LTI Discrete-Time Systems in Transform Domain
100
LTI Discrete LTI Discrete - - Time Time Systems Systems in Transform Domain in Transform Domain Frequency Response Frequency Response Transfer Function Transfer Function Introduction to Filters Introduction to Filters Tania Stathaki 811b [email protected]
Transcript of LTI Discrete-Time Systems in Transform Domain

LTI DiscreteLTI Discrete--Time Time SystemsSystems
in Transform Domainin Transform DomainFrequency ResponseFrequency Response
Transfer FunctionTransfer Function
Introduction to FiltersIntroduction to Filters
Tania Stathaki
811b

Frequency Response of anFrequency Response of anLTI DiscreteLTI Discrete--Time SystemTime System
• The well known convolution sum description of an
LTI discrete-time system is given by
• Taking the DTFT of both sides we obtain
][][][ knxkhnyk
−= ∑∞
−∞=
nj
n
j enyeY ω−∞
−∞=
ω ∑= ][)(
nj
n k
eknxkh ω−∞
−∞=
∞
−∞=∑
∑ −= ][][

Frequency Response of anFrequency Response of an
LTI DiscreteLTI Discrete--Time SystemTime System
• Or,
∑
∑=∞
−∞=
∞
−∞=
+ω−ω
k
kjj exkheYl
ll
)(][][)(
kj
k
j eexkh ω−∞
−∞=
∞
−∞=
ω−∑
∑=l
ll][][
)( ωjeX

Frequency Response of anFrequency Response of an
LTI DiscreteLTI Discrete--Time SystemTime System
• Hence, we can write
• The above equation relates the input and the output
of an LTI system in the frequency domain
• It follows that
)()()(][)( ωωω∞
−∞=
ω−ω =
∑= jjj
k
kjj eXeHeXekheY
)(/)()( ωωω = jjj eXeYeH

Frequency Response of anFrequency Response of an
LTI DiscreteLTI Discrete--Time SystemTime System
• The function is called the frequency
response of the LTI discrete-time system
• provides a frequency-domain
description of the system
• is precisely the DTFT of the impulse
response {h[n]} of the system
)( ωjeH
)( ωjeH
)( ωjeH

Frequency Response of anFrequency Response of an
LTI DiscreteLTI Discrete--Time SystemTime System
• , in general, is a complex function
of ω with a period 2π• It can be expressed in terms of its real and
imaginary part
or, in terms of its magnitude and phase,
where
)( ωjeH
)()()( ωωω += jim
jre
j eHjeHeH
)()()( ωθωω = jjj eeHeH
)(arg)( ω=ωθ jeH

Frequency Response of anFrequency Response of an
LTI DiscreteLTI Discrete--Time SystemTime System
• Note: Magnitude and phase functions are real
functions of ω, whereas the frequency response is a complex function of ω
• If the impulse response h[n] is real then it is proven
that the magnitude function is an even function of ω:
and the phase function is an odd function of ω:
• Likewise, for a real impulse response h[n],
is even and is odd
)( ωjre eH
)()( ω−ω = jj eHeH
)()( ω−θ−=ωθ
)( ωjim eH

Magnitude and Phase ResponseMagnitude and Phase Response
• The function is called the
magnitude response and the function
is called the phase response of an LTI
discrete-time system
• Design specifications for an LTI discrete-
time system, in many applications, are
given in terms of the magnitude response or
the phase response or both
)( ωjeH
)(ωθ

Gain FunctionGain Function
Attenuation/Loss FunctionAttenuation/Loss Function
• In some cases, the magnitude function is
specified in decibels as
where is called the gain function
• The negative of the gain function
is called the attenuation or loss function
dBeH j )(log20)ω(G ω
10=
)ω(G)ω(A −=
)ω(G

EigenfunctionEigenfunction of a Systemof a System
• If the input of an LTI system is a single
complex exponential function
then it follows that the output is given by
• Let
∞<<∞−= nenxnj o ,][
ω
nj
k
kj
k
knj ooo eekhekhnyωω)(ω
][][][
== ∑∑
∞
−∞=
−∞
−∞=
−
∑∞
−∞=
−=k
kjj ekheH ωω ][)(

EigenfunctionEigenfunction of a Systemof a System
• Therefore, we can write
• Thus for a complex exponential input signal
, the output of an LTI discrete-time
system is also a complex exponential signal
of the same frequency multiplied by a
complex constant
• is called eigenfunction of the system
njj oo eeHnyωω
)(][ =
)(ωoj
eH
nj oeω
nj oeω

Frequency Response of a System Frequency Response of a System
Described by a Difference EquationDescribed by a Difference Equation
• Consider an LTI discrete-time system characterized by a difference equation
• Its frequency response is obtained by taking the DTFT of both sides of the above equation
∑∑ == −=− Mk k
Nk k knxpknyd
00][][
∑
∑==
ω−=
ω−ω
Nk
kjk
Mk
kjkj
ed
epeH
0
0)(

Example 1 – Frequency Response
of a Moving Average (MA) Filter
• Consider the M-point moving average filter
with an impulse response given by
• Its frequency response is then given by
otherwise0101
,,/ −≤≤ MnM
=][nh
∑−
=
−=1
0
ωω 1)(
M
n
njj eM
eH

Example 1 - Moving Average Filter
• Or,
ω
ωω
1
11)(
j
jMj
e
e
MeH
−
−
−−
=
2/)1(
)2/sin(
)2/sin(1 ω−−
ωω
⋅= MjeM
M

Example 1 - Moving Average Filter
• Thus, the magnitude response of the M-
point moving average filter is given by
and the phase response is given by
)2/ωsin(
)2/ωsin(1)( ω M
MeH j =
)
2ω(
2
ω)1()ω(
2
1 M
kM M/
k
πµπθ −+
−−= ∑
=

Example 1 - Moving Average FilterFrequency Response ComputationFrequency Response Computation
Using MATLABUsing MATLAB
• The function freqz(h,w) can be used to
determine the values of the frequency response vector h at a set of given
frequency points w
• From h, the real and imaginary parts can be
computed using the functions real and
imag, and the magnitude and phase
functions using the functions abs and
angle

Example 1 - Moving Average Filter
Frequency Response ComputationFrequency Response Computation
Using MATLABUsing MATLAB
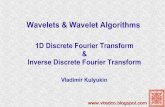
• The magnitude and phase responses of anM-point moving
average filter are shown below
• The jumps in the phase function occur at the zeros of the
frequency response, where the sinc function changes sign.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Magnitude
ω/π
M=5M=14
0 0.2 0.4 0.6 0.8 1-200
-150
-100
-50
0
50
100
Phase, degrees
ω/π
M=5M=14

Example 1 - Moving Average Filter
Frequency Response ComputationFrequency Response Computation
Using MATLABUsing MATLAB
• The phase response of a discrete-time system when determined by a computer may exhibit jumps by an amount 2π caused by the way the arctangent function is computed
• The phase response can be made a continuous function of ω by “unwrapping” the phase response across the jumps

Example 1 - Moving Average Filter
Frequency Response ComputationFrequency Response Computation
Using MATLABUsing MATLAB
• To this end the function unwrap can be
used, provided the computed phase is in
radians
• The jumps by the amount of 2π should not
be confused with the jumps caused by the
zeros of the frequency response as indicated
in the phase response of the moving average
filter

Example 2 – Steady-State Response
• Determine the steady-state output y[n] of a real
coefficient LTI discrete-time system with a
frequency response for an input
• Note that the frequency response determines the
steady-state response of an LTI discrete-time
system to a sinusoidal input
∞<<∞−φ+ω= nnAnx o ),cos(][
)( ωjeH

Example 2 – Steady State Response
• We can express the input x[n] as
where
• Now the output of the system for an input
is simply
][*][][ ngngnx +=
njj oeAeng ωφ=21][
nj oe ω
njj oo eeH ωω )(

Example 2 – Steady State Response
• Because of linearity, the response v[n] to an
input g[n] is given by
• Likewise, the output v*[n] to the input g*[n]
is
njjj oo eeHAenv ωωφ= )(][2
1
njjj oo eeHAenv ω−ω−φ−= )(][*2
1

Example 2 – Steady State Response
• Combining the last two equations we get
njjjnjjj oooo eeHAeeeHAeωωωω
)(2
1)(
2
1 −−−+= φφ
][*][][ nvnvny +=
{ }njjjnjjjj ooooo eeeeeeeHAω)ω(ω)ω(ω
)(2
1 −−−+= φθφθ
))ω(ωcos()(ω φθ ++= oo
jneHA o

Example 2 – Steady State Response
• Thus, the output y[n] has the same sinusoidal
waveform as the input with two differences:
(1) the amplitude is multiplied by ,
the value of the magnitude function at
(2) the output has a phase lag relative to the
input by an amount , the value of the
phase function at
)( ojeH ω
)( oωθ
oω=ω
oω=ω

Example 3 – Response to a
Causal Exponential Sequence
• The expression for the steady-state response
developed earlier assumes that the system is
initially relaxed before the application of
the input
• In practice, excitation (input) to a discrete-
time system is usually a right-sided
sequence applied at some sample index
• We develop the expression for the output
for such an input
onn =

Example 3 – Response to aCausal Exponential Sequence
• Without any loss of generality, assume
for n < 0
• From the input-output relation
we observe that for an input
the output is given by
∑∞−∞= −=
kknxkhny ][][][
][][][0
)( nekhnyn
k
knj µ
= ∑
=
−ω
][][ nenx nj µ= ω
0][ =nx

Example 3 – Response to aCausal Exponential Sequence
• Or,
• The output for n < 0 is y[n] = 0
• The output for is given by
][][][0
neekhny njn
k
kj µ
= ω
=
ω−∑
nj
nk
kjnj
k
kj eekheekh ω∞
+=
ω−ω∞
=
ω−
−
= ∑∑
10
][][
0≥n
njn
k
kj eekhny ω
=
ω−
= ∑
0
][][

Example 3 – Response to a
Causal Exponential Sequence
• Or,
• The first term on the RHS is the same as
that obtained when the input is applied at
n = 0 to an initially relaxed system and is
the steady-state response:
nj
nk
kjnjj eekheeHny ω∞
+=
ω−ωω
−= ∑
1
][)(][
njjsr eeHny ωω= )(][

Example 3 – Response to a
Causal Exponential Sequence
• The second term on the RHS is called the
transient response:
• To determine the effect of the above term
on the total output response, we observe
nj
nk
kjtr eekhny ω
∞
+=
ω−
−= ∑
1
][][
∑∑∑∞
=
∞
+=
∞
+=
−ω− ≤≤=011
)( ][][][][knknk
nkjtr khkhekhny

Example 3 – Response to a
Causal Exponential Sequence
• For a causal, stable LTI IIR discrete-time
system, h[n] is absolutely summable
• As a result, the transient response is a
bounded sequence
• Moreover, as ,
and hence, the transient response decays to
zero as n gets very large
][nytr
∞→n0][
1→∑∞
+=nkkh

Example 3 – Response to a
Causal Exponential Sequence
• For a causal FIR LTI discrete-time system
with an impulse response of length N + 1,
h[n] = 0 for n > N
• Hence, for
• Here the output reaches the steady-state
value at n = N
0][ =nytr 1−> Nn
njjsr eeHny ωω= )(][

The Transfer FunctionThe Transfer Function
• The transfer function is a generalization of
the frequency response function
• The convolution sum description of an LTI
discrete-time system with an impulse
response h[n] is given by
∑∞
−∞=−=
k
knxkhny ][][][

The Transfer FunctionThe Transfer Function
• Taking the z-transform of both sides we get
n
n kn
n zknxkhznyzY −∞
−∞=
∞
−∞=
∞
−∞=
− ∑ ∑∑
−== ][][][)(
∑ ∑∞
−∞=
∞
−∞=
−
−=
k n
nzknxkh ][][
∑ ∑∞
−∞=
∞
−∞=
+−
=k
kzxkhl
ll
)(][][

The Transfer FunctionThe Transfer Function
• Or,
• Therefore,
• Thus, Y(z) = H(z)X(z)
k
k
zzxkhzY −∞
−∞=
∞
−∞=
−∑ ∑
=
l
ll][][)(
)(zX
)(][)( zXzkhzYk
k
= ∑
∞
−∞=
−
)(zH

The Transfer FunctionThe Transfer Function
• Hence,
• The function H(z), which is the z-transform of
the impulse response h[n] of the LTI system,
is called the transfer function or the system
function
• The inverse z-transform of the transfer
function H(z) yields the impulse response h[n]
)(/)()( zXzYzH =

The Transfer FunctionThe Transfer Function
• Consider an LTI discrete-time system
characterized by a difference equation
• Its transfer function is obtained by taking
the z-transform of both sides of the above
equation
∑∑ == −=− Mk k
Nk k knxpknyd
00][][
∑∑
=−
=−
=Nk
kk
Mk
kk
zd
zpzH
0
0)(

The Transfer FunctionThe Transfer Function
• Or, equivalently
• An alternate form of the transfer function is given by
∑∑
=−
=−
−=Nk
kNk
Mk
kMkMN
zd
zpzzH
0
0)()(
∏∏
=
−
=
−
−
−=
N
k k
M
k k
z
z
d
pzH
1
1
1
1
0
0
)1(
)1()(
λ
ξ

The Transfer FunctionThe Transfer Function
• Or, equivalently
• are the finite zeros, and
are the finite poles of H(z)
• If N > M, there are additional zeros
at z = 0
• If N < M, there are additional poles
at z = 0
Mξξξ ,...,, 21
Nλλλ ,...,, 21
)( MN −
)( NM −
∏∏
=
=−
−
−=
Nk k
Mk kMN
z
zz
d
pzH
1
1
0
0
)(
)()( )(
λ
ξ

The Transfer FunctionThe Transfer Function
• If then H(z) can be re-expressed as
where the degree of is less than N
• The rational function is called a
proper fraction
)(
)()( 1
0 zD
zPzzH
NM
∑−
=
− +=l
l
lη
NM ≥
)(zP1
)(/)( zDzP1

The Transfer FunctionThe Transfer Function
• Simple Poles: In most practical cases, the
rational z-transform of interest H(z) is a
proper fraction with simple poles
• Let the poles of H(z) be at ,
• A partial-fraction expansion of H(z) is then
of the form
kz λ= Nk ≤≤1
∑=
−
−=
N
zzH
111
)(l l
l
λρ

The Transfer FunctionThe Transfer Function
• The constants in the partial-fraction
expansion are called the residues and are
given by
• Each term of the sum in partial-fraction
expansion has an ROC given by
and, thus has an inverse transform of the
form
lρ
lll λ
λρ=
−−=z
zHz )()1( 1
lλz >
][)( nnµλρll

The Transfer Function The Transfer Function -- StabilityStability
• Therefore, the impulse response h[n] is of
infinite duration (IIR) and is given by
• Thus, the ROC is given by
• Furthermore, for stability, , which means
that all poles must lie inside the unit circle
kk
z λmax>
∑=
=N
n nnh1
][)(][l
llµλρ
1<kλ

The Transfer Function The Transfer Function -- StabilityStability
• Therefore, for a stable and causal digital filter for
which h[n] is a right-sided sequence, the ROC will
include the unit circle and the entire z-plane
including the point
• On the other hand, FIR digital filters with bounded
impulse response are always stable
• Problem: Use the above approach to determine the
inverse of a rational z-transform of a noncausal
sequence
∞=z

The Transfer Function The Transfer Function -- StabilityStability
• On the other hand, an IIR filter may be
unstable if not designed properly
• In addition, an originally stable IIR filter
characterized by infinite precision
coefficients may become unstable when
coefficients get quantized due to
implementation

Example 4 – Effects of Quantization
• Consider the causal IIR transfer function
• The plot of the impulse response coefficients
is shown on the next slide
21 850586084511
1−− +−
=zz
zH..
)(

Example 4 – Effects of Quantization
• As can be seen from the above plot, the
impulse response coefficient h[n] decays
rapidly to zero value as n increases
0 10 20 30 40 50 60 700
2
4
6
Time index n
Amplitude
h[n]

Example 4 – Effects of Quantization
• The absolute summability condition of h[n]
is satisfied
• Hence, H(z) is a stable transfer function
• Now, consider the case when the transfer
function coefficients are rounded to values
with 2 digits after the decimal point:
21 8508511
1−− +−
=zz
zH..
)(^

Example 4 – Effects of Quantization
• A plot of the impulse response of is
shown below
][nh^
0 10 20 30 40 50 60 700
2
4
6
Time index n
Amplitude
][nh^

Example 4 – Effects of Quantization
• In this case, the impulse response coefficient
increases rapidly to a constant value as
n increases
• Hence, the absolute summability condition of
is violated
• Thus, is an unstable transfer function
][nh^
)(zH^

Example 5 – Transfer Function
of a Moving Average Filter
• Consider the M-point moving-average FIR
filter with an impulse response
• Its transfer function is then given by
=][nh
otherwise,010,/1 −≤≤ MnM
∑−
=
−=1
0
1)(
M
n
nzM
zH)]1([
1
)1(
11 −
−=
−−
= −
−
zzM
z
zM
zM
MM

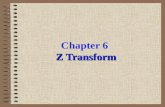
Example 5 – Moving Average Filter
• The transfer function has M zeros on the
unit circle at ,
• There are poles at z = 0 and a single
pole at z = 1
• The pole at z = 1
exactly cancels the
zero at z = 1
• The ROC is the entire
z-plane except z = 0
Mkjez /2π= 10 −≤≤ Mk
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Real Part
Imaginary Part
7
M = 8
1−M

Example 6 – An IIR Filter
• A causal LTI IIR digital filter is described
by a constant coefficient difference equation
given by
• Its transfer function is therefore given by
]1[3.1]3[]2[2.1]1[][ −+−+−−−= nynxnxnxny
]3[222.0]2[4.1 −+−− nyny
321
321
222.004.13.11
2.1)( −−−
−−−
−+−+−
=zzz
zzzzH

Example 6 – An IIR Filter
• Alternate forms:
• Note: Poles farthest from
z = 0 have a magnitude
• ROC:
222.004.13.1
12.1)(
23
2
−+−+−
=zzz
zzzH
)7.05.0)(7.05.0)(3.0(
)8.06.0)(8.06.0(
jzjzz
jzjz
−−+−−−−+−
=
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Real Part
Imaginary Part
74.0>z
74.0

Frequency Response from Frequency Response from
Transfer FunctionTransfer Function
• If the ROC of the transfer function H(z)
includes the unit circle, then the frequency
response of the LTI digital filter can
be obtained simply as follows:
• For a real coefficient transfer function H(z)
it can be shown that
ω=ω = jezj zHeH )()(
)( ωjeH
)(*)()(2 ωωω = jjj eHeHeH
ω=−ω−ω ==
jez
jj zHzHeHeH )()()()( 1

Frequency Response from Frequency Response from
Transfer FunctionTransfer Function
• For a stable rational transfer function in the
form
the factored form of the frequency response
is given by
∏∏
=
=−
−
−=
Nk k
Mk kMN
z
zz
d
pzH
1
1
0
0
)(
)()( )(
λ
ξ
∏∏
=ω
=ω
−ωω
λ−
ξ−=
Nk k
j
Mk k
jMNjj
e
ee
d
peH
1
1)(
0
0
)(
)()(

Frequency Response from Frequency Response from
Transfer FunctionTransfer Function
• It is convenient to visualize the contributions
of the zero factor and the pole factor
from the factored form of the
frequency response
• The magnitude function is given by
)( kz ξ−)( kz λ−
∏∏
=ω
=ω
−ωω
λ−
ξ−=
Nk k
j
Mk k
jMNjj
e
ee
d
peH
1
1)(
0
0)(

Frequency Response from Frequency Response from
Transfer FunctionTransfer Function
which reduces to
• The phase response for a rational transfer
function is of the form
∏∏
=ω
=ω
ω
λ−
ξ−=
Nk k
j
Mk k
jj
e
e
d
peH
1
1
0
0)(
)()/arg()(arg 00 MNdpeH j −ω+=ω
∑∑=
ω
=
ω λ−−ξ−+N
kk
jM
kk
j ee11
)arg()arg(

Frequency Response from Frequency Response from
Transfer FunctionTransfer Function
• The magnitude-squared function of a real-
coefficient transfer function can be
computed using
∏∏
=ω−ω
=ω−ω
ω
λ−λ−
ξ−ξ−=
Nk k
jk
j
Mk k
jk
jj
ee
ee
d
peH
1*
1*2
0
02
))((
))(()(

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• The factored form of the frequency
response
is convenient to develop a geometric
interpretation of the frequency response
computation from the pole-zero plot as ωvaries from 0 to 2π on the unit circle
∏∏
=ω
=ω
−ωω
λ−
ξ−=
Nk k
j
Mk k
jMNjj
e
ee
d
peH
1
1)(
0
0
)(
)()(

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• The geometric interpretation can be used to
obtain a sketch of the response as a function
of the frequency
• A typical factor in the factored form of the
frequency response is given by
where is a zero if it is zero factor or is
a pole if it is a pole factor
)( φω ρ− jj eeφρ je

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• As shown below in the z-plane the factor
represents a vector starting at
the point and ending on the unit
circle at
φρ= jezω= jez
)( φω ρ− jj ee

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• As ω is varied from 0 to 2π, the tip of the vector moves counterclockise from the
point z = 1 tracing the unit circle and back
to the point z = 1

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• As indicated by
the magnitude response at a
specific value of ω is given by the product
of the magnitudes of all zero vectors
divided by the product of the magnitudes of
all pole vectors
∏∏
=ω
=ω
ω
λ−
ξ−=
Nk k
j
Mk k
jj
e
e
d
peH
1
1
0
0)(
|)(| ωjeH

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• Likewise, from
we observe that the phase response
at a specific value of ω is obtained by
adding the phase of the term and the
linear-phase term to the sum of
the angles of the zero vectors minus the
angles of the pole vectors
00 dp /
)( MN −ω
)()/arg()(arg 00 MNdpeH j −ω+=ω
∑ λ−−∑ ξ−+ =ω
=ω N
k kjM
k kj ee 11 )arg()arg(

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• Thus, an approximate plot of the magnitude
and phase responses of the transfer function
of an LTI digital filter can be developed by
examining the pole and zero locations
• Now, a zero (pole) vector has the smallest
magnitude when ω = φ

Geometric Interpretation of Geometric Interpretation of
Frequency Response ComputationFrequency Response Computation
• To highly attenuate signal components in a
specified frequency range, we need to place
zeros very close to or on the unit circle in
this range
• Likewise, to highly emphasize signal
components in a specified frequency range,
we need to place poles very close to or on
the unit circle in this range

The Concept of FilteringThe Concept of Filtering
• One application of an LTI discrete-time
system is to pass certain frequency
components of an input sequence without
any distortion (if possible) and to block
other frequency components
• Such systems are called digital filters and
one of the main subjects of discussion in
this course

The Concept of FilteringThe Concept of Filtering
• Let us consider the IDTFT
• This transform expresses an arbitrary system output signal as a linear weighted sum of an infinite number of exponential sequences
∫−
=π
ππω)()(
2
1][ ωωω deeXeHny njjj

The Concept of FilteringThe Concept of Filtering
• Thus, by appropriately choosing the values
of the magnitude function of the
LTI digital filter, some of the input
frequency components can be selectively
heavily attenuated or filtered with respect to
the others
)( ωjeH

The Concept of FilteringThe Concept of Filtering
• To understand the mechanism behind the
design of frequency-selective filters,
consider a real-coefficient LTI discrete-time
system characterized by a magnitude
function
≅ω)( jeH
π≤ω<ωω≤ω
c
c
,0
,1

The Concept of FilteringThe Concept of Filtering
• We apply an input
to this system
• Because of linearity, the output of this system is of
the form
πωωωωω <<<<+= 2121 0,coscos][ cnBnAnx
( ))(cos)(][ 111 ωθ+ω= ω neHAny j
( ))(cos)( 222 ωθ+ω+ ω neHB j

The Concept of FilteringThe Concept of Filtering
• As
the output reduces to
• Thus, the system acts like a lowpass filter
• In the following example, we consider the
design of a very simple digital filter
0)(,1)( 21 ≅≅ ωω jj eHeH
( ))(cos)(][ 111 ωθ+ω≅ ω neHAny j

Example 7 - The Concept of Filtering
• An input signal consists of a sum of two
sinusoidal sequences of angular frequencies 0.1
rad/sample and 0.4 rad/sample
• We need to design a highpass filter that will pass
the high-frequency components of the input but
block the low-frequency components
• For simplicity, assume the filter to be an FIR
filter of length 3 with an impulse response:
h[0] = h[2] = α, h[1] = β

Example 7 - The Concept of Filtering
• The convolution sum description of this
filter is then given by
• y[n] and x[n] are, respectively, the output
and the input sequences
• Design Objective: Choose suitable values
of α and β so that the output is a sinusoidal
sequence with a frequency 0.4 rad/sample
]2[]2[]1[]1[][]0[][ −+−+= nxhnxhnxhny
]2[]1[][ −α+−β+α= nxnxnx

Example 7 - The Concept of Filtering
• Now, the frequency response of the FIR
filter is given byω−ω−ω ++= 2]2[]1[]0[)( jjj ehehheH
ω−ω− β++α= jj ee )1( 2
ω−ω−ω−ω
β+
+α= jj
jj
eeee
22
ω−β+ωα= je)cos2(

Example 7 - The Concept of Filtering
• The magnitude and phase functions are
• In order to block the low-frequency
component, the magnitude function at
ω = 0.1 should be equal to zero
• Likewise, to pass the high-frequency
component, the magnitude function at
ω = 0.4 should be equal to one
β+ωα=ω cos2)( jeH
ω−=ωθ )(

Example 7 - The Concept of Filtering
• Thus, the two conditions that must be
satisfied are
• Solving the above two equations we get
0)1.0cos(2)( 1.0 =β+α=jeH
1)4.0cos(2)( 4.0 =β+α=jeH
76195.6−=α456335.13=β

Example 7 - The Concept of Filtering
• Thus the output-input relation of the FIR filter is
given by
where the input is
( ) ]1[456335.13]2[][76195.6][ −+−+−= nxnxnxny
][)}4.0cos()1.0{cos(][ nnnnx µ+=

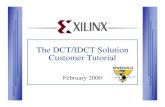
Example 7 - The Concept of Filtering
• Figure below shows the plots generated by
running this program
0 20 40 60 80 100
-1
0
1
2
3
4
Amplitude
Time index n
y[n]x2[n]
x1[n]

Example 7 - The Concept of Filtering
• The first seven samples of the output are
shown below

Example 7 - The Concept of Filtering
• From this table, it can be seen that,
neglecting the least significant digit,
• Computation of the present value of the
output requires the knowledge of the
present and two previous input samples
• Hence, the first two output samples, y[0]
and y[1], are the result of assumed zero
input sample values at and
2for))1(4.0cos(][ ≥−= nnny
1−=n 2−=n

Example 7 - The Concept of Filtering
• Therefore, first two output samples
constitute the transient part of the output
• Since the impulse response is of length 3,
the steady-state is reached at n = N = 2
• Note also that the output is delayed version
of the high-frequency component cos(0.4n)
of the input, and the delay is one sample
period

Phase and Group DelaysPhase and Group Delays
• The output y[n] of a frequency-selective
LTI discrete-time system with a frequency
response exhibits some delay
relative to the input x[n] caused by the
nonzero phase response
of the system
• For an input
)( ωjeH
)}(arg{)( ω=ωθ jeH
∞<<∞−+= nnAnx o ),cos(][ φω

Phase and Group DelaysPhase and Group Delays
the output is
• Thus, the output lags in phase by
radians
• Rewriting the above equation we get
))(cos()(][ φ+ωθ+ω= ωoo
j neHAny o
)( oωθ
φ+
ωωθ
+ω= ω
o
oo
j neHAny o)(
cos)(][

Phase and Group DelaysPhase and Group Delays
• This expression indicates a time delay,
known as phase delay, at given by
• Now consider the case when the input
signal contains many sinusoidal
components with different frequencies that
are not harmonically related
oω=ω
o
oop ω
ωθ−=ωτ
)()(

Phase and Group DelaysPhase and Group Delays
• In this case, each component of the input
will go through different phase delays when
processed by a frequency-selective LTI
discrete-time system
• Then, the output signal, in general, will not
look like the input signal
• The signal delay now is defined using a
different parameter

Phase and Group DelaysPhase and Group Delays
• To develop the necessary expression,
consider a discrete-time signal x[n] obtained
by a double-sideband suppressed carrier
(DSB-SC) modulation with a carrier
frequency of a low-frequency sinusoidal
signal of frequency :oωcω
)cos()cos(][ nnAnx co ωω=

Phase and Group DelaysPhase and Group Delays
• The input can be rewritten as
where and
• Let the above input be processed by an LTI
discrete-time system with a frequency
response satisfying the condition
)cos()cos(][22
nnnx uAA ω+ω= l
oc ω−ω=ωl ocu ω+ω=ω
)( ωjeH
ujeH ω≤ω≤ω≅ω
lfor1)(

Phase and Group DelaysPhase and Group Delays
• The output y[n] is then given by
• Note: The output is also in the form of a modulated
carrier signal with the same carrier frequency
and the same modulation frequency as the input
( ) ))(cos()(cos][22 uuAA nnny ωθ+ω+ωθ+ω= ll
ωθ−ωθ
+ω
ωθ+ωθ
+ω=2
)()(cos
2
)()(cos ll u
ou
c nnA
cω
oω

Phase and Group DelaysPhase and Group Delays
• However, the two components have
different phase lags relative to their
corresponding components in the input
• Now consider the case when the modulated
input is a narrowband signal with the
frequencies and very close to the
carrier frequency , i.e. is very smalllω uω
cω oω

Phase and Group DelaysPhase and Group Delays
• In the neighborhood of we can express
the unwrapped phase response as
by making a Taylor’s series expansion and
keeping only the first two terms
• Using the above formula we now evaluate
the time delays of the carrier and the
modulating components
cω)(ωθc
)()(
)()( cc
ccc
cd
dω−ω⋅
ωωθ
+ωθ≅ωθω=ω

Phase and Group DelaysPhase and Group Delays
• In the case of the carrier signal we have
which is seen to be the same as the phase
delay if only the carrier signal is passed
through the system
c
cc
c
cuc
ωωθ
−≅ω
ωθ+ωθ−
)(
2
)()( l

Phase and Group DelaysPhase and Group Delays
• In the case of the modulating component we have
• The parameter
is called the group delay or envelope delaycaused by the system at
cd
d c
u
cuc
ω=ωωωθ
−≅ω−ω
ωθ−ωθ−
)()()(
l
l
cd
d ccg
ω=ωωωθ
−=ωτ)(
)(
cω=ω

Phase and Group DelaysPhase and Group Delays
• The group delay is a measure of the
linearity of the phase function as a function
of the frequency
• It is the time delay between the waveforms
of underlying continuous-time signals
whose sampled versions, sampled at t = nT,
are precisely the input and the output
discrete-time signals

Phase and Group DelaysPhase and Group Delays
• If the phase function and the angular
frequency ω are in radians per second, then
the group delay is in seconds
• Figure below illustrates the evaluation of
the phase delay and the group delay

Phase and Group DelaysPhase and Group Delays
• Figure below shows the waveform of an
amplitude-modulated input and the output
generated by an LTI system

Phase and Group DelaysPhase and Group Delays
• Note: The carrier component at the output is
delayed by the phase delay and the envelope
of the output is delayed by the group delay
relative to the waveform of the underlying
continuous-time input signal
• The waveform of the underlying continuous-
time output shows distortion when the group
delay of the LTI system is not constant over
the bandwidth of the modulated signal

Phase and Group DelaysPhase and Group Delays
• If the distortion is unacceptable, a delay
equalizer is usually cascaded with the LTI
system so that the overall group delay of the
cascade is approximately linear over the band
of interest
• To keep the magnitude response of the parent
LTI system unchanged the equalizer must
have a constant magnitude response at all
frequencies

Example 8 - Phase and Group Delay
of a Second Order FIR Filter
• The phase function of the FIR filter
with is
• Hence its group delay is given by
][][][][ 21 −+−+= nxnxnxny αβαω−=ωθ )(
1)( =ωτg
αβ 2>

Example 8 - Phase and Group Delay
of an M-order MA filter
• For theM-point moving-average filter
the phase function is
• Hence its group delay is
=][nh
otherwise0101
,,/ −≤≤ MnM
∑=
−+−
−=2/
1
2ω
2
ω)1()ω(
M
k M
kM πµπθ
2
1)ω(
−=M
gτ