Materi Ajar Robotika
70
Materi Ajar : Pengantar Robotika (FSK 45311) 1 Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T MATERI AJAR PENGANTAR ROBOTIKA (FSK 45311) Disusun Oleh : Dr. Ir. Siti Nurmaini, M.T Ahmad Zarkasi, S.T, M.T JURUSAN SISTEM KOMPUTER FAKULTAS ILMU KOMPUTER UNIVERSITAS SRIWIJAYA 2013
-
Upload
ahmad-adja -
Category
Documents
-
view
475 -
download
129
description
Robotik
Transcript of Materi Ajar Robotika

Materi Ajar : Pengantar Robotika (FSK 45311)
1
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
MATERI AJARPENGANTAR ROBOTIKA (FSK 45311)
Disusun Oleh :Dr. Ir. Siti Nurmaini, M.TAhmad Zarkasi, S.T, M.T
JURUSAN SISTEM KOMPUTERFAKULTAS ILMU KOMPUTER
UNIVERSITAS SRIWIJAYA2013

Materi Ajar : Pengantar Robotika (FSK 45311)
2
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
BAB 1
PENDAHULUAN
1.1 Sejarah dan Perkembangan Robotika
Keunggulan dalam bidang teknologi robotika tidak dapat dipungkiri telah lama
menjadi ikon bagi negara-negara maju seperti Jepang, Korea Selatan, Amerika dan
banyak lagi. Bagi kota-kota modern belumlah lengkap jika dalam keseharian belum
dilengkapi dengan teknologi robotik. Robot adalah mesin yang dapat mengerjakan
beberapa tugas yang dapat dikerjakan manusia, yang bekerja secara otomatis atau
dengan kendali komputer. Robotika adalah bidang ilmu yang sedang berkembang
pesat dan memiliki masa depan besar. Dari robot manufaktur yang digunakan dalam
industri perakitan, robot terus berkembang seperti robot yang dapat melakukan
operasi, robot pengintai, robot penjinak bom dan robot domestik yang digunakan di
rumah tinggal. Robot telah dipercaya untuk membantu manusia menyelesaikan
pekerjaannya. Salah satu pekerjaan yang sering dilimpahkan kepada robot adalah
untuk mencapai tempat yang sulit atau tidak dapat dicapai oleh manusia. Misalnya
mencari konban daerah yang terkena gempa, kebakaran, atau kapal tenggelam.
Semua itu tidak terlepas dari berbagai riset robotik yang melibatkan pihak
universitas sebagai pelaku utama, yang hasil risetnya telah diaplikasikan dalam
berbagai segikehidupan masyarakatnya.
Gambar 1.1 Pertunjukan komedi berjudul RUR 1921

Materi Ajar : Pengantar Robotika (FSK 45311)
3
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Ilmu robotika memiliki sejarah yang panjang hingga saat ini. Kata robot
berasal dari bahasa Czech yaitu robotayang berarti pekerja, yang dipopulerkan oleh
seorang penulis berkebangsaan Czeck bernama Karl Capek dengan membuat sebuah
pertunjukan komedi berjudul RUR (Rossum,s Universal Robot) pada tahun
1921.RUR menceritakan tentang mesin yang menyerupai manusia yang memiliki
kemampuan bekerja secara terus-menerus tanpa lelah. Kemudian pada tahun 1926
sebuah film Metropolis yang dibuat di Jerman sempat dipamerkan dalam New York
World’s Fair 1939 yang mengisahkan tentang robot berjalan mirip manusia beserta
peliharaannya. Kemudian pada tahun 1977 sebuah film kolosal Star Wars yang
memperkenalkan karakter C3PO. Gambar 1.2 dibawah ini merupakan ilustrasi robot
C3PO dalam film star wars.
Gambar 1.2. Robot C3PO Star Wars
Pada awalnya robot dibuat untuk membantu pekerjaan manusia, akan tetapi
seiring berjalannya waktu, robot akan dapat menggambil alih posisi manusia secara
penuh dan bahkan menggantikan peran manusia dengan beragam jenisnya (Fu, el al,
1987). Juga menurut Fu materi ajar dan pengembangan pertama sebuah produk
robotik dimulai pada tahun 1940 –an ketika Argonne National Laboratories di Oak
Ridge Amerika, yang meperkenalkan sebuah mekanisme robotika yang dinamai
master-slave manipulator yang digunakan untuk menangani meterial radioaktif.

Materi Ajar : Pengantar Robotika (FSK 45311)
4
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Untuk jelasya dapat dilihat dalam Gambar 1.3 yang merupakan robot master-slave
manipulator.
Gambar 1.3. Master-slave manipulator robot
Mulanya aplikasi robotika tidak telepas dengan industri sehingga muncul
istilah industrial robot atau robot manipulator. Robot industri adalah robot tangan
(arm robot) yang diciptakan untuk berbagai keperluan dalam meningkatkan
produksi, memiliki lengan-lengan kaku yang terhubung secara seri dan memiliki
sendi yang berputar (rotasi), memanjang (prismatik) dan memendek. Begitu
diminatinya penggunaan robot manipulator ini, menyebabkan banyak perusahaan
besar menjadikan robot industri sebagai unggulan, seperti perusahaan elektronik dan
mobil. Gambar 1.4 dibawah ini merupakan robot manipulator.
Gambar 1.4. Robot manipulator

Materi Ajar : Pengantar Robotika (FSK 45311)
5
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Dewasa ini mungkin defenisi robot industri sudah tidak sesuai lagi karena teknologi
mobile robot juga sudah dipakai luas sejak awal 80-an. Seiring itu munculah istilah
robot humanoid (mirip manusia), animaloid (mirip binatang) bahkan industri luar
angkasa dan pertahanan juga telah mengaplikasikannya, sehingga robot manipulator
yang digunakan pada bagian tertentu saja.
1.2 Pengajaran Bidang Robotik
Seiring dengan majunya perkembangan penelitian di bidang robotik,
penerapan pengajaran matakuliah yang berkaitan dengan robotik semakin dinamis.
Robot tidak hanya masuk dalam dunia kendali tapi juga masuk kedalam berbagai
disiplin ilmu sain seperti fisika, matematika, telekomunikasi, mesin, komputer dan
bidang ilmu lainnya. Jika dulu ilmu robotik masuk dalam matakuliah sistem kontrol,
otomasi industri ataupun teknik mikroprosesor dan antarmuka, kini ilmu robotik
telah berdiri sebagai suatu disiplin ilmu malah menjadi domain kurikulum baru yang
didalamnya dengan berbagai disiplin ilmu. Sebagai contoh kemajuan di bidang
jaringan komputer dan internet melahirkan ide-ide seperti web based robotic.
Network based robotic yang memungkinkan para dokter dapat menjalankan operasi
jarak jauh dan memungkinkan suatu saat nanti setiap robot akan memiliki IP
tersendiri. Perkembangan lainnya adalah penelitian pesawat tanpa awak, robot
jelajah, robot perang maupun eksplorasi ruang angkasa yang telah dilakukan. Juga
perkembangan robot air (under-water) untuk eksplorasi bawah laut dan pertahanan.
Gambar 1.5 berikut ini merupakan gambar under-water robot dan playing robot.
Gambar 1.5. Plying dan under-water robot

Materi Ajar : Pengantar Robotika (FSK 45311)
6
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
1.3 Metode Pengajaran Ilmu Robotik
Cara klasik pengajaran ilmu robotik berdasarkan materi yang penuh dengan
analisis matematis mulai dari analisis kinematik, dinamik dan kontrol robot
manipulator menjadi hal utama dalam pengajaran robotik, atau mengawali belajar
robotik melalui robot manipulator.
Metode Braunl menerapkan pengajaran ilmu robotik yang langsung
menyentuh minat keingintahuan mahasiswa yaitu desain mobile robot. Materi yang
diberikan tidak lagi dimulai dari berbagai macam analisis matematis dan simulasi
komputer yang menurutnya kurang memberikan sentuhan kepada mahasiswa. Ia
langsung memperkenalkan bagaimana membuat mobile robot dengan salah satu
contoh robot soccer. Metode Braunl menekankan bahwa tugas robot adalah perkara
sangat bersifat praktis, real world hardware, dapat dilihat dan dirasakan langsung
dan sering kali dalam desain robot tidak memerlukan analisa matematis secara
sempurna seperti dalam simulasi komputer.
Jadi berdasarkan dua metode pembelajaran diatas, kita dapat memilih metode
mana yang sesuai dengan disipiln ilmu yang kita miliki dan situasi apa yang kita
hadapi didalam kelas. Misalnya untuk disiplin ilmu komputer yang sehari-hari selalu
menggunakan algoritma pemrograman dapat menggunakan metode yang kedua,
karena ketelitian analisi hardware tidak langsung dirasakan mahasiswa. Dan
sebaliknya disiplin ilmu sain murni seperti mesin, elektro ataupun fisika sangat perlu
dalam mengenalkan analisis matetatis dalam desain robot.
1.4 Penelitian di Bidang Robotik
Ilmu robotik memiliki unsur yang sedikit berbeda dari cabang ilmu-ilmu
dasar maupun terapan dalam perkembangannya. Ilmu dasar biasanya berkembang
dari suatu asas atau hepotesa yang kemudian diteliti secara metodis. Ilmu terapan
dikembangkan setelah ilmu-ilmu yang mendasarinya berkembang dengan baik.
Sedangkan ilmu robotik pada awalnya berkembang memalui pendekatan praktis,
kemudian dengan suatu pendekatan atau perumpamaan (asumsi) dari hasil
pengamatan mahluk hidup atau mesin bergerak lainnya dikembangkan penelitian

Materi Ajar : Pengantar Robotika (FSK 45311)
7
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
secara teoritis. Dari teori kembali kepada praktis dan darisinilah robot berkembang
menjadi lebih canggih.
Ada 4 komponen dalam ruang lingkup penelitian dalam bidang robotik yang
salaing berhubungan yaitu klasifikasi robot, obyek penelitian, fokus penelitian dan
target penelitian. Perkembangan penelitian robotik dimulai dari kalsifikasi robot.
Kalsifikasi ini terdiri dari,
1. Robot non-mobile yang bersifat statis, tidak berpindah dari satu posisi ke
posisi lain. Robot jenis ini dikategorikan sebagai robot manipulator, yang
ruang kerjanya hanya sebatas jangkauan lengannya saja.
2. Robot mobile yang bersifat dinamis, yang memiliki kemampuan berpindah
dari suatu posisi ke posisi lainnya. Robot ini masuk dalam kategori robot
beroda, berkaki dan terbang. Ruang kerjanya cenderung tidak terbatas
bergantung pada ruang jelajahnya dan power yang dimilikinya.
3. Robot kombinasi antara no- mobile dan mobile, yang memiliki kemampuan
jelajah dan manipulator. Robot jenis ini memiliki ruang kerja yang relatif
tidak terbatas.
4. Robot yang meniru bentuk dan kemampuan mahluk hidup (humanoid dan
anaimaloid). Robot ini sering digunakan untuk keperluan riset yang lebih
khusus dan juga dengan kwbutuhan waktu yang relatif lama. Robot ini
dirancang untuk membantu para periset di bidang lain unutk mempelajari
sturktur dan karakter dari suatu mahluk hidup dan kadang-kadang digunakan
untuk penjelajahan yang sulit dijangkau oleh manusia. Misalnya penjelajahan
luar angkasa dan dasar samudra.
Selanjutnya adalah pada obyek Penelitian, yang mana pada bagian ini robot
dikelompokkan dalam beberapa obyek yang pertama robot arm yang kemampuan
teknologinya dilihat dari berapa banyak siku yang dimiliki, beban kerja, waktu
eksekusi, tingkat ketelitian dan akurasi. Kedua adalah robot beroda yang memiliki
tipe holonomic dan non-holonomic, kemudian berkaki dengan perbandingan
banyaknya kaki dan DOF. Ketiga adalah mobile manipulator dan walking robot
dengan manipulator. Dan yang keempat underwater robot digunakan untuk

Materi Ajar : Pengantar Robotika (FSK 45311)
8
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
eksploitsai bawah laut serta flying robot untuk keperluan pemetaan dan navigasi
udara.
Fokus penelitian menitik beratkan pada kecerdasan buatan yang meliputi
fuzzy logic, neural network, genetic algorithem, adaptive learning dan knowladge
based. Kedua berfokus pada analisis kinematik yang berhubungan dengan kontrol
pergerakan, analisis dinamik yang berhubungan dengan pemodelan dinamik. Ketiga
berfokus pada teknologi prosesor (mikroprosesor/mikrokontroler, FPGA, PLC dll),
teknologi sensor (vision, cahaya, jarak dll) serta teknologi aktuator (torsi).
Target penelitian merupakan bagian akhir dari sturktur penelitian bidang
robotik. Bagian ini dapat diketahui tujuan atau target yang akan diteliti misalnya
sistem navigasi, pemetaan, swarm, penghindar halangan, pengamatan dan lainnya.
Berikut ini adalah gambaran hubungan dari domain penelitian dalam bidang
robotika.
Gambar 1.6. Domain penelitian robotik
1.5 Robot dari Sudut Pandang Mekatronik
Mekatronik adalah istilah perpaduan antara mekanik dan elektronik.
Mekatronik belum tentu robot namun robot merupakan bagian dari mekatronik.
Mekatronnik sendiri terdiri dari 4 disiplin ilmu yaitu mekanik (mesin), elektronik,
teknik kontrol berbasis komputer (algoritma pemroraman). Gambar 1.7
mengilustrasikan mekatronik berdasarkan disiplin ilmu yang menaunginnya.

Materi Ajar : Pengantar Robotika (FSK 45311)
9
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 1.7 Irisan pada Bidang Ilmu Mekatronik
Mekatronik secara tidak langsung telah digunakan dalam kehidupan sehari-
hari kita, misalnya mesin cuci, DVD player, hingga vacum cleaner. Dalam dunia
otomotif kita mengenal mobil yang dilengkapi dengan sistem auto driver, ABS dsb.
Dalam perkembangannya mekatronik juga mengambil bagian dalam bidang ilmu
kontrol cerdas, sehingga muncul istilah intelligent mechatronics yang dimaksudkan
untuk mendeskripsikan produk mekatronik yang menggunakan kecerdasan buatan.
Sebagai contoh mensin cuci yang dilengkapi dengan kontrol fuzzy, mesin penjual
minuman yang dilengkapi dengan sistem validasi menggunakan metode jaringan
saraf triuan.
Berikut merupakan salah satu aplikasi fuzzy logic pada mesin cuci. Model
yang maksudkan disini adalah simulasi dari pengaturan kecepatan motor pada mesin
cuci dengan menggunakan fuzzy logic, dengan fuzzy logic kita dapat mengontrol
motor dengan toleransi yang bisa kita tentukan, sehingga dapat ditentukan berapa
berapa rate yang harus ditentukan untuk menentukan seberapa kecepatan motor
mesin cuci tersebut, Gambar 1.8 merupakan blok diagram sistem.

Materi Ajar : Pengantar Robotika (FSK 45311)
10
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Fuzzy logic Plant
Sensor
-
+set point v3
v2
v4
Beban
Dirty
Fuzzy logic
Gambar 1.8. Blok digram sistem fuzzy logic
Dari gambar 1.8 dapat dijelaskan sebagai berikut:
1. Setpoint adalah bagian dari model simulasi dimana kita bisa memberi masukan
dengan nilai tertentu pada model tersebut sehingga dapat dihasilkan keluaran
tertentu. Masukan berupa beban dan kekeruhan air pada mesin cuci yang
prosesnya memggunakan fuzzy logic.
2. Blok fuzzy logic adalah bagian dari model simulasi yang berfungsi untuk
mengontrol plant (motor mesisn cuci).
3. Blok plant adalah bagian dari model yang merupakan sistem yang akan
dikendalikan oleh fuzzy logic.
4. Blok sensor akan mendeteksi sinyal keluaran sistem, yang berfungsi untuk
memberikan umpan balik ke st point sistem. Hasilnya dapat berupa error (+) atau
error (-).
5. Error disini dapat dikatakan selisih antara nilai setpoint dan umpan balik
masukan. Jika bernilai positif maka v2 akan di kurangi dan jika bernilai negatif
maka v2 akan ditambah. Untuk kendali yang ideal maka error harus benilai nol
(0).
1.6 Robotik dari Sudut Pandang Bio Science
Dalam dekade terakhir ini penelitian bidang robotik pada bidang bio science
juga semakin maju. Misalnya dalam dunia kedokteran telah dikenal istilah teknik
kloning mahluk hidup, maka dalam robotik juga dikenal istilah implan
sensor/actuator atau implat interface. Interface berupa chip berukuran mikro yang
ditanamkan kedalam tubuh mahluk hidup dengan tujuan agar komputer dapat

Materi Ajar : Pengantar Robotika (FSK 45311)
11
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
mengendalikan dan memonitor kegiatan saraf organik mahluk hidup secara langsung
dalam pembuluh darah. Metode ini juga bermanfaat untuk mendeteksi penyakit
kanker pada manusia, sehingga dapat ditanggulangi lebih awal. Gambar 1.9 berikut
adalah salah satu aplikasi bio science robotik pada tubuh serangga.
Gambar 1.9. Aplikasi bio science pada serangga
Pada gambar 1.9 terlihat tubuh serangga ditanamkan chip dan sensor yang bertujuan
untuk mempelajari, mengendalikan, atau mengetahui karakteristik dari serangga
tersebut. Baik itu berupa sistem pergerakan, komunikasi antar serangga, pola terbang
dan banyak lainnya.
1.7 Otomasi dan Robot Industri
Otomasi di defenisikan sebagai teknologi yang berdasarkan pada aplikasi
sistem mekanik, elektronik dan komputer. Secara umum otomasi dapat
dikelompokkan dalam 3 kategori yaitu.
1. Otomasi Tetap
Otomasi tetap dapat diartikan suatu mesin otomatis yang dibuat hanya untuk
satu keperluan saja (spesifikasi khusus), tidak dapat digunakan untuk produk
lain, sesuai untuk keperluan masal dengan kecepatan tinggi dengan investasi
awal yang tinggi namun biaya operasional yang rendah. Prosesor yang
digukanan biasanya menggunakan single processor yang berorientasi pada
prosesor hardware.

Materi Ajar : Pengantar Robotika (FSK 45311)
12
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
2. Otomasi semi tetap
Otomasi semi tetap adalah suatu mesin yang dibuat untuk keperluan produksi
untuk satu tugas saja, namun dalam beberapa parameter (ukuran, bentuk dsb)
dapat diatur secara terbatas. Prosesor yang digunakan biasanya aplications
processor yang dirancang khusus untuk menjalankan tugas tertentu yang
memiliki karakteristik khusus.
3. Otomasi fleksible
Otomasi fleksible adalah perangkat mesin yang dibuat dapat digunakan untuk
berbagai produk yang sifatnya menyeluruh, bagian-bagian produk dapat
diproduksi pada waktu yang bersamaan. Teknologi prosesor yang
ditanamkan biasanya menggunakan general processor yang dirancang untuk
melakukan banyak tugas. Robot adalah salah satu pendukung dalam ketegori
ini. Misalnya arm robot dalam sistem CIM (computer integrated
manufacturing) pada konveyor.
1.8 Sistem Kontrol Robotik
Pada dasarnya sistem kontrol robotik terbagi atas dua kelompok yaitu sistem
kontrol terbuka (open loop) dan sistem kontrol tertutup (closed loop). Berikut adalah
Gambar 1.10 sistem kontrol terbuka.
Gambar 1.10. Sistem kontrol lingkar terbuka
Sistem kontrol terbuka atau umpan maju dapat dinyatakan sebagai sistem kontrol
yang keluarannyanya tidak diperhitungkan ulang oleh kontrol, dengan kata lain
keluaran tidak diumpan balik ke masukkan sistem. Keluaran langsung dihasilkan
untuk diambil tindakan. Keadaan apakah robot benar-benar telah menjacapai target
seperti yang diinginkan tidak mempengaruhi kinerja kontrol. Keadaan masukkan
langsung dapat dirasakan oleh aktuator dengan melakukan tindakan sesuai perintah

Materi Ajar : Pengantar Robotika (FSK 45311)
13
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
kontroler. Misalnya motor stepper tidak perlu dipasang sensor pada porosnya untuk
mengetahui posisi akhir robot. Contoh dari aplikasi system seperti ini adalah robot
line tracking, robot akan mengikuti jalur hitam putih sesuai logika program pada
kontroler. Robot akan terus berjalan sampai catu daya dimatikan. Sistem lingkar
terbuka sering di sebut juga kontrol sekuensial (berurutan berdasarkan delay) yang
beropersai sesuai urutan logika program yang diberikan. Gambar 1.11 merupakan
gambar diagram blok sistem lingkar tertutup.
Gambar 1.11. Sistem kontrol lingkar tertutup
Sistem kontrol lingkar tertutup adalah suatu sistem kontrol yang keluarannya
dapat terus dikoreksi oleh pengendali dengan cara mengirimkan sinyal keluaran ke
pin masukkan. Data yang diterima akan diproses lebih lanjut untuk memperbaiki
sistem yang ada. Jika tindakan berlebih maka akan dikurangi dan jika tindakan
kurang dari referensi maka akan ditambah sesuai kebutuhan. Gambar 1.12 dibawah
ini merupakan gambar blok sistem kontrol tertutup.
Gambar 1.12. Mobile robot dengan sensor

Materi Ajar : Pengantar Robotika (FSK 45311)
14
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Pada Gambar 1.12 diatas merupakan contoh penerapan kontrol terbuka pada
mobile robot. Pada masing-masing motor robot dipasang sebuah sensor encoder
yang berfungsi sebagai pendeteksi gerakan rotor robot. Jika hasil gerak aktuator
telah sama dengan referensi makan masukkan (set point), maka kontroler akan nol,
artinya kontroler tidak lagi memberikan sinyal koreksi aktuasi pada robot karena
target kestabilan telah diperoleh. Makin kecil error makin kicil juga sinyal kontrol
terhadap robot sampai akhirnya mencapai kondisi stabil. Kontrol sekuensial juga
dapat diterapkan pada kontrol tertutup misalnya dengan urutan kerja robot menuju
posisi obyek, kemudian mengabil obyek, dilanjutkan mengangkat dan memindahkan
obyek dan yang terakhir mencapai posisi tertentu.
1.9 Interaksi Manusia dan Robot
Kehadiran robot dalam kehidupan manusia makin hari disadari makin banyak
manfaatnya. Seperti penjelasan diatas robot dapat membantu dalam menjalankan
pekerjaan rumah tangga seperti mencuci, menghisap debu, memasak dal banyak lagi
tugas yang dapat dilakukan oleh robot. Interaksi antara manusia dan robot dapat
dinyatakan dalam 3 tingkatan, yaitu
1. Manusia sebagai kontroler robot sepenuhnya
2. Manusia sebagai manager dari operasi robot
3. Manusia dan robot berada dalam kesetaraan
Interaksi yang paling dasar antara manusia dengan robot adalah interaksi yang
menempatkan manusia sebagai kontrol pergerakan robot sepenuhnya. Hal ini dapat
ditunjukkan dalam Gambar 1.13. Dalam gambar tersebut terlihat manusia berperan
penuh dalam kendali pergerakan robot dengan menggunakan remote kontrol. Mata
manusia berfungsi sebagai sensor vision, sedangkan tangan berfungsi sebagai
pemberi sinyal kontrol kepada aktuator. Sebagai contoh yang paling sederhana
adalah permainan mobil remote yang banyak terdapat dipasaran. Kendali navigasi
mobil deperankan oleh anak-anak yang sedang bermain mobil remote.

Materi Ajar : Pengantar Robotika (FSK 45311)
15
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 1.13. Manusia sebagai kendali robot
Dalam dunia industri, robot manual juga sering kita jumpai pada bagian
pemindahan barang. Manusia yang bertindak sebagai operator menggerakan robot
manipulator untuk memegang, mengangkat dan memindahkan barang dari satu
posisi ke posisi lain. Panel kontrol yang dipegang operator merupakan tombol-
tombol pengontrol seluruh pergerakan robot. Robot jenis remote kontrol biasanya
digunakan untuk tugas yang rumit dan daerah yang berbahaya bagi manusia. Contoh
aplikasinya dalam peralatan militer sebagai robot penjinak bom. Prosesnya dapat
dilihat dalam Gambar 1.14 dibawah ini.
Gambar 1.14. Manusia sebagai kendali robot
Pada tingkat selanjutnya manusia bertindak sebagai manajer bagi robot.
Tugas secara detail dilakukan oleh robot tersebut, sedangkan tugas secra keseluruhan

Materi Ajar : Pengantar Robotika (FSK 45311)
16
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
diatur oleh operator. Tentu robot seperti ini telah dimuati dengan kemampuan
kontrol otomatis ataupun juga telah diberikan suatu algoritma kecerdasan buatan
dengan cara memberikan prosesn pembelajaran pada robot. Contoh robot dalam
kategori ini adalah penentuan trajektori dari suatu manipulator. Operator dapat
memprogram secara off-line. Gerakan ujung lengan dilatih dengan
menggerakkannya secara manual menuju sasaran. Pada saat yang sama kontroler
merekam trajektori ini, setelah proses pelatihan selesai maka robot akan bekerja
sendiri. Contoh lainnya adalah robot catur manipulator. Robot ini diajarkan unutk
merespon setiap langkah dalam permainan catur. Tentu saja robot telah diprogram
dengan algoritma catur Gambar 1.15 berikut merupakan contoh robot catur.
Gambar 1.15 Robot catur
Konteks interaksi manusia dengan robot dalam kesetaraan adalah manuasia
sebagai tuan dan robot sebagai pembantu. Manusia yang memiliki segala kelebihan
dari robot tentu juga memiliki keterbatasan dalam beberapa hal, tentu kolaborasi
antara manusia dan robot memiliki manfaat yang luar biasa, karena manusia berada
pada posisi tuan makan manuasia dapat membuat robot menjadi cerdas dalam
konteks yang terbatas, seperti untuk sistem navigasi dan manipulasi gerak yang
diajarkan pada robot. Sedangkan tugas apa yang harus dikerjakan robot akan
diarahkan oleh manusia melalui interaksi dan komunikasi. Jadi robot harus diprgram
agar mampu berinteraksi dengan manusia. Prosedur dan media interaksi dapat
berupa sinyal frekuensi radio, suara, gambar, sentuhan tangan dan sebagainya.

Materi Ajar : Pengantar Robotika (FSK 45311)
17
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
BAB 2
TEKNIK DISAIN SISTEM ROBOTIK
2.1 Pendahuluan
Teknik desain suatu sistem robotik sangatlah diperlukan dalam belajar ilmu
robotik. Desain yang handal dan sederhana tentu akan menghasilkan kualitas robot
yang baik. Untuk robot mobile (bergerak) desain terletak pada peletakan motor, bodi
dan sensor akan sangat berpengaruh pada gerak robot. Robot berkaki memiliki
tingkat kerumitan yang besar dalam hal disain bodi, keseimbangan, kaki dst. Dalam
bagian ini akan dibahas teknik disain robot yang bersifat praktis, karena pendekatan
pemodelan yang terlalu rumit dapat melemahkan semangat mahasiswa dalam belajar
robotik. Biasanya mahasiswa dalam memulai belajar robotik selalu menginginkan
aplikasi yang sederhana dan langsung memfungsikannya dalam program yang
aplikasi dan efektif.
Teknik desain suatu robot berdasarkan manfaat bertujuan untuk mengetahui
fungsi dari robot yang akan dibuat. Misalnya robot pengikut garis, yang dapat
ditambahkan aplikasikan untuk memindahkan barang yang ada digudang. Kemudian
robot pemadam api, yang dapat ditambahkan aplikasikan untuk mendeteksi titik api
pada daerah bencana, dan banyak lagi lainnya. Jadi dalam setiap desain robot kita
tahu manfaat dan tujuan dari robot tersebut.
Ultrasonic 1
Ultrasonic 8
SLAVE MCUPic1684a 1
SLAVE MCUPic1684a 8
MASTERMCU
AT89x55
SLAVE MCU Pic1684a
Driver servo
ServoLeft
Servo Right
Robot Mobile Position
ObstaclePosition
Gambar 2.1. Diagram blok perancangan robot penghindar halangan

Materi Ajar : Pengantar Robotika (FSK 45311)
18
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Mengetahui prinsip dalam merancang sebuah robot sangatlah penting
terutama dari segi efisiensi, kehandalan dan mudah dipahami. Hal ini akan
menghasilkan keluaran komersial yang pada gilirannya akan mudah dideskripsikan
jika mahasiswa mulai ahli dalam mencipkatan robot. Gambar 2.1 berikut merupakan
diagarm sistem robot yang berhubungan dengan dunia nyata.
Dari gambar diatas, bagian blok diagram dapat dikelompokan dalam beberapa
kategori, yaitu
1. Sistem kontroler
Sistem kontroler adalah sistem yang berfungsi sebagai pemroses data
masukan dan keluran. Sebuah sistem kontroler minimal memiliki rangkaian
prosesor, rangkaian pengkondisi sinyal dan dilengkapi dengan rangkaian
display yang berguna untuk menampilkan data.
2. Mekanik Robot
Mekanik robot adalah sistem mekanik yang minimal terdiri dari sebuah
fungsi penggerak. Jumlah fungsi penggerak disebut sebagai derajat
kebebasan. Sebuah fungsi yang diwakili oleh sebuah sendi disebut sebagai
satu DOF. Sedangkan derajat kebebasan pada struktur roda dan kaki diukur
berdasarkan fungsi holonomic dan non-holonomic.
3. Sensor
Sensor adalah komponen yang berfungsi mendeteksi gerakan atau fenomena
lingkungan yang diperlukan oleh sistem kontroler sebagai masukan. Sensor
juga dapat berupa komponen yang merubah suatu besaran fisis ke besaran
elektris.
4. Aktuator
Aktuator adalah perangkat elektromekanik yang menghasilkan daya gerakan.
Dapat dibuat dari sistem motor listrik, sistem pneumatik dan sistem hidrolik.
5. Sistem Gerak
Adalah sistem mekanik yang dapat memindahkan robot dari suatu posisi ke
posisi lain. Sistem gerak dibai atas tiga ketegori yaitu sistem roda, sistem
kaki dan sistem tangan atau sendi.

Materi Ajar : Pengantar Robotika (FSK 45311)
19
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
6. Daerah Kerja
Daerah kerja (workspace) adalah didefenisikan sebagai daerah opersional
robot pada dunia nyata. Robot yang manipulator memiliki daerah kerja sesuai
dengan jankaian tangannya. Untuk robot beroda dan berkaki daerah kerja
tergantung pada medan jelajahnya
2.2 Rangkaian Kontroler Berbasis Prosesor
Seperti penjelasan diatas, sistem kontroler merupakan rangkaian prosesor
yang mengatur jalannya data, baik data masukan maupun data keluaran yang sesuai
dengan fungsi robot tersebut. Suatu rangkaian prosesor harus memiliki unit CPU,
rangkaian pengkondisi sinyal (baik ADC maupun DAC), sensor dan aktuator.
Prosesor pada robot dapat berupa mikroprosesor/mikrokontroler, FPGA, PLC dan
personal komputer.
2.2.1 Mikroprosesor/Mikrokontroler
Mikroprosesor/mikrokontroler adalah suatu sistem komputer yang
diaplikasikan dalam satu chip (untuk selanjutnya mikroprosesor disebut
mikrokontroler). Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu
komputer, mikrokontroler dibangun dari elemen-elemen dasar yang sama, seperti
kontrol unit (CPU), sistem bus, masukkan keluaran (I/O), siklus mesin (clock), dan
media penyimpan (memori). Secara sederhana, komputer akan menghasilkan
keluaran spesifik berdasarkan masukan yang diterima. Seperti umumnya komputer,
mikrokontroler juga mengerjakan instruksi-instruksi yang diberikan kepadanya.
Mikrokontroler dirancang hanya untuk menjalankan suatu aplikasi tertentu
saja. Program aplikasi ini menginstruksikan mikrokontroler untuk melakukan
serangkaian eksekusi dalam urutan tertentu. Gambar 2.2 merupakan gambar
arsitektur mikrokontroler standar.

Materi Ajar : Pengantar Robotika (FSK 45311)
20
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 2.2 Arsitektur umum mikrokontroler.
2.2.2 Central Processing Unit (CPU)
CPU adalah otak dari suatu komputer dan unit kontrol yang mampu mengatur
jalannya program. CPU bertugas mengontrol komputer sehingga terjadi sinkronisasi
kerja antar komponen dalam menjalankan fungsi-fungsi operasinya. CPU
bertanggung jawab mengambil dan memproses intruksi-intruksi dari memori utama
dan menentukan jenis instruksi tersebut. Bila ada instruksi untuk perhitungan
aritmatika atau perbandingan logika, maka unit kendali akan mengirim instruksi
tersebut ke ALU. Hasil dari pengolahan data dibawa oleh unit kendali ke memori
utama lagi untuk disimpan, dan pada saatnya akan disajikan ke alat keluaran.
Gambar 2.3 merupakan gambar CPU sederhana.
Dengan demikian fungsi dari unit kendali ini adalah :
o mengatur dan mengendalikan alat-alat masukan dan keluaran,
o mengambil instruksi-instruksi dari memori utama,
o mengambil data dari memori utama (jika diperlukan) untuk diproses,
o mengirim instruksi ke ALU bila ada perhitungan aritmatika atau perbandingan
logika serta mengawasi kerja dari ALU,
o menyimpan hasil proses ke memori utama.

Materi Ajar : Pengantar Robotika (FSK 45311)
21
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 2.3 Blok diagram CPU.
2.2.3 Sistem Masukkan/Keluaran (I/O)
Sistem I/O dalam mikrokontroler umumnya digunakan untuk berinteraksi
dengan perangkat luar. Hampir semua masukan mikrokontroler hanya dapat
memproses sinyal digital dengan tegangan yang sama dengan tegangan logika dari
sumber. Untuk masukan dengan level tegangan analog yang bervariasi, biasanya
tegangan tersebut harus di konversikan terlebih dahulu kedalam sinyal digital.
Karena itu terdapat piranti masukan yang dapat mengkonversikan sinyal analog
menjadi sinyal digital sehingga mikrokontroler dapat mengerti dan memprosesnya.
PB0PB1PB2PB3PB4PB5PB6PB7
12345
876
PC0PC1PC2PC3PC4PC5PC6PC7
2223242526272829
PA0PA1PA2PA3PA4PA5PA6PA7
PD0PD1PD2PD3PD4PD5PD6PD7
4039383736353433
1415161718192021
XTAL1
XTAL2
RST GND
1312
9
+5V10pF
+5 V+5 V
ATMEGA8535
IN1
IN2
EN
DRIVER L298D
OUT1
OUT2
Motor Buka
Motor Tutup
MOTOR DC
Sensor PIR
16MHz
30pF 30pF
Out5 V
Gambar 2.4 Sistem I/O

Materi Ajar : Pengantar Robotika (FSK 45311)
22
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Ada beberapa mikrokontroler yang telah menyediakan piranti ADC secata
terpadu dalam sistemnya, diantaranya mikrokontroler PIC dan AVR. Gambar 2.4
dibawah ini merupakan aplikasi I/O. Sistem mikrokontroler mempunyai keluaran
yang jauh lebih sederhana seperti lampu indikator atau beeper. Frasa kontroler dari
kata mikrokontroler memberikan penegasan bahwa alat ini mengontrol sesuatu.
Keluaran mikrokontroler adalah berupa sinyal digital. Sinyal digital ini dapat
langsung digunakan untuk perangkat keluaran digital, sedangkan untuk perangkat
keluaran analog, maka sinyal digital tersebut harus dikonversikan terlebih dahulu
kedalam sinyal analog. Piranti yang dapat melakukan konversi ini disebut dengan
Digital to Analog Converter (DAC).
2.2.4 Memori
Memori adalah media penyimpan data dan program dalam suatu
mikrokontroler. Baik itu media penyimpan sementara (temporary) maupun
permanen. Ada dua tipe dari memori yang digunakan dalam sistem mikrokontroler,
yaitu tipe Read Only Memory (ROM) dan Random Access Memory (RAM). ROM
digunakan sebagai media penyimpan program dan data permanen yang tidak dapat
berubah meskipun tidak ada catu daya yang diberikan. RAM digunakan sebagai
tempat penyimpan data sementara dan hasil kalkulasi selama proses operasi. Data
pada RAM akan hilang jika catu daya yang diberikan padam. Beberapa
mikrokontroler mengikutsertakan beberapa tipe lain dari ROM seperti Erasable
Programmable Read Only Memory (EPROM) dan Electrically Erasable
Programmable Read Only Memory (EEPROM).

Materi Ajar : Pengantar Robotika (FSK 45311)
23
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 2.5. Arsitektur memori mikrokontroler.
2.2.5 Siklus Mesin (Clock)
Siklus mesin (clock ) merupakan jantung pada sistem komputer atau
mikrokontroler. Seberapa cepat suatu proses dalam mikrokontroler ditentukan olah
besarnya frekuensi clock nya. Siklus mesin digunakan untuk merespon setiap
instruksi yang ada dan harus menyelesaikan instruksi tersebut sesuai dengan waktu
yang ditentukan. Setiap instruksi memiliki siklus mesin yang berbeda-beda
tergantung mikrokontroler, set instruksi dan mode operasi yang digunakan.
Gambar 2.6. Oscilator xtall.
2.3 Mikrokontroler pada Robotik
Gambar 2.7 berikut merupakan arsitektur standar penerapan mikrokontroler
sebagai kontroler robot.

Materi Ajar : Pengantar Robotika (FSK 45311)
24
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 2.7. Kontroler Robotik
Pada gambar 2.7 diatas terdapat 4 buah blok proses sistem yang masing-masing
terdiri atas blok sensor, blok rangkaian pengkondisi sinya, blok MCU dan blok
aktuator. Blok sensor merupakan blok yang digunkan untuk mendeteksi keadaan
lingkungan robot sesuai dengan kegunaannya. Misalnya sensor pendeteksi cahaya,
jarak, kelembapan suhu dan sebagainya. Keluaran dari sensor dapat langsung
dimasukan ke blok MCU yang merupakan suatu mikrokontroler atau masuk ke blok
rangkaian pengkondisi sinyal untuk diatur kelurannya sesuai dengan kebutuhan
mikrokontroler. Jadi sensor keluaran sensor dapat langsung diproses dalam Mcu atau
dikondisikan terlebihdahulu sesuai rancangan. Kemudian MCU akan memproses
sinyal tersebut untuk diambil tindakan pada aktuator. Misanya belok kiri, maju,
mundur, putar dan sebagainya sesuai dengan fungsi robot. Tentu saja pergerakan
tersebut harus sesuai dengan algoritma program yang digunakan. Berikut adalah
gambar rangkaian sederhana sistem robot line follower yang menggunakan
mikrokontroler PIC16F84.

Materi Ajar : Pengantar Robotika (FSK 45311)
25
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 2.8. Sistem minimun kontroler
Pada 2.8 diatas terdapat dua buah sensor hitam putih yang berfungsi untuk
mendeteksi jalur kiri dan jalur kanan. Kemudian sebuah mikrokontroler PIC16F84A
yang akan memproses sinyal masukan dari kedua sensor sesuai dengan logika
Gambar 2.9 berikut, yang merupakan kondisi logika sensor yang akan diprogram
pada robot. Kemudian terdapat dua buah driver motor yang akan menentukan
pergerakan robot tersebut.
Gambar 2.9. Logika sensor
Setelah semua komponen terpasang dengan baik, maka proses selanjutnya adalah
membuat algoritma pergeraka robot yang tertuang dalam programnya.Setelah

Materi Ajar : Pengantar Robotika (FSK 45311)
26
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
program telah dimasukan ke robot, maka robot akan bekerja sesuai dengan algoritma
yang diberikan. Berikut adalah listing program robot line follower yang tertanam
pada kontroler robot
// program percobaan robot line follower
// laboratorium Robotika dan Kendali
// Fakultas ilmu komputer unsri
// by zarkasi
#include<pic1684.h>#include<stdio.h>
void kiri(){
PORTA=0x0b;}void kanan(){
PORTA=0x0e;}void stop(){
PORTA=0;}void maju(){
PORTA=0x0a;}
void main(void){
TRISA=0;TRISB=0x03;{
char inp;inp=PORTB;
if (inp==0x01){kiri();}
else if(inp==0x02){kanan();}
else if(inp==0x03){stop();}
else {maju ();}
}}

Materi Ajar : Pengantar Robotika (FSK 45311)
27
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 2.10 berikut adalah contoh gambar robot line follower hasil dari percobaan.
Dimana robot akan mengikuti garis yang telah ditentukan sebagai jalur yang akan
ditempuh oleh robot.
Gambar 2.10. Hasil pengujian robot line follower

Materi Ajar : Pengantar Robotika (FSK 45311)
28
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
BAB 3
SISTEM SENSOR
Sensor pada robot digunakan untk mendeteksi keadaan lingkungan robot.
Dengan sensor robot dapat merasakan, melihat dan megetahui apa sebenarnya yang
sedang dihadapi, tentu saja robot juga dapat mengambil tindakan yang sesuai dengan
kondisi yang algoritma yang diberikan padannya. Sensor terbagi dalam dua
kelompok besar yaitu sensor biner dan sensor analog.
3.1. Sensor Biner
Sensor biner adalah suatu sensor yang keluaranya hanya menghasilkan dua
keadaan saja yaitu nol (0) atau satu (1). Sensor ini juga sering disebut dengan sensor
ON/OFF. Adakalanya suatu aplikasi hanya memerlukan suatu kondisi saja, misalnya
pembuka pintu otomatis, penghitung hasil pertandingan dan banyak lagi. Contoh
yang paling nyata adalah sensor limit switch, LDR, LED infra merah dan
sebagainya.
3.1.1. Sensor Limit Switch
Limit switch bekerja dalam level nol dan satu. Sensor ini dapat diaktifkan
dalam keadaan normaly open atau normaly closed, bergantung dari peletakan sensor
pada rangkaian. Jika terjadi perubahan kondisi sensor maka keluarannya dapat satu
atau nol. Dalam aplikasinya dapat sensor digunakan untuk mendeteksi pencuri yang
masuk melewati pintu atau jendela. Dengan memasang sensor pada daun pintu, maka
jika pintu terbuka indikator yang dapat berupa alrm akan berbunyi. Aplikasi pada
robot, limit switch dapat diletakkan pad bumper robot untuk menghindari tabrakan.
Dengan ini kerusakan pada robot data diminamilsasi. Gambar 3.1 berikut merupakan
rangkaian sensor limit switch.

Materi Ajar : Pengantar Robotika (FSK 45311)
29
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.1 Rangkaian sensor limit swtch
Pada gambar 3.2 dibawah merupakan gambar sketsa perancangan sensor
limit switch yang diaplikasikan pada robot untuk menghindari tabrakan. Kondisi
awal dari pin mikrokontroler adalah satu (1), jika terjadi tabrakan maka bagian saklar
akan tertekan, sehingga tegangan 5V dc akan terhubing ke ground. Hal ini
menyebabkan sinyal ke mikrokontroler akan menjadi nol (0), sehingga kondisi ini
akan menyebabkan robot mengambil tindakan menghindari tabrakan.
Battere
RK
RR
MC
U
AT
ME
GA
8535
Driver M
otor
RO
DA
BE
BA
S
8 x Photo R
eflector
Lim
it Sw
itch
Gambar 3.2 Rancangan limit switch pada robot
3.1.2. Sensor Light Dependent Resistor (LDR)
Sensor Light Dependent Resistor (LDR) adalah resistor yang besar
resistansinya bergantung terhadap intensitas cahaya yang menyelimuti
permukaannya. LDR, dikenal dengan banyak nama: foto-resistor, foto-konduktor, sel

Materi Ajar : Pengantar Robotika (FSK 45311)
30
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
foto-konduktif, atau hanya foto-sel, yang sering digunakan dalam literatur adalah
foto-resistor atau foto-sel. Sebuah Foto-resistor atau LDR adalah komponen yang
menggunakan foto-konductor di antara dua pin-nya, bentuk fisik sensor LDR seperti
pada gambar 3.3. Saat permukaannya terpapar cahaya akan terjadi perubahan
resistansi di antaranya.
Gambar 3.3. Sensor LDR
Gambar 3.4. Rangkaian Sensor LDR
Mekanisme di balik fotoresistor atau LDR adalah fotokonduktivitas, yaitu suatu
peristiwa perubahan nilai konduktansi bahan semikonduktor saat energi foton dari
cahaya diserap olehnya. Ketika digunakan sebagai Foto-resistor atau LDR, bahan
semikonduktor hanya digunakan sebagai elemen resistif dan tidak ada koneksi PN-
nya seperti pada gambar 3.4. Dengan demikian, Foto-resistor atau LDR adalah murni
komponen pasif. Sensor ini menghasilkan keluaran berupa nilai analog yang dibaca
menggunakan fitur ADC (Analog to Digital Converter) pada mikrokontroler. Untuk
aplikasi pada robot adalah sebagai pengikut cahaya. Robot dikondisikan bergerak

Materi Ajar : Pengantar Robotika (FSK 45311)
31
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
jika terdapat cahaya yang jatuh pada permukaan sensor. Jika keadaan gelab maka
robot akan berhenti. Gambar 3.5 berikut adalah contoh robot pengikut cahaya,
Gambar 3.5. Robot pengikut cahaya
3.1.3. Sensor Infra Merah
Led infra merah merupakan piranti semikonduktor khusus yang dirancang
untuk memancarkan cahaya apabila arus melaluinya. Apabila diberi bias maju,
energi elektron yang mengalir melewati tahanan sambungan diubah menjadi energi
cahaya.
Cahaya infra merah walaupun mempunyai panjang gelombang yang sangat
panjang, tetapi tidak dapat menembus bahan-bahan yang melewatkan cahaya
tampak. Light Emiting Diode (LED) infra merah merupakan salah satu sumber
cahaya infra merah. LED merupakan suatu piranti yang tersusun dari sambungan
semikonduktor p-n yang dapat mengeluarkan cahaya bila dialiri arus bias maju.
Panjang gelombang yang akan diemisikan oleh LED tergantung pada energi gap
(dalam elektron volt, eV). Energi gap merupakan karakteristik bahan semikonduktor
sehingga frekuensi dari cahaya yang dipancarkan LED tergantung dari bahan
penyusunnya. Gambar 3.6 berikut merupakan spektrum gelombang infra merah.

Materi Ajar : Pengantar Robotika (FSK 45311)
32
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.6 Spektrum Infra Merah
Cahaya infra merah merupakan cahaya yang tidak tampak. Jika dilihat
dengan dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak
pada spektrum elektromagnet dengan panjang gelombang di atas panjang gelombang
cahaya merah. Dengan panjang gelombang ini maka cahaya infra merah ini akan
tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih
terasa/dideteksi. Pada dasarnya komponen yang menghasilkan panas juga
menghasilkan radiasi infra merah termasuk tubuh manusia maupun tubuh binatang.
Gambar 3.7 Sensor Infra Merah
Cahaya infra merah, walaupun mempunyai panjang gelombang yang sangat
panjang tetap tidak dapat menembus bahan-bahan yang tidak dapat melewatkan
cahaya yang nampak sehingga cahaya infra merah tetap mempunyai karakteristik
seperti halnya cahaya yang nampak oleh mata. Pada pembuatan komponen yang
dikhususkan untuk penerima infra merah lubang untuk menerima cahaya (window)
sudah dibuat khusus sehingga dapat mengurangi interferensi dari cahaya non-infra
merah. Oleh sebab itu sensor infra merah yang baik biasanya jendelanya (pelapis
yang terbuat dari silikon) berwarna biru tua keungu-unguan. Sensor ini biasanya

Materi Ajar : Pengantar Robotika (FSK 45311)
33
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
digunakan untuk aplikasi infra merah yang digunakan diluar rumah (outdoor).
Gambar 3.8 dibawah ini merupakan rangkaian sensor infra merah.
+
-
Vref
P3.6
Vcc = 5 V Vcc = 5 V
R1=1K R1=10K
LM339
Foto dioda
Infra red
Gambar 3.8 Rangkaian Infra Merah
Ada banyak pendeteksi cahaya infra merah salah satunya adalah dioda foto.
Dioda foto adalah dioda sambungan p-n yang secara khusus dirancang untuk
mendeteksi cahaya. Energi cahaya lewat melalui lensa yang kemudian mengekpos
sambungan dioda foto. Karakteristik photodiode menpunyai respon waktu yang
sangat cepat hingga 0,1 nS dan mempunyai skala respon linier yang luas sekali.
Namun pada bagian terendah dari skala ini tidak dapat digunakan karena derau
(noise) yang disebut dark current.
Aplikasi sensor infra merah pada robot yaitu untuk mendeteksi jalur hitam
dan putih. Dengan mengatur kondisi dari rangkaiannya , kita dapat menentukan
logika yang dihasilkan. Misanya hitam berlogika satu (1) dan putih berlogika nol (0),
atau sebaliknya. Contoh penerapnnya adalah saat sensor infra merah mengenai garis
atau jalur hitam maka photodioda tidak mendapat cahaya dari infra merah maka
robot akan berjalan. Dan disaat sinar infra merah tidak mengenai garis atau jalur
yang berwarna hitam maka photo dioda mendapat cahaya dari infra merah maka
robot akan berhenti.

Materi Ajar : Pengantar Robotika (FSK 45311)
34
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.9 Contoh pemasangan sensor infra-merah
3.1.4. Sensor Passive Infra Red (PIR)
Sensor Passive Infra Red (PIR) adalah sensor yang digunakan untuk
mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya
sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar
infra merah dari luar. Sensor ini biasanya digunakan dalam perancangan detektor
gerakan berbasis PIR. Karena semua benda memancarkan energi radiasi, sebuah
gerakan akan terdeteksi ketika sumber infra merah dengan suhu tertentu (misal:
manusia) melewati sumber infra merah yang lain dengan suhu yang berbeda (misal:
dinding), maka sensor akan membandingkan pancaran infra merah yang diterima
setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan
pembacaan pada sensor. Gambar 3.10 dibawah merupakan gambar modul sensor
PIR.
Gambar 3.10 Modul sensor PIR
Pancaran infra merah masuk melalui lensa Fresnel dan mengenai sensor
pyroelektrik, karena sinar infra merah mengandung energi panas maka sensor
pyroelektrik akan menghasilkan arus listrik. Sensor pyroelektrik terbuat dari

Materi Ajar : Pengantar Robotika (FSK 45311)
35
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
bahan galium nitrida (GaN), cesium nitrat (CsNo3) dan litium
tantalate (LiTaO3). Arus listrik inilah yang akan menimbulkan tegangan dan dibaca
secara analog oleh sensor. Kemudian sinyal ini akan dikuatkan oleh penguat dan
dibandingkan oleh komparator dengan tegangan referensi tertentu (keluaran berupa
sinyal 1-bit).
Gambar 3.11 Blok diagram sensor PIR
Sensor PIR hanya akan mengeluarkan logika 0 dan 1, 0 saat sensor tidak
mendeteksi adanya pancaran infra merah dan 1 saat sensor mendeteksi infra
merah. Sensor PIR didesain dan dirancang hanya mendeteksi pancaran infra merah
dengan panjang gelombang 8-14 mikrometer. Diluar panjang gelombang tersebut
sensor tidak akan mendeteksinya. Untuk manusia sendiri memiliki suhu badan yang
dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10
mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat
terdeteksi oleh sensor PIR. (Secara umum sensor PIR memang dirancang untuk
mendeteksi manusia). Sensor ini menghasilkan keluaran nilai digital (0/1) yang
dibaca melalui saluran I/O pada mikrokontroler. PIR yang digunakan sebanyak 3
buah untuk setiap ruangan
3.2. Sensor Analog
Sensor analog adalah sensor yang menghasilkan keluaran sinyal analog.
Sinyal ini dapat berupa hambatan (potensio), gelombang suara (ultrasonik),
gelombang infra merah (GP2D12), temperatur (L35DZ), kemiringan dan banyak lagi
lainnya. Pada umumnya sensor ini akan diproses oleh rangkaian pengkodisi sinyal

Materi Ajar : Pengantar Robotika (FSK 45311)
36
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
yang merubah sinyal keluran analog ke dalam bentuk digital, sehingga dapat
diproses oleh prosesor. Menurut jenis dan fungsinya, sensor analog dapat dibedakan
menjadi
1. Sensor kontak
Sensor kontak digunkan untuk mendeteksi kontak atau gaya. Jenis sensor ini
dibedakan atas sensor sentuh dan sensor tekanan.
2. Sensor jarak
Sensor jarak digunakan untuk mendeteksi obyek dengan darak tertentu.
3. Sensor vision
Sensor vision digunakan untuk mendefeninikan benda, terkait dengan ukuran,
warna bentuk, posisi dan sebagainya. Sensor ini sangat terkait dengan bidang
ilmu image processing.
4. Sensor suara
Sensor ini berfungsi untuk mengenali jenis benda dan mendapatkan informasi
memalui suara.
3.2.1. Sensor Ultrasonik
Gelombang ultrasonik merupakan gelombang mekanik longitudinal dengan
frekuensi di atas 20 kHz. Gelombang ini dapat merambat dalam medium padat, cair
dan gas, hal disebabkan karena gelombang ultrasonik merupakan rambatan energi
dan momentum mekanik sehingga merambat sebagai interaksi dengan molekul dan
sifat enersia medium yang dilaluinya. Karakteristik gelombang ultrasonik yang
melalui medium mengakibatkan getaran partikel dengan medium amplitudo sejajar
dengan arah rambat secara longitudinal sehingga menyebabkan partikel medium
membentuk rapatan (Strain) dan tegangan (Stress). Proses kontinu yang
menyebabkan terjadinya rapatan dan regangan di dalam medium disebabkan oleh
getaran partikel secara periodik selama gelombang ultrasonik melaluinya. Gambar
3.12 dibawah ini merupakan modul sensor ultrasonik.

Materi Ajar : Pengantar Robotika (FSK 45311)
37
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.12 Bentuk modul sensor ultrasonic
Jika gelombang ultrasonik merambat dalam suatu medium, maka partikel
medium mengalami perpindahan energi. Besarnya energi gelombang ultrasonik yang
dimiliki partikel medium adalah :
E =Ep+ Ek ...(3.1)
Dengan :
Ep = energi potensial (Joule)
k = energi kinetik (Joule)
Untuk menghitung intensitas gelombang ultrasonik perlu mengetahui energi yang
dibawa oleh gelombang ultrasonik. Intensitas gelombang ultrasonik ( I ) adalah
energi yang melewati luas permukaan medium 1 m 2 /s atau watt/m 2 . Untuk sebuah
permukaan, intensitas gelombang ultrasonik ( I ) diberikan dalam bentuk persamaan :
I = 1/2 V A 2 (2 p f) 2 = ½ Z (A ) 2 (3.2)
Dengan :
r = massa jenis medium kg/m 3 ) ,
f = frekuensi (Hz)
v = kecepatan gelombang (m/s 2 ) ,
V = volume (m 3 )
A = amplitudo maksimum (m)
Z = v = impedansi Akustik (kg/m 2 .s)
= 2 f = frekuensi sudut (rad/s)

Materi Ajar : Pengantar Robotika (FSK 45311)
38
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gelombang ultrasonik yang keluar dari sumber transduser mengalir keluar ke semua
arah dalam arah tiga dimensi. Gelombang ultrasonik merambat keluar, energi yang
di bawanya tersebar ke permukaan yang makin lama makin luas, karena merambat
dalam arah arah tiga dimensi, maka luas permukaan merupakan luasan permukaan
bola dengan radius r adalah 24 r . Berarti intensitas gelombang ultrasonik adalah
24 r
P
Luas
DayaI
...(3.3)
Jika keluaran daya P dari sumber konstan, maka intensitas berkurang sebagai
kebalikan dari kuadrat jarak dari sumber :
2
1
rI (3.4)
Jika kita ambil dua titik dengan jarak 1 r dan 2 r dari sumber, maka I 1 = P/4 r 21
dan I 2 = P/4 r 22 , sehingga :
22
21
1
2
r
r
I
I (3.5)
Dengan demikian, jika jarak digandakan misalnya (r 1 /r 2 = 2), maka intensitas
menjadi ¼ dari nilai mula-mula ( I 2 / I1 ) = (1/2) 2 = ¼.
Jika amplitudo gelombang ultrasonik berkurang terhadap jarak, maka amplitudo
gelombang ultrasonik menjadi mengecil sebesar 1/r. karena intensitas sebanding
dengan kebalikan dari kuadrat jarak, sehingga
rA
1 (3.6)
Jika kita ambil dua jarak yang berbeda dari sumber transduser, r1 dan r2 maka:
2
1
1
2
r
r
A
A (3.7)

Materi Ajar : Pengantar Robotika (FSK 45311)
39
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Ketika gelombang ultrasonik dua kali lipat lebih jauh dari sumber transduser, maka
amplitudo akan menjadi setengahnya).
Gambar 3.13 Prinsif kerja sensor ultrasonik
Gambar 3.13 diatas merupakan gambar gelombang ultrasonik. Gelombang
ultrasonik mempunyai sifat memantul, diteruskan dan diserap oleh suatu
medium/jaringan. Apabila gelombang ultrasonik ini mengenai permukaan jaringan,
maka sebagian dari gelombang ultrasonik ini akan dipantulkan dan sebagian lagi
akan diteruskan/ditransmisikan. Karakteristik gelombang ultrasonik yang melalui
medium mengakibatkan getaran partikel dengan medium amplitudo sejajar dengan
arah rambat secara longitudinal sehingga menyebabkan partikel medium membentuk
rapatan (strain) dan tegangan (stress). Proses kontinu yang menyebabkan terjadinnya
rapatan dan regangan didalam medium disebabkan oleh getaran partikel secara
periodik selama gelombang ultrasonik melaluinya.
Mula-mula gelombang ultrasonik dengan amplitudo tertentu mengenai
jaringan, kemudian gelombang ultrasonik tersebut akan dipantulkan permukaan
jaringan. Perbandingan amplitudo tekanan pantulan (R) terhadap amplitudo tekanan
datang (Ao) bergantung pada impedansi akustik (Z) dari dua medium itu. Hubungan
pernyataan itu :
21
21
ZZ
ZZ
Ao
R
(3.8)
dengan : 1 Z dan 2 Z = impedansi akustik dari kedua medium (kg/m2.s).

Materi Ajar : Pengantar Robotika (FSK 45311)
40
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Telah dikemukakan bahwa gelombang ultrasonik sebagian akan
diteruskan/ditransmisikan. Perbandingan antara amplitudo tekanan transmisi (T) dan
amplitudo tekanan gelombang datang (Ao) adalah :
21
12
ZZ
Z
Ao
T
(3.9)
Pada hukum geometri diketahui bahwa cahaya bisa refleksi (pantul) dan refraksi
(bias). Demikian pula pada gelombang ultrasonik dapat dipatahkan (didefraksi) dan
gelombang ultrasonik yang masuk ke dalam jaringan akan menyebabkan efek friksi
(friction). Penyerapan energi gelombang ultrasonik ini akan mengakibatkan
berkurangnya amplitudo gelombang ultrasonik. Nilai amplitudo gelombang
ultrasonik pada jaringan dinyatakan dalam persamaan :
A = Ao x (3.10)
Dengan
A = amplitudo gelombang ultrasonik yang menetap pada jaringan dengan
tebal x (m)
Ao = amplitudo gelombang ultrasonik mula-mula (m)
= koefisien absorbsi jaringan (m 1 )
Berikut adalah aplikasi sensor ultrasonik sebagai pengukur jarak obyek. Sensor
ultrasonik mendeteksi objek dengan cara mengirimkan suara ultrasonik dan
kemudian “mendengarkan” pantulan suara tersebut. Sensor ultrasonik hanya akan
mengirimkan suara ultrasonik ketika ada pulsa trigger dari mikrokontroler (Pulsa
high selama 5uS). Suara ultrasonik dengan frekuensi sebesar 40KHz akan
dipancarkan selama 200uS. Suara ini akan merambat di udara dengan kecepatan
344.424m/detik (atau 1cm setiap 29.034uS), mengenai objek untuk kemudian
terpantul kembali ke Sensor ultrasonik. Selama menunggu pantulan, Sensor
ultrasonik akan menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika

Materi Ajar : Pengantar Robotika (FSK 45311)
41
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
suara pantulan terdeteksi oleh Sensor ultrasonic. Gambar 3.19 dibawah ini
merupakan gambar diagram waktu sensor ultrasonik.
Gambar 3.14 Diagram waktu modul Sensor Ultrasonik
Oleh karena itulah lebar pulsa tersebut dapat merepresentasikan jarak antara
Sensor ultrasonik dengan objek. Selanjutnya mikrokontroler cukup mengukur
lebar pulsa tersebut dan mengkonversinya dalam bentuk jarak dengan
perhitungan sebagai berikut :
(3.11)
atau
(3.12)
Karena 1/29.034 = 0.034442
Dimana : S = jarak (cm)
t = lebar pulsa
Satu hal yang perlu diperhatikan adalah bahwa Sensor ultrasonik tidak dapat
mengukur objek yang permukaannya dapat menyerap suara, seperti busa atau sound
damper lainnya. Pengukuran jarak juga akan kacau jika permukaan objek bergerigi
dengan sudut tajam. Berikut adalah listing program aktivasi sensor ultrasonik yang
menhasilkan keluran digital.

Materi Ajar : Pengantar Robotika (FSK 45311)
42
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
; p84s02;-----------------------------------------------------------; 10msec timer @20MHz;-----------------------------------------------------------
list p=pic16f84ainclude <p16f84a.inc>
;-----------------------------------------------------------; File Register;-----------------------------------------------------------
w_tmp EQU 0CHs_tmp EQU 0DHstatus equ 0x03porta equ 0x05trisa equ 0x85TRISB equ 0x86rp0 equ 5OPTIONREG EQU h'0001'TOIF equ h'0002'TOIE equ h'0005'count EQU 12Hcount2 equ 13hcount3 equ 14h
;-----------------------------------------------------------org 0goto start ;goto main routine
;-----------------------------------------------------------; interupted to timer;-----------------------------------------------------------
org 4 ;interrupt processmovwf w_tmp ;save W reg.swapf STATUS,W ;by using swapfmovlw s_tmp ;save STATUSmovlw b'0010000'movwf INTCON ;disable interruptcall SubInt ;call interrupt service routinemovlw b'10100000'movwf INTCON ;enable TMR0 intteruptswapf s_tmp,W ;restor STATUSmovwf STATUSswapf w_tmp,F ;by using swapfswapf w_tmp,W ;restor W reg.retfie ;return from interrupted process
;-----------------------------------------------------------; main program;-----------------------------------------------------------start
call Portset ;Initialize Portsta call ultra_on
goto sta;------------------------------------------------------------; sensor ultra sonic 1 = RA0;------------------------------------------------------------ultra_on
bcf PORTA,1bsf status,rp0

Materi Ajar : Pengantar Robotika (FSK 45311)
43
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
bcf TRISA,2bcf status,rp0movfw h'0'movwf PORTBbsf PORTA,2call t3usbcf PORTA,2call t700usbsf PORTA,2call t3usbsf status,rp0bsf TRISA,2bcf status,rp0call waktu
chekbtfss PORTA,2goto kirigoto chekreturn
kirimovf TMR0,Wmovwf PORTB;movfw count2;movwf PORTAcall waktu1return;goto kiri
;-----------------------------------------------------------Portset
bsf status,rp0 ;change to BANK1movlw b'00011101' ;PORTA:OOOIIIIImovwf TRISAmovlw b'00000000' ;PORTB:OOOOOOOO;movlw b'11111111' ;PORTB:OOOOOOOOmovwf TRISBmovlw b'00000111' ;Use TMR0movwf OPTION_REG ;prescaler rate = 1/256bcf status,rp0 ;change to BANK0return
waktumovlw d'1' ;60=255-195movwf TMR0 ;set to TMR0movlw b'10100000' ;enable TMR0 interrupt andmovwf INTCON ;enable Grobal interruptreturn
;-----------------------------------------------------------; counter untuk timerSubInt
movlw d'1' ;208=255-48(48 x counter)movwf TMR0 ;set to TMR0incf count,Freturn
t700usmovlw d'7' ;time 700 uS

Materi Ajar : Pengantar Robotika (FSK 45311)
44
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
movwf 0x0ftunda7
movlw d'40'movwf 0x10
tunda71decfsz 0x10goto tunda71decfsz 0x0fgoto tunda7return
t3usnopnopnopreturn
waktu1movlw d'100'movwf 0x13
tunda73movlw d'150'movwf 0x14
tunda72decfsz 0x14goto tunda72decfsz 0x13goto tunda73return
end
3.2.2. Sensor Infra Merah (GP2D12)
Sensor jarak infra merah jenis GP2D12 adalah sensor untuk mengukur jarak
suatu obyek dengan menggunakan media infra merah. Sensor ini mengeluarkan
sinyal analog dan mampu mengukur jarak pada rentang 10 cm sampai dengan 80
cm. Konfigurasi sensor jenis ini dapat dilihat dalam Gambar 3.15 (a) dan (b) berikut
ini.

Materi Ajar : Pengantar Robotika (FSK 45311)
45
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
(a) Fisik Sensor (b) Konfigurasi SensorGambar 3.15 Sensor jarak
Berikut adalah fitur-fitur yang dimiliki oleh salah satu sensor jarak :
1. keluaranya berupa sinyal analog,
2. pembacaan efiktif mulai dari 10 cm s.d 80 cm,
3. konsumsi tegangan 5 Vdc,
4. konsumsi arus 33 mA s.d 50 mA,
5. hampir tidak terpengaruh oleh warna yang terdeteksi.
Sensor ini terdiri satu buah pemancar (transciever) dan satu buah penerima
(reciever). Keluaran sensor ini bersifat tidak linier yang dapat dilihat dari bentuk
gelombang keluaranya. Tegangan keluaran hasil proses pengukuran adalah tegangan
analog. Pada jarak 10 cm tegangan keluaran sebesar 2,4 Vdc dan akan terus turun
sampai 0.4 Vdc pada jarak 80 cm. Gambar 2.11 merupakan gambar karakteristik
keluaran sensor GP2D12.
Sensor infra merah menggunakan media cahaya dalam hal pengukuran posisi
obyek. Frekuensi cahaya infra merah berada pada rentang daerah frekuensi 1011Hz
sampai dengan 1014 Hz. Prinsip kerja sensor adalah mula-mula cahaya infra merah
dipancarkan oleh tranciever secara terus menerus. Setelah mengenai obyek, cahaya
akan dipantulkan kembali dan hasil pantulannya akan diterima oleh susunan detektor
infra merah (reciever). Sudut pantul cahaya infra merah akan berubah sesuai dengan

Materi Ajar : Pengantar Robotika (FSK 45311)
46
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
perubahan jarak sensor terhadap obyek. Gambar 3.16 merupakan gambar karakteristi
sensor GP2D12
Gambar 3.16 Karakteristik keluaran sensor GP2D12.
Dalam aplikasi yang menggunakan mikrokontroler sebagai pengolah data,
sinyal keluaran analog tidak dapat langsung digunakan. Ini disebabkan sinyal I/O
yang diproses dalam mikrokontroler adalah sinyal digital. Maka sinyal keluaran
analog harus terlebih dahulu diubah kedalam sinyal digital dengan menggunakan
komponen analog to digital converter (ADC).
Berikut adalah contoh aplikasi sensor infra merah untuk mengukur jaraj
obyek. Setiap sensor diproses dalam pin ADC pada mikrokontroler dengan nilai
konversi 10 bit. Nilai konversi mulai dari 0 desimal sampai dengan 1023 desimal.
Karena mikrokontroler mimiliki lebar data 8 bit, maka jarak maksimal yang dapat
ditampilkan oleh mikrokontroler hanya 8 bit. Dalam perancangan ini nilai konversi
ADC diambil mulai dari bit 2 sampai dengan bit 9, sedangkan bit 0 dan bit 1
diabaikan. Data sensor merupakan besaran analog yang diubah kedalam data
desimal dan biner. Konversi ini dilakukan dengan rumusan sebagai berikut.
Konversi ADC = (3.13)

Materi Ajar : Pengantar Robotika (FSK 45311)
47
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Dari rumusan di atas dapat dilakukan perhitungan menentukan konversi ADC untuk
data jarak jangkauan terjauh dan terdekat dari besaran analog ke dalam data digital.
Spesifikasi data konversi adalah sebagai berikut.
Lebar data ADC 10bits = 1023
Jarak jangkauan sensor = 10cm s.d 80cm = 80 – 10 = 70 cm
Vreff =5V (ideal)
Vreff = 4.8V (Pengukuran)
Vin max=2.4V (nilai maksimal tegangan sensor)
Konversi untuk data ideal :
ADC =
Berikut adalah listing program untuk aktivasi sensor GP2D12 dengan menghasilkan
keluran digital 8 bits.
; p88s01 A/D test;-----------------------------------------------------------
list p=pic16f88#include <p16f88.inc>
;-----------------------------------------------------------; File Register;-----------------------------------------------------------adcon EQU 20Hadcon1 equ 21hadcon2 equ 22hjarak equ 23hjarak1 equ 24hjarak2 equ 25hjoypad equ 26h;-----------------------------------------------------------
org 0goto start
;start
call Portset ;Initialize Portgoto LoopSt
;-----------------------------------------------------------LoopSt
movlw h'0a'movwf PORTA

Materi Ajar : Pengantar Robotika (FSK 45311)
48
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
jaraks1call adconRA4movf adcon, Wandlw h'40'movwf jarakrrf jarak
call adconRB6movf adcon1,Wandlw h'40'addwf jarakrrf jarak
call adconRB7movf adcon2,Wandlw h'40'addwf jarak
btfsc jarak,4goto putar ;goto kananbtfsc jarak,5goto putar1 ;goto kiribtfsc jarak,6goto putar2 ;goto kirigoto LoopSt
putarbtfsc jarak,5goto kirigoto kanan
putar1btfsc jarak,6goto kanangoto kiri
putar2btfsc jarak,5goto kanangoto kiri
kirimovlw h'0b'movwf PORTAgoto jaraks1
kananmovlw h'0e'movwf PORTAgoto jaraks1
;-----------------------------------------------------------
Portsetbsf STATUS, RP0 ;Bank Change(Bank 1)movlw b'00010000'movwf TRISA ;RA4 input

Materi Ajar : Pengantar Robotika (FSK 45311)
49
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
movlw b'11110000' ;A/D => Channel 4movwf ANSEL ;digital(0)/analog(1) inputmovlw b'11111111'movwf TRISB ;RB outputmovlw b'00000000'movwf ADCON1 ;A/D settingbcf STATUS,RP0 ;(BANK0)
bsf ADCON0,0 ;A/D onreturn
;-------------------------------------------------------------------adconRA4
movlw b'10100101' ;**100*** => Channel 0(RA4/AN4)movwf ADCON0nop
adwait ;wait until conversionbtfsc ADCON0,2goto adwait
movf ADRESH,W movwf adcon ;result => adcon
return;********************************************************************adconRB6
movlw b'10101101' ;**100*** => Channel 0(RA4/AN4)movwf ADCON0nop
adwait1 ;wait until conversionbtfsc ADCON0,2goto adwait1
movf ADRESH,W movwf adcon1 ;result => adcon
return;********************************************************************adconRB7
movlw b'10110101' ;**100*** => Channel 0(RA4/AN4)movwf ADCON0nop
adwait2 ;wait until conversionbtfsc ADCON0,2goto adwait2
movf ADRESH,W movwf adcon2 ;result => adcon
returnend
3.2.3. Sensor Suhu LM35
Sensor suhu pada rangkaian elektronik, merupakan suatu alat yang berfungsi
mengubah besaran suhu menjadi besaran elektrik. Ada beberapa macam sensor yang
dapat digunakan sebagai sensor suhu pada rangkaian elektronik, salah satu
diantarnya adalah IC LM35. Untuk lebih jelasnya dapat dilihat dalam Gambar 3.17.

Materi Ajar : Pengantar Robotika (FSK 45311)
50
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.17 Sensor LM35
LM35 adalah sensor suhu yang presisi gambar fisik seperti terlihat pada
gambar 3.17. Perubahan tegangan keluarannya proporsional terhadap perubahan
suhu dalam derajat celcius (centigrade). LM35 tidak membutuhkan proses kalibrasi
untuk mendapatkan akurasi 0,24 0C pada suhu -55 s/d +150 0C. Impedansi keluaran
yang rendah dan tegangan keluarannya yang linier mempermudah dalam interfacing
ke pengkondisi sinyal. LM35 dapat beroperasi pada catu daya tunggal atau catu plus
minus. Konsumsi arus hanya 60uA, sehingga memiliki heating yang sangat rendah
kurang dari 0,1 0C. Fitur LM35 adalah sbb:
Centigrade atau celcius
Sensitivitas10 mV/ 0C
Akurasi 0,5 C pada suhu 25 0C
Handal dalam pengukuran jarak jauh
Tegangan operasi 4 s/d 30 V
Konsumsi arus 60 uA
Selt heating rendah 0,08 0C
Non linieritas ± 0,25 0C
Impedansi keluaran 0,1 Ώ untuk arus beban 1 mA.

Materi Ajar : Pengantar Robotika (FSK 45311)
51
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Vs(4-20v)
VoLM35
Gambar 3.18 Rangkaian sensor LM35
Rangkaian pengkondisi sinyal digunakan dalam perancangan alat ini adalah untuk
mengubah masukan yang berupa masukan analog menjadi keluaran digital. Masukan
yang yang diberikan oleh sensor suhu yang merupan besaran analog yaitu tegangan,
terlebih dahulu dikuatkan dengan rangkaian penguat dan kemudian diubah dalam
bentuk keluaran digital oleh IC ADC0804, yang memiliki satu buah masukan dan 8
bit keluran digital. Rangkaian pengkondisi sinyal secara keseluruhan dapat dilihat
dalam Gambar 3.19.
Gambar 3.19 Rangkaian Pengkondisi Sinyal
Dalam Gambar 3.19. terlihat bahwa rangkaian pengkondisi sinyal terdiri dari tiga
buah komponen utama, yaitu :
1. Sensor suhu LM35
2. Rangkaian Penguat (Op-Amp)
3. ADC0804
LM35
Vcc
-IN +
CLK OUT
CLK IN
WR
RD
INTR
CS
D0D1D2D3D4D5D6D7
IN - AGNDGNDVref
Vcc1817161514131211
6
194
3
1
2
5
97
810
+3
2
6
150pF
+5V
ADC0804
MCU
R1
Rf
R2

Materi Ajar : Pengantar Robotika (FSK 45311)
52
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Berdasarkan rangkaian diatas dapat kita dapat menghitung parameter-parameter
rangkaian pengkondisi sinyal untuk tegangan referensi (VR) sebesar 5 Volt adalah
sebagai berikut,
Sensor suhu LM35 memiliki sensiivitas sebesar 10mV/0C, yang digunakan untuk
mengukur suhu 0 0C–150 0C. Tegangan maksimum sensor pada suhu 150 0C
adalah
Vmax Sensor = (suhu) x (sensitivitas) .(3.14)
= 150 0C . 10mV/0C = 1,5 Volt
ADC0804 memiliki keluran bit sebanyak 8 bit dengan tegangan referensi (VR)
sebesar +5 Volt. Pada suhu 150 0C keluaran ADC harus menunjukkan 1111 1111
atau FFH. Jadi tegangan masukan yang dihasilkan pada bit penuh (FFH) adalah
Vin = VR . ( 2-1 + 2-2 +…..+ 2-8) …(3.15)
= 5 Volt . 0,9961 = 4,9805 Volt
Tegangan per step (VStep) yang dihasilkan adalah
VStep = VR . (2– n – 1) (3.16)
VStep = 5 Volt . ( 1/255)
= 0,0196 Volt
Penguatan (A) yang dihasilkan adalah :
A = Sensor
out
V
V
max
(3.17)
= Volt
Volt
.5,1
.9805,4= 3,32
Perubahan tegangan keluaran sensor (VT) yang dihasilkan adalah :
VT = A
VStep (3.18)

Materi Ajar : Pengantar Robotika (FSK 45311)
53
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
VT = 0059,032,3
0196,0 Volt
Resolusi pembacaan suhu (T) adalah:
T = asSensitivit
VT (3.19)
= CVolt
Volt
./.01,0
.0059,0= 0,59 0C
Nilai tahanan untuk Rf dan R1 adalah:
A = 1 + (Rf / R1) (3.20)
Rf = 2,3 k dan R1 = 1 k
3.2.4. Sensor Vision
Penggunaan kamera (digital) dalam dunia robotik dikenal dengan robotics
vision, teknologi ini berkembang sangat pesat. Kemajuan ini dicapai berkat
perkembangan teknologi chip IC yang makin kompak dan cepat, dan kemajuan
dibidang komputer (sebagai pengolah). Kemampuan kamera digital biasanya diukur
dari resolusi tangkapan gambarnya dalam pixel/inch atau pixels/cm. Resolusi
menunjukan berapa banyak pixel yang terdapat pada sebuah sensor. Gambar 3.20
dibawah ini merupakan sensor vision.
Gambar 3.20 Sensor vision

Materi Ajar : Pengantar Robotika (FSK 45311)
54
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Sensor pada kamera digital secara umum terbagi menjadi dua jenis yaitu,
a. Sensor CCD ( Charged- coupled device )
b. Sensor CMOS ( Complementary metal–oxide–semiconductor )
Sensor vision berhubungan erat dengan citra (image). Citra digital adalah
gambar pada bidang dwimatra (dua dimensi). Citra adalah angka, dari segi estetika,
citra atau gambar adalah kumpulan warna yang bisa terlihat indah, memiliki pola,
berbentuk abstrak dan lain sebagainya. Citra dapat berupa foto udara, penampang
lintang (cross section) dari suatu benda, gambar wajah, hasil tomografi otak dan lain
sebagainya. Berdasarkan jenis nya citra terdiri dari dua jenis yaitu citra diam (still
images) adalah citra tunggal yang tidak bergerak, dan citra bergerak (moving images)
adalah rangkaian citra diam yang ditampilkan secara beruntun (sekuensial) sehingga
member kesan pada mata kita sebagai gambar yang bergerak. Setiap citra dalam
rangkaian itu disebut frame.
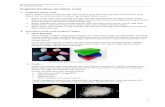
Dasar dari pengolahan citra adalah pengolahan warna RGB pada posisi
tertentu. Dalam pengolahan citra warna direpresentasikan dengan nilai
hexadesimal dari 0x00000000 sampai dengan 0x00ffffff. Warna hitam dengan nilai
0x00000000, dan warna putih bernilai 0x00ffffff. Presentasi pola citra RGB
digambarkan pada Gambar 3.21 berikut.
Gambar 3.21 Representasi Hexadesimal Citra RGB
Nilai warna diatas merupakan gabungan antara 3 warna primer yaitu merah (Red),
hijau (Green), biru (Blue), seperti yang terlihat pada Gambar 3.21 Ada beberapa
mikrokontroler yang telah menyediakan piranti ADC secata terpadu dalam

Materi Ajar : Pengantar Robotika (FSK 45311)
55
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
sistemnya, diantaranya mikrokontroler PIC dan AVR. Gambar 3.22 dibawah ini
merupakan aplikasi I/O.. Sehingga untuk memperoleh warna lain selain warna
primer, perlu menggabungkan skala kecerahan dari tiap warna.
Gambar 3.22. Kombinasi Citra RGB
Citra yang nilai pixel-nya merepresentasikan derajat keabuan atau intensitas
warna putih. Nilai intensitas paling rendah merepresentasikan warna hitam dan nilai
intensitas paling tinggi merepresentasikan warna putih. Pada umumnya citra
grayscale memiliki kedalaman pixel 8 bit (256 derajat keabuan), tetapi ada juga citra
grayscale yang kedalaman pixel-nya bukan 8 bit, misalnya 16 bit untuk penggunaan
yang memerlukan ketelitian tinggi. Proses mengubah citra warna menjadi citra
grayscale digunakan dalam image processing untuk menyederhanakan model citra.
Citra berwarna terdiri dari 3 layer matriks yaitu R-layer, G-layer, B-layer.
Untuk melakukan proses – proses selanjutnya perlu diperhatikan 3 layer
diatas, Jika setiap proses perhitungan dilakukan menggunakan 3 layer maka
dilakukan 3 perhitungan yang sama. Mengubah 3 layer diatas menjadi 1 layer matrik
grayscale. Dalam citra ini tidak ada lagi warna, yang ada adalah derajat keabuan.
Untuk mengubah citra berwarna yang mempunyai nilai matrik masing – masing r, g,
b menjadi citra grayscale dengan nilai s.

Materi Ajar : Pengantar Robotika (FSK 45311)
56
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.23. (a) Citra Asli, (b) Citra Grayscale
Dalam banyak aplikasi yang melibatkan citra, sangat berguna untuk
memisahkan wilayah objek yang kita perlukan dari wilayah-wilayah lain yang tidak
kita perlukan yang dikenal sebagai background. Proses thresholding sering
menyediakan cara yang mudah dan nyaman untuk melakukan segmentasi citra ini
dengan cara membedakan intensitas atau warna antara objek (foreground) dengan
latar belakang (background). Kadang thresholding juga sangat penting untuk dapat
melihat daerah dari sebuah citra yang nilai pixelnya terletak dalam range atau band
intensitas (atau warna). Proses thresholding ini akan menghasilkan citra biner. Citra biner, yaitu citra yang hanya terdiri atas dua warna, yaitu hitam dan
putih. Pada waktu menampilkan gambar, 0 adalah putih dan 1 adalah hitam, jadi
pada citra biner, latar belakang berwana putih dengan objeknya berwarna hitam.
Oleh karena itu, setiap pixel pada citra biner cukup direpresentasikan dengan 1 bit.
Keuntungan citra biner antara lain :
Kebutuhan memori kecil,
Waktu pemrosesan lebih cepat.
Citra biner didapatkan dengan cara meng-threshold-kan citra grayscale.
Operasi thresholding akan mengelompokkan nilai derajat keabuan setiap pixel
kedalam 2 kelas, yaitu hitam dan putih. Contoh citra biner seperti terlihat pada
gambar 3.24.

Materi Ajar : Pengantar Robotika (FSK 45311)
57
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 3.24. (a) Citra Hitam Putih, (b) Citra Biner
Dalam aplikasi robotik sensor vision sering digunakan unutk mengenali
lingkungan atau obyek tertentu. Misalnya bola, kotak warna dan banyak lagi. Pada
bagian ini akan dibahas penerapan sensor vision pada robot line tracking. Gambar
3.25 merupakan gambar robot line tracking yang menggunakan kamera sebagai
pendeteksi garis berwarna. Jalur yang digunakan berfariasi sesuai dengan warna
yang diberikan. Proses mengolahan citra gambar ke dalam citra biner akan dijelaskan
pada bagian berikut.
Gambar 3.25. Robot line tracking sensor kamera
Berikut adalah langkah-langkah yang dilalui untuk proses pengolahan gambar pada
sensor vision.
3.2.4.1. Proses Capture Image
Capture image dengan resolusi untuk webcam berukuran 320x240 pixel.
Ukuran ini merupakan ukuran standar untuk resolusi video dari webcam yang

Materi Ajar : Pengantar Robotika (FSK 45311)
58
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
digunakan sebagai pengganti sensor pada robot line follower ini. Gambar untuk
capture image berukuran 320x240 dapat dilihat pada Gambar 3.26.
Gambar 3.26. Capture image dengan ukuran 320x240 pixel
3.2.4.2. Proses Cropping Image
Tahapan cropping image adalah tahapan yang dilakukan untuk mengambil
sebagian dari suatu citra, dimana proses ini dilakukan dengan membatasi pixel –
pixel tertentu dari citra tersebut. Citra akan diambil pada bagian tengah citra, dengan
membatasi tinggi dan lebar dari citra tersebut, dan hasi dari cropping akan
menghasilkan suatu citra yang mempunyai ukuran 320 x 40 pixel, dengan membatasi
dan mengambil sebagian dari citra tersebut dapat mempersingkat proses pengolahan
citranya karena ukuran dari citra tersebut sudah diperkecil. Proses cropping image
dari ukuran 320 x 240 menjadi 320 x 40 pixel dapat dilihat pada gambar 3.27.
Gambar 3.27. (a) Citra 320 x 240 (b) Citra hasil cropping image 320 x 40

Materi Ajar : Pengantar Robotika (FSK 45311)
59
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Pada gambar diatas (a) merupakan citra 320 x 240, pada citra tersebut dapat dilihat
daerah citra yang telah ditentukan yang akan dicrop, dan pada gambar (b)
merupakan citra hasil dari cropping. Citra hasil cropping tersebut berukuran 320 x
40.
3.2.4.3. Proses Grayscale Image
Grayscale image merupakan tahapan dari pengolahan citra, dimana tahapan
ini merupakan proses untuk mengubah citra RGB menjadi citra abu-abu. Proses ini
harus dilakukan karena merupakan tahapan sebelum merubah citra menjadi citra
biner. Citra grayscale ini didapat dengan penambahan dari masing-masing nilai dari
nilai red, nilai green, dan nilai blue, dan kemudian nilai tersebut dibagi 3, atau
dengan kata lain citra grayscale didapat jika nilai red = green = blue, dengan
perubahan citra RGB menjadi citra grayscale akan semakin menyederhanakan citra
tersebut dan prosesnya kan semakin cepat. Proses dari perubahan citra RGB menjadi
citra grayscale dapat dilihat pada gambar 3.28.
Gambar 3.28. (a) Citra RGB (b) Citra Grayscale
3.2.4.4. Proses Thresholding
Tahapan ini merupakan tahapan untuk mengubah citra dari citra grayscale ke
citra biner, dimana citra biner ini merupakan citra yang bernilai 0 dan 1. Pada tugas
akhir ini citra yang berwarna hitam yaitu garis akan diberikan nilai 1, sedangkan
citra yang berwarna putih yaitu background akan diberikan nilai 0. Proses
thresholding ini akan semakin memperkecil ukuran dari citra, karena hasil dari
thresholding ini yaitu citra biner hanya terdiri dari bit 0 dan 1, sehingga proses
pengolahan citra yang akan dilakukan akan lebih cepat pemrosesannya, tetapi cahaya

Materi Ajar : Pengantar Robotika (FSK 45311)
60
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
yang terlalu terang akan mempengaruhi hasil dari proses thresholding. Gambar 2.35
berikut merupakan gambar dari proses thresholding image
Gambar 3.29. Citra Grayscale (b) Citra Biner
3.2.4.5. Proses Segmentation
Proses segmentasi merupakan proses pembagian citra menjadi beberapa
bagian. Pada tugas akhir ini citra yang akan disegmentasi adalah citra biner yang
telah didapat. Citra ini akan dibagi menjadi 8 bagian, setiap bagian-bagian tersebut
mewakili satu bit. Bagian-bagian citra tersebut berukuran 40 x 40 pixel, segmentasi
ini dilakukan untuk memudahkan mengelompokan citra tersebut. Hasil dari
pembagian citra inilah yang nantinya akan menjadi masukan untuk gerak dari motor.
Gambar 3.30 berikut merupakan hasil dari proses segmentasi.
Gambar 3.30. (a) Citra Biner (b) Hasil segmentasi

Materi Ajar : Pengantar Robotika (FSK 45311)
61
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
BAB 4
MOTOR DC
4.1. Definisi Motor DC
Motor DC adalah alat yang dapat mengubah daya listrik DC menjadi daya
mekanik. Apabila pada penghantar yang dialiri listrik dan terletak diantara dua buah
kutub magnet (kutub utara dan kutub selatan), maka pada penghantar tersebut akan
terjadi gaya yang menggerakkan penghantar tersebut. Suatu kumparan yang terletak
dalam medan magnet yang arah arus dari kedua sisinya berlawanan sehingga arah
gerak terhadap putaran berbeda selanjutnya akan menghasilkan gaya gerak putar atau
kopel.
Semakin besar arusnya maka akan semakin besar kopelnya, juga jika gaya
magnetnya makin kuat kopelnya makin berat. Jika kumparan terletak diantara kutub
magnet yang sedang berputar maka pada kumparan tersebut akan timbul suatu
tegangan dari luar yang disebut gaya gerak listrik (ggl) lawan. Besar kecilnya ggl
lawan tergantung dari tahanan jangkarnya. Adapun bentuk dari bagian dalam motor
DC dapat dilihat pada gambar 4.1.
Gambar 4.1 Bagian Dalam Motor DC

Materi Ajar : Pengantar Robotika (FSK 45311)
62
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang
tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan
mengatur:
1. Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan
kecepatan.
2. Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Motor DC bekerja bedasarkan prinsip gaya Lorentz yang menyatakan ketika
sebuah konduktor beraliran arus diletakkan dalam sebuah medan magnet maka
sebuah gaya akan tercipta secara ortogonal diantara arah medan magnet dan arah
aliran arus, gaya tersebut dikenal dengan gaya Lorentz. Pada gambar 4.2
menunjukkan motor DC beserta gear-box nya.
Gambar 4.2. Motor DC Beserta Gear-Box.
Kecepatan dari motor DC diatur dengan mengubah-ubah tegangan pada motor
tersebut. Jadi, ketika motor DC 5 V diberikan tegangan 2.5 V, maka motor ini hanya
akan berputar pada setengah kecepatan maksimalnya. Pada motor DC dianjurkan
untuk menambahkan gear-box, karena gear-box tersebut berfungsi sebagai pereduksi
putaran atau rotate per minutes (rpm) dari motor dan juga berfungsi menghasilkan
kekuatan putar (torsi) yang paling besar. Bahwa sebuah robot tidak hanya
memerlukan kecepatan motor yang tinggi, tetapi juga torsi yang besar.

Materi Ajar : Pengantar Robotika (FSK 45311)
63
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Penggunaan motor DC dengan pengendali (driver) berupa rangkaian H-
Bridge (IC L293D) merupakan teknik yang paling umum digunakan pada sistem
kendali. IC L293D ini merupakan driver motor DC dua arah yang bisa
menggerakkan motor untuk bergerak maju atau mundur.
4.2. Perangkat H – Bridge
Rangkaian dasar yang biasa digunakan untuk menggerakkan motor DC dikenal
dengan nama rangkaian H-Bridge, rangkaian ini digunakan jika motor akan
digerakkan dalam dua arah. H-Bridge adalah suatu rangkaian elektronik yang
memungkin motor DC dapat berputar ke depan (forward) atau ke belakang
(backward). H-Bridge tersedia dalam bentuk Integrated Circuit (IC) atau dapat
dirangkai sendiri dari komponen-komponen elektronika. Saat ini IC penggerak motor
DC sudah banyak beredar dipasaran, diantaranya L293D, L298, UCN 2998, dan
lain-lain.
Pemilihan tipe IC (chip) yang digunakan berdasarkan nilai tegangan dan arus
motor yang mampu dikendalikannya. Untuk motor kecil (< 600 mA), salah satu
driver tesebut yaitu L293D, sedangkan kebutuhan arus motor yang lebih besar (< 4
A) dapat digunakan L298. IC L293D berisi empat driver H berarus tinggi. IC
tersebut didesain guna menyediakan pengatur (driver) arus listrik secara dua arah
(bidirectional) hingga mencapai lebih dari 1 A pada tegangan dari 4.5 V sampai
dengan 36 V. Gambar skematis pin-pin pada IC L293D yang ditunjukkan pada
gambar 4.3.

Materi Ajar : Pengantar Robotika (FSK 45311)
64
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Gambar 4.3 Konfigurasi Pin Driver Motor DC (L293D).
Pada IC L293D dapat digunakan untuk mengendalikan dua motor sekaligus,
yang dikendalikan yaitu kecepatan putar (dengan PWM) dan arah putar. Sinyal
PWM yang berasal dari mikrokontroler menjadi masukkan kaki EN (Enable)
L293D, sedangkan IN1 dan IN2 mendapat masukkan sumber tetap.
Namun, jika dikehendaki, dapat mengendalikannya dengan kontroler, maka
perlu menghubungkan ke mikrokontroler. Jadi, secara ideal, sebuah motor
membutuhkan 3 pin I/O mikrokontroler. Adapun tabel kebenaran L293D terdapat
pada tabel 4.2.
Tabel 4.1. Tabel Kebenaran L293D.EN (Enable) IN1 IN2 Fungsi1 1 0 Putar Kanan1 0 1 Putar Kiri1 0 0 Henti Segera1 1 1 Henti Segera0 X x Henti Lambat
4.3. Pulse Width Modulation (PWM)
Kecepatan motor listrik (termasuk motor DC) tergantung dari daya yang
diberikan (pada arus yang konstan maka kecepatan motor tergantung dari tegangan).
Makin besar tegangan, maka semakin cepat pula putarannya. Salah satu metode yang
paling sering digunakan dalam pengaturan kecepatan motor ini yaitu dengan Pulse

Materi Ajar : Pengantar Robotika (FSK 45311)
65
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Width Modulation (PWM). PWM merupakan suatu teknik yang powerful untuk
mengendalikan rangkaian analog dengan keluaran digital suatu mikroprosesor.
Pada PWM, tegangan tidak secara kontinu diberikan, melainkan berupa
gelombang segi empat. Prinsip pengendaliannya dengan cara mengubah duty cycle
atau lebar pulsanya. Gambar 4.5 menunjukkan bentuk sinyal PWM pada berbagai
nilai duty cycle (siklus kerja).
Gambar 4.4 Bentuk Sinyal PWM Pada Berbagai Nilai Duty Cycle.
Dari gambar 4.4 ketika duty cycle 0 %, maka motor benar-benar mati karena
tidak ada beda tegangan. Saat kondisi PWM 25 %, maka tegangan motor akan
diberikan pada seperempat periode. Ketika PWM dalam kondisi 50 %, maka motor
berputar dengan setengah karena tegangan rata-rata yang diberikan setengah dari
tegangan penuh. Pada saat PWM 75 %, maka tegangan motor akan diberikan pada
tiga perempat peride. Namun ketika PWM mencapai 100 %, maka motor akan
berputar dengan kecepatan penuh karena keluaran dari PWM 5 V terus menerus.

Materi Ajar : Pengantar Robotika (FSK 45311)
66
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
Pada dasarnya sebuah rangkaian penghasil PWM merupakan sebuah counter,
biasanya up and down counter, yang men-toggle keluarannya apabila mencapai nilai
tertentu. Ada beberapa mode operasi PWM pada mikrokontroler ATMega 8535,
namun akan dibahas dua mode saja, yaitu :
4.3.1. Fast PWM Mode.
Timer/Counter 1 dalam mode fast PWM digunakan untuk mengendalikan lama t
on dan t off melalui isi register pembanding OCR1A atau OCR1B yang akan
berakibat kepada besar duty cycle yang dihasilkan. Untuk saluran (channel) PWM
timer / counter 1 yaitu pin OC1A dan OC1B sebagai keluaran saluran PWM. Dalam
mode fast PWM sifat cacahan register pencacah TCNT1 mencacah dari BOTTOM
(0x0000) terus mencacah naik (counting up) hingga mencapai TOP (nilai maksimal
yang ditentukan sesuai resolusi yang diinginkan, misalnya resolusinya 10 bit, maka
nilai TOP = 0x03FF) kemudian mulai dari BOTTOM lagi dan begitu seterusnya atau
yang dinamakan single slope (satu arah cacahan).
Resolusi fast PWM dapat ditentukan dengan resolusi yang sudah tetap seperti 8,
9, 10 bit. Resolusi minimal yang diizinkan yaitu 2 bit (0x0003), dan resolusi
maksimal yang diizinkan yaitu 16 bit (0xFFFF). Resolusi dapat dihitung dengan
menggunakan persamaan (4.1).
…………………… (4.1)
Dalam mode output PWM pada ATMega 8535 mempunyai dua tipe output, yaitu
non-inverting dan inverting. Pada gambar 4.5 memperlihatkan grafik pulsa fast
PWM.
Dalam mode non-inverting saluran kelauaran PWM pin OC1x di clear pada
saat compare match (TCNT1 = OCRx) dan di set ketika BOTTOM (TCNT1 =
0x0000). Sedangkan dalam mode inverting saluran keluaran pin OC1x di set pada
saat compare match (TCNT1 = OCRx) dan di clear ketika BOTTOM (TCNT1 =
0x0000). Alasan penggunaan PWM jenis inverting dan non-inverting yaitu karena

Materi Ajar : Pengantar Robotika (FSK 45311)
67
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
terdapat dua jenis perangkat keras yang menggunakan PWM, yaitu yang
menggunakan active low dan yang menggunakan active high.
Perbedaan non-inverting dan inverting dalam mode fast PWM yaitu dilihat dari
bentuk pulsanya, dimana PWM non-inverting yang dikendalikan yaitu lama t on nya
melalui isi OCR1x, sedangkan PWM inverting yang dikendalikan yaitu lama t off
nya melaui isi OCR1x.
Gambar 4.5. Pulsa Fast PWM.
Adapun frekuensi fast PWM dihitung dengan menggunakan persamaan (4.2).
…………………… (4.2)
Dimana F clk_I/O yaitu frekuensi clock chip yang digunakan, sedangkan N yaitu
prescaler sumber clock yang digunakan (1,8,64,256,1024).
4.3.2. Phase Correct PWM Mode
Pada mode phase correct PWM, cara operasi cacahan register TCNT1 yaitu
menggunakan dual slope (dua arah cacahan / bolak-balik) dimana TCNT1 mencacah
dari BOTTOM (0x0000) counting up hingga mencapai TOP (resolusi yang

Materi Ajar : Pengantar Robotika (FSK 45311)
68
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
diinginkan) kemudian counting down hingga BOTTOM (0x0000) dan begitu
seterusnya.
Resolusi mode phase correct PWM dapat ditentukan dengan resolusi yang sudah
tetap seperti 8, 9, 10 bit. Resolusi minimal yang diizinkan yaitu 2 bit (0x0003), dan
resolusi maksimal yang diizinkan yaitu 16 bit (0xFFFF). Resolusi dapat dihitung
dengan menggunakan persamaan (4.3).
…………………… (4.3)
Dalam mode output PWM pada ATMega 8535 mempunyai dua tipe output,
yaitu non-inverting dan inverting. Pada gambar 4.7 memperlihatkan grafik pulsa
phase correct PWM.
Gambar 4.7. Pulsa Phase Correct PWM.
Dalam mode non-inverting saluran keluaran PWM pin OC1x di clear pada saat
compare match (TCNT1 = OCRx) ketika counting up dan di set pada saat compare
match ketika counting down. Sedangkan mode inverting saluran keluaran PWM pin

Materi Ajar : Pengantar Robotika (FSK 45311)
69
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
OC1x di set pada saat compare match (TCNT1 = OCRx) ketika counting up dan di
clear pada saat compare match ketika counting down.
Perbedaan non-inverting dan inverting dalam mode phase correct PWM yaitu
dilihat dari bentuk pulsanya, dimana PWM non-inverting yang dikendalikan yaitu
lama t on nya melalui isi OCR1x, sedangkan PWM inverting yang dikendalikan
yaitu lama t off nya melaui isi OCR1x.
Adapun frekuensi phase correct PWM dihitung dengan menggunakan
persamaan (4.4).
…………………… (4.4)
Dimana F clk_I/O yaitu frekuensi clock chip yang digunakan, sedangkan N yaitu
prescaler sumber clock yang digunakan (1,8,32,64,128,256,1024).
Frekuensi yang terlalu tinggi mengakibatkan pengaturan menggunakan PWM
tidak berpengaruh karena tegangan yang masuk terlalu rapat, hal tersebut tergantung
pada respon frekuensi dari motor DC yang digunakan.

Materi Ajar : Pengantar Robotika (FSK 45311)
70
Dr. Ir. Siti Nurmaini, M.T., Ahmad Zarkasi, M.T
DAFTAR PUSTAKA
1. Pitowarno E, 2006. Robotika Desain, Kontrol dan Kecerdasan Buatan. Buku Teks. Penerbit ANDI, Indonesia
2. Ming Xie, 2003. Fundamentals of Robotic: Linking Perception to Action. World Scientific Publishing Co.
3. Nurmaini, S. 2012. Intelligent Navigation for Embedded Mobile Robot: The Application of Embedded Controller. Lap Lambert Academic Publishing; ISBN: 9783659001055
4. Robin R. Murphy, 2000. Introduction to AI Robotic. A Bradford Book The MIT Press Cambridge, Massachusetts London, England
5. Jonathan Courbon, Youcef Mezouar dan Philippe Martinet, 2008. Indoor Navigation of a Non-Holonomic Mobile Robot Using a Visual Memory. Springer Science+Business Media, LLC 2008
6. Winoto A, 2008. Mikrokontroler AVR ATMega8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR. Buku Teks. Penerbit Informatika. Bandung, Indonesia