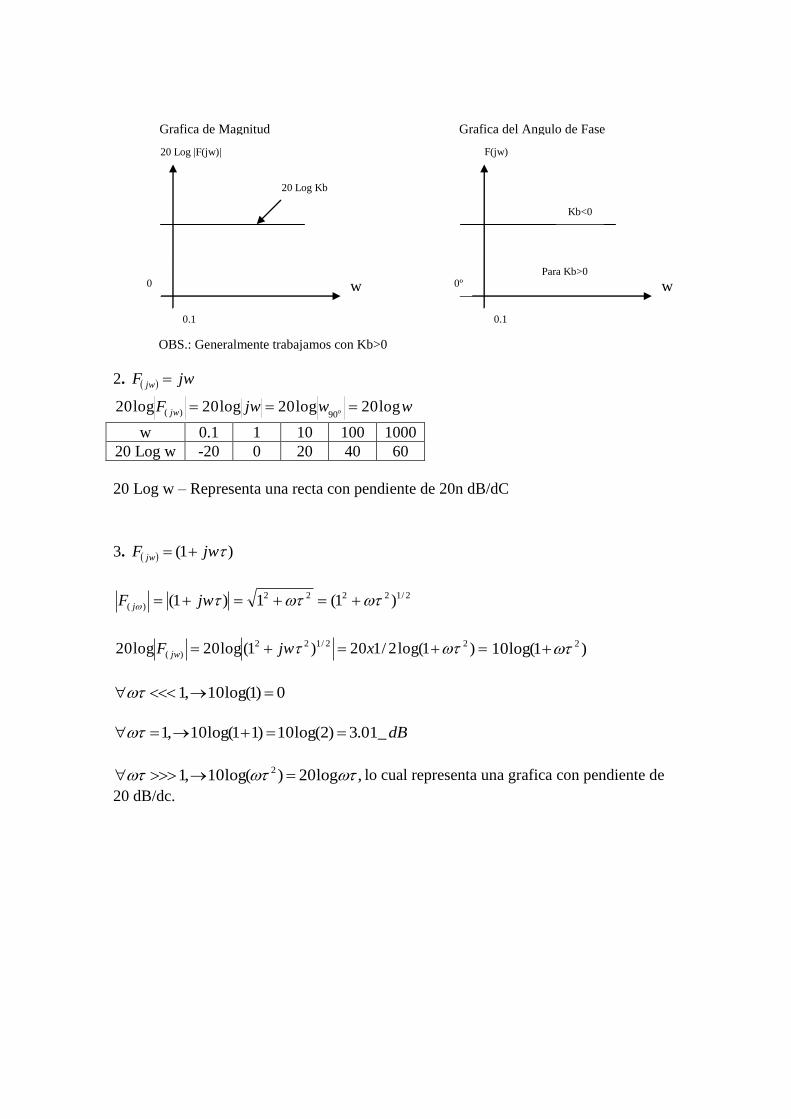
2. jwF jw
wwjwF ojw log20log20log20log2090)(
w 0.1 1 10 100 1000
20 Log w -20 0 20 40 60
20 Log w – Representa una recta con pendiente de 20n dB/dC
3. )1( jwF jw
2/12222
)( )1(1)1( jwF j
)1log(2/120)1(log20log20 22/122
)( xjwF jw )1log(10 2
0)1log(10,1
dB_01.3)2log(10)11log(10,1
,log20)log(10,1 2 lo cual representa una grafica con pendiente de
20 dB/dc.
20 Log Kb
Kb<0
20 Log |F(jw)|
Grafica de Magnitud
F(jw)
Grafica del Angulo de Fase
w w 0
0.1
0º
0.1
Para Kb>0
OBS.: Generalmente trabajamos con Kb>0
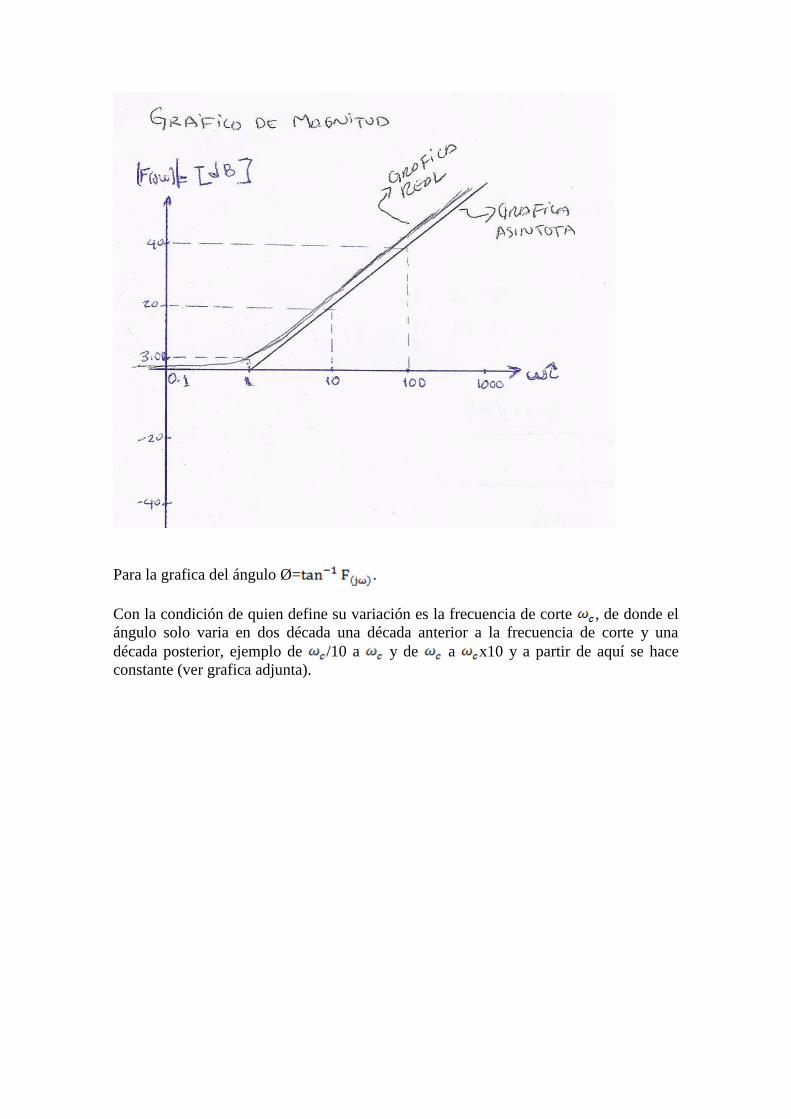
Para la grafica del ángulo Ø= .
Con la condición de quien define su variación es la frecuencia de corte , de donde el
ángulo solo varia en dos década una década anterior a la frecuencia de corte y una
década posterior, ejemplo de /10 a y de a x10 y a partir de aquí se hace
constante (ver grafica adjunta).

4. Para =
2/22222/
)( )1(1)1( NN
N
j jwF =
222/22
)( 1log10)1log(2/20)1(log20log20 NxNwF N
jw
De donde:
0)1log(10,1 Tiende a cero
EJEMPLO 1:
Apartir de la función de transferencia dada a continuación, construya las resultantes de
las graficas de Bode.
2)180/)(130/(
)10(10)(
ss
sssF
jwssiss
ss
ss
s
_
)180/)(130/(
)110/(100
)180/)(130/(
)1010)(10(1022
dCdBNapendientecongraficaatiendeNN 20______log20log101 2
2)180/)(130/(
)110/(100)(,
jwjw
jwjwjwFtenemos
2111 )180/()130/()110/(10)( jwjwjwjwjwF
No. Factor Frec. Corte
Wc
Grafica de magnitud Angulo de fase
Ø
1 Kb=100 -- Recta const. en
20log100=40dB
Ø=0º por ser Kb>0, rect.
const.
2 Jw
N=1
-- Pasa por 0dB en w=1
y crece con pend.
20N dB/dC=20dB/dC
Recta const. en 90N, por
ser la parte real de factor=0
3 (jw/10+1)
N=1
Wc=1/τ, τ=1/10,
Wc=10
Wc≤10, 0dBال
Wc>10, crece a 20Nال
dB/dC, como N=1,
crece a 20dB/dC
Wc≤1, Ø=0ºال
Wc=10, Ø=45N=45ºال
Wc≥100, Ø=90N=90ºال
4 (jw/30+1)
N=-1
Wc=30 الWc≤30, 0dB
Wc>30, crece a 20Nال
dB/dC, como N=1,
crece a 20dB/dC
Wc≤3, Ø=0ºال
Wc=30, Ø=45N=45ºال
Wc≥300, Ø=90N=90ºال
5 (jw/80+1)
N=-1
Wc=80 الWc≤80, 0dB
Wc>80, crece a 20Nال
dB/dC, como N=1,
crece a 20dB/dC
Wc≤8, Ø=0ºال
Wc=80, Ø=45N=45ºال
Wc≥800, Ø=90N=90ºال
EJEMPLO 2:
Apartir de la función de transferencia dada a continuación, construya las resultantes de
las graficas de Bode.
2)180/)(13/(
)20(5)(
ss
sssF
jwssiss
ss
ss
ss
_
)180/)(13/(
)120/(100
)180/)(13/(
)2020)(20(522
2)180/)(13/(
)120/(100)(,
jwjw
jwjwjwFtenemos
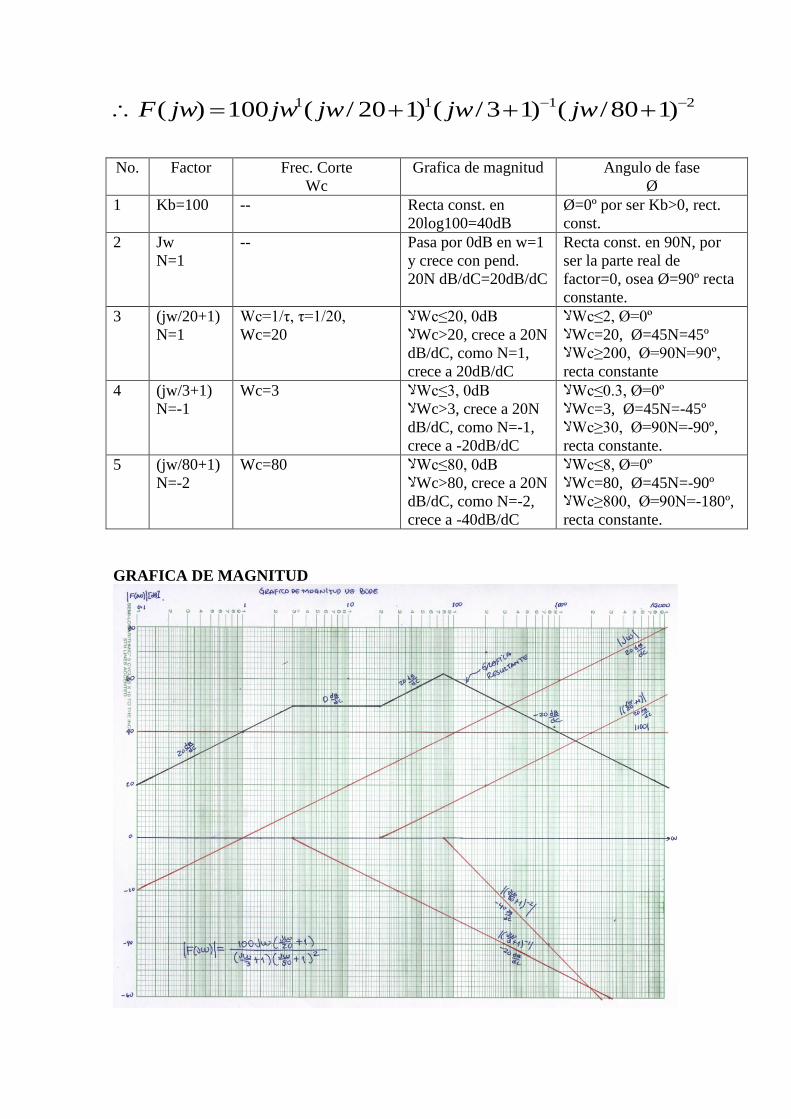
2111 )180/()13/()120/(100)( jwjwjwjwjwF
No. Factor Frec. Corte
Wc
Grafica de magnitud Angulo de fase
Ø
1 Kb=100 -- Recta const. en
20log100=40dB
Ø=0º por ser Kb>0, rect.
const.
2 Jw
N=1
-- Pasa por 0dB en w=1
y crece con pend.
20N dB/dC=20dB/dC
Recta const. en 90N, por
ser la parte real de
factor=0, osea Ø=90º recta
constante.
3 (jw/20+1)
N=1
Wc=1/τ, τ=1/20,
Wc=20
Wc≤20, 0dBال
Wc>20, crece a 20Nال
dB/dC, como N=1,
crece a 20dB/dC
Wc≤2, Ø=0ºال
Wc=20, Ø=45N=45ºال
,Wc≥200, Ø=90N=90ºال
recta constante
4 (jw/3+1)
N=-1
Wc=3 الWc≤3, 0dB
Wc>3, crece a 20Nال
dB/dC, como N=-1,
crece a -20dB/dC
Wc≤0.3, Ø=0ºال
Wc=3, Ø=45N=-45ºال
,Wc≥30, Ø=90N=-90ºال
recta constante.
5 (jw/80+1)
N=-2
Wc=80 الWc≤80, 0dB
Wc>80, crece a 20Nال
dB/dC, como N=-2,
crece a -40dB/dC
Wc≤8, Ø=0ºال
Wc=80, Ø=45N=-90ºال
,Wc≥800, Ø=90N=-180ºال
recta constante.
GRAFICA DE MAGNITUD
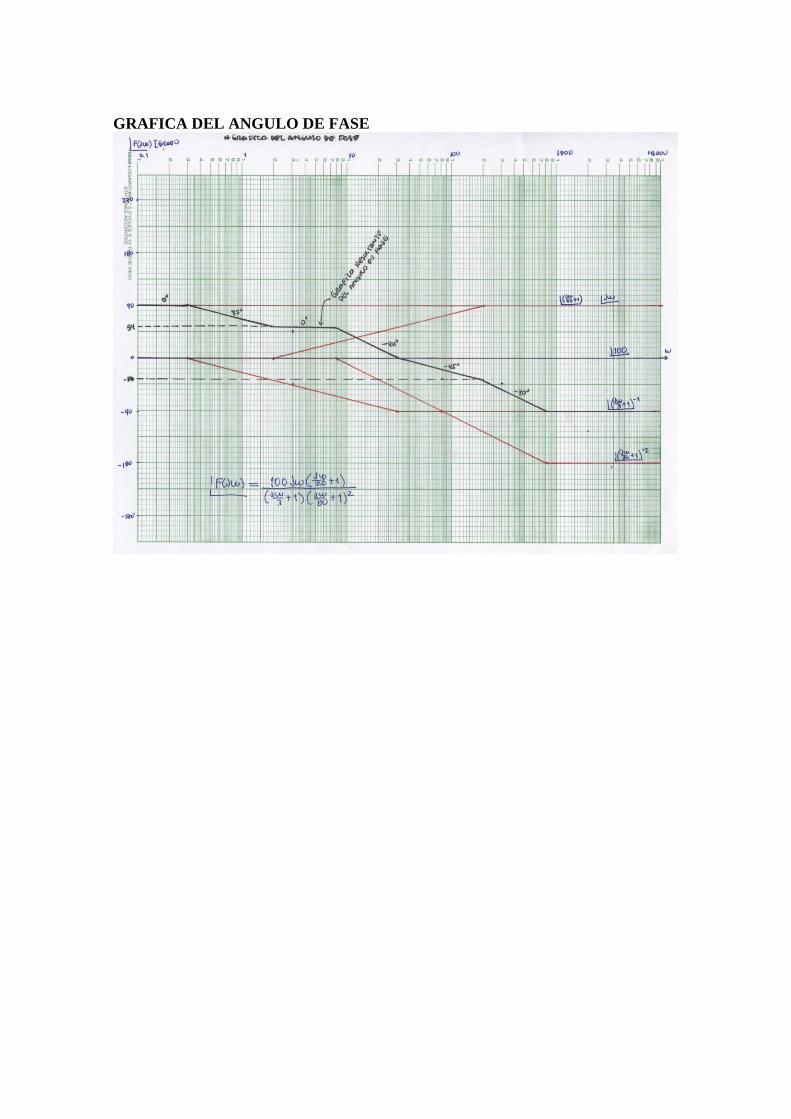
GRAFICA DEL ANGULO DE FASE
PRACTICA:
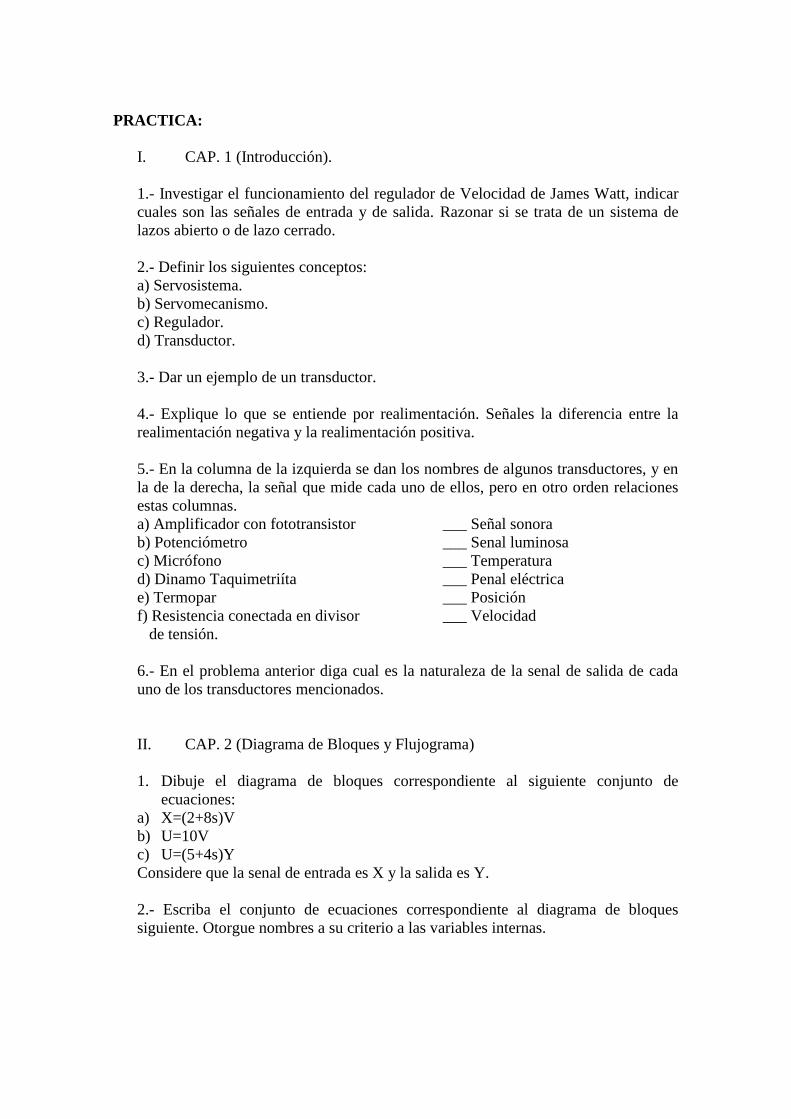
I. CAP. 1 (Introducción).
1.- Investigar el funcionamiento del regulador de Velocidad de James Watt, indicar
cuales son las señales de entrada y de salida. Razonar si se trata de un sistema de
lazos abierto o de lazo cerrado.
2.- Definir los siguientes conceptos:
a) Servosistema.
b) Servomecanismo.
c) Regulador.
d) Transductor.
3.- Dar un ejemplo de un transductor.
4.- Explique lo que se entiende por realimentación. Señales la diferencia entre la
realimentación negativa y la realimentación positiva.
5.- En la columna de la izquierda se dan los nombres de algunos transductores, y en
la de la derecha, la señal que mide cada uno de ellos, pero en otro orden relaciones
estas columnas.
a) Amplificador con fototransistor ___ Señal sonora
b) Potenciómetro ___ Senal luminosa
c) Micrófono ___ Temperatura
d) Dinamo Taquimetriíta ___ Penal eléctrica
e) Termopar ___ Posición
f) Resistencia conectada en divisor ___ Velocidad
de tensión.
6.- En el problema anterior diga cual es la naturaleza de la senal de salida de cada
uno de los transductores mencionados.
II. CAP. 2 (Diagrama de Bloques y Flujograma)
1. Dibuje el diagrama de bloques correspondiente al siguiente conjunto de
ecuaciones:
a) X=(2+8s)V
b) U=10V
c) U=(5+4s)Y
Considere que la senal de entrada es X y la salida es Y.
2.- Escriba el conjunto de ecuaciones correspondiente al diagrama de bloques
siguiente. Otorgue nombres a su criterio a las variables internas.
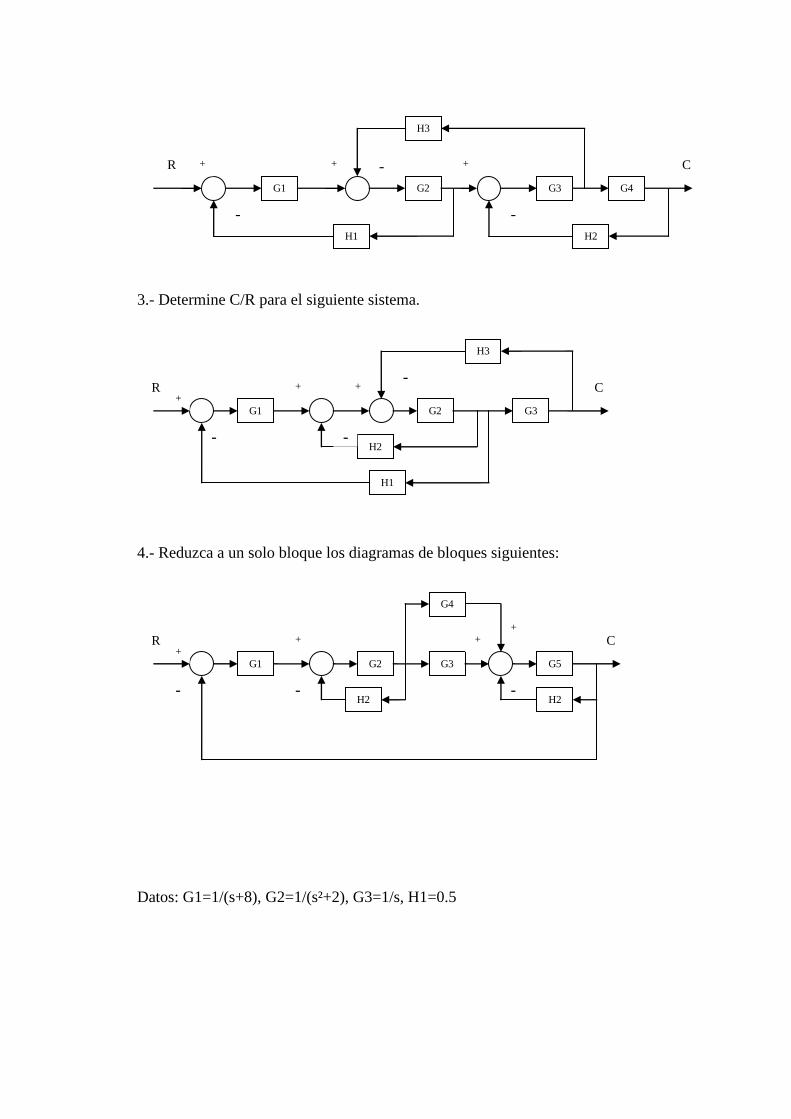
3.- Determine C/R para el siguiente sistema.
4.- Reduzca a un solo bloque los diagramas de bloques siguientes:
Datos: G1=1/(s+8), G2=1/(s²+2), G3=1/s, H1=0.5
G1 G2 G3
H2
G5
G4
R C +
- - -
+ + +
H2
G1 G2 G3 G4
H1 H2
H3
R C + + + -
- -
G1 G2 G3
H2
H1
H3
R C +
- -
- + +
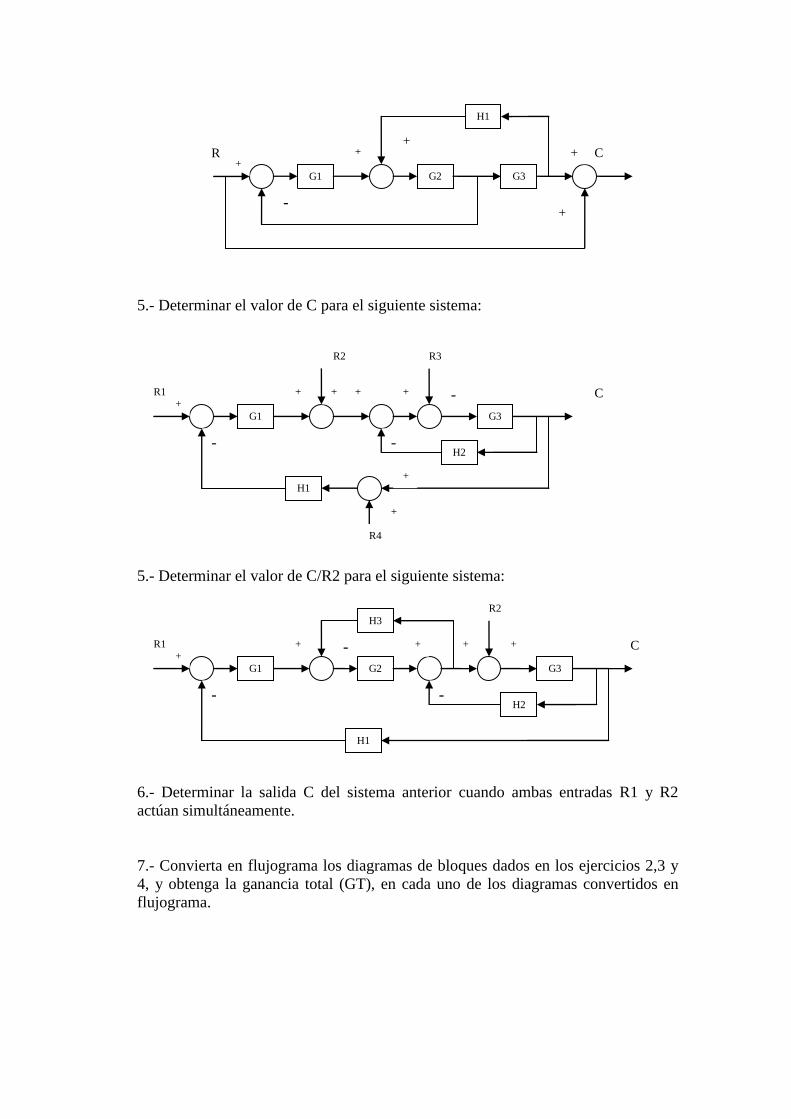
5.- Determinar el valor de C para el siguiente sistema:
5.- Determinar el valor de C/R2 para el siguiente sistema:
6.- Determinar la salida C del sistema anterior cuando ambas entradas R1 y R2
actúan simultáneamente.
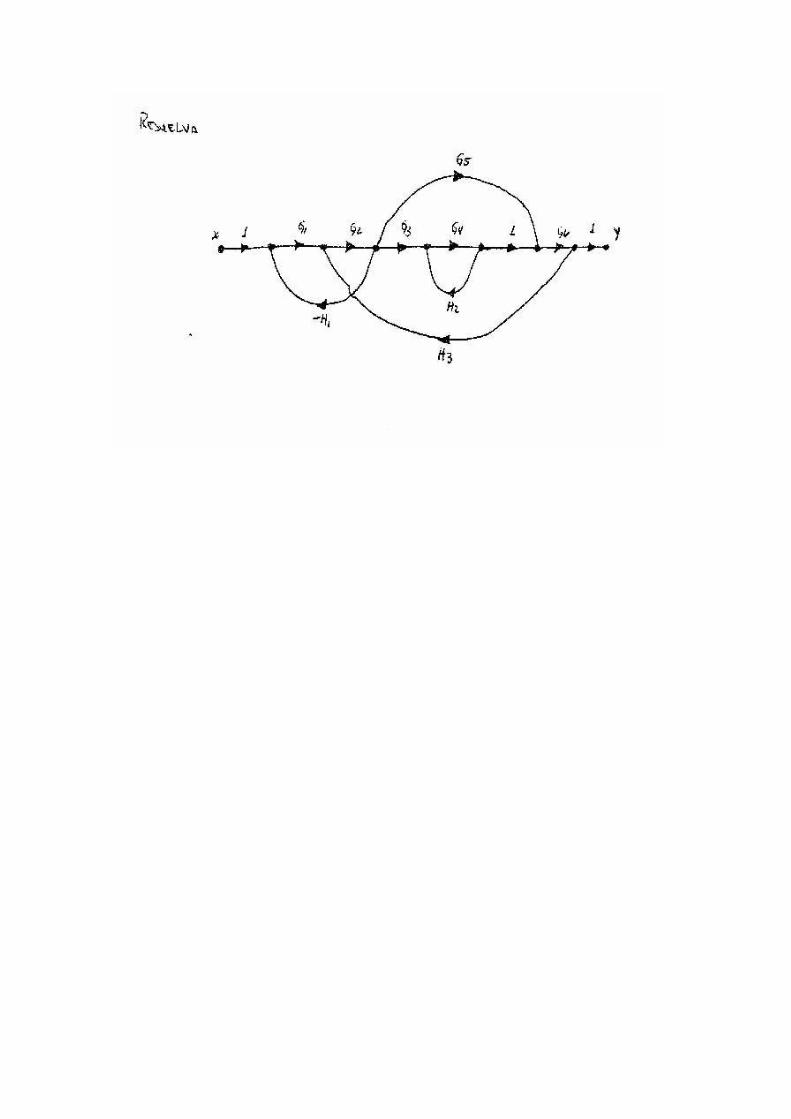
7.- Convierta en flujograma los diagramas de bloques dados en los ejercicios 2,3 y
4, y obtenga la ganancia total (GT), en cada uno de los diagramas convertidos en
flujograma.
G1 G3
H2
H1
R1 C +
- -
+ + + +
R2
G2
H3
-
G1 G3
H2
H1
R1 C +
- -
- + + +
R2 R3
R4
+
+
+
G2 G3 G1
H1
R C +
+ -
+ + +
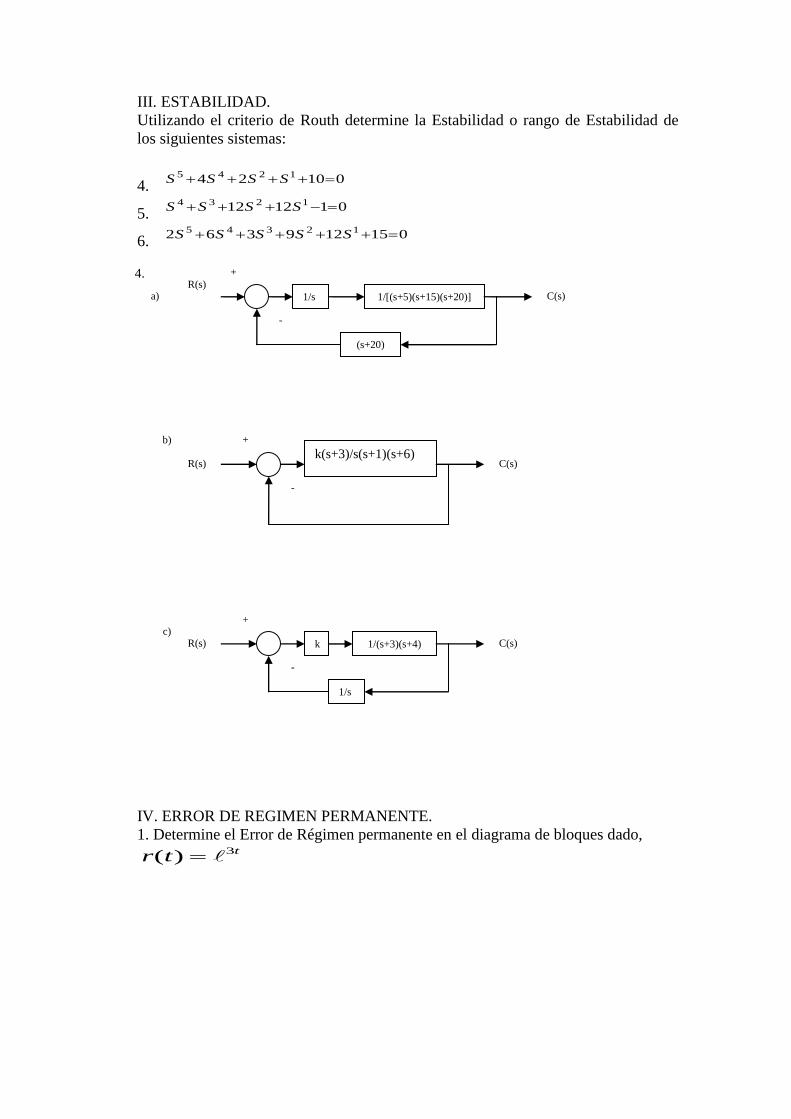
III. ESTABILIDAD.
Utilizando el criterio de Routh determine la Estabilidad o rango de Estabilidad de
los siguientes sistemas:
4. 01024 1245 SSSS
5. 011212 1234 SSSS
6. 015129362 12345 SSSSS
IV. ERROR DE REGIMEN PERMANENTE.
1. Determine el Error de Régimen permanente en el diagrama de bloques dado, ttr 3)(
4.
1/s 1/[(s+5)(s+15)(s+20)]
(s+20)
R(s) C(s)
+
-
a)
b) +
-
+
-
c)
k(s+3)/s(s+1)(s+6)
k 1/(s+3)(s+4)
1/s
R(s) C(s)
C(s) R(s)
2. Un Sistema con realimentación unitaria y negativa tiene una función de
transferencia de avance )3)(1(2
)2()(
sss
sksG y se le aplica una
entrada r(t)=0.5t². ¿Para que valores de k es el 75.0)( trp ?.
3. Dado el diagrama de bloques y la entrada mostrada, Determinar el Error de
Régimen permanente.
s²+2s+3 (s+10)/s R(s) C(s)
4/s 1/(s+10)(s+20) X(s) Y(s)
x(t)
y(t)
3
2
1
0
1 2 3
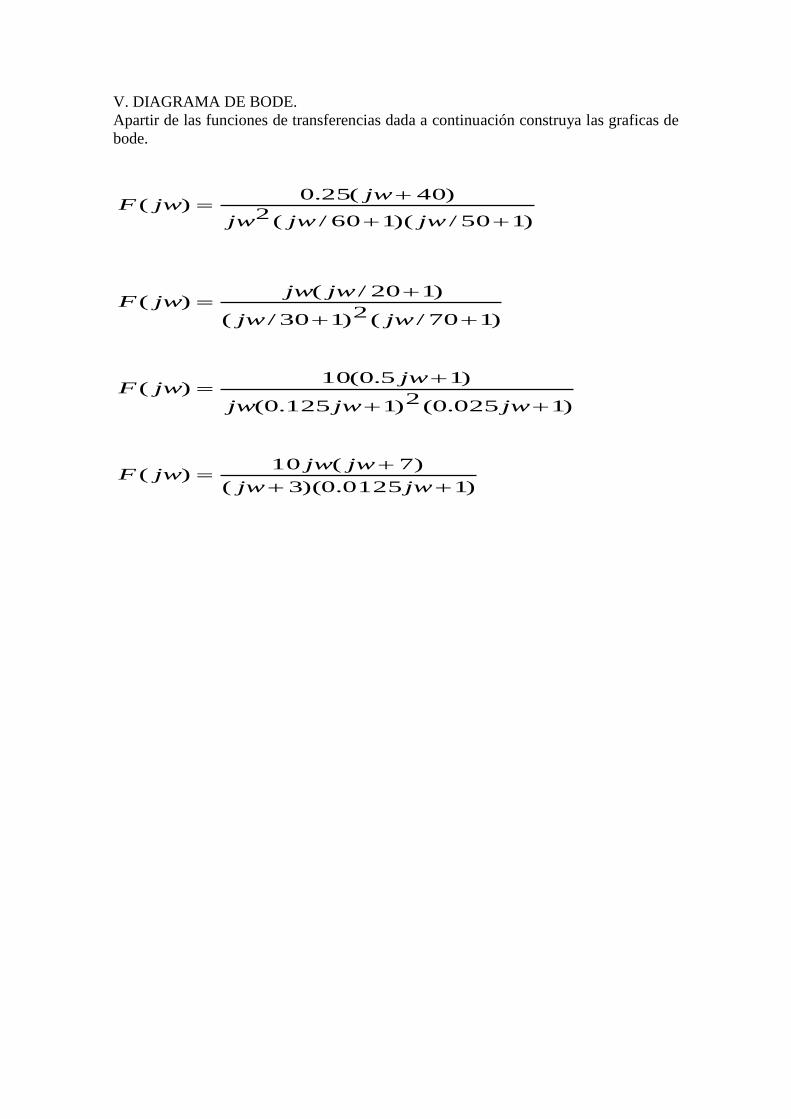
V. DIAGRAMA DE BODE.
Apartir de las funciones de transferencias dada a continuación construya las graficas de
bode.
)150/)(160/(2
)40(25.0)(
jwjwjw
jwjwF
)170/(2)130/(
)120/()(
jwjw
jwjwjwF
)1025.0(2)1125.0(
)15.0(10)(
jwjwjw
jwjwF
)10125.0)(3(
)7(10)(
jwjw
jwjwjwF