
Livro Completo sobre Maple
295
MAPLE PARA CÁLCULO EM UMA VARIÁVEL 2 4 6 8 10 0.2 0.2 0.4 0.6 Mauricio A. Vilches - Maria Hermínia de P. Leite Departamento de Análise - IME UERJ
-
Upload
kaique-santos-teixeira -
Category
Engineering
-
view
212 -
download
15
Transcript of Livro Completo sobre Maple

MAPLE PARA CÁLCULO EM UMAVARIÁVEL
2 4 6 8 10
-0.2
0.2
0.4
0.6
Mauricio A. Vilches - Maria Hermínia de P. Leite
Departamento de Análise - IMEUERJ

2
Todos os direitos reservadosProibida a reprodução parcial ou total

3
PREFÁCIO
Esse livro surgiu da necessidade de modernização do ensino de Cálculo Diferen-cial e Integral, na Universidade do Estado do Rio de Janeiro, UERJ. O texto,elaborado para a disciplina introdutória, Cálculo I, foi concebido para servir deguia a todos que buscam uma renovação da prática docente, de modo a con-ciliar aspectos do ensino tradicional com a utilização de recursos computacio-nais. A intenção que norteou essa iniciativa foi, não somente ilustrar melhoros conceitos teóricos, através da utilização dos recursos gráficos e da elaboraçãode cálculos algébricos mais complexos que são possibilitados pelos programascomputacionais matemáticos, mas, principalmente, promover uma mudança demetodologia.
O objetivo principal do livro é transformar o conceito tradicional, onde o pro-fessor, em geral, é o único participante ativo da atividade de ensino, sendo osalunos meros receptores, numa parceria, onde tanto mestre como alunos pos-sam interagir, todos participando ativamente do desenvolvimento da aula.
Acreditamos que a utilização desse livro irá auxiliar o professor no seu papelde orientador, instigador e moderador do processo de aprendizagem, bem comopossibilitará que os alunos se tornem verdadeiros colaboradores na elaboraçãoda aula, através de uma melhor compreensão dos conceitos abordados, de umabusca mais divertida das soluções de muitos dos problemas propostos e da cria-ção, por eles próprios, de novas tarefas ou exercícios.
Outro aspecto que consideramos de grande importância é desmistificar a idéiade que "o computador é capaz de tudo", idéia essa, que parece se firmar, cadavez mais, num mundo que presencia o ritmo acelerado em que se desenvolve aTecnologia de Informação e Comunicação. As limitações dos algoritmos empre-gados em certas versões dos programas computacionais ocasionam deficiênciasnas resoluções de alguns problemas matemáticos. São os chamados conflitoscomputacionais. Assim, desejamos também que o aluno desenvolva um sensocrítico em relação ao uso da "máquina"e percebam que não se pode abster "dopensar"e que "o cérebro é ainda a melhor máquina". Por isso, a seção 1.23

4
do Capítulo 1 é dedicada a problemas matemáticos, que não são resolvidos demaneira satisfatória pela versão do MAPLE que utilizamos.
No Curso de Matemática da UERJ, a disciplina de Cálculo I, com aulas ex-positivas tradicionais, é complementada com uma disciplina de Laboratório deCálculo I. Para as aulas de laboratório, utilizamos o programaMAPLE. A expe-riência dos autores em ministrar, simultaneamente, por mais de dois anos, essasduas disciplinas, a teórica e de laboratório, possibilitou a elaboração desse texto,que apresenta, em todos os seus capítulos, os comandos básicos do MAPLE,versão 9.5, relacionando-os com os conceitos que são abordados na disciplinateórica. Muitos poderiam observar que esses comandos são obtidos através da"Ajuda"do programa. No entanto, lembramos que o aluno está tendo o seuprimeiro contato com o Cálculo Diferencial e Integral e muitos deles não têm oconhecimento, nem da terminologia empregada no Cálculo, nem dos programascomputacionais que podem ser utilizados nessa área. Assim, sentem dificul-dades em manipular tais programas, a começar pela própria busca de tópicos.Portanto, o fato do livro explicitar os comandos mais básicos do MAPLE poupaum tempo precioso do aluno, que poderá melhor empregá-lo para se dedicar áresolução de problemas e desenvolvimento de projetos que viabilizem a aprendi-zagem dos conceitos matemáticos.
O conteúdo do livro é o mesmo de um curso tradicional de Cálculo, mas o seuenfoque foi o da utilização do computador como ferramenta para a resolução deexercícios e de chamar a atenção para a ocorrência de eventuais conflitos com-putacionais. Tem a vantagem de ser auto-explicativo, o que permite ao alunodeterminar o seu próprio ritmo de estudo, além de contribuir para o seu desem-penho individual. Como muitas das sintaxes dos programas computacionaisutilizados em Matemática são parecidas, nossa experiência mostra que, apósesse primeiro contato com a disciplina Laboratório de Cálculo I, onde se fez aopção de usar o MAPLE, o aluno adquire habilidade para lidar com esse tipo deferramenta computacional e consegue facilmente manipular outros programassemelhantes.
Não podemos deixar de externar nossos mais sinceros agradecimentos ao pro-fessor Mário Olivero Marques da Silva, do Instituto de Matématica da Uni-versidade Federal Fluminense, UFF, que foi um dos idealizadores de um projetopioneiro, realizado na UFF, no final da década de 1990, que utilizou o Maple

5
V como uma ferramenta didática para auxiliar a compreensão do conteúdo pro-gramático da disciplina de Cálculo I. Um dos produtos gerados por esse projetofoi o material didático que pode ser encontrado nas referências e do qual nosutilizamos, como ponto de partida, para as nossas primeiras experiências leci-onando a disciplina de Laboratório de Cálculo I, na UERJ. Assim, muitas dasidéias contidas nesse livro sofreram influência dessa iniciativa pioneira.
Os autores
Rio de Janeiro - Brasil

6

Conteúdo
1 COMANDOS BÁSICOS DOMAPLE 111.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Início . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3 Operações e Números Pré-Definidos . . . . . . . . . . . . . . . . . . . . . . . . . . 121.4 Funções Pré-Definidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.5 Cálculos Aproximados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.6 Manipulações Algébricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.7 Equações, Inequações e Sistemas de Equações . . . . . . . . . . . . . . . . . . . . 211.8 Nomeação de Objetos e Substituições . . . . . . . . . . . . . . . . . . . . . . . . . 251.9 Livrarias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.9.1 Livraria - RealDomain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.10 Conjuntos e Sequências . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301.11 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2 FUNÇÕES DE UMA VARIÁVEL 352.1 Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.2 Conversão de Expressões em Funções . . . . . . . . . . . . . . . . . . . . . . . . . 392.3 Funções Definidas por Partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.4 Composta de Funções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.5 Função Inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.6 Gráficos de Funções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.7 Gráficos de Outros Tipos de Funções . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.7.1 Gráficos de Funções Definidas por Partes . . . . . . . . . . . . . . . . . . . 512.7.2 Gráficos de Funções Definidas por Tabelas . . . . . . . . . . . . . . . . . . 53
2.8 Livraria do Plot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.9 Gráficos de Regiões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612.10 Animações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.11 Traçado de Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 642.12 Deficiências do MAPLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 662.13 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3 LIMITES E CONTINUIDADE 753.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753.2 Limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 783.3 Cálculo de Limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
7

8 CONTEÚDO
3.4 Definição de Limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 863.5 Assíntotas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 893.6 Continuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 953.7 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4 DERIVADA 1074.1 Retas Secantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1074.2 Reta Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1104.3 Funções Deriváveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1164.4 Sintaxes que envolvem a Derivada . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
4.4.1 O Operador Diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1224.5 Regra da Cadeia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1244.6 Derivaçãos Implícita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1254.7 Aproximação Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1284.8 Aproximação de Ordem Superior . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1324.9 Polinômio de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1324.10 Erros de Aproximação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1374.11 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5 VARIAÇÃO DE FUNÇÕES 1475.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1475.2 Determinação de Máximos e Mínimos . . . . . . . . . . . . . . . . . . . . . . . . . 1485.3 Concavidade e Pontos de Inflexão de Funções . . . . . . . . . . . . . . . . . . . . 1535.4 Problemas de Otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1615.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
6 INTEGRAÇÃO INDEFINIDA 1716.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1716.2 Método de Substituição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1746.3 Método de Integração por Partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1776.4 Método para Integração de Funções Racionais . . . . . . . . . . . . . . . . . . . . 1796.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
7 INTEGRAÇÃODEFINIDA 1877.1 Intodução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1877.2 Definição e Cálculo da Integral Definida . . . . . . . . . . . . . . . . . . . . . . . 1977.3 Teorema Fundamental do Cálculo e Construção de Primitivas . . . . . . . . . . . 1997.4 Definição de Logaritmo Natural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
7.4.1 Logaritmo como Área . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2037.4.2 Método de Substituição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2067.4.3 Método de Integração por Partes . . . . . . . . . . . . . . . . . . . . . . . . 2067.4.4 Método para Funções Racianais . . . . . . . . . . . . . . . . . . . . . . . . 206
7.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211

CONTEÚDO 9
8 APLICAÇÕESDA INTEGRALDEFINIDA 2178.1 Áreas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2178.2 Cálculo do Comprimento de Arco . . . . . . . . . . . . . . . . . . . . . . . . . . . 2278.3 Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2318.4 Volume de Sólidos de Revolução . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
8.4.1 Cálculo do Volume dos Sólidos . . . . . . . . . . . . . . . . . . . . . . . . . 2378.4.2 Método das Arruelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
8.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
9 INTEGRAIS IMPRÓPRIAS 2579.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2579.2 Integrais Definidas em Intervalos Ilimitados . . . . . . . . . . . . . . . . . . . . . 2579.3 Valor Principal de uma Integral Imprópria . . . . . . . . . . . . . . . . . . . . . . 2639.4 Função Gama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2659.5 Probabilidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
9.5.1 Distribuição Uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2719.5.2 Distribuição Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2739.5.3 Distribuição de Pareto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276
9.6 Distribuição Normal ou Gaussiana . . . . . . . . . . . . . . . . . . . . . . . . . . . 2819.6.1 Distribuição Gama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
9.7 Integrais de Funções Descontínuas . . . . . . . . . . . . . . . . . . . . . . . . . . . 2859.8 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
Bibliografia Básica 295

10 CONTEÚDO

Capítulo 1
COMANDOS BÁSICOS DO MAPLE
1.1 Introdução
O MAPLE é um tipo de software, pertecente a uma classe chamada de computação simbólicaou algébrica, dirigido para a resolução de diversos problemas emMatemática e outras Ciênciasafins.
Uma das principais características doMAPLE é permitir manipulações numéricas e simbólicas,além de gerar gráficos em dimensão 2 e 3. As manipulações simbólicas são operações do tipo- expressar uma variável em função de outra, substituição, simplificação, fatoração, reagrupa-mentos dos termos de uma expressão, etc. A capacidade simbólica do software, permite obtersoluções exatas em diversos tipos de problemas.
O MAPLE consiste de três partes principais, a saber: o núcleo (kernel), que é a parte central dosoftware, escrita em linguagem C , onde são realizadas as operações; as livrarias (packages), quesão um conjunto de funções pré-definidas e que são acionadas por uma sintaxe própria, quandonecessário; e finalmente, a interface do usuário, chamada folha de trabalho (worksheet), ondese realizam as operações de entrada e saída. O MAPLE tem, essencialmente, dois tipos decomandos: os que utilizam o núcleo e os comando da interface do usuário.
O MAPLE é uma ferramenta poderosa que serve não somente para testar os conhecimentosde Cálculo I, como também abrange muitas áreas da Matemática. Nestas notas nos concentra-remos, essencialmente, na parte básica do software, direcionado exclusivamente ao Cálculo defunções de uma variável real. As sintaxes apresentadas nestas notas correspondem às versõesdo MAPLE 5 em diante.
Recomendamos que, ao ler os capítulos, já esteja instalado o MAPLE para reproduzir os exem-plos e os exercícios.
Finalmente, observamos que é recomendável a utilização de recursos computacionais, noapoio ao ensino do Cálculo, é recomendável, mas isso não exclui, de forma alguma, a abor-dagem do aprendizado teórico em sala de aula, o qual sempre se mostrou indispensável.A utilização do MAPLE no Cálculo é um ótimo laboratório para testar e esclarecer muitosconceitos estudados em sala de aula. Veja o último parágrafo deste capítulo.
11

12 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
1.2 Início
Após o início do software, a digitação das expressões serão feita ao lado do prompt :
>
Isto é, quando aparecer o prompt, implica em que o MAPLE está pronto para receber os co-mandos.
A sintaxe de todo comando do MAPLE deve terminar em ponto e vírgula:
>expressão;
Ou dois pontos:
>expressão:
Utilizamos ";” (ponto e vírgula) quando desejamos que o resultado seja mostrado imediata-mente na tela. Utilizamos ":” (dois pontos) quando desejamos que o MAPLE execute o co-mando e o resultado seja guardado na memória, sem mostrá-lo na tela. A execução da sintaxedo comando após ";” ou ":” é finalizada pressionando a tecla enter.
Em geral, é conveniente, ao início de cada exercício, utilizar o comando:
>restart;
Este comando apaga da memória os comandos utilizados anteriormente, porém, não apaga oque já foi digitado no worksheet.
É possível guardar os dados digitados, enviando-os para um arquivo de extensão *.mws, oqual poderá ser lido pelo MAPLE em outra ocasião.
1.3 Operações e Números Pré-Definidos
Alguns dos comandos básicos para diversas operações pré-definidas do MAPLE são:
Adição: +
Subtração: -
Multiplicação: *
Divisão: /
Potenciação: ˆ
Fatorial de um número natural: !
Maior e menor que: > e <
Maior ou igual e menor ou igual que: >= e <=
Diferente de: <>

1.3. OPERAÇÕES E NÚMEROS PRÉ-DEFINIDOS 13
Máximo divisor comum: igcd(a,b,c,...)
Mínimo múltiplo comum: ilcm(a,b,c,...)
Menor inteiro maior ou igual a x: ceil(x)
Parte inteira de x: trunc(x)
Parte fracionária de x: frac(x)
O MAPLE tem os seguintes números pré-definidos:
O número π é definido por: Pi
O número e é definido por: exp(1)
A unidade imaginária é definida por: I
Notamos que o Maple utiliza para os decimais ".” ponto. Por exemplo:3
7é denotado na forma
decimal 0.428571.
Exemplo 1.1.
1. Para calcular 3 × 71/9 + 113 − 1. Devemos digitar:
> 3*7 ˆ(1/9) +11 ˆ 3 -1;
39√
7 + 1330
2. Para calcular5π − 1
3. Devemos digitar:
> (5*Pi-1)/3;
5π − 1
3
Devemos ter cuidado nos parênteses utilizados na construção de uma expressão. No exem-plo anterior, o resultado será diferente se digitarmos:
> 5*Pi-1/3;
5π − 1
3
Logo, o resultado será diferente.
3. Determine o máximo divisor comum de 6 e 26 e mínimo múltiplo comum de 5 e 24.
Escrevemos:

14 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
> igcd(6,26);
2
Analogamente, escrevemos:
> ilcm(5,24);
120
4. Determine o menor inteiro maior ou igual a 5.3 e a parte inteira de 223.34.
Escrevemos:
> ceil(5.3);
6
Analogamente, escrevemos:
> trunc(223.34);
223
1.4 Funções Pré-Definidas
OMAPLE tem algumas funções elementares e transcendentes pré-definidas, por exemplo:
Valor absoluto de x, ( |x|): abs(x)Sinal de x, ( sgn(x)): csgn(x)
Omaior inteiro que é menor ou igual a x, ( [[x]]): floor(x)
Raiz quadrada de x, (√
x): sqrt(x)
Raiz n-ésima de x, ( n√
x): root(x,n )
Exponencial de x, ( ex): exp(x)
Logaritmo natural de x, (ln(x)): ln(x)
Logaritmo na base 10 de x, (log(x)): log(x)
Logaritmo na base b de x, (logb(x)): log[b](x)
Funções Trigonométricas:
sin(x), cos(x), tan(x), cot(x), sec(x), csc(x)

1.4. FUNÇÕES PRÉ-DEFINIDAS 15
.
Onde x, é em radianos.
Funções Trigonométricas Inversas:
arcsin(x), arccos(x), arctan(x), arccot(x), arcsec(x), arcsc(x)
Funções Trigonométricas Hiperbólicas:
sinh(x), cosh(x), tanh(x), coth(x), sech(x), csch(x)
Funções Trigonométricas Hiperbólicas Inversas:
arcsinh(x), arccosh(x), arctanh(x), arccoth(x), arcsech(x), arcsch(x)
Exemplo 1.2.
1. Determine o valor de tg(4π
3). Devemos digitar:
> tan(4*Pi/3);√
3
2. Determine o valor de 4 sen(π
3) − sec2(
π
4). Devemos digitar:
> 4*sin(Pi/3)-sec(Pi/4) ˆ 2;
2√
3 − 2
3. Determine o valor de arcsen(1) − arctan(1) + sech(4). Devemos digitar:
> arcsin(1)-arctan(1)+sech(4);π
2+ sech(2)
4. Determine o valor de log5(3) + ln(5) + log(1
2). Devemos digitar:
> log[5](3)+ln(5)+log(1/2);
ln(3)
ln(5)+ ln(5) − ln(2)
Pode explicar este resultado?
5. Determine o valor de [[π + 70√
12929 + e5]]. Devemos digitar:
> floor(Pi+root(12929, 70)+exp(5));
152
16 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
1.5 Cálculos Aproximados
Para efetuar cálculos aproximados no MAPLE, utilizaremos o comando:
> evalf(expressão, digitos );
Ou, alternativamente:
> evalf[digitos ] (expressão);
O comando evalf expressa o valor aproximado na forma de número decimal com um total de10 digítos, se não é indicado o números de digitos. Podemos alterar o número de digítos daresposta, como mostram os exemplos a seguir:
Exemplo 1.3.
1. Determine o valor aproximado de π. Devemos digitar:
> evalf(Pi);
3.141592654
Se desejamos mais digítos na aproximação, por exemplo 100, escrevemos:
> evalf[100](Pi);
3.141592653589793238462643383279502884197169399375105820974944592307816406286208998628034825342117068
2. Determine o valor aproximado de 43√
5 +17
3+ e 5
√456 − [[ln(453)]]. Devemos digitar:
> evalf(4 ˆ 3*sqrt(5)+17/3 +exp(1)*root(456, 5)-floor(ln(453)));
152.0238611
Para obter o resultado com 30 digítos:
>evalf(4ˆ3*sqrt(5)+17/3 +exp(1)*root(456, 5)-floor(ln(453)),30);
152.023861144905348681717678473
3. Determine o valor aproximado de 4 sen(π
3) − sec2(
π
4). Devemos digitar:
> evalf(4*sin(Pi/3)-sec(Pi/4) ˆ 2) ;
1.464101616

1.6. MANIPULAÇÕES ALGÉBRICAS 17
4. Determine o valor aproximado de log5(3) + ln(5) + log(1
2). Devemos digitar:
> evalf(log[5](3)+ln(5)+log(1/2));
1.598896926
1.6 Manipulações Algébricas
Como foi comentado no início do capítulo, o MAPLE aceita também expressões algébricas.Os seguintes comandos são utilizados para manipulações de expressões numéricas e/ou algé-bricas:
Desenvolver uma expressão: expand( )
Fatore uma expressão: factor( )
Simplifique uma expressão: simplify( )
Decompor um número em fatores primos: ifactor( )
Estes comandos possuem algumas opções adicionais. Por exemplo:
> expand(expressão, opção);
Os argumentos desta sintaxe são: trig, exp, ln , power ou radical. Outras opções podem serconsultadas, utilizando >?sintaxe.
Exemplo 1.4.
1. Desenvolver (x2 + 4)4. Devemos escrever:
> expand((x ˆ 2 +4)ˆ4);
x8 + 16x6 + 96x4 + 256x2 + 256
2. Desenvolver sen(2x). Devemos escrever:
> expand(sin(2*x));
sen(2x)
Agora, se digitamos:
> expand(sin(2*x),trig);
2 sin(x) cos(x)
3. Desenvolver cosh(x + y). Devemos escrever:
> expand(cosh(x+y),exp);

18 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
cosh(x) cosh (y) + sinh(x) sinh(y)
Procure outras formas de utilizar este comando, digitando >?sintaxe.
4. Desenvolver sen(ω (x − x0) + α). Se escrevemos:
>expand(sin(omega*(x-x0)+alpha));
sin(ω x) cos(ω x0 ) cos(α) + sin(ω x) sin(ω x0 ) sin(α) − cos(ω x) sin(ω x0 ) cos(α)+cos(ω x) cos(ω x0 ) sin(α)
Agora, se escrevemos:
>expand(sin(omega*(x-x0 )+alpha),x-x0 );
sin(ω (x − x0 )) cos(α) + cos(ω (x − x0 )) sin(α)
5. Fatore x6 − 4096. Devemos escrever:
> factor(x ˆ 6 -4096);
(x − 4) (x + 4) (x2 + 4x + 16) (x2 − 4x + 16)
6. Simplifiquex6 − 4096
x4 − 16. Devemos escrever:
> simplify((x ˆ 6 -4096))/(xˆ4 -16);
x4 + 16x2 + 256
7. Simplifique cosh2(x) − senh(x)2. Devemos escrever:
> simplify(cosh(x) ˆ 2 -sinh(x) ˆ 2);
1
Explique este resultado.
8. Desenvolver sen(x + y). Devemos escrever:
> expand(sin(x+y));
sin(x) cos(y) + cos(x) sin(y)
9. Decompor em fatores primos 3628800. Devemos escrever:
> ifactor(3628800);

1.6. MANIPULAÇÕES ALGÉBRICAS 19
((2))8 ((3))4 ((5))2 (7)
Em geral, oMAPLE não assume, a priori, o domínio das variáveis, numa expressão. Vejamoso exemplo a seguir.
Exemplo 1.5.
1. Digite a seguinte expressão:
> sin(4*Pi*n);
sin(4π n)
O MAPLE não lançou o resultado igual a zero. Isto é devido ao fato de que o MAPLE supõeque n é uma variável independente e não necessariamente um número inteiro.
Utilizamos a seguinte sintaxe, para definir o domínio de uma variável:
> assume(variável, opção);
O tipo pode ser inteiro (integer), real (real) ou por exemplo:
> assume(variável>0);
No exemplo anterior:
> assume(n,integer);
> sin(4*Pi*n);
0
> cos(Pi*n);
(−1)n
2. Simplifique√
x2 y2, se x e y são números positivos.
> simplify(sqrt(x ˆ 2 y ˆ 2), assume=nonneg);
x y
Também podemos utilizar:
> assume(variável1 >0, variável2 >0,....):
Quando se tratar de funções que envolvem logarítmos. Por exemplo:
3. Desenvolver ln(y
x
)
. Devemos digitar:

20 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
>assume(x>0,y>0):
> expand(ln(x/y);
ln(x) − ln(y)
4. Simplifique ln(ex). Digitamos:
>assume(x, real):
> simplify(ln(exp(x)));
x
Outro comando de manipulação algébrica é o combine que produz o efeito inverso do co-mando expand, o qual combina diversas expressões para conseguir uma mais reduzida. Aoutilizar este comando, é nescesário indicar, como argumento, que tipo de elementos se desejacombinar. A sintaxe é:
> combine(expressão, opção);
Ou, equivalentemente:
> combine[opção] (expressão);
As opções desta sintaxe são: trig, exp, ln , power ou radical.
Exemplo 1.6.
1. Digite:
> combine(2*sin(x)*cos(x),trig);
sin(2x)
2. Digite:
> combine(exp(x)*exp(y),exp);
exy
3. Digite:
> combine(x ˆ y /x ˆ 2 ,power);
xy−2
4. Digite:
>combine[radical](sqrt(27)*sqrt(10)*sqrt(31)+sqrt(10)*sqrt(x ˆ 2 +1);
3√
930 +√
10x2 + 10

1.7. EQUAÇÕES, INEQUAÇÕES E SISTEMAS DE EQUAÇÕES 21
1.7 Equações, Inequações e Sistemas de Equações
Para resolver equações, inequações, sistemas lineares, utilizamos o comando solve.
Para equações em uma variável:
> solve(equação, variável);
Para equações ou sistemas de equações de mais de uma variável, a sintaxe do comando deveincluir as variáveis que desejamos determinar. Quando desejamos resolver um sistema a sin-taxe é:
> solve({equação1,equação2,.....}, {variável1,variável2,......});
Este comando também é utilizado quando, numa equação com mais de uma variável, deseja-mos expressar uma delas em função das outras.
Para determinar as soluções inteiras de uma equação, utilizamos a seguinte sintaxe:
>isolve(equação);
Quando se deseja obter o resultado aproximado de uma equação ou sistema utilizamos a sin-taxe:
> fsolve(equação,variável, opções);
ou
> fsolve({equação1 ,equação2,....},{variável1, variável2, ....}, opções);
A opçãomais utilizada, nesta sintaxe, é o intervalo onde se deseja achar a soluação aproximada.
Exemplo 1.7.
1. Determine a solução de x3 − 7x2 + 4x + 12 = 0. Devemos escrever:
>solve((x ˆ 3 -7*x ˆ 2 +4*x +12,{x});
{x = −1}, {x = 2}, {x = 6}
2. Determine a solução de x2 − 3x y + 2 y2 = 0 em função de y. Devemos escrever:
>solve((x ˆ 2 -3*x*y+2*y ˆ 2 =0,{y});
{y = x}, {y =x
2}
3. Determine a solução do sistema:

22 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
{
5x − 3 y = 1
−2x + 8 y = 9.
Digite:
>solve(({5*x-3*y=1,-2*x+8*y=9},{x,y});
{x =35
34}, {y =
47
34}
Podemos aproximar as soluções:
>solve(({5*x-3*y=1,-2*x+8*y=9},{x,y}):
>evalf(%)
{x = 1.029411765}, {y = 1.382352941}
Utilizamos o comando % para chamar a expressão imediatamente anterior sem repetir adigitação. Este comando é muito útil quando se manipula expressões muito complicadase/ou extensas. Analogamente, o comando % % representa o penúltimo resultado.
4. Determine a solução de |x + |x + 2|2 − 1| > 9. Devemos digitar:
>solve(abs(x+abs(x+2)ˆ 2 -1)>9,x);
RealRange (Open (1) ,∞) , RealRange (−∞,Open (−6))
Isto é, (−∞,−6) ∪ (1,+∞).
5. Determine a solução de x∣
∣x3 − 3x2 − 9x + 27∣
∣ < 0. Devemos digitar:
>solve(x *abs(xˆ3 -3*x ˆ2+9*x+27) <0,x);
RealRange(Open(0), Open(3)), RealRange(Open(3), infinity), RealRange(Open(-3), Open(0)),RealRange(-infinity, Open(-3))
Isto é, (−∞,−3) ∪ (−3, 0) ∪ (0, 3) ∪ (3,+∞).
6. Determine a solução de x2 − 36x + 100 = 0, no intervalo [−20, 20]. Devemos digitar:
>fsolve(x ˆ 2 -36*x+100=0,{x},x=-20..20);
{3.0033370453}
7. Determine as soluções inteiras de: x4 +5x3
6− 7x2
3+
x
6+
1
3= 0. Devemos digitar:
>isolve(xˆ 4+(5/6)*xˆ3-(7/3)*xˆ2+(1/6)*x+1/3);

1.7. EQUAÇÕES, INEQUAÇÕES E SISTEMAS DE EQUAÇÕES 23
{x = −2}, {x = 1}Note que:
>solve(xˆ 4+(5/6)*x ˆ 3-(7/3)*xˆ2+(1/6)*x+1/3,{x});
{x = −2}, {x = 1}, {x =1
2}, {x = −1
3}
8. Determine a solução do sistema:{
sen(x + y) − ex y = 0
x − y = 1;
se (x, y) ∈ [−2, 2] × [−2, 2].
Digitemos:
>fsolve({sin(x+y)-exp(x) * y=0,x-y=1},{x,y},{x=-2..2,y=-2..2});
{x = 1.278443473, y = −0.2784434726}
O Maple ocasionalmente, lança soluções em função da expressão RootOf. Vejamos o seguinteexemplo:
Exemplo 1.8.
Digitemos:
> solve(x ˆ 5 - 2*x + 3 = 0,x);
{x = RootOf(_Z5 − 2_Z + 3; index = 1)},{x = RootOf(_Z5 − 2_Z + 3; index = 2)},{x = RootOf(_Z5 − 2_Z + 3; index = 3)},{x = RootOf(_Z5 − 2_Z + 3; index = 4)},{x = RootOf(_Z5 − 2_Z + 3; index = 5)}
RootOf(expressão) é a forma genérica das raízes do polinômio. Isto indica que x é uma raizdo polinômio z5 − 2 z + 3, onde index é o número e a ordem da solução Para obter soluçõesexplícitas, complexas, utilizamos a sintaxe:
> evalf(%);
{x = .9585321812+.4984277790*I}, {x = -.2467292569+1.320816347*I}, {x = -1.423605849},{x = -.2467292569-1.320816347*I}, {x = .9585321812-.4984277790*I}
Estas são as 5 raizes da equação. As soluções da equação, onde aparece o símbolo I, são assoluções que não são reais.

24 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
Para obter todas as soluções de uma equação equação, especialmente, as trigonometricas, uti-lizamos a seguinte sintaxe:
>solve(equação,variável,AllSolutions);
Exemplo 1.9.
1. Determine a solução de sen(x) = 0.
>solve(sin(x)=0,x);
0
Digitamos:
>solve(sin(x)=0,{x},AllSolutions);
{x = π _Z5 ˜}
Isto equivale a:
x = k π, k ∈ Z
2. Determine a solução de cos(x) +
√3
2= 0.
>solve(cos(x)+sqrt(3)/2=0,x);
5
6π
Digitamos:
>solve(cos(x)+sqrt(3)/2=0,{x},AllSolutions);
{x =5
6π − 5
3π__B2 ˜ + 2π_Z2 ˜}
Isto equivale a:
x =5π
6+ 2 k π, x = −5π
3+ 2 k π, m, k ∈ Z
3. Determine a solução de cos(4x) + sen(2x) = 0.
>solve(cos(4*x)+sin(2*x)=0,x,AllSolutions);
1
4π + π _Z1 ˜, − 1
12π + π _Z2 ˜, − 5
12π + π _Z3 ˜
Interprete o resultado.

1.8. NOMEAÇÃO DE OBJETOS E SUBSTITUIÇÕES 25
1.8 Nomeação de Objetos e Substituições
Quando necessitamos utilizar seguidamente uma expressão e/ou valor numérico, podemosnomeá-los, evitando assim digitá-los repetidamente.
A sintaxe para isto é:
:= (dois pontos e igual)
Para substituir os valores numa expressão já definida, utilizamos a seguinte sintaxe:
> subs(objeto a substituir, expressão);
Exemplo 1.10.
1. Se digitamos:
> eq1:=x+y-3=0;
eq1 := x + y − 3 = 0
Podemos chamar a expressão anterior, fazendo:
> eq1;
x + y − 3 = 0
Ou, resolvê-la:
> solve(eq1,{x});
{x = −y + 3}2. Num sistema de equações, podemos nomeá-las como:
> eq1:=3 *x-5*y+z=1 :
> eq2:=x+3*y-z=5:
> eq3:=-x-y+z=1:
Escrevemos:
> solve({eq1,eq2,eq3 },{x,y,z});}
{x = 3, y = 3, z = 7}
3. Escreva a seguinte sequência de comandos:

26 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
> eq1:=a*x ˆ 2 +b * x+c;
ax2 + b x + c
> sol:=solve(eq1=0,x);
{x =1
2
−b +√
b2 − 4 a c
a} {x =
1
2
−b −√
b2 − 4 a c
a}
> sol[1];
{x =1
2
−b +√
b2 − 4 a c
a}
Interprete a sequência de comando e faça > sol[2];.
4. Substitua no exemplo anterior os valores a = 1, b = 5 e c = 3. Devemos digitar:
> subs(a=1,b=5,c=3,eq1);
x2 + 5x + 3
5. Determine a solução de:
x5 − x4e − 23x4
8+
23 e x3
8− 179x3
8+
179 e x2
8+
85x2
4− 85 e x
4+ 3x − 3 e = 0;
Devemos digitar:
>eq:=x ˆ 5-x ˆ 4*exp(1)-(23/8)*x ˆ 4+(23/8)*x ˆ 3*exp(1)-(179/8)*x ˆ 3++(179/8)*x ˆ 2*exp(1)+(85/4)*x ˆ 2-(85/4)*x*exp(1)+3*x-3*exp(1) = 0):
>sol:=solve(eq,{x});
{x = 1}, {x = −1
8}, {x = 6}, {x = −4}, {x = e}
>sol[1],sol[4]
{x = 1}, {x = −4}
6. Determine a solução do sistema:
x2 + y2 + z2 = 1
x − y + 2 z = −1
x y + y z + x z = 0
.
Devemos digitar:
>eq1:=x ˆ 2 +y ˆ 2 +z ˆ 2 =1:
>eq2:=x-y+2 *z=-1:

1.8. NOMEAÇÃO DE OBJETOS E SUBSTITUIÇÕES 27
>eq3:=x*y+y*z+z*x=-1:
>solve({eq1,eq2,eq3},{x,y,z});
{x = −3
2∗ RootOf(7 * _Z ˆ 2-3) +
1
2, y =
1
2∗ RootOf(7 * _Z ˆ 2 -3) +
3
2, z = RootOf(7* _ Z ˆ 2- 3)},
{x = −3
2− 3
2∗ RootOf(7* _ Z ˆ 2 +8 * _ Z-3), y = −1
2+
1
2∗ RootOf(7* _Z ˆ 2+8*_Z-3),
z = RootOf(7*_ Z ˆ 2+8*_Z-3)}
evalf(%);
{x = −.4819805066, y = 1.827326836, z = .6546536711},
{x = −1.946306256, y = −.3512312478, z = .2975375043}
Para verificar que os resultados obtidos pelo MAPLE são, realmente, soluções de uma equaçãoe/ou um sistema de equações, utilizamos a seguinte sintaxe:
>eq:=equação:
>sol:=solve(eq,variável);
>subs(variável=sol[i],eq);
Exemplo 1.11.
1. Determine as soluções de x4 + x3 − 7x2 − x + 6 = 0. Devemos digitar:
>xˆ 4+xˆ 3-7*xˆ 2-x+6 = 0:
>sol:=solve(eq,x);
sol := 2, −1, 1, −3
subs(x=sol[1],eq);
0 = 0
subs(x=sol[3],eq);
0 = 0

28 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
1.9 Livrarias
Uma das características do MAPLE são suas livrarias (packages). As livrarias são pacotes de co-mados especiais, utilizados para resolver tipos especificos de problemas. Por exemplo, o MA-PLE possui livrarias especificas, para Gráficos, Geometria, Álgebra Linear, Álgebra Vetorial,etc. O MAPLE possui em torno de 2000 comandos; somente os mais importantes são carrega-dos automaticamente na memória. No ato de executar o programa os outros comandos ficamnas livrarias. As livrarias são agrupadas por temas e podem ser carregadas, individualmente,ou uma função só. Para usuários avançados é possível criar suas próprias livrarias.
A sintaxe para ativar uma livraria na memória, é:
> with(livraria):
A sintaxe para ver o conteúdo das livrarias é:
> with(livraria);
No decorrer do texto, apresentaremos as livrarias mais utilizadas em Cálculo em uma Variável.
1.9.1 Livraria - RealDomain
Em geral, o MAPLE trabalha com os números complexos. A livraria RealDomain faz com queo MAPLE trabalhe somente com os números reais.
Primeiramente, vejamos o conteúdo da livraria:
>with(RealDomain);
[Im,Re, ˆ,arccos,arccosh,arccot,arccoth,arccsc,arccsch,arcsec,arcsech,arcsin,arcsinh,arctan,arctanh,cos,cosh,cot, coth,csc,csch,eval,exp,expand,limit,ln ,log,sec,sech,signum,simplify,sin,sinh, solve,sqrt,surd,tan,tanh]
Isto nos indica que quando digitamos a sintaxe:
>with(RealDomain):
Todos os comandos da livraria, de acima, assumirão que os cálculos serão efetuado em R.
Exemplo 1.12.
Nos exemplos abaixo os comandos são dados, primeiramente, sem usar a livraria RealDomain.Veremos que obtemos respostas não reais (complexas).
1. Simplifique√
x4:
>simplify(sqrt(x ˆ 4));
csgn(x2)x2

1.9. LIVRARIAS 29
onde, csgn (x) é o sinal de x.
2. Simplifique (−4913)1/3:
>simplify(root(-4913,3));
17
2+
17
2I√
3
3. Resolva x3 − y = 1 para x.
>solve(x ˆ 3 -y=1,x);
(y + 1)1/3, −1
2(y + 1)1/3 +
1
2I√
3 (y + 1)1/3, −1
2(y + 1)1/3 − 1
2I√
3 (y + 1)1/3
Se utilizamos a livraria:
>with(RealDomain):
>simplify(sqrt(x ˆ 4));
x2
>simplify(root(-4913,3));
−17
>solve(x ˆ 3 -y=1,x);
(y + 1)1/3
Pode explicar estes resultados?
3. Se, digitamos:
>solve(xˆ5 -3*x+25=0,{x});
{x = RootOf(_ Z ˆ 5-3*_ Z+25, index = 1)}, {x = RootOf(_ Z ˆ 5-3*_ Z+25, index = 2)},{x = RootOf(_ Z ˆ 5-3*_ Z+25, index = 3)}, {x = RootOf(_ Z ˆ 5-3*_ Z+25, index = 4)},{x = RootOf(_ Z ˆ 5-3*_ Z+25, index = 5)}
Se, digitamos:
>with(RealDomaine):
>solve(xˆ5 -3*x+25=0,{x});
{x = RootOf (_Z 5 − 3 _Z + 25,−1.986834074)t}evalf(%);
{x = −1.986834073}

30 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
1.10 Conjuntos e Sequências
Para definir conjuntos se utiliza a seguinte sintaxe:
> {a, b, c,....};
{a, b, c, . . .}A sintaxe das operações de conjuntos são as seguintes:
União: union
Interseção: intersect
Diferença: minus
Subconjunto: subset
A sintaxe para gerar sequências de objetos é:
>seq(r(i),i=a..b);
O comando gera uma sequência, aplicando a cada i a fórmula r(i). Se i ∈ X, onde X é umconjunto, utlizamos a sintaxe:
>seq(r(i),i in X);
Como veremos nas próximas seções, esta sintaxe será associada a outras situções um poucodiferentes de aquelas que geraram seqûencias numéricas.
Exemplo 1.13.
1. Sejam A = {a, b c, d} e B = {a, c, e, f, g}. Determine A ∪ B, A ∩ B e A − B.
Escrevemos:
> A:={a, b, c, d};
A := {a, b c, d}> B:={a, c, e, f, g};
B := {a, c, e, f, g}Então:
>X:= A union B;
X := {a, b, c, d, e, f, g}>Y:= A intersect B;

1.10. CONJUNTOS E SEQUÊNCIAS 31
Y := {a, c}>Z:= A minus B;
Z := {b, d}Observe que:
>X subset Y;
false
e
>Y subset X;
true
Interprete estes últimos resultados.
2. Gere os 10 primeiros termos da sequência r(i) =1
i2, i ∈ N.
>seq(1/iˆ 2,i=1..20);
1,1
4,
1
9,
1
16
1
25
1
36,
1
49
1
64
1
81
1
100
3. Gere os termos da sequência:
r(i) =2 i
i2 + 1,
se i ∈ X, onde X = {−20,−10,−1, 0, 20, 300}.
>X:= {-20,-10,-1,0,20,300}:
>seq(2*1/(iˆ 2 +1),i in X);
− 40
401, − 20
101, −1, 0,
40
401,
600
90001

32 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
1.11 Exercícios
1. Determine os valores de x tais que:
(a)√
x2 = x
(b)√
(x − 1)2 = x − 1
(c)√
x2 − 2x + 1 = 1 − x
(d)√
x4 = x2
(e) |x + 1| = |x − 1|(f) |x − 1|2 = |2x − 1|(g) |x| = |x + 7|(h) |x − 1|2 = |2x + 1|
2. Verifique se é verdadeiro ou falso, dando um exemplo no caso de a resposta ser falso:
(a) Para todo x, y e z: |x + y + z| = |x| + |y| + |z| e(b) Para todo x e y: |x − y| ≤ |x| − |y|.
3. Determine as constantes A, B e C tais que:
(a)2x + 1
1 − x2=
A
1 + x+
B
1 − x.
(b)1
(x + 2)(2x + 1)=
A
x + 2+
B
2x + 1.
(c)1
(x + 2)(x2 − 1)=
A
x + 2+
B
x + 1+
C
x − 11.
4. Determine o quociente e o resto das divisões:
(a) 3x4 − 5x2 + 6x + 1 ÷ x2 − 3x + 4.
(b) 5x5 − 4x3 − 2x + 1 ÷ x + 1.
(c) x11 − 1 ÷ x + 1.
(d) x5 + 12x4 + 3x2 − 16 ÷ x2 + 3x − 4.
(e) x3 − 3x2 + 2x + 1 ÷ x2 − x + 1.
5. Determine as constantes a e b de modo que o polinômio P (x) seja divisível por Q(x),onde:
(a) P (x) = x4 − 3x3 + ax + b, Q(x) = x2 − 2x + 4.
(b) P (x) = 6x4 − 7x3 + ax2 + 3x + 2, Q(x) = x2 − x + b.
(c) P (x) = 8x3 − 10x2 + ax + b, Q(x) = 2x3 − 3x + 2.
(d) P (x) = 3x3 + ax2 − 7x + b, Q(x) = x2 − 5x + 1.
6. Ache a solução das seguintes desigualdades e represente no eixo coordenado o conjuntosolução:

1.11. EXERCÍCIOS 33
(a) x4 − x2 < 0
(b) x2 − 2 ≥ x
(c) x2 + x > 2
(d) (x − 5)4 (x + 10) ≤ 0
(e) |x + 2| < 1
(f) |x − 5| < |x + 1|(g) 4x2 + 10x − 6 < 0
(h) |x − 1|2 < |2x + 1|(i)
3x − 5
2x + 4> 1
(j) |x2 − 1||x + 1| > 0
(k) 2x2 − 2 ≤ x2 − x
(l) |x − 1| + |x − 2| > |10x − 1|(m) x2 − 7x + 8 > (x − 6)2
(n) |x2 − x − 1| < 2
(o)|x2 − 5x + 4|
|x2 − 4| < 1
(p) |x − 1| + |x + 2| ≥ |x − 2|2
(q) |x + 1| + |x + 2| > |10x − 1|(r) |x2 − 1| < |x − 1|
7. Determine o conjunto-solução de:
(a)
{
3x − 2 < x
6x − 4 > 3 − x
(b)
{
x + 3 ≤ 5
x + 3 ≤ 2x
(c)
5x + 1 ≤ 3x
2+ 5
2 (x + 3) ≥ x
(d)
{
5x − 3 < 6 + 2x
3 − 2x > 4
(e)
{
3x − 15 < x − 5
2 − x ≥ 6
(f)
{
x + 3 > 0
x2 + x − 2 < 0
8. Esboce as regiões determinadas por:
(a) x − 2y − 3 > 0
(b) 2x + y > 5
(c) 2x − 3y ≤ −1
(d) 3x − 2y ≤ 13
(e)x + y
x − 2y + 3< 0
(f) x2 + y2 − 2x − 2 y + 1 ≥ 0
9. Esboce as regiões da solução de:
(a)
{
2x − y < 3
x + y < 3
(b)
{
x + y < 2
2 y − 2x > 4
(c)
x + y < 120
3 y − x ≤ 0
x ≤ 100
y ≤ 100
(d)
x + y > 2
−2x + y ≤ 1
−x + 2 y ≥ −3

34 CAPÍTULO 1. COMANDOS BÁSICOS DO MAPLE
10. Obter o valor simplificado de:
(a) sen(
θ +π
2
)
(b) cos(
θ +3π
2
)
(c) sec(θ + 6π)
(d) sen(θ + 360π)
(e) cos(θ + 480π)
(f) sen(
θ − 3π
2
)
cos(
θ +π
2
)
11. Resolva as inequações:
(a) sen(x) + cos(x) ≥√
2
2(b) |tg(x)| ≥
√3
(c) sen2(x) ≥ 1
(d) sen2(x) ≥ 1
2se x ∈ [0, π]

Capítulo 2
FUNÇÕES DE UMA VARIÁVEL
A sintaxe para definir funções de uma variável é a seguinte:
> f:=x-> expressão;
Exemplo 2.1.
1. Se f(x) = x2 sen(x) + 3 cos(x), calcule f(π
2) e f(π). Escrevemos:
>f:=x->x ˆ 2*sin(x)+3*cos(x);
f := x −→ x2 sin(x) + 3 cos(x)
Logo:
>f(Pi/2);
π2
4
e
>f(Pi);
−3
2. Se f(x) = e3x − 2 ln(5x) + log4(x), calcule o valor aproximado de f(1
2) e f(2). Escrevemos:
>f:=x->exp(3*x)-2*ln(5*x)+log[4](x);
f := x −→ e3x − 2 ln(5x) + log4(x)
Logo:
35

36 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
>evalf(f(1/2));
5.367983431
e
>evalf(f(2));
402.5424991
3. Defina a função racional f(x) =x2 + 3x − 1
x3 − x2 + x + 3, calcule f(1) e fatore f(a) − f(a−1).
Escrevemos:
> f:=x->(x ˆ 2 +3*x-1)/(x ˆ 3 -x ˆ 2 +x+3);
f := x 7→ x2 + 3x − 1
x3 − x2 + x + 3
>f(1);
3
4
>factor(f(a)-f(1/a));
− (a2 − 8 a + 1)(a2 − a + 1)
(3 a2 − 2 a + 1)(a2 − 2 a + 3)
OMAPLE não simplifica uma expressão automaticamente, somente quando reconhece fato-res comuns.
2.1 Tabelas
Para fazer no Maple uma tabela de uma função, utilizamos a sintaxe abaixo, onde as entradassão os pontos do domínio e as saidas são os pontos da imagem:
>array( [seq( [i, f(i)], i = a..b) ] );
onde i ∈ Z. Caso desejamos que os valores de saida sejam aproximados, utilizamos a seguintesintaxe:
>array( [seq( [i, evalf(f(i))], i = a..b) ] );
Estas sintaxes produzem una sequência de valores verticais.

2.1. TABELAS 37
Exemplo 2.2.
1. Seja:
> f:=x->(x ˆ 2 +3*x-1)/(x ˆ 3 +x ˆ 2 +x+3);
f := x 7→ x2 + 3x − 1
x3 + x2 + x + 3
>array( [seq( [i, (f(i))], i = -5..5) ] );
−5 − 3
34
−4 − 3
49
−31
18
−2 1
−1 −3
2
0 −1
3
11
2
29
17
317
42
49
29
539
158
2. Seja:
>g:=x->exp(3*x)-2*ln(5*x)+log[4](x);
g := x −→ e3x − 2 ln(5x) + log4(x)
>array( [seq( [i, evalf(g(i))], i = 1..10) ] );

38 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
1 16.86666110
2 399.3236233
3 8098.460309
4 162749.7999
5 3269012.095
6 65659963.63
7 1318815728.0
8 26489122120.0
9 532048240600.0
10 10686474580000.0
3. Estude a função f(x) = x sen( 1
x2
)
, perto do zero:
>f:=x->x*sin(1/xˆ 2);
f := x 7→ x sin(x−2)
>X := {-1,-0.1,-0.001, -0.0001,-0.00001,0.00,1,0.1,0.001, 0.0001,0.00001}:
>array([seq([i, evalf(f(i), 4)], i in X)]) ;
−1 −0.8415
1 0.8415
−0.1 0.05064
−0.01 0.003056
−0.001 0.0003500
−0.0001 −0.00009316
−0.00001 0.000004875
0.0 Float(undefined)
0.00001 −0.000004875
0.0001 0.00009316
0.001 −0.0003500
0.01 −0.003056
0.1 −0.05064
Note que digitamo zero como 0.00; por que?

2.2. CONVERSÃO DE EXPRESSÕES EM FUNÇÕES 39
4. Seja h(x) = ex + ln(x2 + 1) cos(π x); faça uma tabela com os valores aproximados de:
h(−20), h(−10), h(−1), h(20), h(30), h(1
2) e h(, 4
√19).
>h:=x->exp(x)+ln(x ˆ 2+1)*cos(Pi*x):
>X:={-20, -10, -1, 20, 30, 1/2, root(19, 4)}:
>array([seq([i, evalf(f(i))], in (i, X))]);
−20 5.993961429
−10 4.615165917
−1 −0.3252677394
20 485165201.4
30 10686474580000.0
1/2 1.648721271
4√
19 9.682431939
2.2 Conversão de Expressões em Funções
Para converter uma expressão em função, utilizamos a sintaxe:
> unapply(expressão, variável);
Exemplo 2.3.
1. Suponha que temos a expressão:
> p:= x ˆ 3+x ˆ 2-5*x+1-x ˆ 2*y-y;
p := x3 + x2 − 5x + 1 − x2 y − y
> h:=solve(p=0,y);
x3 + x2 − 5x + 1
x2 + 1
Se desejamos, por exemplo, avaliar a expressão anterior para x = 0, isso não será possívelantes de converter a expressão em função, utilizando o comando unapply
g := unapply(h, x);
x → x3 + x2 − 5x + 1
x2 + 1
Agora podemos calcular, por exemplo:

40 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
>g(0),g(-1),g(1);
1, 3, −1
2. Suponha que temos a expressão:
> p:= b ˆ 2 * x ˆ 2 *sin(b*x)+2*b*x*cos(b*x);
p := b2x2 sin(b x) + 2 b x cos(b x)
f := unapply(p, x);
x → b2x2 sin(b x) + 2 b x cos(b x)
Agora podemos calcular, por exemplo:
>f(0),f(Pi/b);
10,−2π
2.3 Funções Definidas por Partes
É comum, nas aplicações, definir funções por partes. A sintaxe para definir funções por partesé:
>piecewise(x<a1,f1(x),x<a2,f2(x),....);
No caso de funções definidas por partes, em intervalos limitados, utilizamos a opção:
and
Por exemplo, se a ≤ x < b, escrevemos:
a <=x and x<b;
Exemplo 2.4.
1. Escreva a função f(x) =
{
−1 se x ≤ 1
1 se 1 < x.
Digitamos:
>piecewise(x<=1,-1,1<x,1);{
−1 x ≤ 1
1 1 < x
2. Escreva a função f(x) =
x se x ≤ 1
x + 2 se 1 < x ≤ 4
x se 4 < x
.

2.4. COMPOSTA DE FUNÇÕES 41
Digitamos:
>piecewise(x<=1,x,1<x and x<=4,x + 2,3<x,x);
x x ≤ 1
x + 2 1 < x and x ≤ 4
x 4 < x
3. Escreva a função f(x) =
x se x ≤ 1
x2 se 1 < x < 3√x se 3 < x < 6
x se 6 ≤ x
.
Digitamos:
>piecewise(x<=1,x,1<x and x<3,x ˆ 2,3<x and x<6,sqrt(x),x>=6,x);
x x ≤ 1
x2 1 < x and x < 3√x 3 < x and x < 6
x 6 ≤ x
2.4 Composta de Funções
Dadas f e g funções tais que Dom(g) ⊂ Im(f), podemos definir a composta:
g ◦ f
A sintaxe para obter a composta é feita com o operador @ (arroba). Logo, a composta de g e fé:
>g @ f;
Para fazer a composta de f consigo mesma n vezes, utilizamos a sintaxe:
>f @@ n;
Exemplo 2.5.
1. Dadas f(x) = ln(x) + 1 e g(x) = ex − 1; determine f ◦ g, g ◦ f e f ◦ f ◦ f ◦ f . Calcule(f ◦ f ◦ f ◦ f)(1).
Digitamos a seguinte sequência de comandos:
>f:=ln(x)+1:

42 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
>g:=exp(x)-1):
>h1:=f @g:
>h2:=g @f:
>h3:=f@@4:
Agora podemos calcular
>h1(x);
ln(ex − 1) + 1
>h2(x);
eln(x)+1 − 1
>simplify(%);
x e − 1
>h3(x);
ln(ln(ln(ln(x) + 1) + 1) + 1) + 1
>h3(1);
1
2. Dadas f(x) = 5x + 4 e g(x) =√
x2 + 1; determine f ◦ g, g ◦ f , f ◦ f ◦ f e f ◦ f ◦ g ◦ g ◦ g.
Digitamos a seguinte sequência de comandos:
>f:=5*x+4:
>g:=sqrt(x ˆ 2 +1):
>h1:=f @g:
>h2:=g @f:
>h3:=f@@3:
>h4:=(f @@2)@(g@@3):
Agora podemos calcular
>h1(x);
5√
x2 + 1 + 4
>h2(x);√
25x2 + 40x + 17

2.5. FUNÇÃO INVERSA 43
>h3(x);
125x + 124
>h4(x);
25√
x2 + 3 + 24
3. Se f(x) = x − 3, calcule f@10. Digitamos a seguinte sequência de comandos:
>f:=x-3:
>h:=f@@10:
>h(x);
x − 30
2.5 Função Inversa
A função inversa de f é definida por >f @@ (-1); mas o MAPLE somente calcula f−1 para asfunções pré-definidas.
Uma forma de determinar a inversa de uma função é:
>f:=x->expressão;
>solve(y=expressão,x);
>g:=unapply( % ,y);
Logo, g é a função inversa de f . Se for necessário, utilize:
>with(RealDomain):
Veja os exemplos.
Exemplo 2.6.
1. Determine a função inversa de f(x) = x3.
>with(RealDomain):
>f:=x->x ˆ 3;
f := x 7→ x3
>solve(y=f(x),x);
y1/3

44 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
>g:=unapply(% ,y);
g := y 7→ y1/3
simplify((g @ f)(x));
x
simplify((f @ g)(y));
y
2. Determine a função inversa de f(x) =ax + b
c x + d.
>f:=x->(a*x+b)/(c*x+d);
f := x 7→ ax + b
c x + d
>solve(y=f(x),x);
−−y d + b
−yc + a
>g:=unapply(% ,y);
g := y 7→ −−yd + b
−yc + a
simplify((g @ f)(x));
x
simplify((f @ g)(y));
y
3. Determine a função inversa de f(x) = ax2 + b x + c.
>f:=x->a*xˆ 2+b*x+c;
f := x 7→ ax2 + b x + c
>sol:=solve(f(x)=y,x);
1
2
−b +√
b2 − 4 ac + 4 ay
a, −1
2
b +√
b2 − 4 ac + 4 ay
a
>g1:=unapply(sol[1],y);

2.6. GRÁFICOS DE FUNÇÕES 45
g1 := y 7→ 1
2
−b +√
b2 − 4 ac + 4 ay
a
>assume(2*a*x+b>0):
Por que?
>simplify((f@g1)(y));
y
>simplify((g1@f)(x));
x
>restart;
>g2:=unapply(sol[2],y);
g2 := y 7→ −1
2
b +√
b2 − 4 ac + 4 ay
a
>assume(2*a*x+b<0):
Por que?
>simplify((f@g2)(y));
y
>simplify((g2@f)(x));
x
2.6 Gráficos de Funções
A sintaxe básica para o esboço do gráfico de uma função y = f(x) onde x ∈ [a, b] é:
> plot(f(x),x=a..b, opções);
A seguir apresentamos algumas destas opções:
Para indicar a variação da ordenada, ser for necessário, para uma melhor visualização do grá-fico, utilizamos: y=c..d
Para ver uma porção determinada do gráfico, utilizamos: view=[a. .b,c. .d]

46 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Para melhorar a resolução gráfica, onde n ≥ 50 é o número de pontos que vai gerar o gráfico,utilizamos: numpoints=n
Para usar a mesma escala em ambos os eixos, utilizamos: scaling=constrained
Para mudar a cor de um gráfico, utilizamos: color=c
c é a cor desejada. Alguns cores são: aquamarine, black, blue, coral, cyan, brown, gold, green,grey, khaki, magenta, maroon, navy, orange, pink, plum, red, sienna, tan, turquoise, violet,wheat, white, yellow.
Para mudar a espessura de um gráfico, utilizamos: thickness=n, n = 0, 1, 2, 3.
Para esboçar gráficos em intervalos que incluem pontos onde as funções não sejam definidas,evitando que sejam desenhadas linhas verticais nesses pontos, utilizamos: discont=true
Para esboçar os gráficos em diferentes estilos, utilizamos: style
Por exemplo, gráficos pontilhados: style=point
Para indicar o tipo de eixos, utilizamos: axes
Tipos de eixos : boxed, frame, none e normal.
Para incluir legendas no gráfico, utilizamos: legend
Quando se usa a opção style=point, onde s é o tipo de símbolo: cross, solidcircle, utilizamos:symbol=s
Exemplo 2.7.
1. Esboçe o gráfico de f(x) = x2 sen(x) + sen(10x) para x ∈ [−3, 3]. Escrevemos:
>f:=x->x ˆ 2*sin(x)+sin(10*x);
f := x −→ x2 sin(x) + sin(10x)
Logo:
>plot(f(x), x = -3 .. 3, color = blue, thickness = 3, numpoints = 100);

2.6. GRÁFICOS DE FUNÇÕES 47
Figura 2.1: .
2. Esboçe o gráfico de g(x) = ex/2 cos(4π x) para x ∈ [−4, 4]. Escrevemos:
>g:=x->exp(x/2)*cos(4*Pi*x);
g := x −→ ex/2 cos(4π x)
Logo:
>plot(g(x),x=-4..4, thickness = 3, numpoints = 100, axes = boxed);
Figura 2.2: .
3. Esboce o gráfico de h(x) =cos(π x)
x4 + x2 + 1, x ∈ [−4, 4]. Digitemos:
>h:=x->cos(Pi*x)/(x ˆ 4 +x ˆ 2 +1):
h := x 7→ cos(π x)
x4 + x2 + 1

48 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
>plot(h(x) ,x=-4..4,color=blue,numpoint=100,thickness=3);
Figura 2.3: .
4. Esboce o gráfico de tg(x). Digitemos:
>plot(tan(x),x=-2*Pi..2*Pi);
Figura 2.4: .
O MAPLE, traçou o gráfico de tg(x) em uma vizinhança de x = ±π/2, onde a função atingevalores muito grandes. Note que não foi especificado a variação do eixo das ordenadas.
Para contornar este problema, especificamos a variação do eixo dos y:
>plot(tan(x), x = -2*Pi .. 2*Pi, y = -10 .. 10, thickness = 2);

2.6. GRÁFICOS DE FUNÇÕES 49
Figura 2.5: .
Para não incluir as retas verticais, no gráfico, usamos a opção:
discont=true
>plot(tan(x), x = -2*Pi .. 2*Pi, y = -10 .. 10, color = blue, thickness = 3, discont = true);
Figura 2.6: .
4. Esboce o gráfico de f(x) =x3 cos(x)
x2 + 1, utilizando pontos.
>p3:=(xˆ 3 *cos(x))/(xˆ 2 +1):
>plot(p3, x = -10 .. 10, discont = true, color = magenta, style = point, symbol = solidcircle,
symbolsize = 10));

50 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.7:
5. Esboce o gráfico de f(x) = x2 sen(1
x
)
+ x2 cos(1
x
)
, em uma vizinhança de zero.
>p4:=xˆ 2 *sin(1/x)+xˆ 2*cos(1/x):
>plot(p3, x = -.3 .. .3, y = -0.2e-1 .. 0.5e-1, discont = true, color = blue, numpoints = 100,thickness = 2);
Figura 2.8:
Amelhor forma de aprender a utilizar todas as opções é digitar o seguinte comando para entrarno help do MAPLE e experimentar cada uma delas:
>?plot;
Outra forma de esboçar gráficos de funções, é utilizar a sintaxe:
> smartplot(função);

2.7. GRÁFICOS DE OUTROS TIPOS DE FUNÇÕES 51
O MAPLE esboça o gráfico da função num intervalo que, visualmente, é ótimo.
Exemplo 2.8.
1. Esboce o gráfico de sen(x) + cos(x) + sen(2x) cos(2x). Digitamos:
> smartplot(sin(x)+cos(x)+sin(2*x)*cos(2*x));
Figura 2.9: .
2.7 Gráficos de Outros Tipos de Funções
2.7.1 Gráficos de Funções Definidas por Partes
Sabemos que para definir funções por partes, utilizamos a sintaxe:
>piecewise(x<a1,f1(x),x<a2,f2(x),....);
Para esboçar o gráfico, utilizamos o comando plot, seguido de uma opção do plot:
>p1:=piecewise(x<a1,f1(x),x<a2,f2(x),....):
>plot(p1,x=a..b,discont=true);
Como sabemos, no caso de não incluir o comando discont=true, o gráfico apresentará linhasverticais ao passar por cada estágio da definição da função.
Exemplo 2.9.
1. Esboce o gráfico da função f(x) =
x se x ≤ 1
x2 se 1 < x < 3√x se 3 ≤ x
.
>p1 :=piecewise(x<=1,x,1<x and x<3,x ˆ 2,3<=x,sqrt(x)):
>plot(p1, x = -3 .. 8, y = -4 .. 5, discont = true, thickness = 3, numpoints = 100);

52 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.10: .
Como exercício, digite:
>plot(p1,x=-2..5);
2. Esboce o gráfico da função f(x) =
x (x2 − 1) se − 1 ≤ x ≤ 1
x, sen(π x) se 1 < x < 4√x − 3 se 4 ≤ x
.
>p2:=piecewise(-1 <= x and x <= 1 , x*(x ˆ 2-1), 1 < x and x < 4,x*sin(Pi*x), x >= 4, sqrt(x-3)):
>plot(p2, x = -1 .. 8, discont = true, thickness = 3, numpoints = 100);
Figura 2.11: .
3. Esboce o gráfico de f(x) = x2 [[x]], onde [[x]] é o maior inteiro que é menor ou igual a x.
>p3:=x ˆ 2 *floor(x):
>plot(p3, x = -4 .. 4, discont = true, thickness = 3);

2.7. GRÁFICOS DE OUTROS TIPOS DE FUNÇÕES 53
Figura 2.12: .
2.7.2 Gráficos de Funções Definidas por Tabelas
É comum definir algumas funções utilzando-se de dados, isto é por tabelas. Os dados da tabelasão digitados com a seguinte sintaxe:
>plot([dados],style=points,opções);
A seguir apresentamos alguns exemplos.
Exemplo 2.10.
1. Suponha que num período de 10 dias, é controlada a febre, em graus Celsius, de um pacientecom malária, obtendo:
Dia 1 2 3 4 5 6 7 8 9 10C 38 39 41 41.5 42 41.4 41 39 38 36
Podemos armazenar os dados como pares ordenados:
>dat1:=[[1,38],[2,39],[3,41],[4,41.5],[5,42],[6,41.4],[7,41],[8,39],[9,38],[10,36]]:
dat := [[1, 38], [2, 39], [3, 41], [4, 41.5], [5, 42], [6, 41.4], [7, 41], [8, 39], [9, 38], [10, 36]]
Agora, façamos:
>plot(dat1, style = point, thickness = 10, symbolsize = 15, color = blue);

54 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.13: .
Vejamos o que acontece se digitamos:
>plot(dat1);
Figura 2.14: .
2. A tabela mostra o tempo T , em segundos e a velocidade V , em km/h, de um carro:
T 0 1.8 2.6 3.4 5.1 6.5 7.2 8.5 9.6 10V 0 25 33 50 60.2 80 90 100 110 125
Podemos armazenar os dados como pares ordenados:
>dat2:=[[0,0],[1.8,25],[2.6,33],[3.4,50],[5.1,60.2],[6.5,80],[7.2,90],[8.5,100],[9.6,110],[10,125]];
dat2 :=[[0, 0], [1.8, 25], [2.6, 33], [3.4, 50], [5.1, 60.2], [6.5, 80], [7.2, 90], [8.5, 100],
[9.6, 110], [10, 125]]
Agora, façamos:
>plot(dat2,style = point, thickness = 10, symbol = solidcircle,symbolsize = 15,color = magenta);

2.8. LIVRARIA DO PLOT 55
Figura 2.15: .
3. Se f(n) =e2n
n!, n = 1, . . . 20, podemos armazenar os dados como pares ordenados:
>dat3 := [seq([i, evalf(f(i))], i = 0 .. 20)]:
plot(dat3,style = point, thickness = 10, symbol = cross, symbolsize = 20, color = magenta);
Figura 2.16: .
2.8 Livraria do Plot
O comando plot tem uma livraria no MAPLE, para fazer gráficos mais elaborados ou os gráfi-cos de várias funções, no mesmo referencial. Para ativar a livraria do plot, utilizamos a sintaxe:
>with(plots):
Para saber o conteúdo desta livraria, digitamos:
>with(plots):
[ animate, animate3d, animatecurve , arrow, changecoords, complexplot, complexplot3d, conformal,conformal3d, contourplot , contourplot3d, coordplot, coordplot3d, cylinderplot, densityplot, display ,

56 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
display3d, fieldplot, fieldplot3d, gradplot, gradplot3d, implicitplot, implicitplot3d, inequal, listcont-plot, listcontplot3d, listdensityplot, listplot, listplot3d, loglogplot, logplot, matrixplot, odeplot, pareto,pointplot, pointplot3d, , polarplot , polygonplot, polygonplot3d, polyhedra_supported, polyhedraplot,replot, rootlocus, semilogplot, setoptions, setoptions3d, spacecurve, sparsematrixplot, sphereplot, surf-data, textplot, textplot3d, tubeplot]
Todas estas sintaxes podem ser utilizadas para diferentes tipos de gráficos. Inicialmente, utili-zaremos os comando display, animate e implicitplot.
Para esboçar os gráficos de várias funções, no mesmo referencial, utilizamos:
>with(plots):
>g1:=plot(f1(x),x=a1..b1,opções):
>g2:=plot(f2(x),x=a2..b2,opções):
>g3:=plot(f3(x),x=a3..b3,opções):...
>gn:=plot(fn(x),x=an..bn,opções):
Finalmente:
>display(g1,g2,g3,. . . , gn);
Notamos, novamente, que uma vez digitado o comado with(plots):, ele fica rodando na me-mória e não é necessário voltar a digitá-lo para fazer outros exemplos.
Uma alternativa para esboçar gráficos no mesmo referencial é utilizar:
>plot({f1(x),f2(x),....,fn(x)},x=a..b,y=c..s, color=[cor1,cor2,....,corn], opções);
Exemplo 2.11.
1. Se f(x) = x3 − 7x+ 6, esboce os gráficos de f(x), f(x− 1)3 e f(x+ 1), no mesmo referencial.Digitamos:
f:=x->xˆ 3-7*x+6:
g:= x-> f(x-1):
h:= x-> f(x+1):
>plot({f(x),g(x),h(x) },x=-4..4,color=[red,aquamarine, gold],thickness=3,view=[-4..4,-10..20]);

2.8. LIVRARIA DO PLOT 57
Figura 2.17: .
2. Esboce os gráficos de f(x) =2x − 4
x + 3e sua inversa, no mesmo referencial.
>f:=x->(2*x-4)/(x+3);
f := x 7→ 2x − 4
x + 3
>solve(y=f(x),x);
−3 y + 4
y − 2
subs(y=x,%);
−3x + 4
x − 2
>g:=unapply(% ,x);
g := x 7→ −3x + 4
x − 2
>plot({f(x),g(x)},x=-15..15, discont=true, color=[blue,red], thickness=[3,3]);

58 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.18: .
3. Esboce os gráficos de f(x) = log1/4(x) e sua inversa, no mesmo referencial.
>with(RealDomain):
>f:=x->log[1/4] (x);
f := x 7→ −1
2
ln(x)
ln(2)
>solve(y=f(x),x);
4−y
subs(y=x,%);
4−x
>g:=unapply(% ,x);
g := x 7→ 4−x
>plot({f(x),g(x)},x = 0 .. 1.6, y = -0.5 .. 3, discont = true, thickness = [3, 3],color = [blue, red]);

2.8. LIVRARIA DO PLOT 59
Figura 2.19: .
4. Determine os pontos de interseção das curvas y = 1−x2 e y = 3x (1−x2). Esboce o resultadoobtido.
>p1 := 1-x ˆ 2:
p2 := 3*x*(1-xˆ 2):
> sol := fsolve(p1=p2, x);
sol := −1., .3333333333, 1.
>pontos := [[sol[1], subs(x = sol[1], p1)], [sol[2], subs(x = sol[2], p1)], [sol[3], subs(x = sol[3], p1)]];
pontos := [[−1., 0.], [.3333333333, .8888888889], [1., 0.]]
>with(plots):
>g1:=plot(p1,x=-1..1,color=red,thickness=2):
>g2:=plot(p2, x = -1 .. 1, color = green, thickness = 2):
>g3 := plot(pontos, thickness = 3, style = point, color = black, symbol = solidcircle,symbolsize = 15):
>display(g1,g2,g3);

60 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.20: .
5. Este exemplo é para mostrar como podem ser incluidos textos nos gráficos:
>p1:=(1/2) ˆ x:
>p2:= 5 ˆ x:
>p3:=(1/3) ˆx:
>plot([exp(x), p1,p2,p3], x = -1 .. 1, color = [blue, red, black, green],thickness = [2, 2, 2, 2],title = "Funcoes Exponenciais", legend = [exp(x), p1, p2,p3], view = [-1 .. 1, 0 .. 3])
Figura 2.21:
No caso, em que não desejamos carregar a livraria, podemos utilizar a seguinte sintaxe semdigitar with(plots):

2.9. GRÁFICOS DE REGIÕES 61
>plots[sintaxe da livraria](função, x=a..b,opções);
Exemplo 2.12.
1. Esboçe o gráfico de xx, em escala logarítmica. Digitamos:
> plots[logplot](x ˆ x ,x=1..10);
2 4 6 8 10
5
10
15
20
Figura 2.22:
2.9 Gráficos de Regiões
As novas versões do MAPLE tem a seguinte sintaxe para obter a solução gráfica de um sistemalinear de inequações:
>inequal(eq1,eq2,..., variação dos x,variação dos y, opções);
As opções são:
Para esboçar a região que satisfaz o problema: optionsfeasible
Para esboçar a região que não satisfaz pelo menos uma das equações do sistema:optionsexcluded
Para esboçar as limitações da região que não satisfaz o sistema optionsopen
Para esboçar as limitações da região que é solução o sistema: optionsclosed
Exemplo 2.13.
1. Considere o sistema:{
x + y > 0
x − y > 1
>eq1:=x+y>0:
>eq2:=x-y>1:

62 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
>inequal(eq1, eq2, x = -1 .. 3, y = -3 .. 2, optionsfeasible =(color = green),optionsopen = (color = blue, thickness = 2), optionsexcluded = (color = yellow));
Figura 2.23:
2 Considere o sistema:
y > 2 − x
y < 2x + 1
2 y ≥ x − 3
>eq1:=y>2-x:
>eq2:=y<2*x+1:
>eq3:=2*y>=x-3:
>inequal(eq1, eq2,eq3, x = -4 .. 7, y = -4 .. 7, optionsfeasible =(color = green),optionsopen = (color = blue, thickness = 2), optionsexcluded = (color = yellow),optionsclosed = (color = red, thickness = 3));
Figura 2.24:

2.10. ANIMAÇÕES 63
2.10 Animações
A sintaxe para fazer animações é simples. Precisamos digitar, primeiramente,with(plots): casoisso ainda não tenha sido feito:
>with(plots):
>animate(função, intervalo,parametro de animação,opções);
Ou
>plots[animate](função, intervalo, parametro de animação, opções);
Quando aparece o desenho, levamos a seta do mouse sobre este e pressionamos o mouse umavez. Uma barra horizontal aparecerá no alto da tela. O botão com um triângulo iniciará aanimação:
A opção frames=n especifica o número, n, de gráficos da animação.
Exemplo 2.14.
1 Digite:
>with(plots):
>animate(sin(x*t),x=0..2*Pi,t=1..2,frames=100);
Figura 2.25: Desenhos de 4 frames.
2. Digite:
>plots[animate]((x+t) ˆ 2, x=-10..10,t=1..10,frames=100,color=blue);

64 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.26: Desenhos de 4 frames.
3. Digite:
>animate( 3*exp(-0.2*t-xˆ 2)*sin(Pi*(x+t)),x=-5..5,t=0..20, view=[-3..3,-3..3],frames=70,thickness=3,color=blue,numpoints=200);
Figura 2.27:
Figura 2.28: Desenhos de 3 frames.
2.11 Traçado de Curvas
Considere a equação F (x, y) = 0, nas variáveis x e y. Para esbocar o lugar geométrico daequação, utilizamos a seguinte sintaxe:

2.11. TRAÇADO DE CURVAS 65
>with(plots):
>implicitplot(F(x,y)=0,variação do x,variação do y, opções);
Ou
>plots[implicitplot](F(x,y)=0,variação do x,variação do y,opções);
Para traçar várias curvas no mesmo referencial utilizamos a sintaxe:
>implicitplot([F(x,y)=0,G(x,y)=0,.....],variação do x,variação do y, opções);
As opções são as mesmas da sintaxe plot.
Exemplo 2.15.
1. Esboce o gráfico de x2 + y2 = 4 e x2 − y2 = 1, no mesmo referencial. Digitamos:
>implicitplot([x ˆ 2 +y ˆ 2 =4, x ˆ 2 -y ˆ 2 =1], x = -2 .. 2, y = -2 .. 2,color = [magenta, blue],thickness = [3, 3], tickmarks = [[-2, -1, 0, 1, 2], [-2, -1, 0, 1, 2]], view = [-2.2 .. 2.2, -2.2 .. 2.2]);
Figura 2.29:
2. Esboce o gráfico das seguintes retas x = −0.5, x = 0.5, x = −1, x = 1, y = −1 e y = 1, nomesmo referencial. Digitamos:
>implicitplot([x = -1, x = -0.5, x = 0.5, x = 1, y = -1, y = 1], x = -2 .. 2, y = -2 .. 2,color = [blue, green, black, red, magenta, coral], thickness = [3, 3, 3, 3,3,3]);

66 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
Figura 2.30:
3. Esboce o gráfico de x2 − y2 = i e y2 − x2 = i, onde i ∈ {1, . . . , 5}, no mesmo referencial.Digitamos:
>curv1 := seq(xˆ2-yˆ 2 = i, i = 1 .. 5):
>curv2 := seq(-xˆ2+yˆ 2 = i, i = 1 .. 5):
>implicitplot([curv1,curv2], x = -5 .. 5, y = -5 .. 5, color = blue, color = [blue, red, green, black,magenta], thickness = [2, 2, 2, 2, 2], view = [-5 .. 5, -4 .. 4]);
Figura 2.31:
2.12 Deficiências do MAPLE
O MAPLE apresenta deficiências ao resolver alguns problemas, podendo, inclusive, não con-seguir resolvê-los; isto se deve, essencialmente, às limitações dos algoritmos utilizados pelo

2.12. DEFICIÊNCIAS DOMAPLE 67
software. Muitos destes algoritmos não foram programados para reproduzir manipulaçõesalgébricas, que são possíveis quando resolvemos o problema à mão.
Portanto, é recomendável que se verifiquem todos os resultados obtidos no MAPLE.
A seguir, apresentaremos alguns exemplos destas deficiências.
Exemplo 2.16.
1. Consideremos a função:
f(x) =x2 − 1
x − 1.
Note que Dom(f) = R − {1}. Se fizermos:
>f:=x->(x ˆ2 -1)/(x-1) :
>simplify(f(x)):
>g:=unapply(%,x);
g := x 7→ x + 1
Ora, a função g(x) = x + 1 tem domínio R, portanto as funções f e g, são diferentes; f(1) nãoexiste e g(1) = 2.
O seguinte exemplo se aplica as versões do MAPLE, que não possuem a opção AllSolution;por exemplo, nas versões anteriores a 9.5, inclusive.
2. Resolva a equação cos(x) = 0. Se fizermos:
>solve(cos(x)=0,{x});
{x =1
2π}
Mas, sabemos que esta equação possui infinitas soluções.
Algumas vezes é indicado o comando fsolve, que permite especificar o intervalo onde se desejaachar a solução.
Se fizermos:
>fsolve(cos(x)=0,{x},Pi..2*Pi);
{4.712388980}
Note que a solução da equação no intervalo [π, 2π] é3π
2. Utilize o comando evalf para compa-
rar os resultados.
3. Resolva a equação:

68 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
ecos(x) = ln(2 + sen(x)).
Se digitamos:
>fsolve(exp(cos(x))=ln(2+sin(x)),{x});
O MAPLE não apresenta uma solução razoável. Note que esta equação tem solução; para isto,basta fazer os gráficos das funções exp(cos(x)) e ln(2 + sen(x)).
>with(plots):
>p1:=plot(exp((cos(x)),x=0..Pi,color=black):
>p2:=plot(ln((2+sin(x)),x=0..Pi,color=red):
>display(p1,p2);
0.5 1.0 1.5 2.0 2.5 3.0
1.0
1.5
2.0
2.5
Figura 2.32: .
4. Resolva o sistema:{
x3 − 9x2 + y2 x + 24x − 7 y2 − 16 = 0
3x2 − 18x + y2 + 24 = 0.
Façamos:
>p1:=x ˆ 3 -9*x ˆ 2 +yˆ2 *x+24*x -7 y ˆ 2 -16=0:
>p2:=3*xˆ2 -18*x +y ˆ 2 +24=0:
>solve({p1,p2 },{x, y});
Obtemos {x = 4, y = 0} e:
{y = RootOf(Z2 − 33 + 15 ∗ RootOf(_Z2 + 11 ∗ _Z + 19)), x = RootOf(_Z2 + 11 ∗ _Z + 19)};
Fazendo:

2.12. DEFICIÊNCIAS DOMAPLE 69
> evalf(RootOf(Z2 − 33 + 15 ∗ RootOf(_Z2 + 11 ∗ _Z + 19)));
−0.9008493159
> evalfRootOf(_Z2 + 11 ∗ _Z + 19));
2.145898034
Agora, a forma mais econômica de resolver o sistema é pondo em evidência y2 na segundaequação e substituindo na primeira:
>p3:=-2*xˆ3 +30*xˆ2 -126*x+152=0:
>solve(p3,{x});
Obtemos {x = 4}, {x =11 + 3
√5
2} e {x =
11 − 3√
5
2}, de onde podemos obter os valores de y:
>solve(subs(x=4,p2),y);
Fica como exercício, obter os valores de y.

70 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
2.13 Exercícios
1. Verifique que a distância do ponto (x0, y0) à reta ax + by + c = 0 é
|ax0 + by0 + c|√a2 + b2
.
2. Determine a distância entre as retas 4x + 3y + 12 = 0 e 4x + 3y − 38 = 0.
3. Ache a equação da reta que passa pelos pontos:
(a) P1 = (3, 1); P2 = (5, 2)
(b) P1 = (1, 3); P2 = (2, 5)
(c) P1 = (−5, 3); P2 = (0, 4)
(d) P1 = (1,−1); P2 = (−1, 1)
(e) P1 = (2, 3); P2 = (4, 7)
(f) P1 = (1, 1); P2 = (−1,−1)
4. Obtenha a equação da reta paralela à reta 2x + 3 y + 1 = 0 e que passa pelo ponto
P = (5,−2).
5. Ache a equação da reta perpendicular à reta 2x + 5 y − 1 = 0 e que passa pelo pontoP = (1, 1).
6. Verifique que as retas 2x + 3 y = 1 e 6x − 4 y − 1 = 0 são perpendiculares.
7. Determine a natureza das curvas representadas pelas seguintes equações:
(a) 3y2 − 2x − 12y + 12 = 0
(b) 16x2 − 9y2 = −144
(c) x2 + y2 − 2x − 8 = 0
(d) 2x2 + 4x + 3y − 4 = 0
(e) 9x2 + 4y2 − 18x − 16y − 11 = 0
(f) 9x2 − 16y2 − 36x − 32y − 124 = 0
(g) 9x2 + 16y2 = 25
(h) x2 + y2 + 16x + 16y + 64 = 0.
(i) 5x2 + 25x + 10y2 − 5 = 0
(j) x2 + 8x + −y2 + 3 y = 0.
(k) x2 + y2 − 4x − 4 y = 0
(l) x2 + y2 − 18x − 14 y + 130 = 0.
(m) x2 + y2 + 8x + 10 y + 40 = 0
(n) 4x2 + 4 y2 + 12x − 32 y = −37.
8. Defina as funções f(x) = |x| + |x + 4| e g(x) = |x| + 2 |x + 4|.
(a) Determine os domínios.
(b) Esboce os gráficos de f e g no mesmo referencial.
9. Defina f(x) = |x| − 2x.

2.13. EXERCÍCIOS 71
(a) Esboce o gráfico de f .
(b) Calcule f(1), f(1), f(−0.9) e f(
− 23
)
.
(c) Verifique que f(|a|) = −|a|.
10. Defina a função f(x) =x − 1
2x + 7.
(a) Determine os domínios.
(b) Esboce o gráfico de f .
(c) Calcule f(1
x
)
e(
f(x))−1.
(d) Esboce os gráficos, no mesmo referencial, das funções obtidas no ítem anterior.
11. Esboçando os gráficos, no mesmo referencial, verifique se as seguintes funções são cons-tantes; explique:
(a) f(x) =1
x+
x − 1
x.
(b) f(x) =x
|x| −|x|x.
12. Determine f + g, f − g, f · g e f/g e esboce os respectivos gráficos, se:
(a) f(x) = 2x, g(x) = x2 + 2
(b) f(x) = 3x − 2, g(x) = |x + 2|(c) f(x) =
√x + 1, g(x) = x2 − 1
(d) f(x) =√
x + 1, g(x) =√
x + 3
(e) f(x) = x4, g(x) = (1
x)4
(f) f(x) =1
x, g(x) = x2
(g) f(x) = x3 + x2, g(x) = (1
x2)4
(h) f(x) =1
x2, g(x) = x2
13. Verifique que Im(f) ⊂ Dom(g) e determine g ◦ f se:
(a) f(x) = x + 2, g(x) = 3x + 1
(b) f(x) = x2 + 2, g(x) =√
x
(c) f(x) = x2 + 3, g(x) =x + 1
x − 2
(d) f(x) = 2x − 3, g(x) = −x2 + 3x + 1
(e) f(x) = x + 1, g(x) =2
x − 2

72 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL
(f) f(x) =x
x + 1, g(x) =
x + 1
x − 1
14. Se f(x) =x + 1
rx − 1. Determine Dom(f) e calcule:
(a) (f ◦ f ◦ f ◦ f)(x2 + 1)
(b) (f ◦ f ◦ f)((x + 1)2)
(c) (f ◦ f)( 1
1 − x
)
(d) (f ◦ f)(1
x
)
(e) Esboce os respectivos gráficos.
15. Esboce o gráfico das seguintes funções logarítmicas:
(a) y = ln(−x), x < 0
(b) y = ln(|x|)
(c) y =ln(x)
x
(d) y = x ln(x)
(e) y = |ln(x)|(f) y = ln(x2)
16. O pH (potencial hidrogênico) é uma escala logarítmica que varia de 0 a 14, e nos indicaquão ácida ou alcalina é uma substância. Valores abaixo de 7,0 são ácidos e acima sãoalcalinos. O valor 7 é neutro e corresponde ao pH da água destilada. O pH é modeladopor:
pH = −log10[H+],
onde [H+] é a concentação de íons de hidrogênio mol/litro.
(a) Complete a seguinte tabela:
Substância [H+] pHLeite 1.5848 × 10−7
L. de Magnesia 10−10
Suco de laranja 3.162 × 10−5
Limão 0.501 × 10−2
Vinagre 12.58 × 10−4
Tomate 6.30 × 10−8
(b) Esboce o gráfico da tabela.

2.13. EXERCÍCIOS 73
17. Esboce o gráfico da função definida pela seguinte tabela:
x 0 1 2 3 4 5 6 10f(x) 0 5 3 5 6 8 3.2 9
18. Utilize a sintaxe animate, para analisar o papel dos parâmetros da equação de segundograu ax2 + b x + c = 0.
19. Utilize a sintaxe animate, para analisar o papel dos parâmetros da função f(x) = eax+b,se:
(a) a > 0 e b > 0
(b) a > 0 e b < 0
(c) a < 0 e b > 0
(d) a < 0 e b < 0
(e) a > 0 e b = 0
(f) a < 0 e b = 0

74 CAPÍTULO 2. FUNÇÕES DE UMA VARIÁVEL

Capítulo 3
LIMITES E CONTINUIDADE
3.1 Introdução
A seguir, apresentaremos como listar os valores de uma função, no formato de tabela, em umavizinhança de um ponto que não necessariamente pertence ao do domínio da função. Não nosaprofundaremos muito no significado destas sintaxes:
copiar: printpara: forse: ifentão: thense não: elsede: froma: tofaça: do
A sintaxe print(expressão); permite exibir a expressão digitada. A sintaxe for se utiliza paraindicar a variação de um contador da seguinte forma - for contador from início to final do. Emgeral, a sintaxe é utilizada para realizar tarefas repetitivas, uma certa quantidade de vezes.
A sintaxe if é para executar uma instrução, ou um grupo de instruções, se e, somente se, verificacerta condição. Se além disso, desejamos que as intruções sejam executadas, ainda que algumasoutras intruções não se verifiquem, se utiliza a sintaxe else.
As sintaxes fi e od são para fechar as intruções. Note que fi é if ao contrário e od é do aocontrário.
Sugerimos que a seguinte tabela seja copiada, para realizar os exercícios. A sintaxe para obterestas tabelas é a seguinte:
Para estudar uma função em uma vizinhança de 0, escrevemos
> print([‘x‘.‘ ‘.‘f(x)‘]);for i from -10 to 10 doif i <> 0 then print(array([seq([evalf(1/(100*k),6),evalf(f(1/(100*k)),5)],k=i)]))else print(‘indefinido em x=0‘)
75

76 CAPÍTULO 3. LIMITES E CONTINUIDADE
fi ;od;
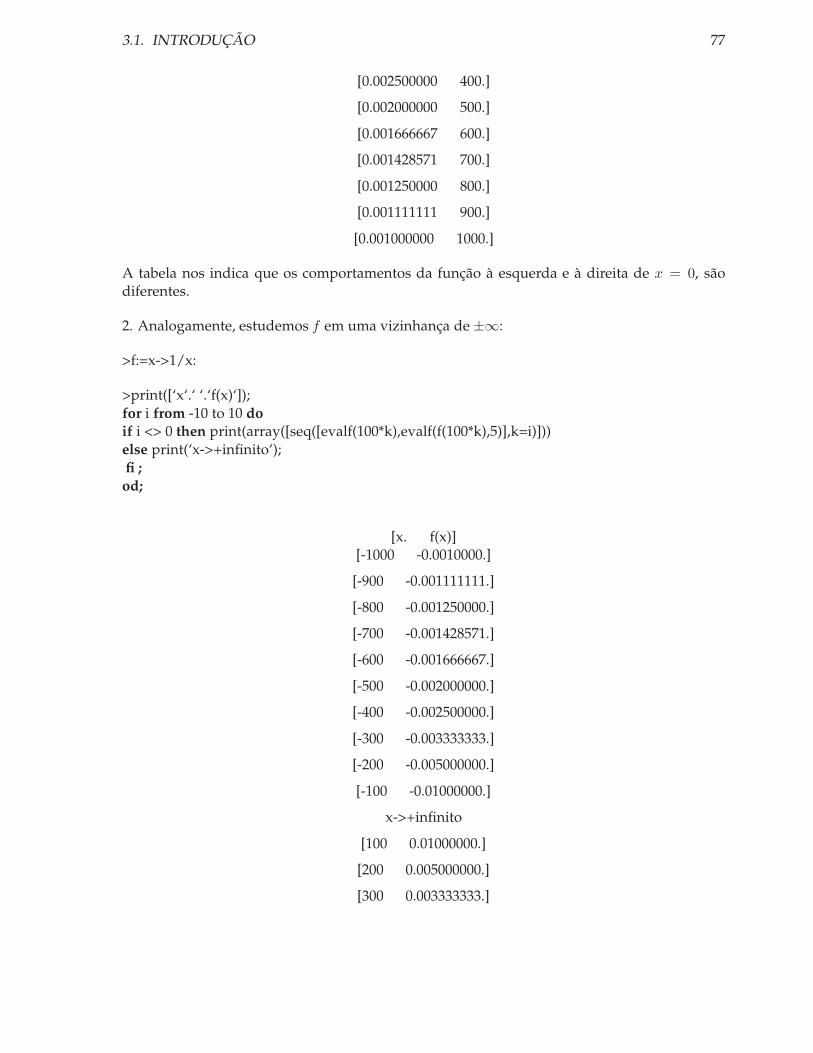
Para estudar uma função para valores de |x| arbitrariamente grandes; isto é em ±∞, escreve-mos:
> print([‘x‘.‘ ‘.‘f(x)‘]);for i from -10 to 10 doif i <> 0 then print(array([seq([evalf(100*k,6),evalf(f(100*k),5)],k=i)]))else print(‘x->+infinito‘)fi ;od;
Exemplo 3.1.
1. Seja f(x) =1
x. Estudemos f em uma vizinhança de 0:
>f:=x->1/x:
>print([‘x‘.‘ ‘.‘f(x)‘]);for i from -10 to 10 doif i <> 0 then print((array([seq([evalf(1/(100*k)),evalf(f(1/100*k),5)],k=i)]))else print(‘indefinida em x=0‘)fi ;od;
[x. f(x)][-0.001000000 -1000.]
[-0.001111111 -900.]
[-0.001250000 -800.]
[-0.001428571 -700.]
[-0.001666667 -600.]
[-0.002000000 -500.]
[-0.002500000 -400.]
[-0.003333333 -300.]
[-0.005000000 -200.]
[-0.01000000 -100.]
indefinida em x=0
[0.01000000 100.]
[0.005000000 200.]
[0.003333333 300.]
3.1. INTRODUÇÃO 77
[0.002500000 400.]
[0.002000000 500.]
[0.001666667 600.]
[0.001428571 700.]
[0.001250000 800.]
[0.001111111 900.]
[0.001000000 1000.]
A tabela nos indica que os comportamentos da função à esquerda e à direita de x = 0, sãodiferentes.
2. Analogamente, estudemos f em uma vizinhança de ±∞:
>f:=x->1/x:
>print([‘x‘.‘ ‘.‘f(x)‘]);for i from -10 to 10 doif i <> 0 then print(array([seq([evalf(100*k),evalf(f(100*k),5)],k=i)]))else print(‘x->+infinito‘);fi ;od;
[x. f(x)][-1000 -0.0010000.]
[-900 -0.001111111.]
[-800 -0.001250000.]
[-700 -0.001428571.]
[-600 -0.001666667.]
[-500 -0.002000000.]
[-400 -0.002500000.]
[-300 -0.003333333.]
[-200 -0.005000000.]
[-100 -0.01000000.]
x->+infinito
[100 0.01000000.]
[200 0.005000000.]
[300 0.003333333.]

78 CAPÍTULO 3. LIMITES E CONTINUIDADE
[400 0.002500000.]
[500 0.002000000.]
[600 0.001666667.]
[700 0.001428571.]
[800 0.001250000.]
[900 0.001111111.]
[1000 0.001000000.]
A tabela nos indica que o comportamento da função em ±∞, tende a zero.
3.2 Limites
Inicialmente desenvolveremos a idéia intuitiva de limite, estudando o comportamento de umafunção y = f(x) nas proximidades de um ponto que não pertence, necessariamente, ao seudomínio.
Exemplo 3.2.
1. Seja
f(x) =sen(x)
x
É claro que Dom(f) = R − {0}. Estudaremos a função nos valores de x que ficam próximos de0, mas sem atingir 0. Vamos construir uma tabela de valores de x aproximando-se de 0, pelaesquerda (x < 0) e pela direita (x > 0) e os correspondentes valores de f(x).
Digitemos:
>f:=x->sin(x)/x,
f := x −→ sen(x)
x
>print([‘x‘.‘ ‘.‘f(x)‘]);for i from -10 to 10 doif i <> 0 then print(array([seq([evalf(1/(100*k)),evalf(f(1/(100*k)),5)],k=i)]))else print(‘indefinido em x=0‘)fi ;od;
[x. f(x)][-0.001000000 0.9999998333.]
[-0.001111111 0.9999997938.]

3.2. LIMITES 79
[-0.001250000 0.9999997392.]
[-0.001428571 0.9999996601.]
[-0.001666667 0.9999995370.]
[-0.002000000 0.9999993335.]
[-0.002500000 0.9999989584.]
[-0.003333333 0.9999981480.]
[-0.005000000 0.9999958334.]
[-0.01000000 0.9999833334.]
indefinida em x=0
[0.01000000 0.9999833334.]
[0.005000000 0.9999958334.]
[0.003333333 0.9999981480.]
[0.002500000 0.9999989584.]
[0.002000000 0.9999993335.]
[0.001666667 0.9999995370.]
[0.001428571 0.9999996601.]
[0.001250000 80.9999997392.]
[0.001111111 0.9999997938.]
[0.001000000 0.9999998333.]
Observando o resultado da tabela, podemos verificar que: “à medida que x vai se aproximandode 0, os valores de f(x) vão aproximando-se de 1”. A noção de proximidade pode ficar maisprecisa utilizando valor absoluto. De fato, a distância entre dois pontos quaisquer x, y ∈ R é|y − x|. Assim a frase escrita entre aspas, pode ser expressa por: se |x| aproxima-se de zero,então |f(x) − 1| também se aproxima de zero; em outras palavras: para que |f(x) − 1| sejapequeno é necessário que |x| também seja pequeno. Logo:
limx→0
sen(x)
x= 1.

80 CAPÍTULO 3. LIMITES E CONTINUIDADE
Figura 3.1: .
2. Seja
f(x) = (1 + x)1/x.
É claro que Dom(f) = R − {0}. Estudaremos a função nos valores de x que ficam próximos de0, mas sem atingir 0. Vamos construir uma tabela de valores de x aproximando-se de 0, pelaesquerda (x < 0) e pela direita (x > 0) e os correspondentes valores de f(x).
Digitemos:
>f:=x->(1+x) ˆ (1 / x),
f := x −→ (1 + x)1/x
>print([‘x‘.‘ ‘.‘f(x)‘]);for i from -10 to 10 doif i <> 0 then print(array([seq([evalf(1/(100*k)),evalf(f(1/(100*k)),5)],k=i)]))else print(‘indefinida em x=0‘)fi ;od;
[x. f(x)][-0.001000000 2.719642216.]
[-0.001111111 2.719793525.]
[-0.001250000 2.719982704.]
[-0.001428571 2.720226004.]
[-0.001666667 2.720550530.]
[-0.002000000 2.721005103.]
[-0.002500000 2.721687486.]
[-0.003333333 2.722826185.]

3.3. CÁLCULO DE LIMITES 81
[-0.005000000 2.725108829.]
[-0.01000000 2.731999026.]
indefinida em x=0
[0.01000000 2.704813829.]
[0.005000000 2.711517123.]
[0.003333333 2.713765158.]
[0.002500000 2.714891744.]
[0.002000000 2.715568521.]
[0.001666667 2.716020049.]
[0.001428571 2.716342738.]
[0.001250000 2.716584847.]
[0.001111111 2.716773208.]
[0.001000000 2.716923932.]
Observando o resultado da tabela, podemos verificar que: “à medida que x vai se aproximandode 0, os valores de f(x) vão aproximando-se de e”. Logo, para que |f(x) − e| seja pequeno énecessário que |x| também seja pequeno. Logo:
limx→0
(1 + x)1/x = e.
Figura 3.2: .
3.3 Cálculo de Limites
A sintaxe para o cálculo do limite:
limx→a
f(x)
é:

82 CAPÍTULO 3. LIMITES E CONTINUIDADE
> limit(função, variável=a, direção);
a pode ser um ponto
-infinity se a = −∞infinity se a = +∞.
A direção é opcional e pode ser:
left se for um um limite lateral pela esquerda
right se for um um limite lateral pela direita.
Uma forma alternativa para calcular limites é utilizar a seguinte sintaxe:
> Limit(função, variável=a, direção);
>evalf(%);
Observamos que o comando onde aparece limit, com letra minúscula, calcula o limite e o co-mando Limit, om letra maiúscula, somente exibe a expressão matemática do limite, por issoacima precisamos utilizar o comando evalf(%);.
Juntando ambas as sintaxes, podemos reescrever os limites em forma mais didática:
> Limit(função, variável=a, direção)=limit(função, variável=a, direção);
Veja os exemplos
Exemplo 3.3.
1. Determine limx→0
7√
x2 + 1 − 7√
x2 − 14√
x2 + 1 − 4√
x2 − 1.
>p1:=(root(x ˆ 2+1,7)-root(1-x ˆ 2 ,7))/(root(x ˆ 2+1,4)-root(1-x ˆ 2 ,4)):
> Limit(p1,x=0)=limit(p1,x=0);
limx→0
7√
x2 + 1 − 7√
1 − x2
4√
x2 + 1 − 4√
1 − x2=
4
7
2. Determine limx→π/2
tg(x).
> Limit(tanx(x),x=Pi/2)=limit(tan(x),x=Pi/2);
limx→π/2
tan(x) = undefined
Se incluimos as opções:
> Limit(tanx(x),x=Pi/2,right)=limit(tan(x),x=Pi/2,right);

3.3. CÁLCULO DE LIMITES 83
limx→π+/2
tan(x) = −∞
> Limit(tanx(x),x=Pi/2,leftt)=limit(tan(x),x=Pi/2,left);
limx→π−/2
tan(x) = ∞
3. Determine limx→0
sen(1
x
)
.
>Limit(sin(1/x),x=0)=limit(sin(1/x), x=0)
limx→0−
sin(1
x
)
= −1 . . . 1
Pode explicar este resultado?
4. Determine limx→0
√x4 + x2
x.
> p2:=sqrt(x ˆ 4 +x ˆ 2) /x:
>Limit(p2,x=0)=limit(p2, x=0)
limx→0
√x4 + x2
x= undefined
>Limit(p2,x=0,left)= limit(p2, x=0, left)
limx→0−
√x4 + x2
x= −1
> Limit(p2,x=0,right)=limit(p2, x=0, right)
limx→0+
√x4 + x2
x= 1
Pode explicar este resultado.
Figura 3.3: .

84 CAPÍTULO 3. LIMITES E CONTINUIDADE
5. Determine limx→0
cos(α x) − cos(β x)
x2.
>p3:=(cos(alpha*x)-cos(beta*x))/x ˆ2:
> Limit(p3,x=0)=limit(p3,x=0);
limx→0
cos (α x) − cos (β x)
x2= −1
2α2 +
1
2β2
6. Determine limx→0
tg(2x)
x.
>Limit(tan(2*x)/x,x=0)=limit(tan(2*x)/x, x=0)
limx→0
tan(2x)
x= 2
7. Determine limx→+∞
(
x + 3
x + 5
)x
.
>p4:=((x+3)/(x+5)) ˆ x:
> Limit(p4,x=infinity)=limit(p4,x=infinity);
limx→∞
(
x + 3
x + 5
)x
= e−2
8. Determine limx→0
(
6x − 1
x
)
.
>p5:=(6 ˆ x-1)/x:
> Limit(p5,x=0)=limit(p5,x=0);
limx→0
6x − 1
x= ln(2) + ln(3)
Figura 3.4: .

3.3. CÁLCULO DE LIMITES 85
9. Determine limx→b
x2 − b2
√x −
√b.
>p6:=(x ˆ2-b ˆ 2)/(sqrt(x)-sqrt(b):
> Limit(p6,x=b)=limit(p6,x=b);
limx→b
x2 − b2
√x −
√b
= 4 b3/2
10. Se f(x) =
x cos(π x) se x < −1
sen(π x) se − 1 ≤ x < 1√x se x > 1
, calcule limx→±1
f(x).
>p7:= piecewise(x < 1, x*cos(x), and -1 <= x, x <= 1, sin(x)/x, x > 1, sqrt(x)):
> Limit(p7,x=-1,right)=limit(p7,x=-1,right);
limx→−1+
(
x cos(π x) x < 1
sin(π x) −1 ≤ x andx ≤ 1√x 1 < x
)
= 1
> Limit(p7,x=-1,right)=limit(p7,x=-1,right);
limx→−1+
(
x cos(π x) x < 1
sin(π x) −1 ≤ x andx ≤ 1√x 1 < x
)
= 0
> Limit(p7,x=1,right)=limit(p7,x=1,right);
limx→1+
(
x cost(π x) x < 1
sin(π x) −1 ≤ x andx ≤ 1√x 1 < x
)
= 1
> Limit(p7,x=1,left)=limit(p7,x=1,left);
limx→1−
(
x cos (π x) x < 1
sin(π x) −1 ≤ x andx ≤ 1√x 1 < x
)
= 0

86 CAPÍTULO 3. LIMITES E CONTINUIDADE
Figura 3.5: .
11. Se f(x) = x2 sen(1
x
)
; determine
limh→0
f(x + h) − f(x)
h.
>f:=x->x ˆ2 *sin(1/x):
p8:=(f(x+h)-f(x))/h:
>factor(limit(p8,h=0));
2 sin(1
x
)
x − cos(1
x
)
3.4 Definição de Limite
Seja :
f : A ⊂ R −→ R,
definida em A, exceto possívelmente, em a. Sabemos que:
limx→a
f(x) = L
se, e somente se:
Para todo ε > 0, existe δ > 0 tal que se x ∈ (a− δ, a+ δ)∩(
A−{a})
, então f(x) ∈ (L− ε, L+ ε).
Observe que o limite de uma função y = f(x) num ponto a, depende apenas dos valores que fassume nas proximidades de a, ou seja, num pequeno intervalo aberto de centro a.
Uma das principais dificultades, dos alunos, de entender a definição de limite é sua carac-terística dinâmica. Para facilitar a compreensão da definição, apresentaremos alguns exem-plos, onde é utilizanda a sintaxe animate.

3.4. DEFINIÇÃODE LIMITE 87
Exemplo 3.4.
1. É claro que limx→2
x2 = 4. Então para todo número real positivo ε existe outro número real
positivo δ, que depende de ε, tal que se 0 < |x − 2| < δ, então |f(x) − 4| < ε.
Esbocemos a situação para ε = 0.8 e δ ≤ 0.18, digitando a seguinte sequência de comandos:
with(plots):
> H:=plots[implicitplot]({x=2,y=4},x=0..2,y=-1..4,color=blue):
> G:=plots[implicitplot]({x=1.82,x=2.18},x=0..4,y=-1..7,color=red):
> L:=plot(x ˆ 2,x=0..4,color=black,thickness=2):
>M:=plot({4.8,3.2},x=0..4,y=-1..7,color=red):
>display(H,G,L,M);
Figura 3.6: .
2. Visualizemos limx→1
2x = 2.
Esbocemos a situação, digitando a seguinte sequência de comandos:
>with(plots):
>M := plot(2*x, x = 0 .. 2, numpoints = 300, scaling = constrained, color = black):
>M1 := plot(2, x = 0 .. 1, numpoints = 200, scaling = constrained, color = blue):
>M2 := plots[implicitplot](x = 1, x = 0 .. 1, y = 0 .. 2, numpoints = 200,scaling = constrained, color = blue):
>A1 := animate(2+(1-(1/10)*t), x = 0 .. 2, t = 0 .. 8, frames = 50, scaling = constrained, color = red):
>A2 := animate(1+(1/10)*t, x = 0 .. 2, t = 0 .. 8, frames = 50, scaling = constrained, color = red):
>B1 := animate([1+(1-(1/10)*t)*(1/3), x, x = 0 .. 3.5], t = 0 .. 8, frames = 50,scaling = constrained, color = green):
>B2 := animate([x, 2+2*((1-(1/10)*t)*(1/3)), x = 0 .. 2], t = 0 .. 8, frames = 50,scaling = constrained, color =green):

88 CAPÍTULO 3. LIMITES E CONTINUIDADE
>B3 := animate([1-(1-(1/10)*t)*(1/3), x, x = 0 .. 3.5], t = 0 .. 8, frames = 50,scaling = constrained, color = green):
>B4 := animate([x, 2-2*((1-(1/10)*t)*(1/3)), x = 0 .. 2], t = 0 .. 8, frames = 50,scaling = constrained, color = green):
>display(M, M1, M2, A1, A2, B1, B2, B3, B4);
Notemos que as retas limitantes em vermelho indicam a escolha do ε e as retas limitanteshorizontais, em verde, indicam a regão de segurança para o correspondente δ representadopelas retas limitantes verticais, em verde.
Nos desenhos, diferentes estágios da animação:
Figura 3.7:
Figura 3.8:
Agora estamos em condições de esclarecer o primeiro exemplo, do parágrafo sobre as deficiên-cias do MAPLE, no capítulo anterior.
Consideremos a função:
f(x) =x2 − 1
x − 1

3.5. ASSÍNTOTAS 89
>f:=x->(x ˆ2 -1)/(x-1) :
>f(1);
Error, (in f) numeric exception: division by zero
>g:= unapply(simplify(f(x)), x);
g := x 7→ x + 1
>g(1);
2
Quando usamos o comado simplify, o MAPLE cancela, seguindo o mesmo procedimento queutiliza para determinar a solução de:
limx→1
x2 + 1
x − 1= lim
x→1x + 1 = 2
Isto é, ao simplificar, o MAPLE não considera mais a função f , e sim, a função g.
3.5 Assíntotas
A reta y = b é uma assíntota horizontal ao gráfico da função y = f(x), se pelo menos uma dasseguintes afirmações é verdadeira:
limx→+∞
f(x) = b ou limx→−∞
f(x) = b.
A reta x = a é uma assíntota vertical ao gráfico da função y = f(x), se pelo menos uma dasseguintes afirmações é verdadeira:
limx→a+
f(x) = ±∞ ou limx→a−
f(x) = ±∞.
Observamos que, mesmo se Dom(f) = R, a função pode ter assíntotas verticais. Por exemplo:
f(x) =
1
xse x 6= 0
2 se x = 0
No caso, de Dom(f) = R e a função ser contínua, então f não possui assíntotas verticais.
Para descobrir, experimentalmente, se uma função possui assíntotas horizontais e/ou verticais,utilizamos a sintaxe:
>plot(f, x = -infinity .. infinity);

90 CAPÍTULO 3. LIMITES E CONTINUIDADE
Figura 3.9: Gráfico de x+1x+3 quando x −→ ±∞.
Exemplo 3.5.
1. Esboce o gráfico de y =x
x − 1.
Dom(f) = R − {1} e a curva passa por (0, 0). De fato:
>f:=x->x/(x -1):
>solve(f(x)=0,x);
0
>plot(f(x), x = -infinity .. infinity)
Figura 3.10: Gráfico de f quando x −→ ±∞.
Do desenho, podemos concluir que o gráfico da função possui uma assíntota horizontal e umavertical. De fato:
>lim(f(x),x=infinity,left);

3.5. ASSÍNTOTAS 91
1
>lim(f(x),x=infinity,rigth);
1
Logo, y = 1 é uma assíntota horizontal. Por outro lado, determinamos as assíntotas verticais:
>lim(f(x),x=1,left);
−∞
>lim(f(x),x=1,rigth);
∞Logo, x = 1 é uma assínota vertical. Esboço do gráfico:
>with(plots):
>p:= x/(x-1):
>a1:= plot(p, x = -3 .. 3, discont = true, thickness = 3, color = blue):
>a2:= plot(1, x = -3 .. 3, style = point, symbol = cross, color = green):
>a3:= implicitplot([x = 1], x = -4 .. 4, y = -4 .. 4, style = point):
>display(a1,a2,a3,view=[-3..3,-4..4]);
Figura 3.11: gráfico de f .
2. Esboce o gráfico de y =x2
x2 − 1.
Dom(f) = R − {−1, 1} e a curva passa por (0, 0). De fato:

92 CAPÍTULO 3. LIMITES E CONTINUIDADE
>f:=x->x ˆ 2/(x ˆ 2 -1):
>solve(f(x)=0,x);
0
>plot(f(x), x = -infinity .. infinity)
Figura 3.12: gráfico de f quando x −→ ±∞.
Do desenho, podemos concluir que o gráfico da função possui uma assíntota horizontal e duasverticais. De fato:
>lim(f(x),x=infinity,left);
1
>lim(f(x),x=infinity,rigth);
1
Logo, y = 1 é uma assíntota horizontal. Por outro lado, determinamos as assíntota verticais:
>lim(f(x),x=1,left);
−∞
>lim(f(x),x=1,rigth);
∞
>lim(f(x),x=-1,left);
∞

3.5. ASSÍNTOTAS 93
>lim(f(x),x=-1,rigth);
−∞
Logo, x = ±1 são assíntotas verticais. Esboço do gráfico:
>with(plots):
>p:= xˆ 2/(x ˆ 2 -1):
>a1:= plot(p, x = -3 .. 3, discont = true, thickness = 3, color = blue):
>a2:= plot(1, x = -3 .. 3, style = point, symbol = cross, color = green):
>a3:= implicitplot([x = -1,x=1], x = -4 .. 4, y = -4 .. 4, style = point):
>display(a1,a2,a3,view=[-3..3,-4..4]);
Figura 3.13: gráfico de f .
3. Esboce o gráfico de y =x4 + 1
x5 − x.
>f:=x->(x ˆ 4 +1)/(x ˆ 5 -x):
>plot(f(x), x = -infinity .. infinity)

94 CAPÍTULO 3. LIMITES E CONTINUIDADE
Figura 3.14: Gráfico de f quando x −→ ±∞.
Do desenho, podemos concluir que o gráfico da função possui uma assíntota horizontal e trêsverticais. De fato:
>lim(f(x),x=infinity,left);
0
>lim(f(x),x=infinity,rigth);
0
Logo, y = 0 é uma assíntota horizontal. Por outro lado, determinamos as assíntota verticais:
>lim(f(x),x=1,left);
−∞
>lim(f(x),x=1,rigth);
∞
>lim(f(x),x=-1,left);
−∞
>lim(f(x),x=-1,rigth);
−∞
>lim(f(x),x=0,left);

3.6. CONTINUIDADE 95
∞
>lim(f(x),x=0,rigth);
−∞Logo, x = −1, x = 1 e x = 0 são assíntotas verticais. Esboço do gráfico:
>with(plots):
>p:= (xˆ 4 +1)/(xˆ 5 -x):
>a1:= plot(p, x = -3 .. 3, discont = true, thickness = 3, color = blue):
>a2:= implicitplot([x=-1,x = 1], x = -4 .. 4, y = -4 .. 4, style = point):
>display(a1,a2,view=[-3..3,-4..4]);
Figura 3.15: gráfico de f .
3.6 Continuidade
A seguinte sintaxe é utilizada para saber se uma função é contínua ou não:
>iscont(função, x=a..b);
A resposta será true onde for contínua e false onde for descontínua, relativa ao intervalo (a, b).Para o intervalo [a, b], utilizamos:
>iscont(função, x=a..b,closed);
Para determinar os pontos de descontinuidade de uma função, utilizamos:

96 CAPÍTULO 3. LIMITES E CONTINUIDADE
>discont(função, x);
Vamos a prestar atenção à diferença de terminologia empregada nas Ciências Aplicadas, comoEngenharia e Física, e daquela usada em Matemática.
Considere uma função racional f(x) =g(x)
h(x), onde g e h são contínuas e a ∈ R tal que h(a) = 0,
se existe δ > 0 tal que se (a− δ, a + δ)∩(
A−{a})
6= ∅, então faz sentido perguntar se f admiteuma extensão contínua que esteja definida no ponto a; isto é, se existe F tal que F (x) = f(x)para todo x ∈ Dom(f) = A e F (a) exista e seja contínua nesse ponto. Isso foi o que MAPLEexecutou no exemplo, onde substituiu:
f(x) =x2 − 1
x − 1por F (x) = x + 1.
É claro que na prática, se existe a extensão contínua, iremos sempre substituir a função originalpor sua extensão contínua.
Porém, nas Ciências Aplicadas, a terminologia empregada é outra. É comum usarem a palavradescontinuidade para os pontos que anulam o denominador da função e perguntarem se ftem descontinuidade removível em a. No exemplo a seguir, empregaremos a terminologiadas Ciências Aplicadas. Achar “os pontos onde f é descontínua” é equivalente a determinar odomínio da função racional f e achar os pontos que anulam o seu denominador.
O comando discont( ), exclui de R os pontos que anulam no denominador de f e, futuramente,iremos perguntar se f admite uma extensão contínua a esses pontos.
Exemplo 3.6.
1. Determine os pontos onde f(x) =x2 − 5
x4 + 2x3 − 17x2 − 18x + 72é descontínua.
q:=(x ˆ 2-5)/(x ˆ 4+2*x ˆ 3-17*x ˆ 2-18*x+72):
>discont(q,x);
{−4,−3, 2, 3}2. Verifique se a função :
f(x) =
{
x2 se x ≤ 2
x2 + 2 se x > 2
é contínua.
> k:=piecewise(x<=2,x ˆ 2,x>2,x ˆ 2 +2);
k :=
{
x2 x ≤ 2
x2 + 2 x > 2

3.6. CONTINUIDADE 97
>discont(k,x);
{2}>iscont(k,x=0..3);
false
>iscont(k,x=2.1..infinity);
true
>iscont(k,x=-infinity..1.9);
true
De fato, calculemos diretamente:
> limit(k,x=2,left);
4
> limit(k,x=2,right);
6
Logo, os limites laterais não são iguais; portanto, a função é descontínua em x0 = 2. Para ver ográfico:
>plot(k, x = -4 .. 4, thickness = 3, color = blue, discont = true);
Figura 3.16: Exemplo 1.
2. Determine a constante c, tal que:
f(x) =
x2 sen(1
x) se x 6= 0
c se x = 0

98 CAPÍTULO 3. LIMITES E CONTINUIDADE
seja contínua.
> k1:=piecewise(x<>0,x ˆ 2 *sin(1/x),c);
k1 :=
x2 sen(1
x) se x 6= 0
c otherwise
> limit(k1,x=0,left);
0
> limit(k1,x=0,right);
0
Logo, definimos c = 0 e:
k1 :=
x2 sen(1
x) se x 6= 0
0 otherwise
>iscont(k1,x=-infinity..infinity);
true
Para ver o gráfico:
>plot(k1, x = -0.2 .. 0.2, thickness = 3, color = blue);
Figura 3.17: Exemplo 2.
3. Seja
f(x) =
1
(x − 1)2se x 6= 1
4 se x = 1.
Verifique se f é contínua em 1.

3.6. CONTINUIDADE 99
> k2:=piecewise(x=1,4,1/(x-1)ˆ2);
k2 :=
4 x = 11
(x − 1)2otherwise
> limit(k2,x=1,left);
∞
> limit(k2,x=1,right);
∞
Por outro lado, f(1) = 4; logo, a função não é contínua em 1.
>plot(k2, x = -1 .. 2.5, color = blue, thickness = 3, discont = true, view = [-1 .. 2.5, 0 .. 10]);
Figura 3.18: Exemplo 3.
4. Seja
f(x) =
2 se x ≤ −1
Ax + B se − 1 < x < 3
−2 se x ≥ 3.
Determine A e B tais que f seja uma função contínua em R.
Os pontos problemáticos do domínio de f são x = −1 e x = 3. Utilizando a definição, f écontínua se:
limx→−1−
f(x) = limx→−1+
f(x) = f(−1)
limx→3−
f(x) = limx→3+
f(x) = f(3),
Digitamos:
> z1:=piecewise(x<=-1,2, -1<x and x<3,A*x+B,x>=3,-2);

100 CAPÍTULO 3. LIMITES E CONTINUIDADE
z1 :=
2 x ≤ −1
Ax + B −1 < x and x < 3
−2 x ≥ 3.
> eq1:=limit(z1,x=-1,left)=limit(z1,x=-1,right);
eq1 := −A + B = 2
> eq2:=limit(z1,x=3,left)=limit(z1,x=3,right);
eq1 := 3A + B = −2
> solve({eq1,eq2},A, B);
{A = −1} {B = 1}Logo, temos:
z1 :=
2 x ≤ −1
1 − x −1 < x and x < 3
−2 x ≥ 3.
Figura 3.19: Exemplo 3.

3.7. EXERCÍCIOS 101
3.7 Exercícios
1. Calcule os seguintes limites usando tabelas:
(a) limx→1
x3 − 2x2 + 5x − 4
x − 1
(b) limx→0
(
x2 − 2x
1000
)
(c) limx→0
tg(4x)
x
(d) limx→1
(x + 2)2
x
(e) limx→0
3x − 1
x2 + x + 2
(f) limx→1
(x2 − 1)
x − 1
2. Calcule os seguintes limites:
(a) limx→1
4x5 + 9x + 7
3x6 + x3 + 1
(b) limx→2
x3 + 3x2 − 9x − 2
x3 − x − 6
(c) limx→3
x2 − 9
x2 − 3x
(d) limx→1
2x2 − 3x + 1
x − 1
(e) limx→0
x2 − a2
x2 + 2 ax + a2
(f) limx→0
x6 + 2
10x7 − 2
(g) limx→2
2 − x
2 −√
2x
(h) limh→0
(t + h)2 − t2
h
(i) limx→1
x4 − 1
3x2 − 4x + 1
(j) limx→2
8 − x3
x2 − 2x
(k) limx→−1
x + 1√6x2 + 3 + 3x
(l) limx→0
√9 + 5x + 4x2 − 3
x
(m) limx→0
√x + 4 − 2
x
(n) limx→7
2 −√
x − 3
x2 − 49
(o) limx→1
x4 + x3 − x − 1
x2 − 1
3. Verifique se os seguintes limites existem:
(a) limx→1
x3 − 1
|x − 1|(b) lim
x→3|x − 3|
(c) limx→1
x2 − 3x + 2
x − 1
(d) limx→5
x3 − 6x2 + 6x − 5
x2 − 5x
(e) limx→−4
x2 + 3x − 4
x3 + 4x2 − 3x − 12
(f) limx→8
x − 83√
x − 2
(g) limx→0
(cos(x) − [[sen(x)]])
(h) limx→0
(sen(x) − [[cos(x)]])
(i) limx→0+
x
a
∣
∣
b
x
∣
∣
(j) limx→0+
[[x
a]]
4. Calcule os seguintes limites no infinito:

102 CAPÍTULO 3. LIMITES E CONTINUIDADE
(a) limx→+∞
2x3 + 5x + 1
x4 + 5x3 + 3
(b) limx→+∞
3x4 − 2√x8 + 3x + 4
(c) limx→−∞
x2 − 2x + 3
3x2 + x + 1
(d) limx→+∞
x
x2 + 3x + 1
(e) limx→+∞
√x2 + 1
3x + 2
(f) limx→−∞
√x2 + 1
3x + 2
(g) limx→+∞
√x + 3
√x
x2 + 3
(h) limx→+∞
(x −√
x2 + 1)
(i) limx→−∞
3
√
x
x2 + 3
(j) limx→+∞
3√
x3 + 2x − 1√x2 + x + 1
5. Calcule os seguintes limites infinitos:
(a) limx→−∞
5x3 − 6x + 1
6x2 + x + 1(b) lim
x→+∞m√
x
(c) limx→3+
5
3 − x
(d) limx→0+
2x + 1
x
(e) limx→1+
2x + 3
x2 − 1
(f) limx→1−
2x + 3
x2 − 1
(g) limx→3+
x2 − 3x
x2 − 6x + 9
(h) limx→2+
x2 − 4
x2 − 4x + 4
(i) limx→0+
sen(x)
x3 − x2
(j) limx→0+
ln(x)
x
(k) limx→0
ln(|x|)
6. Se f(x) = 3x − 5 e g(x) =x
2− 2
3, calcule:
(a) limx→1
(f + g)(x)
(b) limx→1
(g − f)(x)
(c) limx→1
(g f)(x)
(d) limx→1
(f
g
)
(x)
(e) limx→1
( g
f
)
(x)
(f) limx→1
(f f)(x)
(g) limx→2
(f ◦ g)(x)
(h) limx→2
(g ◦ f)(x)
(i) limx→− 3
2
(f ◦ g ◦ f)(x)
(j) limx→2
ln(|f(x)|)
(k) limx→ 4
3
cos( g(x)
f(x)
)
(l) limx→0
x sen( 1
g(x)
)
7. Calcule os seguintes limites:

3.7. EXERCÍCIOS 103
(a) limx→π
sen(x)
x − π
(b) limx→+∞
x sen(1
x)
(c) limx→0
x − tg(x)
x + tg(x)
(d) limx→+∞
(1 +2
x)x+1
(e) limx→0
(
1 +1
2x
)x
(f) limx→0
(1 + 2x)1x
(g) limx→0
e2x − 1
x
(h) limx→0
ex2 − 1
x
(i) limx→0
5x − 1
x
(j) limx→0
3x − 1
x2
(k) limx→0
eax − ebx
sen(ax) − sen(bx), a, b 6= 0
(l) limx→0
x cos2(x)
(m) limx→0
tg2(x)
x2 sec(x)
(n) limx→+∞
(1 − 4
x)x+4
(o) limx→−∞
(1 − 1
x)x
8. Calcule limx→a
f(x) − f(a)
x − ae lim
t→0
f(t + a) − f(a)
t, se:
(a) f(x) = x2, a = 2
(b) f(x) = x2 + 1, a = 2
(c) f(x) = 3x2 − x, a = 0
(d) f(x) = |x|2, a = 2
(e) f(x) =√
x, a = 1
(f) f(x) = x (1 − x), a = 1
(g) f(x) = cos(x), a = π
(h) f(x) = (x − 3)2, a = 1
(i) f(x) = ln(x), a = 1
(j) f(x) = e2x, a = 0
9. Durante uma epidemia de dengue, o número de pessoas que adoeceram, num certobairro, após t dias é dado por:
L(t) =100000
1 + 19900 e−0.8t
(a) Determine a quantidade máxima de indivíduos atingidos pela doença.
(b) Esboce o gráfico de L.
10. Esboce o gráfico das seguintes funções:
(a) y =1
(x − 1) (x3 + 1)
(b) y =x
(x − 1) (x3 + 1)
(c) y =1
(x − 3) (x + 2) (x2 + 1)
(d) y =x2
(x − 3) (x + 2) (x2 − 1)

104 CAPÍTULO 3. LIMITES E CONTINUIDADE
11. Verifique se as seguintes funções são contínuas:
(g) f(x) =
{
2x se x ≤ 1
1 se x > 1
(h) f(x) =
x2 − 4
x − 2se x 6= 2
4 se x = 2
Esboce os gráficos correspondentes.
12. Seja f(x) = x3 + x. Verifique que:
(a) |f(x) − f(2)| ≤ 20 |x − 2| se 0 ≤ x ≤ 3 (b) f é contínua em 2.
13. Determine o valor de L para que as seguintes funções sejam contínuas nos pontos dados:
(a) f(x) =
x2 − x
xse x 6= 0
L se x = 0, no ponto x = 0.
(b) f(x) =
x2 − 9
x − 3se x 6= 3
L se x = 3, no ponto x = 3.
(c) f(x) =
{
x + 2L se x ≥ −1
L2 se x < −1, no ponto x = −1.
(d) f(x) =
{
4 3x se x < 0
2L + x se x ≥ 0, no ponto x = 0.
14. Verifique se as seguintes funções são contínuas.
(a) f(x) =
sen(x)
xx 6= 0
0 x = 0
(b) f(x) =
|x2 − 5x + 6|x2 − 5x + 6
x 6= 2, 3
1 x = 2
9 x = 3
(c) f(x) =
1 − x
1 − x3x 6= 1
1 x = 1
(d) f(x) =
1 − x2 x < −1
ln(2 − x2) −1 ≤ x ≤ 1√
x − 1
x + 1x > 1
15. Seja f(x) = 1 − x sen(1
x
)
, x 6= 0. Como escolher o valor de f(0), para que a função f
possa ser definida em x = 0 e seja contínua no ponto?

3.7. EXERCÍCIOS 105
16. Sendo f(x) = arctg( 1
x − 2
)
, x 6= 2, é possível escolher o valor de f(2) tal que a função f
possa ser definida em x = 2 e seja contínua no ponto?
17. A função sinal de x é definida por:
sgn(x) =
1 se x > 0
0 se x = 0
−1 se x < 0.
Verifique se f(x) = x sgn(x) e g(x) = x2 sgn(x) são funções contínuas.
18. Verifique que a equação x = tg(x) tem uma infinidade de raízes reais.
19. Uma esfera oca de raio R está carregada com uma unidade de eletricidade estática. Aintensidade de um campo elétrico E(x) num ponto P localizado a x unidades do centroda esfera é determinada pela função:
E(x) =
0 se 0 < x < R1
3x2se x = R
x−2 se x > R.
Verifique se a função E = E(x) é contínua. Esboce o gráfico de E.
20. A função de Heaviside é utilizada no estudo de circuitos elétricos para representar osurgimento de corrente elétrica ou de voltagem, quando uma chave é instantaneamenteligada e, é definida por:
H(t) =
{
0 se t < 0
1 se t ≥ 0
(a) Discuta a contínuidade de f(t) = H(t2 + 1) e de g(t) = H(sen(π t)). Esboce os respec-tivos gráficos em [−5, 5].
(b) A função R(t) = c t H(t) (c > 0) é chamada rampa e representa o crescimento gradualna voltagem ou corrente num circuito elétrico. Discuta a continuidade de R e esboce seugráfico para c = 1, 2, 3.
(c) Verifique que uc(t) = H(t − c).
(d) Se h(t) =
{
f(t) se 0 ≤ t < c
g(t) se t ≥ c, verifique que h(t) = (1 − uc(t)) f(t) + uc(t) g(t).

106 CAPÍTULO 3. LIMITES E CONTINUIDADE

Capítulo 4
DERIVADA
Seja:
f : A −→ R
uma função definida num domínio A e x0 ∈ A. Suponha que para todo intervalo aberto I quecontenha x0, se tenha: I ∩ (A − {x0}) 6= ∅.
4.1 Retas Secantes
Da Geometria Analítica elementar sabemos que o coeficiente angular da reta, que passa pelospontos P = (x0, f(x0)) e q = (x, f(x)) é:
msec =f(x) − f(x0)
x − x0
Fazendo a mudança h = x − x0, temos:
msec =f(x0 + h) − f(x0)
h.
A reta secante ao gráfico de f , que passa por (x0, f(x0)) e (x0 + h, f(x0 + h)) é definida por:
y = msec (x − x0 − h) + f(x0 + h)
Observamos que h será usado como parâmetro. Veja os exemplos a seguir:
Exemplo 4.1.
1. Determine as retas secante a f(x) = x2 − 3x − 4, no ponto (0,-4).
>with(plots):
>f:=x->x ˆ 2-3*x-4:
>x0:=0:
107
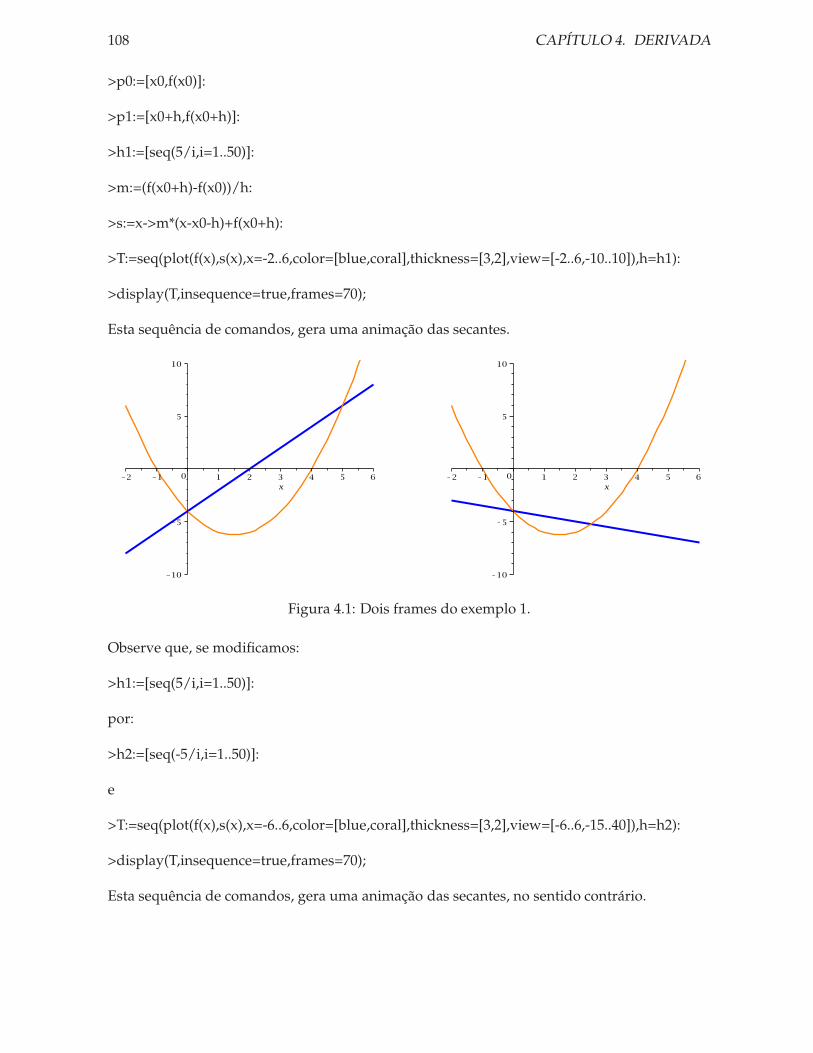
108 CAPÍTULO 4. DERIVADA
>p0:=[x0,f(x0)]:
>p1:=[x0+h,f(x0+h)]:
>h1:=[seq(5/i,i=1..50)]:
>m:=(f(x0+h)-f(x0))/h:
>s:=x->m*(x-x0-h)+f(x0+h):
>T:=seq(plot(f(x),s(x),x=-2..6,color=[blue,coral],thickness=[3,2],view=[-2..6,-10..10]),h=h1):
>display(T,insequence=true,frames=70);
Esta sequência de comandos, gera uma animação das secantes.
Figura 4.1: Dois frames do exemplo 1.
Observe que, se modificamos:
>h1:=[seq(5/i,i=1..50)]:
por:
>h2:=[seq(-5/i,i=1..50)]:
e
>T:=seq(plot(f(x),s(x),x=-6..6,color=[blue,coral],thickness=[3,2],view=[-6..6,-15..40]),h=h2):
>display(T,insequence=true,frames=70);
Esta sequência de comandos, gera uma animação das secantes, no sentido contrário.

4.1. RETAS SECANTES 109
Figura 4.2: Dois frames do exemplo 1.
2. Determine as retas secante a f(x) = sen(x), no ponto (π
2, 1).
>with(plots):
>f:=x->sin(x):
>x0:=Pi/2:
>p0:=[x0,f(x0)]:
>p1:=[x0+h,f(x0+h)]:
>h1:=[seq(3/i,i=1..50)]:
>m:=(f(x0+h)-f(x0))/h:
>s:=x->m*(x-x0-h)+f(x0+h):
>T:=seq(plot(f(x),s(x),x=-.5..4,y=-1..1.5,color=[blue,red],thickness=[3,2]),h=h1):
>display(T,insequence=true,frames=70);
Esta sequência de comandos, gera uma animação das secantes.

110 CAPÍTULO 4. DERIVADA
Figura 4.3: Dois frames do exemplo 1.
4.2 Reta Tangente
Com as hipóteses iniciais; considere P = (x0, f(x0)) e Qi = (xi, f(xi)) (i = 1, 2, 3......) pontosno gráfico de f , P 6= Qi; seja r1 a reta secante que passa por P e Q1; seu coeficiente angular é:
m1 =f(x1) − f(x0)
x1 − x0.
Fixemos o ponto P e façamos o ponto Q1 se mover sobre o gráfico de f em direção a P , até umnovo ponto Q2 = (x2, f(x2)) tal que Q2 6= P . Seja r2 a reta secante que passa por P e Q2; seucoeficiente angular é:
m2 =f(x2) − f(x0)
x2 − x0.
Suponha que os pontos Qi (i = 1, 2, 3......) vão se aproximando sucessivamente do ponto P(mas sem atingir P ), ao longo do gráfico de f ; repetindo o processo obtemos r1, r2, r3, ..., retassecantes de coeficientes angulares m1, m2, m3, ..., respectivamente.
Vamos supor que, a medida que os pontos Qi vão se aproximando cada vez mais do ponto P ,os mi respectivos tendam a um valor limite constante, que denotaremos por mx0 .
Definição 4.1. A reta passando pelo ponto P e tendo coeficiente angular mx0 , é chamada reta tangenteao gráfico de f no ponto (x0, f(x0)).
Se
mx0 = limx→x0
f(x) − f(x0)
x − x0
existe. Como x0 é um ponto arbitrário, podemos calcular o coeficiente angular da reta tangenteao gráfico de f para qualquer ponto (x, f(x)):
4.2. RETA TANGENTE 111
mx = limt→0
f(x + t) − f(x)
t
Assim, mx só depende x.
Definição 4.2. Se f for contínua em x0, então, a equação da reta tangente ao gráfico de f no ponto(x0, f(x0)) é:
y − f(x0) = mx0 (x − x0)
se o limite dado na definição anterior, existe.
Podemos gerar as retas tangentes ao gráfico de uma função, apenas modificando:
>m:=(f(x0+h)-f(x0))/h:
no traçado das retas secantes, por:
>m:=limit((f(x0+h)-f(x0))/h,h=0):
Ou, utilizamos a seguinte sintaxe:
>with(student):
>showtangent(função, x=ponto,opções);
Exemplo 4.2.
1. Seja f(x) = x2 − 3x − 4 e esbocemos as retas tangentes, nos pontos x = 0, −1, 1, −3, 3.
>with(student):
>with(plots):
>f:=x ˆ 2-3*x-4:
>a1:=showtangent(f,x=0,thickness=2):
>a2:=showtangent(f,x=-1,thickness=2):
>a3:=showtangent(f,x=1,thickness=2):
>a4:=showtangent(f,x=-3,thickness=2):
>a5:=showtangent(f,x=3,thickness=2):
>display(a1,a2,a3,a4,a5);

112 CAPÍTULO 4. DERIVADA
Figura 4.4: Exemplo 1.
Para gerar uma sequência de retas tangentes, podemos utilizar:
>retan:=seq(showtangent(f1, x = i), i = -8 .. 8):
>display(lista, title = ‘ Retas Tangentes a f(x)‘)
Figura 4.5: Exemplo 1.
2. Seja h(x) = x (x2 − 1), façamos uma animação das retas tangentes à h = h(x).
>with(plots):
>h:=x*(x ˆ 2-1):
>g1:=limit((f(x+h)-f(x))/h, h = 0):

4.2. RETA TANGENTE 113
>g2 := subs(x = t, g1):
>g := unapply(g2, t);
g := t 7→ 3 t2 − 1
>ta :=f(t)+g(t)*(x-t);
ta := t 7→ t(
t2 − 1)
+(
3 t2 − 1)
(x − t)
>animate(plot, [f(x), ta(t), x = -1.3 .. 1.3, color = [blue, red], thickness = [3, 2]], t = -1 .. 1,frames = 50, view = [-1.3 .. 1.3, -.5 .. 1]);
Figura 4.6: Dois frames do exemplo 2.
Da definição, segue que a equação da reta normal ao gráfico de f no ponto (x0, f(x0)) é:
y − f(x0) = − 1
mx0
(
x − x0
)
, se mx0 6= 0
Exemplo 4.3.
1. Considere h(x) = x (x2 − 1), façamos uma animação das retas normais à h = h(x).
>with(plots):
>h:=x*(x ˆ 2-1):
>g1:=limit((f(x+h)-f(x))/h, h = 0):
>g2 := subs(x = t, g1):
>g := unapply(g2, t);
g := t 7→ 3 t2 − 1

114 CAPÍTULO 4. DERIVADA
>no:=f(t)-(1/g(t))*(x-t);
no := t 7→ t(
t2 − 1)
− x − t
3 t2 − 1
>animate(plot, [f(x), no(t), x = -1.3 .. 1.3, color = [blue, red], thickness = [3, 2]], t = -1 .. 1,frames = 50,view = [-1.3 .. 1.3, -.5 .. 1]);
Figura 4.7: Dois frames do exemplo 2.
O MAPLE 13, possui uma livraria que calcula, automaticamente, a reta tangente ao gráfico deuma função, num ponto dado. A sintaxe é:
>with(Student[Calculus1]):
>Tangent(expressão,x=ponto);
Exemplo 4.4.
1. Determine a reta tangente à f(x) = arctg(x3 + x − 1), nos pontos x0 = −1, x = 0 e x0 = 1.
>with(Student[Calculus1]):
>p:=arctan(xˆ3+x-1):
>Tangent(p, x = -1);
2
5x + arctan(3) +
2
5
>Tangent(p, x = 0);
1
2x − 1
4π
>Tangent(p, x = 1);

4.2. RETA TANGENTE 115
2x +1
4π − 2
Verifique as respostas!
Figura 4.8: Exemplo 1.
2. Determine a reta tangente á f(x) =x6 − 3x5 + x3 + x − 1
x4 + 1, nos pontos x0 = −1, x0 = 0 e
x0 = 1.
>with(Student[Calculus1]):
>p:=(xˆ6-3*xˆ5+xˆ3+x-1)/(xˆ4+1):
>q:=seq(Tangent(p, x = i),i=-1..1);
−15
2x − 7, x − 1, −3
2x + 1
Verifique as respostas! Para esboçar os gráficos, façamos:
>with(plots):
>s:={q}:
>a1 := plot(p, x = -2 .. 2, color = blue, thickness = 3):
>a2 := plot(s, x = -2 .. 2, thickness = [2, 2, 2]):
>display(a2, a1, view = [-2 .. 2, -4 .. 5]);

116 CAPÍTULO 4. DERIVADA
Figura 4.9: Exemplo 2.
4.3 Funções Deriváveis
Definição 4.3. Seja f : A −→ R uma função definida num domínio A e x0 ∈ A. Suponhamos que paratodo intervalo aberto I que contenha x0, se tenha: I∩(A−{x0}) 6= ∅. f é derivável ou diferenciávelno ponto x0 quando existe o seguinte limite:
f ′(x0) = limx→x0
f(x) − f(x0)
x − x0
Fazendo a mudança t = x − x0, temos:
f ′(x0) = limt→0
f(x0 + t) − f(x0)
t.
f ′(x0) é chamada a derivada de f no ponto x0. Como x0 é um ponto arbitrário, podemoscalcular a derivada de f para qualquer ponto x ∈ Dom(f);
f ′(x) = limt→0
f(x + t) − f(x)
t
Assim f ′ é função de x e f ′(x0) ∈ R.
Definição 4.4. Uma função f é derivável (ou diferenciável) em A ⊂ R, se é derivável ou diferenciávelem cada ponto x ∈ A.
Outras notações para a derivada de y = y(x) são:dy
dxou D(f).

4.4. SINTAXES QUE ENVOLVEMA DERIVADA 117
4.4 Sintaxes que envolvem a Derivada
A sintaxe da derivada de uma função ou uma espressão, é:
>diff(função,variável);
Como no caso dos limites, podemos reescrever as derivadas, em forma mais didática, utili-zando a sintaxe:
>Diff(função,variável)=diff(função,variável);
O MAPLE, possui todas as regras de derivação, por exemplo:
A regra do produto:
>Diff(f(x)*g(x),x)=diff(f(x)*g(x),x);
d
dx(f (x) g (x)) =
(
d
dxf (x)
)
g (x) + f (x)
(
d
dxg (x)
)
A regra do quociente:
>Diff(f(x)/g(x),x)=diff(f(x)/g(x),x);
d
dx
(
f (x)
g (x)
)
=
(
ddxf (x)
)
g (x) − f (x) ddxg (x)
(g (x))2
Para derivadas sucessivas, utilizamos:
>diff(função,variável$n);
onde n é a ordem da derivada.
Exemplo 4.5.
1. Determine as 7 primeiras derivadas de f(x) = ln(x); digitamos:
>seq(diff(ln(x), x$n),n=1..7);
1
x, − 1
x2,
2
x3, − 6
x4,
24
x5, −120
x6,
720
x7
De forma alternativa, podemos digitar:
>diff(ln(x),x), diff(ln(x),x$2), ...., diff(ln(x),x$7);
2. Calcule a n-ésima derivada de f(x) = e2x; digitamos:
>Diff(exp(2*x),x$n)=diff(exp(2*x),x$n);

118 CAPÍTULO 4. DERIVADA
dn
dxne2 x = 2ne2 x
3. Calcule a n-ésima derivada de f(x) = sen(x); digitamos:
>Diff(sin(x),x$n)=diff(sin(x),x$n);
dn
dxnsin(x) = sin(x +
1
2nπ)
Pode explicar o resultado?
4. Estude a diferenciabilidade de:
f(x) =
x
1 + e1/xse x 6= 0
0 se x = 0
A função é contínua em R e diferenciavél se x 6= 0; logo, o único ponto problemático é x = 0.
>plot(f, x = -1 .. 1, view = [-1 .. 1, -0.4 ..0.4], axes = box, thickness = 3, color = blue,discont=true);
Figura 4.10: Gr afico de f .
>f1:=x->x/(1+exp(1/x)):
>p:=f1(h)/h;
p :=1
1 + e1/h
>Limit(p,h->0,left);
1
>Limit(p,h->0,right);

4.4. SINTAXES QUE ENVOLVEMA DERIVADA 119
0
Logo, a função f não é derivavél em x = 0. A função f deve ter uma quina na origem.
5. Estude a diferenciabilidade de: h(x) = arctg(x + 1
x − 1
)
.
Note que a função não é contínua em x = 1, logo, não é derivável em x = 1. Por outro lado:
>h:=x->arctan((x+1)/(x-1)):
>p:=simplify(diff(h(x),x));
p := − 1
1 + x2
>Limit(p,x=1,left)=limit(p,x=1,left);
limx→1−
− 1
1 + x2= −1
2
>Limit(p,x=1,right)=limit(p,x=1,right);
limx→1+
− 1
1 + x2= −1
2
Pode explicar o resultado?
>plot(p, x = -2 .. 3, discont = true, thickness = 3, color = blue);
Figura 4.11: Exemplo 5.
6. Esboce a reta tangente e a reta normal a f(x) = x3 − 5x + 1, no ponto x0 = 1; digitamos:
>with(plots):
>f:=x->x ˆ 3 -5*x+1:

120 CAPÍTULO 4. DERIVADA
>p:=diff(f(x),x):
>h:=unnaply(p,x);
h := x 7→ 3x2 − 5
>ta:=f(1)+h(1)*(x-1);
ta := −1 − 2x
>no:=f(1)-(1/h(1)) *(x-1);
no := −7
2+
1
2x
>a1:= plot(no(x), ta(x), x = -8 .. 8, y = -8 .. 8, color = [coral, red], thickness = [2, 2]):
>a2 := plot(f(x), x = -3 .. 3, color = blue, thickness = 3):
>display(a1,a2);
Figura 4.12: Exemplo 6.
7. (Serpentina de Newton). Seja f(x) =8x
x2 + 1:
(a) Determine os pontos do gráfico onde o coeficiente angular é igual a 3.
(b) Determine as equações das retas tangente e normal nos pontos de (a).
(a) Digitamos:
>f:=x->8*x/(x ˆ 2 +1):
>simplify(diff(f(x),x)):

4.4. SINTAXES QUE ENVOLVEMA DERIVADA 121
>m:=unapply( ,x);
m := x 7→ −8x2 − 1
(x2 + 1)2
>with(RealDomain):
>solve(m(x)=3,{x});
{x = −1
3
√3}, {x =
1
3
√3}
>x0=-sqrt(3)/3,x1:=sqrt(3)/3:
>ta:=z->f(z)+m(z)*(x-2):
>no:=z->f(z)-(1/m(z))*(x-2):
>ta0:=ta(x0);
ta0 := −√
(3) + 3x
>ta1:=ta(x1);
ta1 := 3x +√
3
>no0:=no(x0);
no0 := −19
9
√3 − 1/3x
>no1:=no(x1);
no1 :=19
9
√3 − 1/3x

122 CAPÍTULO 4. DERIVADA
Figura 4.13: Exemplo 7.
4.4.1 O Operador Diferencial
O operador diferencial D calcula a derivada de operadores e não de funções. Não confundircom diff, que calcula a derivada de funções. O argumento e o resultado deD são operadores.
A sintaxe é:
D(expressão,variável);
A derivada de ordem n, tem a seguinte sintaxe:
>D@@n;
Exemplo 4.6.
1. Note a diferenças:
>D(g @f);
(D (g) ◦ f)D (f)
>diff(g @f);
Error, invalid input: diff expects 2 or more arguments, but received 1
>diff((g @f)(x),x);
D (g) (f (x))d
dxf (x)

4.4. SINTAXES QUE ENVOLVEMA DERIVADA 123
2. Digite
>D(f)(x);
D (f) (x)
>convert( , diff);
d
dxf (x)
agora, se digitamos:
>D(f)(0);
D (f) (0)
>convert( , diff);
d
dt1f(t1)
∣
∣
∣
∣
t1=0
3. Digite
>D(arctan);
z 7→ 1
1 + z2
Pode explicar?
4. Digite:
>Id:=x->x:
>H:=Id+D-D@@2+6*D@@3-D@@4;
Id + D − D(2) + 6D(3) − D(4)
H deve ser aplicado em funções, por exemplo:
>f:=x->sin(3*x):
>H(f)(x);
−71 sin(3x) − 159 cos(3x)
Agora H(f) é uma função e pode ser calculada em algum valor:
>H(f)(Pi);

124 CAPÍTULO 4. DERIVADA
159
Considere:
>g:=x->xˆ2*cosh(x):
>H(g)(x);
−x2 cosh(x) + 38x cosh(x) + 7x2 sinh(x) − 14 cosh(x) − 12x sinh(x) + 36 sinh(x)
>H(g)(0);
−14
No exemplo 3, podemos calcular:
>D(arctan)(Pi);
1
1 + π2
4.5 Regra da Cadeia
Sejam f e g funções, tais que g ◦ f esteja bem definida. Se f é derivável em x e g é derivável emf(x), então g ◦ f é derivável em x e:
(g ◦ f)′(x) = g′(f(x)) · f ′(x)
Outra maneira de escrever o último parágrafo é: se y = g(x) e x = f(t), nas hipóteses doteorema, temos que:
dy
dt=
dy
dx
dx
dt
OMAPLE já tem a regra da cadeia:
>Diff((g @f)(x),x)=diff((g @ f)(x),x);
d
dxg (f (x)) = D (g) (f (x))D (f) (x)
Exemplo 4.7.
1. Calcule a derivada de f(x) = ln(cos(α(x))); digitamos:
>p:= ln(cos(alpha(x))):
>Diff(p, x)=diff(p, x);

4.6. DERIVAÇÃOS IMPLÍCITA 125
d
dxln (cos (α (x))) = −sin (α (x)) d
dxα (x)
cos (α (x))
2. Calcule a derivada de f(x) = arctg(α(x))); digitamos:
>p:= arctan(alpha(x)):
>Diff(p, x)=diff(p, x);
d
dxarctan (α (x)) =
ddxα (x)
1 + (α (x))2
3.Calcule y′ se y = x4 − 2x3 + 2 e x = x(t) = t sen(t).
>f:=x->xˆ4 -2*x ˆ 3+2:
>x:=t->t*sin(t):
>h:=f(x(t)):
>simplify(diff(h,x)
2 (sin (t))2t2(
−2 (cos (t))2 t + 2 sin (t) cos (t) t2 − 3 t cos (t) + 2 t − 3 sin (t))
4.6 Derivaçãos Implícita
Seja F (x, y) = 0 uma equação nas variáveis x e y.
Definição 4.5. A função y = f(x) é definida implicitamente pela equação F (x, y) = 0, quando
F (x, f(x)) = 0.
Em outras palavras, quando y = f(x) satisfaz à equação F (x, y) = 0.
Se F (x, y) = 0, define implicitamente, uma função derivável y = f(x), a sintaxe para calcular aderivada da função definida implicitamente é:
>implicitdiff(expressão, y, x);
onde y é a variável dependente e x a variável independente. Em geral:
>implicitdiff({f1,...,fm}, {y1,...,yn}, x1,...,xk) ;
Observemos que nada garante que uma função definida implicitamente seja contínua, deri-vável, etc. Na verdade, nem sempre uma equação F (x, y) = 0 define implicitamente algumafunção. Por exemplo, considere a seguinte equação:
x3 y6 + x3 tg(x y2) + ln(x + y) + sen(x) = 0.

126 CAPÍTULO 4. DERIVADA
Exemplo 4.8.
Calcule a derivada das funções definidas implícitamente, se y = f(x) é uma função derivável:
1. x3 − 3x2 y4 + y3 = 6x + 1; digitamos
>F:=x ˆ 3 - 3*x ˆ 2 *y ˆ 4 +y ˆ 3 =6*x+1:
> implicitdiff(F, y, x);
2 − x2 + 2x y4
y2 (1 − 4x2 y)
2. x2 + x y + x sen(y) = y sen(x); digitamos
>F:=x ˆ 2+x*y +x*sin(y)=y*sin(x):
> implicitdiff(F, y, x);
−−2x − y − sin (y) + y cos (x)
−x − x cos (y) + sin (x)
O processo de derivar implicitamente pode ser usado somente se a função determinada pelaforma implícita é derivável. Mas, para os exemplos e exercícios, sempre consideraremos estaexigência satisfeita.
Exemplo 4.9.
1. (Folium de Descartes). Ache a equação da reta tangente à função definida implicitamentepor:
x3 + y3 = 6x y,
no ponto (3, 3).
>F:=x ˆ 3 +y ˆ 3 =6*x*y:
> implicitdiff(F, y, x);
−x2 + 2 y
y2 − 2x
>m := subs(x = 3, y = 3, );
m := −1
>ta:=3+m*(x-3);
ta := 6 − x
>with(plots):

4.6. DERIVAÇÃOS IMPLÍCITA 127
>a1:=implicitplot(F=0,x=-5..7,y=-6..6,thickness=3,color=blue,gridrefine=3):
Pesquise a opção gridfine.
>a2 := plot(ta(x), x = -4 .. 7, thickness = 2):
>display(a1,a2);
Figura 4.14: Folium de Descartes.
2. (Lemniscata de Bernoulli). Ache a equação da reta tangente à função definida implicita-mente por:
2 (x2 + y2)2 = 25 (x2 − y2),
no ponto (3, 1).
>F:=2*(x ˆ 2 +y ˆ 2)ˆ 2 =25*(x ˆ 2-y ˆ 2):
> implicitdiff(F, y, x);
−x(
4x2 + 4 y2 − 25)
y (4x2 + 4 y2 + 25)
>m := subs(x = 3, y = 1, );
m := − 9
13
>ta:=1+m*(x-3);
ta :=40
13− 9
13x
>with(plots):
>a1:=implicitplot(F, x = -4 .. 4, y = -2 .. 4, thickness = 3, color = blue, gridrefine = 3):

128 CAPÍTULO 4. DERIVADA
>a2 :plot(ta(x), x = -4 .. 6, y = -2 .. 4, thickness = 2):
>display(a1,a2);
Figura 4.15: Lemniscata de Bernoulli.
4.7 Aproximação Linear
É intuitivo pensar que uma função derivável restrita a um pequeno intervalo contido em seudomínio "comporta-se"como uma função polinomial do primeiro grau.
Por exemplo, consideremos y = f(x) = x2. Estudando f num pequeno intervalo contendox = 1, por exemplo I = [0.99, 1.01], obtemos:
x f(x)
0.99 0.98010.999 0.998001
1 11.001 1.00020011.01 1.0201
A reta tangente ao gráfico de f no ponto x = 1 é dada por y = 2x − 1; seu coeficiente angularé 2. Determinemos os coeficientes angulares das retas passando pelos pontos (0.999, f(0.999)),(1, f(1)) e (1.001, f(1.001)), (1, f(1)), respectivamente:
m1 =f(1) − f(0.999)
1 − 0.999= 1.9990
m2 =f(1.001) − f(1)
1.001 − 1= 2.0010.
m1 e m2 são valores bastante próximos de 2. Observe que se |x − 1| → 0 (x perto de 1), entãof(x) = x2 fica próxima de y = 2x − 1. De fato:

4.7. APROXIMAÇÃO LINEAR 129
limx→1
|f(x) − y| = limx→1
|x2 − 2x + 1| = 0.
Isto nos leva a estabelecer a seguinte definição:
Definição 4.6. Seja y = f(x) uma função derivável em x0. A aproximação linear de f em torno de x0
é denotada por l(x) e definida por:
l(x) = f(x0) + f ′(x0) (x − x0)
se x ∈ (x0 − ε, x0 + ε), ε > 0 pequeno.
A função l(x) também é chamada linearização de f ao redor ou em torno do ponto x0.
A proximidade de f(x) e l(x) nos permitirá fazer algumas aplicações.
A notação para f(x) próxima a l(x) é f(x) ≃ l(x). O erro da aproximação é E(x) = f(x) − l(x)e satisfaz à seguinte condição:
limx→x0
∣
∣
E(x)
x − x0
∣
∣ = limx→x0
∣
∣
f(x) − f(x0)
x − x0− f ′(x0)
∣
∣ = 0.
A sintaxe, para determinar a linearização de uma função, é a mesma que para achar a retatangente. De fato, a linearização de f(x) ao redor do pointo x0 é:
>f:=x->expressão:
>p:=diff(f(x),x):
>h:=unnaply(p,x):
>l:=x->f(x0 )+h(x0 )*(x-x0 );
Exemplo 4.10.
1. Se f(x) =1
(1 + 2x)4representa a temperatura num arame, calcule aproximadamente a
temperatura f(0.01).
Vamos determinar l(x) = f(0) + f ′(0)x:
>x0=0:
>f:=x->1/(1+2*x)ˆ4:
>p:=diff(f(x),x):
>h:=unapply(p,x):
>l:=x->f(x0)+h(x0)*(x-x0);

130 CAPÍTULO 4. DERIVADA
l := x 7→ 1 − 8x
>l(0.01);
0.92
Note que:
1
(1 + 2x)4≃ l(x) = 1 − 8x,
no intervalo (−ε, ε), tal que ε > 0 (pequeno). Como 0.01 ∈ (−ε, ε), temos:
f(0.01) ≃ l(0.01) = 0.92 graus
Figura 4.16: Aproximação linear de f do exemplo 1.
2. Se f(t) = e0.3x representa o crescimento de uma população de bactérias, calcule a populaçãode bactérias para x = 20.012.
Vamos determinar l(x) = f(20) + f ′(20) (x − 20); então:
>x0=20:
>f:=x->exp(3*x):
>p:=diff(f(x),x):
>h:=unapply(p,x):
>l:=x->f(x0)+h(x0)*(x-x0);
l := x 7→ 403.42 + 121.02 (x − 20)

4.7. APROXIMAÇÃO LINEAR 131
>l(20.012);
404.87
Figura 4.17: Aproximação linear de f do exemplo 2.
3. Calcule, aproximadamente (1.001)7 − 2 3√
(1.001)4 + 3.
Considere a função f(x) = x7 − 23√
x4 + 3 e x = 1.001. Então, para x0 = 1, temos:
>x0=1:
>f:=x->xˆ 7-2*root(xˆ4,3):
>p:=diff(f(x),x):
>h:=unapply(p,x):
>l:=x->f(x0)+h(x0)*(x-x0);
l := x 7→ 1
3(13x − 7)
>l(1.001);
2.00433

132 CAPÍTULO 4. DERIVADA
Figura 4.18: Aproximação linear de f do exemplo 3.
4.8 Aproximação de Ordem Superior
De forma análoga à aproximação linear podemos definir, em uma vizinhança do ponto x0,uma aproximação quadrática, aproximação cúbica, etc. É possível verificar que o erro destasaproximações é cada vez menor ao redor de um pequeno intervalo em torno de x0.
Definição 4.7. Seja f ∈ C4. A aproximação quadrática e a aproximação cúbica de f em torno de x0 sãodenotadas e definidas por:
q(x) = f(x0) + f ′(x0) (x − x0) +f ′′(x0)
2(x − x0)
2
c(x) = f(x0) + f ′(x0) (x − x0) +f ′′(x0)
2(x − x0)
2 +f (3)(x0)
3!(x − x0)
3.
se x ∈ (x0 − ε, x0 + ε), ε > 0 pequeno.
As aproximações linear, quadrática e a cúbica são casos especiais do chamado polinômio deTaylor.
4.9 Polinômio de Taylor
Seja f uma função n vezes derivável no ponto x0.
Definição 4.8. O polinômio de Taylor de ordem n, (n = 0, 1, 2, ....), no ponto x0 é denotado por Pn(x)e definido por:
Pn(x) =n
∑
k=0
f (k)(x0)
k!(x − x0)
k
= f(x0) + f ′(x0) (x − x0) +f ′′(x0)
2(x − x0)
2 + ......... +f (n)(x0)
n!(x − x0)
n

4.9. POLINÔMIO DE TAYLOR 133
onde f (0) = f .
O polinômio de Taylor é aplicado para aproximar uma função em uma vizinhança de umpontox0, conforme foi feito na definição 4.7 acima. A aproximação gera um resto, cuja expressãocontém derivadas da função de ordens superiores àquelas usadas para formar o polinômio deTaylor. Assim, para aproximar uma função por seu polinômio de Taylor de ordem n, em umavizinhança de x0, devemos, pelo menos, exigir que as derivadas da função, até ordem n, sejamcontínuas e que a derivada de ordem n + 1 exista, numa vizinhança de x0. Por isso, na sintaxe,abaixo, para achar o polinômio de Taylor de ordem n, inclui n + 1.
A sintaxe para determinar o polinômio de Taylor ao redor de x0, de ordem n, é:
>taylor(função,x=x0,n+1);
Exemplo 4.11.
1. Determine o polinômio de Taylor de ordem 10, no ponto x0 = 0, de f(x) = sen(x).
>taylor(sin(x),x=0,11);
x − 1
6x3 +
1
120x5 − 1
5040x7 +
1
362880x9 + O
(
x11)
A expressão O(x11) envole derivadas da func cão f de ordem maior ou igual a 11 e que repre-senta o erro cometido na aproximação polinomial fa função.
2. Determine o polinômio de Taylor de ordem 6, nos pontos x0 = 0 e x = −1, de f(x) = ex.
>taylor(exp(x),x=0,7);
1 + x +1
2x2 +
1
6x3 +
1
24x4 +
1
120x5 +
1
720x6 + O
(
x7)
>taylor(exp(x),x=-1,7);
e−1 + e−1 (x + 1) +1
2e−1 (x + 1)2 +
1
6e−1 (x + 1)3 + 1
1
24e−1 (x + 1)4 +
1
120e−1 (x + 1)5 +
+1
720e−1 (x + 1)6 + O
(
(x + 1)7)
A sintaxe para obter as aproximações é:
>s:=taylor(função,x=x0,n+1):
>p:=simplify(convert(s,polynom));
>aprox:=unapply(p,x);
No MAPLE 13, podemos utilizar a seguinte sintaxe:

134 CAPÍTULO 4. DERIVADA
>with(Student[Calculus1]):
>p:=TaylorApproximation(função, x = ponto, order = a ordem de aproximação);
>aprox:=unapply(p,x);
Exemplo 4.12.
1. Determine a aproximação de ordem 4 de f(x) =x
1 + x2, ao redor de x0 = 0.
>f:=x/(1+xˆ2):
>s:=taylor(f,x=0,5);
s := x − x3 + O(
x5)
p:=simplify(convert(s,polynom));
p := x − x3
>aprox:=unapply(p,x);
aprox := x 7→ x − x3
Figura 4.19: Gráfico de f(x) (azul) e da aproximação (vermelho).
2. A proporção de lâmpadas de sódio que falham após x horas de uso é dada por:
P (x) = 1 − 10000
(x + 100)2.
Determine a proporção de lâmpadas que falham após 99 horas de uso.
4.9. POLINÔMIO DE TAYLOR 135
Faremos diversas aproximações:
>with(Student[Calculus1]):
>f:=1-10000/(x+100)ˆ 2 :
>p1:=TaylorApproximation(f,x=100,order=1);
p1 :=1
2+
1
400x
>p2:=TaylorApproximation(f,x=100,order=2);
p2 :=5
16+
1
160x − 3
160000x2
>p3:=TaylorApproximation(f,x=100,order=3);
p3 :=3
16+
1
100x − 9
160000x2 +
1
8000000x3
>l:=unapply(p1,x);
l := x 7→ 1
2+
1
400x
>q:=unapply(p2,x);
q := x 7→ 5
16+
1
160x − 3
160000x2
>c:=unapply(p3,x);
c := x 7→ 3
16+
1
100x − 9
160000x2 +
1
8000000x3
Logo:
>evalf(l(99));
0.7475
>evalf(q(99));
0.74748125
>evalf(c(99));
0.747481250

136 CAPÍTULO 4. DERIVADA
Figura 4.20: Aproximação linear e quadrática, respectivamente.
Figura 4.21: Aproximação cúbica.
3. Calcule, aproximadamente (1.1)2 ×√
10 − 1.12, utilizando uma aproximação de ordem 5.
Considere a função f(x) = x2√
10 − x2 e x = 1.1. Então, para x0 = 1, temos:
>g:=xˆ 2 *sqrt(10-xˆ 2):
>p:=TaylorApproximation(g,x=1,order=5);
p := − 125
4374+
295
2187x +
2125
729x2 +
466
2187x3 − 1025
4374x4 − 1525
39366x5
>apro:=unapply(p,x);
apro := x 7→ − 125
4374+
295
2187x +
2125
729x2 +
466
2187x3 − 1025
4374x4 − 1525
39366x5
>apro(1.1);

4.10. ERROS DE APROXIMAÇÃO 137
3.587400047
Figura 4.22: Gráfico de f(x) (azul) e da aproximação (vermelho).
4.10 Erros de Aproximação
É possível provar que, se f ∈ Cn+1([a, b]) e x0 ∈ (a, b), então:
f(x) = Pn(x) + Rn(x), ∀x ∈ [a, b]
onde:
Rn(x) =(x − x0)
n+1
(n + 1)!f (n+1)(ν), ν ∈ (x1, x2)
onde x1 = min{x0, x} e x2 = max{x0, x}. Se |f (n+1)(x)| ≤ M para todo x ∈ [a, b], temos que:
E(x) ≤ |x − x0|n+1 M
(n + 1)!
E(x) = |f(x)−Pn(x)| é o erro da aproximação. A função Rn = Rn(x) é dita resto de Lagrange;no MAPLE é denotado, por O((x − x0))
n. Note que para n = 0 temos o Teorema do ValorMédio.
Exemplo 4.13.
1. Determine o erro cometido ao calcular ln(1.00013), utilizando aproximação de ordem 4.
>g:=ln(x):
>p:=TaylorApproximation(g,x=1,order=4);
p := 4x − 25
12− 3x2 +
4
3x3 − 1
4x4

138 CAPÍTULO 4. DERIVADA
>q:=diff(p,x$5);
q :=24
x5
Note que q ≤ 24 se x ≥ 1, logo:
>R4:=24*abs(x-1)ˆ5 /5!;
R4 :=1
5|x − 1|5
>simplify(subs(x = 1.00013, R4));
7.425860000 × 10−21
Figura 4.23: Gráficos de f(x) (varmelho) e apro(x) (azul).
2. Determine o erro cometido ao calcular√
e, utilizando aproximação de ordem 8.
>g:=exp(x):
>p:=TaylorApproximation(g,x=0,order=8);
p := 1 + x + 1/2x2 + 1/6x3 + 1/24x4 +1
120x5 +
1
720x6 +
1
5040x7 +
1
40320x8
>q:=diff(p,x$9);
q := ex
Note que, se 0 < x < 1, então ex < e < 3, logo:
>R8:=3*xˆ9 /9!;
R8 :=1
120960x9

4.10. ERROS DE APROXIMAÇÃO 139
>simplify(subs(x = 0.5, R8));
1.614686673 × 10−8
Figura 4.24: Gráficos de f(x) (varmelho) e apro(x) (azul).
3. Determine o erro cometido ao calcular cos(1.570791), utilizando aproximação de ordem 5.
>evalf(Pi/2);
1.570796327
>g:=cos(x):
>p:=TaylorApproximation(g,x=Pi/2,order=5);
p := −x +1
2π + 1/6x3 − 1/4x2π + 1/8xπ2 − 1/48π3 − 1
120x5 + 1/48x4π − 1
48x3π2+
+1
96x2π3 − 1
384xπ4 +
1
3840π5
>q:=diff(p,x$6);
q := −cos(x)
Note que, se |cos(x)| ≤ 1,
>R5:=abs(x-Pi/2)ˆ 6 /6!;
R5 :=1
720|x − 1
2π|6
>simplify(subs(x =1.570791, R5));
3.173684014 × 10−35

140 CAPÍTULO 4. DERIVADA
Figura 4.25: Gráficos de f(x) (varmelho) e apro(x) (azul).
4. Usando o polinômio de Taylor, em x0 = 0, aproxime 3√
e, com um erro inferior a 10−5.
Pelo visto no exemplo 2.
>Rn:=n->3ˆ(-n)/(n+1)!;
Rn := x 7→ 3−n
(n + 1)!
>convert(Rn( 1) < 10ˆ(-5), ’truefalse’);
false
>convert(Rn( 3) < 10ˆ(-5), ’truefalse’);
false
>convert(Rn( 5) < 10ˆ(-5), ’truefalse’);
true
>p:=TaylorApproximation(exp(x),x=0,order=5);
p := 1 + x +1
2x2 +
1
6x3 +
1
24x4 +
1
120x5
evalf(subs(x = 1/3, p))
1.395610425

4.10. ERROS DE APROXIMAÇÃO 141
Figura 4.26: Gráficos de f(x) (varmelho) e da aproximação (azul).

142 CAPÍTULO 4. DERIVADA
4.11 Exercícios
1. Determine a equação da reta tangente ao gráfico das seguintes funções, no ponto de abs-cissa dada:
(a) y = ln(x2), x = 1
(b) y = tg(x + 1), x = −1
(c) y = sen((x + 1)π), x = 0
(d) y = 3√
ex, x = 0
(e) y =x
x3 + 1, x = 1
(f) y =1√
x2 + 1, x = 1
(g) y =x5 − 1
x4 + 1, x = −1
(h) y =1
x2 (x4 + 1), x = 1
2. Determine as equações das retas tangentes à curva y = x2, nos pontos de abscissa x = ±3.
3. Determine o ponto onde a curva y = x3 tem tangente paralela à reta tangente à mesmacurva no ponto de abscissa x = 4. Determine a equação da reta tangente nesse ponto.
4. Determine as equações das retas tangentes e das retas normais às curvas, nos pontos deabscissas dadas:
(a) y = tg(−x2 + 1), x = 1
(b) y = e−1x , x = −1
(c) y = cos(x
2), x = 0
(d) y = arccos(2x), x = 0
(e) y =x5 + 1
x4 + 1, x = 1
(f) y = sen(ex), x = ln(π)
(g) y = ln(x2 + 1), x = 1
(h) y = (4x3 + 3x + 1) ln(x), x = 1
5. Sabendo que as curvas y = 4x2 e y = −x−1 tem retas tangentes paralelas com abscissacomum, determine-as.
6. Determine f ′(x) se:
(a) f(x) = (x2 + x + 1) (x3 + x) (x + 1)2
(b) f(x) = (x5 + x3 + 1)3
(c) f(x) =( x + 2
3x + 1
)
(x2 + 2)
(d) f(x) =(x3 + 1
x2 − 3
)
(x4 − 2x3 + 1)
7. Calcule as derivadas das funções:
(a) y = 5x−1
(b) y = (10x + 10−x)2
(c) y = log5(x2)
(d) y = x log4(x) − x
(e) y = ln(x
x + 1)
(f) y = ln(cosh(x))
(g) y = ln(10x)

4.11. EXERCÍCIOS 143
(h) y = ln(log10(x))
(i) y = sen(ex)
(j) y = ex sen(ln((x)))
(k) y =√
x3 + 2
(l) y =(x + 4
x + 7
)6
(m) y = xx−1
(n) y = 3ln(x)
(o) y =ex (x3 − 1)√
2x + 1
(p) y = (x2)x
(q) y = xx2
(r) y = x1x
(s) y =(
sen(x))x
(t) y = xex
(u) y =(
cos(x))sen(x)
(v) y =(
ln(x))ln(x)
(w) y =√
1 − tg2(x)
(x) y =√
2 − cos2(x)
(y) y =1
cos(2x)
(z) y = arcsen(x
3
)
8. Supondo que a equação dada define implicitamente y = f(x), calculedy
dx. :
(a) x3 + y3 = 5
(b) x3 + x2y + y2 = 0
(c)√
x +√
y = 10
(d) y3 =x − y
x + y
(e) 3 cos2(x + y) = 7
(f) tg(y) = x y
(g) ey = x + y
(h) ln(y2 + x) = y3 − x2
(i) (x + y)2 = (x − y)2
(j) (x2 − y2)2 = y2 + x2
(k) sen(x y) = x cos(y)
(l) ln(y − x) = ln(y + x)
(m) e−2x−y = 5 + ln(x)
(n) ln(y x) = exy
(o) ln(y
x
)
= exy
(p) cos(y x2) = sen(y x2)
(q) x y2 + 3 tg(y) = x y
(r) x arctg(y) + y arctg(x) = 1
9. Supondo que a equação dada define implicitamente x = g(y), calculedx
dy. :
(a) x3 + y3 = 5
(b) x3 + x2y + y2 = 0
(c)√
x +√
y = 10
(d) y3 =x − y
x + y
(e) 3 cos2(x + y) = 7
(f) tg(y) = x y
(g) ey = x + y
(h) ln(y2 + x) = y3 − x2
(i) (x + y)2 = (x − y)2
(j) (x2 − y2)2 = y2 + x2
(k) sen(x y) = x cos(y)
(l) ln(y − x) = ln(y + x)
(m) e−2x−y = 5 + ln(x)
(n) ln(y x) = exy
(o) ln(y
x
)
= exy
(p) cos(y x2) = sen(y x2)
(q) x y2 + 3 tg(y) = x y
(r) x arctg(y) + y arctg(x) = 1

144 CAPÍTULO 4. DERIVADA
10. Determine os pontos da curva x2 + 2x y + 3 y2 = 3 nos quais as retas tangentes nessespontos sejam perpendiculares à reta x + y = 1.
11. Determine a segunda e terceira derivada de:
(a) y = 6√
x
(b) y = x−5
(c) y = sen(x2)
(d) y = tg2(x)
(e) y = sen2(x) + cos(x)
(f) y =x
2 (x + 1)
(g) y =(
1 +1
x
)2
(h) y =x√
x2 − 1
(i) y =ex
x
(j) y = cos(sen(x))
(k) y = ln(ln(x))
(l) y = arctg(sen(x))
(m) y = sec(√
x)
(n) y = arcsec(x2)
(o) y = arccotgh(x3 + 1)
12. Calcule as derivadas sucessivas, até a ordem n dada:
(a) y = 3x4 − 2x, n = 5
(b) y =√
3 − x2, n = 10
(c) y =1
x − 1, n = 14
(d) y = e2x+1, n = 12
(e) y = ln(2x), n = 14
(f) y = −2 cos(x
2
)
, n = 15
(g) y = sen(ax), n
(h) y = ln(1
x
)
, n = 10
(i) y = x ex, n
(j) y = x cosech(ln(x)), n = 10
(k) y = x arctgh(x) − ln(√
1 − x2), n = 4
(l) y = cosh9(x), n = 6
(m) y = arcsenh(ex), n = 4
(n) y = ln(sech(x)), n = 5
(o) y = senh(cosh(x)), n = 38
(p) y = x(
sen(ln(x)) − cos(ln(x)))
,n = 10
(q) y = ln(1 + sen(x)
1 − sen(x)
)
, n = 5
13. Seja y = a ex + b e−x + c x + x5, verifique que:
x3 y(3) + 5x2 y′′ + (2x − x3) y′ − (2 + x2) y = 40x3 − 4x5.
14. Calcule y′′(x) se:
(a) x4 + y4 = 16
(b) x2 + 6x y + y2 = 8
(c) x2 y2 = (y + 1)2(y − y2)
(d) y2 = x3 (2 − x)
(e) sen(y) + sen(x) + sen(x y) = x
(f) cos(y) − sen(x) = x
15. Determine a aproximação, linear, quadrática e cúbica, no ponto x0 = 0, das seguintesfunções:

4.11. EXERCÍCIOS 145
(a)x
x2 + 1(b) x2 cos(x)
(c) arctg(x2 + 1)
(d)√
x + 3
(e) e−2x
(f) 3√
x + 1
(g)x
x2 + 1
(h) ln(x3 + 5x + 5)
(i) (4x3 + 3x − 1)7
16. Esboce, no mesmo referencial, as aproximações obtidas no ítem anterior.
17. Calcule, utilizando aproximação de ordem 10, o valor de:
(a) 3√
0.12668
(b) 10√
102340.462380
(c) sen(610)
(d) (1.0022546)7 + sen(1.0024589 × π)
(e) 3√
(8.014567)4 − 13√
8.0194623
(f) 22.0025783
18. Use o polinômio de Taylor de ordem 3 da função f(x) = sen(x) em x0 =π
6para achar o
valor aproximado de sen(31o). Avalie o erro e esboce a função e a aproximação nomesmoreferencial.
19. Use o polinômio de Taylor de ordem 5 da função f(x) = sen(x) em x0 = 0 para achar ovalor aproximado de sen(2o). Avalie o erro e esboce a função e a aproximação no mesmoreferencial.
20. Use o polinômio de Taylor de ordem 4 da função f(x) = cos(x) em x0 = 0 para achar ovalor aproximado de cos(2o). Avalie o erro e esboce a função e a aproximação no mesmoreferencial.
21. Use o polinômio de Taylor de ordem 5 da função f(x) = ln(x + 1) em x0 = 0 para acharo valor aproximado de ln(1.56783). Avalie o erro e esboce a função e a aproximação nomesmo referencial.
22. Usando o polinômio de Taylor, em x0 = 0, determine uma aproximação de sen( π
11
)
, com
erro inferior a 3 × 10−4.
23. Usando o polinômio de Taylor, em x0 =π
4, determine uma aproximação de cos(46o), com
erro inferior a 10−5.
24. Calcule o valor aproximado do volume de um cubo, se o comprimento de cada arestavaria de 10 cm para 10.1 cm.

146 CAPÍTULO 4. DERIVADA
25. Mostre que a função logística:
L = L(t) =A
1 + C Ae−rt
satisfaz à equação
dL
dt= C L
(
1 − L
A
)
Se L = L(t) representa o crescimento populacional, quando a população se estabiliza?
26. A redução de oxigênio na água de uma lagoa, devido ao despejo de esgoto, só volta aníveis normais t dias após o despejo do esgoto. Sabendo que a quantidade de oxigênioque permanece, após t dias é dada por:
P (t) = 500t2 + 10 t + 100
t3 + 20 t2 + 200,
medido em% do nível normal de oxigênio, determine a velocidade com que a quantidadede oxigênio está sendo reduzida, após 1, 10, 20 e 50 dias após o despejo.
27. A frequência da vibração da corda de um violino é dada por
f =1
2L
√
T
ρ,
onde L é o comprimento da corda, T é a tensão sobre a corda e ρ é densidade linear demassa da corda. Determine a taxa de varição de f em relação a L (com T e ρ constantes);a taxa de varição de f em relação a T (com L e ρ constantes); a taxa de varição de f emrelação a ρ (com L e T constantes) e interprete os resultados.

Capítulo 5
VARIAÇÃO DE FUNÇÕES
Neste capítulo, aplicaremos tudo o que foi aprendido sobre oMAPLE, nos capítulos anteriores.
5.1 Introdução
Seja f uma função e x0 ∈ Dom(f).
f possui um ponto demáximo relativo ou demáximo local no ponto x0, se existe um intervaloaberto I que contem x0 tal que:
f(x0) ≥ f(x), para todo x ∈ I ∩ Dom(f)
A imagem de x0, f(x0), é chamada valor máximo local de f .
f possui um ponto demínimo relativo ou demínimo local no ponto x0, se existe um intervaloaberto I que contem x0 tal que:
f(x) ≥ f(x0), para todo x ∈ I ∩ Dom(f)
A imagem de x0, f(x0), é chamada valor mínimo local de f .
Em geral, um ponto de máximo ou de mínimo é chamado ponto extremo.
Proposição 5.1. Se f é uma função derivável no intervalo (a, b) e x0 ∈ (a, b) é um extremo relativo def , então f ′(x0) = 0.
A proposição nos indica que num ponto de máximo ou de mínimo relativo de uma função f ,a reta tangente ao gráfico de f nesse ponto é paralela ao eixo dos x. A proposição nos dá umacondição necessária para que um ponto x0 ∈ (a, b) seja extremo.
Definição 5.1. Seja f uma função contínua em (a, b) e x0 ∈ (a, b). O ponto x0 é chamado pontocrítico de f , se uma das condições abaixo ocorre:
1. f ′(x0) não existe.
147

148 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
2. f é derivavável em x0 e f ′(x0) = 0.
Pela proposição anterior, todo ponto extremo é ponto crítico. A recíproca é falsa. Um ponto"candidato"a máximo ou mínimo relativo de uma função derivável f sempre deve satisfazer àequação:
f ′(x) = 0
Mais adiante saberemos descartar dos pontos críticos, aqueles que não são extremais.
O ponto onde uma função atinge o maior valor (se existe) é chamado máximo absoluto dafunção. Um ponto x0 ∈ Dom(f) é de máximo absoluto de f quando para todo x ∈ Dom(f),tem-se
f(x0) ≥ f(x).
O ponto onde uma função atinge o menor valor (se existe) é chamado mínimo absoluto dafunção. Um ponto x0 ∈ Dom(f) é de mínimo absoluto de f quando para todo x ∈ Dom(f),tem-se
f(x0) ≤ f(x).
Observamos que uma função pode não ter pontos onde f atinge o seu valor máximo e/oumínimo absolutos.
Um ponto de máximo absoluto é um ponto de máximo local. A recíproca é falsa; analogamentepara mínimo absoluto.
Seja y = f(x) uma função definida num domínio D.
f é crescente em D se para todo x0, x1 ∈ D com x0 < x1, tem-se f(x0) < f(x1).
f é decrescente em D, se para todo x0, x1 ∈ D com x0 < x1, tem-se f(x0) > f(x1).
Em ambos os casos, f é dita monótona.
Proposição 5.2. Seja f uma função contínua em [a, b] e derivável em (a, b).
1. Se f ′(x) > 0 para todo x ∈ (a, b), então f é crescente em [a, b].
2. Se f ′(x) < 0 para todo x ∈ (a, b), então f é decrescente em [a, b].
5.2 Determinação de Máximos e Mínimos
Teorema 5.1. Seja f uma função contínua em [a, b] e derivável em (a, b), exceto possivelmente numponto x0 ∈ (a, b).
1. Se f ′(x) > 0 para todo x < x0 e f ′(x) < 0 para todo x > x0, então x0 é ponto de máximo localde f .

5.2. DETERMINAÇÃODE MÁXIMOS E MÍNIMOS 149
2. Se f ′(x) < 0 para todo x < x0 e f ′(x) > 0 para todo x > x0, então x0 é ponto de mínimo local def .
Do teorema 5.1 segue que num ponto de máximo ou de mínimo de uma função contínua nemsempre existe derivada.
Teorema 5.2. Seja f uma função duas vezes derivável e x0 um ponto crítico de f . Se:
1. f ′′(x0) > 0, então x0 é um ponto de mínimo relativo de f .
2. f ′′(x0) < 0, então x0 é um ponto de máximo relativo de f .
Dos teoremas 5.1 e 5.2 temos que os candidatos a pontos de máximos e mínimos relativos sãonão só pontos críticos, mas também, podem ser os pontos do domínio onde a função não éderivável.
No caso em que o domínio de f é um intervalo do tipo [a, b], após determinarmos os pontos demáximo e de mínimo no intervalo (a, b), devemos calcular os valores da função nos extremosdo intervalo e comparar estes valores com os valores máximos e mínimos relativos obtidosanteriormente nos pontos críticos; o maior valor corresponderá ao máximo absoluto e o menorvalor ao mínimo absoluto da função e os pontos correspondentes serão, respectivamente, ospontos de máximo e de mínimo absolutos.
No caso em que f ′′(x0) = 0, o teorema 5.2 não afirma nada; quando acontecer isto, recomen-damos usar o teorema 5.1.
Em muitos casos é conveniente, para ver se existem possíveis pontos extremos de uma função,fazer:
>plot(f(x),x=-infinity..infinity);
Exemplo 5.1.
1. Calcule caso existam, os pontos extremos absolutos de f(x) = ax2 + b x + c; a, b, c ∈ R ea 6= 0.
Como f é diferenciável em todo ponto, calculemos os pontos críticos de f :
>f:=aˆ2 +b*x+c:
>solve(diff(f,x)=0,{x});
{x = −1
2
b
a}
>d2:=unapply(diff(f,x$2),x);
d2 := x 7→ 2 a

150 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
Logo, o vértice x = − b
2aé um ponto de máximo absoluto de f se a < 0 e um ponto de mínimo
absoluto se a > 0.
2. Calcule caso existam, os pontos extremos absolutos de:
f(x) =
{
x3 − x2 − 8x + 1 se − 2 ≤ x
5 ex+2 outro caso
>f:x->piecewise(-2 <= x, xˆ3-xˆ2-8*x+1, 5*exp(x+2)):
>plot(f(x), x = -3 .. 2,thickness=3,color=blue);
Figura 5.1: Gráfico de f .
Note que f não pussui derivada em x = −2.
>d1:=diff(f(x),x);
p :=
5 ex+2 x < −2
undefined x = −2
3x2 − 2x − 8 −2 < x
Verifique, efetivamente, que f não pussui derivada em x = −2.
>solve(p>0,x);
RealRange(−∞, Open(−2)), RealRange(Open(−2), Open(−4/3)), RealRange(Open(2),∞)
>solve(p<0,x);
RealRange(Open(−4/3), Open(2))
Logo, x = −4
3é um ponto de máximo relativo e x = 2 é um ponto de mínimo relativo.

5.2. DETERMINAÇÃODE MÁXIMOS E MÍNIMOS 151
Figura 5.2: Exemplo 2.
3. Calcule os pontos extremos relativos de f(x) =x6
4− x4
2+ 2 se x ∈ [−2, 2].
f é diferenciável em todo ponto.
>f:=x->xˆ6 /4 -xˆ4 /2 +2:
Figura 5.3: Gráfico do exemplo 3.
>solve(diff(f(x),x)=0,{x});
{x = 0}, {x =2
3
√3}, {x = −2
3
√3}
>d2:=unapply(diff(f(x),x$2),x);
d2 := x 7→ 15
2x4 − 6x2
>d2(2*sqrt(3)/3),d2(-2*sqrt(3)/3),d2(0);;

152 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
16
3,
16
3, 0
Como f ′′(0) = 0 utilizamos o teorema 5.1:
>solve(diff(f(x),x)>0,x);
RealRange(Open(−2/3√
(3)), Open(0)), RealRange(Open((2/3)√
(3)),∞)
>solve(diff(f(x),x)<0,x);
RealRange(−∞, Open(−(2/3)√
(3))), RealRange(Open(0), Open((2/3)√
(3)))
f ′(x) > 0 se −2
3
√3 < x < 0 e f ′(x) < 0 se 0 < x <
2
3
√3; logo, x = 0 é ponto de máximo
relativo de f .
>f(2),f(-2),f(0),f(2*sqrt(3)/3),f(-2*sqrt(3)/3);
10, 10, 2,46
27
Logo,−2 e 2 são pontos de máximo absolutos, −2
3
√3 e
2
3
√3 são pontos de mínimo absolutos.
No MAPLE 13 há a seguinte sintaxe para calcular diretamente os pontos de máximos e demínimos relativos:
>maximize(expressão, variável, location);
>minimize(expressão, variável, location);
No exemplo:
>p:=xˆ6 /4 -xˆ4 /2 +2:
>minimize(p,x=-2..2,location);
46
27
{[{
x = −2
3
√3
}
,46
27
]
,
[{
x =2
3
√3
}
,46
27
]}
>maximize(p,x=-2..2,location);
10 {[{x = −2}, 10], [{x = 2}, 10]}

5.3. CONCAVIDADE E PONTOS DE INFLEXÃODE FUNÇÕES 153
5.3 Concavidade e Pontos de Inflexão de Funções
Seja y = f(x) uma função derivável em D, onde D é um intervalo aberto ou uma reunião deintervalos abertos.
f é dita côncava para cima em D se f ′(x) é crescente em D.
f é dita côncava para baixo em D se f ′(x) é decrescente em D.
Intuitivamente, quando um ponto se desloca ao longo do gráfico de uma função f , da esquerdapara a direita e a reta tangente nesse ponto vai girando no sentido anti-horário, isto significaque o coeficiente angular dessa reta tangente cresce à medida que x aumenta. Neste caso afunção tem a concavidade voltada para cima.
Analogamente, quando um ponto se desloca ao longo do gráfico de uma função f , da esquerdapara a direita e a reta tangente nesse ponto vai girando no sentido horário, isto significa que ocoeficiente angular dessa reta tangente decresce à medida que x aumenta. Neste caso a funçãotem a concavidade voltada para baixo.
Não confundir concavidade com crescimento ou decrescimento de uma função. No desenho aseguir, o gráfico de uma função crescente e côncava para cima e o de uma função decrescente ecôncava para cima, respectivamente.
Figura 5.4:
Proposição 5.3. Seja y = f(x) uma função duas vezes derivável em D.
1. Se f ′′(x) > 0 para todo x ∈ D, então f é côncava para cima em D.
2. Se f ′′(x) < 0 para todo x ∈ D, então f é côncava para baixo em D.
Um ponto (x0, f(x0)) do gráfico de uma função f é um ponto de inflexão de f , se existe umpequeno intervalo (a, b) ⊂ D tal que x0 ∈ (a, b) e:
1. f é côncava para cima em (a, x0) e côncava para baixo em (x0, b), ou
2. f é côncava para baixo em (a, x0) e côncava para cima em (x0, b).
Se a função é duas vezes derivável, para obter os pontos x0, candidatos a pontos de inflexão,resolvemos a equação:
f ′′(x) = 0

154 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
e estudamos o sinal de f ′′(x) para x > x0 e x < x0, onde x0 é solução da equação. O fato def ′′(x0) = 0 não implica em que x0 seja abscissa de um ponto de inflexão.
Notemos que, se f ′′(x0) = 0 e f (3)(x0) 6= 0, então, x0 é um ponto de inflexão.
Num ponto de inflexão, não necessariamente existe a segunda derivada da função.
Exemplo 5.2.
1. Seja f(x) = x4:
>diff(f(x),x$2);
12x2
Logo, f ′′(x) = 0 se x = 0 e x = 0 é um ponto de mínimo absoluto de f (verifique!).
Figura 5.5: Gráfico de f(x) = x4.
2. Seja f(x) = x |x|:
>f:=x*abs(x):
>f1:=convert(f,piecewise);
f1 :=
{
−x2 x < 0
x2 0 ≤ x
>diff(f1,x);
{
−2x x ≤ 0
2x 0 < x
>diff(x*abs(x),x$2);

5.3. CONCAVIDADE E PONTOS DE INFLEXÃODE FUNÇÕES 155
−2 x < 0
undefined x = 0
2 0 < x
Então, a origen é um ponto de inflexão e f ′′(0) não existe.
Figura 5.6: Gráfico de f(x) = x |x|.
3. Determine os pontos extremos, estude a concavidade e ache as assíntotas de
f(x) =3√
x2 (1 − x2).
>f1:=x->root(xˆ2,3)*(1-xˆ2):
Pontos críticos de f :
>d1:=diff(f(x),x);
d1 := −2
3
x(
−1 + 4x2)
(x2)2/3
Se x 6= 0, a função f(x) =3√
x2 (1 − x2) é contínua para todo x ∈ R; mas, não existe f ′(0).Logo, no ponto (0, 0) do gráfico deve existir uma "cúspide"como no gráfico do valor absoluto.Se x 6= 0, os pontos críticos de f são:
>p:=solve(d1=0,x);
p := −1
2,
1
2
Máximos e mínimos relativos de f :
Se x 6= 0; então:
>d2:=unapply(simplify(diff(d1,x)));

156 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
d2 := x 7→ −2
9
20x2 + 1
(x2)23
.
>evalf(d2(p[1])),evalf(d2(p[2]));
−3.359789466, −3.359789466
logo, x = −1
2e x =
1
2são pontos de máximos relativos de f .
Se x = 0, estudamos o sinal da derivada de f para valores à esquerda e à direita de x = 0:
>assume(x>0):
>solve(d1>0,x);
RealRange(Open(0), Open(1/2))
>solve(d1<0,x);
RealRange(Open(1/2),∞)
Logo, x = 0 é um ponto de mínimo local de f .
Concavidade de f : Como f ′′(x) < 0 para todo x ∈ R−{0}, f é côncava para baixo em R−{0}.Logo, não tem pontos de inflexão.
Assíntotas:
>Limit(f1(x),x=-infinity)=limit(f1(x),x=-infinity);
limx→−∞
3√
x2 (x2 − 1) = ∞
>Limit(f1(x),x=infinity)=limit(f1(x),x=infinity);
limx→∞
3√
x2 (x2 − 1) = ∞
Logo, f não possui assíntotas horizontais e nem verticais.

5.3. CONCAVIDADE E PONTOS DE INFLEXÃODE FUNÇÕES 157
Figura 5.7: Gráfico de f(x) = x2/3 (1 − x2).
4. Determine os pontos extremos, estude a concavidade e ache as assíntotas da família decurvas:
f(x =1
x2 + 2x + c, c ∈ R
>f2:=1/(xˆ2 +2*x+c):
>solve(f2=0,x);
−1 +√
1 − c, −1 −√
1 − c
se c > 1, Dom(f) = R, se c = 1, Dom(f) = R − {−1} e se c < 1, Dom(f) = R − {−1 ±√
1 − c}.
Pontos críticos de f :
>solve(diff(f, x) = 0, x);
−1
f ′(x) = 0 se x = −1, (c 6= 1). Neste caso, o ponto crítico é (−1,1
c − 1).
Máximos e mínimos de f :
>d2:=unapply(simplify(diff(f, x$2),x);
d1 := x 7→ −2 (3x2 + 6x + 4 − c)
(x2 + 2x + c)3
>d2(-1);
− 2
(c − 1)2
Logo, x = −1 é ponto de máximo relativo se c 6= 1.

158 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
Resolvendo f ′′(x) = 0:
>solve(d2(x)=0,x);
−3 +√
3 (c − 1)
3,−3 −
√
3 (c − 1)
3
Se c > 1, temos dois pontos de inflexão.
Assíntotas:
Assíntotas horizontais:
>Limit(f2(x),x=-infinity)=limit(f2(x),x=-infinity);
limx→−∞
1
x2 + 2x + c= 0
>Limit(f2(x),x=infinity)=limit(f2(x),x=infinity);
limx→∞
1
x2 + 2x + c= 0
Então, y = 0 é assíntota horizontal.
Assíntotas verticais:
Se c = 1,
>Limit(f2(x),x=-1)=limit(f2(x),x=-1);
limx→−1
1
x2 + 2x + 1= ∞
se c < 1,
>Limit(f2(x),x=-1-sqrt1-c)=limit(f2(x),x=-1-sqrt1-c);
limx→−1−
√1−c
1
x2 + 2x + c= ∞
>Limit(f2(x),x=-1+sqrt1-c)=limit(f2(x),x=-1+sqrt1-c);
limx→−1+
√1−c
1
x2 + 2x + c= ∞
x = −1 e x = −1±√
1 − c são assíntotas verticais da curva, para c = 1 e c < 1, respectivamente.

5.3. CONCAVIDADE E PONTOS DE INFLEXÃODE FUNÇÕES 159
Figura 5.8: Esboço dos gráficos para c = −2 e c = 1, respectivamente.
Figura 5.9: Esboço para c = 2.
5. Determine os pontos extremos, estude a concavidade e ache as assíntotas da família decurvas
f(x) =c x
1 + c2 x2c ∈ R.
f3:=c*x/(1+cˆ2 *xˆ2):
Pontos críticos de f :
>p:=solve(diff(f3, x) = 0, x);
p :=1
c, −1
c
se c 6= 0.
Máximos e Mínimos de f :
>d2:=unapply(simplify(diff(f, x$2),x);

160 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
d2 := x 7→ 2c3x
(
−3 + c2x2)
(1 + c2x2)3
>d2(p[1]),d2(p[2]);
−1
2c2,
1
2c2
Logo, x =1
cé ponto de máximo relativo de f e x = −1
cé ponto de mínimo relativo de f .
(c 6= 0).
>solve(diff(f, x$2) = 0, x);
0,
√3
c, −
√3
c
pontos de inflexão.
Assíntotas:
>Limit(f3(x),x=-infinity)=limit(f3(x),x=-infinity);
limx→−∞
c x
1 + c2 x2= 0
y = 0 é assíntota horizontal da curva.
Figura 5.10: Esboço dos gráficos para c = ±12 e c = ±1

5.4. PROBLEMAS DE OTIMIZAÇÃO 161
5.4 Problemas de Otimização
O seguente teorema, devido a Weierstrass, garante a existência de pontos extremos absolutosde uma função, sem a hipótese de que a função seja derivável. A prova deste teorema seráomitida. Para mais detalhes veja a bibliografia avançada.
Teorema 5.3. (Weierstrass)
Seja f : [a, b] −→ R contínua. Então existem x1 e x2 em [a, b] tais que:
f(x1) ≤ f(x) ≤ f(x2), para todo x ∈ [a, b].
No teorema as hipóteses de que o domínio seja um intervalo do tipo [a, b] e de que a funçãoseja contínua são condições essenciais.
De fato, a função contínua f(x) = x não possui pontos demáximo nemdemínimo em qualquer
intervalo aberto. A função descontínua f(x) =1
xse x 6= 0 e f(0) = 0, não possui ponto de
máximo nem de mínimo no intervalo [−1, 1].
Nesta seção apresentaremos problemas de maximização e minimização aplicados a diversasáreas. O primeiro passo para resolver este tipo de problema é determinar, de forma precisa, afunção a ser otimizada,em geral, é uma expressão que depende de mais de uma variável. Masusando as condições adicionais dadas no problema, a sua expressão pode ser reescrita comouma função de uma variável derivável e assim poderemos aplicar os teoremas.
O segundo passo é verificar como é o domínio da função a ser otimizada. Caso o domínio dafunção seja um intervalo fechado, o teorema de Teorema de Weierstrass, garante que a funçãoatinge um valor de máximo absoluto e um valor de mínimo absoluto.
Assim, dependendo do tipo do domínio da função a ser otimizada, temos dois procedimentosbásicos para determinar os valores de máximo e/ou mínimo absoluto de f :
1. Se o domínio da função for um intervalo fechado [a, b]: Primeiramente, determinamos ospontos críticos da função. A seguir, avaliamos a função nos pontos críticos encontrados enos extremos do intervalo [a, b].
2. Se o domínio da função for um intervalo aberto ou a reta : Não há garantia que a funçãoatingirá um valor de extremo absoluto, quer seja máximo absoluto, quer seja mínimo ab-soluto.. Nesse caso, determinamos os pontos críticos da função e analisando a naturezade cada um, verificando se há pontos de extremos relativos. A seguir, precisamos justifi-car se a função atinge, de fato, o seu valor de máximo e/ou mínimo absoluto em algumdos pontos de extremo relativo.
Caso o domínio da função seja um intervalo que não seja nem aberto e nem fechado, combi-namos os procedimentos 1 e 2 acima. Por exemplo, se o domínio da função for o intervalo[a, b), não podemos nos esquecer de avaliar a função no extremo e comparar esse valor, com osvalores da função nos pontos de extremos relativos.

162 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
Exemplo 5.3.
1. Determine os pontos da curva xy = 1 mais próximos da origem.
Seja (x, y) um ponto da curva e considere: d((0, 0), (x, y)) =√
x2 + y2. Minimizar d é equiva-lente a minimizar d2((0, 0), (x, y)) = x2 + y2.
>d:=xˆ2+yˆ2:
como (x, y) pertence à curva, temos que y = x−1:
>d1:=subs(y=1/x,d);
d1 := x2 +1
x2
>solve(diff(d1,x)=0,x);
−1, 1, I, −I
obtem-se os pontos críticos x = ±1.
>diff(d1,x$2);
2 +6
x4
que é sempre positiva; logo, x = ±1 são pontos demínimo; os pontosmais próximos da origemsão (1, 1) e (−1,−1).
-1 1
-1
1
Figura 5.11: Exemplo [2].
2. Determine as dimensões do retângulo de maior área que pode ser inscrito na elipse
x2
a2+
y2
b2= 1; a, b > 0.

5.4. PROBLEMAS DE OTIMIZAÇÃO 163
x
y
Figura 5.12: Exemplo [3].
Pela simetria da figura, estudaremos o problema no primeiro quadrante e multiplicaremos oresultado por quatro. A área do retângulo é 4x y, mas otimizaremos a função A = 16x2 y2:
>el:=xˆ2/aˆ2 +yˆ2/bˆ2 =1:
>A1:=16*xˆ2 *yˆ2:
>s1:=solve(el,yˆ2);
s1 :=b2 (−x2 + a2)
a2
A:=subs(yˆ2=s1,A1);
A := 16b2 x2 (−x2 + a2)
a2
Se x > 0.
>solve(diff(A,x)=0,x);
0,1
2
√2 a, −1
2
√2 a
Logo, x =1
2
√2 a.
AA:=simplify(diff(A,x$2));
AA := 32b2 (−6x2 + A2)
A2
>subs(x=sqrt(2)*a/2,AA);
−64 b2
Logo,1
2
√2 a é ponto de máximo de A e:
>subs(x=sqrt(2)*a/2,sqrt(s1));

164 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
1
2
√2 b
Logo, a área do maior retângulo que pode ser inscrito na elipse é:
>subs(x=sqrt(2)*a/2,y==sqrt(2)*b/2,A1);
2 a b
As dimensões do retângulo são 2x =√
2 a e 2 y =√
2 b.

5.5. EXERCÍCIOS 165
5.5 Exercícios
1. Calcule os pontos críticos (se existem) de:
(a) y = x3 + 2x2 + 5x + 3
(b) y = x4 + 4x3
(c) y = sen(x) − cos(x)
(d) y = ex − x
(e) y = 3√
(x2 − 9)2
(f) y =x
x2 − 4
(g) y = |2x − 3|(h) y = (4x2 − 3x − 1)7
(i) y = xm (a − x)n, n, m ∈ Z e a > 0
2. Usando a primeira derivada, determine os intervalos de crescimento e/ou decrescimentodas seguintes funções:
(a) f(x) = 6x4 − 20x3 − 6x2 + 72x + 12
(b) f(x) = 4x3 − 3x
(c) f(x) = ex − x
(d) f(x) = ln(x2 + 1)
(e) f(x) = x2 ln(x)
(f) f(x) =1√
x2 + 1
(g) y = 3x2 + 6x + 7
(h) y = x3 + 2x2 − 4x + 2
(i) y = (x − 1)(x − 2)(x + 3)
(j) y = sen(x) +x
2
(k) y = 2x
(l) y = x e−x − x2
(m) y =x2
x − 1
3. Calcule os pontos de máximos e de mínimos relativos (se existem) de:
(a) y =x3
3+ 3x2 − 7x + 9
(b) y =x4
4+
5
3x3 + 4x2
(c) y =3√
6x2 − 2x
(d) y = 5 + 5√
(x − 2)7
(e) y = 3 + 3√
(2x + 3)4
(f) y =4x
x2 + 4
(g) y =x + 1
x2 + 2x + 1− 2x
(h) y = (x + 2)2(x − 1)3
(i) y = x2√
16 − x
(j) y = x4 +4x3
3+ 3x2
(k) y = x − 3 +2
x + 1
(l) y = x2√
3 − x2
(m) y = x2√
5 + x
(n) y = 3√
x (x + 2)−23
(o) y = (x + 2) (x − 2)3
(p) y = 2x2 +2
x2
4. Calcule os pontos de inflexão (se existem) e estude a concavidade de:

166 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
(a) y = −x3 + 5x2 − 6x
(b) y = 3x4 − 10x3 − 12x2 + 10x + 9
(c) y =1
x + 4
(d) y = x2 − 1
3x2
(e) y =x2 + 9
(x − 3)2
(f) y = e−x2
(g) y = (x + 4) ex+4
(h) y =x + 1
x
(i) y = x√
1 − x2
(j) y = sen(π x)
(k) y = ln(x2 − 2x + 2)
(l) y = cos(π x)
5. Esboce os gráficos de:
(a) y = −x4 − x3 − 2x2
(b) y =3x + 1
(x + 2)(x − 3)
(c) y = ln(x2 + 1)
(d) y =4√
x + 2
(e) y =x2
x − 3
(f) y = 2√
x − x
(g) y = x3 − 3x2
(h) y = x +1
x
(i) y =1
x2− 1
x(j) y = x5 − x3
(k) y = x6 − x4.
(l) y =x + 1
x2 + 2x
(m) y = (x + 1) (x − 3)23
(n) y =1√
x3 + 1
(o) y =x2 + 2
x2 − x − 2
(p) y =(x + 1)2
(x − 1) (x + 2)2
(q) y =x2 − 4x − 5
x − 5
(r) y = (x2 − 1)2
(s) y = 2x ln2(x)
(t) y =x (x − 1)
x2 − 4
(u) y =x2
ex2
(v) y = (x4 − x2) ln(x)
(w) y =3√
x2 − 3√
x4
(x) y = 3√
(x − 1)2
6. Determine o valor de k tal que a função y = x3 +kx2 +x+1 admita um ponto de inflexãoem x = 1.
7. Seja y = ax3 + bx2 + cx + d; a, b, c, d ∈ R e a 6= 0.
(a) Verifique que y tem um único ponto de inflexão de y.
(b) Verifique que y tem um ponto de máximo e um ponto de mínimo se b2 − 3ac > 0.

5.5. EXERCÍCIOS 167
8. Seja y = xm (1 − xn), onde m, n são números naturais. Verifique:
(a) Se m é par, y tem um ponto de mínimo em x = 0.
(b) Se n é par, y tem um ponto de mínimo em x = 1.
9. Esboce o gráfico da família de curvas y = x4 + x3 + c x2, c ∈ R.
Problemas de Otimização
1. Determine a área do retângulo máximo, com base no eixo dos x e vértices superioressobre a parábola y = 12 − x2.
2. Com uma quantidade A de material dada deve-se construir um depósito de base qua-drada e paredes verticais. Determine as dimensões que dão o volume máximo.
3. Uma reta passando por (1, 2) corta o eixo dos x em A = (a, 0) e o eixo dos y em B = (0, b).Determine o triângulo AOB de área mínima para a e b positivos.
4. Um cartaz deve conter 50 cm2 de matéria impressa com duas margens de 4 cm cada, naparte superior e na parte inferior e duas margens laterais de 2 cm cada. Determine asdimensões externas do cartaz de modo que sua área total seja mínima.
5. Faz-se girar um triângulo retângulo de hipotenusa h em torno de um de seus catetos,gerando um cone circular reto. Determine o cone de volume máximo.
6. Determine o ponto da curva y2 = 2(1 − x) situado á menor distância da origem.
7. Determine o volume do maior cilindro circular reto que pode ser inscrito numa esfera deraio r.
8. Deseja-se construir uma piscina de forma circular, com volume igual a 125πm3. Deter-mine os valores do raio r e da profundidade h (altura), de modo que a piscina possa serconstruida com a menor quantidade de material possível.
9. Determine a altura do maior cone que pode ser gerado pela rotação de um triânguloretângulo de hipotenusa igual a 2 cm em torno de um dos catetos.
10. Determine o ponto do eixo dos x cuja soma das distâncias a (4,−5) e (−2, 3) é mínima.
11. Entre todos os retângulos de área dada a, qual o que tem menor perímetro?
12. Determine os catetos de um triângulo retângulo de área máxima sabendo que sua hipo-tenusa é h.

168 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES
13. Uma janela tem formato retangular com um semi-círculo no topo. Determine as dimen-sões da janela de área máxima, se o perímetro é de 12 metros.
14. Determine a área do maior retângulo com lados paralelos aos eixos coordenados e quepode ser inscrito na região limitada pelas curvas y =
√1 − x2 e y = 0.
15. Para fazer um cilindro circular reto de um retângulo de folha de aço, colam-se duas bor-das paralelas da folha. Para dar rigidez ao cilindro cola-se um arame de comprimento lao longo da diagonal do retângulo. Ache a tangente do ângulo formado pela diagonal eo lado não colado, de tal modo que o cilindro tenha volume máximo.
16. Um sólido é construido, colando um cilindro circular reto de altura h e raio r a umasemi-esfera de raio r. Se a área do sólido é 5π, determine r e h para que o volume sejamáximo.
17. Suponha que a resistência de uma viga retangular é dada pela fórmula: R = l h2, onde le h são, respectivamente, a largura e a altura da seção da viga. Determine as dimensõesda viga mais resistente que pode ser cortada de um tronco de árvore cilíndrico de raio a.
18. Uma janela tem forma de um retângulo, tendo acima um triângulo equilátero. Sabendo-se que o perímetro da janela é igual a 4 metros, determine as dimensões do retângulo queproporciona a área máxima para a janela.
19. A diferença de dois número é 20. Determine os números de modo que o produto seja omenor possível.
20. A soma de duas vezes um números e cinco vezes um segundo número é 70. Determineos números de modo que o produto seja o maior possível.
21. Determine as dimensões do retângulo de maior perímetro que pode ser inscrito na elipse:
x2
a2+
y2
b2= 1;
a, b 6= 0.
22. Se a velocidade de uma onda de comprimento L, em águas profundas, é dada por:
v = M
√
L
B+
B
L,
onde M e B são constantes positivas, qual é o comprimento da onda que minimiza avelocidade?

5.5. EXERCÍCIOS 169
23. A taxa aeróbica de uma pessoa com x anos de idade é dada por:
A(x) =110 (ln(x) − 2)
x,
sendo x ≥ 11. Em que idade a pessoa tem capacidade aeróbica máxima?
24. Com um fio de comprimento 2 a constroi-se um arco de círculo de modo que a área dosegmento circular que determina seja máxima. Qual é o raio?
25. Se uma droga é injetada na corrente sanguínea, sua concentração t minutos depois é dadapor C(t) = k (e−2t − e−3t), onde k é uma constante positiva.
(a) Em que instante ocorre a concentração máxima?
(b) Que se pode dizer sobre a concentração após um longo período de tempo?
26. A vazão de água de uma represa é modelada por:
f(t) =10
(t − 6)2 + 1,
se 0 ≤ t ≤ 12, onde t é o tempo em meses. Determine quando a vazão foi máxima.
27. Suponha que numa experiência realizada foram coletados os seguintes pares de dados:
(x1, y1), (x2, y2), ..................., (xn−1, yn−1), (xn, yn),
tais que os xi não são todos iguais. A teoria subjacente à experiência sugere que os dadosdevem estar ao longo de uma reta y = m x. Devido a erros experimentais, os pontos nãosão colineares. O problema consiste em determinar a reta que melhor se ajusta aos dados,ou seja, consiste em determinarm demodo que a soma dos desvios verticais seja mínima.O ponto sobre a reta y = m x que está mais próximo (distância vertical) dos pontos dadostem coordenadas (xi,m xi); logo o quadrado da distância vertical a estes pontos é:
Ei = (m xi − yi)2, 1 ≤ i ≤ n.
(a) Minimize a função:
f(m) = E1 + E2 + ........ + En =n
∑
i=1
(m xi − yi)2
(b) Ache a reta que melhor se ajusta aos pontos (−2,−1), (0, 0), (1, 2), (3, 1) e (4, 3).

170 CAPÍTULO 5. VARIAÇÃO DE FUNÇÕES

Capítulo 6
INTEGRAÇÃO INDEFINIDA
6.1 Introdução
Na primeira parte do capítulo mostraremos como obter uma função conhecendo apenas a suaderivada. Este problema é chamado de integração indefinida.
Definição 6.1. Uma função F (x) é chamada uma primitiva da função f(x) no intervalo I se para todox ∈ I , tem-se:
F ′(x) = f(x)
Muitas vezes não faremos menção ao intervalo I , mas a primitiva de uma função sempre serádefinida sobre um intervalo.
Definição 6.2. Seja F (x) uma primitiva da função f(x) no intervalo I . A expressão F (x) + c, c ∈ R
é chamada a integral indefinida da função f e é denotada por:
∫
f(x) dx = F (x) + c
Logo:∫
f(x) dx = F (x) + c ⇐⇒ F ′(x) = f(x)
em particular:∫
f ′(x) dx = f(x) + c.
Assim, a integral indefinida permite que encontremos uma família de primitivas de f(x).
A sintaxe para o cálculo da integral indefinida de uma função é:
>int(função,variável)+C;
ou de forma mais didática:
>Int(função,variável)=int(função,variável)+C;
171
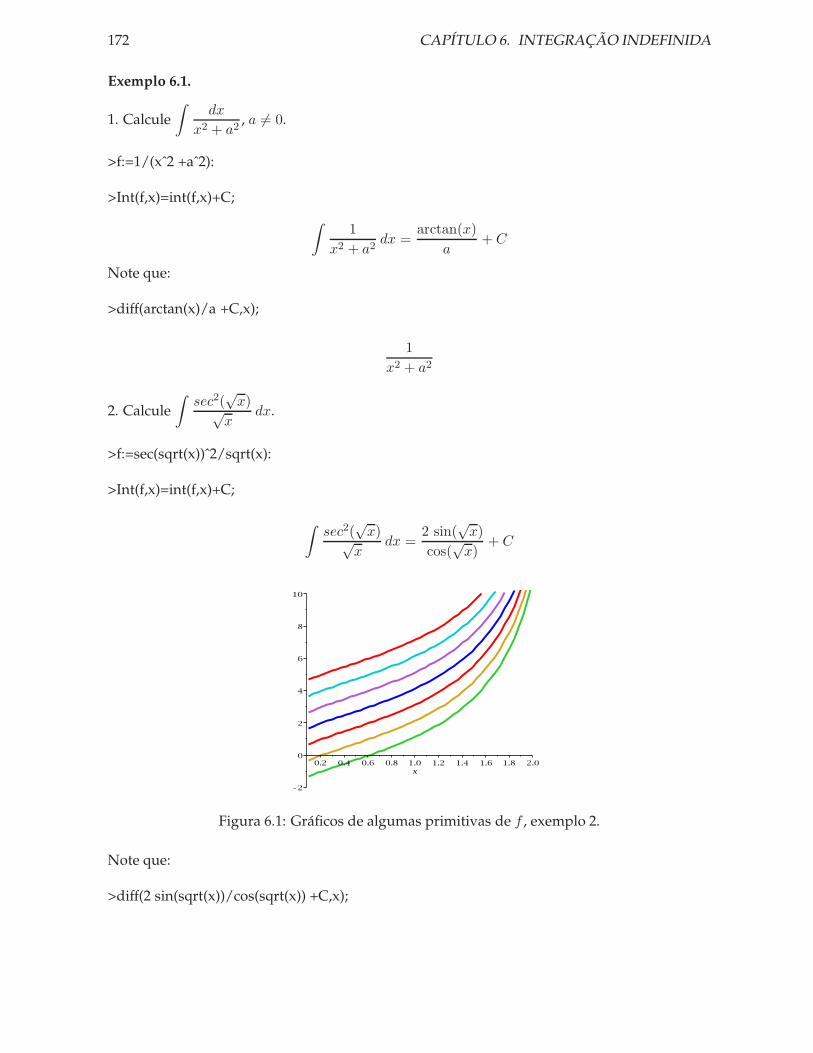
172 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
Exemplo 6.1.
1. Calcule∫
dx
x2 + a2, a 6= 0.
>f:=1/(xˆ2 +aˆ2):
>Int(f,x)=int(f,x)+C;
∫
1
x2 + a2dx =
arctan(x)
a+ C
Note que:
>diff(arctan(x)/a +C,x);
1
x2 + a2
2. Calcule∫
sec2(√
x)√x
dx.
>f:=sec(sqrt(x))ˆ2/sqrt(x):
>Int(f,x)=int(f,x)+C;
∫
sec2(√
x)√x
dx =2 sin(
√x)
cos(√
x)+ C
Figura 6.1: Gráficos de algumas primitivas de f , exemplo 2.
Note que:
>diff(2 sin(sqrt(x))/cos(sqrt(x)) +C,x);

6.1. INTRODUÇÃO 173
sec2(√
x)√x
3. Calcule∫
dx
x2 + 2x + 5.
>f:=1/(xˆ2 +2*x+5):
>Int(f,x)=int(f,x)+C;
∫
dx
x2 + 2x + 5=
1
2arctan
(1
2x +
1
2
)
+ C
Note que:
>diff(arctan(x/2 +1/2)/2 +C,x);
1
x2 + 2x + 5
4. Calcule∫
eax sen(b x) dx; a, b 6= 0.
>f:=exp(a*x)*sin(b*x):
>Int(f,x)=int(f,x)+C;
∫
eax sen(bx) dx =eax (−cos(b x) b + a sin(b x))
a2 + b2+ C
Note que:
>diff(exp(a*x)*(-cos(b*x)*b+a*sin(b*x))/(aˆ2 +bˆ2) +C,x);
eax sen(bx)
Muitas vezes o MAPLE não consegue calcular de forma eficiente uma integral. Por exemplo,considere:
∫
x (x + 1)3000 dx
O Maple, antes de calcular a integral, desenvolve o binômio, o utiliza uma grande parte damemória do computador. Convidamos ao leitor a digitar:
> int(x ∗ (x + 1)3000,x);

174 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
Veja o último exemplo do próximo parágrafo.
Existem funções cujas primitivas não podem ser expressas em termos de funções elementa-res. Veja o seguinte exemplo:
Exemplo 6.2.
1. Calcule∫
e−x2dx.
>f:=exp(xˆ2):
>Int(f,x)=int(f,x)+C;∫
e−x2dx =
1
2
√π erf(x) + C,
onde erf(x) é a chamada função erro, que não é elementar, a qual será revista nos próximoscapítulos.
É interessante e importante entender os passos intermediários que o MAPLE realiza paracalcular as integrais indefinidas.
6.2 Método de Substituição
Sejam F uma primitiva de f num intervalo I e g uma função derivável tal que F ◦ g estejadefinida. Usando a regra da cadeia; temos:
(
F (g(x)))′
= F ′(g(x)) · g′(x) = f(g(x)) · g′(x).
Logo, F (g(x)) é uma primitiva de f(g(x)) · g′(x), então:
∫
f(g(x)) · g′(x) dx = F (g(x)) + c;
fazendo u = g(x), tem-se du = g′(x) dx; substituindo na expressão anterior:
∫
f(g(x)) · g′(x) dx =
∫
f(u) du = F (u) + c
A sintaxe é:
>with(student):
>f:=função:
>a:=Int(f,variável);
>a1:=changevar(equação que define a mudança=u,a,u);
>a2:=value(a1);
>Int(f,x)=subs(u=equação que define a mudança,a1)+C;

6.2. MÉTODO DE SUBSTITUIÇÃO 175
Exemplo 6.3.
1. Calcule∫
2x
x2 + 1dx.
>with(student):
>f:=2*x/(xˆ2 +1):
>a:=Int(f,x);
a :=
∫
2x
x2 + 1dx
>a1:=changevar(xˆ2 +1 =u,a,u);
a1 :=
∫
1
udu
integral imediata:
>a2:=value(a1);
a2 := ln(u)
>Int(f, x) = subs(u = xˆ2+1, a2)+C;∫
2x
x2 + 1dx = ln(x2 + 1) + C
2. Calcule∫
sec2(√
x)√x
dx.
>with(student):
>f:=sec(sqrt(x))ˆ2 /sqrt(x)):
>a:=Int(f,x);
a :=
∫
sec2(√
x)√x
dx
>a1:=changevar(sqrt(x)=u,a,u);
a1 :=
∫
2 sec(u)2 du
integral imediata:
>a2:=value(a1);
a2 :=2 sin(u)
cos(u)

176 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
>Int(f, x) = subs(u = sqrt(x), a2)+C;
∫
sec2(√
x)√x
dx =2 sin(
√x)
cos(√
x)+ C
3. Calcule∫
x cos(x2) sen(sen(x2)) dx.
>with(student):
>f:=x*cos(xˆ2)*sin(sin(xˆ2)):
>a:=Int(f,x);
a :=
∫
x cos(x2) sen(sen(x2)) dx
>a1:=changevar(sin(xˆ2 )=u,a,u);
a1 :=
∫
1
2sin(u) du
integral imediata:
>a2:=value(a1);
a2 := −1
2cos(u)
>Int(f, x) = subs(u =sin(xˆ 2), a2)+C;∫
x cos(x2) sen(sen(x2)) dx = −1
2cos(sin(x2)) + C
4. Calcule∫
x (x + 1)3000 dx
>with(student):
>f:=x*(x+1)ˆ3000:
>a:=Int(f,x);
a :=
∫
x (x + 1)3000 dx
>a1:=changevar(x+1=u,a,u);
a1 :=
∫
(−1 + u)u3000 du
>a2:=value(a1);

6.3. MÉTODO DE INTEGRAÇÃO POR PARTES 177
a2 := −u3001
3001+
u3002
3002
>Int(f, x) = subs(u =x+1, a2)+C;∫
x (x + 1)3000 dx = −(x + 1)3001
3001+
(x + 1)3002
3002+ C
6.3 Método de Integração por Partes
Sejam f e g funções deriváveis no intervalo I . Derivando o produto f · g:(
f(x) g(x))′
= f ′(x) g(x) + f(x) g′(x),
ou, equivalentemente, f(x) g′(x) = (f(x) g(x))′ − f ′(x) g(x). Integrando ambos os lados:∫
f(x) g′(x) dx = f(x) g(x) −∫
f ′(x) g(x) dx;
fazendo: u = f(x) e dv = g′(x) dx, temos: du = f ′(x) dx e v = g(x). Logo:
∫
f(x) g′(x) dx =
∫
u dv = u v −∫
v du
Este método de integração nos permite transformar a integração de u dv na integração de v du.É importante saber “escolher” a substituição u e dv na integral de partida. Devemos escolherv′ tal que permita determinar v. As expressões de u′ e v devem ser mais simples que as de u ev′, respectivamente.
A sintaxe que utilizaremos é:
>with(student):
>f:=função:
>a:=Int(f,variável);
>a1:=intparts(a, função que foi chamada de u);
>a2:=value(a1);
>Int(f,x)=a2+C;
Exemplo 6.4.
1. Calcule∫
ln(x) dx.
>with(student):
>f:=ln(x):
>a:=Int(f,x);

178 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
a :=
∫
ln(x) dx
>a1:=intparts(a,ln(x));
a1 := x ln(x) −∫
(1) dx
>a2:=value(a1);
a2 := x ln(x) − x
>Int(f,x)=a2+C;∫
ln(x) dx = x ln(x) − x + C
2. Calcule∫
x sen(x) dx.
>with(student):
>f:=x*sin(x):
>a:=Int(f,x);
a :=
∫
x sen(x) dx
>a1:=intparts(a,x);
a1 := −x cos(x) −∫
(−cos(x)) dx
>a2:=value(a1);
a2 := −x cos(x) + sin(x)
>Int(f,x)=a2+C;∫
x sen(x) dx = −x cos(x) + sin(x) + C
3. Calcule∫
(x3 + 5) ln(x) dx.
>with(student):
>f:=(xˆ3 +5)*ln(x):
>a:=Int(f,x);
a :=
∫
(x3 + 5) ln(x) dx

6.4. MÉTODO PARA INTEGRAÇÃO DE FUNÇÕES RACIONAIS 179
>a1:=intparts(a,ln(x));
a1 := ln(x)(1
4x4 + 5x
)
−∫
1
4x4 + 5x
xdx
>a2:=value(a1);
a2 := ln(x)(1
4x4 + 5x
)
− 1
16x4 − 5x
>Int(f,x)=a2+C;∫
(x3 + 5) ln(x) dx = ln(x)(1
4x4 + 5x
)
− 1
16x4 − 5x + C
6.4 Método para Integração de Funções Racionais
Um polinômio P (x) não constante de coeficientes reais pode ser sempre expresso como umproduto de fatores lineares e/ou quadráticos, sendo que os fatores quadráticos são irredutíveissobre os reais. Naturalmente esta decomposição depende essencialmente do grau de P (x).
P (x) = (a1 x2 + b1x + c1)s1 (a2 x2 + b2x + c2)
s2 ......(al x2 + blx + cl)
sl(x − d1)r1 . . . (x − dn)rn ,
onde ri, sj ∈ N, i = 1 . . . n e j = 1 . . . l tais que não todos os ri e sj sejam nulos.
Exemplo 6.5.
[1] P (x) = x2 − 3x + 2 = (x − 2) (x − 1).
[2] P (x) = x3 + 4x2 + 5x + 2 = (x + 1)2 (x + 2).
[3] P (x) = x3 − x2 + x − 1 = (x2 + 1) (x − 1).
[4] P (x) = x8 + x7 − 9x6 + 3x5 − 33x4 + 3x3 − 35x2 + x − 12 = (x2 + 1)5 (x − 3) (x + 4).
[5] P (x) = x4 + x3 + 2x2 + x + 1 = (x2 + 1) (x2 + x + 1).
Seja uma função racional:
P (x)
Q(x).
A decomposição de uma função racional em frações mais simples, depende da fatoração dopolinômio Q(x). Se numa função racional o grau de P (x) é maior ou igual ao grau de Q(x),então podemos dividir os polinômios. De fato, se grau(P (x)) ≥ grau(Q(x)) então
P (x) = Q(x)A(x) + R(x),
onde grau(R(x)) < grau(Q(x)); então,P (x)
Q(x)= A(x) +
R(x)
Q(x). Logo, basta estudar o caso em
que:grau(P (x)) < grau(Q(x)),

180 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
pois, caso contrário efetuamos a divisão dos polinômios.
Essencialmente temos os seguintes casos:
Caso 1: Q(x) se decompõe em fatores lineares distintos.
Caso 2: Q(x) se decompõe em fatores lineares, alguns deles repetidos.
Caso 3: Q(x) se decompõe em fatores lineares e fatores quadráticos irredutíveis, sendo que osfatores quadráticos não se repetem.
Caso 4: Q(x) se decompõe em fatores lineares e fatores quadráticos irredutíveis, sendo quealguns dos fatores quadráticos se repetem.
A sintaxe utilizada para decompor uma função racional em frações mais simples é:
>with(student):
>f:=função racional:
>a:=Int(f, x);
>b:=convert(integrand(a), parfrac, x);
>a1:=Int(b, x);
>Int(f,x)=value(a1)+C;
Exemplo 6.6.
1. Calcule∫
x3 + 3x − 1
x4 − 4x2dx.
>with(student):
>f:=(xˆ3+3*x-1)/(xˆ4 -4*xˆ2):
>a:=Int(f,x);
a :=
∫
x3 + 3x − 1
x4 − 4x2dx
>b:=convert(integrand(a), parfrac, x);
b :=15
16 (x + 2)+
1
4x2− 3
4x+
13
16 (x − 2)
>a1:=Int(b,x);
a1 :=
∫(
15
16 (x + 2)+
1
4x2− 3
4x+
13
16 (x − 2)
)
dx
>Int(f,x)=value(a1)+C;

6.4. MÉTODO PARA INTEGRAÇÃO DE FUNÇÕES RACIONAIS 181
∫
x3 + 3x − 1
x4 − 4x2dx =
13
16ln(x − 2) − 1
4x− 3
4ln(x) +
15
16ln(x + 2) + C
2. Calcule∫
3x2 + 4x + 2
x3 + 2x2 + xdx.
>f:=(3*xˆ2+4*x+2)/(xˆ3+2*xˆ2+x):
>a:=Int(f,x);
a :=
∫
3x2 + 4x + 2
x3 + 2x2 + xdx
>b:=convert(integrand(a), parfrac, x);
b :=2
x− 1
(x + 1)2+
1
x + 1
>a1:=Int(b,x);
a1 :=
∫(
2
x− 1
(x + 1)2+
1
x + 1
)
dx
>Int(f,x)=value(a1)+C;∫
3x2 + 4x + 2
x3 + 2x2 + xdx = 2 ln(x) +
1
x + 1+ ln(x + 1) + C
3. Calcule∫
3x3 − 12x2 + 13x − 7
x4 − 4x3 + 5x2 − 4x + 4dx.
>f:=(3*xˆ3-12*xˆ2 +13*x-7)/(xˆ4 -4*xˆ3+5*xˆ2 -4*x+4):
>a:=Int(f,x);
a :=
∫
3x3 − 12x2 + 13x − 7
x4 − 4x3 + 5x2 − 4 ∗ x + 4dx
>b:=convert(integrand(a), parfrac, x);
b :=2x − 1
x2 + 1− 1
(x − 2)2+
1
x − 2
>a1:=Int(b,x);
a1 :=
∫(
2x − 1
x2 + 1− 1
(x − 2)2+
1
x − 2
)
dx
>Int(f,x)=value(a1)+C;∫
3x3 − 12x2 + 13x − 7
x4 − 4x3 + 5x2 − 4 ∗ x + 4dx = ln(x2 + 1) − arctan(x) +
1
x − 2+ ln(x − 2) + C

182 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
6.5 Exercícios
1. Calcule as seguintes integrais usando o método de substituição:
(a)∫
x5√
x2 − 1dx
(b)∫
3x
x2 + 1dx
(c)∫ √
x + 5 dx
(d)∫
dy√b − ay
(e)∫
y(b − ay2) dy
(f)∫
4x2
√x3 + 8
dx
(g)∫
6x
(5 − 3x2)2dx
(h)∫
dy
(b + ay)3
(i)∫
x3√
a + bx4 dx
(j)∫
ln(x) + 2
xdx
(k)∫
sen(2x) cos2(2x) dx
(l)∫
tg(x
2) sec2(
x
2) dx
(m)∫
cos(ax)dx√
b + sen(ax)
(n)∫
1
x(ln(x))2dx
(o)∫
x3
√1 + x4
dx
(p)∫
x2ex3dx
(q)∫
arcsen(y)
2√
1 − y2dy
(r)∫
ex
e2x + 16dx
(s)∫
sen(θ)
(5 − cos(θ))3dθ
(t)∫
x + 3
(x2 + 6x)2dx
(u)∫
dx
x ln(x)
(v)∫
earcsen(x)
√1 − x2
dx
(w)∫
sen(ln(x))
xdx
(x)∫
cos(√
x + 1)√1 + x
dx
(y)∫
x5
3√
x6 + 4dx
(z)∫
3x cos(3x) dx
2. Calcule as seguintes integrais, usando as substituições dadas:
(a)∫
dx
x√
x2 − 2, usex =
√2 sec(t)
(b)∫
dx
ex + 1, usex = −ln(t)
(c)∫
x dx√x + 1
, use t =√
x + 1
(d)∫
x dx√1 − x2
, usex = sen(t)
(e)∫
dx
1 +√
x,use z = 1 +
√x
(f)∫
dx√
1 + x13
, use z = 1 + 3√
x
3. Calcule as seguintes integrais usando o método de integração por partes:

6.5. EXERCÍCIOS 183
(a)∫
3x cos(x) dx
(b)∫
x arctg(x) dx
(c)∫
e1x
x3dx
(d)∫
x3
√1 − x2
dx
(e)∫
x cosec2(x) dx
(f)∫
x sec(x) tg(x) dx
(g)∫
x3 sen(5x) dx
(h)∫
x4 cos(2x) dx
(i)∫
x4e−x dx
(j)∫
x arcsen(x)√1 − x2
dx
(k)∫
x sec2(x) dx
(l)∫
ln3(x) dx
(m)∫
sen2(x)
cos4(x)dx
(n)∫
tg5(x)sec3(x) dx
(o)∫
cos4(x)
sen6(x)dx
(p)∫
sen4(ax) dx
(q)∫
sen3(y) cos4(y) dy
(r)∫
sen4(x)
cos6(x)dx
4. Calcule as seguintes integrais:
(a)∫
√16 − x2
x2dx
(b)∫
dx
x3√
x2 − 9
(c)∫
dx
(4x − x2)32
(d)∫
√
x2 + 2 dx
(e)∫
dx
(1 + x2)√
1 − x2
(f)∫
dx
(1 − x2)√
1 + x2
(g)∫
dx
x2√
x2 − 4
(h)∫
7x3
(4x2 + 9)32
dx
(i)∫
(√
1 + x2 + 2x) dx
(j)∫
ex
√ex + 1
dx
(k)∫
x + 1√x2 − 1
dx
(l)∫
dx
x2√
x2 + 4
(m)∫ sen(x)
(25−cos2(x))32
dx
(n)∫
dx
x((ln(x))2−4)32
(o)∫ cos(x)√
4+sen2(x)dx
(p)∫
dx√−3 + 8x − 4x2
(q)∫
x√1 − x + 3x2
dx
(r)∫
2x
(x2 + 3x + 4)2dx
(s)∫
dx√x2 + 3x + 5
(t)∫
dx√x2 − x − 1
(u)∫
5x + 3√4x2 + 3x + 1
dx

184 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA
(v)∫
dx√4x − x2 − 3
(w)∫
1 − 2x√2x − x2 + 3
dx
(x)∫
x√x2 − 3x + 4
dx
(y)∫
x + 2√x2 + 6x + 34
dx
5. Calcule as seguintes integrais, usando frações parciais:
(a)∫
dx
x3 + 8
(b)∫
4dx
x4 − 1
(c)∫
x5 + 4x3
(x2 + 2)3dx
(d)∫
x3 + 3x
(x2 + 1)2dx
(e)∫
dx
x4 + x2
(f)∫
x3 + x − 1
(x2 + 1)2dx
(g)∫
x4 + 8x3 − x2 + 2x + 1
(x2 + x)(x3 + 1)dx
(h)∫
dx
x3(x2 + 1)
(i)∫
x + 1
(x2 + 4x + 5)2dx
(j)∫
x3 + x + 1
x(1 + x2)dx
(k)∫
x3 + 1
(x2 − 4x + 5)2dx
(l)∫
dx
(x + 1)(x2 + x + 1)2
(m)∫
dx
x8 + x6
(n)∫
3x + 1
x2 − x + 1dx
(o)∫
dx
x4 − 3x3 + 3x2 − x
(p)∫
x
x4 − 1dx
(q)∫
5x3 − 3x2 + 2x − 1
x4 + 9x2dx
(r)∫
x5 + 4x3 + 3x2 − x + 2
x5 + 4x3 + 4xdx
(s)∫
2x + 2
x(x2 + 2x + 2)2dx
(t)∫
dx
x3 + 3x2 + 7x + 5
(u)∫
x2 − 3x + 2
x3 + 6x2 + 5xdx
(v)∫
3x3 + x2 + x − 1
x4 − 1dx
6. Calcule as seguintes integrais:
(a)∫
cos(x) ln(sen(x)) dx
(b)∫
x 5x dx
(c)∫
x5 cos(x3) dx
(d)∫
tg(x) sec3(x) dx
(e)∫
cos(3x) cos(4x) dx
(f)∫
x√
(x2 + 4)5dx
(g)∫
dx√x2 + 4x + 8
(h)∫
et√
9 − e2t dt
(i)∫
x2 + 2x
x3 + 3x2 + 4dx
(j)∫
x − 3
(x2 + 2x + 4)2dx
6.5. EXERCÍCIOS 185
(k)∫
x4 + 1
x (x2 + 1)dx
(l)∫
sen(x) cos2(x)
5 + cos2(x)dx
(m)∫
x2
(x + 1)3dx
(n)∫
dx
4x2 + 12x − 7
(o)∫
2x + 3
x3 + 3xdx
(p)∫
3x2 − 4x + 5
(x − 1) (x2 + 1)dx
(q)∫
x3
3√
x2 + 1dx
(r)∫ √
x
x + 1dx
(s)∫
dx
(x2 + 9)√
x2 + 4
(t)∫
dx
(x − 1)√
x2 + 2x − 2
(u)∫
dx
1 + 2 sen(x) cos(x) + sen2(x)
(v)∫
2 cos2(x2 )
x + sen(x)dx
(w)∫
1 − tg2(x)
sec2(x) + tg(x)dx
(x)∫
dx
(x + 3)√
x − 1dx

186 CAPÍTULO 6. INTEGRAÇÃO INDEFINIDA

Capítulo 7
INTEGRAÇÃO DEFINIDA
7.1 Intodução
Neste capítulo introduziremos a noção de integral definida, cuja origem foi a formalizaçãomatemática da idéia do cálculo de áreas de regiões planas delimitadas pelos gráficos de fun-ções.
Observemos que somente "sabemos"calcular, efetivamente, a área de regiões limitadas por seg-mentos de retas como retângulos, triângulos ou composições destes. Como motivação, come-çaremos com um problema.
Problema: Seja f : [a, b] −→ R uma função contínua, não negativa. Calcule a área da regiãoplana R delimitada pelo gráfico de y = f(x), pelas retas x = a, x = b e o eixo dos x.
a b
Figura 7.1: Área da região dada no problema.
Solução do Problema: O subconjunto P = {x0, x1, ......, xn} ⊂ [a, b] é chamado de partiçãode ordem n do intervalo [a, b] se:
a = x0 < x1 < x2 < ......... < xn−1 < xn = b.
Subdividamos o intervalo [a, b] em n subintervalos, escolhendo os pontos da partição P . For-memos os seguintes subintervalos:
187

188 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
[x0, x1], [x1, x2], ........, [xn−1 , xn].
Denotemos qualquer destes subintervalos por [xi−1, xi], i variando de 1 até n.
Seja ∆xi = xi − xi−1 o comprimento do subintervalo [xi−1, xi], i variando de 1 até n. Note queestes subintervalos não tem necessariamente o mesmo comprimento. Para cada i, variando de1 até n, consideremos o retângulo Ri limitado pelas retas x = xi−1, x = xi e altura y = f(ci),onde ci ∈ [xi−1, xi].
Figura 7.2: Subdivisão da região.
Obtemos assim n retângulos Ri. É intuitivo que a soma das áreas dos n retângulos é uma apro-ximação da área da região R. Se n é muito grande ou, equivalentemente, se n cresce, então∆xi, a base do retângulo correspondente, é muito pequena e a soma das áreas dos n retângulosaproxima-se cada vez mais da área da região R.
Figura 7.3: Nova subdivisão da região.
A área de cada Ri é f(ci) × ∆xi (base por altura); a soma Sn das áreas dos n retângulos é:
Sn =
n∑
i=1
f(ci)∆xi.

7.1. INTODUÇÃO 189
A soma Sn é chamada uma soma de Riemann da função f . Denotemos por |∆xi| a maior me-dida dentro os ∆xi. A área de uma região plana R delimitada pelo gráfico da função contínuay = f(x), definida no intervalo [a, b] e pelas retas x = a e x = b é:
A(R) = lim|∆xi|→0
n∑
i=1
f(ci)∆xi.
É possível provar com rigor matemático que, quando a função é contínua, este limite sempreexiste e é igual a área de R; mais ainda, este limite não depende da escolha da partição dointervalo [a, b] ou da escolha dos pontos ci. Para mais detalhes veja a bibliografia intermediáriae avançada.
No MAPLE, utilizaremos as seguintes sintaxes:
>with(student):
leftsum(f(x), x=a..b, n): A soma de Riemann com n subintervalos de comprimentos iguais e aescolha de cada ci como sendo a extremidade esquerda de cada subintervalo.
leftbox(f(x), x=a..b, n): Esboça o gráfico de leftsum.
middlesum(f(x), x=a..b, n): A soma de Riemann com n subintervalos de comprimentos iguaise a escolha de cada ci como sendo o ponto médio de cada subintervalo.
middlebox(f(x), x=a..b, n): Esboça o gráfico de middlesum.
rightsum(f(x), x=a..b, n): A soma de Riemann com n subintervalos de comprimentos iguais ea escolha de cada ci como sendo a extremidade direita de cada subintervalo.
rightbox(f(x), x=a..b, n): Esboça o gráfico de rightsum.
Nas versões mais recentes do MAPLE, podemos utilizar a seguinte sintaxe, para fazer anima-ções:
>with(Student[Calculus1]):
>RiemannSum(função, x =a..b, method = left ou right ou middle, output = animation);
Exemplo 7.1.
1. Calcule a área da região limitada pelo gráfico da função y = f(x) = x2, o eixo dos x e pelasretas x = 0 e x = 1.

190 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
Figura 7.4: Área limitada por y = f(x) = x2.
O intervalo de integração é [0, 1] e f(x) = x2.
a) Consideremos a seguinte partição de ordem 4 de [0, 1]:
x0 = 0 < x1 =1
4< x2 =
1
2< x3 =
3
4< x4 = 1;
Os subintervalos são: [0,1
4], [
1
4,1
2], [
1
2,3
4] e [
3
4, 1] e ∆xi =
1
4, para cada i.
>with(student):
>f:=xˆ2:
>leftsum(f,x=0..1,4);
1
4
3∑
i=0
1
16i2
>value( );
7
32
Note que escolhemos:
ci 01
4
1
2
3
4
f(ci) 01
16
1
4
9
16
Logo:
1
4× 0 +
1
4× 1
16+
1
4× 1
4+
1
4× 9
16=
7
32.

7.1. INTODUÇÃO 191
>leftbox(f,x=0..1,4);
Figura 7.5: Partição da região.
Agora, façamos:
>rightsum(f,x=0..1,4);
1
4
4∑
i=1
1
16i2
>value( );
15
32
Note que se escolhemos:
ci1
4
1
2
3
41
f(ci)1
16
1
4
9
161
Logo:
1
4× 1
16+
1
4× 1
4+
1
4× 9
16+
1
4× 1 =
15
32.
>rigtbox(f,x=0..1,4);

192 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
Figura 7.6: Partição da região.
É intuitivo que:
7
32≤ A(R) ≤ 15
32.
b) Consideremos a seguinte partição de ordem n:
x0 = 0 < x1 =1
n< x2 =
2
n< x3 =
3
n< .................. < xn =
n
n= 1.
∆xi =1
n.
Se escolhemos c1 = 0, c2 =1
n, c3 =
2
n,............, cn =
n − 1
n:
>leftsum(f,x=0..1,n);
n−1∑
i=0
i2
n2
n
>value( );
1
6
(2n − 1) (n − 1)
n2
Logo:
n−1∑
i=0
i2
n3=
(n − 1) (2n − 1)
6n2.
Se escolhemos c1 =1
n, c2 =
2
n, c3 =
3
n,............, cn =
n
n:
>rightsum(f,x=0..1,n);

7.1. INTODUÇÃO 193
n∑
i=1
i2
n2
n
>value( );
1
6
(2n + 1) (n + 1)
n2
Logo:
n∑
i=1
i2
n3=
(n + 1) (2n + 1)
6n2.
Figura 7.7: Nova partição da região.
Então,
(n − 1) (2n − 1)
6n2≤ A(R) ≤ (n + 1) (2n + 1)
6n2.
Por outro lado:
limn→+∞
(n − 1) (2n − 1)
6n2= lim
n→+∞(n + 1) (2n + 1)
6n2=
1
3;
então,
A(R) =1
3
Agora, façamos uma animação:
>with(Student[Calculus1]):
>RiemannSum(f, x = 0 .. 1, method = left, output = animation);

194 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
Figura 7.8: Um frame da animação.
Façamos uma tabela para comparar o resultado, com as diversas partições e o erro do calculo.
>with(student):
>for i to 10 do j := 2000*i:
>LE[i] := evalf(leftsum(f(x), x = 0 .. 1, j)):
>RI[i] := evalf(rightsum(f(x), x = 0 .. 1, j)):
>MID[i] := evalf(middlesum(f(x), x = 0 .. 1, j)):
>Er[i] := RI[i]-LE[i]:
>fil[i] := [j,LE[i], RI[i], MID[i], Er[i]] :
>end do:
>array([fil[1], fil[2], fil[3], fil[4], fil[5], fil[6], fil[7], fil[8], fil[9], fil[10]]);

7.1. INTODUÇÃO 195
2000 0.3330833750 0.3335833750 0.3333333125 0.0005000000
4000 0.3332083438 0.3334583438 0.3333333280 0.0002500000
6000 0.3332500047 0.3334166714 0.3333333311 0.0001666667
8000 0.3332708359 0.3333958359 0.3333333320 0.0001250000
10000 0.3332833350 0.3333833350 0.3333333325 0.0001000000
12000 0.3332916678 0.3333750012 0.3333333327 0.0000833334
14000 0.3332976199 0.3333690485 0.3333333329 0.0000714286
16000 0.3333020840 0.3333645840 0.3333333330 0.0000625000
18000 0.3333055561 0.3333611116 0.3333333331 0.0000555555
20000 0.3333083338 0.3333583338 0.3333333331 0.0000500000
2. Calcule a área da região limitada pelo gráfico da função y = f(x) = e−x2, o eixo dos x e pelas
retas x = −2 e x = 2.
Figura 7.9: Área limitada por y = f(x) = e−x2.
Utilizemos a opção: middle:
>with(student):
>f:=exp(-xˆ2):
>middlesum(f,x=-2..2,n);
4
n
n−1∑
i=0
e−4(−n+2i+1)2/n2
>limit(% , n = infinity);
√π erf(2)
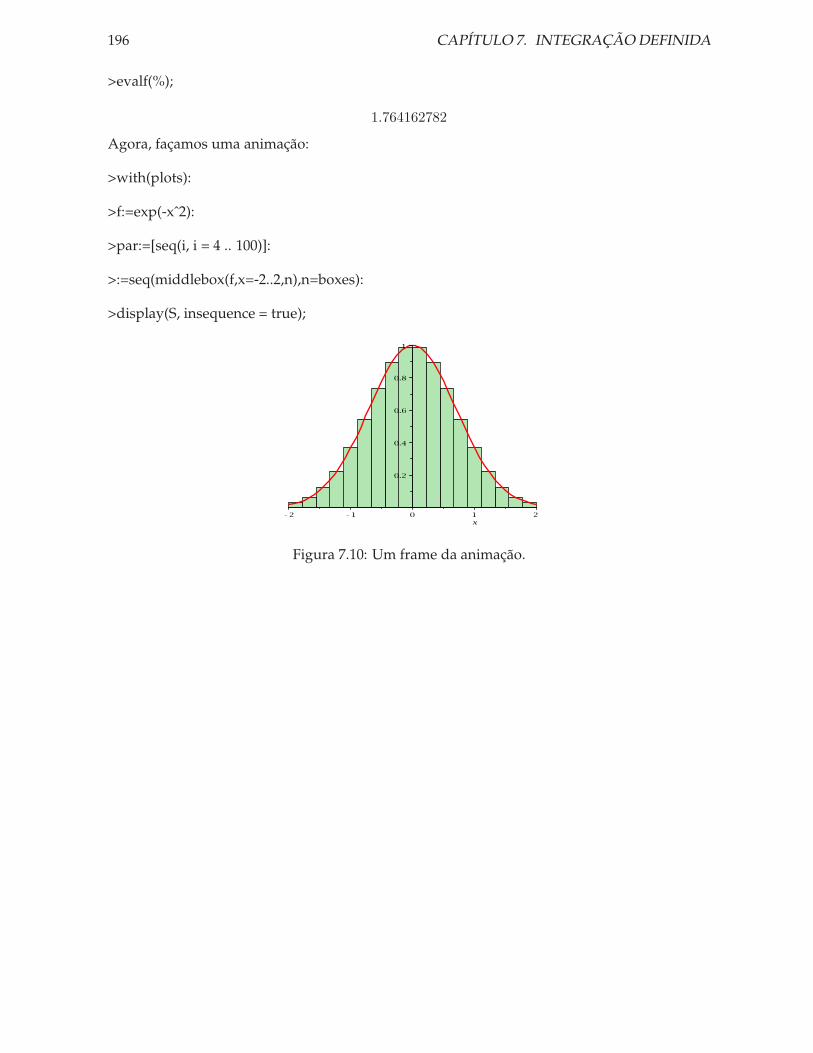
196 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
>evalf(%);
1.764162782
Agora, façamos uma animação:
>with(plots):
>f:=exp(-xˆ2):
>par:=[seq(i, i = 4 .. 100)]:
>:=seq(middlebox(f,x=-2..2,n),n=boxes):
>display(S, insequence = true);
Figura 7.10: Um frame da animação.

7.2. DEFINIÇÃO E CÁLCULO DA INTEGRAL DEFINIDA 197
7.2 Definição e Cálculo da Integral Definida
Definição 7.1. Sejam f uma função definida no intervalo [a, b], P uma partição qualquer do intervalo[a, b] e ci um ponto qualquer em cada subintervalo definido pela partição. A integral definida de f dea até b é denotada por:
∫ b
af(x) dx
e definida por:
∫ b
af(x) dx = lim
|∆xi|→0
n∑
i=1
f(ci)∆xi
se o limite existe.
Se o limite da definição existe, é independente das escolhas feitas, como no caso da definiçãode área. Portanto, deve ter sempre um único valor.
Se f é contínua e não negativa em [a, b] a definição de integral definida coincide com a defini-ção de área da região R delimitada pelo gráfico de f , pelas retas x = a, x = b e pelo eixo dos x(g = 0):
Figura 7.11: A região R.
R = {(x, y) /a ≤ x ≤ b, 0 ≤ y ≤ f(x)}Neste caso teremos:
A(R) =
∫ b
af(x) dx
Os números a e b são chamados limites inferior e superior de integração.
Definição 7.2. Uma função f definida em [a, b] é dita integrável em [a, b] se sua integral definidaexiste.

198 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
Algumas das provas deste capítulo serão omitidas, pois fogem do objetivo destas notas. Umleitor interessado pode recorrer à bibliografia indicada.
Teorema 7.1. Se a função f é contínua em [a, b], então é integrável em [a, b].
Observemos que a recíproca deste teorema é falsa. Por exemplo, considere a função:
f(x) =
{
1 se x ∈ [0, 1]
0 se x ∈ (1, 2].
f é descontínua, mas a região limitada pelo gráfico de f , possui área igual a 1 no intervalo [0, 1]e zero no intervalo (1, 2]; logo, f é integrável.
Propiedades da Integral Definida
Se f e g são funções integráveis em [a, b], então:
1. Linearidade da Integral. α f + β g é função integrável em [a, b], para todo α, β ∈ R e:
∫ b
a
[
α f(x) + β g(x)]
dx = α
∫ b
af(x) dx + β
∫ b
ag(x) dx
2. Monotonicidade da Integral. Se f(x) ≥ g(x) em [a, b]; então,
∫ b
af(x) dx ≥
∫ b
ag(x) dx
3. |f | é integrável e:
∣
∣
∣
∣
∫ b
af(x) dx
∣
∣
∣
∣
≤∫ b
a
∣
∣f(x)∣
∣ dx
4. Sejam a < c < b e f uma função integrável em [a, c] e [c, b] respectivamente. Então f éintegrável em [a, b] e:
∫ b
af(x) dx =
∫ c
af(x) dx +
∫ b
cf(x) dx

7.3. TEOREMA FUNDAMENTAL DO CÁLCULO E CONSTRUÇÃO DE PRIMITIVAS 199
7.3 Teorema Fundamental do Cálculo e Construção de Primitivas
Seja f : [a, b] −→ R uma função contínua. Definamos a função:
g(x) =
∫ x
af(t) dt.
Por exemplo, se f(x) = cos(x), então:
g(x) =
∫ x
0cos(t) dt = sen(x);
por outro lado observe que, g′(x) = cos(x) = f(x). Este fato pode ser generalizado. É o queestabelece o seguinte teorema.
Teorema 7.2. (Fundamental do Cálculo). Seja f : [a, b] −→ R uma função contínua. A função:
g(x) =
∫ x
af(t) dt
é derivável em (a, b), e:
g′(x) = f(x) ou g′(x) =d
dx
∫ x
af(t) dt = f(x)
Este resultado implica que toda função contínua possui uma primitiva.
Existem funções integráveis que não possuemprimitivas (não podem ser contínuas). Por exem-plo, a função definida por:
f(x) =
{
0 se x 6= 0
1 se x = 0;
f não é derivada de nenhuma função:
g(x) =
∫ x
af(t) dt = 0, para todo x.
Corolário 7.3. Se f é uma função integrável em [a, b] e admite uma primitiva F (x) em [a, b], então:
∫ b
af(x) dx = F (b) − F (a)
O corolário nos diz que para calcular a integral definida de uma função, basta procurar umaprimitiva da função e avaliá-la nos limites de integração. A integral definida é um número real.
Notação:
F (x)
∣
∣
∣
∣
b
a
= F (b) − F (a).

200 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
A sintaxe para o cálculo da integral definida de uma função é:
>int(função,x=a..b);
ou de forma mais didática:
>Int(função,x=a..b)=int(função,x=a..b);
Corolário 7.4. Na hipótese do corolário anterior, temos:
1.
∫ b
af(x) dx = −
∫ a
bf(x) dx.
2.
∫ a
af(x) dx = 0.
Corolário 7.5. Seja f : I −→ R contínua e α : J −→ R derivável; I e J são intervalos tais queα(J) ⊂ I . Então:
g(x) =
∫ α(x)
af(t) dt
é derivável e:
g′(x) = f(α(x))α′(x)
A sintaxe que utilizamos é:
>p:=Int(função,t=variação);
>diff(p,x);
Exemplo 7.2.
1. Uma primitiva de f(x) = sen(x6) é:
F (x) =
∫ x
0sen(t6) dt
De fato:
>p:=Int(sin(tˆ6),t=0..x);
p :=
∫ x
0sen(t6) dt
>diff(p,x);

7.3. TEOREMA FUNDAMENTAL DO CÁLCULO E CONSTRUÇÃO DE PRIMITIVAS 201
sin(x6)
2. Calcule∫ 1
−1|sen(π x)| dx.
>p:=abs(sin(Pi*x)):
>Int(p, x =-1..1) = int(p, x =-1..1);
∫ 1
−1|sin (π x)| dx =
4
π
Observamos que sen(π x) ≥ 0 se 0 ≤ x ≤ 1 e sen(π x) ≤ 0 se −1 ≤ x ≤ 0.∫
sen(π x) dx = −cos(π x)
π+ c.
Logo, :
>F:=x->-cos(Pi*x)/Pi):
>Int(p, x =0..1)-Int(p, x =-1..0) = F(1)-F(0)-(F(0)-F(-1));
∫ 1
0sen(π x) dx −
∫ 0
−1sen(π x) dx =
4
π
>Int(p, x =-1..1)=F(1)-F(0)-(F(0)-F(-1));
∫ 1
−1|sen(π x)| dx =
4
π
3. A função :
S(x) =
∫ x
0sen
(π t2
2
)
dt,
é chamada de Fresnel e aparece no estudo da difração de ondas de luz, calcule:
limx→0
S(x)
x3
O limite apresenta uma indeterminação do tipo (00); aplicamos L’Hôpital,
>p:=sin(Pi*tˆ2)/2):
>S:=Int(p,t=0..x):
>S’:=diff(S,x);
S′(x) = sen(π x2
2
)

202 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
logo:
limx→0
S(x)
x3= lim
x→0
S′(x)
3x2=
π
6.
Figura 7.12: Gráfico de S(x).
4. A função:
erf(x) =2√π
∫ x
0e−t2 dt
é chamada função erro.
Figura 7.13: Gráfico de erf(x).
Calcule a derivada de:
i) x erf(x).
ii) erf(√
x).
i) Seja:

7.4. DEFINIÇÃODE LOGARITMONATURAL 203
>p:=x*erf(x):
>diff(p,x);
erf (x) + 2x√πex2
logo:
d
dx
(
x erf(x))
= erf(x) +2x√
πe−x2
.
ii) Seja:
>p:=erf(sqrt(x)):
>diff(p,x);
e−x
√π√
x
7.4 Definição de Logaritmo Natural
Definição 7.3. A função ln : (0,+∞) −→ R é definida por:
ln(x) =
∫ x
1
dt
t
ln(x) é chamado logaritmo natural de x.
Proposição 7.1. Das propriedades da integral definida e do Teorema Fundamental do Cálculo, segueque:
1. ln(1) = 0
2. ln(x) < 0 se 0 < x < 1
3. ln(x) > 0 se x > 1
4. [ln(x)]′ =1
x
5. A função logarítmica é crescente.
7.4.1 Logaritmo como Área
Seja Hx a região limitada pelo gráfico da função f(t) = 1t , o eixo dos x e as retas t = 1 e t = x.
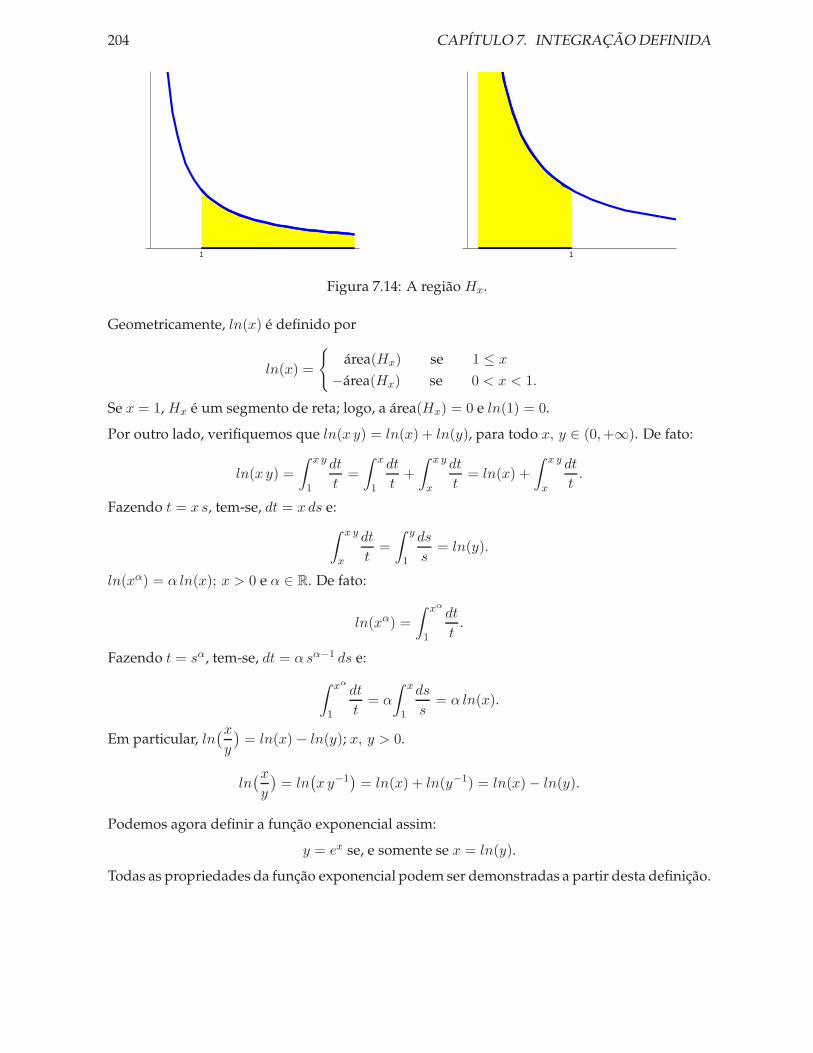
204 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
11 11
Figura 7.14: A região Hx.
Geometricamente, ln(x) é definido por
ln(x) =
{
área(Hx) se 1 ≤ x
−área(Hx) se 0 < x < 1.
Se x = 1, Hx é um segmento de reta; logo, a área(Hx) = 0 e ln(1) = 0.
Por outro lado, verifiquemos que ln(x y) = ln(x) + ln(y), para todo x, y ∈ (0,+∞). De fato:
ln(x y) =
∫ x y
1
dt
t=
∫ x
1
dt
t+
∫ x y
x
dt
t= ln(x) +
∫ x y
x
dt
t.
Fazendo t = x s, tem-se, dt = x ds e:∫ x y
x
dt
t=
∫ y
1
ds
s= ln(y).
ln(xα) = α ln(x); x > 0 e α ∈ R. De fato:
ln(xα) =
∫ xα
1
dt
t.
Fazendo t = sα, tem-se, dt = α sα−1 ds e:
∫ xα
1
dt
t= α
∫ x
1
ds
s= α ln(x).
Em particular, ln(x
y
)
= ln(x) − ln(y); x, y > 0.
ln(x
y
)
= ln(
x y−1)
= ln(x) + ln(y−1) = ln(x) − ln(y).
Podemos agora definir a função exponencial assim:
y = ex se, e somente se x = ln(y).
Todas as propriedades da função exponencial podem ser demonstradas a partir desta definição.

7.4. DEFINIÇÃODE LOGARITMONATURAL 205
Exemplo 7.3.
1. Calcule∫ e2
eln(x) dx.
>p:=ln(x):
>Int(p, x = exp(1) .. (exp(1))ˆ2) = int(p, x = exp(1) .. (exp(1))ˆ2);
∫ (e1)2
e1ln (x) dx = e2
2. Seja
f(x) =
∫ b
atx dt se x 6= −1
ln( b
a
)
se x = −1.
Verifique se f é contínua em x = −1.
Calculando diretamente:
>p:=tˆx:
>int(p,t):
>F:=unapply(% ,t);
F := t 7→ tx+1
x + 1
>Int(p,t=a..b)=simplify(F(b)-F(a));
∫ b
atx dt = F (b) − F (a) =
bx+1 − ax+1
x + 1.
Por outro lado, aplicando limite:
limx→−1
f(x) = limx→−1
(bx+1 ln(b) − ax+1 ln(a))
= f(−1);
logo, f é contínua em −1. Tente refazer o exercício 3, utilizando:
>Int(p,x=a..b):

206 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
7.4.2 Método de Substituição
Se u = g(x), então du = g′(x) dx; logo,
∫ b
af(g(x)) g′(x) dx =
∫ g(b)
g(a)f(u) du
Utilizamos a seguinte sintaxe:
>p:=função:
>k:=Int(p, x = a .. b);
>k1:=changevar(equação que define a mudança=u,k);
>k2:=value(k1);
7.4.3 Método de Integração por Partes
∫ b
af(x) g′(x) dx = f(x) g(x)
∣
∣
b
a−
∫ b
ag(x) f ′(x) dx
Utilizamos a seguinte sintaxe:
>with(student):
>p:=função:
>a1:=intpar(p,função chamada de u);
>a2:=value(a1);
>Int(p,x=a..b)=a2;
7.4.4 Método para Funções Racianais
Integrai do tipo:
∫ b
a
f(x)
g(x)dx
Utilizamos a seguinte sintaxe:
>with(student):
>p:=função:
>p2:=integrand(p);
>p3:=convert(p2,parfrac,x);
>p4:=Int(p3,x=a..b);
>value(p4);

7.4. DEFINIÇÃODE LOGARITMONATURAL 207
Exemplo 7.4.
1. Verifique que:∫ a
0
f(x)
f(x) + f(a− x)dx =
a
2,
sendo f tal que o integrando seja definido.
Seja:
>p:=f(x)/(f(x)+f(a-x)):
>k:=Int(p, x = 0 .. a);
k :=
∫ a
0
f(x)
f(x) + f(a − x)dx
Fazendo:
>k1:= changevar(u = a-x, k, u);
k1 := −∫ 0
a
f(a − u)
f(a − u) + f(u)du
Por outro lado:
k1 = −∫ 0
a
f(a − u)
f(a − u) + f(u)du =
∫ a
0
f(a − x)
f(a − x) + f(x)dx
logo,
2 k =
∫ a
0
f(x)
f(x) + f(a − x)dx +
∫ a
0
f(a − x)
f(a − x) + f(x)dx =
∫ a
0dx = a.
2. Calcule∫ π
0
cos(x)√
sen(x) + 1dx.
Seja:
>with(student):
>p:=cos(x)/sqrt(sin(x)+1):
>k:=Int(p, x = 0 .. Pi);
k :=
∫ π
0
cos(x)√
sen(x) + 1dx
Fazendo:
>k1:= changevar(sin(x)=u, k, u);

208 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
k1 :=
∫ 1
0
1√u + 1
du
Pois sin(0) = 0 e sin(π/2) = 1
>k2:=value(k1);
k2 := 2 (−1 +√
2)
3. Calcule∫ 2
1(x3 + 5) ln(x) dx.
>with(student):
>f:=(xˆ3 +5)*ln(x):
>a:=Int(f,x=1..2);
a :=
∫ 2
1(x3 + 5) ln(x) dx
>a1:=intparts(a,ln(x));
a1 := 14 ln(2)2 −∫ 2
1
1
4x4 + 5x
xdx
>a2:=value(a1);
a2 := 14 ln(2) − 95
16
>Int(f,x=1..2)=a2;
∫ 2
1(x3 + 5) ln(x) dx = 14 ln(2) − 95
16
4. Calcule∫ 4
1
3x2 + 4x + 2
x3 + 2x2 + xdx.
>f:=(3*xˆ2+4*x+2)/(xˆ3+2*xˆ2+x):
>a:=Int(f,x=1..4);
a :=
∫ 4
1
3x2 + 4x + 2
x3 + 2x2 + xdx
>b:=convert(integrand(a), parfrac, x);
b :=2
x− 1
(x + 1)2+
1
x + 1

7.4. DEFINIÇÃODE LOGARITMONATURAL 209
>a1:=Int(b,x=1..4);
a1 :=
∫ 4
1
(
2
x− 1
(x + 1)2+
1
x + 1
)
dx
>Int(f,x=1..4)=value(a1);
∫ 4
1
3x2 + 4x + 2
x3 + 2x2 + xdx = 3 ln(2) − 3
10+ ln(5)
Aplicação
Seja f uma função integrável sobre [−a, a]. Se f é uma função par:
∫ a
−af(x) dx = 2
∫ a
0f(x) dx (1)
Se f é uma função ímpar:
∫ a
−af(x) dx = 0 (2)
De fato:
∫ a
−af(x) dx =
∫ 0
−af(x) dx +
∫ a
0f(x) dx = −
∫ −a
0f(x) dx +
∫ a
0f(x) dx.
Façamos a seguinte substituição u = −x, então:
−∫ −a
0f(x) dx =
∫ a
0f(−u) du.
Se f é uma função par, segue (1) e se f é uma função ímpar, segue (2).
Exemplo 7.5.
1. Calcule∫ π
4
−π4
tan (x) cos (3x)
x20 + 7x10 + 6x6 + x4 + cos (x)dx.
>p:=tan(x)*cos(3*x)/(xˆ20+7*xˆ10+6*xˆ6+xˆ4+cos(x)):
>int(p,x=-Pi/4..Pi/4);
0
De fato, a função é ímpar.
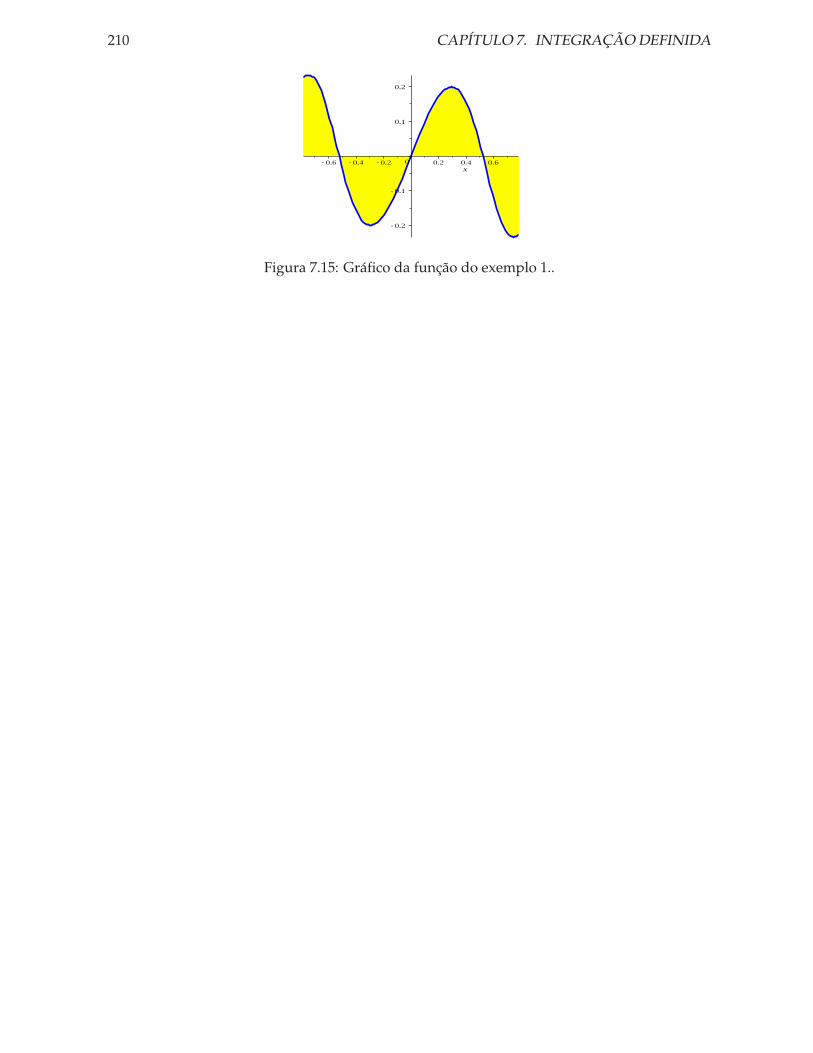
210 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
Figura 7.15: Gráfico da função do exemplo 1..

7.5. EXERCÍCIOS 211
7.5 Exercícios
1. Calcule as seguintes integrais usando o método de substituição:
(a)∫ 3
−1
√2x + 3 dx
(b)∫ π
3
π4
sec2(x)
tg3(x)dx
(c)∫ π
2
0
2 e2x + cos(x)
e2x + sen(x)dx
(d)∫ π
8
0
sec2(2x)√
1 + tg(2x)dx
(e)∫ π
4
0sen(x) cos(x) dx
(f)∫ 1
0
e2x
e2x + 1dx
(g)∫ π
4
0sen(x) ln(cos(x)) dx
(h)∫ π
4
0
sec2(x)
etg(x)dx
(i)∫ 4
1
e√
x
√x
dx
(j)∫ 1
0(2x − 1)100 dx
(k)∫ 3
0
dx
2x + 3
(l)∫ e4
2
dx
x√
ln(x)
(m)∫ 2
0
x2
√x3 + 1
dx
(n)∫ 1
0ex sen(ex) dx
(o)∫ 3
1
x − 2
(3x2 − 12x + 1)4dx
(p)∫ 1
0x2 ex3
dx
(q)∫ 2
1
x3√
x2 + 1dx
(r)∫ 1
0
arcsen(x)√1 − x2
dx
(s)∫ 1
0
dx
1 +√
x
(t)∫ 8
3
sen(√
x + 1)√x + 1
dx
(u)∫ a
0(x − a)
√
2 ax − x2 dx; a 6= 0
(v)∫ π
2
0
cos(x)
6 − 5 sen(x) + sen2(x)dx
(w)∫ 2
1
sen(ln(x))
xdx
(x)∫ 1
0
x2
√x6 + 4
dx
2. Calcule as seguintes integrais usando o método de integração por partes:
(a)∫ 1
0x e−x dx
(b)∫ π
2
0e2x sen(3x) dx
(c)∫ π
03x cos(x) dx
(d)∫ 1
0x4 e−x dx
(e)∫ 4
2x ln(
√x) dx
(f)∫ 1
0arctg(x) dx
(g)∫ 1
2
0
x3
√1 − x2
dx
(h)∫ π
2
π4
x cosec2(x) dx

212 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
(i)∫ 1
0
x ex
(x + 1)2dx
(j)∫ π
3
0x sec(x) tg(x) dx
(k)∫ 4
1ln(
√x) dx
(l)∫ eπ
1cos(ln(x)) dx
(m)∫ 1
0(x2 − 1) ex dx
(n)∫ 4
1e√
x dx
(o)∫ e
1ln3(x) dx
(p)∫ π2
4
0cos(
√x) dx
(q)∫ π
4
0x sec2(x) dx
(r)∫ 1
0arcsen(x) dx
(s)∫ π
3
0sec3(x) dx
(t)∫ π
−πx cos(x) dx
(u)∫ 2
1
√x ln(x) dx
(v)∫ 1
2
0x arcsen(2x) dx
(w)∫ π
2
0cos3(x) dx
(x)∫ 0
−1x√
x + 1 dx
3. Calcule as seguintes integrais:
(a)∫ π
2
π4
cos(x) ln(sen(x)) dx
(b)∫ 1
0x 5x dx
(c)∫ 3√π
0x5 cos(x3) dx
(d)∫ π
3
0tg(x) sec3(x) dx
(e)∫ π
0cos(3x) cos(4x) dx
(f)∫ 1
0
x dx√
(x2 + 4)5
(g)∫ 2
0
dx√x2 + 4x + 8
(h)∫ ln(3)
0et
√
9 − e2t dt
(i)∫ 3
2
(x2 + 2x) dx
x3 + 3x2 − 4
(j)∫ 1
0
(x − 3) dx
(x2 + 4x + 3)2
(k)∫ 2
1
(x4 + 1) dx
x (x2 + 1)
(l)∫ π
2
0
(sen(x) cos2(x)) dx
5 + cos2(x)
(m)∫ 1
0
x2 dx
(x + 1)3
(n)∫ 2
1
dx
4x2 + 12x − 7
(o)∫ 3
1
(2x + 3) dx
x3 + 3x
(p)∫ 3
2
(3x2 − 4x + 5) dx
(x − 1) (x2 + 1)
(q)∫ 1
0
x3 dx3√
x2 + 1
(r)∫ 1
0
√x dx
x + 1
(s)∫ 8
0
3√
x (x − 1) dx
(t)∫ 11
3
dx√2x + 3

7.5. EXERCÍCIOS 213
(u)∫ 1
0
dx√
(1 + x2)3
(v)∫ 4
2
(2x2 + 1)dx
(x + 1)2 (x + 2)
(w)∫ a
0x
√
a2 − x2
a2 + x2dx
(x)∫ π
0
x dx
4 − cos2(x)
4. Calcule as seguintes derivadas:
(a)d
dx
∫ x
0(t2 + 1)
13 dt
(b)d
dx
∫ x
0t sen(t) dt
(c)d
dx
∫ x
1t ln(t) dt
(d)d
dx
∫ x
0
√
1 + t4 dt
(e)d
dx
∫ ex
x
√
1 + t2 dt
(f)d
dx
∫ x2
2sen(t2) dt
(g)d
dx
∫ x
0(2t + t2) dt
(h)d
dx
∫ x3
0
t√1 + t3
dt
5. Seja f uma função contínua em [a, b] e suponha que∫ x
af(t) dt = x, para todo x ∈ [a, b].
Determine f e a.
6. A seguinte função é utilizada em Engenharia Elétrica:
Si(x) =
∫ x
0
sen(t)
tdt; (x > 0).
1. Determine os pontos extremos e esboce seu gráfico.
7. O número:
µ =1
b − a
∫ b
af(x) dx
é chamado valor médio da função f no intervalo [a, b]. Calcule o valor médio das funçõesnos intervalos indicados:
(a) f(x) = sen2(x); [0, π]
(b) f(x) = 5 cos(x); [−π, π]
(c) f(x) = ln(x); [1, 2]
(d) f(x) =x
1 + x2; [0, 1]
(e) f(x) =cos(x)
√
sen(x); [0, π
2 ]

214 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
(f) f(x) = x2 ex; [0, 1]
8. Diga qual das integrais é maior, sem calculá-las:
(a)∫ 1
0
√
1 + x2 dx ou∫ 1
0x dx
(b)∫ 2
1ex2
dx ou∫ 2
1ex dx.
9. Seja a > 0 e suponha que f é uma função contínua no intervalo [−a, a]. Defina g em[−a, a] por:
g(x) =
∫ −x
0f(t) dt +
∫ x
0f(−t) dt,
para todo x ∈ [−a, a].
(a) Verifique que g′(x) = 0, para todo x ∈ [−a, a].
(b) Use a parte a) para verificar que g(x) = 0, para todo x ∈ [−a, a].
(c) Conclua que:∫ 0
−xf(t) dt =
∫ x
0f(−t) dt.
10. Calcule as seguintes integrais sem utilizar métodos de integração:
(a)∫ 10
−10
[
x5 − 6x9 +sen3(x)
(x6 + x4 + x2 + 1)4
]
dx
(b)∫ π
−π
sen( 3√
x7 + x5 + x3)
x4 + cos(x)dx
11. Verifique que para todo n, m ∈ Z:
(a)
∫ π
−πsen(m x) cos(n x) dx = 0
(b)
∫ π
−πsen(m x) sen(n x) dx =
{
0 se n 6= m
π se n = m
(c)∫ π
−πcos(m x) cos(n x) dx =
{
0 se n 6= m
π se n = m

7.5. EXERCÍCIOS 215
12. Calcule∫ π
−πf(x) dx, onde f(x) =
{
sen(x) se x ≤ 0
1 − cos(x) se x > 0
13. Seja g(x) =
∫ α2(x)
α1(x)f(t) dt, onde f : I −→ R é contínua e αi : J −→ R são funções
deriváveis (i = 1, 2); I e J intervalos tais que αi(J) ⊂ I . Verifique que:
g′(x) = f(α2(x))α′
2(x) − f(α1(x))α′
1(x).
14. Calcule g′(x) se g(x) =
∫ x2+x
x2+12−t2 dt.
15. Calcule g′(1
2) se g(x) =
∫ x3
x2
1
tdt.
16. Seja f : R −→ R contínua. Sabendo que∫ 3
−3f(t) dt = 4, calcule
∫ 4
1f(5 − 2x) dx
17. Seja f(x) =
∫ x
0
et2
1 + t2dt. Verifique que f é uma função contínua ímpar e que f(x) ≥ x,
para todo x > 0.
18. Esboce o gráfico de f(x) =
∫ x
02 t e−t2 dt
Logaritmo
1. Verifique que: ln(x) =
∫ x−1
0
du
u + 1.
2. Verifique que: ln(x) = L(x) + R(x), onde L(x) = (x − 1) − 1
2(x − 1)2 +
1
3(x − 1)3 e
R(x) =
∫ x−1
0
u3
u + 1du.
3. Se x > 1 e 0 ≤ u ≤ x − 1, mostre que: R(x) ≤ 1
4(x − 1)4. (R(x) do exercício anterior).
4. Usando os exercícios anteriores conclua que: ln(x) ≃ L(x) com E(x) = |ln(x) − L(x)| ≤1
4(x − 1)4. Equivalentemente, L(x) aproxima ln(x) superiormente, com erro E(x) não
superior a1
4(x − 1)4.
5. Calcule aproximadamente ln(1.2) e E(1.2).

216 CAPÍTULO 7. INTEGRAÇÃODEFINIDA
6. Repita os exercícios 2, 3, 4 e 5 escrevendo:1
u + 1= 1 − u + u2 − u3 + u4 − u5
u + 1.
7. Verifique que: ln(x) ≤ x − 1. Quando vale a igualdade?
8. Verifique quex
1 + x≤ ln(x + 1) ≤ x, para todo x ≥ 1.

Capítulo 8
APLICAÇÕES DA INTEGRALDEFINIDA
8.1 Áreas
O cálculo da área de uma região plana pode ser feito via integral definida. A seguir, estudare-mos as situações mais comuns.
Teorema 8.1.Sejam f, g : [a, b] −→ R funções contínuas. A área de uma região plana R delimitada pelo gráfico dasfunções contínuas y = f(x), y = g(x) e pelas retas x = a e x = b é:
A(R) =
∫ b
a|f(x) − g(x)| dx
Se f(x) ≥ 0 e g(x) = 0, para todo x ∈ [a, b], então:
A(R) =
∫ b
af(x) dx
onde:
R = {(x, y) / a ≤ x ≤ b, 0 ≤ y ≤ f(x)}
b
R
a
y=f(x)
Figura 8.1: R = {(x, y) / a ≤ x ≤ b, 0 ≤ y ≤ f(x)}.
217

218 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Se f(x) ≤ 0 e g(x) = 0, para todo x ∈ [a, b], então:
A(R) = −∫ b
af(x) dx
onde
R = {(x, y) / a ≤ x ≤ b, f(x) ≤ y ≤ 0}
a
R
b
Figura 8.2: R = {(x, y) / a ≤ x ≤ b, f(x) ≤ y ≤ 0}
Se f(x) ≥ g(x), para todo x ∈ [a, b], então:
A(R) =
∫ b
a
[
f(x) − g(x)]
dx
onde
R = {(x, y) / a ≤ x ≤ b, g(x) ≤ y ≤ f(x)}
a b
f
g
R
Figura 8.3: R = {(x, y) / a ≤ x ≤ b, g(x) ≤ y ≤ f(x)}.
Se f(x) ≥ g(x), a ≤ x ≤ c e g(x) ≥ f(x), c ≤ x ≤ b; então, R = R1 ∪ R2, onde:
R1 = {(x, y) / a ≤ x ≤ c, g(x) ≤ y ≤ f(x)} e
R2 = {(x, y) / c ≤ x ≤ b, f(x) ≤ y ≤ g(x)}

8.1. ÁREAS 219
A(R) =
∫ c
a
[
f(x) − g(x)]
dx +
∫ b
c
[
g(x) − f(x)]
dx
a b
f
c
g
Figura 8.4: R = R1 ∪ R2.
Exemplo 8.1.
1. Calcule a área da região limitada pelo eixo dos x e pelo gráfico de y = 4x4 − 5x2 + 1.
Determinemos a interseção da curva com os eixos coordenados:
>with(plots):
>f:=4*xˆ4 -5*xˆ2+1:
>with(RealDomain):
>sol:=solve(f=0,x);
sol := −1, −1
2,
1
2, 1
>a:=plot(f,x = -1 .. 1, filled = true, color = yellow):
>b:=plot(f,x = -1 .. 1, color = blue, thickness=3):
>display(a,b);

220 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Figura 8.5: Gráfico de R.
Seja, R = R1 ∪ R2 ∪ R3 onde:
R1 = {(x, y) ∈ R2 / − 1 ≤ x ≤ −1
2, 4x4 − 5x2 + 1 ≤ y ≤ 0};
R2 = {(x, y) ∈ R2 / − 1
2≤ x ≤ 1
2, 0 ≤ y ≤ 4x4 − 5x2 + 1} e
R3 = {(x, y) ∈ R2 /
1
2≤ x ≤ 1, 4x4 − 5x2 + 1 ≤ y ≤ 0}.
>A:=Int(f,x=sol[1]..sol[2])+Int(f,x=sol[2]..sol[3])+Int(f,x=sol[3]..sol[4]);
A :=
∫ − 12
−1(4x4 − 5x2 + 1) dx +
∫ 12
− 12
(4x4 − 5x2 + 1) dx +
∫ 1
12
(4x4 − 5x2 + 1) dx
>value(% );
1
u.a. (unidades de área).
2. Calcule a área da região limitada pelos gráficos de y = x2 e y = x + 2.
Calculemos as interseções dos gráficos; em outras palavras, resolvamos o seguinte sistema deequações:
{
y = x + 2
y = x2,
>solve(x+2=xˆ2,x);
−1, 2
Os pontos de interseção são (−1, 1) e (2, 4).

8.1. ÁREAS 221
Figura 8.6: A região do exemplo 2.
Notemos que x + 2 ≥ x2 se x ∈ [−1, 2]; logo:
>f:=x+2-xˆ2:
>A:=Int(f,x=-1..2)=int(f,x=-1..2);
A :=
∫ 2
−1(x + 2 − x2) dx =
9
2
3. Calcule a área da região limitada pelos gráficos de y = x2 − x4 e y = x2 − 1.
Calculemos as interseções dos gráficos; em outras palavras, resolvamos o seguinte sistema deequações:
{
y = x2 − x4
y = x2 − 1,
>with(RealDomain):
>solve(xˆ2 -xˆ4=xˆ2-1,x):
−1, 1
Os pontos de interseção são (−1, 0) e (1, 0).

222 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Figura 8.7: A região do exemplo 3.
Notemos que x2 − x4 ≥ x2 − 1 se x ∈ [−1, 1]:
>f:=1-xˆ4:
>A:=Int(f,x=-1..1)=int(f,x=-1..1);
A =
∫ 1
−1(−x4 + 1) dx =
8
5u.a.
4. Calcule a área da região limitada pelos gráficos das seguintes curvas: y2 = ax, a y = x2,y2 = −ax e a y = −x2 se a > 0.
As curvas são parábolas. O esboço da região é um pouco mais complicado (a = 1):
>with(plots):
>a:= plot(xˆ2, x = -1 .. 1, color = white, filled = true);
>b:= plot(sqrt(x), x = -1 .. 1, color = yellow, filled = true);
>a1:= plot(xˆ2, x = -1 .. 1, color = blue, thickness = 3);
>b1:= implicitplot(yˆ2 = x, x = -1 .. 1, y = -1 .. 1, color = red, thickness = 3);
>c:= plot(-xˆ2, x = -1 .. 1, color = white, filled = true);
>c1:= plot(-xˆ2, x = -1 .. 1, color = blue, thickness = 3);
>d:= plot(sqrt(-x), x = -1 .. 1, color = yellow, filled = true);
>d1:= implicitplot(-yˆ2 = x, x = -1 .. 1, y = -1 .. 1, color = red, thickness = 3);
>e:= plot(-sqrt(x), x = -1 .. 1, color = yellow, filled = true);
>e1 := plot(-sqrt(-x), x = -1 .. 1, color = yellow, filled = true);

8.1. ÁREAS 223
>display(a, a1, b, b1, c, c1, d1, d, e, e1);
Figura 8.8: A região do exemplo 4.
Pela simetria da região, podemos calcular a área da região situada no primeiro quadrante emultiplicar o resultado por 4.
Observemos primeiro que y2 = ax não é função de x. Calculemos a interseção das curvas,resolvendo o sistema:
{
y2 = ax
x2 = a y.
>eq1:=yˆ2 =a*x:
>eq2:=subs(y=xˆ2/a,eq1):
>solve(eq2,x);
0, a
são os limites de integração. A região no primeiro quadrante, cuja área queremos calcular élimitada superiormente pela função f(x) =
√ax e inferiormente por g(x) = ax2, logo:
>f:=sqrt(a*x):
>g:=a*xˆ2:
>A:=4*Int(f-g,x=0..a)=4*int(f-g,x=0..a);
A := 4
∫ a
0
(√ax − x2
a
)
dx =4 a2
3
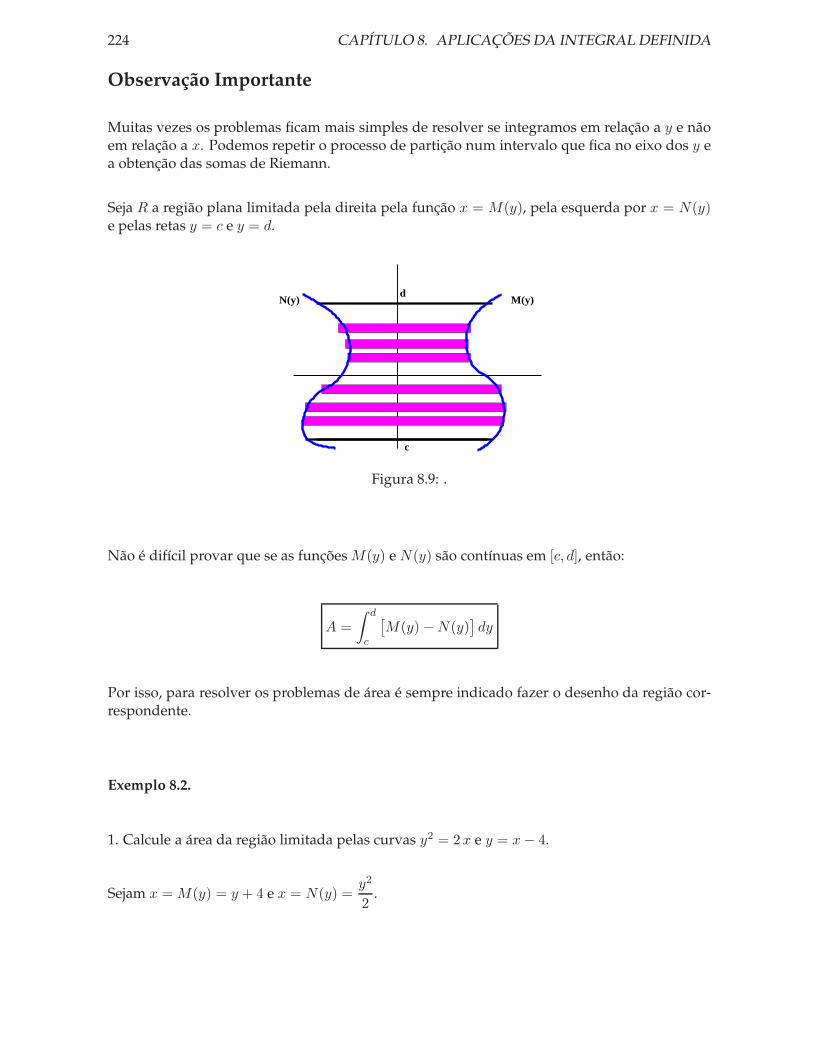
224 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Observação Importante
Muitas vezes os problemas ficam mais simples de resolver se integramos em relação a y e nãoem relação a x. Podemos repetir o processo de partição num intervalo que fica no eixo dos y ea obtenção das somas de Riemann.
Seja R a região plana limitada pela direita pela função x = M(y), pela esquerda por x = N(y)e pelas retas y = c e y = d.
c
M(y)N(y)d
Figura 8.9: .
Não é difícil provar que se as funções M(y) e N(y) são contínuas em [c, d], então:
A =
∫ d
c
[
M(y) − N(y)]
dy
Por isso, para resolver os problemas de área é sempre indicado fazer o desenho da região cor-respondente.
Exemplo 8.2.
1. Calcule a área da região limitada pelas curvas y2 = 2x e y = x − 4.
Sejam x = M(y) = y + 4 e x = N(y) =y2
2.

8.1. ÁREAS 225
-2 2 4 6 8 10
-4
-2
2
4
-2 2 4 6 8 10
-4
-2
2
4
Figura 8.10: A região do exemplo 1.
>M:=yˆ2 /2 :
>N:=y+4:
>solve(M=N,y);
−2, 4
>A:=Int(N-M,x=-2..4)=int(N-M,x=-2..4);
A :=
∫ 4
−2
(
y + 4 − y2
2
)
dy = 18.
2. Calcule a área da região limitada pelas curvas 2 y2 = x + 4 e y2 = x.
Sejam x = M(y) = y2 e x = N(y) = 2 y2 − 4.
-4 -2 2 4
-2
-1
1
2
-4 -2 2 4
-2
-1
1
2
Figura 8.11: A região do exemplo 2.
>M:=2*yˆ2 -4:
>N:=yˆ2:

226 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
>solve(M=N,y);
−2, 2
>A:=Int(N-M,y=-2..2)=2*int(N-M,y=0..2);
A :=
∫ 2
−2(4 − y2) dy =
32
3
3. Calcule a soma das áreas limitadas pela curva y = x sen(x
a
)
e o eixo dos x, sabendo que
x ∈ [0, n π a], sendo n, a ∈ N.
Figura 8.12: A região do exemplo 4.
A =
∫ aπ
0x sen
(x
a
)
dx −∫ 2aπ
aπx sen
(x
a
)
dx + ...... + (−1)n+1
∫ naπ
(n−1)aπx sen
(x
a
)
dx.
Vemos que A = A0 + ........ + An−1, onde Ak é a área limitada pela curva, o eixo dos x, sek a π ≤ x ≤ (k + 1) aπ e k = 0, 1...n − 1, ou seja,
>assume(k::integer):
Em versões anteriores ao MAPLE 12, pode ser utilizado:
>assume(k;integer):
>A[k]:=Int(x*sin(x/a), x = k*a*Pi .. (k+1)*a*Pi);
Ak :=
∫ (k+1)aπ
kaπx sen
(x
a
)
dx
considerando: Ak =
∣
∣
∣
∣
∫ (k+1)aπ
kaπx sen
(x
a
)
dx
∣
∣
∣
∣
, se k é ímpar.
>A[k]:=Int(x*sin(x/a), x = k*a*Pi .. (k+1)*a*Pi)=int(x*sin(x/a), x = k*a*Pi .. (k+1)*a*Pi) ;
Ak :=
∫ (k+1)aπ
kaπx sen
(x
a
)
dx = (2 k + 1) a2 π

8.2. CÁLCULO DO COMPRIMENTO DE ARCO 227
Logo,
A = a2 π (1 + 3 + 5 + ..... + (2n − 1)) = a2 n2 π
pois, 1 + 3 + 5 + ..... + (2n − 1) é soma de termos de uma P.A.
8.2 Cálculo do Comprimento de Arco
Seja a função derivável:
f : [a, b] −→ R.
A porção AB do gráfico de f , comprendida entre os pontos: A = (a, f(a)) e B = (b, f(b)) échamado arco.Nosso interesse é medir o comprimento deste arco. Se a curva é uma reta, para calcular ocomprimento de arco s da reta, compreendido entre os pontos (x1, f(x1)) e (x2, f(x2)), usamoso Teorema de Pitágoras e obtemos:
√
(x2 − x1)2 + (f(x2) − f(x1))2.
Generalizando esta idéia para o gráfico da função contínua f , fazemos uma partição de ordemn do intervalo [a, b]: a = x0 < x1 < ...... < xn = b; denotamos por Qi = (xi, f(xi)), 1 ≤ i ≤ n.
x b=0 i-1 i n
n
i
i-1
1
Q
Q
0Q
a=x x x
Q
Q
Figura 8.13:
Ligando cada Qi−1 a Qi (1 ≤ i ≤ n) por um segmento de reta, obtemos uma linha poligonalformada pela reunião dos segmentos de reta. Como sabemos calcular o comprimento de cadasegmento de reta, sabemos calcular o comprimento da poligonal. Intuitivamente, o compri-mento da poligonal é bastante próximo do comprimento do arco da curva; então:
Ln =n
∑
i=1
√
(xi − xi−1)2 + (f(xi) − f(xi−1))2
é o comprimento da poligonal. Aplicando o Teorema do Valor Médio a f em cada subintervalo[xi−1, xi], vemos que existe ci ∈ (xi−1, xi) tal que f(xi)− f(xi−1) = f ′(ci) (xi − xi−1), para cadai de 1 até n; logo,

228 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Ln =
n∑
i=1
√
(xi − xi−1)2 + (f ′(ci)(xi − xi−1))2 =
n∑
i=1
√
1 + (f ′(ci))2 (xi − xi−1)
=n
∑
i=1
√
1 + (f ′(ci))2 ∆xi,
onde ∆xi = xi − xi−1. Novamente observamos que quando n cresce muito, ∆xi aproxima-sede zero e Ln aproxima-se do comprimento do arco. Se para cada partição do intervalo [a, b], osci são escolhidos como antes, temos que o comprimento do arco AB da curva é:
LAB = lim|∆xi|→0
n∑
i=1
√
1 + (f ′(ci))2∆xi.
Se f ′(x) é uma função contínua em [a, b], é possível provar que o limite anterior sempre existee é igual a L, para qualquer escolha da partição e dos ci. Em tal caso, temos que:
L =
∫ b
a
√
1 + (f ′(x))2 dx
A sintaxe que utilizaremos, é:
>f:=função:
>c:=simplify(diff(f,x)ˆ2 +1);
>cp:=simplify(sqrt(c));
>Int(cp,x=a..b)=int(cp,x=a..b);
Se a curva é o gráfico de uma função x = g(y) definida no intervalo [c, d], com as hipótesesanteriores, temos que:
L =
∫ d
c
√
1 + (g′(y))2 dy
A sintaxe que utilizaremos, é:
>g:=função:
>c:=simplify(diff(g,y)ˆ2 +1);
>cp:=simplify(sqrt(c));
>Int(cp,y=c..d)=int(cp,y=c..d);
As versões mais recentes de MAPLE, tem a seguinte sintaxe para calcular o comprimento dearco:
>with(Student[Calculus1]):
>ArcLength(f(x), x = a..b);

8.2. CÁLCULO DO COMPRIMENTO DE ARCO 229
Exemplo 8.3.
1. Calcule o comprimento de arco da curva y =3√
x2 entre os pontos (8, 4) e (27, 9).
Figura 8.14: Calculamos o comprimento da parte azul.
>with(plots):
>f:= root(xˆ2, 3);
f :=3√
x2
>c:=simplify(diff(f,x)ˆ2 +1);
c :=1
9
4 + 93√
x2
3√
x2
>cp:= simplify(sqrt(c));
cp :=1
3
√
4 + 93√
x2
3√
x2
>Int(cp,x=8..27)=int(cp,x=8..27);
∫ 27
8
1
3
√
4 + 93√
x2
3√
x2dx = −80
27
√5√
2 +85
27
√5√
17
u.c.=unidades de comprimento.
Note que fizemos u = 93√
x2 + 4; logo, du =63√
xdx.
2. Calcule o comprimento de arco da curva y =x4
4+
1
8x2tal que 1 ≤ x ≤ 2.

230 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Figura 8.15: Gráfico de y =x4
4+
1
8x2, calculamos o comprimento da parte azul.
f:=xˆ4 /4+1/(8*xˆ2);
f :=1
4x4 +
1
8x2
>c:=simplify(diff(f,x)ˆ2 +1);
c :=1
16
16x12 + 8x6 + 1
x6
>cp:= simplify(sqrt(c));
cp :=1
4
√
(4x6 + 1)2
x6
>Int(cp,x=1..2)=int(cp,x=1..2);
∫ 2
1
1
4
√
(4x6 + 1)2
x6dx =
123
32
u.c.
3. Calcule o comprimento de arco da curva y = ln(cos(x)) tal que 0 ≤ x ≤ π
4.

8.3. TRABALHO 231
Figura 8.16: Gráfico de y = ln(cos(x)), calculamos o comprimento da parte azul.
>f:=ln(cos(x));
f := ln(cos(x))
>c:=simplify(diff(f,x)ˆ2 +1);
c :=1
cos(x)2
>assume(cos(x)>0):
>cp:= simplify(sqrt(c));
cp :=1
cos(x)
>Int(cp,x=0..Pi/4)=int(cp,x=0..Pi/4);
∫ 1/4 π
0
1
cos(x)dx = −1
2ln(2) + ln(2 +
√2)
u.c.
8.3 Trabalho
Consideremos uma partícula de massa m que se desloca ao longo de uma reta sob a influênciade uma força F .
Da segunda lei de Newton, sabemos que F é dada pelo produto da massa pela sua aceleraçãoa: F = m × a. Se a aceleração é constante, então a força também é constante. O trabalho Wrealizado pela partícula para deslocar-se ao longo de uma reta, percorrendo uma distância d édado pelo produto da força pela distância:
W = F × d,

232 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
W medido em J (Joule).
Se uma força variável y = f(x) (f função contínua ) atua sobre um objeto situado no ponto xdo eixo dos x, o trabalho realizado por esta força quando o objeto se desloca de a até b ao longodeste eixo, é dado por:
W =
∫ b
af(x) dx
W medido em J (Joule).
De fato, suponhamos que a partícula desloca-se ao longo do eixo dos x de x = a até x = b.Consideremos a função contínua
f : [a, b] −→ R.
Subdividamos o intervalo [a, b] efetuando uma partição de ordem n tal que os subintervalos[xi−1, xi] têm o mesmo comprimento ∆x = xi − xi−1, para 1 ≤ i ≤ n. Seja ci ∈ [xi−1, xi]; a forçano ponto ci é f(ci). Se ∆x → 0, a função contínua f restrita ao subintervalo [xi−1, xi] é quaseconstante (varia muito pouco); então o trabalho Wi realizado pela partícula para mover-se dexi−1 até xi é:
Wi∼= f(ci) × ∆x
e o trabalho total Wn, é:
Wn∼=
n∑
i=1
f(ci) ∆x.
É possível provar, com rigor matemático, que o seguinte limite sempre existe e é igual ao tra-balho W realizado pela partícula:
W = limn→+∞
Wn = lim∆x→0
n∑
i=1
f(ci) ∆x.
E mais ainda, este limite não depende da escolha da partição do intervalo ou da escolha dospontos ci.
Exemplo 8.4.
1. Suponha que um partícula é localizada a uma distância de x cm da origem. Uma força de(x4 + 2x3 + 3x2) N age sobre a partícula quando a mesma se move de x = 1 até x = 2. Qual éo trabalho realizado pela partícula para deslocar-se?
Definamos:
>f:=xˆ4 +2*xˆ3 +3*xˆ2:
>W:=Int(f,x=1..2)=int(f,x=1..2);

8.3. TRABALHO 233
W :=
∫ 2
1
(
x4 + 2x3 + 3x2)
dx =207
10
Joules
2. Qual é o trabalho realizado ao se esticar uma mola em 8 cm sabendo que a força de 1N aestica em 1 cm? (N=Newton)
De acordo com a lei de Hooke, a força de y N que estica em xm a mola é dada por y = k x,onde k é uma constante. Como x = 0.01m e y N = 1N , temos k = 100 e y = 100x.
Definamos:
>f:=100*x:
>W:=Int(f,x=0..0.08)=int(f,x=0..0.08);
W :=
∫ 0.08
0100x dx = 0.32
Joules
3. Energia Cinética: O trabalho realizado por uma força f atuando sobre uma partícula demassa m que se move de x1 até x2 é W . Usando a segunda lei de Newton, a regra da cadeia econsiderando que v1 e v2 são as velocidades da partículas em x1 e x2, obtemos:
W =
∫ x2
x1
f(x) dx =m v2
2
∣
∣
∣
∣
v2
v1
=m (v2
2 − v21)
2,
pois:
f = m a = mdv
dt= m v
dv
dx.
A expressão:
m v2
2
é chamada energia cinética do corpo em movimento com velocidade v.
Logo, o trabalho realizado por uma força f é igual à variação da energia cinética do corpo e ocálculo desta variação dará o trabalho realizado.
Qualquer fenômeno que possa ser estudado utilizando partições pode ser modelado por inte-grais definidas. Outras aplicações da integral definida podem ser encontradas nos exercícios.

234 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
8.4 Volume de Sólidos de Revolução
Se giramos uma região plana em torno de uma reta, obtemos o que é chamado um sólido derevolução. A reta em torno da qual a região é girada chama-se eixo de revolução. Por exemplo,considere a seguinte região no plano:
Figura 8.17:
Girando a região em torno do eixo dos x, obtemos:
Figura 8.18: Sólido gerado pela região.
Exemplo 8.5.
1. Seja R a região limitada pelas curvas y = x, −1 ≤ x ≤ 1 e o eixo dos x.

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 235
-1 1
-1
1
-1 1
-1
1
Figura 8.19: A região.
Se giramos a região R em torno do eixo dos x, obtemos o sólido:
Figura 8.20: O sólido.
2. Seja R a região limitada pelo gráfico de y = sen(x) para x ∈ [0, 2π] e o eixo dos x.
1 3 6
-1
1
1 3 6
-1
1
Figura 8.21: A região.
Se giramos a região R em torno do eixo dos x, obtemos o sólido:

236 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Figura 8.22:
Se giramos a região R em torno do eixo dos y, obtemos o sólido:
Figura 8.23:
Sintaxe para ageração de sólido de revolução:
>with(Student[Calculus1]):
>VolumeOfRevolution(função, x = a .. b, output = plot, axis=opção);
As opções são:
axis=horizontal O eixo de revolução é o eixo dos x.
axis=vertical O eixo de revolução é o eixo dos y.
Se não utilizamos a sintaxe axis, o MAPLE assume axis=horizontal.
Clicando o botomdireito domouse sobre o desenho, se abre uma quantidade enorme de opçõespara gráficos em 3D.
Os MAPLE mais novos, tem um manipulador iterativo para 3D; a sintaxe é:
>VolumeOfRevolutionTutor(função, x = a .. b);

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 237
8.4.1 Cálculo do Volume dos Sólidos
Sejam f : [a, b] −→ R uma função contínua tal que f(x) ≥ 0 em [a, b] e a região:
R = {(x, y) / a ≤ x ≤ b, 0 ≤ y ≤ f(x)}
Figura 8.24: A região e o sólido, respectivamente.
Fazendo girar a regiãoR ao redor dos eixo dos x , obtemos um sólido de revolução S. Considerea seguinte partição do intervalo [a, b]:
a = x0 < x1 < x2 < ..... < xn = b.
Como antes, ∆xi = xi − xi−1 é o comprimento de cada subintervalo [xi−1, xi], i variando de 1até n. Em cada subintervalo [xi−1, xi], escolha ci, i variando de 1 até n. Seja Ri o retângulo dealtura f(ci) e base ∆xi, i variando de 1 até n.
a b
f(x)
x xc ii-1 i
R i
Figura 8.25:
Girando Ri em torno do eixo dos x obtemos um cilindro circular reto Ci de volume
f(ci)2 × ∆xiπ.

238 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
R i
∆ i
Ci
x
Rj
Cj
∆xj
Figura 8.26:
A soma dos volumes dos n cilindros é:
Vn = π
n∑
i=1
f(ci)2 ∆xi.
Vn é uma aproximação do volume do sólido de revolução, quando ∆xi aproxima-se de 0, ou,equivalentemente, se n cresce. Intuitivamente estamos “preenchendo” o sólido de revoluçãopor cilindros de altura pequena, dos quais sabemos efetivamente calcular o volume. Seguindoo mesmo raciocínio utilizado quando definimos área de uma região plana, temos:
V (S) = lim|∆xi|→0
πn
∑
i=1
f(ci)2 ∆xi = π
∫ b
af(x)2 dx,
se o limite existe.É possível demonstrar que, se f é contínua, este limite sempre existe e é independente dasescolhas feitas. Se a função f é negativa em algum subconjunto de [a, b], o sólido de revoluçãoobtido a partir da região limitada pelo gráfico de f , o eixo dos x e as retas x = a e x = b coincidecom o sólido de revolução obtido a partir da região limitada pelo gráfico de |f |, o eixo dos xe as retas x = a e x = b. O fato de que o integrando f(x)2 ≥ 0, implica em que seja válida amesma fórmula para ambos os casos.
11
11
Figura 8.27: As regiões e o sólido, respectivamente.

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 239
Figura 8.28:
Proposição 8.1. Sejam f : [a, b] −→ R uma função contínua tal que f(x) ≥ 0 em [a, b] e a região:
R = {(x, y) / a ≤ x ≤ b, 0 ≤ y ≤ f(x)}
Considere o sólido de revolução S obtido girando a região ao redor do eixo dos x. Então o volume V (S)do sólido S é:
V (S) = π
∫ b
af(x)2 dx
Em geral, este processo, pode ser feito para qualquer região limitada pelos gráficos de funçõescontínuas.Sejam f, g : [a, b] −→ R funções contínuas tais que f(x) ≥ g(x) ≥ 0 para todo x ∈ [a, b] e aregião:
R = {(x, y) / a ≤ x ≤ b, g(x) ≤ y ≤ f(x)}
a b
f
g
R
Figura 8.29: R = {(x, y) / a ≤ x ≤ b, g(x) ≤ y ≤ f(x)}.
O volume do sólido de revolução S obtido girando R em torno do eixo dos x é:
V (S) = π
∫ b
a
[
f(x)2 − g(x)2]
dx
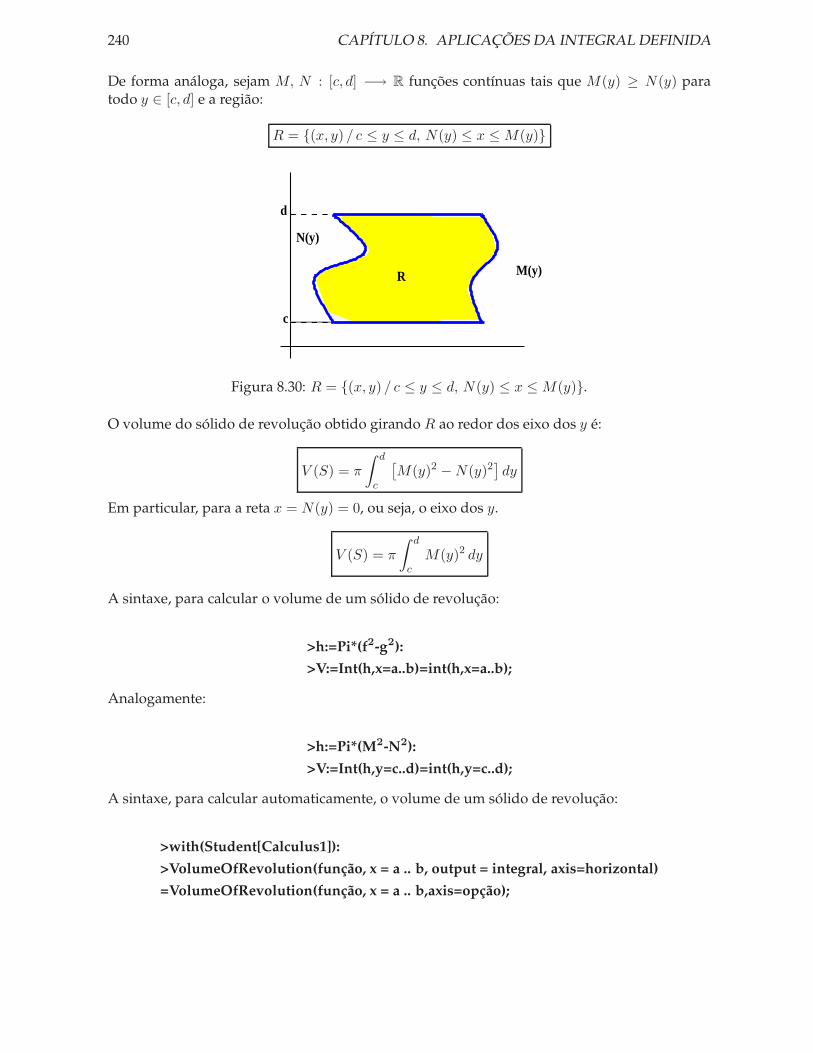
240 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
De forma análoga, sejam M, N : [c, d] −→ R funções contínuas tais que M(y) ≥ N(y) paratodo y ∈ [c, d] e a região:
R = {(x, y) / c ≤ y ≤ d, N(y) ≤ x ≤ M(y)}
����������
c
d
M(y)
N(y)
R
Figura 8.30: R = {(x, y) / c ≤ y ≤ d, N(y) ≤ x ≤ M(y)}.
O volume do sólido de revolução obtido girando R ao redor dos eixo dos y é:
V (S) = π
∫ d
c
[
M(y)2 − N(y)2]
dy
Em particular, para a reta x = N(y) = 0, ou seja, o eixo dos y.
V (S) = π
∫ d
cM(y)2 dy
A sintaxe, para calcular o volume de um sólido de revolução:
>h:=Pi*(f2-g2):
>V:=Int(h,x=a..b)=int(h,x=a..b);
Analogamente:
>h:=Pi*(M2-N2):
>V:=Int(h,y=c..d)=int(h,y=c..d);
A sintaxe, para calcular automaticamente, o volume de um sólido de revolução:
>with(Student[Calculus1]):
>VolumeOfRevolution(função, x = a .. b, output = integral, axis=horizontal)
=VolumeOfRevolution(função, x = a .. b,axis=opção);

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 241
No caso da região ser limitada por duas curvas, utilizamos:
>with(Student[Calculus1]):
>VolumeOfRevolution(função1,função2, x = a .. b, output = integral, axis=horizontal)
=VolumeOfRevolution(função1,função2, x = a .. b,axis=opção);
As opções são:
axis=horizontal O eixo de revolução é o eixo dos x.
axis=vertical O eixo de revolução é o eixo dos y.
Se não utilizamos a sintaxe axis, o MAPLE assume axis=horizontal.
Exemplo 8.6.
1. Calcule o volume do sólido de revolução obtido girando em torno do eixo dos x a regiãolimitada pela curva y = sen(x), x ∈ [0, 2π] e o eixo dos x.
1 3 6
-1
1
1 3 6
-1
1
Figura 8.31: Região do exemplo 1.
>h:=Pi*sin(x)ˆ2:
> Int(h, x = 0 .. 2*Pi) = int(h, x = 0 .. 2*Pi);
∫ 2 π
0π (sin (x))2 dx = π2
Utilizando a livraria Student[Calculus1]:
>f:=sin(x):
>with(Student[Calculus1]):
>VolumeOfRevolution(f, x = 0 .. 2*Pi, output =integral, axis = horizontal) = VolumeOfRevolution(f, x = 0 .. 2*Pi, axis = horizontal);

242 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
∫ 2 π
0π (sin (x))2 dx = π2
Figura 8.32: O sólido do exemplo 1.
2. Calcule o volume do sólido de revolução obtido girando em torno do eixo dos x a região
limitada pelo gráfico de y =1√
x (x + 2), 1 ≤ x ≤ 4 e o eixo dos x.
Figura 8.33: O sólido do exemplo 2.
>h:=Pi/(sqrt(x)*(x+2))ˆ2:
> Int(h, x = 1 .. 4) = int(h, x = 1 .. 4);
∫ 4
1
π
x (x + 2)2dx = − 1
12π +
1
4π ln(2)
Utilizando a livraria Student[Calculus1]:
>with(Student[Calculus1]):

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 243
>f:=1/(sqrt(x)*(x+2)):
>VolumeOfRevolution(f, x = 1 .. 4, output = integral, axes = horizontal)= VolumeOfRevolution(f, x = 1 .. 4);
∫ 4
1
π
x (x + 2)2dx = − 1
12π +
1
4π ln(2)
3. Calcule o volume do sólido de revolução obtido girando em torno do eixo dos x a regiãolimitada pelos gráficos de 4 y = 13 − x2 e 2 y = x + 5.
Figura 8.34: Região do exemplo 3.
>h:=Pi*(((13-xˆ2)/4)ˆ2 -((x+5)/2)ˆ2;
1
16π (69 − 30x2 + x4 − 40x)
>solve((13-xˆ2)/4 -(x+5)/2=0,x);
−3, 1
> Int(h, x = -3 .. 1) = int(h, x = -3 .. 1);
∫ 1
−3
1
16π (69 − 30x2 + x4 − 40x) dx =
64
5π
Utilizando a livraria Student[Calculus1]:
>with(Student[Calculus1]):
>f:=(13-xˆ2)/4:
>g:=(x+5)/2:
>VolumeOfRevolution(f,g, x = -3 .. 1, output = integral, axes = horizontal)= VolumeOfRevolution(f,g, x = -3 .. 1);
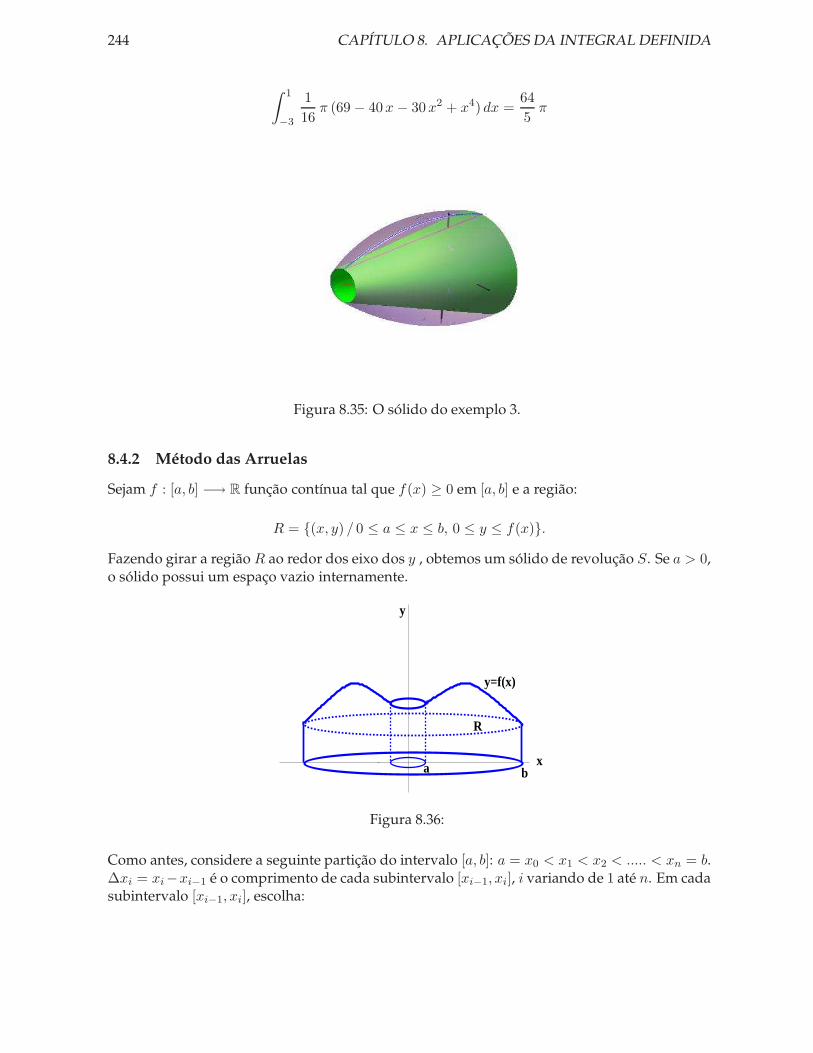
244 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
∫ 1
−3
1
16π (69 − 40x − 30x2 + x4) dx =
64
5π
Figura 8.35: O sólido do exemplo 3.
8.4.2 Método das Arruelas
Sejam f : [a, b] −→ R função contínua tal que f(x) ≥ 0 em [a, b] e a região:
R = {(x, y) / 0 ≤ a ≤ x ≤ b, 0 ≤ y ≤ f(x)}.
Fazendo girar a região R ao redor dos eixo dos y , obtemos um sólido de revolução S. Se a > 0,o sólido possui um espaço vazio internamente.
b
y=f(x)
R
xa
y
Figura 8.36:
Como antes, considere a seguinte partição do intervalo [a, b]: a = x0 < x1 < x2 < ..... < xn = b.∆xi = xi−xi−1 é o comprimento de cada subintervalo [xi−1, xi], i variando de 1 até n. Em cadasubintervalo [xi−1, xi], escolha:

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 245
ci =xi + xi−1
2,
o ponto médio do subintervalo [xi−1, xi], i variando de 1 até n. Seja Ri o retângulo de alturaf(ci) e base ∆xi, i variando de 1 até n. Fazendo girar Ri em torno do eixo dos y obtemos umaarruela cilíndrica Ai de raio médio ci e altura f(ci).
R
y
i
Figura 8.37:
O volume de Ai é 2π ci f(ci)∆xi. A soma dos volumes dos n cilindros é:
Vn = 2π
n∑
i=1
ci f(ci)∆xi.
Vn é uma aproximação do volume do sólido de revolução, quando ∆xi aproxima-se de 0, ouequivalentemente, se n cresce. Intuitivamente estamos “fatiando” o sólido de revolução porinúmeras arruelas de altura pequena, das quais sabemos efetivamente calcular o volume. Se-guindo o mesmo raciocínio anterior, temos:
V (S) = lim|∆xi|→0
2πn
∑
i=1
ci f(ci)∆xi = 2π
∫ b
ax f(x) dx,
se o limite existe.
É possível demonstrar que se f é contínua este limite sempre existe e é independente das esco-lhas feitas. Em geral, este processo pode ser feito para qualquer região limitada pelos gráficosde funções contínuas.
Sejam f, g : [a, b] −→ R funções contínuas tais que f(x) ≥ g(x) ≥ 0 para todo x ∈ [a, b], a ≥ 0 ea região R = {(x, y) / a ≤ x ≤ b, g(x) ≤ y ≤ f(x)}.

246 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
a b
f
g
R
Figura 8.38: R = {(x, y) / a ≤ x ≤ b, g(x) ≤ y ≤ f(x)}
O volume do sólido de revolução S obtido girando R em torno do eixo dos y é:
V (S) = 2π
∫ b
ax (f(x) − g(x)) dx
A sintaxe, para calcular o volume de um sólido de revolução:
>h:=2*Pi*x*(f-g):
>V:=Int(h,x=a..b)=int(h,x=a..b);
Exemplo 8.7.
1 Calcule o volume do sólido de revolução obtido girando em torno do eixo dos y a regiãolimitada pela curva y = (x − 1)2, 0 ≤ x ≤ 2 e o eixo dos x.
Figura 8.39: A região do exemplo 1.
>h:=2*Pi*x*(x-1)ˆ2:
>Int(h,x=0..2)=int(h,x=0..2);
2π
∫ 2
0x (x − 1)2 dx =
4
3π

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 247
Figura 8.40: O sólido do exemplo 1.
2. Calcule o volume do sólido de revolução obtido girando em torno do eixo dos y a regiãolimitada pelas curvas y = x3 − 3x2 + 2x, 0 ≤ x ≤ 2.
Figura 8.41: A região do exemplo 2.
>f:=xˆ3-3*xˆ2+2*x:
>solve(f = 0, x);
0, 2, 1
>h:=2*Pi*x*f:
>Int(h,x=0..2)=int(h,x=0..1)-int(h,x=1..2);
∫ 1
02π x2 (x2 − 3x + 2) dx = 5π

248 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Figura 8.42: O sólido do exemplo 2.
3. Calcule o volume do sólido de revolução obtido girando em torno do eixo dos y a regiãolimitada pelas curvas y = 1 − x6 e y = x4 − 1, 0 ≤ x ≤ 1.
Figura 8.43: A região do exemplo 3.
>h:=2*Pi*x*((1-xˆ6) -(xˆ4 -1)):
>with(RealDomain):
>solve((1-xˆ6 )=(xˆ4 -1)),x);
0, 1
>Int(h,x=0..1)=int(h,x=0..1);
V = 2π
∫ 1
0x (2 − x6 − x4) dx =
17
12π

8.4. VOLUME DE SÓLIDOS DE REVOLUÇÃO 249
Figura 8.44: O sólido do exemplo 3.

250 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
8.5 Exercícios
Áreas
Calcule a área sob o gráfico de y = f(x) entre x = a e x = b, esboçando cada região, se:
1. f(x) = 1 − x2, x = −1, x = 1
2. f(x) = x3 − x, x = −1, x = 1
3. f(x) = x3 − 4x2 + 3x, x = 0, x = 2
4. Sf(x) =x − x3
3, x = −1, x = 1
5. f(x) = ln(x), x = 1, x = e
6. f(x) = cos2(x), x = 0, x = 2π
7. f(x) = 2√
x − 1, x = 1, x = 10
8. f(x) = x (x − 5)2, x = 0, x = 1
9. f(x) =5√
x + 2, x = 0, x = 5
10. f(x) = x√
4x2 + 1, x = 0, x = 2
11. f(x) = |x|, x = −2, x = 6
12. f(x) = (x + 1)3 + 1, x = −2, x = 0
13. f(x) = x2 + 2x, x = −1, x = 3
14. f(x) = x4 − x2, x = −1, x = 1
Calcule a área das regiões limitadas pelas seguintes curvas:
1. y = sen(x), y = cos(x), x = 0, x =π
2
2. y = cos(x), y = 1 − cos(x), x = 0, x =π
2
3. y = x2 + 1, y = x + 1
4. y = x2 − x, y = sen(π x), x = −1, x = 1
5. y = x2, y = −x + 2
6. y = |x|, y = (x + 1)2 − 7, x = −4
7. y = ln(|x|), |y| = 3
8. y = cosh(x), y = senh(x), x = ±1
9. y = ln(x), x = 1, y = 4
10. y = x4 − 2x2, y = 2x2
11. y = cos(x), y = cos2(x), 0 ≤ x ≤ π
12. y = ex, y = e2x−1, x = 0
13. 2 y (1 + y2)3 − x = 0, y = 0, y = 1
14. y =8
x2, y = x, y = 8x, x > 0

8.5. EXERCÍCIOS 251
15. y = x (x − 3), y = x (3 − x)
16. y =
√
1 − x
1 + x, x = 0, x = 1, y = 0
17. y =sen(2x)
2, y =
sen(2x)
2+ sen(2x), 0 ≤ x ≤ π
18. y (x2 + 4) = 4(2 − x) e os eixos coordenados
19. y =1 − x2
1 + x2e o eixo dos x
20. x −√
4y2 − y4 = 0 e o eixo dos y
21. y =1
(2x + 1)2, x = 1, x = 2
22. y =1√
2x + 1, x = 0, x = 4
23. y = e−x, y = x + 1, x = −1
24. y = e−x, y =√
x + 1, x = 1
25. y = ex, y = 10x, y = e
26. y = −x3 + 2x2 + 3x, y = −5x
27. x2 y = 3, 4x + 3 y − 13 = 0
28. x = y (y − 3)2, x = 0
29. y = x4 − 3x2, y = x2
30. x = 1 − y2, x = y2 − 1
31. y = x e−x, y = 0, x = 0, x = c, onde c é a abscissa do ponto de inflexão da curva
32. x2 − 2 y + y2 = 0, x2 + y2 = 1
33. x = 3 y, x + y = 0 e 7x + 3 y = 24
34. x2 = 4 y, y =8
x2 + 4
Comprimento de Arco
Calcule os comprimentos de arco da seguintes curvas, entre os pontos indicados:
1. y = 5x − 2; (−2,−12) e (2, 8)
2. 12x y = 4x4 + 3; (1,7
12) e (3,
109
12)

252 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
3. x − y3
3− 1
4 y= 0; (
7
12, 1) e (
67
24, 3)
4. y = ln(x); (x, y) tal que√
3 ≤ x ≤√
8
5. y =1
6
(
x3 +3
x
)
; (1,2
3) e (3,
14
3)
6. x23 + y
23 = 2
23
7. y =1
3(x2 + 2)
32 ; (x, y) tal que 0 ≤ x ≤ 1
8. y =
∫ x
4
√t − 1 dt, do ponto (4, 0) até (9,
∫ 9
4
√t − 1 dt)
9. y =
∫ x
0t√
t2 + 2 dt, do ponto (0, 0) até (2,
∫ 2
0t√
t2 + 1 dt)
10. y =
∫ x
1
√
t4 + t2 − 1 dt, do ponto (1, 0) até (3,
∫ 3
1
√
t4 + t2 − 1 dt)
11 y =√
x3, do ponto (0, 0) até (1, 1)
11. y =3√
x2, do ponto (0, 0) até (1, 1)
12. y =x4
8+
1
4x2, de x = 1 até x = 3
13. y =2
3x
32 −
√x
2, de x = 1 até x = 4
14. y = ln(sen(x)), de x =π
3até x =
π
2
15. y = ln(sec(x)), de x = 0 até x =π
3
16. y = (1 − x23 )
32 , de x =
1
8até x = 1
17. y = ln(cos(x)) de x = 0 a x = π4
18. y = 2√
x de x = 1 a x = 2
19. y = arcsen(e−x) de x = 0 a x = 1
Trabalho
1. Uma partícula move-se ao longo do eixo dos x do ponto a até o ponto b sob a ação deuma força f(x), dada. Determine o trabalho realizado, sendo:
(a) f(x) = x3 + 2x2 + 6x − 1; a = 1, b = 2

8.5. EXERCÍCIOS 253
(b) f(x) = 8 + 2x − x2; a = 0, b = 3
(c) f(x) =x
(1 + x2)2; a = 1, b = 2
(d) f(x) = (x3 + 2x2 + 1) (3x2 + 4); a = 0, b = 1
(e) f(x) = x2 sen(x); a = 0, b =π
2
(f) f(x) = sen(x) + cos(x); a = 0, b = π
(g) f(x) = e−x sen(x); a = 0, b = 50π
2. Uma bola de ferro é atraída por um imã com uma força de 12x−2 N quando a bola estáa x metros do imã. Qual o trabalho realizado para empurrá-la no sentido contrário ao doimã, do ponto onde x = 2 ao ponto onde x = 6?
3. Uma partícula está localizada a uma distância de x metros da origem. Se uma força de
(x2 + 2x)N é aplicada sobre a partícula. Qual é o trabalho realizado para mover a partí-cula de x = 1 até x = 3?
4. Sobre uma partícula que se desloca sobre o eixo dos x atua uma força cuja componente
na direção do deslocamento é f(x) =2
x2. Calcule o trabalho realizado pela força quando
a partícula se desloca de x = 1 até x = 2.
5. Uma mola tem comprimento de 25 cm e uma força de 54N a estica 1.5 cm. Qual é otrabalho realizado para esticar a mola de 25 cm a 45 cm?
6. Um imã atrai uma bola de ferro com uma força de f(x) =15
x2N quando a bola está a x
metros do imã. Calcule o trabalho realizado para empurrá-la no sentido contrário ao doimã de um ponto onde x = 3 a um ponto onde x = 5.
7. Uma mola suportando um carro tem comprimento de 38 cm e uma força de 36000N acomprime 1.5 cm. Calcule o trabalho realizado para comprimí-la de 38 cm a 12 cm.
8. Duas cargas elétricas e1 = 100 e e2 = 200 se encontram no eixo dos x, respectivamentenos pontos x0 = 0 e x1 = 1 cm. Calcule o trabalho realizado para mover a segunda cargaaté o ponto x2 = 10 cm. Sugestão: Use a segunda lei de Coulomb.
9. Quando um gás se expande mum pistão cilíndrico de raio r, em qualquer instante detempo a pressão é função do volume P = P (V ). A força exercida pelo gás sobre o pistãoé o produto da pressão pela área do pistão F = π r2 P .

254 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
Figura 8.45:
Verifique que o trabalho realizado pelo gás quando o volume se expande de V1 a V2 é:
W =
∫ V2
V1
P dV.
10. Centro de massa: Intuitivamente o centro de massa P de uma lâmina fina é o pontoda lâmina onde, se a levantamos a partir de P paralelamente a um plano horizontal elapermanece paralela (em equilíbrio) em relação ao plano onde foi levantada. F = π r2 P .
P
Figura 8.46:
Considere uma lâmina com densidade uniforme no plano dada por:
R = {(x, y) ∈ R2/ a ≤ x ≤ b, f(x) ≤ y ≤ g(x)},
onde f e g são funções contínuas em [a, b]. Pesquise na bibliografia e verifique que ocentro de massa da lâmina, chamado de centróide de R, é o ponto (x, y) tal que:
x =1
A
∫ b
ax
(
f(x) − g(x))
dx, y =1
2A
∫ b
a
(
f2(x) − g2(x))
dx,
onde A é a área de R. Determine o centróide da lâmina R, determinada por:
(a) y = x, y = x2
(b) y = 3x + 5, y = 0, x = −1 e x = 2
(c) y = cos(2x), y = 0 e x = ±π
4

8.5. EXERCÍCIOS 255
Volumes de Revolução
Determine o volume do sólido de revolução gerado pela rotação, em torno do eixo dos x,da região limitada pelas seguintes curvas:
11. y = x + 1, x = 0, x = 2, y = 0
12. y = x2 + 1, x = 0, y = 0, x = 2
13. y = x2, y = x3
14. y = cos(x), y = sen(x), x = 0, x =π
4
15. x + y = 8, x = 0, y = 0
16. y = x4, y = 1, x = 0
17. x y = 1, x = 2, y = 3
18. x2 = y3 e x3 = y2
19. y = cos(2x), 0 ≤ x ≤ π
20. y = x ex, y = 0 e x = 1
21. O triângulo de vértices (0, 0), (0, 2) e (4, 2)
Determine o volume do sólido de revolução gerado pela rotação, em torno do eixo dos y,da região limitada pelas seguintes curvas:
22. y = ln(x), y = −1, y = 2, x = 0
23. y = 4 − x2, no primeiro quadrante
24. x = 1 + sen(y), x = 0, y = ±5π
2
25. y2 = 4x, y = 0 e x = 4
26. y = 1 − 1
x4, x = 1, y = 0 e y = 15
16
27. 9x2 + 16 y2 = 144
28. y = x2 + 1, x = 0 e x = 2
29. y2 = x, x = 2 y
30. y =√
x2 + 1, x = 0 e x = 2
31. y = 4√
4 − x2, x = 0 e x = 1
Determine o volume do sólido de revolução gerado pela rotação, em torno a reta indicada,da região limitada pelas seguintes curvas:

256 CAPÍTULO 8. APLICAÇÕES DA INTEGRAL DEFINIDA
32. 2x + y = 2 e o eixo dos x
33. y = ex, 1 ≤ x ≤ 2; a reta y = 1
34. y = x4, y = 1; a reta y = 2
35. y =√
x, y = 1 a reta y = 1
36. y = 4 − x2, no primeiro quadrante; a reta x = 2
37. y = 2x − x2; a reta y = 0
38. y = 4 − x2, y = 2; a reta y = 2
39. y =√
x, y = 0 e x = 9; a reta x = 9

Capítulo 9
INTEGRAIS IMPRÓPRIAS
9.1 Introdução
Na definição de integral definida, consideramos a função integranda contínua num intervalofechado e limitado. Agora, estenderemos esta definição para os seguintes casos:
Funções definidas em intervalos do tipo [a,+∞), (−∞, b] ou (−∞,+∞), ou seja para todox ≥ a ou x ≤ b ou para todo x ∈ R, respectivamente.
A função integranda é descontínua em um ponto c tal que c ∈ [a, b].
As integrais destas funções são chamadas integrais impróprias. As integrais impróprias sãode grande utilidade em diversos ramos da Matemática como por exemplo, na solução de equa-ções diferenciais ordinárias via transformadas de Laplace e no estudo das probabilidades, emEstatística.
9.2 Integrais Definidas em Intervalos Ilimitados
Antes de enunciar as definições estudemos o seguinte problema:
Problema: Calcular a área da região R determinada pelo gráfico de:
f : [1,+∞) −→ R
tal que f(x) =1
x2e o eixo dos x.
Primeiramente note que a região R é ilimitada e não é claro o significado de "área"de uma talregião.
257

258 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
Figura 9.1: Gráfico de y = f(x).
Seja Rb a região determinada pelo gráfico de y =1
x2e 1 ≤ x ≤ b, acima do eixo dos x.
11
Figura 9.2: Gráfico de y = f(x), 1 ≤ x ≤ b.
A área de Rb é:
A(Rb) =
∫ b
1
dx
x2= −1
x
∣
∣
b
1= 1 − 1
b.
É intuitivo que para valores de b, muito grandes, a área da região limitada Rb é uma boa apro-ximação da área da região ilimitada R. Isto nos induz a escrever:
A(R) = limb→+∞
A(Rb),
quando o limite existe. Neste caso:
A(R) = limb→+∞
A(Rb) = limb→+∞
∫ b
1
dx
x2= lim
b→+∞(1 − 1
b) = 1u.a.
É comum denotar A(R) por:
∫ +∞
1
dx
x2.

9.2. INTEGRAIS DEFINIDAS EM INTERVALOS ILIMITADOS 259
Esta integral é um exemplo de integral imprópria com limite de integração infinito. Motivadospelo raciocínio anterior temos as seguintes definições:
Definição 9.1.
1. Se f é uma função integrável em [a,+∞), então:
∫ +∞
af(x) dx = lim
b→+∞
∫ b
af(x) dx
2. Se f é uma função integrável em (−∞, b], então:
∫ b
−∞f(x) dx = lim
a→−∞
∫ b
af(x) dx
3. Se f é uma função integrável em R = (−∞,+∞), então:
∫ +∞
−∞f(x) dx = lim
a→−∞
∫ 0
af(x) dx + lim
b→+∞
∫ b
0f(x) dx
Se nas definições anteriores os limites existirem, as integrais impróprias são ditas convergentes;caso contrário são ditas divergentes.
A sintaxes que podemos utilizar são:
>f:=função:
>Int(f,x=a..infinity)=int(f,x=a..infinity);
>Int(f,x=-infinity..b)=int(f,x=-infinity..b);
>Int(f,x=-infinity..infinity)=int(f,x=-infinity..infinity);
Ou alternativamente:
>f:=função:
>Int(f,x=a..infinity)=limit(int(f,x=a..b),b=infinity);
>Int(f,x=-infinity..b)=limit(int(f,x=c..b),c=-infinity);
Exemplo 9.1.
Calcule as seguintes integrais impróprias:
1.∫ +∞
0
dx
1 + x2.
>f:=1/(1+xˆ2):

260 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
>Int(f,x=0..infinity)=limit(int(f,x=0..b),b=infinity);
∫ +∞
0
1
1 + x2dx =
π
2
2.∫ +∞
0e−x dx.
>f:=exp(-x):
>Int(f,x=0..infinity)=limit(int(f,x=0..b),b=infinity);∫ ∞
0e−xdx = 1
3.∫ +∞
−∞e−x dx.
Figura 9.3: Gráfico de f(x) = e−x.
∫ +∞
−∞e−x dx =
∫ 0
−∞e−x dx +
∫ +∞
0e−x dx
>f:=exp(-x):
>Int(f,x=0..infinity)=limit(int(f,x=0..b),b=infinity);
∫ ∞
0e−xdx = 1
>Int(f,x=-infinity..0)=limit(int(f,x=c..0),c=-infinity);
∫ 0
−∞e−xdx = ∞
logo; a integral diverge.

9.2. INTEGRAIS DEFINIDAS EM INTERVALOS ILIMITADOS 261
4. Calcule a área da região, no primeiro quadrante, determinada pelo gráfico de y = 2−x, o eixodos x e à direita do eixo dos y.
Figura 9.4: Gráfico de y = 2−x.
>f:=1/2ˆx:
>A(R):=Int(f,x=0..infinity)=limit(int(f,x=0..b),b=infinity);
A(R) =
∫ ∞
0(2x)−1 dx = (ln (2))−1
u.a.
5. Seja p ∈ R. Calcule∫ +∞
1
dx
xp.
∫ b
1
dx
xp=
1
1 − p(b1−p − 1), p 6= 1
De fato:
>f:=1/xˆp:
>assume(p<>-1,b>0):
>int(f,x=1..b);
−−1 + b−p+1
p − 1
a) Se p > 1:
>assume(p>1):
>Int(f,x=1..infinity)=limit(int(f,x=1..b),b=infinity);∫ ∞
1(xp)−1 dx = (p − 1)−1

262 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
b) Se p < 1:
>assume(p<1):
>Int(f,x=1..infinity)=limit(int(f,x=1..b),b=infinity);
∫ ∞
1(xp)−1 dx = ∞
c) Se p = 1
>Int(1/x,x=1..infinity)=limit(int(1/x,x=1..b),b=infinity);
∫ ∞
1x−1dx = ∞
Em geral:
∫ +∞
1
dx
xp=
∞ se p ≤ 11
p − 1se p > 1.
Portanto, a integral converge para p > 1 e diverge para p ≤ 1.
Muitas vezes não é possível calcular o valor exato de uma integral imprópria, mas, podemosindagar se uma integral imprópria converge ou diverge.
Proposição 9.1. Sejam f e g funções integráveis em [a,+∞) tais que f(x) ≥ g(x) > 0 para todox ≥ a.
1. Se
∫ +∞
af(x) dx converge, então
∫ +∞a g(x) dx converge.
2. Se
∫ +∞
ag(x) dx diverge, então
∫ +∞
af(x) dx diverge.
A prova, segue diretamente das definições. Seja f(x) ≥ 0, para todo x ≥ a. Para mostrar a con-vergência da integral de f , é preciso que f seja menor que uma função cuja integral converge.Para mostrar a divergência da integral de f , é preciso que f seja maior que uma função cujaintegral diverge.
Exemplo 9.2.
1. Analise a convergência da integral:∫ +∞
1
sen(x) + 2√x
dx.

9.3. VALOR PRINCIPAL DE UMA INTEGRAL IMPRÓPRIA 263
Figura 9.5: Gráfico de sen(x)+2√x
.
>f:=(sin(x)+2)/sqrt(x):
>Int(f, x = 1 .. infinity) = limit(int(f, x = 1 .. b), b = infinity);∫ ∞
1
sin (x) + 2√x
dx = ∞
De fato, considere a seguinte desigualdade:
1√x
=−1 + 2√
x≤ sen(x) + 2√
x.
Por outro lado:∫ +∞
1
2√x
dx diverge; logo, pela proposição, parte 2, temos que a integral dada
diverge.
9.3 Valor Principal de uma Integral Imprópria
Consideremos a integral imprópria:
∫ +∞
−∞f(x) dx.
Chamamos de valor principal da integral imprópria ou valor principal de Cauchy ao limite:
lima→+∞
∫ a
−af(x) dx
se o limite existe. Nesse caso, dizimos que a integral converge no sentido de Cauchy. Anotaçãoque utilizaremos é:
V P
∫ +∞
−∞f(x) dx.
Observações 9.1.

264 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
1. Se a integral imprópria converge, então integral imprópria converge no sentido de Cau-chy. Porém, a reciproca não é verdadeira. De fato, considere:
V P
∫ +∞
−∞x dx.
Sabemos que a integral imprópria∫ +∞
−∞x dx diverge. Por outro lado:
V P
∫ +∞
−∞x dx = lim
a→+∞
∫ a
−ax dx = 0.
2. A diferença entre a integral imprópria e o valor principal da integral imprópria é a se-guinte:
Na definição de integral imprópria a maneira como a → −∞ é independente da formacomo b → +∞. Isto é, os extremos a e b das integrais são fixadas de forma arbitrária, semque deva haver alguma relação entre elas. Já na definição do valor principal da integralimprópria os extremos são fixados de modo a serem simétricos.
3. Se f é ímpar, então:
V P
∫ +∞
−∞f(x) dx = 0 e
∫ +∞
−∞f(x) dx diverge.
4. Se f é par e a integral imprópria converge no sentido de Cauchy, então a integral impró-pria converge e:
∫ +∞
−∞f(x) dx = 2
∫ +∞
0f(x) dx = V P
∫ +∞
−∞f(x) dx.
Se f é uma função contínua em [a, c) ∪ (c, b], a < c < b e tal que:
limx→c+
|f(x)| = limx→c−
|f(x)| = +∞.
O valor principal de Cauchy é definido por:
limε→0+
[∫ c−ε
af(x) dx +
∫ b
c+εf(x) dx
]
quando o limite existe.

9.4. FUNÇÃO GAMA 265
9.4 Função Gama
Se x > 0, a função Gama é definida e denotada por:
Γ(x) =
∫ +∞
0tx−1 e−t dt.
Figura 9.6: Gráfico de Γ[x], x > 0.
A sintaxe que utilizaremos, é:
>GAMMA(x);
Γ(x)
Exemplo 9.3.
1. Calcule Γ(1), Γ(5) e Γ(10)
Digitemos:
>f:=x->GAMMA(x);
f := x 7→ Γ(x)
Logo:
>f(1);f(5);f(10);
1
24
362880
2. Calcule Γ(1
2
)
e Γ(1
3
)

266 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
Digitemos:
>g:=x->GAMMA(x);
g := x 7→ Γ(x)
Logo:
>g(1/2);
√π
>g(1/3);
2
3
π√
3
Γ(2/3)
>evalf(% );
2.678938537
Não é difícil ver que, utilizando integração por partes, obtemos:
Γ(x + 1) = xΓ(x).
Em particular, se n ∈ N, temos que:
Γ(n + 1) = n Γ(n) = n (n − 1) Γ(n − 1) = n (n − 1) . . . 2 × 1 × Γ(1).
Como:
Γ(1) =
∫ +∞
0e−t dt = 1.
Logo, se n ∈ N, temos que:
Γ(n + 1) = n!
Por outro lado, para x > 0 temos:
Γ(x) =1
xΓ(x + 1).
Definamos primeiramente a função Γ, para −1 < x < 0, por:
Γ(x) =1
xΓ(x + 1).

9.4. FUNÇÃO GAMA 267
Exemplo 9.4.
1. Calcule Γ(−0.2):
Γ(−0.2) = − 1
0.2Γ(−0.2 + 1) = − 1
0.2Γ(0.8).
No MAPLE:
>restart;
>f:=x->GAMMA(x+1)/x;
f := x 7→ Γ(x)
x
>f(-0.2);
29.10574284
Logo, podemos definir a função Γ, para −2 < x < −1 por:
Γ(x) =1
xΓ(x + 1).
Exemplo 9.5.
1. Calcular Γ(−1.2)
Γ(−1.2) = − 1
1.2Γ(−1.2 + 1) = − 1
1.2Γ(−0.2) =
1
0.2
1
1.2Γ(0.8).
No MAPLE:
>f(-1.2);
−4.042464284
Continuando este processo, podemos definir a função Γ, para x < 0 por:
Γ(x) =1
xΓ(x + 1).

268 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
9.5 Probabilidades
Uma função f : R −→ R positiva e integrável é chamada função de densidade de probabilidadese:
∫ +∞
−∞f(x) dx = 1
Assim denotamos e definimos a probabilidade de um número x estar comprendido entre a e b(a < b); por:
P (a < x < b) = P (a ≤ x ≤ b) =
∫ b
af(x) dx
Analogamente definimos as outras possibilidades:
P (a < x) = P (a ≤ x) =
∫ +∞
af(x) dx
P (x < b) = P (x ≤ b) =
∫ b
−∞f(x) dx
Também podemos definir o valor esperado ou esperança do número x, como
E(x) =
∫ +∞
−∞x f(x) dx,
onde f é a função de densidade de probabilidade. Por exemplo, se f mede o lucro de umacarteira de ações, a esperança é o lucro esperado que pode propocionar tais ações.
E a variância do número x é definida por:
V (x) =
∫ +∞
−∞
[
x − E(x)]2
f(x) dx
A variável independente x é chamada variável aleatória contínua (v.a.c.) A variância mede adispersão ou espalhamento dos pontos ao redor da média. Por exemplo, se temos uma carteirade ações, a variância mede o risco das ações.
Não é difícil verificar que:
V (x) = E(x2) −[
E(x)]2
.
O desvio padrão de uma função de densidade de probabilidade é definido e denotado por:
σx =√
V (x).
σx fornece uma medida de dispersão da distribuição dos valores de x.
As sintaxes que utilizaremos, são:

9.5. PROBABILIDADES 269
>f:=função:
>P(a < = x <= b) := int(f, x = a .. b);
>P(a < = x) := int(f, x = a .. infinity);
>E :=int(x*f, x = -infinity .. infinity);
>V:=int((x-E)ˆ2,x=-infinity..infinity);
>sigma: =sqrt(V);
Exemplo 9.6.
1. Seja:
f(x) =
0 se 0 > x
ax se 0 ≤ x ≤ 1
2
a (1 − x) se1
2≤ x ≤ 1
0 se x > 1.
(a) Determine a constante a tal que f seja uma função de densidade de probabilidade.
(b) Calcule P (x ≤ 1
2) e P (
1
2≤ x ≤ 3
4) .
(c) Determine E(x), V (x) e σx.
(a) Devemos ter:
∫ +∞
−∞f(x) dx = 1;
logo:
>Int(f(x),x=0..infinity)=int(a*x,x=0..1/2)+int(a*(1-x),x=1/2..1);
∫ +∞
−∞f(x) dx =
a
4
então,a
4= 1 e a = 4:
>f:= piecewise(x < 0, 0, 0 <= x and x < 1/2, 2*x, 1/2 <= x and x <= 1, x > 1, 0);
f :=
0 x < 0
4x 0 ≤ x and x < 1/2
4 (1 − x) 1/2 ≤ x and x ≤ 1
0 otherwise

270 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
-0.5 0.5 1.0 1.5
0.5
1.0
1.5
2.0
Figura 9.7: Gráfico da distribuição f .
(b) Calculamos:
>P(x<=1/2):=int(4*x,x=0..1/2);
P (x ≤ 1
2) :=
1
2
>P(1/2 <=x<=3/4):=int(4*(1-x),x=1/2..3/4);
P (1
2≤ x ≤ 3
4) :=
3
8.
(c) Calculamos:
>E:=int(x*f,x=-infinity..infinity);
E(x) :=1
2.
Determinemos:
>V:=int(f*(x-E)ˆ2),x=-infinity..infinity) ;
V :=1
24.
Finalmente:
>sigma:=evalf(sqrt(V)));
σ := 0.204124
2. Se a venda de cimento (em toneladas), de uma fábrica segue a seguinte função de densidadede probabilidade:
f(x) =
3
2(1 − x2) se 0 ≤ x ≤ 1
0 outro caso.

9.5. PROBABILIDADES 271
Qual é valor esperado de vendas? Determine o desvio padrão.
>f := piecewise(0 <= x and x <= 1, 3/2*(1-xˆ2));
f :=
{
3/2 − 3/2x2 0 ≤ x and x ≤ 1
0 otherwise
O valor esperado é:
>E:= int(f*x, x = -infinity .. infinity);
E :=3
8∼= 0.375.
Por outro lado:
>V:=int(f*(x-E)ˆ2, x = -infinity .. infinity);
V :=19
320
Como :
>sigma:=sqrt(V);
σ := 0.24366
A fábrica venderá mais ou menos 0.244 toneladas de cimento.
9.5.1 Distribuição Uniforme
Definimos a função densidade de probabilidade da distribuição uniforme sobre o intervalo[a, b], por:
f(x) =
1
b − ase a ≤ x ≤ b
0 outro caso
Observe que:∫ +∞
−∞f(x) dx =
1
b − a
∫ b
adx = 1.

272 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
Figura 9.8: Gráfico da distribuição f .
O valor esperado do número x:
E =a + b
2.
A variância:
V =(b − a)2
12.
O desvio padrão:
σx =b − a√
12.
Exemplo 9.7.
1. Um ponto é escolhido aleatóriamente no intervalo [0, 10]. Determine a probabilidade queque o ponto escolhido esteja entre 8 e 8.6.
Definimos a função densidade de probabilidade da distribuição uniforme sobre o intervalo[0, 10], por:
>f:= piecewise(0 <= x and x <= 10, 1/10);
f(x) =
1
100 ≤ x and x ≤ 10
0 otherwise
Logo:
>P(8≤ x≤ 8.5):=int(f,x=8..8.6);
P (8 ≤ x ≤ 8.5) :=0.6
10∼= 0.06.
[2] Suponha que a v.a.c. tem distribuição uniforme com esperança igual a 4 e a variância igual4
3. Determine P (x ≤ 4) e P (3 ≤ x ≤ 4).

9.5. PROBABILIDADES 273
Sabemos que E(x) =a + b
2= 4 e V (x) =
(b − a)2
12=
4
3, logo:
{
eq1 := a + b = 8
eq2 := b − a = 4.
>solve({eq1,eq2},{a,b});
{a = 2, b = 6}Então:
>P(x ≤ 4):=int(f,x=2..4);
P (x ≤ 4) :=1
2=⇒ 50%
E
P(3 ≤ x ≤ 4):=int(f,x=3..4);
P (3 ≤ x ≤ 4) :=1
4=⇒ 25%.
[3] Um atacadista vende entre 100 e 200 toneladas de grãos, com distribuição uniforme deprobabilidade. Sabe-se que o ponto de equilíbrio para esta operação corresponde a uma vendade 130 toneladas. Determine a esperança, a variância e a probabilidade de que o comerciantetenha um prejuízo em um determinado dia.
Note que a = 100 e b = 200, então:
E :=100 + 200
2= 150
V :=(200 − 100)2
12= 833.3.
Como o equilíbrio (não se perde nem se ganha) acontece quando vende 130 toneladas, devemoscalcular:
P (x < 130) :=
∫ 130
100
dx
100=
30
100= 0.3.
Isto é, tem uma probabilidade de 30%.
9.5.2 Distribuição Exponencial
Esta função de densidade de distribuição é frequentemente utilizada para determinar a vidaútil de equipamentos eletrônicos e do tempo entre ocorrências de eventos sucessivos, como porexemplo, o tempo entre chegadas de clientes a uma agência bancária.
Definimos a função densidade de probabilidade da distribuição exponencial de parâmetro α,por:
f(x) =
{
α e−αx se x > 0
0 se x ≤ 0,

274 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
α > 0. Observe que f(x) ≥ 0, para todo x.
Figura 9.9: Gráfico da distribuição exponencial.
Note que:∫ +∞
−∞f(x) dx = 1.
Por outro lado, a probabilidade de que um número x ∈ (a, b) é:
P (a ≤ x ≤ b) = α
∫ b
ae−αx dx = e−a α − e−b α
O valor esperado do número x:
E =1
α.
A variância:V =
1
α2.
O desvio padrão:
σx =1
α.
Exemplo 9.8.
1. Para determinado tipo de baterias de telefone celular, a função de densidade de probabi-lidade onde x horas é o tempo de vida útil de uma bateria escolhida aleatoriamente é dadapor:
f(x) =
e−x/20
20se x > 0
0 se x ≤ 0.
Determine a probabilidade de que uma bateria escolhida aleatoriamente tenha um tempo devida útil entre 10 a 15 horas e de uma que funcione pelomenos 50 horas. Determine a esperançae a variância.
Digitemos:

9.5. PROBABILIDADES 275
>f:= piecewise(0 <= x, (1/20)*exp(-(1/20)*x));
f :=
1
20e−x/20 x > 0
0 otherwise
Devemos calcular P (10 ≤ x ≤ 15) e P (x ≥ 50), então:
>P(10 ≤ x ≤ 15):=int(f,x=10..15);
P (10 ≤ x ≤ 15) := 0.134
aproximadamente, 13.4%.
>P(x ≥50):=int(f,x=50..infinity);
P (x ≥ 50) := 0.082
Aproximadamente 8.2%. Determinemos a esperança e a variância:
E = 20 e V = 400.
Figura 9.10: Gráfico da distribuição exponencial do exemplo [1].
2. O tempo de espera entre o pedido de atendimento num banco é uma v.a.c. com distribuiçãoexponencial, com tempo médio de espera igual a 10 minutos. Determine a probabilidade dotempo de espera superior a 10 minutos. Ache a esperança e a variância.
Note que E =1
α=
1
10= 0.1. Logo, digitemos:
>f:= piecewise(0 <= x, 0.1*exp(-0.1*x));
f :=
{
0.1 e−0.1x x > 0
0 otherwise
Devemos calcular P (10 ≤ x)

276 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
>P(10 ≤ x ):=int(f,x=10..infinity);
P (10 ≤ x) := e−1
aproximadamente, 36.8%, e:
E = 10min. e V = 100min.
9.5.3 Distribuição de Pareto
É uma distribuição frequentemente utilizada em Economia no estudo da distribuição de rendade uma população.
Definimos a função de densidade de probabilidade da distribuição de Pareto, por:
f(x) =
α βα
xα+1se x ≥ β
0 se x < β.
α > 1 e β > 0. O parâmetro β pode ser interpretado como a renda mínima de uma populaçãoe o parâmetro α pode ser interpretado como a dispersão da renda.
Note que:
∫ +∞
−∞f(x) dx = 1.
0.5 1.0 1.5 2.0
0.5
1.0
1.5
2.0
Figura 9.11: Gráfico de f , para α = 3/2 e β = 1/2.
A esperança, a veriância e o desvio padrão, são:

9.5. PROBABILIDADES 277
E =α β
α − 1
V =αβ2
(α − 1)2 (α − 2)
σx =β
α − 1
√
α
α − 2.
Exemplo 9.9.
1. Uma distribuição de Pareto tem esperança e variância 2 e1
2, respectivamente.
(a) Determine a distribuição.
(b) Calcule P (x ≥ 10).
(a) Temos:
E :=α β
α − 1= 2
V :=α β2
(α − 1)2 (α − 2)=
1
2
>solve({E,V},{alpha ,beta});
{α = −2, β = 3}, {α = 4, β =3
2}
logo, como α > 1 temos β =3
2e α = 4, e:
>f:=piecewise(x >= 3/2, 81/(4*xˆ5));
f :=
81
4x5x ≥ 3
2
0 otherwise
(b) Calculamos:
P(x>= 10):=int(f,x=10..infinity);
P (x ≥ 10) := 0.00050625.
2. Numa população a renda é distribuida segundo uma distribuição de Pareto, com α = 3 eβ = 1000.

278 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
(a) Qual é a probabilidade de que uma pessoa ganhe mais de 5000 u.m?
(b) Qual é a probabilidade de que uma pessoa ganhe entre 2000 e 3000 u.m?
(c) Qual é a probabilidade de que uma pessoa ganhe abaixo da média u.m?
Digitemos:
>f:= piecewise(x >= 1000, 3*1000ˆ3/xˆ4);
f :=
3000000000
x41000 ≤ x
0 otherwise
(a) Calculamos:
>P(x>= 5000):=int(f,x=5000..infinity);
P (x ≥ 5000) :=1
125
>evalf(%);
0.008
Logo, 0.8%
(b) Calculamos:
>P(2000 <= x<= 3000):=int(f,x=2000..3000);
P (2000 ≤ x ≤ 3000) :=19
216
>evalf(%);
0.087963
Logo, 8.79%
(c) Calculamos:
>E:=int(f*x,x=1000..infinity);
E := 1500
logo:
>P(x<1500):=int(f,x=1000..1500);
P (x < 1500) :=19
27.
>evalf(%);

9.5. PROBABILIDADES 279
0.703704
Logo, 70.37%
3. Se em duas cidades, as respectivas rendas seguem as seguintes distribuições de Pareto,respectivamente:
f1(x) =
4 × 10004
x5se x ≥ 1000
0 se x < 1000
f2(x) =
5 × 12005
x6se x ≥ 1200
0 se x < 1200.
(a) Qual é o renda médio de cada cidade e o desvio padrão?
(b) Em qual cidade é mais provavel que uma pessoa ganhe mais de 2000 u.m?
(c) Em qual cidade é mais provavel que uma pessoa ganhe entre 2000 e 3000 u.m?
500 1000 1500 2000 2500
0.001
0.002
0.003
0.004
Figura 9.12: Gráfico de f1 e f2, respectivamente.
>f1:=piecewise(x >= 1000, 4*1000ˆ4/xˆ5);
f1 :=
4000000000000
x5x ≥ 1000
0 otherwise
>f2:=piecewise(x >= 1000, 5*1200ˆ5/xˆ6);
f2 :=
12441600000000000
x6x ≥ 1200
0 otherwise

280 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
Denotemos por Ei a média relativa á distribuição fi; analogamente as outras quantidades.
(a) Sabemos que E =α β
α − 1; logo:
E1 :=4000
3= 1333.33 e E2 := 1500.
Por outro lado, o desvio padrão é: σx =β
α − 1
√
α
α − 2; logo:
σ1 = 471.405 e σ2 = 387.298.
Na segunda cidade é provável que se ganhe, em média, mais.
(b) Digitamos:
>P1(2000<x):=int(f1,x=2000..infinity);
P1(2000 < x) :=1
16
>evalf(%);
0.0625
>P1(2000<x):=int(f2,x=2000..infinity);
P2(2000 < x) :=243
3125=
>evalf(%);
0.07776
Na segunda cidade é provável que se ganhe, em média, mais de 2000 u.m.
(c)Digitamos:
>P1(2000<=x<=3000):=int(f1,x=2000..3000);
P1(2000 ≤ x ≤ 3000) :=65
1296
>evalf(%);
0.05015435
>P2(2000<=x<=3000)=int(f2,x=2000..infinity);
P2(2000 ≤ x ≤ 3000) :=211
3125
>evalf(%);
0.06752
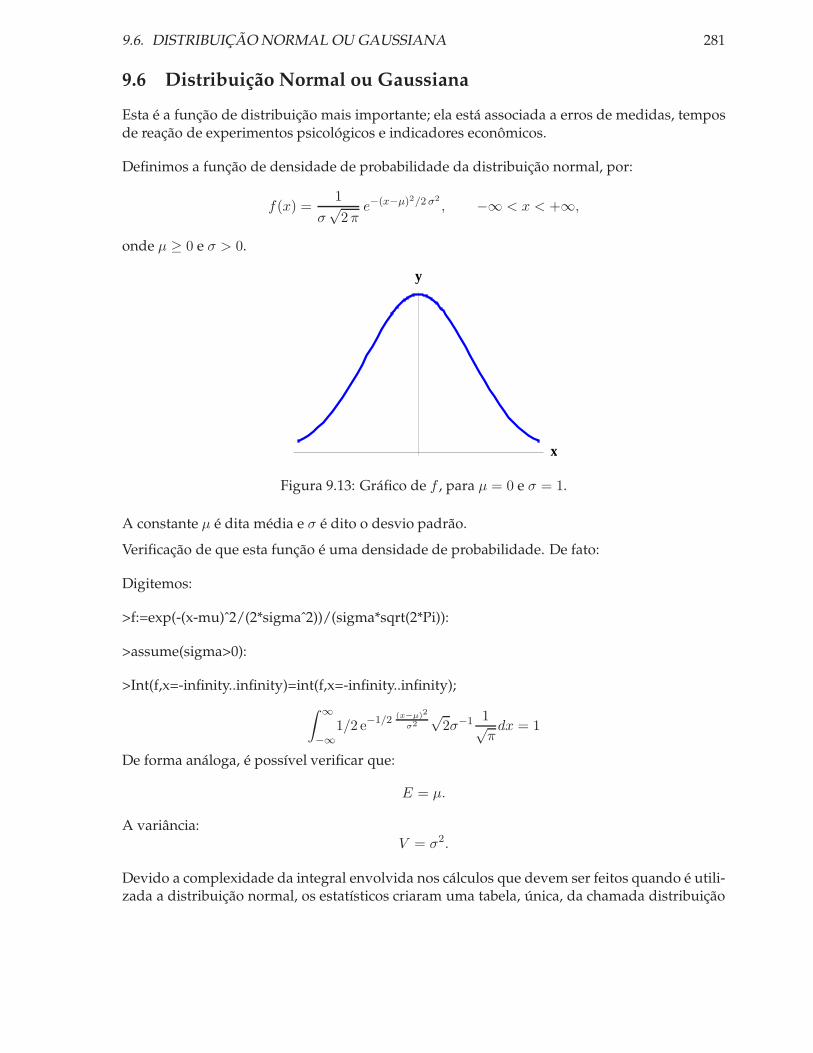
9.6. DISTRIBUIÇÃONORMAL OU GAUSSIANA 281
9.6 Distribuição Normal ou Gaussiana
Esta é a função de distribuição mais importante; ela está associada a erros de medidas, temposde reação de experimentos psicológicos e indicadores econômicos.
Definimos a função de densidade de probabilidade da distribuição normal, por:
f(x) =1
σ√
2πe−(x−µ)2/2 σ2
, −∞ < x < +∞,
onde µ ≥ 0 e σ > 0.
x
y
Figura 9.13: Gráfico de f , para µ = 0 e σ = 1.
A constante µ é dita média e σ é dito o desvio padrão.
Verificação de que esta função é uma densidade de probabilidade. De fato:
Digitemos:
>f:=exp(-(x-mu)ˆ2/(2*sigmaˆ2))/(sigma*sqrt(2*Pi)):
>assume(sigma>0):
>Int(f,x=-infinity..infinity)=int(f,x=-infinity..infinity);∫ ∞
−∞1/2 e−1/2 (x−µ)2
σ2√
2σ−1 1√π
dx = 1
De forma análoga, é possível verificar que:
E = µ.
A variância:V = σ2.
Devido a complexidade da integral envolvida nos cálculos que devem ser feitos quando é utili-zada a distribuição normal, os estatísticos criaram uma tabela, única, da chamada distribuição

282 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
normal padrão; isto é, se σ = 1 e µ = 0. É possível provar que qualquer distribuição normalpode ser transformada numa distribuição normal padrão, fazendo a mudança:
z =x − µ
σ.
Finalmente, observamos que:
1
σ√
2π
∫
e−(x−µ)2/2 σ2dx = −1
2erf
(µ − x√2 σ
)
.
Exemplo 9.10.
1. Um certo tipo de bateria de celular tem, em média, duração de 3 anos com desvio standardσ = 0.5. Se a duração das baterias é normalmente distribuida, determine a probabilidade deuma bateria durar menos que 2.3 anos.
σ = 0.5 e µ = 3, então f(x) = 0.797885 e−2 (−3+x)2 :
>f:=0.797885* exp(-2*(-3 + x)ˆ2):
>P(x<2.3):=int(f,x=0..2.3);
P (x < 2.3) := 0.0807567.
2. Numa prova para concurso, a média das notas foi de 82 com desvio standard σ = 5. Onúmero de pessoas que obtiveram notas entre 88 e 94 foi 8; determine o número de pessoaspresente na prova.
σ = 5 e µ = 82, então f(x) = 0.0797885 e−0.02(−82+x)2 . Supondo que as notas são númerosinteiros:
>f:=0.0797885* exp(-0.02*(-82 + x)ˆ2):
>P(87.5<x<94.5):=int(f,x=87.5..94.5);
P (87.5 < x < 94.5) := 0.129456.
Logo, as 8 pessoas que obtiveram notas entre 88 e 94 representam 12.95% dos alunos; então ototal de alunos é, aproximadamente, 62.
9.6.1 Distribuição Gama
A função Γ = Γ(x) estudada nos capítulos anteriores dá origem à seguinte distribuição, que éutilizada nos fenômenos limitados, como por exemplo, os intervalos de tempo de espera numafila de banco ou para analisar o tempo de permanência de pacientes num hospital.
A função de densidade de probabilidade Gama, de parametros λ > 0 e ν ∈ R, é definida por:
f(x) =
λν
Γ(ν)e−λ x xν−1 se x > 0
0 outro caso.

9.6. DISTRIBUIÇÃONORMAL OU GAUSSIANA 283
Note que se ν = 1, temos a densidade de probabilidade exponencial. Utilizando a definição dafunção gama, obtemos que:
∫ +∞
0e−λ x xν−1 dx =
Γ(ν)
λν.
Donde segue que:∫ +∞
−∞f(x) dx = 1.
2 4 6 8 10
0.1
0.2
0.3
0.4
0.5
Figura 9.14: Gráfico de f , para ν = 1, 2, 3, 4 e λ = 1.
Por outro lado, é possível verificar que:
E(x) =ν
λ.
Analogamente:
V (x) =ν
λ2.
Exemplo 9.11.
1. O tempo, em horas, utilizado para a montagem de um carro segue a distribuição gama. Sea esperança e a variância são 2 e 1, respectivamente. Estime a probabilidade de que um carroseja montado pelo menos em uma hora.
Sabemos que E(x) =ν
λe V (x) =
ν
λ2; logo:
eq1 :=ν
λ= 2
eq2 :=ν
λ2= 1
>solve({eq1,eq2},{λ, ν});
{λ = 2, ν = 4}

284 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
f(x) =
{
16 e−2 x x3 se x > 0
0 outro caso.
0.5 1.0 1.5 2.0 2.5 3.0
0.05
0.10
0.15
0.20
0.25
0.30
Figura 9.15: Gráfico de P (x < 1).
>f:=16*exp(-2*x)*xˆ3:
>P(x<1):=int(f,x=0..1);
P (x < 1) := 6 − 38 e−2
>evalf(%);
0.857259238
2. Se o tempo de sobrevivência no mercado, em anos, de um certo tipo de microempresa seguea distribuição gama para λ = 0.81 e ν = 7.81, determine:
(a) O tempo médio de sobrevivência destas microempresas.
(b) Qual é a probabilidade de que a sobrevivência seja menor que 10 anos.
f(x) =
{
0.0000559896 e−0.81 x x6.81 se x > 0
0 outro caso.

9.7. INTEGRAIS DE FUNÇÕES DESCONTÍNUAS 285
5 10 15 20 25 30
0.02
0.04
0.06
0.08
0.10
0.12
Figura 9.16: Gráfico de f .
>f:=0.0000559896* exp(-0.81*x) *xˆ6.81:
(a) Sabemos que:
E(x) =ν
λ=
7.81
0.81= 9.64198
o tempo médio de sobrevivência é 10 anos.
(b) Digite:
>P(x<10):=int(f,x=0..10);
P (x < 10) := 0.587755
É de quase 60%.
9.7 Integrais de Funções Descontínuas
Como antes, iniciamos o parágrafo, com um problema:
Problema: Calcular a área da região R determinada pelo gráfico de
y =1√x
, x ≤ 9
e o eixo dos x.
Notamos que a região R é ilimitada pois a função f nem é definida no ponto x = 0.
Seja Rε a região determinada pelo gráfico de y =1√x, ε ≤ x ≤ 9 com ε > 0 pequeno e o eixo
dos x..

286 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
99
Figura 9.17: A região Rε.
A área de Rε é:
A(Rε) =
∫ 9
ε
dx√x
= 2√
x
∣
∣
∣
∣
9
ε
=(
6 − 2√
ε)
u.a.
É intuitivo que para valores de ε muito pequenos, a área da região limitada Rε é uma boaaproximação da área da região ilimitada R. Isto nos induz a escrever:
A(R) = limε→0+
A(Rε) = limε→0+
∫ 9
ε
dx√x
= limε→0+
(
6 − 2√
ε)
= 6u.a.
∫ 9
0
dx√xé um exemplo de integral imprópria com integrando ilimitado.
Motivados pelo raciocínio anterior, temos as seguintes definições:
Definição 9.2.
1. Se f é uma função integrável em (a, b], então:
∫ b
af(x) dx = lim
ε→a+
∫ b
εf(x) dx
2. Se f é uma função integrável em [a, b), então:
∫ b
af(x) dx = lim
ε→b−
∫ ε
af(x) dx

9.7. INTEGRAIS DE FUNÇÕES DESCONTÍNUAS 287
a
y=f(x)
b
+ -
Figura 9.18:
3. Se f é uma função integrável em [a, b] exceto em c tal que a < c < b, então:
∫ b
af(x) dx =
∫ c
af(x) dx +
∫ b
cf(x) dx = lim
ε→c−
∫ ε
af(x) dx + lim
σ→c+
∫ b
σf(x) dx
Se nas definições anteriores os limites existirem, as integrais impróprias são ditas convergentes;caso contrário, são ditas divergentes.
As sintaxes que utilizaremos, são:
>f:=função:
>Int(f,x=a..b)=limit(int(f,x=e..b),e=a,right);
>Int(f,x=a..b)=limit(int(f,x=a..e),e=b,left);
Exemplo 9.12.
Calcule as seguintes integrais impróprias:
1.∫ π
2
0
cos(x)√
sen(x)dx.
>f:=cos(x)/sqrt(sin(x)):
>Int(f,x=0..Pi/2)=limit(int(f,x=e..Pi/2),e=0,right);
∫ 1/2 π
0
cos (x)√
sin (x)dx = 2
2.∫ 1
−4
dx3√
x + 2.
Observe que a função integranda não é definida em −2 ∈ [−4, 1].
>f:=1/surd(x+2,3):

288 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
Pesquise no Help do MAPLE por que utilizamos o comado surd.
>Int(f,x=-4..1)=int(f,x=-4..1);
∫ 1
−4
13√
x + 2dx = −3
222/3 +
3
232/3
3. Calcule o comprimento da astróide 3√
x2 + 3√
y2 =3√
a2, a > 0.
Figura 9.19: A astróide para a = 1.
A curva não é diferenciável nos pontos de interseção com os eixos coordenados.
Pela simetria, calcularemos o comprimento da curva no primeiro quadrante e multiplicaremoso resultado por 4.
>g:=surd(xˆ(2),3)+surd(yˆ(2),3):
>assume(x > 0, y > 0, a > 0):
>a:=simplify(sqrt(simplify(implicitdiff(g, y, x)ˆ2+1)));
a :=
√
x2/3 + y2/3
3√
x
>b:=:=simplify(subs(xˆ(2/3)+yˆ(2/3)=aˆ(2/3)),a);
b :=3√
a3√
x
Na última igualdade usamos o fato de que 3√
x2 + 3√
y2 =3√
a2; logo,
>L := 4*(int(b, x = 0 .. a));
L := 6 a
4. Calcule a área limitada por f(x) =1√
x − 2, pelo eixo dos x e pelas retas x = 2 e x = 5.

9.7. INTEGRAIS DE FUNÇÕES DESCONTÍNUAS 289
Figura 9.20: Gráfico de f(x) = 1√x−2
.
>A(R):=int(1/surd(x-2,2),x=2..5);
A(R) := 2√
3
Numa integral imprópria com limite superior infinito e cuja função integranda não é definidano limite inferior, procedemos assim: Se f é integrável em (a,+∞) então
∫ +∞
af(x) dx = lim
ε→a+
∫ c
εf(x) dx + lim
b→+∞
∫ b
cf(x) dx
onde a < c; analogamente nos outros casos.
Aqui utilizamos a sintaxe
Int(f, x = a .. infinity) = int(f, x = a .. infinity);
Exemplo 9.13.
1.∫ +∞
2
dx
x√
x2 − 4.
>f:= 1/(x*sqrt(xˆ2-4)):
>Int(f, x = 2 .. infinity) = int(f, x = 2 .. infinity);
∫ ∞
2
1
x√
x2 − 4dx =
1
4π
2. Calcule a área da região limitada pelo gráfico de y =1√
x (x + 1)e o eixo dos x.

290 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
Figura 9.21: Gráfico de f(x) = 1√x (x+1)
.
>f:= 1/(sqrt(x)*(x+1)):
>Int(f, x = 0 .. infinity) = int(f, x = 0 .. infinity);∫ ∞
0
1√x (x + 1)
dx = π

9.8. EXERCÍCIOS 291
9.8 Exercícios
1. Calcule as seguintes integrais impróprias, caso sejam convergentes:
(a)∫ +∞
1
dx
x√
x
(b)∫ +∞
3
dx
x2 + 9
(c)∫ +∞
0
dx
(x + 1)(x + 2)
(d)∫ +∞
0x e−x2
dx
(e)∫ +∞
−∞|x| e−x2
dx
(f)∫ +∞
2
dx
x ln(x)
(g)∫ +∞
0
cosh(x)
1 + senh(x)dx
(h)∫ 0
−∞x 5−x2
dx
(i)∫ 0
−∞x cosh(x) dx
(j)∫ +∞
1
ln(x)
xdx
(k)∫ +∞
−∞
dx
x2 + 1
(l)∫ +∞
0sen(t π) e−t dt
(m)∫ 1
−∞
dx
(2x − 3)2
(n)∫ +∞
−∞
x
x2 + 1dx
(o)∫ +∞
−∞
dx
x2 + 2x + 5
(p)∫ +∞
1
dx
x3 + x
(q)∫ +∞
0e−x sen(x) dx
(r)∫ +∞
1
x
(x2 + 1)2dx
(s)∫ +∞
0
x3
1 + x4dx
(t)∫ +∞
e2
dx
x ln3(x)
(u)∫ +∞
0x sen(x) dx
(v)∫ 0
−∞
dx
x2 + 1
(w)∫ +∞
1
dx3√
x2
(x)∫ +∞
2
dx
x ln2(x)
2. Calcule a área das regiões determinadas por:
(a) y = (ex + e−x)−1 (b) y = x−2, y = e−2x e x ≥ 1
(c) y = 1x4+1
e o eixo dos x.
3. Determine o valor de s tal que as seguintes integrais impróprias sejam convergentes:
(a)∫ +∞
0e−st dt
(b)∫ +∞
0e−st sen(t) dt
(c)∫ +∞
0e−st et dt
(d)∫ +∞
0t2 e−st dt

292 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
(e)∫ +∞
0e−st senh(t) dt
(f)∫ +∞
0e−st cosh(t) dt
(g)∫ π
2
0
1 − cos(x)
xsdx
(h)∫ π
0
dx
(sen(x))s
4. Seja Γ(x) =∫ +∞0 tx−1 e−t dt, x > 0; esta função é chamada função gama. Verifique:
(a) Γ(x + 1) = xΓ(x), x > 0.
(b) Se n ∈ N, Γ(n + 1) = n!
5. Se o erro envolvido na medição de certos instrumentos eletrônicos tem uma distribuiçãode probabilidade:
f(x) =
{
0.00123 (4 − x2) se − 2 ≤ x ≤ 2
0 outro caso.
(a) Esboce o gráfico de f .
(b) Calcule P (x > 0) e P (−1 < x < 1).
(c) Qual é a esperança e σx?
6. A concentração de um certo contaminante numa lagoa tem uma distribuição de probabi-lidade uniforme em [0, 20] partes por milhão. Se a concentração do contaminante é de 8ou mais partes por milhão, ela é considerada tóxica. Pergunta-se:
(a) Qual é a probabilidade de coletar uma amostra em que a concentração seja tóxica?
(b) Qual é a esperança e a variância?
(c) Qual é a probabilidade de coletar uma amostra em que a concentração seja exata-mente 10.
7. Se o consumo familiar de um certo produto tem uma distribuição de probabilidade uni-forme com esperança igual a 10 e variância igual a 1, determine a probabilidade de que oconsumo esteja entre 8 e 12.
8. O tempo para consertar um liquidificador tem uma distribuição de probabilidade expo-nencial:
f(x) =
{
0.04545 e−x/22 se x > 0
0 se x ≤ 0,
isto é, em média 22 minutos.

9.8. EXERCÍCIOS 293
(a) Determine a probabilidade de que o tempo do conserto seja menor que 10 minutos.
(b) Se o custo do conserto é de 20 u. m. por cada 30 minutos ou fração de reparos; qualé a probabilidade de que um conserto custe 40 u.m?
(c) Para um planejamento futuro, quanto tempo se deve utilizar em cada conserto paraque a probabilidade de que qualquer tempo de reparo maior que o tempo dado sejade 0.1?
9. Numa fábrica de circuitos impressos, a vida útil desses circuitos tem uma distribuiçãodescrita pela densidade de probabilidade exponencial:
f(x) =
{
0.002 e−0.002x se x > 0
0 se x ≤ 0.
(a) Qual é a probabilidade dos circuitos funcionarem em menos de 600 horas?
(b) Qual é a probabilidade dos circuitos continuarem funcionando após 600 horas?
10. Os marcapassos funcionam, com probabilidade exponencial em média, 16 anos.
(a) Qual é a probabilidade de que uma pessoa que já tenha um marcapasso deva reim-plantar um novo antes de 20 anos?
(b) Se o marcapasso estivesse funcionando durante 5 anos, qual é a probabilidade deque o paciente deva reimplantar outro após 25 anos?
11. Numa população a renda é distribuido segundo a distribuição de Pareto, com α = 5 eβ = 2200.
(a) Qual é a probabilidade de que uma pessoa ganhe mais de 1000?
(b) Qual é a probabilidade de que uma pessoa ganhe entre 1000 e 1500?
(c) Qual é a probabilidade de que uma pessoa ganhe abaixo da média?
12. Se em três cidades, as rendas seguem as seguintes distribuições de Pareto para α = 3,β = 1200, α = 4, β = 1300 e α = 5, β = 1500, respectivamente.
(a) Qual é a renda med́io de cada cidade e o desvio padrão?
(b) Em qual cidade é mais provavel que uma pessoa ganhe mais de 2000 u.m?
(c) Em qual cidade é mais provavel que uma pessoa ganhe entre 2000 e 3000?

294 CAPÍTULO 9. INTEGRAIS IMPRÓPRIAS
13. Numa prova de vestibular, amédia das notas foi 50 comdesvio standard σ = 6. O númerode pessoas que obtiveram notas entre 70 e 90 foi 120. Utilize um software matemáticopara determinar o número de pessoas presentes no exame.
14. Se o tempo utilizando um computador com time-sharing segue uma distribuição gamacom média de 20 minutos e variância de 80 minutos, pede-se:
(a) Determine ν e λ.
(b) Qual é a probabilidade de umusuário utilizar o computador nomáximo 20minutos?
(c) Qual é a probabilidade de um usuário utilizar o computador entre 20 e 40 minutos?
15. Se o tempo de sobrevivência de um certo tipo de cirugia, em anos, segue a distribuiçãogama para λ = 0.9 e ν = 81; determine:
(a) O tempo médio de sobrevivência.
(b) Qual é a probabilidade de sobrevivência seja menor de 5 anos.
16. Calcule as seguintes integrais impróprias, caso sejam convergentes:
(a)∫ 4
0
dx√x
(b)∫ 1
0
cos(x13 )
x23
dx
(c)∫ 4
0
dx√16 − x2
(d)∫ 4
0
e−√
x
√x
dx
(e)∫ 1
12
dx
x 7√
(ln(x))2
(f)∫ 1
−1
dx
x3
(g)∫ π
−π
dx
1 − cos(x)
(h)∫ 2
0
dx√2x − x2
(i)∫ 5
4
dx5√
(5 − x)2
(j)∫ 2
1
dx
x2√
4 − x2
(k)∫ 1
0
dx√1 − x2
(l)∫ 3
0
dx
(x − 1)2
(m)∫ π
2
0
dx
cos(x)
(n)∫ 3
1
dx√4x − x2 − 3
(o)∫ 1
0
3x2 + 23√
x2dx
(p)∫ −1
−2
dx
x√
x2 − 1
(q)∫ 2
1
dx
x ln2(x)
(r)∫ 2
1
dx
x√
ln(x)
(s)∫ 2
0
√
2 + x
2 − xdx
(t)∫ 2
π
0
1
x2sen(
1
x) dx
(u)∫ 1
0
dx
(1 − x3)
(v)∫ 1
2
0
dx
x 3√
ln(x)

Bibliografia
[M-M] Maria Hermínia de Paula Leite - Mário Olivero Marques: Introdução ao MAPLE V,visando o ensino de Cálculo Diferencial e Integral I - funções reais de uma variável real, TextoDidático: Projeto PROIN/CAPES - Instituto de Matemática, Universidade FederalFluminense, 1999.
[VC] Mauricio A. Vilches - Maria Luiza Corrêa: Cálculo: Volume I, edição online emwww.ime.uerj.br/∼calculo, 2007.
Bibliografia Suplementar
Angela R. Santos - Waldecir Bianchini: Aprendendo Cálculo com o Maple - Cálculo de uma variável,Ed. Rio de Janeiro: LTC, 2002.
295


















