
Machine Vision for Collaborative Robot Applications
24
Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation
Transcript of Machine Vision for Collaborative Robot Applications

Machine Vision for Collaborative Robot Applications
David L. Dechow
FANUC America Corporation
Machine Vision for Collaborative Robot Applications
Topics
• Overview of collaborative robot technologies
• The roles for machine vision
• It’s still machine vision - Unique challenges
• Applications and future trends
• A disclaimer…
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
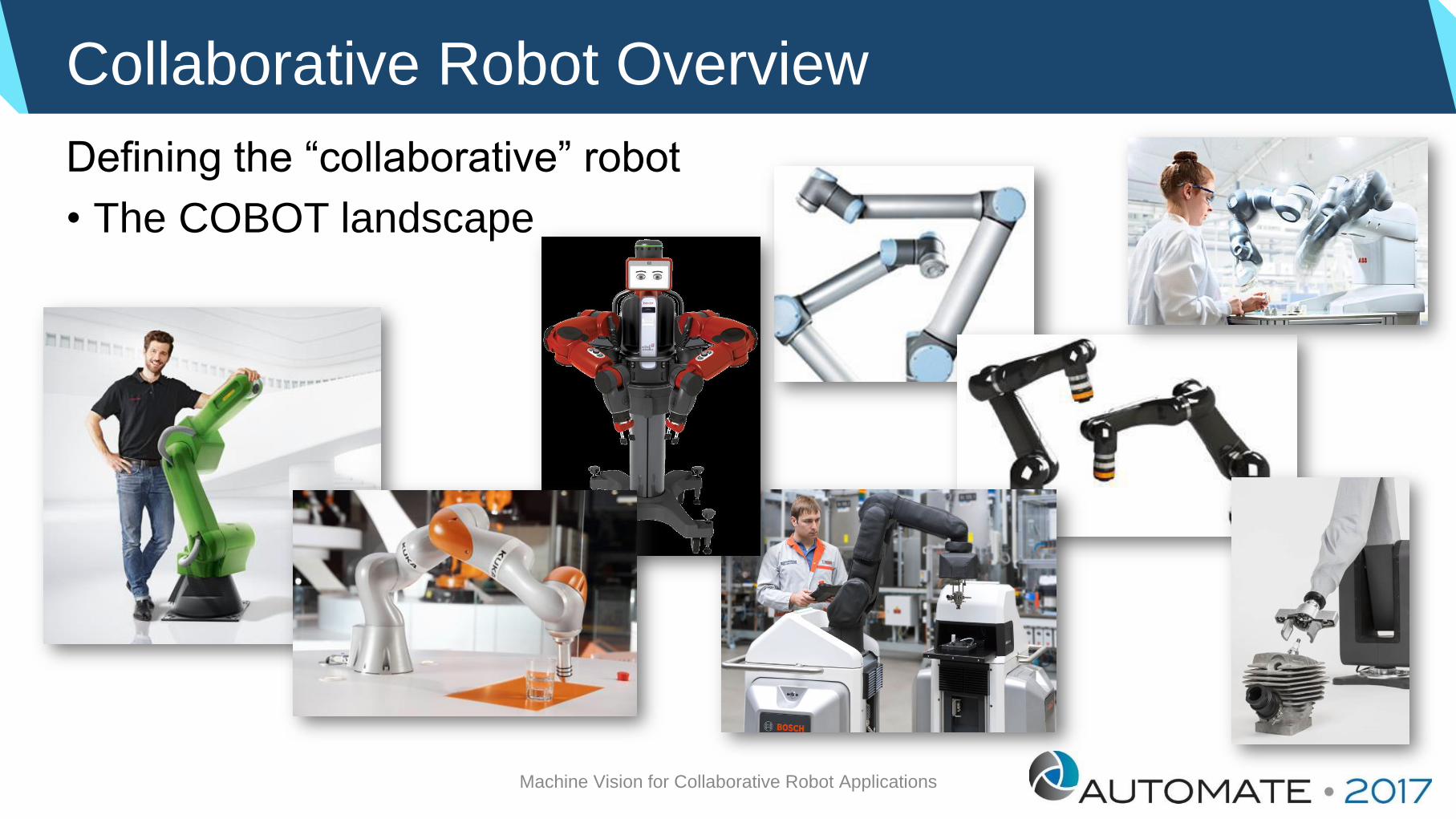
Defining the “collaborative” robot
• The COBOT landscape
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
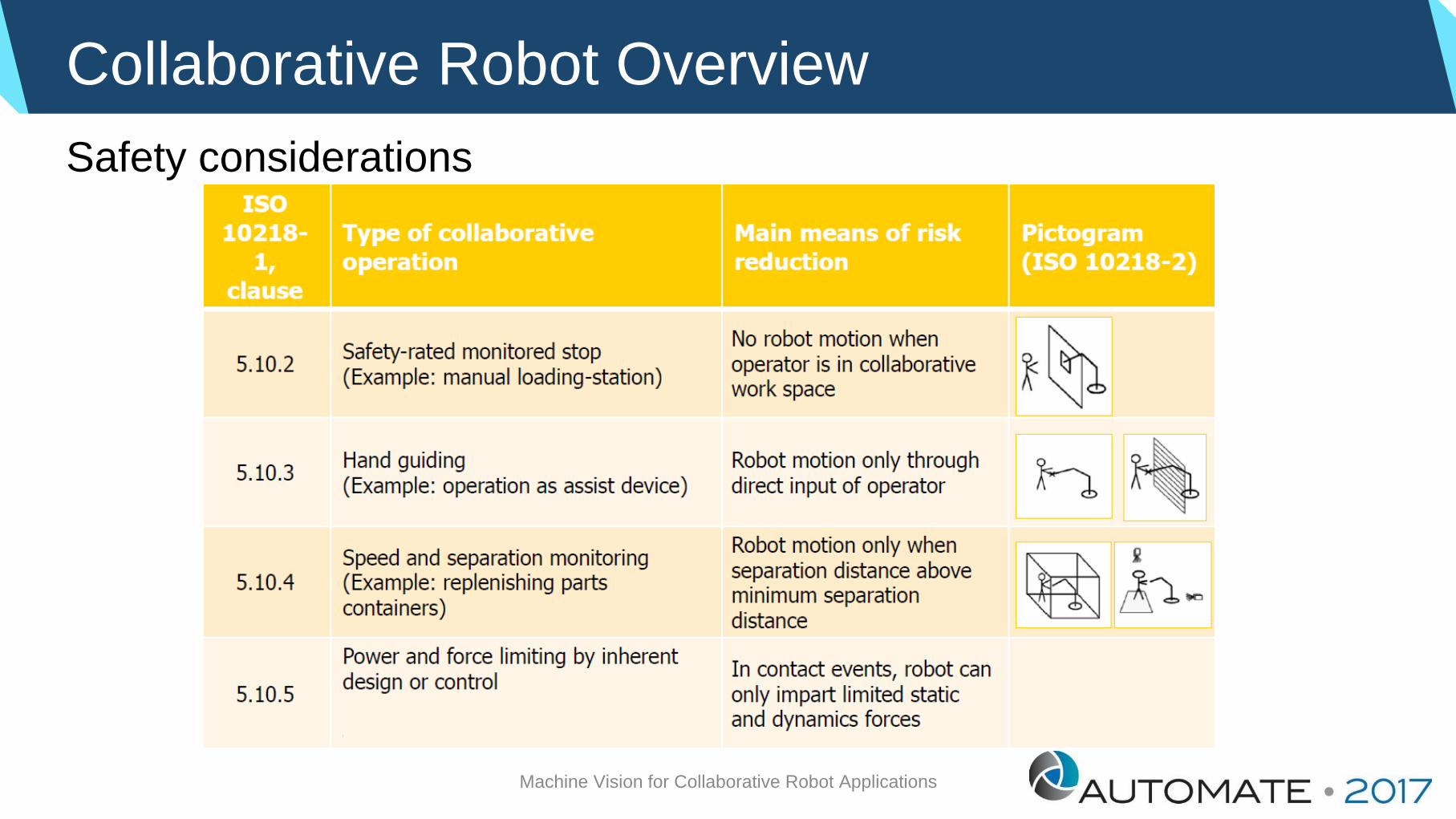
Safety considerations
• ANSI/RIA specifications
• ISO/TS 15066
• How they might be implemented
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
Safety considerations
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
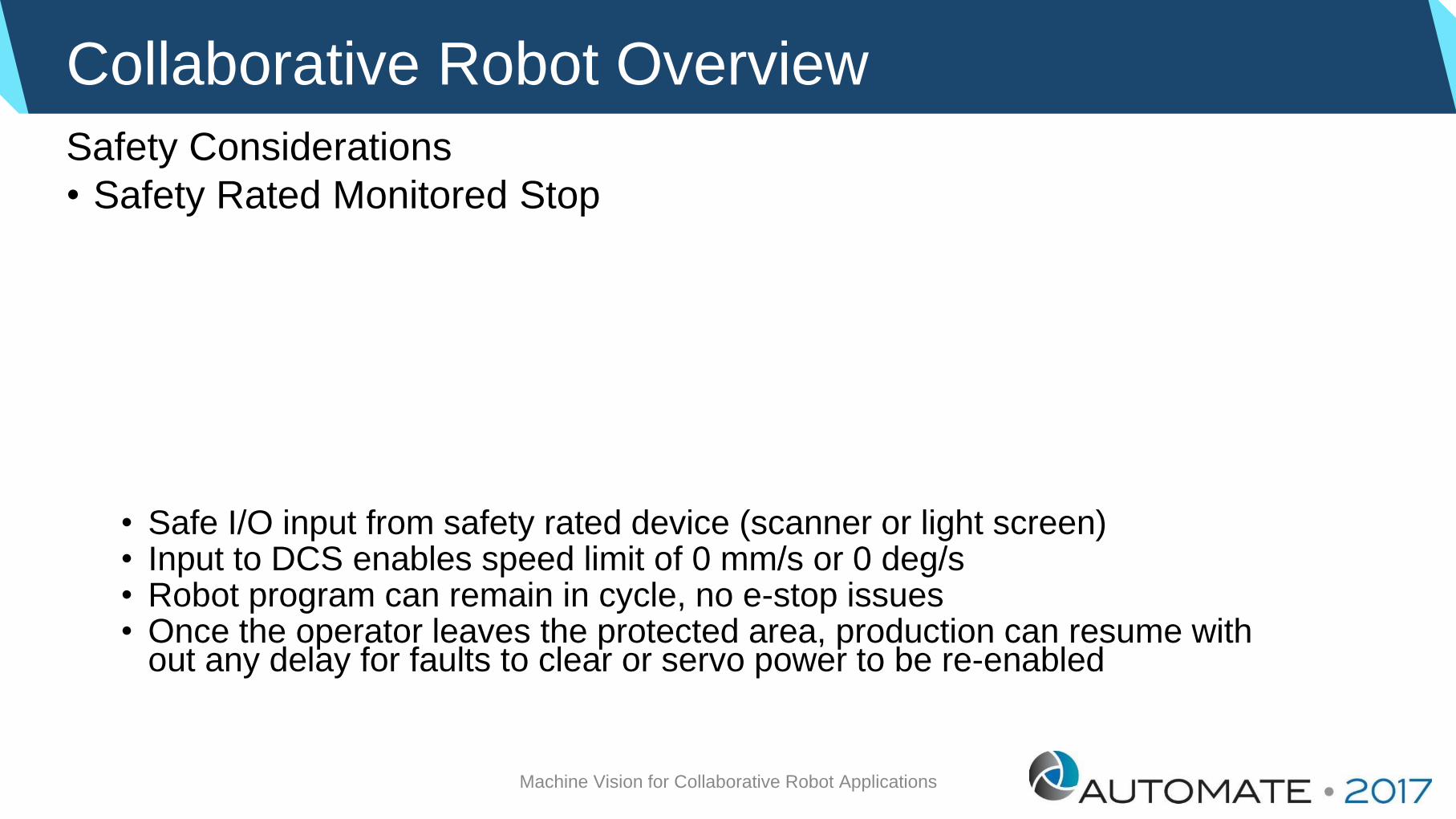
Safety Considerations
• Safety Rated Monitored Stop
• Safe I/O input from safety rated device (scanner or light screen)• Input to DCS enables speed limit of 0 mm/s or 0 deg/s• Robot program can remain in cycle, no e-stop issues• Once the operator leaves the protected area, production can resume with
out any delay for faults to clear or servo power to be re-enabled
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
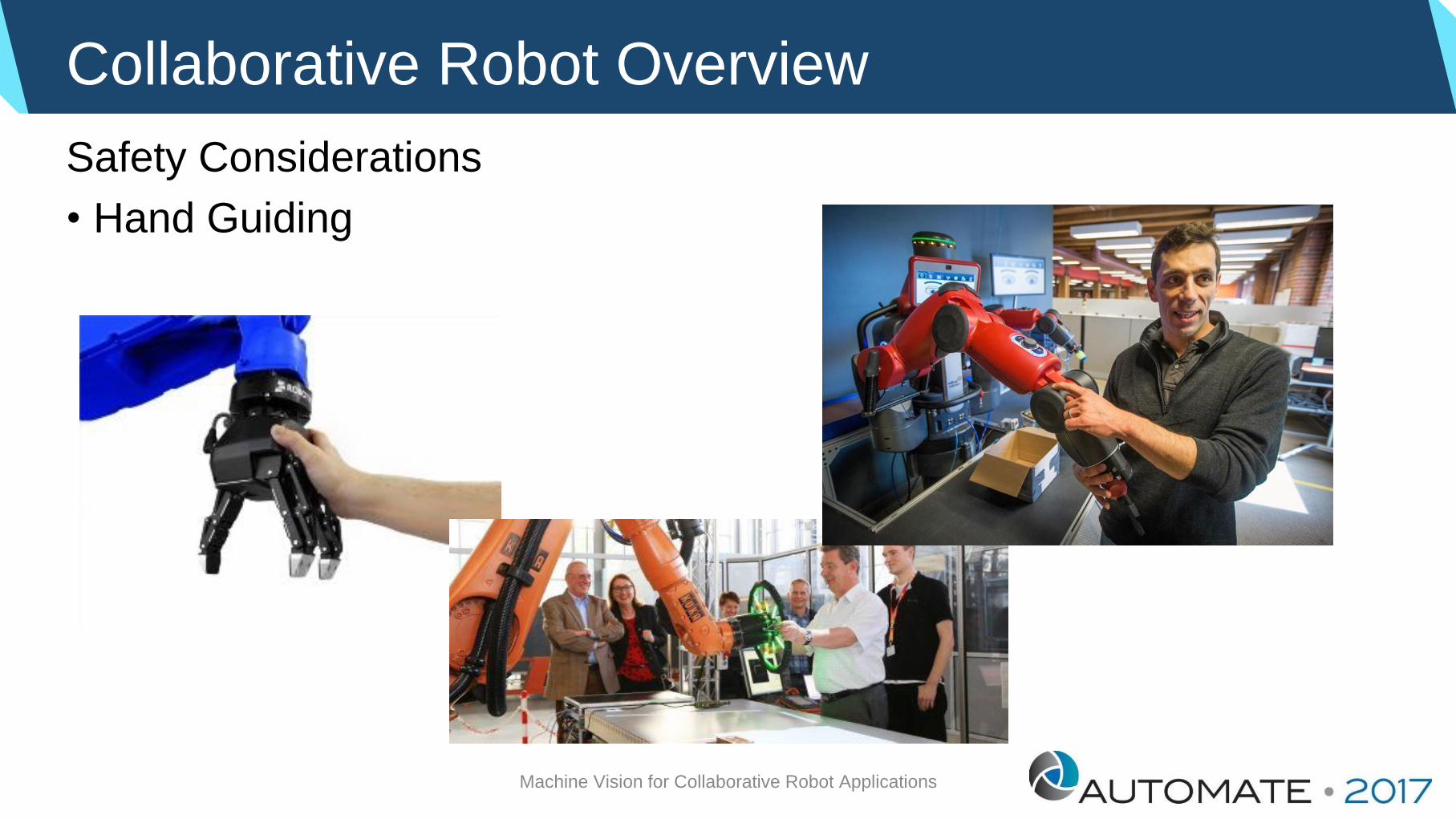
Safety Considerations
• Hand Guiding
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
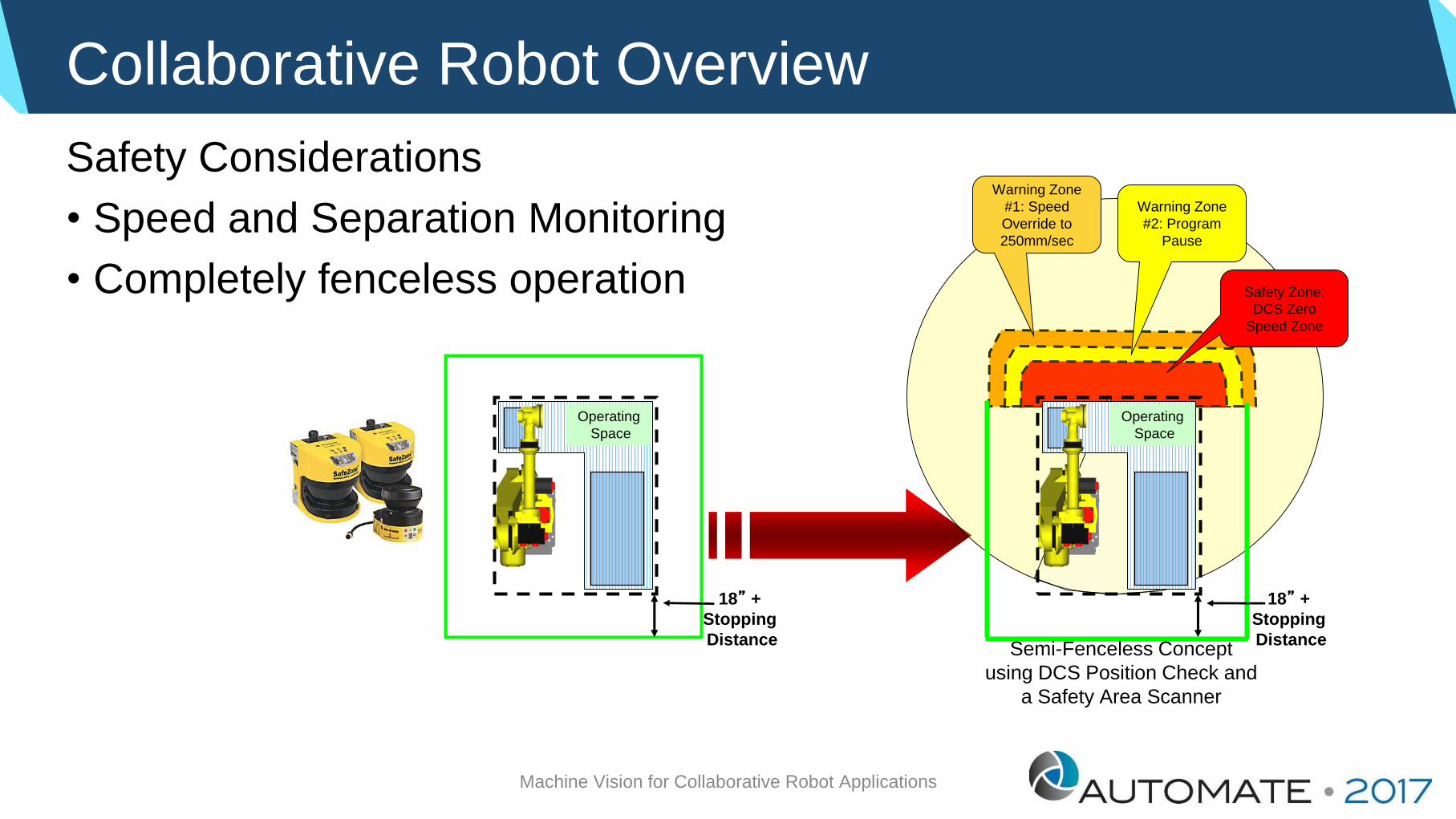
Safety Considerations
• Speed and Separation Monitoring
• Completely fenceless operation
Machine Vision for Collaborative Robot Applications
18” +
Stopping
Distance
Operating
Space
18” +
Stopping
Distance
Operating
Space
Semi-Fenceless Concept
using DCS Position Check and
a Safety Area Scanner
Safety Zone:
DCS Zero
Speed Zone
Warning Zone
#2: Program
Pause
Warning Zone
#1: Speed
Override to
250mm/sec
Collaborative Robot Overview
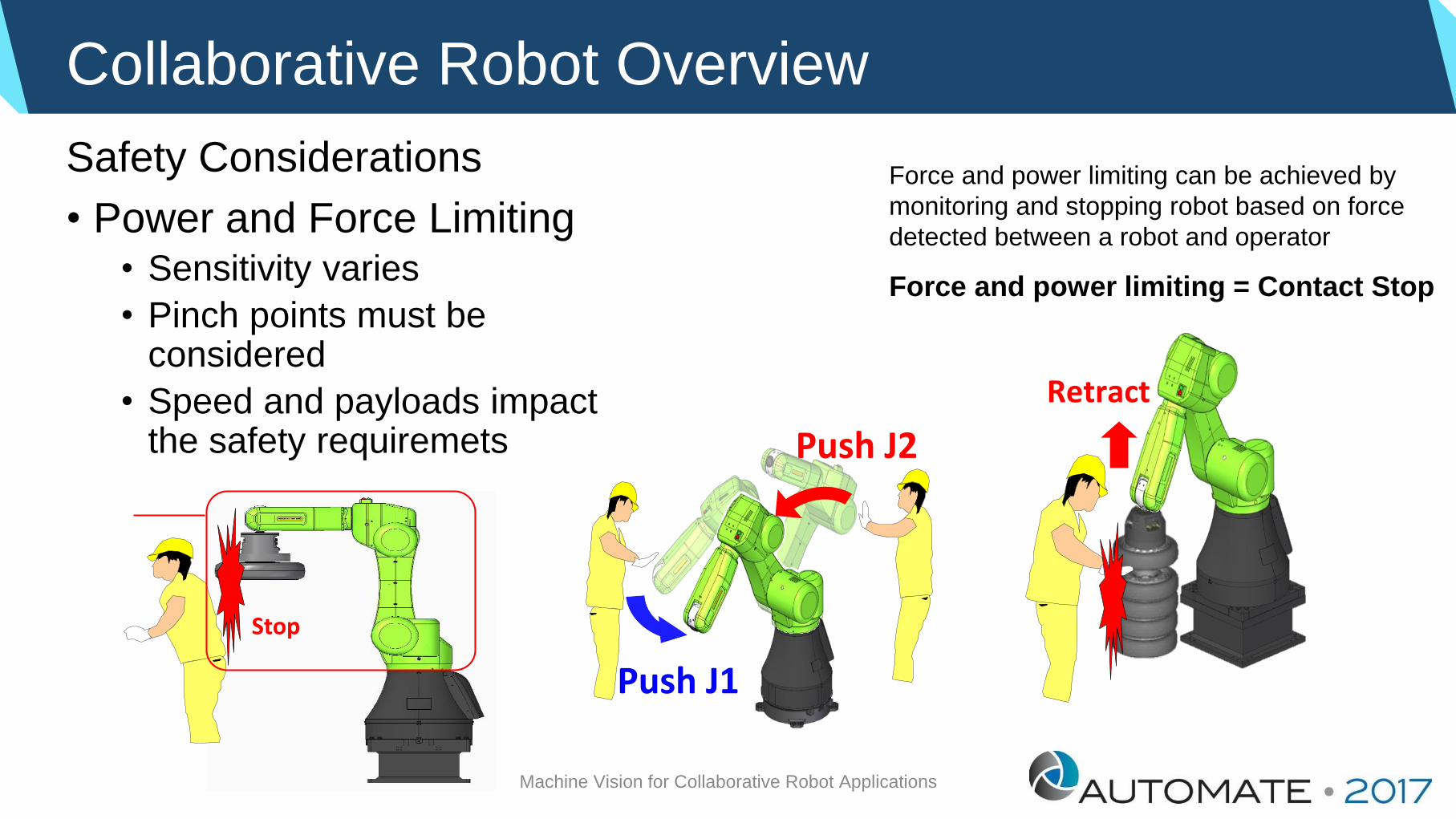
Safety Considerations
• Power and Force Limiting• Sensitivity varies
• Pinch points must beconsidered
• Speed and payloads impactthe safety requiremets
Machine Vision for Collaborative Robot Applications
Force and power limiting can be achieved by
monitoring and stopping robot based on force
detected between a robot and operator
Force and power limiting = Contact Stop
Stop
Push J2
Push J1
Retract
Collaborative Robot Overview
Safety Considerations
• Integrators and/or Users MUST do a risk assessment• Having a collaborative robot in the cell does not make the entire cell safe
• Design must mitigate hazards in other cell components including the part and tooling
• Possible contact between a person and robot must not result in injury
• What are appropriate values for force, when the operator and robot collide, without causing pain or injury
• The international standards groups have been looking at this problem and have preliminary guidance for what is appropriate based on medical studies
• This needs to be balanced with the tasks and possible contacts within a cell
• ISO TS15066 helps address these questions
Machine Vision for Collaborative Robot Applications
Collaborative Robot Overview
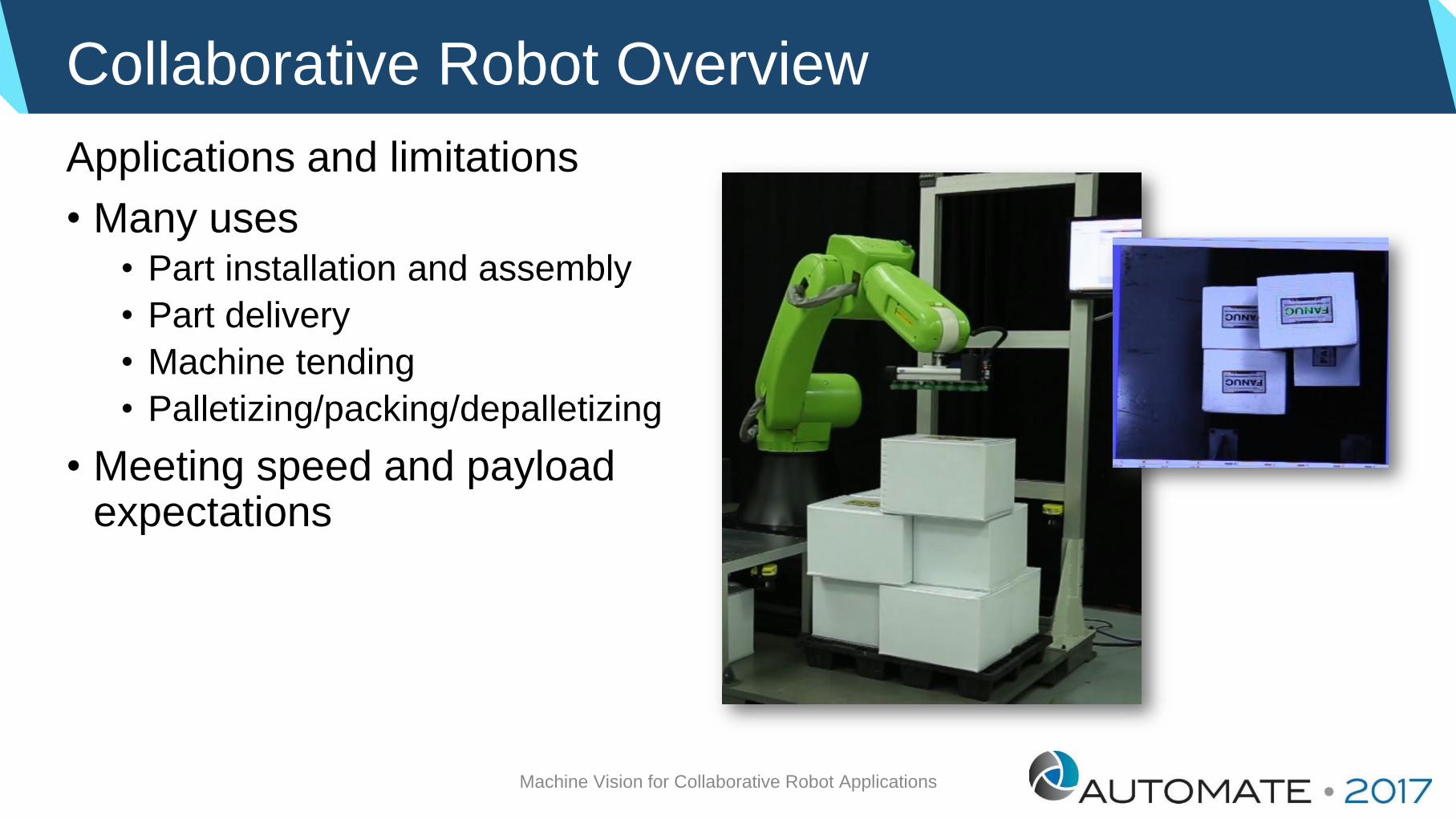
Applications and limitations
• Many uses • Part installation and assembly
• Part delivery
• Machine tending
• Palletizing/packing/depalletizing
• Meeting speed and payload expectations
Machine Vision for Collaborative Robot Applications
The Roles For Machine Vision
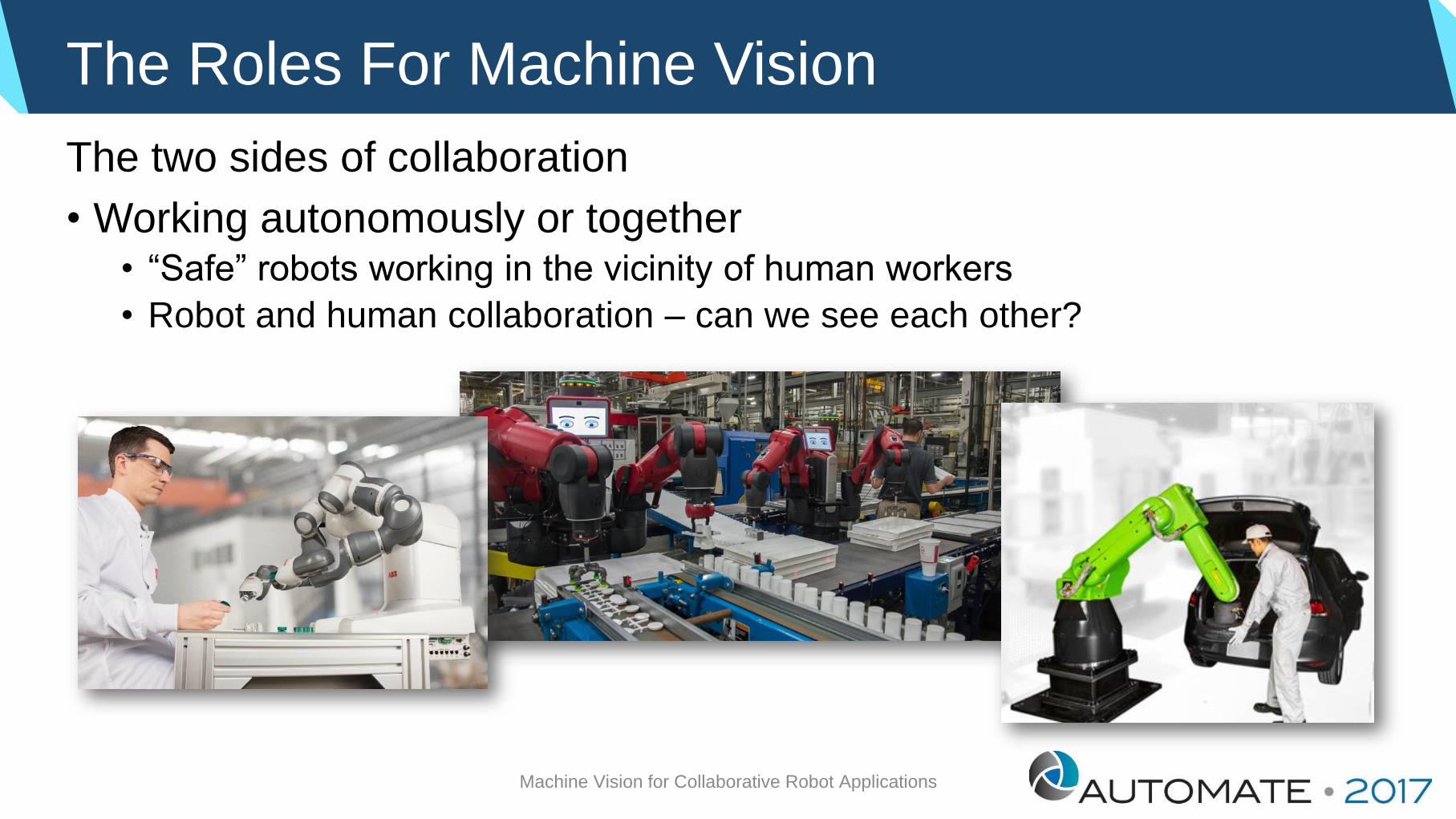
The two sides of collaboration
• Working autonomously or together• “Safe” robots working in the vicinity of human workers
• Robot and human collaboration – can we see each other?
Machine Vision for Collaborative Robot Applications
The Roles For Machine Vision
More-flexibile automation
• Human-like performance means human-like environments• True collaboration is elusive with respect to machine vision technology
• VGR for the collaborative robot – standard techniques and perhaps much more
Machine Vision for Collaborative Robot Applications
It’s Still Machine Vision
It’s still machine vision…
• Similar methods, new challenges• Ease of use at highest demand
• Complex application requirements impact machine vision implementations
• Support tools can ease robot programming
• Broader recognition capabilities are at a premium
• 3D is more in demand
Machine Vision for Collaborative Robot Applications
It’s Still Machine Vision
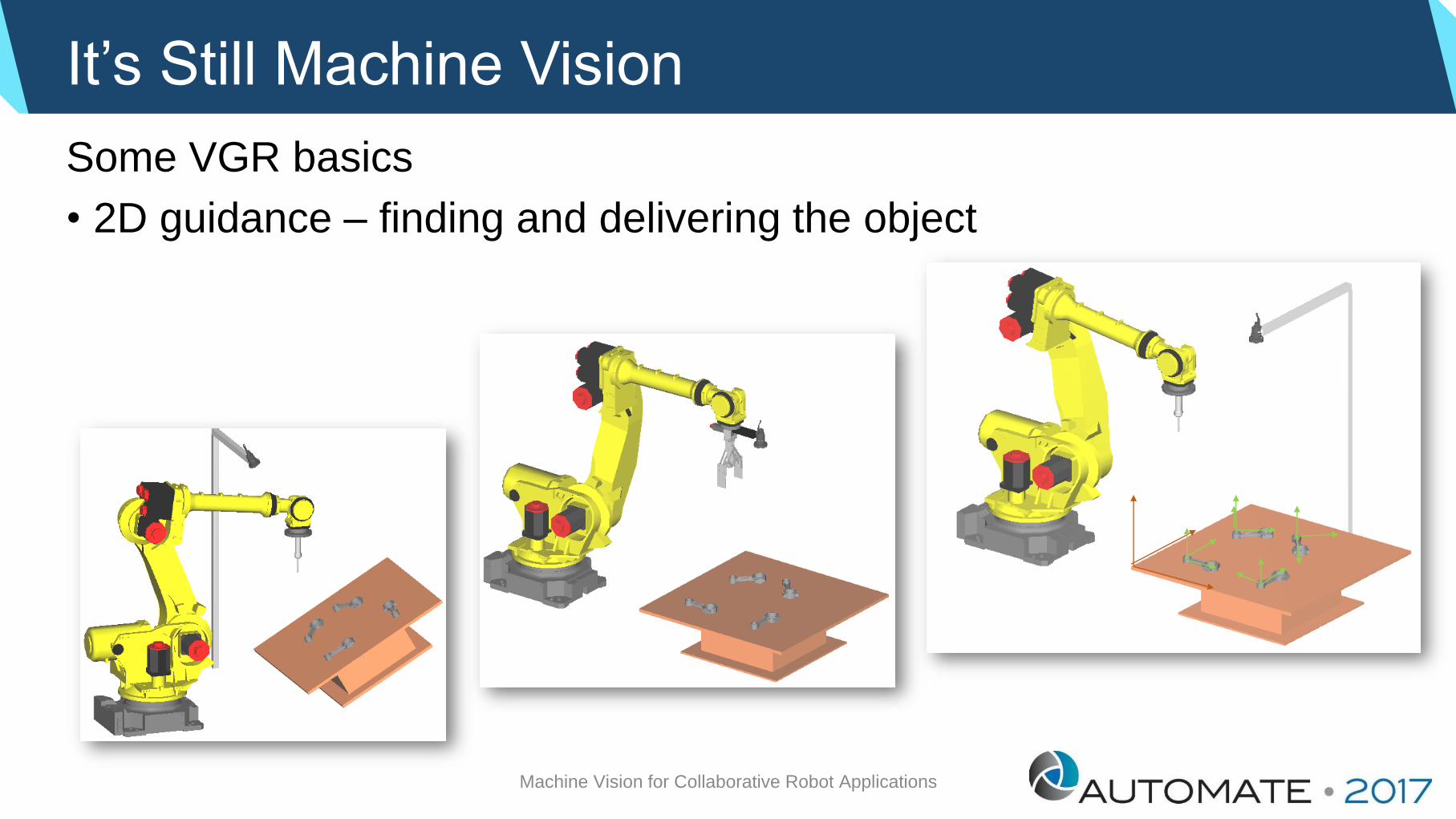
Some VGR basics
• 2D guidance – finding and delivering the object
Machine Vision for Collaborative Robot Applications
It’s Still Machine Vision
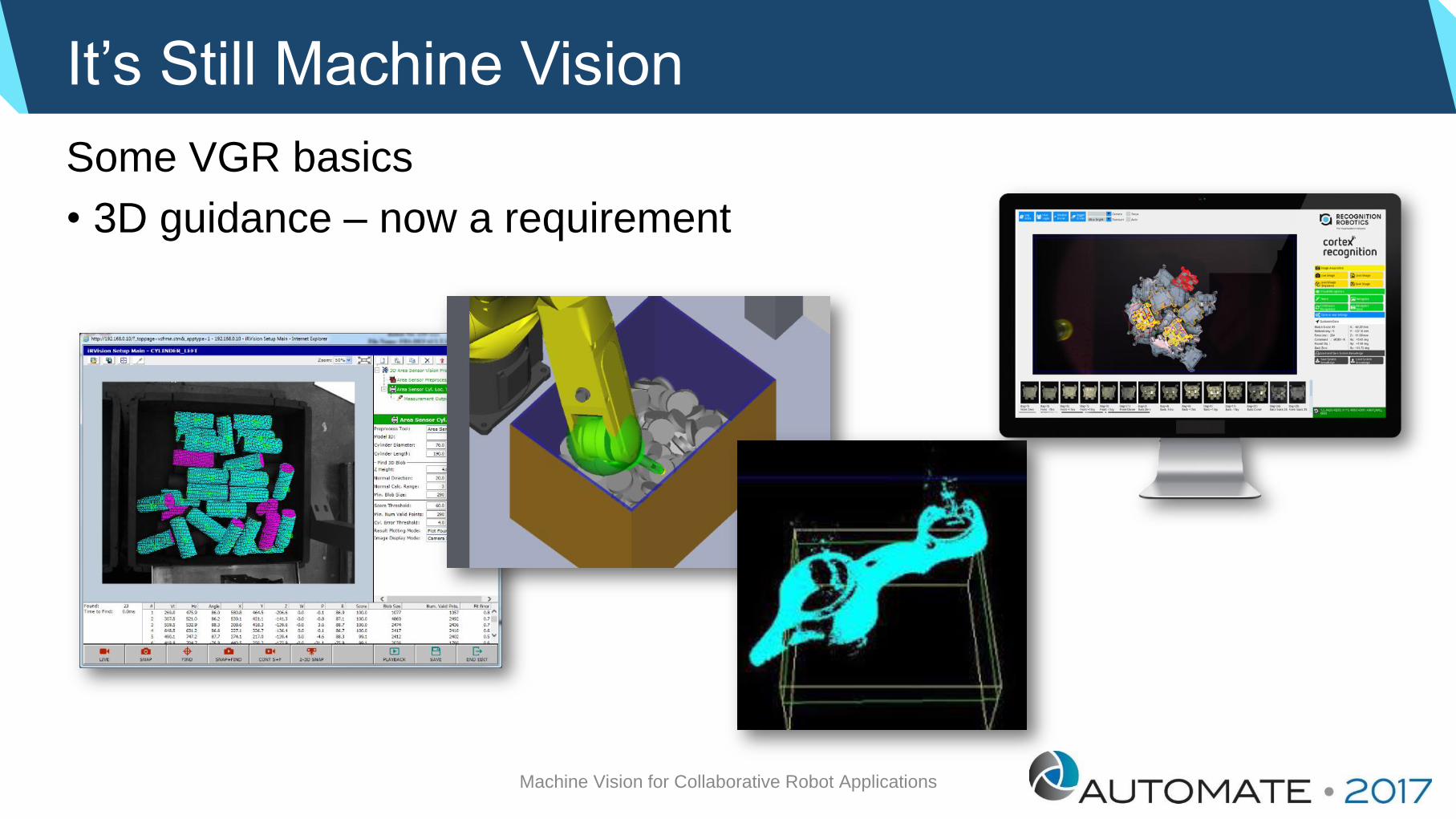
Some VGR basics
• 3D guidance – now a requirement
Machine Vision for Collaborative Robot Applications
It’s Still Machine Vision
Challenges – old and new
• Lighting in the collaborative environment
• The human interference factor
• Handling random parts
Machine Vision for Collaborative Robot Applications
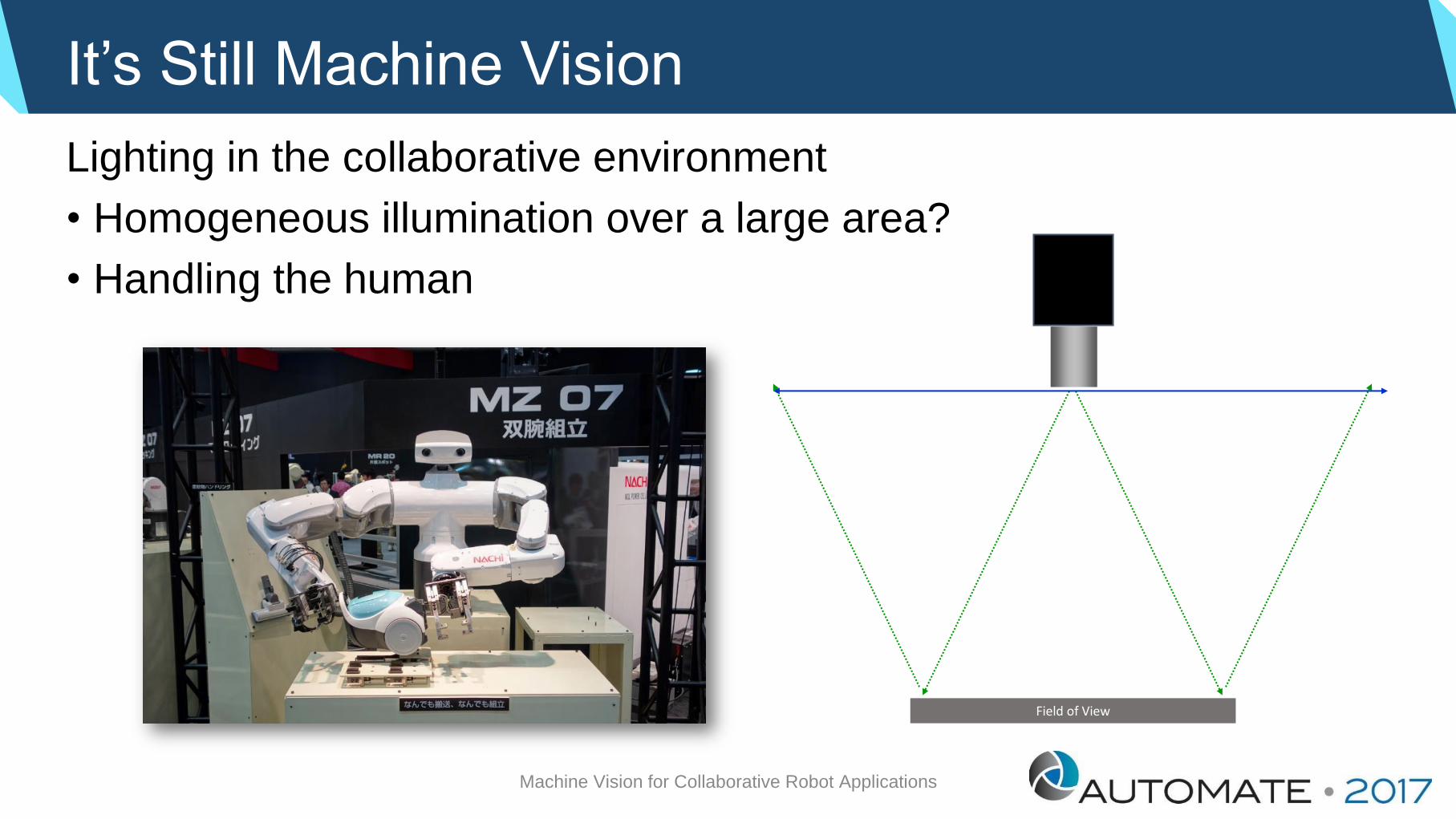
It’s Still Machine Vision
Lighting in the collaborative environment
• Homogeneous illumination over a large area?
• Handling the human
Machine Vision for Collaborative Robot Applications
Field of View
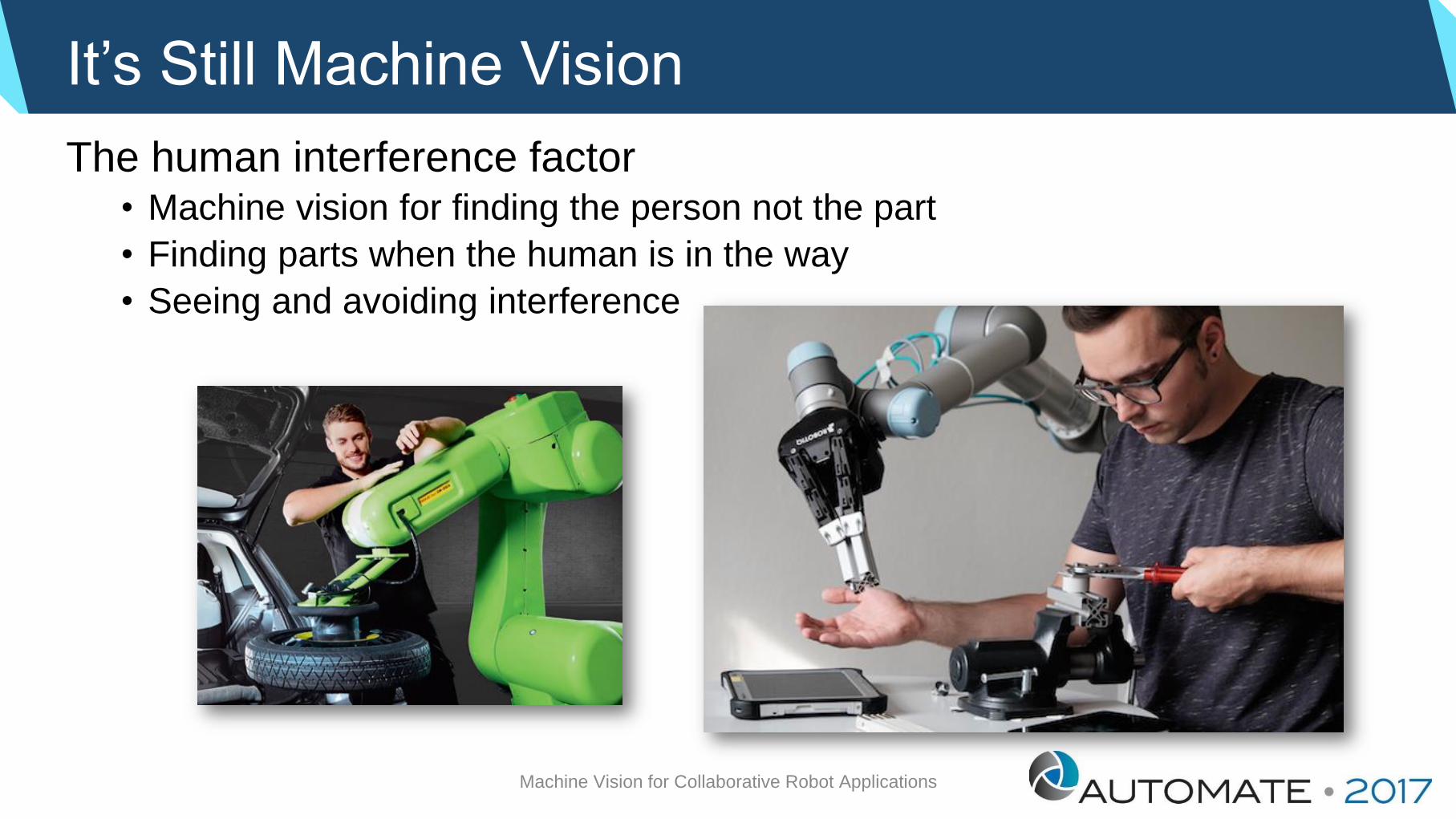
It’s Still Machine Vision
The human interference factor• Machine vision for finding the person not the part
• Finding parts when the human is in the way
• Seeing and avoiding interference
Machine Vision for Collaborative Robot Applications
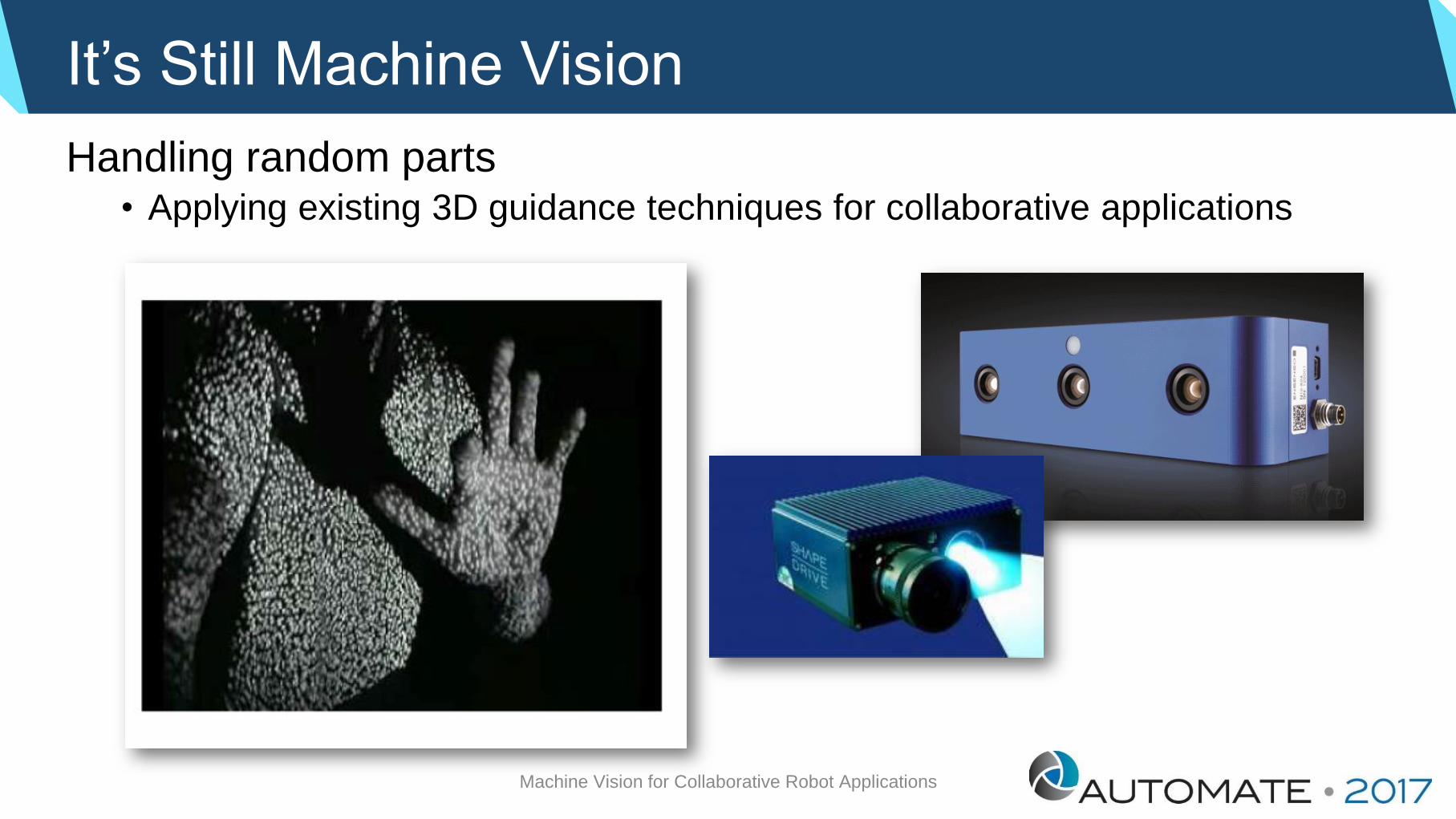
It’s Still Machine Vision
Handling random parts• Applying existing 3D guidance techniques for collaborative applications
Machine Vision for Collaborative Robot Applications
Applications And Future Trends
Application videos
Machine Vision for Collaborative Robot Applications
Applications And Future Trends
Application videos
Machine Vision for Collaborative Robot Applications
Applications And Future Trends
• What’s next• The market is justifiably constrained by safety demands
• More machine vision capability will drive future applications
• Technology is almost “ready for prime time”
Machine Vision for Collaborative Robot Applications
David L. DechowStaff Engineer-Intelligent Robotics/Machine Vision
FANUC America Corporation
3900 W. Hamlin Road
Rochester Hills, MI 48309
+1 (248) 276-4058
Contact Information


















