
Matematické modelovanie, riadenie a simulacné overenie...
35
Technická univerzita v Košiciach Fakulta elektrotechniky a informatiky Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov Konfernecia TECHNICOM 23.5.2018, Košice Ing. Jakub Čerkala, PhD. školiteľka: doc. Ing. Anna Jadlovská, PhD. Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 1
Transcript of Matematické modelovanie, riadenie a simulacné overenie...

Technická univerzita v KošiciachFakulta elektrotechniky a informatiky
Matematické modelovanie, riadenie a simulačné overeniemodelov mobilných robotov
Konfernecia TECHNICOM
23.5.2018, Košice
Ing. Jakub Čerkala, PhD.
školiteľka:doc. Ing. Anna Jadlovská, PhD.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 1

Obsah prezentácie
1. Motivácia pre výskum v oblasti mobilnej robotiky
2. Metodika pre modelovanie kolesových mobilných robotov
3. Modelové scenáre mobilného robota s diferenciálnym kolesovým podvozkom3.1 Základné modely mobilného robota s diferenciálnym kolesovým podvozkom3.2 Rozšírenie modelu mobilného robota o dynamiky aktuátorov3.3 Komplexný modelový scenár mobilného robota zahŕňajúci vplyvy povrchového trenia
4. Klasické prístupy pre riadenie kolesových mobilných robotov4.1 Reaktívne navigačné riadenie robota v rovine4.2 Navigačné riadenie robota založené na kinematickom modeli
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 2

Motivácia pre výskum v oblasti mobilnej robotiky
I výskumné a projektové zameranieskupiny výskumného CMMR a PI,
I prienik témy naprieč rôznymipríbuznými oblasťami výskumu ako
I robotické ramená a manipulátory,I multiagentové systémy,I diagnostika,I 3D grafika,I počítačové videnie a iné,
I priestor pre zahrnutie prostriedkov UI
I potenciál aplikačného využitiavýsledkov v pedagogike a praxi
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 3

Analytický pohľad na mobilný robot ako dynamický systémVýznam matematického modelu mobilného robota
čierna skrinkareálny model robota
I neznáma kinematika,I neznáme obmedzenia,I neznáma dynamika,I neznáme stavy.
šedá skrinkakinematický model robota
I známa kinematika,I kinematické obmedzenia,I neznáma dynamika,I neznáme stavy.
biela skrinkamatematický model robota
I známa kinematika,I fyzikálne obmedzenia,I dynamika je určená,I stavy sú známe.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 4

Uvažovaný mobilný robot s diferenciálnym podvozkomLaboratórny model – mobilný robot slúžiaci ako koncepčná predloha matematického modelu v práci
Laboratórny model
I zdroj reálnych dát vhodných preexperimentálnu identifikáciu,
I zvyčajne sa jedná o uzavretýsystém s pevnými parametrami avlastným riadením.
Analyticky zostavený simulačný model
I široká variabilita parametrov robota,I aproximácia aj nemerateľných stavových veličín,I dynamiku aj riadeného robota je možné
aproximovať v rôznej úrovni presnosti.Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 5
Metodika pre odvodenie matematického modelu robotaZískanie kinematiky a aproximácie dynamiky mobilného robota - modelové scenáre
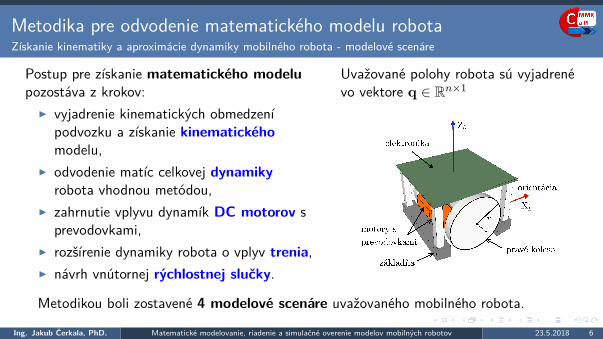
Postup pre získanie matematického modelupozostáva z krokov:
I vyjadrenie kinematických obmedzenípodvozku a získanie kinematickéhomodelu,
I odvodenie matíc celkovej dynamikyrobota vhodnou metódou,
I zahrnutie vplyvu dynamík DC motorov sprevodovkami,
I rozšírenie dynamiky robota o vplyv trenia,I návrh vnútornej rýchlostnej slučky.
Uvažované polohy robota sú vyjadrenévo vektore q ∈ R𝑛×1
Metodikou boli zostavené 4 modelové scenáre uvažovaného mobilného robota.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 6
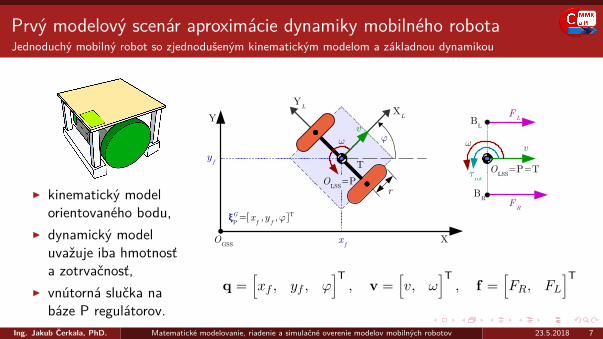
Prvý modelový scenár aproximácie dynamiky mobilného robotaJednoduchý mobilný robot so zjednodušeným kinematickým modelom a základnou dynamikou
I kinematický modelorientovaného bodu,
I dynamický modeluvažuje iba hmotnosťa zotrvačnosť,
I vnútorná slučka nabáze P regulátorov.
q =[𝑥𝑓 , 𝑦𝑓 , 𝜙
]T, v =
[𝑣, 𝜔
]T, f =
[𝐹𝑅, 𝐹𝐿
]T
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 7

Prvý modelový scenár aproximácie dynamiky mobilného robotaZhrnutie výhod a nevýhod aproximácie dynamiky robota prvým modelovým scenárom
I uvedená základná, hrubá aproximácia jevýhodnejšia ako iba samotný kinematickýmodel robota,
I matematický model je jednoduchéimplementovať ako simulačný model,
I fyzikálna interpretácia chovania robota jeznačne skreslená,
I návrh zosilnení P-regulátorov riadenia jesubjektívny, neodzrkadľuje skutočné akčnézásahy,
I model nie je vhodný pre otvorenú slučku.Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 8

Druhý modelový scenár aproximácie dynamiky mobilného robotaMobilný robot definovaný v ťažisku a dynamikou odvodenou Newton-Eulerovým postupom
I kinematický modeluvažovaný v ťažisku,
I Newtonov-Eulerovdynamický model,
I vnútorná slučka nabáze inverznejdynamiky. q =
[𝑥𝑡, 𝑦𝑡, 𝜙
]T, v =
[𝑣, 𝜔
]T, 𝜏 =
[𝜏𝑅 𝜏𝐿
]T
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 9

Druhý modelový scenár aproximácie dynamiky mobilného robotaZhrnutie výhod a nevýhod aproximácie dynamiky robota druhým modelovým scenárom
I čiastočne presnejšia, ale len približnáaproximácia chovania robota,
I potenciálna možnosť dokonaléhosledovania referenčnej trajektórie,
I fyzikálna interpretácia chovania robota prilineárnom pohybe je nepostačujúca,
I náročnejší návrh a realizácia riadenia,I model nie je vhodný pre otvorenú slučku.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 10

Tretí modelový scenár aproximácie dynamiky mobilného robotaMobilný robot s dynamikou získanou pomocou Lagrangeovho prístupu vrátane DC motorov
I kinematický modelpre bod na osi X𝐿,
I Lagrangeov model,I zahrnutá dynamika
DC motorov,I PI regulátory. q =
[𝑥𝑡, 𝑦𝑡, 𝜙
]T, v =
[𝑣, 𝜔
]T, u =
[𝑢𝑅 𝑢𝐿
]T
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 11

Tretí modelový scenár aproximácie dynamiky mobilného robotaZhrnutie charakteristických vlastností v dynamike robota
Charakteristické vlastnostizostaveného modelu:
I fyzikálne presnejšiaaproximácia chovania,
I uvažovanie obmedzeníaktuátorov a riadenia,
I model systému vhodnýpre syntézu riadenia,
I využitie modelu aj votvorenej slučke,
I absencia povrchovéhotrenia.
Referenčný bod P je posunutý voči ťažisku o vzdialenosť𝑑 v zmysle natočenia robota.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 12

Štvrtý modelový scenár aproximácie dynamiky mobilného robotaKomplexný mobilný robot s dynamikou získanou pomocou Lagrangeovho prístupu vrátane DC motorov a trenia
I kinematický model vľubovoľnom bode,
I Lagrangeov model,I zahrnutá dynamika
DC motorov,I povrchové trenie,I PI regulátory.
q =[𝑥𝑓 , 𝑦𝑓 , 𝜙, 𝜃𝑅, 𝜃𝐿
]T, 𝜂 =
[𝜔𝑅, 𝜔𝐿
]T, u =
[𝑢𝑅 𝑢𝐿
]T
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 13

Štvrtý modelový scenár aproximácie dynamiky mobilného robotaMatematický a stavový model aproximácie mobilného robota - bez riadenia
Matematický model 4. modelového scenára
q = S(q)𝜂 (1)M(𝜂)�� + V(q, q)𝜂 + F(𝜂, 𝜏 m − 𝜏 z) = B(q)𝜏 m − B(q)𝜏z (2)
Lm𝑑i𝑑𝑡
+ Rmi + 𝑁602𝜋
Ke𝜂 = u (3)
pričom platia väzby
qP = SP(q)𝜂 (4)𝜏 m = 𝑁K𝜏 i (5)
Stavový opis aproximácie mobilného robota
𝑑
𝑑𝑡
⎡⎢⎣qP𝜂i
⎤⎥⎦ =
⎡⎢⎣0 SP(q) 00 −M−1(q)
[V(q, q) + F(𝜂, 𝜏 m − 𝜏 z)
]M−1(q)B(q)𝑁K𝜏
0 −L−1m
602𝜋 𝑁Ke −L−1
m Rm
⎤⎥⎦⎡⎢⎣q
𝜂i
⎤⎥⎦
+
⎡⎢⎣ 00
L−1m
⎤⎥⎦ u +
⎡⎢⎣ 0−M−1(q)B(q)
0
⎤⎥⎦ 𝜏 z
(6)Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 14

Štvrtý modelový scenár aproximácie dynamiky mobilného robotaKinematický model - vyjadrenie rýchlostí referenčného bodu robota v rovine
Navrhnutá metodikaumožňuje určiťkinematické obmedzeniapre referenčný bod Pzvolený ľubovoľne v LSSpodvozku robota.
Referenčný bod leží mimo počiatku LSS a ťažiska.Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 15

Štvrtý modelový scenár aproximácie dynamiky mobilného robotaOdvodenie dynamického modelu pomocou Lagrangeovej metódy doplnený o Tustinov model trenia
Dynamický model aproximácie mobilného robota s trením je vyjadrený maticovo ako
M(q)��+V(q, q)𝜂 + F(𝜂, 𝜏 m − 𝜏 z) = B(q)𝜏 m − B(q)𝜏z (7)
Výsledné točivé momenty motorov kolies sú
𝜏𝑅 = 𝑁k𝜏 𝑖𝑅 − 𝐵z ekv𝜔𝑅 − 𝜏𝑓𝑠𝑅 − 𝜏z𝑅 (8)𝜏𝐿 = 𝑁k𝜏 𝑖𝐿 − 𝐵z ekv𝜔𝐿 − 𝜏𝑓𝑠𝐿 − 𝜏z𝐿 (9)
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 16

Štvrtý modelový scenár aproximácie dynamiky mobilného robotaKonceptuálna bloková schéma
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 17

Štvrtý modelový scenár aproximácie dynamiky mobilného robotaZhrnutie implementovaných vnútorných vplyvov a väzieb na dynamiku robota
Uvažované vnútorné väzby:I diskrétna slučka URO,I kinematické obmedzenia,I viskózne trenie rotorov,I odstredivá sila,I povrchové trenie kolies,I viskózne trenie ložísk,I spätná EM sila motorov,I autoindukcia vo vinutí,I pomer prevodovky,I pôsobenie porúch.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 18

Navigačné riadenie mobilného robota v rovine
Polárne súradnice 𝜌, 𝛼, 𝛽 vyjadrujú odchýlkyžiadanej pozície od aktuálnej pozície mobilnéhorobota reprezentovanej v referenčnom bode P.
Riadenie robota môže závisieť odI interných senzorov,I externých senzorov,I konštrukcie,I alebo realizovateľnosti
riadenia.Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 19

Reaktívne riadenie mobilného robota v rovineKrokové postupné riadenie robota do bodu bez plánovania pohybu
Riadenie založené na postupnom prepínaní polárnychodchýlok a minimalizácii iba jedinej odchýlky naraz.
I vhodné pre maticové prostredie,I jednoduchá realizácia,I neprirodzený pohyb robota,I nevhodné pre pohyb po krivke.
Pohyb robota má charakterčastého prepínania v okolícieľového bodu.
Sledovanie rýchlostí
0 1 2 3 4 5 6 7 8−0.5
0
0.5
1
Linearnerychlosti
v1,v2,v3[m
.s−1]
Krokove postupne riadenie do statickeho bodu - sledovanie linearnej rychlosti
v1 - kinematicky, eα = 1◦
v2 - s dynamikou, eα = 1◦
v3 - s dynamikou, eα = 2◦
0 1 2 3 4 5 6 7 8−3
−2
−1
0
1
Cas simulacie t [s]
Uhloverychlosti
ω1,ω2,ω3[rad.s−1]
Krokove postupne riadenie do statickeho bodu - sledovanie uhlovej rychlosti
ω1 - kinematicky, eα = 1◦
ω1 - s dynamikou, eα = 1◦
ω3 - s dynamikou, eα = 2◦
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 20

Reaktívne riadenie mobilného robota v rovineReaktívne plynulé riadenie robota do bodu
Možnosť hľadať cieľ, plynulá minimalizácia odchýlok.I vhodné pre maticové prostredie a krivky s malým
zakrivením,I nevhodné pre pohyb po krivke s veľkým
zakrivením.
Zatáčanie je závislé na rozsahucitlivosti senzora umiestnenom vprednej časti robota.
Senzorický rozsah robota
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 21

Reaktívne riadenie mobilného robota v rovineReaktívne plynulé riadenie robota do bodu
Zmeny rýchlostí do cieľového bodu
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
Linearnerychlosti
v1,v2,v3[m
.s−1]
Reaktıvne plynule riadenie do bodu - sledovanie linearnej rychlosti
v1 - kinematicky, δ = 10◦
v2 - s dynamikou, δ = 10◦
v3 - s dynamikou, δ = 15◦
0 1 2 3 4 5 6−1.5
−1
−0.5
0
0.5
Cas simulacie t [s]
Uhloverychlosti
ω1,ω2,ω3[rad.s−1]
Reaktıvne plynule riadenie do bodu - sledovanie uhlovej rychlosti
Minimalizácia pozičnej chyby robota
0 1 2 3 4 5 60
0.5
1
1.5
Odchylky
ρ1,ρ2,ρ3[m
]
Minimalizacia odchylky uhloveho vzdialenosti ρ
ρ1 - kinematicky, δ = 10◦
ρ2 - s dynamikou, δ = 10◦
ρ3 - s dynamikou, δ = 15◦
0 1 2 3 4 5 6−150
−100
−50
0
Cas simulacie t [s]
Odchylky
α1,α2,α3[◦]
Minimalizacia odchylky uhloveho natocenia α
α1 - kinematicky, Kα = 2
α2 - s dynamikou, Kα = 2
α3 - s dynamikou, Kα = 4
Výhoda uvažovaného typu riadenia spočíva v prirodzenejšom pohybe vo väčšejvzdialenosti od cieľa.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 22

Reaktívne riadenie mobilného robota v rovineReaktívne plynulé riadenie robota do bodu založené na spätnej väzbe
Riadenie je založené minimalizácii odchýlok naraz.I univerzálny typ spätno-väzobného riadenia,I jednoduchá realizácia,I voľba koeficientov regulátorov je čiastočne
subjektívna,I iba lokálna stabilita.
Lineárny a rotačný pohyb súriadené nezávislo.
Sledovanie rýchlostí
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
Linearnerychlosti
v1,v2,v3[m
.s−1]
Reaktıvne plynule riadenie do statickeho bodu - sledovanie linearnej rychlosti
v1 - kinematicky, Kα = 2v2 - s dynamikou, Kα = 2v3 - s dynamikou, Kα = 4
0 1 2 3 4 5 6 7 8−3
−2
−1
0
1
Cas simulacie t [s]
Uhloverychlosti
ω1,ω2,ω3[rad.s−1]
Reaktıvne plynule riadenie do statickeho bodu - sledovanie uhlovej rychlosti
ω1 - kinematicky, Kα = 2ω2 - s dynamikou, Kα = 2ω3 - s dynamikou, Kα = 4
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 23

Reaktívne riadenie mobilného robota v rovinePomerové reaktívne riadenie diferenciálne riadeného mobilného robota
Špeciálne riadenie aplikovateľné pre dvojkolesovýdiferenciálne riadený podvozok.
I vhodné pre sledovanie krivky snímanej senzorom,I intuitívne nastavovanie regulátorov,I vyžaduje sústavný pohyb robota a neostré
trajektórie.
Pohyb robota v rovine pokruhovej trase
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Pomerove reaktıvne riadene mobilne roboty v rovine
Poloha v osi X [m]
Polohavosi
Y[m
]
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 24

Spätno-väzobné riadenie založené na kinematickom modeli robota
I jednoduchosť realizácie,I simultánna minimalizácia všetkých odchýlok,I vyjadrenie rozsahov prípustných zosilnení,I riadenie aj s cúvaním,I trvalá regulačná odchýlka pri pohybe.
𝜌 =√
(𝑥ref − 𝑥)2 + (𝑦ref − 𝑦)2
𝛼 = tan−1(
𝑦ref − 𝑦
𝑥ref − 𝑥
)− 𝜙 + 𝜋
𝛽 = 𝜙ref − 𝛼 − 𝜙
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 25

Spätno-väzobné riadenie založené na kinematickom modeli robotaSimulačné overenie - riadenie do pozície z jej blízkeho okolia
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Suradnica v osi X [m]
Suradnicavosi
X[m
]
Kinematicke riadenie robota v rovine - stabilne aj v smere
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Suradnica v osi X [m]Suradnicavosi
X[m
]
Kinematicke riadenie robota v rovine - stabilne aj v smere
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 26

Spätno-väzobné riadenie založené na kinematickom modeli robotaSimulačné overenie - sledovanie pohybujúceho sa referenčného bodu
0 0.2 0.4 0.6 0.8
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Kinematicke navigacne riadenie - sledovanie bodu po priamke
Poloha v osi X [m]
Polohavosi
Y[m
]
Ciel riadeniaStop: [0.87 m, 0.5 m, 30◦]Kinematicky robotStop: [0.86 m, 0.5 m, 30◦]Robot s dynamikouStart: [0 m, -0.5 m, 0◦]Stop: [0.86 m, 0.5 m, 30◦]
Riadenie je plynulé, pôsobí prirodzene aje použiteľné aj pre sledovaniepohybujúceho sa cieľa v rovine.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Kinematicke navigacne riadenie do bodu bez prepınania smeru
Poloha v osi X [m]
Polohavosi
Y[m
]
Ciel riadeniaStop: [0 m, 0 m, 135◦]Kinematicky robotStop: [6.1e-05 m, -6.1e-05 m, 135◦]Robot s dynamikouStart: [1 m, 0.5 m, 0◦]Stop: [0.00012 m, -0.00012 m, 135◦]
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 27

Spätno-väzobné riadenie založené na kinematickom modeli robotaSimulačné overenie - sledovanie pohybujúceho sa referenčného bodu
−0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Kinematicke navigacne riadenie - sledovanie bodu po tvare
Poloha v osi X [m]
Polohavosi
Y[m
]
Ciel riadeniaStop: [1.5 m, 0 m, 90◦]
Kinematicky robot
Start: [0.8 m, 0 m, 0◦]
Stop: [1.1 m, -0.75 m, 31.3◦]
Robot s dynamikou
Stop: [1.1 m, -0.76 m, 31.2◦]
0 1 2 3 4 5 6 7 8 9 100
0.5
1
Linearnarychlost
[m.s−1]
Cas simulacie t [s]
Sledovanie linearnej a uhlovej rychlostı
0 1 2 3 4 5 6 7 8 9 10−5
0
5
Uhlovarychlost
ωt[rad.s−1]
referencna linearnaskutocna linearnareferencna uhlovaskutocna uhlova
0 1 2 3 4 5 6 7 8 9 10−50
0
50
Cas simulacie t [s]
τR,τL[m
N.m
]
Tocive momenty vyvyjane motormi kolies
pravy motor
lavy motor
limity momentov
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 28

Riadenie robota s využitím dopredného a spätno-väzobného riadeniaSledovanie referenčnej trajektórie mobilným robotom s využitím dopredného a spätno-väzobného riadenia
I spojenie výhod dopredného a spätno-väzobného riadenia,I dopredné riadenie riadi robot po predpísanej trajektórii,I spätno-väzobné riadenie minimalizuje odchýlky v pozícii,I sledovanie trajektórie je v pozícii a aj v čase bez trvalej regulačnej odchýlky.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 29

Riadenie robota s využitím dopredného a spätno-väzobného riadeniaSledovanie referenčnej trajektórie mobilným robotom s využitím dopredného a spätno-väzobného riadenia
Celkový akčný zásah je súčtomakčných zásahov jednotlivýchregulátorov
u = vff + vfb
pričom odchýlková pozícia robotaje definovaná ako⎡⎢⎣𝑒1
𝑒2𝑒3
⎤⎥⎦ =
⎡⎢⎣ cos 𝜙 sin 𝜙 0− sin 𝜙 cos 𝜙 0
0 0 1
⎤⎥⎦⎡⎢⎣𝑥ref − 𝑥
𝑦ref − 𝑦𝜙ref − 𝜙
⎤⎥⎦ Odchýlky od referenčnej trajektórie súminimalizované simultánne a to oddelenýmiregulátormi – dopredným a spätno-väzobným.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 30

Riadenie robota s využitím dopredného a spätno-väzobného riadeniaSledovanie referenčnej trajektórie mobilným robotom s využitím dopredného a spätno-väzobného riadenia
Charakter riadenia je určený v zmyslenastavovania parametrov regulátora.
−0.2 0 0.2 0.4 0.6 0.8 1
−0.2
−0.1
0
0.1
0.2
0.3
Sledovanie referencnej trajektorie - pohyb po usecke so zastavenım
Poloha v osi X [m]
Polohavosi
Y[m
]
Referencna trajektoriaStart: [0.00 m, 0.00 m, 15.000◦]Stop: [0.97 m, 0.26 m, 15.000◦]Robot s dynamikou, ζ = 0.25Start: [0.00 m, -0.20 m, 45.000◦]Stop: [0.97 m, 0.26 m, 15.650◦]Robot s dynamikou, ζ = 0.75Stop: [0.97 m, 0.26 m, 15.001◦]
0 2 4 6 8 10 12
0
0.1
0.2
0.3
0.4
v1,v2[m
.s−1]
Sledovanie referencnych linearnych rychlostı
v1 pre ζ = 0.25v2 pre ζ = 0.75referencne rychlosti
0 2 4 6 8 10 12−1
0
1
2
Cas simulacie t [s]
ω1,ω2[rad.s−1]
Sledovanie referencnych uhlovych rychlostı
ω1 pre ζ = 0.25ω2 pre ζ = 0.75referencne rychlosti
Robot dobehne referenčný vozík a sledujeho so zastavením v koncovom bode.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 31

Riadenie robota s využitím dopredného a spätno-väzobného riadeniaSledovanie referenčnej trajektórie mobilným robotom s využitím dopredného a spätno-väzobného riadenia
−0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sledovanie referencnej trajektorie - pohyb po trajektorii ”Limacon of Pascal”
Poloha v osi X [m]
Polohavosi
Y[m
]
Referencna trajektoriaStart: [1.50 m, 0.00 m, 90.000◦]Stop: [1.50 m, 0.00 m, 90.000◦]Robot s dynamikou, ζ = 0.25Start: [1.00 m, -0.20 m, 45.000◦]Stop: [1.47 m, -0.02 m, 90.264◦]Robot s dynamikou, ζ = 0.75Stop: [1.50 m, -0.00 m, 89.827◦]
Odchýlka v poslednom bode je spôsobenádynamikou a najmä diskrétnou realizáciouriadenia pozície robota.
0 1 2 3 4 5 6 7 8 9 100
1
2
3
v1,v2[m
.s−1]
Sledovanie referencnych linearnych rychlostı
v1 pre ζ = 0.25v2 pre ζ = 0.75referencne rychlosti
0 1 2 3 4 5 6 7 8 9 10−5
0
5
10
Cas simulacie t [s]
ω1,ω2[rad.s−1]
Sledovanie referencnych uhlovych rychlostı
ω1 pre ζ = 0.25ω2 pre ζ = 0.75referencne rychlosti
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 32

Simulačné overenie modelového scenára v navigačnom riadení
Simulačný model, ktorý realizuje štvrtý modelový scenár aproximácie mobilného robotabol overený simulačnými experimentami v otvorenej a uzavretej slučke.
11.2
1.41.6
1.8
0.9
1
1.1
Pohyb mobilnych robotov pri skokovych zmenach rychlostı
Poloha v osi X [m]
Poloha v osi Y [m]
Referencny robot
Robot 1Robot 2
V rámci naprogramovanej Knižnice simulačných modelov kolesových mobilnýchrobotov bola realizovaná aj offline 3D vizualizácia s animáciou pohybu.
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 33

Knižnica simulačných modelov kolesových mobilných robotov
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 34

Ďakujem za pozornosť
Ing. Jakub Čerkala, PhD. Matematické modelovanie, riadenie a simulačné overenie modelov mobilných robotov 23.5.2018 35


















