Lyapunov Stabilitat¨ - Startseite TU Ilmenau · Kapitel 2 Lyapunov Stabilitat¨ In diesem Kapitel...
18
Kapitel 2 Lyapunov Stabilit¨ at In diesem Kapitel soll es um die Stabilit¨ atstheorie von Gleichgewichten (siehe Definition 1.9) ge- hen. Erneut wird dabei der Anfangswert bei festgehaltener Anfangszeit variiert. Jedoch wird das L¨ osungsverhalten jetzt auf in positiver Zeitrichtung unbeschr¨ ankten Intervallen betrachtet — im Gegensatz zu den in Abschnitt 1.1 hergeleiteten Resultaten f¨ ur kompakte Zeitintervalle. Bevor wir in den sp¨ ateren Abschnitten Methoden zur Stabilit¨ atsanalyse, insbesondere so genannte Lyapu- nov Funktionen, kennenlernen, soll im folgenden Abschnitt 2.1 erstmal der Stabilit¨ atsbegriff nach Lyapunov gem¨ aß [2, Abschnitt 7.4] pr¨ azisiert werden. 1 2.1 Der Stabilit ¨ atsbegriff Obwohl wir uns in diesem Kapitel im Wesentlichen mit dem Stabilit¨ atsverhalten von Gleichge- wichtsl¨ osungen besch¨ aftigen wollen, werden die entsprechenden Begrifflichkeiten in diesem Ab- schnitt f ¨ ur allgemeine L ¨ osungen definiert. Definition 2.1. [Asymptotische Stabilit¨ at] Eine auf einem Intervall I =(t − , ∞) ⊂ R gegebene L¨ osung x ⋆ : I → R d der Differentialgleichung (1.2) heißt • stabil, falls es zu jedem (ε, t 0 ) ∈ R >0 × I ein δ> 0 gibt, so dass f¨ ur alle Anfangswerte ξ ∈{x ∈ R d : ‖ξ − x ⋆ (t 0 )‖ <δ} die L¨ osung x(·; t 0 ,ξ ) f¨ ur alle Zeiten t ∈ R ≥t 0 existiert und der folgenden Absch¨ atzung gen ¨ ugt ‖x(t; t 0 ,ξ ) − x ⋆ (t)‖ <ε ∀ t ≥ t 0 . (2.1) Falls die L¨ osung x ⋆ (·) nicht stabil ist, wird sie instabil genannt. • attraktiv, falls es zu jedem t 0 ∈ I ein η> 0 gibt, so dass f¨ ur alle Anfangswerte ξ ∈{x ∈ R d : ‖ξ − x ⋆ (t 0 )‖ <η} die L¨ osung x(·; t 0 ,ξ ) f¨ ur alle Zeiten t ∈ R ≥t 0 existiert und gegen x ⋆ (·) konvergiert, das heißt lim t→∞ ‖x(t; t 0 ,ξ ) − x ⋆ (t)‖ =0. (2.2) Die Menge {(t 0 ,ξ ) ∈ I × R d : x(·; t 0 ,ξ ) erf¨ ullt (2.2)} wird Einzugsbereich von x ⋆ (·) ge- nannt. 1 Alexander Michailowitsch Lyapunov (1857-1918) war ein russischer Ingenieur und Mathematiker. 11
Transcript of Lyapunov Stabilitat¨ - Startseite TU Ilmenau · Kapitel 2 Lyapunov Stabilitat¨ In diesem Kapitel...

Kapitel 2
Lyapunov Stabilitat
In diesem Kapitel soll es um die Stabilitatstheorie von Gleichgewichten (siehe Definition 1.9) ge-
hen. Erneut wird dabei der Anfangswert bei festgehaltener Anfangszeit variiert. Jedoch wird das
Losungsverhalten jetzt auf in positiver Zeitrichtung unbeschrankten Intervallen betrachtet — im
Gegensatz zu den in Abschnitt 1.1 hergeleiteten Resultaten fur kompakte Zeitintervalle. Bevor wir
in den spateren Abschnitten Methoden zur Stabilitatsanalyse, insbesondere so genannte Lyapu-
nov Funktionen, kennenlernen, soll im folgenden Abschnitt 2.1 erstmal der Stabilitatsbegriff nach
Lyapunov gemaß [2, Abschnitt 7.4] prazisiert werden.1
2.1 Der Stabilitatsbegriff
Obwohl wir uns in diesem Kapitel im Wesentlichen mit dem Stabilitatsverhalten von Gleichge-
wichtslosungen beschaftigen wollen, werden die entsprechenden Begrifflichkeiten in diesem Ab-
schnitt fur allgemeine Losungen definiert.
Definition 2.1. [Asymptotische Stabilitat] Eine auf einem Intervall I = (t−,∞) ⊂ R gegebene
Losung x⋆ : I → Rd der Differentialgleichung (1.2) heißt
• stabil, falls es zu jedem (ε, t0) ∈ R>0 × I ein δ > 0 gibt, so dass fur alle Anfangswerte
ξ ∈ x ∈ Rd : ‖ξ − x⋆(t0)‖ < δ die Losung x(·; t0, ξ) fur alle Zeiten t ∈ R≥t0 existiert
und der folgenden Abschatzung genugt
‖x(t; t0, ξ)− x⋆(t)‖ < ε ∀ t ≥ t0. (2.1)
Falls die Losung x⋆(·) nicht stabil ist, wird sie instabil genannt.
• attraktiv, falls es zu jedem t0 ∈ I ein η > 0 gibt, so dass fur alle Anfangswerte ξ ∈ x ∈Rd : ‖ξ − x⋆(t0)‖ < η die Losung x(·; t0, ξ) fur alle Zeiten t ∈ R≥t0 existiert und gegen
x⋆(·) konvergiert, das heißt
limt→∞
‖x(t; t0, ξ)− x⋆(t)‖ = 0. (2.2)
Die Menge (t0, ξ) ∈ I × Rd : x(·; t0, ξ) erfullt (2.2) wird Einzugsbereich von x⋆(·) ge-
nannt.
1Alexander Michailowitsch Lyapunov (1857-1918) war ein russischer Ingenieur und Mathematiker.
11

12 KAPITEL 2. LYAPUNOV STABILITAT
• asymptotisch stabil, falls sie stabil und attraktiv ist.
Sowohl fur den Nachweis der Stabilitat als auch fur die Uberprufung der Attraktivitat einer Losung
x⋆(·) reicht es aus, die jeweilige Eigenschaft fur eine beliebige Anfangszeit t⋆0 ∈ I zu verifizieren.
Denn die Abweichung der Losungen x(·; t0, ξ)− x⋆(·) kann fur eine beliebige, aber fest gewahlte
Anfangszeit t0 ∈ I , t0 6= t⋆0, wegen der Stetigkeit bzgl. des Anfangswerts auf dem kompakten
Intervall [mint0, t⋆0,maxt0, t⋆0] beliebig klein gemacht werden; fur Details sei auf die Ubungen
verwiesen.
Stabilitat einer Losung bedeutet also, dass – fur beliebig, aber fest gewahltes t0 ∈ I – alle Losungen
x(t; t0, ξ) fur t ≥ t0 in einem ε-Schlauch um die Losung x⋆(·) bleiben, wenn ihr Anfangswert ξsich nur in einer hinreichend kleinen Umgebung Bδ(x
⋆(t0)) befindet. Ahnlich verhalt es sich mit
der Akktraktivitat. Hier folgert man, dass die Losungen fur t → ∞ gegen die Referenzlosung
x⋆(·) konvergieren — kann also aus einer Forderung an den Anfangswert eine Aussage uber das
Langzeitverhalten fur alle t ≥ t0 folgern. Kombiniert mit der Stabilitat folgt dann, dass sich die
Losungen in ihrer transienten Phase ebenfalls in der Nahe von x⋆(·) aufhalten.
Jedoch sollte man nicht den Fehler machen, aus der Attraktivitat einer Losung ihre Stabilitat zu
folgern. Dies zeigt das folgende Beispiel einer attraktiven aber instabilen Differentialgleichung
zeigt ([2, Beispiele 7.4.16]).
Beispiel 2.2. Betrachte die in Polarkoordination gegebene autonome Differentialgleichung
r(t) = r(t)(1− r(t)) Φ(t) = sin2(
Φ(t)
2
)
mit Losung (die Gleichung ist bzgl. ihrer Variablen r und Φ separiert; zu beachten ist, dass bzgl. der
zweiten Losungskomponente in Abhangigkeit des Anfangswerts ein geeigneter Zweig des Arcus-
tangens zu wahlen ist, um Wohldefiniertheit und Stetigkeit sicherzustellen)
(
r0r0 + (1− r0)e−t
, 2 arctan
(
2 sinΦ0
2 cosΦ0 − t sinΦ0 + 2
))
.
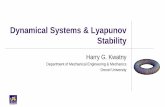
x⋆(·; 0, (1 0)T ) ist eine Gleichgewichtslosung, die attrahierend wirkt auf ganz R2\0. Diese
Losung ist aber nicht stabil, da Losungen mit Anfangswerten ξi := (cos(10−i) sin(10−i))T , i ∈ N,
zwar beliebig nah an (1 0)T starten, sich jedoch anfangs entlang des Einheitskreises entfernen be-
vor sie fur hinreichend große Zeiten t gegen (1 0)T konvergieren, siehe Abbildung 2.1 und die
angegebene Losungsdarstellung.
Ein Sonderfall sind skalare Differentialgleichungen. Bei diesen kann man direkt aus der Attrakti-
vitat auf die Stabilitat schließen.
Satz 2.3. [Attraktivitat und Stabilitat skalarer Differentialgleichungen] Sei eine skalare Differenti-
algleichung der Form (1.2) auf einer offenen Menge D ⊆ R2 mit stetigem und bzgl. x Lipschitz-
stetigem Vektorfeld f : R × R → R gegeben. Sei zudem x⋆ : I → R, I = (t−,∞), eine
attrahierende (attraktive) Losung. Dann ist x⋆(·) auch stabil.

2.1. DER STABILITATSBEGRIFF 13
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
x1
x2
Anfangswerte
Gleichgewichte
Abbildung 2.1: Darstellung einiger Losungen im Phasenraum zu Beispiel 2.2.
Beweis: Seien t0 ∈ I und ε > 0 gegeben. Wegen der Attraktivitat der Losung x⋆(·) existiert ein
η > 0, so dass limt→∞ |x(t; t0, ξ) − x⋆(t)| = 0 fur alle ξ ∈ (x⋆ − η, x⋆ + η) gilt. Entsprechend
gibt es fur die beiden Losungen x(·; t0, ξ), ξ = x⋆ ± η/2, ein T ≥ t0 mit der Eigenschaft
|x(t; t0, ξ)− x⋆(t)| < ε ∀ t ≥ T.
Aus der Skalaritat der DGL und der Eigenschaft, dass sich deren Losungen nicht scheiden konnen,
folgt die Gultigkeit dieser Ungleichung fur alle ξ ∈ Bη/2(x⋆(t0)). Nutzt man nun die stetige
Abhangigkeit der Losungen bzgl. ihrer Anfangswerte aus, kann man zeigen, dass diese Unglei-
chung auch auf dem kompakten Intervall [t0, T ] fur Anfangswerte ξ ∈ Bδ(x⋆(t0)), δ ≤ η/2, ihre
Gultigkeit behalt, was die gewunschte Aussage fur eben jenes δ impliziert.
Bis jetzt wurde alles fur allgemeine zeitvariante Losungen gezeigt. Abschließend wollen wir zei-
gen, dass man sich stattdessen immer auf die triviale Losung zuruckziehen kann, wenn man die
so genannte Differentialgleichung der gestorten Bewegung betrachtet. Jedoch zahlt man den Preis,
dass man eine nichtautonome Differentialgleichung erhalt — selbst dann, wenn die Ausgangsglei-
chung autonom war.
Satz 2.4. Gegeben sei die Differentialgleichung (1.2) auf einer offenen Menge D ⊆ R × Rd mit
stetigem und bzgl. x Lipschitz-stetigem Vektorfeld f sowie eine Losungstrajektorie x⋆ : I → Rd,
I = (t−,∞). Betrachte zudem die Differentialgleichung der gestorten Bewegung
y(t) = f(t, y(t) + x⋆(t))− f(t, x⋆(t)), (2.3)
die mittels der Transformation y = x−x⋆ aus (1.2) hervorgegangen ist. Dann besitzt die DGL (2.3)
die triviale Losung, die genau dann stabil bzw. attraktiv ist, wenn x⋆ bzgl (1.2) stabil bzw. attraktiv
ist.

14 KAPITEL 2. LYAPUNOV STABILITAT
Beweisskizze: Sei die Losung x⋆(·) stabil fur die DGL (1.2). Des Weiteren sei (t0, ε) ∈ I ×R>0 gegeben. Dann existiert ein δ > 0, so dass alle Losungen x(·; t0, ξ), ξ ∈ Bδ(x
⋆(t0)), der
Abschatzung ‖x(t; t0, ξ)− x⋆(t)‖ ≤ ε, t ≥ t0, genugen. Nutzt man die Identitat2
y(t; τ, η) ≡ x(t; τ, η + x⋆(τ))− x⋆(t)
fur eine Losung y(·; τ, η) von (2.3), erhalt man
‖y(t; t0, η)‖ = ‖x(t; t0, η + x⋆(t0))− x⋆(t)‖ < ε ∀ t ≥ t0 und η ∈ Bδ(x⋆(t0))
mit η = (η + x⋆(t0)) − x⋆(t0), was die Stabilitat der trivialen Losung fur (2.3) impliziert. Die
Ruckrichtung zeigt man analog mit Hilfe der Identitat x(·; τ, ξ) ≡ y(·; τ, ξ − x⋆(τ)) + x⋆(·),siehe [2, Beweis von Satz 7.4.10]. Ebenso folgt die Attraktivitat.
2.2 Stabilitat autonomer Systeme
Im vorhergehenden Abschnitt 2.1 wurden erste Stabilitatsbegriffe eingefuhrt. In diesem Abschnitt
werden so genannte Lyapunov Funktionen eingefuhrt, die ein weit verbreitetes Hilfsmittel zum
Stabilitatsnachweis sind. Dabei orientieren wir uns an den Lehrbuchern [9, Abschnitt 4.1] und [3,
Abschnitt 1.7]. Beginnen wollen wir diesbezuglich mit autonomen Differentialgleichungssystemen
der Form
x(t) = f(x(t)) (2.4)
und der Stabilitat von Gleichgewichten x⋆.3 Zur Veranschauung des weiteren Vorgehens betrachten
wir erneut das Pendelmodell aus Beispiel 1.10, jedoch in der Variante mit Reibung.
Beispiel 2.5. Das Pendel mit Reibung wird durch die autonome Differentialgleichung
x1(t)x2(t)
==
x2(t)−a sin(x1(t))− bx2(t)
(2.5)
mit Vektorfeld f : R2 → R2 beschrieben. Der Parameter a > 0 entspricht dem Quotienten g/l,
wobei g wie in Beispiel 1.10 der Erdbeschleunigung und l der Lange des Pendels entspricht. Die
Gleichgewichte bleiben bei x⋆0 = (0 0)T und x⋆1 = (π 0)T (alle weiteren Gleichgewichte kann
man mit einem dieser beiden identifizieren). Wie in Abbildung 1.3 gesehen, ist das Gleichgewicht
(0 0)T fur das Modell ohne Reibung stabil, jedoch nicht asymptotisch stabil. Dies andert sich mit
positivem Reibungskoeffizienten b > 0. So wird das Gleichgewicht bzw. die zugehorige Gleich-
gewichtslosung attrahierend und somit asymptotisch stabil. Das Gleichgewicht x⋆1 ist hingegen
instabil.
Die vorgenommene Stabilitatsanalyse beruhte auf Kenntnissen des Phasenportraits. Entsprechend
schwierig durfte es sein, sie auf allgemeine Differentialgleichungen zu ubertragen. Um den folgen-
den Ansatz zu motivieren, betrachten wir erneut das Pendelbeispiel 2.5 und definieren die Energie
E : R2 → R≥0 als Summe der potentiellen und der kinetischen Energie
E(x) =
∫ x1
0a sin(y) dy +
1
2x22 = a(1− cos(x1)) +
1
2x22. (2.6)
2Die Funktionen erfullen jeweils die gleiche DGL und erfullen die gleiche Anfangsbedingung, woraus mit dem
Existenz- und Eindeutigkeitssatz die Behauptung folgt.3Fur autonome Systeme wird die Notation x(·;x0) fur die Losung zum Anfangswert x0 und zur Anfangszeit t0 = 0
verwendet, weil die Wahl letzterer keinen Einfluß auf die Losung hat.

2.2. STABILITAT AUTONOMER SYSTEME 15
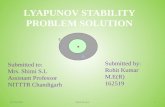
Abbildung 2.2: Hohenlinien x ∈ R2 : E(x) = c der Energiefunktion (2.6) fur das Pendel-
modell ohne Reibung (b = 0) fur c ∈ 0.025, 0.1, 0.5, 1, π, 10, 17.5, 20, 22.5 (links) bzw. c ∈0.1, 1, π, 10, 17.5, 20, 22.5.
Ohne Reibung ist das System konservativ, das heißt es geht keine Energie verloren
E(x(t)) = ∇E(x(t))f(x(t)) = 0
entlang der Losungstrajektorien. Betrachtet man entsprechend Hohenlinien fur niedrige Energie-
niveaus c > 0 — diese konnen von den Losungstrajektorien nicht verlassen werden — erkennt
man ebenfalls die Stabilitat des Systems, siehe Abbildung 2.2. Fugt man den Reibungsterm hinzu
(b > 0), kann man beobachten, dass Energie entlang von Losungen verloren geht (E(x(t)) ≤ 0);
dies ermoglicht ebenfalls den Schluß auf asymptotische Stabilitat, wie wir spater im Detail sehen
werden.
Jedoch ist es nicht immer gunstig, die Energie des Systems zum Stabilitatsnachweis zu verwenden.
Lyapunovs Idee war es, stattdessen andere (allgemeinere) Funktionen V : Rd → R≥0 zu betrachten
und deren zeitliche Ableitung
V (x(t)) = 〈∇V (x(t)), f(x(t))〉 =d∑
i=1
∂V (x(t))
∂xi· fi(x(t))
entlang der Losungen zu studieren. Die Analogie zur Energie und ihren Hohenlinien sollte man im
Hinterkopf behalten, weil sie einem fur die eigene Intuition hilft.
Definition 2.6. [Lyapunov Funktion] Sei V : U → R eine stetige auf einer offenen Menge U ⊆Rd definierte Funktion. Dann wird V als Lyapunov Funktion fur das Gleichgewicht x⋆ ∈ U der
Differentialgleichung (2.4) bezeichnet, wenn V die folgenden Eigenschaften erfullt:
1) V (x⋆) = 0 und V (x) > 0 fur alle x ∈ U\x⋆,
2) V is stetig differenzierbar auf U\x⋆ und erfullt
〈∇V (x), f(x)〉 ≤ 0 ∀ x ∈ U\x⋆. (2.7)

16 KAPITEL 2. LYAPUNOV STABILITAT
Falls sogar 〈∇V (x), f(x)〉 < 0, x ∈ U\x⋆, gilt, spricht man von einer strikten Lyapunov
Funktion.
Lyapunov Funktionen konnen als Stabilitatszertifikat eingesetzt werden.
Satz 2.7. [Lyapunovs direkte Methode] Sei ein Gleichgewicht x⋆ ∈ Rd und eine auf einer Umge-
bung U = U(x⋆) ⊆ Rd des Gleichgewichts definierte Lyapunov Funktion V : U → R gemaß De-
finition 2.6 gegeben. Dann ist die Gleichgewichtslosung x(·;x⋆) ≡ x⋆ stabil. Falls V eine strikte
Lyapunov-Funktion ist, also 〈∇V (x), f(x)〉 < 0 fur alle x ∈ U\x⋆ gilt, ist die Ruhelage x⋆
asymptotisch stabil.
Beweis: Fur den Nachweis der Stabilitat sei ein ε > 0 beliebig, aber fest vorgegeben. Wahle
einen Ball Br(x⋆) mit Radius r ∈ (0, ε], so dass dieser in U enthalten ist. Wegen der Kompakt-
heit der Sphare Sr(x⋆) := x ∈ R
d : ‖x − x⋆‖ = r und x⋆ /∈ Sr(x⋆) existiert das Mini-
mum m := minx∈Sr(x⋆) V (x) > 0. Des Weiteren existiert ein δ ∈ (0, ε) mit der Eigenschaft
V (x) ≤ m/2 fur alle x ∈ Bδ(x⋆). Andernfalls wurde in jedem Ball Bε/k(x
⋆), k ∈ N, ein xk mit
V (xk) ≥ m/2 existieren. Da jedoch die Funktion V (·) stetig ist und die Folge (xk)k∈N fur k → ∞gegen x⋆ konvergiert, musste dann limk→∞ V (xk) = V (x⋆) = 0 gelten, was einem Widerspruch
gleichkame.
Sei x0 ∈ Bδ(x⋆). Dann fallt die Funktion t 7→ V (x(t;x0)) monoton entlang der Losungstrajekto-
rie x(·;x0), weil die Ungleichung
V (x(t;x0)) = ∇V (x(t;x0))f(x(t;x0)) ≤ 0
gemaß der 2. Eigenschaft (2.7) der Lyapunov Funktion V (·) gilt. Zu beachten ist hierbei, dass
V (x(0;x0)) = V (x0) ≤ m/2 < m und folglich V (x(t;x0)) < m fur alle t ≥ 0, t ∈ Ix0 , gilt.
Dies impliziert die Inklusion x(t;x0) ∈ Br(x⋆) ⊆ Bε(x
⋆), siehe auch Abbildung 2.3. Angenom-
men, dies ware nicht der Fall. Dann gabe es eine Zeit T > 0 mit ‖x(T ;x0)−x⋆‖ ≥ r und folglich,
wegen der Stetigkeit der Losung x(·;x0), ein T ⋆ ∈ (0, T ] mit ‖x(T ;x0)− x⋆‖ = r. Fur dieses T ⋆
wurde dann jedoch V (x(T ⋆;x0)) ≥ m gelten — ein Widerspruch. Zudem folgt aus der Inklusi-
on x(t;x0) ∈ Br(x⋆) ⊂ U , dass die Losung x(t;x0) fur alle Zeiten t ≥ 0 existiert, weil sie weder
unbeschrankt wachsen noch den Rand des Definitionsbereichs D erreichen kann. Somit verbleibt
x(·;x0) fur alle positiven Zeiten t ≥ 0 im ε-Ball um das Gleichgewicht x⋆, was die behauptete
Stabilitat zeigt.
Sei V (·) uberdies strikt. Fur beliebiges x0 ∈ Bδ(x⋆) folgt nach Bolzano-Weierstraß wegen der
Kompaktheit von Bε(x⋆) entweder limt→∞ x(t;x0) = x⋆ oder die Existenz einer Folge von Zeiten
(tk)k∈N mit tk+1 > tk, k ∈ N, und limk→∞ tk = ∞, so dass die Folge x(tk;x0) fur k → ∞gegen einen Punkt x ∈ Bε(x
⋆)\x⋆ konvergiert. Damit galte wegen der Stetigkeit von V (·) auch
limk→∞ V (x(tk;x0)) = V (x) =: c > 0. Wegen der Monotonie der Abbildung t 7→ V (x(t;x0)),musste dann V (x(t;x0)) ≥ c fur alle t ≥ 0 gelten. Falls x⋆ nicht asymptotisch stabil ist, existiert
mindestens ein x0 ∈ Bδ(x⋆) mit solch einer Folge. Analog dem ersten Teil dieses Beweises existiert
ein δ ∈ (0, r), so dass V (x) ≤ c/2 fur alle x ∈ Bδ(x⋆) gilt. Dann folgt insbesondere x(t;x0) ∈
Br(x⋆)\Bδ(x
⋆), t ≥ 0. Auf der kompakten Menge Br(x⋆)\Bδ(x
⋆) nimmt die stetige Funktion V (·)ihr Maximum −γ an, fur das −γ < 0 gilt, weil V (·) strikt ist. Somit folgt
V (x(t;x0)) = V (x0) +
∫ t
0V (x(τ ;x0)) dτ ≤ V (x0)− γt,

2.2. STABILITAT AUTONOMER SYSTEME 17
Abbildung 2.3: Darstellung der im Beweis von Satz 2.7 verwendeten Mengen.
ein Widerspruch zu V (x(t;x0)) ≥ c fur hinreichend groß gewahltes t > 0, womit die Attraktitat
und damit die asymptotische Stabilitat folgt.
Vereinfacht konnte man Satz 2.7 wie folgt formulieren: falls es eine bzgl. x⋆ positiv definite Funk-
tion V : U → R gibt, deren Ableitung entlang der Losungstrajektorien negativ semidefinit ist, ist
x⋆ stabil. Falls 〈∇V (·), f(·)〉 : Rd → R uberdies negativ definit ist, impliziert dies sogar asympto-
tische Stabilitat. Lyapunov Funktionen erlauben es einem, (asymptotische) Stabilitat nachzuweisen
ohne die Losungen einer Differentialgleichung x(t) = f(x(t)) zu kennen. Es besteht jedoch die
Schwierigkeit einen geeigneten Lyapunov Kandidaten zu finden, falls man nicht wie in elektrischen
oder mechanischen Systemen die Energie verwenden kann. Dazu betrachten wir einige Beispiele.
Beispiel 2.8. Betrachte die Differentialgleichung x(t) = −g(x(t)) mit g : (−a, a) → R, also (2.4)
mit f(x) = −g(x), D = (−a, a) und d = 1. Sei das Vektorfeld g zudem lokal Lipschitz und
erfulle
g(0) = 0 sowie xg(x) > 0 ∀ x ∈ D\0.Um asymptotische Stabilitat des isolierten Gleichgewichts x⋆ = 0 nachzuweisen, wird die Funk-
tion V : (−a, a) → R mittels x 7→∫ x0 g(y) dy definiert, die positiv definit und auf dem Defini-
tionsbereich D stetig differenzierbar ist. Die Rechnung
V (x) =∂V
∂xx = −g2(x) < 0 ∀ x ∈ D\0
zeigt, dass V eine strikte Lyapunov Funktion ist und somit verwendet werden kann, um asymptoti-
sche Stabilitat nachzuweisen – obwohl die Linearisierung des Systems, zum Beispiel fur g(x) = x3
keine Information uber das Stabilitatsverhalten enthalt.
Die Wahl der Lyapunov Fuktion ist nicht eindeutig. So hatte in diesem Beispiel auch V (x) = 12x
2
verwendet werden konnen. Aber wie sieht es mit dem Pendelbeispiel 2.5 aus? Kann die Energie
des Systems als Lyapunov Funktion dienen? Dazu berechnen wir die Ableitung V (·) der Funktion
V (x) = a(1− cosx1) +12x
22:
V (x) =∂V
∂xf(x) = (a sin(x1) x2)
(
x2−a sin(x1)− bx2
)
= −bx22. (2.8)

18 KAPITEL 2. LYAPUNOV STABILITAT
−3 −2 −1 0 1 2 3
−6
−4
−2
0
2
4
6
x1
x2
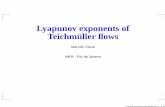
Abbildung 2.4: Darstellung der Losungstrajektorien fur das Pendelmodell aus Beispiel 2.5 mit
a = g = 9.81 und b = 1.
V (·) ist also keine strikte Lyapunov Funktion, da V (x) = 0 fur alle x ∈ R2 mit x2 = 0 gilt.
Dennoch kann man asymptotische Stabilitat beobachten, siehe Abbildung 2.4.
Eine Lyapunov Funktion ist also nur hinreichend fur den Nachweis der (asymptotischen) Stabi-
litat, bzgl. der Notwendigkeit sei auf spatere Ausfuhrungen fur lineare (autonome) Systeme und [9,
Section 4.7] verwiesen. Jedoch werden wir im nachsten Abschnitt ein Hilfsmittel kennenlernen,
dass es uns erlaubt die eben betrachtete Energiefunktion fur den Stabilitatsnachweis zu verwen-
den. Alternativ kann folgende unter dem Schlagwort variable gradient method bekannte Methode
eingesetzt werden, die in den Ubungen auf ein Beispielsystem angewendet werden soll, das unter
anderem das Pendel mit Reibung einschließt. Setzt man g(x) := ∇V (x)⊤, dann gilt
V (x(t)) =∂V (x(t))
∂x· f(x(t)) = g(x(t))⊤f(x(t)).
Damit das Vektorfeld g der Gradient eines Skalarfelds (Abbildung vom Rd → R) sein kann, muss
∂gi∂xj
=∂gj∂xi
∀ i, j ∈ 1, 2, . . . , n
gelten.4 Jetzt kann man erste Parameter der Funktion wahlen, um sicherzustellen, dass 〈∇V (·), f(·)〉negativ definit ist. Anschließend wird V als das vektorielles Kurvenintegral berechnet. Bezeichne
diesbzgl. γ : [0,∑d
i=1 |xi|] → Rd, t 7→ (x1, x2, . . . , xj−1, sgn(xj) · (t −
∑j−1i=1 |xi|), 0, . . . , 0)⊤
fur t ∈ [∑j−1
i=1 |xi|,∑j
i=1 |xi|) eine Parametrisierung eine Kurve mit Anfangspunkt 0 ∈ Rd und
Endpunkt x. Dann gilt
V (x) =
∫
γg · ds =
∫
∑di=1 |xi|
0〈g(γ(t)), γ(t)〉 dt
=
∫ x1
0g1(t, 0, ..., 0) dt+
∫ x2
0g2(x1, t, 0, ..., 0) dt+ . . .+
∫ xd
0gd(x1, ..., xd−1, t) dt.
Im Anschluß sind die verbliebenen Parameter der Funktion g so zu wahlen, dass V positiv definit
ist.
4g ist dann ein Potentialfeld und das Kurvenintegral wegunabhangig, siehe [1, Abschnitt 27.3].

2.2. STABILITAT AUTONOMER SYSTEME 19
Abbildung 2.5: Hohenlinien (Niveaumengen) der Funktion (2.10).
Ein weiteres wichtiges Einsatzgebiet von Lyapunov Funktionen ist es, Einzugsbereiche abzuschatzen,
also die Menge aller Startwerte x0, so dass die Losung x(·;x0) fur alle Zeiten existiert und gegen
das Gleichgewicht x⋆ konvergiert. Wahrend die Beantwortung dieser Frage oft sehr diffiziel ist,
wollen wir in diesem Abschnitt Bedingungen angeben, unter denen der Einzugsbereich dem ge-
samten Raum Rd entspricht. Das Gleichgewicht wird in diesem Fall als global asymptotisch stabil
(GAS) bezeichnet. Betrachtet man dazu nochmals den Beweis von Satz 2.7 ist entscheidend, dass
jeder Punkt x ∈ Rd im Innern einer beschrankter Niveaumenge Ωc := x ∈ R
d : V (x) ≤ c liegt.
Satz 2.9. [Theorem von Barbashin–Krasovskii]
Sei x⋆ ein Gleichgewicht der Differentialgleichung (2.4) und sei V : Rd → R eine strikte Lyapunov
Funktion im Sinne von Definition 2.6. Des Weiteren sei V radial unbeschrankt, das heißt
‖x‖ → ∞ =⇒ V (x) → ∞. (2.9)
Dann ist x⋆ global asymptotisch stabil.
Beweis: Sei x0 ∈ Rd beliebig gewahlt und definiere c := V (x0). Bedingung (2.9) impliziert die
Existenz eines Parameters r ∈ [0,∞), so dass V (x) > c fur alle x ∈ Rd mit ‖x‖ > r und damit
die Inklusion Ωc ⊆ Br(x⋆) fur die Niveaumenge Ωc := x ∈ R
d : V (x) ≤ c. Dies zeigt die
Beschranktheit von Ωc. Der Rest des Beweises verlauft analog zu dem von Satz 2.7.
Die zusatzliche Forderung der radialen Unbeschranktheit ist eine hinreichende Bedingung, um
sicherzustellen, dass Niveaumengen Ωc fur alle c > 0 beschrankt sind. So zeigt zum Beispiel die
Funktion
V (x) =x21
1 + x21+ x22, (2.10)
dass (Sub-) Niveaumengen Ωc := x ∈ Rd : V (x) ≤ c nur fur kleine Parameterwerte c be-
schrankt sein mussen, siehe Abbildung 2.5. Zu beachten ist, dass globale asymptotische Stabilitat
die Existenz mehrerer Equilibria ausschließt; das Pendel kann also nicht GAS sein.
Abschließend wird in diesem Abschnitt ein Resultat bewiesen, dass es ermoglicht Instabilitat einer
Gleichgewichtslosung zu zeigen.
Satz 2.10. [Chetaevs Theorem]
Sei x⋆ ein Gleichgewicht der Differentialgleichung (2.4) und r so gewahlt, dass Br(x⋆) ⊂ D gilt.
Sei zudem V : D → R eine stetig differenzierbare Funktion mit V (0) = 0 und der Eigenschaft,

20 KAPITEL 2. LYAPUNOV STABILITAT
dass in jeder offenen Umgebung des Gleichgewichts x⋆ ein x0 ∈ D existiert, fur das V (x0) > 0gilt. Dann ist x⋆ instabil, falls 〈∇V (x), f(x)〉 > 0 fur alle x ∈ Ω := x ∈ Br(x
⋆) : V (x) > 0.
Beweis: Ω ist eine nicht leere Menge, deren Rand in der Menge x ∈ D : V (x) = 0 ∪ Sr(x⋆)
enthalten ist.5 Sei ε ∈ (0, r) beliebig gewahlt. Dann existiert fur jedes δ ∈ (0, ε] ein Punkt x0 ∈Ω∩Bδ(x
⋆) mit V (x0) =: c > 0. Wir zeigen zuerst, dass die Losung x(·;x0) die Menge Ω verlaßt.
Da V (x(t)) > 0 fur alle x ∈ Ω gilt, folgt V (x(t;x0)) ≥ c, t ≥ 0. Da eine stetige Funktion auf
einer kompakten Menge ihre Extrema annimmt, existiert γ = minx∈Ω:V (x)≥c V (x(t)) > 0. Dies
impliziert die Ungleichung
V (x(t)) = V (x0) +
∫ t
0V (x(s)) ds ≥ c+
∫ t
0γ ds = c+ γt.
Da V (x) auf Ω beschrankt ist, muss x(·;x0) die Menge Ω verlassen. Berucksichtigt man des Wei-
teren, dass V (x(t;x0)) ≥ c, t ≥ 0, ist, muss die Losung Ω durch die Sphare Sr(x⋆) verlassen, was
die Instabilitat des Gleichgewichts x⋆ zeigt.
2.3 Das Invarianzprinzip
Im letzten Abschnitt haben wir Lyapunov Funktionen V als Stabilitatszertifikate kennengelernt.
Dazu war es notig, dass 〈∇V (·), f(·)〉 : Rd → R negativ definit bzgl. des Gleichgewichts x⋆ ist
– eine Voraussetzung, die fur das Pendelbeispiel 2.5 mit der Energiefunktion
V (x) = a(1− cos(x1)) +1
2x22
nicht erfullt ist, da 〈∇V (x), f(x)〉 = −bx22 gilt, siehe (2.8). Allerdings ist aus physikalischer
Sicht klar, dass Energie verloren geht, solange sich das System nicht in einer Ruhelage befindet.
Betrachtet man dazu die Menge x ∈ (−π, π) × R : V (x) = 0 = x ∈ (−π, π) × R :x2 = 0 fallt auf, dass gemaß der Systemdynamik x1 = x2, x2 = −a sin(x1) − bx2, siehe (2.5),
keine Trajektorie in dieser Menge bleiben kann, wenn x1 6= kπ, k ∈ Z gilt (also außerhalb des
Gleichgewichts x⋆ = (0 0)T ).6 In diesem Abschnitt werden die Resultate aus Abschnitt 2.2 so
erweitert, dass diese Beobachtung ausgenutzt werden kann und es somit gelingt, die Energie als
Lyapunov Funktion fur das Pendelbeispiel zu verwenden. Die dazu benotigte zentrale Aussage
heißt LaSalles Invarianzprinzip. Um dieses zu formulieren, werden ein paar Definitionen benotigt.
Definition 2.11. [Invariante Mengen] Eine Menge M ⊆ D heißt vorwarts (positiv) invariant genau
dann, wenn fur jedes x0 ∈ M die Losung x(t;x0) der DGL (2.4) fur alle positiven Zeiten t ≥ 0existiert und in M enthalten ist. Gilt diese Aussage fur alle negativen Zeiten t ≤ 0 spricht man von
einer ruckwarts (negativ) invarianten Menge. Ist eine Menge sowohl ruckwarts als auch vorwarts
invariant, so heißt sie invariant bzgl. der DGL (2.4).
Invariante Mengen hatten wir bereits in Abschnitt 2.2 gesehen, so sind Niveaumengen von Lyapu-
novfunktionen vorwarts invariant — vorausgesetzt die Existenz der Losung war gesichert. Dies
hatten wir sichergestellt fur kompakte Niveaumengen. Ein weiteres wichtiges Konzept sind so ge-
nannte ω-Limesmengen, siehe [11, Seite 148].
5Insbesondere liegt das Gleichgewicht x⋆ am Rand der Menge Ω.6Die Menge ist so gewahlt, dass sie kein weiteres Gleichgewicht enthalt; jedoch ist sie nicht (vorwarts) invariant.
Dazu musste sie weiter eingeschrankt werden.

2.3. DAS INVARIANZPRINZIP 21
Definition 2.12. [ω-Limesmenge] Ein Punkt y ∈ Rd heißt ω-Limespunkt von x0 bzgl. der Diffe-
rentialgleichung (2.4), falls es eine Folge von Zeiten (tk)k∈N mit tk → ∞ fur k → ∞ gibt, so dass
limk→∞ ‖x(tk;x0) − y‖ = 0 gilt. Die Menge aller ω-Limespunkte von x0 bzgl. der DGL (2.4)
wird mit Lω = Lω(x0) bzw. Lω(x0; f) bezeichnet und ω-Limesmenge genannt.
Die Definitionen 2.11 und 2.12 erlauben es uns, folgende Proposition zu formulieren.
Proposition 2.13. Sei x(·;x0) eine beschrankte Losung der DGL (2.4) zum Anfangswert x0, die
fur alle positiven Zeiten t ≥ 0 existiert. Dann ist die ω-Limesmenge Lω nichtleer, kompakt und
invariant. Des Weiteren strebt die Losung x(t;x0) fur t → ∞ gegen Lω, das heißt es gibt fur jedes
ε > 0 ein T > 0 mit der Eigenschaft
dist(x(t;x0), Lω) := infy∈Lω
‖x(t;x0)− y‖ < ε ∀ t > T.
Beweis: Das Lω nichtleer und beschrankt ist, sei dem Leser als Ubungsaufgabe uberlassen. Wir
zeigen, dass Lω abgeschlossen ist, indem wir zeigen, dass fur jede konvergente Folge (yi)i∈N ⊂ Lω
mit yi → y fur i → ∞ der Grenzwert y ebenfalls in Lω enthalten ist. Fur jedes Folgeglied yiexistiert eine Folge von Zeiten (tij )j∈N, so dass tij → ∞ und x(tij ;x0) → yi fur j → ∞ gelten.
Konstruiere nun eine Folge von Zeiten (τi)i∈N, so dass die Bedingungen
τi ≥ t1i und ‖x(τi;x0)− yi‖ ≤ 1
i
fur alle i ∈ N gelten. Dann gibt es fur vorgegebenes ε > 0 Zahlen N1 und N2 ∈ N, so dass die
Ungleichungen ‖x(τi;x0) − yi‖ ≤ ε/2, i ≥ N1, und ‖yi − y‖ ≤ ε/2, i ≥ N2, gelten. Damit
erhalten wir ‖x(τi) − y‖ ≤ ε fur alle i ≥ maxN1, N2 und damit die Konvergenz x(τi) → yfur i → ∞ (τi ≥ t1i und t1i → ∞ implizieren zudem τi → ∞), also die Abgeschlossenheit der
Menge Lω. Der Rest des Beweises sei wiederum dem Leser uberlassen.
Aufbauend auf dieser Proposition kann der folgende Satz bewiesen werden.
Satz 2.14. [LaSalles Invarianzprinzip]
Sei Ω ⊂ D eine kompakte bzgl. der DGL (2.4) vorwartsinvariante Menge und sei V : D → R eine
stetig differenzierbare Funktion, deren Ableitung V (x) ≤ 0 fur alle x ∈ Ω erfullt. Zudem sei E :=x ∈ Ω : V (x) = 0 und M die großte invariante Menge in E. Dann strebt jede Losung x(·;x0)mit Anfangswert x0 ∈ Ω gegen M , das heißt es gilt limt→∞ dist(x(t;x0),M) = 0.
Beweis: Sei x0 ∈ Ω beliebig aber fest gewahlt. Dann ist V (x(t;x0)) wegen der Vorwartsinvarianz
der Menge Ω und V (x) ≤ 0, x ∈ Ω, eine monoton fallende Funktion. Da V zudem stetig auf der
kompakten Menge Ω ist, existiert ein Grenzwert a ∈ R mit limt→∞ V (x(t;x0)) = a.
Des Weiteren gilt Lω ⊆ Ω, da Ω abgeschlossen ist. Sei y ein beliebiger Punkt aus Lω. Dann gibt
es eine Folge (ti)i∈N von Zeiten mit limi→∞ ti = ∞ und limi→∞ x(ti;x0) = y und wegen der
Stetigkeit von V gilt zudem V (y) = limi→∞ V (x(ti;x0)) = a. Folglich gilt V (y) = a fur alle
y ∈ Lω. Dies impliziert wegen der Invarianz von Lω (Proposition 2.13), dass 〈∇V (y), f(y)〉 = 0fur alle y ∈ Lω gilt. Damit erhalten wir die Inklusionskette Lω ⊆ M ⊆ E ⊆ Ω. Zusatzlich
folgt aus der Beschranktheit von x(·;x0) mittels Proposition 2.13 noch, dass x(t;x0) gegen Lω fur
t → ∞ strebt.

22 KAPITEL 2. LYAPUNOV STABILITAT
Falls Ωc := x ∈ Rd : V (x) ≤ c beschrankt ist and V (x) ≤ 0 fur alle x ∈ Ωc gilt, ist Ωc
eine kompakte vorwartsinvariante Menge und erfullt somit die Voraussetzungen von Satz 2.14.
Dies kann man beispielsweise fur eine positiv definite Funktion V und hinreichend kleines c > 0gewahrleisten. Alternativ konnte man radiale Unbeschranktheit der Funktion V voraussetzen, um
die Beschranktheit von Ωc zu folgern — unabhangig davon, ob V positiv (semi-)definit ist oder
nicht.
Um mit Hilfe von Satz 2.14 asymptotische Stabilitat eines Gleichgewichts x⋆ zu folgern, muss man
zeigen, dass keine weiteren Trajektorien in der Menge E enthalten sein konnen. Die folgenden
beiden Korollare sind Erweiterungen der Satze 2.7 und 2.9.
Korollar 2.15. Sei x⋆ ein Gleichgewicht der DGL (2.4) und V : D → R eine stetig differenzier-
bare positiv definite Funktion auf dem Definitionsgebiet D, so dass x⋆ ∈ D und V (x) ≤ 0 fur
alle x ∈ D gelten. Sei E := x ∈ D : V (x) = 0 und keine Losung abgesehen von der trivia-
len x(t;x⋆) ≡ x⋆ kann fur alle Zeiten t ≥ 0 in der Menge E bleiben (fur alle x0 ∈ E existiert ein
t > 0, so dass x(t;x0) /∈ E). Dann ist das Gleichgewicht x⋆ (lokal) asymptotisch stabil.
Korollar 2.16. Sei x⋆ ein Gleichgewicht der DGL (2.4) und V : Rd → R eine stetig differenzier-
bare positiv definite und radial unbeschrankte Funktion, so dass V (x) ≤ 0 fur alle x ∈ Rd gilt.
Sei E := x ∈ Rd : V (x) = 0 und keine Losung abgesehen von der trivialen x(t; 0) ≡ x⋆ kann
fur alle Zeiten t ≥ 0 in der Menge E bleiben. Dann ist das Gleichgewicht x⋆ global asymptotisch
stabil.
Falls 〈∇V (·), f(·)〉 : Rd → R negativ definit ist und zudem E = x⋆ gilt, entsprechen diese
Korollare genau den zuvor erwahnten Satzen. Zum Abschluß dieses Abschnitts betrachten wir ein
verallgemeinertes Pendel mit Reibung.
Beispiel 2.17. Sei eine Differentialgleichung (2.4) gegeben durch
x1 = x2
x2 = −h1(x1)− h2(x2),
so dass hi, i ∈ 1, 2, lokal Lipschitz sind und die Bedingungen hi(0) = 0 sowie yhi(y) > 0fur alle y ∈ (−a, a)\0 erfullen.7 In Analogie zum Pendelbeispiel wahlen wir den bzgl. des
Gleichgewichts x⋆ = 0 positiv semidefiniten Kandidaten V : (−a, a)2 → R≥0,
V (x) =
∫ x1
0h1(y) dy +
1
2x22.
Wegen 〈∇V (x), f(x)〉 = h1(x1)x2+x2[−h1(x1)−h2(x2)] = −x2h2(x2) ≤ 0 ist dieser Ausdruck
negativ semidefinit. Zudem gilt wegen der Implikationskette
x2(t) ≡ 0 =⇒ x2(t) ≡ 0 =⇒ h1(x1(t)) ≡ 0 =⇒ x1(t) ≡ 0,
dass nur die triviale Losung x(t;x0) ≡ 0 in E = x ∈ D : V (x) = 0 = x ∈ D : x2 = 0verbleiben kann. Folglich liefert Korollar 2.15 asymptotische Stabilitat bzgl. x⋆.
7In Beispiel 2.5 sind h1(x1) = a sin(x1) und h2(x2) = bx2. Die Umgebung (−a, a) entspricht folglich (−π, π).

2.4. LINEARISIERUNG UND LINEARE SYSTEME 23
2.4 Linearisierung und lineare Systeme
In diesem Abschnitt betrachten wir die lineare zeitinvariante Differentialgleichung
x(t) = Ax(t). (2.11)
Fur diese Differentialgleichung ist x⋆ = 0 immer ein Gleichgewicht. Falls uberdies det(A) 6= 0gilt, handelt es sich um das einzige Gleichgewicht; weitere isolierte Gleichgewichte konnen wegen
der Linearitat der Gleichung nicht auftreten. Falls namlich det(A) = 0 gelten sollte, die Matrix Aalso einen Kern (und damit einen Unterraum) der Dimension n ∈ N besitzt, sind dessen Elemente
alles Gleichgewichte von (2.11) — diese sind allerdings alle zusammenhangend.
Fur die Stabilitatsanalyse linearer Systeme zeigt man zuerst, dass deren Stabilitatsverhalten invari-
ant unter Koordinatentransformationen ist [6, Lemma 8.5] und charakterisiert es dann im Anschluß
anhand der Eigenwerte bzw. der Jordanform der Matrix A.
Satz 2.18. [6, Satz 8.6] Betrachte die lineare Differentialgleichung (2.11) mit einer Matrix A ∈Rd×d und Gleichgewicht x⋆ = 0. Seien λ1, λ2, . . . , λd ∈ C die Eigenwerte der Matrix A. Dann
gilt:
(i) x⋆ ist stabil genau dann, wenn alle Eigenwerte λi = ai + ℑbi, i ∈ 1, 2, . . . , d, negativen
Realteil besitzen (ai ≤ 0) und alle Eigenwerte λi mit Realteil ai = 0 halbeinfach sind.8
(ii) x⋆ ist (lokal) asymptotisch stabil genau dann, wenn alle Eigenwerte λi = ai + ℑbi, i ∈1, 2, . . . , d, negativen Realteil ai < 0 haben.
Wir wollen Aussage (i) aus Satz 2.18 veranschaulichen und aus physikalischer Sicht motivie-
ren. Dazu betrachten wir [9, Example 4.12], das aufzeigt, warum Jordanblocke zu einem Eigen-
wert λi = ai + ℑbi mit ai = 0 halbeinfach sein mussen, also nicht die Struktur
λi 1 0 · · · · · · 0
0 λi 1. . .
......
. . .. . .
. . .. . .
......
. . .. . . 1 0
.... . . λi 1
0 · · · · · · · · · 0 λi
(2.12)
aufweisen durfen. Dazu werden zwei identische Systeme der Form
x =
(
0 1−1 0
)
x+
(
01
)
u
mit x ∈ R2, u ∈ R in Reihe bzw. parallel geschaltet, siehe Abbildung 2.6.
8Halbeinfach bedeutet, dass die zugehorigen Blocke in der Jordanform eindimensional sind. Alternativ konnte man
auch fordern, dass Eigenwerte mit Realteil ai = 0 und algebraischer Vielfachheit qi ≥ 2 die Bedingung Rang(A −
λiId) = d− qi erfullen, siehe [9, Theorem 4.5].

24 KAPITEL 2. LYAPUNOV STABILITAT
Abbildung 2.6: Links: Reihenschaltung; rechts: Parallelschaltung.
Es ergeben sich die Matrizen
Ap =
0 1 0 0−1 0 0 00 0 0 10 0 −1 0
und As =
0 1 0 0−1 0 0 00 0 0 11 0 −1 0
mit den Eigenwerten λ1/2 = ℑ und λ3/4 = −ℑ; jeweils algebraische Vielfachheit 2. Jedoch ist nur
fur die Parallelschaltung das Kriterium aus Satz 2.18(i), Einfachheit der Eigenwerte λi = ai +ℑbimit ai = 0, erfullt; diese ist also im Gegensatz zur Reihenschaltung stabil. Anfangsbedingungen
ungleich Null liefern sinusformige Schwingungen als Anregung des Systems (beschrankt im Zeit-
verlauf). In der Parallelschaltung werden diese lediglich addiert, in der Reihenschaltung dient die
Anregung des einen Systems als Eingang fur das andere System und kann Resonanz und somit
unbeschranktes Wachstum verursachen.
Bemerkung 2.19. (i) Aus Satz 2.18 folgt auch, dass x⋆ = 0 genau dann instabil ist, falls ein
Eigenwert mit echt positivem Realteil bzw. ein Eigenwert λi = ai +ℑbi mit Realteil ai = 0und einem zugehorigem Jordanblock der Form (2.12) mit Dimension echt großer als eins
existiert.
(ii) Tatsachlich ist fur die lineare Differentialgleichung (2.11) lokale asymptotische Stabilitat
gleichbedeutend mit globaler exponentieller Stabilitat, das heißt es gibt Konstanten C ≥ 1,
σ > 0, so dass die Ungleichung
‖x(t;x0)− x⋆‖ ≤ Ce−σt‖x0 − x⋆‖ ∀ t ≥ 0, x0 ∈ Rd
gilt, siehe [6, Definition 8.1(iv) und Satz 8.7]. Man kann sogar noch die folgende, ebenfalls
aquivalente Bedingung zeigen: es existiert eine Norm ‖ · ‖a auf dem Rd und eine reelle Zahl
σ > 0, so dass fur alle (t, x0) ∈ R≥0 × Rd die Ungleichung
‖x(t;x0)− x⋆‖a = ‖etAx0‖a ≤ e−σt‖x0‖a = e−σt‖x0 − x⋆‖
gilt, siehe [3, Theorem 2.61]. Eine zu einem asymptotisch stabilen System zugehorige Matrix
wird Hurwitz genannt.
In Satz 2.7 haben wir fur nichtlineare autonome Systeme gesehen, dass die Existenz einer Lyapunov
Funktion asymptotische Stabilitat impliziert. Fur lineare Systeme wollen wir zeigen, dass dieser
Schluß ebenfalls fur die andere Implikationsrichtung seine Gultigkeit behalt, das heißt wir folgern

2.4. LINEARISIERUNG UND LINEARE SYSTEME 25
aus asymptotischer Stabilitat (A Hurwitz) die Existenz einer (quadratischen) Lyapunov Funktion
— und das sogar konstruktiv! Dazu betrachten wir den Lyapunov Kandidaten V : Rd → R,
V (x) = xTPx (2.13)
mit positiv definiter symmetrischer Matrix P . Fur deren AbleitungdV (x(t))
dt entlang von Losungen
der linearen autonomen Differentialgleichung (2.11) gilt
〈∇V (x), f(x)〉 = xTPAx+ (Ax)TPx = xT (PA+ATP )x.
Falls nun die Lyapunov Gleichung
PA+ATP = −Q (2.14)
fur eine positiv definite symmetrische Matrix Q eine Losung besitzt, ware V eine Lyapunov Funk-
tion.9
Satz 2.20. Eine Matrix A ist Hurwitz genau dann, wenn die Lyapunov Gleichung (2.14) fur jede
positiv definite symmetrische Matrix Q eine positiv definite symmetrische Losung P besitzt. Falls
A Hurwitz ist, so ist uberdies die Losung von (2.14) eindeutig.
Beweis: Die Existenz einer Losung von (2.14) ist gemaß Satz 2.7 hinreichend fur asymptotische
Stabilitat und impliziert damit nach Satz 2.18 auch, dass A Hurwitz ist.
Fur die Ruckrichtung nehmen wir an, dass A Hurwitz ist und betrachten die Matrix P definiert
durch die Gleichung
P =
∫ ∞
0eA
T tQeAt dt.
Da der Integrand eine Summe von Termen der Form tk−1eλit mit ℜλi < 0 ist, ist P wohldefiniert.
Des Weiteren ist P symmetrisch und positiv definit. Letzteres wird durch einen Widerspruchsbe-
weis gezeigt. Angenommen es existiert ein x ∈ Rd\0 mit xTPx = 0. Dann gilt
∫ ∞
0xT eA
T tQeAtx dt = 0.
Folglich muss eAtx = 0 fur alle t ≥ 0, was wiederum x = 0 impliziert. Setzt man nun P in die
Lyapunov Gleichung (2.14) ein, erhalt man
∫ ∞
0eA
T tQeAtA dt+
∫ ∞
0AT eA
T tQeAt dt =
∫ ∞
0
d
dt
(
eAT tQeAt
)
dt = eAT tQeAt
∣
∣
∣
∞
0= −Q.
Also lost P Gleichung (2.14). Um die Eindeutigkeit zu zeigen, nehme man an, dass eine weitere
Losung P , P 6= P , von (2.14) existiere. Dann gilt (P − P )A+AT (P − P ) = 0 und damit auch
0 = eAT t[
(P − P )A+AT (P − P )]
eAt =d
dt
(
eAT t(P − P )eAt
)
.
Es muss also eAT t(P − P )eAt konstant bzgl. t sein. Jedoch konvergiert der Ausdruck eA
T t(P −P )eAt fur t → ∞ gegen die Nullmatrix, da A Hurwitz ist. Dies steht aber im Widerspruch zu
9Die Aussage bleibt gultig, falls Q positiv semidefinit mit Q = CTC ist und das Paar (A,C) mit C ∈ Rp×d
beobachtbar ist [5, Definition 4.2], also die Beobachbarkeitsmatrix (CT , ATCT , . . . , (AT )d−1CT ) ∈ Rd×(pd) vollen
Rang hat [5, Definition 4.8 und Korollar 4.9], siehe [9, Exercise 4.22].

26 KAPITEL 2. LYAPUNOV STABILITAT
zeitlichen Invarianz (Losung konstant) wegen eA0 = Id (zum Zeitpunkt t = 0 ist die Losung
gleich P − P 6= 0).
Insbesondere kann man mittels (2.14) eine Lyapunov Funktion konstruieren. Zudem erlaubt die
Existenz einer Lyapunov Funktion Aussagen uber das System unter Storungen bzw. lokale Aussa-
gen uber nichtlineare Systeme mittles ihrer Linearisierung wie der nachste Satz zeigt.
Satz 2.21. Sei x⋆ = 0 ein Gleichgewicht der (nichtlinearen) autonomen Differentialgleichung
x(t) = f(x(t)) mit stetig differenzierbarem Vektorfeld f : D → Rd, 0 ∈ D und D ⊆ R
d offen,
und definiere A = ∂f∂x (x)
∣
∣
∣
x=0. Dann ist der Ursprung asymptotisch stabil, falls ai < 0 fur alle
Eigenwerte λi = ai +ℑbi, i = 1, 2, . . . , d, von A gilt. Des Weiteren ist der Ursprung instabil, falls
ein Index i ∈ 1, 2, . . . , d mit ai > 0 existiert.
Beweisidee: das Vektorfeld f ∈ C1(D,Rd) der Differentialgleichung (2.4) kann als f(x) = Ax+g(x) geschrieben werden, wobei
gi(x) =
[
∂fi∂x
(zi)−∂fi∂x
(0)
]
x
gilt und zi auf der Verbindungsstrecke von x und dem Ursprung liegt. Hierbeit gilt ‖g(x)‖/‖x‖ →0 fur ‖x‖ → 0. Es existiert also fur beliebiges γ > 0 ein r > 0, so dass ‖g(x)‖ < γ‖x‖ fur alle
x ∈ Br(0) gilt. Betrachtet man nun die aus Satz 2.20 erhaltene Matrix P fur die Hurwitz-Matrix Aliefert das
V (x(t)) = x(t)TPx(t) + x(t)TPx(t)
= x(t)TP [Ax(t) + g(x(t))] + [x(t)TAT + gT (x(t))]Px(t)
= x(t)T (PA+ATP )x(t) + 2x(t)TPg(x(t))
= −x(t)TQx(t) + 2x(t)TPg(x(t)).
Der erste Term −x(t)TQx(t) ist negativ definit und kann mittels x(t)TQx(t) ≥ λmin(Q)‖x(t)‖2nach oben abgeschatzt werden, wobei λmin(Q) > 0 der kleinste Eigenwert von Q ist. Wahlt man
nun γ < (1/2)λmin(Q)/‖P‖ erhalt man, dass 〈∇V (·), f(·)〉 negativ definit ist. Dies erlaubt es, auf
lokale asymptotische Stabilitat mittels Satz 2.7 zu schließen. Der Beweis des zweiten Teils funk-
tioniert ahnlich mit Satz 2.10, wobei Eigenwerte auf der imaginaren Achse zusatzliche technische
Schwierigkeiten verursachen. Fur Details sei auf [9, Theorem 4.7] verwiesen.
Der Satz laßt sich analog fur beliebige Gleichgewichte x⋆ 6= 0 formulieren, siehe zum Beispiel [6,
Satz 9.8]. Zur Veranschaulichung von Satz 2.21 betrachten wir abermals das Pendelbeispiel.
Beispiel 2.22. Die Pendelgleichung ist gegeben durch
x1(t) = x2(t)
x2(t) = −a sin(x1(t))− bx2(t)
mit den Gleichgewichten x⋆ = (0 0)T und x⋆⋆ = (π 0)T . Um nun das Stabilitatsverhalten dieses
Systems in der Nahe dieser Gleichgewichte zu untersuchen, berechnen wir die Jacobi-Matrix
∂f(x)
∂x=
(
∂f1∂x1
∂f1∂x2
∂f2∂x1
∂f2∂x2
)
(x) =
(
0 1−a cos(x1) −b
)

2.4. LINEARISIERUNG UND LINEARE SYSTEME 27
Ausgewertet an x⋆ liefert dies die Eigenwerte λ⋆1/2 = −b/2± 1
2
√b2 − 4a. Folglich liefert Satz 2.18
(lokale) asymptotische Stabilitat bzgl. x⋆ — vorausgesetzt der Reibungskoeffizient b ist echt großer
als Null. Andernfalls liefert der Satz keine Aussage.
Fur x⋆⋆ liefert die Auswertung der Jacobi-Matrix A = ∂f(x)∂x
∣
∣
∣
x=x⋆⋆(alternativ verschiebe man
das Gleichgewicht in den Ursprung) die Eigenwerte λ⋆⋆1/2 = −b/2± 1
2
√b2 + 4a und damit gemaß
Satz 2.21 Instabilitat.

28 KAPITEL 2. LYAPUNOV STABILITAT