M ethodes Math ematiques pour la Physique...
140
Licence de Physique et Applications Universit´ e Paris-Sud M´ ethodes Math´ ematiques pour la Physique I A. Abada et W. Herreman – 2016 - 2017–
Transcript of M ethodes Math ematiques pour la Physique...
-
Licence de Physique et Applications Université Paris-Sud
Méthodes Mathématiques pour laPhysique I
!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"#$%&$'(#$!)&!*'+,&!!""#$%&"'($)*'+,')$%-.//0-./-%
!! !
%1$%234&5$"+%23'+%6+)$%'57)'5#%*&)%&"$%*$&8$%9$&'88$%)$4+3:($)*3;%$"%$%$"%$"+)$7)'*$;% '+#?%%
!&$'-&! "#$%! !&'(&)*'+,)'!(-&!*.+!/&)*0%'+,!12!3$4!5.$-&&-6'! #789:!;!!
-
2
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
Table des matières
I Algèbre 7
1 Algèbre linéaire 9
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Rudiments d’algèbre linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.1 Vecteurs et Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.2 Produit de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3 Définition d’un espace de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.2 Produit scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.3 Dimension de l’espace de Hilbert et base hilbertienne . . . . . . . . . . . . 16
1.4 Opérateurs et représentation matricelle d’opérateurs . . . . . . . . . . . . . . . . 19
1.4.1 Représentation matricielle d’un opérateur . . . . . . . . . . . . . . . . . . 19
1.4.2 Éléments de matrice d’un opérateur . . . . . . . . . . . . . . . . . . . . . 20
1.4.3 Adjoint et Transposé d’un opérateur . . . . . . . . . . . . . . . . . . . . . 21
1.4.4 Produit d’opérateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.4.5 Décomposition d’un opérateur en opérateur élémentaires . . . . . . . . . . 23
1.4.6 Déterminants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4.7 Trace d’un opérateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.5 Inversion de matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.6 Matrices utiles et leurs propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.6.1 Matrices scalaires, triangulaires, nilpotentes et unipotentes . . . . . . . . 27
1.6.2 Matrices unitaires et matrices orthogonales . . . . . . . . . . . . . . . . . 28
-
4 TABLE DES MATIÈRES
1.7 Résolution d’un système d’équations linéaires . . . . . . . . . . . . . . . . . . . . 30
1.7.1 Rang d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.8 Diagonalisation d’un opérateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.8.1 Valeurs propres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.8.2 Vecteurs propres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.8.3 Retour sur les invariants . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2 Bases non orthonormées, Métriques et Changement de Base 35
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2 Métrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3 Notation avec la convention de sommation d’Einstein . . . . . . . . . . . . . . . . 37
2.3.1 Changement de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3.2 Conséquences du changement de base sur la métrique g . . . . . . . . . . 39
II Équations Différentielles 41
1 Équations Différentielles Ordinaires 43
1.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.2 EDO’s linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
1.2.1 Définition & principe de superposition . . . . . . . . . . . . . . . . . . . 45
1.2.2 EDO’s linéaires à coefficients constants . . . . . . . . . . . . . . . . . . . 46
1.2.3 EDO’s linéaires à coefficients non-constants . . . . . . . . . . . . . . . . . 50
1.3 EDO’s non-linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
1.3.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
1.3.2 Quelques EDO’s non-linéaires dont on connait la solution . . . . . . . . . 57
2 Systèmes d’Equations Différentielles Ordinaires 63
2.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.2 Systèmes d’EDO’s linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.2.1 Definition & principe de superposition . . . . . . . . . . . . . . . . . . . . 65
2.2.2 Systèmes linéaires à coefficients constants . . . . . . . . . . . . . . . . . . 67
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
TABLE DES MATIÈRES 5
2.3 Systèmes d’EDO’s non-linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.3.1 Analyse locale autour d’un état équilibre . . . . . . . . . . . . . . . . . . 78
2.3.2 Exemple physique : le pendule . . . . . . . . . . . . . . . . . . . . . . . . 80
3 Équations Différentielles Partielles 85
3.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.2 Le problème de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.2.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.2.2 Théorème min-max . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.2.3 Solutions séparables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.3 Fonctions propres du Laplacien . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.3.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.3.2 Fonction propres séparables . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.3.3 Propriétés générales des modes propres de ∆ . . . . . . . . . . . . . . . . 105
3.4 Autres EDP’s fréquemment rencontrées en physique . . . . . . . . . . . . . . . . 107
3.4.1 Le problème de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.4.2 L’équation de diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
3.4.3 L’équation d’onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
3.4.4 L’équation de Schrödinger . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4 Annexes : Rappels sur les coordonnées cylindriques & sphériques 113
4.1 Coordonnées cylindriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.2 Coordonnées sphériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
III Transformation de Fourier 121
1 Transformation de Fourier au sens des fonctions 123
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
1.2 Intégrale de Lebesgue et mesure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
1.2.1 Mesure de Lebesgue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
1.2.2 Intégrale de Lebesgue et fonctions sommables . . . . . . . . . . . . . . . . 126
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
6 TABLE DES MATIÈRES
1.3 Transformation de Fourier dans L1(R) . . . . . . . . . . . . . . . . . . . . . . . . 127
1.3.1 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
1.4 Dérivation et transformée inverse . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
1.4.1 Dérivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
1.4.2 Transformée de Fourier Inverse . . . . . . . . . . . . . . . . . . . . . . . . 132
1.5 Transformée de Fourier d’une convolution de fonctions . . . . . . . . . . . . . . . 133
1.5.1 Propriété de la convolution . . . . . . . . . . . . . . . . . . . . . . . . . . 134
1.6 Transformation de Fourier dans L2(R) . . . . . . . . . . . . . . . . . . . . . . . . 136
1.7 Transformées de Fourier dans S(R) . . . . . . . . . . . . . . . . . . . . . . . . . . 138
1.8 Transformée de Fourier de fonctions à plusieurs variables . . . . . . . . . . . . . . 139
1.9 Application aux EDO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
Première partie
Algèbre
-
1
Algèbre linéaire
1.1 Introduction
Les lois de la physique se présentent souvent sous forme de relation linéaires : lois fondamen-tales du mouvement, systèmes électriques, etc. De manière générale, on appelle équation linéairedans les variables xi, i = 1, n, toute relation de la forme
n∑i=1
aixi = c , (1.1)
où ai, i = 1, n et b sont des coefficients réels.Ces équations linéaires décrivent des relations entre les variables xi sans donner directement lesvaleurs que ces dernières peuvent prendre (solutions) - on dit qu’elles sont implicites.
Définitions
a. Un ensemble fini d’équations linéaires dans les variables xi, i = 1, n s’appelle un systèmed’équations linéaires.
b. Tout n-uplet de nombres si, i = 1, n satisfaisant chacune des équations s’appelle solutiondu système d’équations linéaires.
c. Un système d’équations linéaires est dit incompatible ou inconsistent s’il n’admet pas desolutions.
Exemple : considérons le système{a11x1 + a12x2 = b1a21x2 + a22x2 = b2 ,
(1.2)
où a11 · a12 6= 0 et a22 · a21 6= 0. Ces deux équations représentent deux droites (D1) et(D2) du plan x1x2. Une solution de ce système est un point (s1, s2) appartenant aux deuxdroites. Si les droites se coupent en un seul point, le système est compatible, si elles sontparallèles, le système est incompatible, enfin si les droites sont confondues, le système aune infinité de solutions.
Avant de pouvoir écrire les systèmes d’équations linéaires sous forme matricielle, un rappelsur les matrices, plus généralement sur l’algèbre linéaire, est nécessaire.
-
10 1. ALGÈBRE LINÉAIRE
1.2 Rudiments d’algèbre linéaire
L’algèbre linéaire est la branche des mathématiques consacrée à l’étude des espaces vectoriels,des transformations linéaires et des systèmes d’équations linéaires.
Nous avons besoin de quelques définitions afin de fixer le langage.
I Un anneau A est un ensemble non vide muni d’une loi d’addition (+)- groupe commutatif -et d’une loi de multiplication (notée (×) ou ·) - associative -, possédant un élément neutre (1),et distributive par rapport à l’addition.
I Un corps K est un anneau dans lequel tout élément non nul est inversible. Citons par exemplele corps R des nombres réels, le corps C des nombres complexes, le corps IQ des nombres ration-nels, etc,. Un corps est dit commutatif si la multiplication est une opération commutative.
I Un espace vectoriel V sur un corps K est un groupe commutatif pour une loi +, muni d’uneaction de K, c’est à dire une application linéaire de K ×V dans V : (λ, x)→ λ · x vérifiant pourtout x, y ∈ V et pour tout λ, µ ∈ K les propriétés suivantes :
λ · (x+ y) = (λ · x) + (λ · y), (λ+ µ) · y = (λ · y) + (µ · y), λ · (µ · x) = (λ µ) · x . (1.3)
Un espace vectoriel est donc un ensemble muni d’une structure permettant d’effectuer des com-binaisons linéaires. Il est défini sur un corps. Les éléments de l’espace vectoriel (du corps) sontappelés vecteurs (scalaires).
Dans un premier temps, on considère des espaces vectoriels définis sur le corps des réelsqu’on généralisera ensuite aux espaces vectoriels définis sur le corps des complexes (espaces deHilbert).
1.2.1 Vecteurs et Bases
Considérons un espace vectoriel V sur Rn (de dimension n). Tout vecteur ~V de V se décomposesur des vecteurs de base ~ui, i = 1, n, comme suit
~V =
n∑i=1
ci~ui, avec ci ∈ R. (1.4)
On appelle ci les composantes du vecteur ~V .
On note en général la base canonique de V sur laquelle tout vecteur de V se décompose
{~u1, ~u2, ..., ~un} (1.5)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.2. RUDIMENTS D’ALGÈBRE LINÉAIRE 11
avec
~u1 =
100...0
; ~u2 =
010...0
; · · · ; ~un =
00...01
, (1.6)
S’il s’agit d’une base orthonormée de V, les vecteurs ~ui vérifient
~ui · ~uj ={
0 si i 6= j1 si i = j
= δij . (1.7)
Dans Eq. (1.7), le symbole δij qui permet une écriture compacte des expressions (δij = 1 si i = j,δij = 0 si i 6= j) est appelé symbole de Kronecker.
1.2.2 Produit de vecteurs
Soient ~a, ~b et ~c trois vecteurs quelconques de V et soit λ un nombre réel, alors(toutes les relations suivantes peuvent être facilement démontrées) :i) ~a+~b = ~b+ ~a ;ii) ~a+ (~b+ ~c) = (~a+~b) + ~c ;iii) λ(~a+~b) = λ~a+ λ~b
I Produit scalaire
Soit V un espace vetoriel de dimension n et soient ~a = (a1, a2, ..., an)t et ~b = (b1, b2, ..., bn)tdeux vecteurs quelconques de V. On définit leur produit scalaire par le scalaire réel (onrappelle qu’on travaille pour le moment avec des espaces vectoriels définis sur le corps desréels) :
~a ·~b =n∑i=1
aibi. (1.8)
Le produit scalaire ainsi défini vérifie les prorpiétés suivantes :si ~a, ~b et ~c sont trois vecteurs quelconques de V et le scalaire quelconque λ ∈ R :
i) ~a ·~b = ~b · ~a (commutatif) ;ii) ~a · (~b+ ~c) = ~a · ~c+~b · ~c ;iii) λ(~a) ·~b = λ(~a ·~b) ;iv) ~a · ~a ≥ 0 ;v) ~a · ~a = 0 si et seulement si ~a = ~0.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
12 1. ALGÈBRE LINÉAIRE
I Norme et distance euclidienne
On définit la norme ou la norme euclidienne d’un vecteur ~a ∈ V par
||~a|| =√~a · ~a ≡
√〈a|a〉 =
√√√√ n∑i=1
(ai)2. (1.9)
La distance ou distance euclidienne entre deux vecteurs ~a et ~b de V est définie par
d(~a,~b) = ||~a−~b|| =
√√√√ n∑i=1
(ai − bi)2 . (1.10)
On peut démontrer grâce aux différentes définitions et propriétés déjà abordées que ∀ ~a, ~b ∈ Vet ∀ λ ∈ R, alors
— ||~a|| ≥ 0 ;— ||λ~a|| = |λ| ||~a|| ;— ||~a+~b|| ≤ ||~a||+ ||~b|| (inégalité du triangle) ;— |~a ·~b| ≤ ||~a||||~b|| (inégalité de Cauchy-Schwarz).
I Produit vectoriel de vecteurs
C’est ici l’occasion de rappeler comment calculer le produit vectoriel de deux vecteurs d’unespace vectoriel à trois dimensions. En physique, de nombreux vecteurs sont construits à par-tir du produit vectoriels de deux vecteurs physiques. Par exemple le vecteur de Poynting enélectromagnétisme, défini par produit vectoriel du champ électrique par le champ magnétiquedivisé par la permitivité magnétique du vide, ~E ∧ ~B/µ0, ou le vecteur moment cinétique or-bital en mécanique défini par le produit vectoriel du vecteur position par le vecteur quantitéde mouvement ou impulsion, ~r ∧ ~p , etc. Soient ~a = (a1, a2, ..., an)t et ~b = (b1, b2, ..., bn)t deuxvecteurs quelconques de V. On définit le produit vectoriel de ces deux vecteurs par le vecteur~c = ~a ∧~b (de composantes réelles, V étant un espace vectoriel défini sur R3). Il s’écrit dans labase la base orthonormée {~ui}, i = 1, 3 comme suit :
~a ∧ ~b = ~c =
a1a2a3
∧b1b2b3
=a2b3 − a3b2a3b1 − a1b3a1b2 − a2b1
. (1.11)On peut vérifier que le produit vectoriel d’un vecteur par lui-même est nul et que produitvectoriel est anticommutatif :
~a ∧~b = −~b ∧ ~a. (1.12)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.2. RUDIMENTS D’ALGÈBRE LINÉAIRE 13
Relations utiles : soient quatre vecteurs quelconques ~a, ~b, ~c, ~d. Les relations ci-dessous seronttrès utiles et sont facile à démontrer :
~a ∧(~b ∧ ~c
)+~b ∧ (~c ∧ ~a) + ~c ∧
(~a ∧~b
)= ~0 ; (1.13)
~a ∧(~b ∧ ~c
)= (~a · ~c)~b−
(~a ·~b
)~c ; (1.14)(
~a ∧~b)·(~c ∧ ~d
)= (~a · ~c)
(~b · ~d
)−(~a · ~d
)(~b · ~c
); (1.15)(
~a ∧~b)∧(~c ∧ ~d
)=[(~a ∧~b
)· ~d]~c−
[(~a ∧~b
)· ~c]~d (1.16)
=[(~c ∧ ~d
)· ~a]~b−
[(~c ∧ ~d
)·~b]~a . (1.17)
Ces relations sont encore plus faciles à démontrer avec l’outil suivant.
I Le tenseur antisymétrique de Lévi-Civita
Soit {~e1, ~e2, ~e3} une base orthonormée directe d’un espace vectoriel à trois dimensions. Onpeut définir un tenseur antisymétrique, dit de Lévi-Civita, comme
�ijk = (~ei ∧ ~ej) · ~ek . (1.18)
Grâce à la définition du produit vectoriel, on peut immédiatement vérifier quea) �123 = 1,b) �ijk est complètetment antisymétrique : �ijk = −�jik = +�jki.Cet outil permet souvent de compacter des expressions lourdes. Par exemple, on peut montrer
que le produit vectoriel de deux vecteurs ~A et ~B appartenant à un espace vectoriel définit surR3 peut s’écrire à l’aide du tenseur �ijk comme
~A ∧ ~B =∑k
∑i,j
�ijkAiBj
~ek , (1.19)où {~ek}, k = 1, 3 est une base directe.
I Convention de sommation d’Einstein
En utilisant la convention de sommation d’Einstein :“dans une expression, tout indice répété est sommé”, on peut écrire - entre autres - leproduit vectoriel précédent comme
~A ∧ ~B =∑k
(�ijkAiBj)~ek = �ijkAiBj~ek =⇒(~A ∧ ~B
)k
= �ijkAiBj . (1.20)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
14 1. ALGÈBRE LINÉAIRE
Exercice 1— En utilisant le tenseur de Lévi-Civita, calculer les composantes cartésiennes du moment
cinétique orbital ~L = ~r∧~p, où ~r et ~p sont les vecteurs position et impulsion d’une particuleponctuelle.
— Refaire le même exercice et retrouver les coordonnées cylindriques et sphériques de cemême vecteur ~L.
Exercice 2Utilisez le tenseur de Lévi-Civita pour démontrer les relations Eqs. (1.13) à (1.17).
I Le produit scalaire qu’on a rappelé dans cette section concernait des espaces vectoriels définissur Rn. En mécanique quantique, les vecteurs qu’on utilise (vecteurs caractérisant l’état quan-tique d’un système) ont des composantes complexes (à cause de l’interprétation probabiliste).Ces vecteurs appartiennent à des espaces vectoriels définis sur le corps des complexes qu’onappelle “espaces de Hilbert”. On note - notation de Dirac - ces vecteurs ~ψ : “|ψ〉” et onles appelle “ket” en mécanique quantique. C’est ce que nous allons aborder dans la section quisuit.
1.3 Définition d’un espace de Hilbert
Définition 1 : Un espace de Hilbert est un espace vectoriel défini sur le corps descomplexes, complet, muni d’un produit scalaire complexe hermitien (et dont la normedéfinie positive découle de ce produit scalaire).
En plus d’être complet 1, on suppose l’espace de Hilbert également séparable - il existe une suitepartout dense 2 dans V.
1.3.1 Notations
— Dans toute la suite, on notera x∗ le complexe conjugué de x, quelque soit le nombrecomplexe x.
— Un vecteur ~V de V (défini sur C) sera noté |V 〉 pour bien se rappeler que ses composantessur une base peuvent être complexes.
— Dans une base canonique, le transposé d’un vecteur colonne |V 〉 est un vecteur ligne,dont les composantes sont les complexes conjuguées de celles du vecteur colonne. On lenotera 〈V | (qu’on appelle “bra” en mécanique quantique).
1. Complet : un espace vectoriel V est complet si toute suite de Cauchy de V est convergente dans V.2. En topologie, un espace séparable est un espace topologique contenant un sous-ensemble dénombrable et
dense, c’est-à-dire contenant un ensemble dénombrable de points dont l’adhérence est égale à l’espace topologiquetout entier.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.3. DÉFINITION D’UN ESPACE DE HILBERT 15
1.3.2 Produit scalaire
Définition 2 : On appelle produit scalaire hermitien sur un espace vectoriel V, touteforme sésquilinéaire
(x, y)application−−−−−→ 〈x, y〉 (1.21)
I Ce produit scalaire vérifie par définition les propriétés suivantes :
i) Propriété d’hermiticité : 〈g, f〉 = 〈f, g〉∗ ;
ii) Antilinéarité à gauche : ∀α, β ∈ C et f, g, h ∈ V , 〈αg + βf, h〉 = α∗〈g, h〉+ β∗〈f, h〉 ;Linéarité à droite : ∀α, β ∈ C et f, g, h ∈ V , 〈h, αg + βf〉 = α〈h, g〉+ β〈h, f〉 ;
iii) Norme positive : 〈f, f〉 ≥ 0 , ∀f ∈ V ;
iv) 〈f, f〉 = 0 si et seulement si f = 0.
Notation : soient |ψ1〉 et |ψ2〉 ∈ V, on notera leur produit scalaire comme suit :
(ψ1, ψ2) −→ 〈ψ1, ψ2〉,avec 〈ψ1, ψ2〉 = 〈ψ2, ψ1〉∗. (1.22)
La propriété d’hermiticité ainsi que la positivité du produit scalaire (1.22) impliquent quela norme d’un vecteur est réelle et positive
〈ψ,ψ〉 =‖ |ψ〉 ‖2 = 〈ψ|ψ〉∗ ≥ 0. (1.23)
I Définition de l’espace dual de V
En général, l’espace dual d’un espace vectoriel V est l’ensemble des formes linéaires sur V.
. On appelle donc V∗, le dual de V, l’espace vectoriel des formes linéaires (〈ω, ·〉) ∈ V∗ telles quel’action de 〈ω, ·〉 ∈ V∗ sur un vecteur |v〉 ∈ V donne le nombre scalaire complexe 〈ω, v〉.
. On montre qu’il y a une correspondance bi-univoque et sesquilinéaire entre l’espace deHilbert V et son dual V∗, qui est l’ensemble des formes linéaires continues définies sur V (iso-morphisme 3).
Définition 3 : A tout vecteur |ψ〉 ∈ V, on associe un élément de V∗, le dual de l’espacede Hilbert, noté 〈ψ|, appelé vecteur ligne ou “bra”
ket −→ bra|ψ〉 ∈ V −→ 〈ψ| ∈ V∗ (1.24)
3. Isomorphisme : application bijective qui préserve la structure ; V est le dual de V∗.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
16 1. ALGÈBRE LINÉAIRE
Le produit scalaire dans l’espace des états (de Hilbert) de deux vecteurs |ψ1〉 et |ψ2〉 estformé par la forme “bra, ket” - c’est à dire “vecteur ligne · vecteur colonne” :
〈ψ2, ψ1〉 ≡ 〈ψ2|ψ1〉 . (1.25)
Résumé :
La notation de Dirac s’inspire de la relation bi-univoque entre l’espace de Hilbert et son dual.
I À tout vecteur |ψ〉 ∈ V (vecteur colonne) −→ 〈ψ| ∈ V∗ (vecteur ligne dont les compo-santes sont les conjuguées complexes de celles du vecteur colonne) ;
I L’action du vecteur ligne 〈ψ| ∈ V∗ sur le vecteur colonne |φ〉 ∈ V est le produit scalairede |φ〉 par |ψ〉, tel que (et pour assurer la positivité de la norme) :
〈ψ|φ〉 = 〈φ|ψ〉∗ .
1.3.3 Dimension de l’espace de Hilbert et base hilbertienne
. La dimension d’un espace de Hilbert peut être finie comme dans le cas du traitement du spin :l’espace des états de spin est discret. Dans ce cas on utilise des bases finies (dénombrables).
. La dimension peut être infinie comme c’est le cas de l’espace ∈ L2(R3) des fonctions d’ondede carré sommables (qu’on utilise en mécanique quantique ondulatoire) et auquel cas on utiliserades bases continues.
I Projecteurs
Prenons le cas d’un espace vectoriel complet de dimension finie n. Soit {|ui〉, i = 1, n} unebase orthonormée de V. Le projecteur sur le vecteur |ui〉 est défini par
P̂i = |ui〉 〈ui|. (1.26)
On peut vérifier que P̂ 2i = P̂i (et que, voir plus loin, P̂†i = P̂i). La somme de tous les projecteurs
sur les vecteurs |ui〉 donnera l’identité 11 (l’espace vectoriel en question étant “complet”). Labase {|ui〉, i = 1, n} vérifie donc la relation de fermeture et la condition d’orthonormalisation :
n∑i=1
|ui〉 〈ui| = 11 (fermeture) , (1.27)
〈ui|uj〉 = δij , ∀ i, j ∈ [1, n] (orthonormalisation) . (1.28)
Les vecteurs |u1〉, · · · , |un〉 sont vus comme des vecteurs colonnes (en métrique euclidienne), cf.Eq. (1.6)
|u1〉 =
100...0
; |u2〉 =
010...0
; · · · ; |un〉 =
00...01
, (1.29)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.3. DÉFINITION D’UN ESPACE DE HILBERT 17
et les bra sont vus comme des vecteurs ligne
〈u1| = (1, 0, 0, · · · , 0) ; · · · ; 〈un| = (0, · · · , 0, 1); (1.30)avec |ui〉 = (〈ui|)†, (1.31)
de sorte que si |ψ〉 et |φ〉 sont deux vecteurs ∈ V, on peut les écrire sur la base choisie {|ui〉} :
|ψ〉 =∑i
ψi|ui〉,
|φ〉 =∑i
φi|ui〉,
et leur produit scalaire est donné par
〈ψ|φ〉 =N∑
i,j=1
(ψ∗i 〈ui|) (φj |uj〉) =N∑
i,j=1
ψ∗i φj〈ui|uj〉
=N∑i=1
ψ∗i φi. (1.32)
Exercice
— Utiliser les propriétés du produit scalaire hermitien pour démontrer l’équation précédente(ne pas oublier le caractère antilinéaire à gauche et linéaire à droite !).
— Calculer le produit scalaire de |ψ〉+ i|φ〉 par i|ψ〉 − |φ〉.
Cas de bases de dimension infinie
En général, pour les cas étudiés en physique, on travaille toujours avec des bases dénombrables,c’est à dire que l’on peut indexer par un nombre entier. De nombreux exemples se trouvent dansles résolutions d’équations différentielles (ou systèmes d’équations différentielles linéaires) 4. Parexemple, la fonction d’onde de l’oscillateur harmonique (à une dimension) en mécanique quan-tique se développe sur la base des fonctions polynômes de Hermite Hn(x), n ∈ N. Un autreexemple concerne la description quantique de l’atome d’hydrogène, où du fait de la symétrie cen-trale, la partie spatiale de la fonction d’onde ψ(~r, t) = ψ(r, θ, φ, t) se sépare en un produit d’unefonction radiale f(r) par une fonction angulaire, φ(θ, φ) ; chacune de ces fonctions se développentsur des bases dénombrables et continues, celle des polynômes de Laguerre Ln(r), n ∈ N pour lafonction radiale, et celles des harmoniques sphériques Y`,m(θ, φ), ` ∈ N, −` ≤ m ≤ +` pour lapartie angulaire (direction). Ainsi, dans ce cas, la fonction d’onde s’écrit
ψ(~r, t) = ψ(r, θ, φ, t) =∞∑n=1
n−1∑`=0
m=+`∑m=−`
cn`m(t)Ln(r)Y`,m(θ, φ).
4. Les équations différentielles seront seront traitées dans la deuxième partie du cours
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
18 1. ALGÈBRE LINÉAIRE
I Pour constituer une base complète, les éléments de la base {fn(x)} sont normés, orthogonauxentre eux et la somme des projecteurs sur chacun des éléments doit donner l’opérateur identité.Les relations d’orthonormalisation et de fermeture se généralisent dans le cas continu commesuit : la fonction fn(x) est la représentation d’un vecteur |n〉 en fonction de la variable x, laquellecorrespond à un vecteur |x〉 : fn(x) = 〈x|n〉, où {|x〉} est une base infinie et continue de l’espace,vérifiant (on suppose que x ∈ R) :
orthonormalisation : 〈x|y〉 = δ(x− y) (distribution de Dirac) , (1.33)
fermeture :
∫R
|x〉〈x| dx = 11 . (1.34)
Grâce à ces relations, il s’ensuit que les fonctions fn(x) d’une base continue {fn(x)} vérifient lesconditions d’orthonormalisation et de fermeture suivantes :
orthonormalisation : 〈n|m〉 =∫R
dx f∗n(x) fm(x) = δnm, ∀ n,m ∈ N , (1.35)
fermeture :
∞∑n=0
|n〉〈n| = 11 =∞∑n=0
∫R
dx
∫R
dy fn(x)f∗n(y)|x〉〈y| = 11 . (1.36)
RemarqueIl est à noter que les vecteurs |x〉 ne constituent pas en général une base hilbertienne. Ils serventde moyen d’expression (ou de représentation) des vecteurs d’état de l’epace de Hilbert. Ainsifn(x) = 〈x|n〉 représente la projection de l’état |n〉 qui lui appartient à une base hilbertienne(de dimension finie ou pas) sur un état de position |x〉 (en mécanique quantique, on dit que lesfonctions d’onde sont une représentation ”position” des vecteurs d’états). En réalité, il existebeaucoup d’autres descriptions équivalentes de ce vecteur |n〉 correspondant à des choix debases différents ; les descriptions correspondent à des composantes du vecteur sur ces baseset dans l’exemple précédant, nous avons choisi la base des positions. En choisissant commereprésentation la base des “impulsions”, {|p〉}, la base continue {f̃n(p)} sera obtenue à partirde la base {fn(x)} par changement de base {|p〉} → {|x〉}, qui dans ce cas n’est rien d’autrequ’effectuer une transformation de Fourier inverse 5.
Ainsi, par exemple, les harmoniques sphériques sont la représentation d’un vecteur noté |`m〉dans l’espace des directions (angles θ et φ en coordonnées sphériques) et sont ainsi définies parY`,m(θ, ϕ) = 〈θ, ϕ|`m〉, ` ∈ N, −` ≤ m ≤ +` vérifient :
. la relation d’orthonormalisation :2π∫0
dϕ
π∫0
sin θ dθ Y ∗`,m(θ, ϕ) Y`′,m′(θ, ϕ) = δ``′ δmm′ . (1.37)
. et la relation de fermeture :∞∑`=0
m=+`∑m=−`
∫4π
dΩ
∫4π
dΩ′ Y`,m(θ, ϕ) Y∗`,m(θ
′, ϕ′) |θ, ϕ〉〈θ′, ϕ′| = 11, où dΩ(′) = sin θ(′)dθ(′)dϕ(′).
(1.38)
5. La dernière partie de ce cours sera consacrée aux transformées de Fourier au sens des fonctions.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.4. OPÉRATEURS ET REPRÉSENTATION MATRICELLE D’OPÉRATEURS 19
I Dans le cas de dimension infinie, c’est par exemple le cas des fonctions d’onde ∈ L2(R3) (decarré sommable) décrivant l’état quantique d’un système à un instant donné au point ~r, toutélément de l’espace de Hilbert se décompose comme suit
f(~r, t) =
∞∑n=0
cn(t)fn(~r) , (1.39)
les fonctions fn(~r) formant une base orthonormée, elles vérifient donc les relations (1.35) et(1.36). Les coefficients cn(t) sont donnés par
cn(t) =
∫d3rf∗n(~r)f(~r, t) . (1.40)
Enfin, pour que la fonction f(~r, t) soit normée à l’unité, il faut et il suffit que les coefficientscn(t) (complexes en général) satisfassent
∞∑n=0
|cn(t)|2 = 1 . (1.41)
1.4 Opérateurs et représentation matricelle d’opérateurs
Soient deux espaces vectoriels V1 et V2 définis sur un corps K (l’ensemble des nombres réelsRn ou sur le corps des complexes) et considérons une application linéaire de V1 vers V2, notée u- appelée aussi morphisme u : V1 → V2.- Si l’application u est bijective, on parle d’isomorphisme d’espaces vectoriels.- Si V1 = V2, on parle d’endomorphisme ou opérateur et d’automorphisme si l’application uest bijective.
I Ainsi, dans le cadre de l’algèbre linéaire, un opérateur est une application linéairede l’espace vectoriel dans lui même.
I Afin de pouvoir étudier le rôle des opérateurs sur les vecteurs d’un espace vectoriel, on lesreprésente par des matrices que l’on exprime sur une base orthonormée donnée de l’espacevectoriel. Le projecteur (cf. Eq. (1.26)) sur un vecteur de base de V est un exemple d’opérateur.
1.4.1 Représentation matricielle d’un opérateur
Soit un opérateur A : application linéaire de V dans lui-même, c’est-à-dire que son actionsur un vecteur |φ〉 de V donnera un (autre) vecteur (image) de V,
|ψ〉 = A|φ〉 ∈ V. (1.42)
Dans le cas où V est de dimension finie N , on exprime A sur une base orthogonale {|ei〉}, i = 1, Nde V par une matrice carrée A (N ×N). Les entrées de la matrice (les éléments de matrice del’opérateur) sont définies comme suit :
A|ei〉 =∑j
Aji|ej〉. (1.43)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
20 1. ALGÈBRE LINÉAIRE
Prenons le cas où la dimension N = 3 et représentons un vecteur |φ〉 ∈ V et un opérateur Adans une base canonique (orthonormée ) {|e1〉, |e2〉, |e3〉} :
~e1 =
100
; ~e2 =01
0
; ~e3 =00
1
, (1.44)|φ〉 = φ1|e1〉+ φ2|e2〉+ φ3|e3〉 → ~φ =
φ1φ2φ3
, (1.45)A|φ〉 =
∑i
(∑k
Aikφk
)|ei〉 =
∑k A1kφk∑k A2kφk∑k A3kφk
=A11 A12 A13A21 A22 A23A31 A32 A33
·φ1φ2φ3
. (1.46)I On remarque que les colonnes de la matrice 3× 3 de Eq. (1.46) ne sont rien d’autres que lesimages des vecteurs de base |ei〉, i = 1, 3 sous l’application (l’opérateur) A :
A|ei〉 =∑j
(∑k
Ajkδki
)|ej〉 =
∑j
Aji|ej〉 , (1.47)
où les composantes des vecteurs |ei〉 sont 0 ou 1, représentées par δki, i.e. |ei〉 =∑
k δki|ek〉.Ainsi, par exemple, l’image de |e1〉 sous A est :
A|e1〉 = A11|e1〉+A21|e2〉+A31|e3〉 =
A11 A12 A13A21 A22 A23A31 A32 A33
·10
0
=A11A21A31
. (1.48)I On peut remarquer que δki sont les composantes de l’opérateur identité 11 (à valeurs 1 sur ladiagonale et 0 partout ailleurs).
1.4.2 Éléments de matrice d’un opérateur
On vient de voir qu’un opérateur s’écrit dans une base orthonormée {|ei〉}, i = 1, N de V (dedimension finie) comme une matrice N ×N .- Dans cette base, un vecteur |φ〉 est juste un vecteur colonne, donc une matrice colonne N×1.- La transposée d’un vecteur colonne |φ〉 est un vecteur ligne, 〈φ| appartenant au dual de V,V∗. Il est représenté par une matrice ligne 1×N . Si l’espace vectoriel est un espace de Hilbert,alors les composantes de 〈φ| sont les conjugées complexes de celles de |φ〉.
Dans une base orthogonale {|ei〉}, i = 1, N , les composantes de l’opérateur A (éléments dematrice) sont données par les nombres (scalaires)
Ajk = 〈ej |A|ek〉. (1.49)
On peut, par exemple, vérifier que l’élément de matrice A21 s’obtient comme suit :
A21 = 〈e2|A|e1〉 =(0 1 0
)·
A11 A12 A13A21 A22 A23A31 A32 A33
·10
0
. (1.50)- Licence de Physique et Applications - Année 2016-2017
A. Abada et W. Herreman
-
1.4. OPÉRATEURS ET REPRÉSENTATION MATRICELLE D’OPÉRATEURS 21
I De manière plus générale, soient deux vecteurs |ψ〉 et |φ〉 d’un espace vectoriel V défini surle corps des complexes ; on parle d’élément de matrice d’un opérateur A lorsqu’on projette levecteur A|ψ〉 sur le bra de |φ〉 (produit scalaire hermitien) :
〈φ| · (A|ψ〉) = (〈φ| · A) |ψ〉 ≡ 〈φ|A|ψ〉 . (1.51)
I Dans l’équation ci-dessus, on multiplie le vecteur ligne (bra) (1×N) par une matrice N×N parun vecteur (ket) N × 1, de sorte que 〈φ|(A|ψ〉) soit un scalaire (1, N)× (N,N)× (N, 1) = (1, 1).
1.4.3 Adjoint et Transposé d’un opérateur
I Transposée d’un opérateur
Soient Aij les éléments de la matrice représentant un opérateur A. On définit la matricetransposée de A par la matrice notée tA (ou At), dont les lignes sont les colonnes de la matriceA.tA est la représentation matricielle de l’opérateur transposé de A, noté At.
B = At ⇐⇒ Bij = Aji , ∀ i, j . (1.52)
Exemple :
A =
1 2 1+i4 i -1-1-i 2 2
, At = 1 4 -1-i2 i 2
1+i -1 2
. (1.53)On remarque que les éléments diagonaux d’une matrice et de sa transposée sont les mêmes.
I Adjoint d’un opérateur
Soient Aij les éléments de la matrice représentant un opérateur A. On définit son opérateuradjoint, noté A† par l’opérateur représenté par la matrice conjugée complexe de la matricetransposée de A :
B = A† =(At)∗
= (A∗)t ⇐⇒ Bij = (Aji)∗ , ∀ i, j . (1.54)
Exemple :
A =
1 2 1+i4 i -1-1-i 2 2
, A† = 1 4 -1+i2 -i 2
1-i -1 2
. (1.55)On remarque que les éléments diagonaux d’une matrice sont les conjugés complexes des élémentsdiagonaux de la matrice adjointe.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
22 1. ALGÈBRE LINÉAIRE
I Si un opérateur vérifie A = A†, on dit qu’il est auto-adjoint ou hermitien.
I En reprenant Eq. (1.51), on peut définir l’adjoint d’un opérateur A comme suit :soit A un opérateur agissant dans V. L’opérateur adjoint de A, A†, et défini par : ∀ |ψ〉 et|φ〉 ∈ V, l’élément de matrice 〈φ|A|ψ〉 vérifie :
〈ψ|A†|φ〉 = 〈φ|A|ψ〉∗ (1.56)
Remarque : en mécanique quantique, les opérateur auto-adjoints ou hermitiens sont appelés “Observables ” dans le sens où leurs éléments de matrice diagonaux sont réels.
I Définition : un opérateur est auto-adjoint ou hermitien si sa valeur moyenne sur unvecteur (ket) |ψ〉 est réelle (on dit que cet opérateur est observable). En effet, en prenant |ψ〉 = |φ〉dans Eq. (1.51), on voit tout de suite que
〈ψ|A†|ψ〉 = 〈ψ|A|ψ〉∗. (1.57)
Réciproquement, si la valeur moyenne 〈ψ|A|ψ〉 est réelle, alors
〈ψ|A|ψ〉∗ = 〈ψ|A|ψ〉 ⇒ A = A†. (1.58)
1.4.4 Produit d’opérateurs
Nous aurons souvent à calculer des produits d’opérateurs représentés dans une base ortho-normée donnée par des matrices que nous aurons donc à multiplier entre elles.
I Le point le plus important à remarquer est que l’algèbre des opérateurs n’est pas commutativeen général. La composition des opérateurs A et B (deux applications linéaires successives)correspond au produit matriciel AB qui est en général différent de BA. Les éléments de matricede la composition de deux opérateurs, représenté par la matrice produit C = AB, sont donnéspar
Cij =∑k
Aik Bkj ,∀ i, j
(en général 6=
∑k
Bik Akj ⇔ AB 6= BA
). (1.59)
I On généralise : le produit de plusieurs opérateurs n’est pas commutatif.I Par contre, le produit d’opérateurs est associatif et distributif par rapport à l’addition du faitque le produit des matrices qui rerésentent ces opérateurs le soit :
A (BC) = (AB)C , A (B + C) = AB +AC ; (A+B)C = AC +BC . (1.60)
Remarque 1 :Ainsi, on peut remarquer, par exemple, que le produit matriciel étant associatif, dans Eq. (1.51)on peut d’abord effectuer (〈φ|A) puis faire le produit scalaire avec |ψ〉. La dernière expressiondans Eq. (1.51) constitue la notation“bra-ket” d’un élément de matrice d’un opérateur.
Remarque 2 : un projecteur sur un vecteur quelconque |φ〉 ∈ V, noté |φ〉〈φ| (comme parexemple le projecteur de Eq. (1.26)), a pour représentation une matrice. Il découle du produit
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.4. OPÉRATEURS ET REPRÉSENTATION MATRICELLE D’OPÉRATEURS 23
de deux matrices : (N, 1)× (1, N) dans cet exemple.
I En notant par tA ou At la matrice transposée de la matrice A, on peut montrer que
(AB)t = Bt At . (1.61)
I De Eq. (1.61), on peut facilement vérifier que l’opérateur adjoint d’un produit d’opérateursest l’opérateur obtenu en faisant le produit des opérateur adjoints dans l’ordre inverse :
(AB)† = B†A† . (1.62)
1.4.5 Décomposition d’un opérateur en opérateur élémentaires
Soit {|ui〉, i = 1, n} une base orthonormée de l’espace vectoriel V et soit A un opérateurquelconque dont la représentation matricielle est la matrice carrée n × n, A. On peut toujoursécrire un opérateur comme une combinaison linéaires des projecteurs P̂i = |ui〉 〈ui| sur les vec-teurs de la base {|ui〉, i = 1, n} en insérant la relation de fermeture
∑ni=1 |ui〉 〈ui| = 11 comme
suit :
A = 11×A× 11 =n∑j=1
P̂jAn∑i=1
P̂i =n∑
i,j=1
|uj〉 , 〈uj |A|ui〉 〈ui| =n∑
i,j=1
Aji|uj〉 〈ui|. (1.63)
1.4.6 Déterminants
Pour calculer un produit vectoriel, pour résoudre des systèmes linéaires, pour calculer l’in-verse d’une matrice, le produit vectoriel de deux vecteurs, ou même un volume dans un espaceà plusieurs dimensions, etc, nous avons besoin d’utiliser les déterminants. Nous allons dans lasuite rappeler la définition et souligner quelques propriétés utiles.
Définition
Soit B un tableau carré (B peut être une matrice carrée) de n colonne et n lignes dont lesentrées sont réelles ou complexes. Le déterminant, noté |B| de B est défini comme suit :
det(B) = |B| =
∣∣∣∣∣∣∣∣B11 B12 B13 ... B1nB21 B22 B23 ... B2n. . . . . . . . . ... . . .Bn1 Bn2 Bn3 ... Bnn
∣∣∣∣∣∣∣∣ =∑σ∈Gn
(−1)sig(σ) ΠiBi σ(i) , (1.64)
où la somme∑
σ∈Gn se fait sur Gn qui est l’ensemble des permutations à n éléments, {1, 2, ..., n}et où sig(σ) est la signature de la permutation σ :
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
24 1. ALGÈBRE LINÉAIRE
— elle vaut +1 si on effectue un nombre pair de permutations pour retrouver l’ordre initial(1, 2, 3, ..., n) ;
— elle vaut −1 si on effectue un nombre impair de permutations pour retrouver l’ordre ini-tial (1, 2, 3, ..., n) ;
— il y a n! permutations possibles dans un groupe à n éléments {1, 2, 3, ..., n}.
Exemples :
a. Cas d’un tableau 2× 2 : il y a 2! = 2 permutations de l’ensemble {1, 2}, soit {1, 2} avecsig(σ) = +1 ou {2, 1} avec sig(σ) = −1. Ce qui donne
det(B) = |B| =∣∣∣∣ B11 B12B21 B22
∣∣∣∣ = ∑σ∈Gn
(−1)sig(σ) ΠiBi σ(i) = B11B22 −B12B21.
b. Cas d’un tableau 3 × 3 : il y a 3! = 6 permutations de l’ensemble {1, 2, 3}, sig(σ) = +1,{2, 1, 3}, auquel cas sig(σ) = −1, ..., etc. Ce qui donne :
det(B) = |B| =
∣∣∣∣∣∣B11 B12 B13B21 B22 B23B31 B32 B33
∣∣∣∣∣∣= B11B22B33 −B11B23B32 +B12B23B31 −B12B21B33 +B13B21B32 −B13B22B31= B11 (B22B33 −B23B32)−B12 (B21B33 −B23B31) +B13 (B21B32 −B22B31) .
I On remarque grâce à ces deux exemples qu’on peut développer un déterminant d’ordre nselon une ligne ou une colonne à partir d’un élément du tableau (en pratique , on choisit soitla ligne, soit la colonne qui a le plus de zéros pour simplifier le calcul) en pondérant chaquedéterminant d’ordre n − 1 qu’on appelle déterminant mineur obtenu en supprimant la ligne etla colonne correspondante.
Définition du déterminant mineur
Soit un déterminant |B| d’ordre n (voir Eq. (1.64)). On définit le déterminant mineur d’ordren − 1 par le déterminant de la matrice Mij obtenu à partir de la matrice B en supprimant laième ligne et jème colonne correspondant à l’entrée Bij tel que
det(B) =
n∑i=1
(−1)i+j Bij × det (Mij) . (1.65)
I On appelle la matrice cofacteur de la matrice B, la matrice D telle que
det(B) =n∑i=1
BijDij , Dij = (−1)i+jMij . (1.66)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.4. OPÉRATEURS ET REPRÉSENTATION MATRICELLE D’OPÉRATEURS 25
Exemple : avec la matrice B ci-dessous, le calcul de son déterminant par ma méthode précédente(celle des cofacteurs) sera rapide si on suivait soit la deuxième ligne, soit la deuxième colonne,car toutes deux contiennent un zéro :
det(B) = |B| =
∣∣∣∣∣∣1 2 14 0 -1-1 2 2
∣∣∣∣∣∣ = −4∣∣∣∣ 2 12 2
∣∣∣∣+ 0 ∣∣∣∣ 1 1-1 2∣∣∣∣− (−1) ∣∣∣∣ 1 2-1 2
∣∣∣∣ = −4 ,ou alors,
= −2∣∣∣∣ 4 -1-1 2
∣∣∣∣+ 0 ∣∣∣∣ 1 1-1 2∣∣∣∣− 2 ∣∣∣∣ 1 14 -1
∣∣∣∣ = −4.(1.67)
Conséquences : de la définition Eq. (1.65), on peut établir les propriétés suivantes (qu’on peutdémontrer) :
a. Le déterminant est nul si tous les termes d’une ligne ou d’une colonne sont nuls.
b. Si chaque élément d’une ligne ou d’une colonne est multiplé par un même nombre scalaire,alors le déterminant est multiplié par ce scalaire.
c. Si deux lignes ou deux colonnes sont proportionnelles, alors le déterminant est nul. 6.
I Une façon de montrer que des vecteurs sont indépendants : le déterminant d’une famille devecteurs est non nul si les vecteurs de cette famille sont indépendants et réciproquement.
I Le déterminant joue un rôle majeur en algèbre linéaire. On montrera que c’est un invariant.Il a donc la même valeur quelque soit la base choisie pour exprimer la matrice (donc l’opérateurqu’elle représente). S’il existe une base où la matrice est complètement diagonale 7 - base de vec-teurs propres de l’opérateur -, le déterminant est le produit des valeurs propres de ce dernier(le montrer).
Déterminant d’un produit d’opérateurs : Le déterminant d’un produit de deux matrices Aet B (représentant deux opérateurs dans une base canonique donnée) est donné par le produitdes déterminants des deux matrices (quelque soit l’ordre du produit, sachant que le produitmatriciel n’est pas commutatif) :
det(A B) = det(A)det(B) = det(B)det(A) = det(B A). (1.68)
Il s’ensuit que le déterminant d’un produit d’opérateur est le produit des déterminants de cesopérateurs.
6. Une autre façon de dire est que si on identifie chaque ligne (colonne) par un vecteur colonne (vecteur ligne- la transposée du vecteur colonne correspondant -), le déterminant d’une famille de vecteurs est non nul si lesvecteurs de cette famille sont indépendants. En pratique, pour montrer qu’un système est constitué d’équationslinéaires indépendantes, on montre que son déterminant est non nul.
7. Quand un opérateur est diagonalisable, il s’écrit dans la base de ses vecteurs propres sous forme d’unematrice diagonale dont les éléments sont les valeurs propres de cet opérateur.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
26 1. ALGÈBRE LINÉAIRE
1.4.7 Trace d’un opérateur
Soit un opérateur A représenté par la matrice A dans une base orthogonale {|ui〉}, i = 1, n.La trace de la matrice A, que l’on note tr (A), est la somme de ses éléments diagonaux :
tr (A) =∑i
Aii. (1.69)
Propriétés : Il s’agit avant tout d’un invariant - comme c’est le cas du déterminant. La traced’une matrice est indépendante du choix de la base de vecteurs de l’espace vectoriel. S’il existeune base où la matrice est complètement diagonale -base de vecteurs propres de l’opérateur, latrace n’est rien d’autre que la somme des valeurs propres de ce dernier.
I La trace vérifie les propriétés suivantes (facile à démontrer) :
tr (A+B) = tr (A) + tr (B) , (1.70)
tr (AB) = tr (BA) , (1.71)
tr (ABC) = tr (CAB) = tr (BCA) . (1.72)
Remarque : la trace de la matrice identité (11) correspond à la dimension de l’espace vectoriel.
1.5 Inversion de matrice
L’inverse d’un opérateur a pour représentation dans une base orthonormée de l’espace vec-toriel l’inverse de la matrice qui le repésente.
I Soit une matrice A, son inverse A−1 est une matrice telle que
A−1A = AA−1 = 11 . (1.73)
I L’inverse de la matrice A n’est défini que si le déterminant de A est non nul. Les élémentsde la matrice B = A−1 peuvent être calculés grâce à Eq. (1.73) et sont donnés par le rapportentre les éléments de la matrice transposée de la matrice cofacteur (définie dans Eq. (1.66)) etle déterminant de la matrice A :
B = A−1 , B ij =Dt ij
det(A). (1.74)
I Soit la matrice carrée n × n, A. Appelons la matrice cofacteur de A, Cof(A), telle queCof(A) =
((−1)i+j |Aij |
)i,j≤n et considérons sa matrice transposée
tCof(A) ansi que la trans-
posée deA. À l’aide de la définition du déterminant deA (voir Eq. (1.66)), on peut immédiatementvoir que
tCof(A)×A = tA × Cof(A) = det(A)× 11n.
ainsi, si det(A) 6= 0, alors, A−1 = 1det(A)
t
Cof(A). (1.75)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.6. MATRICES UTILES ET LEURS PROPRIÉTÉS 27
Cette dernière équation permet de déterminer l’inverse de toute matrice carrée si son déterminantn’est pas nul.
Exemple : Soit la matrice 3× 3
A =
1 0 22 -1 34 1 8
Pour être inversible, il faudrait calculer son déterminant et vérifier qu’il ne soit pas nul, et sic’est bien le cas, on calcule la matrice des cofacteurs, ce qui donne
det(A) = +1, Cof(A) =
-11 2 2-4 0 16 -1 -1
,enfin, A−1 =
tCof(A)
det(A)=
1 0 22 -1 34 1 8
.On peut vérifier enfin par le calcul que A−1A = 113.
1.6 Matrices utiles et leurs propriétés
1.6.1 Matrices scalaires, triangulaires, nilpotentes et unipotentes
— Une matrice de la forme
A = λ11n, (1.76)
où λ est un scalaire complexe quelconque est appelée matrice scalaire - à ne pas confondreavec une matrice diagonale (voir plus bas). Son produit par une matrice B quelconquem× n donnera la matrice λB. En effet,
si A = λ11n, alors AB = BA = λB, ∀ la matrice B et ∀ le nombre scalaire λ ∈ C.
— Une matrice diagonale est une matrice dont tous les éléments qui ne sont pas sur sadiagonale sont nuls. Le produit de deux matrices A et B diagonales est aussi une matricediagonale C dont les éléments sont les produits des éléments diagonaux de A et de B,
Cii = AiiBii ∀ i ∈ [1, n] . (1.77)
Dans l’équation ci-dessus, bien que les indices dans le membre de droite soient répétés,ils ne sont pas sommés (C11 = A11B11, C22 = A22B22, · · · ).
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
28 1. ALGÈBRE LINÉAIRE
— Si A est une matrice triangulaire supérieure (inférieure) alors sa transposée est unematrice triangulaire inférieure (supérieure).Exemple :
A =
1 2 30 2 40 0 5
, tA = 1 0 02 2 0
3 4 5
.— Une matrice triangulaire A est dite nilpotente (unipotente) si ses coefficients diago-
naux sont nuls (égaux à 1).
— De manière générale, une matrice A est dite nilpotente s’il existe un entier naturel nonnul n ∈ N∗ tel que An = 0.
I Propriétés
À l’aide des définitions ci-dessus, on peut facilement démontrer que :
— le déterminant d’une matrice triangulaire (supérieure ou inférieure) est toujours égal auproduit de ses éléments diagonaux ;
— le déterminant d’une matrice nilpotente est nul ;
— le déterminant d’une matrice n× n unipotente est 1, ∀n.
Exercice 1 : Démontrer les propriétés ci-dessus.
Exercice 2 : Soit A une matrice n× n.
a. Montrer que s’il existe p ∈ N tel que Ap = 0, alors A est nilpotente.
b. Montrer que si A est unipotente, alors ∀p, (A− 11)p = 0.
1.6.2 Matrices unitaires et matrices orthogonales
— Une matrice inversible complexe A représente (relativement à une base orthonormée) unopérateur unitaire U si et seulement si
A† = A−1, autrement dit, A est unitaire ⇐⇒ A†A = AA† = 11. (1.78)
— Une matrice réelle A représente un opérateur orthgonal U (relativement à une baseorthonormée) si et seulement si
At = A−1, autrement dit, A est orthogonale ⇐⇒ AtA = AAt = 11. (1.79)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.6. MATRICES UTILES ET LEURS PROPRIÉTÉS 29
Remarques :
— On peut tout de suite remarquer que si A est une matrice unitaire (orthogonale) alorsles lignes ou les colonnes de A forment une base orthogonale.
— Notons aussi que toute matrice unitaire dont tous les éléments sont réels est une matriceorthogonale.
Propriétés d’une matrice orthogonale
— Une matrice A est orthogonale si et seulement si : A est ‡ coefficients réels, estinversible et son inverse est égale ‡ sa transposée :At = A−1.
— Une matrice n × n est orthogonale si, et seulement si, tous ses vecteurs colonnessont orthogonaux entre eux et de norme 1.Une matrice orthogonale représente ainsi une base orthonormale pour le produitscalaire Euclidien.
— Une matrice carrée est orthogonale si, et seulement si, sa transposée l’est. Il endécoule qu’une matrice carrée est orthogonale si, et seulement si, ses vecteurslignes sont orthogonaux deux ‡ deux et de norme 1.
— Le déterminant d’une matrice orthogonale est de carré 1, c’est-à-dire qu’il est égal‡ +1 ou −1 (Attention, la réciproque est fausse). Une matrice orthogonale est ditedirecte si son déterminant vaut +1 et indirecte s’il vaut −1.
— La multiplication d’un vecteur par une matrice orthogonale préserve sa normeeuclidienne.
— Les matrices orthogonales forment un groupe appelé groupe orthogonal et notéO(n,R) 8.L’ensemble des matrices orthogonales directes (de déterminant égal ‡ 1) formeun sous-groupe du groupe orthogonal, appelé groupe spécial orthogonal et notéSO(n,R). En dimension 3, il s’interprète de manière géométrique comme étantl’ensemble des rotations 9 de l’espace euclidien R3 .
Exercice :Les matrices suivantes sont-elles orthogonales ? et si oui, de quel groupe orthogonal font-ellepartie ?
A =
0 1 00 0 11 0 0
, B( cos θ − sin θsin θ cos θ
).
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
30 1. ALGÈBRE LINÉAIRE
Propriétés d’une matrice unitaire
— Le déterminant d’une matrice unitaire U est de module carré 1 et la matrice U dia-gonalisable et l’ensemble de ses vecteurs propres constituent une base orthonormée(au sens du produit scalaire hermitien) 10.
— Les vecteurs colonnes d’une matrice unitaire forment une base orthonormée pourle produit scalaire hermitien sur Cn Une matrice unitaire représente ainsi une baseorthonormale (pour le produit scalaire hermitien).
— Si U est une matrice unitaire, U∗ l’est aussi et ses vecteurs colonnes constituentaussi une (autre) base orthonormale.
— Une matrice unitaire peut se mettre sous la forme U = exp(iH), où H est unematrice hermitienne H† = H.
Exercice : Montrer que pour toute matrice unitaire, il existe une matrice hermitienne H telleque U = exp(iH).
1.7 Résolution d’un système d’équations linéaires
Un système d’équations linéaires dont les coefficients sont réels ou complexes possède soitune solution unique, soit aucune solution soit une infinité de solutions. La notion de rang d’unematrice permet de trancher cela.
1.7.1 Rang d’une matrice
Soit A une matrice quelconque.
Définition : Le rang d’une matrice A, noté r(A), est l’ordre de la plus grande sous-matricecarrée de A dont le déterminant ne s’annule pas.
Exemple :
Soit la matrice A =
(1 2 10 0 1
)A a 3 sous-matrices dont les déterminants sont :
(1.80)∣∣∣∣ 1 20 0∣∣∣∣ = 0, ∣∣∣∣ 2 10 1
∣∣∣∣ = 2, ∣∣∣∣ 1 10 1∣∣∣∣ = 1 ⇒ r(A) = 2 .
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.7. RÉSOLUTION D’UN SYSTÈME D’ÉQUATIONS LINÉAIRES 31
Théorème général
Soit le système d’équations linéaires Ax = b où A est une matrice m× n, x est l’inconnue- un vecteur m×1 -, et b un vecteur connu m×1. On note Ab la matrice m×n+ 1 forméepar la matrice A augmentée d’une colonne supplémentaire constituée par les composantesdu vecteur b, alors,
a. si r(A) = r(Ab) = n, le système Ax = b a une solution unique ;
b. si r(A) = r(Ab) < n, le système Ax = b a une infinité de solutions ;
c. si r(A) ≤ r(Ab), le système n’admet pas de solution.
Deux cas particuliers se présentent, les systèmes homogènes et les systèmes inhomogènescarrés.
Cas des systèmes homogènes :Dans ce cas (b = 0),
I si det(A) 6= 0 et r(A) = r(Ab) = n, le système Ax = b a une solution unique donnée parx = 0 (triviale) ;
I si det(A) = 0 , alors le système homogène a une solution unique non nulle.
Cas des systèmes inhomogènes carrés :Dans ce cas (m = n) et b 6= 0,
I si det(A) 6= 0 et r(Ab) = n, le système Ax = b a une solution unique donnée par x = A−1b(première condition du théorème).
Exemple : Soit à résoudre Ax = b : 1 1 11 -1 1-1 1 -1
xyz
= -22
-2
,On construit la matrice Ab, Ab =
1 1 1 -21 -1 1 2-1 1 -1 -2
det(A) = 0 → r(A) = 2 = r(Ab) → le système a donc une infinité de solutions.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
32 1. ALGÈBRE LINÉAIRE
1.8 Diagonalisation d’un opérateur
Définitions
a. Une matrice carrée A est diagonalisable s’il existe une matrice P inversible telle que 11
P−1AP = D, (la matrice D étant diagonale). (1.81)
b. L’équation aux valeurs propres d’un opérateur dont la représentation matricielle estune matrice carrée A diagonalisable est donnée par
A|v〉 = λ|v〉, (1.82)
où |v〉 est un vecteur propre de A et λ (complexe en général) est la valeur propre corres-pondante.
1.8.1 Valeurs propres
Diagonaliser un opérateur revient à chercher l’ensemble des valeurs propres et les vecteurspropres associés de la matrice représentant cet opérateur dans une base orthonormée donnée.Déterminer cet ensemble revient à résoudre le système homogème et linéaire
(A− λ11) |v〉 = 0 . (1.83)
Comme on a vu dans la section précédante, ce système n’admet de solution (non triviale) quesi le déterminant de la matrice A− λ11 est nul,
det (A− λ11) = 0 . (1.84)
Si la dimension de l’espace vectoriel est n, alors le déterminant de la matrice A−λ11 (Eq. (1.85))est un polynôme de degrè n dont les racines sont les valeurs propres de A,
det (A− λ11) = P (λ) = 0 . (1.85)
On appelle P (λ) le polynôme caractéristique d’ordre n.
Remarque sur la dégénérescence : s’il existe une valeur propre associée à plus de un vecteurpropre, on dira que cette valeur propre est dégénérée. Le polynôme caractéristique peut avoir desracines λi mutiples gi fois (gi est le degré de multiplicité de la racine λi). On dira que cette valeurpropre est gi fois dégénérée et il lui correspond gi vecteurs propres linéairement indépendants.
11. On peut montrer dans ce cas que l’équation (1.81) peut s’appliquer à toute fonction régulière de la matriceA, puisque, grâce à Eq. (1.77), P−1AnP = Dn, ∀n.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.8. DIAGONALISATION D’UN OPÉRATEUR 33
1.8.2 Vecteurs propres
Pour déterminer le vecteur propre |vi〉 associé à la valeur propre λi, il suffit de résoudre lesystème linéaire pour chercher les n composantes du vecteur |vi〉
A|vi〉 = λi|vi〉 . (1.86)
Une fois toutes les composantes trouvées, on norme le vecteur : |ui〉 = |vi〉/√〈vi|vi〉.
I Si A est diagonalisable, tous les vecteurs propres |vi〉 sont linéairement indépendants, ilsconstituent une base orthonormée de l’espace vectoriel et la matrice P qui diagonalise la ma-trice A (D = P−1AP ) a pour colonnes les vecteurs propres |vi〉.
I On peut toujours décomposer toute matrice diagonalisable sur les projecteurs propres commesuit
A = A
n∑i=1
|vi〉〈vi| =n∑i=1
(A|vi〉) 〈vi| =n∑i=1
λi|vi〉〈vi| =n∑i=1
λiPi , (1.87)
où Pi est le projecteur sur le vecteur propre |vi〉.
Les points ci-dessous sont les conséquences de ce qui a été discuté plus haut. Il ont étérésumés sous forme de théorème facile à démontrer.
ThéorèmeSoit A une matrice carrée n× n.
a. Elle est diagonalisable si elle possède n vecteurs propres indépendants.La matrice D a pour éléments les valeurs propres de A et la matrice P , telle queP−1AP = D, a pour colonnes les vecteurs propres correspondants.
b. Si toutes les valeurs propres sont distinctes (pas de dégénérescence), alors tous lesvecteurs propres sont indépendants.
c. Dans le cas où la matrice A est hermitienne (A = A†) ou symétrique (A = At)alors les vecteurs propres sont linéairement indépendants, même dans le cas dedégénérescence d’une ou plusieurs des valeurs propres.
Conséquences
Comme on vient de le voir, si A est une matrice diagonalisable, alors on peut écrire les relationspour les matrices conjuguée adjointe A† et transposée At :(
P−1AP)t
= Dt = D = P tAt(P−1)t,(P−1AP
)†= D† = D = P †A†(P−1)† .
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
34 1. ALGÈBRE LINÉAIRE
I Si A est une matrice symétrique, (A = At) alors la matrice P qui diagonalise A est unematrice orthogonale : P−1 = P t.
I Si A est une matrice hermitienne (A = A†) , alors la matrice P qui diagonalise A est unematrice unitaire : P−1 = P †.
1.8.3 Retour sur les invariants
Soit A une matrice carrée n × n. Si A est diagonalisable, alors il existe une matrice P telleque det(P ) 6= 0 et telle que D = P−1AP , il s’ensuit que comme
det(D) = det(P−1AP
)= det
(P−1
)det(A)det(P ) = det(A) (car det
(P−1
)= 1/det(P )) ,
alors, le déterminant de A est égal au produit de ses valeurs propres.
det(A) = det(D) = Πni=1λi . (1.88)
De même, on peut prendre la trace de la matrice A,
tr(D) = tr(P−1AP
)= tr
(APP−1
)= tr(A) ,
pour constater que la trace d’une matrice est bien un invariant (indépendant du choix de base)et correspond à la somme des valeurs propres de A,
tr(A) = tr(D) =n∑i=1
λi . (1.89)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
2
Bases non orthonormées, Métriqueset Changement de Base
2.1 Introduction
Dans le chapitre précédent, nous avons toujours untilisé des bases orthonormées et trèssouvent des espaces vectoriels définis sur le corps des complexes. Dans ce chapitre, nous allonsconsidérer des espaces vectoriels définis sur R et des bases non orthonormées, souvent utiles parexemple dans la physique des milieux non continus.
I Soit un espace vectoriel EN sur R de dimension N (nous allons le plus souvent travailleravec des espaces euclidiens de dimension 3). Il existe une infinité d’ensembles de vecteurs {~ei},i = 1, N linéairement indépendants, pas forcément orthogonaux entre eux, formant une base deEN . Nous allons dans ce chapitre aborder la notion de “métrique” ainsi que les changements debase 1.
2.2 Métrique
I On rappelle que tout espace vectoriel défini sur un corps commutatif peut être muni d’unestructure euclidienne dès lors qu’on y définit un produit scalaire. On parle alors d’espace vectorieleuclidien.
— Un produit scalaire est une forme bilinéaire, symétrique et définie positive en métriqueeuclidienne.
— Le produit scalaire de deux vecteurs ~x et ~y ∈ EN est noté
g(~x, ~y) ≡ < ~x|~y >≡ ~x · ~y . (2.1)
1. L’étude des changements de base constitue le premier pas vers l’algèbre des tenseurs, ces derniers généralisantla notion familière de vecteurs et d’opérateurs linéaires en les plaçant dans le cadre mathématique plus larged’algèbre multilinéaire.
-
36 2. BASES NON ORTHONORMÉES, MÉTRIQUES ET CHANGEMENT DE BASE
Définition : Soit B = {~ei}, i = 1, N , une base de EN . On définit la métrique associée à cettebase par les N2 quantités suivantes :
~ei · ~ej = gij . (2.2)
Notation : les indices i et j sont en bas dans l’équation précédente. On remarque que si B estune base orthonormée, alors gij = δ
ij .
I Propriétés :
a. gij = gji, la métriqueg lest symétique ;
b. ∀ ci ∈ R, i = 1, N,∑
i,j cicjgij ≥ 0 (pour assurer que la norme de tout vecteur estpositive ou nulle) 2.
Remarque : le nom “métrique” vient du fait que la métrique (associée à une base) garde unetrace des notions de “longueurs” et d’angles entre les vecteurs de cette base.
I La métrique est donc une matrice carré (N × N) symétrique définie pour une base donnéeB = {~ei} de manière unique (dans cette base) :
g =
~e1 · ~e1 ~e1 · ~e2 ~e1 · ~e3 ... ~e1 · ~eN~e1 · ~e2 ~e2 · ~e2 ~e2 · ~e3 ... ~e2 · ~eN... ... ... ... ...
~e1 · ~eN ~e2 · ~eN ~eN · ~e3 ... ~eN · ~eN
. (2.3)I Pour un espace Euclidien de dimension 3 muni d’une base orthonormée, g est la métriqueeuclidienne (de signature + + +) :
g =
1 0 00 1 00 0 1
. (2.4)I Dans le cadre de la relativité restreinte on travaille dans des espaces de dimension 4 (espaceeuclidien avec la composante temporelle en plus), on utilise la métrique dite Minkowskienne (oùla signature est +−−−) :
g =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
. (2.5)
2. En effet, soit un vecteur quelconque ~V =∑i ci~ei ; sa norme au carré (donc définie positive) s’écrit :
~V · ~V = (∑i ci~ei) · (
∑j cj~ej) =
∑i,j cicjgij .
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
2.3. NOTATION AVEC LA CONVENTION DE SOMMATION D’EINSTEIN 37
2.3 Notation avec la convention de sommation d’Einstein
Soit EN un espace vectoriel réel de dimension N finie et soit B = {~ei}, i = 1, N , une base,pas forcément orthonormée. Les composantes de tout vecteur ~V ∈ EN sont notées Vi - avecindice en bas - de sorte que
~V =N∑k=1
Vk~ek ≡ Vk~ek (convention d’Einstein). (2.6)
I On appelle Vk la composante du vecteur V dans la base B.
Convention d’EinsteinOn rappelle ici la convention : tout indice répété est sommé de sorte que l’on puisse écrire, parexemple, tout vecteur sur une base comme ~V = Vj~ej .
2.3.1 Changement de base
Considérons deux bases différentes de EN : B = {~ei} et B′ = {~e′i} et notons α et son inverseα−1 les matrices de passage de la base B à la base B′, et de la base B′ à la base B, respectivement :
~ei′ =
∑j
αij ~ej (2.7)
~ek =∑m
(α−1
)km
~e ′m . (2.8)
DéfinitionLa matrice de passage α de {~ei} à {~ei′} est telle que sa ième colonne est formée descomposantes de ~ei
′ par rapport à la base {~ei}, elle s’écrit donc dans la base B comme :
α =
(~e′1)1 (~e′2)1 (~e′3)1 ... (~e′N )1(~e′1)2 (~e′2)2 (~e′3)2 ... (~e′N )2... ... ... ... ...
(~e′1)N (~e′2)N (~e′3))N ... (~e′N )N
, autrement dit, αij = (~e′i)j . (2.9)
I Cas des vecteurs
Considérons un vecteur ~V ∈ EN et écrivons-le dans les deux bases {~ei} et {~ei′} :
~V =N∑k=1
Vk ~ek =N∑i=1
V ′i ~ei′ . (2.10)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
38 2. BASES NON ORTHONORMÉES, MÉTRIQUES ET CHANGEMENT DE BASE
En exprimant les vecteurs ~ek dans la base B′, Eq. (2.8),
~V =N∑k=1
Vk ~ek =N∑k=1
Vk∑m
(α−1
)km~em
′
=∑m
(α−1
)km
Vk ~em′ (convention d’Einstein sur k)
=N∑m=1
V ′m ~em′ = V ′m ~em
′ (convention d’Einstein sur m) . (2.11)
De même, en exprimant les vecteurs ~ei′ dans la base B, Eq. (2.7), on peut écrire les relations
entre les composantes de ~V exprimées dans les deux bases :
V ′i =N∑k=1
(α−1)ik Vk = (α−1)ik Vk
Vj =
N∑k=1
αjk V′k = αjk V
′k, (2.12)
RésuméLors d’un changement de base B = {~ei} → B′ = {~e′i} caractérisé par la matrice de passageα, telle que ~ei
′ =∑
j αij ~ej , les composantes des vecteurs dans les deux bases sont donnéespar les relations de l’équation (2.12) qu’on peut écrire sous la forme compacte suivante :
~V = α ~V ′ ; ~V ′ = α−1 ~V . (2.13)
I Cas des opérateurs
Considérons à présent un opérateur linéaire A tel que ∀ ~V ∈ EN → A ~V ∈ EN .
La représentation matricielle A de l’opérateur A dans la base B = {~ei} est une matrice carréeN ×N telle que sa ième colonne soit le vecteur A ~ei,
A ~ei =
N∑j=1
Aji ~ej (2.14)
= Aji ~ej ( convention d’Einstein sur j) . (2.15)
Il en est de même pour n’importe quelle base B′ = {~ei′}, obtenue par changement de base,Eq. (2.7), à partir de la base B. En cherchant à exprimer les éléments de matrice de A dans les
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
2.3. NOTATION AVEC LA CONVENTION DE SOMMATION D’EINSTEIN 39
deux bases, on a :
A ~ei′ =
N∑j=1
A′ji ~ej′ = A′ji ~ej
′ (convention d’Einstein sur j) ,
A ~ei′ = A
(N∑`=1
αi` ~e`
)
=N∑`=1
αi` A ~e` =N∑
`,m=1
αi` Am` ~em =N∑j=1
N∑`,m=1
αi` Am` (α−1)mj ~ej
′
= αi` Am` (α−1)mj ~ej
′(convention d’Einstein sur `, m, et j) ,
d’où,
A′ji = αi` Am` (α−1)mj .
De manière plus compacte, la relation entre la matrice dans B et dans B′ est donnée par :
A′ = α−1TA αT . (2.16)
Résumé :Connaissant la matrice A dans B′, elle s’écrit dans B comme A = αT A′ α−1T .Inversement, on peut écrire que A′ = α−1
TA αT .
En observant les équations (2.13) et (2.16), on remarque que les vecteurs ne mettent en jeuqu’une seule matrice de passage lors d’un changement de base alors qu’il en faut deux (α−1 etα) pour transformer un opérateur linéaire.
2.3.2 Conséquences du changement de base sur la métrique g
Considérons un changement de base donné par la matrice de passage α de la base B à la baseB′ de EN et observons comment la métrique se transforme. Soit gij = ~ei · ~ej et g′ij = ~e ′i · ~e ′j(chaque métrique étant associée à sa propre base) :
g′ij ≡ ~ei ′ · ~ej ′ = αik αj` ~ek · ~e` = αik αj` gk` . (2.17)
I Contrairement aux matrices carrés, la métrique g se transforme lors d’un changement de baseselon Eq. (2.17) - nécessitant donc deux matrices α -( les matrices nécessitant α−1 et α).
I On dira que la métrique g est un tenseur de rang 222 : objet mathématique dont les composantescaractérisées par deux indices se transforment lors d’un changement de base selon Eq. (2.17)avec deux matrices α. Le vecteur quant à lui est un tenseur de rang 111, nécessitant une seulematrice α lors d’un changement de base. Enfin, les nombres scalaires (produit scalaire, ...) sontinvariants par changement de base, ils sont donc des tenseurs d’ordre 000.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
40 2. BASES NON ORTHONORMÉES, MÉTRIQUES ET CHANGEMENT DE BASE
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
Deuxième partie
Équations Différentielles
-
1
Équations Différentielles Ordinaires
Dans toute la suite EDO = équation différentielle ordinaire.
1.1 Généralités
EDO d’ordre n
Une EDO d’ordre n est une équation
F[x, y(x), y′(x), . . . , y(n)(x)
]= 0 (1.1)
qui met en relation une fonction y(x) et ses dérivées y′(x), y′′(x),. . ., y(n)(x) par rapport à uneseule variable x ∈ R. L’ordre n de l’équation différentielle est fixé par la plus haute dérivéeprésente dans l’équation. On notera aussi
y′(x) =dy
dx, y′′(x) =
d2y
dx2, y(p)(x) =
dpy
dxp
pour la première, la deuxième et la p-ième dérivée de y(x). D’autres cours peuvent utiliserẏ(x), ÿ(x) pour première et deuxième dérivées.
Solutions explicites & implicites
Une fonction y = φ(x) définie sur un intervalle I est une solution explicite d’une EDO(1.1) si
F[x, φ(x), φ′(x), . . . , φ(n)
]= 0
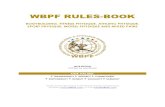
pour tout x ∈ I. On imagine cette solution explicite comme dans la figure 1.1-(a).
Une relation g(x, y) = 0 est une solution implicite d’une EDO (1.1) sur un intervalle I, si
(a.) Il existe une fonction φ(x) définie sur I telle que g(x, φ(x)) = 0
-
44 1. ÉQUATIONS DIFFÉRENTIELLES ORDINAIRES
(a) Solution explicite : pour unevaleur de x, une seule valeur y
(b) Solution implicite : pourune valeur de x, plusieurs va-leurs y
(c) Solution générale : une famillede solutions paramétrisée par une(ou plusieurs) constante(s) arbi-traire(s)
Figure 1.1 – Solution explicite, implicite & générale.
(b.) Si
F[x, φ(x), φ′(x), . . . , φ(n)(x)
]= 0
pour tout x ∈ I.Cette définition est abstraite, mais on peut facilement imaginer un cas concret. Si pour un mêmex, plusieurs solutions y(x) existent, comme illustré dans la figure 1.1-(b), il est souvent plus faciled’écrire la solution comme g(x, y) = 0.
Solution générale & particulière
Une solution générale d’une EDO dépend de une ou plusieurs constantes arbitrairesC1, C2, C3, . . . et permet en les variant d’obtenir l’ensemble des fonctions qui satisfont l’équationdifférentielle. On imagine cette solution comme figure 1.1-(c), c.a.d. comme la collection decourbes que l’on obtient en variant ici C.
Une solution est une solution particulière, si elle ne dépend pas de constantes arbitraires.On l’imagine comme une des solutions contenues dans la solution générale.
Conditions initiales & conditions aux limites
Un problème aux Conditions Initiales (CI) est défini par une EDO d’ordre n ≥ 1accompagnée de exactement n conditions supplémentaires de la forme :
CI : y(x0) = A0 , y′(x0) = A1 , y
(n−1)(x0) = An−1
Les conditions initiales fixent la valeur de la fonction et de ses n− 1 premières dérivées en ununique point initial x0.
Un problème aux Conditions aux Limites (CL) est défini par une EDO d’ordre n ≥ 2accompagnée de exactement n conditions supplémentaires de la forme
CL : y(x0) = B0 , y(x1) = B1 , y(n−1)(x2)− y(3)(x2) = Bn−1
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.2. EDO’S LINÉAIRES 45
Les conditions aux limites fixent des combinaisons (pas forcément linéaires) de la fonction et/ouses n− 1 premières dérivées en plusieurs points x0, x1, x2, . . ..
1.2 EDO’s linéaires
1.2.1 Définition & principe de superposition
EDO linéaire
Une EDO (1.1) est linéaire, si la fonction F est linéaire dans toutes les variables y et sesdérivées. C’est à dire que ∀a, b ∈ R et toutes les fonctions y(x) et z(x) :
F[x, ay(x) + bz(x), ay′(x) + bz′(x), . . . , ay(n)(x) + bz(n)(x)
]= aF
[x, y(x), y′(x), . . . , y(n)(x)
]+ bF
[x, z(x), z′(x), . . . , z(n)(x)
]On peut se convaincre qu’une EDO linéaire d’ordre n sera de la forme
y(n) + an−1(x)y(n−1) + . . .+ a1(x)y
′ + a0(x)y = b(x) (1.2)
avec ai(x), b(x) des fonctions arbitraires. Si b(x) 6= 0 on dit que l’équation est inhomogène, sib(x) = 0 l’équation est homogène. Une équation homogène a toujours y = 0 comme solution,on parle de la solution triviale. Si les fonctions ai(x) = ai sont plutôt des constantes, on parled’une EDO linéaire à coefficients constants.
Principe de superposition & forme générale de la solution
La linéarité d’une EDO permet d’appliquer le principe de superposition : si φ(x) et ψ(x)sont deux solutions de l’EDO linéaire, alors toute combinaison linéaire de aφ(x) + bψ(x) resteraune solution. Ce principe a la conséquence suivante.
La solution générale d’une EDO linéaire d’ordre n quelconque (1.2), sera toujours dela forme :
y(x) =n∑i=1
Ciφi(x)︸ ︷︷ ︸yh(x)
+yp(x) (1.3)
La solution homogène yh(x) est elle même une superposition arbitraire de n solutions linéairementindépendantes φi(x), {i = 1, 2, . . . , n} de l’EDO homogène. Ces fonctions satisfont donc
∀i ∈ {1, 2, . . . , n} : φ(n)i (x) + an−1(x)φ(n−1)i (x) + . . .+ a1(x)φ
′i(x) + a0(x)φi(x) = 0
etn∑i=1
Diφi(x) = 0 ⇔ Di = 0 , ∀i ∈ {1, 2, . . . , n}
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
46 1. ÉQUATIONS DIFFÉRENTIELLES ORDINAIRES
La solution particulière sera une seule solution de l’EDO complet :
y(n)p + an−1(x)y(n−1)p + . . .+ a1(x)y
′p + a0(x)yp = b(x)
On vérifie aisément que dans ces conditions, la solution (1.3) satisfait l’EDO (1.2), quelque soitles valeurs des n constantes arbitraires Ci, {i = 1, 2, . . . , n}.
1.2.2 EDO’s linéaires à coefficients constants
Ordre 1
L’EDO linéaire du premier ordre à coefficients constants est
dy
dx+ ay = b(x)
avec a une constante et b(x) une fonction quelconque. On peut chercher solutions homogènes etparticulières séparément, mais ici il faut mieux faire tout à la fois. Pour trouver la solution, onmultiplie cette EDO avec eax, on voit alors que
d
dx
[y eax
]= b(x) eax
On intègre par rapport à x, pour trouver
y eax = C +
x∫b(x̃) eax̃ dx̃
⇔ y = Ce−ax︸ ︷︷ ︸yh
+ e−ax
x∫ b(x̃) eax̃ dx̃
︸ ︷︷ ︸yp
La constante arbitraire C donc apparait comme une constante d’intégration.
Ordre n
Une EDO linéaire d’ordre n à coefficients constants est
dny
dx+ an−1
dn−1y
dx+ . . .+ a1
dy
dx+ a0y = b(x)
avec ai des constantes et b(x) une fonction quelconque. On cherche yh(x) et yp(x) séparément.
• Solution homogène yh(x) :
Si on écrit l’EDO homogène comme(dn
dx+ an−1
dn−1
dx+ . . .+ a1
d
dx+ a0
)yh = 0 (1.4)
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.2. EDO’S LINÉAIRES 47
on peut tenter de factoriser l’opérateur différentiel comme(d
dx− λ1
)(d
dx− λ2
). . .
(d
dx− λn
)yh = 0
Ici les λi , i ∈ {1, . . . , n} s’identifient alors aux racines du polynôme caractéristique :
λn + an−1λn−1 + . . .+ a1λ+ a0 = 0
Pour ai ∈ R, les racines λi, i ∈ {1, . . . , n} seront réelles où complexe conjuguées par pair.Afin d’écrire la solution, on doit distinguer deux cas différents :
a. Si toutes les racines λi sont différentes, la solution de l’EDO sera une superpositionarbitraire de fonctions exponentielles :
yh(x) = C1 eλ1x + C2 e
λ1x + . . .+ Cn eλnx (1.5)
On remarque immédiatement que chaque terme est solution d’une EDO d’ordre 1 :(d
dx− λj
)eλjx = 0
que l’on retrouve dans la factorisation (1.4). Comme on peut changer arbitrairementl’ordre des opérateurs (d/dx− λj) dans (1.4), on comprend d’où vient la solution (1.5).
b. S’il y a des racines multiples, la partie de la solution associée à ces racines ne sera passeulement composée de fonctions exponentielles. Regardons le cas spécifique de l’équationarchétype avec une racine double :(
d
dx− λ
)(d
dx− λ
)y(x)︸ ︷︷ ︸
= u(x)
= 0
Comme la notation le suggère, on résolve cette équation en faisant une étape intermédiairepassant par la fonction u(x), solution de(
d
dx− λ
)u(x) = 0 ⇒ u(x) = C1eλx
Ensuite on trouve y(x) solution d’une EDO inhomogène d’ordre 1 à l’aide de la méthodespécifiée au dessus :(
d
dx− λ)y(x) = C1e
λx ⇒ y(x) = (C1x+ C2)︸ ︷︷ ︸P1(x)
eλx
La solution est un polynôme arbitraire d’ordre 1 (noté P1(x) ici) qui multiplie le facteurexponentiel habituel.
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
48 1. ÉQUATIONS DIFFÉRENTIELLES ORDINAIRES
On généralise aisément à des cas de racines de multiplicités k > 2, en faisant k−1 étapesintermédiaires(
d
dx− λ)k
y(x) = 0 ⇒ y(x) =(C1 + C2x+ . . .+ Ckx
k−1)
︸ ︷︷ ︸Pk−1(x)
eλx
La solution associée à une racine λ de multiplicité k est un polynôme arbitraire d’ordrek − 1 (noté Pk−1(x) ici) qui multiplie le facteur exponentiel eλx.
Comme un polynôme arbitraire d’ordre 0, est une constante arbitraire on peut regrouper lesdeux cas en une seule formule. La solution homogène se laisse toujours écrire sous la forme
yh(x) =∑j
Pkj−1(x) eλjx
La somme parcourt les différentes valeurs propres λj et on note kj la multiplicité de la valeurpropre λj .
• Solution particulière yp(x) :
Trouver une solution particulière est immédiate dans 2 cas :
a. Cas constant ou polynômial : b(x) = c0 + c1x+ . . .+ cpxp
On cherche yp(x) comme un polynôme du même ordre
yp(x) = D0 +D1x+ . . .+Dpxp
Injecté dans l’EDO, on trouvera p+ 1 équations algébriques pour Di par l’identification(membres de gauche, droite) des coefficients devant les différentes puissances en xi. Ceséquations peuvent être résolues en cascade : Dp → Dp−1 → . . .→ D0.
b. Cas d’une somme d’exponentielles : b(x) =∑
p cpeαpx
Si b(x) est composé de exponentielles, ou de fonctions trigonométriques (sin, cos) ouhyperboliques (sinh, cosh) qui se laissent écrire comme des sommes d’exponentielles, onpeut chercher la solution particulière comme
yp(x) =∑p
Dpeαpx
On injecte cette solution dans l’EDO et on trouve des équations algébriques pour Di, i ∈{1, . . . , p} par identification (membres de gauche, droite) des coefficients devant les différentesexponentielles. Cette méthode ne marche pas si l’un des αi cöıncide avec une racine λide la solution homogène.
Dans le cas où b(x) est une fonction quelconque, il n’est pas si évident de trouver unesolution particulière. On apprendra une méthode systématique dans le chapitre suivant et onpourra également utiliser l’analyse de Fourier (3ième partie de ce cours).
- Licence de Physique et Applications - Année 2016-2017A. Abada et W. Herreman
-
1.2. EDO’S LINÉAIRES 49
Exemple :
On cherche à résoudre l’EDOy′′ + 3y′ + 2y = x2
Le polynôme caractéristique se factorise aisément
λ2 + 3λ+ 2 = (λ+ 1)(λ+ 2) ⇒ λ1 = −1 , λ2 = −2
La solution homogène est donc
yh(x) = C1e−x + C2e
−2x
On propose une solution particulière de la forme
yp(x) = Ax2 +Bx+ C
Injecté dans l’EDO, ceci donne un système linéaire
2A+ 6Ax+ 2Ax2 + 3B + 2Bx+ 2C = x2 ⇒
2A = 1
6A+ 2B = 02A+ 3B + 2C = 0
On trouve
A =1
2, B = −3
2, C =
7
4
La solution générale est donc
y(x) = C1e−x + C2e
−2x +
(x2
2− 3x
2+
7
4
)
Imposer des conditions initiales
Si on muni l’EDO de CI, on exprimera ces conditions un par un. Ceci mènera à un systèmelinéaire algébrique pour les coefficients arbitraires, qui apparaissent dans la solution homogène.Ce système algébrique a toujours une solution unique.
Exemple (suite) :
Au précédent problème, on ajoute
CI : y(0) = 1 , y′(0) = 0
On exprime ces deux conditions à l’aide de la solution générale{C1 + C2 + 7/4 = 1
−C1 − 2C2 − 3/2 = 0⇔
{C1 = 0C2 = −3/4
La solution unique du problème aux CI est donc
y(x) = −34e−2x +
(x2
2− 3x
2+
7
4
)- Licence de Physique et Applications - Année 2016-2017
A. Abada et W. Herreman
-
50 1. ÉQUATIONS DIFFÉRENTIELLES ORDINAIRES
Imposer des conditions aux limites
Si on muni l’EDO linéaire de CL, on va également trouver un système linéaire algébriquepour les coefficients arbitraires Ci, {i = 1, 2, . . . , n}. Ce système algébrique peut avoir aucune,une ou une infinité de solutions.
Exemple :
On considère le problème aux CL suivant
d2y
dx2+ k2y = 0 , CL : y(0) = 0 , y(L) = 1
La solution générale de l’EDO est
y(x) = C1eikx + C2e
−ikx = D1 sin kx+D2 cos kx
Les CL fixent {D2 = 0
D1 sin kL = 1, D1 =
1
sin kL
On trouve donc
y(x) =sin kx
sin kL
comme solution d