Non mare silicic volcanism on the lunar farside at compton–belkovich
2005 September 222005 International Lunar Conference
Toronto, Ontario1 2005 September 222005 International Lunar Conference
Toronto, Ontario1
Lunette: An Affordable Canadian Lunar Farside Gravity Mapping Mission
Kieran A. Carroll, Gedex Inc.Henry Spencer, SPSystems
Jafar Arkani-Hamed, University of TorontoRobert E. Zee, UTIAS Space Flight Laboratory

2005 September 222005 International Lunar Conference
Toronto, Ontario2
Lunar Gravity Mapping Team
• Jafar Arkani-Hamed:– Lunette science team PI, University of Toronto Physics Dept
– Geophysicist/planetologist, Lunar morphology researcher, mascon specialist
• Gedex:– Geophysics exploration systems engineering company
– Developing a new-technology airborne gravity gradiometer for terrestrial mineral, oil and gas exploration
• UTIAS Space Flight Lab:– Bus contractor for MOST and NEOSSat
– Canadian pioneer in nanosat development: CanX-1 launched, CanX-2 nearly complete, CanX-3/4/5 in development
• Henry Spencer, SPSystems:– Software architect for MOST, NEOSSat microsats
– Mission architect for CRAFTI and PARTI small-body microsat-class missions

2005 September 222005 International Lunar Conference
Toronto, Ontario3
Overview:Gravity Mapping for Lunar Exploration
• A valuable terrestrial geophysics exploration tool
• Has been pursued previously for Lunar exploration
• What’s new? – Lunar exploration is happening again!
– Technology advances enable higher resolution, lower mass/cost for Lunar gravity data collection:
• Practical terrestrial mobile gravity gradiometer instruments
• Microsat/nanosat technology

2005 September 222005 International Lunar Conference
Toronto, Ontario4
Use of Gravity in Exploration
• Used by geophysicists to help understand what lies below the surface, e.g., mineral deposits, oil/gas bearing strata
• Deposits with density different from surrounding material produce anomalous gravity signature
• Example: a multi-billion-dollar diamond-bearing kimberlite pipe can be completely hidden by a few meters of over-burden, but easily detected with a suitable gravity instrument
• Optical instruments see only the surface; gamma-ray spectrometers and radar can see some depth below, but are attenuated by surface material
• Advantage: Nothing blocks gravity!
• (Disadvantage: Nothing blocks gravity…)
• Lunar application: “lumpy” sub-surface ice deposits, buried NiFemeteorites…

2005 September 222005 International Lunar Conference
Toronto, Ontario5
Gravity of a Uniform Sphere
GMm/r2

2005 September 222005 International Lunar Conference
Toronto, Ontario6
Gravity Anomalies

2005 September 222005 International Lunar Conference
Toronto, Ontario7
Ground-Based Gravimetry
Good accuracy, but slow and expensive to collect!

2005 September 222005 International Lunar Conference
Toronto, Ontario8
Airborne Gravimetry
• 1 km deep spherical deposit• 1x1011 kg (100 MT) excess mass • Fly-over at 100m altitude
• Gravity Units:– 1 Gal = 0.01 m/sec2 = 1 milliG– 1 mGal = 10-5 m/sec2 = 1 microG
• Peak anomalous vertical gravity component: 0.55 mGal (5.5x10-6
m/sec2)
Vertical Component of Anomalous Gravity (mGal)
0.000.100.200.300.400.500.60
-4 -3 -2 -1 0 1 2 3 4
Distance to mascon encounter (km)
Gra
vity
(m
Gal
)

2005 September 222005 International Lunar Conference
Toronto, Ontario9
Airborne Gravity Gradiometry
• Gravity Gradient Units:– 1 Eo = 10-9 m/sec2/m
• Peak anomalous gravity gradient anomaly: ~10 Eo (1x10-8
m/sec2/m)
• 1 km deep spherical deposit• 1x1011 kg (100 MT) excess mass • Fly-over at 100m altitude
XX, ZZ and XZ Components of Anomalous Gravity Gradient
-12.0
-10.0
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
-4 -3 -2 -1 0 1 2 3 4
Distance to mascon encounter (km)
XX
an
d Z
Z G
ravi
ty G
rad
ien
t (E
o)
XX Gravity Gradient (Eo)
ZZ Gravity Gradient (Eo)
XZ Gravity Gradient (Eo)
2005 September 222005 International Lunar Conference
Toronto, Ontario10
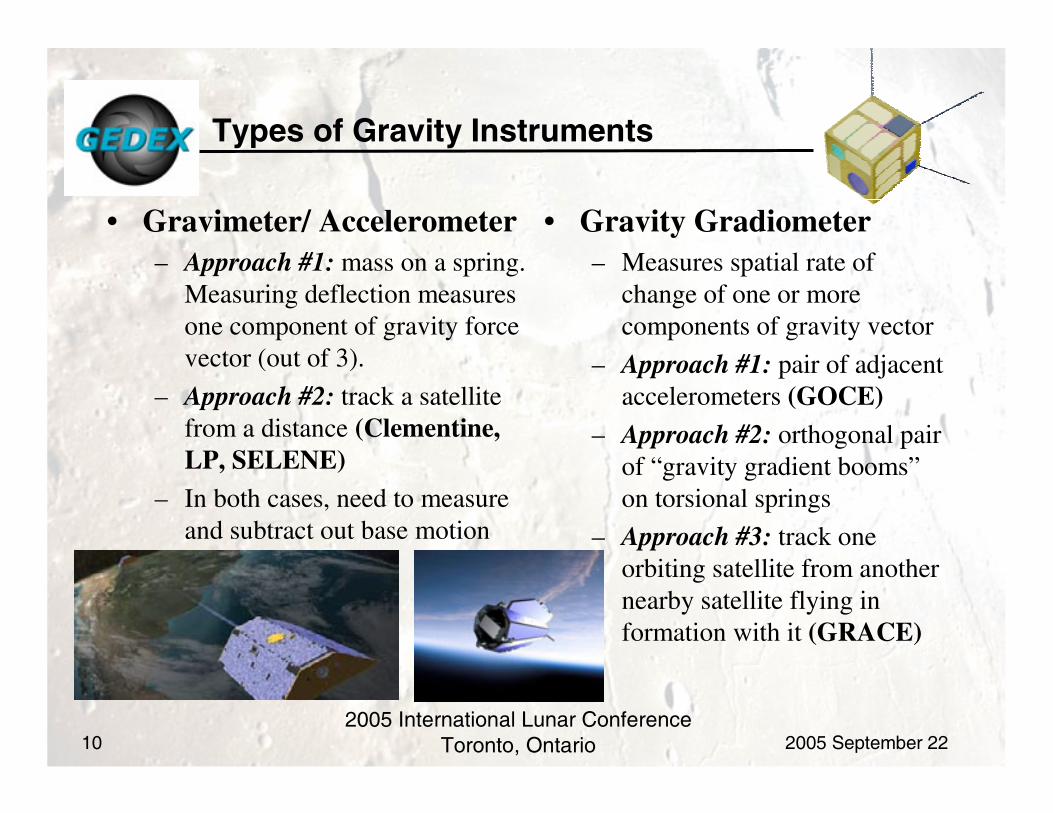
Types of Gravity Instruments
• Gravimeter/ Accelerometer– Approach #1: mass on a spring.
Measuring deflection measures one component of gravity force vector (out of 3).
– Approach #2: track a satellite from a distance (Clementine, LP, SELENE)
– In both cases, need to measure and subtract out base motion
• Gravity Gradiometer– Measures spatial rate of
change of one or more components of gravity vector
– Approach #1: pair of adjacent accelerometers (GOCE)
– Approach #2: orthogonal pair of “gravity gradient booms” on torsional springs
– Approach #3: track one orbiting satellite from another nearby satellite flying in formation with it (GRACE)

2005 September 222005 International Lunar Conference
Toronto, Ontario11
Gedex Cross Component Gravity Gradiometer
2005 September 222005 International Lunar Conference
Toronto, Ontario12
Lunar Gravity Mapping Background
• Robert L. Forward (Hughes Research Lab): – Proposed Lunar gravity gradiometer for Apollo, Lunar Polar Orbiter
(1965-75)
• Sjogren/Arkani-Hamed, JPL: – Apollo 18 sub-satellites
• Apollo, Clementine, Lunar Prospector radio tracking• Discovery of MASCONs• Nearside gravity map developed to medium accuracy• Various proposals for multi-hundred-million-$ Lunar gravity
mapping missions (e.g., ESA’s MORO), none yet flown• JAXA’s SELENE to fly in a low Lunar orbit with a high-orbit
relay satellite

2005 September 222005 International Lunar Conference
Toronto, Ontario13
Lunar Gravity Mapping for Science
• Fundamental questions regarding the Moon’s formation• “Nearside/farside dichotomy” (crust thin on nearside, thick on farside)• Nature of mass concentrations (mascons) below the maria and some craters• Enables improvement in topography modeling from laser altimeter data• Key to understanding Lunar geological formations:
– These in turn are key to prospecting for high-grade mineral deposits, by understanding if mare basalts originate near the surface or from the mantle
• NASA HQ Code S sees Lunar gravity mapping as a priority• Nearside maps complete to 10-20 mGal level• Farside maps all inferred from nearside tracking data:
– Using multiple eclipse entry/exit conditions– Questionable assumption: that farside spatial gravity variations are similar to
those on nearside– Resulting model is likely inaccurate

2005 September 222005 International Lunar Conference
Toronto, Ontario14
Current Lunar Gravity Models(Lunar Prospector)
Anomalous Gravity (mGal at surface)
Crustal Thickness (km)
Topography (km)
• Accurate topographical mapping requires an accurate gravity model
• Geological models are derived from both topography and gravity models

2005 September 222005 International Lunar Conference
Toronto, Ontario15
Lunar Gravity Mapping for Exploration
• Near-term:– Map farside mascons to allow precise navigation
during unmanned landings
– Improve Lunar geodetic model to enable precise topographical mapping from orbit
• Medium-Term:– Provide geological context to support base site
selection
– Help identify areas with potential high-concentration ice/mineral deposits
– Terrestrial analogy: “sovereignty mapping” (government surveys) with results disseminated
• Long-term:– Detailed site surveys to identify drilling/ excavation
targets: drilling/digging holes is very expensive!
– Terrestrial analogy: airborne geophysical surveys of claims
Iron Oxide
Titanium Dioxide

2005 September 222005 International Lunar Conference
Toronto, Ontario16
Microsat/Nanosat Technology
• Several 10-100 kg microsats <$10M now carrying out major LEO science missions: MOST, CHIPSat, PROBA-1, …
• Enabled by modern commercial consumer electronic components, from cell-phone, laptop, PDA and digital camera markets
• Well-proven in space environments worse than that near the Moon
• Low cost requires very efficient programme definition and management---almost all successful efforts based on AMSAT model
• Nanosats/Cubesats following close behind: 1-10 kg, some <$1M
• U of T’s Space Flight Laboratory is a pioneer in advanced nanosats, via their CanX nanosat program
CanX-1

2005 September 222005 International Lunar Conference
Toronto, Ontario17
Lunette
• Science mission: to map Lunar farside gravity field, to 10-20 mGal
• Free-flying nanosatellite, ejected from and flying in formation with a parent satellite, both in low Lunar orbit, measuring relative range rate using radio tracking
• Complements JAXA’s SELENE “high/low” mission:– More effective at measuring high-spatial-frequency
components of the gravity field
• ~5 kg, ~~$2-5M (if done as SFL nanosat)
• Science instrument: ranging radio transponder
• Bus needs 3-axis attitude control and propulsion
• Initially proposed as a subsatellite payload for ISRO’s Chandrayaan-1 lunar satellite:
– Was short-listed; complements ISRO LIDAR topography payload
• Suitable for flight with any of several upcoming Lunar polar orbiting missions

2005 September 222005 International Lunar Conference
Toronto, Ontario18
Baseline Design: Based on SFL’s CanX-3/BRITE Nanosat Bus
• Bright Star Photometry nanosat (“Nano-MOST”)
• 15x15x15 cm, <4 kg• Two fixed S-Band monopole
uplink antennas• Two S-Band patch downlink
antennas• Two fixed UHF monopole
beacon antennas• Body-mounted solar panels,
26% efficiency TJ cells, 4.1 W nominal power
• 3 nano reaction wheels
BSP Instrument
Li-ion Battery
GPS Antenna (2)
Star Tracker
Reaction Wheels (3)
UHF Beacon Antenna (2)
S-Band Uplink Antenna (2)
S-Band Downlink Antenna (2)
ACS Computer
Main OBC
Power Subsystem
S-Band TX/RX UHF Beacon GPS Receiver
TJ Solar Cells
Aluminium Panel and Sub-frame
5 cm

2005 September 222005 International Lunar Conference
Toronto, Ontario19
Lunette Technology
• Basic Nanosat Bus and Ejection System:– U of T/Space Flight Laboratory CanX nanosat program– One satellite built and flown, funding secured for next 2 missions
• Reaction Wheel: – Prototype built, will be test-flown on CanX-2
• Star Tracker: – Baseline: software from MOST star tracker, CMOS camera initial design/imager
testing under BRITE mission studies
• Nanosat propulsion (25-75 m/sec):– Baseline vendors identified, flight hardware built for 25m/sec, breadboard testing
done for 75m/sec– Alternative is SFL-developed nanosat propulsion
• Low-power transponder:– Baseline: based on MOST S-band transmitter
• Processing of tracking data to extract gravity models:– Baseline: use NASA GSFC/JPL code via US team members– Alternative is to adapt GRACE software

2005 September 222005 International Lunar Conference
Toronto, Ontario20
Lunette Measurement Sensitivity Calibration
• Calibration analysis scenario:• Spherical Mascon:
– 20 km deep– 35 km diameter– 1.5E16 kg excess mass
• Fly-over of mascon:– From -300 km to +300 km horizontally– 50 km altitude– 1.655 km/sec velocity
• Peak gravity anomaly: – 20 mGal (2e-4 m/sec^2)
• Peak inter-satellite speed variation:– Horizontal: 4 mm/sec– Vertical: 7 mm/sec
• Lunette target speed measurement sensitivity: 1 mm/sec after 10 seconds of averaging
Vertical and Horizontal Speed Variation Due To Mascon, 90km Inter-Satellite Horizontal Distance
-10
-5
0
5
10
15
20
0 50 100 150 200 250 300 350 400
Time (sec)
Sp
eed
Var
iati
on
(m
m/s
ec)
X Speed (Leading Satellite)
Z Speed (Leading Satellite)
X Speed Difference
Z Speed Difference
Vertical Component of Gravity Anomaly (mGal)
0
5
10
15
20
25
-400 -300 -200 -100 0 100 200 300 400
Distance to mascon encounter (km)
Gra
vity
(m
Gal
)
Gravity (mGal)
2005 September 222005 International Lunar Conference
Toronto, Ontario21
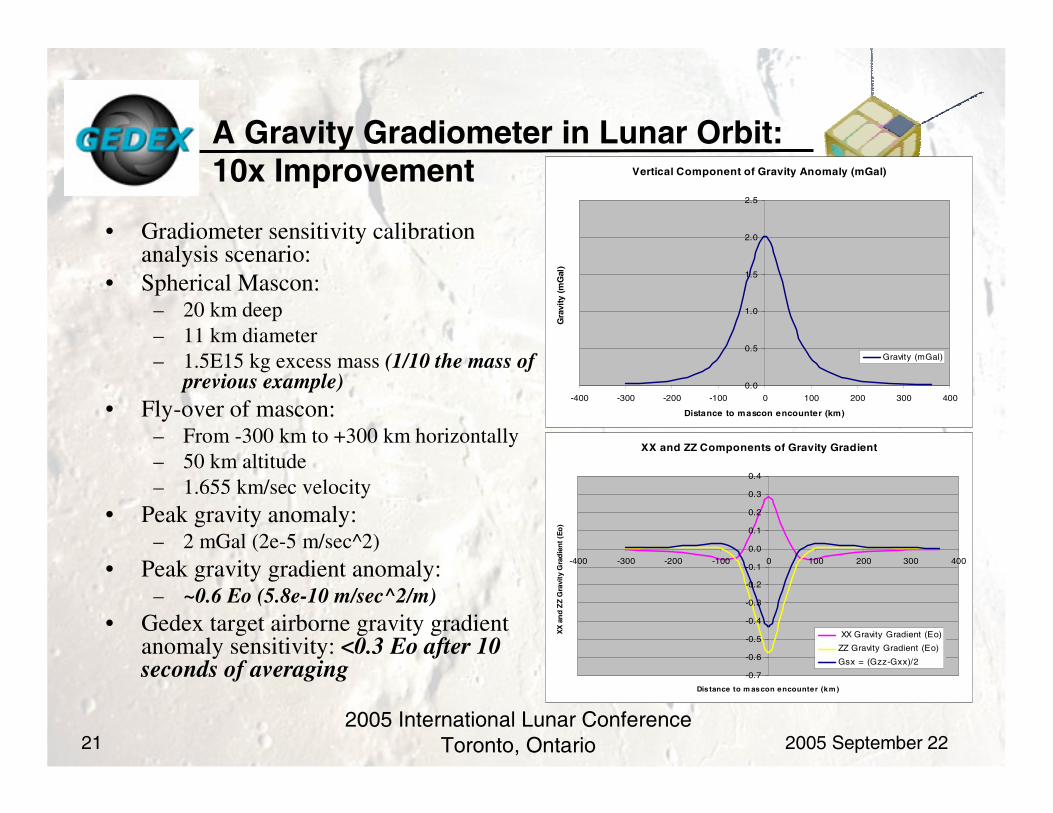
A Gravity Gradiometer in Lunar Orbit:10x Improvement
• Gradiometer sensitivity calibration analysis scenario:
• Spherical Mascon:– 20 km deep– 11 km diameter– 1.5E15 kg excess mass (1/10 the mass of
previous example)• Fly-over of mascon:
– From -300 km to +300 km horizontally– 50 km altitude– 1.655 km/sec velocity
• Peak gravity anomaly: – 2 mGal (2e-5 m/sec^2)
• Peak gravity gradient anomaly: – ~0.6 Eo (5.8e-10 m/sec^2/m)
• Gedex target airborne gravity gradient anomaly sensitivity: <0.3 Eo after 10 seconds of averaging
Vertical Component of Gravity Anomaly (mGal)
0.0
0.5
1.0
1.5
2.0
2.5
-400 -300 -200 -100 0 100 200 300 400
Distance to mascon encounter (km)
Gra
vity
(m
Gal
)
Gravity (mGal)
XX and ZZ Components of Gravity Gradient
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
-400 -300 -200 -100 0 100 200 300 400
Distance to m ascon encounter (km )
XX
an
d Z
Z G
ravi
ty G
rad
ien
t (E
o)
XX Gravity Gradient (Eo)
ZZ Gravity Gradient (Eo)
Gsx = (Gzz-Gxx)/2

2005 September 222005 International Lunar Conference
Toronto, Ontario22
MASCON Gravity Gradient Signature
• MASCONs are not point-masses– Shallow caps covering impact basins
• More-realistic MASCON model:– 5km thick circularly-symmetric
spherical shell– 10 degree solid angle (similar to
Imbrium MASCON): 300 km radius– Density difference: 500 kg/m3
• Simulated circular-orbit flyover, 50km above MASCON cap
• Calculated gradients in Tangential and Radial directions
10 deg
50km
T
R
5
1735km

2005 September 222005 International Lunar Conference
Toronto, Ontario23
gTT
gRR
gTR
gRT
MASCON Gravity Gradient Signature
Colatitude (deg)
Gravity Gradient (Eo)
-30 -20 -10
Gravity gradient is low near the center of the mascon
Gravity gradient is high near the edges of the mascon, with largest peaks from diagonal gradients

2005 September 222005 International Lunar Conference
Toronto, Ontario24
What Type of Gradiometer to Fly?
• GOCE type: – Room temperature pair of electrostatically levitated accelerometers– Suitable for orbital use– Unsuitable for use in Lunar surface application: too sensitive to angular
accelerations of base
• Gedex current type:– Superconducting cross component gradiometer– Suitable for orbital and ground use– Needs liquid helium cryostat
• Gedex next-generation gradiometer:– Room-temperature cross component type– Suitable for orbital and ground use– Mass should be microsat-compatible